WO2023054444A1 - 電池パック及び電気機器 - Google Patents
電池パック及び電気機器 Download PDFInfo
- Publication number
- WO2023054444A1 WO2023054444A1 PCT/JP2022/036103 JP2022036103W WO2023054444A1 WO 2023054444 A1 WO2023054444 A1 WO 2023054444A1 JP 2022036103 W JP2022036103 W JP 2022036103W WO 2023054444 A1 WO2023054444 A1 WO 2023054444A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- battery pack
- main body
- control unit
- electrical device
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images


















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
- B25F5/02—Construction of casings, bodies or handles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M10/00—Secondary cells; Manufacture thereof
- H01M10/42—Methods or arrangements for servicing or maintenance of secondary cells or secondary half-cells
- H01M10/48—Accumulators combined with arrangements for measuring, testing or indicating the condition of cells, e.g. the level or density of the electrolyte
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
Definitions
- the present invention relates to battery packs and electrical equipment.
- Patent Literature 1 discloses an adapter that is mounted between a battery pack and an electric device main body and that includes an inclination sensor, a control section, and a signal output terminal.
- the controller of the adapter when the tilt sensor detects that the tilt detected by the tilt sensor is larger than a predetermined value, the controller of the adapter outputs a stop signal from the signal output terminal to the main body of the electric device, and the battery pack is stopped. is configured to cut off the power supply from the main body of the electrical equipment.
- Patent Document 2 describes a configuration in which a sensor is provided in a battery pack to suppress an increase in the size of an electrical device.
- a battery pack is provided with an acceleration sensor and a control section, the control section on the battery pack side detects the impact by the impact tool main body, and the control section turns off the switching element provided on the battery pack side.
- an impact tool configured to cut power from the battery pack to the impact tool.
- Patent Document 2 cuts off the power supply to the main body inside the battery pack based on the judgment of the battery pack. Therefore, when connected to an impact tool that generates a large impact force, the impact can be detected, but if it is connected to an impact tool that generates a small impact force, the impact cannot be detected. Conceivable. In order to increase versatility, it is considered useful to perform control according to device information output from an electrical device main body such as an impact tool to be connected. In addition, since the battery pack is used by being connected to various electrical equipment main bodies, convenience can be improved by providing a sensor capable of detecting information other than impact detection.
- the present invention has been made in view of the above background. It is to provide an electric device using it. Another object of the present invention is to provide a battery pack with improved convenience and an electric device using the same. Another object of the present invention is to provide a microcomputer and one or more sensors on the battery pack side and perform communication between the battery side microcomputer and the main body side microcomputer so that the battery pack can support the control of the main body of the electrical equipment. It is to provide a battery pack and electric equipment that are
- a battery pack attachable to an electric device main body, the sensor unit configured to collect and output physical information caused by external factors of the battery pack; and a device-side control unit connected to the unit and receiving device information output from the device-side control unit.
- the battery pack side control unit controls the electric device main body according to the device information and the physical information.
- the physical information caused by external factors includes information regarding the position, orientation, or acceleration of the battery pack.
- the battery pack side controller is configured to be communicable with the device side controller.
- the battery pack has a plurality of metal connection terminals that enable electrical connection with the electrical equipment main body, and uses part of the connection terminals to communicate with the electrical equipment main body.
- the battery pack side control unit is configured to be able to change the operating conditions of the electrical device main body according to the physical information, and is configured to be able to change the operating conditions of the electrical device main body according to the connected electrical device main body.
- the electric equipment includes a battery pack mounting portion to which a battery pack can be attached, an electric equipment main body having a load portion driven by the battery pack, and an electric equipment including the battery pack.
- a device-side control section configured to collect and output physical information caused by external factors of the battery pack, and a sensor section connected to the sensor section. and a battery pack-side control section to which device information output from the device-side control section is input.
- the battery pack-side control unit sends a signal for controlling the electrical device main unit using the output detected by the sensor unit to the electrical device main unit.
- the sensor unit is configured not to perform detection.
- the battery pack outputs a signal for prohibiting driving of the electrical equipment body when the information output from the sensor section does not match the identification information.
- This identification information includes the permitted operation range based on the mounting direction of the battery pack.
- the battery pack is configured to output a signal that prohibits driving of the electric device main body when the information output from the sensor section is out of the permitted operation range.
- the battery pack includes a sensor unit configured to collect and output physical information caused by external factors of the battery pack, and a mounting direction of the battery pack connected to the sensor unit and output from the device-side control unit. and a battery pack side control unit to which identification information for identifying the is input.
- the battery pack side control section controls the electrical equipment main body based on the identification information and the physical information.
- the battery pack and electric equipment which enable the optimal control according to the connected apparatus main body can be provided, suppressing the enlargement of an electric equipment. Also, it is possible to provide a battery pack with improved convenience and an electric device using the same. Furthermore, the battery pack side control section can generate a signal for controlling the electric device main body according to the physical information detected by the sensor. It is possible to realize an electrical device that includes such a battery pack, a battery pack attachment portion to which the battery pack can be attached, and an electrical device main body having a load portion driven by the battery pack.
- FIG. 1 is a left side view of an electrical device 201 according to an embodiment of the invention
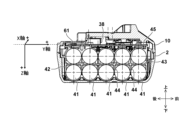
- FIG. FIG. 2 is a longitudinal sectional view of the battery pack 1 of FIG. 1
- 2 is a circuit diagram of battery pack 1 and electric device 201 shown in FIG. 1.
- FIG. FIG. 3 is a state transition diagram showing operation procedures of the battery pack 1 and the electric device 201 according to the embodiment.
- FIG. 5 is a flow chart showing the control procedure of the control unit 50 of the battery pack 1 in the process leading to steps 101 to 117 in FIG. 4
- FIG. FIG. 4 is a diagram for explaining a method of controlling an electrical device 201 using the battery pack 1 according to the embodiment of the invention (No. 1); FIG.
- FIG. 2 is a diagram for explaining a method of controlling an electrical device 201 using the battery pack 1 according to the embodiment of the invention (No. 2);
- FIG. 3 is a diagram for explaining a method of controlling an electric device 201 using the battery pack 1 according to the embodiment of the invention (No. 3);
- FIG. 11 is a diagram for explaining a method of controlling an electric device 201 using a battery pack 1A according to a second embodiment of the invention (No. 1);
- FIG. 10 is a diagram for explaining a method of controlling an electric device 201 using a battery pack 1A according to a second embodiment of the invention (No. 2);
- FIG. 10A is a side view of a battery pack 1B and an electric device 301 according to a third embodiment of the present invention, where (A) shows the state at the start of drilling work, and (B) shows the state at the end of drilling work; . It is a figure which shows the battery pack 1B shown in FIG. 11, (A) is a left side view, (B) is a rear view. FIG. 10A is a left side view and FIG. 10B is a rear view showing a battery pack 1C according to a fourth embodiment of the present invention; Fig.
- FIG. 10 is a vertical cross-sectional view for explaining a state in which an electric device main body 401 according to a fifth embodiment of the present invention is controlled, (A) showing a state where the hammer is at the initial position, and (B) showing the hammer at the cam end. This indicates a state in which a vibration different from that during a normal impact operation is generated in the entire equipment due to collision with the
- FIG. 11 is a diagram for explaining a method of controlling an electric device 501 according to a tenth embodiment using the battery pack 1 according to the first embodiment of the present invention (No. 1);
- FIG. 20 is a diagram for explaining a method of controlling an electric device 501 according to a tenth embodiment using the battery pack 1 according to the first embodiment of the present invention (No.
- FIG. 14 is a diagram for explaining a method of controlling an electric device 501 according to a tenth embodiment using the battery pack 1 according to the first embodiment of the present invention (No. 3);
- FIG. 11 is a circuit diagram of the battery pack 1 of the first embodiment of the present invention and an electric device 201A according to the eleventh embodiment;
- FIG. 6 is a flow chart showing a control procedure of the control unit 50 of the battery pack 1 when an electric equipment main body 201A (circular saw C) according to the eleventh embodiment of the present invention is added to the flow chart of FIG. 5.
