WO2021186680A1 - エレベーターの制御装置 - Google Patents
エレベーターの制御装置 Download PDFInfo
- Publication number
- WO2021186680A1 WO2021186680A1 PCT/JP2020/012351 JP2020012351W WO2021186680A1 WO 2021186680 A1 WO2021186680 A1 WO 2021186680A1 JP 2020012351 W JP2020012351 W JP 2020012351W WO 2021186680 A1 WO2021186680 A1 WO 2021186680A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- speed
- car
- brake
- command
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/32—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on braking devices, e.g. acting on electrically controlled brakes
Definitions
- This disclosure relates to an elevator control device.
- Patent Document 1 discloses an elevator.
- the brake 2 applies braking torque to the hoisting machine to control the rotation of the hoisting machine.
- An object of the present disclosure is to provide an elevator control device capable of suppressing the vibration of a car in speed control using a brake 2.
- the elevator control device is an elevator system that controls the ascent and descent of the car by the brake 2 in the hoisting machine.
- a speed detection unit for outputting and a speed control unit for determining the current command of the brake 2 based on the product of the deviation between the speed command and the detected speed and the absolute value of the deviation are provided.
- the control device determines the current command of the brake 2 based on the product of the deviation between the speed command and the detected speed and the absolute value of the deviation. Therefore, the vibration of the car can be suppressed in the speed control using the brake 2.
- FIG. 5 is a configuration diagram of an elevator system to which the elevator control device according to the first embodiment is applied.
- FIG. 5 is a configuration diagram of a brake of an elevator system to which an elevator control device according to the first embodiment is applied. It is a figure which shows the relationship between the braking current and the braking force of the brake of the elevator system to which the elevator control device in Embodiment 1 is applied. It is a figure which shows the result of the speed control by the brake of the elevator system to which the elevator control device in Embodiment 1 is applied. It is a figure which shows the control result by the control device of the elevator in Embodiment 1.
- FIG. It is a hardware block diagram of the control device of the elevator in Embodiment 1.
- FIG. 5 is a configuration diagram of an elevator system to which the elevator control device according to the second embodiment is applied. It is a figure which shows the control result by the control device of the elevator in Embodiment 2.
- FIG. It is a figure which shows the limit value of the current command by the control device of an elevator in Embodiment 3.
- FIG. It is a figure which shows the limit value of the acceleration by the control device of the elevator in Embodiment 4.
- FIG. It is a figure which shows the speed limit value by the control device of the elevator in Embodiment 4.
- FIG. 1 is a configuration diagram of an elevator system to which the elevator control device according to the first embodiment is applied.
- the hoisting machine 1 is provided in a machine room (not shown) or a hoistway (not shown).
- the pair of brakes 2 are provided on the outside of the hoisting machine 1.
- the main rope 3 is wound around the hoisting machine 1.
- the car 4 is provided inside the hoistway.
- the basket 4 is hung on one side of the main rope 3.
- the balance weight 5 is provided inside the hoistway.
- the balance weight 5 is hung on the other side of the main rope 3. That is, the car 4 and the counterweight 5 are connected by the main rope 3 in a slidable manner via the hoisting machine 1.
- the car 4 and the counterweight 5 move up and down by the rotation of the hoisting machine 1.
- the weight of the balanced weight 5 is often set so that the cage 4 and the balanced weight 5 are balanced when a load of 50% of the rated load capacity acts on the car 4.
- the weight of the counterweight 5 may be set so that the car 4 and the counterweight 5 are balanced when a load of 40% or 45% of the rated load capacity acts on the car 4.
- a weight imbalance between the basket 4 and the balancing weight 5 occurs except when the weight of the basket 4 and the weight of the balancing weight 5 are exactly the same. At this time, an unbalanced torque due to the weight difference acts on the hoisting machine 1. At this time, when the brake 2 is released, the car 4 moves up and down due to the unbalanced torque even if the hoisting machine 1 does not generate the torque for driving the car 4.
