WO2022059463A1 - 広角レンズおよび撮像装置 - Google Patents
広角レンズおよび撮像装置 Download PDFInfo
- Publication number
- WO2022059463A1 WO2022059463A1 PCT/JP2021/031610 JP2021031610W WO2022059463A1 WO 2022059463 A1 WO2022059463 A1 WO 2022059463A1 JP 2021031610 W JP2021031610 W JP 2021031610W WO 2022059463 A1 WO2022059463 A1 WO 2022059463A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- lens
- negative
- wide
- image
- angle
- Prior art date
Links
Images





























Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/04—Reversed telephoto objectives
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/18—Optical objectives specially designed for the purposes specified below with lenses having one or more non-spherical faces, e.g. for reducing geometrical aberration
Definitions
- the present disclosure relates to a wide-angle lens having a focusing function and an image pickup apparatus provided with such a wide-angle lens.
- the retrofocus type optical system is relatively easy to widen while ensuring the flange back, but it is a restriction on the miniaturization of the optical system because it can take a long flange back. Moreover, it is difficult to correct various aberrations.
- the wide-angle lens according to the embodiment of the present disclosure is a first negative lens, a diaphragm, a first negative lens, and a diaphragm, which are arranged on the most object side and consist of a negative meniscus lens having a convex surface facing the object side.
- L1 ⁇ d ⁇ Lk ⁇ d ⁇ Ln ⁇ d ?? (1) Ln ⁇ d ⁇ 35 ; (2) However, L1 ⁇ d: Abbe number of the first negative lens Ln ⁇ d: Abbe number of the nth negative lens Lk ⁇ d: Abbe number of the kth negative lens (k 2, ..., N-1) And.
- the image pickup apparatus includes a wide-angle lens and an image pickup element that outputs an image pickup signal corresponding to an optical image formed by the wide-angle lens, and the wide-angle lens is the embodiment of the present disclosure. It is composed of a wide-angle lens according to the form.
- n (n ⁇ 4) negative lenses are arranged on the object side of the aperture
- various aberrations are present despite the small size and large diameter. Is well corrected, and the configuration of each negative lens is optimized so that high optical performance can be achieved over the entire screen.
- FIG. 1 It is a lens sectional view which shows the 1st structural example (Example 1) of the wide-angle lens which concerns on one Embodiment of this disclosure. It is an aberration diagram which shows the longitudinal aberration at the time of infinity focusing of the wide-angle lens which concerns on Example 1.
- FIG. It is an aberration diagram which shows the longitudinal aberration at the time of short-distance focusing of the wide-angle lens which concerns on Example 1.
- FIG. It is an aberration diagram which shows the lateral aberration at the time of infinity focusing of the wide-angle lens which concerns on Example 1.
- FIG. 2nd structural example (Example 2) of the wide-angle lens which concerns on one Embodiment It is an aberration diagram which shows the longitudinal aberration at the time of infinity focusing of the wide-angle lens which concerns on Example 2.
- FIG. 2 It is an aberration diagram which shows the longitudinal aberration at the time of short-distance focusing of the wide-angle lens which concerns on Example 2.
- FIG. 2 It is an aberration diagram which shows the lateral aberration at the time of infinity focusing of the wide-angle lens which concerns on Example 2.
- FIG. 3 It is a lens sectional view which shows the 3rd structural example (Example 3) of the wide-angle lens which concerns on one Embodiment. It is an aberration diagram which shows the longitudinal aberration at the time of infinity focusing of the wide-angle lens which concerns on Example 3.
- FIG. 2 It is an aberration diagram which shows the longitudinal aberration at the time of short-distance focusing of the wide-angle lens which concerns on Example 3.
- FIG. It is an aberration diagram which shows the lateral aberration at the time of infinity focusing of the wide-angle lens which concerns on Example 3.
- FIG. It is an aberration diagram which shows the lateral aberration at the time of short-distance focusing of the wide-angle lens which concerns on Example 3.
- FIG. 3 It is an aberration diagram which shows the lateral aberration at the time of short-distance focusing of the wide-angle lens which concerns on Example 3.
- FIG. 4 It is a lens sectional view which shows the 4th structural example (Example 4) of the wide-angle lens which concerns on one Embodiment. It is an aberration diagram which shows the longitudinal aberration at the time of infinity focusing of the wide-angle lens which concerns on Example 4.
- FIG. It is an aberration diagram which shows the longitudinal aberration at the time of short-distance focusing of the wide-angle lens which concerns on Example 4.
- FIG. It is an aberration diagram which shows the lateral aberration at the time of infinity focusing of the wide-angle lens which concerns on Example 4.
- FIG. It is an aberration diagram which shows the lateral aberration at the time of short-distance focusing of the wide-angle lens which concerns on Example 4.
- FIG. 5 It is a lens sectional view which shows the 5th structural example (Example 5) of the wide-angle lens which concerns on one Embodiment. It is an aberration diagram which shows the longitudinal aberration at the time of infinity focusing of the wide-angle lens which concerns on Example 5.
- the retrofocus type optical system is relatively easy to widen the angle while ensuring the flange back, but it is a restriction on the miniaturization of the optical system because a long flange back can be taken. Further, since it is composed of a lens group having a strong negative refractive power on the object side and a lens group having a strong positive refractive power on the image plane side, it is difficult to suppress coma. In addition, it becomes difficult to suppress various aberrations such as chromatic aberration due to the increase in diameter.
- Patent Document 1 Japanese Unexamined Patent Publication No. 2014-202952
- various aberrations associated with an increase in aperture are corrected by adopting a Gaussian type configuration in which the rear group is symmetrical to the aperture stop.
- the positive refractive power on the image plane side is strong, which is disadvantageous for shortening the total length, and it is difficult to suppress coma.
- Patent Document 2 Japanese Unexamined Patent Publication No. 2016-126279
- the focus group is lightened by fixing the aperture stop, while the rear group maintains a symmetric optical system close to the Gaussian type. Therefore, the positive refractive power on the image plane side is strong, which is disadvantageous for shortening the total length, and it is difficult to suppress coma.
- FIG. 1 shows a first configuration example of a wide-angle lens according to an embodiment of the present disclosure, and corresponds to the configuration of the first embodiment described later.
- FIG. 6 shows a second configuration example of the wide-angle lens according to the embodiment, and corresponds to the configuration of the second embodiment described later.
- FIG. 11 shows a third configuration example of the wide-angle lens according to the embodiment, and corresponds to the configuration of the third embodiment described later.
- FIG. 16 shows a fourth configuration example of the wide-angle lens according to the embodiment, and corresponds to the configuration of the fourth embodiment described later.
- FIG. 21 shows a fifth configuration example of the wide-angle lens according to the embodiment, and corresponds to the configuration of the fifth embodiment described later.
- Z1 indicates an optical axis.
- An optical member such as a cover glass for protecting the image pickup device may be arranged between the wide-angle lenses 1 to 5 according to the first to fifth configuration examples and the image plane IMG. Further, in addition to the cover glass, various optical filters such as a low-pass filter and an infrared cut filter may be arranged as optical members.
- the configuration of the wide-angle lens according to the embodiment of the present disclosure will be described in association with the wide-angle lenses 1 to 5 according to each configuration example shown in FIG. It is not limited to the configuration example.
- the wide-angle lens according to the embodiment includes a first negative lens L1 composed of a negative meniscus lens having a convex surface facing the object side, an aperture stop St, and a first negative lens L1.
- a second to nth (n ⁇ 4) negative lenses arranged in order from the object side to the image plane side are provided between the aperture diaphragm St and the lens.
- the wide-angle lens according to the embodiment includes a biconvex air lens La1 formed on an optical path between the second negative lens L2 and the third negative lens L3.
- the "negative lens" of the first to nth negative lenses is a single lens having a negative refractive power by regarding the junction lens as a combination of a plurality of single lenses.
- the junction lens is regarded as a combination of two single lenses.
- the wide-angle lens according to the embodiment satisfies the following conditional expressions (1) and (2).
- L1 ⁇ d ⁇ Lk ⁇ d ⁇ Ln ⁇ d > (1) Ln ⁇ d ⁇ 35 ; (2)
- L1 ⁇ d Abbe number of the first negative lens
- L1 Ln ⁇ d Abbe number of the nth negative lens
- Ln Lk ⁇ d Abbe number of the kth negative lens
- Lk (k 2, ..., N-1)
- L1 ⁇ d Abbe number of the first negative lens
- L1 Ln ⁇ d Abbe number of the nth negative lens
- Ln Lk ⁇ d Abbe number of the kth negative lens
- the wide-angle lens according to the embodiment further satisfies the predetermined conditional expression and the like described later.
- the configuration of each negative lens is optimized, so that the size is small and large.
- various aberrations are satisfactorily corrected, and high optical performance can be realized over the entire screen.
- a first negative lens L1 composed of a negative meniscus lens having a convex surface facing the object side is arranged on the most object side, and from the first negative lens L1 to the aperture stop St. It has four or more negative lenses.
- the wide-angle lens according to the embodiment it is possible to satisfactorily correct coma by having the first negative lens L1 composed of the negative meniscus lens.
- a glass material with a high Abbe number for the first negative lens L1 arranged on the most object side and gradually using a glass material with a low Abbe number as it approaches the aperture stop St four or more negative lenses are used.
- the negative refractive power can be divided on the object side of the aperture aperture St, the occurrence of aberrations of each negative lens can be suppressed, and various aberrations such as distortion and curvature of field can be suppressed. It is possible to provide a large-diameter wide-angle lens that can be corrected satisfactorily and a good image can be obtained over the entire screen.
- the lens arranged on the object side of the aperture stop St plays the role of a wide converter that secures sufficient back focus while increasing the angle of view. Since the lens placed on the object side of the aperture stop St plays the role of a wide converter, it is necessary to arrange the retrofocus type refractive power with the object side as the negative refractive power and the image plane side as the positive refractive power. be. In this case, by arranging the aspherical negative menis lens L1 having a small cornic coefficient with respect to the aperture stop St, it is possible to correct distortion and curvature of field and reduce the size.
- the lens arranged on the object side of the aperture stop St plays the role of a wide converter. Therefore, on the object side of the aperture stop St, it is necessary to arrange the refractive power of the retrofocus type with the object side as the negative refractive power and the image plane side as the positive refractive power.
- the wide-angle lens according to the embodiment by having the biconvex air lens La1 between the second negative lens L2 and the third negative lens L3, the first negative on the object side from the aperture aperture St.
- the negative refractive power of the lens L1 can be suppressed, and various aberrations such as distortion can be corrected.
- the above conditional expression (1) is a preferable condition for suppressing the occurrence of axial chromatic aberration while satisfactorily correcting the chromatic aberration of magnification in the wide-angle lens.
- a glass material having a relatively low Abbe number is used for the negative lens on the object side, the effect of correcting chromatic aberration of magnification is weak.
- a glass material having a high Abbe number is used for the negative lens near the aperture stop St, not only the effect of correcting chromatic aberration of magnification is weak, but also axial chromatic aberration is generated, which makes it difficult to correct it satisfactorily.
- conditional expression (1) is preferable because the chromatic aberration can be corrected more satisfactorily by further satisfying the following conditions.
- L1 ⁇ d ⁇ Lm-1 ⁇ ⁇ d ⁇ Lm ⁇ d > (1)'
- conditional expression (2) is a preferable condition for suppressing the axial chromatic aberration generated in the nth negative lens Ln located at the position closest to the aperture stop St among the plurality of negative lenses on the object side of the aperture stop St. It regulates. If the upper limit of the conditional expression (2) is exceeded, the correction of the axial chromatic aberration will be insufficient and it will be difficult to eliminate the aberration.
- the wide-angle lens according to the embodiment satisfies the following conditional expression (3). -60 ⁇ fLa1 ⁇ -20 together with (3)
- fLa1 The focal length of the air lens La1.
- the air lens La1 has a negative refractive power.
- the air lens La1 plays a role of suppressing the negative refractive power of the first negative lens L1 that causes distortion and coma.
- the conditional expression (3) defines preferable conditions for the air lens La1 to effectively play its role.
- the negative refractive power of the first negative lens L1 becomes stronger, so that distortion and coma are greatly generated, and the lens succeeding the first negative lens L1. This is not preferable because it becomes difficult to correct various aberrations and the role of the air lens La1 having a negative refractive power cannot be sufficiently fulfilled.
- the lower limit value of the conditional expression (3) to ⁇ 55
- the negative refractive power of the first negative lens L1 can be further suppressed, which is preferable.
- the lower limit value of the conditional expression (3) to ⁇ 50, the negative refractive power of the first negative lens L1 can be further suppressed, which is more preferable.
- the wide-angle lens according to the embodiment includes a first lens group G1 having a first to nth negative lens, an aperture aperture St, and the like, in order from the object side to the image plane side along the optical axis Z1.
- the configuration may include a second lens group G2 having a plurality of lenses and having a positive refractive power. In this case, it is desirable that a part of the lenses of the entire second lens group G2 or the plurality of lenses of the second lens group G2 move in the optical axis direction during focusing. This makes it possible to simplify the mechanical mechanism.
- the entire second lens group G2 is regarded as the focus group.
- a part of the lenses of the second lens group G2 is set as the focus group.
- FIG. 1 and the like show the lens arrangement at infinity focusing.
- the moving direction of the focus group when focusing from infinity to a short distance is indicated by an arrow.
- the wide-angle lens according to the embodiment satisfies the following conditional expression (4). 5.5 ⁇
- / f > (4)
- f Focal length of the entire system in the state of focusing at infinity
- f1 Focal length of the first lens group G1.
- the first lens group G1 plays a role similar to that of a wide converter, and by bringing it closer to an afocal optical system, it is possible to suppress the occurrence of distortion and spherical aberration. Further, since the refractive power of the first lens group G1 becomes stronger, the outer diameter of the negative meniscus lens and the size of the aperture diameter are changed, which affects the outer diameter of the lens as a product.
- Conditional expression (4) defines a preferable range for realizing miniaturization of the lens while suppressing the occurrence of distortion and spherical aberration.
- the first lens group G1 has a positive refractive power and falls below the lower limit of the conditional equation (4), distortion aberration is greatly generated and it becomes difficult to correct the aberration. Further, the light beam near the aperture stop St becomes high, and the aperture diameter becomes large, so that the outer diameter of the lens as a product becomes large, which is not preferable.
- the first length group G1 has a negative refractive power and falls below the lower limit of the conditional equation (4), spherical aberration is greatly generated and it becomes difficult to correct the aberration. Further, the outer diameter of the first negative lens L1 made of a negative meniscus lens becomes large, and the outer diameter of the lens as a product becomes large, which is not preferable.
- the lower limit value of the conditional expression (4) it is preferable to set the lower limit value of the conditional expression (4) to 6.5 because it is possible to reduce the size while further suppressing the occurrence of various aberrations. Further, by setting the lower limit value of the conditional expression (4) to 7.3, it is possible to further reduce the size while suppressing the occurrence of various aberrations, which is more preferable.
- f Focal length of the entire system in the state of focusing at infinity
- BF The distance from the lens surface on the image plane side to the image plane IMG.
- conditional expression (5) If the upper limit of the conditional expression (5) is exceeded, the back focus becomes long, and it becomes difficult to shorten the optical system. Further, if it is less than the lower limit of the conditional expression (5), the distance between the lens surface on the image plane side and the image plane IMG becomes short, which makes it difficult to mechanically design the product.
- the back focus can be shortened and the optical system can be shortened, which is preferable.
- the lower limit value of the conditional expression (5) it becomes easier to secure the distance between the lens surface on the image plane side and the image plane IMG, which is preferable.
- the wide-angle lens according to the embodiment satisfies the following conditional expression (6). 3.0 ⁇ f1
- f1 Focal length of the first lens group G1
- f2 Focal length of the second lens group G2 in a state of focusing at infinity.
- the conditional expression (6) is a conditional expression for appropriately setting the ratio of the refractive powers of the first lens group G1 and the second lens group G2.
- the first lens group G1 plays the role of a wide converter that secures sufficient back focus while increasing the angle of view. By making the incident light beam from the first lens group G1 afocal with respect to the second lens group G2, it is possible to suppress fluctuations in spherical aberration during focusing.
- the lower limit value of the conditional expression (6) is 3.5 because various aberrations such as spherical aberration can be suppressed. Further, by setting the lower limit value of the conditional expression (6) to 4.0, various aberrations such as spherical aberration can be suppressed, which is more preferable.
- FIG. 26 shows an example of a configuration of an image pickup apparatus 100 to which a wide-angle lens according to an embodiment is applied.
- the image pickup device 100 is, for example, a digital still camera, and includes a camera block 10, a camera signal processing unit 20, an image processing unit 30, an LCD (Liquid Crystal Display) 40, and an R / W (reader / writer) 50. , CPU (Central Processing Unit) 60, an input unit 70, and a lens drive control unit 80.
- CPU Central Processing Unit
- the camera block 10 is responsible for an image pickup function, and has an image pickup lens 11 and an image pickup element 12 such as a CCD (Charge Coupled Devices) or a CMOS (Complementary Metal Oxide Semiconductor).
- the image pickup element 12 converts the optical image formed by the image pickup lens 11 into an electric signal, thereby outputting an image pickup signal (image signal) corresponding to the optical image.
- the image pickup lens 11 the wide-angle lenses 1 to 5 according to each configuration example shown in FIG. 1 and the like can be applied.
- the camera signal processing unit 20 performs various signal processing such as analog-to-digital conversion, noise removal, image quality correction, and conversion to a brightness / color difference signal for the image signal output from the image pickup element 12.
- the image processing unit 30 performs recording / reproduction processing of an image signal, and performs compression coding / decompression decoding processing of an image signal based on a predetermined image data format, conversion processing of data specifications such as resolution, and the like. It has become.
- the LCD 40 has a function of displaying various data such as an operation state for the user's input unit 70 and a captured image.
- the R / W 50 writes the image data encoded by the image processing unit 30 to the memory card 1000 and reads out the image data recorded on the memory card 1000.
- the memory card 1000 is, for example, a semiconductor memory that can be attached to and detached from a slot connected to the R / W 50.
- the CPU 60 functions as a control processing unit that controls each circuit block provided in the image pickup apparatus 100, and controls each circuit block based on an instruction input signal or the like from the input unit 70.
- the input unit 70 includes various switches and the like on which a required operation is performed by the user.
- the input unit 70 is composed of, for example, a shutter release button for performing a shutter operation, a selection switch for selecting an operation mode, and the like, and outputs an instruction input signal according to the operation by the user to the CPU 60.
- the lens drive control unit 80 controls the drive of the lens arranged in the camera block 10, and controls a motor (not shown) that drives each lens of the image pickup lens 11 based on a control signal from the CPU 60. It has become.
- the image signal shot in the camera block 10 is output to the LCD 40 via the camera signal processing unit 20 and displayed as a camera-through image under the control of the CPU 60. Further, for example, when an instruction input signal for zooming or focusing is input from the input unit 70, the CPU 60 outputs a control signal to the lens drive control unit 80, and the image pickup lens 11 is controlled by the lens drive control unit 80. The predetermined lens moves.
- the captured image signal is output from the camera signal processing unit 20 to the image processing unit 30 for compression coding processing, and a predetermined image signal is processed. Converted to digital data in data format. The converted data is output to the R / W 50 and written to the memory card 1000.
- the lens drive control unit 80 is based on a control signal from the CPU 60. This is done by moving a predetermined lens of the image pickup lens 11.
- the R / W 50 When reproducing the image data recorded on the memory card 1000, the R / W 50 reads out the predetermined image data from the memory card 1000 in response to the operation on the input unit 70, and the image processing unit 30 decompresses and decodes the predetermined image data. After the processing is performed, the reproduced image signal is output to the LCD 40 and the reproduced image is displayed.
- the image pickup device is applied to a digital still camera or the like, but the application range of the image pickup device is not limited to the digital still camera and is applied to various other image pickup devices. It is possible. For example, it can be applied to a digital single-lens reflex camera, a digital non-reflex camera, a digital video camera, a surveillance camera, and the like. Further, it can be widely applied as a camera unit of a digital input / output device such as a mobile phone having a built-in camera or an information terminal having a built-in camera. It can also be applied to interchangeable lens cameras.
- Si indicates the number of the i-th surface, which is coded so as to gradually increase from the object side.
- Ri indicates the value (mm) of the radius of curvature of the paraxial axis of the i-th plane.
- Di indicates the value (mm) of the distance on the optical axis between the i-th surface and the i + 1-th surface.
- Ndi indicates the value of the refractive index with respect to the d-line (wavelength 587.6 nm) of the material of the optical element having the i-th plane.
- ⁇ di indicates the value of the Abbe number in the d-line of the material of the optical element having the i-th plane.
- the part where the value of "ri” is “ ⁇ ” indicates a plane, a diaphragm surface, or the like.
- ASP in the column of the surface number (Si) indicates that the surface is formed of an aspherical shape.
- STO in the surface number column indicates that the aperture stop St is arranged at the corresponding position.
- OBJ in the column of the surface number indicates that the surface is an object surface (subject surface).
- IMG in the surface number column indicates that the surface is an image surface.
- F indicates the focal length of the entire system (unit: mm).
- “Fno” indicates an open F value (F number).
- ⁇ indicates a half angle of view (unit: °).
- Y indicates the image height (unit: mm).
- L indicates the total optical length (distance on the optical axis from the surface closest to the object to the image plane IMG) (unit: mm).
- some lenses used in each embodiment have a lens surface formed of an aspherical surface.
- the aspherical shape is defined by the following equation.
- "Ei” represents an exponential notation with a base of 10, that is, “10- i ", and for example, "0.12345E-05” is “0.12345E-05". It represents "0.12345 x 10-5 ".
- [Table 1] shows the basic lens data of the wide-angle lens 1 according to the first embodiment shown in FIG.
- [Table 2] shows the values of the focal length f, F value, total angle of view 2 ⁇ , image height Y, and optical total length L of the entire system in the wide-angle lens 1 according to the first embodiment.
- [Table 3] shows the data of the plane spacing that becomes variable during focusing in the wide-angle lens 1 according to the first embodiment.
- [Table 4] shows the values of the coefficients representing the shape of the aspherical surface in the wide-angle lens 1 according to the first embodiment.
- [Table 5] shows the start surface and focal length (unit: mm) of each group of the wide-angle lens 1 according to the first embodiment.
- the wide-angle lens 1 according to the first embodiment has a first negative lens L1 composed of a negative meniscus lens having a convex surface facing the object side on the most object side. Further, four negative lenses (first negative lens L1, second negative lens L2, third negative lens L3, and fourth negative lens L4) are used from the first negative lens L1 to the aperture stop St. Have. Further, the wide-angle lens 1 according to the first embodiment has a first lens group G1 having a negative refractive power, an aperture aperture St, and positive lenses in order from the object side to the image plane side along the optical axis Z1. It is composed of a second lens group G2 having a refractive power.
- the first lens group G1 includes a first negative lens L1, a second negative lens L2, a positive lens E3, a third negative lens L3, a positive lens E5, and a positive lens E6 in order from the object side. It is composed of a fourth negative lens L4.
- the second negative lens L2 has a biconcave shape.
- the positive lens E3 is composed of a positive meniscus lens having a convex surface facing the object side.
- the third negative lens L3 has a biconcave shape.
- the positive lens E5 has a biconvex shape.
- the positive lens E6 is composed of a positive meniscus lens having a convex surface facing the image plane side.
- the fourth negative lens L4 is composed of a negative meniscus lens having a convex surface facing the image plane side.
- the first negative lens L1 is an aspherical lens having an aspherical shape formed on both sides.
- the second negative lens L2 and the positive lens E3 are bonded to each other to form a bonded lens.
- the third negative lens L3 and the positive lens E5 are bonded to each other to form a bonded lens.
- the positive lens E6 and the fourth negative lens L4 are bonded to each other to form a bonded lens.
- the first lens group G1 is composed of seven lenses. If the junction lens is regarded as one lens component, the first lens group G1 is composed of four lens components.
- an air lens La1 having a negative refractive power is formed between the positive lens E3 and the third negative lens L3.
- the second lens group G2 consists of lenses E8 to E14 in order from the object side.
- the lens E8 is a biconvex positive lens.
- the lens E9 is a biconvex positive lens.
- the lens E10 is a negative lens having a biconcave shape.
- the lens E11 is a biconvex positive lens.
- the lens E12 is a negative meniscus lens with a convex surface facing the object side.
- the lens E13 is a negative lens having a biconcave shape.
