WO2022196242A1 - 遠隔操縦装置 - Google Patents
遠隔操縦装置 Download PDFInfo
- Publication number
- WO2022196242A1 WO2022196242A1 PCT/JP2022/006559 JP2022006559W WO2022196242A1 WO 2022196242 A1 WO2022196242 A1 WO 2022196242A1 JP 2022006559 W JP2022006559 W JP 2022006559W WO 2022196242 A1 WO2022196242 A1 WO 2022196242A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- display
- communication
- control device
- remote control
- predicted trajectory
- Prior art date
Links
- 238000004891 communication Methods 0.000 claims abstract description 118
- 230000005540 biological transmission Effects 0.000 claims description 28
- 238000000034 method Methods 0.000 description 21
- 230000008569 process Effects 0.000 description 20
- 238000010586 diagram Methods 0.000 description 12
- 230000006870 function Effects 0.000 description 6
- 239000003921 oil Substances 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000009412 basement excavation Methods 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000010720 hydraulic oil Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images










Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/205—Remotely operated machines, e.g. unmanned vehicles
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2225—Control of flow rate; Load sensing arrangements using pressure-compensating valves
- E02F9/2228—Control of flow rate; Load sensing arrangements using pressure-compensating valves including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2232—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps
- E02F9/2235—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/261—Surveying the work-site to be treated
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/264—Sensors and their calibration for indicating the position of the work tool
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/267—Diagnosing or detecting failure of vehicles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/02—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving vehicles; peculiar to engines driving variable pitch propellers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0011—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement
- G05D1/0038—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement by providing the operator with simple or augmented images from one or more cameras located onboard the vehicle, e.g. tele-operation
-
- G05D1/2247—
-
- G05D1/226—
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/181—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a plurality of remote sources
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/40—Special vehicles
- B60Y2200/41—Construction vehicles, e.g. graders, excavators
