WO2023067943A1 - 作業機械の制御システムおよび制御方法 - Google Patents
作業機械の制御システムおよび制御方法 Download PDFInfo
- Publication number
- WO2023067943A1 WO2023067943A1 PCT/JP2022/033888 JP2022033888W WO2023067943A1 WO 2023067943 A1 WO2023067943 A1 WO 2023067943A1 JP 2022033888 W JP2022033888 W JP 2022033888W WO 2023067943 A1 WO2023067943 A1 WO 2023067943A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- bucket
- flow rate
- work machine
- control system
- front frame
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 8
- 238000001514 detection method Methods 0.000 claims abstract description 22
- 239000010720 hydraulic oil Substances 0.000 claims description 72
- 230000008859 change Effects 0.000 claims description 35
- 238000005452 bending Methods 0.000 claims description 17
- 239000012530 fluid Substances 0.000 claims description 14
- 238000010586 diagram Methods 0.000 description 20
- 230000007423 decrease Effects 0.000 description 8
- 230000003247 decreasing effect Effects 0.000 description 6
- 230000007935 neutral effect Effects 0.000 description 5
- 239000003921 oil Substances 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 238000009412 basement excavation Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 240000007594 Oryza sativa Species 0.000 description 1
- 235000007164 Oryza sativa Nutrition 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 235000009566 rice Nutrition 0.000 description 1
Images









Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
Definitions
- the present disclosure relates to a work machine control system and control method.
- Patent Document 1 discloses a working machine vibration system for a vehicle having a working machine.
- This disclosure proposes a work machine control system and control method that enable bucket swinging and reduce the load on the vehicle body.
- a work machine control system includes a rear frame, a front frame connected to the rear frame so as to be able to bend, a bucket operable with respect to the front frame, an actuator for driving the bucket, a rear It has a sensor that detects the relative position between the frame and the front frame, and a controller that controls the actuator.
- the controller receives an input of the detection result of the sensor and controls the operation of the actuator based on the detection result of the sensor.
- FIG. 1 is a side view of a wheel loader as an example of a work machine based on an embodiment
- FIG. 1 is a schematic block diagram showing the configuration of an entire system including a wheel loader
- FIG. 2 is a schematic plan view of the wheel loader in an articulated state
- 3 is a block diagram showing the functional configuration of a work implement controller
- FIG. It is a figure which shows the control of the conventional bucket swing operation. It is a figure which shows control of bucket swing operation
- FIG. 4 is a diagram showing a rate of change in flow rate of hydraulic oil supplied to a bucket cylinder with respect to an articulate angle
- FIG. 4 is a diagram showing the flow rate of hydraulic oil supplied to a bucket cylinder during a bucket swinging operation;
- FIG. 1 is a side view of a wheel loader as an example of a work machine based on an embodiment
- FIG. 1 is a schematic block diagram showing the configuration of an entire system including a wheel loader
- FIG. 2
- FIG. 6 is a diagram showing the flow rate of hydraulic oil supplied to the bucket cylinder during the operation of vibrating the bucket at low speed; It is a block diagram showing a functional configuration of a work implement controller of the second embodiment.
- FIG. 10 is a diagram showing the allowable maximum flow rate of hydraulic oil supplied to the bucket cylinder with respect to the articulate angle in the third embodiment;
- FIG. 12 is a diagram showing the flow rate of hydraulic oil supplied to the bucket cylinder during the bucket swinging operation in the third embodiment;
- FIG. 1 is a side view of a wheel loader 1 as an example of a work machine based on an embodiment.
- the wheel loader 1 includes a vehicle body frame 2, a working machine 3, a travel device 7, and a cab 5.
- a vehicle body (working machine body) of the wheel loader 1 is composed of the vehicle body frame 2, the cab 5, and the like.
- a working machine 3 and a traveling device 7 are attached to the vehicle body of the wheel loader 1 .
- the traveling device 7 causes the vehicle body of the wheel loader 1 to travel, and includes traveling wheels 7A and 7B.
- the wheel loader 1 is a wheeled vehicle provided with running wheels 7A and 7B as running rotating bodies on both sides in the left-right direction of the vehicle body.
- the wheel loader 1 can be self-propelled by rotationally driving the running wheels 7A and 7B, and can perform desired work using the working machine 3 .
- the direction in which the wheel loader 1 travels straight is referred to as the front-rear direction of the wheel loader 1.
- the front-rear direction of the wheel loader 1 the side on which the work implement 3 is arranged with respect to the body frame 2 is defined as the front direction, and the side opposite to the front direction is defined as the rear direction.
- the left-right direction of the wheel loader 1 is a direction orthogonal to the front-rear direction when the wheel loader 1 on a flat ground is viewed from above.
- the right side and the left side in the horizontal direction as viewed from the front are the right side and the left side, respectively.
- the vertical direction of the wheel loader 1 is a direction orthogonal to a plane defined by the front-rear direction and the left-right direction. In the vertical direction, the side with the ground is the lower side, and the side with the sky is the upper side.
- the body frame 2 includes a front frame 2A and a rear frame 2B.
- the front frame 2A is arranged in front of the rear frame 2B.
- the front frame 2A is flexibly connected to the rear frame 2B.
- the front frame 2A and the rear frame 2B constitute a vehicle body frame 2 having an articulated structure.
- the wheel loader 1 is an articulated work machine in which a front frame 2A and a rear frame 2B are connected.
- a working machine 3 and a pair of left and right running wheels (front wheels) 7A are attached to the front frame 2A.
- the working machine 3 is arranged in front of the vehicle body and supported by the vehicle body of the wheel loader 1 .
- Work implement 3 includes a boom 32 and a bucket 31 .
- Bucket 31 is arranged at the tip of work implement 3 .
- Bucket 31 is a working tool for excavation and loading.
- the work machine 3 includes a boom cylinder 36.
- the front frame 2 ⁇ /b>A and boom 32 are connected by a pair of boom cylinders 36 .