- the lens E14 is a positive meniscus lens with a convex surface facing the object side.
- the lens E9 and the lens E10 are bonded to each other to form a bonded lens.
- the lens E13 is an aspherical lens having an aspherical shape formed on both sides.
- the second lens group G2 is composed of seven lenses. If the junction lens is regarded as one lens component, the second lens group G2 is composed of six lens components.
- the lens E8 to the lens E13 move in the optical axis direction when focusing from an infinity object to a short-distance object. That is, a part of the lenses of the second lens group G2 is the focus group. However, at the time of focusing, a plurality of lenses in the second lens group G2 may be moved at different movement ratios with different air intervals.
- FIG. 2 shows the longitudinal aberration of the wide-angle lens 1 according to the first embodiment at infinity focusing.
- FIG. 3 shows the longitudinal aberration of the wide-angle lens 1 according to the first embodiment at the time of short-distance focusing.
- FIG. 4 shows the lateral aberration of the wide-angle lens 1 according to the first embodiment at infinity focusing.
- FIG. 5 shows the lateral aberration of the wide-angle lens 1 according to the first embodiment at the time of short-distance focusing.
- FIGS. 2 and 3 show spherical aberration, astigmatism (curvature of field), and distortion as longitudinal aberrations.
- the solid line is the d line (587.56 nm)
- the alternate long and short dash line is the g line (435.84 nm)
- the broken line is the C line (656.27 nm).
- S indicates a value in the sagittal image plane
- T indicates a value in the tangential image plane.
- the distortion diagram shows the values on the d-line.
- the values on the tangential image plane are shown on the left side and the values on the sagittal image plane are shown on the right side. The same applies to the aberration diagrams in the other examples thereafter.
- the wide-angle lens 1 according to the first embodiment has a large aperture of about 1.4 F-number and is downsized by the above configuration. Further, as can be seen from each aberration diagram, the wide-angle lens 1 according to the first embodiment has various aberrations satisfactorily corrected and has excellent imaging performance.
- [Table 6] shows the basic lens data of the wide-angle lens 2 according to the second embodiment shown in FIG.
- [Table 7] shows the values of the focal length f, F value, total angle of view 2 ⁇ , image height Y, and optical total length L of the entire system in the wide-angle lens 2 according to the second embodiment.
- [Table 8] shows the data of the plane spacing which is variable at the time of focusing in the wide-angle lens 2 according to the second embodiment.
- [Table 9] shows the values of the coefficients representing the shape of the aspherical surface in the wide-angle lens 2 according to the second embodiment.
- [Table 10] shows the start surface and the focal length (unit: mm) of each group of the wide-angle lens 2 according to the second embodiment.
- the wide-angle lens 2 according to the second embodiment has a first negative lens L1 composed of a negative meniscus lens having a convex surface facing the object side on the most object side. Further, four negative lenses (first negative lens L1, second negative lens L2, third negative lens L3, and fourth negative lens L4) are used from the first negative lens L1 to the aperture stop St. Have. Further, the wide-angle lens 2 according to the second embodiment has a first lens group G1 having a positive refractive power, an aperture aperture St, and positive lenses in order from the object side to the image plane side along the optical axis Z1. It is composed of a second lens group G2 having a refractive power.
- the first lens group G1 includes a first negative lens L1, a second negative lens L2, a positive lens E3, a third negative lens L3, a positive lens E5, and a positive lens E6 in order from the object side. It is composed of a fourth negative lens L4.
- the second negative lens L2 has a biconcave shape.
- the positive lens E3 is composed of a positive meniscus lens having a convex surface facing the object side.
- the third negative lens L3 has a biconcave shape.
- the positive lens E5 has a biconvex shape.
- the positive lens E6 has a biconvex shape.
- the fourth negative lens L4 is composed of a negative meniscus lens having a convex surface facing the image plane side.
- the first negative lens L1 is an aspherical lens having an aspherical shape formed on both sides.
- the second negative lens L2 and the positive lens E3 are bonded to each other to form a bonded lens.
- the third negative lens L3 and the positive lens E5 are bonded to each other to form a bonded lens.
- the positive lens E6 and the fourth negative lens L4 are bonded to each other to form a bonded lens.
- the first lens group G1 is composed of seven lenses. If the junction lens is regarded as one lens component, the first lens group G1 is composed of four lens components.
- an air lens La1 having a negative refractive power is formed between the positive lens E3 and the third negative lens L3.
- the second lens group G2 is composed of lenses E8 to E13 in order from the object side.
- the lens E8 is a biconvex positive lens.
- the lens E9 is a negative lens having a biconcave shape.
- the lens E10 is a biconvex positive lens.
- the lens E11 is a biconvex positive lens.
- the lens E12 is a negative meniscus lens with a convex surface facing the object side.
- the lens E13 is a negative lens having a biconcave shape.
- the lens E8 and the lens E9 are bonded to each other to form a bonded lens.
- the lens E13 is an aspherical lens having an aspherical shape formed on both sides.
- the second lens group G2 is composed of six lenses. If the junction lens is regarded as one lens component, the second lens group G2 is composed of five lens components.
- the lens E8 to the lens E13 move in the optical axis direction when focusing from an infinity object to a short-distance object. That is, the entire second lens group G2 is regarded as the focus group. However, at the time of focusing, a plurality of lenses in the second lens group G2 may be moved at different movement ratios with different air intervals.
- FIG. 7 shows the longitudinal aberration of the wide-angle lens 2 according to the second embodiment at infinity focusing.
- FIG. 8 shows the longitudinal aberration of the wide-angle lens 2 according to the second embodiment at the time of short-distance focusing.
- FIG. 9 shows the lateral aberration of the wide-angle lens 2 according to the second embodiment at infinity focusing.
- FIG. 10 shows the lateral aberration of the wide-angle lens 2 according to the second embodiment at the time of short-distance focusing.
- the wide-angle lens 2 according to the second embodiment has a large aperture of about 1.4 F-number and is downsized by the above configuration. Further, as can be seen from each aberration diagram, the wide-angle lens 2 according to the second embodiment has various aberrations satisfactorily corrected and has excellent imaging performance.
- [Table 11] shows the basic lens data of the wide-angle lens 3 according to the third embodiment shown in FIG.
- [Table 12] shows the values of the focal length f, F value, total angle of view 2 ⁇ , image height Y, and optical total length L of the entire system in the wide-angle lens 3 according to the third embodiment.
- [Table 13] shows the data of the plane spacing which is variable at the time of focusing in the wide-angle lens 3 according to the third embodiment.
- [Table 14] shows the values of the coefficients representing the shape of the aspherical surface in the wide-angle lens 3 according to the third embodiment.
- [Table 15] shows the start surface and the focal length (unit: mm) of each group of the wide-angle lens 3 according to the third embodiment.
- the wide-angle lens 3 according to the third embodiment has a first negative lens L1 made of a negative meniscus lens having a convex surface facing the object side on the most object side. Further, four negative lenses (first negative lens L1, second negative lens L2, third negative lens L3, and fourth negative lens L4) are used from the first negative lens L1 to the aperture stop St. Have. Further, the wide-angle lens 3 according to the third embodiment has a first lens group G1 having a negative refractive power, an aperture aperture St, and positive lenses in order from the object side to the image plane side along the optical axis Z1. It is composed of a second lens group G2 having a refractive power.
- the first lens group G1 includes a first negative lens L1, a second negative lens L2, a positive lens E3, a third negative lens L3, a positive lens E5, and a positive lens E6 in order from the object side. It is composed of a fourth negative lens L4.
- the second negative lens L2 is composed of a negative meniscus lens with a convex surface facing the object side.
- the positive lens E3 is composed of a positive meniscus lens having a convex surface facing the object side.
- the third negative lens L3 has a biconcave shape.
- the positive lens E5 has a biconvex shape.
- the positive lens E6 has a biconvex shape.
- the fourth negative lens L4 is composed of a negative meniscus lens having a convex surface facing the image plane side.
- the first negative lens L1 is an aspherical lens having an aspherical shape formed on both sides.
- the second negative lens L2 and the positive lens E3 are bonded to each other to form a bonded lens.
- the third negative lens L3 and the positive lens E5 are bonded to each other to form a bonded lens.
- the positive lens E6 and the fourth negative lens L4 are bonded to each other to form a bonded lens.
- the first lens group G1 is composed of seven lenses. If the junction lens is regarded as one lens component, the first lens group G1 is composed of four lens components.
- an air lens La1 having a negative refractive power is formed between the positive lens E3 and the third negative lens L3.
- the second lens group G2 consists of lenses E8 to E14 in order from the object side.
- the lens E8 is a biconvex positive lens.
- the lens E9 is a negative lens having a biconcave shape.
- the lens E10 is a biconvex positive lens.
- the lens E11 is a biconvex positive lens.
- the lens E12 is a negative meniscus lens with a convex surface facing the object side.
- the lens E13 is a negative lens having a biconcave shape.
- the lens E14 is a biconvex positive lens.
- the lens E8 and the lens E9 are bonded to each other to form a bonded lens.
- the lens E13 is an aspherical lens having an aspherical shape formed on both sides.
- the second lens group G2 is composed of seven lenses. If the junction lens is regarded as one lens component, the second lens group G2 is composed of six lens components.
- the lens E8 to the lens E13 move in the optical axis direction when focusing from an infinity object to a short-distance object. That is, a part of the lenses of the second lens group G2 is the focus group.
- a plurality of lenses in the second lens group G2 may be moved at different movement ratios with different air intervals.
- FIG. 12 shows the longitudinal aberration of the wide-angle lens 3 according to the third embodiment at infinity focusing.
- FIG. 13 shows the longitudinal aberration of the wide-angle lens 3 according to the third embodiment at the time of short-distance focusing.
- FIG. 14 shows the lateral aberration of the wide-angle lens 3 according to the third embodiment at infinity focusing.
- FIG. 15 shows the lateral aberration of the wide-angle lens 3 according to the third embodiment at the time of short-distance focusing.
- the wide-angle lens 3 according to the third embodiment has a large aperture of about 1.4 F-number and is downsized by the above configuration. Further, as can be seen from each aberration diagram, the wide-angle lens 3 according to the third embodiment has various aberrations satisfactorily corrected and has excellent imaging performance.
- [Table 16] shows the basic lens data of the wide-angle lens 4 according to the fourth embodiment shown in FIG.
- [Table 17] shows the values of the focal length f, F value, total angle of view 2 ⁇ , image height Y, and optical total length L of the entire system in the wide-angle lens 4 according to the fourth embodiment.
- [Table 18] shows the data of the plane spacing which is variable at the time of focusing in the wide-angle lens 4 according to the fourth embodiment.
- [Table 19] shows the values of the coefficients representing the shape of the aspherical surface in the wide-angle lens 4 according to the fourth embodiment.
- [Table 20] shows the start surface and focal length (unit: mm) of each group of the wide-angle lens 4 according to the fourth embodiment.
- the wide-angle lens 4 according to the fourth embodiment has a first negative lens L1 made of a negative meniscus lens having a convex surface facing the object side on the most object side. Further, five negative lenses (first negative lens L1, second negative lens L2, third negative lens L3, fourth negative lens L4, and first negative lens L1) from the first negative lens L1 to the aperture stop St. It has a negative lens L5) of 5. Further, the wide-angle lens 4 according to the fourth embodiment has a first lens group G1 having a positive refractive power, an aperture aperture St, and positive lenses in order from the object side to the image plane side along the optical axis Z1. It is composed of a second lens group G2 having a refractive power.
- the first lens group G1 includes a first negative lens L1, a second negative lens L2, a third negative lens L3, a positive lens E4, a fourth negative lens L4, and a positive lens in order from the object side. It is composed of E6, a positive lens E7, and a fifth negative lens L5.
- the second negative lens L2 is composed of a negative meniscus lens with a convex surface facing the object side.
- the third negative lens L3 has a biconcave shape.
- the positive lens E4 has a biconvex shape.
- the fourth negative lens L4 is composed of a negative meniscus lens having a convex surface facing the image plane side.
- the positive lens E6 is composed of a positive meniscus lens with a convex surface facing the image plane side.
- the positive lens E7 has a biconvex shape.
- the fifth negative lens L5 is composed of a negative meniscus lens having a convex surface facing the image plane side.
- the first negative lens L1 is an aspherical lens having an aspherical shape formed on both sides.
- the third negative lens L3 and the positive lens E4 are bonded to each other to form a bonded lens.
- the fourth negative lens L4 and the positive lens E6 are bonded to each other to form a bonded lens.
- the positive lens E7 and the fifth negative lens L5 are bonded to each other to form a bonded lens.
- the first lens group G1 is composed of eight lenses. If the junction lens is regarded as one lens component, the first lens group G1 is composed of five lens components.
- an air lens La1 having a negative refractive power is formed between the second negative lens L2 and the third negative lens L3.
- the second lens group G2 consists of lenses E9 to E15 in order from the object side.
- the lens E9 is a biconvex positive lens.
- the lens E10 is a negative lens having a biconcave shape.
- the lens E11 is a biconvex positive lens.
- the lens E12 is a biconvex positive lens.
- the lens E13 comprises a negative meniscus lens with a convex surface facing the object side.
- the lens E14 is a negative lens having a biconcave shape.
- the lens E15 is a biconvex positive lens.
- the lens E9 and the lens E10 are bonded to each other to form a bonded lens.
- the lens E14 is an aspherical lens having an aspherical shape formed on both sides.
- the second lens group G2 is composed of seven lenses. If the junction lens is regarded as one lens component, the second lens group G2 is composed of six lens components.
- the lens E9 and the lens E14 move in the optical axis direction when focusing from an infinity object to a short-distance object. That is, a part of the lenses of the second lens group G2 is the focus group. However, at the time of focusing, a plurality of lenses in the second lens group G2 may be moved at different movement ratios with different air intervals.
- FIG. 17 shows the longitudinal aberration of the wide-angle lens 4 according to the fourth embodiment at infinity focusing.
- FIG. 18 shows the longitudinal aberration of the wide-angle lens 4 according to the fourth embodiment at the time of short-distance focusing.
- FIG. 19 shows the lateral aberration of the wide-angle lens 4 according to the fourth embodiment at infinity focusing.
- FIG. 20 shows the lateral aberration of the wide-angle lens 4 according to the fourth embodiment at the time of short-distance focusing.
- the wide-angle lens 4 according to the fourth embodiment has a large aperture of about 1.8 F-number and is downsized by the above configuration. Further, as can be seen from each aberration diagram, the wide-angle lens 4 according to the fourth embodiment has various aberrations satisfactorily corrected and has excellent imaging performance.
- [Table 21] shows the basic lens data of the wide-angle lens 5 according to the fifth embodiment shown in FIG.
- [Table 22] shows the values of the focal length f, F value, total angle of view 2 ⁇ , image height Y, and optical total length L of the entire system in the wide-angle lens 5 according to the fifth embodiment.
- [Table 23] shows the data of the plane spacing that becomes variable during focusing in the wide-angle lens 5 according to the fifth embodiment.
- [Table 24] shows the values of the coefficients representing the shape of the aspherical surface in the wide-angle lens 5 according to the fifth embodiment.
- [Table 25] shows the start surface and the focal length (unit: mm) of each group of the wide-angle lens 5 according to the fifth embodiment.
- the wide-angle lens 5 according to the fifth embodiment has a first negative lens L1 made of a negative meniscus lens having a convex surface facing the object side on the most object side. Further, four negative lenses (first negative lens L1, second negative lens L2, third negative lens L3, and fourth negative lens L4) are used from the first negative lens L1 to the aperture stop St. Have. Further, the wide-angle lens 5 according to the fifth embodiment has a first lens group G1 having a negative refractive power, an aperture aperture St, and positive lenses in order from the object side to the image plane side along the optical axis Z1. It is composed of a second lens group G2 having a refractive power.
- the first lens group G1 includes a first negative lens L1, a second negative lens L2, a positive lens E3, a third negative lens L3, a positive lens E5, and a positive lens E6 in order from the object side. It is composed of a fourth negative lens L4.
- the second negative lens L2 is composed of a negative meniscus lens with a convex surface facing the object side.
- the positive lens E3 is composed of a positive meniscus lens having a convex surface facing the object side.
- the third negative lens L3 has a biconcave shape.
- the positive lens E5 has a biconvex shape.
- the positive lens E6 has a biconvex shape.
- the fourth negative lens L4 is composed of a negative meniscus lens having a convex surface facing the image plane side.
- the first negative lens L1 is an aspherical lens having an aspherical shape formed on both sides.
- the second negative lens L2 and the positive lens E3 are bonded to each other to form a bonded lens.
- the third negative lens L3 and the positive lens E5 are bonded to each other to form a bonded lens.
- the positive lens E6 and the fourth negative lens L4 are bonded to each other to form a bonded lens.
- the first lens group G1 is composed of seven lenses. If the junction lens is regarded as one lens component, the first lens group G1 is composed of four lens components.
- an air lens La1 having a negative refractive power is formed between the positive lens E3 and the third negative lens L3.
- the second lens group G2 consists of lenses E8 to E14 in order from the object side.
- the lens E8 is a biconvex positive lens.
- the lens E9 is a negative lens having a biconcave shape.
- the lens E10 is a biconvex positive lens.
- the lens E11 is a biconvex positive lens.
- the lens E12 is a negative meniscus lens with a convex surface facing the object side.
- the lens E13 is a negative lens having a biconcave shape.
- the lens E14 is a biconvex positive lens.
- the lens E8 and the lens E9 are bonded to each other to form a bonded lens.
- the lens E13 is an aspherical lens having an aspherical shape formed on both sides.
- the second lens group G2 is composed of seven lenses. If the junction lens is regarded as one lens component, the second lens group G2 is composed of six lens components.
- the lens E8 to the lens E13 move in the optical axis direction when focusing from an infinity object to a short-distance object. That is, a part of the lenses of the second lens group G2 is the focus group. However, at the time of focusing, a plurality of lenses in the second lens group G2 may be moved at different movement ratios with different air intervals.
- FIG. 22 shows the longitudinal aberration of the wide-angle lens 5 according to the fifth embodiment at infinity focusing.
- FIG. 23 shows the longitudinal aberration of the wide-angle lens 5 according to the fifth embodiment at the time of short-distance focusing.
- FIG. 24 shows the lateral aberration of the wide-angle lens 5 according to the fifth embodiment at infinity focusing.
- FIG. 25 shows the lateral aberration of the wide-angle lens 5 according to the fifth embodiment at the time of short-distance focusing.
- the wide-angle lens 5 according to the fifth embodiment has a large aperture of about 1.4 F-number and is downsized by the above configuration. Further, as can be seen from each aberration diagram, the wide-angle lens 5 according to the fifth embodiment has various aberrations satisfactorily corrected and has excellent imaging performance.
- [Other numerical data of each embodiment] [Table 26] shows a summary of the values related to each of the above conditional expressions for each embodiment. As can be seen from [Table 26], the values of each embodiment are within the numerical range for each conditional expression.
- the technology according to the present disclosure can be applied to various products.
- the technology according to the present disclosure is any kind of movement such as an automobile, an electric vehicle, a hybrid electric vehicle, a motorcycle, a bicycle, a personal mobility, an airplane, a drone, a ship, a robot, a construction machine, and an agricultural machine (tractor). It may be realized as a device mounted on the body.
- FIG. 27 is a block diagram showing a schematic configuration example of a vehicle control system 7000, which is an example of a mobile control system to which the technique according to the present disclosure can be applied.
- the vehicle control system 7000 includes a plurality of electronic control units connected via a communication network 7010.
- the vehicle control system 7000 includes a drive system control unit 7100, a body system control unit 7200, a battery control unit 7300, an outside information detection unit 7400, an in-vehicle information detection unit 7500, and an integrated control unit 7600. ..
- the communication network 7010 connecting these plurality of control units conforms to any standard such as CAN (Controller Area Network), LIN (Local Interconnect Network), LAN (Local Area Network) or FlexRay (registered trademark). It may be an in-vehicle communication network.
- CAN Controller Area Network
- LIN Local Interconnect Network
- LAN Local Area Network
- FlexRay registered trademark
- Each control unit includes a microcomputer that performs arithmetic processing according to various programs, a storage unit that stores programs executed by the microcomputer or parameters used for various arithmetic, and a drive circuit that drives various controlled devices. To prepare for.
- Each control unit is provided with a network I / F for communicating with other control units via the communication network 7010, and is connected to devices or sensors inside or outside the vehicle by wired communication or wireless communication.
- a communication I / F for performing communication is provided. In FIG.
- control unit 7600 As the functional configuration of the integrated control unit 7600, the microcomputer 7610, the general-purpose communication I / F7620, the dedicated communication I / F7630, the positioning unit 7640, the beacon receiving unit 7650, the in-vehicle device I / F7660, the audio image output unit 7670, The vehicle-mounted network I / F 7680 and the storage unit 7690 are illustrated.
- Other control units also include a microcomputer, a communication I / F, a storage unit, and the like.
- the drive system control unit 7100 controls the operation of the device related to the drive system of the vehicle according to various programs.
- the drive system control unit 7100 has a driving force generator for generating the driving force of the vehicle such as an internal combustion engine or a driving motor, a driving force transmission mechanism for transmitting the driving force to the wheels, and a steering angle of the vehicle. It functions as a control device such as a steering mechanism for adjusting and a braking device for generating braking force of the vehicle.
- the drive system control unit 7100 may have a function as a control device such as ABS (Antilock Brake System) or ESC (Electronic Stability Control).
- the vehicle state detection unit 7110 is connected to the drive system control unit 7100.
- the vehicle state detection unit 7110 may include, for example, a gyro sensor that detects the angular velocity of the axial rotation motion of the vehicle body, an acceleration sensor that detects the acceleration of the vehicle, an accelerator pedal operation amount, a brake pedal operation amount, or steering wheel steering. It includes at least one of sensors for detecting an angle, engine speed, wheel speed, and the like.
- the drive system control unit 7100 performs arithmetic processing using a signal input from the vehicle state detection unit 7110, and controls an internal combustion engine, a drive motor, an electric power steering device, a brake device, and the like.
- the body system control unit 7200 controls the operation of various devices mounted on the vehicle body according to various programs.
- the body system control unit 7200 functions as a keyless entry system, a smart key system, a power window device, or a control device for various lamps such as headlamps, back lamps, brake lamps, turn signals or fog lamps.
- a radio wave transmitted from a portable device that substitutes for a key or signals of various switches may be input to the body system control unit 7200.
- the body system control unit 7200 receives inputs of these radio waves or signals and controls a vehicle door lock device, a power window device, a lamp, and the like.
- the battery control unit 7300 controls the secondary battery 7310, which is the power supply source of the drive motor, according to various programs. For example, information such as the battery temperature, the battery output voltage, or the remaining capacity of the battery is input to the battery control unit 7300 from the battery device including the secondary battery 7310. The battery control unit 7300 performs arithmetic processing using these signals, and controls the temperature control of the secondary battery 7310 or the cooling device provided in the battery device.
- the vehicle outside information detection unit 7400 detects information outside the vehicle equipped with the vehicle control system 7000.
- the image pickup unit 7410 and the vehicle exterior information detection unit 7420 is connected to the vehicle exterior information detection unit 7400.
- the image pickup unit 7410 includes at least one of a ToF (TimeOfFlight) camera, a stereo camera, a monocular camera, an infrared camera, and other cameras.
- the vehicle outside information detection unit 7420 is used, for example, to detect the current weather or an environment sensor for detecting the weather, or other vehicles, obstacles, pedestrians, etc. around the vehicle equipped with the vehicle control system 7000. At least one of the ambient information detection sensors is included.
- the environment sensor may be, for example, at least one of a raindrop sensor that detects rainy weather, a fog sensor that detects fog, a sunshine sensor that detects the degree of sunshine, and a snow sensor that detects snowfall.
- the ambient information detection sensor may be at least one of an ultrasonic sensor, a radar device, and a LIDAR (Light Detection and Ringing, Laser Imaging Detection and Ringing) device.
- the image pickup unit 7410 and the vehicle exterior information detection unit 7420 may be provided as independent sensors or devices, or may be provided as a device in which a plurality of sensors or devices are integrated.
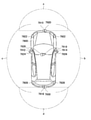
- FIG. 28 shows an example of the installation position of the image pickup unit 7410 and the vehicle exterior information detection unit 7420.
- the image pickup unit 7910, 7912, 7914, 7916, 7918 are provided, for example, at at least one of the front nose, side mirror, rear bumper, back door, and upper part of the windshield of the vehicle interior of the vehicle 7900.
