WO2023047477A1 - ステントおよびステントデリバリーシステム - Google Patents
ステントおよびステントデリバリーシステム Download PDFInfo
- Publication number
- WO2023047477A1 WO2023047477A1 PCT/JP2021/034669 JP2021034669W WO2023047477A1 WO 2023047477 A1 WO2023047477 A1 WO 2023047477A1 JP 2021034669 W JP2021034669 W JP 2021034669W WO 2023047477 A1 WO2023047477 A1 WO 2023047477A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- engaging portion
- stent
- engaging
- valley
- axial direction
- Prior art date
Links
- 238000009941 weaving Methods 0.000 claims abstract description 6
- 238000005452 bending Methods 0.000 description 11
- 238000011282 treatment Methods 0.000 description 10
- 238000003780 insertion Methods 0.000 description 7
- 230000037431 insertion Effects 0.000 description 7
- 208000031481 Pathologic Constriction Diseases 0.000 description 6
- 208000037804 stenosis Diseases 0.000 description 6
- 230000036262 stenosis Effects 0.000 description 6
- 238000000034 method Methods 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 210000000013 bile duct Anatomy 0.000 description 4
- 230000000052 comparative effect Effects 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 239000011347 resin Substances 0.000 description 4
- 229920005989 resin Polymers 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 239000000470 constituent Substances 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 210000001124 body fluid Anatomy 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 210000002249 digestive system Anatomy 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 210000001198 duodenum Anatomy 0.000 description 1
- 238000012277 endoscopic treatment Methods 0.000 description 1
- 210000003238 esophagus Anatomy 0.000 description 1
- 238000002594 fluoroscopy Methods 0.000 description 1
- 210000001035 gastrointestinal tract Anatomy 0.000 description 1
- 210000002429 large intestine Anatomy 0.000 description 1
- 210000004185 liver Anatomy 0.000 description 1
- 210000000813 small intestine Anatomy 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/82—Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/86—Stents in a form characterised by the wire-like elements; Stents in the form characterised by a net-like or mesh-like structure
- A61F2/90—Stents in a form characterised by the wire-like elements; Stents in the form characterised by a net-like or mesh-like structure characterised by a net-like or mesh-like structure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/95—Instruments specially adapted for placement or removal of stents or stent-grafts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/95—Instruments specially adapted for placement or removal of stents or stent-grafts
- A61F2/962—Instruments specially adapted for placement or removal of stents or stent-grafts having an outer sleeve
- A61F2/966—Instruments specially adapted for placement or removal of stents or stent-grafts having an outer sleeve with relative longitudinal movement between outer sleeve and prosthesis, e.g. using a push rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2220/00—Fixations or connections for prostheses classified in groups A61F2/00 - A61F2/26 or A61F2/82 or A61F9/00 or A61F11/00 or subgroups thereof
- A61F2220/0008—Fixation appliances for connecting prostheses to the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2230/00—Geometry of prostheses classified in groups A61F2/00 - A61F2/26 or A61F2/82 or A61F9/00 or A61F11/00 or subgroups thereof
- A61F2230/0063—Three-dimensional shapes
- A61F2230/0069—Three-dimensional shapes cylindrical
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2240/00—Manufacturing or designing of prostheses classified in groups A61F2/00 - A61F2/26 or A61F2/82 or A61F9/00 or A61F11/00 or subgroups thereof
- A61F2240/001—Designing or manufacturing processes
- A61F2240/002—Designing or making customized prostheses
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2310/00—Prostheses classified in A61F2/28 or A61F2/30 - A61F2/44 being constructed from or coated with a particular material
- A61F2310/00005—The prosthesis being constructed from a particular material
- A61F2310/00011—Metals or alloys
Definitions
- a procedure is known in which a stent is placed and expanded for stenosis or obstruction (hereinafter referred to as "stenosis, etc.") that occurs in the digestive tract.
- a stent delivery system is used to place a stent in a stenosis or the like.
- a stent delivery system passes through a treatment instrument channel of an endoscope to deliver a stent to a stenosis or the like.
- the stent described in Patent Document 1 is formed in a form in which two bending points that bend in a V-shape are hooked to each other, and the shape followability is high even when bent.
- a stent having portions with high shape-following properties such as the form in which the bending points are mutually hooked as described in Patent Document 1
- a stent delivery system when housed in a stent delivery system, has a shape-following property with a large amount of wire overlap.
- the high-strength parts tend to be bulky and difficult to accommodate.
- the portion of the accommodated stent that has a high shape-following property is bulky, the force to expand the diameter increases, and the sliding resistance generated between the accommodated stent and the stent delivery system increases, so it cannot be released. Hateful.
- an object of the present invention is to provide a stent that has high conformability and is easy to accommodate and release, and a stent delivery system comprising the stent.
- a stent according to a first aspect of the present invention is a stent formed by weaving wires, and includes a plurality of straight line intersections where straight lines intersect, and bending in a first direction, which is one of the axial directions.
- the portion has a first straight line intersection portion where the first straight line portion and the second straight line portion intersect, and a second straight line intersection portion where the third straight line portion and the fourth straight line portion intersect, and the plurality of engaging portions is a first engaging portion where a first peak, which is the mountain-shaped bent portion, and a first valley, which is the valley-shaped bent portion, which are connected to the first direction side of the first straight portion intersect; a second engaging portion where a second peak, which is the mountain-shaped bent portion, and a second valley, which is the valley-shaped bent portion, which are connected to the first direction side of the straight portion and the fourth straight portion intersect; a third engaging portion where a third peak, which is the mountain-shaped bent portion, and a third valley, which is the valley-shaped bent portion, which are connected to the first direction
- a storage delivery system comprises an operating portion, an outer cylinder member configured to extend distally from the operating portion, and an outer cylinder member configured to extend distally from the operating portion. an inner tubular member inside the outer tubular member; and the stent accommodated between the outer tubular member and the inner tubular member, wherein the operating section longitudinally extends the outer tubular member or the inner tubular member. configured to deploy the stent by moving in a direction.
- the stent of the present invention has high conformability and is easy to accommodate and release.
- FIG. 2 is a developed view of the stent developed in the circumferential direction;
- FIG. 4 is an enlarged view of a region F1 shown in FIGS. 2 and 3;
- FIG. It is a figure explaining the deviation
- FIG. 2 is a cross-sectional view of the distal end of the stent delivery system; It is a figure which shows the same stent with a large gap.
