WO2022219984A1 - モジュール駆動装置及び光学装置 - Google Patents
モジュール駆動装置及び光学装置 Download PDFInfo
- Publication number
- WO2022219984A1 WO2022219984A1 PCT/JP2022/011224 JP2022011224W WO2022219984A1 WO 2022219984 A1 WO2022219984 A1 WO 2022219984A1 JP 2022011224 W JP2022011224 W JP 2022011224W WO 2022219984 A1 WO2022219984 A1 WO 2022219984A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- module
- wire
- fixed
- movable
- holder
- Prior art date
Links
- 230000003287 optical effect Effects 0.000 title claims abstract description 87
- 229910001285 shape-memory alloy Inorganic materials 0.000 claims abstract description 90
- 238000003384 imaging method Methods 0.000 claims abstract description 21
- 239000002184 metal Substances 0.000 claims description 134
- 229910052751 metal Inorganic materials 0.000 claims description 134
- 239000004020 conductor Substances 0.000 claims description 4
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 71
- 239000000758 substrate Substances 0.000 description 27
- 239000000853 adhesive Substances 0.000 description 26
- 230000001070 adhesive effect Effects 0.000 description 26
- 230000007935 neutral effect Effects 0.000 description 19
- 238000010586 diagram Methods 0.000 description 18
- 238000003466 welding Methods 0.000 description 17
- 230000006870 function Effects 0.000 description 13
- 230000008602 contraction Effects 0.000 description 12
- 230000000694 effects Effects 0.000 description 11
- 229920000106 Liquid crystal polymer Polymers 0.000 description 8
- 239000004977 Liquid-crystal polymers (LCPs) Substances 0.000 description 8
- 230000002093 peripheral effect Effects 0.000 description 8
- 101100522110 Oryza sativa subsp. japonica PHT1-10 gene Proteins 0.000 description 6
- 101100522109 Pinus taeda PT10 gene Proteins 0.000 description 6
- 238000002788 crimping Methods 0.000 description 6
- 238000005476 soldering Methods 0.000 description 6
- 239000000057 synthetic resin Substances 0.000 description 5
- 229920003002 synthetic resin Polymers 0.000 description 5
- 229910000881 Cu alloy Inorganic materials 0.000 description 4
- 229910045601 alloy Inorganic materials 0.000 description 4
- 239000000956 alloy Substances 0.000 description 4
- IUYOGGFTLHZHEG-UHFFFAOYSA-N copper titanium Chemical compound [Ti].[Cu] IUYOGGFTLHZHEG-UHFFFAOYSA-N 0.000 description 4
- 238000001746 injection moulding Methods 0.000 description 4
- 239000013585 weight reducing agent Substances 0.000 description 3
- 229910000570 Cupronickel Inorganic materials 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- VRUVRQYVUDCDMT-UHFFFAOYSA-N [Sn].[Ni].[Cu] Chemical compound [Sn].[Ni].[Cu] VRUVRQYVUDCDMT-UHFFFAOYSA-N 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- YOCUPQPZWBBYIX-UHFFFAOYSA-N copper nickel Chemical compound [Ni].[Cu] YOCUPQPZWBBYIX-UHFFFAOYSA-N 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 229910000679 solder Inorganic materials 0.000 description 2
- 229910001299 Cm alloy Inorganic materials 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 239000013256 coordination polymer Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 231100000989 no adverse effect Toxicity 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
Images


















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B30/00—Camera modules comprising integrated lens units and imaging units, specially adapted for being embedded in other devices, e.g. mobile phones or vehicles
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
Abstract
モジュール駆動装置(101)は、固定側部材(FB)と、レンズ体(LS)及び撮像素子(IS)を有する光学モジュールを保持可能なモジュール保持体(2)と、レンズ体の光軸(OA)が傾くように固定側部材(FB)に対してモジュール保持体(2)を移動させる第1駆動部(DM1)と、光軸(OA)の周りに回転するように、固定側部材(FB)に対してモジュール保持体(2)を回転させる第2駆動部(DM2)と、を備える。第1駆動部(DM1)は、モジュール保持体(2)を含む可動側部材(MB)と固定側部材(FB)との間に設けられた複数の形状記憶合金ワイヤ(SA)を含んで構成され、第2駆動部(DM2)は、可動側部材(MB)と固定側部材(FB)との間に設けられた複数の形状記憶合金ワイヤ(SA)を含んで構成される。
Description
本開示は、モジュール駆動装置及び光学装置に関する。
従来、磁石及びコイルを含むボイスコイルモータによってカメラモジュールを移動させるように構成された撮影用光学装置(モジュール駆動装置)が知られている(特許文献1参照。)。
しかしながら、このモジュール駆動装置は、磁石及びコイルによる駆動のため、サイズが大きくなってしまうおそれがある。
そこで、より小さいサイズのモジュール駆動装置を提供することが望まれる。
本発明の一実施形態に係るモジュール駆動装置は、固定側部材と、レンズ体及び撮像素子を有する光学モジュールを保持可能なモジュール保持体と、前記レンズ体の光軸が傾くように、前記固定側部材に対して前記モジュール保持体を移動させる第1駆動部と、前記光軸の周りに回転するように、前記固定側部材に対して前記モジュール保持体を回転させる第2駆動部と、を備えたモジュール駆動装置であって、前記第1駆動部は、前記モジュール保持体を含む可動側部材と前記固定側部材との間に設けられた複数の形状記憶合金ワイヤを含んで構成され、前記第2駆動部は、前記可動側部材と前記固定側部材との間に設けられた複数の形状記憶合金ワイヤを含んで構成されている。
上述のモジュール駆動装置は、ボイスコイルモータを用いた装置よりも小さいサイズを実現できる。
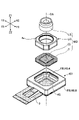
以下、本発明の実施形態に係るモジュール駆動装置101について図面を参照して説明する。図1A及び図1Bは、モジュール駆動装置101の斜視図である。具体的には、図1Aは、光学モジュールの一例であるカメラモジュールMDが取り付けられた状態のモジュール駆動装置101の上方斜視図であり、図1Bは、カメラモジュールMDが取り外された状態のモジュール駆動装置101の上方斜視図である。図2は、モジュール駆動装置101の分解斜視図である。本実施形態において、モジュール駆動装置101は、カメラモジュール駆動装置である。
図1A、図1B、及び図2において、X1は、三次元直交座標系を構成するX軸の一方向を表し、X2は、X軸の他方向を表す。また、Y1は、三次元直交座標系を構成するY軸の一方向を表し、Y2は、Y軸の他方向を表す。同様に、Z1は、三次元直交座標系を構成するZ軸の一方向を表し、Z2は、Z軸の他方向を表す。図1A、図1B、及び図2では、モジュール駆動装置101のX1側は、モジュール駆動装置101の前側(正面側)に相当し、モジュール駆動装置101のX2側は、モジュール駆動装置101の後側(背面側)に相当する。また、モジュール駆動装置101のY1側は、モジュール駆動装置101の左側に相当し、モジュール駆動装置101のY2側は、モジュール駆動装置101の右側に相当する。また、モジュール駆動装置101のZ1側は、モジュール駆動装置101の上側(被写体側)に相当し、モジュール駆動装置101のZ2側は、モジュール駆動装置101の下側(撮像素子側)に相当する。他の図においても同様である。
モジュール駆動装置101は、図1A、図1B、及び図2に示すように、固定側部材FBの一部であるカバー部材4を含む。
カバー部材4は、各部材を覆う筐体HSの一部として機能するように構成されている。本実施形態では、カバー部材4は、非磁性金属で形成されている。但し、カバー部材4は、磁性金属で形成されていてもよい。また、カバー部材4は、図1Bに示すように、収容部4Sを定める箱状の外形を有する。収容部4S内には、カメラモジュールMDが収容される。
カメラモジュールMDは、光学モジュールの一例であり、図1Bに示すように、回路基板7と、レンズ駆動装置LDと、レンズ駆動装置LDによって保持されるレンズ体LSと、レンズ体LSに対向するように回路基板7に実装された撮像素子ISとで構成されている。レンズ体LSと撮像素子ISとの間にIRカットフィルタが配置されていてもよい。本実施形態では、カメラモジュールMDは、形状記憶合金ワイヤ方式の駆動部を備えたカメラモジュールである。但し、カメラモジュールMDは、磁石及びコイルを含むボイスコイルモータ方式又は圧電方式等の他の方式の駆動部を備えたカメラモジュールであってもよい。また、回路基板7は、可撓性基板3を介して外部と接続されている。
具体的には、カメラモジュールMDの駆動部は、撮像素子ISのZ1側において、レンズ体LSの光軸方向であるZ軸方向に沿ってレンズ体LSを移動させることができるように構成されている。このようにレンズ体LSを移動させることにより、カメラモジュールMDは、レンズ調整機能の一つである自動焦点調整機能を実現できる。具体的には、カメラモジュールMDは、撮像素子ISから離れる方向にレンズ体LSを移動させてマクロ撮影を可能にし、撮像素子ISに近づく方向にレンズ体LSを移動させて無限遠撮影を可能にする。
カメラモジュールMDは、X軸方向及びY軸方向の少なくとも一方にレンズ体LSを移動させることができるように構成されていてもよい。このようにレンズ体LSを移動させることにより、カメラモジュールMDは、レンズ調整機能の別の一つである手振れ補正機能を実現してもよい。
図1Aは、カメラモジュールMDが中立状態(中立位置)にあるときのレンズ体LS及びレンズ駆動装置LDの状態を示す。レンズ駆動装置LDの筐体に対してレンズ体LSがZ軸方向に沿って並進可能であり、カメラモジュールMDの中立状態は、レンズ体LSがZ軸方向における移動可能範囲の中間に位置している状態を意味する。典型的には、カメラモジュールMDの中立状態では、レンズ体LSは、Z軸方向の移動可能範囲の中央に位置している状態にある。レンズ体LSがX軸方向に沿って並進可能な場合、及び、レンズ体LSがY軸方向に沿って並進可能な場合についても同様である。なお、駆動部に電力が供給されていないときのカメラモジュールMDの初期状態を中立状態としてもよい。また、典型的には、カメラモジュールMDの中立状態では、撮像素子ISの撮像面は、撮像素子ISに対向配置されるレンズ体LSの光軸OAと垂直な状態である。この場合、撮像素子IS(撮像面)の中心軸は、レンズ体の光軸OAに一致している。なお、撮像素子ISの撮像面は、撮像素子ISの被写体側の面である上面と平行な面である。
カメラモジュールMDは、固定焦点型カメラモジュールであってもよい。すなわち、レンズ体LSは、撮像素子ISに対して相対移動不能に配置されていてもよい。