- FIG. 14 is a diagram for explaining a method of controlling an electric device 501 according to a tenth embodiment using the battery pack 1 according to the first embodiment of the present invention (No. 3);
- FIG. 11 is a circuit diagram of the battery pack 1 of the first embodiment of the present invention and an electric device 201A according to the eleventh embodiment;
- FIG. 6 is a flow chart showing a control procedure of the control unit 50 of the battery pack 1 when
- FIG. 1 is a side view of an electrical device 201 according to an embodiment of the invention.
- an example of the electric device 201 an example of a circular saw, which is an electric power tool, is shown.
- the circular saw (201) is a disk-shaped working device having a plurality of spire-shaped blades formed on the outer peripheral side.
- a cutting tool is shown.
- a motor 204 is arranged substantially in the center of a synthetic resin main housing 202 .
- the motor 204 has a rotating shaft (not visible in the drawing) extending horizontally in the left-right direction, and the output of the rotating shaft is decelerated and transmitted to the drive shaft of the saw blade 205 .
- the bottom surface of the main housing 202 is provided with a base 210 that serves as a sliding surface with the material 290 to be cut.
- a longitudinally extending elongated opening (not visible in the drawing) is formed in substantially the center of the base 210, and a part of the saw blade 205 protrudes downward from the opening.
- a saw blade 205 projecting downward from the base 210 can cut a material to be cut (mating material) 290 such as wood.
- a protective cover is provided around the lower side of the saw blade 205 to prevent the blade of the saw blade 205 from being exposed when the saw blade 205 is not pressed against an object to be cut. is provided.
- a handle portion 203 is formed above the main housing 202 to be gripped by an operator, and the handle portion 203 is provided with a trigger lever 206a for turning on the rotation of the motor 204 .
- the power source of the electric device 201 one that uses a commercial power source and one that uses a battery pack are widely known, but in this embodiment, the detachable battery pack 1 is used. Therefore, a battery pack mounting portion 202a for mounting the battery pack 1 is provided in the rear portion of the main housing 202, and the battery pack 1 can be mounted on the battery pack mounting portion 202a. The battery pack 1 is attached to the battery pack attachment portion 202a so as to be slid from the rear side to the front side.
- a latch mechanism including a latch button 16 is operated to fix the battery pack 1 to the main housing 202 so that the battery pack 1 does not fall off, and the battery pack 1 is attached to the main body of the electric device 201. retained.
- the term "main body (of an electrical device)" refers to a portion of the electrical device to which no battery pack is attached (a portion of the electrical device other than the battery pack).
- the main body of the electric device 201 may be referred to as the electric device main body 201, and the electric device main body 201 and the battery pack 1 may be collectively referred to as the electric device.
- the operator presses the base 210 and the saw blade 205 against the object to be cut, and operates the trigger lever 206a while gripping the handle portion 203 to cut the object in a straight line.
- the cutting direction is the front direction of the electric device 201 .
- FIG. 2 is a longitudinal sectional view of the battery pack 1.
- FIG. The internal space formed by the upper case 10 and the lower case 2 accommodates ten cylindrical battery cells 41 .
- Ten battery cells 41 are fixed by separators 42 in a state in which five cells are stacked vertically in two stages.
- the type, size, and number of the battery cells 41 are arbitrary.
- a lithium ion battery cell called 18650 size which has a diameter of 18 mm and a length of 65 mm and can be charged and discharged multiple times, is used.
- five battery cell groups connected in series are connected in parallel to output DC with a rated voltage of 18V.
- Vertically adjacent battery cells 41 are partitioned by flat upper and lower partition walls 43, and front and rear adjacent battery cells 41 are partitioned by flat front and rear partition walls 44 so that they are adjacent to each other.
- the battery cells 41 are held so as not to contact each other.
- a circuit board 45 is fixed on the upper side of the separator 42 .
- the circuit board 45 is a printed circuit board (PCB) on which various electronic elements such as a battery protection IC, a microcomputer, a storage memory, a PTC thermistor, a resistor, a capacitor, a fuse, and a light emitting diode are mounted.
- PCB printed circuit board
- a plurality of metal connection terminals (only the LD terminal 38 is visible here) are fixed to the circuit board 45 to fit with the connection terminals on the electrical equipment main body 201 side.
- a circuit pattern (not shown) is formed on the circuit board 45 to electrically connect the positive electrode side output and the negative electrode side output of the battery cell 41 to the connection terminal group.
- a sensor 61 according to this embodiment is further mounted on the circuit board 45 .
- the sensor 61 is one of the sensors called a triaxial acceleration sensor, and is intended to measure acceleration, and measures three-dimensional inertial motion (translational motion in three orthogonal directions of X, Y, and Z shown in the figure). To detect.
- the sensor 61 corresponds to the "sensor section" of the present invention.
- FIG. 3 is a circuit diagram of the battery pack 1 and the electrical equipment body 201.
- the battery pack 1 is provided with sensing sensors 61 to 69 such as acceleration sensors, and is configured to control the main body of the electric device 201 according to physical information obtained from the sensors.
- the battery pack 1 is electrically connected to the electrical equipment main body 201 via a plurality of connection terminals (32, 34, 36-38, etc.).
- the positive terminal 32 and the negative terminal 37 are power supply terminals connected to the positive and negative terminals of the battery cell 41 , and are connected to the positive input terminal 232 and the negative input terminal 237 of the electrical equipment body 201 .
- the positive side output of the battery cell 41 is connected to the positive terminal 32 and the negative side is connected to the negative terminal 37 .
- the battery pack 1 is further provided with a positive terminal for charging (so-called C+ terminal) as a terminal for electric power, but it is not shown here.
- the battery pack 1 is provided with at least one or more sensing sensors 61 to 69 either built-in or externally.
- the conventional battery pack 1 is provided with a sensor for measuring voltage supplied from the battery cell 41, a sensor for measuring current, and a sensor for measuring temperature.
- the sensors 61 to 69 of this embodiment do not detect internal factors (battery cells 41) of the battery pack 1, but physical, optical, electrical, and magnetic factors originating from the outside of the battery pack 1. are provided to detect any one or more of the following: Examples of the sensors 61 to 69 include an acceleration sensor, a distance sensor (ranging sensor), an optical sensor, a human sensor, a position sensor, a sound sensor, an image sensor, an illuminance sensor, and a magnetic sensor, to which the battery pack 1 is exposed.
- the number of these sensors 61 to 69 to be provided in the battery pack 1 is arbitrary, and one or more may be provided.
- it may be attached outside the case of the battery pack 1 instead of being provided inside the case. In that case, it is preferable to provide a connector for connection at a position accessible from the outside of the battery pack 1 in order to perform electrical wiring between the sensor 62 and the control unit 50 .
- Each of the sensors 61 to 69 is for the purpose of sensing physical information, and is arranged at a position where the purpose can be achieved and which can be housed in the battery pack 1 or can be attached.
- the control unit 50 manages charging and discharging of the battery cell 41 and processes physical information acquired by the sensors 61-69.
- the controller 50 corresponds to the "battery pack side controller" of the present invention.
- the control power supply circuit 51 converts the power of the battery cell 41 into a constant voltage of 3.3 V or 5 V and outputs the constant voltage to the control unit 50 .
- the control unit 50 is mounted on the circuit board 45 (see FIG. 2) and includes a microcomputer, a ROM for storing processing programs and control data, a RAM for temporarily storing data, a timer, and the like. be done. Outputs input from the sensors 61 to 69 are A/D converted by the microcomputer of the control unit 50, and sampling, noise removal processing, and other necessary processing are performed.
- the control unit 50 is further provided with a wireless communication circuit 55 .
- the wireless communication circuit 55 is a circuit for close proximity wireless communication such as Bluetooth (registered trademark).
- the radio communication circuit 55 is provided with an antenna 56 to enable communication within a distance of several tens of meters.
- the microcomputer of the control unit 50 processes the signals input from the sensors 61 to 69 and controls the operation of the main unit of the electrical equipment 201 to which the battery pack 1 is attached.
- the control unit 50 is configured to be able to communicate with the control unit 50 on the electric device main unit 201 side, and has three terminals for communication. is used.
- One is a second signal terminal (T terminal) 34, and this terminal transmits a signal that serves as identification information of the battery pack 1 to the electrical equipment main body 201. It is also used as a communication terminal for transmitting information on the battery pack 1 side via the circuit 53 .
