WO2020026856A1 - 撮像装置および電子機器 - Google Patents
撮像装置および電子機器 Download PDFInfo
- Publication number
- WO2020026856A1 WO2020026856A1 PCT/JP2019/028494 JP2019028494W WO2020026856A1 WO 2020026856 A1 WO2020026856 A1 WO 2020026856A1 JP 2019028494 W JP2019028494 W JP 2019028494W WO 2020026856 A1 WO2020026856 A1 WO 2020026856A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- trench gate
- unit
- imaging device
- photoelectric conversion
- transfer destination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images
























Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/80—Constructional details of image sensors
- H10F39/802—Geometry or disposition of elements in pixels, e.g. address-lines or gate electrodes
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/80—Constructional details of image sensors
- H10F39/803—Pixels having integrated switching, control, storage or amplification elements
- H10F39/8037—Pixels having integrated switching, control, storage or amplification elements the integrated elements comprising a transistor
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/54—Mounting of pick-up tubes, electronic image sensors, deviation or focusing coils
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/50—Control of the SSIS exposure
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/76—Addressed sensors, e.g. MOS or CMOS sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/76—Addressed sensors, e.g. MOS or CMOS sensors
- H04N25/779—Circuitry for scanning or addressing the pixel array
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/011—Manufacture or treatment of image sensors covered by group H10F39/12
- H10F39/014—Manufacture or treatment of image sensors covered by group H10F39/12 of CMOS image sensors
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/10—Integrated devices
- H10F39/12—Image sensors
- H10F39/199—Back-illuminated image sensors
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/80—Constructional details of image sensors
- H10F39/803—Pixels having integrated switching, control, storage or amplification elements
- H10F39/8037—Pixels having integrated switching, control, storage or amplification elements the integrated elements comprising a transistor
- H10F39/80373—Pixels having integrated switching, control, storage or amplification elements the integrated elements comprising a transistor characterised by the gate of the transistor
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/80—Constructional details of image sensors
- H10F39/812—Arrangements for transferring the charges in the image sensor perpendicular to the imaging plane, e.g. buried regions used to transfer generated charges to circuitry under the photosensitive region
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/10—Integrated devices
- H10F39/12—Image sensors
- H10F39/18—Complementary metal-oxide-semiconductor [CMOS] image sensors; Photodiode array image sensors
Definitions
- the present disclosure relates to an imaging device that performs imaging by performing photoelectric conversion and an electronic apparatus including the imaging device.
- An imaging device includes a semiconductor layer including a front surface, a back surface opposite to the front surface, and a photoelectric conversion buried in the semiconductor layer and generating a charge according to a received light amount by photoelectric conversion. And a first trench gate and a second trench gate extending from the front surface to the back surface of the semiconductor layer to the photoelectric conversion unit, respectively, and charge is transferred from the photoelectric conversion unit to the first trench gate and the second trench gate. And a transfer unit for transferring to the same transfer destination via the respective trench gates.
- the first trench gate has a first length from the surface to the photoelectric conversion unit, and the second trench gate has a second length shorter than the first length from the surface to the photoelectric conversion unit.
- the imaging device and the electronic apparatus as one embodiment of the present disclosure, electric charges are smoothly transferred from the photoelectric conversion unit to the transfer destination, and excellent imaging performance can be realized.
- the effect of the present disclosure is not limited to this, and may be any of the effects described below.
- FIG. 2 is a block diagram illustrating a configuration example of a function of the imaging device according to the first embodiment of the present disclosure.
- FIG. 9 is a block diagram illustrating a configuration example of functions of an imaging device as a first modification of the first embodiment.
- FIG. 14 is a block diagram illustrating a configuration example of functions of an imaging device as a second modification of the first embodiment.
- FIG. 1B is a circuit diagram illustrating a circuit configuration of one sensor pixel in the imaging device illustrated in FIG. 1A.
- FIG. 1B is a plan view schematically showing a configuration of some sensor pixels in the imaging device shown in FIG. 1A.