図1Aに示す例では、カバー部材4は、矩形筒状の外周壁部4Aと、外周壁部4Aの上端(Z1側の端)と連続するように設けられた矩形環状且つ平板状の天板部4Bと、を有する。天板部4Bの中央には、八角形状の開口4Kが形成されている。外周壁部4Aは、第1側板部4A1~第4側板部4A4を含む。第1側板部4A1と第3側板部4A3とは互いに対向し、第2側板部4A2と第4側板部4A4とは互いに対向している。そして、第1側板部4A1及び第3側板部4A3は、第2側板部4A2及び第4側板部4A4に対して垂直に延びている。
カバー部材4は、図1Aに示すように、接着剤によってベース部材8に接合されている。ベース部材8は、カバー部材4とともに筐体HSを構成している。
筐体HS内には、図2に示すように、駆動部DM、カメラモジュールMD、モジュール保持体2、金属部材5、弾性金属部材6、及び回路基板7等が収容されている。また、筐体HSを構成しているベース部材8の下面(Z2側の面)には可撓性基板3が取り付けられている。なお、図1Bでは、明瞭化のため、撮像素子ISにはクロスパターンが付され、可撓性基板3には粗いドットパターンが付され、回路基板7には細かいドットパターンが付されている。
駆動部DMは、形状記憶アクチュエータの一例である形状記憶合金ワイヤSAを含む。本実施形態では、形状記憶合金ワイヤSAは、略同じ長さと略同じ直径を有する第1ワイヤSA1~第8ワイヤSA8を含む。形状記憶合金ワイヤSAは、電流が流れると温度が上昇し、その温度の上昇に応じて収縮する。駆動部DMは、形状記憶合金ワイヤSAの収縮を利用してモジュール保持体2を移動させることができる。なお、形状記憶合金ワイヤSAは、第1ワイヤSA1~第8ワイヤSA8のうちの一つ又は複数が収縮するとモジュール保持体2が移動し、その移動によって別の一つ又は複数が引き延ばされる(伸張される)ように構成されている。
本実施形態では、駆動部DMは、可動側部材MBの5自由度の動きを実現できるように構成されている。5自由度の動きは、光軸方向である第1方向(Z軸方向)に垂直な第2方向(X軸方向)における並進、第1方向及び第2方向に垂直な第3方向(Y軸方向)における並進、第1方向(Z軸方向)の周りの回転、第2方向(X軸方向)の周りの回転、並びに、第3方向(Y軸方向)の周りの回転を含む。なお、第1方向(Z軸方向)は、レンズ体LSの光軸OAと一致する第1回転軸RX1に平行な方向であり、第2方向(X軸方向)は、第2回転軸RX2に平行な方向であり、第3方向(Y軸方向)は、第3回転軸RX3に平行な方向である。第2回転軸RX2の軸線は、第1回転軸RX1の軸線と直交しており、第3回転軸RX3の軸線は、第1回転軸RX1の軸線と直交するとともに、第2回転軸RX2の軸線と直交している。すなわち、第1回転軸RX1、第2回転軸RX2、及び第3回転軸RX3は、それぞれ互いに直交する回転軸である。なお、光軸方向は、レンズ体LSに関する光軸OAの方向、及び、光軸OAに平行な方向を含む。また、第2回転軸RX2は第1揺動軸とも称され、第3回転軸RX3は第2揺動軸とも称される。
可撓性基板3は、モジュール駆動装置101とモジュール駆動装置101の外部にある装置とを接続するための配線パターンが形成された可撓性の基板である。本実施形態では、可撓性基板3は、繰り返し変形させることができるように構成されたフレキシブルプリント回路基板である。
回路基板7は、撮像素子ISが搭載される基板である。本実施形態では、回路基板7は、リジット回路基板である。
可動側部材MBは、駆動部DMによって駆動される部材である。本実施形態では、可動側部材MBは、カメラモジュールMDを保持可能なモジュール保持体2を含む。カメラモジュールMDは、可動側部材MBに含まれてもよい。
モジュール保持体2は、レンズ体LS及び撮像素子ISを有するカメラモジュールMDを保持できるように構成されている。そして、モジュール保持体2は、液晶ポリマー(LCP)等の合成樹脂を射出成形することで形成されている。具体的には、モジュール保持体2は、図2に示すように、上面視で略矩形の枠体2Fと、枠体2Fの四つの角部のうちの二つに形成された可動側台座部2Dと、枠体2Fの四つの角部のうちの残りの二つに形成された突設部2Sと、を含む。本実施形態では、カメラモジュールMDは、枠体2Fの内面に接着剤で接合されるように構成されている。なお、枠体2FとカメラモジュールMDとの間には、カメラモジュールMDを収容可能なケース又はカバー等の他の部材が配置されていてもよい。この場合、ケース又はカバー等の他の部材は、金属製であってもよく、合成樹脂製であってもよい。また、モジュール保持体2は、カメラモジュールMDの一部を構成していてもよい。例えば、モジュール保持体2は、カメラモジュールMDの筐体に一体化されていてもよい。カメラモジュールMDの筐体は、例えば、カバー部材4xである。
可動側台座部2Dは、第1可動側台座部2D1及び第2可動側台座部2D2を含む。第1可動側台座部2D1及び第2可動側台座部2D2は、第1回転軸RX1(光軸OA)を挟んで互いに対向するように配置されている。同様に、突設部2Sは、第1突設部2S1及び第2突設部2S2を含む。第1突設部2S1及び第2突設部2S2は、第1回転軸RX1を挟んで互いに対向するように配置されている。具体的には、可動側台座部2D及び突設部2Sは、上面視で略矩形状の外形を有するモジュール保持体2(枠体2F)の四つの角部に対応するように配置され、且つ、交互に並ぶように配置されている。そして、二つの可動側台座部2Dのそれぞれには、図3に示すように、弾性金属部材6の一部が載置される。
図3は、モジュール保持体2とベース部材8とに接続された弾性金属部材6の斜視図であり、モジュール保持体2及びベース部材8のそれぞれと弾性金属部材6との間の位置関係を示している。なお、図3では、明瞭化のため、モジュール保持体2に細かいドットパターンが付され、ベース部材8に粗いドットパターンが付されている。また、図3では、明瞭化のため、モジュール保持体2、弾性金属部材6、及びベース部材8以外の部材の図示が省略されている。
弾性金属部材6は、固定側部材FB(ベース部材8)に対してモジュール保持体2を移動可能に支持できるように構成されている。本実施形態では、弾性金属部材6は、例えば、銅合金、チタン銅系合金(チタン銅)、又は銅ニッケル合金(ニッケルすず銅)等を主な材料とした導電性の金属板から作製されている。
ベース部材8は、液晶ポリマー(LCP)等の合成樹脂を用いた射出成形によって形成される。本実施形態では、ベース部材8は、図2に示すように、上面視で略矩形状の輪郭を有し、中央に開口8Kを有する。具体的には、ベース部材8は、開口8Kを囲むように配置される四つの辺部8E(第1辺部8E1~第4辺部8E4)を有する。
具体的には、ベース部材8は、図2に示すように、ベース部材8の四つの角部のうちの二つに形成された固定側台座部8Dを含む。固定側台座部8Dは、ベース部材8の板状の基部から上方(Z1方向)に突出している。そして、固定側台座部8Dは、第1固定側台座部8D1及び第2固定側台座部8D2を含む。第1固定側台座部8D1及び第2固定側台座部8D2は、第1回転軸RX1を挟んで互いに対向するように配置されている。また、図3に示すように、Z軸を中心とする径方向において、第1固定側台座部8D1は、モジュール保持体2の第1突設部2S1と対向するように配置され、第2固定側台座部8D2は、モジュール保持体2の第2突設部2S2と対向するように配置されている。
弾性金属部材6は、モジュール保持体2に形成された可動側台座部2Dと、ベース部材8に形成された固定側台座部8Dとを繋ぐように構成されている。具体的には、弾性金属部材6は、図3に示すように、ベース部材8に形成された第1固定側台座部8D1に取り付けられる第1固定部6e1と、モジュール保持体2に形成された第1可動側台座部2D1に取り付けられる第2固定部6e2と、ベース部材8に形成された第2固定側台座部8D2に取り付けられる第3固定部6e3と、モジュール保持体2に形成された第2可動側台座部2D2に取り付けられる第4固定部6e4と、を有する。また、弾性金属部材6は、図3に示すように、第1固定部6e1と第2固定部6e2とを繋ぐ弾性変形可能な第1腕部6g1、第2固定部6e2と第3固定部6e3とを繋ぐ弾性変形可能な第2腕部6g2、第3固定部6e3と第4固定部6e4とを繋ぐ弾性変形可能な第3腕部6g3、及び、第4固定部6e4と第1固定部6e1とを繋ぐ弾性変形可能な第4腕部6g4を有する。
金属部材5は、形状記憶合金ワイヤSAの端部が固定されるように構成されている。本実施形態では、金属部材5は、図2に示すように、固定側金属部材5F及び可動側金属部材5Mを含む。固定側金属部材5Fは、ベース部材8の固定側台座部8Dに固定されるように構成されている。可動側金属部材5Mは、モジュール保持体2の可動側台座部2Dに固定されるように構成されている。
より具体的には、固定側金属部材5Fは、固定側ターミナルプレートとも称され、第1固定側ターミナルプレート5F1~第8固定側ターミナルプレート5F8を含む。可動側金属部材5Mは、可動側ターミナルプレートとも称され、第1可動側ターミナルプレート5M1及び第2可動側ターミナルプレート5M2を含む。
次に、図4A及び図4Bを参照し、モジュール保持体2及びベース部材8のそれぞれと金属部材5との間の位置関係について説明する。図4Aは、可動側金属部材5M(可動側ターミナルプレート)が取り付けられたモジュール保持体2の斜視図である。図4Bは、固定側金属部材5F(固定側ターミナルプレート)が取り付けられたベース部材8の斜視図である。なお、明瞭化のため、図4Aでは、可動側金属部材5Mにドットパターンが付され、図4Bでは、固定側金属部材5Fにドットパターンが付されている。
図4Aに示す例では、第1可動側ターミナルプレート5M1は、第1可動側台座部2D1のX1側の側壁(前側取付面)及びY1側の側壁(左側取付面)に固定されている。具体的には、第1可動側台座部2D1の上面に形成された溝部2G(図2参照。)と第1可動側ターミナルプレート5M1に形成された折り曲げ片BPとがかみ合った状態で、第1可動側ターミナルプレート5M1は、接着剤により第1可動側台座部2D1に固定されている。接着剤は、例えば、光硬化型接着剤である。光硬化型接着剤は、例えば、紫外線硬化型接着剤又は可視光硬化型接着剤等である。同様に、第2可動側ターミナルプレート5M2は、第2可動側台座部2D2のX2側の側壁(後側取付面)及びY2側の側壁(右側取付面)に固定されている。具体的には、第2可動側台座部2D2の上面に形成された溝部2G(図2参照。)と第2可動側ターミナルプレート5M2に形成された折り曲げ片BPとがかみ合った状態で、第2可動側ターミナルプレート5M2は、接着剤により第2可動側台座部2D2に固定されている。
図4Bに示す例では、第1固定側ターミナルプレート5F1及び第2固定側ターミナルプレート5F2は、ベース部材8の第1辺部8E1に沿って配置された第1固定側台座部8D1のX1側の側壁(前側取付面)に固定されている。具体的には、第1固定側ターミナルプレート5F1及び第2固定側ターミナルプレート5F2は、接着剤により第1固定側台座部8D1に固定されている。接着剤は、例えば、光硬化型接着剤である。光硬化型接着剤は、例えば、紫外線硬化型接着剤又は可視光硬化型接着剤等である。同様に、第3固定側ターミナルプレート5F3及び第4固定側ターミナルプレート5F4(図4Bでは不可視。)は、ベース部材8の第2辺部8E2に沿って配置された第2固定側台座部8D2のY1側の側壁(左側取付面)に固定されている。また、第5固定側ターミナルプレート5F5及び第6固定側ターミナルプレート5F6(図4Bでは不可視。)は、ベース部材8の第3辺部8E3に沿って配置された第2固定側台座部8D2のX2側の側壁(後側取付面)に固定されている。そして、第7固定側ターミナルプレート5F7及び第8固定側ターミナルプレート5F8は、ベース部材8の第4辺部8E4に沿って配置された第1固定側台座部8D1のY2側の側壁(右側取付面)に固定されている。
形状記憶合金ワイヤSAは、カバー部材4の外周壁部4Aの内面に沿うように延びており、固定側部材FBに対して可動側部材MBを移動可能に支持できるように構成されている。本実施形態では、形状記憶合金ワイヤSAは、図2に示すように、第1ワイヤSA1~第8ワイヤSA8を含み、固定側部材FBとしてのベース部材8に対して、可動側部材MBとしてのモジュール保持体2を移動可能に支持できるように構成されている。具体的には、第1ワイヤSA1~第8ワイヤSA8のそれぞれは、図2に示すように、一端が圧着又は溶接等により固定側金属部材5Fに固着され、且つ、他端が圧着又は溶接等により可動側金属部材5Mに固着されている。
次に、図5A及び図5Bを参照し、形状記憶合金ワイヤSAが取り付けられる金属部材5について説明する。図5Aは、第2可動側ターミナルプレート5M2及び第7固定側ターミナルプレート5F7のそれぞれに取り付けられた第7ワイヤSA7、並びに、第2可動側ターミナルプレート5M2及び第8固定側ターミナルプレート5F8のそれぞれに取り付けられた第8ワイヤSA8をY2側(右側)から見たときの図である。図5Bは、第2可動側ターミナルプレート5M2及び第7固定側ターミナルプレート5F7のそれぞれに取り付けられた第7ワイヤSA7、並びに、第2可動側ターミナルプレート5M2及び第8固定側ターミナルプレート5F8のそれぞれに取り付けられた第8ワイヤSA8をX1側(前側)から見たときの図である。なお、図5A及び図5Bに示す各部材の位置関係は、モジュール駆動装置101が組み立てられたときの位置関係に対応している。そして、図5A及び図5Bでは、明瞭化のため、他の部材の図示が省略されている。また、図5A及び図5Bを参照する以下の説明は、第7ワイヤSA7及び第8ワイヤSA8の組み合わせに関するが、第1ワイヤSA1及び第2ワイヤSA2の組み合わせ、第3ワイヤSA3及び第4ワイヤSA4の組み合わせ、並びに、第5ワイヤSA5及び第6ワイヤSA6の組み合わせについても同様に適用される。
具体的には、第7ワイヤSA7の一端は、第7固定側ターミナルプレート5F7の保持部J2のところで第7固定側ターミナルプレート5F7に固定され、第7ワイヤSA7の他端は、第2可動側ターミナルプレート5M2の下側の保持部J1のところで第2可動側ターミナルプレート5M2に固定されている。同様に、第8ワイヤSA8の一端は、第8固定側ターミナルプレート5F8の保持部J4のところで第8固定側ターミナルプレート5F8に固定され、第8ワイヤSA8の他端は、第2可動側ターミナルプレート5M2の上側の保持部J3のところで第2可動側ターミナルプレート5M2に固定されている。
保持部J1は、第2可動側ターミナルプレート5M2の一部を折り曲げることによって形成されている。具体的には、第2可動側ターミナルプレート5M2の一部は、第7ワイヤSA7の端部(他端)を挟み込んだ状態で折り曲げられることにより保持部J1を形成している。そして、第7ワイヤSA7の端部(他端)は、溶接によって保持部J1に固定されている。保持部J2~保持部J4についても同様である。
第7ワイヤSA7及び第8ワイヤSA8は、図5Aに示すように、互いにねじれの位置となるように(Y2側から見たときに立体的に交差するように)配置されている。すなわち、第7ワイヤSA7及び第8ワイヤSA8は、互いに接触しない(非接触となる)ように配置されている。