- a base end of the boom cylinder 36 is attached to the front frame 2A.
- a tip of the boom cylinder 36 is attached to the boom 32 .
- the boom cylinder 36 is a hydraulic actuator that vertically moves the boom 32 with respect to the front frame 2A. As the boom 32 moves up and down, the bucket 31 attached to the tip of the boom 32 also moves up and down.
- the work implement 3 further includes a bell crank 33 , a connecting link 34 and a bucket cylinder 35 .
- the bellcrank 33 is rotatably supported on the boom 32 substantially in the center of the boom 32 .
- the bucket cylinder 35 connects the bell crank 33 and the front frame 2A.
- the connecting link 34 is connected to the tip of the bellcrank 33 .
- a connecting link 34 connects the bell crank 33 and the bucket 31 .
- the base end of the bucket cylinder 35 is attached to the front frame 2A.
- a tip of the bucket cylinder 35 is attached to a base end of the bell crank 33 .
- the bucket cylinder 35 is a hydraulic actuator that vertically rotates the bucket 31 with respect to the boom 32 .
- the bucket cylinder 35 is a work implement cylinder that drives the bucket 31 .
- Bucket 31 is configured to be operable with respect to boom 32 .
- Bucket 31 is configured to be operable with respect to front frame 2A.
- a cab 5 on which an operator rides and a pair of left and right running wheels (rear wheels) 7B are attached to the rear frame 2B.
- the box-shaped cab 5 is arranged behind the boom 32 .
- the cab 5 is mounted on the vehicle body frame 2 . Inside the cab 5, there are arranged a seat on which an operator sits, an operation device to be described later, and the like.
- the cab 5 may be mounted on the front frame 2A.
- FIG. 2 is a schematic block diagram showing the configuration of the entire system including the wheel loader 1 according to the embodiment.
- the wheel loader 1 includes a work machine controller 10 , an engine 11 , and a power take off (PTO: power take off device) 12 .
- PTO power take off device
- the engine 11 is a driving source that generates a driving force for driving the work implement 3, and is, for example, a diesel engine.
- the output of engine 11 is controlled by adjusting the amount of fuel injected into the cylinders of engine 11 .
- the PTO 12 distributes the output of the engine 11 to a traveling system that drives the traveling device 7 and a hydraulic system that drives the work implement 3 .
- the engine 11, PTO 12 and hydraulic system are mounted behind the cab 5 on the rear frame 2B.
- the hydraulic system is a mechanism that mainly drives the work implement 3 (for example, the boom 32 and the bucket 31).
- the hydraulic system includes a hydraulic pump 21 for work equipment driven by the PTO 12, a hydraulic pilot type bucket operation valve 22 and a boom operation valve 23 provided in a discharge circuit of the hydraulic pump 21, and the bucket operation valve 22.
- Electromagnetic proportional control valves 24 and 25 for buckets connected to the pilot pressure receiving portions, and electromagnetic proportional control valves 26 and 27 for booms connected to the respective pilot pressure receiving portions of the boom operation valve 23 are provided.
- the working machine 3 is driven by hydraulic oil from the hydraulic pump 21 .
- the hydraulic pump 21 is driven by the engine 11 and operates the work implement 3 with hydraulic oil that it discharges.
- the boom 32 moves up and down when the boom cylinder 36 receives hydraulic fluid from the hydraulic pump 21 and expands and contracts.
- the bucket cylinder 35 is supplied with hydraulic oil from the hydraulic pump 21 and expands and contracts, thereby rotating the bucket 31 up and down.
- the electromagnetic proportional control valves 24 to 27 are connected to a pilot pump (not shown), and operate from the pilot pump to each pilot pressure receiving portion of the boom operation valve 23 and the bucket operation valve 22 in response to a control signal from the work machine controller 10. Control oil supply.
- the electromagnetic proportional control valve 24 contracts the bucket cylinder 35 and switches the bucket operation valve 22 so that the bucket 31 moves in the dumping direction (the direction in which the cutting edge of the bucket 31 moves downward). Further, the electromagnetic proportional control valve 25 extends the bucket cylinder 35 and switches the bucket operation valve 22 so that the bucket 31 moves in the tilt direction (the direction in which the cutting edge of the bucket 31 rises).
- the electromagnetic proportional control valve 26 retracts the boom cylinder 36 and switches the boom operation valve 23 so that the boom 32 is lowered. Further, the electromagnetic proportional control valve 27 extends the boom cylinder 36 and switches the boom operation valve 23 so that the boom 32 is raised.
- An operating device, a boom angle sensor 44 , a bucket angle sensor 45 , a boom bottom pressure sensor 46 and a frame angle sensor 47 are connected to the work machine controller 10 .
- the operating device is provided on the cab 5 .
- the operating device includes a boom operating lever 41 and a bucket operating lever 42 .
- the operating device also includes a steering handle, a steering lever, an accelerator pedal, etc. (not shown).
- the boom operating lever 41 is arranged on the right side of the seat inside the cab 5, for example.
- the boom operating lever 41 incorporates a lever angle sensor that detects the lever angle.
- a boom operating lever 41 is manually operable by an operator to operate the boom 32 .
- the lever angle sensor detects the lever angle corresponding to the amount of operation and outputs it to the work implement controller 10 as a boom lever signal.
- the bucket operating lever 42 is arranged on the right side of the seat inside the cab 5, for example.
- the bucket operating lever 42 incorporates a lever angle sensor that detects the lever angle.
- Bucket operating lever 42 is manually operable by an operator to operate bucket 31 .
- the lever angle sensor detects the lever angle corresponding to the amount of operation and outputs it to the work machine controller 10 as a bucket lever signal.
- the boom operating lever 41 and the bucket operating lever 42 may be composed of separate levers. Alternatively, one lever may have the functions of both the boom operating lever 41 and the bucket operating lever 42 .
- the operation of the lever in the front-rear direction may be set to move the boom 32 up and down
- the operation of the lever in the left-right direction may be set to the operation to rotate the bucket 31 .