- Another first signal terminal (LS terminal) 36 is a signal terminal for transmitting the output of a thermistor (temperature sensing element) (not shown) provided for measuring the temperature of the battery cell 41. It is also used as a communication terminal for receiving information from the electrical equipment body 201 via the circuit 53 .
- the tool main body communication circuit 53 is a circuit for performing two-way wired communication with the battery communication circuit 260 of the electrical equipment main body 201 using the conventionally used signal terminals of the LS terminal 36 and the T terminal 34 .
- a third signal terminal (LD terminal) 38 is a signal terminal for outputting an abnormal stop signal for protecting the battery cell 41 by the control section 50 via the control signal output circuit 52 .
- the electric device main body 201 is controlled by the control section 250 .
- the controller 250 corresponds to the "apparatus-side controller" of the present invention.
- a control power supply circuit 255 is provided to operate the control unit 250 .
- the control power supply circuit 255 is a power supply for generating a constant low voltage (eg, 3.3 V or 5 V) from direct current supplied to the positive input terminal 232 and the negative input terminal 237 .
- a constant low voltage eg, 3.3 V or 5 V
- the self-holding circuit 259 continuously outputs a signal to the control power supply circuit 255 to keep the control power supply circuit 255 in the ON state.
- the control signal input circuit 261 is a circuit that determines a signal transmitted from the battery pack 1 side via the third signal terminal (LD terminal) 238 and transmits the signal to the control section 250 .
- the battery communication circuit 260 is a circuit for performing two-way communication with the control section 50 of the battery pack 1 using the first signal terminal (LS terminal) 236 and the second signal terminal (T terminal) 234 .
- the control unit 250 includes a microcomputer for outputting drive signals based on processing programs and data, a ROM for storing processing programs and control data, a RAM for temporarily storing data, a timer, and the like.
- the motor 204 is a three-phase brushless DC motor driven by an inverter circuit 252 .
- the motor 204 is of a so-called inner rotor type, and includes a rotor 204a including a plurality of sets (two sets in this embodiment) of permanent magnets (magnets) including N and S poles, and a star. It has a stator 204b consisting of three-phase stator windings U, V, W that are connected.
- the trigger switch 206 When the trigger switch 206 is turned on, the signals from the three Hall elements 265 are detected by the rotational position detection circuit 266, and the controller 250, which receives the detection signals, controls the direction of current flow to the stator windings U, V, and W. and time are calculated, and the motor 204 is controlled to rotate at a predetermined number of revolutions.
- the inverter circuit 252 is composed of six switching elements (Q1 to Q6) such as FETs connected in a three-phase bridge configuration. Each gate of switching elements Q1-Q6 is connected to inverter control circuit 251, and each drain or source of switching elements Q1-Q6 is connected to star-connected stator windings U, V, W. FIG. As described above, the microcomputer included in the control unit 250 changes the DC power input to the inverter circuit 252 into three phases (U phase, V phase and W-phase) supplied to the stator 204b as voltages Vu, Vv, and Vw.
- the PWM signal is supplied to either one of the positive power supply side switching elements Q1 to Q3 or the negative power supply side switching elements Q4 to Q6 of the inverter circuit 252, and the switching elements Q1 to Q3 or the switching elements Q4 to Q6 are switched at high speed. Controls the power supplied to each stator winding U, V, W from DC by In this embodiment, since the PWM signal is supplied to the switching elements Q4 to Q6 on the negative power supply side, the power supplied to each stator winding U, V, W is adjusted by controlling the pulse width of the PWM signal. can be used to control the rotation speed of the motor 204 .
- a current value supplied to the motor 204 is measured by a current detection circuit 256 using a shunt resistor 253 and fed back to the control section 250 .
- the voltage value applied to the inverter circuit 252 is monitored by the controller 250 by measuring the voltage across the capacitor 254 for smoothing by the voltage detection circuit 257 .
- the lighting LED 270 is a light-emitting device that illuminates the area where the tool is to be worked.
- the microcomputer of the control unit 250 detects that the operator has operated a lighting button (not shown) provided on the electrical equipment main body 201, and follows the instruction. The controller 250 turns on or off the lighting LED 270 .
- control unit 250 sets a predetermined lighting mode (blinking, display color change, etc.) in accordance with a communication signal from the microcomputer (control unit 50) of the battery pack 1 so that the electric device main body 201 can be identified by the operator. state.
- the operation mode switch 267 is a switch for setting the tightening strength of the impact tool or the like, the tightening mode, and the like.
- the operation mode set by the operation mode switch 267 is displayed by the corresponding mode display LED 268 which operation mode is selected.
- the transition diagram of FIG. 4 starts when the battery pack 1 is attached to the electrical equipment main body 201 (step 101), the main switch of the electrical equipment main body 201 is turned on, and the microcomputer of the control unit 250 is activated (step 121). ).
- the microcomputer of the control unit 250 is activated when the trigger lever 206a is first pulled to start the operation.
- the control unit 250 on the side of the electrical equipment main body 201 transmits an "information request signal" for requesting transmission of information acquired by the sensors 61 to 69 to the battery pack 1 (steps 122, 102).
- the information to be used does not have to be all sensor information, and the required sensors 61-69 may be selected. Further, not only the "information request signal” but also "equipment body information (equipment information)" for identifying the type of the electrical equipment body 201 is transmitted. This transmission is performed via the first signal terminal 36 and the first signal terminal 236 .
- the "equipment main body information” includes the model name of the electric equipment main body, information on the electric equipment main body necessary for utilizing sensor information, parameters necessary for controlling the electric equipment main body, and the like. If the main body of the electrical equipment to which the battery pack 1 is attached is an old model in which the information from the sensors 61 to 69 cannot be used from the battery pack 1, the information request signal cannot be sent to the battery pack 1 side. Therefore, the subsequent steps are skipped, and without using the sensor information from the battery pack 1, the main body of the electrical equipment operates in the same manner as the conventional one.
- the control unit 50 of the battery pack 1 When the control unit 50 of the battery pack 1 receives the "information request signal" and the "device body information", the control unit 50 of the battery pack 1 controls the electrical device body 201 based on the "device body information”.
- a “reference value” is set (step 111).
- the reference value is a value indicating the correct posture of the main body during work determined for each model.
- the reference value is used as a comparison value when detecting an abnormal posture in a machine such as a circular saw whose main body posture during work is determined depending on the model.
- the work start posture is used as the reference value. set.
- the operator When the operator wants to use the current state as a reference in detecting the inclination of the electric device main body 201, the operator performs a reference value offset operation from the main body side of the electric device 201 (step 123).
- the reference value offset operation the operator determines the posture of the main body of the electric device 201 to position the main body of the electric device 201 at the reference position, and operates a specific button provided on the main body of the electric device 201. (press). This is because it is not possible to determine which position to use as a reference unless there is an instruction from the operator, such as button operation, on the main body side of the electrical device 201 .
- a dedicated or dual-purpose lamp is lit to indicate that the offset operation has been performed. Good luck. In this way, the orientation of the electrical equipment main body can be reset by designating the offset operation button each time a drilling operation is performed, for example, by an electric drill.
- Control unit 250 of electrical equipment main body 201 that has detected the button operation for setting the reference value transmits an "offset instruction signal" to battery pack 1 (step 124). This transmission is performed via the first signal terminal 36 and the first signal terminal 236 (step 103). It should be noted that the offset operation of the reference value of the electrical equipment main body 201 may not be necessary in some cases. In that case, the operator does not operate a specific button, so steps 124 and 103 are skipped.
- the control unit 50 of the battery pack 1 that has received the "offset instruction signal" collects various physical information from the outputs of the sensors 61 to 69 (step 113), and the physical information values obtained at that time are Subsequent detection of physical information using the sensors 61 to 69 is performed as a reference value (step 114).
- This reference value is stored in a storage device (not shown) included in the control unit 50 of the battery pack 1 and maintained until the next reference value is updated.
- the operator starts the operation of the electrical device main body 201 .
- the motor 204 is rotated by operating the trigger lever 206a while pressing the saw blade or tip tool against the mating material.
