WO2022196776A1 - ショベル - Google Patents
ショベル Download PDFInfo
- Publication number
- WO2022196776A1 WO2022196776A1 PCT/JP2022/012421 JP2022012421W WO2022196776A1 WO 2022196776 A1 WO2022196776 A1 WO 2022196776A1 JP 2022012421 W JP2022012421 W JP 2022012421W WO 2022196776 A1 WO2022196776 A1 WO 2022196776A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- controller
- sand
- earth
- bucket
- hole
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images























Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
- E02F3/437—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like providing automatic sequences of movements, e.g. linear excavation, keeping dipper angle constant
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/261—Surveying the work-site to be treated
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
- E02F3/439—Automatic repositioning of the implement, e.g. automatic dumping, auto-return
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/261—Surveying the work-site to be treated
- E02F9/262—Surveying the work-site to be treated with follow-up actions to control the work tool, e.g. controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/264—Sensors and their calibration for indicating the position of the work tool
- E02F9/265—Sensors and their calibration for indicating the position of the work tool with follow-up actions (e.g. control signals sent to actuate the work tool)
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/205—Remotely operated machines, e.g. unmanned vehicles
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2282—Systems using center bypass type changeover valves
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2296—Systems with a variable displacement pump
Definitions
- the undercarriage 1 of the excavator 100 includes a crawler 1C.
- the crawler 1 ⁇ /b>C is driven by a traveling hydraulic motor 2 ⁇ /b>M mounted on the lower traveling body 1 .
- the crawler 1C includes a left crawler 1CL and a right crawler 1CR.
- the left crawler 1CL is driven by a left traveling hydraulic motor 2ML
- the right crawler 1CR is driven by a right traveling hydraulic motor 2MR.
- the object detection device 70 is configured to detect objects existing around the excavator 100 .
- Objects are, for example, people, animals, vehicles, construction machines, buildings, walls, fences, or holes.
- the object detection device 70 is, for example, an ultrasonic sensor, millimeter wave radar, stereo camera, LIDAR, distance image sensor, infrared sensor, or the like.
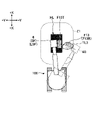
- the object detection device 70 includes a front sensor 70F attached to the front end of the upper surface of the cabin 10, a rear sensor 70B attached to the rear end of the upper surface of the upper revolving structure 3, and a left end of the upper surface of the upper revolving structure 3. and a right sensor 70R attached to the right end of the upper surface of the upper revolving body 3 .
- Each sensor consists of LIDAR.
- the controller 30 increases the discharge amount of the left main pump 14L, causes a sufficient amount of hydraulic oil to flow into the hydraulic actuator to be operated, and ensures the driving of the hydraulic actuator to be operated. Note that the controller 30 similarly controls the discharge amount of the right main pump 14R.
- the controller 30 supplies hydraulic oil discharged from the pilot pump 15 to the right pilot port of the control valve 176L and the left pilot port of the control valve 176R via the proportional valve 31AL in response to the arm closing operation by the operator. can.
- the controller 30 supplies hydraulic oil discharged from the pilot pump 15 to the right pilot port of the control valve 176L and the left pilot port of the control valve 176R via the proportional valve 31AL, regardless of the arm closing operation by the operator. can. That is, the controller 30 can close the arm 5 according to the arm closing operation by the operator or regardless of the arm closing operation by the operator.
- the operation pressure sensor 29LB detects the content of the operator's operation of the left operation lever 26L in the horizontal direction, and outputs the detected value to the controller 30.
- the controller 30 determines the three-dimensional coordinates (Xer, Yer , Zer).
- the three-dimensional coordinates (Xer, Yer, Zer) of the control reference point after the elapse of the unit time are, for example, the coordinates on the target trajectory.
- the unit time is, for example, time corresponding to an integral multiple of the control period.
- the controller 30 feeds back the boom angle ⁇ 1 detected by the boom angle sensor S1 as the current value of the boom angle ⁇ 1 used when generating the boom cylinder pilot pressure command.
- the bucket control mechanism 31C is configured to apply a pilot pressure corresponding to the control current corresponding to the bucket cylinder pilot pressure command to the control valve 174 as a bucket control valve.
- Bucket control mechanism 31C may be, for example, proportional valve 31CL and proportional valve 31CR in FIG. 3C.
- the swing control mechanism 31D is configured to apply a pilot pressure corresponding to a control current corresponding to a swing hydraulic motor pilot pressure command to the control valve 173 as a swing control valve.
- the swivel control mechanism 31D may be, for example, the proportional valve 31DL and the proportional valve 31DR in FIG. 3D.
