WO2022003916A1 - 欠陥検査装置 - Google Patents
欠陥検査装置 Download PDFInfo
- Publication number
- WO2022003916A1 WO2022003916A1 PCT/JP2020/026071 JP2020026071W WO2022003916A1 WO 2022003916 A1 WO2022003916 A1 WO 2022003916A1 JP 2020026071 W JP2020026071 W JP 2020026071W WO 2022003916 A1 WO2022003916 A1 WO 2022003916A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- unit
- excitation
- defect inspection
- inspection target
- inspection device
- Prior art date
Links
- 238000007689 inspection Methods 0.000 title claims abstract description 204
- 230000007547 defect Effects 0.000 title claims abstract description 84
- 230000005284 excitation Effects 0.000 claims abstract description 118
- 238000003384 imaging method Methods 0.000 claims abstract description 21
- 238000005286 illumination Methods 0.000 claims abstract description 20
- 238000012986 modification Methods 0.000 description 32
- 230000004048 modification Effects 0.000 description 32
- 230000003287 optical effect Effects 0.000 description 12
- 238000010586 diagram Methods 0.000 description 11
- 238000005259 measurement Methods 0.000 description 7
- 238000006073 displacement reaction Methods 0.000 description 5
- 230000010363 phase shift Effects 0.000 description 5
- 230000001902 propagating effect Effects 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000000644 propagated effect Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 229910000831 Steel Inorganic materials 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 238000012951 Remeasurement Methods 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000001179 sorption measurement Methods 0.000 description 1
- 230000003313 weakening effect Effects 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/04—Analysing solids
- G01N29/043—Analysing solids in the interior, e.g. by shear waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/8806—Specially adapted optical and illumination features
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02094—Speckle interferometers, i.e. for detecting changes in speckle pattern
- G01B9/02095—Speckle interferometers, i.e. for detecting changes in speckle pattern detecting deformation from original shape
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02097—Self-interferometers
- G01B9/02098—Shearing interferometers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/04—Analysing solids
- G01N29/045—Analysing solids by imparting shocks to the workpiece and detecting the vibrations or the acoustic waves caused by the shocks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/04—Analysing solids
- G01N29/06—Visualisation of the interior, e.g. acoustic microscopy
- G01N29/0654—Imaging
- G01N29/069—Defect imaging, localisation and sizing using, e.g. time of flight diffraction [TOFD], synthetic aperture focusing technique [SAFT], Amplituden-Laufzeit-Ortskurven [ALOK] technique
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/22—Details, e.g. general constructional or apparatus details
- G01N29/24—Probes
- G01N29/2418—Probes using optoacoustic interaction with the material, e.g. laser radiation, photoacoustics
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N2021/1765—Method using an image detector and processing of image signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2201/00—Features of devices classified in G01N21/00
- G01N2201/06—Illumination; Optics
- G01N2201/061—Sources
- G01N2201/06113—Coherent sources; lasers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/02—Indexing codes associated with the analysed material
- G01N2291/028—Material parameters
- G01N2291/0289—Internal structure, e.g. defects, grain size, texture
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/26—Scanned objects
- G01N2291/269—Various geometry objects
- G01N2291/2694—Wings or other aircraft parts
Definitions
- the present invention relates to a defect inspection device.
- a defect inspection device is known.
- Such a defect inspection device is disclosed in, for example, Japanese Patent No. 6451695.
- Japanese Patent No. 6451695 is a defect inspection device including an excitation unit that excites an elastic wave in an object to be inspected, an illumination unit that irradiates a measurement area on the surface of the object to be inspected with strobe illumination, and a displacement measurement unit. Is disclosed.
- the displacement measuring unit is configured to collectively measure the displacement of each point in the measurement region in the front-rear direction in at least three different phases of the elastic wave by controlling the phase of the elastic wave and the timing of strobe lighting. ..
- the vibration state (amplitude and phase) of each point in the measurement region is imaged by the displacement measuring unit.
- the defect inspection apparatus described in Japanese Patent No. 6451695 does not have a fixed relative position between the excitation unit and the image pickup unit. Therefore, the relative position between the excitation unit and the imaging unit may change for each inspection.
- the vibration state of each point in the measurement region may change when the same inspection region (imaging range) is inspected by remeasurement or the like.
- the vibration state of each point in the measurement area changes, the reproducibility of the inspection becomes poor. Therefore, a defect inspection device capable of improving the reproducibility of inspection is desired.
- the present invention has been made to solve the above-mentioned problems, and one object of the present invention is to provide a defect inspection device capable of improving the reproducibility of inspection.
- the defect inspection apparatus in one aspect of the present invention is excited by an excitation unit that excites an elastic wave to the inspection target, a laser illumination that irradiates the inspection target with a laser beam, and an excitation unit.
- An interfering part that interferes with laser light reflected from different positions of the inspection target, an image pickup unit that captures the interfered laser light, and a holding that holds the image pickup unit at a position separated by a predetermined distance from the inspection target so that they can be arranged.
- a connecting member for connecting the holding member or the imaging unit and the exciting unit is provided.
- the connection member since the excitation unit and the image pickup unit are connected via the holding member or directly, it is possible to suppress the change in the relative position between the excitation unit and the image pickup unit. As a result, it is possible to provide a defect inspection apparatus capable of improving the reproducibility of inspection.
- the configuration of the defect inspection device 100 according to the embodiment of the present invention will be described with reference to FIGS. 1 to 6.
- the defect inspection device 100 includes an excitation unit 1, a laser illumination 2, a speckle-sharing interferometer 3, a holding member 4, a connecting member 5, a control unit 6, and a signal generation. It includes a device 7, a display unit 8, an operation input unit 9, and a vacuum pump 10.
- the excitation unit 1 receives an electric signal from the signal generator 7 and excites an elastic wave in the inspection target 90.
- the electric signal received by the excitation unit 1 from the signal generator 7 includes, for example, an AC pulse signal.
- the excitation unit 1 is arranged so as to be in contact with the inspection target 90, converts an AC electric signal from the signal generator 7 into mechanical vibration, and excites an elastic wave in the inspection target 90. The detailed configuration of the excitation unit 1 will be described later.
- the laser illumination 2 receives an electric signal from the signal generator 7 and irradiates the inspection target 90 with the laser beam.
- the laser illumination 2 includes a laser light source (not shown) and an illumination light lens.
- the illumination light lens spreads the laser beam emitted from the laser light source over the entire inspection area 90a (see FIG. 2) on the surface of the inspection target 90 and irradiates the lens.
- the excitation unit 1 and the laser illumination 2 are connected to the signal generator 7 via a cable 20.
- the speckle-sharing interferometer 3 is configured to interfere with laser light reflected from different positions of the inspection target 90 excited by the excitation unit 1. The detailed configuration of the speckle-sharing interferometer 3 will be described later.
- the holding member 4 is configured to hold the speckle-sharing interferometer 3 so as to be displaceable at a position separated from the inspection target 90 by a predetermined distance. Further, the holding member 4 is configured so that the laser illumination 2 can be arranged at a position separated from the inspection target 90 by a predetermined distance.
- the holding member 4 has an interferometer holding portion 40 for holding the speckle-sharing interferometer 3 and a plurality of leg portions 41 provided with the interferometer holding portion 40.
- the exciting portion 1 is provided on any of the plurality of leg portions 41 via the connecting member 5.
- the interferometer holding unit 40 is an example of the “imaging unit holding unit” in the claims.
- the plurality of leg portions 41 are provided with a suction portion 12 that supports the holding member 4 by adsorbing to the inspection target 90.
- the connecting member 5 is provided to connect the exciting portion 1 and the holding member 4. Specifically, the excitation unit 1 is connected to one end surface of the connecting member 5. Further, the holding member 4 is connected to the other end surface of the connecting member 5. In the present embodiment, the connecting member 5 has a flat plate shape. Further, the connecting member 5 is configured to connect the holding member 4 or the speckle-sharing interferometer 3 and the exciting unit 1. In the example shown in FIG. 1, the connecting member 5 connects the holding member 4 and the exciting portion 1. The detailed configuration of the connecting member 5 will be described later.
- the control unit 6 is configured to generate an image 61 (see FIG. 4) relating to the propagation of elastic waves by controlling the speckle-sharing interferometer 3. Further, the control unit 6 is configured to transmit an AC electric signal to the excitation unit 1 by controlling the signal generator 7. Further, the control unit 6 is configured to transmit an electric signal to the laser illumination 2. Further, the control unit 6 is configured to reduce the pressure inside the recess 12a (see FIG. 6) of the suction unit 12 by using the vacuum pump 10 by controlling the solenoid valve 11.
- the control unit 6 includes a processor such as a CPU (Central Processing Unit) or FPGA (Field Programmable Gate Array), a GPU (Graphics Processing Unit), and a computer including a volatile and / or non-volatile memory. ..
- the signal generator 7 is configured to generate an AC electric signal to be transmitted to the excitation unit 1 under the control of the control unit 6. Further, the signal generator 7 is configured to generate an electric signal to be transmitted to the laser illumination 2 under the control of the control unit 6.
- the display unit 8 is configured to display an image 61 relating to the propagation of elastic waves in the inspection target 90 created by the control unit 6.
- the display unit 8 includes, for example, a liquid crystal monitor.
- the operation input unit 9 is configured to be able to accept the operation input of the inspector.
- the operation input unit 9 includes, for example, a touch panel.
- the vacuum pump 10 is configured to suck the gas in the recess 12a (see FIG. 6) of the suction unit 12 under the control of the control unit 6.
- the suction unit 12 is configured to be adsorbed to the inspection target 90 by sucking the gas in the recess 12a of the suction unit 12 by the vacuum pump 10.
- control unit 6, the signal generator 7, and the display unit 8 are provided in the portable control device 110.
- the control device 110 is provided with, for example, a backpack (not shown). As a result, the inspector can inspect the inspection target 90 while carrying the control device 110 on his back. Further, the vacuum pump 10 is provided in the control device 110 so that it can be carried together with the control device 110.
- the inspection target 90 is, for example, a structure.
- the inspection target 90 is an aircraft body. More specifically, it is a coated steel plate used for an aircraft body, in which a coating film 92 is coated on a surface of a steel plate 91.
- the defect inspection device 100 inspects the defect of the inspection target 90.
- FIG. 1 shows an example of inspecting an inspection target 90 in which a crack 93 and a peeling 94 are generated as defects.
- the defect inspection apparatus 100 is in a state where the laser illumination 2 and the speckle-sharing interferometer 3 and the inspection target 90 (inspection region 90a) are arranged to face each other. , It is configured to inspect the inspection target 90. Specifically, the defect inspection device 100 is configured to irradiate the inspection region 90a of the inspection target 90 with a laser beam.
- the holding member 4 includes a first leg portion 41a, a second leg portion 41b, and a third leg portion 41c as a plurality of leg portions 41.
- the exciting portion 1 is provided on any one of the plurality of leg portions 41. In the example shown in FIG. 2, the exciting portion 1 is provided on the first leg portion 41a.
- the exciting portion 1 is provided on the first leg portion 41a in a state where the relative position with the first leg portion 41a is substantially fixed via the connecting member 5.
- the excitation unit 1 comes into contact with the inspection target 90 at a position where the relative position with respect to the speckle-sharing interferometer 3 is preset. , Is provided on the first leg portion 41a.
- the preset position is a position where the relative position of the excitation unit 1 with respect to the speckle-sharing interferometer 3 becomes substantially equal for each inspection.
- the holding member 4 is provided with a grip portion 4a.
- the inspector brings the defect inspection device 100 into contact with the inspection target 90 while gripping the grip portion 4a, and operates the operation input unit 9 to attract the defect inspection device 100 to the inspection target 90. Since the defect inspection device 100 can be fixed in contact with the inspection target 90 via the suction portion 12, the inspector can carry out the inspection without grasping it.
- the speckle-sharing interferometer 3 includes an interferometer 30 and an image sensor 31.
- the interference unit 30 includes a beam splitter 32, a phase shifter 33, a first reflector 34, a second reflector 35, and a condenser lens 36.
- the image sensor 31 is an example of the "imaging unit" in the claims.
- the beam splitter 32 is a half mirror, and is arranged at a position where the laser beam reflected on the surface of the inspection target 90 is incident.