- FIG. 4 is an exploded view of a modification of the same stent.
- FIG. 4 is a developed view of the stent according to the second embodiment of the present invention developed in the circumferential direction;
- FIG. 10 is an enlarged view of a region F2 shown in FIG. 9; It is the result of expansion force measurement of the stent according to the first embodiment.
- FIG. 1 is a diagram showing the overall configuration of an endoscope system 300. As shown in FIG.
- the endoscope system 300 includes an endoscope 200 and a stent delivery system 150 inserted through a channel of the endoscope 200.
- the endoscope 200 is a known side-viewing flexible endoscope, and includes an elongated insertion section 210 and an operation section 220 provided at the proximal end of the insertion section 210 . Note that the endoscope 200 may be a direct-view flexible endoscope.
- the insertion section 210 includes a distal rigid portion 211 provided at the distal end portion, a bendable bending portion 212 provided at the proximal end side of the distal rigid portion 211, and a flexible portion provided at the proximal end side of the bending portion 212. and a flexible tube portion 213 .
- An imaging unit 216 having a light guide 215 and a CCD is provided on the side surface of the distal end rigid portion 211 in a state of being exposed to the outside.
- the insertion portion 210 is formed with a treatment instrument channel 230 through which an endoscopic treatment instrument such as the stent delivery system 150 is inserted.
- a distal end portion 230 a of the treatment instrument channel 230 is open on the side surface of the distal end rigid portion 211 .
- a proximal end portion of the treatment instrument channel 230 extends to the operating portion 220 .
- a riser 214 is provided on the distal end hard portion 211 of the treatment instrument channel 230 .
- a base end portion of the raising base 214 is rotatably supported by the distal end rigid portion 211 .
- An elevator operating wire (not shown) fixed to the distal end of the elevator 214 extends through the insertion section 210 toward the proximal end.
- the bending portion 212 is configured to be freely bendable in the vertical and horizontal directions.
- the distal end of the operation wire is fixed to the distal end side of the bending portion 212 .
- the operation wire extends through the insertion portion 210 to the operation portion 220 .
- a knob 223 for operating the operation wire and a switch 224 for operating the imaging unit 216 and the like are provided on the proximal end side of the operation section 220 .
- the user can bend the bending portion 212 in a desired direction by operating the knob 223 .
- a forceps port 222 that communicates with the treatment instrument channel 230 is provided on the distal end side of the operation portion 220 .
- a user can insert an endoscopic instrument such as the stent delivery system 150 through the forceps port 222 .
- a forceps plug 225 is attached to the forceps port 222 to prevent leakage of bodily fluids.
- the stent delivery system 150 is elongated as a whole, and includes a stent 100 , an outer tubular member 110 , an inner tubular member 120 and an operating section 140 .
- the outer cylindrical member 110 is made of resin or the like in a cylindrical shape and has flexibility. Outer cylinder member 110 can be inserted through treatment instrument channel 230 of endoscope 200 .
- the inner cylinder member 120 has an outer diameter smaller than the inner diameter of the outer cylinder member 110 and can be passed through the inner space (lumen) of the outer cylinder member 110 .
- the inner cylindrical member 120 is made of resin or the like and has flexibility.
- a tip 130 having an outer diameter larger than that of the outer cylinder member 110 is provided at the tip of the inner cylinder member 120 .
- the stent 100 is housed at the distal end of the stent delivery system 150, as shown in FIG.
- the stent 100 is accommodated in the gap between the inner tubular member 120 and the outer tubular member 110 in a state in which the inner tubular member 120 is passed through the inside thereof and the diameter thereof is reduced.
- the operation part 140 is connected to the base end sides of the outer cylinder member 110 and the inner cylinder member 120, and is configured to allow the outer cylinder member 110 to move relative to the inner cylinder member 120 in the longitudinal direction.
- the operator moves the outer tube member 110 with respect to the inner tube member 120, thereby exposing the accommodated stent 100.
- the stent 100 can be placed.
- the operator can move the outer tube member 110 in the opposite direction relative to the inner tube member 120, thereby allowing the stent 100 to be re-accommodated.
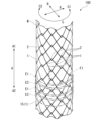
- FIG. 2 is a diagram showing the overall configuration of the stent 100. As shown in FIG.
- the stent 100 is formed by weaving wires and has a cylindrical shape.
- the stent 100 is indwelled in a digestive system body lumen such as a bile duct, esophagus, duodenum, small intestine, large intestine, etc., and is used mainly for the purpose of expanding and maintaining the lumen.
- a digestive system body lumen such as a bile duct, esophagus, duodenum, small intestine, large intestine, etc.
- the stent 100 of this embodiment is not a so-called covered stent whose outer peripheral surface side is covered with a resin film or the like, but an uncovered stent that is not covered with a film or the like.
- the stent 100 can also be used as a covered stent by being covered with a resin film or the like.
- first direction A1 one of the longitudinal axis directions (axial directions) A of the stent 100
- second direction A2 one of the longitudinal axis directions A of the stent 100
- first circumferential direction C1 one of the circumferential directions C of the stent 100
- second circumferential direction C2 one of the circumferential directions C of the stent 100
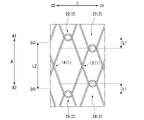
- FIG. 3 is a developed view of the stent 100 deployed in the circumferential direction C.
- the stent 100 is formed in the shape of a circular tube having meshes on its peripheral surface by wires W that extend obliquely in the circumferential direction C while repeatedly bending.
- the stent 100 has a plurality of straight crossing portions 1 and a plurality of hooking portions 2 .
- FIG. 4 is an enlarged view of the area F1 shown in FIGS. 2 and 3.
- FIG. The straight line crossing portion 1 is formed by the straight line portions 10 of the wires W crossing each other.
- the straight portion 10 is a substantially straight portion of the wire W that extends obliquely in the circumferential direction C, and includes a gently curved portion.
- the engaging portion (entangled portion) 2 is formed by intersecting the mountain-shaped bent portion 3 and the valley-shaped bent portion 4 .
- the mountain-shaped bent portion (mountain) 3 is a convex portion in which the wire W extending obliquely in the circumferential direction C is folded back in the longitudinal axis direction A and convexes in the first direction A1.