- the controller 30 performs one control of calculation of the three-dimensional coordinates (Xer, Yer, Zer), generation of the command values ⁇ 1r , ⁇ 2r , ⁇ 3r and ⁇ 1r , and determination of the discharge amount of the main pump 14. Autonomous control is executed by repeating this control cycle. Further, the controller 30 improves the accuracy of autonomous control by feedback-controlling the control reference point based on the respective outputs of the boom angle sensor S1, the arm angle sensor S2, the bucket angle sensor S3, and the turning angular velocity sensor S5. can be done. Specifically, the controller 30 improves the accuracy of the autonomous control by feedback-controlling the flow rate of hydraulic oil flowing into each of the boom cylinder 7, the arm cylinder 8, the bucket cylinder 9, and the turning hydraulic motor 2A. can be done.
- the target trajectory TL3 which is part of the target trajectory TL for the first push-away operation, is represented by a dashed line.
- a solid line represents the state of the bucket 6 when the first pushing operation is completed, and a broken line represents the position of the bucket 6 when the first pushing operation is started.
- FIG. 11 shows the earth and sand F13T pushed into the hole HL by the first push-away operation among the earth and sand forming the earth and sand pile F13, and the first earth and sand forming the earth and sand pile F10.
- the solid line represents the soil F13B that remains after the pushing operation is performed.
- a mound of earth and sand existing within a range of a predetermined distance from the hole HL is a mound of earth and sand that is pushed into the hole HL by a pushing action, and is hereinafter referred to as an "adjacent mound of earth and sand.”
- the controller 30 recognizes that the mound F14 exists as an adjacent mound on the -X side of the hole HL (the side closer to the excavator 100). Therefore, the controller 30 calculates the volume of the earth and sand forming the earth and sand heap F14.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Paleontology (AREA)
- Operation Control Of Excavators (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023507188A JP7843747B2 (ja) | 2021-03-17 | 2022-03-17 | ショベル |
| CN202280021816.5A CN116997698A (zh) | 2021-03-17 | 2022-03-17 | 挖土机 |
| DE112022001571.3T DE112022001571T5 (de) | 2021-03-17 | 2022-03-17 | Bagger |
| US18/466,256 US20230417024A1 (en) | 2021-03-17 | 2023-09-13 | Shovel |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-044182 | 2021-03-17 | ||
| JP2021044182 | 2021-03-17 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/466,256 Continuation US20230417024A1 (en) | 2021-03-17 | 2023-09-13 | Shovel |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022196776A1 true WO2022196776A1 (ja) | 2022-09-22 |
Family
ID=83321105
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/012421 Ceased WO2022196776A1 (ja) | 2021-03-17 | 2022-03-17 | ショベル |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230417024A1 (https=) |
| JP (1) | JP7843747B2 (https=) |
| CN (1) | CN116997698A (https=) |
| DE (1) | DE112022001571T5 (https=) |
| WO (1) | WO2022196776A1 (https=) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024057971A (ja) * | 2022-10-13 | 2024-04-25 | 住友重機械工業株式会社 | ショベル |
| JP2024073207A (ja) * | 2022-11-17 | 2024-05-29 | 住友重機械工業株式会社 | ショベル、ショベルの制御装置、及び機械学習装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS595655U (ja) * | 1982-07-01 | 1984-01-14 | 株式会社クボタ | 掘削作業車 |
| US20180245308A1 (en) * | 2017-01-23 | 2018-08-30 | Built Robotics Inc. | Excavating earth from a dig site using an excavation vehicle |
| WO2020166673A1 (ja) * | 2019-02-15 | 2020-08-20 | 住友重機械工業株式会社 | ショベル |
| JP2021008776A (ja) * | 2019-07-02 | 2021-01-28 | 住友建機株式会社 | ショベル |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5854988A (en) * | 1996-06-05 | 1998-12-29 | Topcon Laser Systems, Inc. | Method for controlling an excavator |
| JP3782251B2 (ja) * | 1999-03-31 | 2006-06-07 | 株式会社神戸製鋼所 | 蓄電器を備えた作業機械 |
| JP5148266B2 (ja) * | 2005-01-31 | 2013-02-20 | 株式会社小松製作所 | チルトフロアを備えた作業車両 |