- the boom angle sensor 44 is composed of, for example, a rotary encoder or the like provided at the attachment portion (support shaft) of the boom 32 to the vehicle body frame 2, and detects the boom angle between the center line of the boom 32 and the horizontal line. Output a signal.
- the center line of the boom 32 is the YY line in FIG. is the line connecting When line YY in FIG. 2 is along the horizontal line, boom angle sensor 44 outputs a boom angle of 0 degrees.
- the boom angle sensor 44 outputs a positive value when the tip of the boom 32 is raised from the state of the boom angle of 0 degrees, and outputs a negative value when the tip of the boom 32 is lowered.
- Bucket angle sensor 45 is composed of, for example, a rotary encoder provided on the rotating shaft of bellcrank 33, and outputs 0 degrees when bucket 31 is grounded and the cutting edge of bucket 31 is horizontal on the ground.
- a positive value is output
- a negative value is output.
- the boom bottom pressure sensor 46 detects the pressure on the bottom side of the boom cylinder 36 (boom bottom pressure). The boom bottom pressure is high when the bucket 31 is loaded and low when it is empty.
- the frame angle sensor 47 is provided in a bending mechanism that bends the front frame 2A with respect to the rear frame 2B.
- a frame angle sensor 47 detects the relative position between the rear frame 2B and the front frame 2A.
- the bending of the front frame 2A with respect to the rear frame 2B is performed by expanding and contracting an articulated cylinder connected to the front frame 2A and the rear frame 2B.
- the articulated cylinder is a hydraulic actuator that is hydraulically driven to change the bending angle of the front frame 2A with respect to the rear frame 2B.
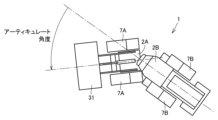
- FIG. 3 is a schematic plan view of the wheel loader 1 in an articulated state.
- Frame angle sensor 47 detects the articulated angle shown in FIG. 3, which is the angle at which front frame 2A bends with respect to rear frame 2B, and outputs a detection signal to work implement controller 10 .
- the frame angle sensor 47 outputs an articulate angle of 0 degrees.
- FIG. 4 is a block diagram showing the functional configuration of the work implement controller 10.
- the work machine controller 10 mainly includes a bucket cylinder target flow rate calculator 51, a bucket swing frequency limiter 52, a bending angle reader 53, and an EPC current determiner 54. .
- the bucket cylinder target flow rate calculation unit 51 receives an input of a bucket lever signal indicating the detection result of the operation amount of the bucket operation lever 42 from the lever angle sensor of the bucket operation lever 42 . Bucket cylinder target flow rate calculation unit 51 calculates a target flow rate of hydraulic oil to be supplied to bucket cylinder 35 for driving bucket 31 based on the bucket lever signal. The bucket cylinder target flow rate calculator 51 outputs the calculated target flow rate of hydraulic oil to the bucket swing frequency limiter 52 .
- the bending angle reading unit 53 receives a signal from the frame angle sensor 47 indicating the detection result of the articulate angle, which is the bending angle of the front frame 2A with respect to the rear frame 2B.
- the bending angle reading section 53 reads the articulate angle based on the signal input from the frame angle sensor 47 .
- the bending angle reading section 53 outputs the detection result of the articulate angle to the bucket swing frequency limiting section 52 .
- the bucket swing frequency limiter 52 controls the operation of the bucket cylinder 35 in response to the operation details of the bucket control lever 42 based on the detection result of the articulate angle. Specifically, the bucket swing frequency limiter 52 changes the movement limit value of the bucket 31 according to the magnitude of the articulate angle. More specifically, the bucket-swing frequency limiter 52 reduces the permissible number of times per unit time of the bucket-swing motion for rapidly vibrating the bucket 31 as the articulate angle increases. Bucket-swing frequency limiter 52 changes the highest frequency at which the operator can operate bucket control lever 42 to swing the bucket, according to the articulate angle. Bucket swing frequency limiter 52 determines a command flow rate of hydraulic oil to be supplied to bucket cylinder 35 according to the magnitude of the articulate angle, and outputs it to EPC current determiner 54 .
- the EPC current determination unit 54 determines a control signal (EPC current) according to the commanded flow rate of hydraulic oil supplied to the bucket cylinder 35 .
- the EPC current determining unit 54 outputs the EPC current to the bucket electromagnetic proportional control valves 24 and 25 connected to the bucket operation valve 22 .
- FIG. 5 is a diagram showing control of a conventional bucket swing operation.
- the horizontal axis of FIG. 5 indicates the articulate angle, and the vertical axis of FIG. 5 indicates the frequency (number of operations per second) at which the operator operates the bucket operating lever 42 .
- the dashed line in FIG. 5 indicates the limit frequency at which the vehicle body of the wheel loader 1 resonates in the roll direction by swinging the bucket.
- a reaction force in the roll direction is applied to the rear frame 2B from the bucket 31 through the boom 32, the bucket cylinder 35, and the front frame 2A. 2B swings in the roll direction.
- the natural frequency for shaking is higher in the roll direction than in the pitch direction. Since the vibration of the vehicle body of the wheel loader 1 in the roll direction is close to the vibration frequency of the bucket 31 , the vehicle body is likely to resonate with the vibration of the bucket 31 . As a result, the sway of the vehicle body of the wheel loader 1 in the roll direction tends to be larger than in the pitch direction. As shown in FIG. 5, the larger the articulate angle, the smaller the limit frequency at which the vehicle body of the wheel loader 1 resonates in the roll direction with respect to the swing of the bucket.
- the solid line in FIG. 5 indicates the conventional limit value of the frequency at which the operator operates the bucket control lever 42.
- the permissible number of bucket vibrating operations per unit time is set constant. Since the movement of the bucket 31 is restricted even when the articulate angle is sufficiently small and the possibility of resonance is small, it is difficult to remove deposits from the bucket 31 by swinging the bucket, resulting in reduced workability. rice field.