- the image pickup unit 7910 provided in the front nose and the image pickup section 7918 provided in the upper part of the windshield in the vehicle interior mainly acquire an image in front of the vehicle 7900.
- the image pickup units 7912 and 7914 provided in the side mirrors mainly acquire images of the side of the vehicle 7900.
- the image pickup unit 7916 provided in the rear bumper or the back door mainly acquires an image of the rear of the vehicle 7900.
- the image pickup unit 7918 provided on the upper part of the windshield in the vehicle interior is mainly used for detecting a preceding vehicle, a pedestrian, an obstacle, a traffic light, a traffic sign, a lane, or the like.
- FIG. 28 shows an example of the shooting range of each of the imaging units 7910, 7912, 7914, 7916.
- the imaging range a indicates the imaging range of the imaging unit 7910 provided on the front nose
- the imaging ranges b and c indicate the imaging range of the imaging units 7912 and 7914 provided on the side mirrors, respectively
- the imaging range d indicates the imaging range d.
- the imaging range of the imaging unit 7916 provided on the rear bumper or the back door is shown. For example, by superimposing the image data captured by the image pickup units 7910, 7912, 7914, 7916, a bird's-eye view image of the vehicle 7900 can be obtained.
- the vehicle exterior information detection unit 7920, 7922, 7924, 7926, 7928, 7930 provided at the front, rear, side, corner and the upper part of the windshield of the vehicle interior of the vehicle 7900 may be, for example, an ultrasonic sensor or a radar device.
- the vehicle exterior information detection units 7920, 7926, 7930 provided on the front nose, rear bumper, back door, and upper part of the windshield in the vehicle interior of the vehicle 7900 may be, for example, a lidar device.
- These out-of-vehicle information detection units 7920 to 7930 are mainly used for detecting a preceding vehicle, a pedestrian, an obstacle, or the like.
- the vehicle outside information detection unit 7400 causes the image pickup unit 7410 to capture an image of the outside of the vehicle and receives the captured image data. Further, the vehicle exterior information detection unit 7400 receives detection information from the connected vehicle exterior information detection unit 7420. When the vehicle exterior information detection unit 7420 is an ultrasonic sensor, a radar device, or a lidar device, the vehicle exterior information detection unit 7400 transmits ultrasonic waves, electromagnetic waves, or the like, and receives received reflected wave information.
- the out-of-vehicle information detection unit 7400 may perform object detection processing or distance detection processing such as a person, a vehicle, an obstacle, a sign, or a character on a road surface based on the received information.
- the out-of-vehicle information detection unit 7400 may perform an environment recognition process for recognizing rainfall, fog, road surface conditions, etc. based on the received information.
- the out-of-vehicle information detection unit 7400 may calculate the distance to an object outside the vehicle based on the received information.
- the vehicle outside information detection unit 7400 may perform image recognition processing or distance detection processing for recognizing a person, a vehicle, an obstacle, a sign, a character on the road surface, or the like based on the received image data.
- the vehicle exterior information detection unit 7400 performs processing such as distortion correction or alignment on the received image data, and synthesizes image data captured by different image pickup units 7410 to generate a bird's-eye view image or a panoramic image. May be good.
- the vehicle exterior information detection unit 7400 may perform the viewpoint conversion process using the image data captured by different image pickup units 7410.
- the in-vehicle information detection unit 7500 detects the in-vehicle information.
- a driver state detection unit 7510 that detects the state of the driver is connected to the in-vehicle information detection unit 7500.
- the driver state detection unit 7510 may include a camera that captures the driver, a biosensor that detects the driver's biological information, a microphone that collects sound in the vehicle interior, and the like.
- the biosensor is provided on, for example, on the seat surface or the steering wheel, and detects the biometric information of the passenger sitting on the seat or the driver holding the steering wheel.
- the in-vehicle information detection unit 7500 may calculate the degree of fatigue or concentration of the driver based on the detection information input from the driver state detection unit 7510, and may determine whether the driver is asleep. You may.
- the in-vehicle information detection unit 7500 may perform processing such as noise canceling processing on the collected audio signal.
- the integrated control unit 7600 controls the overall operation in the vehicle control system 7000 according to various programs.
- An input unit 7800 is connected to the integrated control unit 7600.
- the input unit 7800 is realized by a device that can be input-operated by the occupant, such as a touch panel, a button, a microphone, a switch, or a lever. Data obtained by recognizing the voice input by the microphone may be input to the integrated control unit 7600.
- the input unit 7800 may be, for example, a remote control device using infrared rays or other radio waves, or an external connection device such as a mobile phone or a PDA (Personal Digital Assistant) corresponding to the operation of the vehicle control system 7000. You may.
- the input unit 7800 may be, for example, a camera, in which case the passenger can input information by gesture. Alternatively, data obtained by detecting the movement of the wearable device worn by the passenger may be input. Further, the input unit 7800 may include, for example, an input control circuit that generates an input signal based on the information input by the passenger or the like using the above input unit 7800 and outputs the input signal to the integrated control unit 7600. By operating the input unit 7800, the passenger or the like inputs various data to the vehicle control system 7000 and instructs the processing operation.
- the storage unit 7690 may include a ROM (Read Only Memory) for storing various programs executed by the microcomputer, and a RAM (Random Access Memory) for storing various parameters, calculation results, sensor values, and the like. Further, the storage unit 7690 may be realized by a magnetic storage device such as an HDD (Hard Disc Drive), a semiconductor storage device, an optical storage device, an optical magnetic storage device, or the like.
- ROM Read Only Memory
- RAM Random Access Memory
- the general-purpose communication I / F 7620 is a general-purpose communication I / F that mediates communication with various devices existing in the external environment 7750.
- General-purpose communication I / F7620 is a cellular communication protocol such as GSM (registered trademark) (Global System of Mobile communications), WiMAX (registered trademark), LTE (registered trademark) (Long Term Evolution) or LTE-A (LTE-Advanced).
- GSM Global System of Mobile communications
- WiMAX registered trademark
- LTE registered trademark
- LTE-A Long Term Evolution-Advanced
- Bluetooth® may be implemented.
- the general-purpose communication I / F7620 connects to a device (for example, an application server or a control server) existing on an external network (for example, the Internet, a cloud network, or a business-specific network) via a base station or an access point, for example. You may. Further, the general-purpose communication I / F7620 uses, for example, P2P (Peer To Peer) technology to provide a terminal existing in the vicinity of the vehicle (for example, a driver, a pedestrian or a store terminal, or an MTC (Machine Type Communication) terminal). May be connected with.
- P2P Peer To Peer
- MTC Machine Type Communication
- the dedicated communication I / F 7630 is a communication I / F that supports a communication protocol formulated for use in a vehicle.
- the dedicated communication I / F7630 uses a standard protocol such as WAVE (Wireless Access in Vehicle Environment), DSRC (Dedicated Short Range Communications), which is a combination of IEEE802.11p in the lower layer and IEEE1609 in the upper layer, or a cellular communication protocol. May be implemented.
- Dedicated communication I / F7630 is typically vehicle-to-vehicle (Vehicle to Vehicle) communication, road-to-vehicle (Vehicle to Infrastructure) communication, vehicle-to-home (Vehicle to Home) communication, and pedestrian-to-vehicle (Vehicle to Pedestrian) communication. ) Carry out V2X communication, a concept that includes one or more of the communications.
- the positioning unit 7640 receives, for example, a GNSS signal from a GNSS (Global Navigation Satellite System) satellite (for example, a GPS signal from a GPS (Global Positioning System) satellite) and executes positioning, and performs positioning, and the latitude, longitude, and altitude of the vehicle. Generate location information including.
- the positioning unit 7640 may specify the current position by exchanging signals with the wireless access point, or may acquire position information from a terminal such as a mobile phone, PHS, or smartphone having a positioning function.
- the beacon receiving unit 7650 receives, for example, a radio wave or an electromagnetic wave transmitted from a radio station or the like installed on a road, and acquires information such as a current position, a traffic jam, a road closure, or a required time.
- the function of the beacon receiving unit 7650 may be included in the above-mentioned dedicated communication I / F 7630.
- the in-vehicle device I / F 7660 is a communication interface that mediates the connection between the microcomputer 7610 and various in-vehicle devices 7760 existing in the vehicle.
- the in-vehicle device I / F7660 may establish a wireless connection using a wireless communication protocol such as wireless LAN, Bluetooth (registered trademark), NFC (Near Field Communication) or WUSB (Wireless USB).
- a wireless communication protocol such as wireless LAN, Bluetooth (registered trademark), NFC (Near Field Communication) or WUSB (Wireless USB).
- the in-vehicle device I / F7660 can be connected to USB (Universal Serial Bus), HDMI (registered trademark) (High-Definition Multimedia Interface), or MHL (Mobile) via a connection terminal (and a cable if necessary) (not shown).
- a wired connection such as High-definition Link may be established.
- the in-vehicle device 7760 may include, for example, at least one of a passenger's mobile device or wearable device, or information device carried in or attached to the vehicle. Further, the in-vehicle device 7760 may include a navigation device that searches for a route to an arbitrary destination.
- the in-vehicle device I / F 7660 exchanges control signals or data signals with these in-vehicle devices 7760.
- the in-vehicle network I / F7680 is an interface that mediates communication between the microcomputer 7610 and the communication network 7010.
- the vehicle-mounted network I / F7680 transmits / receives signals and the like according to a predetermined protocol supported by the communication network 7010.
- the microcomputer 7610 of the integrated control unit 7600 is via at least one of general-purpose communication I / F7620, dedicated communication I / F7630, positioning unit 7640, beacon receiving unit 7650, in-vehicle device I / F7660, and in-vehicle network I / F7680.
- the vehicle control system 7000 is controlled according to various programs based on the information acquired. For example, the microcomputer 7610 calculates the control target value of the driving force generator, the steering mechanism, or the braking device based on the acquired information inside and outside the vehicle, and outputs a control command to the drive system control unit 7100. May be good.
- the microcomputer 7610 realizes ADAS (Advanced Driver Assistance System) functions including vehicle collision avoidance or impact mitigation, follow-up driving based on inter-vehicle distance, vehicle speed maintenance driving, vehicle collision warning, vehicle lane deviation warning, and the like. Cooperative control may be performed for the purpose of.
- the microcomputer 7610 automatically travels autonomously without relying on the driver's operation by controlling the driving force generator, steering mechanism, braking device, etc. based on the acquired information on the surroundings of the vehicle. Coordinated control may be performed for the purpose of driving or the like.
- the microcomputer 7610 has information acquired via at least one of a general-purpose communication I / F7620, a dedicated communication I / F7630, a positioning unit 7640, a beacon receiving unit 7650, an in-vehicle device I / F7660, and an in-vehicle network I / F7680. Based on the above, three-dimensional distance information between the vehicle and an object such as a surrounding structure or a person may be generated, and local map information including the peripheral information of the current position of the vehicle may be created. Further, the microcomputer 7610 may predict the danger of a vehicle collision, a pedestrian or the like approaching or entering a closed road, and generate a warning signal based on the acquired information.
- the warning signal may be, for example, a signal for generating a warning sound or lighting a warning lamp.
- the audio image output unit 7670 transmits an output signal of at least one of audio and image to an output device capable of visually or audibly notifying information to the passenger or the outside of the vehicle.
- an audio speaker 7710, a display unit 7720, and an instrument panel 7730 are exemplified as output devices.
- the display unit 7720 may include, for example, at least one of an onboard display and a head-up display.
- the display unit 7720 may have an AR (Augmented Reality) display function.
- the output device may be other devices such as headphones, wearable devices such as eyeglass-type displays worn by passengers, projectors or lamps other than these devices.
- the display device displays the results obtained by various processes performed by the microcomputer 7610 or the information received from other control units in various formats such as texts, images, tables, and graphs. Display visually.
- the audio output device converts an audio signal composed of reproduced audio data, acoustic data, or the like into an analog signal and outputs the audio signal audibly.
- At least two control units connected via the communication network 7010 may be integrated as one control unit.
- each control unit may be composed of a plurality of control units.
- the vehicle control system 7000 may include another control unit (not shown).
- the other control unit may have a part or all of the functions carried out by any of the control units. That is, as long as information is transmitted and received via the communication network 7010, predetermined arithmetic processing may be performed by any of the control units.
- a sensor or device connected to any control unit may be connected to another control unit, and a plurality of control units may send and receive detection information to and from each other via the communication network 7010. .
- the wide-angle lens and the image pickup apparatus of the present disclosure can be applied to the image pickup unit 7410 and the image pickup unit 7910, 7912, 7914, 7916, 7918.
- the technique according to the present disclosure may be applied to an endoscopic surgery system.
- FIG. 29 is a diagram showing an example of a schematic configuration of an endoscopic surgery system 5000 to which the technique according to the present disclosure can be applied.
- FIG. 29 illustrates a surgeon (doctor) 5067 performing surgery on patient 5071 on patient bed 5069 using the endoscopic surgery system 5000.
- the endoscopic surgery system 5000 includes an endoscope 5001, other surgical tools 5017, a support arm device 5027 for supporting the endoscope 5001, and various devices for endoscopic surgery. It is composed of a cart 5037 and a cart 5037.
- trocca 5025a to 5025d In endoscopic surgery, instead of cutting the abdominal wall to open the abdomen, multiple tubular opening devices called trocca 5025a to 5025d are punctured into the abdominal wall. Then, from the trocca 5025a to 5025d, the lens barrel 5003 of the endoscope 5001 and other surgical tools 5017 are inserted into the body cavity of the patient 5071.
- other surgical tools 5017 a pneumoperitoneum tube 5019, an energy treatment tool 5021 and forceps 5023 are inserted into the body cavity of patient 5071.
- the energy treatment tool 5021 is a treatment tool for incising and peeling a tissue, sealing a blood vessel, or the like by using a high frequency current or ultrasonic vibration.
- the surgical tool 5017 shown is only an example, and as the surgical tool 5017, various surgical tools generally used in endoscopic surgery such as a sword and a retractor may be used.
- the image of the surgical site in the body cavity of the patient 5071 taken by the endoscope 5001 is displayed on the display device 5041.
- the surgeon 5067 performs a procedure such as excising the affected area by using the energy treatment tool 5021 or the forceps 5023 while viewing the image of the surgical site displayed on the display device 5041 in real time.
- the pneumoperitoneum tube 5019, the energy treatment tool 5021, and the forceps 5023 are supported by the operator 5067, an assistant, or the like during the operation.
- the support arm device 5027 includes an arm portion 5031 extending from the base portion 5029.
- the arm portion 5031 is composed of joint portions 5033a, 5033b, 5033c, and links 5035a, 5035b, and is driven by control from the arm control device 5045.
- the endoscope 5001 is supported by the arm portion 5031, and its position and posture are controlled. Thereby, the stable position fixing of the endoscope 5001 can be realized.
- the endoscope 5001 is composed of a lens barrel 5003 in which a region having a predetermined length from the tip is inserted into the body cavity of the patient 5071, and a camera head 5005 connected to the base end of the lens barrel 5003.
- the endoscope 5001 configured as a so-called rigid mirror having a rigid barrel 5003 is illustrated, but the endoscope 5001 is configured as a so-called flexible mirror having a flexible barrel 5003. May be good.
- An opening in which an objective lens is fitted is provided at the tip of the lens barrel 5003.
- a light source device 5043 is connected to the endoscope 5001, and the light generated by the light source device 5043 is guided to the tip of the lens barrel by a light guide extending inside the lens barrel 5003, and is an objective. It is irradiated toward the observation target in the body cavity of the patient 5071 through the lens.
- the endoscope 5001 may be a direct endoscope, a perspective mirror, or a side endoscope.
- An optical system and an image pickup element are provided inside the camera head 5005, and the reflected light (observation light) from the observation target is focused on the image pickup element by the optical system.
- the observation light is photoelectrically converted by the image pickup device, and an electric signal corresponding to the observation light, that is, an image signal corresponding to the observation image is generated.
- the image signal is transmitted to the camera control unit (CCU: Camera Control Unit) 5039 as RAW data.
- the camera head 5005 is equipped with a function of adjusting the magnification and the focal length by appropriately driving the optical system thereof.
- the camera head 5005 may be provided with a plurality of image pickup elements.
- a plurality of relay optical systems are provided inside the lens barrel 5003 in order to guide the observation light to each of the plurality of image pickup elements.
- the CCU 5039 is composed of a CPU (Central Processing Unit), a GPU (Graphics Processing Unit), and the like, and comprehensively controls the operations of the endoscope 5001 and the display device 5041. Specifically, the CCU 5039 performs various image processing for displaying an image based on the image signal, such as a development process (demosaic process), on the image signal received from the camera head 5005. The CCU 5039 provides the image signal subjected to the image processing to the display device 5041. Further, the CCU 5039 transmits a control signal to the camera head 5005 and controls the driving thereof.
- the control signal may include information about imaging conditions such as magnification and focal length.
- the display device 5041 displays an image based on the image signal processed by the CCU 5039 under the control of the CCU 5039.
- the endoscope 5001 is compatible with high-resolution shooting such as 4K (horizontal pixel number 3840 x vertical pixel number 2160) or 8K (horizontal pixel number 7680 x vertical pixel number 4320), and / or 3D display.
- the display device 5041 a display device capable of displaying a high resolution and / or a device capable of displaying in 3D can be used.
- a display device 5041 having a size of 55 inches or more is used for high-resolution shooting such as 4K or 8K, a further immersive feeling can be obtained.
- a plurality of display devices 5041 having different resolutions and sizes may be provided depending on the application.
- the light source device 5043 is composed of, for example, a light source such as an LED (light emission diode), and supplies irradiation light for photographing the surgical site to the endoscope 5001.
- a light source such as an LED (light emission diode)
- the arm control device 5045 is configured by a processor such as a CPU, and operates according to a predetermined program to control the drive of the arm portion 5031 of the support arm device 5027 according to a predetermined control method.
- the input device 5047 is an input interface for the endoscopic surgery system 5000.
- the user can input various information and input instructions to the endoscopic surgery system 5000 via the input device 5047.
- the user inputs various information related to the surgery, such as physical information of the patient and information about the surgical procedure, via the input device 5047.
- the user is instructed to drive the arm portion 5031 via the input device 5047, or is instructed to change the imaging conditions (type of irradiation light, magnification, focal length, etc.) by the endoscope 5001. , Instructions to drive the energy treatment tool 5021, etc. are input.
- the type of the input device 5047 is not limited, and the input device 5047 may be various known input devices.
- the input device 5047 for example, a mouse, a keyboard, a touch panel, a switch, a foot switch 5057 and / or a lever and the like can be applied.
- the touch panel may be provided on the display surface of the display device 5041.
- the input device 5047 is a device worn by the user, such as a glasses-type wearable device or an HMD (Head Mounted Display), and various inputs are made according to the user's gesture and line of sight detected by these devices. Is done. Further, the input device 5047 includes a camera capable of detecting the movement of the user, and various inputs are performed according to the gesture and the line of sight of the user detected from the image captured by the camera. Further, the input device 5047 includes a microphone capable of picking up the voice of the user, and various inputs are performed by voice via the microphone.
- a glasses-type wearable device or an HMD Head Mounted Display
- the input device 5047 is configured to be able to input various information in a non-contact manner, so that a user who belongs to a clean area (for example, an operator 5067) can operate a device belonging to the unclean area in a non-contact manner. Is possible. In addition, the user can operate the device without taking his / her hand off the surgical tool that he / she has, which improves the convenience of the user.
- a clean area for example, an operator 5067
- the treatment tool control device 5049 controls the drive of the energy treatment tool 5021 for cauterizing tissue, incising, sealing a blood vessel, or the like.
- the pneumoperitoneum device 5051 gas in the body cavity through the pneumoperitoneum tube 5019 in order to inflate the body cavity of the patient 5071 for the purpose of securing the field of view by the endoscope 5001 and securing the work space of the operator. Is sent.
- the recorder 5053 is a device capable of recording various information related to surgery.
- the printer 5055 is a device capable of printing various information related to surgery in various formats such as text, images, and graphs.
- the support arm device 5027 includes a base portion 5029 as a base and an arm portion 5031 extending from the base portion 5029.
- the arm portion 5031 is composed of a plurality of joint portions 5033a, 5033b, 5033c and a plurality of links 5035a, 5035b connected by the joint portions 5033b, but in FIG. 29, for the sake of simplicity.
- the configuration of the arm portion 5031 is simplified and shown. Actually, the shapes, numbers and arrangements of the joint portions 5033a to 5033c and the links 5035a and 5035b, the direction of the rotation axis of the joint portions 5033a to 5033c, and the like are appropriately set so that the arm portion 5031 has a desired degree of freedom. obtain.
- the arm portion 5031 may be preferably configured to have more than 6 degrees of freedom.
- the endoscope 5001 can be freely moved within the movable range of the arm portion 5031, so that the lens barrel 5003 of the endoscope 5001 can be inserted into the body cavity of the patient 5071 from a desired direction. It will be possible.
- Actuators are provided in the joint portions 5033a to 5033c, and the joint portions 5033a to 5033c are configured to be rotatable around a predetermined rotation axis by driving the actuator.
- the arm control device 5045 By controlling the drive of the actuator by the arm control device 5045, the rotation angles of the joint portions 5033a to 5033c are controlled, and the drive of the arm portion 5031 is controlled. Thereby, control of the position and posture of the endoscope 5001 can be realized.
- the arm control device 5045 can control the drive of the arm unit 5031 by various known control methods such as force control or position control.
- the drive of the arm unit 5031 is appropriately controlled by the arm control device 5045 according to the operation input.
- the position and orientation of the endoscope 5001 may be controlled.
- the endoscope 5001 at the tip of the arm portion 5031 can be moved from an arbitrary position to an arbitrary position, and then fixedly supported at the moved position.
- the arm portion 5031 may be operated by a so-called master slave method. In this case, the arm portion 5031 can be remotely controlled by the user via an input device 5047 installed at a location away from the operating room.
- the arm control device 5045 When force control is applied, the arm control device 5045 receives an external force from the user, and the actuators of the joint portions 5033a to 5033c are arranged so that the arm portion 5031 moves smoothly according to the external force. So-called power assist control for driving may be performed.
- the arm portion 5031 when the user moves the arm portion 5031 while directly touching the arm portion 5031, the arm portion 5031 can be moved with a relatively light force. Therefore, the endoscope 5001 can be moved more intuitively and with a simpler operation, and the convenience of the user can be improved.
- the endoscope 5001 was supported by a doctor called a scopist.
- the support arm device 5027 by using the support arm device 5027, the position of the endoscope 5001 can be more reliably fixed without human intervention, so that an image of the surgical site can be stably obtained. , It becomes possible to perform surgery smoothly.
- the arm control device 5045 does not necessarily have to be provided on the cart 5037. Further, the arm control device 5045 does not necessarily have to be one device. For example, the arm control device 5045 may be provided at each joint portion 5033a to 5033c of the arm portion 5031 of the support arm device 5027, and the arm portion 5031 is driven by the plurality of arm control devices 5045 cooperating with each other. Control may be realized.
- the light source device 5043 supplies the endoscope 5001 with irradiation light for photographing the surgical site.
- the light source device 5043 is composed of, for example, an LED, a laser light source, or a white light source composed of a combination thereof.
- the white light source is configured by the combination of the RGB laser light sources, the output intensity and the output timing of each color (each wavelength) can be controlled with high accuracy. Therefore, the white balance of the captured image in the light source device 5043 can be controlled. Can be adjusted.
- the observation target is irradiated with the laser light from each of the RGB laser light sources in a time-division manner, and the driving of the image sensor of the camera head 5005 is controlled in synchronization with the irradiation timing to correspond to each of RGB. It is also possible to capture the image in a time-division manner. According to this method, a color image can be obtained without providing a color filter in the image pickup device.
- the drive of the light source device 5043 may be controlled so as to change the intensity of the output light at predetermined time intervals.
- the drive of the image sensor of the camera head 5005 in synchronization with the timing of the change of the light intensity to acquire an image in time division and synthesizing the image, so-called high dynamic without blackout and overexposure. Range images can be generated.
- the light source device 5043 may be configured to be able to supply light in a predetermined wavelength band corresponding to special light observation.
- special light observation for example, by utilizing the wavelength dependence of light absorption in body tissue, the surface layer of the mucous membrane is irradiated with light in a narrower band than the irradiation light (that is, white light) during normal observation.
- narrow band imaging in which a predetermined tissue such as a blood vessel is photographed with high contrast, is performed.
- fluorescence observation may be performed in which an image is obtained by fluorescence generated by irradiating with excitation light.