- the position detector 6 is provided on the hoisting machine 1.
- the position detector 6 is an optical encoder, a resolver, a magnetic sensor, or the like.
- the position detector 6 detects the rotation angle of the hoisting machine 1.
- the detected rotation angle is used for speed control and position control of the hoist 1.
- the rotation angle detected by the position detector 6 is used to determine the command signal of the brake 2.
- the control device 7 is provided in the machine room or the hoistway.
- the control device 7 includes a speed detection unit 8, a speed command generation unit 9, a speed control unit 10, and a current control unit 11.
- the speed detection unit 8 calculates the rotation speed of the hoisting machine 1 using the rotation angle of the hoisting machine 1 detected by the position detector 6. For example, the speed detection unit 8 calculates the rotation speed by the time derivative of the rotation angle. For example, the speed detection unit 8 smoothes the rotation speed by using a low-pass filter in order to remove noise due to time differentiation. For example, the speed detection unit 8 calculates the rotation speed at predetermined fixed time intervals. For example, the speed detection unit 8 calculates the rotation speed for each preset constant rotation angle after providing a configuration for measuring the time.
- the speed command generation unit 9 generates a rotation speed command of the hoisting machine 1 for guiding the car 4 to the target floor. For example, the speed command generation unit 9 generates a rotation speed command as an output of position control after including the position control system of the hoisting machine 1.
- the speed control unit 10 includes an absolute value calculator 10a, a multiplier 10b, and a controller 10c.
- the absolute value calculator 10a calculates the absolute value of the speed deviation, which is the difference between the speed command output of the speed command generation unit 9 and the detection speed output of the speed detection unit 8.
- the multiplier 10b multiplies the velocity deviation by the absolute value of the velocity deviation calculated by the absolute value calculation unit.
- the controller 10c calculates the current command of the brake 2 using the multiplication result of the speed deviation and its absolute value.
- Various control methods are used as the control method of the controller 10c. For example, as the control method of the controller 10c, any one of P control, PI control, and PID control is used.
- the current control unit 11 calculates the voltage command to the brake 2 by using the current command which is the output of the speed control unit 10 in various ways. For example, the current control unit 11 detects the current of the brake 2 and then generates a voltage command using the current command that is the output of the speed control unit 10.
- FIG. 2 is a configuration diagram of a brake of an elevator system to which the elevator control device according to the first embodiment is applied.
- the brake drum 12 is provided on a hoisting machine 1 (not shown in FIG. 2).
- the brake drum 12 serves as a braking surface of the brake 2.
- the brake 2 generates a braking torque that brakes the brake drum 12. As a result, the rotation of the hoisting machine 1 is braked by the brake 2.
- the brake 2 includes a brake shoe 13, a pressing spring 14, and an electromagnetic coil 15.
- the brake shoe 13 faces the brake drum 12.
- the pressing spring 14 generates a spring force that presses the brake shoe 13 against the brake drum 12.
- the electromagnetic coil 15 generates an attractive force in the direction in which the brake shoe 13 is separated from the brake drum 12.
- the value of the braking force of the brake 2 at this time is a value obtained by subtracting the suction force from the spring force.
- the attractive force becomes larger than the spring force.
- the brake shoe 13 separates from the brake drum 12. In this state, the braking force on the brake drum 12 does not act.
- the brake shoe 13 When the brake shoe 13 is open, the suction force is larger than the spring force for a while even if the current flowing through the electromagnetic coil 15 becomes small. Therefore, the brake shoe 13 does not move. When the value of the current becomes smaller than a certain value, the attractive force becomes smaller than the spring force. As a result, the brake shoe 13 falls so as to be pressed against the brake drum 12. As a result, the braking force on the brake drum 12 acts.
- FIG. 3 is a diagram showing the relationship between the braking current and the braking force of the brake of the elevator system to which the elevator control device according to the first embodiment is applied.