- the valley-shaped bent portion (trough) 4 is a convex portion (concave in the first direction A1 side) formed by bending the wire W that extends obliquely in the circumferential direction C by folding back in the longitudinal axis direction A. concave portion).
- the mountain-shaped bent portion 3 and the valley-shaped bent portion 4 intersect each other in a hook shape, so that the mountain-shaped bent portion 3 and the valley-shaped bent portion 4 are connected so as to be relatively movable although they cannot be separated. be done.
- the first regions E1 and the second regions E2 are alternately arranged in the longitudinal direction A.
- the first area E1 is an area in which a plurality of straight line intersections 1 are arranged in the circumferential direction C.
- a second region E2 is a region in which a plurality of engaging portions 2 and one straight crossing portion 1 are arranged in the circumferential direction C.
- One straight crossing portion 1 arranged in the second region E2 is provided for the wire W to move in the longitudinal axis direction A (step up, step down).
- one straight line crossing portion 1 arranged in the second region E2 is also referred to as a "step-moving crossing portion 15".
- one step-movement crossing portion 15 is arranged for each second region E2.
- the plurality of step-movement crossing portions 15 are arranged at different positions in the circumferential direction C. As shown in FIG.
- the stent 100 Since the stent 100 is provided with a plurality of second regions E2 in which a plurality of engaging portions 2 are arranged in the circumferential direction C, the stent 100 has high shape followability even when bent.
- first straight intersection 1A The first straight line portion 11 and the second straight line portion 12, which are the straight line portions 10, intersect at the "first straight line intersection portion 1A", which is the straight line intersection portion 1, as shown in FIG. Specifically, when viewed from the radial direction R (see FIG. 2) of the stent 100, the first straight line portion 11 and the second straight line portion 12 intersect at the first straight line intersection portion 1A. At the first straight line intersection portion 1A, the first straight line portion 11 passes outside the second straight line portion 12 in the radial direction R.
- the first straight line crossing portion 1A and the second straight line crossing portion 1B are straight line crossing portions 1 adjacent to each other in the circumferential direction C.
- the first straight line intersection portion 1A and the second straight line intersection portion 1B are arranged in the same first region E1.
- First engagement portion 21 A “first mountain 31 ”, which is the mountain-shaped bent portion 3 , continues on the first direction A ⁇ b>1 side of the first straight portion 11 .
- the first peak 31 intersects with the first valley 41 that is the valley-shaped bent portion 4 to form the “first engaging portion 21 ” that is the engaging portion 2 .
- the first crest 31 and the first valley 41 intersect at the first crossing portion G1 and the second crossing portion G2.
- the second intersection G2 is closer to the first straight intersection 1A than the first intersection G1.
- the first crest 31 passes through the outer side of the first valley 41 in the radial direction R.
- the first peak 31 passes inside the first valley 41 in the radial direction R.
- the second peaks 32 and the second valleys 42 intersect at the third intersection G3 and the fourth intersection G4.
- the third intersection G3 is closer to the first straight intersection 1A than the fourth intersection G4.
- the fourth intersection G4 is closer to the second straight intersection 1B than the third intersection G3.
- the second peak 32 passes outside the second valley 42 in the radial direction R.
- the second peak 32 passes through the inside of the second valley 42 in the radial direction R.
- the third peak 33 intersects with the third valley 43 that is the valley-shaped bent portion 4 to form the “third hooking portion 23 ” that is the hooking portion 2 .
- the third crest 33 and the third valley 43 intersect at the fifth intersection G5 and the sixth intersection G6.
- the fifth intersection G5 is closer to the second straight intersection 1B than the sixth intersection G6.
- the third peak 33 passes outside the third valley 43 in the radial direction R.
- the third peak 33 passes inside the third valley 43 in the radial direction R.
- the fourth valley 44 intersects with the fourth peak 34 that is the mountain-shaped bent portion 3 to form the "fourth hooking portion 24" that is the hooking portion 2. As shown in FIG.
- the fourth crest 34 and the fourth valley 44 intersect at the seventh intersection G7 and the eighth intersection G8.
- the eighth intersection G8 is closer to the second straight intersection 1B than the seventh intersection G7.
- the fourth valley 44 passes outside the fourth crest 34 in the radial direction R at the seventh intersection G7.
- the fourth valley 44 passes inside the fourth crest 34 in the radial direction R at the eighth intersection G8.
- the fifth valley 45 intersects with the fifth peak 35 that is the mountain-shaped bent portion 3 to form the “fifth hooking portion 25 ” that is the hooking portion 2 .
- the fifth peak 35 and the fifth valley 45 intersect at the ninth intersection G9 and the tenth intersection G10.
- the ninth intersection G9 is closer to the second straight intersection 1B than the tenth intersection G10.
- the tenth intersection G10 is closer to the first straight intersection 1A than the ninth intersection G9.
- the fifth valley 45 passes outside the fifth crest 35 in the radial direction R.
- the fifth valley 45 passes inside the fifth crest 35 in the radial direction R.
- the sixth valley 46 intersects with the sixth peak 36 that is the mountain-shaped bent portion 3 to form the "sixth hook portion 26" that is the hook portion 2. As shown in FIG.
- the sixth crest 36 and the sixth valley 46 intersect at the eleventh intersection G11 and the twelfth intersection G12.
- the eleventh intersection G11 is closer to the first straight intersection 1A than the twelfth intersection G12.
- the sixth valley 46 passes outside the sixth crest 36 in the radial direction R at the eleventh intersection G11.
- the sixth valley 46 passes through the inside of the sixth crest 36 in the radial direction R at the twelfth intersection G12.
- first engaging portion 21, second engaging portion 22, and third engaging portion 23 are arranged at different positions in the longitudinal axis direction A. As shown in FIG. Specifically, the second engaging portion 22 is arranged on the first direction A1 side from the first engaging portion 21 in the longitudinal axis direction A. As shown in FIG.
- the second engaging portion 22 and the third engaging portion 23 are arranged at different positions in the longitudinal axis direction A. Specifically, the third engaging portion 23 is arranged on the second direction A2 side of the second engaging portion 22 in the longitudinal axis direction A. As shown in FIG.
- the fourth engaging portion 24 and the fifth engaging portion 25 are arranged at different positions in the longitudinal axis direction A. As shown in FIG. Specifically, the fifth engaging portion 25 is arranged on the second direction A2 side from the fourth engaging portion 24 in the longitudinal axis direction A. As shown in FIG.
