WO2022176352A1 - 農業機械、農作業支援装置、農作業支援システム - Google Patents
農業機械、農作業支援装置、農作業支援システム Download PDFInfo
- Publication number
- WO2022176352A1 WO2022176352A1 PCT/JP2021/046011 JP2021046011W WO2022176352A1 WO 2022176352 A1 WO2022176352 A1 WO 2022176352A1 JP 2021046011 W JP2021046011 W JP 2021046011W WO 2022176352 A1 WO2022176352 A1 WO 2022176352A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- work
- vehicle body
- unit
- traveling vehicle
- route
- Prior art date
Links
- 239000000463 material Substances 0.000 claims abstract description 207
- 238000001514 detection method Methods 0.000 claims abstract description 24
- 238000004364 calculation method Methods 0.000 claims description 49
- 238000000034 method Methods 0.000 claims description 26
- 238000004891 communication Methods 0.000 claims description 17
- 238000003860 storage Methods 0.000 description 51
- 230000005540 biological transmission Effects 0.000 description 16
- 230000006399 behavior Effects 0.000 description 12
- 238000012790 confirmation Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 7
- 238000005507 spraying Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 239000010720 hydraulic oil Substances 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 239000003905 agrochemical Substances 0.000 description 3
- 239000003337 fertilizer Substances 0.000 description 3
- 230000033001 locomotion Effects 0.000 description 3
- 238000009331 sowing Methods 0.000 description 3
- 238000003971 tillage Methods 0.000 description 3
- 230000004720 fertilization Effects 0.000 description 2
- 238000003306 harvesting Methods 0.000 description 2
- 240000007594 Oryza sativa Species 0.000 description 1
- 235000007164 Oryza sativa Nutrition 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000010899 nucleation Methods 0.000 description 1
- 239000000575 pesticide Substances 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 235000009566 rice Nutrition 0.000 description 1
- 238000010079 rubber tapping Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images



























Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
- A01B69/007—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow
- A01B69/008—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow automatic
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0219—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory ensuring the processing of the whole working surface
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/229—Command input data, e.g. waypoints
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/648—Performing a task within a working area or space, e.g. cleaning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/15—Specific applications of the controlled vehicles for harvesting, sowing or mowing in agriculture or forestry
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/20—Land use
- G05D2107/21—Farming, e.g. fields, pastures or barns
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
Definitions
- the present invention relates to an agricultural machine that performs agricultural work while traveling in a field, and an agricultural work support device and an agricultural work support system that support the agricultural work.
- Patent Literature 1 discloses a technique for assisting farm work with a work device connected to the agricultural machine while automatically driving the agricultural machine in a field.
- the agricultural machine disclosed in Patent Document 1 includes an acquisition section, a work setting section, a material remaining amount detection section, and a material notification section.
- the acquisition unit acquires the position data of the outer periphery of the field.
- the work setting unit sets a work travel line, a turn line, a work start position, and a work end position along which the agricultural machine travels in the field based on position data of the outer circumference of the field.
- the material remaining amount detection unit detects the remaining amount of materials mounted on the agricultural machine.
- the materials notification unit notifies the driver that materials should be replenished at the edge of a ridge when the remaining amount of materials is low. After this notification, the agricultural machine receives a switch operation from the driver or automatically, after completing traveling and working along the currently positioned work traveling line, moves to a nearby ridge.
- Patent Document 1 when the remaining amount of materials becomes low during traveling work by automatic operation of agricultural machinery, the material notification unit notifies that materials should be replenished. However, after this, when the agricultural machine moved to the edge of a ridge where materials could be replenished, and showed a behavior different from the behavior during work, the user who saw the behavior misunderstood that it was dangerous, and the agricultural machine may cause an emergency stop. Such an emergency stop of agricultural machinery lowers the efficiency of replenishment of materials and the efficiency of agricultural work.
- An agricultural machine includes a traveling vehicle body that can travel, a connection part that can connect a work device for performing agricultural work to the traveling vehicle body, and a route that creates a traveling route for automatically driving the traveling vehicle body.
- a creation unit a replenishment setting unit that sets a replenishment position for replenishing materials used in agricultural work by a work device at a location outside the travel route, a position detection unit that detects the position of the traveling vehicle body, and the position of the traveling vehicle body.
- An automatic control unit that automatically drives the traveling vehicle body based on the traveling route and moves the traveling vehicle body to the replenishment position, and when the automatic control unit is automatically driving the traveling vehicle body, the traveling vehicle body is replenished. and a notification unit for notifying that the device is going to a location.
- the notification unit notifies multiple times at predetermined intervals that the traveling vehicle body is heading to the replenishment position before the traveling vehicle body heads to the replenishment position.
- the automatic control unit automatically runs the traveling vehicle body based on the position of the traveling vehicle body and the traveling route, and executes an automatic traveling work mode in which agricultural work is performed by the working device, and the automatic traveling mode is performed.
- the material supply mode is executed to automatically move the traveling vehicle body to the replenishment position.
- execution of the work mode based on the position of the traveling vehicle body and the replenishment position, it is notified that the traveling vehicle body is heading to the replenishment position.
- the notification unit notifies information indicating a decrease in the remaining amount of materials, a replenishment position, or behavior of the traveling vehicle body or the work device in the material replenishment mode.
- the traveling routes include a plurality of work routes for performing agricultural work with a working device while the traveling vehicle body is traveling, and a plurality of turning routes for turning the traveling vehicle body from one side of the working route to the other.
- the notification unit notifies that the traveling vehicle body is heading to the replenishment position when traveling based on the work route or turning route prior to when the traveling vehicle body is heading to the replenishment position.
- the remaining amount calculation unit calculates the remaining amount of materials based on the input amount of materials input to the work device and the consumption amount of materials consumed in farm work by the work device.
- the replenishment setting unit predicts a position where the remaining amount of materials drops below a predetermined threshold value by performing farm work with a working device while the traveling vehicle body is traveling, and sets one of the work routes including the reduced position as the traveling direction.
- a replenishment position is set on a line extended to the opposite side, and the notification unit sets a notification position on another work route in which the traveling vehicle body travels ahead of one of the work routes, and the traveling vehicle body passes through the notification position. When doing so, it notifies that the traveling vehicle body is headed for the replenishment position.
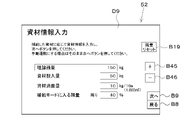
- an input unit for inputting the input amount of materials and the consumption amount of materials per unit area is provided, and before or during traveling by automatic operation of the traveling vehicle body, the remaining amount calculation unit: The amount of material input, the amount of material consumed per unit area, and the remaining amount of material are calculated based on the state of the traveling vehicle body and work equipment. , the notification unit sets the notification position based on the replenishment position.
- the agricultural machine includes a threshold changing unit that changes the threshold.
- the agricultural machine includes a display unit that displays the notification of the notification unit on a screen.
- the agricultural machine includes an alarm unit that issues an alarm by sound or light indicating the notification of the notification unit.
- An agricultural work support device includes a route creation unit that creates a travel route for automatically driving a travel vehicle body of an agricultural machine, and a work device that is connected to the travel vehicle body at a location deviated from the travel route. Based on the replenishment setting unit that sets the replenishment position for replenishing materials used during agricultural work, and the position of the traveling vehicle body and the travel route detected by the position detection unit, the agricultural machine automatically drives the traveling vehicle body. and a notification unit for notifying that the traveling vehicle body is headed for the replenishment position.
- the agricultural work support device includes a remaining amount calculation unit for calculating the remaining amount of materials necessary for the replenishment setting unit to set the replenishment position, and a parameter required for the remaining amount calculation unit to calculate the remaining amount of materials. and a display unit for displaying the travel route, the position of the traveling vehicle body, and the notification from the notification unit.
- An agricultural work support system includes a route creation unit that creates a travel route for automatically driving a travel vehicle body of an agricultural machine, and a work connected to the travel vehicle body at a location deviated from the travel route.
- a replenishment setting unit that sets a replenishment position for replenishing materials used by the device during farm work
- a position detection unit that detects the position of the traveling vehicle body, and the traveling vehicle body can be automatically operated based on the position of the traveling vehicle body and the traveling route.
- An automatic control unit that causes the vehicle to travel and moves the traveling vehicle body to the replenishment position, and the automatic control unit causes the traveling vehicle body to travel by automatic operation based on the position of the traveling vehicle body and the travel route detected by the position detection unit. and a notification unit for notifying that the traveling vehicle body is headed for the replenishment position.
- an agricultural work support system includes an agricultural machine and an agricultural work support device mounted on the agricultural machine, the agricultural machine comprising a position detection unit and an automatic control unit, the agricultural work support device has a route creation section, a replenishment setting section, a notification section, and a communication section for communicating with the automatic control section and the position detection section.
- FIG. 1 is a configuration diagram of an agricultural work support system; FIG. It is a perspective view of a lifting device. It is a figure which shows an example of the home screen of an agricultural-work assistance apparatus. It is a figure which shows an example of the agricultural field registration screen of an agricultural-work assistance apparatus. It is a figure for demonstrating the registration method of an agricultural field. It is a figure for demonstrating the registration method of another agricultural field. It is a figure for demonstrating the registration method of another agricultural field. It is a figure which shows an example of the work selection screen of an agricultural-work assistance apparatus. It is a figure which shows an example of the vehicle setting confirmation screen of an agricultural-work assistance apparatus. It is a figure which shows an example of the agricultural field selection screen of an agricultural-work assistance apparatus.
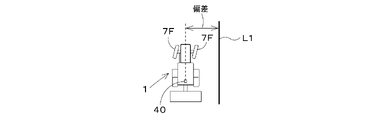
- FIG. 1 is an overall side view of a working vehicle
- FIG. 24 is an overall side view of the agricultural machine 1.
- the agricultural machine 1 of this embodiment is configured as a tractor.
- the agricultural machine 1 is not limited to a tractor, and may be configured by other agricultural machines such as a rice transplanter or a combine harvester, or a work vehicle other than a tractor for performing farm work.
- the agricultural machine 1 includes a traveling vehicle body 3 , a prime mover 4 , a transmission 5 and a traveling device 7 .
- the travel device 7 has front wheels 7F and rear wheels 7R.
- the front wheel 7F may be of a tire type or a crawler type.
- the rear wheel 7R may be of a tire type or a crawler type.
- the prime mover 4 is composed of a diesel engine, an electric motor, or the like.
- the transmission device 5 can switch the driving force of the traveling device 7 by shifting gears, and can switch the traveling device 7 between forward and reverse.
- the driving force of the prime mover 4 is transmitted to the traveling device 7 by the transmission device 5, and the traveling device 7 is driven, so that the traveling vehicle body 3 travels back and forth. 24, the left side is the front of the traveling vehicle body 3, and the right side is the rear of the traveling vehicle body 3. As shown in FIG.
- a cabin 9 is provided in the traveling vehicle body 3 .
- a driver's seat 10 is provided inside the cabin 9 .
- a lifting device 8 composed of a three-point link mechanism or the like is provided at the rear portion of the traveling vehicle body 3 .
- the lifting device 8 is provided with connecting portions 8g and 8h to which the working device 2 for agricultural work can be connected. By connecting the working device 2 to the connecting portions 8g and 8h, the working device 2 and the traveling vehicle body 3 are connected, and the traveling vehicle body 3 can tow the working device 2. As shown in FIG.
- the work device 2 performs ground work on the field.
- the work device 2 includes a cultivator (rotary cultivator) for tilling a field, a rough cultivator (stubble cultivator) for rough plowing, a peddler for peddling (drive harrow), fertilizers, pesticides, and the like.
- a spraying device for spraying, a sowing device for sowing seeds, a transplanting device for transplanting seedlings, a harvesting device for harvesting, and the like are included.
- FIG. 1 is a configuration diagram of an agricultural work support system 100. As shown in FIG.
- the agricultural work support system 100 includes an agricultural work support device 50 .
- the agricultural work support system 100 and the agricultural work support device 50 support agricultural work by the work device 2 while the traveling vehicle body 3 of the agricultural machine 1 is running in the field.
- the agricultural machine 1 includes a control device 60 , an operation section 62 , a transmission device 5 , a braking device 6 , a steering device 29 , an elevating device 8 , a positioning device 40 and an alarm section 63 .
- an in-vehicle network N1 such as LAN or CAN is built in the agricultural machine 1 .
- the control device 60, the operation unit 62, the positioning device 40, and the alarm unit 63 are connected to the in-vehicle network N1.
- These units 60 , 62 , 5 , 6 , 29 , 8 , 40 , 63 and N 1 provided in the agricultural machine 1 are included in the agricultural work support system 100 .
- the control device 60 is composed of an electric circuit including a CPU and a memory.
- the control device 60 controls operations of each part of the agricultural machine 1 .
- the control device 60 is provided with an automatic control section 61 that controls the operation of the traveling vehicle body 3 ( FIG. 24 ) of the agricultural machine 1 and the working device 2 .
- the operation unit 62 includes switches, levers, pedals, and other keys that can be operated by a user such as a driver sitting in the driver's seat 10 or a worker near the agricultural machine 1 .
- the operation section 62 includes a mode switch 65 .
- the mode switch 65 is operated to switch modes of the agricultural machine 1 .
- the transmission 5 is connected to the control valve 37.
- the control valve 37 is an electromagnetic valve that operates based on a control signal sent from the control device 60 . Hydraulic oil discharged from the hydraulic pump 33 is supplied to the control valve 37 . Although the control valve 37 is shown by one block in FIG.
- the automatic control unit 61 controls the driving of the transmission 5 by electrically controlling the switching position and opening of the control valve 37 .
- the transmission device 5 transmits the driving force of the prime mover 4 to the traveling device 7, whereby the traveling device 7 is operated to cause the traveling vehicle body 3 to travel forward and backward. Further, for example, when the work device 2 is a ground work device, the transmission 5 transmits the driving force of the prime mover 4 to the work device 2 . As a result, the operating force of the working device 2 is increased.
- the automatic control unit 61 communicates with the work device 2 via the in-vehicle network N1.
- the work device 2 includes a control section and a communication section (not shown).
- the automatic control unit 61 transmits a work command to the work device 2 via the in-vehicle network N1.
- the control unit of the work device 2 controls the operation of each part of the work device 2 based on the work command to perform farm work (ground work).
- the control unit of the working device 2 transmits information and data indicating the working state and the like to the control device 60 via the in-vehicle network N1 by the communication unit.
- the automatic control unit 61 detects the working state of the work device 2 based on the information and data received from the work device 2 via the in-vehicle network N1.
- the braking device 6 is connected to the control valve 38.