- the articulate angle is large, there is a possibility that the vehicle body will vibrate greatly in the roll direction because operation at a frequency higher than the limit frequency at which resonance occurs is permitted.
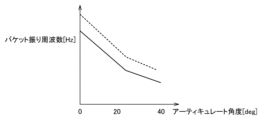
- FIG. 6 is a diagram showing control of the bucket swing operation of the embodiment.
- the horizontal axis in FIG. 6 indicates the articulate angle
- the vertical axis in FIG. 6 indicates the frequency (number of operations per second) at which the operator operates the bucket operating lever 42 .
- the dashed line in FIG. 6 indicates the limit frequency at which the vehicle body of the wheel loader 1 resonates in the roll direction by swinging the bucket, similar to FIG.
- the solid line in FIG. 6 indicates the limit value of the frequency at which the operator operates the bucket control lever 42 in this embodiment.
- the movement limit value of the bucket 31 is changed according to the magnitude of the articulate angle.
- the maximum frequency at which the bucket operating lever 42 can be operated for swinging the bucket is changed according to the articulate angle. Specifically, the larger the articulate angle, the smaller the allowable number of bucket swings per unit time. In order to avoid resonance, the allowable number of swings of the bucket is set to be smaller than the resonance frequency indicated by the dashed line in FIG.
- the rear frame 2B may resonate in the roll direction at a lower frequency. lower the By restricting the movement of the bucket 31 when the articulate angle is large, the occurrence of resonance of the vehicle body can be suppressed, so the load applied to the vehicle body can be reduced.
- Bending angle reading unit 53 receives an input of the detection result of frame angle sensor 47 from frame angle sensor 47 .
- the bucket cylinder target flow rate calculation unit 51 receives an input of the detection result of the operation amount of the bucket operating lever 42 from the bucket operating lever 42 .
- Bucket-swing frequency limiter 52 reads out the allowable number of bucket-swings per unit time based on the articulate angle from the relationship diagram shown in FIG. 6, which is stored in advance.
- Bucket-swing frequency limiter 52 limits the operation of bucket cylinder 35 when the number of bucket swings per unit time according to the operation of bucket operating lever 42 is greater than the allowable number of times based on the articulate angle.
- the amplitude of vibration of the bucket 31 is made smaller than the content of operation of the lever 42. ⁇
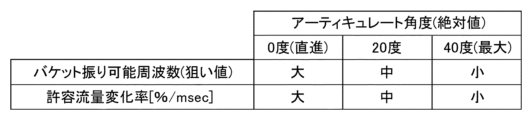
- FIG. 7 is a diagram showing the rate of change in the flow rate of hydraulic oil supplied to the bucket cylinder 35 with respect to the articulate angle. Changing the upper limit value of the oscillation frequency of the bucket 31 according to the articulate angle can be achieved by, for example, limiting the rate of change in the flow rate of hydraulic oil supplied to the bucket cylinder 35 .
- the table is stored in the work machine controller 10 in advance.
- the allowable bucket swing frequency is set to a relatively large “large” value, and the permissible value for the rate of change in hydraulic oil flow rate is also set to a relatively large “large” value.
- the allowable bucket swing frequency is set to an intermediate "medium” value, and the permissible value for the rate of change of the hydraulic oil flow rate is also set to an intermediate “medium” value.
- the allowable bucket swing frequency is set to a relatively small “small” value, and the permissible value for the rate of change in hydraulic oil flow rate is also set to a relatively small "small” value.
- the work implement controller 10 stores in advance specific numerical values of the bucket-swingable frequency and the allowable flow rate of change for articulate angles of 0, 20, and 40 degrees.
- the articulate angle is greater than 0 degrees and less than 20 degrees and greater than 20 degrees and less than 40 degrees
- linear interpolation is used to determine specific numerical values of the bucket swingable frequency and the allowable flow rate of change.
- the bucket-swingable frequency is a set value related to the operation of the bucket control lever 42 by the operator, it is set to a value of about several hertz.
- FIG. 8 is a diagram showing the flow rate of hydraulic oil supplied to the bucket cylinder 35 during the bucket swinging operation.
- the horizontal axis in FIG. 8 indicates time, and the vertical axis in FIG. 8 indicates the flow rate of hydraulic oil supplied to the bucket cylinder 35.
- "0%" in FIG. 8 indicates a state in which the bucket control lever 42 is neutral, the bucket 31 is stopped, and the supply of hydraulic oil to the bucket cylinder 35 is stopped.
- the positive direction of the vertical axis in FIG. 8 indicates the flow rate of hydraulic oil that is supplied to the bottom-side oil chamber of the bucket cylinder 35 and moves the bucket 31 in the tilt direction.
- “+100%” in FIG. 8 is the maximum value of the flow rate of hydraulic oil supplied to the bucket cylinder 35 so as to move the bucket 31 in the tilt direction.
- the negative direction of the vertical axis in FIG. 8 indicates the flow rate of hydraulic oil supplied to the head-side oil chamber of the bucket cylinder 35 to move the bucket 31 in the dumping direction.
- “ ⁇ 100%” in FIG. 8 is the maximum flow rate of hydraulic oil supplied to the bucket cylinder 35 so as to move the bucket 31 in the dumping direction.
- the dashed line in FIG. 8 indicates the target flow rate of hydraulic oil determined by the operation of the bucket control lever 42 by the operator.
- the target flow rate of hydraulic oil indicated by the dashed line in FIG. 8 is the flow rate of hydraulic oil calculated by the bucket cylinder target flow rate calculator 51 and input from the bucket cylinder target flow rate calculator 51 to the bucket swing frequency limiter 52. .
- the solid line in FIG. 8 indicates the command flow rate of the hydraulic oil after limiting the rate of change of the flow rate of the hydraulic oil.
- a command flow rate of hydraulic oil indicated by a solid line in FIG. A control signal based on the command flow rate shown in FIG.