- the horizontal axis of FIG. 3 shows the current flowing through the electromagnetic coil 15.
- the vertical axis of FIG. 3 shows the braking force of the brake 2.
- the braking force of the brake 2 does not change until the value of the current becomes A.
- the braking force of the brake 2 decreases.
- the value of the current becomes B or more, the braking force of the brake 2 becomes 0.
- FIG. 4 is a diagram showing the result of speed control by the brake 2 of the elevator system to which the elevator control device according to the first embodiment is applied.
- FIG. 4 shows a control result when the output of the absolute value calculator 10a of FIG. 1 is 1.
- the control result is a control result when the speed control unit 10 is composed of only the controller 10c.
- the upper part of FIG. 4 shows the speed of the car 4.
- the lower part of FIG. 4 shows the current of the brake 2.
- the control device 7 increases the current of the brake 2. At this time, the brake 2 is sucked. Even if the braking force with respect to the brake drum 12 becomes 0, the acceleration of the car 4 is gradual.
- the car 4 accelerates so as to approach the speed command.
- the control device 7 drops the brake 2 to reduce the current of the brake 2 so that the unbalance torque becomes small.
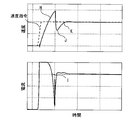
- FIG. 5 is a diagram showing a control result by the elevator control device in the first embodiment.
- the control device 7 increases the current of the brake 2. At this time, the brake 2 is sucked. Even if the braking force with respect to the brake drum 12 becomes 0, the acceleration of the car 4 is gradual.
- the car 4 accelerates so as to approach the speed command.
- the control device 7 drops the brake 2 to reduce the current of the brake 2 so that the unbalance torque becomes small.
- the absolute value of the velocity deviation is smaller than that at the time of the first acceleration. Therefore, the responsiveness of the controller 10c is low. As a result, the brake 2 is not sucked until the braking force with respect to the brake drum 12 becomes zero. In this case, the car 4 slowly re-accelerates. As a result, as shown by K in FIG. 5, the actual speed follows the speed command.
- the brake 2 is completely sucked. As a result, the braking force with respect to the brake drum 12 becomes zero. In this state, the car 4 accelerates. Therefore, the braking force with respect to the brake drum 12 becomes discontinuous due to the influence of hysteresis, but after that, the response of the speed of the car 4 does not become a sawtooth wave.
- the control device 7 calculates the current command of the brake 2 based on the product of the speed deviation between the speed command and the detected speed and the absolute value of the speed deviation.
- the absolute value of the speed deviation is equal to making the control gain of the controller 10c variable. Therefore, the responsiveness of the entire control system can be automatically changed according to the deviation between the speed command and the detection speed. For example, if the deviation between the speed command and the detection speed is large, the gain of the controller 10c becomes large, and the responsiveness can be improved. For example, if the deviation between the speed command and the detection speed is small, the gain of the controller 10c becomes small, and the responsiveness can be lowered.
- the hysteresis characteristic of the brake 2 is taken into consideration. Therefore, the vibration of the car 4 can be suppressed regardless of the load of the car 4. As a result, the car 4 can be operated without causing discomfort to the user.
- the car 4 can be moved by using the imbalance between the car 4 and the balance weight 5 and repeatedly dropping and sucking the brake 2 as in the bang-bang control.
- the pair of brakes 2 at that time The control results are different from each other. Therefore, the speed of the car 4 cannot be controlled in the same manner as in the present embodiment.
- feedback control is performed by observing the speed change of the car 4. Therefore, it is possible to provide more robust control against the influence of individual differences and temperature fluctuations of each of the pair of brakes 2.
- FIG. 6 is a hardware configuration diagram of the elevator control device according to the first embodiment.
- Each function of the control device 7 can be realized by a processing circuit.
- the processing circuit includes at least one processor 100a and at least one memory 100b.