- B60Y2200/412—Excavators
-
- G05D2105/05—
-
- G05D2109/10—
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Physics & Mathematics (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Fluid Mechanics (AREA)
- Aviation & Aerospace Engineering (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Operation Control Of Excavators (AREA)
Abstract
Description
<基本構成>
図1は、本発明の第1実施形態に係る作業機械1の遠隔操縦システム100の例を示す図である。遠隔操縦システム100は、作業機械1を遠隔操作する。本実施形態においては、作業機械1が油圧ショベルであることとする。図2は、本発明の第1実施形態に係る油圧ショベル(作業機械)1の制御コントローラを油圧駆動装置と共に示す図であり、図3は、図2中の電磁弁ユニット160の詳細図である。
図3に示すように、電磁弁ユニット(図3ではフロント制御用油圧ユニット部分のみを表示)160は、一次ポート側がポンプライン143aを介してパイロットポンプ30に接続され、パイロットポンプ30からのパイロット圧を減圧してパイロットライン144a~146bに出力する電磁比例弁54a~56bと、図3では紙面の都合上省略しているが(図2を併せて参照)、同様にパイロットポンプ30からのパイロット圧を減圧してパイロットライン147a~149bに出力する電磁比例弁57a~59bを備えている。
図4は、本実施形態に係る遠隔操縦装置200の遠隔操縦制御装置201が備えるハードウェア構成図である。図4において遠隔操縦制御装置201は、通信インターフェース211と、プロセッサである中央処理装置(CPU)212と、記憶装置であるリードオンリーメモリ(ROM)213及びランダムアクセスメモリ(RAM)214と、入力インターフェース215と、出力インターフェース216とを有している。
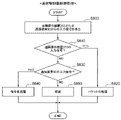
本実施形態の遠隔操縦制御装置201の予測軌跡演算部220で実施される演算フローを図6に示す。この制御フローは、図5で示す通信装置90からの信号が通信制御部222から入力されることで実施される。
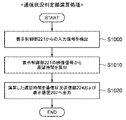
本実施形態の遠隔操縦制御装置201の表示制御部221で実施される制御フローを図7に示す。この制御フローは、図5で示す通信装置90からの信号が通信制御部222から入力され、予測軌跡演算部220からの演算結果が入力されることで実施される。
本実施形態の遠隔操縦制御装置201の通信制御部222で実施される制御フローを図8に示す。この制御フローは、図5で示す遠隔操作装置203または通信装置90から信号が入力されることで実施される。
上記のように、本実施形態の遠隔操縦装置200の制御装置(遠隔操縦制御装置)201は、車載カメラ91で撮影した作業現場のカメラ映像および作業機械(油圧ショベル)1の車体情報を受信する通信制御部222と、前記車体情報から前記作業機械(油圧ショベル)1の予測軌跡を演算し、表示装置202に映像として表示するための予測軌跡データを出力する予測軌跡演算部220と、前記カメラ映像と前記予測軌跡の映像とを前記表示装置202に同画面上で(同時に)表示させる表示制御部221と、を備える。
本発明の第2実施形態について図9~12を用いて説明する。図9は、本実施形態に係る遠隔操縦装置200aの遠隔操縦制御装置201aの機能ブロック図である。
通信状況判定部223は、表示制御部221から入力される映像信号の予測軌跡(疑似カメラ映像)と車載カメラ映像との差分から、油圧ショベル1と遠隔操縦装置200aの通信回線の伝送状況を判定する。その判定結果を、通信状況送信部224および表示装置202へ出力する。
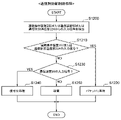
図10に本第2実施形態の遠隔操縦制御装置201aの通信状況判定部223の制御フローチャートを示す。この制御フローは、図9で示す表示制御部221の出力が入力されることで実施される。
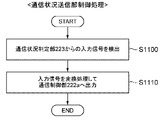
図11に本第2実施形態の遠隔操縦制御装置201aの通信状況送信部224の制御フローチャートを示す。この制御フローは、図9で示す通信状況判定部223の出力が入力されることで実施される。
本第2実施形態の遠隔操縦制御装置201aの通信制御部222aで実施される制御フローを図12に示す。この制御フローは、図9で示す遠隔操作装置203または通信装置90または通信状況送信部224から信号が入力されることで実施される。
本実施形態の油圧ショベル(作業機械)1は、通信状況送信部224から受信する通信状況判定部223の判定結果に応じて車体動作を抑制する。例えば、油圧ショベル1は、通信状況判定部223の判定結果である遅延時間に対する動作速度上限値のテーブルを持ち、通信状況判定部223の判定結果の遅延時間が大きくなればなるほど動作速度の上限値を抑制して遅く動作するようになる。あるいは、油圧ショベル1は、通信状況判定部223が通信途絶と判定した場合、全ての駆動部を停止させる。
上記のように、本実施形態の遠隔操縦装置200aは、前記カメラ映像と前記疑似カメラ映像との差分から前記作業機械(油圧ショベル)1と前記遠隔操縦装置200の通信回線の伝送状況を判定する通信状況判定部223をさらに備える。
2…作業フロント(作業装置)
3…走行体
4…走行油圧モータ
5…旋回油圧モータ
6…ブーム
7…アーム
8…バケット
9…バケットリンク
10…操作装置
11…エンジン
12…運転室
15…流量制御弁
16…負荷検出装置
20…油圧ポンプ
30…パイロットポンプ