- the operator When swinging the bucket, the operator usually repeats the maximum amount of operation of the bucket control lever 42 that moves the bucket 31 in the tilt direction and the maximum amount of operation of the bucket control lever 42 that moves the bucket 31 in the dump direction.
- the operator starts operating the bucket control lever 42 in the neutral position in the tilt direction at time T1.
- the operator When the operator reaches the maximum amount of operation in the tilt direction at time T2, the operator immediately reduces the amount of operation in the tilt direction.
- the amount of operation in the tilt direction becomes zero at time T3 and the bucket control lever 42 is placed in the neutral state, the operator immediately starts the operation in the dump direction.
- the operator When the operator reaches the maximum amount of operation in the dumping direction at time T4, the operator immediately decreases the amount of operation in the dumping direction.
- the command flow rate of the hydraulic oil indicated by the solid line in FIG. 8 is controlled so as to approach the target flow rate indicated by the broken line.
- the change rate of the flow rate of the hydraulic oil supplied to the bucket cylinder 35 is restricted, and the gradient of the command flow rate graph indicated by the solid line in FIG. 8 is restricted.
- the operation of the bucket control lever 42 is started, and the command flow rate of hydraulic oil also starts to increase, but the command flow rate is smaller than the target flow rate. Even if the operation amount of the bucket control lever 42 starts decreasing at time T2, the command flow rate is still smaller than the target flow rate, so the command flow rate continues to increase.
- the command flow rate continues to increase until the target flow rate and the command flow rate match at time T5. After time T5, the target flow rate becomes smaller than the command flow rate, so the command flow rate decreases so as to approach the target flow rate.
- the operator's operation amount in the tilt direction becomes zero, and the command flow rate continues to decrease after time T3.
- the bucket control lever 42 is operated in the dump direction and the target flow rate in the dump direction is calculated, so the command flow rate of the hydraulic oil is also dumped. direction will start to increase. Even if the operation amount of the bucket control lever 42 starts decreasing at time T4, the command flow rate is still smaller than the target flow rate, so the command flow rate continues to increase. The command flow rate continues to increase until the target flow rate and the command flow rate match at time T7. After time T7, the target flow rate becomes smaller than the command flow rate, so the command flow rate decreases so as to approach the target flow rate.
- the amplitude A of the command flow rate shown in FIG. 8 is smaller than the amplitude of the target flow rate calculated based on the operation of the bucket control lever 42 by the operator. Therefore, the amount by which the bucket 31 moves is small. The operator notices that the amplitude of the movement of the bucket 31 is small and can recognize that the operation of the bucket control lever 42 is too early.
- FIG. 9 is a diagram showing the flow rate of hydraulic oil supplied to the bucket cylinder 35 during the operation of vibrating the bucket at low speed. As in FIG. 8, the horizontal axis of FIG. 9 indicates time, and the vertical axis of FIG. The dashed line in FIG. 9 indicates the target flow rate of the hydraulic oil determined by the operation of the bucket control lever 42 by the operator, and the solid line in FIG. Indicates flow rate.
- the operator operates the bucket control lever 42 at a low speed, and the rate of change in the target flow rate of hydraulic oil calculated based on the details of the operation of the bucket control lever 42 is greater than the rate of change in the command flow rate. Less than limit.
- the command flow rate after the flow rate change rate limitation is equal to the target flow rate.
- the command flow amplitude A0 shown in FIG. 9 is equal to the target flow amplitude.
- the work implement controller 10 receives input of the detection result of the frame angle sensor 47 that detects the relative position between the rear frame 2B and the front frame 2A.
- Work implement controller 10 controls the operation of bucket cylinder 35 based on the detection result of the relative position between rear frame 2B and front frame 2A.
- Work implement controller 10 limits the operation of bucket cylinder 35 based on the detection result of the relative position between rear frame 2B and front frame 2A.
- the cab 5 is mounted on the rear frame 2B, and the operator gets on the cab 5 and operates the wheel loader 1. Since the shaking of the rear frame 2B in the roll direction can be reduced, it is possible to avoid the operator's body in the cab 5 from being shaken from side to side, thereby reducing fatigue of the operator.
- the operating device includes a steering lever for bending the front frame 2A with respect to the rear frame 2B
- the operator tilts the steering lever left and right to bend the front frame 2A
- the rear frame 2B swings left and right, causing the steering lever to bend. Acceleration in the horizontal direction is also applied.
- the bending of the front frame 2A with respect to the rear frame 2B may change unintentionally.
- the lever left and right to move the bucket 31
- the rear frame 2B swings left and right
- the lever is also accelerated in the left and right direction, and the bucket 31 vibrates against the operator's intention. may continue.
- By reducing the rocking of the rear frame 2B in the roll direction it is possible to suppress the rocking of the lever in the left-right direction.
- work implement controller 10 limits the allowable number of operations per unit time for vibrating bucket 31 as the articulate angle at which front frame 2A bends relative to rear frame 2B increases. Therefore, the allowable number of times per unit time may be reduced. As a result, when the articulate angle is small and the vehicle is traveling straight, the bucket can be swung to quickly remove deposits from the bucket 31 . By changing the maximum frequency at which the bucket operation lever 42 can be operated for swinging the bucket according to the articulate angle and restricting the swinging of the bucket when the articulate angle is large, the vibration in the roll direction of the vehicle body is reduced. Therefore, the load applied to the vehicle body can be reduced.
- work implement controller 10 limits the rate of change in the flow rate of hydraulic oil supplied to bucket cylinder 35 as a method of limiting the allowable number of times per unit time that bucket 31 is vibrated. may Since the acceleration of the bucket 31 can be restricted by restricting the rate of change in the flow rate of the hydraulic oil for extending and retracting the bucket cylinder 35, the swinging of the bucket can be reliably restricted.
- the work implement controller 10 may reduce the change rate of the flow rate of hydraulic oil supplied to the bucket cylinder 35 as the articulate angle increases. By doing so, when the articulate angle is large, the swinging motion of the bucket can be restricted, and the shaking of the vehicle body in the roll direction can be reliably reduced.