- the first reflecting mirror 34 is arranged so as to have an angle of 45 degrees with respect to the reflecting surface of the beam splitter 32 on the optical path of the laser light reflected by the beam splitter 32.
- the second reflecting mirror 35 is arranged so as to be slightly inclined from an angle of 45 degrees with respect to the reflecting surface of the beam splitter 32 on the optical path of the laser light passing through the beam splitter 32.
- the phase shifter 33 is arranged between the beam splitter 32 and the first reflecting mirror 34, and changes (shifts) the phase of the transmitted laser light under the control of the control unit 6.
- the phase shifter 33 includes, for example, an optical member.
- the optical member constituting the phase shifter 33 includes, for example, a composite lens pair in which two lenses having different refractive indexes of transmitted laser light are integrated.
- the image sensor 31 has a large number of detection elements, and is a laser beam 60a that is reflected by the beam splitter 32 and then reflected by the first reflector 34 to pass through the beam splitter 32, and a second reflector after passing through the beam splitter 32. It is arranged on the optical path of the laser beam 60b reflected by the beam splitter 32 and reflected by the beam splitter 32.
- the condenser lens 36 is arranged between the beam splitter 32 and the image sensor 31, and condenses the laser beam 60a transmitted through the beam splitter 32 and the laser beam 60b reflected by the beam splitter 32.
- the control unit 6 operates the phase shifter 33 arranged in the speckle-sharing interferometer 3 with an actuator (not shown) to change the phase of the transmitted laser beam. As a result, the phase difference between the laser light reflected at the point A 95 and the laser light reflected at the point B 96 changes.
- Each detection element of the image sensor 31 detects the intensity of the interference light in which these two laser beams interfere with each other.
- the control unit 6 controls the vibration of the excitation unit 1 and the timing of irradiation of the laser beam of the laser illumination 2 via the signal generator 7, and causes the image to be captured while changing the phase shift amount.
- the phase shift amount is changed by ⁇ / 4.
- the control unit 6 processes the detection signal from each detection element according to the following procedure, and acquires an image 61 relating to the propagation of elastic waves.
- B is a complex amplitude and is expressed as in the equation (3).
- B Aexp (i ⁇ ): Complex amplitude ... (3)
- the complex amplitude B is the image information (two-dimensional spatial information of the complex amplitude) that is the basis for outputting the image 61 relating to the propagation of elastic waves. From the approximate equation obtained by removing the constant term C from the equation (2), a moving image (30 to 60 frames) displaying the optical phase change at each phase time ⁇ (0 ⁇ ⁇ ⁇ 2 ⁇ ) of the vibration is constructed, and the elastic wave is generated. It is output as an image 61 related to propagation.
- a spatial filter may be appropriately applied to the complex amplitude B in order to remove noise.
- the phase shift amount and the laser irradiation timing step ( ⁇ / 4 and T / 8, respectively in the above example, where T is the vibration cycle) are not limited to this. In this case, the calculation formula is different from the above formulas (1) to (3).
- FIG. 4 shows an example in which a portion 80 having a discontinuous vibration state is generated when a crack 93 is generated as a defect. Further, FIG. 4 shows an example in which a portion 81 having a discontinuous vibration state occurs when the peeling 94 occurs as a defect.
- the excitation unit 1 is composed of a housing 1a, a vibrator 1b, and a vibration absorbing member 1c.
- the housing 1a is connected to the first leg portion 41a via the connecting member 5. Specifically, the housing 1a is connected to the connecting member 5 via the exciting portion connecting member 5a. Further, the exciting portion connecting member 5a has a joint portion 5b. The housing 1a is provided on the exciting portion connecting member 5a so as to be rotatable around the joint portion 5b. Therefore, even when the first leg portion 41a is not perpendicular to the inspection target 90, the excitation portion 1 can be rotated by the joint portion 5b to bring the excitation portion 1 into vertical contact with the inspection target 90. can.
- a vibrator 1b and a vibration absorbing member 1c are provided inside the housing 1a.
- the vibrator 1b is configured so that a current is supplied via the cable 20.
- the oscillator 1b vibrates the vibrating surface 1e of the oscillator 1b in the X direction by converting the voltage of the supplied current.
- the vibrator 1b is configured to excite an elastic wave to the inspection target 90 by bringing the vibration surface 1e into contact with the inspection target 90.
- the vibrator 1b includes, for example, a piezoelectric element.
- the vibration absorbing member 1c is provided between the exciting unit 1 and the speckle-sharing interferometer 3 (image sensor 31). That is, the vibration absorbing member 1c is provided in the middle of the connecting structure between the exciting portion 1 and the image sensor 31. Specifically, the vibration absorbing member 1c is provided between the housing 1a and the vibrator 1b. The vibration absorbing member 1c is provided to absorb the vibration from the exciting portion 1.
- the vibration absorbing member 1c includes, for example, an elastic member.
- the elastic member is, for example, a spring.
- the vibration absorbing member 1c has an appropriate spring constant based on the amplitude, frequency, etc. of the vibration of the vibrator 1b so that the vibration of the vibrator 1b can be suppressed from propagating to the housing 1a. It is composed of springs.
- the vibration absorbing member 1c is configured to apply an urging force that urges the vibrator 1b in the direction of the arrow 70 to the vibrator 1b. That is, in the example shown in FIG. 5, the vibration absorbing member 1c is arranged between the housing 1a and the vibrator 1b in a state of being contracted from the natural length.
- the exciting portion 1 is provided on the first leg portion 41a together with the suction portion 12. Specifically, the exciting portion 1 is provided on the first leg portion 41a together with the plurality of suction portions 12 via the connecting member 5.
- the excitation unit 1 is arranged between the two suction units 12. Further, the excitation unit 1 and the plurality of suction units 12 are arranged so as to be arranged along the Y direction. As a result, it is possible to prevent the suction portion 12 from being arranged in the inspection region 90a (see FIG. 2).
- the suction portion 12 has a recess 12a and a close contact portion 12b that is in close contact with the inspection target 90.
- the recess 12a is provided in the suction portion 12 so that the end surface on the opening side can come into contact with the inspection target 90.
- the close contact portion 12b is composed of an elastic member.
- the close contact portion 12b includes, for example, rubber.
- the close contact portion 12b is provided so as to surround the entire circumference of the end surface of the recess 12a on the opening side. Therefore, when the suction portion 12 is brought into contact with the inspection target 90, a closed space is formed by the recess 12a, the close contact portion 12b, and the inspection target 90. Further, the suction portion 12 is connected to the vacuum pump 10 via the tube 21.
- the suction unit 12 is configured such that the gas in the closed space is sucked by the vacuum pump 10 via the tube 21 to reduce the pressure in the closed space and to be adsorbed on the inspection target 90.
- the connecting member 5 includes a suction portion connecting member 5c.
- the suction unit 12 is connected to the connection member 5 via the suction unit connection member 5c.
- the suction portion connecting member 5c has a joint portion 5d.
- the suction portion 12 is provided on the suction portion connecting member 5c so as to be rotatable around the joint portion 5d. Therefore, even when the first leg portion 41a is not perpendicular to the inspection target 90, the suction portion 12 can be rotated by the joint portion 5d to bring the suction portion 12 into vertical contact with the inspection target 90. can. Therefore, the holding member 4 can be stably supported by the suction portion 12.
- the plurality of legs 41 have a hollow cylindrical shape. Further, the connecting member 5 is formed to be hollow.
- the cable 20 is housed inside the first leg portion 41a. Further, the tube 21 is housed inside the first leg portion 41a.
- the excitation unit 1 and the image pickup unit (image sensor 31) are connected via the holding member 4, so that the excitation unit 1 and the image pickup unit (image sensor 31) are connected to each other. It is possible to suppress the change in the relative position of. As a result, the reproducibility of the inspection can be improved.
- a vibration absorbing member 1c provided between the exciting unit 1 and the imaging unit (image sensor 31) and absorbing the vibration from the exciting unit 1 is further provided.
- the vibration from the excitation unit 1 from propagating to the image pickup unit (image sensor 31).
- the vibration of the image pickup unit (image sensor 31) due to the vibration from the excitation unit 1. Therefore, the image 61 relating to the propagation of elastic waves due to the vibration of the image pickup unit (image sensor 31). It is possible to suppress the generation of noise.
- the holding member 4 has an imaging unit holding unit (interferometer holding unit 40) that holds the imaging unit (image sensor 31) and an imaging unit holding unit (interferometer holding unit 40).
- the exciting portion 1 has one of the plurality of leg portions 41 (first leg portion 41a) via the connecting member 5. It is provided in.
- the excitation unit 1 and the image pickup unit (image sensor 31) are connected via the connecting member 5 and the first leg portion 41a, so that the relative position of the excitation unit 1 with respect to the image pickup unit (image sensor 31) changes. Can be easily suppressed.
- the excitation unit 1 when the first leg portion 41a is brought into contact with the inspection target 90, the excitation unit 1 is at a position where the relative position with respect to the image pickup unit (image sensor 31) is preset.
- the first leg portion 41a is provided so as to come into contact with the inspection target 90.
- the excitation unit 1 includes the housing 1a, the vibrator 1b, and the vibration absorbing member 1c, and the housing 1a is the first leg via the connecting member 5. It is connected to the portion 41a, the vibrator 1b and the vibration absorbing member 1c are provided inside the housing 1a, and the vibration absorbing member 1c is provided between the housing 1a and the vibrator 1b. .. As a result, the vibration absorbing member 1c can suppress the vibration from the vibrator 1b from propagating to the housing 1a. As a result, it is possible to suppress the vibration from the vibrator 1b from propagating to the image pickup unit (image sensor 31) via the housing 1a, the connecting member 5, and the first leg portion 41a.
- the vibration absorbing member 1c can urge the vibrator 1b, the vibrator 1b can be brought into close contact with the inspection target 90. As a result, even when the inspection target 90 is not a flat surface, it is possible to excite an elastic wave with respect to the inspection target 90, so that the inspection accuracy can be improved.
- the plurality of leg portions 41 are provided with a suction portion 12 that supports the holding member 4 by adsorbing to the inspection target 90, and the excitation portion 1 is a suction portion. It is provided on the first leg portion 41a together with the twelve. As a result, the holding member 4 and the exciting portion 1 are supported by the suction portion 12, so that the inspector can inspect without supporting the holding member 4. As a result, it is possible to reduce the burden on the inspector by comparing the configurations in which the holding member 4 is inspected while being supported by the inspector. Further, since the inspector can inspect without supporting the holding member 4, it is possible to prevent the inspector from giving vibration to the holding member 4.
- a contact member 13 that abuts on the inspection target 90 is provided on the plurality of legs 41 to excite.
- the portion 1 may be provided on the first leg portion 41a together with the contact member 13. Even with this configuration, the same effect as the configuration in which the excitation unit 1 is provided together with the suction unit 12 can be obtained.
- the excitation unit 1 is provided on the first leg unit 41a together with the plurality of suction units 12. As a result, the excitation unit 1 can be brought into close contact with the inspection target 90 by the plurality of suction units 12. Therefore, unlike the configuration in which the inspector abuts the excitation unit 1 on the inspection target 90 for inspection, the excitation unit 1 can be brought into close contact with the inspection target 90 by a predetermined suction force. As a result, it is possible to suppress the change in the degree of adhesion of the excitation unit 1 for each inspection, so that the reliability of the inspection can be improved.
- the excitation unit 1 is configured to excite elastic waves with respect to the inspection target 90 by supplying an electric current through the cable 20. , Is housed inside the first leg 41a. Thereby, for example, it is possible to suppress the complicated routing of the cable 20 as compared with the configuration in which the cable 20 is not housed inside the first leg portion 41a. As a result, the workability of the inspection can be improved.
- the exciting portion 1 may be provided on the first leg portion 41a together with the contact member 13.
- the abutting member 13 is made of, for example, a resin or an elastic member.
- the suction portion 12 is provided on the second leg portion 41b and the third leg portion 41c in which the excitation portion 1 is not provided.
- the second leg portion 41b and the third leg portion 41c are on the upper side (Z1 side), and the first leg portion 41a is on the lower side (Z2 side).
- the defect inspection device 100 is arranged so as to be.