31…車体傾斜角センサ
32…旋回角度センサ
39…ロック弁
40…制御コントローラ
54~59…電磁比例弁
61…ブームシリンダ
62…ブーム角度センサ
71…アームシリンダ
72…アーム角度センサ
81…バケットシリンダ
82…バケット角度センサ
90…通信装置
91…車載カメラ
100…遠隔操縦システム
143a…ポンプライン
144a~149b…パイロットライン
150a~155b…油圧駆動部
160…電磁弁ユニット
170…タンク
200…遠隔操縦装置
201…遠隔操縦制御装置(制御装置)
202…表示装置
203…遠隔操作装置
204…操縦席
211…通信インターフェース
212…中央処理装置(CPU)
213…リードオンリーメモリ(ROM)
214…ランダムアクセスメモリ(RAM)
215…入力インターフェース
216…出力インターフェース
220…予測軌跡演算部
221…表示制御部
222…通信制御部
223…通信状況判定部(第2実施形態)
224…通信状況送信部(第2実施形態)
Claims (8)
- 作業機械へ操作信号を送信して前記作業機械を遠隔地から操縦する制御装置を備えた遠隔操縦装置であって、
前記制御装置は、
カメラで撮影した作業現場のカメラ映像および前記作業機械の車体情報を受信する通信制御部と、
前記車体情報から前記作業機械の予測軌跡を演算し、表示装置に映像として表示するための予測軌跡データを出力する予測軌跡演算部と、
前記カメラ映像と前記予測軌跡の映像とを前記表示装置に同画面上で表示させる表示制御部と、を備える遠隔操縦装置。 - 前記表示制御部は、前記カメラ映像と前記予測軌跡の映像とを前記表示装置に同画面上で重畳して表示させる請求項1に記載の遠隔操縦装置。
- 前記表示制御部は、前記カメラ映像と前記予測軌跡の映像を前記表示装置に同画面上で異なる位置に表示させる請求項1に記載の遠隔操縦装置。
- 前記表示制御部は、前記予測軌跡に基づいて前記カメラから視た場合の前記作業機械の予測映像である疑似カメラ映像を生成し、前記カメラ映像と前記疑似カメラ映像とを前記表示装置に同画面上で重畳して表示させる請求項1に記載の遠隔操縦装置。
- 前記カメラ映像と前記疑似カメラ映像との差分から前記作業機械と前記遠隔操縦装置の通信回線の伝送状況を判定する通信状況判定部をさらに備える請求項4に記載の遠隔操縦装置。
- 前記通信状況判定部は、前記通信回線の伝送状況の判定結果を前記表示装置に表示させる請求項5に記載の遠隔操縦装置。
- 前記通信回線の伝送状況の判定結果を前記作業機械に送信する通信状況送信部をさらに備える請求項5に記載の遠隔操縦装置。
- 前記通信状況判定部により通信障害があったと判定された場合、前記通信回線の伝送状況の判定結果を前記作業機械に送信する通信状況送信部をさらに備える請求項5に記載の遠隔操縦装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US18/023,513 US20230323630A1 (en) | 2021-03-15 | 2022-02-18 | Remote operation device |
| JP2023506893A JP7466055B2 (ja) | 2021-03-15 | 2022-02-18 | 遠隔操縦装置 |
| EP22771001.9A EP4311228A1 (en) | 2021-03-15 | 2022-02-18 | Remote operation device |
| CN202280005784.XA CN116034200A (zh) | 2021-03-15 | 2022-02-18 | 远程操纵装置 |
| KR1020237006235A KR20230044253A (ko) | 2021-03-15 | 2022-02-18 | 원격 조종 장치 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-041732 | 2021-03-15 | ||
| JP2021041732 | 2021-03-15 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022196242A1 true WO2022196242A1 (ja) | 2022-09-22 |
Family
ID=83322296
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/006559 WO2022196242A1 (ja) | 2021-03-15 | 2022-02-18 | 遠隔操縦装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20230323630A1 (ja) |
| EP (1) | EP4311228A1 (ja) |
| JP (1) | JP7466055B2 (ja) |
| KR (1) | KR20230044253A (ja) |
| CN (1) | CN116034200A (ja) |
| WO (1) | WO2022196242A1 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012066724A (ja) * | 2010-09-24 | 2012-04-05 | Denso Corp | 車両用の後退駐車支援装置および後退駐車支援装置用のプログラム |
| JP2014004930A (ja) * | 2012-06-25 | 2014-01-16 | Aisin Seiki Co Ltd | 駐車支援装置、駐車支援方法、及び駐車支援プログラム |
| JP2014071778A (ja) * | 2012-09-28 | 2014-04-21 | Equos Research Co Ltd | 車両 |
| JP2018152652A (ja) * | 2017-03-10 | 2018-09-27 | 株式会社Jvcケンウッド | 運転支援装置、運転支援方法およびプログラム |