- the controller 50 of the battery pack 1 collects physical information about the main body of the electrical device 201 and the surroundings of the battery pack 1 (step 115). Examples of information collected here include position information of the battery pack 1 , attitude information of the battery pack 1 , and acceleration information of the battery pack 1 .
- This “physical information” is detected not due to the battery pack 1 (based on internal factors), but due to external factors such as the operation of the electrical device main body 201 .
- the information is also the information for the electrical equipment main body 201 to which the battery pack 1 is attached.
- the detected physical information of the battery pack 1 is stored in a storage device (not shown) included in the controller 50 of the battery pack 1 (step 116). The reason why the physical information is stored is that, since the sensor value always fluctuates, the information immediately before the determination is temporarily stored when performing the determination, and the determination is performed after processing as necessary.
- the control unit 50 of the battery pack 1 calculates the state and operating conditions of the electric device main body 201 according to the detected physical information, the device main body information of the electric device main body 201, and the set reference value setting (step 117). ). This state and operating conditions will be described later with reference to FIGS. 6 to 11.
- FIG. The calculated operating conditions of the electrical equipment body 201 are sent to the control unit 250 of the electrical equipment body 201 via the second signal terminals 34 and 234 (step 104).
- the control section 250 of the electrical equipment main body 201 that has received the "operating condition" controls the output of the load section according to the operating condition (steps 125, 126).
- the control unit 250 of the electric device main body 201 acquires information (operating conditions) determined from sensor information detected by the battery pack 1, and performs control according to the information. After that, steps 112 to 117 and steps 123 to 126 are repeated to repeat a plurality of operations. After that, the main power supply (main switch) of the electrical equipment main body 201 is turned off, or in the case of an electrical equipment main body without a main power supply (main switch), the battery pack 1 is removed from the main body of the electrical equipment main body 201. Then (step 105), the operation of the control unit 250 of the electrical equipment body 201 is stopped (step 127).
- control of the flow chart of FIG. 5 is software-controlled by the microcomputer included in the control unit 50 executing a computer program.
- the control unit 50 determines whether or not the battery pack 1 is attached to the electrical equipment main body 201, that is, the tool (the electrical equipment main body 201) such as a circular saw (step 131). If it is not installed in step 131 , it waits until it is installed. (Step 132).
- the control unit 50 of the battery pack 1 transmits the output signal of the requested sensor, which is an existing sensor among the sensors 61 to 69, to the electric device main body 201 side.
- the controller 50 of the battery pack 1 uses the received device body information to determine the model of the attached electrical device body 201 (step 133).
- the electrical equipment main body 201 is the first circular saw (circular saw A)
- the threshold for determining the posture of the electrical equipment main body using the sensor value is set to a predetermined value A (step 134)
- Data from the sensors 61 to 69 are acquired after the work is started (step 136).
- step 136 it is not necessary to obtain the outputs of all the sensors 61-69 that are set, and it is sufficient to use only the outputs from the sensors required for the desired control.
- step 133 if the electrical equipment main body 201 is the second circular saw (circular saw B), the threshold for determining the posture of the electrical equipment main body using the sensor value is set to a predetermined value B. (Step 135), the data of the sensors 61 to 69 are acquired after the start of work (Step 136).
- the controller 50 of the battery pack 1 uses the acquired sensor information to determine whether or not the posture of the electrical equipment main body 201 is normal (step 137). For example, in the case of the circular saw A or B, it is determined using the output of the acceleration sensor whether or not the posture is within an appropriate range for working. An example of this determination will be described later with reference to FIGS. 6 to 8.
- FIG. Here, if the posture of the circular saw A or B is normal, an output permission signal is sent to the electrical equipment main body 201 (the circular saw A or B) (step 139), and if the posture is not normal, An output stop signal is transmitted to the electrical equipment body 201 (circular saw A or B) (step 138).
- the output enable signal and the output stop signal can be sent by any signal, but the signal from the LD terminal conventionally provided in the battery pack 1, that is, the LD signal for stopping the operation of the electrical equipment main body 201 in the event of overdischarging. can be used. If the output permission signal has been transmitted (step 139), the user can perform work using the electrical device body 201 (step 140).
- step 133 if the electric device main body 201 to which the battery pack 1 is attached is neither the circular saw A nor the circular saw B, the process returns to step 131 assuming that it is another device main body (tool main body).
- the process returns to step 131 assuming that it is another device main body (tool main body).
- the sent device main body information is used.
- the type of sensor information to be used and its threshold value may be set, and the control when the output value of the sensor reaches the threshold value may be individually set for each connected electric device main body 201 .
- sensor information required for each electrical equipment main body 201 is stored in a table format in a storage device (not shown) included in the control unit 50 of the battery pack 1, and is stored in steps 132 and 133. Can be configured to branch by reference. In this manner, if the reference information for each model of the electrical equipment main body 210 is stored in advance in the storage device of the control unit 50 of the battery pack 1, information from the many sensors 61 to 69 provided in the battery pack 1 can be used to It is possible to control various electrical equipment main bodies 201 .
- the control unit 50 of the battery pack 1 continues to monitor the sensor information and When the trigger switch 206 (trigger lever 206a) is pulled at a certain time, the electric device main body (tool main body) operates. 206a) can be controlled so that it does not operate even if it is pulled.
- FIG. 6A and 6B show a case where the posture of the main body of the electric device 210 is horizontal, (A) is a left side view of the circular saw (the electric device 201), and (B) is the state of (A). This is the attitude of the battery pack 1 when .
- the directions of the Y-axis and Z-axis indicated by (B) are the directions based on the battery pack 1, and indicate the directions of the acceleration sensor mounted on the battery pack.
- the battery pack 1 Since the battery pack 1 is horizontally attached to the electric device main body 201, when the electric device main body 201 is in the horizontal state as shown in (A), the battery pack 1 is also in the horizontal state.
- the circular saw has a base 210 for sliding on a material to be cut, and is configured so that the amount of protrusion of the saw blade 205 from below the base 210 (so-called depth of cut) can be changed. . That is, it is configured such that the angle of the circular saw body with respect to the base 210 can be changed.
- FIG. 6A shows a state in which the saw blade 205 protrudes from the base 210 by the maximum amount.
- the circular saw body is in a state within the permitted operation range 280 (example of identification information) in FIG. 6(C).
- the mounting direction of the battery pack 1 with respect to the circular saw body is the front-rear direction (Y-axis direction).
- the information on the electrical device main body 201 includes the mounting direction of the battery pack 1 .
- This type of circular saw corresponds to circular saw A in FIG.
- the reference 0 degrees in FIG. 6(A) corresponds to the threshold value A in step 134 in FIG.
- the permitted operation range 280 and the threshold values A and B are examples of identification information.
- the unit 50 permits the operation of the electrical equipment body 201, that is, executes the procedure of step 139 in FIG.
- whether or not it is "within the operation permitted range 280" can be determined by the Y component and the Z component in the output of the acceleration sensor 61, and -0.87g ⁇ Y ⁇ 0.5g and Z>0. Determine in some cases.
- the dotted line on the horizontal axis is the absolute Y-axis direction (one direction passing through the horizontal plane), and the dotted line on the vertical axis is the absolute Z-axis direction (one direction passing through the extension plane).
- FIG. 7 shows a state in which the front side of the main body of the electric device 210 is oriented upward by about 45 degrees, (A) is a left side view of the circular saw (the electric device main body 201), and (B) ) is the attitude of the battery pack 1 in the state of (A).
- the battery pack 1 in this posture is in the same posture as shown in (B) together with the electric device main body 201. Therefore, the acceleration sensor 61 is affected by the gravitational acceleration. is 0.64 g in the Z-axis direction and 0.64 g in the Y-axis direction as shown in (C). Since this is outside the range of the aforementioned determination conditions, the control unit 50 of the battery pack 1 determines that the operation of the electrical equipment body 201 should be prohibited (corresponding to step 137 in FIG. 5), and 201 (see step 138 in FIG. 5).
- FIG. 8 shows a state in which the posture of the main body of the electrical device 210 is reversed and rotated about 150 degrees from the state of (A).
- This state corresponds to a working state in which an operator uses an electric circular saw to cut tree branches or cut a ceiling tree from below.
- FIG. 8A is a left side view of the circular saw (electric device main body 201), and
- FIG. 8B is the posture of the battery pack 1 in the state of (A).