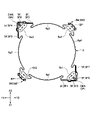
次に、図6を参照し、固定側部材FBの一部であるベース部材8の詳細について説明する。図6は、ベース部材8の斜視図である。具体的には、図6の上図は、導電部材CMが取り除かれた状態のベース部材8の斜視図であり、図6の中央図は、ベース部材8内に埋設されている導電部材CMの斜視図であり、図6の下図は、導電部材CMが埋設された状態のベース部材8の斜視図である。なお、図6の中央図及び図6の下図では、明瞭化のため、導電部材CMにドットパターンが付されている。
ベース部材8は、第1ワイヤSA1~第8ワイヤSA8のそれぞれの一端を支持する固定側ワイヤ支持部として機能するように構成されている。また、モジュール保持体2は、第1ワイヤSA1~第8ワイヤSA8のそれぞれの他端を支持する可動側ワイヤ支持部として機能するように構成されている。この構成により、可動側部材MBは、第1ワイヤSA1~第8ワイヤSA8によって固定側部材FBに対して5自由度で移動可能な状態で支持されている。
ベース部材8の被写体側の面(Z1側の面)である上面には、上述のように、固定側台座部8Dが形成されている。固定側台座部8Dは、第1固定側台座部8D1及び第2固定側台座部8D2を含む。第1固定側台座部8D1及び第2固定側台座部8D2は、第1回転軸RX1を挟んで対向するように配置されている。
ベース部材8には、図6の中央図に示すような、銅、鉄、又はそれらを主成分とする合金等の材料を含む金属板から形成された導電部材CMがインサート成形によって埋め込まれている。本実施形態では、導電部材CMは、ベース部材8の下面(Z2側の面)に露出して外方に延びる接続部EDと、ベース部材8の固定側台座部8Dの上面(Z1側の面)に露出する接合面部CPと、を有するように構成されている。
具体的には、導電部材CMは、第1導電部材CM1及び第2導電部材CM2を含む。そして、第1導電部材CM1は、第1接続部ED1及び第1接合面部CP1を含み、第2導電部材CM2は、第2接続部ED2及び第2接合面部CP2を含む。
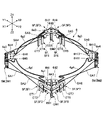
次に、図7A及び図7Bを参照し、金属部材5、弾性金属部材6、導電部材CM、及び形状記憶合金ワイヤSAの位置関係について説明する。図7A及び図7Bは、金属部材5、弾性金属部材6、導電部材CM、及び形状記憶合金ワイヤSAの位置関係を示す図である。具体的には、図7Aは、各部材(金属部材5、弾性金属部材6、導電部材CM、及び形状記憶合金ワイヤSA)の斜視図であり、図7Bは、各部材の上面図である。なお、図7A及び図7Bでは、明瞭化のため、可動側金属部材5M及び導電部材CMにドットパターンが付されている。また、図7Bでは、明瞭化のため、形状記憶合金ワイヤSAの図示が省略されている。
弾性金属部材6は、図3に示すように、ベース部材8の第1固定側台座部8D1(図2参照。)に固定される第1固定部6e1と、モジュール保持体2の第1可動側台座部2D1(図2参照。)に固定される第2固定部6e2と、ベース部材8の第2固定側台座部8D2(図2参照。)に固定される第3固定部6e3と、モジュール保持体2の第2可動側台座部2D2(図2参照。)に固定される第4固定部6e4と、第1固定部6e1と第2固定部6e2を繋ぐ第1腕部6g1と、第2固定部6e2と第3固定部6e3を繋ぐ第2腕部6g2と、第3固定部6e3と第4固定部6e4を繋ぐ第3腕部6g3と、第4固定部6e4と第1固定部6e1を繋ぐ第4腕部6g4と、を有する。
第1固定部6e1には、第1固定側台座部8D1に形成された上側に突出する円柱状の突出部8T(図4B参照。)が挿通される第1貫通孔6H1及び第2貫通孔6H2と、第1導電部材CM1の第1接合面部CP1(図6の下図参照。)との接合に用いられる第3貫通孔6H3とが形成されている。本実施形態では、弾性金属部材6と突出部8Tとの固定は、突出部8Tに熱かしめ又は冷間かしめを施すことによって実現される。但し、弾性金属部材6と突出部8Tとの固定は、接着剤によって実現されてもよい。また、本実施形態では、弾性金属部材6と第1導電部材CM1との接合は、レーザ溶接等の溶接によって実現される。但し、弾性金属部材6と第1導電部材CM1との接合は、半田又は導電性接着剤等によって実現されてもよい。
第2固定部6e2には、第1可動側台座部2D1に形成された上側に突出する円柱状の突出部2T(図4A参照。)が挿通される第4貫通孔6H4及び第5貫通孔6H5と、第1可動側ターミナルプレート5M1の折り曲げ片BP(図4A参照。)の先端との接合に用いられる第6貫通孔6H6とが形成されている。本実施形態では、弾性金属部材6と突出部2Tの固定は、突出部2Tに熱かしめ又は冷間かしめを施すことによって実現される。但し、弾性金属部材6と突出部2Tとの固定は、接着剤によって実現されてもよい。また、本実施形態では、弾性金属部材6と第1可動側ターミナルプレート5M1の折り曲げ片BPとの接合は、レーザ溶接等の溶接によって実現される。但し、弾性金属部材6と折り曲げ片BPとの接合は、半田又は導電性接着剤等によって実現されてもよい。
同様に、第3固定部6e3には、第2固定側台座部8D2に形成された上側に突出する円柱状の突出部8T(図4B参照。)が挿通される第7貫通孔6H7及び第8貫通孔6H8と、第2導電部材CM2の第2接合面部CP2(図6の下図参照。)との接合に用いられる第9貫通孔6H9とが形成されている。
また、第4固定部6e4には、第2可動側台座部2D2に形成された上側に突出する円柱状の突出部2T(図4A参照。)が挿通される第10貫通孔6H10及び第11貫通孔6H11と、第2可動側ターミナルプレート5M2の折り曲げ片BP(図4A参照。)の先端との接合に用いられる第12貫通孔6H12とが形成されている。
なお、弾性金属部材6の第1腕部6g1~第4腕部6g4のそれぞれは、四つの湾曲部を有する弾性変形可能な腕部である。そのため、モジュール保持体2は、ベース部材8(固定側部材FB)に対して、第1回転軸RX1に平行な方向のみならず、第1回転軸RX1と交差する方向にも移動可能となっている。
図7Bに示すように、弾性金属部材6は、第1回転軸RX1に対して2回回転対称となるように構成されている。そのため、弾性金属部材6は、モジュール保持体2の重量バランスに悪影響を及ぼすことはほとんどない。また、弾性金属部材6は、八本の形状記憶合金ワイヤSA(第1ワイヤSA1~第8ワイヤSA8)によって支持される可動側部材MBの重量バランスに悪影響を及ぼすこともほとんどない。
固定側金属部材5Fは、接続部CT(図5A及び図5B参照。)を有し、接続部CTを介し、可撓性基板3の導電パターンPTに接合されるように構成されている。本実施形態では、接続部CTは、第1接続部CT1~第8接続部CT8を含む。
可撓性基板3は、図2に示すように、回路基板7の下面に取り付けられる略矩形状の内側部分3iと、ベース部材8の下面に取り付けられる略矩形環状の外側部分3eと、を含む。外側部分3eには、第1導電パターンPT1~第10導電パターンPT10が形成され、内側部分3iには、撮像素子ISを実装した回路基板7との接続に用いられる多数の導電パターン(図示せず。)が形成されている。なお、内側部分3iと外側部分3eとの間には、略U字状のスリット(開口)が形成されており、内側部分3iの動きが妨げられないように構成されている。
具体的には、第1固定側ターミナルプレート5F1の第1接続部CT1は、半田付けによって可撓性基板3の第1導電パターンPT1(図2参照。)に接合される。同様に、第2固定側ターミナルプレート5F2の第2接続部CT2は、半田付けによって可撓性基板3の第2導電パターンPT2(図2参照。)に接合され、第3固定側ターミナルプレート5F3の第3接続部CT3は、半田付けによって可撓性基板3の第3導電パターンPT3(図2参照。)に接合され、第4固定側ターミナルプレート5F4の第4接続部CT4は、半田付けによって可撓性基板3の第4導電パターンPT4(図2参照。)に接合され、第5固定側ターミナルプレート5F5の第5接続部CT5は、半田付けによって可撓性基板3の第5導電パターンPT5(図2参照。)に接合され、第6固定側ターミナルプレート5F6の第6接続部CT6は、半田付けによって可撓性基板3の第6導電パターンPT6(図2参照。)に接合され、第7固定側ターミナルプレート5F7の第7接続部CT7は、半田付けによって可撓性基板3の第7導電パターンPT7(図2参照。)に接合され、第8固定側ターミナルプレート5F8の第8接続部CT8は、半田付けによって可撓性基板3の第8導電パターンPT8(図2参照。)に接合される。なお、接続部CTと可撓性基板3の導電パターンPTとの接合は、導電性接着剤によって実現されてもよい。
第1導電部材CM1の第1接続部ED1は、半田付けによって可撓性基板3の第9導電パターンPT9(図2参照。)に接合され、第2導電部材CM2の第2接続部ED2は、半田付けによって可撓性基板3の第10導電パターンPT10(図2参照。)に接合される。本実施形態では、第9導電パターンPT9及び第10導電パターンPT10は何れも接地端子(図示せず。)に接続されている。なお、接続部EDと可撓性基板3の導電パターンPTとの接合は、導電性接着剤によって実現されてもよい。
第1可動側ターミナルプレート5M1の折り曲げ片BPは、図7Bに示すように、レーザ溶接等の溶接によって弾性金属部材6の第2固定部6e2に接合される。同様に、第2可動側ターミナルプレート5M2の折り曲げ片BPは、レーザ溶接等の溶接によって弾性金属部材6の第4固定部6e4に接合される。
第1固定側ターミナルプレート5F1、第2固定側ターミナルプレート5F2、第7固定側ターミナルプレート5F7、及び第8固定側ターミナルプレート5F8は、図7Bに示すように、弾性金属部材6の第1固定部6e1から離間して配置されており、弾性金属部材6の第1固定部6e1には接触していない。一方で、弾性金属部材6の第1固定部6e1は、図7Bに示すように、レーザ溶接等の溶接によって第1導電部材CM1の第1接合面部CP1に接合されている。同様に、第3固定側ターミナルプレート5F3~第6固定側ターミナルプレート5F6は、図7Bに示すように、弾性金属部材6の第3固定部6e3から離間して配置されており、弾性金属部材6の第3固定部6e3には接触していない。一方で、弾性金属部材6の第3固定部6e3は、図7Bに示すように、レーザ溶接等の溶接によって第2導電部材CM2の第2接合面部CP2に接合されている。
次に、図8A及び図8Bを参照し、形状記憶合金ワイヤSAを流れる電流の経路について説明する。図8A及び図8Bは、図7Aに示す構成の一部の斜視図である。なお、図8A及び図8Bでは、明瞭化のため、第1導電部材CM1及び第2可動側ターミナルプレート5M2には粗いドットパターンが付され、第7固定側ターミナルプレート5F7及び第8固定側ターミナルプレート5F8には細かいドットパターンが付され、弾性金属部材6には更に細かいドットパターンが付されている。
具体的には、図8Aは、第7固定側ターミナルプレート5F7の第7接続部CT7が高電位に接続され、且つ、第1導電部材CM1の第1接続部ED1が低電位に接続されたときの電流の経路を示し、図8Bは、第8固定側ターミナルプレート5F8の第8接続部CT8が高電位に接続され、且つ、第1導電部材CM1の第1接続部ED1が低電位に接続されたときの電流の経路を示す。以下の説明は、第7ワイヤSA7又は第8ワイヤSA8を流れる電流の経路に関するが、第1ワイヤSA1又は第2ワイヤSA2を流れる電流の経路、第3ワイヤSA3又は第4ワイヤSA4を流れる電流の経路、及び、第5ワイヤSA5又は第6ワイヤSA6を流れる電流の経路についても同様に適用される。
第7固定側ターミナルプレート5F7の第7接続部CT7が高電位に接続され、且つ、第1導電部材CM1の第1接続部ED1が低電位に接続されると、電流は、図8Aの矢印AR1で示すように第7接続部CT7を通って第7固定側ターミナルプレート5F7に流れる。その後、電流は、矢印AR2で示すように第7固定側ターミナルプレート5F7を通り、矢印AR3で示すように第7ワイヤSA7を通り、更に、矢印AR4で示すように第2可動側ターミナルプレート5M2を通る。その後、電流は、矢印AR5、矢印AR6、及び矢印AR7で示すように弾性金属部材6の第4固定部6e4、第4腕部6g4、及び第1固定部6e1を通り、そして、矢印AR8で示すように第1導電部材CM1を通って第1接続部ED1に流れる。
なお、本実施形態では、電流は、弾性金属部材6の第4固定部6e4、第3腕部6g3、第3固定部6e3、第2導電部材CM2を通って第2接続部ED2にも流れるように構成されている。第1導電部材CM1の第1接続部ED1と第2導電部材CM2の第2接続部ED2とは何れも接地されているためである。
第8固定側ターミナルプレート5F8の第8接続部CT8が高電位に接続され、且つ、第1導電部材CM1の第1接続部ED1が低電位に接続されると、電流は、図8Bの矢印AR11で示すように第8接続部CT8を通って第8固定側ターミナルプレート5F8に流れる。その後、電流は、矢印AR12で示すように第8固定側ターミナルプレート5F8を通り、矢印AR13で示すように第8ワイヤSA8を通り、更に、矢印AR14で示すように第2可動側ターミナルプレート5M2を通る。その後、電流は、矢印AR15、矢印AR16、及び矢印AR17で示すように弾性金属部材6の第4固定部6e4、第4腕部6g4、及び第1固定部6e1を通り、そして、矢印AR18で示すように第1導電部材CM1を通って第1接続部ED1に流れる。
なお、本実施形態では、電流は、弾性金属部材6の第4固定部6e4、第3腕部6g3、第3固定部6e3、第2導電部材CM2を通って第2接続部ED2にも流れるように構成されている。第1導電部材CM1の第1接続部ED1と第2導電部材CM2の第2接続部ED2とは何れも接地されているためである。
また、第7固定側ターミナルプレート5F7の第7接続部CT7が高電位に接続された場合、及び、第8固定側ターミナルプレート5F8の第8接続部CT8が高電位に接続された場合の何れにおいても、第2可動側ターミナルプレート5M2を通過した後の電流の経路は同じである。
上述のようなモジュール駆動装置101の外部にある制御装置は、第1固定側ターミナルプレート5F1~第8固定側ターミナルプレート5F8のそれぞれの接続部CTに印加される電圧を制御することにより、第1ワイヤSA1~第8ワイヤSA8のそれぞれの伸縮を制御できる。或いは、制御装置は、第1固定側ターミナルプレート5F1~第8固定側ターミナルプレート5F8のそれぞれの接続部CTと第1導電部材CM1及び第2導電部材CM2のそれぞれの接続部EDとを介して第1ワイヤSA1~第8ワイヤSA8のそれぞれに供給される電流を制御することにより、第1ワイヤSA1~第8ワイヤSA8のそれぞれの伸縮を制御できる。なお、制御装置は、モジュール駆動装置101内に配置されていてもよい。また、制御装置は、モジュール駆動装置101の構成要素であってもよい。