- the control valve 38 is an electromagnetic valve that operates based on control signals sent from the control device 60 . Hydraulic oil discharged from the hydraulic pump 33 is supplied to the control valve 38 .
- the automatic control unit 61 electrically controls the switching position and the opening degree of the control valve 38 to operate the braking device 6 to brake the traveling vehicle body 3 .
- the steering device 29 has a handle (steering wheel) 30 , a rotating shaft (steering shaft) 31 and an auxiliary mechanism (power steering mechanism) 32 .
- the handle 30 is provided inside the cabin 9 (Fig. 24).
- the rotating shaft 31 rotates as the handle 30 rotates.
- the assist mechanism 32 assists steering by the handle 30 .
- the auxiliary mechanism 32 includes a control valve 34 and a steering cylinder 35.
- Control valve 34 is an electromagnetic valve that operates based on a control signal sent from control device 60 .
- the control valve 34 is composed of a three-position switching valve that can be switched by movement of a spool or the like. Hydraulic oil discharged from the hydraulic pump 33 is supplied to the control valve 34 .
- the control device 60 electrically controls the switching position and opening degree of the control valve 34 to adjust the hydraulic pressure supplied to the steering cylinder 35 to extend and retract the steering cylinder 35 .
- the steering cylinder 35 is connected to a knuckle arm (not shown) that turns the front wheels 7F.
- the control valve 34 can also be switched by steering the steering shaft 31 . Specifically, by operating the steering wheel 30, the steering shaft 31 rotates according to the operating state, and the switching position and the opening degree of the control valve 34 are switched.
- the steering cylinder 35 expands and contracts leftward or rightward of the traveling vehicle body 3 according to the switching position and opening degree of the control valve 34 . This telescopic motion of the steering cylinder 35 changes the steering direction of the front wheels 7F.
- the steering device 29 described above is merely an example, and is not limited to the configuration described above.
- the traveling vehicle body 3 of the agricultural machine 1 can be manually steered by manually operating the steering wheel 30 and automatically steered by the automatic control unit 61 . Further, the traveling vehicle body 3 can travel and stop by driving the transmission device 5 and the braking device 6 in response to manual operation of an accelerator member and a brake member (both not shown) provided in the operation unit 62 . Furthermore, the traveling vehicle body 3 can automatically travel and stop according to the control of the transmission device 5 and the braking device 6 by the automatic control unit 61 .
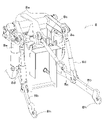
- FIG. 2 is a perspective view of the lifting device 8.
- the lifting device 8 has a lift arm 8a, a lower link 8b, a top link 8c, a lift rod 8d and a lift cylinder 8e.
- a front end portion of the lift arm 8a is supported so as to be capable of swinging upward or downward in the upper rear portion of a case (transmission case) that houses the transmission 5 (FIG. 24).
- the lift arm 8a swings (moves up and down) by being driven by a lift cylinder 8e.
- the lift cylinder 8e is composed of a hydraulic cylinder.
- the lift cylinder 8e is connected with the control valve 36 shown in FIG.
- the control valve 36 is an electromagnetic valve that operates based on control signals sent from the control device 60 . Hydraulic oil discharged from the hydraulic pump 33 is supplied to the control valve 36 .
- the front end portion of the lower link 8b shown in FIG. 2 is supported by the lower rear portion of the transmission 5 (FIGS. 1 and 24) so as to be able to swing upward or downward.
- a front end portion of the top link 8c is supported by the rear portion of the transmission 5 above the lower link 8b so as to be able to swing upward or downward.
- the lift rod 8d connects the lift arm 8a and the lower link 8b.
- Connecting portions 8g and 8h to which the working device 2 can be connected are provided at rear end portions of the lower link 8b and the top link 8c.
- the automatic control unit 61 shown in FIG. 1 electrically controls the switching position and the opening degree of the control valve 36, thereby adjusting the hydraulic pressure supplied to the lift cylinder 8e shown in FIG. .
- the extension and contraction of the lift cylinder 8e raises and lowers the lift arm 8a and the lower link 8b connected to the lift arm 8a via the lift rod 8d.
- the working device 2 swings upward or downward (elevates) around the front portion of the lower link 8b (the side opposite to the connecting portions 8g and 8h) as a fulcrum.
- the positioning device 40 shown in FIG. 1 has a receiving device 41 and an inertial measurement unit (IMU: Inertial Measurement Unit) 42 .
- the receiving device 41 receives satellite signals (positions of positioning satellites, transmission times, correction information, etc.) transmitted from satellite positioning systems (positioning satellites) such as D-GPS, GPS, GLONASS, Hokuto, Galileo, and Michibiki.
- the positioning device 40 detects the current position (for example, latitude and longitude) based on the satellite signals received by the receiving device 41 . That is, the positioning device 40 is a position detector that detects the position of the traveling vehicle body 3 of the agricultural machine 1 .
- the inertial measurement device 42 has an acceleration sensor, a gyro sensor, and the like.
- the inertial measurement device 42 detects the roll angle, pitch angle, yaw angle, and the like of the traveling vehicle body 3 .
- the alarm unit 63 is composed of a buzzer, a speaker, a warning light, and the like provided on the traveling vehicle body 3 .
- the alarm unit 63 issues an alarm to the surroundings of the traveling vehicle body 3 by sound or light.
- the agricultural work support device 50 is composed of, for example, a portable tablet terminal device or the like.
- the agricultural work support device 50 is mounted, for example, inside the cabin 9 of the agricultural machine 1 and is detachable from the agricultural machine 1 . That is, the agricultural machine 1 is equipped with the agricultural work support device 50 .
- the agricultural work support device 50 includes a control unit 51, a display operation unit 52, a storage unit 53, and a communication unit 54.
- the control unit 51 is composed of a CPU and memory, and controls each unit of the agricultural work support device 50 .
- the control unit 51 includes a field registration unit 51a, an area setting unit 51b, a route creation unit 51c, a trajectory calculation unit 51d, a remaining amount calculation unit 51e, a supply setting unit 51f, and a notification unit 51g. Each of these units is configured by a software program, but may be configured by hardware.
- the display operation unit 52 is composed of a touch pad and displays various information on the screen. Further, various inputs can be performed by performing predetermined operations on the display screen of the display operation unit 52 .
- the display operation unit 52 is a display unit and an input unit. Instead of the display/operation unit 52, the agricultural work support device 50 may be provided with an independent display unit and an operation unit (input unit).
- the storage unit 53 is composed of a non-volatile memory or the like.
- the storage unit 53 stores readable and writable information and data for supporting the running and working of the agricultural machine 1 .
- the communication unit 54 is composed of an interface for connecting to the in-vehicle network N1.
- the control unit 51 communicates with the control device 60, the operation unit 62, the positioning device 40, the alarm unit 63, and the working device 2 via the in-vehicle network N1 by the communication unit .
- the control unit 51 causes the display operation unit 52 to display the home screen D1 shown in FIG.
- Data of the home screen D1 and data of screens D2 to D9 described later are stored in the storage unit 53.
- FIG. The control unit 51 reads data from the storage unit 53 as necessary, and causes the display operation unit 52 to display a screen based on the data.
- An agricultural machine mark X1, a field key B1, an automatic operation key B2, a history key B3, and a setting key B0 are displayed on the home screen D1.
- the setting key B0 is a key for making various settings. Predetermined items can be set by selecting (tapping) the setting key B0.
- the predetermined items include, for example, setting (registration) of the agricultural machine 1 on which the agricultural work support device 50 is mounted and the working device 2 connected to the agricultural machine 1, setting of the display form of the display operation unit 52, and the like. is
- the farm field key B1 is a key for registering the farm field in which the agricultural machine 1 performs farm work.
- the automatic driving key B2 is a key for setting and predicting the automatic driving work mode of the agricultural machine 1 .
- the automatic traveling work mode is a mode in which agricultural work (ground work) is performed by the work device 2 while the traveling vehicle body 3 of the agricultural machine 1 is automatically driven. Automatic operation of the agricultural machine 1 means automatically changing the traveling speed of the traveling vehicle body 3 and automatically steering the traveling vehicle body 3 .
- the agricultural machine 1 can of course also be driven manually, and can perform work on the ground with the work device 2 during the movement.
- the manual operation of the agricultural machine 1 means that the driver of the agricultural machine 1 operates the accelerator member and the brake member of the operation unit 62 to change the traveling speed of the traveling vehicle body 3 and operate the steering wheel 30 (FIG. 1). By doing so, the traveling vehicle body 3 is steered.
- a history key B3 in the home screen D1 of FIG. 3 is a key for displaying the work history of the agricultural machine 1 .
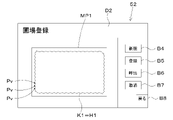
- the control unit 51 causes the display operation unit 52 to display the farm field registration screen D2 shown in FIG.
- the field registration screen D2 displays a map MP1, the position Pv of the traveling vehicle body 3 of the agricultural machine 1, a new key B4, a registration key B5, a call key B6, a cancel key B7, and a return key B8.
- An image showing a map of the surroundings of the agricultural machine 1 acquired from the positioning device 40 is displayed on the map MP1.
- the map MP1 displays fields in which the agricultural machine 1 performs farm work, and is associated with position information such as latitude and longitude.
- position information such as latitude and longitude.
- FIG. 5A is a diagram for explaining a method of registering fields.
- the user driver of the agricultural machine 1 selects the new key B4 on the farm field registration screen D2 shown in FIG. 4 to manually rotate the agricultural machine 1 in the farm field.
- the agricultural field registration unit 51a (FIG. 1) acquires the position Pv of the traveling vehicle body 3 detected by the positioning device 40 by the communication unit 54 at predetermined intervals, and records the data of the position Pv at any time.
- the control unit 51 causes the position Pv of the traveling vehicle body 3 to be displayed on the map MP1 at any time. (In FIGS. 4 and 5A, for the sake of convenience, only part of the position Pv of the traveling vehicle body 3 is shown.)
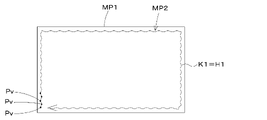
- the agricultural field registration unit 51a calculates the traveling locus K1 of the traveling vehicle body 3 based on the plurality of recorded positions Pv of the traveling vehicle body 3 . Further, the control unit 51 displays the traveling locus K1 of the traveling vehicle body 3 on the map MP1 as shown in FIG. 5A.
- the running locus of the running vehicle body 3 is a line K1 that returns to the first detected position Pv after passing through a plurality of positions Pv of the running vehicle body 3 in the order of detection (acquisition order).
- the farm field registration unit 51a sets the running locus K1 as the contour (outline) H1 of the farm field, and registers (stores) in the storage unit 53 the farm map MP2 (data indicating the contour of the farm field) represented by the contour H1.
- the field registration unit 51a registers field identification information such as field name and field management number in the storage unit 53 in association with the field map MP2.
- the field identification information may be assigned by the field registration unit 51a, input by the user by operating the display operation unit 52, or stored in the storage unit 53 in advance. .
- a plurality of farm field maps MP2 and the like can be registered in the storage unit 53 .
- the control unit 51 displays the agricultural field map MP2 (field outline H1) on the map MP1.
- the farm field registration unit 51a calculates an inflection point from the traveling locus K1 of the traveling vehicle body 3, and draws a line K2 passing through the inflection point as the contour H1 of the farm field and the field map. MP2, and the farm field map MP2 may be registered in the storage unit 53.
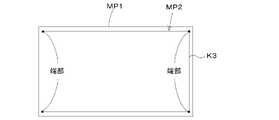
- FIG. 5B when the agricultural machine 1 goes around, the user operates a predetermined switch or the like provided on the operation unit 62 of the agricultural machine 1 to specify the edge of the field as shown in FIG. 5C. good.
- the farm field registration unit 51a sets the line K3 that returns to the first designated end after passing through each end of the farm field in the designated order as the contour H1 of the farm field and the farm field map MP2. You may register in the memory
- FIG. Further, the field outline H1 and the field map MP2 are data indicated by positions (latitude, longitude), data indicated by a coordinate system (X-axis, Y-axis), or data indicated by other expressions. There may be.
- the control unit 51 reads the data of one of the field maps MP2 registered in the storage unit 53, MP2 is displayed on the field registration screen D2. Further, when the user selects the cancel key B7, the farm field registration unit 51a erases the position Pv of the traveling vehicle 3 and the field map MP2 (field outline H1) displayed on the map MP1 at this time, and deletes these data. is also erased from the storage unit 53. That is, the registration of the field outline H1 and the field map MP2 is canceled.
- the control unit 51 causes the display operation unit 52 to display the home screen D1 of FIG. That is, the return key B8 is a key for returning the display screen of the display operation unit 52 to the previous screen (the same applies to subsequent screens D3 to D9).
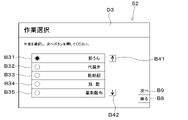
- the control unit 51 causes the display operation unit 52 to display the work selection screen D3 shown in FIG.
- a message indicating the input operation procedure is displayed on the work selection screen D3.
- the work selection screen D3 also displays a plurality of work keys B31 to B35, an up arrow key B41, a down arrow key B42, a next key B9, and a return key B8.
- the work keys B31 to B35 are keys indicating farm work that can be performed by the agricultural machine 1 and the work device 2 connected to the agricultural machine 1.
- FIG. 6 five work keys B31, B32, B33, B34, and B35 are displayed.
- the control unit 51 displays a work key indicating another work on the work selection screen D3.
- the control unit 51 displays the selected work key on the work selection screen D3 in a display form different from that of the other work keys. In the example of FIG. 6, only the selected tillage key B31 is marked with a black circle.
- the control unit 51 causes the display operation unit 52 to display the vehicle setting confirmation screen D4 shown in FIG. Let That is, the next key B9 is a key for switching the display screen of the display operation unit 52 to the next screen (the same applies to subsequent screens D4 to D9).
- the vehicle setting confirmation screen D4 displays a message indicating the input operation procedure, the type of farm work, the type of the agricultural machine 1, and the work width that can be worked with the work device 2.
- the type of the agricultural machine 1 and the working width of the working device 2 displayed on the vehicle setting confirmation screen D4 can be set by the user, for example, by selecting the setting key B0 on the home screen D1 shown in FIG. can be set by doing
- the user can register the specifications such as types and working widths of the plurality of agricultural machines and the plurality of working devices in the agricultural work support device 50 by selecting the setting key B0 and performing a predetermined input operation.
- the working width of the working device 2 is the workable length in a horizontal plane perpendicular to the traveling direction of the working device 2 .
- an unmanned aircraft setting key B10, a manned aircraft setting key B11, a next key B9, and a return key B8 are displayed.
- the user wants to change the type and working width of the agricultural machine 1 displayed on the vehicle setting confirmation screen D4
- the user selects the unmanned machine setting key B10 or the manned machine setting key B11.