- the processing circuit includes at least one dedicated hardware 200.
- each function of the control device 7 is realized by software, firmware, or a combination of software and firmware. At least one of the software and firmware is written as a program. At least one of the software and firmware is stored in at least one memory 100b. At least one processor 100a realizes each function of the control device 7 by reading and executing a program stored in at least one memory 100b. At least one processor 100a is also referred to as a central processing unit, a processing unit, an arithmetic unit, a microprocessor, a microcomputer, and a DSP.
- at least one memory 100b is a non-volatile or volatile semiconductor memory such as RAM, ROM, flash memory, EPROM, EEPROM, magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD, or the like.
- the processing circuit includes at least one dedicated hardware 200
- the processing circuit is realized by, for example, a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination thereof.
- NS each function of the control device 7 is realized by a processing circuit.
- each function of the control device 7 is collectively realized by a processing circuit.
- a part may be realized by the dedicated hardware 200, and the other part may be realized by software or firmware.
- the function of the speed control unit 10 is realized by a processing circuit as dedicated hardware 200, and the function other than the function of the speed control unit 10 is a program in which at least one processor 100a is stored in at least one memory 100b. It may be realized by reading and executing.
- the processing circuit realizes each function of the control device 7 by hardware 200, software, firmware, or a combination thereof.
- FIG. 7 is a configuration diagram of an elevator system to which the elevator control device according to the second embodiment is applied.
- the same or corresponding parts as those of the first embodiment are designated by the same reference numerals. The explanation of the relevant part is omitted.
- the control device 7 of the second embodiment is a device in which a feedback loop proportional to the speed is added to the speed control unit 10 with respect to the control device 7 of the first embodiment.
- the speed proportional feedback gain 10d multiplies the detection speed, which is the output of the speed detection unit 8, by the speed proportional gain K.
- the speed control unit 10 calculates the current command by subtracting the output of the speed proportional feedback gain 10d from the output of the controller 10c.
- the controller 10c When the speed of the car 4 is slow, the deviation between the speed command and the detection speed is large. Therefore, the controller 10c generates a large current command. At this time, the brake 2 is completely sucked. As a result, the braking force with respect to the brake drum 12 becomes zero. At this time, the car 4 accelerates.
- the controller 10c tries to generate a braking force on the brake drum 12 by reducing the current command.
- the brake 2 does not fall immediately due to the influence of hysteresis. Therefore, an overshoot occurs.
- the output of the speed proportional feedback gain 10d also increases. Therefore, the current command becomes small before a large overshoot occurs.
- the timing at which the brake 2 falls is earlier than when the speed proportional feedback gain 10d is not provided.
- the overshoot becomes smaller than when there is no speed proportional feedback gain 10d.
- the speed proportional feedback gain 10d is a term proportional to the speed. Therefore, the velocity proportional feedback gain 10d changes the damping coefficient of the entire control system. The faster the speed of the car 4, the higher the damping coefficient of the control system.
- under-damping an overshoot occurs for the command.
- critical attenuation no overshoot occurs for the command.
- over-attenuation the response is slower than critical attenuation without overshooting the command.
- the velocity proportional feedback gain 10d is set so that the damped vibration becomes critical damping or overdamping. As a result, the overshoot is small.
- FIG. 8 is a diagram showing a control result by the elevator control device according to the second embodiment.
- the speed proportional feedback gain 10d increases the attenuation in the control system. Therefore, the overshoot of the first acceleration of the car 4 is suppressed as compared with the response shown in FIG.
- the control device 7 increases the damping to cause an overshoot. Shave. Therefore, the vibration of the car 4 can be suppressed more reliably regardless of the load of the car 4. As a result, the car 4 can be operated without causing discomfort to the user.
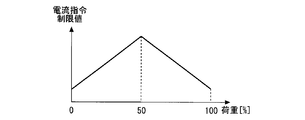
- FIG. 9 is a diagram showing a limit value of a current command by the elevator control device according to the third embodiment.