制御装置は、複数の形状記憶合金ワイヤSAに流れる電流を制御することによって、第1方向(光軸方向)と交差する方向にモジュール保持体2を移動させてもよい。第1方向と交差する方向は、例えば、第1方向に垂直な第2方向(X軸方向)、又は、第1方向及び第2方向に垂直な第3方向(Y軸方向)であってもよい。また、制御装置は、第1方向(Z軸方向)の周り、第2方向(X軸方向)の周り、又は、第3方向(Y軸方向)の周りでモジュール保持体2を回転させてもよい。このようなモジュール保持体2の動きにより、制御装置は、手振れ補正機能を実現してもよい。
次に、図9~図15を参照し、駆動部DMの詳細について説明する。図9は、モジュール保持体2の5自由度の動きのそれぞれを実現する際の形状記憶合金ワイヤSAの伸縮状態を示す表である。図10は、形状記憶合金ワイヤSAによって連結されたモジュール保持体2とベース部材8の上面図、正面図、背面図、左側面図、及び右側面図である。図11は、ベース部材8に対してX軸方向に並進するモジュール保持体2とベース部材8の上面図である。図12は、ベース部材8に対してY軸方向に並進するモジュール保持体2とベース部材8の上面図である。図13は、X軸(第2回転軸RX2)の周りで回転するモジュール保持体2とベース部材8の正面図である。図14は、Y軸(第3回転軸RX3)の周りで回転するモジュール保持体2とベース部材8の右側面図である。図15は、Z軸(第1回転軸RX1)の周りで回転するモジュール保持体2とベース部材8の上面図である。なお、図10~図15では、明瞭化のため、モジュール保持体2に細かいドットパターンが付され、ベース部材8に粗いドットパターンが付されている。
図10は、モジュール駆動装置101が中立状態(中立位置)にあるときのモジュール保持体2、ベース部材8、及び形状記憶合金ワイヤSAの状態を示す。なお、モジュール駆動装置101の中立状態は、固定側部材FBに対して、X軸及びY軸のそれぞれの方向に沿って並進可能なモジュール保持体2がX軸方向における移動可能範囲の中間に位置し、且つ、Y軸方向における移動可能範囲の中間に位置している状態を意味する。典型的には、モジュール駆動装置101の中立状態では、モジュール保持体2は、X軸方向及びY軸方向におけるそれぞれの移動可能範囲の中央に位置している状態にある。また、モジュール駆動装置101の中立状態は、X軸(第2回転軸RX2)の周り、Y軸(第3回転軸RX3)の周り、及び、Z軸(第1回転軸RX1)の周りにそれぞれ回転可能(揺動可能)なモジュール保持体2がそれぞれの回転軸周りの回転可能範囲(回転可能角度)の中間に位置している状態を意味する。典型的には、モジュール駆動装置101の中立状態では、モジュール保持体2は、第1回転軸RX1~第3回転軸RX3におけるそれぞれの回転軸周りの回転可能範囲の中央に位置している。なお、形状記憶合金ワイヤSAに電流が供給されていないときのモジュール駆動装置101の初期状態を中立状態としてもよい。
具体的には、モジュール駆動装置101が中立状態にあるとき、第2ワイヤSA2は、Z1側から見た上面視において、その一端(固定端)がその他端(可動端)よりも所定距離D1だけ外側(前側(X1側))に位置するように配置されている。なお、第2ワイヤSA2の一端(固定端)は、第2固定側ターミナルプレート5F2に固定される端部であり、第2ワイヤSA2の他端(可動端)は、第1可動側ターミナルプレート5M1に固定される端部である。
また、上面視において、第4ワイヤSA4は、その一端(固定端)がその他端(可動端)よりも所定距離D2だけ外側(左側(Y1側))に位置するように配置され、第6ワイヤSA6は、その一端(固定端)がその他端(可動端)よりも所定距離D3だけ外側(後側(X2側))に位置するように配置され、第8ワイヤSA8は、その一端(固定端)がその他端(可動端)よりも所定距離D4だけ外側(右側(Y2側))に位置するように配置されている。第1ワイヤSA1、第3ワイヤSA3、第5ワイヤSA5、及び第7ワイヤSA7についても同様である。
すなわち、上面視において、第1ワイヤSA1、第2ワイヤSA2、第5ワイヤSA5、及び第6ワイヤSA6は、Y軸に対して非平行となるように配置され、第3ワイヤSA3、第4ワイヤSA4、第7ワイヤSA7、及び第8ワイヤSA8は、X軸に対して非平行となるように配置されている。
このような配置により、制御装置は、例えば、第1ワイヤSA1~第8ワイヤSA8の一部を収縮させ、且つ、残りを伸張させることにより、モジュール保持体2をX軸又はY軸に沿って並進させることができる。
また、モジュール駆動装置101が中立状態にあるとき、X1側から見た正面視において、第1ワイヤSA1は、その一端(固定端)がその他端(可動端)よりも高い位置となるように配置され、第2ワイヤSA2は、その一端(固定端)がその他端(可動端)よりも低い位置となるように配置され、更に、第1ワイヤSA1と第2ワイヤSA2とは交差するように配置されている。
また、Y1側から見た左側面視において、第3ワイヤSA3は、その一端(固定端)がその他端(可動端)よりも高い位置となるように配置され、第4ワイヤSA4は、その一端(固定端)がその他端(可動端)よりも低い位置となるように配置され、更に、第3ワイヤSA3と第4ワイヤSA4とは交差するように配置されている。
また、X2側から見た背面視において、第5ワイヤSA5は、その一端(固定端)がその他端(可動端)よりも高い位置となるように配置され、第6ワイヤSA6は、その一端(固定端)がその他端(可動端)よりも低い位置となるように配置され、更に、第5ワイヤSA5と第6ワイヤSA6とは交差するように配置されている。
同様に、Y2側から見た右側面視において、第7ワイヤSA7は、その一端(固定端)がその他端(可動端)よりも高い位置となるように配置され、第8ワイヤSA8は、その一端(固定端)がその他端(可動端)よりも低い位置となるように配置され、更に、第7ワイヤSA7と第8ワイヤSA8とは交差するように配置されている。
すなわち、側面視において、第1ワイヤSA1~第8ワイヤSA8は何れも、X軸及びY軸に対して斜めに(非平行に)延びるように配置されている。
但し、第1ワイヤSA1と第2ワイヤSA2は、正面視において斜めに延びるように配置されていればよく、正面視において互いに交差している必要はない。第3ワイヤSA3と第4ワイヤSA4との関係、第5ワイヤSA5と第6ワイヤSA6との関係、及び、第7ワイヤSA7と第8ワイヤSA8との関係においても同様である。
図11の上図は、ベース部材8に対してX1方向(前方)に並進するモジュール保持体2とベース部材8の上面図であり、図11の中央図は、中立状態におけるモジュール保持体2とベース部材8の上面図であり、図11の下図は、ベース部材8に対してX2方向(後方)に並進するモジュール保持体2とベース部材8の上面図である。
制御装置は、ベース部材8に対してX1方向(前方)にモジュール保持体2を並進させる場合、図9の表に示すように、第1ワイヤSA1及び第2ワイヤSA2を比較的小さく収縮させ、第3ワイヤSA3及び第4ワイヤSA4を比較的大きく伸張させ、第5ワイヤSA5及び第6ワイヤSA6を比較的小さく伸張させ、且つ、第7ワイヤSA7及び第8ワイヤSA8を比較的大きく収縮させる。第1ワイヤSA1及び第2ワイヤSA2を比較的小さく収縮させ、且つ、第7ワイヤSA7及び第8ワイヤSA8を比較的大きく収縮させることは、第1ワイヤSA1及び第2ワイヤSA2のそれぞれの収縮量が第7ワイヤSA7及び第8ワイヤSA8のそれぞれの収縮量よりも小さいことを意味する。また、第3ワイヤSA3及び第4ワイヤSA4を比較的大きく伸張させ、且つ、第5ワイヤSA5及び第6ワイヤSA6を比較的小さく伸張させることは、第3ワイヤSA3及び第4ワイヤSA4のそれぞれの伸張量が第5ワイヤSA5及び第6ワイヤSA6のそれぞれの伸張量よりも大きいことを意味する。また、本実施形態では、制御装置は、第1ワイヤSA1及び第2ワイヤSA2を略同じ収縮量で比較的小さく収縮させ、第3ワイヤSA3及び第4ワイヤSA4を略同じ伸張量で比較的大きく伸張させ、第5ワイヤSA5及び第6ワイヤSA6を略同じ伸張量で比較的小さく伸張させ、且つ、第7ワイヤSA7及び第8ワイヤSA8を略同じ収縮量で比較的大きく収縮させている。以下の説明においても同様である。制御装置は、第1ワイヤSA1~第8ワイヤSA8のそれぞれに供給される電流の大きさを個別に調整することによって第1ワイヤSA1~第8ワイヤSA8のそれぞれを上述のように伸縮させる。この制御装置による制御により、駆動部DMは、図11の上図の矢印AR21で示すように、ベース部材8に対してX1方向(前方)にモジュール保持体2を並進させることができる。
同様に、制御装置は、ベース部材8に対してX2方向(後方)にモジュール保持体2を並進させる場合、図9の表に示すように、第1ワイヤSA1及び第2ワイヤSA2を比較的小さく伸張させ、第3ワイヤSA3及び第4ワイヤSA4を比較的大きく収縮させ、第5ワイヤSA5及び第6ワイヤSA6を比較的小さく収縮させ、且つ、第7ワイヤSA7及び第8ワイヤSA8を比較的大きく伸張させる。制御装置は、第1ワイヤSA1~第8ワイヤSA8のそれぞれに供給される電流の大きさを個別に調整することによって第1ワイヤSA1~第8ワイヤSA8のそれぞれを上述のように伸縮させる。この制御装置による制御により、駆動部DMは、図11の下図の矢印AR22で示すように、ベース部材8に対してX2方向(後方)にモジュール保持体2を並進させることができる。
図12の上図は、ベース部材8に対してY1方向(左方)に並進するモジュール保持体2とベース部材8の上面図であり、図12の中央図は、中立状態におけるモジュール保持体2とベース部材8の上面図であり、図12の下図は、ベース部材8に対してY2方向(右方)に並進するモジュール保持体2とベース部材8の上面図である。
制御装置は、ベース部材8に対してY1方向(左方)にモジュール保持体2を並進させる場合、図9の表に示すように、第1ワイヤSA1及び第2ワイヤSA2を比較的大きく伸張させ、第3ワイヤSA3及び第4ワイヤSA4を比較的小さく収縮させ、第5ワイヤSA5及び第6ワイヤSA6を比較的大きく収縮させ、且つ、第7ワイヤSA7及び第8ワイヤSA8を比較的小さく伸張させる。制御装置は、第1ワイヤSA1~第8ワイヤSA8のそれぞれに供給される電流の大きさを個別に調整することによって第1ワイヤSA1~第8ワイヤSA8のそれぞれを上述のように伸縮させる。この制御装置による制御により、駆動部DMは、図12の上図の矢印AR23で示すように、ベース部材8に対してY1方向(左方)にモジュール保持体2を並進させることができる。
同様に、制御装置は、ベース部材8に対してY2方向(右方)にモジュール保持体2を並進させる場合、図9の表に示すように、第1ワイヤSA1及び第2ワイヤSA2を比較的大きく収縮させ、第3ワイヤSA3及び第4ワイヤSA4を比較的小さく伸張させ、第5ワイヤSA5及び第6ワイヤSA6を比較的大きく伸張させ、且つ、第7ワイヤSA7及び第8ワイヤSA8を比較的小さく収縮させる。制御装置は、第1ワイヤSA1~第8ワイヤSA8のそれぞれに供給される電流の大きさを個別に調整することによって第1ワイヤSA1~第8ワイヤSA8のそれぞれを上述のように伸縮させる。この制御装置による制御により、駆動部DMは、図12の下図の矢印AR24で示すように、ベース部材8に対してY2方向(右方)にモジュール保持体2を並進させることができる。
図13の上図は、ベース部材8に対してX軸(第2回転軸RX2)の周りに時計回りに回転するモジュール保持体2とベース部材8の正面図であり、図13の中央図は、中立状態におけるモジュール保持体2とベース部材8の正面図であり、図13の下図は、ベース部材8に対してX軸(第2回転軸RX2)の周りに反時計回りに回転するモジュール保持体2とベース部材8の正面図である。
制御装置は、正面視においてベース部材8に対してX軸(第2回転軸RX2)の周りに時計回りにモジュール保持体2を回転させる場合、図9の表に示すように、第1ワイヤSA1~第3ワイヤSA3及び第8ワイヤSA8を略同じ収縮量で収縮させ、且つ、第4ワイヤSA4~第7ワイヤSA7を略同じ伸張量で伸張させる。制御装置は、第1ワイヤSA1~第8ワイヤSA8のそれぞれに供給される電流の大きさを個別に調整することによって第1ワイヤSA1~第8ワイヤSA8のそれぞれを上述のように伸縮させる。この制御装置による制御により、駆動部DMは、図13の上図の矢印AR27で示すように、ベース部材8に対してX軸(第2回転軸RX2)の周りに時計回りにモジュール保持体2を回転させることができる。
同様に、制御装置は、正面視においてベース部材8に対してX軸(第2回転軸RX2)の周りに反時計回りにモジュール保持体2を回転させる場合、図9の表に示すように、第1ワイヤSA1~第3ワイヤSA3及び第8ワイヤSA8を略同じ伸張量で伸張させ、且つ、第4ワイヤSA4~第7ワイヤSA7を略同じ収縮量で収縮させる。制御装置は、第1ワイヤSA1~第8ワイヤSA8のそれぞれに供給される電流の大きさを個別に調整することによって第1ワイヤSA1~第8ワイヤSA8のそれぞれを上述のように伸縮させる。この制御装置による制御により、駆動部DMは、図13の下図の矢印AR28で示すように、ベース部材8に対してX軸(第2回転軸RX2)の周りに反時計回りにモジュール保持体2を回転させることができる。
図14の上図は、ベース部材8に対してY軸(第3回転軸RX3)の周りに時計回りに回転するモジュール保持体2とベース部材8の右側面図であり、図14の中央図は、中立状態におけるモジュール保持体2とベース部材8の右側面図であり、図14の下図は、ベース部材8に対してY軸(第3回転軸RX3)の周りに反時計回りに回転するモジュール保持体2とベース部材8の右側面図である。
制御装置は、右側面視においてベース部材8に対してY軸(第3回転軸RX3)の周りに時計回りにモジュール保持体2を回転させる場合、図9の表に示すように、第1ワイヤSA1、第3ワイヤSA3、第4ワイヤSA4、及び第6ワイヤSA6を略同じ収縮量で収縮させ、且つ、第2ワイヤSA2、第5ワイヤSA5、第7ワイヤSA7、及び第8ワイヤSA8を略同じ伸張量で伸張させる。制御装置は、第1ワイヤSA1~第8ワイヤSA8のそれぞれに供給される電流の大きさを個別に調整することによって第1ワイヤSA1~第8ワイヤSA8のそれぞれを上述のように伸縮させる。この制御装置による制御により、駆動部DMは、図14の上図の矢印AR29で示すように、ベース部材8に対してY軸(第3回転軸RX3)の周りに時計回りにモジュール保持体2を回転させることができる。
同様に、制御装置は、右側面視においてベース部材8に対してY軸(第3回転軸RX3)の周りに反時計回りにモジュール保持体2を回転させる場合、図9の表に示すように、第1ワイヤSA1、第3ワイヤSA3、第4ワイヤSA4、及び第6ワイヤSA6を略同じ伸張量で伸張させ、且つ、第2ワイヤSA2、第5ワイヤSA5、第7ワイヤSA7、及び第8ワイヤSA8を略同じ収縮量で収縮させる。制御装置は、第1ワイヤSA1~第8ワイヤSA8のそれぞれに供給される電流の大きさを個別に調整することによって第1ワイヤSA1~第8ワイヤSA8のそれぞれを上述のように伸縮させる。この制御装置による制御により、駆動部DMは、図14の下図の矢印AR30で示すように、ベース部材8に対してY軸(第3回転軸RX3)の周りに反時計回りにモジュール保持体2を回転させることができる。