- the control unit 51 causes the display operation unit 52 to display other setting screens (not shown) that can change the type of the agricultural machine 1 and the working width.
- the control unit 51 causes the display operation unit 52 to display the vehicle setting confirmation screen D4 again.
- the control unit 51 causes the display/operation unit 52 to display an agricultural field selection screen D5 shown in FIG.
- the field selection screen D5 displays one or more registered field maps MP2, an up arrow key B41, a down arrow key B42, a next key B9, and a return key B8.
- three farm field maps MP2 are displayed in FIG. 8, when there are four or more registered farm field maps MP2, the user selects the up arrow key B41 or the down arrow key B42 so that the controller 51 is registered on the field selection screen D5.
- the control unit 51 displays the selected farm field map MP2 in a display form different from the other farm field maps MP2. In FIG. 8, only the selected field map MP2 is surrounded by a thick line frame. Further, the control unit 51 displays the date and time of the last farm work performed on the selected farm field map MP2 and the area of the farm field map MP2 on the farm field selection screen D5. When the user selects the Next key B9 while one of the field maps MP2 is selected, the control unit 51 causes the display operation unit 52 to display the route creation 1 screen D6 shown in FIG.
- the route creation 1 screen D6 includes a selected farm field map MP2 (field outline H1), an agricultural machine mark X1, a message indicating an input operation procedure, an automatic headland work key B43, a work type key B44, a next key B9, and return key B8 are displayed.
- the automatic headland work key B43 is a headland set in the farm field map MP2 as will be described later. is the key for selecting
- the work type key B44 is a key for selecting the work state to be performed by the work device 2.
- the case where the tillage work is selected on the work selection screen D3 in FIG. 6 is taken as an example, so the work type key B44 in FIG. 9 indicates that the type of tillage work is adjacent or indirect. It is the key for selecting When another work is selected on the work selection screen D3 of FIG. 6, the work type key B44 of FIG. 9 serves as a key for selecting the state of the other work.
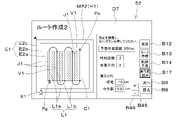
- the control unit 51 displays the route creation 2 screen D7 shown in FIG. to display.
- the route creation 2 screen D7 of FIG. 10A includes a selected field map MP2, an agricultural machine mark X1, a message indicating an input operation procedure, a plurality of setting items and their numerical input fields, a recommended key B12, a route creation key B13, A trajectory prediction key B14, a plus key B45, a minus key B46, a next key B9, and a return key B8 are displayed.
- the control unit 51 acquires the actual position of the traveling vehicle body 3 detected by the positioning device 40 by the communication unit 54, and displays the position of the traveling vehicle body 3 on the field map MP2 according to the position of the traveling vehicle body 3.
- Agricultural machine mark X1 may be displayed at the corresponding portion of .
- the multiple setting items in the route creation 2 screen D7 include the expected work distance, the number of headlands, the work direction, the headland overlap, and the center overlap. Of these items, numerical values can be entered for items other than the expected working distance.
- the number of headlands is the number of one or more headlands set inside the registered field contour H1 (field map MP2) along the contour H1.
- the working direction is the direction in which the working device 2 works while the traveling vehicle body 3 is reciprocated in a straight line in the central portion inside the headland of the field.
- a predetermined numerical value for example, "1" or "2”
- the vertical or horizontal direction on the route creation 2 screen D7 corresponding to the numerical value is set.
- the overlapping margin of the headland is a margin of protrusion of the working width of the working device 2 with respect to the headland.
- the overlapping margin in the central portion is the overlapping margin between working widths when the working device 2 performs the work while reciprocating the traveling vehicle body 3 in a straight line in the central portion of the field.
- each of the setting items described above When the user selects the numerical value input field for each of the setting items described above and operates the plus key B45 or the minus key B46, a numerical value is input to each numerical value input field.
- the control unit 51 selects each setting item corresponding to the farm work selected on the work selection screen D3 (FIG. 6) among the setting values stored in advance in the storage unit 53. , and input (display) the set value in the corresponding numerical input field.
- the user selects the route creation key B13. Then, as shown in FIG. 10B, the area setting unit 51b (FIG. 1) sets a central area (second area) C1 and a headland area (first area) E1 in the field map MP2. Further, the route creation unit 51c (FIG. 1) creates a travel route (planned travel route) L1 in the field map MP2.
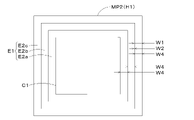
- Figures 11A to 11D are diagrams for explaining how to set the areas C1 and E1 and the travel route L1.
- the area setting unit 51b first performs the A central area C1 and a headland area E1 are set. Specifically, as shown in FIG. 11A, for example, the area setting unit 51b offsets the contour H1 of the field inward by the number of headlands by using a width W4 obtained by subtracting the headland overlap width W2 from the working width W1 of the working device 2.
- a contour C1 formed by doing is calculated, and an area (central portion) surrounded by the contour C1 is set as the central area C1.
- the area setting unit 51b calculates a contour formed by offsetting the contour H1 of the field inward by the number of headlands within the working width of the working device 2 (or the outer width of the working device 2). , an area (central portion) surrounded by the contour C1 may be set as the central area. Further, the number of headlands, the headland overlap margin, or the central portion overlap margin is set to a fixed value set in advance, and the fixed value is stored in the storage unit 53, and the area setting unit 51b can It may be read out from the storage unit 53 .
- the area setting unit 51b After setting the central area C1 inside the contour H1 of the field as described above, the area setting unit 51b sets a frame-shaped area (outer frame portion) outside the central area C1 as the headland area E1. . Then, the area setting unit 51b causes the storage unit 53 to store data such as positions indicating the areas C1 and E1.
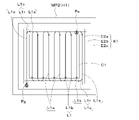
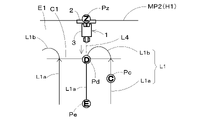
- the route creation unit 51c creates the travel route L1 based on the set areas C1 and E1, the working width of the working device 2, the input working direction, the headland overlap, and the center overlap. Specifically, first, as shown in FIG. 11B, the route creating unit 51c starts from one end (the right end in FIG. 11B) of the central area C1 parallel to the working direction (vertical direction in FIG. 11B). A plurality of unit work sections C2 are created in the central area C1 by dividing in order by the work width W1. At this time, the route creation unit 51c causes the work width W1 to overlap the headland area E1 by the headland overlap width W2 in the unit work section C2 to be created first. In addition, in the second and subsequent unit work sections C2, the route creating section 51c causes the work width W1 to overlap the previously created unit work section C2 by an overlap width W3 at the center.
- the route creation unit 51c creates a straight route L1a along which the traveling vehicle body 3 travels straight for each unit work section C2.
- the route creation unit 51c creates a linear straight route L1a connecting both ends in the longitudinal direction of the unit work section C2 on the center line in the width direction (horizontal direction in FIG. 11C) of the unit work section C2.
- the straight route L1a created in the unit work section C2 is created outside the central area C1. If so, the route creation unit 51c may exclude the straight route L1a from the travel route L1.
- the route creation unit 51c creates a route L1b connecting adjacent straight routes L1a in the headland area E1.
- This route L1b is a turning route in which the traveling vehicle body 3 turns from one of the two adjacent straight routes L1a to the other.
- FIG. 11C and the like exemplify a simple semicircular turning route L1b, but this shape can be easily displayed on the display screen D7 (and the display screen D8 described later) of the display operation unit 52, or This is for the sake of convenience, such as making it easier to visually recognize the travel route L1 on the display screen.
- the traveling vehicle body 3 actually travels on one straight route L1a and then turns to travel on the other straight route L1a, the traveling vehicle body 3 turns while traveling forward or backward.
- the route creating unit 51c may create a turning route L1b having a shape other than a semicircular shape. The same applies to other turning routes and turning sections included in other turning routes, which will be described later.
- the control device 60 (FIG. 1) of the agricultural machine 1 lowers the working device 2 by the lifting device 8 (FIG. 2) while the traveling vehicle body 3 is traveling on the straight route L1a. Ground work is carried out by Further, the control device 60 raises the working device 2 by the lifting device 8 to stop the work on the ground by the working device 2 while the traveling vehicle body 3 is traveling based on the turning route L1b.
- the straight route L1a is a work route in which ground work is performed by the work device 2 while the traveling vehicle body 3 of the agricultural machine 1 is automatically driven.
- the central area C1 in which a plurality of straight routes L1a are created is a work area in which the work on the ground is performed by the work device 2 while the traveling vehicle body 3 is reciprocated while traveling straight by automatic operation.
- the work route is not limited to a straight route such as the straight route L1a, and may be a curved route.
- at least one work route out of a linear work route and a curved work route may be created in the work area.
- the route creation unit 51c When the automatic headland work key B43 is used to select not to work on the headland on the route creation 1 screen D6 of FIG. 9, the route creation unit 51c, as shown in FIG. A configured travel route L1 is created, and data such as a position indicating the travel route L1 is stored in the storage unit 53 .
- the route creation unit 51c selects one end of the straight route L1a that is not connected to the turning route L1b (the upper end of the straight route L1a on the right end in FIG. 11C) among the ends of the straight route L1a on both sides of the central area C1. ), and the goal position Pg is set at the other end of the straight route L1a (lower end of the left straight route L1a in FIG. 11C). Then, the route creation unit 51c causes the storage unit 53 to store data indicating the respective positions Ps and Pg.
- the route creation unit 51c calculates the expected work distance for performing work on the ground with the work device 2 while causing the traveling vehicle body 3 to travel based on all the straight routes L1a, and stores the calculation result in the storage unit 53. Furthermore, the route creation unit 51c sets the vehicle speed (moving speed) at which the traveling vehicle body 3 is automatically driven to the straight route L1a and the turning route L1b, and associates each vehicle speed with the data of each route L1a and L1b. is stored in the storage unit 53. At this time, for example, the route generation unit 51c sets the vehicle speed so that the greater the curvature of each route L1a and L1b, the slower the vehicle speed.
- an input column for inputting the vehicle speed of each route L1a, L1b may be provided on the route creation 2 screen D7, and the route creation unit 51c may set the vehicle speed entered in each input column to each route L1a, L1b. good.
- the control unit 51 displays the areas C1 and E1, the travel route L1, the start position Ps, the goal position Pg, and the expected work distance on the route creation 2 screen D7 (see FIG. 11C). ).
- the areas C1 and E1, the travel route L1, the start position Ps, and the goal position Pg are displayed on the route creation 2 screen D7 as shown in FIG. 11C.
- the travel route L1 is composed of a straight route L1a and a turning route L1b.
- a loop route L1c that loops around the outside of the central area C1 is created in the headland area E1.
- the route creation unit 51c among the headlands E2a, E2b, and E2c set by the area setting unit 51b to the outside of the central area C1, turns to the headland E2a that is closest to the central area C1. Create route L1c.
- the route generation unit 51c selects one end (Fig. 11D
- the start position Ps is set at the upper end of the straight route L1a on the right end
- the loop route L1c is connected to the other end of the straight route L1a (lower end of the straight route L1a on the left end in FIG. 11D).
- the route creating unit 51c sets the goal position Pg at the end of the circuit route L1c that is not connected to the straight route L1a.
- the circuit route L1c is a work route in which ground work is performed by the work device 2 while the traveling vehicle body 3 is automatically driven.
- the circuit route L1c includes a plurality of straight portions L1s that are substantially straight, and a plurality of turning portions L1r that are curved with a radius of curvature equal to or greater than a predetermined radius.
- the straight portion L1s is formed on the center line in the width direction of the headland E2a.
- the turning portion L1r connects one straight portion L1s and the other straight portion L1s among a plurality of continuous straight portions L1s extending in different directions, and turns from the one straight portion L1s toward the other straight portion L1s. This is the route for turning the traveling vehicle body 3.
- a loosely curved portion (curved with a radius of curvature less than a predetermined radius of curvature) may be formed.
- route (not shown) is included in the round route L1c.
- the headland E2a for which the circuit route L1c is created as described above is a work area in which the work device 2 performs work on the ground while the traveling vehicle body 3 circles the outside of the central area C1.
- the route creating unit 51c may create a circuit route for other headlands E2b and E2c outside the headland E2a.
- a key for inputting the number of headlands for creating a circuit route may be provided on the route creation 2 screen D7.
- the route creation unit 51c may create a circuit route that makes multiple turns around at least one headland among the plurality of headlands E2a, E2b, and E2c, or may create a circular route that makes multiple turns around at least one of the headlands E2a, E2b, and E2c.
- a circular route may be constructed to pass through both headlands.
- the route creation unit 51c may create a circuit route in the headland area E1 that circles around the center area C1 a number of times equal to or greater than the number of headlands.
- the route creation unit 51c creates the travel route L1 composed of the straight route L1a, the turning route L1b, and the circuit route L1c
- the data such as the position indicating the travel route L1 is stored in the storage unit 53.
- the route creation unit 51c sets the start position Ps and the goal position Pg of the travel route L1, and causes the storage unit 53 to store data indicating the positions Ps and Pg.
- the route generation unit 51c calculates the expected work distance for performing ground work with the work device 2 while the traveling vehicle body 3 is traveling based on all the straight routes L1a and the circuit routes L1c, and stores the calculated results in the storage unit. 53.
- the route creation unit 51c sets vehicle speeds for automatically driving the traveling vehicle body 3 to the straight route L1a, the turning route L1b, and the circuit route L1c, and sets the respective vehicle speeds as data for the routes L1a, L1b, and L1c. , and stored in the storage unit 53.
- the control unit 51 displays the areas C1 and E1, the travel route L1, the start position Ps, the goal position Pg, and the expected work distance on the route creation 2 screen D7 as shown in FIG. 10B. to display.
- the travel route L1 displayed at this time is composed of a straight route L1a, a turning route L1b, and a circuit route L1c.
- the trajectory calculation unit 51d (FIG. 1) predicts a work portion, that is, the work device 2 that is predicted to perform ground work by the work device 2 while automatically driving the traveling vehicle body 3 based on the travel route L1.
- a work locus J1 is calculated.
- the trajectory calculation unit 51d calculates the predicted work trajectory J1 based on the travel route L1 and the work width of the work device 2. For example, the trajectory calculation unit 51d moves the traveling vehicle body 3 and the working device 2 along the working route (the straight portion L1s of the straight traveling route L1a and the circular route L1c in FIG. 10C ) in which the working device 2 performs ground work in the traveling route L1. A passing portion (passing area) of the working width of the working device 2 when the is moved (forward or backward) is obtained as a predicted work locus J1. At this time, the center of the width direction of the traveling vehicle body 3 and the center of the working width of the working device 2 are set on the working route.