- the fifth engaging portion 25 and the sixth engaging portion 26 are arranged at different positions in the longitudinal axis direction A. Specifically, the sixth engaging portion 26 is arranged on the first direction A1 side from the fifth engaging portion 25 in the longitudinal axis direction A. As shown in FIG.
- the first peak 31, the first straight portion 11, the fifth valley 45, the third straight portion 13, and the third peak 33 are continuous portions (first wire W1) of the wire W extending zigzag along the circumferential direction C. be.
- the sixth valley 46, the second straight portion 12, the second peak 32, the fourth straight portion 14, and the fourth valley 44 are continuous portions (second wire W2).
- the first wire W1 and the second wire W2 may be one continuous wire or different wires.
- a first straight crossing portion 1A and a second straight crossing portion 1B, which are adjacent straight crossing portions 1, and six engaging portions 2 have the above configuration.
- the engaging portions 2 of the stent 100 connected to other adjacent straight-line intersections 1 have the same configuration as described above, except for the portions where the step-shifted intersections 15 are provided.
- the engaging portions 2 arranged in the second region E2 in the circumferential direction C are arranged at different positions in the longitudinal axis direction A from the adjacent engaging portions 2 .
- the engaging portions 2 arranged in the circumferential direction C in the second region E2 are arranged alternately one by one with respect to the longitudinal axis direction A. As shown in FIG.
- FIG. 5 is a diagram for explaining the deviation L1 and the pitch L2.
- the length in the longitudinal axis direction A of the position of the engaging portion 2 closest to the first direction A1 in the second region E2 and the position of the engaging portion 2 closest to the second direction A2 in the same second region E2 It is defined as "deviation L1".
- the position of the engaging portion 2 is the center position of the engaging portion 2 in the stent 100 that is naturally expanded in a straight state.
- the length in the longitudinal direction A of the second regions E2 adjacent to each other in the longitudinal direction A is defined as "pitch L2".
- the length in the longitudinal direction A of the two second regions E2 is the distance between the central axes EO of the second regions E2.
- the central axis EO is the longitudinal axis direction of the position of the engaging portion 2 closest to the first direction A1 in the second region E2 and the position of the engaging portion 2 closest to the second direction A2 in the same second region E2. It is a straight line parallel to the circumferential direction C passing through the midpoint of A.
- FIG. 6 is a cross-sectional view of the distal end of stent delivery system 150 .
- the stent 100 is accommodated in the gap between the inner tubular member 120 and the outer tubular member 110 while being reduced in diameter in the radial direction R.
- the wires W tend to be bulkier in the radial direction R than other portions of the stent 100 when the diameter of the engaging portion 2 is reduced in the radial direction R.
- the stent 100 has the engaging portions 2 dispersed in the longitudinal direction A in the second region E2, the bulkiness of the wire W in the radial direction R can be reduced. As such, stent 100 is easy to accommodate in a stent delivery system.
- FIG. 7 shows a stent 100 with a large deviation L1.
- the stent 100 can preferably reduce the bulkiness of the wire W in the radial direction R when the stent 100 is contracted in the radial direction R shown in FIG. 6 as the deviation L1 becomes larger.
- the deviation L1 is desirably less than half the pitch L2.
- the bulkiness is most reduced when the deviation L1 is half the pitch L2. If the deviation L1 is larger than half the pitch L2, the shape followability of the engaging portions 2 arranged in the circumferential direction C in the second region E2 is reduced.
- the operator inserts the insertion portion 210 of the endoscope 200 into the patient's body cavity through a natural opening such as the mouth. At that time, the operator bends the bending portion 212 by operating the knob 223 or the like as necessary.
- the operator passes the guidewire through the treatment instrument channel 230 of the endoscope 200 and inserts the guidewire into the bile duct while observing with the endoscope 200 . Subsequently, the operator operates the guidewire under X-ray fluoroscopy to break through the narrowed site in the bile duct, and moves the distal end of the guidewire to the liver side of the narrowed site (target position).
- the operator inserts the proximal end of the guide wire protruding from the forceps plug 225 of the endoscope 200 into the through hole of the tip 130 of the stent delivery system 150 .
- the operator advances the stent delivery system 150 along the guidewire by pushing the stent delivery system 150 while holding the guidewire.
- the distal end of stent delivery system 150 protrudes from the distal end of treatment instrument channel 230 of endoscope 200 .
- the operator advances and retracts the stent delivery system 150 to determine the indwelling position of the stent 100 . Note that the operator may insert the stent delivery system 150 into the treatment instrument channel 230 without using a guide wire.
- the operator After determining the target position of the stent 100 , the operator retracts the outer cylinder member 110 with respect to the inner cylinder member 120 . As a result, as shown in FIG. 1, the stent 100 is gradually exposed and expanded from the distal end side.
- the diameter-expanding force increases in the bulky portion of the engaging portion 2 where the wire W overlaps a lot.
- the engaging portions 2 are arranged dispersedly in the longitudinal direction A in the second region E2, the force to expand the diameter of the engaging portions 2 can be dispersed. Therefore, the accommodated stent has less sliding resistance with respect to the outer tube member 110 of the stent delivery system 150, so that it can be easily released.
- the stent 100 When the stent 100 is completely exposed, the stent 100 expands as a whole and the inner diameter of the stent 100 becomes larger than the outer diameter of the inner tubular member 120 . Along with this, the locking between the stent 100 and the inner tubular member 120 is released.
- the stent 100 After the locking between the stent 100 and the inner tubular member 120 is released, when the operator retracts the inner tubular member 120 , the stent 100 remains at the indwelling position and the inner tubular member 120 is removed from the stent 100 .
- the placement procedure of the stent 100 is completed.
- the hooking portion 2 with many overlapping wires W is provided, and the shape followability is high.
- the stent 100 since the stent 100 has the hooking portions 2 in which the wires W overlap each other in a dispersed manner in the longitudinal direction A, the stent 100 can be easily accommodated in the stent delivery system 150 and released from the stent delivery system 150 .
- FIG. 8 is an exploded view of a stent 100A that is a modification of stent 100.
- the stent 100A differs from the stent 100 only in the arrangement of the engaging portions 2 in the second region E2.