- 3A and 3B are a cross-sectional view schematically illustrating a configuration of some sensor pixels in the imaging device illustrated in FIG.
- FIG. 9 is a plan view illustrating a sensor pixel according to a second embodiment of the present disclosure.
- FIG. 9B is a circuit diagram illustrating a circuit configuration of the sensor pixel illustrated in FIG. 9A.
- FIG. 13 is a plan view illustrating a sensor pixel according to a third embodiment of the present disclosure.
- FIG. 10B is a circuit diagram illustrating a circuit configuration of the sensor pixel illustrated in FIG. 10A.
- FIG. 13 is a plan view illustrating a sensor pixel according to a fourth embodiment of the present disclosure.
- FIG. 11B is a circuit diagram illustrating a circuit configuration of the sensor pixel illustrated in FIG. 11A.
- FIG. 11B is a cross-sectional view schematically illustrating a configuration of the sensor pixel illustrated in FIG. 11A.
- 11B is a first time chart illustrating the waveform of each drive signal of the sensor pixel illustrated in FIG. 11A.
- FIG. 12B is a second time chart illustrating a waveform of each drive signal of the sensor pixel illustrated in FIG. 11A.
- 11B is a third time chart illustrating the waveform of each drive signal of the sensor pixel illustrated in FIG. 11A. It is a top view showing the sensor pixel as a 1st modification of a 4th embodiment. It is a top view showing the sensor pixel as a 2nd modification of a 4th embodiment. It is a top view showing the sensor pixel as a 3rd modification of a 4th embodiment. It is a top view showing the sensor pixel as a 4th modification of a 4th embodiment.
- FIG. 2 is a schematic diagram illustrating an example of the overall configuration of an electronic device.
- FIG. 3 is a block diagram illustrating an example of a functional configuration of a camera head and a CCU.
- First Embodiment An example of a solid-state imaging device in which one vertical transistor in a transfer unit has two trench gates having different depths. 2. Modification 3 of the first embodiment.
- Second Embodiment An example of a solid-state imaging device further including a power supply as a charge transfer destination and a discharge transistor. 4.
- Third Embodiment An example of a solid-state imaging device further including a charge holding unit. 5.
- Fourth Embodiment An example of a solid-state imaging device in which a transfer unit has two vertical transistors that can be driven independently of each other. 6. Modification 7 of the fourth embodiment 7. 7. Application example to electronic equipment Application example 9 to moving object Example of application to endoscopic surgery system 10. Other modifications
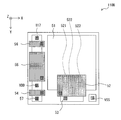
- FIG. 1A is a block diagram illustrating a configuration example of a function of the solid-state imaging device 101A according to the first embodiment of the present technology.
- the solid-state imaging device 101A is a so-called global shutter type back-illuminated image sensor such as a CMOS (Complementary Metal Oxide Semiconductor) image sensor.
- the solid-state imaging device 101A captures an image by receiving light from a subject, photoelectrically converting the light, and generating an image signal.
- CMOS Complementary Metal Oxide Semiconductor
- the global shutter method is a method of performing global exposure in which exposure is basically started simultaneously for all pixels and exposure is completed for all pixels simultaneously.
- all pixels are all pixels in a portion appearing in an image, and a dummy pixel or the like is excluded.
- a method of moving the global exposure area while performing global exposure in units of a plurality of rows (for example, several tens of rows) instead of all pixels simultaneously may be used. It is included in the global shutter system.
- the global shutter method also includes a method in which global exposure is performed on pixels in a predetermined area instead of all of the pixels in a portion appearing in an image.
- a back-illuminated image sensor is a photoelectric conversion unit such as a photodiode that receives light from a subject and converts it into an electric signal.
- a light-receiving surface on which light from the subject is incident and wiring such as a transistor that drives each pixel. Refers to an image sensor having a structure provided between the wiring layer and the wiring layer provided with.
- the solid-state imaging device 101A includes, for example, a pixel array unit 111, a vertical drive unit 112, a column signal processing unit 113, a data storage unit 119, a horizontal drive unit 114, a system control unit 115, and a signal processing unit 118.
- the pixel array unit 111 is formed on the semiconductor layer 11 (described later). Peripheral circuits such as the vertical drive unit 112, the column signal processing unit 113, the data storage unit 119, the horizontal drive unit 114, the system control unit 115, and the signal processing unit 118 are, for example, on the same semiconductor layer 11 as the pixel array unit 111. It is formed.
- the pixel array unit 111 has a plurality of sensor pixels 110 including the photoelectric conversion unit 51 (described later) that generates and accumulates charges according to the amount of light incident from the subject. As shown in FIG. 1, the sensor pixels 110 are arranged in the horizontal direction (row direction) and the vertical direction (column direction). In the pixel array section 111, for each pixel row including the sensor pixels 110 arranged in one row in the row direction, a pixel driving line 116 is wired along the row direction, and is made up of the sensor pixels 110 arranged in one column in the column direction. For each pixel column, a vertical signal line (VSL) 117 is wired along the column direction.
- VSL vertical signal line
- the vertical drive unit 112 includes a shift register, an address decoder, and the like.
- the vertical drive unit 112 supplies all of the plurality of sensor pixels 110 in the pixel array unit 111 simultaneously by supplying signals and the like to the plurality of sensor pixels 110 via the plurality of pixel drive lines 116, or Drive by row.
- the vertical drive unit 112 has two scanning systems, for example, a reading scanning system and a sweeping scanning system.
- the readout scanning system selectively scans the unit pixels of the pixel array unit 111 in row units in order to read out signals from the unit pixels.
- the sweep-out scanning system performs a sweep-out scan on the readout row on which the readout scan is performed by the readout scan system ahead of the readout scan by a time corresponding to the shutter speed.
- Unnecessary charges are swept out from the photoelectric conversion units 51 of the unit pixels in the readout row by the sweeping scan by the sweeping scanning system. This is called a reset. Then, a so-called electronic shutter operation is performed by sweeping out unnecessary charges by the sweep-out scanning system, that is, by resetting.
- the electronic shutter operation refers to an operation of discarding the photoelectric charge of the photoelectric conversion unit 51 and newly starting exposure, that is, an operation of newly starting accumulation of the photoelectric charge.
- the signal read out by the readout operation by the readout scanning system corresponds to the amount of light incident after the immediately preceding readout operation or the electronic shutter operation.
- the period from the read timing by the immediately preceding read operation or the sweep timing by the electronic shutter operation to the read timing by the current read operation is the photocharge accumulation time in the unit pixel, that is, the exposure time.
- the signal output from each unit pixel of the pixel row selectively scanned by the vertical driving unit 112 is supplied to the column signal processing unit 113 through each of the vertical signal lines 117.
- the column signal processing unit 113 performs predetermined signal processing on a signal output from each unit pixel of the selected row through the vertical signal line 117 for each pixel column of the pixel array unit 111, and performs pixel processing after the signal processing. Is temporarily held.
- the column signal processing unit 113 includes, for example, a shift register and an address decoder, and performs noise removal processing, correlated double sampling processing, A / D (Analog / Digital) conversion A / D conversion processing of analog pixel signals. And so on to generate a digital pixel signal.
- the column signal processing unit 113 supplies the generated pixel signal to the signal processing unit 118.
- the horizontal drive unit 114 is configured by a shift register, an address decoder, and the like, and sequentially selects unit circuits corresponding to the pixel columns of the column signal processing unit 113. By the selective scanning by the horizontal driving unit 114, the pixel signals subjected to the signal processing for each unit circuit in the column signal processing unit 113 are sequentially output to the signal processing unit 118.
- the system control unit 115 includes a timing generator that generates various timing signals.
- the system control unit 115 controls the driving of the vertical driving unit 112, the column signal processing unit 113, and the horizontal driving unit 114 based on the timing signal generated by the timing generator.
- the signal processing unit 118 performs signal processing such as arithmetic processing on the pixel signals supplied from the column signal processing unit 113 while temporarily storing data in the data storage unit 119 as necessary, and performs processing for each pixel signal. Is output.
- the data storage section 119 temporarily stores data necessary for the signal processing in the signal processing in the signal processing section 118.
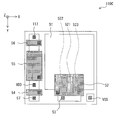
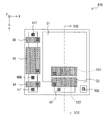
- FIG. 1B is a block diagram illustrating a configuration example of functions of a solid-state imaging device 101B as a first modification example according to the first embodiment of the present technology.
- FIG. 1C is a block diagram illustrating a configuration example of a function of a solid-state imaging device 101C as a second modification example according to the first embodiment of the present technology.
- a data storage unit 119 is disposed between the column signal processing unit 113 and the horizontal driving unit 114, and a pixel signal output from the column signal processing unit 113 stores data in the data storage unit 119.
- the signal is supplied to the signal processing unit 118 via the control unit.
- a data storage unit 119 and a signal processing unit 118 are arranged in parallel between the column signal processing unit 113 and the horizontal driving unit 114.
- the column signal processing unit 113 performs A / D conversion for converting an analog pixel signal into a digital pixel signal for each column of the pixel array unit 111 or for each of a plurality of columns of the pixel array unit 111. I have.
- FIG. 2 illustrates an example of a circuit configuration of one sensor pixel 110 of the plurality of sensor pixels 110 included in the pixel array unit 111.
- the sensor pixels 110 in the pixel array unit 111 include a photoelectric conversion unit (PD) 51, a transfer transistor (TG) 52, a charge-voltage conversion unit (FD) 53, a reset transistor (RST) 54, and an amplification.
- a transistor (AMP) 55 and a selection transistor (SEL) 56 are included.
- TG 52, RST 54, AMP 55, and SEL 56 are all N-type MOS transistors.
- Drive signals S52, S54 and S56 are supplied to the respective gate electrodes of the TG 52, RST 54, AMP 55 and SEL 56 by the vertical drive unit 112 and the horizontal drive unit 114 based on the drive control of the system control unit 115, respectively.
- the drive signals S52, S54, and S56 are pulse signals in which a high-level state becomes an active state (ON state) and a low-level state becomes an inactive state (OFF state).
- bringing the drive signal into the active state is also referred to as turning on the drive signal
- bringing the drive signal into the inactive state is also referred to as turning off the drive signal.
- the PD 51 is a photoelectric conversion element composed of, for example, a photodiode of a PN junction, and is configured to receive light from a subject, generate a charge corresponding to the amount of received light by photoelectric conversion, and accumulate the charge.
- the TG 52 is connected between the PD 51 and the FD 53, and is configured to transfer charges accumulated in the PD 51 to the FD 53 in accordance with a drive signal S52 applied to the gate electrode of the TG 52.
- the TG 52 is a specific example corresponding to the “transfer unit” of the present disclosure.
- the RST 54 has a drain connected to the power supply VDD and a source connected to the FD 53.
- the RST 54 initializes, that is, resets, the FD 53 according to the drive signal S54 applied to the gate electrode. For example, when the drive signal S58 turns on and the RST 58 turns on, the potential of the FD 53 is reset to the voltage level of the power supply VDD. That is, the FD 53 is initialized.
- the FD 53 is a floating diffusion region that converts the electric charge transferred from the PD 51 via the TG 52 into an electric signal (for example, a voltage signal) and outputs the electric signal.
- the FD 53 is connected to the RST 54 and the vertical signal line VSL via the AMP 55 and the SEL 56.
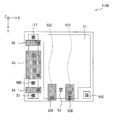
- FIG. 3 illustrates an example of a planar configuration of one sensor pixel 110 of the plurality of sensor pixels 110 included in the pixel array unit 111.
- FIG. 4A shows an example of a cross-sectional configuration of one sensor pixel 110, which corresponds to a cross-section taken along the line IV-IV shown in FIG.