- the trajectory calculation unit 51d causes the storage unit 53 to store the data of the predicted work trajectory J1.
- the control unit 51 displays the predicted work locus J1 (hatched portion) so as to be superimposed on the travel route L1 of the farm field map MP2 in the route creation 2 screen D7.
- the locus calculation unit 51d may calculate the predicted work locus J1 immediately after the route preparation unit 51c prepares the travel route L1, and the data of the predicted work locus J1 may be stored in the storage unit 53.
- the control unit 51 reads the data of the predicted work trajectory J1 from the storage unit 53, and displays the predicted work trajectory J1 on the route creation 2 screen D7 based on the data.
- the trajectory calculation unit 51d calculates the passage portion of the working width of the working device 2 when the working device 2 is moved along not only the linear working route but also the curved working route of the traveling route L1. may be obtained as the predicted work trajectory J1.
- work routes L1a and L1c are created for performing work on the ground with the work device 2 while the traveling vehicle body 3 is automatically driven in the central area C1 and the headland E2a.
- the predicted work locus J1 is displayed along the work routes L1a and L1c.
- the automatic headland work key B43 is used to select not to work in the headland, and as shown in FIG. 11C, the work route L1a is created only in the central area C1. , the predicted work locus J1 is displayed along the work route L1a.
- the user who sees the travel route L1 and the predicted work locus J1 displayed on the route creation 2 screen D7 selects the route creation key B13 after re-inputting the numerical values for any of the setting items.
- the area setting unit 51b sets the areas C1 and E1 again in the above-described procedure
- the route creation unit 51c creates the travel route L1, and the areas C1 and E1 and the travel route L1 in the route creation 2 screen D7. is updated.
- the user selects the start position Ps or the goal position Pg, moves the positions Ps and Pg to desired positions on the field map MP2, and then selects the route creation key B13.
- the area setting unit 51b again sets the areas C1 and E1 in the above-described procedure
- the route creation unit 51c creates the travel route L1 again, and the areas C1 and E1, the travel route L1, etc. in the route creation 2 screen D7. is updated.
- the user selects the trajectory prediction key B14. Then, the trajectory calculation unit 51d calculates the predicted work trajectory again according to the procedure described above, and the display of the predicted work trajectory J1 in the route creation 2 screen D7 is updated.
- the control unit 51 After the travel route L1 is displayed on the route creation 2 screen D7, when the user selects the next key B9, the control unit 51 displays the field map MP2, the areas C1 and E1, and the travel route displayed on the screen D7. Data indicating L1 is transmitted by the communication unit 54 to the control device 60 (FIG. 1) via the in-vehicle network N1. Further, the control unit 51 causes the display operation unit 52 to display a travel control screen D8 shown in FIG.
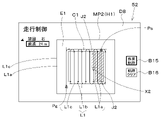
- the travel control screen D8 is a screen that displays the travel state and work state of the agricultural machine 1 in the automatic travel work mode. Note that the travel control screen D8 shown in FIG. 12 illustrates the travel state and work state of the agricultural machine 1 after a while from the start of the automatic travel work mode.
- the travel control screen D8 includes a field map MP2, a travel route L1, a start position Ps, a goal position Pg, an agricultural machine mark X2, a travel state of the agricultural machine 1, a setting change key B20, a work trajectory key B15, and a trajectory clear key B16. is displayed.
- the control unit 51 acquires the actual position of the traveling vehicle body 3 detected by the positioning device 40 by the communication unit 54 at a predetermined cycle, and displays the agricultural field map MP2 corresponding to the position of the traveling vehicle body 3 on the corresponding location on the agricultural field map MP2.
- the machine mark X2 is displayed at any time. That is, the agricultural machine mark X2 in the traveling control screen D8 indicates the actual position of the traveling vehicle body 3 of the agricultural machine 1.
- the mode switch 65 (FIG. 1) is operated to switch to the automatic travel work mode.
- the automatic control unit 61 (FIG. 1) shifts to the automatic traveling work mode, based on the traveling route L1 received (acquired) from the agricultural work support device 50 and the position of the traveling vehicle body 3 detected by the positioning device 40. Then, the ground work is performed by the working device 2 while the traveling vehicle body 3 is automatically driven.
- the automatic control unit 61 first causes the traveling vehicle body 3 to automatically travel from the start position Ps based on the straight route La1 and the turning route L1b, while the working device 2 performs ground work. At this time, when the traveling vehicle body 3 is automatically driven based on the straight route L1a, the automatic control unit 61 performs ground work with the work device 2 and automatically drives the traveling vehicle body 3 based on the turning route L1b. , the work on the ground by the work device 2 is stopped. Then, when the traveling vehicle body 3 starts traveling by automatic operation based on the next straight route L1a, the work on the ground by the work device 2 is resumed. As a result, the traveling vehicle body 3 travels straight back and forth in the central area C1 by automatic operation, and the work device 2 performs ground work in the central area C1.
- the automatic control unit 61 performs ground work with the work device 2 while automatically running the traveling vehicle body 3 based on the lap route L1c and the position of the traveling vehicle body 3 .
- the traveling vehicle body 3 automatically circulates around the outside of the central area C1, and the work device 2 performs ground work on the headlands E2a (see FIG. 11D, etc.) surrounding the central area C1.
- FIG. 13A to 13D are diagrams for explaining the automatic steering of the agricultural machine 1.
- the automatic control unit 61 automatically causes the traveling vehicle body 3 to travel, and calculates the deviation between the position of the traveling vehicle body 3 detected by the positioning device 40 and the traveling route L1. If the deviation is less than the threshold (for example, FIG. 13A), the automatic control section 61 maintains the rotation angle of the steering shaft 31 (FIG. 1). When the deviation between the position of the traveling vehicle body 3 and the traveling route L1 is greater than or equal to the threshold value and the traveling vehicle body 3 is located on the left side of the traveling route L1 (for example, FIG. 13B), the automatic control unit 61 The steering shaft 31 is rotated so that the steering direction of the vehicle body 3 is rightward.
- the automatic control unit 61 When the deviation between the position of the traveling vehicle body 3 and the traveling route L1 is greater than or equal to the threshold value and the traveling vehicle body 3 is located on the right side of the traveling route L1 (for example, FIG. 13C), the automatic control unit 61 The steering shaft 31 is rotated so that the steering direction of the vehicle body 3 is leftward.
- the steering angle of the steering device 29 is changed based on the deviation between the position of the traveling vehicle body 3 and the traveling route L1.
- the steering angle of the steering device 29 may be changed based on the angle ⁇ g of the traveling direction F1.
- the automatic control unit 61 calculates the first steering angle based on the deviation between the position of the traveling vehicle body 3 and the traveling route L1, and calculates the first steering angle based on the traveling route L1 and the traveling direction F1 of the traveling vehicle body 3. may be used to calculate the second steering angle. Then, the automatic control section 61 may calculate a third steering angle based on the first steering angle and the second steering angle, and rotate the steering shaft 31 based on the third steering angle.
- the automatic control unit 61 calculates the actual vehicle speed of the traveling vehicle body 3 based on the change in the position of the traveling vehicle body 3 when the traveling vehicle body 3 is automatically traveling based on the traveling route L1. Then, the driving of the transmission 5, the braking device 6, and the prime mover 4 is controlled so that the actual vehicle speed matches the vehicle speed associated with the straight route L1a, the turning route L1b, or the circuit route L1c.
- the automatic control unit 61 of the agricultural machine 1 automatically changes the traveling speed of the traveling vehicle body 3 based on the traveling route L1 and the position of the traveling vehicle body 3, 3 steering is performed automatically. Further, the automatic control unit 61 automatically performs or stops agricultural work (ground work) by the work device 2 .
- the user selects the work locus key B15 on the travel control screen D8 shown in FIG. Based on the position of the traveling vehicle body 3 detected by the positioning device 40 and the working width of the working device 2, the trajectory calculation unit 51d calculates the actual work trajectory J2 along which the working device 2 performed the ground work. Further, the trajectory calculation unit 51d causes the storage unit 53 to store the data of the actual work trajectory J2. Then, as shown in FIG. 12, the control unit 51 causes the actual work locus J2 (the hatched portion) to be displayed so as to be superimposed on the straight route L1a of the field map MP2. When the user selects the locus clear key B16, the control unit 51 clears the display of the actual work locus J2.
- the locus calculation unit 51d calculates the actual work locus J2 from the start of the automatic traveling work mode to the present, and The data of the trajectory J2 are stored in the storage unit 53 . Then, the control unit 51 displays the actual work locus J2 on the field map MP2. Note that when the work locus key B15 is continuously selected, the actual work locus J2 is calculated, displayed, and data is stored at a predetermined cycle. As a result, the display position of the agricultural machine mark X2 indicating the position of the traveling vehicle body 3 is updated as needed on the travel control screen D8, and the actual work locus J2 extends.
- the trajectory calculation unit 51d may calculate the actual work trajectory J2 at a predetermined cycle and store the data of the work trajectory J2 in the storage unit 53. Then, when the user selects the work locus key B15, the control unit 51 reads the data of the actual work locus J2 from the storage unit 53, and displays the actual work locus J2 on the travel control screen D8 based on the data. You may let
- Ground work may be performed on a portion of the central area C1 in the automatic traveling work mode, and then ground work may be performed on the remaining portion of the central area C1 with the same or a different agricultural machine.
- An example assuming this case is shown in FIGS. 14A and 14B.
- FIG. 14A and 14B are diagrams showing another example of the route creation 2 screen D7.
- the user inputs a negative numerical value in the input field for overlapping allowance in the center of the route creation 2 screen D7, inputs appropriate numerical values in the other input fields, and presses the route creation key B13. select. Then, the areas C1 and E1 set by the area setting section 51b and the travel route L1 and the like created by the route creating section 51c are displayed on the field map MP2.
- FIGS. 14A and 14B show the traveling route L1 composed of the straight route L1a and the turning route L1b, but the traveling route L1 includes the circular route L1c as shown in FIG. may (The same applies to embodiments shown in FIGS. 15 to 17, which will be described later.)
- the number of straight routes L1a is smaller than the number of straight routes L1a shown in FIG. 10B. Further, the intervals between the plurality of straight routes L1a shown in FIG. 14A are wider than the intervals between the plurality of straight routes L1a shown in FIG. 10B. Therefore, when the user selects the trajectory prediction key B14, as shown in FIG. 14B, the predicted work trajectory J1 (the hatched portion) calculated by the trajectory computing section 51d is displayed in the central area C1 with an interval therebetween. be.
- the portion V1 between the predicted work trajectories J1 that reciprocate in the central area C1 is such that ground work is not performed in the automatic traveling work mode of the agricultural machine 1.
- a part of the contour of one predicted work trajectory J1, a part of the contour of the other predicted work trajectory J1, and a part of the contour of the other predicted work trajectory J1 A portion surrounded by a part of the contour is set as a predicted unworked portion V1.
- a portion of the central area C1 surrounded by a part of the outline of the predicted work locus J1 and a part of the outline of the central area C1 may also be a predicted unworked area. Included in part V1.
- all or part of the headland area E1 in which no ground work is performed by the work device 2 may be included in the predicted unworked portion V1.
- the predicted unworked portion V1 is a portion different from the predicted work trajectory J1 in the field map MP2, and includes the predicted work trajectory J1, the central area C1, the headland area E1, and the headlands E2a, E2b, It is the part of Ec that is surrounded by two or more parts of each contour including at least the predicted unworked part V1. Not only the predicted work trajectory J1 but also the predicted unworked portion V1 may be calculated by the trajectory calculator 51d.
- the control unit 51 calculates a predicted unworked portion V1 (hatched portion) from the predicted work trajectory J1 calculated by the trajectory calculation unit 51d. highlight.
- the trajectory prediction key B14 the predicted work trajectory J1 is highlighted from the predicted unworked portion V1 as shown in FIG. 14B. That is, by selecting either the trajectory prediction key B14 or the unworked portion key B17, the display mode of the predicted work trajectory J1 and the predicted unworked portion V1 is switched.
- the portion of the predicted work locus J1 displayed on the route creation 2 screen D7 is projected by the agricultural machine 1 on the ground. It becomes possible to grasp that work is being done. After the automatic traveling work mode of the agricultural machine 1 is executed, the user can also grasp that it is necessary to perform ground work on the predicted unworked portion V1 with the same or a different agricultural machine.
- an unworked portion key B17 may also be provided on the travel control screen D8.
- the trajectory calculation unit 51d calculates the actual work trajectory J2 in which the work device 2 performs the ground work in the automatic traveling work mode of the agricultural machine 1. do. Specifically, for example, the trajectory calculation unit 51d determines the work route (one or more straight routes L1a in FIGS. 16A to 16D) included in the traveling route L1 from the start position Ps to the current position of the traveling vehicle body 3.
- the passage portion (passage area) of the work width when the work device 2 performs the work on the ground is obtained as the actual work locus J2. Also at this time, the center of the width direction of the traveling vehicle body 3 and the center of the working width of the working device 2 are set on the working route.
- the trajectory calculation unit 51d may also calculate an actual unworked portion V2 in which the work device 2 did not work in the automatic traveling work mode of the agricultural machine 1.
- the actual unworked portion V2 is a portion different from the actual work trajectory J2 in the field map MP2, and includes the actual work trajectory J2, the central area C1, the headland area E1, and the headlands E2a and E2b. , Ec, the portion surrounded by two or more contours containing at least the actual work locus J2.
- the control unit 51 After calculating the actual work locus J2, etc., when the work locus key B15 is selected, the control unit 51 places the actual work locus J2 on the field map MP2 as shown in FIG. Highlight from V2. Further, when the unworked portion key B17 is selected, the control unit 51 highlights the actual unworked portion V2 from the actual work locus J2 as shown in FIG. 16B. That is, the actual work locus J2 and the actual unworked portion V2 are simultaneously displayed on the traveling control screen D8 in different display modes.
- the control unit 51 Highlight the unworked portion V2. In this state, the user performs ground work with the same or different agricultural machine based on the actual unworked portion V2. In this case, the control unit 51 causes the traveling control screen D8 to continue to be displayed as shown in FIG. to erase the displayed part.
- the control unit 51 causes the agricultural machine 1 to perform actual travel. to highlight the work locus J2.
- the user performs ground work with the same or different agricultural machine based on the actual unworked portion V2.
- the control unit 51 continues the display of the travel control screen D8, and first displays the actual work locus J2-2 performed on the ground by the agricultural machine (agricultural machine mark X2). 1 and the actual unworked portion V2.
- a plurality of pieces of data of the predicted work trajectory J1 calculated by the trajectory calculation unit 51d and the actual work trajectory J2 may be stored in the storage unit 53 and saved.