- the engaging portions 2 arranged in the circumferential direction C in the second region E2 are arranged in the longitudinal axis direction A at any one of the first position P1, the second position P2 and the third position P3.
- the first position P1, the second position P2 and the third position P3 are arranged from the first direction A1 side toward the second direction A2 side.
- the engaging portion 2 (2P3) arranged at P3 is arranged repeatedly.
- the engaging portions 2 in which the wires W are often overlapped are distributed in the longitudinal axis direction A. As shown in FIG.
- the plurality of engaging portions 2 arranged in the circumferential direction C in the second region E2 may be dispersedly arranged at four or more different positions in the longitudinal axis direction A.
- the engaging portion 2 on the first circumferential direction C1 side is the engaging portion 2 on the second circumferential direction C2 side in the longitudinal axis direction A. It may be arranged on the one direction A1 side, or may be arranged on the second direction A2 side.
- a second embodiment of the present invention will be described with reference to FIGS. 9 to 10.
- FIG. In the following description, the same reference numerals are given to the same configurations as those already described, and redundant descriptions will be omitted.
- a stent 100B according to the second embodiment is housed in a stent delivery system 150, like the stent 100 according to the first embodiment.
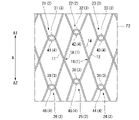
- FIG. 9 is a developed view of the stent 100B deployed in the circumferential direction C.
- the stent 100B is formed by weaving wires W and has a cylindrical shape.
- the stent 100B has a plurality of linear crossing portions 1 and a plurality of hooking portions 2. As shown in FIG.
- the stent 100B differs from the stent 100 of the first embodiment only in the arrangement of the engaging portions 2. As shown in FIG.
- FIG. 10 is an enlarged view of area F2 shown in FIG.
- the first engaging portion 21 and the second engaging portion 22 are arranged at different positions in the longitudinal axis direction A.
- the second engaging portion 22 is arranged on the first direction A1 side from the first engaging portion 21 in the longitudinal axis direction A.
- FIG. 10 shows that
- the second engaging portion 22 and the third engaging portion 23 are arranged at different positions in the longitudinal axis direction A. Specifically, the third engaging portion 23 is arranged on the second direction A2 side of the second engaging portion 22 in the longitudinal axis direction A. As shown in FIG.
- the fourth engaging portion 24 and the fifth engaging portion 25 are arranged at different positions in the longitudinal axis direction A. As shown in FIG. Specifically, the fifth engaging portion 25 is arranged on the first direction A1 side from the fourth engaging portion 24 in the longitudinal axis direction A. As shown in FIG.
- the fifth engaging portion 25 and the sixth engaging portion 26 are arranged at different positions in the longitudinal axis direction A. Specifically, the sixth engaging portion 26 is arranged on the second direction A2 side from the fifth engaging portion 25 in the longitudinal axis direction A. As shown in FIG.
- the hooking portion 2 with many overlapping wires W is provided, and the shape followability is high.
- the stent 100B since the stent 100B has the engaging portions 2 in which the wires W overlap each other in a dispersed manner in the longitudinal direction A, the stent 100B can be easily accommodated in the stent delivery system 150 and released from the stent delivery system 150 .
- Example 1 is the stent 100 of the above embodiment. Comparative Example 1 is a stent in which the displacement L1 of the stent 100 is zero.
- Example 1 Using Example 1 and Comparative Example 1, expansion force was measured. Expansion force measurement was performed based on "4 Measurement of radial force" defined in JIS T3269. A stent placed in a 37° C. bath undergoes repeated alternating contraction and expansion of the entire stent.