- a moment as shown by an arrow 71 is generated with respect to the holding member 4. Therefore, as shown by the arrow 72, a force is applied to the excitation unit 1 to urge the inspection target 90. Therefore, even if the excitation unit 1 and the suction unit 12 are not provided, the excitation unit 1 can be brought into close contact with the inspection target 90.
- the first modification by configuring as described above, it is possible to suppress an increase in the number of parts as compared with a configuration in which the excitation unit 1 is provided together with the suction unit 12. Further, as compared with the configuration in which the excitation unit 1 is provided together with the suction unit 12, it is possible to suppress an increase in the force applied to the excitation unit 1. Therefore, it is possible to prevent the excitation unit 1 from being pressed more than necessary against the inspection target 90 by the force applied to the excitation unit 1 and the amplitude of the elastic wave propagating from the excitation unit 1 to be reduced. As a result, it is possible to suppress a decrease in inspection accuracy due to a small amplitude of elastic waves.
- the excitation unit 1 may be integrally provided inside or outside the suction unit 12.
- the excitation unit 1 is provided in the recess 12a of the suction unit 12, so that the excitation unit 1 is integrally formed inside the suction unit 12.
- the excitation unit 1 is integrally configured inside the suction unit 12, but as shown in FIG. 9, the excitation unit 1 is integrally configured outside the suction unit 12. It may have been.
- a recessed portion 1f may be provided on the inner surface of the excitation portion 1 in contact with the inspection target 90, and the inside of the recessed portion 1f may be depressurized by the vacuum pump 10 to form the suction portion 12.
- the number of parts to be attached to the first leg portion 41a is increased by the configuration as described above, as compared with the configuration in which the excitation portion 1 is provided together with the suction portion 12 for the first leg portion 41a. It can be suppressed. Further, the excitation unit 1 and the suction unit 12 can be integrated, and the handling of the holding member 4 can be suppressed from becoming complicated.
- the connecting member 5 may be configured so that the contact position of the excitation unit 1 with respect to the inspection target 90 can be adjusted.
- the connecting member 5 includes the first section 50, the second section 51, and the third section 52.
- the first section 50 and the second section 51 are configured to be expandable and contractible.
- the first section 50 is connected to the third section 52 via the joint 53.
- the first section portion 50 is configured to be rotatable around the joint portion 53.
- the first section portion 50 is connected to the first leg portion 41a via the joint portion 54.
- the first section portion 50 is configured to be rotatable around the joint portion 54.
- the second section 51 is connected to the third section 52 via the joint portion 55.
- the second section 51 is configured to be rotatable around the joint 55.
- the second section 51 is connected to the first leg 41a via the joint 56.
- the second section 51 is configured to be rotatable around the joint 56.
- the third section 52 is connected to the first section 50 via the joint 53. Further, the third section 52 is connected to the second section 51 via the joint 55. Further, an exciting portion 1 is provided at an end portion of the third node portion 52 opposite to the joint portion 53.
- the first section 50 and the second section 51 are arranged so as to be parallel to each other.
- the third section 52 is moved in the X direction, the first section 50 and the second section 51 rotate around the joint portion 54 and the joint portion 56, respectively.
- the third section 52 can be moved in the X direction while maintaining the angle of the third section 52 with respect to the inspection target 90. Therefore, the connecting member 5 can adjust the position of the excitation unit 1 in the X direction while maintaining the angle of the excitation unit 1 with respect to the inspection target 90.
- the connecting member 5 is configured as a so-called link mechanism.
- the connecting member 5 includes an urging member 5e that urges the excitation unit 1 with respect to the inspection target 90.
- the urging member 5e is provided between the second section 51 and the first leg 41a, and urges the second section 51 in the direction of the arrow 73.
- the urging force by the urging member 5e is applied to the urging unit 1 as an urging force in the direction of the arrow 74 via the second section 51 and the third section 52.
- the first leg portion 41a is provided with the suction portion 12, but the contact member 13 (see FIG. 7) may be provided instead of the suction portion 12.
- the position where the excitation unit 1 comes into contact with the inspection target 90 can be adjusted by the connecting member 5 as described above, so that, for example, the surface of the inspection target 90 has irregularities or is inspected. Even when the surface of the target 90 is curved, the excitation unit 1 can be brought into close contact with the inspection target 90. As a result, the exciting unit 1 can excite a predetermined elastic wave to the inspection target 90, so that it is possible to suppress a decrease in inspection accuracy.
- the connecting member 5 includes the urging member 5e that urges the excitation unit 1 with respect to the inspection target 90
- the surface of the inspection target 90 is inclined.
- the urging force of the urging member 5e allows the exciting portion 1 to be easily brought into close contact with the inspection target 90.
- the excitation unit 1 can excite a predetermined elastic wave to the inspection target 90, it is possible to easily suppress the deterioration of the inspection accuracy.
- the connecting member 5 may be configured to be rotatable in the circumferential direction centered on the first leg portion 41a.
- the connecting member 5 includes the fourth section portion 57 and the cylindrical portion 58.
- the fourth section 57 includes a first section member 57a and a second section member 57b extending in the Y direction, and a third section member 57c extending in the X direction.
- the fourth section 57 is formed by integrally forming the first section member 57a, the second section member 57b, and the third section member 57c.
- the first section member 57a and the second section member 57b are provided with a connecting portion 59a and a connecting portion 59b, respectively.
- the connecting portion 59a and the connecting portion 59b are configured so that the first section member 57a and the second section member 57b can be expanded and contracted in the Y direction, respectively.
- first section member 57a and the second section member 57b are each connected to the cylindrical portion 58.
- the cylindrical portion 58 is configured to be rotatable in the rotational direction around the center line 75 of the first leg portion 41a. Therefore, the connecting member 5 is configured so that the exciting portion 1 can be rotated around the first leg portion 41a. Further, the cylindrical portion 58 is configured to be movable in a direction along the first leg portion 41a. The inspector adjusts the position and rotation angle of the cylindrical portion 58 so that the exciting portion 1 is in a predetermined position with respect to the first leg portion 41a, and the position of the cylindrical portion 58 is fixed by the positioning member 42. , Inspect 90 to be inspected. In the example shown in FIG. 11, the first leg portion 41a is provided with the suction portion 12, but the contact member 13 (see FIG. 7) may be provided instead of the suction portion 12.
- the excitation portion 1 is rotated to excite the vehicle.
- the position of the part 1 can be adjusted.
- the plurality of leg portions 41 include an exciting leg portion 41d provided with the exciting portion 1 and a support leg portion 41e for supporting the holding member 4.
- the fifth modification assumes a case where the defect inspection device 100 is arranged and inspected with respect to the inspection target 90 in the Z2 direction (lower side in the vertical direction).
- the elastic wave can be excited by the exciting leg portion 41d and the holding member 4 can be supported by the support leg portion 41e by the configuration as described above.
- the burden on the inspector can be reduced.
- the holding member 4 and the exciting portion 1 are supported by the contact member 13, the inspector can inspect without supporting the holding member 4.
- the inspector can inspect without supporting the holding member 4.
- it is possible to reduce the burden on the inspector by comparing the configurations in which the holding member 4 is inspected while being supported by the inspector.
- the inspector can inspect without supporting the holding member 4, it is possible to prevent the inspector from giving vibration to the holding member 4.
- the excitation unit 1 is provided on any one of the plurality of leg portions 41 (first leg portion 41a) is shown, but the present invention is not limited to this.
- the exciting portion 1 may be provided on at least two leg portions 41 among the plurality of leg portions 41 via the connecting member 5.
- the excitation unit 1 is arranged on the first leg portion 41a and the second leg portion 41b.
- elastic waves can be propagated from a plurality of locations (two locations) by configuring as described above.
- elastic waves can be propagated from a plurality of different locations, and unlike the configuration in which elastic waves are propagated from one location, the weakening of vibration propagation increases the number of parts where it is difficult to detect defects. It can be suppressed.
- each of the plurality of leg portions 41 is provided with a light-shielding member 14 that covers the space 43 surrounded by the plurality of leg portions 41.
- the light-shielding member 14 is shown with hatching.
- the light-shielding member 14 is provided on each of the three legs 41.
- the four legs 41 are outside the four corners (four corners) of the inspection area 90a (see FIG. 2).
- the light-shielding member 14 may be provided so as to cover the four legs 41 at the time of imaging.
- the influence of external light such as sunlight can be removed when inspecting outdoors. Further, since it is possible to prevent the laser beam from leaking to the outside from the inspection area 90a (see FIG. 2), it is possible to prevent the inspector from looking into the laser beam. As a result, the safety of the inspector can be ensured.
- the exciting unit 1, the laser illumination 2, and the speckle-sharing interferometer 3 may be provided on the holding member 4 having a box shape. As shown in FIG. 15, when the holding member 4 having a box shape is used, the exciting portion 1 may be provided on the side surface of the holding member 4 via the connecting member 5.
- the present invention is not limited to this.
- the interference unit 30 and the image sensor 31 may be provided separately.
- the interferometer 30 may be configured by an interferometer other than the speckle-sharing interferometer 3.
- the defect inspection device 100 includes the vibration absorbing member 1c
- the present invention is not limited to this.
- the defect inspection device 100 does not have to include the vibration absorbing member 1c.
- the housing 1a of the excitation unit 1 and the vibrator 1b may be fixed with a resin material or the like.
- the excitation unit 1 used in contact with the surface of the inspection target 90 is used, but the present invention is not limited to this.
- a powerful speaker or the like placed at a position where it does not come into contact with the surface of the inspection target 90 may be used as the excitation unit 1.
- a window or various optical filters are provided on the optical path until the reflected light from the inspection target 90 is incident on the image sensor 31 for the purpose of protecting optical components and improving the SN ratio of the device. It may be arranged.
- the condenser lens 36 is arranged between the beam splitter 32 and the image sensor 31, but the present invention is not limited to this arrangement.
- the condenser lens 36 may be composed of a plurality of lenses or a plurality of lens groups.
- the present invention is not limited to this.
- the signal generator 7, the excitation unit 1, and the laser illumination 2 may be wirelessly connected.
- the holding member 4 may include or configure four legs 41.
- the number of legs 41 included in the holding member 4 may be any number.
- the connecting member 5 may have any shape.
- the exciting portion 1 may be connected to the first leg portion 41a by a string-shaped connecting member 5.
- the defect inspection device 100 may inspect a bridge or the like.
- the suction portion 12 may not be attracted to the bridge girder or the like, so it is preferable to provide the leg portion 41 with the contact member 13.
- An exciting part that excites elastic waves in the inspection target, Laser illumination that irradiates the inspection target with laser light, An interference unit that interferes with laser light reflected from different positions of the inspection target excited by the excitation unit, and an interference unit.
- An image pickup unit that captures the interfered laser beam, A holding member that holds the image pickup unit so that it can be arranged at a position separated from the inspection target by a predetermined distance.
- a connecting member that connects the holding member or the imaging unit and the excitation unit,
- a defect inspection apparatus including a control unit that generates an image relating to the propagation of an elastic wave to be inspected based on an interfered laser beam imaged by the image pickup unit.
- the holding member has an image pickup unit holding portion for holding the image pickup unit and a plurality of legs provided in the image pickup unit holding unit.
- the holding member has an image pickup unit holding portion for holding the image pickup unit and a plurality of legs provided in the image pickup unit holding unit.
- the excitation unit is provided on the leg portion so that when the leg portion is brought into contact with the inspection target, the leg portion comes into contact with the inspection target at a position in which a relative position with respect to the image pickup unit is preset. , Item 3 or 4.
- the excitation unit includes a housing, a vibrator, and a vibration absorbing member.
- the housing is connected to the legs via the connecting member, and is connected to the legs.
- the vibrator and the vibration absorbing member are provided inside the housing, and the vibrator and the vibration absorbing member are provided inside the housing.
- Item 3 The defect inspection device according to item 3 or 4, wherein the vibration absorbing member is provided between the housing and the vibrator.
- the plurality of legs are provided with a suction portion that supports the holding member by adsorbing to the inspection target, or a contact member that comes into contact with the inspection target.
- Item 3 The defect inspection device according to item 3 or 4, wherein the exciting portion is provided on the leg portion together with the suction portion or the contact member.
- the excitation unit is configured to excite the elastic wave with respect to the inspection target by supplying an electric current via a cable.