- the control unit 51 reads two or more data out of the plurality of data stored in the storage unit 53, and the predicted work trajectory J1 based on each data and the actual work trajectory J2 are displayed in FIG. As shown, different display forms may be simultaneously displayed on the display operation unit 52 .
- a prediction call key B18 and a legend Y2 are displayed.
- the control unit 51 causes the display/operation unit 52 to display a list of identification information of the plurality of predicted work trajectories J1 stored in the storage unit 53 (not shown).
- the control unit 51 reads data of the predicted work trajectory J1 corresponding to the identification information from the storage unit 53, and calculates the predicted work trajectory J1 based on the data. It is displayed on the field map MP2.
- a predicted work locus J1-1 (predicted work locus 1) based on one travel route L1-1
- a predicted work locus J1-2 predicted work locus 2 based on the other travel route L1-2. is displayed.
- the control unit 51 determines the actual work trajectory J2-1 of the ground work performed by the agricultural machine 1 and the actual work trajectory of the ground work performed by the same or different agricultural machine (agricultural machine mark X2).
- J2-2 is also displayed on the field map MP2.
- the actual work trajectory J2-1 actual work trajectory 1 in which the ground work was performed first
- the actual work trajectory J2-2 actual work trajectory 2 in which the ground work was performed later. is displayed.
- the control unit 51 also displays a legend Y2 indicating display forms of the predicted work trajectories J1-1 and J1-2 and the actual work trajectories J2-1 and J2-2 on the traveling control screen D8. Thereby, the user can visually recognize a plurality of predicted work trajectories J1 and a plurality of actual work trajectories J2 when working with the agricultural machine 1 in the field corresponding to the field map MP2.
- Ground work performed by the agricultural machine 1 using the work device 2 includes work performed using materials. Specifically, for example, there are fertilization work, agricultural chemical spraying work, sowing work, and seedling transplanting work performed using materials such as fertilizers, agricultural chemicals, seeds, and seedlings.
- the working device 2 is composed of a spraying device, a seeding device, a transplanting device, or the like, and is connected to the traveling vehicle body 3 of the agricultural machine 1 .
- the control unit provided in the work device 2 controls the operation of the supply mechanism provided in the work device 2 to adjust the supply amount and supply timing of the material to be supplied to the field. Further, the control unit of the working device 2 transmits a signal indicating the start and end of the supply of materials to the field to the control device 60 (FIG. 1) of the agricultural machine 1 via the vehicle-mounted network N1 by the communication unit.
- the materials mounted on the working device 2 are consumed. Moreover, if the field is large, the materials will run out during the ground work on the field. Therefore, as will be described later, when the agricultural machine 1 performs ground work on a field in the automatic traveling work mode, the remaining amount of material is calculated and a replenishment position for material replenishment is set. Further, in the agricultural machine 1, the automatic traveling work mode is temporarily stopped, and the material replenishment mode is executed in which the traveling vehicle body 3 is automatically moved to the replenishment position.
- the control unit 51 performs the following operations as shown in FIG.
- the display/operation unit 52 is caused to display the material information input screen D9 as described above.
- On the material information input screen D9 there are a message indicating an input operation procedure for information on materials supplied (thrown in) to the work device 2, a plurality of setting items and their numerical input fields, a remaining amount reset key B19, a plus key B45, and a minus key.
- a key B46, a next key B9, and a return key B8 are displayed.
- the multiple setting items include the theoretical remaining amount, material input amount, material unit consumption amount, and remaining amount for entering material replenishment mode. Of these items, numerical values (parameters) can be input for items other than the theoretical remaining amount.
- the theoretical remaining amount is the remaining amount (unit: kg) of the material calculated by the remaining amount calculating section 51e (FIG. 1). Data indicating the remaining amount of this material is stored in the storage unit 53 and can be updated. When the user selects the remaining amount reset key B19, the numerical value displayed in the numerical value display field of the theoretical remaining amount is reset (erased), and the theoretical remaining amount data stored in the storage unit 53 is reset to the initial value (for example, "0 kg"). ”).
- the material input amount is the input amount (unit: kg) of the material input to the material holding portion such as the hopper provided in the working device 2 (or the agricultural machine 1).
- the remaining amount for entering the material replenishment mode is the remaining material amount (unit: %) at which the agricultural machine 1 shifts to the material replenishment mode during ground work in the automatic traveling work mode. A value of 0% or more can be input as the remaining amount for entering the material replenishment mode, but it is preferable to input a value greater than 0%.
- a numerical value is input to each numerical value input field.
- a recommended value for the unit material consumption amount may be set in advance for each work device 2, the recommended value may be stored in the storage unit 53, and a recommended key may be provided on the material information input screen D9. .
- the control unit 51 may read the recommended value corresponding to the working device 2 from the storage unit 53 and display it in the corresponding numerical input field of the material information input screen D9. .
- control unit 51 When the user selects the Next key B9 after entering the numerical values for each setting item on the material information input screen D9, the control unit 51 causes the storage unit 53 to store the numerical values inputted for each setting item. Further, the control unit 51 causes the display operation unit 52 to display the vehicle setting confirmation screen D4 shown in FIG.
- the remaining amount calculation unit 51e calculates the remaining amount of materials
- the supply setting unit 51f sets the supply position of materials
- the notification unit 51g sets the notification position.
- FIG. 19 is a diagram showing an example of material replenishment positions and notification positions.
- illustration of the circuit route L1c is omitted for the sake of convenience.
- the route creation key B13 is selected by the user before the automatic traveling work mode is executed in the agricultural machine 1 (before the traveling vehicle body 3 automatically travels and before the work device 2 performs work on the ground).
- the remaining amount calculation unit 51e obtains the theoretical remaining amount by adding the material input amount to the theoretical remaining amount stored in the storage unit 53 and subtracting the material consumption amount from the added value. Before the execution of the automatic traveling work mode, it is assumed that the material has not been consumed, and the consumption amount of the material is "0 kg". theoretical remaining amount. When the remaining amount calculating section 51e obtains a new theoretical remaining amount in this way, it overwrites the theoretical remaining amount stored in the storage section 53 with the new theoretical remaining amount. This updates the theoretical remaining amount.
- the automatic control unit 61 of the agricultural machine 1 executes the automatic traveling work mode, and based on the traveling route L1 and the position of the traveling vehicle body 3, the traveling vehicle body 3 automatically travels from the start position Ps while the working device is operated. It is assumed that ground work is performed according to 2.
- the remaining amount calculation unit 51e performs ground work with the work device 2 while automatically running the traveling vehicle body 3 of the agricultural machine 1 based on the above-described expected work distance (all work routes L1a and L1c). The expected distance) is multiplied by the working width of the working device 2 to obtain the total working area.
- the remaining amount calculation unit 51e multiplies the total work area by the material unit consumption to obtain the total material consumption. Since the working width and material unit consumption of the working device 2 are constant, the working distance, working area and material consumption of the working device 2 are proportional, and as the working distance of the working device 2 increases, the working area and Material consumption increases at a constant rate.
- the remaining amount calculation unit 51e determines the amount of consumption of materials at a plurality of predetermined positions (working distance from the start position Ps) on the work routes L1a and L1c (starting ground work by the work device 2 from the start position Ps) material consumption after At this time, for example, the remaining amount calculation unit 51e determines the end point of each of the work routes L1a and L1c as a predetermined position, and obtains the material consumption amount at each of the predetermined positions.
- the remaining amount calculation unit 51e subtracts the consumption amount of the material at each predetermined position from the theoretical remaining amount (the remaining amount of material at the start position Ps) stored in the storage unit 53, and calculates the theoretical remaining amount of the material at each predetermined position.
- the remaining amount calculation unit 51e converts the theoretical remaining amount of each predetermined position into a percentage, and uses the converted value as the remaining material amount (unit: %) of each predetermined position.
- the calculation method of the theoretical remaining amount and the material remaining amount described above is an example, and is not limited to this.
- the remaining amount calculation unit 51e obtains the material consumption amount by multiplying the amount of material supplied to the field per unit time by the amount of time the agricultural machine 1 has traveled straight along the straight route L1a. By subtracting the material consumption amount from the material input amount, the theoretical remaining amount and the material remaining amount at predetermined positions on the work routes L1a and L1c may be obtained. Alternatively, the theoretical remaining amount and the remaining material amount may be obtained by other methods.
- the replenishment setting unit 51f predicts (calculates) a lowering position Pe (FIG. 19) at which the remaining amount of material falls below a predetermined threshold value. At this time, the replenishment setting unit 51f sets the remaining amount for entering the material replenishment mode stored in the storage unit 53 as a predetermined threshold value, and then predicts the lowering position Pe.
- the display operation unit 52 that can input the remaining amount for entering the material replenishment mode is a threshold changing unit that can change the threshold for predicting the lowering position Pe.
- the replenishment setting unit 51f sets the material replenishment position Pz at the edge of a ridge on a line L4 extending from the straight route (work route) L1a including the lowered position Pe in the direction opposite to the traveling direction. set. That is, the replenishment position Pz is set at the edge of the field away from the travel route L1. Further, the supply setting unit 51f causes the storage unit 53 to store each data indicating the lowered position Pe and the supply position Pz, and transmits the respective data to the control device 60 by the communication unit 54 via the in-vehicle network N1. .
- the method of setting the replenishment position described above is an example, and is not limited to this.
- the supply setting unit 51f may set the ridge on the straight route L1a including the lowered position Pe to the traveling direction side.
- the replenishment position of materials may be set.
- the replenishment setting unit 51f determines that the straight route L1a (adjacent to the start position Ps side) one ahead of the straight route L1a including the lowered position Pe (adjacent to the start position Ps side).
- the material replenishment position may be set at the edge of a ridge on a line extending the straight route L1a (on the left side in FIG. 19) in the direction opposite to the traveling direction.
- the replenishment position may be set by other methods.
- the notification unit 51g sets a plurality of notification positions Pa, Pb, and Pc on the travel route L1 based on the lowered position Pe and the replenishment position Pz. More specifically, for example, the notification unit 51g sends the straight route L1a (the side of the start position Ps (side of the start position Ps (see FIG. 19 The starting point Pa of the third straight route L1a) toward the right side) is set as the first notification position.
- the straight route L1a on which the first notification position Pa is set is located on the side of the start position Ps from the lowered position Pe and the replenishment position Pz, and is a route toward the ridge on which the replenishment position Pz is set.
- the notification unit 51g indicates the start of the straight route L1a (the straight route L1a adjacent to the start position Ps side (the right side in FIG. 19)) that is immediately ahead of the straight route L1a that is closest to the replenishment position Pz.
- Point Pb is set as the second notification position.
- the notification unit 51g is a point on the straight route L1a that is one ahead of the straight route L1a closest to the replenishment position Pz and that is closer to the start point than the end point of the straight route L1a. is set as the third notification position.
- the start point and end point of the straight route L1a are also connection points with the turning route L1b.
- the notification unit 51g causes the storage unit 53 to store data indicating the notification positions Pa, Pb, and Pc.
- the method of setting the notification position described above is an example, and is not limited to this.
- the notification unit 51g detects a point between the start point and the end point of the straight route L1a ahead of the straight route L1a including the lowered position Pe, or the straight route L1a including the lowered position Pe.
- the notification position may be set at a point on the turning route L1b in front.
- the notification position may be set by other methods.
- the notification positions are not limited to three, and may be one, two, or four or more. That is, the notification unit 51g sets the notification position on another straight route L1a or on the turn route L1b on which the traveling vehicle body 3 travels in the automatic traveling work mode before the straight route L1a including the lowered position Pe. do it.
- the automatic control unit 61 automatically causes the traveling vehicle body 3 to travel based on the traveling route L1 and the position of the traveling vehicle body 3 detected by the positioning device 40. On the other hand, the ground work is performed by the work device 2. Then, when the position of the traveling vehicle body 3 reaches the connection point Pd between the turning route L1b and the straight route L1a including the lowered position Pe via the turning route L1b immediately before the replenishment position Pz, the automatic control unit 61 temporarily stops the automatic traveling work mode and then shifts to the material replenishment mode.
- the connection point Pd is a predetermined position at which one of the automatic traveling work mode and the material replenishment mode is switched to the other mode.
- the automatic control unit 61 In the material replenishment mode, the automatic control unit 61 automatically moves the traveling vehicle body 3 from a predetermined position Pd immediately before the replenishment position Pz (FIG. 20A), based on the replenishment position Pz and the position of the traveling vehicle body 3, to an extension line. It is moved (backward) along L4 to the supply position Pz (FIG. 20B). At this time, the automatic control unit 61 also raises the working device 2 by the lifting device 8 to stop the work on the ground by the working device 2 .
- the notification unit 51g of the agricultural work support device 50 sends notifications U1 suggesting material supply when the traveling vehicle body 3 passes through the notification positions Pa, Pb, and Pc in the automatic traveling work mode before shifting to the material supply mode. Do U2 and U3. Specifically, when the position of the traveling vehicle body 3 detected by the positioning device 40 passes through the first notification position Pa (FIG. 19), the notification unit 51g causes the display operation unit 52 to display A first notification U1 including the message "The remaining amount of materials is running low" is displayed for a certain period of time in the central portion of the displayed traveling control screen D8. That is, the notification unit 51g and the display operation unit 52 notify that the remaining amount (theoretical remaining amount) of the material has decreased.
- This first notification U1 is highlighted in front of other displays such as the travel route L1 and the work locus J2 in the travel control screen D8. Note that data indicating the contents of the first notification U1 made by the notification unit 51g and other notifications described later are stored in the storage unit 53 in advance.
- the notification unit 51g displays, as shown in FIG. Material will be replenished after turning.”, “After turning, back up and stop near the ridge.”, and “After stopping, the work equipment will automatically lower.”
- the included second notification U2 is displayed for a certain period of time. That is, the notification unit 51g and the display operation unit 52 notify the material replenishment timing, the replenishment position, and the behavior of the traveling vehicle body 3 and the work device 2 for the replenishment.
- This second notification U2 is also highlighted in front of other displays in the travel control screen D8.
- the notification unit 51g displays, as shown in FIG. After that, back up and stop near the ridge.” and the message “After stopping, the work equipment will be lowered automatically.” are displayed for a certain period of time. That is, the notification unit 51g and the display/operation unit 52 notify the material replenishment timing, the replenishment position, and the behavior of the traveling vehicle body 3 and the work device 2 for the replenishment.
- This third notification U3 is also highlighted in front of other displays in the travel control screen D8.
- the notification unit 51g detects the position of the traveling vehicle body 3 and the replenishment position Pz detected by the positioning device 40 before the traveling vehicle body 3 moves to the replenishment position Pz in the automatic traveling work mode.
- the notification U1 indicating the decrease and the notifications U2 and U3 indicating that the traveling vehicle body 3 is going to the replenishment position Pz are performed multiple times at intervals.