- the body tissue is irradiated with excitation light to observe the fluorescence from the body tissue (autofluorescence observation), or a reagent such as indocyanine green (ICG) is locally injected into the body tissue and the body tissue is injected.
- An excitation light corresponding to the fluorescence wavelength of the reagent may be irradiated to obtain a fluorescence image.
- the light source device 5043 may be configured to be capable of supplying narrowband light and / or excitation light corresponding to such special light observation.
- FIG. 30 is a block diagram showing an example of the functional configuration of the camera head 5005 and CCU5039 shown in FIG. 29.
- the camera head 5005 has a lens unit 5007, an image pickup unit 5009, a drive unit 5011, a communication unit 5013, and a camera head control unit 5015 as its functions.
- the CCU 5039 has a communication unit 5059, an image processing unit 5061, and a control unit 5063 as its functions.
- the camera head 5005 and the CCU 5039 are bidirectionally connected by a transmission cable 5065 so as to be communicable.
- the lens unit 5007 is an optical system provided at a connection portion with the lens barrel 5003.
- the observation light taken in from the tip of the lens barrel 5003 is guided to the camera head 5005 and incident on the lens unit 5007.
- the lens unit 5007 is configured by combining a plurality of lenses including a zoom lens and a focus lens.
- the optical characteristics of the lens unit 5007 are adjusted so as to collect the observation light on the light receiving surface of the image pickup element of the image pickup unit 5009.
- the zoom lens and the focus lens are configured so that their positions on the optical axis can be moved in order to adjust the magnification and the focus of the captured image.
- the image pickup unit 5009 is composed of an image pickup element and is arranged after the lens unit 5007.
- the observation light that has passed through the lens unit 5007 is focused on the light receiving surface of the image pickup device, and an image signal corresponding to the observation image is generated by photoelectric conversion.
- the image signal generated by the image pickup unit 5009 is provided to the communication unit 5013.
- CMOS Complementary Metal Oxide Semiconductor
- image pickup device for example, an image pickup device capable of capturing a high-resolution image of 4K or higher may be used.
- the image pickup elements constituting the image pickup unit 5009 are configured to have a pair of image pickup elements for acquiring image signals for the right eye and the left eye corresponding to 3D display, respectively.
- the 3D display enables the surgeon 5067 to more accurately grasp the depth of the living tissue in the surgical site.
- the image pickup unit 5009 is composed of a multi-plate type, a plurality of lens units 5007 are also provided corresponding to each image pickup element.
- the image pickup unit 5009 does not necessarily have to be provided on the camera head 5005.
- the image pickup unit 5009 may be provided inside the lens barrel 5003 immediately after the objective lens.
- the drive unit 5011 is composed of an actuator, and the zoom lens and the focus lens of the lens unit 5007 are moved by a predetermined distance along the optical axis under the control of the camera head control unit 5015. As a result, the magnification and focus of the image captured by the image pickup unit 5009 can be adjusted as appropriate.
- the communication unit 5013 is composed of a communication device for transmitting and receiving various information to and from the CCU 5039.
- the communication unit 5013 transmits the image signal obtained from the image pickup unit 5009 as RAW data to the CCU 5039 via the transmission cable 5065.
- the image signal is transmitted by optical communication.
- the surgeon 5067 performs the surgery while observing the condition of the affected area with the captured image, so for safer and more reliable surgery, the moving image of the surgical site is displayed in real time as much as possible. This is because it is required.
- the communication unit 5013 is provided with a photoelectric conversion module that converts an electric signal into an optical signal.
- the image signal is converted into an optical signal by the photoelectric conversion module, and then transmitted to the CCU 5039 via the transmission cable 5065.
- the communication unit 5013 receives a control signal for controlling the drive of the camera head 5005 from the CCU 5039.
- the control signal includes, for example, information to specify the frame rate of the captured image, information to specify the exposure value at the time of imaging, and / or information to specify the magnification and focus of the captured image. Contains information about the condition.
- the communication unit 5013 provides the received control signal to the camera head control unit 5015.
- the control signal from the CCU 5039 may also be transmitted by optical communication.
- the communication unit 5013 is provided with a photoelectric conversion module that converts an optical signal into an electric signal, and the control signal is converted into an electric signal by the photoelectric conversion module and then provided to the camera head control unit 5015.
- the image pickup conditions such as the frame rate, the exposure value, the magnification, and the focal point are automatically set by the control unit 5063 of the CCU 5039 based on the acquired image signal. That is, the so-called AE (Auto Exposure) function, AF (Auto Focus) function, and AWB (Auto White Balance) function are mounted on the endoscope 5001.
- the camera head control unit 5015 controls the drive of the camera head 5005 based on the control signal from the CCU 5039 received via the communication unit 5013. For example, the camera head control unit 5015 controls the drive of the image pickup element of the image pickup unit 5009 based on the information to specify the frame rate of the image pickup image and / or the information to specify the exposure at the time of image pickup. Further, for example, the camera head control unit 5015 appropriately moves the zoom lens and the focus lens of the lens unit 5007 via the drive unit 5011 based on the information that the magnification and the focus of the captured image are specified.
- the camera head control unit 5015 may further have a function of storing information for identifying the lens barrel 5003 and the camera head 5005.
- the camera head 5005 can be made resistant to autoclave sterilization.
- the communication unit 5059 is configured by a communication device for transmitting and receiving various information to and from the camera head 5005.
- the communication unit 5059 receives an image signal transmitted from the camera head 5005 via the transmission cable 5065.
- the image signal can be suitably transmitted by optical communication.
- the communication unit 5059 is provided with a photoelectric conversion module that converts an optical signal into an electric signal.
- the communication unit 5059 provides the image processing unit 5061 with an image signal converted into an electric signal.
- the communication unit 5059 transmits a control signal for controlling the drive of the camera head 5005 to the camera head 5005.
- the control signal may also be transmitted by optical communication.
- the image processing unit 5061 performs various image processing on the image signal which is the RAW data transmitted from the camera head 5005.
- the image processing includes, for example, development processing, high image quality processing (band enhancement processing, super-resolution processing, NR (Noise reduction) processing and / or camera shake correction processing, etc.), and / or enlargement processing (electronic zoom processing). Etc., various known signal processing is included. Further, the image processing unit 5061 performs detection processing on the image signal for performing AE, AF and AWB.
- the image processing unit 5061 is composed of a processor such as a CPU or GPU, and the processor operates according to a predetermined program, so that the above-mentioned image processing and detection processing can be performed.
- the image processing unit 5061 is composed of a plurality of GPUs, the image processing unit 5061 appropriately divides the information related to the image signal and performs image processing in parallel by the plurality of GPUs.
- the control unit 5063 performs various controls regarding the imaging of the surgical site by the endoscope 5001 and the display of the captured image. For example, the control unit 5063 generates a control signal for controlling the drive of the camera head 5005. At this time, when the imaging condition is input by the user, the control unit 5063 generates a control signal based on the input by the user. Alternatively, when the endoscope 5001 is equipped with an AE function, an AF function, and an AWB function, the control unit 5063 has an optimum exposure value, a focal length, and an optimum exposure value according to the result of detection processing by the image processing unit 5061. The white balance is calculated appropriately and a control signal is generated.
- control unit 5063 causes the display device 5041 to display the image of the surgical unit based on the image signal processed by the image processing unit 5061.
- the control unit 5063 recognizes various objects in the surgical unit image by using various image recognition techniques.
- the control unit 5063 detects a surgical tool such as forceps, a specific biological part, bleeding, a mist when using the energy treatment tool 5021, etc. by detecting the shape, color, etc. of the edge of the object included in the surgical site image. Can be recognized.
- the control unit 5063 uses the recognition result to superimpose and display various surgical support information on the image of the surgical site. By superimposing the surgery support information and presenting it to the surgeon 5067, it becomes possible to proceed with the surgery more safely and surely.
- the transmission cable 5065 connecting the camera head 5005 and the CCU 5039 is an electric signal cable compatible with electric signal communication, an optical fiber compatible with optical communication, or a composite cable thereof.
- the communication is performed by wire using the transmission cable 5065, but the communication between the camera head 5005 and the CCU 5039 may be performed wirelessly.
- the communication between the two is performed wirelessly, it is not necessary to lay the transmission cable 5065 in the operating room, so that the situation where the movement of the medical staff in the operating room is hindered by the transmission cable 5065 can be solved.
- the above is an example of the endoscopic surgery system 5000 to which the technique according to the present disclosure can be applied.
- the endoscopic surgery system 5000 has been described here as an example, the system to which the technique according to the present disclosure can be applied is not limited to such an example.
- the technique according to the present disclosure may be applied to a flexible endoscopic system for examination or a microsurgery system.
- the technique according to the present disclosure can be suitably applied to the camera head 5005 among the configurations described above.
- the wide-angle lens of the present disclosure can be suitably applied to the lens unit 5007 of the camera head 5005.
- the configuration may include a number of lenses different from the number of lenses shown in the above embodiment and the embodiment. Further, the configuration may further include a lens having substantially no refractive power.
- the present technology can have the following configuration.
- this technology in a configuration in which n (n ⁇ 4) negative lenses are arranged on the object side of the aperture, the configuration of each negative lens is optimized, so that the size is small. Although it has a large aperture, various aberrations are satisfactorily corrected, and high optical performance can be realized on the entire screen.
- a first negative lens consisting of a negative meniscus lens that is placed closest to the object and has a convex surface facing the object. Aperture and The second to nth (n ⁇ 4) negative lenses arranged in order from the object side to the image plane side between the first negative lens and the aperture, A biconvex air lens formed on the optical path between the second negative lens and the third negative lens is provided.
- a wide-angle lens that satisfies the following conditional expression.
- L1 ⁇ d Abbe number of the first negative lens
- Ln ⁇ d Abbe number of the nth negative lens
- fLa1 Let it be the focal length of the air lens.
- the first lens group having the first to nth negative lenses and With the aperture It has multiple lenses and has a second lens group with positive refractive power.
- the wide-angle lens according to the above [3] that satisfies the following conditional expression. 5.5 ⁇
- / f > (4) However, f: Focal length of the entire system in the state of focusing at infinity f1: The focal length of the first lens group.