- the battery pack 1 in the posture shown in FIG. 8A is affected by gravitational acceleration, and the detection value of the acceleration sensor 61 in the Z-axis direction is ⁇ 0.87 g and in the Y-axis direction is 0.5 g.
- the detected value in the Z-axis direction is a negative value because the sensor 61 is upside down. Since this is outside the range of the aforementioned determination conditions, the control unit 50 of the battery pack 1 determines that the operation of the electrical equipment body 201 should be prohibited (corresponding to step 137 in FIG. 5), and 201 (see step 138 in FIG. 5).
- the controller 50 of the battery pack 1 determines the posture of the circular saw, and stops the operation of the electrical device main body 201 when the electrical device main body 201 falls into an inappropriate posture. I explained the control to let With this control, it is possible to effectively prohibit the work of operating the circular saw in an inappropriate posture using the battery pack 1 with the sensor.
- the detection results in the X-axis direction are not referred to for the sake of simplification of the description, but the detection results of all the three axes of the acceleration sensor 61, the X-axis, the Y-axis, and the Z-axis. You may perform advanced control by further attitude determination with reference to .
- the output of any one of the other sensors 62 to 69 may also be used to control the operation of the electrical equipment main body 201.
- the main body of the electric device 201 in FIG. 9 is the same as the electric device main body 201 shown in FIGS. 1 and 6 to 8, and (A) is a left side view and (B) is a front view.
- the attached battery pack 1A is different from the battery pack 1 of FIG. 2 in that a distance sensor 63 is added to the bottom surface of the lower case 2 .
- the distance sensor 63 measures whether an object exists below the bottom surface of the lower case 2 based on the distance to the object.
- the distance sensor 63 can detect the set angle of the base 210 by measuring the distance to the base 210 and detect the depth of cut and the angle of inclination of the saw blade 205 .
- the distance sensor 63 corresponds to the "sensor section" of the present invention.
- the sensor information acquired by the control unit 50 is transmitted to the control unit 250 of the electrical equipment body 201 via the second signal terminals 34 and 234 .
- This sensor information is physical information that changes with the attitude of the electrical device main body 201 (changes due to “external factors” when viewed from the battery pack 1 ).
- the microcomputer of the control unit 250 grasps the distance between the sensor mounting position and the main body of the electrical device 201 (here, the distance to the base 210), and performs control according to the depth of cut and the angle of inclination.
- Optimize As an example of control optimization, when the depth of cut is shallow or the slope is not applied, light load work is assumed. Since heavy load work is assumed when the motor is being applied, the motor rotation speed may be decreased to increase the torque.
- the electrical equipment main body 201 is provided with a segment display device or a dot matrix display device (for example, a liquid crystal display), the depth of cut and the angle of inclination may be digitally displayed there. .
- FIG. 9A shows the state when the rear end side of the base 210 is closest to the main housing 202 (battery pack 1) (position where the cutting depth is maximum).
- the distance from sensor 63 to base 210 is S1 .
- FIG. 10A shows a case where the base 210 is fixed so that the rear end of the base 210 is separated from the main body (main housing 202). In this case, the distance from the distance sensor 63 to the base 210 is S2 . ) is set shallow.
- FIG. 11A is a side view of a battery pack 1B and an electrical equipment main body 301 according to the third embodiment of the present invention, showing a state at the start of drilling work.
- This electrical equipment main body 301 is shown as an example of a driver drill.
- a brushless DC motor (not visible in the figure) is housed inside a housing 302, and power transmission parts (not visible in the figure) such as a speed reduction mechanism for reducing the rotation force of the motor and a clutch mechanism. not) to rotate the tip tool 310 .
- the tip tool 310 shown in FIG. 11 is a drill bit.
- a chuck (tip tool holder) 308 is provided at the tip of the output shaft (not visible in the figure) to hold the tip tool 310 .
- a handle portion 303 is formed so as to be connected to the portion of the housing 302 that accommodates the motor, and the battery pack 1B is attached to the distant end of the handle portion 303 (the end on the side opposite to the motor).
- a trigger lever 306 is provided on a portion of the handle portion 303 .
- a normal/reverse switching lever 307 for switching the rotation direction of the motor is provided near the trigger lever 306 . The user grips the handle portion 303 with one hand, presses the distal end portion 310a of the tip tool 310 against the mating member 330 so as to be positioned, and pulls the trigger lever 306 with the index finger or the like to adjust the trigger depression amount (operation amount). adjust and control the speed of a motor (not shown).
- the configuration of battery pack 1B is the same as that of battery pack 1 of the first embodiment, except for the types of sensors 61 to 69 (see FIG. 3) mounted.
- a distance sensor 64 (64a, 64b) is provided on the housing of the battery pack 1B.
- the distance sensor 64 uses light (laser) to measure the distance to a distant object without contact, and includes a light-emitting portion 64a and a light-receiving portion 64b.
- the distance sensor 64 corresponds to the "sensor section" of the present invention. In this embodiment, the distance from the electric device main body 301 to the counterpart material (punched material) 330 is not measured, but the distance from the battery pack 1B to the counterpart material (punched material) 330 is measured.
- This distance is physical information that changes with the attitude of the electrical device main body 301 (changes due to “external factors” when viewed from the battery pack 1 ).
- the light emitted from the light emitting portion 64a of the battery pack 1B is reflected by the mating member 330 such as wood and returns to the battery pack 1 side, and is received by the light receiving portion 64b.
- the control unit 50 of the battery pack 1B analyzes and calculates the reflected light, calculates the distance D1 from the light emitting unit 64a to the mating member 330, and outputs the distance D1 to the control unit 250 of the electrical device main body 301.
- the distance sensor 64 By using the distance sensor 64 in this manner, the drilling depth S3 can be detected and the drilling can be automatically stopped at an arbitrary depth.
- the drilling depth S3 is set and stored in the microcomputer of the control unit 50 on the battery pack 1 side before each drilling operation, but the setting method is arbitrary.
- the controller 50 on the battery pack 1B side measures the distance D2 to the mating member and stores the distance D2 in the temporary storage device.
- the control unit 50 continuously monitors the distance to the counterpart material during the drilling operation, and when the distance D 2 becomes the distance D 1 - drilling depth S 3 , electricity is applied via the third signal terminals 38 and 238.
- a stop signal is transmitted to the controller 250 on the device main body 301 side.
- FIG. 12A and 12B are diagrams showing the battery pack 1B shown in FIG. 11, where (A) is a left side view and (B) is a rear view.
- the battery pack 1B has a configuration in which a distance sensor 64 (a light emitting portion 64a, a light receiving portion 64b, and a distance measuring portion (not shown)) is provided as one of the sensors 61-69.
- the distance sensor 64 is provided in the lower case 2 near the center in the left and right direction.
- the battery pack 1B As described above, by changing a conventional battery pack without a sensor to the battery pack 1B according to the present embodiment, it is possible to drill holes in the mating member 330 to an accurate depth.
- the above example illustrates a drilling operation, it can be similarly applied when the tip tool 310 is a driver bit. That is, when the screw is tightened, the motor is automatically stopped when the position of the screw head matches the surface of the mating member 330 according to the length of the screw. can be tightened to
- a distance sensor using light has been described, but other forms of distance sensors, such as a distance sensor using ultrasonic waves, or other distance sensors can be similarly applied. can.
- FIGS. 13A and 13B are diagrams showing a battery pack 1C according to a fourth embodiment of the present invention, where (A) is a left side view and (B) is a rear view.
- a human sensor 65 is provided as one of the sensors 61-69.
- the human sensor 65 is used to move the electrical equipment main body 301 and the like by detecting ambient temperature changes using an infrared sensor.
- the human sensor 65 corresponds to the "sensor section" of the present invention.
- the human sensor 65 is provided on the left side of the display section 80 of the upper case. By providing the human sensor 65 at this position, it is possible to detect whether or not the operator has gripped the handle portion 303 of the electrical equipment main body 301 .
- the value detected by the human sensor 65 is physical information that changes not due to the battery pack 1 but due to an external factor such as the operator.
- the control unit 50 of the battery pack 1C can control to activate the control unit 250 on the electric device main body 301 side.