- FIG. 11 shows the results of the expansion force measurement of the stent 100.
- the expansion force of Example 1 is smaller than that of Comparative Example 1 when the diameter of the stent is reduced to the maximum.
- the engaging portions 2 are dispersed in the longitudinal direction A in the second region E2
- the bulkiness of the wire W in the radial direction R can be reduced, and the engaging portions 2 tend to expand in diameter. This is because the force can be dispersed.
- the present invention can be applied to stents formed by weaving wires or the like.
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Vascular Medicine (AREA)
- Transplantation (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Cardiology (AREA)
- Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Optics & Photonics (AREA)
- Radiology & Medical Imaging (AREA)
- Pathology (AREA)
- Media Introduction/Drainage Providing Device (AREA)
Abstract
Description
本発明の第一の態様に係るステントは、ワイヤを編み込んで形成されたステントであって、直線部が交差する複数の直線交差部と、軸方向の一方である第一方向側に屈曲して凸となる山型屈曲部と、前記軸方向の他方である第二方向側に屈曲して凸となる谷型屈曲部と、が交差する複数の掛合部と、を備え、前記複数の直線交差部は、第一直線部と第二直線部とが交差する第一直線交差部と、第三直線部と第四直線部とが交差する第二直線交差部と、を有し、前記複数の掛合部は、前記第一直線部の前記第一方向側に連なる前記山型屈曲部である第一山と、前記谷型屈曲部である第一谷と、が交差する第一掛合部と、前記第二直線部および前記第四直線部の前記第一方向側に連なる前記山型屈曲部である第二山と、前記谷型屈曲部である第二谷と、が交差する第二掛合部と、前記第三直線部の前記第一方向側に連なる前記山型屈曲部である第三山と、前記谷型屈曲部である第三谷と、が交差する第三掛合部と、前記第一直線部および前記第三直線部の前記第二方向側に連なる前記谷型屈曲部である第五谷と、前記山型屈曲部である第五山と、が交差する第五掛合部と、を有し、前記第一掛合部と前記第二掛合部とは、前記軸方向において異なる位置に配置され、前記第二掛合部と前記第三掛合部とは、前記軸方向において異なる位置に配置される
本発明の第一実施形態に係るステント100を備える内視鏡システム300について、図1から図7を参照して説明する。図1は、内視鏡システム300の全体構成を示す図である。
内視鏡システム300は、内視鏡200と、内視鏡200のチャネルに挿通されるステントデリバリーシステム150と、を備える。
内視鏡200は、公知の側視型の軟性内視鏡であり、長尺の挿入部210と、挿入部210の基端部に設けられた操作部220と、を備える。なお、内視鏡200は直視型の軟性内視鏡であってもよい。
ステントデリバリーシステム150は、全体として細長に形成され、ステント100と、外筒部材110と、内筒部材120と、操作部140と、を備える。
図2は、ステント100の全体構成を示す図である。
ステント100は、ワイヤを編み込んで形成されており、円筒形状を有する。ステント100は、胆管、食道、十二指腸、小腸、大腸等の消化器系体内管腔等に留置され、主として管腔を拡張・保持する目的で使用される。
ステント100は、屈曲を繰り返しながら周方向Cに傾いて延びるワイヤWにより、網目を周面に有する円管状に形成されている。ステント100は、複数の直線交差部1と、複数の掛合部2と、を有する。
直線交差部1は、ワイヤWの直線部10が直線交差して形成される。直線部10は、周方向Cに傾いて延びるワイヤWの略直線状の部分であり、ゆるやかに湾曲している部分も含む。
直線部10である第一直線部11と第二直線部12とは、図4に示すように、直線交差部1である「第一直線交差部1A」において交差する。具体的には、ステント100の径方向R(図2参照)から見て、第一直線部11と第二直線部12とは、第一直線交差部1Aにおいて交差する。第一直線交差部1Aにおいて、第一直線部11は第二直線部12の径方向Rにおける外側を通過する。
直線部10である第三直線部13と第四直線部14とは、図4に示すように、直線交差部1である「第二直線交差部1B」において交差する。具体的には、ステント100の径方向R(図2参照)から見て、第三直線部13と第四直線部14とは、第二直線交差部1Bにおいて交差する。第二直線交差部1Bにおいて、第三直線部13は第四直線部14の径方向Rにおける内側を通過する。
第一直線部11の第一方向A1側には、山型屈曲部3である「第一山31」が連なっている。第一山31は、谷型屈曲部4である第一谷41と交差して掛合部2である「第一掛合部21」を形成する。
第二直線部12および第四直線部14の第一方向A1側には、山型屈曲部3である「第二山32」が連なっている。第二山32は、谷型屈曲部4である第二谷42と交差して掛合部2である「第二掛合部22」を形成する。
第三直線部13の第一方向A1側には、山型屈曲部3である「第三山33」が連なっている。第三山33は、谷型屈曲部4である第三谷43と交差して掛合部2である「第三掛合部23」を形成する。
第四直線部14の第二方向A2側には、谷型屈曲部4である「第四谷44」が連なっている。第四谷44は、山型屈曲部3である第四山34と交差して掛合部2である「第四掛合部24」を形成する。
第一直線部11および第三直線部13の第二方向A2側には、谷型屈曲部4である「第五谷45」が連なっている。第五谷45は、山型屈曲部3である第五山35と交差して掛合部2である「第五掛合部25」を形成する。
第二直線部12の第二方向A2側には、谷型屈曲部4である「第六谷46」が連なっている。第六谷46は、山型屈曲部3である第六山36と交差して掛合部2である「第六掛合部26」を形成する。
第一掛合部21と第二掛合部22とは、長手軸方向Aにおいて異なる位置に配置される。具体的には、第二掛合部22は、長手軸方向Aにおいて第一掛合部21より第一方向A1側に配置される。
第四掛合部24と第五掛合部25とは、長手軸方向Aにおいて異なる位置に配置される。具体的には、第五掛合部25は、長手軸方向Aにおいて第四掛合部24より第二方向A2側に配置される。
第一山31と第一直線部11と第五谷45と第三直線部13と第三山33は、周方向Cに沿ってジグザグに延びるワイヤWの連続する一部(第一ワイヤW1)である。また、第六谷46と第二直線部12と第二山32と第四直線部14と第四谷44とは、周方向Cに沿ってジグザグに延びるワイヤWの連続する一部(第二ワイヤW2)である。第一ワイヤW1と第二ワイヤW2とは、一本の連続するワイヤであってもよいし、異なるワイヤであってもよい。
隣り合う直線交差部1である第一直線交差部1Aおよび第二直線交差部1Bと、第一直線交差部1Aおよび第二直線交差部1Bに連なる6個の掛合部2(第一掛合部21、第二掛合部22、第三掛合部23、第四掛合部24、第五掛合部25および第六掛合部26)は、上記の構成を備える。図3に示すように、ステント100における他の隣り合う直線交差部1に連なる掛合部2は、段移動交差部15が設けられた部分を除いて、上記の構成と同様の構成を備える。
図3に示すように、第二領域E2に周方向Cに配列する掛合部2は、隣り合う掛合部2と長手軸方向Aにおいて異なる位置に配置される。具体的には、第二領域E2に周方向Cに配列する掛合部2は、長手軸方向Aに対して一つずつ交互に配置される。
第二領域E2において最も第一方向A1側にある掛合部2の位置と、同じ第二領域E2において最も第二方向A2側にある掛合部2の位置と、の長手軸方向Aにおける長さを「ズレL1」と定義する。ここで、掛合部2の位置とは、直線状態に自然拡張したステント100における掛合部2の中心の位置である。