- the work implement controller 10 receives an input of operation details of the bucket operating lever 42 by the operator for operating the bucket 31 .
- work implement controller 10 may limit the operation of bucket cylinder 35 with respect to the operation of bucket operating lever 42 .
- the amplitude of the bucket 31 can be reduced by restricting the swinging of the bucket.
- the work implement controller 10 controls the amount of hydraulic fluid actually supplied to the bucket cylinder 35 to be higher than the target flow rate of hydraulic oil to the bucket cylinder 35 calculated based on the operation of the bucket control lever 42 .
- the command flow rate of oil may be reduced.
- the work implement controller 10 limits the rate of change in the flow rate of hydraulic oil supplied to the bucket cylinder 35.
- a low-pass filter for the operation of the bucket operating lever 42 may be applied.
- the operation cycle of the bucket operation lever 42 may be measured, and the control may be such that the bucket 31 is stopped when operation at a frequency above a certain level is detected.
- the frequency of operation of the bucket control lever 42 which is the threshold for stopping the bucket 31, may be changed according to the articulate angle.
- Working machines to which the concept of the present disclosure can be applied are not limited to wheel loaders, and other types of hydraulic excavators such as offset boom or swing boom hydraulic excavators in which the bucket can move left and right with respect to the swing frame. It may be a working machine.
- FIG. 10 is a block diagram showing the functional configuration of the work implement controller 10 of the second embodiment.
- the work machine controller 10 of the second embodiment includes an automatic bucket swing frequency determining section 152, a bucket cylinder command flow rate determining section 153, a bending angle reading section 53, and an EPC current determining section .
- the automatic bucket swing input unit 142 shown in FIG. 10 is composed of, for example, a switch or a touch panel. The operator operates the automatic bucket-swinging input unit 142 to input an operation for executing the automatic bucket-swinging motion.
- the bending angle reading unit 53 receives a signal indicating the detection result of the articulate angle from the frame angle sensor 47 .
- the bending angle reading unit 53 outputs the detection result of the articulate angle to the automatic bucket swing frequency determining unit 152 .
- the automatic bucket-swinging frequency determining unit 152 determines the bucket frequency when performing the automatic bucket-swinging motion based on the detection result of the articulate angle. Determine the frequency of vibration of 31. Specifically, the automatic bucket swing frequency determination unit 152 changes the movement limit value of the bucket 31 according to the magnitude of the articulate angle. More specifically, the automatic bucket swing frequency determining unit 152 reduces the number of times the bucket 31 vibrates per unit time as the articulate angle increases.
- a plurality of combinations of articulate angles and automatic bucket swing frequency values corresponding to the articulate angles are stored in the work implement controller 10 in advance as a table.
- the automatic bucket-swing frequency determining section 152 determines the automatic bucket-swinging frequency according to the articulate angle read by the bending angle reading section 53 . If the articulate angle differs from the values defined in the table, linear interpolation is used to determine the specific value of the automatic bucket swing frequency.
- the bucket cylinder command flow rate determination unit 153 determines the command flow rate of hydraulic oil to be supplied to the bucket cylinder 35 according to the magnitude of the articulate angle, and outputs it to the EPC current determination unit 54 .
- the EPC current determination unit 54 determines a control signal (EPC current) according to the commanded flow rate of hydraulic oil supplied to the bucket cylinder 35, and outputs the EPC current to the electromagnetic proportional control valves 24, 25 for buckets.
- FIG. 11 is a diagram showing the allowable maximum flow rate of hydraulic oil supplied to the bucket cylinder 35 with respect to the articulate angle in the third embodiment.
- a table of the allowable maximum flow rate of hydraulic oil supplied to bucket cylinder 35 when the articulate angle is 0 degrees, 20 degrees and 40 degrees, shown in FIG. 11, is stored in work implement controller 10 in advance. The larger the articulate angle, the smaller the allowable maximum flow rate of hydraulic oil supplied to the bucket cylinder 35 .
- the allowable maximum flow rate of hydraulic oil is set to a relatively large value of "large”.
- the allowable maximum flow rate of hydraulic fluid is taken as the intermediate "medium” value.
- the articulate angle is 40 degrees, which is the maximum, the allowable maximum flow rate of hydraulic fluid is set to a relatively small "small” value.
- the work implement controller 10 stores in advance specific numerical values of the allowable maximum flow rate of hydraulic oil for articulate angles of 0 degrees, 20 degrees, and 40 degrees. For articulate angles greater than 0 degrees and less than 20 degrees and greater than 20 degrees and less than 40 degrees, linear interpolation is used to determine specific values for maximum allowable fluid flow.
- FIG. 12 is a diagram showing the flow rate of hydraulic oil supplied to the bucket cylinder 35 during the bucket swing operation in the third embodiment. 8 described in the first embodiment, the horizontal axis in FIG. 11 indicates time, and the vertical axis in FIG. "0%" in FIG. 11 indicates a state in which the supply of hydraulic oil to the bucket cylinder 35 is stopped.
- the positive direction of the vertical axis in FIG. 11 indicates the flow rate of hydraulic oil that moves the bucket 31 in the tilt direction.
- the negative direction of the vertical axis in FIG. 11 indicates the flow rate of hydraulic fluid that moves the bucket 31 in the dumping direction.
- the dashed line in FIG. 11 indicates the target flow rate of hydraulic oil determined by the operation of the bucket control lever 42 by the operator.
- the solid line in FIG. 11 indicates the command flow rate of the hydraulic oil after limiting the flow rate of the hydraulic oil.
- the operator starts to operate the bucket control lever 42 in the neutral position in the tilt direction.
- the operator reaches the maximum amount of operation in the tilt direction at time T2
- the operator immediately reduces the amount of operation in the tilt direction.
- the amount of operation in the tilt direction becomes zero at time T3 and the bucket control lever 42 is placed in the neutral state
- the operator immediately starts the operation in the dump direction.