- the same or corresponding parts as those of the first embodiment are designated by the same reference numerals. The explanation of the relevant part is omitted.
- the speed control unit 10 calculates the current command of the brake 2 according to the speed deviation.
- the speed deviation between the speed command and the detected speed is large, the current command of the brake 2 also becomes large.
- the current value increases, the brake 2 is completely sucked. As a result, the braking force with respect to the brake drum 12 becomes zero.
- the state of the brake 2 does not change even if the current becomes larger. Therefore, even if an excessive current flows through the brake 2, not only the control performance of the brake 2 does not change, but also the brake 2 may break down. Therefore, in the third embodiment, the current command is limited.
- the horizontal axis in FIG. 9 is the load of the car 4.
- the vertical axis of FIG. 9 is the limit value of the current command.
- the current value may be smaller as the load of the car 4 goes from 50% to 0%.
- the current value may be smaller as the load of the cage 4 goes from 50% to 100%.
- the weight of the counterweight 5 is set so that the cage 4 and the counterweight 5 are balanced when 40% of the rated load capacity is in the car 4, the load of the car 4 is 40. When%, the unbalanced torque is minimized.
- the limit value of the current command shown in FIG. 9 can be considered.
- a weight 5 having a known weight is loaded on the car 4, the current of the brake 2 is gradually increased, and the position detector 6 detects that the car 4 has started to move.
- the information on the current value at that time and the information on the weight of the weight 5 may be stored in association with each other.
- the limit value of the current command of the brake 2 can be determined with respect to the load of the car 4.
- the stored current value is a current value when the speed calculated from the position detector 6 exceeds a preset value.
- the stored current value is a current value when the acceleration calculated from the position detector 6 exceeds a preset value.
- the load of the car 4 may be detected by using a weighing device, the current value corresponding to the load may be called as the limit value of the current command, and the current command may be limited. ..
- the control device 7 limits the current command. Therefore, it is possible to prevent the current command from becoming a current equal to or higher than B in FIG. As a result, the discontinuity between the suction and the drop of the brake 2 can be reduced.
- FIG. 10 is a diagram showing a limit value of acceleration by the elevator control device according to the fourth embodiment.
- FIG. 11 is a diagram showing a speed limit value by the elevator control device according to the fourth embodiment.
- the same or corresponding parts as those of the first embodiment are designated by the same reference numerals. The explanation of the relevant part is omitted.
- the speed control unit 10 calculates the current command of the brake 2 according to the speed deviation.
- the speed deviation between the speed command and the detected speed is large, the current command of the brake 2 also becomes large. Unless the speed deviation between the speed command and the detected speed becomes large, the current command does not become large.
- the magnitudes of the acceleration and the speed of the speed command are limited.
- the horizontal axis of FIG. 10 is the load of the car 4.
- the vertical axis of FIG. 10 shows the limit value of the acceleration of the speed command.
- the load of the car 4 is 100%, it indicates that the user with the rated load capacity is in the car 4.
- the acceleration of the speed command may be larger.
- the acceleration of the speed command may be smaller.
- the weight of the counterweight 5 is set so that the cage 4 and the counterweight 5 are balanced when 40% of the rated load capacity is in the car 4, the load of the car 4 is 40. When%, the unbalanced torque is minimized.
- Various methods for setting the acceleration of the speed command shown in FIG. 10 can be considered. For example, when installing an elevator, a weight 5 having a known weight is loaded on the car 4, the current of the brake 2 is gradually increased, and the position detector 6 detects that the car 4 has started to move. The acceleration information at that time and the weight information of the weight 5 may be stored in association with each other. As a result, the limit value of the acceleration of the speed command can be determined with respect to the load of the car 4. When the stored acceleration is actually used, the load of the car 4 may be detected by using a weighing device, the acceleration corresponding to the load may be called as the acceleration limit value of the speed command, and the speed command may be limited. ..