- This distance is physical information that changes with the attitude of the electrical device main body 301 (changes due to “external factors” when viewed from the battery pack 1 ).
- an activation circuit is provided on the electrical equipment main body 301 side to activate the control unit 250 when a start instruction signal is transmitted to the electrical equipment main body 301 side via the second signal terminals 34 and 234. It is necessary to set it in
- a sensor other than the human sensor in or near the inner area of the display section 80 of the battery pack 1C.
- a fingerprint sensor may be provided as a sensor unit instead of or in addition to the human sensor 65 so that the operator can detect the fingerprint sensor (see FIG. 1) of the battery pack 1C before starting work. (not shown) is touched to perform fingerprint authentication, the control unit 50 of the battery pack 1C can control to activate the control unit 250 on the electric device main body 301 side.
- FIG. 14 illustrates an electrical equipment body 401 according to a fifth embodiment of the invention.
- 14A and 14B are vertical cross-sectional views of an electric device main body 401 controlled using a battery pack 1 having sensors 61 to 69, (A) showing a state in which the hammer is in the initial position (forward position), and (B). indicates a state in which the hammer collides with the cam end and causes vibrations throughout the equipment that are different from those during normal striking operations.
- illustration of the battery pack 1 is omitted here, the battery pack 1 with the same acceleration sensor 61 as in the first embodiment is used.
- the acceleration sensor 61 corresponds to the "sensor section" of the present invention.
- the hammer 440 is always biased forward by a hammer spring (not shown), and is positioned forward by a cam mechanism using a cam ball (not shown) and a cam groove 452 when stationary. At this position, the striking claw of the hammer 440 overlaps the struck claw of the anvil 460 in the direction of the axis A1.
- the spindle 430 is rotationally driven, the rotation is transmitted to the hammer 440 via the cam mechanism, and the striking pawl of the hammer 440 engages the pawl to be struck of the anvil 460 .
- the hammer 440 and the anvil 460 rotate synchronously (continuous rotation) for the time being from the start of fastening of the electrical equipment main body 401 .
- the hammer 440 compresses the hammer spring (not shown) toward the rear. (Motor 404 side) gradually retreats. Normally, the rear end of the hammer 440 does not reach the stopper position due to this retraction. may collide with stopper 456 .
- the acceleration sensor 61 mounted on the battery pack 1 detects a large acceleration in the horizontal direction (X direction, Y direction). This acceleration is not generated by an internal factor of the battery pack 1, but is physical information generated by an external factor caused by the operation of the outside of the battery pack 1 (electrical device main body 401).
- the control unit 50 of the battery pack 1 acquires the acceleration detected by the acceleration sensor 61, and immediately stops the motor 404 of the electric device main body 401 when a large vibration exceeding the threshold value is detected, or stops the motor 404. The work continues until the trigger lever 406 is released while the output is greatly reduced.
- the abnormal vibration is detected by the acceleration sensor 61 on the battery pack 1 side, and the control unit 50 on the battery pack 1 side determines whether or not it is necessary to change the control of the electrical equipment main body 401 based on the detection result.
- the determination result is transmitted to the control section 250 of the electrical equipment main body 401 via the third signal terminals 38 and 238 .
- the control unit 250 of the electric device main body 401 receives the communication information and performs necessary control, for example, immediately stopping the motor 404 or reducing the output of the motor 404 by a certain amount (eg, 40%).
- the output of the acceleration sensor 61 on the battery pack 1 side is used to control the output of the motor in a device such as an impact tool or a hammer drill that is likely to vibrate. It is possible to perform control to lower the
- a position sensor is provided as a sensor unit provided in the battery pack, and by specifying the position (place) of the battery pack, the position of the electrical equipment connected thereto is detected.
- a position sensor a GPS (Global Positioning System) sensor is provided on the circuit board 45 (see FIG. 2) of the battery pack 1E (not shown). This GPS sensor performs three-dimensional positioning of a radio wave receiving device on the earth based on the arrival times of radio waves of time signals emitted from a plurality of satellites.
- the control unit (microcomputer) of the battery pack 1E determines whether or not the battery pack 1E is attached to the electrical equipment main body, and determines whether or not the battery pack 1E is attached to the electrical equipment main body When the battery pack 1E is attached to the device main body and the microcomputer of the electrical device main body is activated, the battery pack 1E can detect its position information.
- the position of the electrical equipment main body to which the battery pack 1E (not shown) is attached can be detected, it becomes possible to set the allowable operating range (area) of the electrical equipment main body. For example, by registering the location information of the planned work site, the operation of the electrical equipment main body is permitted within the planned work site, and if the microcomputer of the battery pack 1E determines that the work site is not the scheduled work site, the electrical equipment It may be controlled to stop the operation of the main body (for example, stop the motor). For this control, information about the permitted work range is registered in advance in the storage device of the electrical equipment main body. When the battery pack 1E is attached to the electrical equipment main body, the microcomputer of the battery pack 1E obtains information on the permitted work range from the microcomputer of the electrical equipment main body, and controls using the information.
- a control unit (microcomputer) of an electric device main body detects the position (place) when the battery pack 1E is attached to the electric device main body and the microcomputer of the electric device main body is activated. By storing it in the storage device, it becomes possible to record the work location of the electrical equipment main body along with the time.
- a "sound sensor” is provided as a sensor unit provided in the battery pack 1F (not shown) to detect sounds coming from outside the battery pack (physical information due to external factors). controls the operation of the electrical equipment connected to the battery pack.
- the sound sensor is one of the sensors (first sensor) for collecting sounds (sound waves) coming from the outside of the battery pack 1, and detects, for example, the magnitude of compressional waves propagating in air (medium). do.
- the sound sensor it is preferable to use an electrodynamic, electrostatic, or piezoelectric microphone in one to four directions viewed from the horizontal plane of the battery pack.
- control unit (microcomputer) of the battery pack 1F monitors the output of the sound sensor and stops the motor when the surrounding sound (noise) becomes louder during operation or standby of the electric device. It is possible to control Furthermore, the microcomputer in the battery pack 1F detects the sound (operation sound) emitted from the main body of the electrical equipment by monitoring the output of the sound sensor, determines whether the bolt is tightened, and controls the motor to stop. It is possible.
- an "image sensor for example, a camera)
- the battery pack uses the image information to help control the main body of the electrical equipment.
- the control unit (microcomputer) of the battery pack acquires the image information of the surrounding area and uses known image recognition technology to identify the work target area such as a circular saw. ) can be controlled to stop the motor of the main body of the electrical equipment when a person enters.
- an "illuminance sensor” is provided as a sensor unit provided in a battery pack 1H (not shown) to provide information on the brightness of the outside of the battery pack (for example, illuminance, which is a physical sensor due to external factors).
- the battery pack can use the illuminance image information to help control the main body of the electrical equipment.
- the surrounding brightness is monitored, and depending on the brightness of the site, the brightness of the main body of the electric equipment such as a light, the brightness of the display device of the main body of the electric equipment (for example, You can adjust the brightness of the LCD backlight.
- the settings such as the number of revolutions of the electrical equipment main body may be controlled to change when the illuminance sensor portion provided in the battery pack 1H (not shown) is covered with a hand.
- Embodiment 10 is a control method for an electrical device main body 501 having a shape that is detachable by sliding the battery pack 1 in the vertical direction (in the direction of the Y axis and in the vertical direction) with respect to the electrical device main body 501. Description will be made with reference to FIGS. 15 to 17.
- FIG. An example of a circular saw body is shown as an electric device main body 501.
- the electric device main body 501 corresponds to the electric device main body 201 shown in FIG.
- the configuration is the same as that of the electrical equipment main body 201 .
- the main body (circular saw main body) of the electric device 501 shown in FIG. 15 is horizontal, and the angle formed by the base 510 with respect to the horizontal plane is 0 degrees.
- FIG. 15A is a left side view of the circular saw (electrical device 501)
- FIG. 15B is the posture of the battery pack 1 when the electrical device 501 is in the state of (A) (reference 0 degree).
- the battery pack 1 can be attached to the battery pack attachment portion 502a by moving it relative to the electrical device main body 501 from top to bottom. For example, when the battery pack 1 is positioned horizontally in the electrical equipment main body 501 and is in a state as shown in (A), the Y-axis direction of the battery pack 1 is in a vertical state.