- the notification unit 51g among the plurality of notification positions Pa, Pb, and Pc, the closer the position to the replenishment position Pz (the closest is the third position Pc, and the farthest is the first position Pa), the replenishment position Pz And the notification U2 suggesting that the replenishment timing is approaching is performed.
- the notification unit 51g performs a first notification U1 indicating a decrease in the remaining amount of materials at the first notification position Pa, indicates the supply position Pz at the second notification position Pb and the third notification position Pc, and is in the material supply mode.
- a second notification U2 and a third notification U3 indicating the behavior of the traveling vehicle body 3 or the working device 2 are provided. Note that, at the first notification position Pa, the notification unit 51g notifies the material replenishment timing, the replenishment position, or the behavior of the traveling vehicle body 3 and the work device 2 for replenishment instead of the first notification U1 described above. you can go
- the notification unit 51g causes the alarm unit 63 (FIG. 1) to cause the traveling vehicle body 3 to be A notice suggesting replenishment of materials may be sent to the surroundings.
- the warning unit 63 includes a voice message or a signal sound containing information indicating a decrease in the remaining amount of materials, a replenishment position, or the behavior of the traveling vehicle body 3 or the work device 2 in the material replenishment mode.
- the information is output by a speaker or buzzer included in the warning unit 63, or the warning light included in the warning unit 63 is lit, extinguished, or blinked to transmit the information to the surroundings.
- Other notifications displayed on the display operation unit 52 may be similarly executed by the alarm unit 63 .
- the input screen D9 is displayed by the display operation unit 52.
- the user After replenishing the work device 2 and the like at the replenishment position Pz, the user inputs the material input amount, the material unit consumption amount, and the remaining amount for entering the material replenishment mode on the material information input screen D9, and then enters the next key B9. to select. Then, the control unit 51 causes the display operation unit 52 to display the traveling control screen D8 again.
- the remaining amount calculation unit 51e calculates the remaining amount of materials (theoretical remaining amount and remaining material amount), the replenishment setting unit 51f sets the lowering position Pe and replenishment position Pz, etc., and the notification unit 51g sets the notification positions Pa, Pb, Pc.
- the user performs a predetermined operation for restarting the automatic traveling work mode with the mode switch 65 (Fig. 1).
- the automatic control unit 61 automatically moves the traveling vehicle body 3 to the starting point Pd of the next straight route L1a based on the traveling route L1 and the position of the traveling vehicle body 3 shown in FIGS. 19 and 20A. , to resume the automatic driving work mode. That is, the automatic control unit 61 performs ground work by the working device 2 while automatically driving the traveling vehicle body 3 based on the traveling route L1 from the start point Pd of the next straight route L1a and the position of the traveling vehicle body 3. (resuming work).
- the work device 2 is provided with an input unit for inputting the parameters, and the control unit 51 of the agricultural work support device 50 transmits the parameters input by the input unit from the work device 2 via the vehicle-mounted network N1 by the communication unit 54. may be obtained.
- the remaining amount for entering material replenishment mode is set to a preset fixed value, and the fixed value is stored in the storage unit 53. 51f may read from the storage unit 53 as necessary.
- the material input amount, the material unit consumption amount, and the remaining amount for entering the material replenishment mode are input by the display operation unit 52 before the automatic traveling work mode is executed or when the material replenishment mode is temporarily stopped (at the time of material replenishment). Then, the remaining amount calculation unit 51e calculates the remaining amount of materials (theoretical remaining amount and remaining material amount), the replenishment setting unit 51f sets the replenishment position Pz, and the notification unit 51g sets the notification positions Pa, Pb, and Pc. An example of setting is shown.
- the remaining amount calculation unit 51e calculates the remaining amount of material based on the material input amount, material unit consumption amount, and the state of the traveling vehicle body 3 and the work device 2. It may be calculated in cycles. In addition, every time the remaining amount calculation unit 51e calculates the remaining amount of materials in this way, the supply setting unit 51f resets the supply position Pz and the like, and the notification unit 51g resets the notification positions Pa, Pb, and Pc. may
- fertilizers, chemicals, seedlings, seeds, and the like to be supplied to fields are exemplified as materials used during ground work by the work device 2 and supplied at the supply position Pz.
- materials such as fuel and electric power for driving the prime mover 4 of the agricultural machine 1 may be replenished at the replenishment position Pz. That is, the materials to be replenished to the agricultural machine 1 may be vehicle-mounted materials that are necessary and reduced when the working device 2 performs ground work while the traveling vehicle body 3 is traveling.
- the agricultural work support device 50 of the present embodiment includes a route creation unit 51c that creates a travel route L1 for the agricultural machine 1 to travel in a registered farm field (field map) MP2, and a route generator 51c that the agricultural machine 1 travels based on the travel route L1.
- a route creation unit 51c that creates a travel route L1 for the agricultural machine 1 to travel in a registered farm field (field map) MP2, and a route generator 51c that the agricultural machine 1 travels based on the travel route L1.
- the work portion (predicted work trajectory) J1 where farm work is predicted to be performed by the work device 2 connected to the agricultural machine 1 or the unworked portion V1 where farm work is predicted not to be performed by the work device 2 is displayed.
- a display unit (display operation unit) 52 According to this configuration, the predicted work portion J1 or the unworked portion V1 is displayed on the display unit 52 and becomes visible before the farm work is performed by the agricultural machine 1 in the field. It can improve performance and work efficiency.
- the display unit 52 displays a work part J1 predicted to perform farm work by the work device 2 while the agricultural machine 1 automatically travels based on the travel route L1, or indicates that the work device 2 is expected to perform farm work.
- An unworked portion V1 that is expected not to be performed is displayed.
- the display unit 52 displays the predicted work portion J1 and the predicted unworked portion V1 in different display forms.
- the predicted work portion J1 and the unworked portion V1 can be visually recognized and easily distinguished before farm work is performed by the agricultural machine 1 in the field. Efficiency can be further improved.
- the display unit 52 displays the actual work portion (actual work locus) J2 where the farm work was performed by the work device 2 while the agricultural machine 1 traveled based on the travel route L1, or the farm work by the work device 2. Display the actual unworked portion V2 for which no work has been performed.
- the actual work portion J2 or the actual unworked portion V2 can be displayed by the display unit 52 during or after the farm work is being performed by the agricultural machine 1 in the field, which is convenient. It is possible to further improve the productivity and efficiency of agricultural work.
- the display unit 52 displays the actual work portion J2 where the farm work was performed by the work device 2 while the agricultural machine 1 traveled in automatic operation based on the travel route L1, or the work device 2 performed the farm work. Display the actual unworked portion V2 that does not exist.
- the display unit 52 displays the actual work portion J2 where the farm work was performed by the work device 2 while the agricultural machine 1 traveled in automatic operation based on the travel route L1, or the work device 2 performed the farm work.
- Display the actual unworked portion V2 that does not exist.
- the display unit 52 displays the actual work portion J2 and the actual unworked portion V2 in different display modes.
- the actual working portion J2 and the actual unworked portion V2 can be visually recognized and easily distinguished during or after the agricultural work is performed by the agricultural machine 1 in the field. Therefore, it is possible to further improve the convenience and work efficiency of agricultural work.
- the agricultural work support device 50 calculates the predicted work trajectory of the work device 2 that becomes the predicted work portion J1 based on the work width that can be worked by the work device 2 and the travel route L1.
- the display unit 52 which includes a locus calculation unit 51d, displays the predicted work locus J1 together with the farm field MP2 and the travel route L1.
- the predicted work trajectory J1 for farm work by the work device 2 becomes visible together with the field MP2 and the travel route L1, and the convenience and work efficiency when farm work is performed by the agricultural machine 1 can be further improved.
- the agricultural work support device 50 indicates the number of headlands E2a, E2b, and E2c set along the contour H1 of the farm field MP2 inside the overlapping margin of the working width of the working device 2 or the farm field MP2.
- an input unit (display operation unit) 52 for inputting the number of headlands; and a first area (headland area) E1 including headlands E2a, E2b, and E2c based on the working width, overlap margin, or number of headlands.
- an area setting unit 51b for setting a second area (central area) C1 located inside the first area E1.
- the trajectory calculation unit 51d calculates the predicted work trajectory J1 based on at least the travel route (straight route) L1a created in the second area C1.
- the predicted work locus J1 calculated based on the travel route (straight route) L1a created in the second area C1 can be visually recognized. It is possible to further improve the convenience and work efficiency of agricultural work. Further, when the predicted work locus J1 calculated based on the travel route (circumferential route) L1c created in the first area E1 is displayed on the display unit 52 and becomes visible, the agricultural machine 1 moves to the first area E1. It is possible to further improve the convenience and work efficiency when performing agricultural work.
- the travel route L1, the predicted work trajectory J1, and the display by the display unit 52 are updated according to the change in the input content by the input unit 52.
- the working width, overlap, or number of headlands of the working device 2 can be input again through the input unit 52, and changes in the travel route L1 and the predicted work trajectory J1 can be visually recognized. It is possible to further improve the convenience and work efficiency when performing.
- the trajectory calculation unit 51d calculates the actual distance based on the position and work width of the agricultural machine 1 when the agricultural machine 1 performs agricultural work with the work device 2 while traveling based on the travel route L1.
- the work locus J2 is calculated, and the display unit 52 displays the position of the agricultural machine 1 and the actual work locus J2 together with the field MP2 and the travel route L1.
- the actual work trajectory J2 is displayed on the display unit 52 and becomes visible while the agricultural machine 1 is performing farm work in the field or after the farm work is performed, thereby improving convenience and working efficiency of the farm work. can be made
- the storage unit 53 is provided for storing a plurality of predicted work trajectories J1 and actual work trajectories J2. Two or more of them are displayed in different forms. As a result, a plurality of predicted work trajectories J1 and a plurality of actual work trajectories J2 can be displayed on the display unit 52 and can be easily visually recognized when agricultural work is performed by the agricultural machine 1 in a field. Work efficiency can be further improved.
- the agricultural work support system 100 of the present embodiment includes an agricultural work support device 50 and an agricultural machine 1 that can travel and can be connected to a work device 2 for performing farm work.
- the predicted work portion J1 or the unworked portion V1 is displayed on the display section 52 of the farm work support device 50 and becomes visible before the farm work is performed by the agricultural machine 1 in the field.
- the actual work trajectory J2 or the actual unworked portion V2 is displayed by the display unit 52 and becomes visible when the agricultural machine 1 is performing farm work in the field or after the farm work is performed. Therefore, it is possible to improve the convenience and work efficiency when performing farm work with the agricultural machine 1 in the field.
- the agricultural work support system 100 includes a position detection unit (positioning device) 40 that detects the position of the agricultural machine 1, and a work connected to the agricultural machine 1 while automatically running the agricultural machine 1. and an automatic control unit 61 for executing an automatic traveling work mode for performing agricultural work by the device 2.
- the agricultural work support device 50, the position detection unit 40, and the automatic control unit 61 are provided in the agricultural machine 1, and the automatic control unit 61 ,
- the automatic traveling work mode is executed based on the traveling route L1 created by the route creation unit 51c provided in the agricultural work support device 50 and the position of the agricultural machine 1 detected by the position detection unit 40. do.
- the work portion J1 where the agricultural work is expected to be performed by the work device 2 while the agricultural machine 1 is automatically driven.
- the unworked portion V1 is displayed on the display unit 52 of the agricultural work support device 50 and becomes visible.
- the farm field (farm field map) MP2 the travel route L1, the position of the agricultural machine 1, and the automatic operation of the agricultural machine 1 are displayed.
- the actual work trajectory J2 or the actual unworked portion V2 is displayed by the display unit 52 and can be visually recognized. Therefore, it is possible to further improve convenience and work efficiency when performing farm work with the agricultural machine 1 in the field.
- the agricultural machine 1 of the present embodiment includes an agricultural work support device 50, a traveling vehicle body 3, connecting portions 8g and 8h capable of connecting a working device 2 for performing agricultural work to the traveling vehicle body 3, and a traveling vehicle body. and a position detection unit 40 for detecting the position of .
- the predicted work portion J1 and the unworked portion V1 are displayed on the display unit 52 of the farm work support device 50 of the agricultural machine 1 before the farm work is performed by the agricultural machine 1 in the field, making them visible.
- the actual work trajectory J2 and the actual unworked portion V2 are displayed by the display unit 52 and become visible when the agricultural machine 1 is performing farm work in the field or after the farm work is performed. Therefore, it is possible to improve the convenience and work efficiency when performing farm work with the agricultural machine 1 in the field.
- the agricultural machine 1 has an automatic control unit 61 that executes an automatic traveling work mode in which the working device 2 performs agricultural work while automatically driving the traveling vehicle body 3 .
- the working portion J1 or the unworked portion V1 predicted to be subjected to agricultural work by the automatic operation of the agricultural machine 1 is the agricultural work support device 50. It is displayed on the display unit 52 and becomes visible.
- the field MP2 the travel route L1, the position of the agricultural machine 1, and the actual work by the automatic operation of the agricultural machine 1 are displayed.
- the trajectory J2 or the actual unworked portion V2 is displayed by the display unit 52 and becomes visible. Therefore, it is possible to improve convenience and work efficiency when performing farm work in the automatic traveling work mode of the agricultural machine 1 in the field.
- the agricultural machine 1 of this embodiment includes a traveling vehicle body 3 that can travel, connecting portions 8g and 8h that can connect a work device 2 for performing farm work to the traveling vehicle body 3, and a traveling vehicle that automatically runs the traveling vehicle body 3.
- a route creation unit 51c that creates a route L1
- a replenishment setting unit 51f that sets a replenishment position Pz for replenishing materials used during farm work by the work device 2 at a location outside the travel route L1, and a position of the traveling vehicle body 3.
- the traveling vehicle body 3 of the agricultural machine 1 when the traveling vehicle body 3 of the agricultural machine 1 is automatically driven, it is notified in advance that the traveling vehicle body 3 is headed for the replenishment position Pz. It is possible to prevent the user who sees the behavior of the traveling vehicle body 3 from erroneously recognizing that it is dangerous when heading toward the vehicle. Therefore, it is possible to prevent the user from making an emergency stop of the agricultural machine 1 due to the misidentification, and it is possible to efficiently replenish the material in the agricultural machine 1 . Moreover, as a result, it becomes possible to improve the working efficiency of farm work performed by the agricultural machine 1 .
- the notification unit 51g notifies multiple times at predetermined intervals that the traveling vehicle body 3 will head to the replenishment position Pz before the traveling vehicle body 3 heads to the replenishment position Pz.