- the horizontal axis of FIG. 10 is the weight of the basket 4.
- the vertical axis of FIG. 10 shows the limit value of the speed command.
- the speed command may be increased as the load on the car 4 approaches 0% or 100%.
- the load of the car 4 may be detected by using a weighing device, the limit value of the speed command corresponding to the load may be called, and the speed command may be limited.
- the acceleration of the speed command and the magnitude of the speed command are limited. Therefore, it is possible to prevent the current command from becoming a value equal to or higher than B in FIG. As a result, the discontinuity between the suction and the drop of the brake 2 can be reduced.
- the two-to-one roping method or another roping method may be used.
- the number of brakes 2 may be changed from the first embodiment to the fourth embodiment.
- the position detector 6 may be provided in the car 4.
- the movement amount of the car 4 may be detected and the movement amount may be used to determine the command signal of the brake 2.
- the position detector 6 may be used as an absolute position sensor. Specifically, the movement of the car 4 may be detected by providing a magnetic tape, an ID tape, or the like on the hoistway side and providing a reading unit in the car 4. In this case as well, the movement amount of the car 4 may be detected and the movement amount may be used to determine the command signal of the brake 2.
- the elevator control device of the present disclosure can be used for the elevator system.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Elevator Control (AREA)
- Cage And Drive Apparatuses For Elevators (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202080098026.8A CN115210161B (zh) | 2020-03-19 | 2020-03-19 | 电梯的控制装置 |
| JP2022507969A JP7243919B2 (ja) | 2020-03-19 | 2020-03-19 | エレベーターの制御装置 |
| PCT/JP2020/012351 WO2021186680A1 (ja) | 2020-03-19 | 2020-03-19 | エレベーターの制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/012351 WO2021186680A1 (ja) | 2020-03-19 | 2020-03-19 | エレベーターの制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021186680A1 true WO2021186680A1 (ja) | 2021-09-23 |
Family
ID=77771986
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/012351 Ceased WO2021186680A1 (ja) | 2020-03-19 | 2020-03-19 | エレベーターの制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7243919B2 (https=) |
| CN (1) | CN115210161B (https=) |
| WO (1) | WO2021186680A1 (https=) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023100886A1 (ja) * | 2021-11-30 | 2023-06-08 | ニデック株式会社 | 信号生成装置およびエレベータ |
| JP7544199B1 (ja) | 2023-06-29 | 2024-09-03 | 三菱電機ビルソリューションズ株式会社 | エレベーターの制御装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022208618A1 (ja) * | 2021-03-29 | 2022-10-06 | 三菱電機株式会社 | エレベーター装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002225690A (ja) * | 2000-12-01 | 2002-08-14 | Denso Corp | 車両用ブレーキ装置 |
| JP2008168981A (ja) * | 2007-01-10 | 2008-07-24 | Hitachi Ltd | エレベーターブレーキ制御装置 |
| JP2013119436A (ja) * | 2011-12-06 | 2013-06-17 | Hitachi Ltd | エレベータ装置およびその制御方法 |