ステントデリバリーシステム150を含む内視鏡システム300を用いたステント留置方法を、胆管内にステント100を留置する手技を例として説明する。
ステント100は、径方向Rに縮径した状態で、内筒部材120と外筒部材110との間の隙間に収容される。ワイヤWの重なりが多い掛合部2は、径方向Rに縮径した状態において、ステント100の他の部分より、ワイヤWが径方向Rにかさばりやすい。しかしながら、ステント100は、第二領域E2において、掛合部2が長手軸方向Aに分散して配置されているため、径方向RにおけるワイヤWのかさばりを低減できる。そのため、ステント100は、ステントデリバリーシステムに収容しやすい。
ステント100は、ズレL1がより大きいほど、図6に示す径方向Rに縮径した状態において、径方向RへのワイヤWのかさばりを好適に低減できる。ここで、ズレL1は、ピッチL2の半分以下であることが望ましい。ズレL1がピッチL2の半分となるときに、かさばりが最も低減される。ズレL1がピッチL2の半分より大きい場合、第二領域E2において周方向Cに配列する掛合部2による形状追従性が低下してしまう。
上記実施形態において、第二領域E2において周方向Cに配列する掛合部2は、長手軸方向Aに対して一つずつ交互に配置される。しかしながら、第二領域E2における掛合部2の配置態様はこれに限定されない。図8は、ステント100の変形例であるステント100Aの展開図である。ステント100Aは、ステント100と比較して、第二領域E2における掛合部2の配置態様のみが異なる。
本発明の第二実施形態について、図9から図10を参照して説明する。以降の説明において、既に説明したものと共通する構成については、同一の符号を付して重複する説明を省略する。第二実施形態に係るステント100Bは、第一実施形態に係るステント100と同様に、ステントデリバリーシステム150に収容される。
ステント100Bは、第一実施形態のステント100と同様に、ワイヤWを編み込んで形成されており、円筒形状を有する。また、ステント100Bは、複数の直線交差部1と、複数の掛合部2と、を有する。ステント100Bは、第一実施形態のステント100と比較して、掛合部2の配置のみが異なる。
図10は、図9に示す領域F2の拡大図である。
第一掛合部21と第二掛合部22とは、長手軸方向Aにおいて異なる位置に配置される。具体的には、第二掛合部22は、長手軸方向Aにおいて第一掛合部21より第一方向A1側に配置される。
第四掛合部24と第五掛合部25とは、長手軸方向Aにおいて異なる位置に配置される。具体的には、第五掛合部25は、長手軸方向Aにおいて第四掛合部24より第一方向A1側に配置される。
比較例1は、ステント100のズレL1をゼロにしたステントである。
ステントが最も縮径した状態において、実施例1の拡張力は、比較例1の拡張力よりも小さい。実施例1は、第二領域E2において、掛合部2が長手軸方向Aに分散して配置されているため、径方向RにおけるワイヤWのかさばりを低減でき、掛合部2が拡径しようとする力を分散できるためである。
200 内視鏡
150 ステントデリバリーシステム
110 外筒部材
120 内筒部材
130 チップ
100,100A,100B ステント
1 直線交差部
10 直線部
11 第一直線部
12 第二直線部
13 第三直線部
14 第四直線部
15 段移動交差部
1A 第一直線交差部
1B 第二直線交差部
2 掛合部(絡合部)
21 第一掛合部
22 第二掛合部
23 第三掛合部
24 第四掛合部
25 第五掛合部
26 第六掛合部
3 山型屈曲部(山)
31 第一山
32 第二山
33 第三山
34 第四山
35 第五山
36 第六山
4 谷型屈曲部(谷)
41 第一谷
42 第二谷
43 第三谷
44 第四谷
45 第五谷
46 第六谷
Claims (11)
- ワイヤを編み込んで形成されたステントであって、
直線部が交差する複数の直線交差部と、
軸方向の一方である第一方向側に屈曲して凸となる山型屈曲部と、前記軸方向の他方である第二方向側に屈曲して凸となる谷型屈曲部と、が交差する複数の掛合部と、
を備え、
前記複数の直線交差部は、
第一直線部と第二直線部とが交差する第一直線交差部と、
第三直線部と第四直線部とが交差する第二直線交差部と、
を有し、
前記複数の掛合部は、
前記第一直線部の前記第一方向側に連なる前記山型屈曲部である第一山と、前記谷型屈曲部である第一谷と、が交差する第一掛合部と、
前記第二直線部および前記第四直線部の前記第一方向側に連なる前記山型屈曲部である第二山と、前記谷型屈曲部である第二谷と、が交差する第二掛合部と、
前記第三直線部の前記第一方向側に連なる前記山型屈曲部である第三山と、前記谷型屈曲部である第三谷と、が交差する第三掛合部と、
前記第一直線部および前記第三直線部の前記第二方向側に連なる前記谷型屈曲部である第五谷と、前記山型屈曲部である第五山と、が交差する第五掛合部と、
を有し、
前記第一掛合部と前記第二掛合部とは、前記軸方向において異なる位置に配置され、
前記第二掛合部と前記第三掛合部とは、前記軸方向において異なる位置に配置される、
ステント。 - 前記第二掛合部は前記軸方向において前記第一掛合部より前記第一方向側に配置され、
前記第三掛合部は前記軸方向において前記第二掛合部より前記第二方向側に配置される、
請求項1に記載のステント。 - 前記複数の直線交差部が周方向に配置される第一領域と、
前記複数の掛合部と1個の前記直線交差部とが前記周方向に配置される第二領域とは、
前記軸方向において交互に配置される、
請求項1に記載のステント。 - 前記第二領域に配置される前記直線交差部は、前記周方向において異なる位置に配置される、
請求項3に記載のステント。 - 前記第二領域において最も前記第一方向側にある前記掛合部の位置と、同じ前記第二領域において最も前記第二方向側にある前記掛合部の位置との前記軸方向における長さは、
前記軸方向に隣り合う前記第二領域の前記軸方向における長さの半分以下である、
請求項3に記載のステント。 - 前記複数の掛合部は、
前記第四直線部の前記第二方向側に連なる前記谷型屈曲部である第四谷と、前記山型屈曲部である第四山と、が交差する第四掛合部と、
前記第二直線部の前記第二方向側に連なる前記谷型屈曲部である第六谷と、前記山型屈曲部である第六山と、が交差する第六掛合部と、
をさらに備え、
前記第四掛合部と前記第五掛合部とは、前記軸方向において異なる位置に配置され、
前記第五掛合部と前記第六掛合部とは、前記軸方向において異なる位置に配置される、
請求項1に記載のステント。 - 前記第二掛合部は前記軸方向において前記第一掛合部より前記第一方向側に配置され、
前記第三掛合部は前記軸方向において前記第二掛合部より前記第二方向側に配置され、
前記第五掛合部は前記軸方向において前記第四掛合部より前記第二方向側に配置され、
前記第六掛合部は前記軸方向において前記第五掛合部より前記第一方向側に配置される、
請求項6に記載のステント。 - 前記第二掛合部は前記軸方向において前記第一掛合部より前記第一方向側に配置され、
前記第三掛合部は前記軸方向において前記第二掛合部より前記第一方向側に配置され、
前記第五掛合部は前記軸方向において前記第四掛合部より前記第一方向側に配置され、
前記第六掛合部は前記軸方向において前記第五掛合部より前記第一方向側に配置される、
請求項6に記載のステント。 - 前記第二掛合部は前記軸方向において前記第一掛合部より前記第一方向側に配置され、
前記第三掛合部は前記軸方向において前記第二掛合部より前記第二方向側に配置され、
前記第五掛合部は前記軸方向において前記第四掛合部より前記第一方向側に配置され、
前記第六掛合部は前記軸方向において前記第五掛合部より前記第二方向側に配置される、
請求項6に記載のステント。 - 操作部と、
前記操作部から遠位側で延びるように構成される外筒部材と、
前記操作部から遠位側で延びるように構成され、前記外筒部材の内側にある内筒部材と、
前記外筒部材と前記内筒部材の間に収容され、請求項1から請求項9のいずれか一項に記載のステントと、
を備え、
前記操作部は、前記外筒部材または前記内筒部材を長手方向に移動させることで前記ステントを留置するよう構成される、
ステントデリバリーシステム。 - 前記外筒部材は、内視鏡のチャネルに挿通可能に構成される、
請求項10に記載のステントデリバリーシステム。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP21958354.9A EP4406517A1 (en) | 2021-09-22 | 2021-09-22 | Stent and stent delivery system |
| CN202180102419.6A CN117999050A (zh) | 2021-09-22 | 2021-09-22 | 支架及支架输送系统 |
| JP2023549209A JPWO2023047477A1 (ja) | 2021-09-22 | 2021-09-22 | |
| PCT/JP2021/034669 WO2023047477A1 (ja) | 2021-09-22 | 2021-09-22 | ステントおよびステントデリバリーシステム |