- the automatic control unit 61 executes an automatic traveling work mode in which the working device 2 performs agricultural work while automatically driving the traveling vehicle body 3 based on the position of the traveling vehicle body 3 and the traveling route L1.
- the traveling vehicle body 3 reaches a predetermined position Pd on the traveling route L1 immediately before the replenishment position Pz during execution of the automatic traveling work mode, the material replenishment mode in which the traveling vehicle body 3 is automatically moved to the replenishment position Pz is selected.
- the notification unit 51g notifies multiple times at predetermined intervals that the traveling vehicle body 3 is headed for the replenishment position Pz based on the position of the traveling vehicle body 3 and the replenishment position Pz. .
- the material replenishment mode in which the traveling vehicle body 3 is automatically moved to the replenishment position Pz is executed during the execution of the automatic travel work mode in the agricultural machine 1, so that the agricultural machine 1 replenishes the material. can be performed more efficiently.
- the user since it is notified in advance that the traveling vehicle body 3 is heading to the replenishment position Pz during execution of the automatic traveling work mode, the user misunderstands that it is dangerous when the traveling vehicle body 3 is heading to the replenishment position Pz. and the user's emergency stop of the agricultural machine 1 due to the misidentification can be further suppressed.
- the notification unit 51g notifies information indicating a decrease in the remaining amount of materials, the replenishment position Pz, or the behavior of the traveling vehicle body 3 or the work device 2 in the material replenishment mode.
- the travel route L1 includes a plurality of work routes L1a and L1c (straight route L1a and circular route L1c) for performing farm work with the work device 2 while the traveling vehicle body 3 is traveling, and work routes L1a and L1c. and a plurality of turning routes L1b for turning the traveling vehicle body from one to the other.
- work routes L1a and L1c straight route L1a and circular route L1c
- turning routes L1b for turning the traveling vehicle body from one to the other.
- the traveling vehicle body 3 of the agricultural machine 1 traveling in automatic operation moves to the replenishment position Pz before the traveling vehicle body 3 moves to the replenishment position Pz with a certain amount of time to spare. will be notified. Therefore, it is possible to further prevent the user from erroneously recognizing danger when the traveling vehicle body 3 is heading toward the replenishment position Pz and from causing the user to make an emergency stop of the agricultural machine 1 due to the erroneous recognition.
- the notification by the notification unit 51g is performed multiple times at intervals. The emergency stop of the machine 1 can be further suppressed.
- the agricultural machine 1 calculates the remaining amount of the material based on the input amount of the material input to the working device 2 and the consumption amount of the material consumed in the agricultural work by the working device 2.
- the replenishment setting unit 51f is provided with the amount calculation unit 51e, and the replenishment setting unit 51f is set to a lowering position where the remaining amount of materials falls below a predetermined threshold value (remaining amount for entering material replenishment mode) by performing farm work with the work device 2 while the traveling vehicle body 3 is running.
- Pe is predicted, one work route (straight route) L1a including the lowered position Pe is extended in the direction opposite to the traveling direction, and the replenishment position Pz is set on the line L4.
- Notification positions Pa, Pb, and Pc are set on another work route (straight route) L1a that travels before one work route L1a, and when the traveling vehicle body 3 passes through the notification positions Pa, Pb, and Pc, , that the traveling vehicle body 3 is headed for the replenishment position Pz.
- farm work is performed by the work device 2 while the traveling vehicle body 3 of the agricultural machine 1 automatically travels based on one of the work routes L1a including the position Pe where the remaining amount of material is below the threshold value.
- the traveling vehicle body 3 can be automatically moved to the replenishment position Pz to efficiently replenish the materials.
- the traveling vehicle body 3 travels by automatic operation based on the other work route L1a that precedes the one work route L1a, it is notified that the traveling vehicle body 3 is heading toward the replenishment position Pz. Therefore, it is possible to further prevent the user from erroneously recognizing danger when the traveling vehicle body 3 is heading toward the replenishment position Pz and from causing the user to make an emergency stop of the agricultural machine 1 due to the erroneous recognition.
- the agricultural machine 1 is provided with an input unit (display operation unit) 52 for inputting the input amount of materials and the consumption amount of materials per unit area.
- the remaining amount calculation unit 51e calculates the remaining amount of materials based on the input amount of materials, the consumption amount of materials per unit area, and the state of the traveling vehicle body 3 and the work device 2, and the replenishment setting unit 51f. sets the supply position Pz based on the remaining amount of materials, and the notification unit 51g sets notification positions Pa, Pb, and Pc based on the supply position Pz. According to this configuration, it is possible to accurately calculate the remaining amount of material and appropriately set the replenishment position Pz and the notification positions Pa, Pb, and Pc.
- the agricultural machine 1 includes a threshold change unit (display operation unit) 52 that changes the threshold (remaining amount for entering material replenishment mode).
- a threshold change unit display operation unit 52 that changes the threshold (remaining amount for entering material replenishment mode).
- the agricultural machine 1 includes a display unit 5 (display operation unit) 52 that displays the notification of the notification unit 51g on the screen. Thereby, the user can see the notification displayed by the display unit 52 and can easily recognize in advance that the traveling vehicle body 3 is going to the replenishment position Pz.
- a display unit 5 display operation unit
- the agricultural machine 1 includes an alarm unit 63 that issues an alarm by sound or light indicating the notification of the notification unit 51g. This makes it possible for the user or the like around the traveling vehicle body 3 to easily recognize in advance that the traveling vehicle body 3 is going to the replenishment position Pz.
- the agricultural work support device 50 of the present embodiment is an agricultural work support device mounted on the agricultural machine 1, and includes a route creation unit 51c that creates a travel route L1 for automatically driving the traveling vehicle body 3 of the agricultural machine 1. , a replenishment setting unit 51f for setting a replenishment position Pz at which the work device 2 connected to the traveling vehicle body 3 replenishes materials used during agricultural work at a location outside the travel route L1; a notification unit 51g for notifying that the traveling vehicle body 3 is headed for the supply position Pz when the agricultural machine 1 is automatically driving the traveling vehicle body 3 based on the position of the vehicle body 3 and the traveling route L1. .
- the notification unit 51g of the agricultural work support device 50 notifies in advance that the traveling vehicle body 3 is heading for the replenishment position Pz. . Therefore, when the traveling vehicle body 3 moves toward the replenishment position Pz, it is possible to prevent the user from erroneously recognizing that it is dangerous and from causing the user to make an emergency stop of the agricultural machine 1 due to the erroneous recognition. Materials can be supplied efficiently. Moreover, as a result, it becomes possible to improve the working efficiency of farm work performed by the agricultural machine 1 .
- the agricultural work support device 50 includes a remaining amount calculation unit 51e for calculating the remaining amount of materials necessary for the replenishment setting unit 51f to set the replenishment position Pz, and the remaining amount calculation unit 51e.
- An input unit (display operation unit) 52 for inputting parameters necessary for calculating the remaining amount
- a display unit (display operation unit) for displaying the traveling route L1, the position of the traveling vehicle body 3, and the notification of the notification unit 51g. 52 and .
- the user inputs the parameters necessary for calculating the remaining amount of material through the input unit 52 of the agricultural work support device 50, and displays an advance notification that the traveling vehicle body 3 will head to the replenishment position Pz. It can be visually recognized by the portion 52, and convenience can be improved. Further, as a result, it is possible to further prevent the user from erroneously recognizing danger when the traveling vehicle body 3 is heading toward the replenishment position Pz and from causing the user to make an emergency stop of the agricultural machine 1 due to the erroneous recognition. In 1, materials can be replenished more efficiently.
- the agricultural work support system 100 of the present embodiment includes the agricultural machine 1 and the agricultural work support device 50 mounted on the agricultural machine 1.
- the farm work support device 50 automatically drives the traveling vehicle body 3 of the agricultural machine 1.
- a route creation unit 51c that creates a travel route L1 to be traveled, and a replenishment setting that sets a replenishment position Pz for replenishing materials used by the work device 2 connected to the traveling vehicle body 3 during farm work at a location outside the travel route L1.
- the notification unit 51g of the agricultural work support device 50 indicates that the traveling vehicle body 3 is heading toward the supply position Pz. You will be notified in advance. Therefore, when the traveling vehicle body 3 is heading toward the replenishment position Pz, the user's misunderstanding that the agricultural machine 1 is in danger and the user's emergency stop of the agricultural machine 1 due to the misunderstanding are further suppressed. It is possible to replenish materials more efficiently in In addition, based on the position of the traveling vehicle body 3 detected by the position detection unit 40, the notification unit 51g of the agricultural work support device 50 can notify in advance that the traveling vehicle body 3 is heading toward the replenishment position Pz.