| JP2019054464A (ja) | 2017-09-15 | 2019-04-04 | 株式会社小松製作所 | 表示システム、表示方法、及び表示装置 |
| JP2020132431A (ja) * | 2019-02-21 | 2020-08-31 | 株式会社豊田自動織機 | 産業車両用走行支援装置 |
-
2022
- 2022-02-18 KR KR1020237006235A patent/KR20230044253A/ko unknown
- 2022-02-18 JP JP2023506893A patent/JP7466055B2/ja active Active
- 2022-02-18 EP EP22771001.9A patent/EP4311228A1/en active Pending
- 2022-02-18 US US18/023,513 patent/US20230323630A1/en active Pending
- 2022-02-18 CN CN202280005784.XA patent/CN116034200A/zh active Pending
- 2022-02-18 WO PCT/JP2022/006559 patent/WO2022196242A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012066724A (ja) * | 2010-09-24 | 2012-04-05 | Denso Corp | 車両用の後退駐車支援装置および後退駐車支援装置用のプログラム |
| JP2014004930A (ja) * | 2012-06-25 | 2014-01-16 | Aisin Seiki Co Ltd | 駐車支援装置、駐車支援方法、及び駐車支援プログラム |
| JP2014071778A (ja) * | 2012-09-28 | 2014-04-21 | Equos Research Co Ltd | 車両 |
| JP2018152652A (ja) * | 2017-03-10 | 2018-09-27 | 株式会社Jvcケンウッド | 運転支援装置、運転支援方法およびプログラム |
| JP2019054464A (ja) | 2017-09-15 | 2019-04-04 | 株式会社小松製作所 | 表示システム、表示方法、及び表示装置 |
| JP2020132431A (ja) * | 2019-02-21 | 2020-08-31 | 株式会社豊田自動織機 | 産業車両用走行支援装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20230044253A (ko) | 2023-04-03 |
| US20230323630A1 (en) | 2023-10-12 |
| CN116034200A (zh) | 2023-04-28 |
| JP7466055B2 (ja) | 2024-04-11 |
| EP4311228A1 (en) | 2024-01-24 |
| JPWO2022196242A1 (ja) | 2022-09-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108699799B (zh) | 作业机械 | |
| EP3604694B1 (en) | Work machine | |
| KR102091504B1 (ko) | 건설 기계 | |
| KR102399329B1 (ko) | 작업 기계 | |
| WO2018051511A1 (ja) | 作業機械 | |
| US20210164194A1 (en) | Shovel | |
| CN110050130B (zh) | 工程机械 | |
| CN111032969B (zh) | 作业机械 | |
| EP3951077A1 (en) | Excavator and construction system | |
| KR102154581B1 (ko) | 작업 기계 | |
| CN113039327B (zh) | 挖土机、挖土机的控制装置 | |
| JPWO2018043299A1 (ja) | 作業機械の画像表示システム、作業機械の遠隔操作システム、作業機械及び作業機械の画像表示方法 | |
| WO2019189031A1 (ja) | ショベル | |
| CN114174595B (zh) | 挖土机及挖土机的控制装置 | |
| WO2022196242A1 (ja) | 遠隔操縦装置 | |
| CN113508206B (zh) | 工程机械 | |
| CN111433413A (zh) | 挖土机 | |
| CN112601864B (zh) | 作业机械 | |
| JP2023137156A (ja) | 作業機械 | |
| JP7161561B2 (ja) | 作業機械 | |
| US20240011243A1 (en) | Work machine and operating device for work machine | |
| JP2022157896A (ja) | 作業機械 | |
| JPH09195307A (ja) | 建設機械の干渉防止装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22771001 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 20237006235 Country of ref document: KR Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2023506893 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022771001 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022771001 Country of ref document: EP Effective date: 20231016 |