- each of the plurality of legs is provided with a light-shielding member that covers a space surrounded by the plurality of legs.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Acoustics & Sound (AREA)
- Optics & Photonics (AREA)
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
Abstract
この欠陥検査装置(100)は、励振部(1)と、レーザ照明(2)と、干渉部(30)と、撮像部(31)と、撮像部を検査対象(90)から所定の距離だけ離間した位置に配置可能に保持する保持部材(4)と、保持部材または撮像部と、励振部と、を接続する接続部材(5)と、検査対象の弾性波の伝播に関する画像(61)を生成する制御部(6)と、を備える。
Description
本発明は、欠陥検査装置に関する。
従来、欠陥検査装置が知られている。このような欠陥検査装置は、たとえば、特許第6451695号公報に開示されている。
上記特許第6451695号公報には、被検査物体に弾性波を励起する励振部と、被検査物体の表面の測定領域にストロボ照明の照射を行う照明部と、変位測定部とを備える欠陥検査装置が開示されている。変位測定部は、弾性波の位相とストロボ照明のタイミングとを制御することにより、弾性波の互いに異なる少なくとも3つの位相において測定領域各点の前後方向の変位を一括測定するように構成されている。この特許第6451695号公報の欠陥検査装置は、変位測定部によって測定領域各点の振動状態(振幅および位相)を撮像する。上記特許第6451695号公報の欠陥検査装置は、撮像した測定領域各点の振動状態に基づいて、振動の変位の相違を画像の明暗の相違で表した画像を作成する。上記特許第6451695号公報の欠陥検査装置は、作成した画像に対して、目視または画像処理を行うことにより、振動状態の不連続部を欠陥として検出する。
しかしながら、上記特許第6451695号公報に記載されている欠陥検査装置は、励振部と撮像部との相対位置が固定されていないと考えられる。そのため、検査毎に励振部と撮像部との相対位置が変化する可能性がある。励振部と撮像部との相対位置が変化すると、再測定などにより、同一の検査領域(撮像範囲)を検査する場合に、測定領域各点の振動状態が変化する可能性がある。測定領域各点の振動状態が変化すると、検査の再現性が乏しくなる。そこで、検査の再現性を向上させることが可能な欠陥検査装置が望まれている。
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、検査の再現性を向上させることが可能な欠陥検査装置を提供することである。
上記目的を達成するために、この発明の一の局面における欠陥検査装置は、検査対象に弾性波を励起する励振部と、検査対象にレーザ光を照射するレーザ照明と、励振部により励振された検査対象の互いに異なる位置から反射するレーザ光を干渉させる干渉部と、干渉されたレーザ光を撮像する撮像部と、撮像部を検査対象から所定の距離だけ離間した位置に配置可能に保持する保持部材と、保持部材または撮像部と、励振部と、を接続する接続部材と、撮像部により撮像した干渉されたレーザ光に基づいて、検査対象の弾性波の伝播に関する画像を生成する制御部と、を備える。
本発明の一の局面では、上記のように、保持部材または撮像部と、励振部と、を接続する接続部材を備える。上記接続部材を備えることにより、保持部材を介して、または、直接、励振部と撮像部とが接続されるので、励振部と撮像部との相対位置が変化することを抑制することができる。その結果、検査の再現性を向上させることが可能な欠陥検査装置を提供することができる。
以下、本発明を具体化した実施形態を図面に基づいて説明する。
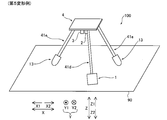
図1~図6を参照して、本発明の一実施形態による欠陥検査装置100の構成について説明する。
(欠陥検査装置の構成)
図1に示すように、欠陥検査装置100は、励振部1と、レーザ照明2と、スペックル‐シェアリング干渉計3と、保持部材4と、接続部材5と、制御部6と、信号発生器7と、表示部8と、操作入力部9と、真空ポンプ10とを備えている。
図1に示すように、欠陥検査装置100は、励振部1と、レーザ照明2と、スペックル‐シェアリング干渉計3と、保持部材4と、接続部材5と、制御部6と、信号発生器7と、表示部8と、操作入力部9と、真空ポンプ10とを備えている。
励振部1は、信号発生器7から電気信号を受信して、検査対象90に弾性波を励起する。励振部1が信号発生器7から受信する電気信号は、たとえば、交流のパルス信号を含む。励振部1は、検査対象90に接触するように配置され、信号発生器7からの交流電気信号を機械的振動に変換し、検査対象90に弾性波を励起する。励振部1の詳細な構成については、後述する。
レーザ照明2は、信号発生器7から電気信号を受信して、検査対象90にレーザ光を照射する。レーザ照明2は、図示しないレーザ光源と照明光レンズとを含んでいる。照明光レンズは、レーザ光源から照射されたレーザ光を検査対象90の表面の検査領域90a(図2参照)全体に拡げて照射する。
励振部1およびレーザ照明2は、信号発生器7にケーブル20を介して接続されている。
スペックル‐シェアリング干渉計3は、励振部1により励振された検査対象90の互いに異なる位置から反射するレーザ光を干渉させるように構成されている。スペックル‐シェアリング干渉計3の詳細な構成については、後述する。
保持部材4は、スペックル‐シェアリング干渉計3を検査対象90から所定の距離だけ離間した位置に配置可能に保持するように構成されている。また、保持部材4は、レーザ照明2を検査対象90から所定の距離だけ離間した位置に配置可能に構成されている。
また、保持部材4は、スペックル‐シェアリング干渉計3を保持する干渉計保持部40と、干渉計保持部40の設けられた複数の脚部41とを有している。励振部1は、接続部材5を介して、複数の脚部41のいずれかに設けられている。なお、干渉計保持部40は、請求の範囲の「撮像部保持部」の一例である。
また、複数の脚部41には、検査対象90に吸着することにより保持部材4を支持する吸着部12が設けられている。
接続部材5は、励振部1と保持部材4とを接続するために設けられる。具体的には、接続部材5の一方側の端面に励振部1が接続される。また、接続部材5の他方側の端面には、保持部材4が接続される。本実施形態では、接続部材5は、平板形状を有している。また、接続部材5は、保持部材4またはスペックル‐シェアリング干渉計3と、励振部1とを接続するように構成されている。図1に示す例では、接続部材5は、保持部材4と励振部1とを接続している。接続部材5の詳細な構成については、後述する。
制御部6は、スペックル‐シェアリング干渉計3を制御することにより、弾性波の伝播に関する画像61(図4参照)を生成するように構成されている。また、制御部6は、信号発生器7を制御することにより、励振部1に対して交流電気信号を送信するように構成されている。また、制御部6は、レーザ照明2に対して、電気信号を送信するように構成されている。また、制御部6は、電磁弁11を制御することにより、真空ポンプ10を用いて吸着部12の凹部12a(図6参照)の内部を減圧するように構成されている。制御部6は、CPU(Central Processing Unit)またはFPGA(Field Programmable Gate Array)などのプロセッサと、GPU(Graphics Processing Unit)と、揮発性および/または不揮発性メモリと、を含むコンピュータにより構成されている。
信号発生器7は、制御部6の制御の下、励振部1に対して送信する交流電気信号を生成するように構成されている。また、信号発生器7は、制御部6の制御の下、レーザ照明2に対して送信する電気信号を生成するように構成されている。
表示部8は、制御部6で作成された検査対象90における弾性波の伝播に関する画像61を表示するように構成されている。表示部8は、たとえば、液晶モニタを含む。
操作入力部9は、検査者の操作入力を受け付け可能に構成されている。操作入力部9は、たとえば、タッチパネルを含む。
真空ポンプ10は、制御部6の制御の下、吸着部12の凹部12a(図6参照)内の気体を吸引するように構成されている。真空ポンプ10によって吸着部12の凹部12a内の気体が吸引されることにより、吸着部12は、検査対象90に対して吸着するように構成されている。
本実施形態では、制御部6、信号発生器7、および、表示部8は、可搬型の制御装置110内に設けられている。制御装置110は、たとえば、図示しない背負子が設けられている。これにより、検査者は、制御装置110を背負った状態で、検査対象90の検査を実施することができる。また、真空ポンプ10は、制御装置110とともに持ち運びが可能なように、制御装置110に設けられている。
検査対象90は、たとえば、構造物である。具体的には、検査対象90は、航空機の機体である。より具体的には、具体的には、航空機の機体に用いられる、鋼板91に表面に塗膜92が塗装された塗装鋼板である。欠陥検査装置100は、検査対象90の欠陥を検査する。図1では、欠陥として、亀裂93および剥離94が発生した検査対象90を検査する例を示している。
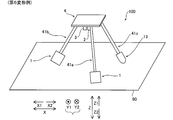
図2に示すように、本実施形態による欠陥検査装置100は、レーザ照明2およびスペックル‐シェアリング干渉計3と、検査対象90(検査領域90a)とが対向する向きに配置された状態において、検査対象90を検査するように構成されている。具体的には、欠陥検査装置100は、検査対象90の検査領域90aに対して、レーザ光を照射するように構成されている。
本実施形態では、保持部材4は、複数の脚部41として、第1脚部41aと、第2脚部41bと、第3脚部41cとを含む。励振部1は、複数の脚部41のうちのいずれかの脚部41に設けられている。図2に示す例では、励振部1は、第1脚部41aに設けられている。励振部1は、接続部材5を介して、第1脚部41aとの相対位置が実質的に固定された状態において、第1脚部41aに設けられている。
また、励振部1は、第1脚部41aを検査対象90に接触させた際に、スペックル‐シェアリング干渉計3に対する相対位置があらかじめ設定された位置で、検査対象90に接触するように、第1脚部41aに設けられている。なお、予め設定された位置とは、スペックル‐シェアリング干渉計3に対する励振部1の相対位置が、検査毎に略等しくなる位置のことである。
また、保持部材4には、把持部4aが設けられている。検査者は、把持部4aを把持した状態で、欠陥検査装置100を検査対象90に当接させ、操作入力部9を操作することによって、欠陥検査装置100を検査対象90に吸着させる。なお、吸着部12を介して、欠陥検査装置100を検査対象90に当接させた状態で固定できるので、検査者は、把持せずに検査を実施することが可能である。
(スペックル・シェアリング干渉計)
次に、図3を参照して、本実施形態におけるスペックル‐シェアリング干渉計3の構成について説明する。
次に、図3を参照して、本実施形態におけるスペックル‐シェアリング干渉計3の構成について説明する。
図3に示すように、スペックル‐シェアリング干渉計3は、干渉部30と、イメージセンサ31とを含む。干渉部30は、ビームスプリッタ32、位相シフタ33、第1反射鏡34、第2反射鏡35、集光レンズ36を含む。なお、イメージセンサ31は、請求の範囲の「撮像部」の一例である。
ビームスプリッタ32はハーフミラーであり、検査対象90の表面で反射されたレーザ光が入射される位置に配置される。
第1反射鏡34は、ビームスプリッタ32で反射されるレーザ光の光路上において、ビームスプリッタ32の反射面に対して、45度の角度となるように配置されている。
第2反射鏡35は、ビームスプリッタ32を透過するレーザ光の光路上において、ビームスプリッタ32の反射面に対して、45度の角度からわずかに傾斜した角度になるように配置されている。
位相シフタ33は、ビームスプリッタ32と第1反射鏡34との間に配置され、制御部6の制御により、透過するレーザ光の位相を変化(シフト)させるものである。位相シフタ33は、たとえば、光学部材を含む。位相シフタ33を構成する光学部材は、たとえば、透過するレーザ光の屈折率がそれぞれ異なる2つのレンズが一体化された複合レンズ対を含む。
イメージセンサ31は検出素子を多数有し、ビームスプリッタ32で反射された後に第1反射鏡34で反射されてビームスプリッタ32を透過するレーザ光60a、およびビームスプリッタ32を透過した後に第2反射鏡35で反射されてビームスプリッタ32で反射されるレーザ光60bの光路上に配置される。
集光レンズ36は、ビームスプリッタ32とイメージセンサ31の間に配置され、ビームスプリッタ32を透過したレーザ光60aとビームスプリッタ32で反射されたレーザ光60bとを集光させる。
検査対象90の表面上のA点95および第1反射鏡34で反射されるレーザ光60aと、検査対象90の表面上のB点96および第2反射鏡35で反射されるレーザ光60bとは、互いに干渉し、イメージセンサ31の同一箇所に入射する。