このように、レンズ体LSの光軸OAが傾くようにベース部材8に対してモジュール保持体2を移動させるように伸縮する第1ワイヤSA1~第8ワイヤSA8は駆動部DMとしての第1駆動部DM1(図2参照。)を構成している。そのため、第1駆動部DM1は、図13に示すようにモジュール保持体2を光軸方向に交差する第1揺動軸(第2回転軸RX2)の周りに揺動させるとともに、図14に示すように光軸方向と交差し第1揺動軸(第2回転軸RX2)と垂直な第2揺動軸(第3回転軸RX3)の周りに揺動させることができる。
図15の上図は、ベース部材8に対してZ軸(第1回転軸RX1)の周りに時計回りに回転するモジュール保持体2とベース部材8の上面図であり、図15の中央図は、中立状態におけるモジュール保持体2とベース部材8の上面図であり、図15の下図は、ベース部材8に対してZ軸(第1回転軸RX1)の周りに反時計回りに回転するモジュール保持体2とベース部材8の上面図である。
制御装置は、上面視においてベース部材8に対してZ軸(第1回転軸RX1)の周りに時計回りにモジュール保持体2を回転させる場合、図9の表に示すように、第1ワイヤSA1、第2ワイヤSA2、第5ワイヤSA5、及び第6ワイヤSA6を略同じ伸張量で伸張させ、且つ、第3ワイヤSA3、第4ワイヤSA4、第7ワイヤSA7、及び第8ワイヤSA8を略同じ収縮量で収縮させる。制御装置は、第1ワイヤSA1~第8ワイヤSA8のそれぞれに供給される電流の大きさを個別に調整することによって第1ワイヤSA1~第8ワイヤSA8のそれぞれを上述のように伸縮させる。この制御装置による制御により、駆動部DMは、図15の上図の矢印AR31で示すように、ベース部材8に対してZ軸(第1回転軸RX1)の周りに時計回りにモジュール保持体2を回転させることができる。
同様に、制御装置は、上面視においてベース部材8に対してZ軸(第1回転軸RX1)の周りに反時計回りにモジュール保持体2を回転させる場合、図9の表に示すように、第1ワイヤSA1、第2ワイヤSA2、第5ワイヤSA5、及び第6ワイヤSA6を略同じ収縮量で収縮させ、且つ、第3ワイヤSA3、第4ワイヤSA4、第7ワイヤSA7、及び第8ワイヤSA8を略同じ伸張量で伸張させる。制御装置は、第1ワイヤSA1~第8ワイヤSA8のそれぞれに供給される電流の大きさを個別に調整することによって第1ワイヤSA1~第8ワイヤSA8のそれぞれを上述のように伸縮させる。この制御装置による制御により、駆動部DMは、図15の下図の矢印AR32で示すように、ベース部材8に対してZ軸(第1回転軸RX1)の周りに反時計回りにモジュール保持体2を回転させることができる。
このように、光学モジュール(カメラモジュールMD)が光軸OAの周りに回転するようにベース部材8に対してモジュール保持体2を回転させるように伸縮する第1ワイヤSA1~第8ワイヤSA8は駆動部DMとしての第2駆動部DM2(図2参照。)を構成する。すなわち、本実施形態では、第1駆動部DM1を構成する複数の形状記憶合金ワイヤSA(第1ワイヤSA1~第8ワイヤSA8)は、第2駆動部DM2を構成する複数の形状記憶合金ワイヤSA(第1ワイヤSA1~第8ワイヤSA8)を兼ねている。そして、第1駆動部DM1及び第2駆動部DM2を含む駆動部DMは、図11及び図12に示すようにモジュール保持体2を光軸方向に交差する方向(X軸方向及びY軸方向)へ移動させることができ、且つ、図13及び図14に示すように光軸方向に交差する揺動軸(第2回転軸RX2及び第3回転軸RX3)の周りでモジュール保持体2を揺動させることができるとともに、図15に示すようにモジュール保持体2を光軸OAの周りで回転させることができる。
以上のように、モジュール保持体2は、5自由度の動きを実現できる。この5自由度の動きのそれぞれは、第1ワイヤSA1~第8ワイヤSA8のそれぞれに供給される電流を個別に調整することによって実現される。モジュール保持体2の動きは、5自由度の動きのうちの複数を組み合わせて実現されてもよい。なお、本実施形態では、第1ワイヤSA1~第8ワイヤSA8のうちの一つ又は複数に電流を流すことによって、対応する形状記憶合金ワイヤSAが収縮するとモジュール保持体2が移動する。そして、その移動によって、第1ワイヤSA1~第8ワイヤSA8のうちの別の一つ又は複数が引き延ばされることで、形状記憶合金ワイヤSAの伸張を実現している。
モジュール保持体2が5自由度の動きを実現できるため、レンズ体LSが光軸方向に沿って並進可能であれば、モジュール保持体2に保持されたカメラモジュールMDにおけるレンズ体LSは、6自由度の動きを実現できる。すなわち、モジュール駆動装置101における駆動部DMと、カメラモジュールMDにおける駆動部との組み合わせは、レンズ体LSの6自由度の動きを実現できる。
同様に、レンズ体LSがX軸方向、Y軸方向、及びZ軸方向(光軸方向)のそれぞれに沿って並進可能であれば、モジュール保持体2に保持されたカメラモジュールMDにおけるレンズ体LSは、6自由度の動きを実現できる。この場合、モジュール駆動装置101における駆動部DMは、第1回転軸RX1の周りの回転、第2回転軸RX2の周りの回転、及び、第3回転軸RX3の周りの回転を実現できるように構成されていればよい。すなわち、駆動部DMは、第2回転軸RX2に沿った並進、及び、第3回転軸RX3に沿った並進を利用しないように構成されていてもよい。
また、上述の実施形態では、駆動部DMは、原理的には、モジュール保持体2の6自由度の動きを実現できるが、Z軸方向(光軸方向)の並進については、利用しないように構成されている。モジュール保持体2を光軸方向に並進させても、焦点距離(レンズ体LSの中心点と撮像素子ISとの間の距離)を変化させることはできないためである。そのため、上述の実施形態では、モジュール保持体2を光軸方向に並進させる際に必要となる空間を筐体HS内に確保する必要はない。したがって、そのような空間が省略された構成は、Z軸方向におけるモジュール保持体2の並進を利用できるように形成された構成に比べ、高さ寸法が小さくなるように形成され得る。
同様に、X軸方向におけるモジュール保持体2の並進を利用しない構成は、モジュール保持体2をX軸方向に並進させる際に必要となる空間を省略できるため、X軸方向におけるモジュール保持体2の並進を利用できるように形成された構成に比べ、X軸方向における幅寸法が小さくなるように形成され得る。Y軸方向におけるモジュール保持体2の並進を利用しない構成についても同様である。
上述のような可動側部材MBの5自由度の動きは、図示しない動作検出部によって検出される。動作検出部は、例えば、モジュール保持体2等の可動側部材MBに取り付けられる少なくとも三つの磁石と、ベース部材8等の固定側部材FB又は可撓性基板3に取り付けられる少なくとも三つの磁気センサとによって構成される。
磁気センサは、磁石の位置を検出することによって可動側部材MBの位置を検出できるように構成されている。本実施形態では、磁気センサは、ホール素子を利用して可動側部材MBの位置を検出できるように構成されている。但し、磁気センサは、磁石が発生させる磁界を検出可能な巨大磁気抵抗効果(Giant Magneto Resistive effect: GMR)素子、半導体磁気抵抗(Semiconductor Magneto Resistive: SMR)素子、異方性磁気抵抗(Anisotropic Magneto Resistive: AMR)素子、又はトンネル磁気抵抗(Tunnel Magneto Resistive: TMR)素子等の磁気抵抗素子を利用して可動側部材MBの位置を検出できるように構成されていてもよい。
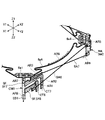
ここで、図16を参照し、光学モジュールの一例であるカメラモジュールMDの構成例について説明する。図16は、カメラモジュールMDの分解斜視図である。なお、図16では、明瞭化のため、カバー部材4x(図1B参照。)、回路基板7(図1B参照。)、レンズ体LS(図1B参照。)、及び撮像素子IS(図1B参照。)の図示が省略されている。図16に示す例では、カメラモジュールMDは、レンズ保持体2x、モジュール側金属部材5x、板ばね6x、モジュール側ベース部材8x、及びモジュール側形状記憶合金ワイヤSAxを含む。
レンズ保持体2xは、液晶ポリマー(LCP)等の合成樹脂を射出成形することで形成されている。具体的には、レンズ保持体2xは、図16に示すように、光軸OAに沿って延びるように形成された筒状部12xと、筒状部12xから径方向外側に突出するように形成された可動側台座部2Dx及び突設部2Sxと、を含む。図16に示す例では、筒状部12xの内周面には、その内周面の上半分とレンズ体LS(図1B参照。)との間に接着剤が行き渡るように螺旋溝が形成されている。
可動側台座部2Dxは、第1可動側台座部2D1x及び第2可動側台座部2D2xを含む。第1可動側台座部2D1x及び第2可動側台座部2D2xは、光軸OAを挟んで互いに反対方向に径方向外側に延びるように配置されている。同様に、突設部2Sxは、第1突設部2S1x及び第2突設部2S2xを含む。第1突設部2S1x及び第2突設部2S2xは、光軸OAを挟んで互いに反対方向に径方向外側に延びるように配置されている。具体的には、可動側台座部2Dx及び突設部2Sxは、上面視で略矩形枠状の外形を有するレンズ保持体2xの四つの角部に対応するように配置され、且つ、交互に並ぶように配置されている。そして、二つの可動側台座部2Dxのそれぞれには、板ばね6xの一部が載置され且つ固定される。
板ばね6xは、モジュール側固定部材FBx(モジュール側ベース部材8x)に対してレンズ保持体2xを光軸OAに平行な方向に移動可能に支持できるように構成されている。図16に示す例では、板ばね6xは、例えば、銅合金、チタン銅系合金(チタン銅)、又は銅ニッケル合金(ニッケルすず銅)等を主な材料とした金属板から作製されている。具体的には、板ばね6xは、第1板ばね6Ax及び第2板ばね6Bxを含む。
モジュール側ベース部材8xは、液晶ポリマー(LCP)等の合成樹脂を用いた射出成形によって形成される。図16に示す例では、モジュール側ベース部材8xは、ベース部材8(図6参照。)と同様に、上面視で略矩形枠状の輪郭を有し、中央に開口8Kxを有する。具体的には、モジュール側ベース部材8xは、円形の開口8Kxを囲むように配置される矩形環状の基部を有する。そして、基部は、四つの辺部8Ex(第1辺部8E1x~第4辺部8E4x)を有する。なお、モジュール側ベース部材8xは、接着剤等でカバー部材4xと一体化され、カバー部材4xとともにカメラモジュールMDの筐体を構成する。また、回路基板7は、モジュール側ベース部材8xの下面に接着剤で固定されている。但し、回路基板7とモジュール側ベース部材8xとの間に、撮像素子ISを囲むように形成された枠状のスペーサが設けられていてもよい。
板ばね6xは、レンズ保持体2xに形成された可動側台座部2Dxと、モジュール側ベース部材8xに形成された固定側台座部8Dxとを繋ぐように構成されている。なお、固定側台座部8Dxは、モジュール側ベース部材8xの基部から上方に突出する部分であり、第1固定側台座部8D1x及び第2固定側台座部8D2xを含む。
より具体的には、第1板ばね6Axは、レンズ保持体2xに形成された第1可動側台座部2D1xと、モジュール側ベース部材8xに形成された第1固定側台座部8D1x及び第2固定側台座部8D2xのそれぞれとを繋ぐように構成されている。同様に、第2板ばね6Bxは、レンズ保持体2xに形成された第2可動側台座部2D2xと、モジュール側ベース部材8xに形成された第1固定側台座部8D1x及び第2固定側台座部8D2xのそれぞれとを繋ぐように構成されている。
モジュール側金属部材5xは、モジュール側形状記憶合金ワイヤSAxの端部が固定されるように構成されている。図16に示す例では、モジュール側金属部材5xは、非磁性金属で形成され、モジュール側固定金属部材5Fx及びモジュール側可動金属部材5Mxを含む。モジュール側固定金属部材5Fxは、モジュール側ベース部材8xの固定側台座部8Dxに固定されるように構成されている。モジュール側可動金属部材5Mxは、レンズ保持体2xの可動側台座部2Dxに固定されるように構成されている。
図16に示す例では、モジュール側固定金属部材5Fxは、固定側ターミナルプレートとも称され、第9固定側ターミナルプレート5F9~第16固定側ターミナルプレート5F16を含む。モジュール側可動金属部材5Mxは、可動側ターミナルプレートとも称され、第3可動側ターミナルプレート5M3~第6可動側ターミナルプレート5M6を含む。
第1板ばね6Axは、モジュール側ベース部材8xの第1固定側台座部8D1xに固定される第1部分6A1xと、モジュール側ベース部材8xの第2固定側台座部8D2xに固定される第2部分6A2xと、レンズ保持体2xの第1可動側台座部2D1xに固定される第3部分6A3xと、を有する。第1部分6A1xは、レーザ溶接等によってモジュール側ベース部材8xに埋設された不図示の導電部材に接続され、第3部分6A3xは、半田付け等によって第3可動側ターミナルプレート5M3及び第4可動側ターミナルプレート5M4のそれぞれに接続される。
同様に、第2板ばね6Bxは、モジュール側ベース部材8xの第1固定側台座部8D1xに固定される第1部分6B1xと、モジュール側ベース部材8xの第2固定側台座部8D2xに固定される第2部分6B2xと、レンズ保持体2xの第2可動側台座部2D2xに固定される第3部分6B3xと、を有する。第2部分6B2xは、レーザ溶接等によってモジュール側ベース部材8xに埋設された不図示の導電部材に接続され、第3部分6B3xは、半田付け等によって第5可動側ターミナルプレート5M5及び第6可動側ターミナルプレート5M6のそれぞれに接続される。
モジュール側形状記憶合金ワイヤSAxは、形状記憶アクチュエータの別の一例であり、形状記憶合金ワイヤSA(図2参照。)と同様に、電流が流れると温度が上昇し、その温度の上昇に応じて収縮する。具体的には、モジュール側形状記憶合金ワイヤSAxは、カバー部材4xの外周壁部の内面に沿うように延びており、モジュール側固定部材FBxに対してモジュール側可動部材MBxを移動可能に支持できるように構成されている。図16に示す例では、モジュール側形状記憶合金ワイヤSAxは、八本の形状記憶合金ワイヤ(第9ワイヤSA9~第16ワイヤSA16)を含み、モジュール側固定部材FBxとしてのモジュール側ベース部材8xに対して、モジュール側可動部材MBxとしてのレンズ保持体2xを移動可能に支持できるように構成されている。第9ワイヤSA9~第16ワイヤSA16のそれぞれは、図16に示すように、一端が圧着又は溶接等によりモジュール側固定金属部材5Fxに固着され、且つ、他端が圧着又は溶接等によりモジュール側可動金属部材5Mxに固着されている。