- the wide-angle lens is A first negative lens consisting of a negative meniscus lens that is placed closest to the object and has a convex surface facing the object. Aperture and The second to nth (n ⁇ 4) negative lenses arranged in order from the object side to the image plane side between the first negative lens and the aperture, A biconvex air lens formed on the optical path between the second negative lens and the third negative lens is provided.
- An image pickup device that satisfies the following conditional expression.
- L1 ⁇ d Abbe number of the first negative lens
- Ln ⁇ d Abbe number of the nth negative lens
- the image pickup apparatus according to [7] above, wherein the wide-angle lens further includes a lens having substantially no refractive power.
Abstract
本開示の広角レンズは、最も物体側に配置され、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズと、絞りと、第1の負レンズと絞りとの間において、物体側から像面側に向かって順に配置された第2ないし第n(n≧4)の負レンズと、第2の負レンズと第3の負レンズとの間の光路上に形成された両凸形状の空気レンズとを備え、所定の条件式を満足する。
Description
本開示は、フォーカシング機能を有する広角レンズ、および、そのような広角レンズを備えた撮像装置に関する。
デジタルカメラ等において、風景や建造物撮影のために、広角レンズに対する需要がある。F値が明るい大口径の広角レンズとしては、長いフランジバックを確保したレトロフォーカスタイプの光学系が多く提案されている(例えば特許文献1,2参照)。
レトロフォーカスタイプの光学系は、フランジバックを確保しつつ広角化が比較的容易であるものの、長いフランジバックが取れるが故に光学系の小型化の制約となっている。また、諸収差の補正が困難である。
小型で大口径でありながら、諸収差が良好に補正され、画面全体で高い光学性能を実現可能な広角レンズ、およびそのような広角レンズを搭載した撮像装置を提供することが望ましい。
本開示の一実施の形態に係る広角レンズは、最も物体側に配置され、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズと、絞りと、第1の負レンズと絞りとの間において、物体側から像面側に向かって順に配置された第2ないし第n(n≧4)の負レンズと、第2の負レンズと第3の負レンズとの間の光路上に形成された両凸形状の空気レンズとを備え、以下の条件式を満足する。
L1νd≧Lkνd≧Lnνd ……(1)
Lnνd<35 ……(2)
ただし、
L1νd:第1の負レンズのアッベ数
Lnνd:第nの負レンズのアッベ数
Lkνd:第kの負レンズのアッベ数(k=2,…,n-1)
とする。
L1νd≧Lkνd≧Lnνd ……(1)
Lnνd<35 ……(2)
ただし、
L1νd:第1の負レンズのアッベ数
Lnνd:第nの負レンズのアッベ数
Lkνd:第kの負レンズのアッベ数(k=2,…,n-1)
とする。
本開示の一実施の形態に係る撮像装置は、広角レンズと、広角レンズによって形成された光学像に応じた撮像信号を出力する撮像素子とを含み、広角レンズを、上記本開示の一実施の形態に係る広角レンズによって構成したものである。
本開示の一実施の形態に係る広角レンズ、または撮像装置では、絞りよりも物体側にn(n≧4)枚の負レンズが配置された構成において、小型で大口径でありながら、諸収差が良好に補正され、画面全体で高い光学性能を実現可能な性能が得られるように、各負レンズの構成の最適化が図られている。
以下、本開示の実施の形態について図面を参照して詳細に説明する。なお、説明は以下の順序で行う。
0.比較例
1.レンズの基本構成
2.作用・効果
3.撮像装置への適用例
4.レンズの数値実施例
5.応用例
6.その他の実施の形態
0.比較例
1.レンズの基本構成
2.作用・効果
3.撮像装置への適用例
4.レンズの数値実施例
5.応用例
6.その他の実施の形態
<0.比較例>
レトロフォーカスタイプの光学系は、フランジバックを確保しつつ広角化が比較的容易であるものの、長いフランジバックが取れるが故に光学系の小型化の制約となっている。さらに物体側に強い負の屈折力を持つレンズ群と、像面側に強い正の屈折力を持つレンズ群とで構成されるため、コマ収差の抑制が難しい。また大口径化に伴う色収差などの諸収差の抑制が困難となる。
レトロフォーカスタイプの光学系は、フランジバックを確保しつつ広角化が比較的容易であるものの、長いフランジバックが取れるが故に光学系の小型化の制約となっている。さらに物体側に強い負の屈折力を持つレンズ群と、像面側に強い正の屈折力を持つレンズ群とで構成されるため、コマ収差の抑制が難しい。また大口径化に伴う色収差などの諸収差の抑制が困難となる。
特許文献1(特開2014-202952号公報)に記載の技術では、後群を開口絞りに対称なガウスタイプの構成とすることで、大口径化に伴う諸収差を補正している。一方、像面側の正の屈折力が強く全長短縮には不利な構成で、コマ収差の抑制も難しい。
また、特許文献2(特開2016-126279号公報)に記載の技術では、開口絞りを固定とすることでフォーカス群を軽量化している一方、後群はガウスタイプに近い対称な光学系を維持しているため、像面側の正の屈折力が強く、全長短縮には不利な構成であり、コマ収差の抑制も難しい。
<1.レンズの基本構成>
図1は、本開示の一実施の形態に係る広角レンズの第1の構成例を示しており、後述する実施例1の構成に相当する。図6は、一実施の形態に係る広角レンズの第2の構成例を示しており、後述する実施例2の構成に相当する。図11は、一実施の形態に係る広角レンズの第3の構成例を示しており、後述する実施例3の構成に相当する。図16は、一実施の形態に係る広角レンズの第4の構成例を示しており、後述する実施例4の構成に相当する。図21は、一実施の形態に係る広角レンズの第5の構成例を示しており、後述する実施例5の構成に相当する。
図1は、本開示の一実施の形態に係る広角レンズの第1の構成例を示しており、後述する実施例1の構成に相当する。図6は、一実施の形態に係る広角レンズの第2の構成例を示しており、後述する実施例2の構成に相当する。図11は、一実施の形態に係る広角レンズの第3の構成例を示しており、後述する実施例3の構成に相当する。図16は、一実施の形態に係る広角レンズの第4の構成例を示しており、後述する実施例4の構成に相当する。図21は、一実施の形態に係る広角レンズの第5の構成例を示しており、後述する実施例5の構成に相当する。
図1等において、Z1は光軸を示す。第1ないし第5の構成例に係る広角レンズ1~5と像面IMGとの間には、撮像素子保護用のカバーガラス等の光学部材が配置されていてもよい。また、カバーガラスの他にも、光学部材として、ローパスフィルタや赤外カットフィルタ等の各種の光学フィルタが配置されていてもよい。
以下、本開示の一実施の形態に係る広角レンズの構成を、適宜図1等に示した各構成例に係る広角レンズ1~5に対応付けて説明するが、本開示による技術は、図示した構成例に限定されるものではない。
一実施の形態に係る広角レンズは、最も物体側に配置され、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズL1と、開口絞りStと、第1の負レンズL1と開口絞りStとの間において、物体側から像面側に向かって順に配置された第2ないし第n(n≧4)の負レンズとを備える。また、一実施の形態に係る広角レンズは、第2の負レンズL2と第3の負レンズL3との間の光路上に形成された両凸形状の空気レンズLa1を備える。
ここで、一実施の形態に係る広角レンズにおいて、第1ないし第nの負レンズの「負レンズ」とは接合レンズも複数の単レンズの組み合わせとみなし、負の屈折力を持つ単レンズのことをいう。例えば1枚の接合レンズは2枚の単レンズの組み合わせとみなす。
一実施の形態に係る広角レンズは、以下の条件式(1),(2)を満足する。
L1νd≧Lkνd≧Lnνd ……(1)
Lnνd<35 ……(2)
ただし、
L1νd:第1の負レンズL1のアッベ数
Lnνd:第nの負レンズLnのアッベ数
Lkνd:第kの負レンズLkのアッベ数(k=2,…,n-1)
とする。
L1νd≧Lkνd≧Lnνd ……(1)
Lnνd<35 ……(2)
ただし、
L1νd:第1の負レンズL1のアッベ数
Lnνd:第nの負レンズLnのアッベ数
Lkνd:第kの負レンズLkのアッベ数(k=2,…,n-1)
とする。
その他、一実施の形態に係る広角レンズは、後述する所定の条件式等をさらに満足することが望ましい。
<2.作用・効果>
次に、本開示の一実施の形態に係る広角レンズの作用および効果を説明する。併せて、本開示の一実施の形態に係る広角レンズにおける、より望ましい構成を説明する。
なお、本明細書に記載された効果はあくまでも例示であって限定されるものではなく、また他の効果があってもよい。
次に、本開示の一実施の形態に係る広角レンズの作用および効果を説明する。併せて、本開示の一実施の形態に係る広角レンズにおける、より望ましい構成を説明する。
なお、本明細書に記載された効果はあくまでも例示であって限定されるものではなく、また他の効果があってもよい。
一実施の形態に係る広角レンズによれば、開口絞りStよりも物体側にn枚の負レンズが配置された構成において、各負レンズの構成の最適化を図るようにしたので、小型で大口径でありながら、諸収差が良好に補正され、画面全体で高い光学性能を実現可能となる。
一実施の形態に係る広角レンズは、最も物体側に、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズL1が配置され、第1の負レンズL1から開口絞りStまでに4枚以上の負レンズを有する。これにより、一実施の形態に係る広角レンズによれば、負のメニスカスレンズで構成された第1の負レンズL1を有することでコマ収差を良好に補正するこが可能となる。さらに最も物体側に配置された第1の負レンズL1にアッベ数の高い硝材を用い、開口絞りStに近づくに従い段階的にアッベ数の低い硝材を4枚以上の負レンズに使用することで、光線高さに合わせて効果的に倍率色収差や軸上色収差を良好に補正することができる。また、開口絞りStよりも物体側において、負の屈折力を分割することができ、各負レンズの1枚1枚の収差の発生を抑制し、かつ歪曲収差や像面湾曲などの諸収差を良好に補正することが可能となり、画面全域で良好な画像が得られる大口径広角レンズを提供できる。
一実施の形態に係る広角レンズにおいて、開口絞りStより物体側に配置されたレンズは、画角を大きくしつつバックフォーカスを十分に確保するワイドコンバーターの役割を担っている。開口絞りStより物体側に配置されたレンズはワイドコンバーターの役割を担うため、物体側を負の屈折力、像面側を正の屈折力としたレトロフォーカスタイプの屈折力の配置となる必要がある。この場合、開口絞りStに対して、コーニック係数が小さくなるような非球面形状の負メニスレンズL1を配置することにより、歪曲収差や像面湾曲を補正および、小型化が可能となる。
一実施の形態に係る広角レンズにおいて、開口絞りStより物体側に配置されたレンズは、ワイドコンバーターの役割を担う。このため、開口絞りStより物体側において、物体側を負の屈折力、像面側を正の屈折力としたレトロフォーカスタイプの屈折力の配置とする必要がある。一実施の形態に係る広角レンズでは、第2の負レンズL2と第3の負レンズL3との間に両凸形状の空気レンズLa1を有することで、開口絞りStより物体側において第1の負レンズL1の負の屈折力を抑制することができ、歪曲収差などの諸収差を補正することが可能である。
上記条件式(1)は、広角レンズにおいて倍率色収差を良好に補正しつつ、軸上色収差の発生を抑制する上で好ましい条件である。開口絞りStより物体側の複数の負レンズにおいて、相対的に物体側にある負レンズにアッベ数の低い硝材を使用すると倍率色収差の補正効果は弱い。一方で開口絞りSt付近の負レンズにアッベ数の高い硝材を使用すると倍率色収差の補正効果が弱いだけでなく、軸上色収差を発生させてしまい、良好に補正することが困難となる。
また、条件式(1)は、さらに以下の条件を満たすことで、より良好に色収差の補正を行うことができ、好ましい。
L1νd≧Lm-1・νd≧Lmνd ……(1)’
ただし、
Lmνd:レンズLkのアッベ数(m=3,…,n)
とする。
L1νd≧Lm-1・νd≧Lmνd ……(1)’
ただし、
Lmνd:レンズLkのアッベ数(m=3,…,n)
とする。
上記条件式(2)は、開口絞りStより物体側において、複数の負レンズのうち最も開口絞りStに近い位置にある第nの負レンズLnで発生する軸上色収差を抑制するための好ましい条件を規定するものである。条件式(2)の上限を上回ると軸上色収差の補正不足となり収差を取り切ることが困難となる。
ここで、条件式(2)の上限値を30とすることで軸上色収差の補正をより良好に行うことができ、好ましい。また、条件式(2)の上限値を28とすることで軸上色収差の補正をさらに良好に行うことができ、より好ましい。
また、一実施の形態に係る広角レンズは、以下の条件式(3)を満足することが望ましい。
-60<fLa1<-20 ……(3)
ただし、
fLa1:空気レンズLa1の焦点距離
とする。
-60<fLa1<-20 ……(3)
ただし、
fLa1:空気レンズLa1の焦点距離
とする。
空気レンズLa1は、負の屈折力を有する。空気レンズLa1は、歪曲収差やコマ収差を発生させる第1の負レンズL1の負の屈折力を抑制する役割を担う。条件式(3)は、空気レンズLa1が効果的にその役割を果たすために好ましい条件を規定するものである。
条件式(3)の上限値を上回ると、空気レンズLa1の物体側の面と像面側の面とで発生する諸収差が大きくなり、収差の補正が困難となるため好ましくない。ここで、条件式(3)の上限値を-22とすることで空気レンズLa1が発生させる諸収差をより抑制することができ、好ましい。また、条件式(3)の上限値を-24とすることで空気レンズLa1が発生させる諸収差をさらに抑制することができ、より好ましい。
また、条件式(3)の下限値を下回ると、第1の負レンズL1の負の屈折力が強くなるため、歪曲収差やコマ収差が大きく発生し、第1の負レンズL1より後続のレンズで諸収差を補正することが困難となり、負の屈折力を持つ空気レンズLa1の役割を十分に果たすことができなくなるため好ましくない。ここで、条件式(3)の下限値を-55とすることで第1の負レンズL1の負の屈折力をより抑えることができ、好ましい。また、条件式(3)の下限値を-50とすることで第1の負レンズL1の負の屈折力をさらに抑えることができ、より好ましい。
一実施の形態に係る広角レンズは、光軸Z1に沿って、物体側から像面側に向かって順に、第1ないし第nの負レンズを有する第1レンズ群G1と、開口絞りStと、複数のレンズを有し、正の屈折力を持つ第2レンズ群G2とを備えた構成であってもよい。この場合、フォーカシングに際して第2レンズ群G2全体もしくは第2レンズ群G2の複数のレンズのうち一部のレンズが光軸方向に移動する構成にすることが望ましい。これにより、メカ機構の簡易化を図ることができる。
なお、後述するように、第2の構成例(実施例2)では、第2レンズ群G2全体がフォーカス群とされている。第1の構成例(実施例1)、および第3の構成例(実施例3)~第5の構成例(実施例5)では、第2レンズ群G2の一部のレンズがフォーカス群とされている。図1等では、無限遠合焦時のレンズ配置を示している。図1等には、無限遠から近距離へとフォーカシングする際のフォーカス群の移動方向を矢印で示す。
また、一実施の形態に係る広角レンズは、以下の条件式(4)を満足することが望ましい。
5.5<|f1|/f ……(4)
ただし、
f:無限遠にフォーカシングした状態における全系の焦点距離
f1:第1レンズ群G1の焦点距離
とする。
5.5<|f1|/f ……(4)
ただし、
f:無限遠にフォーカシングした状態における全系の焦点距離
f1:第1レンズ群G1の焦点距離
とする。
一実施の形態に係る広角レンズにおいて、第1レンズ群G1はワイドコンバーターに近い役割を担っており、アフォーカル光学系に近づけることで歪曲収差や球面収差の発生を抑制することができる。また第1レンズ群G1の屈折力が強くなることで負のメニスカスレンズの外径や絞り径の大きさを変化させるため、製品としてのレンズ外径に影響を及ぼす。
条件式(4)は、歪曲収差や球面収差の発生を抑制しつつ、レンズの小型化を実現するために好ましい範囲を規定するものである。第1レンズ群G1が正の屈折力を持ち、条件式(4)の下限を下回ると、歪曲収差が大きく発生し、収差の補正が困難なる。また開口絞りSt付近の光線が高くなり、絞り径が大きくなることで製品としてのレンズ外径が大きくなるため、好ましくない。第1レング群G1が負の屈折力を持ち、条件式(4)の下限を下回ると、球面収差が大きく発生し、収差の補正が困難となる。また負のメニスカスレンズからなる第1の負レンズL1の外径が大きくなり、製品としてのレンズ外径が大きくなるため、好ましくない。
ここで、条件式(4)の下限値を6.5とすることでより諸収差の発生を抑制しつつ、小型化が可能となり好ましい。また、条件式(4)の下限値を7.3とすることでさらに諸収差の発生を抑制しつつ、小型化が可能となり、より好ましい。
また、一実施の形態に係る広角レンズは、以下の条件式(5)を満足することが望ましい。
0.38<BF/f<1.0 ……(5)
ただし、
f:無限遠にフォーカシングした状態における全系の焦点距離
BF:最も像面側のレンズ面から像面IMGまでの距離
とする。
0.38<BF/f<1.0 ……(5)
ただし、
f:無限遠にフォーカシングした状態における全系の焦点距離
BF:最も像面側のレンズ面から像面IMGまでの距離
とする。
条件式(5)の上限を上回ると、バックフォーカスが長くなるため、光学系の短縮が困難となる。また、条件式(5)の下限を下回ると、最も像面側のレンズ面と像面IMGとの距離が短くなるため、製品のメカ設計が難しくなる。
ここで、条件式(5)の上限値を0.8とすることでよりバックフォーカスを短くでき、光学系の短縮が可能となり、好ましい。また、条件式(5)の下限値を0.45とすることで、最も像面側のレンズ面と像面IMGとの距離をより確保しやすくなり、好ましい。
また、一実施の形態に係る広角レンズは、以下の条件式(6)を満足することが望ましい。
3.0<|f1|/f2 ……(6)
ただし、
f1:第1レンズ群G1の焦点距離
f2:無限遠にフォーカシングした状態における第2レンズ群G2の焦点距離
とする。
3.0<|f1|/f2 ……(6)
ただし、
f1:第1レンズ群G1の焦点距離
f2:無限遠にフォーカシングした状態における第2レンズ群G2の焦点距離
とする。
条件式(6)は第1レンズ群G1と第2レンズ群G2との屈折力の比を適切に設定するための条件式である。第1レンズ群G1は画角を大きくしつつバックフォーカスを十分に確保するワイドコンバーターの役割を担っている。第2レンズ群G2に対して第1レンズ群G1からの入射光線をアフォーカルにすることによって、フォーカシング時の球面収差変動を抑制することができる。
ここで、条件式(6)の下限値は、3.5とすることで球面収差などの諸収差を抑制することができ、好ましい。また、条件式(6)の下限値は、4.0とすることで球面収差などの諸収差を抑制することができ、より好ましい。
<3.撮像装置への適用例>
次に、本開示の一実施の形態に係る広角レンズの具体的な撮像装置への適用例を説明する。
次に、本開示の一実施の形態に係る広角レンズの具体的な撮像装置への適用例を説明する。
図26は、一実施の形態に係る広角レンズを適用した撮像装置100の一構成例を示している。この撮像装置100は、例えばデジタルスチルカメラであり、カメラブロック10と、カメラ信号処理部20と、画像処理部30と、LCD(Liquid Crystal Display)40と、R/W(リーダ/ライタ)50と、CPU(Central Processing Unit)60と、入力部70と、レンズ駆動制御部80とを備えている。
カメラブロック10は、撮像機能を担うものであり、撮像レンズ11と、CCD(Charge Coupled Devices)やCMOS(Complementary Metal Oxide Semiconductor)等の撮像素子12とを有している。撮像素子12は、撮像レンズ11によって形成された光学像を電気信号へ変換することで、光学像に応じた撮像信号(画像信号)を出力するようになっている。撮像レンズ11として、図1等に示した各構成例に係る広角レンズ1~5を適用可能である。
カメラ信号処理部20は、撮像素子12から出力された画像信号に対してアナログ-デジタル変換、ノイズ除去、画質補正、輝度・色差信号への変換等の各種の信号処理を行うものである。
画像処理部30は、画像信号の記録再生処理を行うものであり、所定の画像データフォーマットに基づく画像信号の圧縮符号化・伸張復号化処理や解像度等のデータ仕様の変換処理等を行うようになっている。
LCD40は、ユーザの入力部70に対する操作状態や撮影した画像等の各種のデータを表示する機能を有している。R/W50は、画像処理部30によって符号化された画像データのメモリカード1000への書き込み、およびメモリカード1000に記録された画像データの読み出しを行うものである。メモリカード1000は、例えば、R/W50に接続されたスロットに対して着脱可能な半導体メモリーである。
CPU60は、撮像装置100に設けられた各回路ブロックを制御する制御処理部として機能するものであり、入力部70からの指示入力信号等に基づいて各回路ブロックを制御するようになっている。入力部70は、ユーザによって所要の操作が行われる各種のスイッチ等からなる。入力部70は例えば、シャッタ操作を行うためのシャッタレリーズボタンや、動作モードを選択するための選択スイッチ等によって構成され、ユーザによる操作に応じた指示入力信号をCPU60に対して出力するようになっている。レンズ駆動制御部80は、カメラブロック10に配置されたレンズの駆動を制御するものであり、CPU60からの制御信号に基づいて撮像レンズ11の各レンズを駆動する図示しないモータ等を制御するようになっている。
以下に、撮像装置100における動作を説明する。
撮影の待機状態では、CPU60による制御の下で、カメラブロック10において撮影された画像信号が、カメラ信号処理部20を介してLCD40に出力され、カメラスルー画像として表示される。また、例えば入力部70からのズーミングやフォーカシングのための指示入力信号が入力されると、CPU60がレンズ駆動制御部80に制御信号を出力し、レンズ駆動制御部80の制御に基づいて撮像レンズ11の所定のレンズが移動する。
撮影の待機状態では、CPU60による制御の下で、カメラブロック10において撮影された画像信号が、カメラ信号処理部20を介してLCD40に出力され、カメラスルー画像として表示される。また、例えば入力部70からのズーミングやフォーカシングのための指示入力信号が入力されると、CPU60がレンズ駆動制御部80に制御信号を出力し、レンズ駆動制御部80の制御に基づいて撮像レンズ11の所定のレンズが移動する。
入力部70からの指示入力信号によりカメラブロック10の図示しないシャッタが動作されると、撮影された画像信号がカメラ信号処理部20から画像処理部30に出力されて圧縮符号化処理され、所定のデータフォーマットのデジタルデータに変換される。変換されたデータはR/W50に出力され、メモリカード1000に書き込まれる。
なお、フォーカシングは、例えば、入力部70のシャッタレリーズボタンが半押しされた場合や記録(撮影)のために全押しされた場合等に、CPU60からの制御信号に基づいてレンズ駆動制御部80が撮像レンズ11の所定のレンズを移動させることにより行われる。
メモリカード1000に記録された画像データを再生する場合には、入力部70に対する操作に応じて、R/W50によってメモリカード1000から所定の画像データが読み出され、画像処理部30によって伸張復号化処理が行われた後、再生画像信号がLCD40に出力されて再生画像が表示される。
なお、上記した実施の形態においては、撮像装置をデジタルスチルカメラ等に適用した例を示したが、撮像装置の適用範囲はデジタルスチルカメラに限られることはなく、他の種々の撮像装置に適用可能である。例えば、デジタル一眼レフカメラ、デジタルノンレフレックスカメラ、デジタルビデオカメラ、および監視カメラ等に適用することができる。また、カメラが組み込まれた携帯電話や、カメラが組み込まれた情報端末等のデジタル入出力機器のカメラ部等として広く適用することができる。また、レンズ交換式のカメラにも適用することができる。
<4.レンズの数値実施例>
次に、本開示の一実施の形態に係る広角レンズの具体的な数値実施例について説明する。ここでは、図1等に示した各構成例に係る広角レンズ1~5に、具体的な数値を適用した実施例を説明する。
次に、本開示の一実施の形態に係る広角レンズの具体的な数値実施例について説明する。ここでは、図1等に示した各構成例に係る広角レンズ1~5に、具体的な数値を適用した実施例を説明する。
なお、以下の各表や説明において示した記号の意味等については、下記に示す通りである。「Si」は、最も物体側から順次増加するようにして符号を付したi番目の面の番号を示している。「ri」は、i番目の面の近軸の曲率半径の値(mm)を示す。「di」はi番目の面とi+1番目の面との間の光軸上の間隔の値(mm)を示す。「ndi」はi番目の面を有する光学要素の材質のd線(波長587.6nm)に対する屈折率の値を示す。「νdi」はi番目の面を有する光学要素の材質のd線におけるアッベ数の値を示す。「ri」の値が「∞」となっている部分は平面、または絞り面等を示す。面番号(Si)の欄の「ASP」は、当該面が非球面形状で構成されていることを示す。面番号の欄の「STO」は該当位置に開口絞りStが配置されていることを示す。面番号の欄の「OBJ」は、当該面が物体面(被写体面)であることを示す。面番号の欄の「IMG」は、当該面が像面であることを示す。「f」は全系の焦点距離を示す(単位:mm)。「Fno」は開放F値(Fナンバー)を示す。「ω」は半画角を示す(単位:°)。「Y」は像高を示す(単位:mm)。「L」は光学全長(最も物体側の面から像面IMGまでの光軸上の距離)を示す(単位:mm)。
また、各実施例において用いられるレンズには、レンズ面が非球面によって構成されるものがある。非球面形状は、以下の式によって定義される。なお、後述する非球面係数を示す各表において、「E-i」は10を底とする指数表現、すなわち、「10-i」を表しており、例えば、「0.12345E-05」は「0.12345×10-5」を表している。
(非球面の式)
x=cy2/(1+(1-(1+k)c2y2)1/2)+A4・y4+A6・y6+A8・y8+A10・y10+A12・y12
ここで、レンズ面の頂点から光軸方向の距離(サグ量)を「x」、光軸と垂直な方向の高さを「y」、レンズ面の頂点での近軸曲率(曲率半径の逆数)を「c」、円錐(コーニック)定数を「k」とする。A4、A6、A8、A10およびA12は、それぞれ第4次、第6次、第8次、第10次および第12次の非球面係数である。
x=cy2/(1+(1-(1+k)c2y2)1/2)+A4・y4+A6・y6+A8・y8+A10・y10+A12・y12
ここで、レンズ面の頂点から光軸方向の距離(サグ量)を「x」、光軸と垂直な方向の高さを「y」、レンズ面の頂点での近軸曲率(曲率半径の逆数)を「c」、円錐(コーニック)定数を「k」とする。A4、A6、A8、A10およびA12は、それぞれ第4次、第6次、第8次、第10次および第12次の非球面係数である。
[実施例1]
[表1]に、図1に示した実施例1に係る広角レンズ1の基本的なレンズデータを示す。[表2]には、実施例1に係る広角レンズ1における全系の焦点距離f、F値、全画角2ω、像高Y、および光学全長Lの値を示す。[表3]には、実施例1に係る広角レンズ1においてフォーカシングの際に可変となる面間隔のデータを示す。[表4]には、実施例1に係る広角レンズ1における、非球面の形状を表す係数の値を示す。[表5]には、実施例1に係る広角レンズ1の各群の始面と焦点距離(単位:mm)とを示す。
[表1]に、図1に示した実施例1に係る広角レンズ1の基本的なレンズデータを示す。[表2]には、実施例1に係る広角レンズ1における全系の焦点距離f、F値、全画角2ω、像高Y、および光学全長Lの値を示す。[表3]には、実施例1に係る広角レンズ1においてフォーカシングの際に可変となる面間隔のデータを示す。[表4]には、実施例1に係る広角レンズ1における、非球面の形状を表す係数の値を示す。[表5]には、実施例1に係る広角レンズ1の各群の始面と焦点距離(単位:mm)とを示す。
実施例1に係る広角レンズ1は、最も物体側に、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズL1を有する。また、第1の負レンズL1から開口絞りStまでに4枚の負レンズ(第1の負レンズL1、第2の負レンズL2、第3の負レンズL3、および第4の負レンズL4)を有する。また、実施例1に係る広角レンズ1は、光軸Z1に沿って、物体側から像面側に向かって順に、負の屈折力を有する第1レンズ群G1と、開口絞りStと、正の屈折力を有する第2レンズ群G2とから構成される。