| US7934329B2 (en) | 2008-02-29 | 2011-05-03 | Caterpillar Inc. | Semi-autonomous excavation control system |
| US9677251B2 (en) * | 2014-06-02 | 2017-06-13 | Komatsu Ltd. | Construction machine control system, construction machine, and method of controlling construction machine |
| CN107709674B (zh) * | 2015-06-16 | 2021-04-09 | 科派克系统公司 | 用于确定竖直位置的方法和电子控制单元 |
| US10975552B2 (en) * | 2016-09-16 | 2021-04-13 | Komatsu Ltd. | Control system and method for work vehicle |
| US10867377B2 (en) * | 2016-12-21 | 2020-12-15 | Massachusetts Institute Of Technology | Determining soil state and controlling equipment based on captured images |
| EP3770333A4 (en) * | 2018-03-20 | 2021-03-24 | Sumitomo Heavy Industries, Ltd. | SHOVEL |
| JP6942671B2 (ja) * | 2018-04-26 | 2021-09-29 | 株式会社小松製作所 | 寸法特定装置および寸法特定方法 |
| US20200032490A1 (en) * | 2018-07-26 | 2020-01-30 | Built Robotics Inc. | Filling earth at a location within a dig site using an excavation vehicle |
| JP7204366B2 (ja) * | 2018-07-31 | 2023-01-16 | 株式会社小松製作所 | 作業機械を制御するためのシステム及び方法 |
| KR102685684B1 (ko) | 2018-11-14 | 2024-07-15 | 스미도모쥬기가이고교 가부시키가이샤 | 쇼벨, 쇼벨의 제어장치 |
| KR102785874B1 (ko) * | 2019-02-04 | 2025-03-21 | 스미도모쥬기가이고교 가부시키가이샤 | 쇼벨 |
| JP7412918B2 (ja) | 2019-08-01 | 2024-01-15 | 住友重機械工業株式会社 | ショベル |
| JP7101153B2 (ja) | 2019-09-12 | 2022-07-14 | 三洋化成工業株式会社 | 正極活物質の選択的取出方法 |
-
2022
- 2022-03-17 WO PCT/JP2022/012421 patent/WO2022196776A1/ja not_active Ceased
- 2022-03-17 DE DE112022001571.3T patent/DE112022001571T5/de active Pending
- 2022-03-17 JP JP2023507188A patent/JP7843747B2/ja active Active
- 2022-03-17 CN CN202280021816.5A patent/CN116997698A/zh active Pending
-
2023
- 2023-09-13 US US18/466,256 patent/US20230417024A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS595655U (ja) * | 1982-07-01 | 1984-01-14 | 株式会社クボタ | 掘削作業車 |
| US20180245308A1 (en) * | 2017-01-23 | 2018-08-30 | Built Robotics Inc. | Excavating earth from a dig site using an excavation vehicle |
| WO2020166673A1 (ja) * | 2019-02-15 | 2020-08-20 | 住友重機械工業株式会社 | ショベル |
| JP2021008776A (ja) * | 2019-07-02 | 2021-01-28 | 住友建機株式会社 | ショベル |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024057971A (ja) * | 2022-10-13 | 2024-04-25 | 住友重機械工業株式会社 | ショベル |
| JP2024073207A (ja) * | 2022-11-17 | 2024-05-29 | 住友重機械工業株式会社 | ショベル、ショベルの制御装置、及び機械学習装置 |
| US12612760B2 (en) | 2022-11-17 | 2026-04-28 | Sumitomo Heavy Industries, Ltd. | Shovel, shovel control device, and machine learning device |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230417024A1 (en) | 2023-12-28 |
| CN116997698A (zh) | 2023-11-03 |
| JPWO2022196776A1 (https=) | 2022-09-22 |
| JP7843747B2 (ja) | 2026-04-10 |
| DE112022001571T5 (de) | 2024-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102602384B1 (ko) | 쇼벨 | |
| JP7307051B2 (ja) | ショベル | |
| JP7721442B2 (ja) | ショベル、ショベルの制御装置、及びショベルの管理システム | |
| JP7383599B2 (ja) | ショベル | |
| JP7522553B2 (ja) | ショベル | |
| CN113039326A (zh) | 挖土机、挖土机的控制装置 | |
| JP7478590B2 (ja) | ショベル | |
| JPWO2019189920A1 (ja) | 作業機械、情報処理装置 | |
| JP2021025258A (ja) | ショベル | |
| CN113039327A (zh) | 挖土机、挖土机的控制装置 | |
| JP2021059945A (ja) | ショベル | |
| US20230417024A1 (en) | Shovel | |
| WO2022202918A1 (ja) | ショベル及びショベルの施工支援システム | |
| WO2022210776A1 (ja) | ショベル | |
| JP2022154722A (ja) | ショベル | |
| JP2024073207A (ja) | ショベル、ショベルの制御装置、及び機械学習装置 | |
| JP2025101388A (ja) | ショベル及びショベルの制御装置 | |
| JP2025047158A (ja) | 作業機械 | |
| JP2024001736A (ja) | ショベル | |
| JP2025095693A (ja) | ショベル | |
| JP2023151687A (ja) | ショベル | |
| CN120231353A (zh) | 施工机械以及远程支援系统 | |
| JP2024155512A (ja) | 作業機械 | |
| JP2025105496A (ja) | 作業機械及び遠隔支援システム | |
| JP2024134943A (ja) | ショベル |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22771521 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023507188 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280021816.5 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112022001571 Country of ref document: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22771521 Country of ref document: EP Kind code of ref document: A1 |