そして、第9ワイヤSA9~第16ワイヤSA16のそれぞれの一端を固定する第9固定側ターミナルプレート5F9~第16固定側ターミナルプレート5F16のそれぞれは、モジュール側ベース部材8xに埋設された対応する端子部材(導電部材)を介して回路基板7に形成された対応する導電パターンに電気的に接続されている。また、第9ワイヤSA9~第16ワイヤSA16のそれぞれの他端を固定する第3可動側ターミナルプレート5M3~第6可動側ターミナルプレート5M6のそれぞれは、板ばね6x(第1板ばね6Ax及び第2板ばね6Bx)及びモジュール側ベース部材8xに埋設された導電部材を介して回路基板7に形成された対応する導電パターンに電気的に接続されている。また、回路基板7は、可撓性基板3(図2参照。)に接続されている。このため、カメラモジュールMDは、可撓性基板3及び回路基板7を介して、第9ワイヤSA9~第16ワイヤSA16のそれぞれを流れる電流の供給を受けることができるように構成されている。
また、モジュール側形状記憶合金ワイヤSAxは、モジュール側駆動部DMxを構成している。モジュール側駆動部DMxは、モジュール側形状記憶合金ワイヤSAxの収縮を利用することにより、モジュール側ベース部材8xに対してレンズ保持体2xを移動させることができる。なお、モジュール側形状記憶合金ワイヤSAxは、第9ワイヤSA9~第16ワイヤSA16のうちの一つ又は複数が収縮するとレンズ保持体2xが移動し、その移動によって別の一つ又は複数が引き延ばされるように構成されている。
図16に示す例では、モジュール側駆動部DMxは、原理的には、モジュール側可動部材MBxの6自由度の動きを実現できるように構成されている。6自由度の動きは、光軸方向である第1方向(Z軸方向)における並進、第1方向(Z軸方向)に垂直な第2方向(X軸方向)における並進、第1方向及び第2方向のそれぞれに垂直な第3方向(Y軸方向)における並進、第1方向(Z軸方向)の周りの回転、第2方向(X軸方向)の周りの回転、並びに、第3方向(Y軸方向)の周りの回転を含む。なお、第1方向(Z軸方向)は、レンズ体LSの光軸OAと一致する第1回転軸RX1に平行な方向であり、第2方向(X軸方向)は、第2回転軸RX2に平行な方向であり、第3方向(Y軸方向)は、第3回転軸RX3に平行な方向である。また、第2回転軸RX2は第1揺動軸とも称され、第3回転軸RX3は第2揺動軸とも称される。また、図16に示す例では、モジュール側駆動部DMxは、第1方向(Z軸方向)の周りの回転については利用しないように構成されている。駆動部DMによってモジュール保持体2を第1方向(Z軸方向)の周りに回転させることにより、Z軸周りのカメラモジュールMDの回転をもたらす手振れによる撮像画像の乱れを補正する機能が実現されるためであり、レンズ保持体2xまでをも第1方向(Z軸方向)の周りに回転させる必要はないためである。
図17は、レンズ保持体2xの5自由度の動きのそれぞれを実現する際のモジュール側形状記憶合金ワイヤSAxの伸縮状態を示す表である。図17は、「Z軸回転」の欄を有さずに「Z軸方向並進」の欄を有する点で図9に示す表とは異なるが、その他の点では図9に示す表と同じである。なお、図17の第9ワイヤSA9~第16ワイヤSA16は、図9の第1ワイヤSA1~第8ワイヤSA8に対応している。以下では、モジュール側ベース部材8xに対してZ軸方向にレンズ保持体2xを並進させる場合のモジュール側形状記憶合金ワイヤSAxの状態について説明する。なお、モジュール側ベース部材8xに対してX軸方向にレンズ保持体2xを並進させる場合と、モジュール側ベース部材8xに対してY軸方向にレンズ保持体2xを並進させる場合と、モジュール側ベース部材8xに対してX軸(第2回転軸RX2)の周りにレンズ保持体2xを回転させる場合と、モジュール側ベース部材8xに対してY軸(第3回転軸RX3)の周りにレンズ保持体2xを回転させる場合のそれぞれにおけるモジュール側形状記憶合金ワイヤSAxの状態については、ベース部材8に対してモジュール保持体2を動作させる場合と同じであるため、その説明を省略する。
制御装置は、モジュール側ベース部材8xに対してZ1方向(上方)にレンズ保持体2xを並進させる場合、図17の表に示すように、第9ワイヤSA9、第11ワイヤSA11、第13ワイヤSA13、及び第15ワイヤSA15を収縮させ、且つ、第10ワイヤSA10、第12ワイヤSA12、第14ワイヤSA14、及び第16ワイヤSA16を伸張させる。制御装置は、第9ワイヤSA9~第16ワイヤSA16のそれぞれに供給される電流の大きさを個別に調整することによって第9ワイヤSA9~第16ワイヤSA16のそれぞれを伸縮させる。この制御装置による制御により、モジュール側駆動部DMxは、モジュール側ベース部材8xに対してZ1方向(上方)にレンズ保持体2xを並進させることができる。
同様に、制御装置は、モジュール側ベース部材8xに対してZ2方向(下方)にレンズ保持体2xを並進させる場合、図17の表に示すように、第9ワイヤSA9、第11ワイヤSA11、第13ワイヤSA13、及び第15ワイヤSA15を略同じ伸張量で伸張させ、且つ、第10ワイヤSA10、第12ワイヤSA12、第14ワイヤSA14、及び第16ワイヤSA16を略同じ収縮量で収縮させる。制御装置は、第9ワイヤSA9~第16ワイヤSA16のそれぞれに供給される電流の大きさを個別に調整することによって第9ワイヤSA9~第16ワイヤSA16のそれぞれを伸縮させる。この制御装置による制御により、モジュール側駆動部DMxは、モジュール側ベース部材8xに対してZ2方向(下方)にレンズ保持体2xを並進させることができる。
上述のように、本発明の実施形態に係るモジュール駆動装置101は、図2に示すように、固定側部材FBと、レンズ体LS及び撮像素子ISを有する光学モジュール(カメラモジュールMD)を保持可能なモジュール保持体2と、レンズ体LSの光軸OAが傾くように、固定側部材FBに対してモジュール保持体2を移動させる第1駆動部DM1と、光軸OAの周りに回転するように、固定側部材FBに対してモジュール保持体2を回転させる第2駆動部DM2と、を備えている。第1駆動部DM1は、モジュール保持体2を含む可動側部材MBと固定側部材FBとの間に設けられた複数の形状記憶合金ワイヤSAを含んで構成されている。第2駆動部DM2は、可動側部材MBと固定側部材FBとの間に設けられた複数の形状記憶合金ワイヤSAを含んで構成されている。
この構成では、モジュール保持体2の移動が形状記憶合金ワイヤSAによって行われる。そのため、この構成は、モジュール駆動装置101の大型化を抑制でき、例えば、モジュール保持体2の移動のためにボイスコイルモータを用いる装置よりも小さいサイズを実現できる。また、この構成は、モジュール駆動装置101の軽量化を実現できる。また、この構成は、モジュール保持体2の移動のためにボイスコイルモータを用いないため、ボイスコイルモータを用いる装置が隣に配置された場合であっても、その装置とモジュール駆動装置101との間の磁気的な干渉を抑制することができる。
また、この構成は、レンズ体LSの光軸OAの周りでモジュール保持体2を回転させることができるため、モジュール駆動装置101が搭載されるスマートフォン等の機器の撮影時における、第1回転軸RX1の軸線の周りの回転をもたらす手振れによる画像への影響を抑制することができる。
また、この構成は、レンズ体LSの光軸OAが傾くようにモジュール保持体2を移動させることができるため、モジュール駆動装置101が搭載されるスマートフォン等の機器の撮影時における、光軸OAが傾くような手振れを補正できる。例えば、この構成は、カメラモジュールMDに手振れ補正機能が備えられていない場合でも、手振れ補正を実現できる。
また、モジュール駆動装置101では、第1駆動部DM1を構成する複数の形状記憶合金ワイヤSA(第1ワイヤSA1~第8ワイヤSA8)は、第2駆動部DM2を構成する複数の形状記憶合金ワイヤSA(第1ワイヤSA1~第8ワイヤSA8)を兼ねていてもよい。そして、第1駆動部DM1及び第2駆動部DM2は、固定側部材FBに対してモジュール保持体2を移動させる駆動部DMを構成していてもよい。この構成は、部品点数を削減でき、ひいては、モジュール駆動装置101の小型化を実現できるという効果をもたらす。
また、モジュール駆動装置101では、第1駆動部DM1は、図13に示すようにモジュール保持体2を光軸方向に交差する第1揺動軸(第2回転軸RX2)の周りに揺動させるとともに、図14に示すように光軸方向と交差し第1揺動軸の軸線方向と垂直な軸線方向を有する第2揺動軸(第3回転軸RX3)の周りに揺動させてもよい。この場合、第1揺動軸の軸線方向と第2揺動軸の軸線方向とが垂直であれば、第1揺動軸と第2揺動軸とは、それぞれの軸線が直交しなくてもよい。すなわち、第1揺動軸と第2揺動軸とがねじれの関係にあってもよい。
この構成は、筐体HS内の限られたスペースに収容される第1駆動部DM1により、互いに垂直な二つの揺動軸の周りでモジュール保持体2を揺動させることができるため、モジュール駆動装置101のスペース効率を高めることができ、ひいては、モジュール駆動装置101の小型化を実現できるという効果をもたらす。
また、モジュール駆動装置101では、第1駆動部DM1及び第2駆動部DM2を含む駆動部DMは、モジュール保持体2を光軸方向に交差する方向へ移動させるように構成されていてもよい。この構成は、モジュール駆動装置101が搭載されるスマートフォン等の機器の撮影時における、前後方向(X軸方向)及び左右方向(Y軸方向)の手振れを補正できる。例えば、この構成は、カメラモジュールMDに手振れ補正機能が備えられていない場合でも、手振れ補正を実現できる。
また、モジュール駆動装置101では、複数の形状記憶合金ワイヤSAは、図2に示すように、光軸方向(第1回転軸RX1の軸線方向)に沿って見た上面視において、モジュール保持体2を挟んで第1の方向(X軸方向)に離間して配置される第1ワイヤSA1及び第5ワイヤSA5と、第1の方向(X軸方向)に沿って見た側面視(前面視)において、第1ワイヤSA1と交差するように配置される第2ワイヤSA2と、第1の方向(X軸方向)に沿って見た側面視(後面視)において、第5ワイヤSA5と交差するように配置される第6ワイヤSA6と、を含んでいてもよい。そして、第1ワイヤSA1、第2ワイヤSA2、第5ワイヤSA5、及び第6ワイヤSA6のそれぞれは、一端が固定側部材FB(ベース部材8)に固定され、他端が可動側部材MB(モジュール保持体2)に固定されていてもよい。
この構成は、筐体HS内の限られたスペースに配置される第1ワイヤSA1、第2ワイヤSA2、第5ワイヤSA5、及び第6ワイヤSA6により、固定側部材FBに対してモジュール保持体2を6自由度で効率的に動かすことができるという効果をもたらす。
また、モジュール駆動装置101では、複数の形状記憶合金ワイヤSAは、図2に示すように、光軸方向(第1回転軸RX1の軸線方向)に沿って見た上面視において、モジュール保持体2を挟んで第1の方向(X軸方向)に垂直な第2の方向(Y軸方向)に離間して配置される第3ワイヤSA3及び第7ワイヤSA7と、第2の方向(Y軸方向)に沿って見た側面視(左側面視)において、第3ワイヤSA3と交差するように配置される第4ワイヤSA4と、第2の方向(Y軸方向)に沿って見た側面視(右側面視)において、第7ワイヤSA7と交差するように配置される第8ワイヤSA8と、を更に含んでいてもよい。そして、第3ワイヤSA3、第4ワイヤSA4、第7ワイヤSA7、及び第8ワイヤSA8のそれぞれは、一端が固定側部材FB(ベース部材8)に固定され、他端が可動側部材MB(モジュール保持体2)に固定されていてもよい。
この構成は、筐体HS内の限られたスペースに配置される第1ワイヤSA1~第8ワイヤSA8により、固定側部材FBに対してモジュール保持体2を6自由度でより効率的に動かすことができるという効果をもたらす。
また、モジュール駆動装置101では、固定側部材FBは、八つの第1金属部材(第1固定側ターミナルプレート5F1~第8固定側ターミナルプレート5F8)を有していてもよい。この場合、八本の形状記憶合金ワイヤSA(第1ワイヤSA1~第8ワイヤSA8)のそれぞれの一端は、対応する第1金属部材に個別に接続されていてもよい。上述の実施形態では、図2に示すように、第1ワイヤSA1の一端は第1固定側ターミナルプレート5F1に接続され、第2ワイヤSA2の一端は第2固定側ターミナルプレート5F2に接続され、第3ワイヤSA3の一端は第3固定側ターミナルプレート5F3に接続され、第4ワイヤSA4の一端は第4固定側ターミナルプレート5F4に接続され、第5ワイヤSA5の一端は第5固定側ターミナルプレート5F5に接続され、第6ワイヤSA6の一端は第6固定側ターミナルプレート5F6に接続され、第7ワイヤSA7の一端は第7固定側ターミナルプレート5F7に接続され、第8ワイヤSA8の一端は第8固定側ターミナルプレート5F8に接続されている。この構成は、八本の形状記憶合金ワイヤSAのそれぞれに個別に電流を供給できるようにするための導電路の確保が容易になるという効果をもたらす。
また、モジュール駆動装置101では、八本の形状記憶合金ワイヤSAのうちの少なくとも四本の形状記憶合金ワイヤSAのそれぞれの他端は、可動側部材MBに設けられた導電体を介して互いに導通していてもよい。この構成では、八本の形状記憶合金ワイヤSAのうちの少なくとも四本の形状記憶合金ワイヤSAのそれぞれの他端が共通の電位に接続される。そのため、この構成は、八本の形状記憶合金ワイヤSAのそれぞれに個別に電流を供給できるようにするための導電路の確保が更に容易になるという効果をもたらす。
また、モジュール駆動装置101では、導電体は、少なくとも四本の形状記憶合金ワイヤSAのそれぞれの他端が接続される第2金属部材(可動側金属部材5M)と、可動側部材MBと固定側部材FBとを連結する弾性変形可能な弾性金属部材6とを含んでいてもよい。この場合、固定側部材FBは、第3金属部材(導電部材CM)が埋設された柱状部(固定側台座部8D)を有していてもよい。そして、図7Aに示すように、第2金属部材(可動側金属部材5M)に弾性金属部材6の固定部(第2固定部6e2及び第4固定部6e4)が接続され、第3金属部材(導電部材CM)に弾性金属部材6の別の固定部(第1固定部6e1及び第3固定部6e3)が接続されていてもよい。なお、弾性金属部材6は、板ばねであってもよい。この構成は、八本の形状記憶合金ワイヤSAのそれぞれに個別に電流を供給できるようにするための導電路の確保が更に容易になるという効果をもたらす。
また、モジュール駆動装置101では、八本の形状記憶合金ワイヤSAのそれぞれの他端は、可動側金属部材5M、弾性金属部材6、及び導電部材CMを介して互いに導通するように構成されている。具体的には、図7Aに示すように、第1ワイヤSA1~第4ワイヤSA4のそれぞれの他端は、第1可動側ターミナルプレート5M1及び弾性金属部材6と第1導電部材CM1又は第2導電部材CM2とを介して接地端子に接続されている。また、第5ワイヤSA5~第8ワイヤSA8のそれぞれの他端は、第2可動側ターミナルプレート5M2及び弾性金属部材6と第1導電部材CM1又は第2導電部材CM2とを介して接地端子に接続されている。なお、弾性金属部材6の第1固定部6e1は、第1導電部材CM1の第1接合面部CP1(図6の中央図参照。)に溶接されており、弾性金属部材6の第3固定部6e3は、第2導電部材CM2の第2接合面部CP2(図6の中央図参照。)に溶接されている。また、第1導電部材CM1の第1接続部ED1(図6の中央図参照。)は、可撓性基板3の第9導電パターンPT9(図2参照。)に半田付けされ、第2導電部材CM2の第2接続部ED2(図6の中央図参照。)は、可撓性基板3の第10導電パターンPT10(図2参照。)に半田付けされている。そして、第9導電パターンPT9及び第10導電パターンPT10は何れも接地端子(図示せず。)に接続されている。