第1レンズ群G1は物体側より順に、第1の負レンズL1と、第2の負レンズL2と、正レンズE3と、第3の負レンズL3と、正レンズE5と、正レンズE6と、第4の負レンズL4とから構成される。
第2の負レンズL2は、両凹形状となっている。正レンズE3は、物体側に凸面を向けた正のメニスカスレンズからなる。第3の負レンズL3は両凹形状となっている。正レンズE5は両凸形状となっている。正レンズE6は、像面側に凸面を向けた正のメニスカスレンズからなる。第4の負レンズL4は、像面側に凸面を向けた負のメニスカスレンズからなる。
第1の負レンズL1は両面に非球面形状が形成された非球面レンズである。第2の負レンズL2と正レンズE3は、互いに貼り合されて接合レンズを形成している。第3の負レンズL3と正レンズE5は、互いに貼り合されて接合レンズを形成している。正レンズE6と第4の負レンズL4は、それぞれ互いに貼り合されて接合レンズを形成している。
以上のように、第1レンズ群G1は7枚のレンズより構成される。接合レンズを1つのレンズ成分とみなすと、第1レンズ群G1は4つのレンズ成分より構成される。
なお、第1レンズ群G1内において、正レンズE3と第3の負レンズL3との間には、負の屈折力を有する空気レンズLa1が形成されている。
第2レンズ群G2は物体側より順に、レンズE8~レンズE14からなる。レンズE8は、両凸形状の正レンズである。レンズE9は、両凸形状の正レンズである。レンズE10は、両凹形状の負レンズである。レンズE11は、両凸形状の正レンズである。レンズE12は、物体側に凸面を向けた負のメニスカスレンズである。レンズE13は、両凹形状の負レンズである。レンズE14は、物体側に凸面を向けた正のメニスカスレンズである。
レンズE9とレンズE10は、それぞれ互いに貼り合されて接合レンズを形成している。レンズE13は、両面に非球面形状が形成された非球面レンズである。
以上のように、第2レンズ群G2は7枚のレンズより構成される。接合レンズを1つのレンズ成分とみなすと、第2レンズ群G2は6つのレンズ成分より構成される。
実施例1に係る広角レンズ1は、無限遠物体から近距離物体へのフォーカシングに際しては、レンズE8からレンズE13が光軸方向に移動する。すなわち、第2レンズ群G2の一部のレンズがフォーカス群とされている。ただし、フォーカシングに際しては第2レンズ群G2内の空気間隔を隔てて前後する複数のレンズを異なる移動比で移動させても良い。





図2には、実施例1に係る広角レンズ1の無限遠合焦時における縦収差を示す。図3には、実施例1に係る広角レンズ1の近距離合焦時における縦収差を示す。図4には、実施例1に係る広角レンズ1の無限遠合焦時における横収差を示す。図5には、実施例1に係る広角レンズ1の近距離合焦時における横収差を示す。
図2および図3には、縦収差として、球面収差、非点収差(像面湾曲)、および歪曲収差を示す。図2および図3の球面収差図、図4および図5の横収差図において、実線はd線(587.56nm)、一点鎖線はg線(435.84nm)、破線はC線(656.27nm)における値を示す。非点収差図において、Sはサジタル像面、Tはタンジェンシャル像面における値を示す。歪曲収差図には、d線における値を示す。図4および図5の横収差図において、左側にはタンジェンシャル像面、右側にはサジタル像面における値を示す。
以降の他の実施例における収差図についても同様である。
以降の他の実施例における収差図についても同様である。
実施例1に係る広角レンズ1は、以上の構成により、Fナンバー1.4程度の大口径を実現しつつ小型化を実現している。また、各収差図から分かるように、実施例1に係る広角レンズ1は、諸収差が良好に補正され、優れた結像性能を有している。
[実施例2]
[表6]に、図6に示した実施例2に係る広角レンズ2の基本的なレンズデータを示す。[表7]には、実施例2に係る広角レンズ2における全系の焦点距離f、F値、全画角2ω、像高Y、および光学全長Lの値を示す。[表8]には、実施例2に係る広角レンズ2においてフォーカシングの際に可変となる面間隔のデータを示す。[表9]には、実施例2に係る広角レンズ2における、非球面の形状を表す係数の値を示す。[表10]には、実施例2に係る広角レンズ2の各群の始面と焦点距離(単位:mm)とを示す。
[表6]に、図6に示した実施例2に係る広角レンズ2の基本的なレンズデータを示す。[表7]には、実施例2に係る広角レンズ2における全系の焦点距離f、F値、全画角2ω、像高Y、および光学全長Lの値を示す。[表8]には、実施例2に係る広角レンズ2においてフォーカシングの際に可変となる面間隔のデータを示す。[表9]には、実施例2に係る広角レンズ2における、非球面の形状を表す係数の値を示す。[表10]には、実施例2に係る広角レンズ2の各群の始面と焦点距離(単位:mm)とを示す。
実施例2に係る広角レンズ2は、最も物体側に、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズL1を有する。また、第1の負レンズL1から開口絞りStまでに4枚の負レンズ(第1の負レンズL1、第2の負レンズL2、第3の負レンズL3、および第4の負レンズL4)を有する。また、実施例2に係る広角レンズ2は、光軸Z1に沿って、物体側から像面側に向かって順に、正の屈折力を有する第1レンズ群G1と、開口絞りStと、正の屈折力を有する第2レンズ群G2とから構成される。
第1レンズ群G1は物体側より順に、第1の負レンズL1と、第2の負レンズL2と、正レンズE3と、第3の負レンズL3と、正レンズE5と、正レンズE6と、第4の負レンズL4とから構成される。
第2の負レンズL2は、両凹形状となっている。正レンズE3は、物体側に凸面を向けた正のメニスカスレンズからなる。第3の負レンズL3は両凹形状となっている。正レンズE5は両凸形状となっている。正レンズE6は、両凸形状となっている。第4の負レンズL4は、像面側に凸面を向けた負のメニスカスレンズからなる。
第1の負レンズL1は両面に非球面形状が形成された非球面レンズである。第2の負レンズL2と正レンズE3は、互いに貼り合されて接合レンズを形成している。第3の負レンズL3と正レンズE5は、互いに貼り合されて接合レンズを形成している。正レンズE6と第4の負レンズL4は、それぞれ互いに貼り合されて接合レンズを形成している。
以上のように、第1レンズ群G1は7枚のレンズより構成される。接合レンズを1つのレンズ成分とみなすと、第1レンズ群G1は4つのレンズ成分より構成される。
なお、第1レンズ群G1内において、正レンズE3と第3の負レンズL3との間には、負の屈折力を有する空気レンズLa1が形成されている。
第2レンズ群G2は物体側より順に、レンズE8~レンズE13からなる。レンズE8は、両凸形状の正レンズである。レンズE9は、両凹形状の負レンズである。レンズE10は、両凸形状の正レンズである。レンズE11は、両凸形状の正レンズである。レンズE12は、物体側に凸面を向けた負のメニスカスレンズである。レンズE13は、両凹形状の負レンズである。
レンズE8とレンズE9は、それぞれ互いに貼り合されて接合レンズを形成している。レンズE13は、両面に非球面形状が形成された非球面レンズである。
以上のように、第2レンズ群G2は6枚のレンズより構成される。接合レンズを1つのレンズ成分とみなすと、第2レンズ群G2は5つのレンズ成分より構成される。
実施例2に係る広角レンズ2は、無限遠物体から近距離物体へのフォーカシングに際しては、レンズE8からレンズE13が光軸方向に移動する。すなわち、第2レンズ群G2全体がフォーカス群とされている。ただし、フォーカシングに際しては第2レンズ群G2内の空気間隔を隔てて前後する複数のレンズを異なる移動比で移動させても良い。





図7には、実施例2に係る広角レンズ2の無限遠合焦時における縦収差を示す。図8には、実施例2に係る広角レンズ2の近距離合焦時における縦収差を示す。図9には、実施例2に係る広角レンズ2の無限遠合焦時における横収差を示す。図10には、実施例2に係る広角レンズ2の近距離合焦時における横収差を示す。
実施例2に係る広角レンズ2は、以上の構成により、Fナンバー1.4程度の大口径を実現しつつ小型化を実現している。また、各収差図から分かるように、実施例2に係る広角レンズ2は、諸収差が良好に補正され、優れた結像性能を有している。
[実施例3]
[表11]に、図11に示した実施例3に係る広角レンズ3の基本的なレンズデータを示す。[表12]には、実施例3に係る広角レンズ3における全系の焦点距離f、F値、全画角2ω、像高Y、および光学全長Lの値を示す。[表13]には、実施例3に係る広角レンズ3においてフォーカシングの際に可変となる面間隔のデータを示す。[表14]には、実施例3に係る広角レンズ3における、非球面の形状を表す係数の値を示す。[表15]には、実施例3に係る広角レンズ3の各群の始面と焦点距離(単位:mm)とを示す。
[表11]に、図11に示した実施例3に係る広角レンズ3の基本的なレンズデータを示す。[表12]には、実施例3に係る広角レンズ3における全系の焦点距離f、F値、全画角2ω、像高Y、および光学全長Lの値を示す。[表13]には、実施例3に係る広角レンズ3においてフォーカシングの際に可変となる面間隔のデータを示す。[表14]には、実施例3に係る広角レンズ3における、非球面の形状を表す係数の値を示す。[表15]には、実施例3に係る広角レンズ3の各群の始面と焦点距離(単位:mm)とを示す。
実施例3に係る広角レンズ3は、最も物体側に、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズL1を有する。また、第1の負レンズL1から開口絞りStまでに4枚の負レンズ(第1の負レンズL1、第2の負レンズL2、第3の負レンズL3、および第4の負レンズL4)を有する。また、実施例3に係る広角レンズ3は、光軸Z1に沿って、物体側から像面側に向かって順に、負の屈折力を有する第1レンズ群G1と、開口絞りStと、正の屈折力を有する第2レンズ群G2とから構成される。
第1レンズ群G1は物体側より順に、第1の負レンズL1と、第2の負レンズL2と、正レンズE3と、第3の負レンズL3と、正レンズE5と、正レンズE6と、第4の負レンズL4とから構成される。
第2の負レンズL2は、物体側に凸面を向けた負のメニスカスレンズからなる。正レンズE3は、物体側に凸面を向けた正のメニスカスレンズからなる。第3の負レンズL3は両凹形状となっている。正レンズE5は両凸形状となっている。正レンズE6は、両凸形状となっている。第4の負レンズL4は、像面側に凸面を向けた負のメニスカスレンズからなる。
第1の負レンズL1は両面に非球面形状が形成された非球面レンズである。第2の負レンズL2と正レンズE3は、互いに貼り合されて接合レンズを形成している。第3の負レンズL3と正レンズE5は、互いに貼り合されて接合レンズを形成している。正レンズE6と第4の負レンズL4は、それぞれ互いに貼り合されて接合レンズを形成している。
以上のように、第1レンズ群G1は7枚のレンズより構成される。接合レンズを1つのレンズ成分とみなすと、第1レンズ群G1は4つのレンズ成分より構成される。
なお、第1レンズ群G1内において、正レンズE3と第3の負レンズL3との間には、負の屈折力を有する空気レンズLa1が形成されている。
第2レンズ群G2は物体側より順に、レンズE8~レンズE14からなる。レンズE8は、両凸形状の正レンズである。レンズE9は、両凹形状の負レンズである。レンズE10は、両凸形状の正レンズである。レンズE11は、両凸形状の正レンズである。レンズE12は、物体側に凸面を向けた負のメニスカスレンズである。レンズE13は、両凹形状の負レンズである。レンズE14は、両凸形状の正レンズである。
レンズE8とレンズE9は、それぞれ互いに貼り合されて接合レンズを形成している。レンズE13は、両面に非球面形状が形成された非球面レンズである。
以上のように、第2レンズ群G2は7枚のレンズより構成される。接合レンズを1つのレンズ成分とみなすと、第2レンズ群G2は6つのレンズ成分より構成される。
実施例3に係る広角レンズ3は、無限遠物体から近距離物体へのフォーカシングに際しては、レンズE8からレンズE13が光軸方向に移動する。すなわち、第2レンズ群G2の一部のレンズがフォーカス群とされている。ただし、フォーカシングに際しては第2レンズ群G2内の空気間隔を隔てて前後する複数のレンズを異なる移動比で移動させても良い。





図12には、実施例3に係る広角レンズ3の無限遠合焦時における縦収差を示す。図13には、実施例3に係る広角レンズ3の近距離合焦時における縦収差を示す。図14には、実施例3に係る広角レンズ3の無限遠合焦時における横収差を示す。図15には、実施例3に係る広角レンズ3の近距離合焦時における横収差を示す。
実施例3に係る広角レンズ3は、以上の構成により、Fナンバー1.4程度の大口径を実現しつつ小型化を実現している。また、各収差図から分かるように、実施例3に係る広角レンズ3は、諸収差が良好に補正され、優れた結像性能を有している。
[実施例4]
[表16]に、図16に示した実施例4に係る広角レンズ4の基本的なレンズデータを示す。[表17]には、実施例4に係る広角レンズ4における全系の焦点距離f、F値、全画角2ω、像高Y、および光学全長Lの値を示す。[表18]には、実施例4に係る広角レンズ4においてフォーカシングの際に可変となる面間隔のデータを示す。[表19]には、実施例4に係る広角レンズ4における、非球面の形状を表す係数の値を示す。[表20]には、実施例4に係る広角レンズ4の各群の始面と焦点距離(単位:mm)とを示す。
[表16]に、図16に示した実施例4に係る広角レンズ4の基本的なレンズデータを示す。[表17]には、実施例4に係る広角レンズ4における全系の焦点距離f、F値、全画角2ω、像高Y、および光学全長Lの値を示す。[表18]には、実施例4に係る広角レンズ4においてフォーカシングの際に可変となる面間隔のデータを示す。[表19]には、実施例4に係る広角レンズ4における、非球面の形状を表す係数の値を示す。[表20]には、実施例4に係る広角レンズ4の各群の始面と焦点距離(単位:mm)とを示す。
実施例4に係る広角レンズ4は、最も物体側に、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズL1を有する。また、第1の負レンズL1から開口絞りStまでに5枚の負レンズ(第1の負レンズL1、第2の負レンズL2、第3の負レンズL3、第4の負レンズL4、および第5の負レンズL5)を有する。また、実施例4に係る広角レンズ4は、光軸Z1に沿って、物体側から像面側に向かって順に、正の屈折力を有する第1レンズ群G1と、開口絞りStと、正の屈折力を有する第2レンズ群G2とから構成される。
第1レンズ群G1は物体側より順に、第1の負レンズL1と、第2の負レンズL2と、第3の負レンズL3と、正レンズE4と、第4の負レンズL4と、正レンズE6と、正レンズE7と、第5の負レンズL5とから構成される。
第2の負レンズL2は、物体側に凸面を向けた負のメニスカスレンズからなる。第3の負レンズL3は両凹形状となっている。正レンズE4は、両凸形状となっている。第4の負レンズL4は、像面側に凸面を向けた負のメニスカスレンズからなる。正レンズE6は像面側に凸面を向けた正のメニスカスレンズからなる。正レンズE7は、両凸形状となっている。第5の負レンズL5は、像面側に凸面を向けた負のメニスカスレンズからなる。
第1の負レンズL1は両面に非球面形状が形成された非球面レンズである。第3の負レンズL3と正レンズE4は、互いに貼り合されて接合レンズを形成している。第4の負レンズL4と正レンズE6は、互いに貼り合されて接合レンズを形成している。正レンズE7と第5の負レンズL5は、それぞれ互いに貼り合されて接合レンズを形成している。
以上のように、第1レンズ群G1は8枚のレンズより構成される。接合レンズを1つのレンズ成分とみなすと、第1レンズ群G1は5つのレンズ成分より構成される。
なお、第1レンズ群G1内において、第2の負レンズL2と第3の負レンズL3との間には、負の屈折力を有する空気レンズLa1が形成されている。
第2レンズ群G2は物体側より順に、レンズE9~レンズE15からなる。レンズE9は、両凸形状の正レンズである。レンズE10は、両凹形状の負レンズである。レンズE11は、両凸形状の正レンズである。レンズE12は、両凸形状の正レンズである。レンズE13は、物体側に凸面を向けた負のメニスカスレンズからなる。レンズE14は、両凹形状の負レンズである。レンズE15は、両凸形状の正レンズである。
レンズE9とレンズE10は、それぞれ互いに貼り合されて接合レンズを形成している。レンズE14は、両面に非球面形状が形成された非球面レンズである。
以上のように、第2レンズ群G2は7枚のレンズより構成される。接合レンズを1つのレンズ成分とみなすと、第2レンズ群G2は6つのレンズ成分より構成される。
実施例4に係る広角レンズ4は、無限遠物体から近距離物体へのフォーカシングに際しては、レンズE9からレンズE14が光軸方向に移動する。すなわち、第2レンズ群G2の一部のレンズがフォーカス群とされている。ただし、フォーカシングに際しては第2レンズ群G2内の空気間隔を隔てて前後する複数のレンズを異なる移動比で移動させても良い。





図17には、実施例4に係る広角レンズ4の無限遠合焦時における縦収差を示す。図18には、実施例4に係る広角レンズ4の近距離合焦時における縦収差を示す。図19には、実施例4に係る広角レンズ4の無限遠合焦時における横収差を示す。図20には、実施例4に係る広角レンズ4の近距離合焦時における横収差を示す。
実施例4に係る広角レンズ4は、以上の構成により、Fナンバー1.8程度の大口径を実現しつつ小型化を実現している。また、各収差図から分かるように、実施例4に係る広角レンズ4は、諸収差が良好に補正され、優れた結像性能を有している。
[実施例5]
[表21]に、図21に示した実施例5に係る広角レンズ5の基本的なレンズデータを示す。[表22]には、実施例5に係る広角レンズ5における全系の焦点距離f、F値、全画角2ω、像高Y、および光学全長Lの値を示す。[表23]には、実施例5に係る広角レンズ5においてフォーカシングの際に可変となる面間隔のデータを示す。[表24]には、実施例5に係る広角レンズ5における、非球面の形状を表す係数の値を示す。[表25]には、実施例5に係る広角レンズ5の各群の始面と焦点距離(単位:mm)とを示す。
[表21]に、図21に示した実施例5に係る広角レンズ5の基本的なレンズデータを示す。[表22]には、実施例5に係る広角レンズ5における全系の焦点距離f、F値、全画角2ω、像高Y、および光学全長Lの値を示す。[表23]には、実施例5に係る広角レンズ5においてフォーカシングの際に可変となる面間隔のデータを示す。[表24]には、実施例5に係る広角レンズ5における、非球面の形状を表す係数の値を示す。[表25]には、実施例5に係る広角レンズ5の各群の始面と焦点距離(単位:mm)とを示す。
実施例5に係る広角レンズ5は、最も物体側に、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズL1を有する。また、第1の負レンズL1から開口絞りStまでに4枚の負レンズ(第1の負レンズL1、第2の負レンズL2、第3の負レンズL3、および第4の負レンズL4)を有する。また、実施例5に係る広角レンズ5は、光軸Z1に沿って、物体側から像面側に向かって順に、負の屈折力を有する第1レンズ群G1と、開口絞りStと、正の屈折力を有する第2レンズ群G2とから構成される。
第1レンズ群G1は物体側より順に、第1の負レンズL1と、第2の負レンズL2と、正レンズE3と、第3の負レンズL3と、正レンズE5と、正レンズE6と、第4の負レンズL4とから構成される。
第2の負レンズL2は、物体側に凸面を向けた負のメニスカスレンズからなる。正レンズE3は、物体側に凸面を向けた正のメニスカスレンズからなる。第3の負レンズL3は両凹形状となっている。正レンズE5は両凸形状となっている。正レンズE6は、両凸形状となっている。第4の負レンズL4は、像面側に凸面を向けた負のメニスカスレンズからなる。
第1の負レンズL1は両面に非球面形状が形成された非球面レンズである。第2の負レンズL2と正レンズE3は、互いに貼り合されて接合レンズを形成している。第3の負レンズL3と正レンズE5は、互いに貼り合されて接合レンズを形成している。正レンズE6と第4の負レンズL4は、それぞれ互いに貼り合されて接合レンズを形成している。
以上のように、第1レンズ群G1は7枚のレンズより構成される。接合レンズを1つのレンズ成分とみなすと、第1レンズ群G1は4つのレンズ成分より構成される。
なお、第1レンズ群G1内において、正レンズE3と第3の負レンズL3との間には、負の屈折力を有する空気レンズLa1が形成されている。
第2レンズ群G2は物体側より順に、レンズE8~レンズE14からなる。レンズE8は、両凸形状の正レンズである。レンズE9は、両凹形状の負レンズである。レンズE10は、両凸形状の正レンズである。レンズE11は、両凸形状の正レンズである。レンズE12は、物体側に凸面を向けた負のメニスカスレンズである。レンズE13は、両凹形状の負レンズである。レンズE14は、両凸形状の正レンズである。
レンズE8とレンズE9は、それぞれ互いに貼り合されて接合レンズを形成している。レンズE13は、両面に非球面形状が形成された非球面レンズである。
以上のように、第2レンズ群G2は7枚のレンズより構成される。接合レンズを1つのレンズ成分とみなすと、第2レンズ群G2は6つのレンズ成分より構成される。
実施例5に係る広角レンズ5は、無限遠物体から近距離物体へのフォーカシングに際しては、レンズE8からレンズE13が光軸方向に移動する。すなわち、第2レンズ群G2の一部のレンズがフォーカス群とされている。ただし、フォーカシングに際しては第2レンズ群G2内の空気間隔を隔てて前後する複数のレンズを異なる移動比で移動させても良い。





図22には、実施例5に係る広角レンズ5の無限遠合焦時における縦収差を示す。図23には、実施例5に係る広角レンズ5の近距離合焦時における縦収差を示す。図24には、実施例5に係る広角レンズ5の無限遠合焦時における横収差を示す。図25には、実施例5に係る広角レンズ5の近距離合焦時における横収差を示す。
実施例5に係る広角レンズ5は、以上の構成により、Fナンバー1.4程度の大口径を実現しつつ小型化を実現している。また、各収差図から分かるように、実施例5に係る広角レンズ5は、諸収差が良好に補正され、優れた結像性能を有している。
[各実施例のその他の数値データ]
[表26]には、上述の各条件式に関する値を、各実施例についてまとめたものを示す。[表26]から分かるように、各条件式について、各実施例の値がその数値範囲内となっている。
[表26]には、上述の各条件式に関する値を、各実施例についてまとめたものを示す。[表26]から分かるように、各条件式について、各実施例の値がその数値範囲内となっている。

<5.応用例>
[5.1 第1の応用例]
本開示に係る技術は、様々な製品へ応用することができる。例えば、本開示に係る技術は、自動車、電気自動車、ハイブリッド電気自動車、自動二輪車、自転車、パーソナルモビリティ、飛行機、ドローン、船舶、ロボット、建設機械、農業機械(トラクター)などのいずれかの種類の移動体に搭載される装置として実現されてもよい。
[5.1 第1の応用例]
本開示に係る技術は、様々な製品へ応用することができる。例えば、本開示に係る技術は、自動車、電気自動車、ハイブリッド電気自動車、自動二輪車、自転車、パーソナルモビリティ、飛行機、ドローン、船舶、ロボット、建設機械、農業機械(トラクター)などのいずれかの種類の移動体に搭載される装置として実現されてもよい。
図27は、本開示に係る技術が適用され得る移動体制御システムの一例である車両制御システム7000の概略的な構成例を示すブロック図である。車両制御システム7000は、通信ネットワーク7010を介して接続された複数の電子制御ユニットを備える。図27に示した例では、車両制御システム7000は、駆動系制御ユニット7100、ボディ系制御ユニット7200、バッテリ制御ユニット7300、車外情報検出ユニット7400、車内情報検出ユニット7500、及び統合制御ユニット7600を備える。これらの複数の制御ユニットを接続する通信ネットワーク7010は、例えば、CAN(Controller Area Network)、LIN(Local Interconnect Network)、LAN(Local Area Network)又はFlexRay(登録商標)等の任意の規格に準拠した車載通信ネットワークであってよい。
各制御ユニットは、各種プログラムにしたがって演算処理を行うマイクロコンピュータと、マイクロコンピュータにより実行されるプログラム又は各種演算に用いられるパラメータ等を記憶する記憶部と、各種制御対象の装置を駆動する駆動回路とを備える。各制御ユニットは、通信ネットワーク7010を介して他の制御ユニットとの間で通信を行うためのネットワークI/Fを備えるとともに、車内外の装置又はセンサ等との間で、有線通信又は無線通信により通信を行うための通信I/Fを備える。図27では、統合制御ユニット7600の機能構成として、マイクロコンピュータ7610、汎用通信I/F7620、専用通信I/F7630、測位部7640、ビーコン受信部7650、車内機器I/F7660、音声画像出力部7670、車載ネットワークI/F7680及び記憶部7690が図示されている。他の制御ユニットも同様に、マイクロコンピュータ、通信I/F及び記憶部等を備える。
駆動系制御ユニット7100は、各種プログラムにしたがって車両の駆動系に関連する装置の動作を制御する。例えば、駆動系制御ユニット7100は、内燃機関又は駆動用モータ等の車両の駆動力を発生させるための駆動力発生装置、駆動力を車輪に伝達するための駆動力伝達機構、車両の舵角を調節するステアリング機構、及び、車両の制動力を発生させる制動装置等の制御装置として機能する。駆動系制御ユニット7100は、ABS(Antilock Brake System)又はESC(Electronic Stability Control)等の制御装置としての機能を有してもよい。
駆動系制御ユニット7100には、車両状態検出部7110が接続される。車両状態検出部7110には、例えば、車体の軸回転運動の角速度を検出するジャイロセンサ、車両の加速度を検出する加速度センサ、あるいは、アクセルペダルの操作量、ブレーキペダルの操作量、ステアリングホイールの操舵角、エンジン回転数又は車輪の回転速度等を検出するためのセンサのうちの少なくとも一つが含まれる。駆動系制御ユニット7100は、車両状態検出部7110から入力される信号を用いて演算処理を行い、内燃機関、駆動用モータ、電動パワーステアリング装置又はブレーキ装置等を制御する。
ボディ系制御ユニット7200は、各種プログラムにしたがって車体に装備された各種装置の動作を制御する。例えば、ボディ系制御ユニット7200は、キーレスエントリシステム、スマートキーシステム、パワーウィンドウ装置、あるいは、ヘッドランプ、バックランプ、ブレーキランプ、ウィンカー又はフォグランプ等の各種ランプの制御装置として機能する。この場合、ボディ系制御ユニット7200には、鍵を代替する携帯機から発信される電波又は各種スイッチの信号が入力され得る。ボディ系制御ユニット7200は、これらの電波又は信号の入力を受け付け、車両のドアロック装置、パワーウィンドウ装置、ランプ等を制御する。
バッテリ制御ユニット7300は、各種プログラムにしたがって駆動用モータの電力供給源である二次電池7310を制御する。例えば、バッテリ制御ユニット7300には、二次電池7310を備えたバッテリ装置から、バッテリ温度、バッテリ出力電圧又はバッテリの残存容量等の情報が入力される。バッテリ制御ユニット7300は、これらの信号を用いて演算処理を行い、二次電池7310の温度調節制御又はバッテリ装置に備えられた冷却装置等の制御を行う。
車外情報検出ユニット7400は、車両制御システム7000を搭載した車両の外部の情報を検出する。例えば、車外情報検出ユニット7400には、撮像部7410及び車外情報検出部7420のうちの少なくとも一方が接続される。撮像部7410には、ToF(Time Of Flight)カメラ、ステレオカメラ、単眼カメラ、赤外線カメラ及びその他のカメラのうちの少なくとも一つが含まれる。車外情報検出部7420には、例えば、現在の天候又は気象を検出するための環境センサ、あるいは、車両制御システム7000を搭載した車両の周囲の他の車両、障害物又は歩行者等を検出するための周囲情報検出センサのうちの少なくとも一つが含まれる。
環境センサは、例えば、雨天を検出する雨滴センサ、霧を検出する霧センサ、日照度合いを検出する日照センサ、及び降雪を検出する雪センサのうちの少なくとも一つであってよい。周囲情報検出センサは、超音波センサ、レーダ装置及びLIDAR(Light Detection and Ranging、Laser Imaging Detection and Ranging)装置のうちの少なくとも一つであってよい。これらの撮像部7410及び車外情報検出部7420は、それぞれ独立したセンサないし装置として備えられてもよいし、複数のセンサないし装置が統合された装置として備えられてもよい。
ここで、図28は、撮像部7410及び車外情報検出部7420の設置位置の例を示す。撮像部7910,7912,7914,7916,7918は、例えば、車両7900のフロントノーズ、サイドミラー、リアバンパ、バックドア及び車室内のフロントガラスの上部のうちの少なくとも一つの位置に設けられる。フロントノーズに備えられる撮像部7910及び車室内のフロントガラスの上部に備えられる撮像部7918は、主として車両7900の前方の画像を取得する。サイドミラーに備えられる撮像部7912,7914は、主として車両7900の側方の画像を取得する。リアバンパ又はバックドアに備えられる撮像部7916は、主として車両7900の後方の画像を取得する。車室内のフロントガラスの上部に備えられる撮像部7918は、主として先行車両又は、歩行者、障害物、信号機、交通標識又は車線等の検出に用いられる。