- the electrical equipment main body 501 includes a base 510 placed on and sliding on the object to be cut, a saw blade 505 protruding from an opening provided in the base 510 to the bottom surface of the base, a motor 504 for rotating the saw blade, and a motor 504 .
- the handle portion 503 has a handle portion 503 provided on the top of the housing that accommodates the .
- the handle portion 503 is provided with a trigger lever 506 for turning on the rotation of the motor 504 .
- the configuration of the electrical equipment main body 501 is the same as that of the electrical equipment main body 201 shown in FIG.
- the control unit 50 of the battery pack 1 permits the operation of the electric device main body 501, that is, executes the procedure of step 139 in FIG.
- whether or not it is within the "permissible operation range 580" can be determined by the Y component and the Z component in the output of the acceleration sensor 61 provided in the battery pack 1, and -0.87g ⁇ Z ⁇ 0.5g and Y ⁇ 0, it is determined to be "operable”.
- the state of FIG. 15 (reference 0 degrees) corresponds to the threshold value B of step 134 of FIG.
- the dotted line on the horizontal axis is the absolute Z-axis direction (one direction passing through the horizontal plane), and the dotted line on the vertical axis is the absolute Y-axis direction (one direction passing through the extension plane).
- FIG. 16 shows a state in which the front side of the main body of the electric device 501 is turned upward by about 45 degrees from the state shown in FIG. 15(A). It is a left side view, and (B) is a posture of the battery pack 1 in the state of (A). 15, the battery pack 1 in this posture assumes the posture shown in FIG.
- the detected values in the Y-axis direction and the Z-axis direction are ⁇ 0.64 g in the Y-axis direction and 0.64 g in the Z-axis direction, as shown in (C). Since this falls outside the above-described determination condition, that is, the operation permission range 580, the control unit 50 of the battery pack 1 determines that the operation of the electric device body 501 should be prohibited (step 137 in FIG. 5). ), and sends an output stop signal to the electrical equipment main body 501 (see step 138 in FIG. 5).
- FIG. 17 shows a state in which the posture of the main body of the electrical device 501 is reversed and rotated about 150 degrees from the state shown in FIG. 15(A).
- This state corresponds to a working state in which an operator uses a circular saw (electric device main body 501) to cut branches of a tree or cut a ceiling tree from below.
- FIG. 17A is a left side view of the circular saw (electric device main body 501)
- FIG. 17B is the posture of the battery pack 1 in the state of (A).
- the battery pack 1 in the posture shown in FIG. 17A is affected by gravitational acceleration, and the detection value of the acceleration sensor 61 in the Y-axis direction is 0.87 g, and the detection value in the Z-axis direction is 0.5 g. .
- the detected value in the Y-axis direction is a positive value because the sensor 61 is upside down. Since this falls outside the above-described determination condition, that is, the operation permission range of the operation permission range 580, the control unit 50 of the battery pack 1 determines that the operation of the electric device main body 501 should be prohibited (see FIG. 5). (corresponding to step 137), and an output stop signal is sent to the electrical equipment main body 501 (see step 138 in FIG. 5).
- Circular saw B (electrical equipment main body 501) having a configuration in which the battery pack 1 is vertically attached to and detached from the circular saw main body is similar to circular saw A (electrical equipment main body 201) in FIGS.
- the controller 50 of the battery pack 1 can set a threshold value (simplified motion permission) based on the direction in which the battery pack 1 is mounted, determine the posture, and determine whether or not the motion is possible. Therefore, it is possible to effectively prohibit the operation of operating the circular saw B (electrical device main body 501) in an inappropriate posture using the sensor-equipped battery pack 1 .
- the battery pack 1 is attached to and detached from the circular saw body in the front-rear direction (horizontal direction), and in FIGS.
- the direction in which the battery pack 1 is attached to the circular saw body (electrical device main body 201, 501) can be set arbitrarily.
- the attachment/detachment directions of the plurality of battery packs 1 may be the same, or the attachment/detachment directions of the plurality of battery packs 1 may be different.
- the controller 50 of the battery pack 1 can determine the attitude based on the device main body information and the sensor information of the electrical device main bodies 201 and 501 .
- the electric device main bodies 201 and 501 transmit their own device main body information including the attachment/detachment direction and the number of the battery packs 1 to the control unit 50 of the battery pack 1 .
- the control unit 50 determines the attitude of the electrical equipment main bodies 201 and 501 based on the attitude information detected by the sensor and the information on the attachment/detachment direction of the battery pack 1, and controls the electrical equipment main bodies 201 and 501 according to the determination result. good.
- FIG. 18 shows a circuit diagram of a battery pack and an electric device main body 201A in a configuration in which a plurality of battery packs 1 can be connected to the electric device main body 501 at the same time.
- the main housing 202 of the electrical equipment body (for example, circular saw C) 201A is provided with a plurality of (here, two) battery pack mounting portions, and the positive input terminal 232, the negative input terminal 237, the first to the first A plurality of sets of terminals equivalent to the third signal terminals 234, 236, 238 are provided according to the number of attachable battery packs 1 (here, two).
- FIG. 18 shows only one set of the positive input terminal 232 and the negative input terminal 237, this means that a plurality of battery packs are connected in parallel with each other. are provided in multiple sets (two sets). Battery communication circuits 260a and 260b corresponding to each battery pack 1 are also provided. Although there is only one control signal input circuit 261, control signals from a plurality of battery packs 1 are input.
- the second battery pack (2) has the same configuration as the first battery pack (1). A number sign is attached.
- the two battery packs (1) and (2) perform mutual wireless communication, one battery pack (1) collects information on the other battery pack (2), and one battery pack (1) ) may be configured to communicate with the electrical equipment main body 201A as a representative. In this case, it is not necessary to provide two battery communication circuits such as 260a and 260b, but only one.
- FIG. 19 is a flow chart showing the control procedure of the battery pack 1 when the electric device main body 201A (circular saw C) shown in FIG. 18 is added to the judgment element in step 133 of the flow chart of FIG.
- the control from steps 131 to 140 is the same as the procedure shown in FIG.
- the controller 50 of the battery pack 1 determines the model of the attached electrical device main body 201 using the received device main body information.
- the electric equipment body 201 is the first circular saw (circular saw A) and the second circular saw (circular saw B)
- the process is the same as in FIG. move on.
- the electric device main body 201A is the third circular saw (circular saw C) to which a plurality of battery packs can be attached at the same time, the process proceeds to step 141 .
- the control unit 50 of the battery pack 1 connected to the electrical device main body 201 refers to the information on the battery pack mounting portion among the main body information acquired at step 132 .
- the battery pack 1 is connected to one of the battery pack mounting portions (for example, two) of the battery pack mounting portions (the first)
- the information including the mounting direction of the first battery pack mounting portion Based on this, the threshold for determining the posture of the electrical equipment main body 201A is set to a predetermined value C (step 142).
- the threshold value for posture determination of the electric device main body 201A is set to a predetermined value D based on information including the mounting direction of the battery pack mounting portion No. 2. (step 143).
- the control unit 50 of the battery pack 1 determines the posture of the electrical equipment main body 201A based on the predetermined value C or D, and outputs a control signal to the electrical equipment main body (steps 136 to 139).
- the controllers 50 of all battery packs 1 connected to the electrical equipment body 201A execute these processes. Further, when a plurality of battery packs 1 are connected, the posture of the electrical equipment main body 201A is determined based on the information of one of the battery packs 1, and one of the battery packs 1 sends a control signal to the electrical equipment main body 201A. may be output. Further, in step 126 of FIG. 4, if the operating conditions received from the plurality of battery packs 1 do not match, for example, if one of the battery packs 1 is out of the operating permission range, the control unit 250 of the electrical equipment body 201A Driving may be prohibited (stopped).
- the electric device main body 201A to which a plurality of battery packs 1 can be connected at the same time it can be driven if at least one battery pack 1 is connected (in the case of a configuration in which a plurality of battery packs 1 are connected in parallel), or when a plurality of battery packs 1 are connected in parallel. It is conceivable that the device cannot be driven unless all battery packs 1 are connected (in the case of a configuration in which a plurality of battery packs 1 are connected in series).