また、モジュール駆動装置101では、固定側部材FBは、上面視で少なくとも四つの隅部4Cを有する形状(例えば略矩形状)となる筐体HS(カバー部材4)を有していてもよい。この場合、筐体HS(カバー部材4)は、図2に示すように、一方の対角線上に位置する第1隅部4C1及び第3隅部4C3と、他方の対角線上に位置する第2隅部4C2及び第4隅部4C4と、を有していてもよい。そして、八本の形状記憶合金ワイヤSAのそれぞれの一端は、第1隅部4C1又は第3隅部4C3に対向するように配置された固定側部材FBの固定側ワイヤ支持部として機能するベース部材8の固定側台座部8Dに支持され、八本の形状記憶合金ワイヤSAのそれぞれの他端は、第2隅部4C2又は第4隅部4C4に対向するように配置された可動側部材MBの可動側ワイヤ支持部として機能するモジュール保持体2の可動側台座部2Dに支持されていてもよい。この構成は、モジュール駆動装置101の大型化を更に抑制できるという効果をもたらす。また、この構成は、モジュール駆動装置101の更なる軽量化を実現できるという効果をもたらす。なお、筐体HSは、上面視で略六角形状又は略八角形状等の他の形状となるように構成されていてもよい。
また、モジュール駆動装置101では、撮像素子ISは、第1プリント配線基板としての回路基板7に搭載されていてもよい。この場合、回路基板7は、モジュール保持体2に固定され、且つ、可撓性を有する第2プリント配線基板としての可撓性基板3に接続されていてもよい。また、回路基板7は、可撓性基板3よりも厚くなるように構成されていてもよい。この構成は、撮像素子ISを容易にモジュール保持体2に一体化できるという効果をもたらす。なお、撮像素子ISは、IRカットフィルタを備えたものであってもよい。
また、モジュール駆動装置101では、カメラモジュールMDは、図1Bに示すように、撮像素子ISが搭載される第1プリント配線基板としての回路基板7を有していてもよい。この場合、固定側部材FBは、可撓性を有する第2プリント配線基板としての可撓性基板3を有していてもよい。そして、可撓性基板3には、回路基板7が接続されるとともに、八つの第1金属部材(第1固定側ターミナルプレート5F1~第8固定側ターミナルプレート5F8)が接続されていてもよい。この構成では、第1プリント配線基板(回路基板7)及び八つの第1金属部材(第1固定側ターミナルプレート5F1~第8固定側ターミナルプレート5F8)は何れも第2プリント配線基板(可撓性基板3)に接続される。具体的には、回路基板7は、可撓性基板3の内側部分3i(図2参照。)に接続される。また、第1固定側ターミナルプレート5F1の第1接続部CT1(図7A参照。)は、可撓性基板3の外側部分3eに形成された第1導電パターンPT1(図2参照。)に接続される。同様に、第2接続部CT2は第2導電パターンPT2に接続され、第3接続部CT3は第3導電パターンPT3に接続され、第4接続部CT4は第4導電パターンPT4に接続され、第5接続部CT5は第5導電パターンPT5に接続され、第6接続部CT6は第6導電パターンPT6に接続され、第7接続部CT7は第7導電パターンPT7に接続され、第8接続部CT8は第8導電パターンPT8に接続される。そのため、この構成では、外部装置との接続が容易になるという効果がもたらされる。
また、本発明の実施形態に係る光学装置(撮像装置)は、図2に示すように、上述のモジュール駆動装置101と、モジュール保持体2に保持された光学モジュール(カメラモジュールMD)と、を有する。
この構成では、モジュール保持体2に保持された光学モジュール(カメラモジュールMD)の移動が形状記憶合金ワイヤSAによって行われる。そのため、この構成は、光学装置の大型化を抑制でき、例えば、光学モジュール(カメラモジュールMD)の移動のためにボイスコイルモータを用いる装置よりも小さいサイズを実現できる。また、この構成は、光学装置の軽量化を実現できる。また、この構成は、光学モジュール(カメラモジュールMD)の移動のためにボイスコイルモータを用いないため、ボイスコイルモータを用いる装置が隣に配置された場合であっても、その装置と光学装置との間の磁気的な干渉を抑制することができる。
また、光学装置では、光学モジュールは、図16に示すように、モジュール保持体2(図2参照。)とともに移動するモジュール側固定部材FBx(モジュール側ベース部材8x)と、レンズ体LS(図2参照。)が保持されるレンズ保持体2xと、モジュール側固定部材FBx(モジュール側ベース部材8x)に対してレンズ保持体2xを移動させるモジュール側駆動部DMxと、を有していてもよい。
この構成は、カメラモジュールMDの筐体内の限られたスペースに収容されるモジュール側駆動部DMxにより、モジュール側固定部材FBx(モジュール側ベース部材8x)に対してレンズ保持体2xを移動させることができるため、カメラモジュールMDのスペース効率を高めることができ、ひいては、カメラモジュールMD及び光学装置の小型化を実現できるという効果をもたらす。
また、光学装置では、モジュール側駆動部DMxは、レンズ保持体2xを含むモジュール側可動部材MBxとモジュール側固定部材FBx(モジュール側ベース部材8x)との間に設けられた複数のモジュール側形状記憶合金ワイヤSAxを含んで構成されていてもよい。
この構成は、カメラモジュールMDの筐体内の限られたスペースに収容される複数のモジュール側形状記憶合金ワイヤSAxにより、モジュール側固定部材FBx(モジュール側ベース部材8x)に対してレンズ保持体2xを移動させることができるため、カメラモジュールMDのスペース効率を高めることができ、ひいては、カメラモジュールMD及び光学装置の小型化を実現できるという効果をもたらす。
また、光学装置は、上述のモジュール駆動装置101と、モジュール保持体2に保持された光学モジュールとを備えていてもよい。そして、光学モジュールは、モジュール保持体2とともに移動するモジュール側固定部材FBx(モジュール側ベース部材8x)と、レンズ体LS(図2参照。)が保持されるレンズ保持体2xと、モジュール側固定部材FBx(モジュール側ベース部材8x)に対してレンズ保持体2xを移動させるモジュール側駆動部DMxと、を備えていてもよい。
この場合、モジュール側駆動部DMxは、レンズ保持体2xを含むモジュール側可動部材MBxとモジュール側固定部材FBx(モジュール側ベース部材8x)との間に設けられた複数のモジュール側形状記憶合金ワイヤSAxを含んで構成されていてもよい。そして、複数のモジュール側形状記憶合金ワイヤSAxは、光軸方向に沿って見た上面視において、レンズ保持体2xを挟んで第1揺動軸(第2回転軸RX2)の軸線方向に離間して配置される第9ワイヤSA9及び第13ワイヤSA13、並びに、レンズ保持体2xを挟んで第2揺動軸(第3回転軸RX3)の軸線方向に離間して配置される第11ワイヤSA11及び第15ワイヤSA15と、第1揺動軸(第2回転軸RX2)の軸線方向に沿って見た側面視(前面視)において、第9ワイヤSA9と交差するように配置される第10ワイヤSA10と、第2揺動軸(第3回転軸RX3)の軸線方向に沿って見た側面視(左側面視)において、第11ワイヤSA11と交差するように配置される第12ワイヤSA12と、第1揺動軸(第2回転軸RX2)の軸線方向に沿って見た側面視(後面視)において、第13ワイヤSA13と交差するように配置される第14ワイヤSA14と、第2揺動軸(第3回転軸RX3)の軸線方向に沿って見た側面視(右側面視)において、第15ワイヤSA15と交差するように配置される第16ワイヤSA16と、を含んでいてもよい。そして、第9ワイヤSA9~第16ワイヤSA16のそれぞれは、一端がモジュール側固定部材FBx(モジュール側ベース部材8xに固定されたモジュール側固定金属部材5Fx)に固定され、他端がモジュール側可動部材MBx(レンズ保持体2xに固定されたモジュール側可動金属部材5Mx)に固定されていてもよい。
この構成は、カメラモジュールMDの筐体内の限られたスペースに配置される第9ワイヤSA9~第16ワイヤSA16により、モジュール側固定部材FBx(モジュール側ベース部材8x)に対してモジュール側可動部材MBxを複数の自由度(例えば、5自由度)でより効率的に動かすことができるという効果をもたらす。
以上、本発明の好ましい実施形態について詳説した。しかしながら、本発明は、上述した実施形態に制限されることはない。上述した実施形態は、本発明の範囲を逸脱することなしに、種々の変形及び置換等が適用され得る。また、上述の実施形態を参照して説明された特徴のそれぞれは、技術的に矛盾しない限り、適宜に組み合わされてもよい。
例えば、上述の実施形態では、弾性金属部材6は、一部品で構成されているが、二部品で構成されていてもよい。例えば、弾性金属部材6は、第1固定部6e1の中央部、及び、第3固定部6e3の中央部のそれぞれにおいて、第1弾性金属部材と第2弾性金属部材とに二分割されていてもよい。この場合、第1弾性金属部材は、第1導電部材CM1に接続され、第2導電部材CM2には接続されないように構成されていてもよい。また、第2弾性金属部材は、第2導電部材CM2に接続され、第1導電部材CM1には接続されないように構成されていてもよい。
また、上述の実施形態では、可動側部材MBの位置は、磁気センサの出力に基づいて検出されるが、形状記憶合金ワイヤSAの抵抗値を検出するセンサの出力に基づいて検出されてもよい。
また、上述の実施形態では、固定側金属部材5Fは、接着剤によりベース部材8に固定されているが、ベース部材8に埋設されていてもよく、ベース部材8の表面に形成された導電パターンであってもよい。同様に、可動側金属部材5Mは、接着剤によりモジュール保持体2に固定されているが、モジュール保持体2に埋設されていてもよく、モジュール保持体2の表面に形成された導電パターンであってもよい。
また、上述の実施形態では、カメラモジュールMDを構成するレンズ駆動装置LDのカバー部材4xは、モジュール保持体2とは別部材であるが、カバー部材4xとモジュール保持体2とが一体に形成されていてもよい。この場合、カバー部材4xは、モジュール保持体を構成し、このモジュール保持体に保持される光学モジュールは、カメラモジュールMDからカバー部材4xを除いたものであってもよい。
また、上述の実施形態では、可動側部材MBは、主にモジュール保持体2によって構成されているが、互いに移動可能な複数の部材の組み合わせによって可動側部材MBが構成されていてもよい。
本願は、2021年4月14日に出願した日本国特許出願2021-068544号に基づく優先権を主張するものであり、この日本国特許出願の全内容を本願に参照により援用する。
2・・・モジュール保持体 2D、2Dx・・・可動側台座部 2D1、2D1x・・・第1可動側台座部 2D2、2D2x・・・第2可動側台座部 2F・・・枠体 2G・・・溝部 2S、2Sx・・・突設部 2S1、2S1x・・・第1突設部 2S2、2S2x・・・第2突設部 2T・・・突出部 2x・・・レンズ保持体 3・・・可撓性基板 3e・・・外側部分 3i・・・内側部分 4、4x・・・カバー部材 4A・・・外周壁部 4A1・・・第1側板部 4A2・・・第2側板部 4A3・・・第3側板部 4A4・・・第4側板部 4B・・・天板部 4C・・・隅部 4C1・・・第1隅部 4C2・・・第2隅部 4C3・・・第3隅部 4C4・・・第4隅部 4K・・・開口 5・・・金属部材 5F・・・固定側金属部材 5F1・・・第1固定側ターミナルプレート 5F2・・・第2固定側ターミナルプレート 5F3・・・第3固定側ターミナルプレート 5F4・・・第4固定側ターミナルプレート 5F5・・・第5固定側ターミナルプレート 5F6・・・第6固定側ターミナルプレート 5F7・・・第7固定側ターミナルプレート 5F8・・・第8固定側ターミナルプレート 5F9・・・第9固定側ターミナルプレート 5F10・・・第10固定側ターミナルプレート 5F11・・・第11固定側ターミナルプレート 5F12・・・第12固定側ターミナルプレート 5F13・・・第13固定側ターミナルプレート 5F14・・・第14固定側ターミナルプレート 5F15・・・第15固定側ターミナルプレート 5F16・・・第16固定側ターミナルプレート 5Fx・・・モジュール側固定金属部材 5M・・・可動側金属部材 5M1・・・第1可動側ターミナルプレート 5M2・・・第2可動側ターミナルプレート 5M3・・・第3可動側ターミナルプレート 5M4・・・第4可動側ターミナルプレート 5M5・・・第5可動側ターミナルプレート 5M6・・・第6可動側ターミナルプレート 5Mx・・・モジュール側可動金属部材 5x・・・モジュール側金属部材 6・・・弾性金属部材 6e1・・・第1固定部 6e2・・・第2固定部 6e3・・・第3固定部 6e4・・・第4固定部 6g1・・・第1腕部 6g2・・・第2腕部 6g3・・・第3腕部 6g4・・・第4腕部 6H1・・・第1貫通孔 6H2・・・第2貫通孔 6H3・・・第3貫通孔 6H4・・・第4貫通孔 6H5・・・第5貫通孔 6H6・・・第6貫通孔 6H7・・・第7貫通孔 6H8・・・第8貫通孔 6H9・・・第9貫通孔 6H10・・・第10貫通孔 6H11・・・第11貫通孔 6H12・・・第12貫通孔 6x・・・板ばね 6Ax・・・第1板ばね 6A1x・・・第1部分 6A2x・・・第2部分 6A3x・・・第3部分 6Bx・・・第2板ばね 6B1x・・・第1部分 6B2x・・・第2部分 6B3x・・・第3部分 7・・・回路基板 8・・・ベース部材 8D、8Dx・・・固定側台座部 8D1、8D1x・・・第1固定側台座部 8D2、8D2x・・・第2固定側台座部 8E、8Ex・・・辺部 8E1、8E1x・・・第1辺部 8E2、8E2x・・・第2辺部 8E3、8E3x・・・第3辺部 8E4、8E4x・・・第4辺部 8K、8Kx・・・開口 8T・・・突出部 8x・・・モジュール側ベース部材 12x・・・筒状部 101・・・モジュール駆動装置 BP・・・折り曲げ片 CM・・・導電部材 CM1・・・第1導電部材 CM2・・・第2導電部材 CP・・・接合面部 CP1・・・第1接合面部 CP2・・・第2接合面部 CT・・・接続部 CT1・・・第1接続部 CT2・・・第2接続部 CT3・・・第3接続部 CT4・・・第4接続部 CT5・・・第5接続部 CT6・・・第6接続部 CT7・・・第7接続部 CT8・・・第8接続部 DM・・・駆動部 DM1・・・第1駆動部 DM2・・・第2駆動部 DMx・・・モジュール側駆動部 ED・・・接続部 ED1・・・第1接続部 ED2・・・第2接続部 FB・・・固定側部材 FBx・・・モジュール側固定部材 HS・・・筐体 IS・・・撮像素子 J1~J4・・・保持部 LD・・・レンズ駆動装置 LS・・・レンズ体 MB・・・可動側部材 MBx・・・モジュール側可動部材 MD・・・カメラモジュール OA・・・光軸 PT・・・導電パターン PT1・・・第1導電パターン PT2・・・第2導電パターン PT3・・・第3導電パターン PT4・・・第4導電パターン PT5・・・第5導電パターン PT6・・・第6導電パターン PT7・・・第7導電パターン PT8・・・第8導電パターン PT9・・・第9導電パターン PT10・・・第10導電パターン RX1・・・第1回転軸 RX2・・・第2回転軸 RX3・・・第3回転軸 SA・・・形状記憶合金ワイヤ SAx・・・モジュール側形状記憶合金ワイヤ SA1・・・第1ワイヤ SA2・・・第2ワイヤ SA3・・・第3ワイヤ SA4・・・第4ワイヤ SA5・・・第5ワイヤ SA6・・・第6ワイヤ SA7・・・第7ワイヤ SA8・・・第8ワイヤ SA9・・・第9ワイヤ SA10・・・第10ワイヤ SA11・・・第11ワイヤ SA12・・・第12ワイヤ SA13・・・第13ワイヤ SA14・・・第14ワイヤ SA15・・・第15ワイヤ SA16・・・第16ワイヤ