| KR1020247006278A KR20240033284A (ko) | 2021-09-22 | 2021-09-22 | 스텐트 및 스텐트 전달 시스템 |
| US18/596,880 US20240245539A1 (en) | 2021-09-22 | 2024-03-06 | Stent and stent delivery system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/034669 WO2023047477A1 (ja) | 2021-09-22 | 2021-09-22 | ステントおよびステントデリバリーシステム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/596,880 Continuation US20240245539A1 (en) | 2021-09-22 | 2024-03-06 | Stent and stent delivery system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023047477A1 true WO2023047477A1 (ja) | 2023-03-30 |
Family
ID=85720285
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/034669 WO2023047477A1 (ja) | 2021-09-22 | 2021-09-22 | ステントおよびステントデリバリーシステム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20240245539A1 (ja) |
| EP (1) | EP4406517A1 (ja) |
| JP (1) | JPWO2023047477A1 (ja) |
| KR (1) | KR20240033284A (ja) |
| CN (1) | CN117999050A (ja) |
| WO (1) | WO2023047477A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07265438A (ja) | 1993-09-27 | 1995-10-17 | Sooho Medi Tech Co Ltd | 脈管拡張用医療用具 |
| KR100824074B1 (ko) * | 2007-04-24 | 2008-04-21 | 주식회사 엠아이텍 | 스텐트 |
| JP2019504701A (ja) * | 2016-02-15 | 2019-02-21 | テウン メディカル カンパニー リミテッド | 形状記憶合金ワイヤーを用いたステントの製造方法、これにより製造されたステント、及びこれを製造するためのジグ |
| WO2021166156A1 (ja) * | 2020-02-20 | 2021-08-26 | オリンパス株式会社 | ステントデリバリーシステム、内視鏡システムおよびステント留置方法 |
-
2021
- 2021-09-22 EP EP21958354.9A patent/EP4406517A1/en active Pending
- 2021-09-22 CN CN202180102419.6A patent/CN117999050A/zh active Pending
- 2021-09-22 WO PCT/JP2021/034669 patent/WO2023047477A1/ja active Application Filing
- 2021-09-22 KR KR1020247006278A patent/KR20240033284A/ko active Search and Examination
- 2021-09-22 JP JP2023549209A patent/JPWO2023047477A1/ja active Pending
-
2024
- 2024-03-06 US US18/596,880 patent/US20240245539A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07265438A (ja) | 1993-09-27 | 1995-10-17 | Sooho Medi Tech Co Ltd | 脈管拡張用医療用具 |
| KR100824074B1 (ko) * | 2007-04-24 | 2008-04-21 | 주식회사 엠아이텍 | 스텐트 |
| JP2019504701A (ja) * | 2016-02-15 | 2019-02-21 | テウン メディカル カンパニー リミテッド | 形状記憶合金ワイヤーを用いたステントの製造方法、これにより製造されたステント、及びこれを製造するためのジグ |
| WO2021166156A1 (ja) * | 2020-02-20 | 2021-08-26 | オリンパス株式会社 | ステントデリバリーシステム、内視鏡システムおよびステント留置方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240245539A1 (en) | 2024-07-25 |
| EP4406517A1 (en) | 2024-07-31 |
| KR20240033284A (ko) | 2024-03-12 |
| CN117999050A (zh) | 2024-05-07 |
| JPWO2023047477A1 (ja) | 2023-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20220104933A1 (en) | Biliary stents and methods | |
| KR102487146B1 (ko) | 양성 전립선 비대증(bph) 및 하부 요로 증상(luts)을 치료하기 위한 임플란트 | |
| JP6457100B2 (ja) | 低侵襲胃腸手術療法のためのシステム | |
| JP4268779B2 (ja) | 可撓性末端管腔ステントおよび製造方法 | |
| EP2512319B1 (en) | Advancing system | |
| JP5611451B2 (ja) | 胆管アクセスシース | |
| JP2008538709A (ja) | 外部作業チャネルを有する器具 | |
| JP7446310B2 (ja) | 拡張可能な作業チャネルを有する内視鏡 | |
| CN101061943B (zh) | 医疗管状组件 | |
| KR20230128073A (ko) | 배액 디바이스 및 사용 방법 | |
| WO2023032052A1 (ja) | ステントおよびステントデリバリーシステム | |
| WO2023047477A1 (ja) | ステントおよびステントデリバリーシステム | |
| WO2023032084A1 (ja) | ステントデバイスおよびステントデリバリーシステム | |
| JP7448294B2 (ja) | ステント | |
| KR102235960B1 (ko) | 길이 조절 가능한 내강용 스텐트 | |
| US20230329887A1 (en) | Multiple flare and shoulder anti migration stent | |
| WO2024209584A1 (ja) | ステントデバイス | |
| KR20220010814A (ko) | 스텐트 | |
| BR112019021937B1 (pt) | Implante recuperável |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21958354 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 20247006278 Country of ref document: KR Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 1020247006278 Country of ref document: KR |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023549209 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202180102419.6 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2021958354 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021958354 Country of ref document: EP Effective date: 20240422 |