制御部6は、スペックル‐シェアリング干渉計3内に配置された位相シフタ33を図示しないアクチュエータで稼働させ、透過するレーザ光の位相を変化させる。これにより、A点95で反射されたレーザ光とB点96で反射されたレーザ光との位相差が変化する。これら2つのレーザ光が干渉した干渉光の強度をイメージセンサ31の各検出素子は検出する。
(弾性波の伝播に関する画像)
制御部6は、信号発生器7を介して、励振部1の振動とレーザ照明2のレーザ光の照射のタイミングとを制御し、位相シフト量を変化させながら、画像を撮影させる。位相シフト量はλ/4ずつ変化される。制御部6は、各位相シフト量(0、λ/4、λ/2、3λ/4)において、レーザ照射のタイミングj(j=0~7)分の32枚の画像を撮影させる。また、制御部6は、画像の撮影前と、各位相(0、λ/4、λ/2、3λ/4)の画像を撮像する間と、画像の撮影後とにおいて、消灯時の画像を合計5枚撮影させる。すなわち、制御部6は、合計37枚の画像を撮影させる。なお、λは、レーザ光の波長である。
制御部6は、信号発生器7を介して、励振部1の振動とレーザ照明2のレーザ光の照射のタイミングとを制御し、位相シフト量を変化させながら、画像を撮影させる。位相シフト量はλ/4ずつ変化される。制御部6は、各位相シフト量(0、λ/4、λ/2、3λ/4)において、レーザ照射のタイミングj(j=0~7)分の32枚の画像を撮影させる。また、制御部6は、画像の撮影前と、各位相(0、λ/4、λ/2、3λ/4)の画像を撮像する間と、画像の撮影後とにおいて、消灯時の画像を合計5枚撮影させる。すなわち、制御部6は、合計37枚の画像を撮影させる。なお、λは、レーザ光の波長である。
制御部6は、各検出素子からの検出信号を下記の手順で処理し、弾性波の伝播に関する画像61を取得する。
レーザ照射のタイミングj(j=0~7)が同じで位相シフト量がλ/4ずつ異なる画像(4枚ずつ)の輝度値Ij0~Ij3から、式(1)により、光位相(位相シフト量ゼロの時の、2光路間の位相差)Φjを求める。
Φj=-arctan{(Ij3-Ij1)/(Ij2-Ij0)}・・・(1)
光位相Φjに対して、最小二乗法により正弦波近似を行い、式(2)における近似係数A、θ、Cを求める。
Φj=Acos(θ+jπ/4)+C=Bexp(jπ/4)+C・・・(2)
ただし、Bは、複素振幅であり、式(3)のように、表される。
B=Aexp(iθ):複素振幅・・・(3)
ここで、複素振幅Bは、弾性波の伝播に関する画像61を出力するための基となる画像情報(複素振幅の二次元空間情報)である。式(2)から定数項Cを除いた近似式より、振動の各位相時刻ξ(0≦ξ<2π)における光位相変化を表示する動画像(30~60フレーム)を構成し、弾性波の伝播に関する画像61として出力する。なお、上記過程において、ノイズ除去のため複素振幅Bについて適宜空間フィルタが適用されてもよい。また、位相シフト量やレーザ照射タイミングのステップ(上記例ではそれぞれλ/4およびT/8、ただしTは振動の周期)はこれに限らない。この場合、計算式は上記式(1)~式(3)とは異なる式になる。
Φj=-arctan{(Ij3-Ij1)/(Ij2-Ij0)}・・・(1)
光位相Φjに対して、最小二乗法により正弦波近似を行い、式(2)における近似係数A、θ、Cを求める。
Φj=Acos(θ+jπ/4)+C=Bexp(jπ/4)+C・・・(2)
ただし、Bは、複素振幅であり、式(3)のように、表される。
B=Aexp(iθ):複素振幅・・・(3)
ここで、複素振幅Bは、弾性波の伝播に関する画像61を出力するための基となる画像情報(複素振幅の二次元空間情報)である。式(2)から定数項Cを除いた近似式より、振動の各位相時刻ξ(0≦ξ<2π)における光位相変化を表示する動画像(30~60フレーム)を構成し、弾性波の伝播に関する画像61として出力する。なお、上記過程において、ノイズ除去のため複素振幅Bについて適宜空間フィルタが適用されてもよい。また、位相シフト量やレーザ照射タイミングのステップ(上記例ではそれぞれλ/4およびT/8、ただしTは振動の周期)はこれに限らない。この場合、計算式は上記式(1)~式(3)とは異なる式になる。
検査対象90に欠陥が生じている場合、図4に示すように、弾性波の伝播に関する画像61において、振動状態が不連続な部分80および振動状態が不連続な部分81が生じる。検査者は、弾性波の伝播に関する画像61に生じた振動状態が不連続な部分80および不連続な部分81を確認することにより、検査対象90に欠陥が生じているか否かを把握することができる。なお、図4では、欠陥として、亀裂93が生じている場合に、振動状態が不連続な部分80が生じる例を示している。また、図4では、欠陥として、剥離94が生じている場合に、振動状態が不連続な部分81が生じる例を示している。
(励振部)
次に、図5を参照して、本実施形態における励振部1の構成について説明する。
次に、図5を参照して、本実施形態における励振部1の構成について説明する。
図5に示すように、励振部1は、筐体1aと、振動子1bと、振動吸収部材1cとによって構成されている。
筐体1aは、接続部材5を介して第1脚部41aに接続されている。具体的には、筐体1aは、励振部接続部材5aを介して接続部材5に接続されている。また、励振部接続部材5aは、ジョイント部5bを有している。筐体1aは、ジョイント部5bを中心として回動可能に励振部接続部材5aに設けられている。したがって、第1脚部41aが検査対象90に対して垂直でない場合でも、ジョイント部5bによって励振部1が回動することにより、励振部1を検査対象90に対して垂直に当接させることができる。
筐体1aの内部には、振動子1bおよび振動吸収部材1cが設けられている。振動子1bは、ケーブル20を介して電流が供給されるように構成されている。振動子1bは、供給された電流の電圧を変換することにより、振動子1bの振動面1eをX方向に振動させる。振動面1eを検査対象90に当接させることにより、振動子1bは、検査対象90に弾性波を励起するように構成されている。振動子1bは、たとえば、圧電素子を含む。
振動吸収部材1cは、励振部1とスペックル‐シェアリング干渉計3(イメージセンサ31)との間に設けられている。すなわち、振動吸収部材1cは、励振部1とイメージセンサ31との連結構造の途中に設けられている。具体的には、振動吸収部材1cは、筐体1aと振動子1bとの間に設けられている。振動吸収部材1cは、励振部1からの振動を吸収するために設けられている。振動吸収部材1cは、たとえば、弾性部材を含む。弾性部材は、たとえば、ばねである。振動吸収部材1cは、振動子1bの振動が、筐体1aに伝搬することを抑制することが可能なように、振動子1bの振動の振幅、周波数などに基づいて、適切なばね定数を有するばねによって構成される。
また、振動吸収部材1cは、振動子1bを矢印70の方向に付勢する付勢力を、振動子1bに印加するように構成されている。すなわち、図5に示す例では、振動吸収部材1cは、自然長から縮められた状態において、筐体1aと振動子1bとの間に配置される。
図6に示すように、励振部1は、吸着部12とともに、第1脚部41aに設けられている。具体的には、励振部1は、接続部材5を介して、複数の吸着部12とともに、第1脚部41aに設けられている。本実施形態では、励振部1は、2つの吸着部12の間に配置される。また、励振部1および複数の吸着部12は、Y方向に沿って並ぶように配置される。これにより、吸着部12が検査領域90a(図2参照)に配置されることを抑制することができる。
吸着部12は、凹部12aと、検査対象90に対して密着する密着部12bと、を有している。凹部12aは、開口側の端面が検査対象90と当接可能なように吸着部12に設けられている。密着部12bは、弾性部材によって構成されている。密着部12bは、たとえば、ゴムなどを含む。密着部12bは、凹部12aの開口側の端面の全周を取り囲むように設けられている。したがって、吸着部12を検査対象90に当接させた際に、凹部12aと、密着部12bと、検査対象90とによって、閉じた空間が形成される。また、吸着部12は、チューブ21を介して真空ポンプ10と接続されている。吸着部12は、チューブ21を介して真空ポンプ10によって上記閉じた空間内の気体が吸引されることにより、上記閉じた空間内が減圧され、検査対象90に吸着するように構成されている。
また、接続部材5は、吸着部接続部材5cを含む。吸着部12は、吸着部接続部材5cを介して接続部材5に接続されている。また、吸着部接続部材5cは、ジョイント部5dを有している。吸着部12は、ジョイント部5dを中心として回動可能に吸着部接続部材5cに設けられている。したがって、第1脚部41aが検査対象90に対して垂直でない場合でも、ジョイント部5dによって吸着部12が回動することにより、吸着部12を検査対象90に対して垂直に当接させることができる。そのため、吸着部12によって保持部材4を安定的に支持することができる。
また、本実施形態では、複数の脚部41は、中空の円筒形状を有している。また、接続部材5は、中空に形成されている。ケーブル20は、第1脚部41aの内部に収容されている。また、チューブ21は、第1脚部41aの内部に収容されている。
[本実施形態の効果]
本実施形態では、以下のような効果を得ることができる。
本実施形態では、以下のような効果を得ることができる。
本実施形態では、上記のように構成することにより、保持部材4を介して励振部1と撮像部(イメージセンサ31)とが接続されるので、励振部1と撮像部(イメージセンサ31)との相対位置が変化することを抑制することができる。その結果、検査の再現性を向上させることができる。
また、本実施形態では、上記のように、励振部1と撮像部(イメージセンサ31)との間に設けられ、励振部1からの振動を吸収する振動吸収部材1cをさらに備える。これにより、励振部1からの振動が撮像部(イメージセンサ31)に伝搬することを抑制することができる。その結果、励振部1からの振動によって撮像部(イメージセンサ31)が振動することを抑制することが可能となるので、撮像部(イメージセンサ31)が振動することによって弾性波の伝播に関する画像61にノイズが生じることを抑制することができる。
また、本実施形態では、上記のように、保持部材4は、撮像部(イメージセンサ31)を保持する撮像部保持部(干渉計保持部40)と、撮像部保持部(干渉計保持部40)に設けられた複数の脚部41とを有しており、励振部1は、接続部材5を介して、複数の脚部41のうちのいずれかの脚部41(第1脚部41a)に設けられている。これにより、励振部1と撮像部(イメージセンサ31)とが、接続部材5および第1脚部41aを介して接続されるため、撮像部(イメージセンサ31)に対する励振部1の相対位置が変化することを容易に抑制することができる。
また、本実施形態では、上記のように、励振部1は、第1脚部41aを検査対象90に接触させた際に、撮像部(イメージセンサ31)に対する相対位置があらかじめ設定された位置で、検査対象90に接触するように、第1脚部41aに設けられている。これにより、検査毎に励振部1と撮像部(イメージセンサ31)との相対位置が変化することを容易に抑制することができる。その結果、検査の再現性が低下することを抑制することができる。
また、本実施形態では、上記のように、励振部1は、筐体1aと、振動子1bと、振動吸収部材1cと、を含み、筐体1aは、接続部材5を介して第1脚部41aに接続されており、振動子1bおよび振動吸収部材1cは、筐体1aの内部に設けられており、振動吸収部材1cは、筐体1aと振動子1bとの間に設けられている。これにより、振動吸収部材1cによって、振動子1bからの振動が、筐体1aに伝搬することを抑制することができる。その結果、振動子1bからの振動が筐体1a、接続部材5および第1脚部41aを介して、撮像部(イメージセンサ31)に伝搬することを抑制することができる。また、振動吸収部材1cによって振動子1bを付勢することが可能となるので、振動子1bを検査対象90に対して密着させることができる。その結果、検査対象90が平面でない場合でも、検査対象90に対して弾性波を励起させることが可能となるので、検査精度を向上させることができる。
また、本実施形態では、上記のように、複数の脚部41には、検査対象90に吸着することにより保持部材4を支持する吸着部12が設けられており、励振部1は、吸着部12とともに第1脚部41aに設けられている。これにより、吸着部12によって保持部材4および励振部1が支持されるため、検査者が保持部材4を支持することなく検査することができる。その結果、保持部材4を検査者が支持しながら検査する構成を比較して、検査者の負担を軽減することができる。また、検査者が保持部材4を支持することなく検査することが可能となるので、検査者が保持部材4に対して振動を与えることを防止することができる。その結果、弾性波の伝播に関する画像61にノイズが生じることを抑制することができる。また、後述する第5変形例のように、Z2方向の検査対象90の検査を行う場合には、複数の脚部41に、検査対象90に当接する当接部材13が設けられており、励振部1は、当接部材13とともに第1脚部41aに設けてもよい。このように構成しても、上記励振部1を吸着部12とともに設ける構成と同様の効果を得ることができる。
また、本実施形態では、上記のように、励振部1は、複数の吸着部12とともに、第1脚部41aに設けられている。これにより、複数の吸着部12によって、励振部1を検査対象90に対して密着させることができる。したがって、検査者が励振部1を検査対象90に当接させて検査する構成と異なり、所定の吸着力によって、励振部1を検査対象90に密着させることができる。その結果、検査毎に励振部1の密着度合いが変化することを抑制することが可能となるので、検査の信頼性を向上させることができる。