- the operator reaches the maximum amount of operation in the dumping direction at time T4
- the operator immediately decreases the amount of operation in the dumping direction.
- the allowable maximum flow rate of hydraulic oil supplied to the bucket cylinder 35 is restricted.
- the target flow rate of hydraulic oil determined by the input of the bucket control lever 42 increases to the maximum allowable flow rate in the tilt direction.
- the target flow rate becomes larger than the maximum permissible flow rate, but even in that case, the command flow rate is limited to the maximum permissible flow rate.
- the command flow rate is made equal to the target flow rate after time T12.
- the target flow rate increases to the maximum allowable flow rate in the dump direction. From time T13 to time T14, the target flow rate is greater than the maximum permissible flow rate, but even in that case the command flow rate is limited to the maximum permissible flow rate.
- the amplitude A of the command flow rate shown in FIG. 11 is smaller than the amplitude of the target flow rate calculated based on the operation of the bucket control lever 42 by the operator.
- the maximum speed of the bucket 31 can be reduced by restricting the maximum allowable flow rate of the hydraulic oil and limiting the amplitude of the operation that vibrates the bucket 31 . This makes it possible to limit the swinging motion of the bucket at a high speed.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Operation Control Of Excavators (AREA)
Abstract
Description
<ホイールローダ1の全体構成>
実施形態においては、作業機械の一例としてホイールローダ1について説明する。図1は、実施形態に基づく作業機械の一例としてのホイールローダ1の側面図である。
図2は、実施形態に従うホイールローダ1を含む全体システムの構成を示す概略ブロック図である。ホイールローダ1は、作業機コントローラ10と、エンジン11と、Power Take Off(PTO:動力取出装置)12とを備えている。
図4は、作業機コントローラ10の機能構成を示すブロック図である。図4に示されるように、作業機コントローラ10は、バケットシリンダ目標流量計算部51と、バケット振り周波数制限部52と、屈曲角度読取り部53と、EPC電流決定部54とを主に備えている。
図5は、従来のバケット振り動作の制御を示す図である。図5の横軸はアーティキュレート角度を示し、図5の縦軸はオペレータがバケット操作レバー42を操作する周波数(1秒あたりの操作回数)を示す。
上述した実施形態の特徴的な構成および作用効果についてまとめて説明すると、以下の通りである。
実施形態の説明では、チルト方向の作動油の流量増加および流量減少、ならびに、ダンプ方向の作動油の流量増加および流量減少、の4通りの場合に、流量の変化率を等しく制限する例を示したが、流量の変化率の制限を異ならせてもよい。たとえば、チルト方向およびダンプ方向に作動油の流量が増加するときの流量の変化率の許容値を、チルト方向およびダンプ方向に作動油の流量が減少するときの流量の変化率の許容値よりも、小さくしてもよい。チルト方向およびダンプ方向の作動油の流量増加のときには流量の変化率を制限し、一方、チルト方向およびダンプ方向の作動油の流量減少のときには流量の変化率に制限を設けずにオペレータによるバケット操作レバー42の操作通りに作動油の流量を減少させてもよい。
第1実施形態では、オペレータがバケット操作レバー42を操作してバケット振り動作をする例について説明した。バケット振り動作によるバケット31からの付着物の除去を容易にするため、自動的にバケット振り動作をする制御がある。オペレータの、自動バケット振りを実行する操作が入力されると、作業機コントローラ10は、「予め決められた自動バケット振り周波数」でバケット振り動作が実現するようにバケットシリンダ35に対する指令流量を決定し、指令流量に基づきEPC電流を決定する。これにより作業機コントローラ10は、オペレータによるバケット操作レバー42の操作なしに、自動的にバケット振り動作を実現する。
第1実施形態では、アーティキュレート角度が大きいときに早いバケット振り動作を実質的にできなくする制御の一例として、バケットシリンダ35へ供給される作動油の流量の変化率を制限する例を説明した。第3実施形態では、別の形態として、バケットシリンダ35へ供給される作動油の最大流量を制限する例について説明する。
Claims (12)
- リアフレームと、
前記リアフレームに対し屈曲動作可能に接続するフロントフレームと、
前記フロントフレームに対し動作可能なバケットと、
前記バケットを駆動するアクチュエータと、
前記リアフレームと前記フロントフレームとの相対位置を検出するセンサと、
前記アクチュエータを制御するコントローラとを備え、
前記コントローラは、前記センサの検出結果の入力を受け付け、前記検出結果に基づいて前記アクチュエータの動作を制御する、作業機械の制御システム。 - 前記コントローラは、前記検出結果に基づいて、前記アクチュエータの動作に制限を設ける、請求項1に記載の作業機械の制御システム。
- 前記コントローラは、前記バケットを振動させる動作の単位時間あたりの許容回数に制限を設ける、請求項2に記載の作業機械の制御システム。
- 前記コントローラは、前記リアフレームに対して前記フロントフレームが屈曲する角度が大きいほど、前記バケットを振動させる動作の単位時間あたりの許容回数を小さくする、請求項3に記載の作業機械の制御システム。
- 前記アクチュエータは、作動油の供給を受けて前記バケットを駆動するバケットシリンダを含み、
前記コントローラは、前記バケットシリンダへ供給される作動油の流量の変化率を制限する、請求項2から請求項4のいずれか1項に記載の作業機械の制御システム。 - 前記コントローラは、前記リアフレームに対して前記フロントフレームが屈曲する角度が大きいほど、前記バケットシリンダへ供給される作動油の流量の変化率を小さくする、請求項5に記載の作業機械の制御システム。
- 前記コントローラは、前記バケットを振動させる動作の振幅に制限を設ける、請求項2に記載の作業機械の制御システム。
- 前記バケットを動作させるために手動で操作可能な操作装置をさらに備え、
前記コントローラは、前記操作装置の操作内容に対する前記アクチュエータの動作に制限を設ける、請求項2から請求項7のいずれか1項に記載の作業機械の制御システム。 - 前記アクチュエータは、作動油の供給を受けて前記バケットを駆動するバケットシリンダを含み、
前記コントローラは、前記操作内容に基づいて計算される作動油の流量よりも、前記バケットシリンダへ供給される作動油の流量を小さくする、請求項8に記載の作業機械の制御システム。 - 前記作業機械は、前記リアフレームまたは前記フロントフレームに搭載され、オペレータが搭乗するキャブを備え、
前記操作装置は前記キャブ内に配置される、請求項8または請求項9に記載の作業機械の制御システム。 - 前記作業機械は、前記リアフレームに取り付けられた後輪と、前記フロントフレームに取り付けられた前輪とを有する、請求項1から請求項10のいずれか1項に記載の作業機械の制御システム。