Claims (15)
- 固定側部材と、
レンズ体及び撮像素子を有する光学モジュールを保持可能なモジュール保持体と、
前記レンズ体の光軸が傾くように、前記固定側部材に対して前記モジュール保持体を移動させる第1駆動部と、前記光軸の周りに回転するように、前記固定側部材に対して前記モジュール保持体を回転させる第2駆動部と、を備えたモジュール駆動装置において、
前記第1駆動部は、前記モジュール保持体を含む可動側部材と前記固定側部材との間に設けられた複数の形状記憶合金ワイヤを含んで構成され、
前記第2駆動部は、前記可動側部材と前記固定側部材との間に設けられた複数の形状記憶合金ワイヤを含んで構成されている、
ことを特徴とするモジュール駆動装置。 - 前記第1駆動部を構成する複数の前記形状記憶合金ワイヤは、前記第2駆動部を構成する複数の前記形状記憶合金ワイヤを兼ねている、
請求項1に記載のモジュール駆動装置。 - 前記第1駆動部は、前記モジュール保持体を光軸方向に交差する第1揺動軸の周りに揺動させるとともに、光軸方向と交差し前記第1揺動軸の軸線方向と垂直な軸線方向を有する第2揺動軸の周りに揺動させる、
請求項1又は請求項2に記載のモジュール駆動装置。 - 前記第1駆動部及び前記第2駆動部を含む駆動部は、前記モジュール保持体を光軸方向に交差する方向へ移動させる、
請求項1乃至請求項3の何れかに記載のモジュール駆動装置。 - 複数の前記形状記憶合金ワイヤは、
光軸方向に沿って見た上面視において、前記モジュール保持体を挟んで第1の方向に離間して配置される第1ワイヤ及び第5ワイヤと、
前記第1の方向に沿って見た側面視において、前記第1ワイヤと交差するように配置される第2ワイヤと、
前記第1の方向に沿って見た側面視において、前記第5ワイヤと交差するように配置される第6ワイヤと、を含み、
前記第1ワイヤ、前記第2ワイヤ、前記第5ワイヤ、及び前記第6ワイヤのそれぞれは、一端が前記固定側部材に固定され、他端が前記可動側部材に固定されている、
請求項2に記載のモジュール駆動装置。 - 複数の前記形状記憶合金ワイヤは、
光軸方向に沿って見た上面視において、前記モジュール保持体を挟んで前記第1の方向に垂直な第2の方向に離間して配置される第3ワイヤ及び第7ワイヤと、
前記第2の方向に沿って見た側面視において、前記第3ワイヤと交差するように配置される第4ワイヤと、
前記第2の方向に沿って見た側面視において、前記第7ワイヤと交差するように配置される第8ワイヤと、を含み、
前記第3ワイヤ、前記第4ワイヤ、前記第7ワイヤ、及び前記第8ワイヤのそれぞれは、一端が前記固定側部材に固定され、他端が前記可動側部材に固定されている、
請求項5に記載のモジュール駆動装置。 - 前記固定側部材は、八つの第1金属部材を有し、前記第1ワイヤ乃至前記第8ワイヤからなる八本の前記形状記憶合金ワイヤのそれぞれの一端は、対応する前記第1金属部材に個別に接続されている、
請求項6に記載のモジュール駆動装置。 - 八本の前記形状記憶合金ワイヤのうちの少なくとも四本の前記形状記憶合金ワイヤのそれぞれの他端は、前記可動側部材に設けられた導電体を介して互いに導通している、
請求項7に記載のモジュール駆動装置。 - 前記導電体は、少なくとも四本の前記形状記憶合金ワイヤのそれぞれの他端が接続される第2金属部材と、前記可動側部材と前記固定側部材とを連結する弾性変形可能な弾性金属部材とを含み、
前記固定側部材は、第3金属部材が埋設された柱状部を有し、
前記第3金属部材に、前記弾性金属部材の固定部が接続され、
前記第2金属部材に、前記弾性金属部材の別の固定部が接続されている、
請求項8に記載のモジュール駆動装置。 - 前記固定側部材は、上面視で少なくとも四つの隅部を有する形状となる筐体を有し、
前記筐体は、一つの対角線上に位置する第1隅部及び第3隅部と、別の一つの対角線上に位置する第2隅部及び第4隅部と、を有し、
八本の前記形状記憶合金ワイヤのそれぞれの一端は、前記第1隅部又は前記第3隅部に対向するように配置された前記固定側部材の固定側ワイヤ支持部に支持され、
八本の前記形状記憶合金ワイヤのそれぞれの他端は、前記第2隅部又は前記第4隅部に対向するように配置された前記可動側部材の可動側ワイヤ支持部に支持されている、
請求項7乃至請求項9の何れかに記載のモジュール駆動装置。 - 前記光学モジュールは、前記撮像素子が搭載される第1プリント配線基板を有し、
前記固定側部材は、可撓性を有する第2プリント配線基板を有しており、
前記第2プリント配線基板に、前記第1プリント配線基板が接続されるとともに、八つの前記第1金属部材が接続されている、
請求項7乃至請求項9の何れかに記載のモジュール駆動装置。 - 請求項1乃至請求項11の何れかに記載のモジュール駆動装置と、
前記モジュール保持体に保持された前記光学モジュールと、を有する、
ことを特徴とする光学装置。 - 前記光学モジュールは、
前記モジュール保持体とともに移動するモジュール側固定部材と、
前記レンズ体が保持されるレンズ保持体と、
前記モジュール側固定部材に対して前記レンズ保持体を移動させるモジュール側駆動部と、を有する、
請求項12に記載の光学装置。 - 前記モジュール側駆動部は、前記レンズ保持体を含むモジュール側可動部材と前記モジュール側固定部材との間に設けられた複数のモジュール側形状記憶合金ワイヤを含んで構成される、
請求項13に記載の光学装置。 - 請求項3に記載のモジュール駆動装置と、
前記モジュール保持体に保持された光学モジュールと、を備え、
前記光学モジュールは、
前記モジュール保持体とともに移動するモジュール側固定部材と、
前記レンズ体が保持されるレンズ保持体と、
前記モジュール側固定部材に対して前記レンズ保持体を移動させるモジュール側駆動部と、を備え、
前記モジュール側駆動部は、前記レンズ保持体を含むモジュール側可動部材と前記モジュール側固定部材との間に設けられた複数のモジュール側形状記憶合金ワイヤを含んで構成され、
複数の前記モジュール側形状記憶合金ワイヤは、
光軸方向に沿って見た上面視において、前記レンズ保持体を挟んで前記第1揺動軸の軸線方向に離間して配置される第9ワイヤ及び第13ワイヤ、並びに、前記レンズ保持体を挟んで前記第2揺動軸の軸線方向に離間して配置される第11ワイヤ及び第15ワイヤと、
前記第1揺動軸の軸線方向に沿って見た側面視において、前記第9ワイヤと交差するように配置される第10ワイヤと、
前記第2揺動軸の軸線方向に沿って見た側面視において、前記第11ワイヤと交差するように配置される第12ワイヤと、
前記第1揺動軸の軸線方向に沿って見た側面視において、前記第13ワイヤと交差するように配置される第14ワイヤと、
前記第2揺動軸の軸線方向に沿って見た側面視において、前記第15ワイヤと交差するように配置される第16ワイヤと、を含み、
前記第9ワイヤ乃至前記第16ワイヤのそれぞれは、一端が前記モジュール側固定部材に固定され、他端が前記モジュール側可動部材に固定されている、
ことを特徴とする光学装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202280028365.8A CN117203581A (zh) | 2021-04-14 | 2022-03-14 | 模块驱动装置以及光学装置 |
| JP2023514523A JPWO2022219984A1 (ja) | 2021-04-14 | 2022-03-14 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021068544 | 2021-04-14 | ||
| JP2021-068544 | 2021-04-14 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022219984A1 true WO2022219984A1 (ja) | 2022-10-20 |
Family
ID=83640309
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/011224 WO2022219984A1 (ja) | 2021-04-14 | 2022-03-14 | モジュール駆動装置及び光学装置 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JPWO2022219984A1 (ja) |
| CN (1) | CN117203581A (ja) |
| WO (1) | WO2022219984A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006331052A (ja) * | 2005-05-26 | 2006-12-07 | Konica Minolta Holdings Inc | 駆動装置および駆動方法 |
| JP2013182138A (ja) * | 2012-03-02 | 2013-09-12 | Nidec Sankyo Corp | 光学装置 |
| US20180149142A1 (en) * | 2015-05-26 | 2018-05-31 | Cambridge Mechatronics Limited | Assembly method for a shape memory alloy actuator arrangement |
-
2022
- 2022-03-14 JP JP2023514523A patent/JPWO2022219984A1/ja active Pending
- 2022-03-14 WO PCT/JP2022/011224 patent/WO2022219984A1/ja active Application Filing
- 2022-03-14 CN CN202280028365.8A patent/CN117203581A/zh active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006331052A (ja) * | 2005-05-26 | 2006-12-07 | Konica Minolta Holdings Inc | 駆動装置および駆動方法 |
| JP2013182138A (ja) * | 2012-03-02 | 2013-09-12 | Nidec Sankyo Corp | 光学装置 |
| US20180149142A1 (en) * | 2015-05-26 | 2018-05-31 | Cambridge Mechatronics Limited | Assembly method for a shape memory alloy actuator arrangement |
Also Published As
| Publication number | Publication date |
|---|---|
| CN117203581A (zh) | 2023-12-08 |
| JPWO2022219984A1 (ja) | 2022-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6563547B2 (ja) | レンズ駆動装置 | |
| JP6391584B2 (ja) | カメラレンズ要素用のサスペンションシステム | |
| JP2013546023A (ja) | 形状記憶合金作動装置 | |
| CN113196127B (zh) | 透镜驱动装置以及相机模块 | |
| KR20060010792A (ko) | 구동 장치 | |
| CN115398101A (zh) | 致动器组件 | |
| WO2022219984A1 (ja) | モジュール駆動装置及び光学装置 | |
| WO2022209627A1 (ja) | 撮像素子駆動装置及びカメラモジュール | |
| CN212379695U (zh) | 一种防抖马达 | |
| WO2022209645A1 (ja) | カメラモジュール | |
| JP5651303B2 (ja) | レンズ保持ユニット | |
| WO2023223945A1 (ja) | モジュール駆動装置及び光学装置 | |
| CN114460788A (zh) | 透镜驱动装置以及相机模块 | |
| JP2024034361A (ja) | 光学装置 | |
| WO2023223944A1 (ja) | モジュール駆動装置及び光学装置 | |
| JP7295921B2 (ja) | レンズ駆動装置及びカメラモジュール | |
| JP7378287B2 (ja) | レンズ駆動装置及びカメラモジュール | |
| JP7304946B2 (ja) | レンズ駆動装置、カメラモジュール、及びレンズ駆動装置の製造方法 | |
| JP7467762B2 (ja) | 光学素子駆動装置 | |
| CN215264191U (zh) | 透镜驱动装置以及相机模块 | |
| CN114460789A (zh) | 透镜驱动装置以及相机模块 | |
| CN114647127B (zh) | 透镜驱动装置以及相机模块 | |
| CN113267868B (zh) | 透镜驱动装置以及相机模块 | |
| CN114391119B (zh) | 透镜驱动装置及相机模块 | |
| CN115576148A (zh) | 光学模块驱动装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22787910 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023514523 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22787910 Country of ref document: EP Kind code of ref document: A1 |