また、本実施形態では、上記のように、励振部1は、ケーブル20を介して電流が供給されることにより検査対象90に対して弾性波を励起するように構成されており、ケーブル20は、第1脚部41aの内部に収容されている。これにより、たとえば、ケーブル20が第1脚部41aの内部に収容されていない構成と比較して、ケーブル20の引き回しが煩雑になることを抑制することができる。その結果、検査の作業性を向上させることができる。
[変形例]
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく請求の範囲によって示され、さらに請求の範囲と均等の意味および範囲内でのすべての変更(変形例)が含まれる。
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく請求の範囲によって示され、さらに請求の範囲と均等の意味および範囲内でのすべての変更(変形例)が含まれる。
(第1変形例)
たとえば、上記実施形態では、励振部1が吸着部12とともに接続部材5に設けられる構成の例を示したが、本発明はこれに限られない。たとえば、図7に示すように、励振部1は、当接部材13とともに第1脚部41aに設けられていてもよい。当接部材13は、たとえば、樹脂または弾性部材によって構成されている。また、励振部1が設けられていない第2脚部41bおよび第3脚部41cには、吸着部12が設けられている。
たとえば、上記実施形態では、励振部1が吸着部12とともに接続部材5に設けられる構成の例を示したが、本発明はこれに限られない。たとえば、図7に示すように、励振部1は、当接部材13とともに第1脚部41aに設けられていてもよい。当接部材13は、たとえば、樹脂または弾性部材によって構成されている。また、励振部1が設けられていない第2脚部41bおよび第3脚部41cには、吸着部12が設けられている。
欠陥検査装置100を用いて航空機の機体の側面を検査する場合には、第2脚部41bおよび第3脚部41cが上側(Z1側)となり、第1脚部41aが下側(Z2側)となるように、欠陥検査装置100を配置する。このように欠陥検査装置100を配置すれば、保持部材4に対して矢印71に示すようなモーメントが生じる。そのため、励振部1に対して、矢印72に示すように、検査対象90に付勢する力がかかる。したがって、励振部1とともに吸着部12を設けない構成であっても、検査対象90に対して励振部1を密着させることができる。
第1変形例では、上記のように構成することにより、励振部1を吸着部12とともに設ける構成と比較して、部品点数が増加することを抑制することができる。また、励振部1を吸着部12とともに設ける構成と比較して、励振部1に対して印加される力が大きくなることを抑制することができる。したがって、励振部1に対して印加される力によって、励振部1が検査対象90に必要以上に押し付けられ、励振部1から伝搬される弾性波の振幅が小さくなることを抑制することができる。その結果、弾性波の振幅が小さくなることに起因して検査の精度が低下することを抑制することができる。
(第2変形例)
また、上記実施形態では、励振部1を吸着部12とともに設ける構成の例を示したが、本発明はこれに限られない。たとえば、励振部1は、吸着部12の内部または外部に一体的に設けられていてもよい。具体的には、図8に示すように、励振部1を、吸着部12の凹部12aに設けることにより、励振部1を吸着部12の内部に一体的に構成する。なお、図8に示す例では、励振部1が吸着部12の内部に一体的に構成されているが、図9に示すように、励振部1は、吸着部12の外部に一体的に構成されていてもよい。具体的には、励振部1の内側の検査対象90に当接する面に凹み部1fを設け、その凹み部1f内を真空ポンプ10によって減圧することにより、吸着部12としてもよい。
また、上記実施形態では、励振部1を吸着部12とともに設ける構成の例を示したが、本発明はこれに限られない。たとえば、励振部1は、吸着部12の内部または外部に一体的に設けられていてもよい。具体的には、図8に示すように、励振部1を、吸着部12の凹部12aに設けることにより、励振部1を吸着部12の内部に一体的に構成する。なお、図8に示す例では、励振部1が吸着部12の内部に一体的に構成されているが、図9に示すように、励振部1は、吸着部12の外部に一体的に構成されていてもよい。具体的には、励振部1の内側の検査対象90に当接する面に凹み部1fを設け、その凹み部1f内を真空ポンプ10によって減圧することにより、吸着部12としてもよい。
第2変形例では、上記のように構成することにより、第1脚部41aに対して吸着部12とともに励振部1を設ける構成と比較して、第1脚部41aに取り付ける部品点数が増加することを抑制することができる。また、励振部1と吸着部12とを一体化することが可能となり、保持部材4の取り回しが煩雑化することを抑制することができる。
(第3変形例)
また、上記実施形態では、励振部1が、接続部材5を介して、第1脚部41aに対する相対位置が実質的に固定された状態で設けられる構成の例を示したが、本発明はこれに限られない。たとえば、接続部材5は、検査対象90に対する励振部1の接触する位置を調整可能に構成されていてもよい。
また、上記実施形態では、励振部1が、接続部材5を介して、第1脚部41aに対する相対位置が実質的に固定された状態で設けられる構成の例を示したが、本発明はこれに限られない。たとえば、接続部材5は、検査対象90に対する励振部1の接触する位置を調整可能に構成されていてもよい。
具体的には、図10に示すように、第3変形例では、接続部材5は、第1節部50と、第2節部51と、第3節部52とを含む。第1節部50および第2節部51は、伸縮可能に構成されている。
第1節部50は、ジョイント部53を介して第3節部52と接続している。第1節部50は、ジョイント部53を中心に回動可能に構成されている。また、第1節部50は、ジョイント部54を介して第1脚部41aと接続している。第1節部50は、ジョイント部54を中心に回動可能に構成されている。
第2節部51は、ジョイント部55を介して第3節部52と接続している。第2節部51は、ジョイント部55を中心に回動可能に構成されている。また、第2節部51は、ジョイント部56を介して第1脚部41aに接続されている。第2節部51は、ジョイント部56を中心に回動可能に構成されている。
第3節部52は、ジョイント部53を介して第1節部50と接続している。また、第3節部52は、ジョイント部55を介して第2節部51と接続している。また、第3節部52のジョイント部53とは反対側の端部には、励振部1が設けられている。
第1節部50と第2節部51とは、互いに平行になるように配置されている。第3節部52をX方向に移動させた場合、第1節部50と第2節部51とは、それぞれ、ジョイント部54およびジョイント部56を中心に回動する。これにより、第3節部52の検査対象90に対する角度を維持したまま、第3節部52をX方向に移動させることができる。したがって、接続部材5は、励振部1の検査対象90に対する角度を維持したまま、X方向における励振部1の位置を調整することができる。接続部材5は、いわゆるリンク機構として構成されている。
また、接続部材5は、励振部1を検査対象90に対して付勢する付勢部材5eを含む。付勢部材5eは、第2節部51と第1脚部41aとの間に設けられており、第2節部51を矢印73の方向に付勢している。付勢部材5eによる付勢力は、第2節部51および第3節部52を介して、矢印74の方向の付勢力として、励振部1に印加される。なお、図10に示す例では、第1脚部41aには、吸着部12が設けられているが、吸着部12の代わりに、当接部材13(図7参照)が設けられてもよい。
第3変形例では、上記のように接続部材5によって励振部1が検査対象90に接触する位置を調整可能に構成することにより、たとえば、検査対象90の表面に凹凸がある場合、または、検査対象90の表面が湾曲している場合であっても、検査対象90に対して励振部1を密着させることができる。その結果、励振部1によって、所定の弾性波を検査対象90に励起することが可能になるので、検査精度が低下することを抑制することができる。
また、上記のように、接続部材5が、励振部1を検査対象90に対して付勢する付勢部材5eを含むことにより、たとえば、検査対象90の表面が傾斜している場合であっても、付勢部材5eの付勢力によって、励振部1を検査対象90に対して容易に密着させることができる。その結果、励振部1によって、所定の弾性波を検査対象90に励起することが可能になるので、検査精度が低下することを容易に抑制することができる。
(第4変形例)
また、上記実施形態では、励振部1が、接続部材5を介して、第1脚部41aに対する相対位置が実質的に固定された状態で設けられる構成の例を示したが、本発明はこれに限られない。たとえば、接続部材5は、第1脚部41aを中心とする周方向に回転可能に構成されていてもよい。
また、上記実施形態では、励振部1が、接続部材5を介して、第1脚部41aに対する相対位置が実質的に固定された状態で設けられる構成の例を示したが、本発明はこれに限られない。たとえば、接続部材5は、第1脚部41aを中心とする周方向に回転可能に構成されていてもよい。
図11に示すように、第4変形例では、接続部材5は、第4節部57と、円筒部58とを含む。
第4節部57は、Y方向に延びる第1節部材57aおよび第2節部材57bと、X方向に延びる第3節部材57cを含む。第4節部57は、第1節部材57a、第2節部材57bおよび第3節部材57cを一体的に形成することにより形成される。また、第1節部材57aおよび第2節部材57bには、それぞれ、連結部59aおよび連結部59bが設けられている。連結部59aおよび連結部59bは、それぞれ、第1節部材57aおよび第2節部材57bをY方向に伸縮可能に構成されている。また、第1節部材57aと、第2節部材57bとは、それぞれ、円筒部58に接続されている。円筒部58は、第1脚部41aの中心線75周りの回転方向に回転可能に構成されている。したがって、接続部材5は、励振部1を、第1脚部41aを中心に回動可能に構成されている。また、円筒部58は、第1脚部41aに沿った方向に移動可能に構成されている。検査者は、第1脚部41aに対して励振部1が所定の位置となるように、円筒部58の位置および回転角度を調整し、位置決め部材42によって円筒部58の位置を固定した状態で、検査対象90の検査を実施する。なお、図11に示す例では、第1脚部41aには、吸着部12が設けられているが、吸着部12の代わりに、当接部材13(図7参照)が設けられてもよい。
第4変形例では、上記のように構成することにより、たとえば、励振部1と検査領域90aとの間に第1脚部41aが配置される場合でも、励振部1を回転させることにより、励振部1の位置を調整することができる。その結果、励振部1と検査領域90aとの間に第1脚部41aが配置されることを抑制することが可能となるので、検査領域90aに対して所定の弾性波を励起することができる。
(第5変形例)
また、上記実施形態では、吸着部12が複数の脚部41のそれぞれに設けられる構成の例を示したが、本発明はこれに限られない。たとえば、複数の脚部41に当接部材13を設けてもよい。
また、上記実施形態では、吸着部12が複数の脚部41のそれぞれに設けられる構成の例を示したが、本発明はこれに限られない。たとえば、複数の脚部41に当接部材13を設けてもよい。
図12に示すように、第5変形例では、複数の脚部41は、励振部1が設けられる励振脚部41dと、保持部材4を支持する支持脚部41eとを含む。なお、第5変形例は、Z2方向(鉛直方向の下側)にある検査対象90に対して、欠陥検査装置100を配置して検査する場合を想定している。
第5変形例では、上記のように構成することにより、励振脚部41dによって弾性波を励起するとともに、支持脚部41eによって保持部材4を支持することができる。その結果、吸着部12によって保持部材4を支持する構成を比較して、部品点数が増加することを抑制することができる。また、吸着部12を設ける構成と比較して、支持脚部41eのメンテナンスの頻度が増加することを抑制することが可能であるため、検査者の負担を軽減することができる。また、当接部材13によって保持部材4および励振部1が支持されるため、検査者が保持部材4を支持することなく検査することができる。その結果、保持部材4を検査者が支持しながら検査する構成を比較して、検査者の負担を軽減することができる。また、検査者が保持部材4を支持することなく検査することが可能となるので、検査者が保持部材4に対して振動を与えることを防止することができる。その結果、弾性波の伝播に関する画像61にノイズが生じることを抑制することができる。
また、上記実施形態では、複数の脚部41のうち、いずれか1脚部(第1脚部41a)に励振部1を設ける例を示したが、本発明はこれに限らない。たとえば、図13に示す第6変形例のように、励振部1は、接続部材5を介して、複数の脚部41のうちの少なくとも2つの脚部41に設けられていてもよい。図13に示す例は、第1脚部41aおよび第2脚部41bに励振部1が配置されている。