なお、図28には、それぞれの撮像部7910,7912,7914,7916の撮影範囲の一例が示されている。撮像範囲aは、フロントノーズに設けられた撮像部7910の撮像範囲を示し、撮像範囲b,cは、それぞれサイドミラーに設けられた撮像部7912,7914の撮像範囲を示し、撮像範囲dは、リアバンパ又はバックドアに設けられた撮像部7916の撮像範囲を示す。例えば、撮像部7910,7912,7914,7916で撮像された画像データが重ね合わせられることにより、車両7900を上方から見た俯瞰画像が得られる。
車両7900のフロント、リア、サイド、コーナ及び車室内のフロントガラスの上部に設けられる車外情報検出部7920,7922,7924,7926,7928,7930は、例えば超音波センサ又はレーダ装置であってよい。車両7900のフロントノーズ、リアバンパ、バックドア及び車室内のフロントガラスの上部に設けられる車外情報検出部7920,7926,7930は、例えばLIDAR装置であってよい。これらの車外情報検出部7920~7930は、主として先行車両、歩行者又は障害物等の検出に用いられる。
図27に戻って説明を続ける。車外情報検出ユニット7400は、撮像部7410に車外の画像を撮像させるとともに、撮像された画像データを受信する。また、車外情報検出ユニット7400は、接続されている車外情報検出部7420から検出情報を受信する。車外情報検出部7420が超音波センサ、レーダ装置又はLIDAR装置である場合には、車外情報検出ユニット7400は、超音波又は電磁波等を発信させるとともに、受信された反射波の情報を受信する。車外情報検出ユニット7400は、受信した情報に基づいて、人、車、障害物、標識又は路面上の文字等の物体検出処理又は距離検出処理を行ってもよい。車外情報検出ユニット7400は、受信した情報に基づいて、降雨、霧又は路面状況等を認識する環境認識処理を行ってもよい。車外情報検出ユニット7400は、受信した情報に基づいて、車外の物体までの距離を算出してもよい。
また、車外情報検出ユニット7400は、受信した画像データに基づいて、人、車、障害物、標識又は路面上の文字等を認識する画像認識処理又は距離検出処理を行ってもよい。車外情報検出ユニット7400は、受信した画像データに対して歪補正又は位置合わせ等の処理を行うとともに、異なる撮像部7410により撮像された画像データを合成して、俯瞰画像又はパノラマ画像を生成してもよい。車外情報検出ユニット7400は、異なる撮像部7410により撮像された画像データを用いて、視点変換処理を行ってもよい。
車内情報検出ユニット7500は、車内の情報を検出する。車内情報検出ユニット7500には、例えば、運転者の状態を検出する運転者状態検出部7510が接続される。運転者状態検出部7510は、運転者を撮像するカメラ、運転者の生体情報を検出する生体センサ又は車室内の音声を集音するマイク等を含んでもよい。生体センサは、例えば、座面又はステアリングホイール等に設けられ、座席に座った搭乗者又はステアリングホイールを握る運転者の生体情報を検出する。車内情報検出ユニット7500は、運転者状態検出部7510から入力される検出情報に基づいて、運転者の疲労度合い又は集中度合いを算出してもよいし、運転者が居眠りをしていないかを判別してもよい。車内情報検出ユニット7500は、集音された音声信号に対してノイズキャンセリング処理等の処理を行ってもよい。
統合制御ユニット7600は、各種プログラムにしたがって車両制御システム7000内の動作全般を制御する。統合制御ユニット7600には、入力部7800が接続されている。入力部7800は、例えば、タッチパネル、ボタン、マイクロフォン、スイッチ又はレバー等、搭乗者によって入力操作され得る装置によって実現される。統合制御ユニット7600には、マイクロフォンにより入力される音声を音声認識することにより得たデータが入力されてもよい。入力部7800は、例えば、赤外線又はその他の電波を利用したリモートコントロール装置であってもよいし、車両制御システム7000の操作に対応した携帯電話又はPDA(Personal Digital Assistant)等の外部接続機器であってもよい。入力部7800は、例えばカメラであってもよく、その場合搭乗者はジェスチャにより情報を入力することができる。あるいは、搭乗者が装着したウェアラブル装置の動きを検出することで得られたデータが入力されてもよい。さらに、入力部7800は、例えば、上記の入力部7800を用いて搭乗者等により入力された情報に基づいて入力信号を生成し、統合制御ユニット7600に出力する入力制御回路などを含んでもよい。搭乗者等は、この入力部7800を操作することにより、車両制御システム7000に対して各種のデータを入力したり処理動作を指示したりする。
記憶部7690は、マイクロコンピュータにより実行される各種プログラムを記憶するROM(Read Only Memory)、及び各種パラメータ、演算結果又はセンサ値等を記憶するRAM(Random Access Memory)を含んでいてもよい。また、記憶部7690は、HDD(Hard Disc Drive)等の磁気記憶デバイス、半導体記憶デバイス、光記憶デバイス又は光磁気記憶デバイス等によって実現してもよい。
汎用通信I/F7620は、外部環境7750に存在する様々な機器との間の通信を仲介する汎用的な通信I/Fである。汎用通信I/F7620は、GSM(登録商標)(Global System of Mobile communications)、WiMAX(登録商標)、LTE(登録商標)(Long Term Evolution)若しくはLTE-A(LTE-Advanced)などのセルラー通信プロトコル、又は無線LAN(Wi-Fi(登録商標)ともいう)、Bluetooth(登録商標)などのその他の無線通信プロトコルを実装してよい。汎用通信I/F7620は、例えば、基地局又はアクセスポイントを介して、外部ネットワーク(例えば、インターネット、クラウドネットワーク又は事業者固有のネットワーク)上に存在する機器(例えば、アプリケーションサーバ又は制御サーバ)へ接続してもよい。また、汎用通信I/F7620は、例えばP2P(Peer To Peer)技術を用いて、車両の近傍に存在する端末(例えば、運転者、歩行者若しくは店舗の端末、又はMTC(Machine Type Communication)端末)と接続してもよい。
専用通信I/F7630は、車両における使用を目的として策定された通信プロトコルをサポートする通信I/Fである。専用通信I/F7630は、例えば、下位レイヤのIEEE802.11pと上位レイヤのIEEE1609との組合せであるWAVE(Wireless Access in Vehicle Environment)、DSRC(Dedicated Short Range Communications)、又はセルラー通信プロトコルといった標準プロトコルを実装してよい。専用通信I/F7630は、典型的には、車車間(Vehicle to Vehicle)通信、路車間(Vehicle to Infrastructure)通信、車両と家との間(Vehicle to Home)の通信及び歩車間(Vehicle to Pedestrian)通信のうちの1つ以上を含む概念であるV2X通信を遂行する。
測位部7640は、例えば、GNSS(Global Navigation Satellite System)衛星からのGNSS信号(例えば、GPS(Global Positioning System)衛星からのGPS信号)を受信して測位を実行し、車両の緯度、経度及び高度を含む位置情報を生成する。なお、測位部7640は、無線アクセスポイントとの信号の交換により現在位置を特定してもよく、又は測位機能を有する携帯電話、PHS若しくはスマートフォンといった端末から位置情報を取得してもよい。
ビーコン受信部7650は、例えば、道路上に設置された無線局等から発信される電波あるいは電磁波を受信し、現在位置、渋滞、通行止め又は所要時間等の情報を取得する。なお、ビーコン受信部7650の機能は、上述した専用通信I/F7630に含まれてもよい。
車内機器I/F7660は、マイクロコンピュータ7610と車内に存在する様々な車内機器7760との間の接続を仲介する通信インタフェースである。車内機器I/F7660は、無線LAN、Bluetooth(登録商標)、NFC(Near Field Communication)又はWUSB(Wireless USB)といった無線通信プロトコルを用いて無線接続を確立してもよい。また、車内機器I/F7660は、図示しない接続端子(及び、必要であればケーブル)を介して、USB(Universal Serial Bus)、HDMI(登録商標)(High-Definition Multimedia Interface)、又はMHL(Mobile High-definition Link)等の有線接続を確立してもよい。車内機器7760は、例えば、搭乗者が有するモバイル機器若しくはウェアラブル機器、又は車両に搬入され若しくは取り付けられる情報機器のうちの少なくとも1つを含んでいてもよい。また、車内機器7760は、任意の目的地までの経路探索を行うナビゲーション装置を含んでいてもよい。車内機器I/F7660は、これらの車内機器7760との間で、制御信号又はデータ信号を交換する。
車載ネットワークI/F7680は、マイクロコンピュータ7610と通信ネットワーク7010との間の通信を仲介するインタフェースである。車載ネットワークI/F7680は、通信ネットワーク7010によりサポートされる所定のプロトコルに則して、信号等を送受信する。
統合制御ユニット7600のマイクロコンピュータ7610は、汎用通信I/F7620、専用通信I/F7630、測位部7640、ビーコン受信部7650、車内機器I/F7660及び車載ネットワークI/F7680のうちの少なくとも一つを介して取得される情報に基づき、各種プログラムにしたがって、車両制御システム7000を制御する。例えば、マイクロコンピュータ7610は、取得される車内外の情報に基づいて、駆動力発生装置、ステアリング機構又は制動装置の制御目標値を演算し、駆動系制御ユニット7100に対して制御指令を出力してもよい。例えば、マイクロコンピュータ7610は、車両の衝突回避あるいは衝撃緩和、車間距離に基づく追従走行、車速維持走行、車両の衝突警告、又は車両のレーン逸脱警告等を含むADAS(Advanced Driver Assistance System)の機能実現を目的とした協調制御を行ってもよい。また、マイクロコンピュータ7610は、取得される車両の周囲の情報に基づいて駆動力発生装置、ステアリング機構又は制動装置等を制御することにより、運転者の操作に拠らずに自律的に走行する自動運転等を目的とした協調制御を行ってもよい。
マイクロコンピュータ7610は、汎用通信I/F7620、専用通信I/F7630、測位部7640、ビーコン受信部7650、車内機器I/F7660及び車載ネットワークI/F7680のうちの少なくとも一つを介して取得される情報に基づき、車両と周辺の構造物や人物等の物体との間の3次元距離情報を生成し、車両の現在位置の周辺情報を含むローカル地図情報を作成してもよい。また、マイクロコンピュータ7610は、取得される情報に基づき、車両の衝突、歩行者等の近接又は通行止めの道路への進入等の危険を予測し、警告用信号を生成してもよい。警告用信号は、例えば、警告音を発生させたり、警告ランプを点灯させたりするための信号であってよい。
音声画像出力部7670は、車両の搭乗者又は車外に対して、視覚的又は聴覚的に情報を通知することが可能な出力装置へ音声及び画像のうちの少なくとも一方の出力信号を送信する。図27の例では、出力装置として、オーディオスピーカ7710、表示部7720及びインストルメントパネル7730が例示されている。表示部7720は、例えば、オンボードディスプレイ及びヘッドアップディスプレイの少なくとも一つを含んでいてもよい。表示部7720は、AR(Augmented Reality)表示機能を有していてもよい。出力装置は、これらの装置以外の、ヘッドホン、搭乗者が装着する眼鏡型ディスプレイ等のウェアラブルデバイス、プロジェクタ又はランプ等の他の装置であってもよい。出力装置が表示装置の場合、表示装置は、マイクロコンピュータ7610が行った各種処理により得られた結果又は他の制御ユニットから受信された情報を、テキスト、イメージ、表、グラフ等、様々な形式で視覚的に表示する。また、出力装置が音声出力装置の場合、音声出力装置は、再生された音声データ又は音響データ等からなるオーディオ信号をアナログ信号に変換して聴覚的に出力する。
なお、図27に示した例において、通信ネットワーク7010を介して接続された少なくとも二つの制御ユニットが一つの制御ユニットとして一体化されてもよい。あるいは、個々の制御ユニットが、複数の制御ユニットにより構成されてもよい。さらに、車両制御システム7000が、図示されていない別の制御ユニットを備えてもよい。また、上記の説明において、いずれかの制御ユニットが担う機能の一部又は全部を、他の制御ユニットに持たせてもよい。つまり、通信ネットワーク7010を介して情報の送受信がされるようになっていれば、所定の演算処理が、いずれかの制御ユニットで行われるようになってもよい。同様に、いずれかの制御ユニットに接続されているセンサ又は装置が、他の制御ユニットに接続されるとともに、複数の制御ユニットが、通信ネットワーク7010を介して相互に検出情報を送受信してもよい。
以上説明した車両制御システム7000において、本開示の広角レンズ、および撮像装置は、撮像部7410、および撮像部7910,7912,7914,7916,7918に適用することができる。
[5.2 第2の応用例]
本開示に係る技術は、内視鏡手術システムに適用されてもよい。
本開示に係る技術は、内視鏡手術システムに適用されてもよい。
図29は、本開示に係る技術が適用され得る内視鏡手術システム5000の概略的な構成の一例を示す図である。図29では、術者(医師)5067が、内視鏡手術システム5000を用いて、患者ベッド5069上の患者5071に手術を行っている様子が図示されている。図示するように、内視鏡手術システム5000は、内視鏡5001と、その他の術具5017と、内視鏡5001を支持する支持アーム装置5027と、内視鏡下手術のための各種の装置が搭載されたカート5037と、から構成される。
内視鏡手術では、腹壁を切って開腹する代わりに、トロッカ5025a~5025dと呼ばれる筒状の開孔器具が腹壁に複数穿刺される。そして、トロッカ5025a~5025dから、内視鏡5001の鏡筒5003や、その他の術具5017が患者5071の体腔内に挿入される。図示する例では、その他の術具5017として、気腹チューブ5019、エネルギー処置具5021及び鉗子5023が、患者5071の体腔内に挿入されている。また、エネルギー処置具5021は、高周波電流や超音波振動により、組織の切開及び剥離、又は血管の封止等を行う処置具である。ただし、図示する術具5017はあくまで一例であり、術具5017としては、例えば攝子、レトラクタ等、一般的に内視鏡下手術において用いられる各種の術具が用いられてよい。
内視鏡5001によって撮影された患者5071の体腔内の術部の画像が、表示装置5041に表示される。術者5067は、表示装置5041に表示された術部の画像をリアルタイムで見ながら、エネルギー処置具5021や鉗子5023を用いて、例えば患部を切除する等の処置を行う。なお、図示は省略しているが、気腹チューブ5019、エネルギー処置具5021及び鉗子5023は、手術中に、術者5067又は助手等によって支持される。
(支持アーム装置)
支持アーム装置5027は、ベース部5029から延伸するアーム部5031を備える。図示する例では、アーム部5031は、関節部5033a、5033b、5033c、及びリンク5035a、5035bから構成されており、アーム制御装置5045からの制御により駆動される。アーム部5031によって内視鏡5001が支持され、その位置及び姿勢が制御される。これにより、内視鏡5001の安定的な位置の固定が実現され得る。
支持アーム装置5027は、ベース部5029から延伸するアーム部5031を備える。図示する例では、アーム部5031は、関節部5033a、5033b、5033c、及びリンク5035a、5035bから構成されており、アーム制御装置5045からの制御により駆動される。アーム部5031によって内視鏡5001が支持され、その位置及び姿勢が制御される。これにより、内視鏡5001の安定的な位置の固定が実現され得る。
(内視鏡)
内視鏡5001は、先端から所定の長さの領域が患者5071の体腔内に挿入される鏡筒5003と、鏡筒5003の基端に接続されるカメラヘッド5005と、から構成される。図示する例では、硬性の鏡筒5003を有するいわゆる硬性鏡として構成される内視鏡5001を図示しているが、内視鏡5001は、軟性の鏡筒5003を有するいわゆる軟性鏡として構成されてもよい。
内視鏡5001は、先端から所定の長さの領域が患者5071の体腔内に挿入される鏡筒5003と、鏡筒5003の基端に接続されるカメラヘッド5005と、から構成される。図示する例では、硬性の鏡筒5003を有するいわゆる硬性鏡として構成される内視鏡5001を図示しているが、内視鏡5001は、軟性の鏡筒5003を有するいわゆる軟性鏡として構成されてもよい。
鏡筒5003の先端には、対物レンズが嵌め込まれた開口部が設けられている。内視鏡5001には光源装置5043が接続されており、当該光源装置5043によって生成された光が、鏡筒5003の内部に延設されるライトガイドによって当該鏡筒の先端まで導光され、対物レンズを介して患者5071の体腔内の観察対象に向かって照射される。なお、内視鏡5001は、直視鏡であってもよいし、斜視鏡又は側視鏡であってもよい。
カメラヘッド5005の内部には光学系及び撮像素子が設けられており、観察対象からの反射光(観察光)は当該光学系によって当該撮像素子に集光される。当該撮像素子によって観察光が光電変換され、観察光に対応する電気信号、すなわち観察像に対応する画像信号が生成される。当該画像信号は、RAWデータとしてカメラコントロールユニット(CCU:Camera Control Unit)5039に送信される。なお、カメラヘッド5005には、その光学系を適宜駆動させることにより、倍率及び焦点距離を調整する機能が搭載される。
なお、例えば立体視(3D表示)等に対応するために、カメラヘッド5005には撮像素子が複数設けられてもよい。この場合、鏡筒5003の内部には、当該複数の撮像素子のそれぞれに観察光を導光するために、リレー光学系が複数系統設けられる。
(カートに搭載される各種の装置)
CCU5039は、CPU(Central Processing Unit)やGPU(Graphics Processing Unit)等によって構成され、内視鏡5001及び表示装置5041の動作を統括的に制御する。具体的には、CCU5039は、カメラヘッド5005から受け取った画像信号に対して、例えば現像処理(デモザイク処理)等の、当該画像信号に基づく画像を表示するための各種の画像処理を施す。CCU5039は、当該画像処理を施した画像信号を表示装置5041に提供する。また、CCU5039は、カメラヘッド5005に対して制御信号を送信し、その駆動を制御する。当該制御信号には、倍率や焦点距離等、撮像条件に関する情報が含まれ得る。
CCU5039は、CPU(Central Processing Unit)やGPU(Graphics Processing Unit)等によって構成され、内視鏡5001及び表示装置5041の動作を統括的に制御する。具体的には、CCU5039は、カメラヘッド5005から受け取った画像信号に対して、例えば現像処理(デモザイク処理)等の、当該画像信号に基づく画像を表示するための各種の画像処理を施す。CCU5039は、当該画像処理を施した画像信号を表示装置5041に提供する。また、CCU5039は、カメラヘッド5005に対して制御信号を送信し、その駆動を制御する。当該制御信号には、倍率や焦点距離等、撮像条件に関する情報が含まれ得る。
表示装置5041は、CCU5039からの制御により、当該CCU5039によって画像処理が施された画像信号に基づく画像を表示する。内視鏡5001が例えば4K(水平画素数3840×垂直画素数2160)又は8K(水平画素数7680×垂直画素数4320)等の高解像度の撮影に対応したものである場合、及び/又は3D表示に対応したものである場合には、表示装置5041としては、それぞれに対応して、高解像度の表示が可能なもの、及び/又は3D表示可能なものが用いられ得る。4K又は8K等の高解像度の撮影に対応したものである場合、表示装置5041として55インチ以上のサイズのものを用いることで一層の没入感が得られる。また、用途に応じて、解像度、サイズが異なる複数の表示装置5041が設けられてもよい。
光源装置5043は、例えばLED(light emitting diode)等の光源から構成され、術部を撮影する際の照射光を内視鏡5001に供給する。
アーム制御装置5045は、例えばCPU等のプロセッサによって構成され、所定のプログラムに従って動作することにより、所定の制御方式に従って支持アーム装置5027のアーム部5031の駆動を制御する。
入力装置5047は、内視鏡手術システム5000に対する入力インタフェースである。ユーザは、入力装置5047を介して、内視鏡手術システム5000に対して各種の情報の入力や指示入力を行うことができる。例えば、ユーザは、入力装置5047を介して、患者の身体情報や、手術の術式についての情報等、手術に関する各種の情報を入力する。また、例えば、ユーザは、入力装置5047を介して、アーム部5031を駆動させる旨の指示や、内視鏡5001による撮像条件(照射光の種類、倍率及び焦点距離等)を変更する旨の指示、エネルギー処置具5021を駆動させる旨の指示等を入力する。
入力装置5047の種類は限定されず、入力装置5047は各種の公知の入力装置であってよい。入力装置5047としては、例えば、マウス、キーボード、タッチパネル、スイッチ、フットスイッチ5057及び/又はレバー等が適用され得る。入力装置5047としてタッチパネルが用いられる場合には、当該タッチパネルは表示装置5041の表示面上に設けられてもよい。
あるいは、入力装置5047は、例えばメガネ型のウェアラブルデバイスやHMD(Head Mounted Display)等の、ユーザによって装着されるデバイスであり、これらのデバイスによって検出されるユーザのジェスチャや視線に応じて各種の入力が行われる。また、入力装置5047は、ユーザの動きを検出可能なカメラを含み、当該カメラによって撮像された映像から検出されるユーザのジェスチャや視線に応じて各種の入力が行われる。更に、入力装置5047は、ユーザの声を収音可能なマイクロフォンを含み、当該マイクロフォンを介して音声によって各種の入力が行われる。このように、入力装置5047が非接触で各種の情報を入力可能に構成されることにより、特に清潔域に属するユーザ(例えば術者5067)が、不潔域に属する機器を非接触で操作することが可能となる。また、ユーザは、所持している術具から手を離すことなく機器を操作することが可能となるため、ユーザの利便性が向上する。
処置具制御装置5049は、組織の焼灼、切開又は血管の封止等のためのエネルギー処置具5021の駆動を制御する。気腹装置5051は、内視鏡5001による視野の確保及び術者の作業空間の確保の目的で、患者5071の体腔を膨らめるために、気腹チューブ5019を介して当該体腔内にガスを送り込む。レコーダ5053は、手術に関する各種の情報を記録可能な装置である。プリンタ5055は、手術に関する各種の情報を、テキスト、画像又はグラフ等各種の形式で印刷可能な装置である。
以下、内視鏡手術システム5000において特に特徴的な構成について、更に詳細に説明する。
(支持アーム装置)
支持アーム装置5027は、基台であるベース部5029と、ベース部5029から延伸するアーム部5031と、を備える。図示する例では、アーム部5031は、複数の関節部5033a、5033b、5033cと、関節部5033bによって連結される複数のリンク5035a、5035bと、から構成されているが、図29では、簡単のため、アーム部5031の構成を簡略化して図示している。実際には、アーム部5031が所望の自由度を有するように、関節部5033a~5033c及びリンク5035a、5035bの形状、数及び配置、並びに関節部5033a~5033cの回転軸の方向等が適宜設定され得る。例えば、アーム部5031は、好適に、6自由度以上の自由度を有するように構成され得る。これにより、アーム部5031の可動範囲内において内視鏡5001を自由に移動させることが可能になるため、所望の方向から内視鏡5001の鏡筒5003を患者5071の体腔内に挿入することが可能になる。
支持アーム装置5027は、基台であるベース部5029と、ベース部5029から延伸するアーム部5031と、を備える。図示する例では、アーム部5031は、複数の関節部5033a、5033b、5033cと、関節部5033bによって連結される複数のリンク5035a、5035bと、から構成されているが、図29では、簡単のため、アーム部5031の構成を簡略化して図示している。実際には、アーム部5031が所望の自由度を有するように、関節部5033a~5033c及びリンク5035a、5035bの形状、数及び配置、並びに関節部5033a~5033cの回転軸の方向等が適宜設定され得る。例えば、アーム部5031は、好適に、6自由度以上の自由度を有するように構成され得る。これにより、アーム部5031の可動範囲内において内視鏡5001を自由に移動させることが可能になるため、所望の方向から内視鏡5001の鏡筒5003を患者5071の体腔内に挿入することが可能になる。
関節部5033a~5033cにはアクチュエータが設けられており、関節部5033a~5033cは当該アクチュエータの駆動により所定の回転軸まわりに回転可能に構成されている。当該アクチュエータの駆動がアーム制御装置5045によって制御されることにより、各関節部5033a~5033cの回転角度が制御され、アーム部5031の駆動が制御される。これにより、内視鏡5001の位置及び姿勢の制御が実現され得る。この際、アーム制御装置5045は、力制御又は位置制御等、各種の公知の制御方式によってアーム部5031の駆動を制御することができる。
例えば、術者5067が、入力装置5047(フットスイッチ5057を含む)を介して適宜操作入力を行うことにより、当該操作入力に応じてアーム制御装置5045によってアーム部5031の駆動が適宜制御され、内視鏡5001の位置及び姿勢が制御されてよい。当該制御により、アーム部5031の先端の内視鏡5001を任意の位置から任意の位置まで移動させた後、その移動後の位置で固定的に支持することができる。なお、アーム部5031は、いわゆるマスタースレイブ方式で操作されてもよい。この場合、アーム部5031は、手術室から離れた場所に設置される入力装置5047を介してユーザによって遠隔操作され得る。
また、力制御が適用される場合には、アーム制御装置5045は、ユーザからの外力を受け、その外力にならってスムーズにアーム部5031が移動するように、各関節部5033a~5033cのアクチュエータを駆動させる、いわゆるパワーアシスト制御を行ってもよい。これにより、ユーザが直接アーム部5031に触れながらアーム部5031を移動させる際に、比較的軽い力で当該アーム部5031を移動させることができる。従って、より直感的に、より簡易な操作で内視鏡5001を移動させることが可能となり、ユーザの利便性を向上させることができる。
ここで、一般的に、内視鏡下手術では、スコピストと呼ばれる医師によって内視鏡5001が支持されていた。これに対して、支持アーム装置5027を用いることにより、人手によらずに内視鏡5001の位置をより確実に固定することが可能になるため、術部の画像を安定的に得ることができ、手術を円滑に行うことが可能になる。
なお、アーム制御装置5045は必ずしもカート5037に設けられなくてもよい。また、アーム制御装置5045は必ずしも1つの装置でなくてもよい。例えば、アーム制御装置5045は、支持アーム装置5027のアーム部5031の各関節部5033a~5033cにそれぞれ設けられてもよく、複数のアーム制御装置5045が互いに協働することにより、アーム部5031の駆動制御が実現されてもよい。
(光源装置)
光源装置5043は、内視鏡5001に術部を撮影する際の照射光を供給する。光源装置5043は、例えばLED、レーザ光源又はこれらの組み合わせによって構成される白色光源から構成される。このとき、RGBレーザ光源の組み合わせにより白色光源が構成される場合には、各色(各波長)の出力強度及び出力タイミングを高精度に制御することができるため、光源装置5043において撮像画像のホワイトバランスの調整を行うことができる。また、この場合には、RGBレーザ光源それぞれからのレーザ光を時分割で観察対象に照射し、その照射タイミングに同期してカメラヘッド5005の撮像素子の駆動を制御することにより、RGBそれぞれに対応した画像を時分割で撮像することも可能である。当該方法によれば、当該撮像素子にカラーフィルタを設けなくても、カラー画像を得ることができる。
光源装置5043は、内視鏡5001に術部を撮影する際の照射光を供給する。光源装置5043は、例えばLED、レーザ光源又はこれらの組み合わせによって構成される白色光源から構成される。このとき、RGBレーザ光源の組み合わせにより白色光源が構成される場合には、各色(各波長)の出力強度及び出力タイミングを高精度に制御することができるため、光源装置5043において撮像画像のホワイトバランスの調整を行うことができる。また、この場合には、RGBレーザ光源それぞれからのレーザ光を時分割で観察対象に照射し、その照射タイミングに同期してカメラヘッド5005の撮像素子の駆動を制御することにより、RGBそれぞれに対応した画像を時分割で撮像することも可能である。当該方法によれば、当該撮像素子にカラーフィルタを設けなくても、カラー画像を得ることができる。