- リアフレームと、前記リアフレームに対し屈曲動作可能に接続するフロントフレームと、前記フロントフレームに対し動作可能なバケットと、前記バケットを駆動するアクチュエータと、前記リアフレームと前記フロントフレームとの相対位置を検出するセンサと、を備える作業機械の制御方法であって、
前記センサの検出結果の入力を受け付けることと、
前記検出結果に基づいて前記アクチュエータの動作を制御することと、を備える、作業機械の制御方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22883254.9A EP4403711A1 (en) | 2021-10-22 | 2022-09-09 | Control system and control method for work machine |
| CN202280069979.0A CN118215770A (zh) | 2021-10-22 | 2022-09-09 | 作业机械的控制系统以及控制方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021172935A JP2023062818A (ja) | 2021-10-22 | 2021-10-22 | 作業機械の制御システムおよび制御方法 |
| JP2021-172935 | 2021-10-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023067943A1 true WO2023067943A1 (ja) | 2023-04-27 |
Family
ID=86059064
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/033888 WO2023067943A1 (ja) | 2021-10-22 | 2022-09-09 | 作業機械の制御システムおよび制御方法 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP4403711A1 (ja) |
| JP (1) | JP2023062818A (ja) |
| CN (1) | CN118215770A (ja) |
| WO (1) | WO2023067943A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008101345A (ja) * | 2006-10-17 | 2008-05-01 | Hitachi Constr Mach Co Ltd | アーティキュレート式作業機 |
| JP2012086619A (ja) * | 2010-10-18 | 2012-05-10 | Caterpillar Japan Ltd | アーティキュレート車両における小旋回制御装置 |
| JP2019049150A (ja) * | 2017-09-11 | 2019-03-28 | 日立建機株式会社 | 作業車両 |
| US10597845B2 (en) | 2017-09-27 | 2020-03-24 | Deere & Company | Implement vibration system and method |
| JP2021155980A (ja) * | 2020-03-26 | 2021-10-07 | 株式会社小松製作所 | 作業機械および作業機械の制御方法 |
-
2021
- 2021-10-22 JP JP2021172935A patent/JP2023062818A/ja active Pending
-
2022
- 2022-09-09 WO PCT/JP2022/033888 patent/WO2023067943A1/ja active Application Filing
- 2022-09-09 EP EP22883254.9A patent/EP4403711A1/en active Pending
- 2022-09-09 CN CN202280069979.0A patent/CN118215770A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008101345A (ja) * | 2006-10-17 | 2008-05-01 | Hitachi Constr Mach Co Ltd | アーティキュレート式作業機 |
| JP2012086619A (ja) * | 2010-10-18 | 2012-05-10 | Caterpillar Japan Ltd | アーティキュレート車両における小旋回制御装置 |
| JP2019049150A (ja) * | 2017-09-11 | 2019-03-28 | 日立建機株式会社 | 作業車両 |
| US10597845B2 (en) | 2017-09-27 | 2020-03-24 | Deere & Company | Implement vibration system and method |
| JP2021155980A (ja) * | 2020-03-26 | 2021-10-07 | 株式会社小松製作所 | 作業機械および作業機械の制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023062818A (ja) | 2023-05-09 |
| EP4403711A1 (en) | 2024-07-24 |
| CN118215770A (zh) | 2024-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4223893B2 (ja) | 作業車両の作業機用油圧ポンプの制御方法と制御装置 | |
| US20180100290A1 (en) | Material Handling Machine with Bucket Shake Control System and Method | |
| JP7217691B2 (ja) | 建設機械 | |
| JPWO2019130451A1 (ja) | 作業機械 | |
| WO2017061220A1 (ja) | 建設機械 | |
| CN111542665A (zh) | 作业机、作业机的控制方法、程序及其记录介质 | |
| WO2022190650A1 (ja) | 建設機械 | |
| KR102649042B1 (ko) | 작업 차량 | |
| WO2023067943A1 (ja) | 作業機械の制御システムおよび制御方法 | |
| US9809948B2 (en) | Work vehicle control method, work vehicle control device, and work vehicle | |
| EP4034716B1 (en) | System and methods for cycle time management | |
| JP6928161B2 (ja) | 作業車両及び作業車両の制御方法 | |
| WO2022070954A1 (ja) | 建設機械 | |
| JP2010112019A (ja) | 作業車両 | |
| JP2015148928A (ja) | 建設機械 | |
| JP7253478B2 (ja) | 作業機械 | |
| JP4478538B2 (ja) | 作業車両の作業機用油圧ポンプの容量制御方法及び容量制御装置 | |
| JP3461281B2 (ja) | 建設機械の作業機制御装置 | |
| JP7171536B2 (ja) | 作業機 | |
| JP3634601B2 (ja) | 旋回式建設機械の油圧ポンプ制御装置 | |
| JP6791827B2 (ja) | 作業車両及び作業車両の制御方法 | |
| JP6101974B2 (ja) | 建設機械 | |
| JP7200082B2 (ja) | 作業機 | |
| JP7546123B2 (ja) | バルブシステム | |
| JP3180933B2 (ja) | ホイール式作業車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22883254 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022883254 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280069979.0 Country of ref document: CN |
|
| ENP | Entry into the national phase |
Ref document number: 2022883254 Country of ref document: EP Effective date: 20240416 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |