WO2020170602A1 - 車両用操向装置 - Google Patents
車両用操向装置 Download PDFInfo
- Publication number
- WO2020170602A1 WO2020170602A1 PCT/JP2019/050657 JP2019050657W WO2020170602A1 WO 2020170602 A1 WO2020170602 A1 WO 2020170602A1 JP 2019050657 W JP2019050657 W JP 2019050657W WO 2020170602 A1 WO2020170602 A1 WO 2020170602A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- unit
- torque
- value
- steering
- angle
- Prior art date
Links
Images























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/008—Control of feed-back to the steering input member, e.g. simulating road feel in steer-by-wire applications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/002—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels
- B62D6/003—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels in order to control vehicle yaw movement, i.e. around a vertical axis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
Definitions
- the present invention relates to a steering device for a vehicle.
- An electric power steering device which is one of the steering devices for vehicles, applies an assist force (steering assist force) to the steering system of the vehicle by the rotational force of the motor.
- the EPS applies a driving force of a motor controlled by electric power supplied from an inverter to a steering shaft or a rack shaft as an assist force by a transmission mechanism including a speed reduction mechanism.
- Patent Document 1 a vehicle steering system that avoids oversteering and understeering when traveling on a low ⁇ road to improve vehicle stability
- the tire will slip and the actual self-aligning torque of the tire will be reduced.
- the target steering torque is generated, the target steering torque and the actual self-aligning torque of the tire are different from each other in the configuration in which the actual steering torque is controlled to follow the target steering torque so as not to be affected by the condition of the road surface. There is a possibility that the driver may not notice the lack of grip of the tires and that the emergency avoidance operation may be delayed.
- the present invention has been made in view of the above problems, and an object of the present invention is to provide a steering device for a vehicle, which can feed back to a driver that the grip force of a tire is lost.
- a vehicle steering apparatus is a vehicle steering apparatus that assist-controls a steering system of a vehicle by drivingly controlling a motor that assists steering force.
- a target steering torque generation unit that generates a target steering torque of the motor, and the target steering torque generation unit has a torque signal corresponding to a steering angle and a vehicle speed and a predetermined proportional coefficient to a physical quantity generated by tire slip.
- the target steering torque is generated according to the difference value from the value multiplied by.
- the target steering torque generation unit generates the target steering torque by multiplying the torque signal by a torque adjustment coefficient value according to the difference value.
- the target steering torque generation unit decrease the torque adjustment coefficient value as the difference value increases.
- the torque adjustment coefficient value is preferably a positive value of 1 or less.
- the target steering torque can be set appropriately.
- the target steering torque generation unit subtracts a torque adjustment subtraction value corresponding to the difference value from the torque signal to generate the target steering torque.
- the target steering torque generation unit increase the torque adjustment subtraction value as the difference value increases.
- the torque adjustment subtraction value is smaller than the torque signal.
- the target steering torque can be set appropriately.
- the physical quantity is a self-aligning torque.
- the physical quantity is preferably a yaw rate.
- the physical quantity is preferably a current command value of the motor.
- FIG. 1 is a diagram showing a general configuration of an electric power steering device.
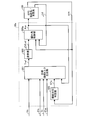
- FIG. 2 is a schematic diagram showing a hardware configuration of a control unit that controls the electric power steering device.
- FIG. 3 is a diagram showing an example of an internal block configuration of a control unit in the electric power steering device.
- FIG. 4 is a structural diagram showing an installation example of the steering angle sensor.
- FIG. 5 is a diagram illustrating an example of an internal block configuration of the control unit according to the first embodiment.
- FIG. 6 is an explanatory diagram of the steering direction.
- FIG. 7 is a flowchart showing an operation example of the control unit according to the first embodiment.
- FIG. 8 is a block diagram illustrating a configuration example of the target steering torque generation unit according to the first embodiment.
- FIG. 9 is a diagram showing a characteristic example of the basic map held by the basic map unit.
- FIG. 10 is a diagram showing a characteristic example of the damper gain map held by the damper gain map unit.
- FIG. 11 is a diagram showing a characteristic example of the hysteresis correction unit.
- FIG. 12 is a block diagram showing a configuration example of a low ⁇ road torque correction value calculation unit according to the first embodiment.
- FIG. 13 is a diagram showing changes in the actual self-aligning torque on the low ⁇ road.
- FIG. 14 is a diagram illustrating a characteristic example of a torque adjustment coefficient value map held by the torque adjustment coefficient value map unit according to the first embodiment.
- FIG. 15 is a diagram showing an example of the operation based on the torque adjustment coefficient value output from the low ⁇ road torque correction value calculation unit.
- FIG. 16 is a block diagram illustrating a configuration example of the twist angle control unit according to the first embodiment.
- FIG. 17 is a block diagram illustrating a configuration example of the target steering torque generation unit according to the first modification of the first embodiment.
- FIG. 18 is a block diagram showing a configuration example of a low ⁇ road torque correction value calculation unit according to the first modification of the first embodiment.
- FIG. 19 is a diagram showing a characteristic example of the torque adjustment subtraction value map held by the torque adjustment subtraction value map unit of the first modification of the first embodiment.
- FIG. 20 is a diagram showing an example of an internal block configuration of a control unit according to the second modification of the first embodiment.
- FIG. 21 is a block diagram showing a configuration example of a target steering torque generation unit according to the second modification of the first embodiment.
- FIG. 22 is a block diagram showing a configuration example of a low ⁇ road torque correction value calculation unit according to the second modification of the first embodiment.
- FIG. 23 is a block diagram illustrating a configuration example of the target steering torque generation unit according to the modified example 3 of the first embodiment.
- FIG. 24 is a block diagram showing a configuration example of a low ⁇ road torque correction value calculation unit according to Modification 3 of the first embodiment.
- FIG. 25 is a diagram showing an example of an internal block configuration of the control unit according to the second embodiment.
- FIG. 21 is a block diagram showing a configuration example of a target steering torque generation unit according to the second modification of the first embodiment.
- FIG. 22 is a block diagram showing a configuration example of a low ⁇ road torque
- FIG. 26 is a block diagram showing a configuration example of the target steering torque generation unit of the second embodiment.
- FIG. 27 is a block diagram showing a configuration example of the SAT information correction unit.
- FIG. 28 is an image diagram showing a state of torque generated between the road surface and the steering wheel.
- FIG. 29 is a diagram showing a characteristic example of the steering torque sensitive gain.
- FIG. 30 is a diagram showing a characteristic example of the vehicle speed response gain.
- FIG. 31 is a diagram showing a characteristic example of the steering angle response gain.
- FIG. 32 is a diagram illustrating an example of setting the upper limit value and the lower limit value of the torque signal in the limiting unit.
- FIG. 33 is a block diagram showing a configuration example of the twist angle control unit according to the second embodiment.
- FIG. 33 is a block diagram showing a configuration example of the twist angle control unit according to the second embodiment.
- FIG. 34 is a block diagram showing a configuration example of a target steering torque generation unit of a modified example of the second embodiment.
- FIG. 35 is a diagram showing a configuration example of the SBW system corresponding to the general configuration of the electric power steering device shown in FIG. 1.
- FIG. 36 is a block diagram showing the configuration of the third embodiment.
- FIG. 37 is a diagram illustrating a configuration example of the target turning angle generation unit.
- FIG. 38 is a diagram illustrating a configuration example of the turning angle control unit.
- FIG. 39 is a flowchart showing an operation example of the third embodiment.
- FIG. 40 is a block diagram showing a configuration example of a low ⁇ road torque correction value calculation unit according to the third embodiment.
- FIG. 41 is a block diagram showing a configuration example of a low ⁇ road torque correction value calculation unit according to a modification of the third embodiment.
- FIG. 1 is a diagram showing a general configuration of an electric power steering device.
- An electric power steering device which is one of vehicle steering devices, includes a column shaft (steering shaft, handle shaft) 2 of a steering wheel 1, a speed reduction mechanism 3, and a universal joint in the order in which a force applied from a steering wheel is transmitted.
- the column shaft 2 having a torsion bar is provided with a torque sensor 10 for detecting the steering torque Ts of the steering wheel 1 and a steering angle sensor 14 for detecting the steering angle ⁇ h, and a motor for assisting the steering force of the steering wheel 1 is provided.
- 20 is connected to the column shaft 2 via the reduction mechanism 3. Electric power is supplied from the battery 13 to the control unit (ECU) 30 that controls the electric power steering device, and an ignition key signal is input via the ignition key 11.
- the control unit 30 calculates the current command value of the assist (steering assistance) command based on the steering torque Ts detected by the torque sensor 10 and the vehicle speed Vs detected by the vehicle speed sensor 12, and compensates for the current command value.
- the current supplied to the motor 20 is controlled by the voltage control command value Vref that has been applied.
- An in-vehicle network such as a CAN (Controller Area Network) 40 that exchanges various vehicle information is connected to the control unit 30. Further, the control unit 30 can also be connected to a non-CAN 41 other than the CAN 40 that exchanges communication, analog/digital signals, radio waves, and the like.
- CAN Controller Area Network
- the control unit 30 is mainly composed of a CPU (including MCU, MPU, etc.).
- FIG. 2 is a schematic diagram showing a hardware configuration of a control unit that controls the electric power steering device.
- a control computer 1100 that constitutes the control unit 30 includes a CPU (Central Processing Unit) 1001, a ROM (Read Only Memory) 1002, a RAM (Random Access Memory) 1003, an EEPROM (Electrically Erasable Programmable ROM) 1004, and an interface (I/F). ) 1005, A/D (Analog/Digital) converter 1006, PWM (Pulse Width Modulation) controller 1007, etc., and these are connected to the bus.
- CPU Central Processing Unit
- ROM Read Only Memory
- RAM Random Access Memory
- EEPROM Electrical Erasable Programmable ROM
- I/F interface
- the CPU 1001 is a processing device that executes a control computer program (hereinafter referred to as a control program) for the electric power steering device to control the electric power steering device.
- a control program a control computer program for the electric power steering device to control the electric power steering device.
- ROM 1002 stores a control program for controlling the electric power steering device. Further, the RAM 1003 is used as a work memory for operating the control program.
- the EEPROM 1004 stores control data input/output by the control program. The control data is used in the control computer program loaded in the RAM 1003 after the control unit 30 is powered on, and is overwritten in the EEPROM 1004 at a predetermined timing.
- the ROM 1002, the RAM 1003, the EEPROM 1004, and the like are storage devices that store information, and are storage devices (primary storage device) that the CPU 1001 can directly access.
- the A/D converter 1006 inputs signals such as the steering torque Ts, the detected current value Im of the motor 20 and the steering angle ⁇ h, and converts them into digital signals.
- the interface 1005 is connected to the CAN 40.
- the interface 1005 is for receiving a signal (vehicle speed pulse) of the vehicle speed V from the vehicle speed sensor 12.
- the PWM controller 1007 outputs a PWM control signal for each UVW phase based on the current command value for the motor 20.
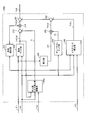
- FIG. 3 is a diagram showing an example of an internal block configuration of a control unit in the electric power steering device.
- the steering torque Ts and the vehicle speed Vs are input to the current command value calculation unit 31.
- the current command value calculation unit 31 refers to a lookup table (assist map or the like) stored in advance based on the steering torque Ts and the vehicle speed Vs, and the current command value Iref1 that is the control target value of the current supplied to the motor 20. Is calculated.
- the compensation signal generator 34 generates the compensation signal CM.
- the compensation signal generation unit 34 includes a convergence estimation unit 341, an inertia estimation unit 342, and a self aligning torque (SAT) estimation unit 343.
- the agility estimation unit 341 estimates the yaw rate of the vehicle based on the angular velocity of the motor 20, and brakes the movement of the steering wheel 1 to estimate the compensation value for improving the agility of the yaw of the vehicle.
- the inertia estimation unit 342 estimates the inertial force of the motor 20 based on the angular acceleration of the motor 20, and estimates a compensation value for compensating the inertial force of the motor 20 in order to improve responsiveness.
- the SAT estimation unit 343 estimates the self-aligning torque T SAT based on the steering torque Ts, the assist torque, the angular velocity and the angular acceleration of the motor 20, and uses the self-aligning torque as a reaction force to obtain a compensation value for compensating the assist torque.
- the compensation signal generation unit 34 may include an estimation unit that estimates another compensation value, in addition to the convergence convergence unit 341, the inertia estimation unit 342, and the SAT estimation unit 343.
- the addition section 344 adds the compensation value of the inertia estimation section 342 and the compensation value of the SAT estimation section 343, and the addition value and the compensation value of the convergence point estimation section 341 are added in the addition section 345. It is the added value.
- the self-aligning torque T SAT estimated by the SAT estimation unit 343 is also output to the target steering torque generation unit 200 described below.
- the compensation signal CM from the compensation signal generation unit 34 is added to the current command value Iref1, and by addition of the compensation signal CM, the current command value Iref1 is compensated for the characteristics of the steering system system, and the convergence and It is designed to improve inertia characteristics and the like. Then, the current command value Iref1 becomes the characteristic-compensated current command value Iref2 via the adding unit 32A, and the current command value Iref2 is input to the current limiting unit 33.
- the current limiter 33 limits the maximum current of the current command value Iref2 and generates the current command value Irefm.
- the current command value Irefm is input to the subtraction unit 32B, and the deviation I(Irefm-Im) from the current detection value Im fed back from the motor 20 side is calculated by the subtraction unit 32B.
- the deviation I is input to the PI control unit 35 for improving the characteristic of the steering operation.
- the voltage control command value Vref whose characteristics have been improved by the PI control unit 35 is input to the PWM control unit 36, and the motor 20 is PWM-driven via the inverter circuit 37 as the motor driving unit.
- the detected current value Im of the motor 20 is detected by the current detector 38 and fed back to the subtractor 32B.
- the inverter circuit 37 uses a field effect transistor (hereinafter, referred to as FET) as a drive element and is configured by a bridge circuit of FET.
- FET field effect transistor
- the steering torque applied by the driver's manual input is detected by the torque sensor as the torsion torque of the torsion bar, and the motor current is mainly detected as the assist current corresponding to the torque.
- the steering torque may be different depending on the steering angle due to the difference in the road surface state (for example, inclination). Steering torque may also be affected by variations in motor output characteristics over time.
- FIG. 4 is a structural diagram showing an installation example of the rudder angle sensor.
- the column shaft 2 is provided with a torsion bar 2A.
- Road surface reaction force Rr and road surface information (road surface frictional resistance ⁇ ) act on the steered wheels 8L and 8R.
- An upper angle sensor is provided on the handle side of the column shaft 2 with the torsion bar 2A interposed therebetween.
- a lower angle sensor is provided on the steering wheel side of the column shaft 2 with the torsion bar 2A interposed therebetween.
- the upper angle sensor detects the steering wheel angle ⁇ 1
- the lower angle sensor detects the column angle ⁇ 2 .
- the steering angle ⁇ h is detected by a steering angle sensor provided above the column shaft 2.
- the torsion angle ⁇ of the torsion bar is expressed by the following equation (1) from the deviation between the steering wheel angle ⁇ 1 and the column angle ⁇ 2 . Further, the torsion bar torque Tt is expressed by the following expression (2) by using the torsion angle ⁇ of the torsion bar expressed by the expression (1). Note that Kt is the spring constant of the torsion bar 2A.
- the torsion bar torque Tt can also be detected using a torque sensor.
- the torsion bar torque Tt is also treated as the steering torque Ts.
- FIG. 5 is a diagram showing an example of an internal block configuration of the control unit according to the first embodiment.
- the control unit 30 includes a target steering torque generation unit 200, a torsion angle control unit 300, a steering direction determination unit 400, and a conversion unit 500 as internal block configurations.
- steering of the driver's steering wheel is assist-controlled by the motor 20 of the EPS steering system/vehicle system 100.
- the EPS steering system/vehicle system 100 includes an angle sensor, an angular velocity calculation unit, and the like in addition to the motor 20.
- the target steering torque generation unit 200 generates a target steering torque Tref which is a target value of the steering torque when assist control of the steering system of the vehicle in the present disclosure.
- the conversion unit 500 converts the target steering torque Tref into the target twist angle ⁇ ref.
- the torsion angle control unit 300 generates a motor current command value Iref which is a control target value of a current supplied to the motor 20.
- the twist angle control unit 300 calculates a motor current command value Iref such that the twist angle ⁇ becomes the target twist angle ⁇ ref.
- the motor 20 is driven by the motor current command value Iref.
- the steering direction determination unit 400 determines whether the steering direction is right turn or left turn based on the motor angular velocity ⁇ m output from the EPS steering system/vehicle system 100, and outputs the determination result as a steering state signal STs.
- FIG. 6 is an explanatory diagram of the steering direction.
- the steering state indicating whether the steering direction is right-turn or left-turn can be obtained from the relationship between the steering angle ⁇ h and the motor angular velocity ⁇ m as shown in FIG. 6, for example. That is, when the motor angular velocity ⁇ m has a positive value, it is determined as “right cut”, and when the motor angular velocity ⁇ m has a negative value, it is determined as “left cut”.
- an angular velocity calculated by performing a velocity calculation on the steering angle ⁇ h, the steering wheel angle ⁇ 1 or the column angle ⁇ 2 may be used.
- the conversion unit 500 converts the target steering torque Tref generated by the target steering torque generation unit 200 into the target twist angle ⁇ ref by using the relationship of the equation (2).
- FIG. 7 is a flowchart showing an operation example of the control unit according to the first embodiment.
- the steering direction determination unit 400 determines whether the steering direction is right-turn or left-turn based on the sign of the motor angular velocity ⁇ m output from the EPS steering system/vehicle system 100, and uses the determination result as the steering state signal STs to set the target steering. It is output to the torque generator 200 (step S10).
- the target steering torque generation unit 200 generates the target steering torque Tref based on the vehicle speed Vs, the vehicle speed determination signal Vfail, the steering state signal STs, the steering angle ⁇ h, and the actual yaw rate ⁇ re (step S20).
- the conversion unit 500 converts the target steering torque Tref generated by the target steering torque generation unit 200 into a target twist angle ⁇ ref (step S20).
- the target twist angle ⁇ ref is output to the twist angle control unit 300.
- the twist angle control unit 300 calculates the motor current command value Iref based on the target twist angle ⁇ ref, the steering angle ⁇ h, the twist angle ⁇ , and the motor angular velocity ⁇ m (step S30).
- step S40 current control is performed based on the motor current command value Iref output from the torsion angle control unit 300, and the motor 20 is driven (step S40).
- FIG. 8 is a block diagram showing a configuration example of the target steering torque generation unit of the first embodiment.
- the target steering torque generation unit 200 includes a basic map unit 210, a multiplication unit 211, a code extraction unit 213, a differentiation unit 220, a damper gain map unit 230, a hysteresis correction unit 240, and a SAT information correction unit 250.
- a multiplication unit 260, addition units 261, 262, 263, and a low ⁇ road torque correction value calculation unit 280 are provided.
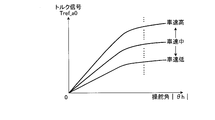
- FIG. 9 is a diagram showing a characteristic example of the basic map held by the basic map unit.
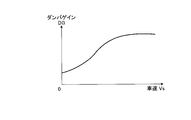
- FIG. 10 is a diagram showing a characteristic example of the damper gain map held by the damper gain map unit.
- the steering angle ⁇ h and the vehicle speed Vs are input to the basic map unit 210.
- the basic map unit 210 outputs the torque signal Tref_a0 with the vehicle speed Vs as a parameter, using the basic map shown in FIG. That is, the basic map section 210 outputs the torque signal Tref_a0 according to the vehicle speed Vs.
- the torque signal Tref_a0 has a characteristic of increasing as the magnitude (absolute value)
- the map is configured according to the magnitude
- a mode will be described in which the torque signal Tref_a0 that is a positive value according to the magnitude
- the code extraction unit 213 extracts the code of the steering angle ⁇ h. Specifically, for example, the value of the steering angle ⁇ h is divided by the absolute value of the steering angle ⁇ h. As a result, the code extraction unit 213 outputs "1" when the sign of the steering angle ⁇ h is "+”, and outputs "-1" when the sign of the steering angle ⁇ h is "-".
- the steering angle ⁇ h is input to the differentiator 220.
- the differentiator 220 differentiates the steering angle ⁇ h to calculate the steering angular velocity ⁇ h, which is angular velocity information.
- the differentiating unit 220 outputs the calculated steering angular velocity ⁇ h to the multiplying unit 260.
- the vehicle speed Vs is input to the damper gain map unit 230.
- the damper gain map unit 230 outputs a damper gain D G according to the vehicle speed Vs using the vehicle speed sensitive damper gain map shown in FIG. 10.
- the damper gain D G has a characteristic that it gradually increases as the vehicle speed Vs increases.
- the damper gain D G may be variable according to the steering angle ⁇ h.
- Multiplying unit 260 with respect to the steering angular velocity ⁇ h outputted from the differentiating unit 220, multiplies the damper gain D G outputted from the damper gain map 230, and outputs the result to adding section 262 as a torque signal Tref_b.
- the steering direction determination unit 400 makes a determination as shown in FIG. 6, for example.
- the steering angle ⁇ h, the vehicle speed Vs, and the steering state signal STs that is the determination result shown in FIG. 6 are input to the hysteresis correction unit 240.
- the hysteresis correction unit 240 calculates the torque signal Tref_c using the following equations (3) and (4) based on the steering angle ⁇ h and the steering state signal STs.
- x is the steering angle ⁇ h
- y R Tref_c
- the coefficient a is a value larger than 1
- the coefficient c is a value larger than 0.
- the coefficient Ahys indicates the output width of the hysteresis characteristic
- the coefficient c is a coefficient indicating the roundness of the hysteresis characteristic.
- the torque signal Tref_c(y R ) is calculated using the above equation (3).
- the torque signal Tref_c(y L ) is calculated using the equation (4). It should be noted that when switching from right-turn steering to left-turn steering or when switching from left-turn steering to right-turn steering, the final coordinates (x 1 , y 1 ) of the previous values of the steering angle ⁇ h and the torque signal Tref_c. Based on the value of, the coefficient b or b′ shown in the following formula (5) or formula (6) is substituted into the formulas (3) and (4) after the steering is switched. Thereby, the continuity before and after the steering switching is maintained.
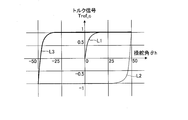
- FIG. 11 is a diagram showing a characteristic example of the hysteresis correction unit.
- the characteristic example of the torque signal Tref_c whose hysteresis has been corrected when the steering is performed at [deg] is shown.
- the torque signal Tref_c output from the hysteresis correction unit 240 has hysteresis characteristics such as 0 origin ⁇ L1 (thin line) ⁇ L2 (broken line) ⁇ L3 (thick line).
- the coefficient Ahys that represents the output width of the hysteresis characteristic and the coefficient c that represents the roundness may be variable according to one or both of the vehicle speed Vs and the steering angle ⁇ h.
- the steering angular velocity ⁇ h is obtained by a differential calculation with respect to the steering angle ⁇ h, but a low pass filter (LPF) process is appropriately performed to reduce the influence of noise in the high frequency range. Further, the differential calculation and the LPF processing may be performed using a high pass filter (HPF) and a gain. Further, the steering angular velocity ⁇ h may be calculated by performing the differential calculation and the LPF process on the steering wheel angle ⁇ 1 detected by the upper angle sensor or the column angle ⁇ 2 detected by the lower angle sensor, instead of the steering angle ⁇ h. .. Instead of the steering angular velocity ⁇ h, the motor angular velocity ⁇ m may be used as the angular velocity information, and in this case, the differentiating unit 220 is unnecessary.
- LPF low pass filter
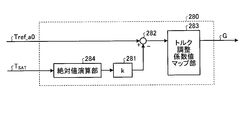
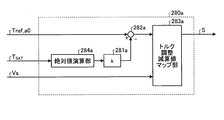
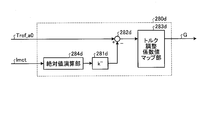
- FIG. 12 is a block diagram showing a configuration example of a low ⁇ road torque correction value calculation unit according to the first embodiment.
- the low ⁇ road torque correction value calculation unit 280 outputs the torque signal Tref_a0 output from the basic map unit 210 (see FIG. 8) and the SAT estimation unit 343 (see FIG. 3).
- the self-aligning torque T SAT is input.
- FIG. 13 is a diagram showing changes in the actual self-aligning torque on a low ⁇ road.
- the actual self-aligning torque of the tire rises as the steering angle ⁇ h magnitude (absolute value)
- This SAT value is substantially proportional to the torque signal Tref_a0 output from the basic map unit 210 in a normal traveling state.
- the proportional coefficient of the SAT value with respect to the torque signal Tref_a0 is referred to as “k”.
- the “normal running state” refers to a state in which the tire grips the road surface.
- the torque signal Tref_a0 output from the basic map unit 210 and the value obtained by multiplying the SAT value by the proportional coefficient k deviate. That is, if the steering force of the steering wheel is controlled in the same way as in a normal running state, even though the tire grip is lost, the driver does not notice that the tire grip force is lost, and the emergency avoidance operation is performed. May be delayed.
- the driver is allowed to perform an emergency avoidance operation by feeding back to the driver that the grip force of the tire has been lost based on the physical quantity generated by the slip of the tire.
- T SAT estimated by the SAT estimation unit 343 see FIG. 3
- the low ⁇ road torque correction value calculation unit 280 of the first embodiment includes a proportional coefficient multiplication unit 281, a subtraction unit 282, a torque adjustment coefficient value map unit 283, an absolute value calculation unit 284, including.
- the self-aligning torque T SAT is input to the absolute value calculation unit 284.
- the absolute value calculation unit 284 calculates the absolute value
- the proportional coefficient multiplying unit 281 outputs a value k(
- the value of the proportional coefficient k is set to such a value that the torque signal Tref_a0 and the output value k(
- the subtraction unit 282 outputs a value Tref_a0-k (
- the torque adjustment coefficient value map unit 283 holds a torque adjustment coefficient value map showing the relationship between the output value Tref_a0-k (
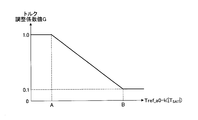
- FIG. 14 is a diagram illustrating a characteristic example of a torque adjustment coefficient value map held by the torque adjustment coefficient value map unit according to the first embodiment.
- the torque adjustment coefficient value G can take a positive value of 1 or less. As shown in FIG. 14, in the torque adjustment coefficient value map, the torque adjustment coefficient value G is subtracted by “1.0” in the region where the output value Tref_a0-k (
- the torque adjustment coefficient value map shows that the torque adjustment coefficient value G is from “1.0” to “0.1” in the region where the output value Tref_a0-k (
- ) of the subtraction unit 282 are set appropriately. Further, the value of the torque adjustment coefficient value G when the output value Tref_a0-k (
- the torque adjustment coefficient value map unit 283 derives and outputs a torque adjustment coefficient value G according to the output value Tref_a0-k (
- the torque adjustment coefficient value G may be calculated using a mathematical expression showing the relationship between the output value Tref_a0-k(
- the multiplying unit 211 outputs the sign of the steering angle ⁇ h output from the code extracting unit 213 and the low ⁇ road torque correction value calculating unit 280 to the torque signal Tref_a0 output from the basic map unit 210.
- the output torque adjustment coefficient value G is multiplied and output to the addition unit 261 as a torque signal Tref_a.
- the torque signal Tref_a corresponding to the positive or negative steering angle ⁇ h is obtained.
- FIG. 15 is a diagram showing an example of the operation based on the torque adjustment coefficient value output from the low ⁇ road torque correction value calculation unit.
- the example shown in FIG. 15 indicates that the vehicle is in a normal running state until time t, that is, the tire is gripped on the road surface, and that the grip force of the tire is gradually lost after time t. There is.
- twist angle control unit 300 (see FIG. 5) of the first embodiment will be described with reference to FIG. 16.
- FIG. 16 is a block diagram showing a configuration example of the twist angle control unit according to the first embodiment.
- the twist angle control unit 300 calculates a motor current command value Iref based on the target twist angle ⁇ ref, the twist angle ⁇ , the steering angle ⁇ h, and the motor angular velocity ⁇ m.
- the torsion angle control unit 300 includes a torsion angle feedback (FB) compensation unit 310, a speed control unit 330, a stabilization compensation unit 340, an output limiting unit 350, a steering angle disturbance compensation unit 360, a subtraction unit 361, an addition unit 363, and deceleration.
- FB torsion angle feedback
- the ratio section 370 is provided.
- the target twist angle ⁇ ref output from the conversion unit 500 is added and input to the subtraction unit 361.
- the twist angle ⁇ is subtracted and input to the subtraction unit 361.
- the steering angle ⁇ h is input to the steering angle disturbance compensation unit 360.
- the motor angular velocity ⁇ m is input to the stabilization compensator 340.
- the torsion angle FB compensation unit 310 multiplies the deviation ⁇ 0 between the target torsion angle ⁇ ref and the torsion angle ⁇ calculated by the subtraction unit 361 by a compensation value CFB (transfer function), and the torsion angle ⁇ ref follows the target torsion angle ⁇ ref. Then, the target column angular velocity ⁇ ref1 is output. The target column angular velocity ⁇ ref1 is added and output to the adder 363.
- the compensation value CFB may be a simple gain Kpp or a commonly used compensation value such as a PI control compensation value.
- the steering angle disturbance compensation unit 360 multiplies the steering angle ⁇ h by the compensation value Ch (transfer function) and outputs the target column angular velocity ⁇ ref2.
- the target column angular velocity ⁇ ref2 is added and output to the adder 363.
- the addition unit 363 adds the target column angular velocity ⁇ ref1 and the target column angular velocity ⁇ ref2, and outputs it as the target column angular velocity ⁇ ref to the velocity control unit 330.
- the basic purpose of the steering angle disturbance compensating unit 360 is to reduce the influence of the steering angle ⁇ h as this disturbance.
- the speed control unit 330 calculates the motor current command value Is such that the column angular speed ⁇ c follows the target column angular speed ⁇ ref by the IP control (proportional PI control).
- the column angular velocity ⁇ c may be a value obtained by multiplying the motor angular velocity ⁇ m by the reduction ratio 1/N of the reduction ratio unit 370 that is the reduction mechanism, as shown in FIG.
- the subtraction unit 333 calculates the difference ( ⁇ ref ⁇ c) between the target column angular velocity ⁇ ref and the column angular velocity ⁇ c.
- the integrating unit 331 integrates the difference ( ⁇ ref ⁇ c) between the target column angular velocity ⁇ ref and the column angular velocity ⁇ c, and adds the integration result to the subtracting unit 334.
- the twist angular velocity ⁇ t is also output to the proportional unit 332.
- the proportional unit 332 performs a proportional process with the gain Kvp on the column angular velocity ⁇ c, and subtracts and inputs the proportional process result to the subtractor 334.
- the subtraction result of the subtraction unit 334 is output as the motor current command value Is.
- the speed control unit 330 is not the IP control but the PI control, the P (proportional) control, the PID (proportional integral differential) control, the PI-D control (differential preceding PID control), the model matching control, the model reference.
- the motor current command value Is may be calculated by a generally used control method such as control.
- the output limiter 350 has preset upper and lower limits for the motor current command value Is. The upper and lower limits of the motor current command value Is are limited and the motor current command value Iref is output.
- the configuration of the twist angle control unit 300 in this embodiment is an example, and may have a mode different from the configuration shown in FIG.
- the twist angle control unit 300 may not include the steering angle disturbance compensating unit 360, the adding unit 363, and the reduction ratio unit 370.
- FIG. 17 is a block diagram illustrating a configuration example of the target steering torque generation unit according to the first modification of the first embodiment.
- FIG. 18 is a block diagram showing a configuration example of a low ⁇ road torque correction value calculation unit according to the first modification of the first embodiment.
- the same components as those in the first embodiment described above are designated by the same reference numerals, and duplicate description will be omitted.
- the target steering torque generation unit 200a includes a subtraction unit 212 instead of the multiplication unit 211. Further, the target steering torque generation unit 200a includes a multiplication unit 214.
- the low ⁇ road torque correction value calculation unit 280a includes a torque signal Tref_a0 output from the basic map unit 210 and a self-error output from the SAT estimation unit 343 (see FIG. 3).
- the vehicle speed Vs is input in addition to the lining torque T SAT .
- the low ⁇ road torque correction value calculation unit 280a includes a proportional coefficient multiplication unit 281a, a subtraction unit 282a, a torque adjustment subtraction value map unit 283a, and an absolute value calculation. And a portion 284a.
- the self-aligning torque T SAT is input to the absolute value calculation unit 284a.
- the absolute value calculation unit 284a calculates the absolute value
- the proportional coefficient multiplying unit 281a outputs a value k(
- the value of the proportional coefficient k is set to such a value that the torque signal Tref_a0 and the output value k(
- the subtraction unit 282a outputs a value Tref_a0-k (
- the torque adjustment subtraction value map unit 283a holds a torque adjustment subtraction value map showing the relationship between the output value Tref_a0-k (
- FIG. 19 is a diagram showing a characteristic example of the torque adjustment subtraction value map held by the torque adjustment subtraction value map unit of the first modification of the first embodiment.
- the torque adjustment subtraction value S is set to “0” in the region where the output value Tref_a0-k (
- the torque adjustment subtraction value map has a characteristic that the torque adjustment subtraction value S gradually increases from “0” in a region where the output value Tref_a0-k (
- ) of the subtraction unit 282a are set appropriately. Further, the value of the torque adjustment subtraction value S when the output value Tref_a0-k (
- the torque adjustment subtraction value map unit 283a derives and outputs the torque adjustment subtraction value S according to the output value Tref_a0-k (
- the torque adjustment subtraction value S may be calculated using a mathematical expression indicating the relationship between the output value Tref_a0-k (
- the subtraction unit 212 subtracts the torque adjustment subtraction value S output from the low ⁇ road torque correction value calculation unit 280a from the torque signal Tref_a0 output from the basic map unit 210.
- the multiplication unit 214 multiplies the output value of the subtraction unit 212 by the sign of the steering angle ⁇ h output from the code extraction unit 213, and outputs it as the torque signal Tref_a to the addition unit 261. As a result, the torque signal Tref_a corresponding to the positive or negative steering angle ⁇ h is obtained.
- the torque signal Tref_a is set to the normal running state. It can be made smaller than the (solid line in FIG. 15) (broken line in FIG. 15). As a result, the steering feel becomes lighter than in a normal traveling state, and the driver can recognize that the tire grip force has been lost and can perform an appropriate emergency avoidance operation.
- FIG. 20 is a diagram showing an example of an internal block configuration of a control unit according to the second modification of the first embodiment.
- FIG. 21 is a block diagram showing a configuration example of a target steering torque generation unit according to the second modification of the first embodiment.
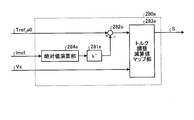
- FIG. 22 is a block diagram showing a configuration example of a low ⁇ road torque correction value calculation unit according to the second modification of the first embodiment.
- the same components as those in the first embodiment described above are designated by the same reference numerals, and duplicate description will be omitted.
- the actual yaw rate ⁇ detected by the yaw rate sensor 15 (see FIG. 1) is input to the target steering torque generation unit 200b.
- the actual yaw rate ⁇ is used as the physical quantity generated by the slip of the tire, thereby making it possible to feed back to the driver that the grip force of the tire has been lost.
- the low ⁇ road torque correction value calculation unit 280b includes the torque signal Tref_a0 output from the basic map unit 210 and the self-error output from the SAT estimation unit 343 (see FIG. 3).
- the actual yaw rate ⁇ is input instead of the lining torque T SAT .
- the low ⁇ road torque correction value calculation unit 280b includes a proportional coefficient multiplication unit 281b, a subtraction unit 282b, a torque adjustment coefficient value map unit 283b, and an absolute value calculation. And a portion 284b.
- the actual yaw rate ⁇ is input to the absolute value calculation unit 284b.
- the absolute value calculator 284b calculates the absolute value
- the proportional coefficient multiplying unit 281b outputs a value k'
- the value of the proportional coefficient k′ is set to a value such that the torque signal Tref_a0 and the output value k′
- the subtraction unit 282b outputs a value Tref_a0-k
- the torque adjustment coefficient value map unit 283b holds a torque adjustment coefficient value map showing the relationship between the output value Tref_a0-k′
- the characteristics of the torque adjustment coefficient value map according to the second modification of the first embodiment are similar to those of the torque adjustment coefficient value map held by the torque adjustment coefficient value map unit 283 of the first embodiment shown in FIG. This can be dealt with by replacing the output value Tref_a0-k (
- the torque adjustment coefficient value map unit 283b derives and outputs the torque adjustment coefficient value G according to the output value Tref_a0-k'
- the torque adjustment coefficient value G may be calculated using a mathematical expression indicating the relationship between the output value Tref_a0-k'
- the multiplication unit 211 outputs the sign of the steering angle ⁇ h output from the code extraction unit 213 and the low ⁇ road torque correction value calculation unit 280b to the torque signal Tref_a0 output from the basic map unit 210.
- the output torque adjustment coefficient value G is multiplied and output to the addition unit 261 as a torque signal Tref_a.
- the torque signal Tref_a corresponding to the positive or negative steering angle ⁇ h is obtained.
- the torque signal Tref_a is set to the normal running state in the state where the grip force of the tire is lost, similarly to the configuration according to the first embodiment described above. It can be made smaller than the (solid line in FIG. 15) (broken line in FIG. 15). As a result, the steering feel becomes lighter than in a normal traveling state, and the driver can recognize that the tire grip force has been lost and can perform an appropriate emergency avoidance operation.
- FIG. 23 is a block diagram illustrating a configuration example of the target steering torque generation unit according to the modified example 3 of the first embodiment.
- FIG. 24 is a block diagram showing a configuration example of a low ⁇ road torque correction value calculation unit according to Modification 3 of the first embodiment.
- the same components as those of the second modification of the first embodiment described above are designated by the same reference numerals, and overlapping description will be omitted.
- the target steering torque generation unit 200c includes a subtraction unit 212 instead of the multiplication unit 211.
- the low ⁇ road torque correction value calculation unit 280c includes the torque signal Tref_a0 output from the basic map unit 210 and the actual yaw rate ⁇ detected by the yaw rate sensor 15 (see FIG. 1). In addition, the vehicle speed Vs is input.
- the low ⁇ road torque correction value calculation unit 280c includes a proportional coefficient multiplication unit 281c, a subtraction unit 282c, a torque adjustment subtraction value map unit 283c, and an absolute value calculation. And a portion 284c.
- the actual yaw rate ⁇ is input to the absolute value calculation unit 284c.
- the absolute value calculator 284c calculates the absolute value
- the proportional coefficient multiplying unit 281c multiplies the input absolute value
- the value of the proportional coefficient k′ is set to such a value that the torque signal Tref_a0 and the output value k′
- the subtraction unit 282c outputs a value Tref_a0-k'
- the torque adjustment subtraction value map unit 283c holds a torque adjustment subtraction value map showing the relationship between the output value Tref_a0-k'
- the characteristics of the torque adjustment subtraction value map according to Modification 3 of Embodiment 1 are similar to the torque adjustment subtraction value map held by the torque adjustment subtraction value map unit 283a of Modification 1 of Embodiment 1 shown in FIG. This can be dealt with by replacing the output value Tref_a0-k (
- the torque adjustment subtraction value map unit 283c derives and outputs the torque adjustment subtraction value S according to the output value Tref_a0-k'
- the torque adjustment subtraction value S may be calculated using a mathematical expression showing the relationship between the output value Tref_a0-k'
- the subtraction unit 212 subtracts the torque adjustment subtraction value S output from the low ⁇ road torque correction value calculation unit 280c from the torque signal Tref_a0 output from the basic map unit 210.
- the multiplication unit 214 multiplies the output value of the subtraction unit 212 by the sign of the steering angle ⁇ h output from the code extraction unit 213, and outputs it as the torque signal Tref_a to the addition unit 261. As a result, the torque signal Tref_a corresponding to the positive or negative steering angle ⁇ h is obtained.
- the torque signal Tref_a is set to the normal running state. It can be made smaller than the (solid line in FIG. 15) (broken line in FIG. 15). As a result, the steering feel becomes lighter than in a normal traveling state, and the driver can recognize that the tire grip force has been lost and can perform an appropriate emergency avoidance operation.
- the self-aligning torque T SAT estimated by the SAT estimation unit 343 (see FIG. 3) and the yaw rate sensor 15 Although the configuration using the actual yaw rate ⁇ detected by (see FIG. 1) is illustrated, for example, as the configuration using the actual lateral acceleration detected by the lateral acceleration sensor 16 (see FIG. 1) as the physical quantity generated by the slip of the tire. Also, it is possible to obtain the same effects as those of the first embodiment and the modifications 1 to 3 thereof.
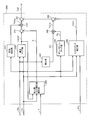
- FIG. 25 is a diagram showing an example of an internal block configuration of the control unit according to the second embodiment. It should be noted that the same components as those in the first embodiment described above are designated by the same reference numerals and redundant description will be omitted.
- the control unit (ECU) 30a according to the second embodiment differs from that of the first embodiment in the configurations of the target steering torque generation unit 201 and the twist angle control unit 300a.
- the steering torque Ts and the motor angle ⁇ m are input to the target steering torque generation unit 201.
- the twist angle control unit 300a calculates a motor current command value Imc such that the twist angle ⁇ becomes the target twist angle ⁇ ref.
- the motor 20 is driven by the motor current command value Imc.
- FIG. 26 is a block diagram showing a configuration example of the target steering torque generation unit of the second embodiment.
- the target steering torque generation unit 201 of the second embodiment includes a SAT information correction unit 250 and an addition unit 263 in addition to the configuration described in the first embodiment.
- the steering angle ⁇ h, the vehicle speed Vs, the steering torque Ts, the motor angle ⁇ m, and the motor current command value Imc are input to the SAT information correction unit 250.
- the SAT information correction unit 250 calculates a self-aligning torque (SAT) based on the steering torque Ts, the motor angle ⁇ m, and the motor current command value Imc, and further performs filter processing, gain multiplication, and restriction processing to obtain a torque signal ( The first torque signal Tref_d is calculated.
- SAT self-aligning torque
- FIG. 27 is a block diagram showing a configuration example of the SAT information correction unit.
- the SAT information correction unit 250 includes a SAT calculation unit 251, a filter unit 252, a steering torque sensitive gain unit 253, a vehicle speed sensitive gain unit 254, a steering angle sensitive gain unit 255, and a limiting unit 256.
- FIG. 28 is an image diagram showing a state of torque generated between the road surface and the steering wheel.
- a steering torque Ts is generated by the driver steering the steering wheel, and the motor 20 generates an assist torque (motor torque) Tm in accordance with the steering torque Ts.
- the wheels are steered and self-aligning torque T SAT is generated as a reaction force.
- a torque that acts as a resistance to the steering of the steering wheel is generated by the column shaft converted inertia (inertia acting on the column shaft by the motor 20 (the rotor thereof), the reduction mechanism, etc.) J and friction (static friction) Fr.
- a physical torque (viscous torque) expressed as a damper term (damper coefficient D M ) is generated depending on the rotation speed of the motor 20. From the balance of these forces, the equation of motion shown in the following equation (12) is obtained.
- ⁇ M is the column shaft-converted (converted into a value for the column shaft) motor angular velocity
- ⁇ M is the column-axis converted motor angular acceleration
- T SAT ⁇ Tm ⁇ Ts+J ⁇ M +Fr ⁇ sign( ⁇ M )+D M ⁇ M (13)
- the motor shaft angular velocity ⁇ M , the motor angular acceleration ⁇ M , the assist torque Tm, and the steering torque Ts are obtained by previously obtaining the column shaft converted inertia J, the static friction Fr, and the damper coefficient DM as constants. Therefore, the self-aligning torque T SAT can be calculated.
- the column shaft conversion inertia J may be a value converted to the column shaft simply by using a relational expression between the motor inertia and the reduction ratio.
- the steering torque Ts, the motor angle ⁇ m, and the motor current command value Imc are input to the SAT calculation unit 251.
- the SAT calculator 251 calculates the self-aligning torque T SAT using the above equation (13).
- the SAT calculation unit 251 includes a conversion unit 251A, an angular velocity calculation unit 251B, an angular acceleration calculation unit 251C, a block 251D, a block 251E, a block 251F, a block 251G, and adders 251H, 251I, and 251J.
- the motor current command value Imc is input to the conversion unit 251A.
- the conversion unit 251A calculates the column shaft converted assist torque Tm by multiplying a predetermined gear ratio and a torque constant.
- the motor angle ⁇ m is input to the angular velocity calculation unit 251B.
- the angular velocity calculation unit 251B calculates the column shaft-converted motor angular velocity ⁇ M by differentiating and multiplying the gear ratio.
- the motor angular velocity ⁇ M is input to the angular acceleration calculation unit 251C.
- the angular acceleration calculation unit 251C differentiates the motor angular velocity ⁇ M to calculate the column shaft-converted motor angular acceleration ⁇ M.
- the block 251D, the block 251E, the block 251F, the block 251G, and the adders 251H, 251I, 251J calculates the self-aligning torque T SAT with the configuration shown in FIG.
- the motor angular velocity ⁇ M output from the angular velocity calculation unit 251B is input to the block 251D.
- the block 251D functions as a sign function and outputs the sign of the input data.
- the motor angular velocity ⁇ M output from the angular velocity calculation unit 251B is input to the block 251E.
- the block 251E multiplies the input data by the damper coefficient D M and outputs the product.
- the block 251F multiplies the input data from the block 251D by the static friction Fr and outputs the product.
- the motor angular acceleration ⁇ M output from the angular acceleration calculation unit 251C is input to the block 251G.
- the block 251G multiplies the input data by the column axis conversion inertia J and outputs the product.
- the adder 251H adds the steering torque Ts and the assist torque Tm output from the conversion unit 251A.
- the adder 251I subtracts the output of the block 251G from the output of the adder 251H.
- the adder 251J adds the output of the block 251E and the output of the block 251F, and subtracts the output of the adder 251I.
- the above equation (13) can be realized. That is, the self-aligning torque T SAT is calculated by the configuration of the SAT calculating unit 251 shown in FIG.
- the column angle may be used as the angle information instead of the motor angle ⁇ m. In this case, column axis conversion is unnecessary. Further, instead of the motor angle ⁇ m, a signal obtained by converting the motor angular velocity ⁇ m from the EPS steering system/vehicle system 100 into a column axis may be input as the motor angular velocity ⁇ M , and the differentiation process for the motor angle ⁇ m may be omitted. Furthermore, the self-aligning torque T SAT may be calculated by a method other than the above, and a measured value may be used instead of the calculated value.
- the filter unit 252 extracts the information to be transmitted from the self-aligning torque T SAT , and steers the steering wheel.
- the amount transmitted by the torque sensitive gain unit 253, the vehicle speed sensitive gain unit 254, and the steering angle sensitive gain unit 255 is adjusted, and further, the upper and lower limit values are adjusted by the limiting unit 256.
- the self-aligning torque T SAT calculated by the SAT calculation unit 251 is also output to the target steering torque generation unit 201.
- the self-aligning torque T SAT is input from the SAT calculation unit 251 to the filter unit 252.
- the filter unit 252 filters the self-aligning torque T SAT with, for example, a bandpass filter, and outputs SAT information T ST 1.
- the SAT information T ST 1 and the steering torque Ts output from the filter unit 252 are input to the steering torque sensitive gain unit 253.
- the steering torque sensitive gain unit 253 sets the steering torque sensitive gain.
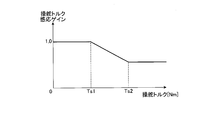
- FIG. 29 is a diagram showing a characteristic example of the steering torque sensitive gain.
- the steering torque sensitive gain unit 253 sets the steering torque sensitive gain so that the sensitivity is high near the on-center where the vehicle is traveling straight ahead.
- the steering torque sensitive gain unit 253 multiplies the SAT information T ST 1 by the steering torque sensitive gain set according to the steering torque Ts, and outputs the SAT information T ST 2.
- the steering torque sensitive gain is fixed at 1.0 when the steering torque Ts is Ts1 (for example, 2 Nm) or less, and is smaller than 1.0 when the steering torque Ts is Ts2 (>Ts1) (for example, 4 Nm) or more.
- Ts1 for example, 2 Nm
- Ts2 for example, 4 Nm
- An example in which the steering torque Ts is fixed and is set to decrease at a constant rate between Ts1 and Ts2 is shown.
- the SAT information T ST 2 and the vehicle speed Vs output from the steering torque sensitive gain unit 253 are input to the vehicle speed sensitive gain unit 254.
- the vehicle speed sensitive gain section 254 sets the vehicle speed sensitive gain.
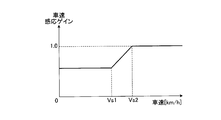
- FIG. 30 is a diagram showing a characteristic example of the vehicle speed response gain.
- the vehicle speed sensitive gain unit 254 sets the vehicle speed sensitive gain so that the sensitivity during high-speed traveling becomes high.
- the vehicle speed sensitive gain unit 254 multiplies the SAT information T ST 2 by the vehicle speed sensitive gain set according to the vehicle speed Vs, and outputs the SAT information T ST 3.
- the vehicle speed response gain is fixed at 1.0 when the vehicle speed Vs is Vs2 (for example, 70 km/h) or more, and is smaller than 1.0 when the vehicle speed Vs is Vs1 ( ⁇ Vs2) (for example, 50 km/h) or less. Is fixed and the vehicle speed Vs is set to increase at a constant rate between Vs1 and Vs2.
- the SAT information T ST 3 and the steering angle ⁇ h output from the vehicle speed sensitive gain unit 254 are input to the steering angle sensitive gain unit 255.
- the steering angle sensitive gain unit 255 sets the steering angle sensitive gain.
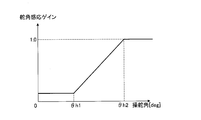
- FIG. 31 is a diagram showing a characteristic example of the steering angle response gain.
- the steering angle sensitive gain unit 255 sets the steering angle sensitive gain so that the steering angle sensitive gain unit 255 starts operating from a predetermined steering angle and the sensitivity becomes high when the steering angle is large.
- the steering angle sensitive gain unit 255 multiplies the SAT information T ST 3 by the steering angle sensitive gain set according to the steering angle ⁇ h, and outputs the torque signal Tref_d0.
- the steering angle response gain is fixed at a predetermined gain value G ⁇ when the steering angle ⁇ h is ⁇ h1 (for example, 10 deg) or less, and fixed at 1.0 when the steering angle ⁇ h is ⁇ h2 (for example, 30 deg) or more.
- G ⁇ may be set in the range of 0 ⁇ G ⁇ 1.
- the torque signal Tref_d0 output from the steering angle sensitive gain unit 255 is input to the limiting unit 256.
- the upper limit and the lower limit of the torque signal Tref_d0 are set in the limiter 256.
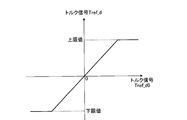
- FIG. 32 is a diagram showing an example of setting the upper limit value and the lower limit value of the torque signal in the limiting section.
- the limiting unit 256 sets the upper limit value and the lower limit value for the torque signal Tref_d0 in advance, and when the input torque signal Tref_d0 is equal to or higher than the upper limit value, the limiting unit 256 sets the upper limit value to the lower limit value. The lower limit value, otherwise the torque signal Tref_d0 is output as the torque signal Tref_d.
- the steering torque sensitive gain, the vehicle speed sensitive gain, and the steering angle sensitive gain may not be linear characteristics as shown in FIGS. 29, 30, and 31, but may be curved characteristics.
- the steering torque sensitive gain, the vehicle speed sensitive gain, and the steering angle sensitive gain may be appropriately adjusted according to the steering feeling.
- the limiting unit 256 may be deleted.
- the steering torque sensitive gain section 253, the vehicle speed sensitive gain section 254, and the steering angle sensitive gain section 255 can also be appropriately omitted.
- the installation positions of the steering torque sensitive gain, the vehicle speed sensitive gain, and the steering angle sensitive gain may be exchanged.
- the steering torque sensitive gain, the vehicle speed sensitive gain, and the steering angle sensitive gain may be obtained in parallel and multiplied by the SAT information T ST 1 in one component.
- the configuration of the SAT information correction unit 250 in the present embodiment is an example, and may have a mode different from the configuration shown in FIG.
- the same effect as that of the first embodiment can be obtained by providing the target steering torque generation unit 201 with the low ⁇ road torque correction value calculation unit 280 described in the first embodiment. it can.
- the self-aligning torque T SAT calculated by the SAT calculator 251 may be input to the low ⁇ road torque correction value calculator 280 shown in FIG. 11.
- twist angle control unit 300a of the second embodiment will be described with reference to FIG.
- FIG. 33 is a block diagram showing a configuration example of the twist angle control unit of the second embodiment.
- the twist angle control unit 300a calculates a motor current command value Imc based on the target twist angle ⁇ ref, the twist angle ⁇ , and the motor angular velocity ⁇ m.
- the torsion angle control unit 300 a includes a torsion angle feedback (FB) compensation unit 310, a torsion angular velocity calculation unit 320, a velocity control unit 330, a stabilization compensation unit 340, an output limiting unit 350, a subtraction unit 361, and an addition unit 362. .
- FB torsion angle feedback
- the target twist angle ⁇ ref output from the conversion unit 500 is added and input to the subtraction unit 361.
- the twist angle ⁇ is subtracted and input to the subtraction unit 361 and also input to the twist angular velocity calculation unit 320.
- the motor angular velocity ⁇ m is input to the stabilization compensator 340.
- the twist angle FB compensation unit 310 multiplies the deviation ⁇ 0 between the target twist angle ⁇ ref and the twist angle ⁇ calculated by the subtraction unit 361 by a compensation value CFB (transfer function), and the twist angle ⁇ follows the target twist angle ⁇ ref.
- the target torsional angular velocity ⁇ ref is output.
- the compensation value CFB may be a simple gain Kpp or a commonly used compensation value such as a PI control compensation value.
- the target torsional angular velocity ⁇ ref is input to the velocity control unit 330.
- the twist angle FB compensating unit 310 and the speed control unit 330 allow the target twist angle ⁇ ref to follow the twist angle ⁇ and realize a desired steering torque.
- the twist angular velocity calculation unit 320 performs a differential calculation process on the twist angle ⁇ to calculate the twist angular velocity ⁇ t.
- the twist angular velocity ⁇ t is output to the velocity control unit 330.
- the torsional angular velocity calculation unit 320 may perform a pseudo-differential with HPF and gain as the differential calculation. Further, the torsional angular velocity calculation unit 320 may calculate the torsional angular velocity ⁇ t from another means or other than the torsional angle ⁇ , and output it to the velocity control unit 330.
- the speed control unit 330 calculates the motor current command value Imca1 by the IP control (proportional PI control) so that the torsional angular velocity ⁇ t follows the target torsional angular velocity ⁇ ref.
- the subtraction unit 333 calculates a difference ( ⁇ ref ⁇ t) between the target twist angular velocity ⁇ ref and the twist angular velocity ⁇ t.
- the integrating unit 331 integrates the difference ( ⁇ ref ⁇ t) between the target torsional angular velocity ⁇ ref and the torsional angular velocity ⁇ t, and adds the integration result to the subtracting unit 334.
- the twist angular velocity ⁇ t is also output to the proportional unit 332.
- the proportional unit 332 performs a proportional process on the torsional angular velocity ⁇ t using the gain Kvp, and subtracts the proportional process result into the subtractor 334.
- the subtraction result of the subtraction unit 334 is output as the motor current command value Imca1.
- the speed control unit 330 is not the IP control but the PI control, the P (proportional) control, the PID (proportional integral derivative) control, the PI-D control (differential preceding PID control), the model matching control, the model reference.
- the motor current command value Imca1 may be calculated by a generally used control method such as control.
- the stabilization compensator 340 has a compensation value Cs (transfer function), and calculates the motor current command value Imca2 from the motor angular velocity ⁇ m. If the gains of the torsion angle FB compensating unit 310 and the speed control unit 330 are increased in order to improve the followability and the disturbance characteristic, a controllable oscillation phenomenon in a high range occurs. As a countermeasure against this, a transfer function (Cs) necessary for stabilizing the motor angular velocity ⁇ m is set in the stabilization compensating unit 340. As a result, stabilization of the entire EPS control system can be realized.
- Cs transfer function
- the adding unit 362 adds the motor current command value Imca1 from the speed control unit 330 and the motor current command value Imca2 from the stabilization compensating unit 340, and outputs it as the motor current command value Imcb.
- the output limiter 350 has preset upper and lower limits for the motor current command value Imcb.
- the output limiting unit 350 limits the upper and lower limit values of the motor current command value Imcb and outputs the motor current command value Imc.
- the configuration of the twist angle control unit 300a in the present embodiment is an example, and may have a mode different from the configuration shown in FIG.
- the twist angle control unit 300a may not have the stabilization compensator 340.
- FIG. 34 is a block diagram showing a configuration example of a target steering torque generation unit of a modified example of the second embodiment.
- the same components as those in the second embodiment described above are designated by the same reference numerals, and duplicate description will be omitted.
- the low- ⁇ road torque correction value calculation section 280a described in the first modified example of the first embodiment is provided in the target steering torque generation section 201a.
- the same effect as that of the first modification of the first embodiment can be obtained.
- the self-aligning torque T SAT calculated by the SAT calculating unit 251 may be input to the low ⁇ road torque correction value calculating unit 280a shown in FIG.
- the configuration in which the self-aligning torque T SAT calculated by the SAT calculation unit 251 (see FIG. 27) is used as the physical quantity generated by the slip of the tire has been exemplified.
- the actual yaw rate ⁇ detected by the yaw rate sensor 15 may be used as the physical quantity generated by the tire slip. It is possible. Also in the present embodiment, for example, the configuration in which the actual lateral acceleration detected by the lateral acceleration sensor 16 (see FIG. 1) is used as the physical quantity generated by the tire slip is the same as in the first and second embodiments described above. The effect of can be obtained.
- Embodiment 3 In Embodiments 1 and 2, the present disclosure is applied to a column type EPS as one of vehicle steering devices, but the present disclosure is not limited to an upstream type such as a column type and a downstream type such as a rack and pinion. It is also applicable to EPS. Further, performing the feedback control based on the target twist angle can be applied to a steer-by-wire (SBW) reaction force device including at least a torsion bar (arbitrary spring constant) and a sensor for detecting a twist angle.
- SBW steer-by-wire
- An embodiment (Embodiment 3) when the present disclosure is applied to an SBW reaction force device including a torsion bar will be described.
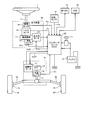
- FIG. 35 is a diagram showing a configuration example of the SBW system corresponding to the general configuration of the electric power steering device shown in FIG. 1.
- the same components as those described in the first and second embodiments will be designated by the same reference numerals and detailed description thereof will be omitted.
- the SBW system has no intermediate shaft mechanically connected to the column shaft 2 by the universal joint 4a in FIG. 1, and transmits the operation of the handle 1 to the steering mechanism including steering wheels 8L and 8R by an electric signal.
- the SBW system includes a reaction force device 60 and a drive device 70, and a control unit (ECU) 50 controls both devices.
- the reaction force device 60 detects the steering angle ⁇ h by the steering angle sensor 14, and at the same time transmits the motion state of the vehicle transmitted from the steered wheels 8L and 8R to the driver as reaction force torque.
- the reaction torque is generated by the reaction motor 61.
- the SBW system to which the present disclosure is applied is a type having a torsion bar
- the torque sensor 10 detects the steering torque Ts.
- the angle sensor 74 detects the motor angle ⁇ m of the reaction force motor 61.
- the drive device 70 drives the drive motor 71 in accordance with the steering of the steering wheel 1 by the driver, applies the drive force to the pinion rack mechanism 5 via the gear 72, and operates the tie rods 6 a and 6 b to operate the drive mechanism 71.
- Steering wheels 8L and 8R are steered.
- An angle sensor 73 is arranged near the pinion rack mechanism 5 and detects the steering angle ⁇ t of the steered wheels 8L, 8R.
- the ECU 50 In order to coordinately control the reaction force device 60 and the drive device 70, the ECU 50, based on the vehicle speed Vs and the like from the vehicle speed sensor 12 in addition to the information such as the steering angle ⁇ h and the steering angle ⁇ t output from both devices, A voltage control command value Vref1 for driving and controlling the reaction force motor 61 and a voltage control command value Vref2 for driving and controlling the drive motor 71 are generated.
- FIG. 36 is a block diagram showing the configuration of the third embodiment.
- control of the twist angle ⁇ hereinafter referred to as “twist angle control”
- control of the turning angle ⁇ t hereinafter referred to as “turning angle control”
- the drive device is controlled by the steering angle control.
- the drive device may be controlled by another control method.
- the twist angle ⁇ follows the target twist angle ⁇ ref calculated via the target steering torque generation unit 202 and the conversion unit 500 using the steering angle ⁇ h and the like by the configuration and operation similar to those of the second embodiment. Such control is performed.
- the motor angle ⁇ m is detected by the angle sensor 74, and the motor angular velocity ⁇ m is calculated by differentiating the motor angle ⁇ m by the angular velocity calculator 951.
- the turning angle ⁇ t is detected by the angle sensor 73.
- the processing in the EPS steering system/vehicle system 100 is not described in detail, but the current control unit 130 includes the subtraction unit 32B, the PI control unit 35, and the PWM control unit illustrated in FIG.
- the motor current command value Imc output from the torsion angle control section 300a and the current value Imr of the reaction force motor 61 detected by the motor current detector 140 are calculated based on the motor current command value Imc.
- the reaction force motor 61 is driven to control the current.
- the target turning angle generation unit 910 In the turning angle control, the target turning angle generation unit 910 generates a target turning angle ⁇ tref based on the steering angle ⁇ h, and the target turning angle ⁇ tref is input to the turning angle control unit 920 together with the turning angle ⁇ t.
- the steering angle control unit 920 calculates the motor current command value Imct so that the steering angle ⁇ t becomes the target steering angle ⁇ tref. Then, based on the motor current command value Imct and the current value Imd of the drive motor 71 detected by the motor current detector 940, the current control unit 930 has the same configuration and operation as the current control unit 130, and the drive motor. 71 is driven to control the current.
- the motor current command value Imct calculated by the turning angle control unit 920 is also output to the target steering torque generation unit 202.
- FIG. 37 is a diagram showing a configuration example of the target turning angle generation unit.
- the target turning angle generation unit 910 includes a limiting unit 931, a rate limiting unit 932, and a correcting unit 933.
- the limiting unit 931 limits the upper and lower limit values of the steering angle ⁇ h and outputs the steering angle ⁇ h1. Similar to the output limiting unit 350 in the twist angle control unit 300a shown in FIG. 33, the upper limit value and the lower limit value for the steering angle ⁇ h are set in advance and are limited.
- the rate limiting unit 932 sets a limit value and limits the amount of change in the steering angle ⁇ h1 in order to avoid a sudden change in the steering angle, and outputs the steering angle ⁇ h2. For example, when the difference from the steering angle ⁇ h1 one sample before is set as the change amount, and the absolute value of the change amount is larger than a predetermined value (limit value), the steering angle is adjusted so that the absolute value of the change amount becomes the limit value. ⁇ h1 is added/subtracted and output as the steering angle ⁇ h2. When the steering angle ⁇ h1 is less than the limit value, the steering angle ⁇ h1 is output as the steering angle ⁇ h2. Note that instead of setting a limit value for the absolute value of the amount of change, it is also possible to set an upper limit value and a lower limit value for the amount of change and apply a limit. The rate may be limited.
- the correction unit 933 corrects the steering angle ⁇ h2 and outputs the target turning angle ⁇ tref.
- the target turning angle ⁇ tref is obtained from the steering angle ⁇ h2 using a map defining the characteristics of the target turning angle ⁇ tref with respect to the magnitude
- the target turning angle ⁇ tref may be obtained by simply multiplying the steering angle ⁇ h2 by a predetermined gain.
- FIG. 38 is a diagram showing a configuration example of the turning angle control unit.
- the steered angle control unit 920 has the same configuration as the configuration example of the twist angle control unit 300a shown in FIG. 33 except for the stabilization compensation unit 340 and the addition unit 362, and the target twist angle ⁇ ref and the twist
- the target turning angle ⁇ tref and the turning angle ⁇ t are input instead of the angle ⁇ , and the turning angle feedback (FB) compensating unit 921, the turning angular velocity calculating unit 922, the speed control unit 923, the output limiting unit 926, and the subtracting unit 927.
- the torsion angle FB compensation unit 310, the torsion angular velocity calculation unit 320, the velocity control unit 330, the output limiting unit 350, and the subtraction unit 361 perform the same operation.
- FIG. 39 is a flowchart showing an operation example of the third embodiment.
- the angle sensor 73 detects the turning angle ⁇ t
- the angle sensor 74 detects the motor angle ⁇ m (step S110)
- the turning angle ⁇ t is sent to the turning angle control unit 920
- the motor angle ⁇ m is set to the angular velocity. It is input to each of the calculation units 951.
- the angular velocity calculation unit 951 differentiates the motor angle ⁇ m to calculate the motor angular velocity ⁇ m, and outputs it to the torsion angle control unit 300a (step S120).
- the target steering torque generation unit 202 executes the same operation as steps S10 to S40 shown in FIG. 7, drives the reaction force motor 61, and executes current control (steps S130 to S160).
- the target turning angle generating unit 910 inputs the steering angle ⁇ h, and the steering angle ⁇ h is input to the limiting unit 931.
- the limiting unit 931 limits the upper and lower limit values of the steering angle ⁇ h by the preset upper limit value and lower limit value (step S170), and outputs the steering angle ⁇ h1 to the rate limiting unit 932.
- the rate limiting unit 932 limits the amount of change in the steering angle ⁇ h1 by a preset limit value (step S180), and outputs the steering angle ⁇ h2 to the correction unit 933.
- the correction unit 933 corrects the steering angle ⁇ h2 to obtain the target turning angle ⁇ tref (step S190), and outputs it to the turning angle control unit 920.
- the turning angle control unit 920 which has input the turning angle ⁇ t and the target turning angle ⁇ tref, calculates the deviation ⁇ t0 by subtracting the turning angle ⁇ t from the target turning angle ⁇ tref in the subtracting unit 927 (step S200). ).
- the deviation ⁇ t0 is input to the steered angle FB compensator 921, and the steered angle FB compensator 921 compensates the deviation ⁇ t0 by multiplying the deviation ⁇ t0 by the compensation value (step S210), and the target steered angular velocity ⁇ tref is set to the speed. It is output to the control unit 923.
- the steered angular velocity calculation unit 922 inputs the steered angle ⁇ t, calculates the steered angular velocity ⁇ tt by a differential calculation with respect to the steered angle ⁇ t (step S220), and outputs it to the speed control unit 923.
- the speed control unit 923 calculates the motor current command value Imcta by the IP control similarly to the speed control unit 330 (step S230), and outputs it to the output limiting unit 926.
- the output limiting unit 926 limits the upper and lower limit values of the motor current command value Imcta by the preset upper limit value and lower limit value (step S240), and outputs the motor current command value Imct (step S250).
- the motor current command value Imct is input to the current control unit 930, and the current control unit 930 determines the drive motor based on the motor current command value Imct and the current value Imd of the drive motor 71 detected by the motor current detector 940. 71 is driven and a current control is implemented (step S260).
- the speed control unit 923 in the turning angle control unit 920 does not use the IP control, but the PI control, the P control, the PID control, the PI-D, like the speed control unit 330 in the torsion angle control unit 300a. Control, etc. are feasible, and any control of P, I, and D may be used, and the follow-up control by the steering angle control unit 920 and the twist angle control unit 300a is generally used. It may be performed with a control structure.
- the steered angle control unit 920 is used in a vehicle device as long as it has a control configuration in which the actual angle (here, the steered angle ⁇ t) follows the target angle (here, the target steered angle ⁇ tref).
- the control configuration is not limited, and for example, a control configuration used in an industrial positioning device, an industrial robot, or the like may be applied.
- one ECU 50 controls the reaction force device 60 and the drive device 70.
- an ECU for the reaction force device 60 and an ECU for the drive device 70 are provided respectively. May be.
- the ECUs exchange data with each other by communication.
- the SBW system shown in FIG. 35 does not have a mechanical connection between the reaction force device 60 and the drive device 70, but when an abnormality occurs in the system, the column shaft 2 and the steering mechanism are connected to a clutch or the like.
- the present disclosure is also applicable to an SBW system that includes a mechanical torque transmission mechanism that mechanically couples with each other. In such an SBW system, when the system is normal, the clutch is turned off to release the mechanical torque transmission, and when the system is abnormal, the clutch is turned on to enable the mechanical torque transmission.
- the torsion angle control units 300 and 300a in the above-described first to third embodiments directly calculate the motor current command value Imc and the assist current command value Iac, but before calculating them, the motor to be output first
- the motor current command value and the assist current command value may be calculated after calculating the torque (target torque).
- target torque the torque
- the generally used relationship between the motor current and the motor torque is used.
- FIG. 40 is a block diagram showing a configuration example of a low ⁇ road torque correction value calculation unit according to the third embodiment.
- the physical quantity generated by the tire slip is detected by the self-aligning torque T SAT estimated by the SAT estimation unit 343 (see FIG. 3) and the yaw rate sensor 15 (see FIG. 1).
- T SAT self-aligning torque
- the yaw rate sensor 15 see FIG. 1
- FIG. 40 A configuration using the motor current command value Imct calculated by the turning angle control unit 920 (see FIG. 36) will be described.
- the low ⁇ road torque correction value calculation unit 280d of the third embodiment includes a proportional coefficient multiplication unit 281d, a subtraction unit 282d, a torque adjustment coefficient value map unit 283d, and an absolute value calculation unit 284d. including.
- the motor current command value Imct is input to the absolute value calculation unit 284d.
- the absolute value calculator 284d calculates the absolute value
- the proportional coefficient multiplying unit 281d outputs a value k′′(
- the value of the proportional coefficient k′′ is set to such a value that the torque signal Tref_a0 and the output value k′′(
- the subtraction unit 282d outputs a value Tref_a0-k” (
- the torque adjustment coefficient value map unit 283d holds a torque adjustment coefficient value map showing the relationship between the output value Tref_a0-k′′(
- the characteristic of the torque adjustment coefficient value map is similar to the torque adjustment coefficient value map held by the torque adjustment coefficient value map unit 283 of the first embodiment shown in FIG. 14, and the output value Tref_a0-k(
- the torque adjustment coefficient value map unit 283d derives and outputs the torque adjustment coefficient value G according to the output value Tref_a0-k′′(
- the torque adjustment coefficient value G may be calculated using a mathematical expression indicating the relationship between the output value Tref_a0-k′′(
- FIG. 41 is a block diagram showing a configuration example of a low ⁇ road torque correction value calculation unit according to a modification of the third embodiment.
- the same components as those in the third embodiment described above are designated by the same reference numerals, and duplicate description will be omitted.
- the low ⁇ road torque correction value calculation unit 280e includes a torque signal Tref_a0 output from the basic map unit 210 and a motor current calculated by the turning angle control unit 920 (see FIG. 39).
- the vehicle speed Vs is input in addition to the command value Imct.
- the low ⁇ road torque correction value calculation unit 280e of the modification of the third embodiment includes a proportional coefficient multiplication unit 281e, a subtraction unit 282e, a torque adjustment subtraction value map unit 283e, and an absolute value calculation unit. And 284e.
- the motor current command value Imct is input to the absolute value calculation unit 284e.
- the absolute value calculator 284e calculates the absolute value
- the proportional coefficient multiplying unit 281e outputs a value k′′(
- the value of the proportional coefficient k′′ is set to such a value that the torque signal Tref_a0 and the output value k′′(
- the subtraction unit 282e subtracts the output value k′′(
- the torque adjustment subtraction value map unit 283e holds a torque adjustment subtraction value map showing the relationship between the output value Tref_a0-k′′(
- the characteristics of the torque adjustment subtraction value map according to the modification of the form 3 are similar to those of the torque adjustment subtraction value map held by the torque adjustment subtraction value map unit 283a of the modification 1 of the embodiment 1 shown in FIG. This can be handled by replacing the output value Tref_a0-k (
- the torque adjustment subtraction value map unit 283e derives and outputs the torque adjustment subtraction value S according to the output value Tref_a0-k′′(
- the torque adjustment subtraction value S may be calculated using a mathematical expression indicating the relationship between the output value Tref_a0-k′′(
- the configuration in which the motor current command value Imct calculated by the turning angle control unit 920 (see FIG. 39) is used as the physical quantity generated by the slip of the tire has been illustrated.
- the actual yaw rate ⁇ detected by the yaw rate sensor 15 (see FIG. 1) is used as the physical quantity generated by the tire slip.
- the configuration in which the actual lateral acceleration detected by the lateral acceleration sensor 16 (see FIG. 1) is used as the physical quantity generated by the tire slip is the same as in the first and second embodiments described above. The effect of can be obtained.
- the motor current command value Iref generated by the torsion angle control unit 300 may be used as the physical quantity generated by the tire slip, or the above-described embodiment may be used.
- the motor current command value Imc calculated by the torsion angle control unit 300a may be used as the physical quantity generated by the tire slip.
- the diagrams used above are conceptual diagrams for qualitatively explaining the present disclosure, and are not limited to these. Further, the above-described embodiment is an example of a preferred embodiment of the present disclosure, but the present invention is not limited to this, and various modifications can be made without departing from the gist of the present disclosure. Further, the mechanism is not limited to the torsion bar as long as the mechanism has an arbitrary spring constant between the handle and the motor or the reaction force motor.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Abstract
操舵力を補助するモータを駆動制御することにより、車両の操舵系をアシスト制御する車両用操向装置。モータの目標操舵トルクTrefを生成する目標操舵トルク生成部200を備える。目標操舵トルク生成部200は、操舵角及び車速に応じたトルク信号Tref_a0と、タイヤのスリップによって発生する物理量に所定の比例係数を乗じた値との差分値に応じた目標操舵トルクTrefを生成する。
Description
本発明は、車両用操向装置に関する。
車両用操向装置の1つである電動パワーステアリング装置(EPS)は、車両の操舵系にモータの回転力でアシスト力(操舵補助力)を付与するものである。EPSは、インバータから供給される電力で制御されるモータの駆動力を、減速機構を含む伝達機構により、ステアリングシャフト又はラック軸にアシスト力として付与する。
例えば、低μ路を走行する際のオーバーステアやアンダーステアを回避して車両の安定性を高める車両用操舵装置が開示されている(例えば、特許文献1)。
例えばアイスバーンや水溜りにおけるハイドロプレーニング現象等によって路面の摩擦抵抗が著しく減少すると、タイヤがスリップしてタイヤの実セルフアライニングトルクが減少する。一方、目標操舵トルクを生成する際、路面の状態に影響を受けないように、目標操舵トルクに実操舵トルクを追従させる制御を行う構成では、目標操舵トルクとタイヤの実セルフアライニングトルクとが乖離し、タイヤのグリップ力が失われていることに運転者が気付くのが遅れ、緊急回避操作が遅れる可能性がある。
本発明は、上記の課題に鑑みてなされたものであって、タイヤのグリップ力が失われたことを運転者にフィードバックすることができる車両用操向装置を提供すること、を目的としている。
上記の目的を達成するため、本発明の一態様に係る車両用操向装置は、操舵力を補助するモータを駆動制御することにより、車両の操舵系をアシスト制御する車両用操向装置であって、前記モータの目標操舵トルクを生成する目標操舵トルク生成部を備え、前記目標操舵トルク生成部は、操舵角及び車速に応じたトルク信号と、タイヤのスリップによって発生する物理量に所定の比例係数を乗じた値との差分値に応じた目標操舵トルクを生成する。
上記構成によれば、タイヤのスリップによって生じる車両の挙動の変化に応じた操舵トルクが与えられる。これにより、タイヤのグリップ力が失われたことを運転者が把握することができる。
車両用操向装置の望ましい態様として、前記目標操舵トルク生成部は、前記差分値に応じたトルク調整係数値を前記トルク信号に乗じて、前記目標操舵トルクを生成することが好ましい。
これにより、少ない演算量でタイヤのグリップ力が失われたことを運転者にフィードバックすることができる。
車両用操向装置の望ましい態様として、前記目標操舵トルク生成部は、前記差分値が大きいほど、前記トルク調整係数値を小さくすることが好ましい。
これにより、操舵角及び車速に応じたトルク信号と車両の挙動との乖離が大きいほど、トルク信号の補正量を大きくすることができる。
車両用操向装置の望ましい態様として、前記トルク調整係数値は1以下の正の値であることが好ましい。
これにより、目標操舵トルクを適切に設定することができる。
車両用操向装置の望ましい態様として、前記目標操舵トルク生成部は、前記差分値に応じたトルク調整減算値を前記トルク信号から減じて、前記目標操舵トルクを生成することが好ましい。
これにより、少ない演算量でタイヤのグリップ力が失われたことを運転者にフィードバックすることができる。
車両用操向装置の望ましい態様として、前記目標操舵トルク生成部は、前記差分値が大きいほど、前記トルク調整減算値を大きくすることが好ましい。
これにより、操舵角及び車速に応じたトルク信号と車両の挙動との乖離が大きいほど、トルク信号の補正量を大きくすることができる。
車両用操向装置の望ましい態様として、前記トルク調整減算値は前記トルク信号よりも小さいことが好ましい。
これにより、目標操舵トルクを適切に設定することができる。
車両用操向装置の望ましい態様として、前記物理量はセルフアライニングトルクであることが好ましい。
これにより、タイヤのスリップによって発生する物理量として、セルフアライニングトルクをパラメータとした制御を行うことができる。
車両用操向装置の望ましい態様として、前記物理量はヨーレートであることが好ましい。
これにより、タイヤのスリップによって発生する物理量として、ヨーレートをパラメータとした制御を行うことができる。
車両用操向装置の望ましい態様として、前記物理量は前記モータの電流指令値であることが好ましい。
これにより、タイヤのスリップによって発生する物理量として、モータの電流指令値をパラメータとした制御を行うことができる。
本発明によれば、タイヤのグリップ力が失われたことを運転者にフィードバックすることができる車両用操向装置を提供することができる。
以下、発明を実施するための形態(以下、実施形態という)につき図面を参照しつつ詳細に説明する。なお、下記の実施形態により本発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が容易に想定できるもの、実質的に同一のもの、いわゆる均等の範囲のものが含まれる。さらに、下記実施形態で開示した構成要素は適宜組み合わせることが可能である。
(実施形態1)
図1は、電動パワーステアリング装置の一般的な構成を示した図である。車両用操向装置の1つである電動パワーステアリング装置(EPS)は、操舵者から与えられる力が伝達する順に、ハンドル1のコラム軸(ステアリングシャフト、ハンドル軸)2、減速機構3、ユニバーサルジョイント4a,4b、ピニオンラック機構5、タイロッド6a,6bを経て、更にハブユニット7a,7bを介して操向車輪8L,8Rに連結されている。また、トーションバーを有するコラム軸2には、ハンドル1の操舵トルクTsを検出するトルクセンサ10及び操舵角θhを検出する舵角センサ14が設けられており、ハンドル1の操舵力を補助するモータ20が減速機構3を介してコラム軸2に連結されている。電動パワーステアリング装置を制御するコントロールユニット(ECU)30には、バッテリ13から電力が供給されると共に、イグニションキー11を経てイグニションキー信号が入力される。コントロールユニット30は、トルクセンサ10で検出された操舵トルクTsと車速センサ12で検出された車速Vsとに基づいてアシスト(操舵補助)指令の電流指令値の演算を行い、電流指令値に補償等を施した電圧制御指令値Vrefによって、モータ20に供給する電流を制御する。
図1は、電動パワーステアリング装置の一般的な構成を示した図である。車両用操向装置の1つである電動パワーステアリング装置(EPS)は、操舵者から与えられる力が伝達する順に、ハンドル1のコラム軸(ステアリングシャフト、ハンドル軸)2、減速機構3、ユニバーサルジョイント4a,4b、ピニオンラック機構5、タイロッド6a,6bを経て、更にハブユニット7a,7bを介して操向車輪8L,8Rに連結されている。また、トーションバーを有するコラム軸2には、ハンドル1の操舵トルクTsを検出するトルクセンサ10及び操舵角θhを検出する舵角センサ14が設けられており、ハンドル1の操舵力を補助するモータ20が減速機構3を介してコラム軸2に連結されている。電動パワーステアリング装置を制御するコントロールユニット(ECU)30には、バッテリ13から電力が供給されると共に、イグニションキー11を経てイグニションキー信号が入力される。コントロールユニット30は、トルクセンサ10で検出された操舵トルクTsと車速センサ12で検出された車速Vsとに基づいてアシスト(操舵補助)指令の電流指令値の演算を行い、電流指令値に補償等を施した電圧制御指令値Vrefによって、モータ20に供給する電流を制御する。
コントロールユニット30には、車両の各種情報を授受するCAN(Controller Area Network)40等の車載ネットワークが接続されている。また、コントロールユニット30には、CAN40以外の通信、アナログ/ディジタル信号、電波等を授受する非CAN41も接続可能である。
コントロールユニット30は、主としてCPU(MCU、MPU等も含む)で構成される。図2は、電動パワーステアリング装置を制御するコントロールユニットのハードウェア構成を示す模式図である。
コントロールユニット30を構成する制御用コンピュータ1100は、CPU(Central Processing Unit)1001、ROM(Read Only Memory)1002、RAM(Random Access Memory)1003、EEPROM(Electrically Erasable Programmable ROM)1004、インターフェース(I/F)1005、A/D(Analog/Digital)変換器1006、PWM(Pulse Width Modulation)コントローラ1007等を備え、これらがバスに接続されている。
CPU1001は、電動パワーステアリング装置の制御用コンピュータプログラム(以下、制御プログラムという)を実行して、電動パワーステアリング装置を制御する処理装置である。
ROM1002は、電動パワーステアリング装置を制御するための制御プログラムを格納する。また、RAM1003は、制御プログラムを動作させるためのワークメモリとして使用される。EEPROM1004には、制御プログラムが入出力する制御データ等が格納されている。制御データは、コントロールユニット30に電源が投入された後にRAM1003に展開された制御用コンピュータプログラム上で使用され、所定のタイミングでEEPROM1004に上書きされる。
ROM1002、RAM1003、及びEEPROM1004等は情報を格納する記憶装置であって、CPU1001が直接アクセスできる記憶装置(一次記憶装置)である。
A/D変換器1006は、操舵トルクTs、モータ20の電流検出値Im、及び操舵角θhの信号等を入力し、ディジタル信号に変換する。
インターフェース1005は、CAN40に接続されている。インターフェース1005は、車速センサ12からの車速Vの信号(車速パルス)を受け付けるためのものである。
PWMコントローラ1007は、モータ20に対する電流指令値に基づいてUVW各相のPWM制御信号を出力する。
図3は、電動パワーステアリング装置におけるコントロールユニットの内部ブロック構成の一例を示す図である。操舵トルクTs及び車速Vsは、電流指令値演算部31に入力される。電流指令値演算部31は、操舵トルクTs及び車速Vsに基づき、予め記憶しているルックアップテーブル(アシストマップ等)を参照し、モータ20に供給する電流の制御目標値である電流指令値Iref1を演算する。
補償信号生成部34は、補償信号CMを生成する。補償信号生成部34は、収れん性推定部341、慣性推定部342、セルフアライニングトルク(SAT:Self Aligning Torque)推定部343を備える。収れん性推定部341は、モータ20の角速度に基づいて車両のヨーレートを推定し、ハンドル1が振れ回る動作を制動することで、車両のヨーの収れん性を改善する補償値を推定する。慣性推定部342は、モータ20の角加速度に基づいて、モータ20の慣性力を推定し、応答性を高めるためにモータ20の慣性力を補償する補償値を推定する。SAT推定部343は、操舵トルクTs、アシストトルク、モータ20の角速度及び角加速度に基づいてセルフアライニングトルクTSATを推定し、そのセルフアライニングトルクを反力としてアシストトルクを補償する補償値を推定する。補償信号生成部34は、収れん性推定部341、慣性推定部342、SAT推定部343に加え、他の補償値を推定する推定部を備えてもよい。補償信号CMは、加算部344において慣性推定部342の補償値と、SAT推定部343の補償値とが加算され、この加算値と収れん性推定部341の補償値とが加算部345において加算された加算値である。なお、本開示において、SAT推定部343によって推定されるセルフアライニングトルクTSATは、後述する目標操舵トルク生成部200にも出力される。
加算部32Aにおいて、補償信号生成部34からの補償信号CMが電流指令値Iref1に加算されており、補償信号CMの加算によって、電流指令値Iref1に操舵システム系の特性補償がされ、収れん性や慣性特性等を改善するようになっている。そして、電流指令値Iref1は加算部32Aを経て、特性補償された電流指令値Iref2となり、電流指令値Iref2が電流制限部33に入力されている。電流制限部33において、電流指令値Iref2の最大電流が制限され、電流指令値Irefmが生成される。電流指令値Irefmが減算部32Bに入力され、モータ20側からフィードバックされている電流検出値Imとの偏差I(Irefm-Im)が減算部32Bで演算される。偏差Iが操舵動作の特性改善のためのPI制御部35に入力される。そうすると、PI制御部35で特性改善された電圧制御指令値VrefがPWM制御部36に入力され、さらにモータ駆動部としてのインバータ回路37を介してモータ20がPWM駆動される。モータ20の電流検出値Imは、電流検出器38で検出され、減算部32Bにフィードバックされる。また、インバータ回路37は、駆動素子として電界効果トランジスタ(Field Effect Transistor:(以下、FETという。))が用いられ、FETのブリッジ回路で構成されている。
従来の電動パワーステアリング装置でのアシスト制御では、運転者の手入力にて加えられた操舵トルクをトーションバーの捩れトルクとしてトルクセンサで検出し、主にそのトルクに応じたアシスト電流としてモータ電流を制御している。しかしながら、この方法で制御を行なう場合、路面の状態(例えば傾斜)の違いにより、操舵角によって異なる操舵トルクとなってしまうことがある。モータ出力特性の経年使用によるバラツキによっても、操舵トルクに影響を与えることがある。
図4は、舵角センサの設置例を示す構造図である。
コラム軸2には、トーションバー2Aが備えられている。操向車輪8L,8Rには、路面反力Rr及び路面情報(路面の摩擦抵抗μ)が作用する。トーションバー2Aを挟み、コラム軸2のハンドル側には、上側角度センサが設けられている。トーションバー2Aを挟み、コラム軸2の操向車輪側には、下側角度センサが設けられている。上側角度センサは、ハンドル角θ1を検出し、下側角度センサは、コラム角θ2を検出する。操舵角θhは、コラム軸2の上部に設けられた舵角センサで検出される。トーションバーの捩れ角Δθは、ハンドル角θ1及びコラム角θ2の偏差から、下記(1)式で表される。また、トーションバートルクTtは、(1)式で表されるトーションバーの捩れ角Δθ用いて、下記(2)式で表される。なお、Ktは、トーションバー2Aのバネ定数である。
Δθ=θ2-θ1・・・(1)
Tt=-Kt×Δθ・・・(2)
トーションバートルクTtは、トルクセンサを用いて検出することも可能である。本実施形態では、トーションバートルクTtを操舵トルクTsとしても扱うこととする。
図5は、実施形態1に係るコントロールユニットの内部ブロック構成の一例を示す図である。
コントロールユニット30は、内部ブロック構成として、目標操舵トルク生成部200、捩れ角制御部300、操舵方向判定部400、及び変換部500を備えている。
本実施形態において、運転者のハンドル操舵は、EPS操舵系/車両系100のモータ20でアシスト制御される。EPS操舵系/車両系100は、モータ20の他に、角度センサ、角速度演算部等を含む。
目標操舵トルク生成部200は、本開示において車両の操舵系をアシスト制御する際の操舵トルクの目標値である目標操舵トルクTrefを生成する。変換部500は、目標操舵トルクTrefを目標捩れ角Δθrefに変換する。捩れ角制御部300は、モータ20に供給する電流の制御目標値であるモータ電流指令値Irefを生成する。
捩れ角制御部300は、捩れ角Δθが目標捩れ角Δθrefとなるようなモータ電流指令値Irefを演算する。モータ20は、モータ電流指令値Irefにより駆動される。
操舵方向判定部400は、EPS操舵系/車両系100から出力されるモータ角速度ωmに基づき、操舵方向が右切りか左切りかを判定し、判定結果を操舵状態信号STsとして出力する。図6は、操舵方向の説明図である。
操舵方向が右切りか左切りかを示す操舵状態は、例えば図6に示すような操舵角θh及びモータ角速度ωmの関係で求めることができる。すなわち、モータ角速度ωmが正の値の場合は「右切り」と判定し、負の値の場合は「左切り」と判定する。なお、モータ角速度ωmの代わりに、操舵角θh、ハンドル角θ1又はコラム角θ2に対して速度演算を行って算出される角速度を用いても良い。
変換部500は、上記(2)式の関係を用いて、目標操舵トルク生成部200で生成された目標操舵トルクTrefを目標捩れ角Δθrefに変換する。
次に、実施形態1のコントロールユニットにおける基本的な動作例について説明する。図7は、実施形態1に係るコントロールユニットの動作例を示すフローチャートである。
操舵方向判定部400は、EPS操舵系/車両系100から出力されるモータ角速度ωmの符号に基づき、操舵方向が右切りか左切りかを判定し、判定結果を操舵状態信号STsとして、目標操舵トルク生成部200に出力する(ステップS10)。
目標操舵トルク生成部200は、車速Vs、車速判定信号Vfail、操舵状態信号STs、操舵角θh、及び実ヨーレートγreに基づき、目標操舵トルクTrefを生成する(ステップS20)。
変換部500は、目標操舵トルク生成部200で生成された目標操舵トルクTrefを目標捩れ角Δθrefに変換する(ステップS20)。目標捩れ角Δθrefは、捩れ角制御部300に出力される。
捩れ角制御部300は、目標捩れ角Δθref、操舵角θh、捩れ角Δθ、及びモータ角速度ωmに基づき、モータ電流指令値Irefを演算する(ステップS30)。
そして、捩れ角制御部300から出力されたモータ電流指令値Irefに基づいて電流制御が実施され、モータ20が駆動される(ステップS40)。
図8は、実施形態1の目標操舵トルク生成部の一構成例を示すブロック図である。図8に示すように、目標操舵トルク生成部200は、基本マップ部210、乗算部211、符号抽出部213、微分部220、ダンパゲインマップ部230、ヒステリシス補正部240、SAT情報補正部250、乗算部260、加算部261,262,263、及び低μ路トルク補正値演算部280を備える。図9は、基本マップ部が保持する基本マップの特性例を示す図である。図10は、ダンパゲインマップ部が保持するダンパゲインマップの特性例を示す図である。
基本マップ部210には、操舵角θh及び車速Vsが入力される。基本マップ部210は、図9に示す基本マップを用いて、車速Vsをパラメータとするトルク信号Tref_a0を出力する。すなわち、基本マップ部210は、車速Vsに応じたトルク信号Tref_a0を出力する。
図9に示すように、トルク信号Tref_a0は、操舵角θhの大きさ(絶対値)|θh|の増加に伴い増加する特性を有する。また、トルク信号Tref_aは、車速Vsの増加に伴い増加する特性を有する。なお、図9では操舵角θhの大きさ|θh|に応じたマップを構成しているが、正負の操舵角θhに応じたマップを構成しても良い。この場合、トルク信号Tref_a0の値は、正負の値を取り得る。このため、トルク信号Tref_a0に対する補正値を演算する低μ路トルク補正値演算部の構成についても適宜変更する必要がある。以下の説明では、図9に示す操舵角θhの大きさ|θh|に応じた正の値であるトルク信号Tref_a0を出力する態様について説明する。
符号抽出部213は、操舵角θhの符号を抽出する。具体的には、例えば、操舵角θhの値を、操舵角θhの絶対値で除算する。これにより、符号抽出部213は、操舵角θhの符号が「+」の場合には「1」を出力し、操舵角θhの符号が「-」の場合には「-1」を出力する。
微分部220には、操舵角θhが入力される。微分部220は、操舵角θhを微分して、角速度情報である舵角速度ωhを算出する。微分部220は、算出した舵角速度ωhを乗算部260に出力する。
ダンパゲインマップ部230には、車速Vsが入力される。ダンパゲインマップ部230は、図10に示す車速感応型のダンパゲインマップを用いて、車速Vsに応じたダンパゲインDGを出力する。
図10に示すように、ダンパゲインDGは、車速Vsが高くなるに従い徐々に大きくなる特性を有する。ダンパゲインDGは、操舵角θhに応じて可変する態様としても良い。
乗算部260は、微分部220から出力される舵角速度ωhに対して、ダンパゲインマップ部230から出力されるダンパゲインDGを乗算し、トルク信号Tref_bとして加算部262に出力する。
操舵方向判定部400は、例えば図6に示すような判定を行う。ヒステリシス補正部240には、操舵角θh、車速Vs、及び、図6に示す判定結果である操舵状態信号STsが入力される。ヒステリシス補正部240は、操舵角θh及び操舵状態信号STsに基づき、下記(3)式及び(4)式を用いてトルク信号Tref_cを演算する。なお、下記(3)式及び(4)式において、xは操舵角θh、yR=Tref_c及びyL=Tref_cはトルク信号Tref_cとする。また、係数aは1よりも大きい値であり、係数cは0よりも大きい値である。係数Ahysは、ヒステリシス特性の出力幅を示し、係数cは、ヒステリシス特性の丸みを表す係数である。
yR=Ahys{1-a-c(x-b)}・・・(3)
yL=-Ahys{1-ac(x-b’)}・・・(4)
右切り操舵の際には、上記(3)式を用いて、トルク信号Tref_c(yR)を算出する。左切り操舵の際には、上記(4)式を用いて、トルク信号Tref_c(yL)を算出する。なお、右切り操舵から左切り操舵へ切り替える際、又は、左切り操舵から右切り操舵へ切り替える際には、操舵角θh及びトルク信号Tref_cの前回値であるの最終座標(x1,y1)の値に基づき、操舵切り替え後の上記(3)式及び(4)式に対し、下記(5)式又は(6)式に示す係数b又はb’を代入する。これにより、操舵切り替え前後の連続性が保たれる。
b=x1+(1/c)loga{1-(y1/Ahys)}・・・(5)
b’=x1-(1/c)loga{1-(y1/Ahys)}・・・(6)
上記(5)式及び(6)式は、上記(3)式及び(4)式において、xにx1を代入し、yR及びyLにy1を代入することにより導出することができる。
係数aとして、例えば、ネイピア数eを用いた場合、上記(3)式、(4)式、(5)式、(6)式は、それぞれ下記(7)式、(8)式、(9)式、(10)式で表せる。
yR=Ahys[1-exp{-c(x-b)}]・・・(7)
yL=-Ahys[{1-exp{c(x-b’)}]・・・(8)
b=x1+(1/c)loge{1-(y1/Ahys)}・・・(9)
b’=x1-(1/c)loge{1-(y1/Ahys)}・・・(10)
図11は、ヒステリシス補正部の特性例を示す図である。図11に示す例では、上記(9)式及び(10)式において、Ahys=1[Nm]、c=0.3と設定し、0[deg]から開始し、+50[deg]、-50[deg]の操舵をした場合の、ヒステリシス補正されたトルク信号Tref_cの特性例を示している。図11に示すように、ヒステリシス補正部240から出力されるトルク信号Tref_cは、0の原点→L1(細線)→L2(破線)→L3(太線)のようなヒステリシス特性を有している。
なお、ヒステリシス特性の出力幅を表す係数であるAhys及び丸みを表す係数であるcを、車速Vs及び操舵角θhの一方又は双方に応じて可変としても良い。
また、舵角速度ωhは、操舵角θhに対する微分演算により求めているが、高域のノイズの影響を低減するために適度にローパスフィルタ(LPF)処理を実施している。また、ハイパスフィルタ(HPF)とゲインにより、微分演算とLPFの処理を実施しても良い。更に、舵角速度ωhは、操舵角θhではなく、上側角度センサが検出するハンドル角θ1又は下側角度センサが検出するコラム角θ2に対して微分演算とLPFの処理を行って算出しても良い。舵角速度ωhの代わりにモータ角速度ωmを角速度情報として使用しても良く、この場合、微分部220は不要となる。
図12は、実施形態1の低μ路トルク補正値演算部の一構成例を示すブロック図である。
図12に示すように、低μ路トルク補正値演算部280には、基本マップ部210(図8参照)から出力されるトルク信号Tref_a0、及びSAT推定部343(図3参照)から出力されるセルフアライニングトルクTSATが入力される。
図13は、低μ路における実セルフアライニングトルクの変化を示す図である。
タイヤの実セルフアライニングトルク(SAT値とも称する)は、操舵角θhの大きさ(絶対値)|θh|の上昇に応じて上昇する。このSAT値は、通常の走行状態において、基本マップ部210から出力されるトルク信号Tref_a0に略比例する。以下、トルク信号Tref_a0に対するSAT値の比例係数を「k」とする。また、本開示において、「通常の走行状態」とは、タイヤが路面にグリップした状態を示す。
一方、図13に示すように、SAT値は、例えばアイスバーンや水溜りにおけるハイドロプレーニング現象等によって路面の摩擦抵抗が著しく減少すると、タイヤがスリップしてSAT値が減少する。図13に示す例では、路面の摩擦抵抗μが1.0であるとき、操舵角θb以上の領域でSAT値が減少し、路面の摩擦抵抗μが0.1であるとき、操舵角θa以上の領域でSAT値が減少する例を示している。このように、路面の摩擦抵抗μが減少してタイヤがスリップした場合、基本マップ部210から出力されるトルク信号Tref_a0とSAT値に比例係数kを乗じた値とが乖離する。すなわち、タイヤのグリップが失われているにも拘らず、ハンドルの操舵力を通常の走行状態と同様に制御すると、タイヤのグリップ力が失われていることに運転者が気付かず、緊急回避操作が遅れる可能性がある。
本実施形態では、タイヤのスリップによって発生する物理量に基づき、タイヤのグリップ力が失われたことを運転者にフィードバックすることにより、運転者が緊急回避操作を行えるようにする。以下、タイヤのスリップによって発生する物理量としてSAT推定部343(図3参照)によって推定されるセルフアライニングトルクTSATを用いることで、タイヤのグリップ力が失われたことを運転者にフィードバックすることを可能とする構成について説明する。
図12に示すように、実施形態1の低μ路トルク補正値演算部280は、比例係数乗算部281と、減算部282と、トルク調整係数値マップ部283と、絶対値演算部284と、を含む。
絶対値演算部284には、セルフアライニングトルクTSATが入力される。絶対値演算部284は、入力されたセルフアライニングトルクTSATの絶対値|TSAT|を演算する。比例係数乗算部281は、入力されたセルフアライニングトルクの絶対値|TSAT|に対して、所定の比例係数kを乗じた値k(|TSAT|)を減算部282に出力する。比例係数kの値は、トルク信号Tref_a0と比例係数乗算部281の出力値k(|TSAT|)とが通常の走行状態で略一致するような値に設定される。
減算部282は、トルク信号Tref_a0から比例係数乗算部281の出力値k(|TSAT|)を減算した値Tref_a0-k(|TSAT|)をトルク調整係数値マップ部283に出力する。
トルク調整係数値マップ部283は、減算部282の出力値Tref_a0-k(|TSAT|)とトルク調整係数値Gとの関係を示すトルク調整係数値マップを保持している。図14は、実施形態1のトルク調整係数値マップ部が保持するトルク調整係数値マップの特性例を示す図である。
本開示において、トルク調整係数値Gは、1以下の正の値を取り得る。図14に示すように、トルク調整係数値マップは、減算部282の出力値Tref_a0-k(|TSAT|)が0以上A未満の領域ではトルク調整係数値Gを「1.0」、減算部282の出力値Tref_a0-k(|TSAT|)がAよりも大きいB以上の領域ではトルク調整係数値Gを「0.1」とした例を示している。また、トルク調整係数値マップは、減算部282の出力値Tref_a0-k(|TSAT|)がA以上B未満の領域において、トルク調整係数値Gが「1.0」から「0.1」まで徐々に減少する特性を有している。
なお、減算部282の出力値Tref_a0-k(|TSAT|)のA値及びB値は適宜設定される。また、減算部282の出力値Tref_a0-k(|TSAT|)のB値以上におけるトルク調整係数値Gの値は一例であって、この「0.1」に限定されない。これらの値は、運転者による操舵感に違和感を与えないような値であることが望ましい。また、トルク調整係数値マップは、図14に示されるような直線的な特性ではなく、曲線的な特性でも良い。
トルク調整係数値マップ部283は、図14に示すトルク調整係数値マップを用いて、減算部282の出力値Tref_a0-k(|TSAT|)に応じたトルク調整係数値Gを導出して出力する。なお、減算部282の出力値Tref_a0-k(|TSAT|)とトルク調整係数値Gとの関係を示す数式を用いて、トルク調整係数値Gを算出する態様であっても良い。
図8に戻り、乗算部211は、基本マップ部210から出力されるトルク信号Tref_a0に対して、符号抽出部213から出力される操舵角θhの符号と、低μ路トルク補正値演算部280から出力されるトルク調整係数値Gを乗算し、トルク信号Tref_aとして加算部261に出力する。これにより、正負の操舵角θhに応じたトルク信号Tref_aが得られる。
図15は、低μ路トルク補正値演算部から出力されるトルク調整係数値による作用例を示す図である。図15に示す例では、時刻tまでは通常の走行状態、すなわちタイヤが路面にグリップした状態であることを示し、時刻tを超えるとタイヤのグリップ力が徐々に失われていることを示している。
図15において、時刻tまでは、図中の実線で示すように、トルク信号Tref_a0と比例係数乗算部281の出力値k(|TSAT|)とが略一致している(図中の実線)。このとき、減算部282の出力値Tref_a0-k(|TSAT|)はA以下であり、このときのトルク調整係数値Gは「1.0」となる(図14参照)。
一方、図15において、時刻tを超えると、図中の実線で示すトルク信号Tref_a0と図中の一点鎖線で示す比例係数乗算部281の出力値k(|TSAT|)との差が徐々に大きくなる。このとき、減算部282の出力値Tref_a0-k(|TSAT|)がAから徐々に大きくなる。このときのトルク調整係数値Gは「1.0」から徐々に減少する(図14参照)。このため、図中の破線で示すように、トルク信号Tref_aが通常の走行状態(図中の実線)よりも小さくなる。これにより、通常の走行状態よりも操舵感が軽くなり、運転者は、タイヤのグリップ力が失われたことを認識することができ、適切な緊急回避操作を行うことができる。
以下、実施形態1の捩れ角制御部300(図5参照)について、図16を参照して説明する。
図16は、実施形態1の捩れ角制御部の一構成例を示すブロック図である。捩れ角制御部300は、目標捩れ角Δθref、捩れ角Δθ、操舵角θh及びモータ角速度ωmに基づいてモータ電流指令値Irefを演算する。捩れ角制御部300は、捩れ角フィードバック(FB)補償部310、速度制御部330、安定化補償部340、出力制限部350、舵角外乱補償部360、減算部361、加算部363、及び減速比部370を備えている。
変換部500から出力される目標捩れ角Δθrefは、減算部361に加算入力される。捩れ角Δθは、減算部361に減算入力される。操舵角θhは、舵角外乱補償部360に入力される。モータ角速度ωmは、安定化補償部340に入力される。
捩れ角FB補償部310は、減算部361で算出される目標捩れ角Δθrefと捩れ角Δθの偏差Δθ0に対して補償値CFB(伝達関数)を乗算し、目標捩れ角Δθrefに捩れ角Δθが追従するような目標コラム角速度ωref1を出力する。目標コラム角速度ωref1は、加算部363に加算出力される。補償値CFBは、単純なゲインKppでも、PI制御の補償値など一般的に用いられている補償値でも良い。
舵角外乱補償部360は、操舵角θhに対して補償値Ch(伝達関数)を乗算し、目標コラム角速度ωref2を出力する。目標コラム角速度ωref2は、加算部363に加算出力される。
加算部363は、目標コラム角速度ωref1と目標コラム角速度ωref2とを加算し、目標コラム角速度ωrefとして速度制御部330に出力する。これにより、運転者から入力される操舵角θhの変化による、トーションバー捩れ角Δθへの影響を抑制し、急操舵に対する目標捩れ角Δθrefへの捩れ角Δθの追従性を向上することができる。
運転者の操舵により操舵角θhが変化すると、操舵角θhの変化が外乱として捩れ角Δθに影響してしまい、目標捩れ角Δθrefに対してずれが発生する。特に、急な操舵に対しては、操舵角θhの変化による目標捩れ角Δθrefに対するずれが顕著に出てしまう。舵角外乱補償部360の基本的な目的は、この外乱としての操舵角θhの影響を低減させることである。
速度制御部330は、I-P制御(比例先行型PI制御)により、目標コラム角速度ωrefにコラム角速度ωcが追従するようなモータ電流指令値Isを算出する。コラム角速度ωcは、図16のように、モータ角速度ωmに減速機構である減速比部370の減速比1/Nを乗算した値としても良い。
減算部333は、目標コラム角速度ωrefとコラム角速度ωcとの差分(ωref-ωc)を算出する。積分部331は、目標コラム角速度ωrefとコラム角速度ωcとの差分(ωref-ωc)を積分し、積分結果を減算部334に加算入力する。
捩れ角速度ωtは、比例部332にも出力される。比例部332は、コラム角速度ωcに対してゲインKvpによる比例処理を行い、比例処理結果を減算部334に減算入力する。減算部334での減算結果は、モータ電流指令値Isとして出力される。なお、速度制御部330は、I-P制御ではなく、PI制御、P(比例)制御、PID(比例積分微分)制御、PI-D制御(微分先行型PID制御)、モデルマッチング制御、モデル規範制御等の一般的に用いられている制御方法でモータ電流指令値Isを算出しても良い。
出力制限部350は、モータ電流指令値Isに対する上限値及び下限値が予め設定されている。モータ電流指令値Isの上下限値を制限して、モータ電流指令値Irefを出力する。
なお、本実施形態における捩れ角制御部300の構成は一例であり、図16に示す構成とは異なる態様であっても良い。例えば、捩れ角制御部300は、舵角外乱補償部360及び加算部363や、減速比部370を具備しない構成であっても良い。
(変形例1)
図17は、実施形態1の変形例1の目標操舵トルク生成部の一構成例を示すブロック図である。図18は、実施形態1の変形例1の低μ路トルク補正値演算部の一構成例を示すブロック図である。なお、上述した実施形態1の構成と同じ構成部には同一の符号を付して重複する説明は省略する。
図17は、実施形態1の変形例1の目標操舵トルク生成部の一構成例を示すブロック図である。図18は、実施形態1の変形例1の低μ路トルク補正値演算部の一構成例を示すブロック図である。なお、上述した実施形態1の構成と同じ構成部には同一の符号を付して重複する説明は省略する。
図17に示すように、目標操舵トルク生成部200aは、乗算部211に代えて、減算部212を備える。また、目標操舵トルク生成部200aは、乗算部214を備える。
図17及び図18に示すように、低μ路トルク補正値演算部280aには、基本マップ部210から出力されるトルク信号Tref_a0、及びSAT推定部343(図3参照)から出力されるセルフアライニングトルクTSATに加え、車速Vsが入力される。
図18に示すように、実施形態1の変形例1の低μ路トルク補正値演算部280aは、比例係数乗算部281aと、減算部282aと、トルク調整減算値マップ部283aと、絶対値演算部284aと、を含む。
絶対値演算部284aには、セルフアライニングトルクTSATが入力される。絶対値演算部284aは、入力されたセルフアライニングトルクTSATの絶対値|TSAT|を演算する。比例係数乗算部281aは、入力されたセルフアライニングトルクTSATの絶対値|TSAT|に対して、所定の比例係数kを乗じた値k(|TSAT|)を減算部282aに出力する。比例係数kの値は、トルク信号Tref_a0と比例係数乗算部281aの出力値k(|TSAT|)とが通常の走行状態で略一致するような値に設定される。
減算部282aは、トルク信号Tref_a0から比例係数乗算部281aの出力値k(|TSAT|)を減算した値Tref_a0-k(|TSAT|)をトルク調整減算値マップ部283aに出力する。
トルク調整減算値マップ部283aは、減算部282aの出力値Tref_a0-k(|TSAT|)とトルク調整減算値Sと車速Vsとの関係を示すトルク調整減算値マップを保持している。図19は、実施形態1の変形例1のトルク調整減算値マップ部が保持するトルク調整減算値マップの特性例を示す図である。
図19に示すように、トルク調整減算値マップは、減算部282aの出力値Tref_a0-k(|TSAT|)が0以上A未満の領域ではトルク調整減算値Sを「0」、減算部282の出力値Tref_a0-k(|TSAT|)がAよりも大きいB以上の領域では、トルク調整減算値Sを車速Vsに応じた一定値とした例を示している。また、トルク調整減算値マップは、減算部282aの出力値Tref_a0-k(|TSAT|)がA以上B未満の領域において、トルク調整減算値Sが「0」から徐々に上昇する特性を有している。
なお、減算部282aの出力値Tref_a0-k(|TSAT|)のA値及びB値は適宜設定される。また、減算部282aの出力値Tref_a0-k(|TSAT|)のA値以上におけるトルク調整減算値Sの値は、車速Vsに応じて変化するトルク信号Tref_a0の大きさを超えない値に設定される。これらの値は、運転者による操舵感に違和感を与えないような値であることが望ましい。また、トルク調整減算値マップは、図19に示されるような直線的な特性ではなく、曲線的な特性でも良い。
トルク調整減算値マップ部283aは、図19に示すトルク調整減算値マップを用いて、減算部282aの出力値Tref_a0-k(|TSAT|)に応じたトルク調整減算値Sを導出して出力する。なお、減算部282aの出力値Tref_a0-k(|TSAT|)とトルク調整減算値Sと車速Vsとの関係を示す数式を用いて、トルク調整減算値Sを算出する態様であっても良い。
図17に戻り、減算部212は、基本マップ部210から出力されるトルク信号Tref_a0から、低μ路トルク補正値演算部280aから出力されるトルク調整減算値Sを減算する。乗算部214は、減算部212の出力値に対して符号抽出部213から出力される操舵角θhの符号を乗算し、トルク信号Tref_aとして加算部261に出力する。これにより、正負の操舵角θhに応じたトルク信号Tref_aが得られる。
図17及び図18に示す実施形態1の変形例1の構成においても、上述した実施形態1に係る構成と同様に、タイヤのグリップ力が失われた状態において、トルク信号Tref_aを通常の走行状態(図15中の実線)よりも小さくすることができる(図15中の破線)。これにより、通常の走行状態よりも操舵感が軽くなり、運転者は、タイヤのグリップ力が失われたことを認識することができ、適切な緊急回避操作を行うことができる。
(変形例2)
図20は、実施形態1の変形例2に係るコントロールユニットの内部ブロック構成の一例を示す図である。図21は、実施形態1の変形例2の目標操舵トルク生成部の一構成例を示すブロック図である。図22は、実施形態1の変形例2の低μ路トルク補正値演算部の一構成例を示すブロック図である。なお、上述した実施形態1の構成と同じ構成部には同一の符号を付して重複する説明は省略する。
図20は、実施形態1の変形例2に係るコントロールユニットの内部ブロック構成の一例を示す図である。図21は、実施形態1の変形例2の目標操舵トルク生成部の一構成例を示すブロック図である。図22は、実施形態1の変形例2の低μ路トルク補正値演算部の一構成例を示すブロック図である。なお、上述した実施形態1の構成と同じ構成部には同一の符号を付して重複する説明は省略する。
実施形態1の変形例2の構成では、図20に示すように、目標操舵トルク生成部200bには、ヨーレートセンサ15(図1参照)によって検出される実ヨーレートγが入力される。実施形態1の変形例2では、タイヤのスリップによって発生する物理量として実ヨーレートγを用いることで、タイヤのグリップ力が失われたことを運転者にフィードバックすることを可能とする構成について説明する。
図21及び図22に示すように、低μ路トルク補正値演算部280bには、基本マップ部210から出力されるトルク信号Tref_a0、及びSAT推定部343(図3参照)から出力されるセルフアライニングトルクTSATに代えて、実ヨーレートγが入力される。
図22に示すように、実施形態1の変形例2の低μ路トルク補正値演算部280bは、比例係数乗算部281bと、減算部282bと、トルク調整係数値マップ部283bと、絶対値演算部284bと、を含む。
絶対値演算部284bには、実ヨーレートγが入力される。絶対値演算部284bは、入力された実ヨーレートγの絶対値|γ|を演算する。比例係数乗算部281bは、入力された実ヨーレートの絶対値|γ|に対して、所定の比例係数k’を乗じた値k’|γ|を減算部282bに出力する。比例係数k’の値は、トルク信号Tref_a0と比例係数乗算部281bの出力値k’|γ|とが通常の走行状態で略一致するような値に設定される。
減算部282bは、トルク信号Tref_a0から比例係数乗算部281bの出力値k’|γ|を減算した値Tref_a0-k|γ|をトルク調整係数値マップ部283bに出力する。
トルク調整係数値マップ部283bは、減算部282bの出力値Tref_a0-k’|γ|とトルク調整係数値Gとの関係を示すトルク調整係数値マップを保持している。実施形態1の変形例2に係るトルク調整係数値マップの特性は、図14に示す実施形態1のトルク調整係数値マップ部283が保持するトルク調整係数値マップと同様であり、減算部282の出力値Tref_a0-k(|TSAT|)を減算部282bの出力値Tref_a0-k’|γ|に読み替えることで対応可能である。
トルク調整係数値マップ部283bは、上述したトルク調整係数値マップを用いて、減算部282bの出力値Tref_a0-k’|γ|に応じたトルク調整係数値Gを導出して出力する。なお、減算部282bの出力値Tref_a0-k’|γ|とトルク調整係数値Gとの関係を示す数式を用いて、トルク調整係数値Gを算出する態様であっても良い。
図21に戻り、乗算部211は、基本マップ部210から出力されるトルク信号Tref_a0に対して、符号抽出部213から出力される操舵角θhの符号と、低μ路トルク補正値演算部280bから出力されるトルク調整係数値Gを乗算し、トルク信号Tref_aとして加算部261に出力する。これにより、正負の操舵角θhに応じたトルク信号Tref_aが得られる。
図20から図22に示す実施形態1の変形例2の構成においても、上述した実施形態1に係る構成と同様に、タイヤのグリップ力が失われた状態において、トルク信号Tref_aを通常の走行状態(図15中の実線)よりも小さくすることができる(図15中の破線)。これにより、通常の走行状態よりも操舵感が軽くなり、運転者は、タイヤのグリップ力が失われたことを認識することができ、適切な緊急回避操作を行うことができる。
(変形例3)
図23は、実施形態1の変形例3の目標操舵トルク生成部の一構成例を示すブロック図である。図24は、実施形態1の変形例3の低μ路トルク補正値演算部の一構成例を示すブロック図である。なお、上述した実施形態1の変形例2の構成と同じ構成部には同一の符号を付して重複する説明は省略する。
図23は、実施形態1の変形例3の目標操舵トルク生成部の一構成例を示すブロック図である。図24は、実施形態1の変形例3の低μ路トルク補正値演算部の一構成例を示すブロック図である。なお、上述した実施形態1の変形例2の構成と同じ構成部には同一の符号を付して重複する説明は省略する。
図23に示すように、目標操舵トルク生成部200cは、乗算部211に代えて、減算部212を備える。
図23及び図24に示すように、低μ路トルク補正値演算部280cには、基本マップ部210から出力されるトルク信号Tref_a0、及びヨーレートセンサ15(図1参照)によって検出される実ヨーレートγに加え、車速Vsが入力される。
図24に示すように、実施形態1の変形例1の低μ路トルク補正値演算部280cは、比例係数乗算部281cと、減算部282cと、トルク調整減算値マップ部283cと、絶対値演算部284cと、を含む。
絶対値演算部284cには、実ヨーレートγが入力される。絶対値演算部284cは、入力された実ヨーレートγの絶対値|γ|を演算する。比例係数乗算部281cは、入力された実ヨーレートの絶対値|γ|に対して、所定の比例係数k’を乗じた値k’|γ|を減算部282cに出力する。比例係数k’の値は、トルク信号Tref_a0と比例係数乗算部281cの出力値k’|γ|とが通常の走行状態で略一致するような値に設定される。
減算部282cは、トルク信号Tref_a0から比例係数乗算部281cの出力値k’γを減算した値Tref_a0-k’|γ|をトルク調整減算値マップ部283cに出力する。
トルク調整減算値マップ部283cは、減算部282cの出力値Tref_a0-k’|γ|とトルク調整減算値Sと車速Vsとの関係を示すトルク調整減算値マップを保持している。実施形態1の変形例3に係るトルク調整減算値マップの特性は、図24に示す実施形態1の変形例1のトルク調整減算値マップ部283aが保持するトルク調整減算値マップと同様であり、減算部282aの出力値Tref_a0-k(|TSAT|)を減算部282cの出力値Tref_a0-k’|γ|に読み替えることで対応可能である。
トルク調整減算値マップ部283cは、上述したトルク調整減算値マップを用いて、減算部282cの出力値Tref_a0-k’|γ|に応じたトルク調整減算値Sを導出して出力する。なお、減算部282cの出力値Tref_a0-k’|γ|とトルク調整減算値Sと車速Vsとの関係を示す数式を用いて、トルク調整減算値Sを算出する態様であっても良い。
図23に戻り、減算部212は、基本マップ部210から出力されるトルク信号Tref_a0から、低μ路トルク補正値演算部280cから出力されるトルク調整減算値Sを減算する。乗算部214は、減算部212の出力値に対して符号抽出部213から出力される操舵角θhの符号を乗算し、トルク信号Tref_aとして加算部261に出力する。これにより、正負の操舵角θhに応じたトルク信号Tref_aが得られる。
図23及び図24に示す実施形態1の変形例3の構成においても、上述した実施形態1に係る構成と同様に、タイヤのグリップ力が失われた状態において、トルク信号Tref_aを通常の走行状態(図15中の実線)よりも小さくすることができる(図15中の破線)。これにより、通常の走行状態よりも操舵感が軽くなり、運転者は、タイヤのグリップ力が失われたことを認識することができ、適切な緊急回避操作を行うことができる。
なお、上述した実施形態1及びその変形例1から3では、タイヤのスリップによって発生する物理量として、SAT推定部343(図3参照)によって推定されるセルフアライニングトルクTSATや、ヨーレートセンサ15(図1参照)によって検出される実ヨーレートγを用いる構成を例示したが、例えば、タイヤのスリップによって発生する物理量として、横加速度センサ16(図1参照)によって検出される実横加速度を用いる構成としても、上述した実施形態1及びその変形例1から3と同様の効果を得ることができる。
(実施形態2)
図25は、実施形態2に係るコントロールユニットの内部ブロック構成の一例を示す図である。なお、上述した実施形態1で説明した構成と同じ構成部には同一の符号を付して重複する説明は省略する。実施形態2に係るコントロールユニット(ECU)30aは、目標操舵トルク生成部201及び捩れ角制御部300aの構成が実施形態1とは異なる。
図25は、実施形態2に係るコントロールユニットの内部ブロック構成の一例を示す図である。なお、上述した実施形態1で説明した構成と同じ構成部には同一の符号を付して重複する説明は省略する。実施形態2に係るコントロールユニット(ECU)30aは、目標操舵トルク生成部201及び捩れ角制御部300aの構成が実施形態1とは異なる。
目標操舵トルク生成部201には、操舵角θh、車速Vs、車速判定信号Vfailに加え、操舵トルクTs及びモータ角θmが入力される。
捩れ角制御部300aは、捩れ角Δθが目標捩れ角Δθrefとなるようなモータ電流指令値Imcを演算する。モータ20は、モータ電流指令値Imcにより駆動される。
図26は、実施形態2の目標操舵トルク生成部の一構成例を示すブロック図である。図26に示すように、実施形態2の目標操舵トルク生成部201は、実施形態1において説明した構成に加え、SAT情報補正部250及び加算部263を備える。
SAT情報補正部250には、操舵角θh、車速Vs、操舵トルクTs、モータ角θm及びモータ電流指令値Imcが入力される。SAT情報補正部250は、操舵トルクTs、モータ角θm及びモータ電流指令値Imcに基づいてセルフアライニングトルク(SAT)を算出し、更にフィルタ処理、ゲイン乗算及び制限処理を施して、トルク信号(第1トルク信号)Tref_dを演算する。
図27は、SAT情報補正部の一構成例を示すブロック図である。SAT情報補正部250は、SAT算出部251、フィルタ部252、操舵トルク感応ゲイン部253、車速感応ゲイン部254、舵角感応ゲイン部255、及び制限部256を備える。
ここで、路面からステアリングまでの間に発生するトルクの様子について、図28を参照して説明する。図28は、路面からステアリングまでの間に発生するトルクの様子を示すイメージ図である。
運転者がハンドルを操舵することによって操舵トルクTsが発生し、その操舵トルクTsに従ってモータ20がアシストトルク(モータトルク)Tmを発生する。その結果、車輪が転舵され、反力としてセルフアライニングトルクTSATが発生する。その際、コラム軸換算慣性(モータ20(のロータ)、減速機構等によりコラム軸に作用する慣性)J及び摩擦(静摩擦)Frによってハンドル操舵の抵抗となるトルクが生じる。更に、モータ20の回転速度により、ダンパ項(ダンパ係数DM)として表現される物理的なトルク(粘性トルク)が発生する。これらの力の釣り合いから、下記(12)式に示す運動方程式が得られる。
J×αM+Fr×sign(ωM)+DM×ωM=Tm+Ts+TSAT・・・(12)
上記(12)式において、ωMはコラム軸換算(コラム軸に対する値に変換)されたモータ角速度であり、αMはコラム軸換算されたモータ角加速度である。そして、上記(12)式をTSATについて解くと、下記(13)式が得られる。
TSAT=-Tm-Ts+J×αM+Fr×sign(ωM)+DM×ωM・・・(13)
上記(13)式からわかるように、コラム軸換算慣性J、静摩擦Fr及びダンパ係数DMを定数として予め求めておくことで、モータ角速度ωM、モータ角加速度αM、アシストトルクTm及び操舵トルクTsよりセルフアライニングトルクTSATを算出することができる。なお、コラム軸換算慣性Jは、簡易的にモータ慣性と減速比の関係式を用いてコラム軸に換算した値でも良い。
SAT算出部251には、操舵トルクTs、モータ角θm、及びモータ電流指令値Imcが入力される。SAT算出部251は、上記(13)式を用いて、セルフアライニングトルクTSATを算出する。SAT算出部251は、換算部251A、角速度演算部251B、角加速度演算部251C、ブロック251D、ブロック251E、ブロック251F、ブロック251G、及び加算器251H,251I,251Jを備える。
換算部251Aには、モータ電流指令値Imcが入力される。換算部251Aは、予め定められたギア比及びトルク定数を乗算することにより、コラム軸換算されたアシストトルクTmを算出する。
角速度演算部251Bには、モータ角θmが入力される。角速度演算部251Bは、微分処理及びギア比の乗算により、コラム軸換算されたモータ角速度ωMが算出される。
角加速度演算部251Cには、モータ角速度ωMが入力される。角加速度演算部251Cは、モータ角速度ωMを微分し、コラム軸換算されたモータ角加速度αMを算出する。
そして、入力された操舵トルクTs並びに算出された上記アシストトルクTm、モータ角速度ωM及びモータ角加速度αMを用いて、ブロック251D、ブロック251E、ブロック251F、ブロック251G、及び加算器251H,251I,251Jにより、数8に基づいて、図27に示されるような構成によりセルフアライニングトルクTSATが算出される。
ブロック251Dには、角速度演算部251Bから出力されたモータ角速度ωMが入力される。ブロック251Dは、符号関数として機能し、入力データの符号を出力する。
ブロック251Eには、角速度演算部251Bから出力されたモータ角速度ωMが入力される。ブロック251Eは、入力データにダンパ係数DMを乗算して出力する。
ブロック251Fは、ブロック251Dからの入力データに静摩擦Frを乗算して出力する。
ブロック251Gには、角加速度演算部251Cから出力されたモータ角加速度αMが入力される。ブロック251Gは、入力データにコラム軸換算慣性Jを乗算して出力する。
加算器251Hは、操舵トルクTsと換算部251Aから出力されるアシストトルクTmとを加算する。
加算器251Iは、加算器251Hの出力からブロック251Gの出力を減算する。
加算器251Jは、ブロック251Eの出力とブロック251Fの出力とを加算し、加算器251Iの出力を減算する。
上記構成により、上記(13)式を実現することができる。すなわち、図27に示すSAT算出部251の構成により、セルフアライニングトルクTSATが算出される。
なお、コラム角が直接検出可能な場合は、モータ角θmの代わりにコラム角を角度情報として使用しても良い。この場合、コラム軸換算は不要となる。また、モータ角θmではなく、EPS操舵系/車両系100からのモータ角速度ωmをコラム軸換算した信号をモータ角速度ωMとして入力し、モータ角θmに対する微分処理を省略しても良い。更に、セルフアライニングトルクTSATは、上記以外の方法で算出しても良く、算出値ではなく、測定値を使用しても良い。
SAT算出部251にて算出されたセルフアライニングトルクTSATを活用し運転者に操舵感として適切に伝えるために、フィルタ部252により、伝えたい情報をセルフアライニングトルクTSATから抽出し、操舵トルク感応ゲイン部253、車速感応ゲイン部254及び舵角感応ゲイン部255により伝える量を調整し、更に、制限部256により上下限値を調整する。なお、本開示において、SAT算出部251にて算出されるセルフアライニングトルクTSATは、目標操舵トルク生成部201にも出力される。
フィルタ部252には、SAT算出部251からセルフアライニングトルクTSATが入力される。フィルタ部252は、例えばバンドバスフィルタにより、セルフアライニングトルクTSATに対してフィルタ処理を行い、SAT情報TST1を出力する。
操舵トルク感応ゲイン部253には、フィルタ部252から出力されるSAT情報TST1及び操舵トルクTsが入力される。操舵トルク感応ゲイン部253は、操舵トルク感応ゲインを設定する。
図29は、操舵トルク感応ゲインの特性例を示す図である。図29に示されるように、操舵トルク感応ゲイン部253は、直進走行状態であるオンセンタ近辺で感度が高くなるように、操舵トルク感応ゲインを設定する。操舵トルク感応ゲイン部253は、操舵トルクTsに応じて設定される操舵トルク感応ゲインをSAT情報TST1に乗算し、SAT情報TST2を出力する。
図29において、操舵トルク感応ゲインは、操舵トルクTsがTs1(例えば2Nm)以下では1.0で固定とし、操舵トルクTsがTs2(>Ts1)(例えば4Nm)以上では1.0より小さい値で固定とし、操舵トルクTsがTs1とTs2の間では一定の割合で減少するように設定した例を示している。
車速感応ゲイン部254には、操舵トルク感応ゲイン部253から出力されるSAT情報TST2及び車速Vsが入力される。車速感応ゲイン部254は、車速感応ゲインを設定する。
図30は、車速感応ゲインの特性例を示す図である。図30に示されるように、車速感応ゲイン部254は、高速走行時の感度が高くなるように、車速感応ゲインを設定する。車速感応ゲイン部254は、車速Vsに応じて設定される車速感応ゲインをSAT情報TST2に乗算し、SAT情報TST3を出力する。
図30において、車速感応ゲインは、車速VsがVs2(例えば70km/h)以上では1.0で固定とし、車速VsがVs1(<Vs2)(例えば50km/h)以下では1.0より小さい値で固定とし、車速VsがVs1とVs2の間では一定の割合で増加するように設定した例を示している。
舵角感応ゲイン部255には、車速感応ゲイン部254から出力されるSAT情報TST3及び操舵角θhが入力される。舵角感応ゲイン部255は、舵角感応ゲインを設定する。
図31は、舵角感応ゲインの特性例を示す図である。図31に示されるように、舵角感応ゲイン部255は、所定の操舵角から作用し始め、操舵角が大きい時の感度が高くなるように、舵角感応ゲインを設定する。舵角感応ゲイン部255は、操舵角θhに応じて設定される舵角感応ゲインをSAT情報TST3に乗算し、トルク信号Tref_d0を出力する。
図31において、舵角感応ゲインは、操舵角θhがθh1(例えば10deg)以下では所定のゲイン値Gαで、操舵角θhがθh2(例えば30deg)以上では1.0で固定とし、操舵角θhがθh1とθh2の間では一定の割合で増加するように設定した例を示している。操舵角θhが大きいときの感度を高くしたい場合は、Gαを0≦Gα<1の範囲に設定すれば良い。操舵角θhが小さいときの感度を高くしたい場合は、図示していないが、Gαを1<Gαの範囲に設定すれば良い。操舵角θhによる感度を変えたくない場合は、Gα=1として設定すれば良い。
制限部256には、舵角感応ゲイン部255から出力されるトルク信号Tref_d0が入力される。制限部256は、トルク信号Tref_d0の上限値及び下限値が設定されている。
図32は、制限部におけるトルク信号の上限値及び下限値の設定例を示す図である。図32に示されるように、制限部256は、トルク信号Tref_d0に対する上限値及び下限値が予め設定され、入力するトルク信号Tref_d0が、上限値以上の場合は上限値を、下限値以下の場合は下限値を、それ以外の場合はトルク信号Tref_d0を、トルク信号Tref_dとして出力する。
なお、操舵トルク感応ゲイン、車速感応ゲイン、及び舵角感応ゲインは、図29、図30、及び図31に示されるような直線的な特性ではなく、曲線的な特性でも良い。また、操舵トルク感応ゲイン、車速感応ゲイン、及び舵角感応ゲインは、操舵フィーリングに応じて設定を適宜調整しても良い。また、トルク信号の大きさが増大するおそれがない場合や他の手段で抑制する場合等では、制限部256を削除しても良い。操舵トルク感応ゲイン部253、車速感応ゲイン部254、及び舵角感応ゲイン部255についても、適宜、省略可能である。また、操舵トルク感応ゲイン、車速感応ゲイン、及び舵角感応ゲインの設置位置を入れ替えても良い。また、例えば、操舵トルク感応ゲイン、車速感応ゲイン、及び舵角感応ゲインを並列に求め、1つの構成部でSAT情報TST1に乗算する態様であっても良い。
すなわち、本実施形態におけるSAT情報補正部250の構成は一例であり、図27に示す構成とは異なる態様であっても良い。
本実施形態においても、上述した実施形態1において説明した低μ路トルク補正値演算部280を目標操舵トルク生成部201に備えた構成とすることで、実施形態1と同様の効果を得ることができる。具体的に、SAT算出部251(図27参照)にて算出されるセルフアライニングトルクTSATを、図11に示す低μ路トルク補正値演算部280に入力する構成とすれば良い。
以下、実施形態2の捩れ角制御部300aについて、図33を参照して説明する。
図33は、実施形態2の捩れ角制御部の一構成例を示すブロック図である。捩れ角制御部300aは、目標捩れ角Δθref、捩れ角Δθ及びモータ角速度ωmに基づいてモータ電流指令値Imcを演算する。捩れ角制御部300aは、捩れ角フィードバック(FB)補償部310、捩れ角速度演算部320、速度制御部330、安定化補償部340、出力制限部350、減算部361及び加算部362を備えている。
変換部500から出力される目標捩れ角Δθrefは、減算部361に加算入力される。捩れ角Δθは、減算部361に減算入力されると共に、捩れ角速度演算部320に入力される。モータ角速度ωmは、安定化補償部340に入力される。
捩れ角FB補償部310は、減算部361で算出される目標捩れ角Δθrefと捩れ角Δθの偏差Δθ0に対して補償値CFB(伝達関数)を乗算し、目標捩れ角Δθrefに捩れ角Δθが追従するような目標捩れ角速度ωrefを出力する。補償値CFBは、単純なゲインKppでも、PI制御の補償値など一般的に用いられている補償値でも良い。
目標捩れ角速度ωrefは、速度制御部330に入力される。捩れ角FB補償部310及び速度制御部330により、目標捩れ角Δθrefに捩れ角Δθを追従させ、所望の操舵トルクを実現することが可能となる。
捩れ角速度演算部320は、捩れ角Δθに対して微分演算処理を行い、捩れ角速度ωtを算出する。捩れ角速度ωtは、速度制御部330に出力される。捩れ角速度演算部320は、微分演算として、HPFとゲインによる擬似微分を行なっても良い。また、捩れ角速度演算部320は、捩れ角速度ωtを別の手段や捩れ角Δθ以外から算出し、速度制御部330に出力するようにしても良い。
速度制御部330は、I-P制御(比例先行型PI制御)により、目標捩れ角速度ωrefに捩れ角速度ωtが追従するようなモータ電流指令値Imca1を算出する。
減算部333は、目標捩れ角速度ωrefと捩れ角速度ωtとの差分(ωref-ωt)を算出する。積分部331は、目標捩れ角速度ωrefと捩れ角速度ωtとの差分(ωref-ωt)を積分し、積分結果を減算部334に加算入力する。
捩れ角速度ωtは、比例部332にも出力される。比例部332は、捩れ角速度ωtに対してゲインKvpによる比例処理を行い、比例処理結果を減算部334に減算入力する。減算部334での減算結果は、モータ電流指令値Imca1として出力される。なお、速度制御部330は、I-P制御ではなく、PI制御、P(比例)制御、PID(比例積分微分)制御、PI-D制御(微分先行型PID制御)、モデルマッチング制御、モデル規範制御等の一般的に用いられている制御方法でモータ電流指令値Imca1を算出しても良い。
安定化補償部340は、補償値Cs(伝達関数)を有しており、モータ角速度ωmからモータ電流指令値Imca2を算出する。追従性及び外乱特性を向上させるために、捩れ角FB補償部310及び速度制御部330のゲインを上げると、高域の制御的な発振現象が発生してしまう。この対策として、モータ角速度ωmに対し、安定化するために必要な伝達関数(Cs)を安定化補償部340に設定する。これにより、EPS制御システム全体の安定化を実現することができる。
加算部362は、速度制御部330からのモータ電流指令値Imca1と安定化補償部340からのモータ電流指令値Imca2とを加算し、モータ電流指令値Imcbとして出力する。
出力制限部350は、モータ電流指令値Imcbに対する上限値及び下限値が予め設定されている。出力制限部350は、モータ電流指令値Imcbの上下限値を制限して、モータ電流指令値Imcを出力する。
なお、本実施形態における捩れ角制御部300aの構成は一例であり、図33に示す構成とは異なる態様であっても良い。例えば、捩れ角制御部300aは、安定化補償部340を具備しない構成であっても良い。
(変形例)
図34は、実施形態2の変形例の目標操舵トルク生成部の一構成例を示すブロック図である。なお、上述した実施形態2の構成と同じ構成部には同一の符号を付して重複する説明は省略する。
図34は、実施形態2の変形例の目標操舵トルク生成部の一構成例を示すブロック図である。なお、上述した実施形態2の構成と同じ構成部には同一の符号を付して重複する説明は省略する。
図34に示すように、実施形態2の変形例においても、上述した実施形態1の変形例1において説明した低μ路トルク補正値演算部280aを目標操舵トルク生成部201aに備えた構成とすることで、実施形態1の変形例1と同様の効果を得ることができる。具体的に、SAT算出部251(図27参照)にて算出されるセルフアライニングトルクTSATを、図17に示す低μ路トルク補正値演算部280aに入力する構成とすれば良い。
なお、上述した実施形態2及びその変形例では、タイヤのスリップによって発生する物理量として、SAT算出部251(図27参照)にて算出されるセルフアライニングトルクTSATを用いる構成を例示したが、本実施形態においても、実施形態1の変形例2,3と同様に、タイヤのスリップによって発生する物理量として、ヨーレートセンサ15(図1参照)によって検出される実ヨーレートγを用いる構成とすることも可能である。また、本実施形態においても、例えば、タイヤのスリップによって発生する物理量として、横加速度センサ16(図1参照)によって検出される実横加速度を用いる構成としても、上述した実施形態1,2と同様の効果を得ることができる。
(実施形態3)
実施形態1,2では、車両用操向装置の1つとして、本開示をコラム型EPSに適用しているが、本開示はコラム型等の上流型に限られず、ラック&ピニオン等の下流型EPSにも適用可能である。更に、目標捩れ角に基づくフィードバック制御を行うということでは、トーションバー(バネ定数任意)及び捩れ角検出用のセンサを少なくとも備えるステアバイワイヤ(SBW)反力装置等にも適用可能である。本開示を、トーションバーを備えたSBW反力装置に適用した場合の実施形態(実施形態3)について説明する。
実施形態1,2では、車両用操向装置の1つとして、本開示をコラム型EPSに適用しているが、本開示はコラム型等の上流型に限られず、ラック&ピニオン等の下流型EPSにも適用可能である。更に、目標捩れ角に基づくフィードバック制御を行うということでは、トーションバー(バネ定数任意)及び捩れ角検出用のセンサを少なくとも備えるステアバイワイヤ(SBW)反力装置等にも適用可能である。本開示を、トーションバーを備えたSBW反力装置に適用した場合の実施形態(実施形態3)について説明する。
まずは、SBW反力装置を含むSBWシステム全体について説明する。図35は、SBWシステムの構成例を、図1に示される電動パワーステアリング装置の一般的な構成に対応させて示した図である。なお、上述した実施形態1,2で説明した構成と同一構成には同一符号を付し、詳細な説明は省略する。
SBWシステムは、図1におけるユニバーサルジョイント4aにてコラム軸2と機械的に結合されるインターミディエイトシャフトがなく、ハンドル1の操作を電気信号によって操向車輪8L,8R等からなる転舵機構に伝えるシステムである。図35に示されるように、SBWシステムは反力装置60及び駆動装置70を備え、コントロールユニット(ECU)50が両装置の制御を行う。反力装置60は、舵角センサ14にて操舵角θhの検出を行うと同時に、操向車輪8L,8Rから伝わる車両の運動状態を反力トルクとして運転者に伝達する。反力トルクは、反力用モータ61により生成される。なお、SBWシステムの中には反力装置内にトーションバーを有さないタイプもあるが、本開示を適用するSBWシステムはトーションバーを有するタイプであり、トルクセンサ10にて操舵トルクTsを検出する。また、角度センサ74が、反力用モータ61のモータ角θmを検出する。駆動装置70は、運転者によるハンドル1の操舵に合わせて、駆動用モータ71を駆動し、その駆動力を、ギア72を介してピニオンラック機構5に付与し、タイロッド6a,6bを経て、操向車輪8L,8Rを転舵する。ピニオンラック機構5の近傍には角度センサ73が配置されており、操向車輪8L,8Rの転舵角θtを検出する。ECU50は、反力装置60及び駆動装置70を協調制御するために、両装置から出力される操舵角θhや転舵角θt等の情報に加え、車速センサ12からの車速Vs等を基に、反力用モータ61を駆動制御する電圧制御指令値Vref1及び駆動用モータ71を駆動制御する電圧制御指令値Vref2を生成する。
このようなSBWシステムに本開示を適用した実施形態3の構成について説明する。
図36は、実施形態3の構成を示すブロック図である。実施形態3は、捩れ角Δθに対する制御(以下、「捩れ角制御」とする)と、転舵角θtに対する制御(以下、「転舵角制御」とする)を行い、反力装置を捩れ角制御で制御し、駆動装置を転舵角制御で制御する。なお、駆動装置は他の制御方法で制御しても良い。
捩れ角制御では、実施形態2と同様の構成及び動作により、捩れ角Δθが、操舵角θh等を用いて目標操舵トルク生成部202及び変換部500を経て算出される目標捩れ角Δθrefに追従するような制御を行う。モータ角θmは角度センサ74で検出され、モータ角速度ωmは、角速度演算部951にてモータ角θmを微分することにより算出される。転舵角θtは角度センサ73で検出される。また、実施形態1ではEPS操舵系/車両系100内の処理として詳細な説明は行われていないが、電流制御部130は、図3に示される減算部32B、PI制御部35、PWM制御部36及びインバータ回路37と同様の構成及び動作により、捩れ角制御部300aから出力されるモータ電流指令値Imc及びモータ電流検出器140で検出される反力用モータ61の電流値Imrに基づいて、反力用モータ61を駆動して、電流制御を行う。
転舵角制御では、目標転舵角生成部910にて操舵角θhに基づいて目標転舵角θtrefが生成され、目標転舵角θtrefは転舵角θtと共に転舵角制御部920に入力され、転舵角制御部920にて、転舵角θtが目標転舵角θtrefとなるようなモータ電流指令値Imctが演算される。そして、モータ電流指令値Imct及びモータ電流検出器940で検出される駆動用モータ71の電流値Imdに基づいて、電流制御部930が、電流制御部130と同様の構成及び動作により、駆動用モータ71を駆動して、電流制御を行う。なお、本開示において、転舵角制御部920にて算出されるモータ電流指令値Imctは、目標操舵トルク生成部202にも出力される。
図37は、目標転舵角生成部の構成例示す図である。目標転舵角生成部910は、制限部931、レート制限部932及び補正部933を備える。
制限部931は、操舵角θhの上下限値を制限して、操舵角θh1を出力する。図33に示す捩れ角制御部300a内の出力制限部350と同様に、操舵角θhに対する上限値及び下限値を予め設定して制限をかける。
レート制限部932は、操舵角の急変を回避するために、操舵角θh1の変化量に対して制限値を設定して制限をかけ、操舵角θh2を出力する。例えば、1サンプル前の操舵角θh1からの差分を変化量とし、その変化量の絶対値が所定の値(制限値)より大きい場合、変化量の絶対値が制限値となるように、操舵角θh1を加減算し、操舵角θh2として出力し、制限値以下の場合は、操舵角θh1をそのまま操舵角θh2として出力する。なお、変化量の絶対値に対して制限値を設定するのではなく、変化量に対して上限値及び下限値を設定して制限をかけるようにしても良く、変化量ではなく変化率や差分率に対して制限をかけるようにしても良い。
補正部933は、操舵角θh2を補正して、目標転舵角θtrefを出力する。例えば、操舵角θh2の大きさ|θh2|に対する目標転舵角θtrefの特性を定義したマップを用いて、操舵角θh2より目標転舵角θtrefを求める。或いは、単純に、操舵角θh2に所定のゲインを乗算することにより、目標転舵角θtrefを求めるようにしても良い。
図38は、転舵角制御部の構成例を示す図である。転舵角制御部920は、図33に示される捩れ角制御部300aの構成例において安定化補償部340及び加算部362を除いた構成と同様の構成をしており、目標捩れ角Δθref及び捩れ角Δθの代わりに目標転舵角θtref及び転舵角θtを入力し、転舵角フィードバック(FB)補償部921、転舵角速度演算部922、速度制御部923、出力制限部926及び減算部927が、それぞれ捩れ角FB補償部310、捩れ角速度演算部320、速度制御部330、出力制限部350及び減算部361と同様の構成で同様の動作を行う。
このような構成において、実施形態3の動作例を、図39のフローチャートを参照して説明する。図39は、実施形態3の動作例を示すフローチャートである。
動作を開始すると、角度センサ73は転舵角θtを検出し、角度センサ74はモータ角θmを検出し(ステップS110)、転舵角θtは転舵角制御部920に、モータ角θmは角速度演算部951にそれぞれ入力される。
角速度演算部951は、モータ角θmを微分してモータ角速度ωmを算出し、捩れ角制御部300aに出力する(ステップS120)。
その後、目標操舵トルク生成部202において、図7に示されるステップS10~S40と同様の動作を実行し、反力用モータ61を駆動し、電流制御を実施する(ステップS130~S160)。
一方、転舵角制御においては、目標転舵角生成部910が操舵角θhを入力し、操舵角θhは制限部931に入力される。制限部931は、予め設定された上限値及び下限値により操舵角θhの上下限値を制限し(ステップS170)、操舵角θh1としてレート制限部932に出力する。レート制限部932は、予め設定された制限値により操舵角θh1の変化量に対して制限をかけ(ステップS180)、操舵角θh2として補正部933に出力する。補正部933は、操舵角θh2を補正して目標転舵角θtrefを求め(ステップS190)、転舵角制御部920に出力する。
転舵角θt及び目標転舵角θtrefを入力した転舵角制御部920は、減算部927にて目標転舵角θtrefから転舵角θtを減算することにより、偏差Δθt0を算出する(ステップS200)。偏差Δθt0は転舵角FB補償部921に入力され、転舵角FB補償部921は、偏差Δθt0に補償値を乗算することにより偏差Δθt0を補償し(ステップS210)、目標転舵角速度ωtrefを速度制御部923に出力する。転舵角速度演算部922は転舵角θtを入力し、転舵角θtに対する微分演算により転舵角速度ωttを算出し(ステップS220)、速度制御部923に出力する。速度制御部923は、速度制御部330と同様にI-P制御によりモータ電流指令値Imctaを算出し(ステップS230)、出力制限部926に出力する。出力制限部926は、予め設定された上限値及び下限値によりモータ電流指令値Imctaの上下限値を制限し(ステップS240)、モータ電流指令値Imctとして出力する(ステップS250)。
モータ電流指令値Imctは電流制御部930に入力され、電流制御部930は、モータ電流指令値Imct及びモータ電流検出器940で検出された駆動用モータ71の電流値Imdに基づいて、駆動用モータ71を駆動し、電流制御を実施する(ステップS260)。
なお、図39におけるデータ入力及び演算等の順番は適宜変更可能である。また、転舵角制御部920内の速度制御部923は、捩れ角制御部300a内の速度制御部330と同様に、I-P制御ではなく、PI制御、P制御、PID制御、PI-D制御等、実現可能で、P、I及びDのいずれかの制御を用いていれば良く、更に、転舵角制御部920及び捩れ角制御部300aでの追従制御は、一般的に用いられている制御構造で行っても良い。転舵角制御部920については、目標角度(ここでは目標転舵角θtref)に対して実角度(ここでは転舵角θt)が追従する制御構成であれば、車両用装置に用いられている制御構成に限定されず、例えば、産業用位置決め装置や産業用ロボット等に用いられている制御構成を適用しても良い。
実施形態3では、図35に示されるように、1つのECU50で反力装置60及び駆動装置70の制御を行っているが、反力装置60用のECUと駆動装置70用のECUをそれぞれ設けても良い。この場合、ECU同士は通信によりデータの送受信を行うことになる。また、図35に示されるSBWシステムは反力装置60と駆動装置70の間には機械的な結合を持たないが、システムに異常が発生した場合に、コラム軸2と転舵機構をクラッチ等で機械的に結合する機械的トルク伝達機構を備えるSBWシステムにも、本開示は適用可能である。このようなSBWシステムでは、システム正常時はクラッチをオフにして機械的トルク伝達を開放状態とし、システム異常時はクラッチをオンにして機械的トルク伝達を可能状態とする。
上述の実施形態1から3での捩れ角制御部300,300aは、直接的にモータ電流指令値Imc及びアシスト電流指令値Iacを演算しているが、それらを演算する前に、先ず出力したいモータトルク(目標トルク)を演算してから、モータ電流指令値及びアシスト電流指令値を演算するようにしても良い。この場合、モータトルクからモータ電流指令値及びアシスト電流指令値を求めるには、一般的に用いられている、モータ電流とモータトルクの関係を使用する。
図40は、実施形態3の低μ路トルク補正値演算部の一構成例を示すブロック図である。上述した実施形態1,2では、タイヤのスリップによって発生する物理量として、SAT推定部343(図3参照)によって推定されるセルフアライニングトルクTSAT、ヨーレートセンサ15(図1参照)によって検出される実ヨーレートγ、又は横加速度センサ16(図1参照)によって検出される実横加速度を用いる例について説明したが、本実施形態では、タイヤのスリップによって発生する物理量として、図40に示すように、転舵角制御部920(図36参照)にて算出されるモータ電流指令値Imctを用いる構成について説明する。
図40に示すように、実施形態3の低μ路トルク補正値演算部280dは、比例係数乗算部281dと、減算部282dと、トルク調整係数値マップ部283dと、絶対値演算部284dと、を含む。
絶対値演算部284dには、モータ電流指令値Imctが入力される。絶対値演算部284dは、入力されたモータ電流指令値Imctの絶対値|Imct|を演算する。比例係数乗算部281dは、入力されたモータ電流指令値の絶対値|Imct|に対して、所定の比例係数k”を乗じた値k”(|Imct|)を減算部282dに出力する。比例係数k”の値は、トルク信号Tref_a0と比例係数乗算部281dの出力値k”(|Imct|)とが通常の走行状態で略一致するような値に設定される。
減算部282dは、トルク信号Tref_a0から比例係数乗算部281dの出力値k”(|Imct|)を減算した値Tref_a0-k”(|Imct|)をトルク調整係数値マップ部283dに出力する。
トルク調整係数値マップ部283dは、減算部282dの出力値Tref_a0-k”(|Imct|)とトルク調整係数値Gとの関係を示すトルク調整係数値マップを保持している。実施形態3に係るトルク調整係数値マップの特性は、図14に示す実施形態1のトルク調整係数値マップ部283が保持するトルク調整係数値マップと同様であり、減算部282の出力値Tref_a0-k(|TSAT|)を減算部282dの出力値Tref_a0-k”(|Imct|)に読み替えることで対応可能である。
トルク調整係数値マップ部283dは、上述したトルク調整係数値マップを用いて、減算部282dの出力値Tref_a0-k”(|Imct|)に応じたトルク調整係数値Gを導出して出力する。なお、減算部282dの出力値Tref_a0-k”(|Imct|)とトルク調整係数値Gとの関係を示す数式を用いて、トルク調整係数値Gを算出する態様であっても良い。
図40に示す実施形態3の構成においても、上述した実施形態1,2に係る構成と同様に、タイヤのグリップ力が失われた状態において、トルク信号Tref_aを通常の走行状態(図15中の実線)よりも小さくすることができる(図15中の破線)。これにより、通常の走行状態よりも操舵感が軽くなり、運転者は、タイヤのグリップ力が失われたことを認識することができ、適切な緊急回避操作を行うことができる。
(変形例)
図41は、実施形態3の変形例の低μ路トルク補正値演算部の一構成例を示すブロック図である。なお、上述した実施形態3の構成と同じ構成部には同一の符号を付して重複する説明は省略する。
図41は、実施形態3の変形例の低μ路トルク補正値演算部の一構成例を示すブロック図である。なお、上述した実施形態3の構成と同じ構成部には同一の符号を付して重複する説明は省略する。
図41に示すように、低μ路トルク補正値演算部280eには、基本マップ部210から出力されるトルク信号Tref_a0、及び転舵角制御部920(図39参照)にて算出されるモータ電流指令値Imctに加え、車速Vsが入力される。
図41に示すように、実施形態3の変形例の低μ路トルク補正値演算部280eは、比例係数乗算部281eと、減算部282eと、トルク調整減算値マップ部283eと、絶対値演算部284eと、を含む。
絶対値演算部284eには、モータ電流指令値Imctが入力される。絶対値演算部284eは、入力されたモータ電流指令値Imctの絶対値|Imct|を演算する。比例係数乗算部281eは、入力されたモータ電流指令値の絶対値|Imct|に対して、所定の比例係数k”を乗じた値k”(|Imct|)を減算部282eに出力する。比例係数k”の値は、トルク信号Tref_a0と比例係数乗算部281eの出力値k”(|Imct|)とが通常の走行状態で略一致するような値に設定される。
減算部282eは、トルク信号Tref_a0から比例係数乗算部281eの出力値k”(|Imct|)を減算した値Tref_a0-k”(|Imct|)をトルク調整減算値マップ部283eに出力する。
トルク調整減算値マップ部283eは、減算部282eの出力値Tref_a0-k”(|Imct|)とトルク調整減算値Sと車速Vsとの関係を示すトルク調整減算値マップを保持している。実施形態3の変形例に係るトルク調整減算値マップの特性は、図24に示す実施形態1の変形例1のトルク調整減算値マップ部283aが保持するトルク調整減算値マップと同様であり、減算部282aの出力値Tref_a0-k(|TSAT|)を減算部282eの出力値Tref_a0-k”(|Imct|)に読み替えることで対応可能である。
トルク調整減算値マップ部283eは、上述したトルク調整減算値マップを用いて、減算部282eの出力値Tref_a0-k”(|Imct|)に応じたトルク調整減算値Sを導出して出力する。なお、減算部282eの出力値Tref_a0-k”(|Imct|)とトルク調整減算値Sと車速Vsとの関係を示す数式を用いて、トルク調整減算値Sを算出する態様であっても良い。
図41に示す実施形態3の変形例の構成においても、上述した実施形態1に係る構成と同様に、タイヤのグリップ力が失われた状態において、トルク信号Tref_aを通常の走行状態(図15中の実線)よりも小さくすることができる(図15中の破線)。これにより、通常の走行状態よりも操舵感が軽くなり、運転者は、タイヤのグリップ力が失われたことを認識することができ、適切な緊急回避操作を行うことができる。
なお、上述した実施形態3及びその変形例では、タイヤのスリップによって発生する物理量として、転舵角制御部920(図39参照)にて算出されるモータ電流指令値Imctを用いる構成を例示したが、本実施形態においても、実施形態1の変形例2,3と同様に、タイヤのスリップによって発生する物理量として、ヨーレートセンサ15(図1参照)によって検出される実ヨーレートγを用いる構成とすることも可能である。また、本実施形態においても、例えば、タイヤのスリップによって発生する物理量として、横加速度センサ16(図1参照)によって検出される実横加速度を用いる構成としても、上述した実施形態1,2と同様の効果を得ることができる。
さらには、上述した実施形態1において、タイヤのスリップによって発生する物理量として、捩れ角制御部300(図5参照)にて生成されるモータ電流指令値Irefを用いる構成としても良いし、上述した実施形態2において、タイヤのスリップによって発生する物理量として、捩れ角制御部300a(図25参照)により演算されたモータ電流指令値Imcを用いる構成としても良い。
なお、上述で使用した図は、本開示に関して定性的な説明を行うための概念図であり、これらに限定されるものではない。また、上述の実施形態は本開示の好適な実施の一例ではあるが、これに限定されるものではなく、本開示の要旨を逸脱しない範囲において種々変形実施可能である。また、ハンドルと、モータ又は反力モータの間に任意のバネ定数を有する機構であれば、トーションバーに限定しなくても良い。
1 ハンドル
2 コラム軸
2A トーションバー
3 減速機構
4a、4b ユニバーサルジョイント
5 ピニオンラック機構
6a,6b タイロッド
7a,7b ハブユニット
8L,8R 操向車輪
10 トルクセンサ
11 イグニションキー
12 車速センサ
13 バッテリ
14 舵角センサ
15 ヨーレートセンサ
16 横加速度センサ
20 モータ
30,50 コントロールユニット(ECU)
60 反力装置
61 反力用モータ
70 駆動装置
71 駆動用モータ
72 ギア
73 角度センサ
100 EPS操舵系/車両系
130 電流制御部
140 モータ電流検出器
200,200a,200b,200c,201,201a,202 目標操舵トルク生成部
210 基本マップ部
211 乗算部
212 減算部
213 符号抽出部
214 乗算部
220 微分部
230 ダンパゲインマップ部
240 ヒステリシス補正部
250 SAT情報補正部
251 SAT算出部
251A 換算部
251B 角速度演算部
251C 角加速度演算部
251D,251E,251F ブロック
251H ,251I,251J 加算器
252 フィルタ部
253 操舵トルク感応ゲイン部
254 車速感応ゲイン部
255 舵角感応ゲイン部
256 制限部
260 乗算部
261,262,263 加算部
280,280a,280b,280c,280d,280e 低μ路トルク補正値演算部
281,281a,281b,281c,281d,281e 比例係数乗算部
282,282a,282b,282c,282d,282e 減算部
283,283b,283d トルク調整係数値マップ部
283a,283c,283e トルク調整減算値マップ部
284,284a,284b,284c,284d,284e 絶対値演算部
300,300a 捩れ角制御部
310 捩れ角フィードバック(FB)補償部
320 捩れ角速度演算部
330 速度制御部
331 積分部
332 比例部
333,334 減算部
340 安定化補償部
350 出力制限部
360 舵角外乱補償部
361 減算部
362,363 加算部
370 減速比部
400 操舵方向判定部
500 変換部
910 目標転舵角生成部
920 転舵角制御部
921 転舵角フィードバック(FB)補償部
922 転舵角速度演算部
923 速度制御部
926 出力制限部
927 減算部
930 電流制御部
931 制限部
933 補正部
932 レート制限部
940 モータ電流検出器
1001 CPU
1005 インターフェース
1006 A/D変換器
1007 PWMコントローラ
1100 制御用コンピュータ(MCU)
2 コラム軸
2A トーションバー
3 減速機構
4a、4b ユニバーサルジョイント
5 ピニオンラック機構
6a,6b タイロッド
7a,7b ハブユニット
8L,8R 操向車輪
10 トルクセンサ
11 イグニションキー
12 車速センサ
13 バッテリ
14 舵角センサ
15 ヨーレートセンサ
16 横加速度センサ
20 モータ
30,50 コントロールユニット(ECU)
60 反力装置
61 反力用モータ
70 駆動装置
71 駆動用モータ
72 ギア
73 角度センサ
100 EPS操舵系/車両系
130 電流制御部
140 モータ電流検出器
200,200a,200b,200c,201,201a,202 目標操舵トルク生成部
210 基本マップ部
211 乗算部
212 減算部
213 符号抽出部
214 乗算部
220 微分部
230 ダンパゲインマップ部
240 ヒステリシス補正部
250 SAT情報補正部
251 SAT算出部
251A 換算部
251B 角速度演算部
251C 角加速度演算部
251D,251E,251F ブロック
251H ,251I,251J 加算器
252 フィルタ部
253 操舵トルク感応ゲイン部
254 車速感応ゲイン部
255 舵角感応ゲイン部
256 制限部
260 乗算部
261,262,263 加算部
280,280a,280b,280c,280d,280e 低μ路トルク補正値演算部
281,281a,281b,281c,281d,281e 比例係数乗算部
282,282a,282b,282c,282d,282e 減算部
283,283b,283d トルク調整係数値マップ部
283a,283c,283e トルク調整減算値マップ部
284,284a,284b,284c,284d,284e 絶対値演算部
300,300a 捩れ角制御部
310 捩れ角フィードバック(FB)補償部
320 捩れ角速度演算部
330 速度制御部
331 積分部
332 比例部
333,334 減算部
340 安定化補償部
350 出力制限部
360 舵角外乱補償部
361 減算部
362,363 加算部
370 減速比部
400 操舵方向判定部
500 変換部
910 目標転舵角生成部
920 転舵角制御部
921 転舵角フィードバック(FB)補償部
922 転舵角速度演算部
923 速度制御部
926 出力制限部
927 減算部
930 電流制御部
931 制限部
933 補正部
932 レート制限部
940 モータ電流検出器
1001 CPU
1005 インターフェース
1006 A/D変換器
1007 PWMコントローラ
1100 制御用コンピュータ(MCU)
Claims (10)
- 操舵力を補助するモータを駆動制御することにより、車両の操舵系をアシスト制御する車両用操向装置であって、
前記モータの目標操舵トルクを生成する目標操舵トルク生成部を備え、
前記目標操舵トルク生成部は、
操舵角及び車速に応じたトルク信号と、タイヤのスリップによって発生する物理量に所定の比例係数を乗じた値との差分値に応じた目標操舵トルクを生成する
車両用操向装置。 - 前記目標操舵トルク生成部は、
前記差分値に応じたトルク調整係数値を前記トルク信号に乗じて、前記目標操舵トルクを生成する
請求項1に記載の車両用操向装置。 - 前記目標操舵トルク生成部は、
前記差分値が大きいほど、前記トルク調整係数値を小さくする
請求項2に記載の車両用操向装置。 - 前記トルク調整係数値は1以下の正の値である
請求項2又は3に記載の車両用操向装置。 - 前記目標操舵トルク生成部は、
前記差分値に応じたトルク調整減算値を前記トルク信号から減じて、前記目標操舵トルクを生成する
請求項1に記載の車両用操向装置。 - 前記目標操舵トルク生成部は、
前記差分値が大きいほど、前記トルク調整減算値を大きくする
請求項5に記載の車両用操向装置。 - 前記トルク調整減算値は前記トルク信号よりも小さい
請求項5又は6に記載の車両用操向装置。 - 前記物理量はセルフアライニングトルクである
請求項1から7の何れか一項に記載の車両用操向装置。 - 前記物理量はヨーレートである
請求項1から7の何れか一項に記載の車両用操向装置。 - 前記物理量は前記モータの電流指令値である
請求項1から7の何れか一項に記載の車両用操向装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/422,322 US20220097760A1 (en) | 2019-02-19 | 2019-12-24 | Vehicle steering device |
| JP2021501641A JP7347493B2 (ja) | 2019-02-19 | 2019-12-24 | 車両用操向装置 |
| EP19915907.0A EP3929068B1 (en) | 2019-02-19 | 2019-12-24 | Vehicle steering device |
| CN201980092045.7A CN113474236B (zh) | 2019-02-19 | 2019-12-24 | 车辆用转向装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019027806 | 2019-02-19 | ||
| JP2019-027806 | 2019-02-19 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020170602A1 true WO2020170602A1 (ja) | 2020-08-27 |
Family
ID=72144314
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/050657 WO2020170602A1 (ja) | 2019-02-19 | 2019-12-24 | 車両用操向装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20220097760A1 (ja) |
| EP (1) | EP3929068B1 (ja) |
| JP (1) | JP7347493B2 (ja) |
| CN (1) | CN113474236B (ja) |
| WO (1) | WO2020170602A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019206980B4 (de) * | 2019-05-14 | 2023-06-22 | Volkswagen Aktiengesellschaft | Verfahren und Lenkungssteuergerät zum Ermitteln einer Stellgröße für das Einstellen eines Servolenkmoments bei einem Fahrzeuglenksystem |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1149000A (ja) * | 1997-08-01 | 1999-02-23 | Honda Motor Co Ltd | 電動パワーステアリング装置 |
| JP2002160653A (ja) * | 2000-11-24 | 2002-06-04 | Toyoda Mach Works Ltd | 電動パワーステアリング装置の制御装置 |
| JP2006281880A (ja) * | 2005-03-31 | 2006-10-19 | Showa Corp | 電動パワーステアリング装置 |
| JP2006315634A (ja) | 2005-05-16 | 2006-11-24 | Jtekt Corp | 車両用操舵装置 |
| JP2007314005A (ja) * | 2006-05-25 | 2007-12-06 | Nsk Ltd | 電動パワーステアリング装置の制御装置 |
| JP2011079395A (ja) * | 2009-10-06 | 2011-04-21 | Mitsubishi Electric Corp | アンダーステア検出装置及び検出方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002012160A (ja) * | 2000-06-29 | 2002-01-15 | Fuji Heavy Ind Ltd | 車両の路面摩擦係数推定装置 |
| JP4213545B2 (ja) * | 2003-09-05 | 2009-01-21 | 株式会社ジェイテクト | 車輪のグリップ度推定装置、及び該装置を備えた車両の運動制御装置 |
| JP2007168756A (ja) * | 2005-12-26 | 2007-07-05 | Showa Corp | 電動パワーステアリング装置 |
| JP2008081006A (ja) * | 2006-09-28 | 2008-04-10 | Mitsubishi Electric Corp | 車両用走行制御装置 |
| EP2022703B1 (en) * | 2007-08-10 | 2013-10-09 | NSK Ltd. | Vehicular steering angle estimating apparatus and electric power steering apparatus mounted therewith |
| JP5429142B2 (ja) * | 2010-11-18 | 2014-02-26 | 日本精工株式会社 | 電動パワーステアリング装置 |
| WO2014167629A1 (ja) * | 2013-04-08 | 2014-10-16 | 三菱電機株式会社 | 操舵制御装置および操舵制御方法 |
| EP3184402B1 (en) * | 2014-08-22 | 2020-04-15 | NSK Ltd. | Electric power steering device |
| JP6314752B2 (ja) * | 2014-08-28 | 2018-04-25 | 株式会社デンソー | 電動ステアリング制御装置 |
| JP6327198B2 (ja) * | 2015-04-30 | 2018-05-23 | 株式会社デンソー | 電動パワーステアリング制御装置 |
| JP6634878B2 (ja) * | 2016-02-26 | 2020-01-22 | 株式会社ジェイテクト | 操舵制御装置 |
-
2019
- 2019-12-24 US US17/422,322 patent/US20220097760A1/en active Pending
- 2019-12-24 JP JP2021501641A patent/JP7347493B2/ja active Active
- 2019-12-24 WO PCT/JP2019/050657 patent/WO2020170602A1/ja unknown
- 2019-12-24 EP EP19915907.0A patent/EP3929068B1/en active Active
- 2019-12-24 CN CN201980092045.7A patent/CN113474236B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1149000A (ja) * | 1997-08-01 | 1999-02-23 | Honda Motor Co Ltd | 電動パワーステアリング装置 |
| JP2002160653A (ja) * | 2000-11-24 | 2002-06-04 | Toyoda Mach Works Ltd | 電動パワーステアリング装置の制御装置 |
| JP2006281880A (ja) * | 2005-03-31 | 2006-10-19 | Showa Corp | 電動パワーステアリング装置 |
| JP2006315634A (ja) | 2005-05-16 | 2006-11-24 | Jtekt Corp | 車両用操舵装置 |
| JP2007314005A (ja) * | 2006-05-25 | 2007-12-06 | Nsk Ltd | 電動パワーステアリング装置の制御装置 |
| JP2011079395A (ja) * | 2009-10-06 | 2011-04-21 | Mitsubishi Electric Corp | アンダーステア検出装置及び検出方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3929068A1 (en) | 2021-12-29 |
| JP7347493B2 (ja) | 2023-09-20 |
| US20220097760A1 (en) | 2022-03-31 |
| CN113474236B (zh) | 2024-01-12 |
| EP3929068B1 (en) | 2024-05-15 |
| JPWO2020170602A1 (ja) | 2021-12-16 |
| CN113474236A (zh) | 2021-10-01 |
| EP3929068A4 (en) | 2022-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3321149B1 (en) | Electric power steering device | |
| US10160482B2 (en) | Driving support control apparatus using electric power steering mechanism | |
| JP4779495B2 (ja) | 車両用操舵装置 | |
| US9446789B2 (en) | Electric power steering apparatus | |
| EP3459822B1 (en) | Control device for electric power steering device | |
| EP2977296B1 (en) | Electric power steering device | |
| EP3031701B1 (en) | Electric power steering device | |
| WO2020115973A1 (ja) | 車両用操向装置 | |
| US11964713B2 (en) | Vehicle steering device | |
| US12084122B2 (en) | Steering apparatus for vehicles | |
| WO2020012689A1 (ja) | 車両用操向装置 | |
| WO2020100411A1 (ja) | 車両用操向装置 | |
| JP3676543B2 (ja) | 電動パワーステアリング装置 | |
| WO2019167661A1 (ja) | 車両用操向装置 | |
| JP7482130B2 (ja) | 車両用操向装置 | |
| JP2020185819A (ja) | 車両用操向装置 | |
| WO2020170602A1 (ja) | 車両用操向装置 | |
| JP7222309B2 (ja) | 車両用操向装置 | |
| WO2020213285A1 (ja) | 車両用操向装置 | |
| JP2006168481A (ja) | 車両用操舵制御装置およびその転舵角制御方法 | |
| JP2021147018A (ja) | 車両用操向装置 | |
| JP2021160638A (ja) | 車両用操向装置 | |
| JP7268488B2 (ja) | 車両用操向装置 | |
| WO2020183838A1 (ja) | 車両用操向装置 | |
| JP2982594B2 (ja) | 車両用実舵角制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19915907 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021501641 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019915907 Country of ref document: EP Effective date: 20210920 |