- the control unit 250 of the electrical equipment main body 201A is configured to determine whether or not the required number of battery packs 1 are connected based on the information from the battery packs 1 received via the battery communication circuits 260a and 260b. ing.
- the data may be transmitted and received between each battery pack 1 and the electrical device main body 201A.
- the control unit 50 of the normal battery pack 1 transmits a signal indicating abnormality to the electrical equipment main body 201A.
- the control unit 50 of the battery pack 1 having abnormal data may transmit a signal indicating the abnormality to the electrical equipment body 201A.
- the control section on the side of the electrical equipment main body 201A may determine a data abnormality and prohibit (stop) the driving of the electrical equipment main body 201A.
- the present invention is not limited to the above-described embodiments, and various modifications can be made without departing from the scope of the invention.
- various sensors are provided on the battery pack side, and the sensor output is processed by a control unit (microcomputer) on the battery pack side, It can be configured to transmit the processed information to the control unit on the side of the main body of the electrical equipment attached by priority or wireless communication, and to control the operation of the main body of the electrical equipment.
- the types of sensors are not limited to the above examples.
- the control according to the physical information may include stopping or decelerating the motor, changing the output, and notifying with a buzzer, LED, or the like.
- Trigger lever 307... Normal/reverse switching lever, 310... Tip Tool 310a Tip Part 330 Mating Material 401 Electric Device Body 404 Motor 406 Trigger Lever 430 Spindle 440 Hammer 452 Cam Groove 456 Stopper 460 Anvil 501 Electrical device (main body) 502a Battery pack mounting part 503 Handle part 504 Motor 505 Saw blade 506 Trigger switch 510 Base A1 Rotation axis of motor
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Electrochemistry (AREA)
- General Chemical & Material Sciences (AREA)
- Mechanical Engineering (AREA)
- Battery Mounting, Suspending (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023551582A JP7758966B2 (ja) | 2021-09-29 | 2022-09-28 | 電池パック及び電動工具 |
| US18/575,278 US12420400B2 (en) | 2021-09-29 | 2022-09-28 | Battery pack and electrical device |
| DE112022004663.5T DE112022004663T5 (de) | 2021-09-29 | 2022-09-28 | Batterie-paket und elektrisches gerät |
| CN202280047752.6A CN117651627A (zh) | 2021-09-29 | 2022-09-28 | 电池组及电气设备 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-158764 | 2021-09-29 | ||
| JP2021158764 | 2021-09-29 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023054444A1 true WO2023054444A1 (ja) | 2023-04-06 |
Family
ID=85782794
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/036103 Ceased WO2023054444A1 (ja) | 2021-09-29 | 2022-09-28 | 電池パック及び電気機器 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12420400B2 (https=) |
| JP (1) | JP7758966B2 (https=) |
| CN (1) | CN117651627A (https=) |
| DE (1) | DE112022004663T5 (https=) |
| WO (1) | WO2023054444A1 (https=) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005224909A (ja) * | 2004-02-13 | 2005-08-25 | Hitachi Koki Co Ltd | 電池パック及び電動工具 |
| JP2015008080A (ja) * | 2013-06-25 | 2015-01-15 | 株式会社マキタ | バッテリパック |
| US20150187198A1 (en) * | 2013-12-27 | 2015-07-02 | Aaron G. Silverberg | Orientation Measurement And Guidance Of Manually Positioned Objects |
| WO2020260079A1 (en) * | 2019-06-25 | 2020-12-30 | Hilti Aktiengesellschaft | Sensor to detect a mechanical stress on the battery pack |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR930011132B1 (ko) * | 1991-11-01 | 1993-11-24 | 삼성전자 주식회사 | 배터리의 쾌속충전 제어회로 |
| GB2457173A (en) * | 2008-02-11 | 2009-08-12 | Milwaukee Electric Tool Corp | A Power Tool |
| DE102009046789A1 (de) * | 2009-11-17 | 2011-05-19 | Robert Bosch Gmbh | Handwerkzeugmaschinenvorrichtung |
| JP5817126B2 (ja) * | 2011-01-21 | 2015-11-18 | マックス株式会社 | 駆動工具 |
| JP5597156B2 (ja) * | 2011-03-29 | 2014-10-01 | アズビル株式会社 | フィールド機器 |
| US10639018B2 (en) | 2017-06-27 | 2020-05-05 | Ethicon Llc | Battery pack with integrated circuit providing sleep mode to battery pack and associated surgical instrument |
| WO2019035338A1 (ja) * | 2017-08-14 | 2019-02-21 | 工機ホールディングス株式会社 | 電池パック及び電気機器 |
| JP2019042850A (ja) | 2017-08-31 | 2019-03-22 | 工機ホールディングス株式会社 | アダプタ |
| JP7382190B2 (ja) | 2019-09-26 | 2023-11-16 | 株式会社マキタ | 回転工具 |
| JP2021120176A (ja) * | 2020-01-31 | 2021-08-19 | 工機ホールディングス株式会社 | 通信装置及びそれを用いた電気機器システム |
-
2022
- 2022-09-28 US US18/575,278 patent/US12420400B2/en active Active
- 2022-09-28 CN CN202280047752.6A patent/CN117651627A/zh active Pending
- 2022-09-28 JP JP2023551582A patent/JP7758966B2/ja active Active
- 2022-09-28 WO PCT/JP2022/036103 patent/WO2023054444A1/ja not_active Ceased
- 2022-09-28 DE DE112022004663.5T patent/DE112022004663T5/de active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005224909A (ja) * | 2004-02-13 | 2005-08-25 | Hitachi Koki Co Ltd | 電池パック及び電動工具 |
| JP2015008080A (ja) * | 2013-06-25 | 2015-01-15 | 株式会社マキタ | バッテリパック |
| US20150187198A1 (en) * | 2013-12-27 | 2015-07-02 | Aaron G. Silverberg | Orientation Measurement And Guidance Of Manually Positioned Objects |
| WO2020260079A1 (en) * | 2019-06-25 | 2020-12-30 | Hilti Aktiengesellschaft | Sensor to detect a mechanical stress on the battery pack |
Also Published As
| Publication number | Publication date |
|---|---|
| CN117651627A (zh) | 2024-03-05 |
| DE112022004663T5 (de) | 2024-07-18 |
| US12420400B2 (en) | 2025-09-23 |
| US20240326222A1 (en) | 2024-10-03 |
| JP7758966B2 (ja) | 2025-10-23 |
| JPWO2023054444A1 (https=) | 2023-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7496562B2 (ja) | 工具システム | |
| CN107796349B (zh) | 电动工具的深度和角度传感器附件 | |
| EP3484662B1 (en) | Powered ratcheting torque wrench | |
| CN112518679B (zh) | 工具系统 | |
| US8763720B2 (en) | Interactive tools | |
| US11917319B2 (en) | Tool system, tool management method, and program | |
| CN112654463B (zh) | 电动工具及处理装置 | |
| JP7336669B2 (ja) | 工具システム、工具、作業対象特定システム、作業対象特定方法及びプログラム | |
| JP2019042850A (ja) | アダプタ | |
| JP2011020230A (ja) | 携帯用工具 | |
| US12240093B2 (en) | Tool system, tool management method, and program | |
| JP2019188599A (ja) | 制御装置及びそれを用いた作業管理システム | |
| JP6796796B2 (ja) | 電動工具 | |
| JP2022097703A (ja) | 電動工具 | |
| WO2023054444A1 (ja) | 電池パック及び電気機器 | |
| CN114829073A (zh) | 用于与以蓄电池运行的加工设备的至少一个操作者交互的方法以及用于执行该方法的系统 | |
| US20240387888A1 (en) | Battery pack and electrical device | |
| JP6998534B2 (ja) | 電動工具 | |
| JPWO2023054445A5 (https=) | ||
| JPWO2023054444A5 (https=) | ||
| JP7462279B2 (ja) | 作業管理システム | |
| JP2025007407A (ja) | 判定システム、判定方法及びプログラム | |
| JP2025054874A (ja) | 工具システム、工具、モード切替方法及びプログラム | |
| JP2020082241A (ja) | 電動工具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22876310 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18575278 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280047752.6 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023551582 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112022004663 Country of ref document: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22876310 Country of ref document: EP Kind code of ref document: A1 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 18575278 Country of ref document: US |