| US20170313550A1 (en) * | 2016-04-28 | 2017-11-02 | Kone Corporation | Solution for monitoring an elevator brake |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004028945A1 (ja) * | 2002-09-27 | 2004-04-08 | Mitsubishi Denki Kabushiki Kaisha | エレベータのブレーキ制御装置 |
| JP2007308231A (ja) * | 2006-05-17 | 2007-11-29 | Yaskawa Electric Corp | 昇降機用途向けインバータ装置とそのブレーキ制御方法 |
| WO2010095243A1 (ja) * | 2009-02-20 | 2010-08-26 | 三菱電機株式会社 | エレベータのブレーキ装置 |
| CN102325713A (zh) * | 2009-04-03 | 2012-01-18 | 三菱电机株式会社 | 电梯装置 |
| JP6390394B2 (ja) * | 2014-12-09 | 2018-09-19 | 株式会社明電舎 | エレベータ制御装置 |
| JP6581551B2 (ja) * | 2016-08-08 | 2019-09-25 | 株式会社日立製作所 | エレベーターシステム |
-
2020
- 2020-03-19 CN CN202080098026.8A patent/CN115210161B/zh active Active
- 2020-03-19 WO PCT/JP2020/012351 patent/WO2021186680A1/ja not_active Ceased
- 2020-03-19 JP JP2022507969A patent/JP7243919B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002225690A (ja) * | 2000-12-01 | 2002-08-14 | Denso Corp | 車両用ブレーキ装置 |
| JP2008168981A (ja) * | 2007-01-10 | 2008-07-24 | Hitachi Ltd | エレベーターブレーキ制御装置 |
| JP2013119436A (ja) * | 2011-12-06 | 2013-06-17 | Hitachi Ltd | エレベータ装置およびその制御方法 |
| US20170313550A1 (en) * | 2016-04-28 | 2017-11-02 | Kone Corporation | Solution for monitoring an elevator brake |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023100886A1 (ja) * | 2021-11-30 | 2023-06-08 | ニデック株式会社 | 信号生成装置およびエレベータ |
| JPWO2023100886A1 (https=) * | 2021-11-30 | 2023-06-08 | ||
| JP7544199B1 (ja) | 2023-06-29 | 2024-09-03 | 三菱電機ビルソリューションズ株式会社 | エレベーターの制御装置 |
| JP2025006359A (ja) * | 2023-06-29 | 2025-01-17 | 三菱電機ビルソリューションズ株式会社 | エレベーターの制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7243919B2 (ja) | 2023-03-22 |
| JPWO2021186680A1 (https=) | 2021-09-23 |
| CN115210161B (zh) | 2024-09-10 |
| CN115210161A (zh) | 2022-10-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021186680A1 (ja) | エレベーターの制御装置 | |
| JP5053075B2 (ja) | エレベータ装置 | |
| KR101657020B1 (ko) | 엘리베이터의 제어 장치 및 엘리베이터의 제어 방법 | |
| JP5659727B2 (ja) | クレーン振れ角検出方法及び装置、並びにクレーン振れ止め制御方法及び装置 | |
| JP7205645B2 (ja) | エレベーターの索条体の制振装置 | |
| EP2048103B1 (en) | Elevator device | |
| CN105314551B (zh) | 起重机械的配重控制方法和装置 | |
| JPWO2021186680A5 (https=) | ||
| JP2008133096A (ja) | エレベータ | |
| JP5079288B2 (ja) | エレベータ装置 | |
| JP7008839B2 (ja) | ガバナシステムの特性制御装置、及びエレベータ装置 | |
| CN1010002B (zh) | 带有无冲击起动调节装置的电梯驱动装置 | |
| JP6565762B2 (ja) | エレベータ装置の制御装置 | |
| CN100522781C (zh) | 电梯的控制系统 | |
| JP5746373B2 (ja) | エレベーターの制御装置およびその制御方法 | |
| KR102810874B1 (ko) | 엘리베이터 장치 | |
| JP7323078B2 (ja) | エレベーター | |
| WO2021240593A1 (ja) | エレベーターの着床制御システム | |
| JPH04308176A (ja) | エレベータの不平衡荷重補正値調整装置 | |
| JP2016111856A (ja) | エレベータ制御装置 | |
| JP2736056B2 (ja) | 電動機の速度制御装置 | |
| JP7544199B1 (ja) | エレベーターの制御装置 | |
| JP7184129B1 (ja) | エレベーターの制御装置及びエレベーターの制御方法 | |
| JP4949779B2 (ja) | エレベータ | |
| JPH11193190A (ja) | エレベータ速度制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20925025 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022507969 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20925025 Country of ref document: EP Kind code of ref document: A1 |