また、光源装置5043は、出力する光の強度を所定の時間ごとに変更するようにその駆動が制御されてもよい。その光の強度の変更のタイミングに同期してカメラヘッド5005の撮像素子の駆動を制御して時分割で画像を取得し、その画像を合成することにより、いわゆる黒つぶれ及び白とびのない高ダイナミックレンジの画像を生成することができる。
また、光源装置5043は、特殊光観察に対応した所定の波長帯域の光を供給可能に構成されてもよい。特殊光観察では、例えば、体組織における光の吸収の波長依存性を利用して、通常の観察時における照射光(すなわち、白色光)に比べて狭帯域の光を照射することにより、粘膜表層の血管等の所定の組織を高コントラストで撮影する、いわゆる狭帯域光観察(Narrow Band Imaging)が行われる。あるいは、特殊光観察では、励起光を照射することにより発生する蛍光により画像を得る蛍光観察が行われてもよい。蛍光観察では、体組織に励起光を照射し当該体組織からの蛍光を観察するもの(自家蛍光観察)、又はインドシアニングリーン(ICG)等の試薬を体組織に局注するとともに当該体組織にその試薬の蛍光波長に対応した励起光を照射し蛍光像を得るもの等が行われ得る。光源装置5043は、このような特殊光観察に対応した狭帯域光及び/又は励起光を供給可能に構成され得る。
(カメラヘッド及びCCU)
図30を参照して、内視鏡5001のカメラヘッド5005及びCCU5039の機能についてより詳細に説明する。図30は、図29に示すカメラヘッド5005及びCCU5039の機能構成の一例を示すブロック図である。
図30を参照して、内視鏡5001のカメラヘッド5005及びCCU5039の機能についてより詳細に説明する。図30は、図29に示すカメラヘッド5005及びCCU5039の機能構成の一例を示すブロック図である。
図30を参照すると、カメラヘッド5005は、その機能として、レンズユニット5007と、撮像部5009と、駆動部5011と、通信部5013と、カメラヘッド制御部5015と、を有する。また、CCU5039は、その機能として、通信部5059と、画像処理部5061と、制御部5063と、を有する。カメラヘッド5005とCCU5039とは、伝送ケーブル5065によって双方向に通信可能に接続されている。
まず、カメラヘッド5005の機能構成について説明する。レンズユニット5007は、鏡筒5003との接続部に設けられる光学系である。鏡筒5003の先端から取り込まれた観察光は、カメラヘッド5005まで導光され、当該レンズユニット5007に入射する。レンズユニット5007は、ズームレンズ及びフォーカスレンズを含む複数のレンズが組み合わされて構成される。レンズユニット5007は、撮像部5009の撮像素子の受光面上に観察光を集光するように、その光学特性が調整されている。また、ズームレンズ及びフォーカスレンズは、撮像画像の倍率及び焦点の調整のため、その光軸上の位置が移動可能に構成される。
撮像部5009は撮像素子によって構成され、レンズユニット5007の後段に配置される。レンズユニット5007を通過した観察光は、当該撮像素子の受光面に集光され、光電変換によって、観察像に対応した画像信号が生成される。撮像部5009によって生成された画像信号は、通信部5013に提供される。
撮像部5009を構成する撮像素子としては、例えばCMOS(Complementary Metal Oxide Semiconductor)タイプのイメージセンサであり、Bayer配列を有するカラー撮影可能なものが用いられる。なお、当該撮像素子としては、例えば4K以上の高解像度の画像の撮影に対応可能なものが用いられてもよい。術部の画像が高解像度で得られることにより、術者5067は、当該術部の様子をより詳細に把握することができ、手術をより円滑に進行することが可能となる。
また、撮像部5009を構成する撮像素子は、3D表示に対応する右目用及び左目用の画像信号をそれぞれ取得するための1対の撮像素子を有するように構成される。3D表示が行われることにより、術者5067は術部における生体組織の奥行きをより正確に把握することが可能になる。なお、撮像部5009が多板式で構成される場合には、各撮像素子に対応して、レンズユニット5007も複数系統設けられる。
また、撮像部5009は、必ずしもカメラヘッド5005に設けられなくてもよい。例えば、撮像部5009は、鏡筒5003の内部に、対物レンズの直後に設けられてもよい。
駆動部5011は、アクチュエータによって構成され、カメラヘッド制御部5015からの制御により、レンズユニット5007のズームレンズ及びフォーカスレンズを光軸に沿って所定の距離だけ移動させる。これにより、撮像部5009による撮像画像の倍率及び焦点が適宜調整され得る。
通信部5013は、CCU5039との間で各種の情報を送受信するための通信装置によって構成される。通信部5013は、撮像部5009から得た画像信号をRAWデータとして伝送ケーブル5065を介してCCU5039に送信する。この際、術部の撮像画像を低レイテンシで表示するために、当該画像信号は光通信によって送信されることが好ましい。手術の際には、術者5067が撮像画像によって患部の状態を観察しながら手術を行うため、より安全で確実な手術のためには、術部の動画像が可能な限りリアルタイムに表示されることが求められるからである。光通信が行われる場合には、通信部5013には、電気信号を光信号に変換する光電変換モジュールが設けられる。画像信号は当該光電変換モジュールによって光信号に変換された後、伝送ケーブル5065を介してCCU5039に送信される。
また、通信部5013は、CCU5039から、カメラヘッド5005の駆動を制御するための制御信号を受信する。当該制御信号には、例えば、撮像画像のフレームレートを指定する旨の情報、撮像時の露出値を指定する旨の情報、並びに/又は撮像画像の倍率及び焦点を指定する旨の情報等、撮像条件に関する情報が含まれる。通信部5013は、受信した制御信号をカメラヘッド制御部5015に提供する。なお、CCU5039からの制御信号も、光通信によって伝送されてもよい。この場合、通信部5013には、光信号を電気信号に変換する光電変換モジュールが設けられ、制御信号は当該光電変換モジュールによって電気信号に変換された後、カメラヘッド制御部5015に提供される。
なお、上記のフレームレートや露出値、倍率、焦点等の撮像条件は、取得された画像信号に基づいてCCU5039の制御部5063によって自動的に設定される。つまり、いわゆるAE(Auto Exposure)機能、AF(Auto Focus)機能及びAWB(Auto White Balance)機能が内視鏡5001に搭載される。
カメラヘッド制御部5015は、通信部5013を介して受信したCCU5039からの制御信号に基づいて、カメラヘッド5005の駆動を制御する。例えば、カメラヘッド制御部5015は、撮像画像のフレームレートを指定する旨の情報及び/又は撮像時の露光を指定する旨の情報に基づいて、撮像部5009の撮像素子の駆動を制御する。また、例えば、カメラヘッド制御部5015は、撮像画像の倍率及び焦点を指定する旨の情報に基づいて、駆動部5011を介してレンズユニット5007のズームレンズ及びフォーカスレンズを適宜移動させる。カメラヘッド制御部5015は、更に、鏡筒5003やカメラヘッド5005を識別するための情報を記憶する機能を備えてもよい。
なお、レンズユニット5007や撮像部5009等の構成を、気密性及び防水性が高い密閉構造内に配置することで、カメラヘッド5005について、オートクレーブ滅菌処理に対する耐性を持たせることができる。
次に、CCU5039の機能構成について説明する。通信部5059は、カメラヘッド5005との間で各種の情報を送受信するための通信装置によって構成される。通信部5059は、カメラヘッド5005から、伝送ケーブル5065を介して送信される画像信号を受信する。この際、上記のように、当該画像信号は好適に光通信によって送信され得る。この場合、光通信に対応して、通信部5059には、光信号を電気信号に変換する光電変換モジュールが設けられる。通信部5059は、電気信号に変換した画像信号を画像処理部5061に提供する。
また、通信部5059は、カメラヘッド5005に対して、カメラヘッド5005の駆動を制御するための制御信号を送信する。当該制御信号も光通信によって送信されてよい。
画像処理部5061は、カメラヘッド5005から送信されたRAWデータである画像信号に対して各種の画像処理を施す。当該画像処理としては、例えば現像処理、高画質化処理(帯域強調処理、超解像処理、NR(Noise reduction)処理及び/又は手ブレ補正処理等)、並びに/又は拡大処理(電子ズーム処理)等、各種の公知の信号処理が含まれる。また、画像処理部5061は、AE、AF及びAWBを行うための、画像信号に対する検波処理を行う。
画像処理部5061は、CPUやGPU等のプロセッサによって構成され、当該プロセッサが所定のプログラムに従って動作することにより、上述した画像処理や検波処理が行われ得る。なお、画像処理部5061が複数のGPUによって構成される場合には、画像処理部5061は、画像信号に係る情報を適宜分割し、これら複数のGPUによって並列的に画像処理を行う。
制御部5063は、内視鏡5001による術部の撮像、及びその撮像画像の表示に関する各種の制御を行う。例えば、制御部5063は、カメラヘッド5005の駆動を制御するための制御信号を生成する。この際、撮像条件がユーザによって入力されている場合には、制御部5063は、当該ユーザによる入力に基づいて制御信号を生成する。あるいは、内視鏡5001にAE機能、AF機能及びAWB機能が搭載されている場合には、制御部5063は、画像処理部5061による検波処理の結果に応じて、最適な露出値、焦点距離及びホワイトバランスを適宜算出し、制御信号を生成する。
また、制御部5063は、画像処理部5061によって画像処理が施された画像信号に基づいて、術部の画像を表示装置5041に表示させる。この際、制御部5063は、各種の画像認識技術を用いて術部画像内における各種の物体を認識する。例えば、制御部5063は、術部画像に含まれる物体のエッジの形状や色等を検出することにより、鉗子等の術具、特定の生体部位、出血、エネルギー処置具5021使用時のミスト等を認識することができる。制御部5063は、表示装置5041に術部の画像を表示させる際に、その認識結果を用いて、各種の手術支援情報を当該術部の画像に重畳表示させる。手術支援情報が重畳表示され、術者5067に提示されることにより、より安全かつ確実に手術を進めることが可能になる。
カメラヘッド5005及びCCU5039を接続する伝送ケーブル5065は、電気信号の通信に対応した電気信号ケーブル、光通信に対応した光ファイバ、又はこれらの複合ケーブルである。
ここで、図示する例では、伝送ケーブル5065を用いて有線で通信が行われていたが、カメラヘッド5005とCCU5039との間の通信は無線で行われてもよい。両者の間の通信が無線で行われる場合には、伝送ケーブル5065を手術室内に敷設する必要がなくなるため、手術室内における医療スタッフの移動が当該伝送ケーブル5065によって妨げられる事態が解消され得る。
以上、本開示に係る技術が適用され得る内視鏡手術システム5000の一例について説明した。なお、ここでは、一例として内視鏡手術システム5000について説明したが、本開示に係る技術が適用され得るシステムはかかる例に限定されない。例えば、本開示に係る技術は、検査用軟性内視鏡システムや顕微鏡手術システムに適用されてもよい。
本開示に係る技術は、以上説明した構成のうち、カメラヘッド5005に好適に適用され得る。特に、本開示の広角レンズは、カメラヘッド5005のレンズユニット5007に好適に適用され得る。
<6.その他の実施の形態>
本開示による技術は、上記実施の形態および実施例の説明に限定されず種々の変形実施が可能である。
本開示による技術は、上記実施の形態および実施例の説明に限定されず種々の変形実施が可能である。
例えば、上記一実施の形態および実施例において示した各部の形状および数値は、いずれも本技術を実施するための具体化のほんの一例に過ぎず、これらによって本技術の技術的範囲が限定的に解釈されることがあってはならないものである。
例えば、上記一実施の形態および実施例において示したレンズ枚数とは異なる枚数のレンズを備えた構成であってもよい。さらに、実質的に屈折力を有さないレンズをさらに備えた構成であってもよい。
また例えば、本技術は以下のような構成を取ることができる。
以下の構成の本技術によれば、絞りよりも物体側にn(n≧4)枚の負レンズが配置された構成において、各負レンズの構成の最適化を図るようにしたので、小型で大口径でありながら、諸収差が良好に補正され、画面全体で高い光学性能を実現可能となる。
以下の構成の本技術によれば、絞りよりも物体側にn(n≧4)枚の負レンズが配置された構成において、各負レンズの構成の最適化を図るようにしたので、小型で大口径でありながら、諸収差が良好に補正され、画面全体で高い光学性能を実現可能となる。
[1]
最も物体側に配置され、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズと、
絞りと、
前記第1の負レンズと前記絞りとの間において、物体側から像面側に向かって順に配置された第2ないし第n(n≧4)の負レンズと、
前記第2の負レンズと第3の負レンズとの間の光路上に形成された両凸形状の空気レンズと
を備え、
以下の条件式を満足する
広角レンズ。
L1νd≧Lkνd≧Lnνd ……(1)
Lnνd<35 ……(2)
ただし、
L1νd:前記第1の負レンズのアッベ数
Lnνd:前記第nの負レンズのアッベ数
Lkνd:第kの負レンズのアッベ数(k=2,…,n-1)
とする。
[2]
以下の条件式を満足する
上記[1]に記載の広角レンズ。
-60<fLa1<-20 ……(3)
ただし、
fLa1:前記空気レンズの焦点距離
とする。
[3]
物体側から像面側に向かって順に、
前記第1ないし第nの負レンズを有する第1レンズ群と、
前記絞りと、
複数のレンズを有し、正の屈折力を持つ第2レンズ群と
を備え、
フォーカシングに際して前記第2レンズ群全体もしくは前記第2レンズ群の前記複数のレンズのうち一部のレンズが光軸方向に移動する
上記[1]または[2]に記載の広角レンズ。
[4]
以下の条件式を満足する
上記[3]に記載の広角レンズ。
5.5<|f1|/f ……(4)
ただし、
f:無限遠にフォーカシングした状態における全系の焦点距離
f1:前記第1レンズ群の焦点距離
とする。
[5]
以下の条件式を満足する
上記[3]または[4]に記載の広角レンズ。
0.38<BF/f<1.0 ……(5)
ただし、
f:無限遠にフォーカシングした状態における全系の焦点距離
BF:最も像面側のレンズ面から像面までの距離
とする。
[6]
以下の条件式を満足する
上記[3]ないし[5]のいずれか1つに記載の広角レンズ。
3.0<|f1|/f2 ……(6)
ただし、
f1:前記第1レンズ群の焦点距離
f2:無限遠にフォーカシングした状態における前記第2レンズ群の焦点距離
とする。
[7]
広角レンズと、前記広角レンズによって形成された光学像に応じた撮像信号を出力する撮像素子とを含み、
前記広角レンズは、
最も物体側に配置され、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズと、
絞りと、
前記第1の負レンズと前記絞りとの間において、物体側から像面側に向かって順に配置された第2ないし第n(n≧4)の負レンズと、
前記第2の負レンズと第3の負レンズとの間の光路上に形成された両凸形状の空気レンズと
を備え、
以下の条件式を満足する
撮像装置。
L1νd≧Lkνd≧Lnνd ……(1)
Lnνd<35 ……(2)
ただし、
L1νd:前記第1の負レンズのアッベ数
Lnνd:前記第nの負レンズのアッベ数
Lkνd:第kの負レンズのアッベ数(k=2,…,n-1)
とする。
[8]
実質的に屈折力を有さないレンズをさらに備えた
上記[1]ないし[6]のいずれか1つに記載の広角レンズ。
[9]
前記広角レンズは、実質的に屈折力を有さないレンズをさらに備える
上記[7]に記載の撮像装置。
最も物体側に配置され、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズと、
絞りと、
前記第1の負レンズと前記絞りとの間において、物体側から像面側に向かって順に配置された第2ないし第n(n≧4)の負レンズと、
前記第2の負レンズと第3の負レンズとの間の光路上に形成された両凸形状の空気レンズと
を備え、
以下の条件式を満足する
広角レンズ。
L1νd≧Lkνd≧Lnνd ……(1)
Lnνd<35 ……(2)
ただし、
L1νd:前記第1の負レンズのアッベ数
Lnνd:前記第nの負レンズのアッベ数
Lkνd:第kの負レンズのアッベ数(k=2,…,n-1)
とする。
[2]
以下の条件式を満足する
上記[1]に記載の広角レンズ。
-60<fLa1<-20 ……(3)
ただし、
fLa1:前記空気レンズの焦点距離
とする。
[3]
物体側から像面側に向かって順に、
前記第1ないし第nの負レンズを有する第1レンズ群と、
前記絞りと、
複数のレンズを有し、正の屈折力を持つ第2レンズ群と
を備え、
フォーカシングに際して前記第2レンズ群全体もしくは前記第2レンズ群の前記複数のレンズのうち一部のレンズが光軸方向に移動する
上記[1]または[2]に記載の広角レンズ。
[4]
以下の条件式を満足する
上記[3]に記載の広角レンズ。
5.5<|f1|/f ……(4)
ただし、
f:無限遠にフォーカシングした状態における全系の焦点距離
f1:前記第1レンズ群の焦点距離
とする。
[5]
以下の条件式を満足する
上記[3]または[4]に記載の広角レンズ。
0.38<BF/f<1.0 ……(5)
ただし、
f:無限遠にフォーカシングした状態における全系の焦点距離
BF:最も像面側のレンズ面から像面までの距離
とする。
[6]
以下の条件式を満足する
上記[3]ないし[5]のいずれか1つに記載の広角レンズ。
3.0<|f1|/f2 ……(6)
ただし、
f1:前記第1レンズ群の焦点距離
f2:無限遠にフォーカシングした状態における前記第2レンズ群の焦点距離
とする。
[7]
広角レンズと、前記広角レンズによって形成された光学像に応じた撮像信号を出力する撮像素子とを含み、
前記広角レンズは、
最も物体側に配置され、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズと、
絞りと、
前記第1の負レンズと前記絞りとの間において、物体側から像面側に向かって順に配置された第2ないし第n(n≧4)の負レンズと、
前記第2の負レンズと第3の負レンズとの間の光路上に形成された両凸形状の空気レンズと
を備え、
以下の条件式を満足する
撮像装置。
L1νd≧Lkνd≧Lnνd ……(1)
Lnνd<35 ……(2)
ただし、
L1νd:前記第1の負レンズのアッベ数
Lnνd:前記第nの負レンズのアッベ数
Lkνd:第kの負レンズのアッベ数(k=2,…,n-1)
とする。
[8]
実質的に屈折力を有さないレンズをさらに備えた
上記[1]ないし[6]のいずれか1つに記載の広角レンズ。
[9]
前記広角レンズは、実質的に屈折力を有さないレンズをさらに備える
上記[7]に記載の撮像装置。
本出願は、日本国特許庁において2020年9月18日に出願された日本特許出願番号第2020-157881号を基礎として優先権を主張するものであり、この出願のすべての内容を参照によって本出願に援用する。
当業者であれば、設計上の要件や他の要因に応じて、種々の修正、コンビネーション、サブコンビネーション、および変更を想到し得るが、それらは添付の請求の範囲やその均等物の範囲に含まれるものであることが理解される。
Claims (7)
- 最も物体側に配置され、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズと、
絞りと、
前記第1の負レンズと前記絞りとの間において、物体側から像面側に向かって順に配置された第2ないし第n(n≧4)の負レンズと、
前記第2の負レンズと第3の負レンズとの間の光路上に形成された両凸形状の空気レンズと
を備え、
以下の条件式を満足する
広角レンズ。
L1νd≧Lkνd≧Lnνd ……(1)
Lnνd<35 ……(2)
ただし、
L1νd:前記第1の負レンズのアッベ数
Lnνd:前記第nの負レンズのアッベ数
Lkνd:第kの負レンズのアッベ数(k=2,…,n-1)
とする。 - 以下の条件式を満足する
請求項1に記載の広角レンズ。
-60<fLa1<-20 ……(3)
ただし、
fLa1:前記空気レンズの焦点距離
とする。 - 物体側から像面側に向かって順に、
前記第1ないし第nの負レンズを有する第1レンズ群と、
前記絞りと、
複数のレンズを有し、正の屈折力を持つ第2レンズ群と
を備え、
フォーカシングに際して前記第2レンズ群全体もしくは前記第2レンズ群の前記複数のレンズのうち一部のレンズが光軸方向に移動する
請求項1に記載の広角レンズ。 - 以下の条件式を満足する
請求項3に記載の広角レンズ。
5.5<|f1|/f ……(4)
ただし、
f:無限遠にフォーカシングした状態における全系の焦点距離
f1:前記第1レンズ群の焦点距離
とする。 - 以下の条件式を満足する
請求項3に記載の広角レンズ。
0.38<BF/f<1.0 ……(5)
ただし、
f:無限遠にフォーカシングした状態における全系の焦点距離
BF:最も像面側のレンズ面から像面までの距離
とする。 - 以下の条件式を満足する
請求項3に記載の広角レンズ。
3.0<|f1|/f2 ……(6)
ただし、
f1:前記第1レンズ群の焦点距離
f2:無限遠にフォーカシングした状態における前記第2レンズ群の焦点距離
とする。 - 広角レンズと、前記広角レンズによって形成された光学像に応じた撮像信号を出力する撮像素子とを含み、
前記広角レンズは、
最も物体側に配置され、物体側に凸面を向けた負のメニスカスレンズからなる第1の負レンズと、
絞りと、
前記第1の負レンズと前記絞りとの間において、物体側から像面側に向かって順に配置された第2ないし第n(n≧4)の負レンズと、
前記第2の負レンズと第3の負レンズとの間の光路上に形成された両凸形状の空気レンズと
を備え、
以下の条件式を満足する
撮像装置。
L1νd≧Lkνd≧Lnνd ……(1)
Lnνd<35 ……(2)
ただし、
L1νd:前記第1の負レンズのアッベ数
Lnνd:前記第nの負レンズのアッベ数
Lkνd:第kの負レンズのアッベ数(k=2,…,n-1)
とする。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022550439A JPWO2022059463A1 (ja) | 2020-09-18 | 2021-08-27 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020157881 | 2020-09-18 | ||
| JP2020-157881 | 2020-09-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022059463A1 true WO2022059463A1 (ja) | 2022-03-24 |
Family
ID=80776148
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/031610 WO2022059463A1 (ja) | 2020-09-18 | 2021-08-27 | 広角レンズおよび撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2022059463A1 (ja) |
| WO (1) | WO2022059463A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115079387A (zh) * | 2022-06-01 | 2022-09-20 | 广东北创光电科技股份有限公司 | 一种中焦长法兰视频镜头 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04116613A (ja) * | 1990-09-07 | 1992-04-17 | Canon Inc | 広角ズームレンズ |
| JP2000098222A (ja) * | 1998-09-18 | 2000-04-07 | Cosina Co Ltd | 投射レンズ |
| JP2015102646A (ja) * | 2013-11-25 | 2015-06-04 | 株式会社ニコン | ズームレンズ、光学機器及びズームレンズの製造方法 |
| WO2016056310A1 (ja) * | 2014-10-09 | 2016-04-14 | ソニー株式会社 | 広角レンズおよび撮像装置 |
| WO2016194113A1 (ja) * | 2015-06-01 | 2016-12-08 | オリンパス株式会社 | 単焦点光学系及びそれを備えた光学装置 |
| JP2019053236A (ja) * | 2017-09-19 | 2019-04-04 | 富士フイルム株式会社 | 撮像レンズ及び撮像装置 |
-
2021
- 2021-08-27 JP JP2022550439A patent/JPWO2022059463A1/ja active Pending
- 2021-08-27 WO PCT/JP2021/031610 patent/WO2022059463A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04116613A (ja) * | 1990-09-07 | 1992-04-17 | Canon Inc | 広角ズームレンズ |
| JP2000098222A (ja) * | 1998-09-18 | 2000-04-07 | Cosina Co Ltd | 投射レンズ |
| JP2015102646A (ja) * | 2013-11-25 | 2015-06-04 | 株式会社ニコン | ズームレンズ、光学機器及びズームレンズの製造方法 |
| WO2016056310A1 (ja) * | 2014-10-09 | 2016-04-14 | ソニー株式会社 | 広角レンズおよび撮像装置 |
| WO2016194113A1 (ja) * | 2015-06-01 | 2016-12-08 | オリンパス株式会社 | 単焦点光学系及びそれを備えた光学装置 |
| JP2019053236A (ja) * | 2017-09-19 | 2019-04-04 | 富士フイルム株式会社 | 撮像レンズ及び撮像装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115079387A (zh) * | 2022-06-01 | 2022-09-20 | 广东北创光电科技股份有限公司 | 一种中焦长法兰视频镜头 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022059463A1 (ja) | 2022-03-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7364022B2 (ja) | 撮像レンズおよび撮像装置 | |
| WO2020202965A1 (ja) | 撮像レンズおよび撮像装置 | |
| WO2020090368A1 (ja) | 撮像レンズおよび撮像装置 | |
| JPWO2020174865A1 (ja) | 可変焦点距離レンズ系及び撮像装置 | |
| WO2021117497A1 (ja) | 撮像レンズおよび撮像装置 | |
| JP7192852B2 (ja) | ズームレンズおよび撮像装置 | |
| WO2022059463A1 (ja) | 広角レンズおよび撮像装置 | |
| WO2022009760A1 (ja) | 魚眼レンズおよび撮像装置 | |
| WO2020213337A1 (ja) | 光学系および撮像装置 | |
| JP2022140076A (ja) | 撮像レンズおよび撮像装置 | |
| WO2021200257A1 (ja) | ズームレンズおよび撮像装置 | |
| WO2021200207A1 (ja) | ズームレンズおよび撮像装置 | |
| WO2021200253A1 (ja) | ズームレンズおよび撮像装置 | |
| WO2021200206A1 (ja) | ズームレンズおよび撮像装置 | |
| WO2020246427A1 (ja) | 光学系および撮像装置 | |
| WO2021085154A1 (ja) | 撮像レンズおよび撮像装置 | |
| WO2023153076A1 (ja) | ズームレンズ、および撮像装置 | |
| WO2023181666A1 (ja) | ズームレンズ、および撮像装置 | |
| WO2023181667A1 (ja) | ズームレンズ、および撮像装置 | |
| JP2022117197A (ja) | 撮像レンズおよび撮像装置 | |
| WO2020174866A1 (ja) | 可変焦点距離レンズ系及び撮像装置 | |
| JP2022155067A (ja) | ズームレンズおよび撮像装置 | |
| JP2023044106A (ja) | ズームレンズ、および撮像装置 | |
| JP2023039817A (ja) | ズームレンズ、および撮像装置 | |
| JP2023172781A (ja) | 結像光学系、および撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21869150 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022550439 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21869150 Country of ref document: EP Kind code of ref document: A1 |