ここで、1箇所から弾性波を伝播させる構成では、欠陥が生じている箇所の先は、振動の伝播が弱まり、振動状態が不連続な部分80および81の検出が困難になる。そこで、第6変形例では、上記のように構成することにより、複数箇所(2箇所)から弾性波を伝播させることができる。その結果、弾性波を異なる複数箇所から伝播させることが可能となるので、1箇所から弾性波を伝播させる構成とは異なり、振動の伝播が弱まることによって欠陥の検出が困難になる部分が増加することを抑制することができる。
また、上記実施例では、複数の脚部41の間の空間を遮蔽するシートなどを設けない構成の例を示したが、本発明はこれに限らない。たとえば、図14に示す第7変形例のように、複数の脚部41の各々には、複数の脚部41に囲まれた空間43を覆う遮光部材14が設けられている。なお、図14に示す例では、便宜上、遮光部材14にハッチングを付して図示している。また、図14に示す例では、3つの脚部41の各々に遮光部材14を設けているが、たとえば、検査領域90a(図2参照)の4角(四隅)の外側に4つの脚部41を備え、撮像時には4つの脚部41を覆うように遮光部材14を設ける構成としてもよい。
第7変形例では、上記のように構成にすることにより、屋外などで検査する際に、太陽光などの外光の影響を除くことができる。また、レーザ光が検査領域90a(図2参照)から外部に漏れることを防止することが可能となるので、検査者がレーザ光を覗き込むことを防止することができる。その結果、検査者の安全を確保することができる。
(第8変形例)
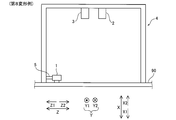
また、上記実施形態では、保持部材4が複数の脚部41を含む構成の例を示したが、本発明はこれに限られない。たとえば、箱型形状を有する保持部材4に対して、励振部1、レーザ照明2、および、スペックル‐シェアリング干渉計3を設けてもよい。図15に示すように、箱型形状を有する保持部材4を用いる場合、励振部1は、接続部材5を介して保持部材4の側面に設ければよい。
また、上記実施形態では、保持部材4が複数の脚部41を含む構成の例を示したが、本発明はこれに限られない。たとえば、箱型形状を有する保持部材4に対して、励振部1、レーザ照明2、および、スペックル‐シェアリング干渉計3を設けてもよい。図15に示すように、箱型形状を有する保持部材4を用いる場合、励振部1は、接続部材5を介して保持部材4の側面に設ければよい。
(その他の変形例)
また、上記実施形態では、干渉部30およびイメージセンサ31を含むスペックル‐シェアリング干渉計3を用いる構成の例を示したが、本発明はこれに限られない。たとえば、干渉部30およびイメージセンサ31は、別々に設けられていてもよい。また、スペックル‐シェアリング干渉計3以外の干渉計によって、干渉部30を構成してもよい。
また、上記実施形態では、干渉部30およびイメージセンサ31を含むスペックル‐シェアリング干渉計3を用いる構成の例を示したが、本発明はこれに限られない。たとえば、干渉部30およびイメージセンサ31は、別々に設けられていてもよい。また、スペックル‐シェアリング干渉計3以外の干渉計によって、干渉部30を構成してもよい。
また、上記実施形態では、欠陥検査装置100が振動吸収部材1cを含む構成の例を示したが、本発明はこれに限られない。たとえば、欠陥検査装置100は、振動吸収部材1cを備えていなくてもよい。欠陥検査装置100が振動吸収部材1cを備えていない構成の場合、励振部1の筐体1aと、振動子1bとを樹脂材などによって固定すればよい。
また、上記実施形態では、検査対象90の表面に接触させて使用する励振部1を用いたが、本発明はこれに限られない。たとえば、検査対象90の表面に接触させない位置に置かれた強力なスピーカ等を励振部1として用いてもよい。
また、本発明では、検査対象90からの反射光がイメージセンサ31へ入射するまでの光路上に、光学部品の保護や装置のSN比の向上等を目的として、ウィンドウや、種々の光学フィルタを配置してもよい。
また、上記実施形態では、集光レンズ36は、ビームスプリッタ32とイメージセンサ31の間に配置されているが、本発明は、この配置に限定されるものではない。本発明では、集光レンズ36は、複数のレンズまたは複数のレンズ群によって構成されるものでもよい。
また、上記実施形態では、信号発生器7と、励振部1およびレーザ照明2とが、ケーブル20(有線)を介して接続する構成の例を示したが、本発明はこれに限られない。本発明では、信号発生器7と励振部1、および、レーザ照明2とは、無線で接続されていてもよい。
また、上記実施形態では、保持部材4が3本の脚部41を含む構成の例を示したが、本発明はこれに限られない。たとえば、保持部材4は、4本の脚部41を含んでいても構成であってもよい。保持部材4が含む脚部41は、何本であってもよい。
また、上記実施形態では、接続部材5が平板形状を有する構成の例を示したが、本発明はこれに限られない。接続部材5はどのような形状を有していてもよい。たとえば、紐状の接続部材5によって、励振部1を第1脚部41aに接続する構成であってもよい。
また、上記実施形態では、欠陥検査装置100が、航空機の機体を検査する構成の例を示したが、本発明はこれに限られない。たとえば、欠陥検査装置100は、橋げたなどを検査してもよい。橋げたなどを検査する場合、吸着部12が橋げたなどに吸着しない可能性があるため、脚部41には、当接部材13を設ける構成が好ましい。
[態様]
上記した例示的な実施形態は、以下の態様の具体例であることが当業者により理解される。
上記した例示的な実施形態は、以下の態様の具体例であることが当業者により理解される。
(項目1)
検査対象に弾性波を励起する励振部と、
前記検査対象にレーザ光を照射するレーザ照明と、
前記励振部により励振された前記検査対象の互いに異なる位置から反射するレーザ光を干渉させる干渉部と、
干渉されたレーザ光を撮像する撮像部と、
前記撮像部を前記検査対象から所定の距離だけ離間した位置に配置可能に保持する保持部材と、
前記保持部材または前記撮像部と、前記励振部と、を接続する接続部材と、
前記撮像部により撮像した干渉されたレーザ光に基づいて、前記検査対象の弾性波の伝播に関する画像を生成する制御部と、を備える、欠陥検査装置。
検査対象に弾性波を励起する励振部と、
前記検査対象にレーザ光を照射するレーザ照明と、
前記励振部により励振された前記検査対象の互いに異なる位置から反射するレーザ光を干渉させる干渉部と、
干渉されたレーザ光を撮像する撮像部と、
前記撮像部を前記検査対象から所定の距離だけ離間した位置に配置可能に保持する保持部材と、
前記保持部材または前記撮像部と、前記励振部と、を接続する接続部材と、
前記撮像部により撮像した干渉されたレーザ光に基づいて、前記検査対象の弾性波の伝播に関する画像を生成する制御部と、を備える、欠陥検査装置。
(項目2)
前記励振部と前記撮像部との間に設けられ、前記励振部からの振動を吸収する振動吸収部材をさらに備える、項目1に記載の欠陥検査装置。
前記励振部と前記撮像部との間に設けられ、前記励振部からの振動を吸収する振動吸収部材をさらに備える、項目1に記載の欠陥検査装置。
(項目3)
前記保持部材は、前記撮像部を保持する撮像部保持部と、前記撮像部保持部に設けられた複数の脚部とを有しており、
前記励振部は、前記接続部材を介して、前記複数の脚部のうちのいずれかの脚部に設けられている、項目1または2に記載の欠陥検査装置。
前記保持部材は、前記撮像部を保持する撮像部保持部と、前記撮像部保持部に設けられた複数の脚部とを有しており、
前記励振部は、前記接続部材を介して、前記複数の脚部のうちのいずれかの脚部に設けられている、項目1または2に記載の欠陥検査装置。
(項目4)
前記保持部材は、前記撮像部を保持する撮像部保持部と、前記撮像部保持部に設けられた複数の脚部とを有しており、
前記励振部は、前記接続部材を介して、前記複数の脚部のうちの少なくとも2つの脚部に設けられている、項目1または2に記載の欠陥検査装置。
前記保持部材は、前記撮像部を保持する撮像部保持部と、前記撮像部保持部に設けられた複数の脚部とを有しており、
前記励振部は、前記接続部材を介して、前記複数の脚部のうちの少なくとも2つの脚部に設けられている、項目1または2に記載の欠陥検査装置。
(項目5)
前記励振部は、前記脚部を前記検査対象に接触させた際に、前記撮像部に対する相対位置があらかじめ設定された位置で、前記検査対象に接触するように、前記脚部に設けられている、項目3または4に記載の欠陥検査装置。
前記励振部は、前記脚部を前記検査対象に接触させた際に、前記撮像部に対する相対位置があらかじめ設定された位置で、前記検査対象に接触するように、前記脚部に設けられている、項目3または4に記載の欠陥検査装置。
(項目6)
前記励振部は、筐体と、振動子と、前記振動吸収部材と、を含み、
前記筐体は、前記接続部材を介して前記脚部に接続されており、
前記振動子および前記振動吸収部材は、前記筐体の内部に設けられており、
前記振動吸収部材は、前記筐体と前記振動子との間に設けられている、項目3または4に記載の欠陥検査装置。
前記励振部は、筐体と、振動子と、前記振動吸収部材と、を含み、
前記筐体は、前記接続部材を介して前記脚部に接続されており、
前記振動子および前記振動吸収部材は、前記筐体の内部に設けられており、
前記振動吸収部材は、前記筐体と前記振動子との間に設けられている、項目3または4に記載の欠陥検査装置。
(項目7)
前記複数の脚部には、前記検査対象に吸着することにより前記保持部材を支持する吸着部、または、前記検査対象に当接する当接部材が設けられており、
前記励振部は、前記吸着部、または、前記当接部材とともに前記脚部に設けられている、項目3または4に記載の欠陥検査装置。
前記複数の脚部には、前記検査対象に吸着することにより前記保持部材を支持する吸着部、または、前記検査対象に当接する当接部材が設けられており、
前記励振部は、前記吸着部、または、前記当接部材とともに前記脚部に設けられている、項目3または4に記載の欠陥検査装置。
(項目8)
前記励振部は、複数の前記吸着部とともに、前記脚部に設けられている、項目7に記載の欠陥検査装置。
前記励振部は、複数の前記吸着部とともに、前記脚部に設けられている、項目7に記載の欠陥検査装置。
(項目9)
前記励振部は、前記当接部材とともに、前記脚部に設けられており、
前記励振部が設けられていない前記脚部には、前記吸着部が設けられている、項目7に記載の欠陥検査装置。
前記励振部は、前記当接部材とともに、前記脚部に設けられており、
前記励振部が設けられていない前記脚部には、前記吸着部が設けられている、項目7に記載の欠陥検査装置。
(項目10)
前記励振部は、前記吸着部の内部または外部に一体的に設けられている、項目7に記載の欠陥検査装置。
前記励振部は、前記吸着部の内部または外部に一体的に設けられている、項目7に記載の欠陥検査装置。
(項目11)
前記接続部材は、前記検査対象に対する前記励振部の接触する位置を調整可能に構成されている、項目3または4に記載の欠陥検査装置。
前記接続部材は、前記検査対象に対する前記励振部の接触する位置を調整可能に構成されている、項目3または4に記載の欠陥検査装置。
(項目12)
前記接続部材は、前記励振部を前記検査対象に対して付勢する付勢部材を含む、項目11に記載の欠陥検査装置。
前記接続部材は、前記励振部を前記検査対象に対して付勢する付勢部材を含む、項目11に記載の欠陥検査装置。
(項目13)
前記接続部材は、前記脚部を中心とする周方向に回転可能に構成されている、項目11に記載の欠陥検査装置。
前記接続部材は、前記脚部を中心とする周方向に回転可能に構成されている、項目11に記載の欠陥検査装置。
(項目14)
前記励振部は、ケーブルを介して電流が供給されることにより前記検査対象に対して前記弾性波を励起するように構成されており、
前記ケーブルは、前記脚部の内部に収容されている、項目3または4に記載の欠陥検査装置。
前記励振部は、ケーブルを介して電流が供給されることにより前記検査対象に対して前記弾性波を励起するように構成されており、
前記ケーブルは、前記脚部の内部に収容されている、項目3または4に記載の欠陥検査装置。
(項目15)
前記複数の脚部は、前記励振部が設けられる励振脚部と、前記保持部材を支持する支持脚部とを含む、項目3または4に記載の欠陥検査装置。
前記複数の脚部は、前記励振部が設けられる励振脚部と、前記保持部材を支持する支持脚部とを含む、項目3または4に記載の欠陥検査装置。
(項目16)
前記複数の脚部の各々には、前記複数の脚部に囲まれた空間を覆う遮光部材が設けられている、項目3または4に記載の欠陥検査装置。
前記複数の脚部の各々には、前記複数の脚部に囲まれた空間を覆う遮光部材が設けられている、項目3または4に記載の欠陥検査装置。
1 励振部
1a 筐体
1b 振動子
1c 振動吸収部材
2 レーザ照明
4 保持部材
5 接続部材
5e 付勢部材
6 制御部
12 吸着部
13 当接部材
14 遮光部材
20 ケーブル
30 干渉部
31 イメージセンサ(撮像部)
40 干渉計保持部(撮像部保持部)
41 脚部(複数の脚部)
41a 第1脚部(複数の脚部)
41b 第2脚部(複数の脚部)
41c 第3脚部(複数の脚部)
41d 励振部脚部
41e 支持脚部
43 複数の脚部で囲まれた空間
61 弾性波の伝播に関する画像
90 検査対象
100 欠陥検査装置
1a 筐体
1b 振動子
1c 振動吸収部材
2 レーザ照明
4 保持部材
5 接続部材
5e 付勢部材
6 制御部
12 吸着部
13 当接部材
14 遮光部材
20 ケーブル
30 干渉部
31 イメージセンサ(撮像部)
40 干渉計保持部(撮像部保持部)