- the automatic control unit 61 of the agricultural machine 1 acquires the travel route L1 and the replenishment position Pz set by the agricultural work support device 50, and based on these, the traveling vehicle body 3 is automatically driven while the working device 2 It is possible to carry out agricultural work and move the traveling vehicle body 3 to the replenishment position Pz by automatic operation, so that the agricultural work and material replenishment can be performed more efficiently.
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Soil Sciences (AREA)
- Environmental Sciences (AREA)
- Mechanical Engineering (AREA)
- Guiding Agricultural Machines (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
本発明の一態様にかかる農業機械は、走行可能な走行車体と、農作業を行うための作業装置を走行車体に連結可能な連結部と、走行車体を自動運転で走行させる走行ルートを作成するルート作成部と、走行ルートから外れた箇所に、作業装置による農作業時に用いる資材の補給を行う補給位置を設定する補給設定部と、走行車体の位置を検出する位置検出部と、走行車体の位置と走行ルートとに基づいて走行車体を自動運転で走行させ、且つ走行車体を補給位置まで移動させる自動制御部と、自動制御部が走行車体を自動運転で走行させている際に、走行車体が補給位置に向かうことを通知する通知部と、を備える。
また、本発明の一態様では、自動制御部は、走行車体の位置と走行ルートとに基づいて走行車体を自動運転で走行させながら作業装置により農作業を行う自動走行作業モードを実行し、自動走行作業モードの実行中に、走行車体が補給位置の直前にある走行ルート上の所定位置に到達すると、走行車体を自動運転で補給位置まで移動させる資材補給モードを実行し、通知部は、自動走行作業モードの実行中に、走行車体の位置と補給位置とに基づいて、走行車体が補給位置に向かうことを通知する。
また、本発明の一態様では、走行ルートには、走行車体を走行させながら作業装置により農作業を行う複数の作業ルートと、作業ルートの一方から他方に向かって走行車体を旋回させる複数の旋回ルートと、が含まれ、通知部は、走行車体が補給位置に向かうときより前の作業ルート又は旋回ルートに基づいて走行する際に、走行車体が補給位置に向かうことを通知する。
また、本発明の一態様では、農業機械は、通知部の前記通知を画面に表示する表示部を備える。
また、本発明の一態様では、農業機械は、通知部の前記通知を示す音又は光による警報を発する警報部を備える。
図24は、農業機械1の側方全体図である。本実施形態の農業機械1は、トラクタから構成されている。なお、農業機械1は、トラクタに限定せず、例えば田植機やコンバイン等の他の農業機械、或いは農作業を行うトラクタ以外の作業車両等により構成されてもよい。
図1は、農作業支援システム100の構成図である。
農作業支援システム100は農作業支援装置50を含んでいる。農作業支援システム100及び農作業支援装置50は、圃場で農業機械1の走行車体3を走行させながら作業装置2により農作業を行うことを支援する。
農作業支援装置50が起動すると、制御部51は、図3に示すホーム画面D1を表示操作部52に表示させる。このホーム画面D1のデータと以降で説明する各画面D2~D9のデータは、記憶部53に記憶されている。制御部51は、必要に応じて記憶部53からデータを読み出して、当該データに基づく画面を表示操作部52に表示させる。
圃場登録画面D2には、マップMP1、農業機械1の走行車体3の位置Pv、新規キーB4、登録キーB5、呼出キーB6、取消キーB7、及び戻るキーB8が表示されている。マップMP1には、測位装置40から取得した農業機械1の周辺の地図を示した画像が表示されている。また、マップMP1には、農業機械1が農作業を行う圃場が表示されていて、緯度と経度等の位置情報が対応付けられている。ユーザがマップMP1上で所定操作を行うことで、マップMP1に表示されている地図が拡縮されたり、当該地図の表示箇所が移動したりする。
なお、ルート作成部51cが走行ルートL1を作成すると、直ぐに軌跡演算部51dが予測作業軌跡J1を演算して、当該予測作業軌跡J1のデータを記憶部53に記憶させてもよい。そして、ユーザが軌跡予測キーB14を選択したときに、制御部51が予測作業軌跡J1のデータを記憶部53から読み出して、当該データに基づいて予測作業軌跡J1をルート作成2画面D7に表示させてもよい。また、軌跡演算部51dは、走行ルートL1のうち、直線状の作業ルートだけでなく、曲線状の作業ルートに沿って作業装置2を移動させた場合における、作業装置2の作業幅の通過部分を予測作業軌跡J1として求めてもよい。
走行制御画面D8は、自動走行作業モードにおける農業機械1の走行状態と作業状態を表示する画面である。なお、図12に示す走行制御画面D8では、自動走行作業モードが開始されてからしばらくした後の農業機械1の走行状態と作業状態を例示している。走行制御画面D8には、圃場マップMP2、走行ルートL1、スタート位置Ps、ゴール位置Pg、農業機械マークX2、農業機械1の走行状態、設定変更キーB20、作業軌跡キーB15、及び軌跡クリアキーB16が表示されている。
例えば図14Aに示すように、ユーザがルート作成2画面D7中の中央部の重なり代の入力欄にマイナスの数値を入力し、他の入力欄に適宜数値を入力して、ルート作成キーB13を選択する。すると、エリア設定部51bにより設定されたエリアC1、E1と、ルート作成部51cにより作成された走行ルートL1等が圃場マップMP2上に表示される。
農業機械1が作業装置2により行う対地作業には、資材を用いて行う作業が含まれている。具体的には、例えば肥料、農薬、種、又は苗等の資材を用いて行う施肥作業、農薬散布作業、播種作業、苗移植作業等がある。これらの場合、作業装置2は、散布装置、播種装置、又は移植装置等から構成されて、農業機械1の走行車体3に連結される。また、作業装置2に備わる制御部は、当該作業装置2に設けられた供給機構の動作を制御して、圃場に対して供給する資材の供給量や供給タイミングを調整する。また、作業装置2の制御部は、圃場に対する資材の供給の開始や終了を示す信号を、通信部により車載ネットワークN1を経由して農業機械1の制御装置60(図1)に送信する。
農業機械1で自動走行作業モードが開始されると、自動制御部61が走行ルートL1と、測位装置40により検出された走行車体3の位置とに基づいて、走行車体3を自動運転で走行させながら作業装置2により対地作業をして行く。そして、走行車体3の位置が補給位置Pzの直前にある旋回ルートL1bを経由して、当該旋回ルートL1bと低下位置Peを含んだ直進ルートL1aとの接続点Pdに到達すると、自動制御部61が自動走行作業モードを一旦停止した後に資材補給モードに移行する。接続点Pdは、自動走行作業モードと資材補給モードのうち、一方のモードから他方のモードへ移行する所定位置である。
以上説明した本実施形態の農作業支援システム100、農作業支援装置50、及び農業機械1は、以下の効果を奏する。
本実施形態の農作業支援装置50は、登録された圃場(圃場マップ)MP2において農業機械1を走行させる走行ルートL1を作成するルート作成部51cと、農業機械1が走行ルートL1に基づいて走行しながら当該農業機械1に連結された作業装置2により農作業を行うことが予測される作業部分(予測作業軌跡)J1又は作業装置2により農作業を行わないことが予測される未作業部分V1を表示する表示部(表示操作部)52と、を備える。この構成によれば、圃場において農業機械1により農作業を行う前に、予測される作業部分J1又は未作業部分V1が表示部52により表示されて視認可能になるので、当該農作業を行う際の利便性と作業効率を向上させることができる。
本実施形態の農業機械1は、走行可能な走行車体3と、農作業を行うための作業装置2を走行車体3に連結可能な連結部8g、8hと、走行車体3を自動運転で走行させる走行ルートL1を作成するルート作成部51cと、走行ルートL1から外れた箇所に、作業装置2による農作業時に用いる資材の補給を行う補給位置Pzを設定する補給設定部51fと、走行車体3の位置を検出する位置検出部(測位装置)40と、走行車体3の位置と走行ルートL1とに基づいて走行車体3を自動運転で走行させ、且つ走行車体3を補給位置Pzまで移動させる自動制御部61と、自動制御部61が走行車体3を自動運転で走行させている際に、走行車体3が補給位置Pzに向かうことを通知する通知部51gと、を備える。
2 :作業装置
3 :走行車体
8g、8h :連結部
40 :測位装置(位置検出部)
50 :農作業支援装置
51c :ルート作成部
51e :残量演算部
51f :補給設定部
51g :通知部
52 :表示操作部(表示部、入力部、閾値変更部)
54 :通信部
61 :自動制御部
63 :警報部
100 :農作業支援システム
L1 :走行ルート
L1a :直進ルート(作業ルート)
L1b :旋回ルート
L1c :周回ルート(作業ルート)
L4 :延長線
Pa、Pb、Pc:通知位置
Pd :接続点(所定位置)
Pe :低下位置
Pv :走行車体の位置
Pz :補給位置
U1、U2、U3:通知
X2 :農業機械マーク(走行車体の位置)
Claims (14)
- 走行可能な走行車体と、
農作業を行うための作業装置を前記走行車体に連結可能な連結部と、
前記走行車体を自動運転で走行させる走行ルートを作成するルート作成部と、
前記走行ルートから外れた箇所に、前記作業装置による農作業時に用いる資材の補給を行う補給位置を設定する補給設定部と、
前記走行車体の位置を検出する位置検出部と、
前記走行車体の位置と前記走行ルートとに基づいて前記走行車体を自動運転で走行させ、且つ前記走行車体を前記補給位置まで移動させる自動制御部と、
前記自動制御部が前記走行車体を自動運転で走行させている際に、前記走行車体が前記補給位置に向かうことを通知する通知部と、を備えた農業機械。 - 前記通知部は、前記走行車体が前記補給位置に向かう前に、前記走行車体が前記補給位置に向かうことを所定の間隔で複数回通知する請求項1に記載の農業機械。
- 前記自動制御部は、
前記走行車体の位置と前記走行ルートとに基づいて前記走行車体を自動運転で走行させながら前記作業装置により農作業を行う自動走行作業モードを実行し、
前記自動走行作業モードの実行中に、前記走行車体が前記補給位置の直前にある前記走行ルート上の所定位置に到達すると、前記走行車体を自動運転で前記補給位置まで移動させる資材補給モードを実行し、
前記通知部は、前記自動走行作業モードの実行中に、前記走行車体の位置と前記補給位置とに基づいて、前記走行車体が前記補給位置に向かうことを通知する請求項1又は2に記載の農業機械。 - 前記通知部は、前記資材の残量の低下、前記補給位置、又は前記資材補給モードでの前記走行車体若しくは前記作業装置の挙動を示す情報を通知する請求項1~3のいずれか1項に記載の農業機械
- 前記走行ルートには、前記走行車体を走行させながら前記作業装置により農作業を行う複数の作業ルートと、前記作業ルートの一方から他方に向かって前記走行車体を旋回させる複数の旋回ルートと、が含まれ、
前記通知部は、前記走行車体が前記補給位置に向かうときより前の前記作業ルート又は前記旋回ルートに基づいて走行する際に、前記走行車体が前記補給位置に向かうことを通知する請求項1~4のいずれか1項に記載の農業機械。 - 前記作業装置に投入された前記資材の投入量と、前記作業装置による農作業で消費する前記資材の消費量とに基づいて、前記資材の残量を演算する残量演算部を備え、
前記補給設定部は、前記走行車体を走行させながら前記作業装置で農作業を行うことにより前記資材の残量が所定の閾値を下回る低下位置を予測し、当該低下位置を含んだ一方の前記作業ルートを進行方向と反対側に延長した線上に前記補給位置を設定し、
前記通知部は、前記走行車体が前記一方の作業ルートよりも前に走行する他の前記作業ルート上に通知位置を設定し、当該通知位置を前記走行車体が通過する際に、前記走行車体が前記補給位置に向かうことを通知する請求項5に記載の農業機械。 - 前記資材の投入量と前記資材の単位面積当たりの消費量とを入力する入力部を備え、
前記走行車体の自動運転による走行前又は走行中に、
前記残量演算部は、前記資材の投入量、前記資材の単位面積当たりの消費量、及び前記走行車体と前記作業装置の状態に基づいて前記資材の残量を演算し、
前記補給設定部は、前記資材の残量に基づいて前記補給位置を設定し、
前記通知部は、前記補給位置に基づいて前記通知位置を設定する請求項6に記載の農業機械。 - 前記閾値を変更する閾値変更部を備えた請求項6又は7に記載の農業機械。
- 前記通知部の前記通知を画面に表示する表示部を備えた請求項1~8のいずれか1項に記載の農業機械。
- 前記通知部の前記通知を示す音又は光による警報を発する警報部を備えた請求項1~9のいずれか1項に記載の農業機械。
- 農業機械の走行車体を自動運転で走行させる走行ルートを作成するルート作成部と、
前記走行ルートから外れた箇所に、前記走行車体に連結された作業装置が農作業時に用いる資材の補給を行う補給位置を設定する補給設定部と、
位置検出部により検出された前記走行車体の位置と前記走行ルートとに基づいて、前記農業機械が前記走行車体を自動運転で走行させている際に、前記走行車体が前記補給位置に向かうことを通知する通知部と、を有する農作業支援装置。 - 前記補給設定部が前記補給位置を設定するために必要な前記資材の残量を演算する残量演算部と、
前記残量演算部が前記資材の残量を演算するために必要なパラメータを入力する入力部と、
前記走行ルート、前記走行車体の位置、及び前記通知部の通知を表示する表示部と、を有する請求項11に記載の農作業支援装置。 - 農業機械の走行車体を自動運転で走行させる走行ルートを作成するルート作成部と、
前記走行ルートから外れた箇所に、前記走行車体に連結された作業装置が農作業時に用いる資材の補給を行う補給位置を設定する補給設定部と、
前記走行車体の位置を検出する位置検出部と、
前記走行車体の位置と前記走行ルートとに基づいて前記走行車体を自動運転で走行させ、且つ前記走行車体を前記補給位置まで移動させる自動制御部と、
前記自動制御部が前記位置検出部により検出された前記走行車体の位置と前記走行ルートとに基づいて前記走行車体を自動運転で走行させている際に、前記走行車体が前記補給位置に向かうことを通知する通知部と、を含む農作業支援システム。 - 前記農業機械と、
前記農業機械に搭載される農作業支援装置と、を含み、
前記農業機械は、前記位置検出部と前記自動制御部とを備え、
前記農作業支援装置は、前記ルート作成部と前記補給設定部と前記通知部と、前記自動制御部及び前記位置検出部と通信するための通信部とを有する請求項13に記載の農作業支援システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023500575A JPWO2022176352A1 (ja) | 2021-02-16 | 2021-12-14 | |
| CN202180093814.2A CN116963589A (zh) | 2021-02-16 | 2021-12-14 | 农业机械、农作业支援装置、农作业支援系统 |
| EP21926777.0A EP4295653A1 (en) | 2021-02-16 | 2021-12-14 | Farm machine, farm work support device, farm work support system |
| US18/231,853 US20230380323A1 (en) | 2021-02-16 | 2023-08-09 | Agricultural machine, agricultural work assistance apparatus, and agricultural work assistance system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021022620 | 2021-02-16 | ||
| JP2021-022620 | 2021-02-16 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/231,853 Continuation US20230380323A1 (en) | 2021-02-16 | 2023-08-09 | Agricultural machine, agricultural work assistance apparatus, and agricultural work assistance system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022176352A1 true WO2022176352A1 (ja) | 2022-08-25 |
Family
ID=82931371
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/046011 WO2022176352A1 (ja) | 2021-02-16 | 2021-12-14 | 農業機械、農作業支援装置、農作業支援システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230380323A1 (ja) |
| EP (1) | EP4295653A1 (ja) |
| JP (1) | JPWO2022176352A1 (ja) |
| CN (1) | CN116963589A (ja) |
| WO (1) | WO2022176352A1 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150319913A1 (en) * | 2014-05-11 | 2015-11-12 | Cnh Industrial America Llc | Mission control system and method for an agricultural system |
| JP2016007196A (ja) * | 2014-06-26 | 2016-01-18 | 株式会社クボタ | 植播系水田作業機 |
| JP2018000039A (ja) | 2016-06-28 | 2018-01-11 | 株式会社クボタ | 作業車 |
| JP2020103092A (ja) * | 2018-12-26 | 2020-07-09 | 株式会社クボタ | 走行支援装置、走行支援装置を備えた作業車両及び走行支援方法 |
| JP2020129393A (ja) * | 2016-12-05 | 2020-08-27 | ヤンマーパワーテクノロジー株式会社 | 経路生成システム |
| JP2020184974A (ja) * | 2019-05-17 | 2020-11-19 | ヤンマーパワーテクノロジー株式会社 | 作業車両用の自動走行システム |
-
2021
- 2021-12-14 WO PCT/JP2021/046011 patent/WO2022176352A1/ja active Application Filing
- 2021-12-14 JP JP2023500575A patent/JPWO2022176352A1/ja active Pending
- 2021-12-14 EP EP21926777.0A patent/EP4295653A1/en active Pending
- 2021-12-14 CN CN202180093814.2A patent/CN116963589A/zh active Pending
-
2023
- 2023-08-09 US US18/231,853 patent/US20230380323A1/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150319913A1 (en) * | 2014-05-11 | 2015-11-12 | Cnh Industrial America Llc | Mission control system and method for an agricultural system |
| JP2016007196A (ja) * | 2014-06-26 | 2016-01-18 | 株式会社クボタ | 植播系水田作業機 |
| JP2018000039A (ja) | 2016-06-28 | 2018-01-11 | 株式会社クボタ | 作業車 |
| JP2020129393A (ja) * | 2016-12-05 | 2020-08-27 | ヤンマーパワーテクノロジー株式会社 | 経路生成システム |
| JP2020103092A (ja) * | 2018-12-26 | 2020-07-09 | 株式会社クボタ | 走行支援装置、走行支援装置を備えた作業車両及び走行支援方法 |
| JP2020184974A (ja) * | 2019-05-17 | 2020-11-19 | ヤンマーパワーテクノロジー株式会社 | 作業車両用の自動走行システム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4295653A1 (en) | 2023-12-27 |
| CN116963589A (zh) | 2023-10-27 |
| US20230380323A1 (en) | 2023-11-30 |
| JPWO2022176352A1 (ja) | 2022-08-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018055922A1 (ja) | 経路生成システム | |
| JP6804999B2 (ja) | 作業走行管理システム | |
| WO2018105400A1 (ja) | 経路生成システム | |
| WO2021044971A1 (ja) | 農業機械 | |
| WO2022244435A1 (ja) | 農作業支援システム、農作業支援装置、農業機械 | |
| WO2021044970A1 (ja) | 作業車両及び作業車両の作業支援装置 | |
| WO2023189015A1 (ja) | 農作業支援システム、農業機械、農作業支援装置、農業機械の走行ルート作成方法 | |
| WO2022176352A1 (ja) | 農業機械、農作業支援装置、農作業支援システム | |
| WO2022176351A1 (ja) | 農作業支援装置、農作業支援システム、農業機械 | |
| JP2023097952A (ja) | 農業機械、農作業支援システム | |
| JP6953304B2 (ja) | 作業場管理システム | |
| WO2021125124A1 (ja) | 作業機 | |
| KR20230034132A (ko) | 자동 주행 방법, 자동 주행 시스템, 및 자동 주행 프로그램 | |
| JP7102332B2 (ja) | 走行支援装置、走行支援装置を備えた作業車両 | |
| WO2023127267A1 (ja) | 農作業支援システム、農業機械、農作業支援装置 | |
| KR20230029589A (ko) | 수확기, 수확기의 자동 주행 방법, 프로그램, 기록 매체, 시스템, 농작업기, 농작업기의 자동 주행 방법, 방법, 자동 조타 관리 시스템 | |
| JP7536740B2 (ja) | 農作業支援システム、農業機械、農作業支援装置 | |
| JP2020106976A (ja) | 走行支援装置、走行支援装置を備えた作業車両及び走行支援方法 | |
| WO2023127266A1 (ja) | 農作業支援システム、農業機械、農作業支援装置 | |
| WO2024135025A1 (ja) | 農作業支援システム、農業機械 | |
| EP4406395A1 (en) | Travel assistance system for agricultural machine | |
| JP2024090660A (ja) | 農作業支援装置、農作業支援システム、農業機械、走行ライン作成方法 | |
| JP2024090661A (ja) | 農作業支援装置、農作業支援システム、農業機械、走行ライン作成方法 | |
| CN117279492A (zh) | 农业作业辅助系统、农业作业辅助装置、农业机械 | |
| JP2023097950A (ja) | 農作業支援システム、農業機械、農作業支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21926777 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023500575 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202180093814.2 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2021926777 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021926777 Country of ref document: EP Effective date: 20230918 |