41 脚部(複数の脚部)
41a 第1脚部(複数の脚部)
41b 第2脚部(複数の脚部)
41c 第3脚部(複数の脚部)
41d 励振部脚部
41e 支持脚部
43 複数の脚部で囲まれた空間
61 弾性波の伝播に関する画像
90 検査対象
100 欠陥検査装置
Claims (16)
- 検査対象に弾性波を励起する励振部と、
前記検査対象にレーザ光を照射するレーザ照明と、
前記励振部により励振された前記検査対象の互いに異なる位置から反射するレーザ光を干渉させる干渉部と、
干渉されたレーザ光を撮像する撮像部と、
前記撮像部を前記検査対象から所定の距離だけ離間した位置に配置可能に保持する保持部材と、
前記保持部材または前記撮像部と、前記励振部と、を接続する接続部材と、
前記撮像部により撮像した干渉されたレーザ光に基づいて、前記検査対象の弾性波の伝播に関する画像を生成する制御部と、を備える、欠陥検査装置。 - 前記励振部と前記撮像部との間に設けられ、前記励振部からの振動を吸収する振動吸収部材をさらに備える、請求項1に記載の欠陥検査装置。
- 前記保持部材は、前記撮像部を保持する撮像部保持部と、前記撮像部保持部に設けられた複数の脚部とを有しており、
前記励振部は、前記接続部材を介して、前記複数の脚部のうちのいずれかの脚部に設けられている、請求項1または2に記載の欠陥検査装置。 - 前記保持部材は、前記撮像部を保持する撮像部保持部と、前記撮像部保持部に設けられた複数の脚部とを有しており、
前記励振部は、前記接続部材を介して、前記複数の脚部のうちの少なくとも2つの脚部に設けられている、請求項1または2に記載の欠陥検査装置。 - 前記励振部は、前記脚部を前記検査対象に接触させた際に、前記撮像部に対する相対位置があらかじめ設定された位置で、前記検査対象に接触するように、前記脚部に設けられている、請求項3または4に記載の欠陥検査装置。
- 前記励振部は、筐体と、振動子と、前記振動吸収部材と、を含み、
前記筐体は、前記接続部材を介して前記脚部に接続されており、
前記振動子および前記振動吸収部材は、前記筐体の内部に設けられており、
前記振動吸収部材は、前記筐体と前記振動子との間に設けられている、請求項3または4に記載の欠陥検査装置。 - 前記複数の脚部には、前記検査対象に吸着することにより前記保持部材を支持する吸着部、または、前記検査対象に当接する当接部材が設けられており、
前記励振部は、前記吸着部、または、前記当接部材とともに前記脚部に設けられている、請求項3または4に記載の欠陥検査装置。 - 前記励振部は、複数の前記吸着部とともに、前記脚部に設けられている、請求項7に記載の欠陥検査装置。
- 前記励振部は、前記当接部材とともに、前記脚部に設けられており、
前記励振部が設けられていない前記脚部には、前記吸着部が設けられている、請求項7に記載の欠陥検査装置。 - 前記励振部は、前記吸着部の内部または外部に一体的に設けられている、請求項7に記載の欠陥検査装置。
- 前記接続部材は、前記検査対象に対する前記励振部の接触する位置を調整可能に構成されている、請求項3または4に記載の欠陥検査装置。
- 前記接続部材は、前記励振部を前記検査対象に対して付勢する付勢部材を含む、請求項11に記載の欠陥検査装置。
- 前記接続部材は、前記脚部を中心とする周方向に回転可能に構成されている、請求項11に記載の欠陥検査装置。
- 前記励振部は、ケーブルを介して電流が供給されることにより前記検査対象に対して前記弾性波を励起するように構成されており、
前記ケーブルは、前記脚部の内部に収容されている、請求項3または4に記載の欠陥検査装置。 - 前記複数の脚部は、前記励振部が設けられる励振脚部と、前記保持部材を支持する支持脚部とを含む、請求項3または4に記載の欠陥検査装置。
- 前記複数の脚部の各々には、前記複数の脚部に囲まれた空間を覆う遮光部材が設けられている、請求項3または4に記載の欠陥検査装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US18/013,401 US20230251204A1 (en) | 2020-07-02 | 2020-07-02 | Defect inspection apparatus |
| CN202080103681.8A CN115997104A (zh) | 2020-07-02 | 2020-07-02 | 缺陷检查装置 |
| PCT/JP2020/026071 WO2022003916A1 (ja) | 2020-07-02 | 2020-07-02 | 欠陥検査装置 |
| JP2022532965A JP7444257B2 (ja) | 2020-07-02 | 2020-07-02 | 欠陥検査装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/026071 WO2022003916A1 (ja) | 2020-07-02 | 2020-07-02 | 欠陥検査装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022003916A1 true WO2022003916A1 (ja) | 2022-01-06 |
Family
ID=79315004
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/026071 WO2022003916A1 (ja) | 2020-07-02 | 2020-07-02 | 欠陥検査装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20230251204A1 (ja) |
| JP (1) | JP7444257B2 (ja) |
| CN (1) | CN115997104A (ja) |
| WO (1) | WO2022003916A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002177271A (ja) * | 2000-12-07 | 2002-06-25 | Ge Medical Systems Global Technology Co Llc | 超音波プローブ製造方法、超音波プローブ、および超音波撮像装置 |
| US20140118530A1 (en) * | 2012-10-31 | 2014-05-01 | The Boeing Company | Thermal Sound Inspection System |
| JP2014119441A (ja) * | 2012-12-19 | 2014-06-30 | Toshiba Corp | 超音波探傷装置及び方法 |
| JP2017219318A (ja) * | 2016-06-02 | 2017-12-14 | 株式会社島津製作所 | 欠陥検査方法及び欠陥検査装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4244172B2 (ja) | 2003-08-13 | 2009-03-25 | 株式会社Ihi | 高温用超音波探触子 |
| CN108088913B (zh) | 2018-01-09 | 2023-08-25 | 东莞理工学院 | 用于钢轨轨底探伤的压电超声导波探头及其探伤方法 |
| CN208872452U (zh) | 2019-01-08 | 2019-05-17 | 中国大唐集团新能源科学技术研究院有限公司 | 一种便携式风电机组用螺栓预紧力检测设备 |
-
2020
- 2020-07-02 JP JP2022532965A patent/JP7444257B2/ja active Active
- 2020-07-02 CN CN202080103681.8A patent/CN115997104A/zh active Pending
- 2020-07-02 US US18/013,401 patent/US20230251204A1/en active Pending
- 2020-07-02 WO PCT/JP2020/026071 patent/WO2022003916A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002177271A (ja) * | 2000-12-07 | 2002-06-25 | Ge Medical Systems Global Technology Co Llc | 超音波プローブ製造方法、超音波プローブ、および超音波撮像装置 |
| US20140118530A1 (en) * | 2012-10-31 | 2014-05-01 | The Boeing Company | Thermal Sound Inspection System |
| JP2014119441A (ja) * | 2012-12-19 | 2014-06-30 | Toshiba Corp | 超音波探傷装置及び方法 |
| JP2017219318A (ja) * | 2016-06-02 | 2017-12-14 | 株式会社島津製作所 | 欠陥検査方法及び欠陥検査装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230251204A1 (en) | 2023-08-10 |
| CN115997104A (zh) | 2023-04-21 |
| JP7444257B2 (ja) | 2024-03-06 |
| JPWO2022003916A1 (ja) | 2022-01-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10254252B2 (en) | Surface and subsurface detection sensor | |
| US6940602B2 (en) | Method and device for high-speed interferential microscopic imaging of an object | |
| KR101530898B1 (ko) | 저간섭성 주사 간섭계에서의 주사 오차 보정 | |
| WO2011016146A1 (ja) | 干渉顕微鏡及び測定装置 | |
| US11226294B2 (en) | Defect inspection apparatus | |
| WO2011105499A1 (ja) | レーザ超音波探傷装置 | |
| JP6183915B2 (ja) | 照明方法および顕微観察装置 | |
| WO2020213101A1 (ja) | 欠陥検査装置および欠陥検査方法 | |
| KR20220073765A (ko) | 이미징 및 간섭 측정을 위한 장치 및 방법 | |
| WO2022003916A1 (ja) | 欠陥検査装置 | |
| JP2005517177A (ja) | 組立デバイスにおける欠陥を検出するためのスペックル干渉計の使用 | |
| WO2006001712A2 (en) | Non-destructive testing of materials | |
| US20190072375A1 (en) | Optical image measuring apparatus | |
| KR101424840B1 (ko) | 광탄성 측정방법 및 그 장치 | |
| CN113167767A (zh) | 缺陷检查装置和缺陷检查方法 | |
| TWI723331B (zh) | 用於判定在基板上之目標結構之位置的裝置與方法 | |
| WO2022264362A1 (ja) | 欠陥検査システム、欠陥検査装置、および、欠陥検査方法 | |
| WO2022059710A1 (ja) | 欠陥検査装置 | |
| US20230062821A1 (en) | Defect inspection device and defect inspection method | |
| US5734471A (en) | Method of adjusting sample position in light wave interference apparatus | |
| US20220373363A1 (en) | Optical Microcavity Device, Alignment Structure for an Optical Device, and Method for Aligning an Optical Device | |
| JP6379031B2 (ja) | 波面歪み量測定装置、波面補償装置、光学測定装置、および方法 | |
| JP7480915B2 (ja) | 欠陥検査装置および欠陥検査方法 | |
| JP7099545B2 (ja) | 欠陥検査装置および欠陥検査方法 | |
| JP2002296020A (ja) | 表面形状測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20943161 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022532965 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20943161 Country of ref document: EP Kind code of ref document: A1 |