- an XZ section along the X-axis direction is shown between a position P1 and a position P2, and the other is an YZ section along the Y-axis direction.
- the PD 51 occupies the central area of the sensor pixel 110, and RST 54, VDD, AMP 55, SEL 56, FD 57, VSS and VSL 117 are provided in the peripheral area. ing.
- the TG 52 and the FD 53 are provided at positions overlapping the PD 51 in the Z-axis direction (also referred to as a thickness direction or a depth direction).
- the FD 57 is connected to the FD 53 by a metal layer.
- VSS is a ground terminal, which is normally set to 0V.
- the sensor pixel 110 includes a semiconductor layer 11 formed of a semiconductor material such as Si (silicon), a PD 51, and a TG 52 as a transfer unit. . Further, an insulating layer 13 made of an oxide or the like is provided between the TG 52, the semiconductor layer 11, and the PD 51.
- the semiconductor layer 11 includes a front surface 11S1 and a back surface 11S2 opposite to the front surface 11S1.
- the semiconductor layer 11 may be provided with a light shielding portion 12 so as to surround the PD 51.
- TG 52 includes a trench gate 521 and a trench gate 522.
- the TG 52 transfers the charge generated and accumulated in the PD 51 from the PD 51 to the same transfer destination, that is, the FD 53 via the trench gate 521 and the trench gate 522, respectively.
- the trench gate 521 and the trench gate 522 extend from the front surface 11S1 of the semiconductor layer 11 to the back surface 11S2 to the PD 51, respectively.
- the trench gate 521 has a length L521 from the surface 11S1 to the PD 51.
- the trench gate 522 has a length L522 shorter than the length L521 from the surface 11S1 to the PD 51 (L521> L522).
- the diameter D521 of the trench gate 521 and the diameter D522 of the trench gate 522 are smaller as going from the front surface 11S1 to the back surface 11S2. Further, the maximum value of the diameter D521 of the trench gate 521 is larger than the maximum value of the diameter D522 of the trench gate 522. In the example shown in FIG. 4A, the diameter D521 of the trench gate 521 and the diameter D522 of the trench gate 522 are both maximum at the uppermost part.
- the sensor pixel 110 turns on the drive signal S52 to the TG 52 based on the drive control of the system control unit 115 when reading out the charge generated and accumulated in the PD 51 that has received light from the subject. As a result, the charge accumulated in the PD 51 is transferred from the PD 51 to the FD 53 via the trench gate 521 and the trench gate 522.
- the potential in the depth direction (Z-axis direction) of the PD 51 gradually increases from a deeper position, that is, a position closer to the back surface 11S2, to a shallower position, that is, a position closer to the front surface 11S1. have.
- a potential dip may occur in a part of the PD 51 in the depth direction.
- a potential dip is a location having a lower potential compared to the potential immediately above and below it.
- the potential gradient in the depth direction becomes gentle, and a potential dip tends to occur.
- the potential state in the thickness direction (Z-axis direction) of the PD 51 is, for example, the state shown in FIG. 4B.
- FIG. 4B is a schematic diagram illustrating a potential state in the depth direction (Z-axis direction) of the PD 51 when it is assumed that the TG 52 has only one trench gate 521.
- the TG 52 has the relatively long trench gate 521 and the relatively short trench gate 522.
- the potential of the PD 51 increases the modulating force received from the TG 52. Will be done.
- the potential state in the thickness direction (Z-axis direction) of the PD 51 becomes, for example, the state shown in FIG. 4C, and the potential dip existing in a part of the depth direction is eliminated.
- FIG. 4C is a schematic diagram illustrating a potential state in the depth direction (Z-axis direction) of the PD 51, and corresponds to the cross section of FIG.
- the TG 52 that transfers charges from the PD 51 includes the trench gate 521 having the length L521 and the trench gate 522 having the length L522 shorter than the length L521. And so on. For this reason, even if an unintended potential dip exists in the PD 51 while the TG 52 is off or an unintended potential dip is generated in the PD 51 for the purpose of increasing the saturation charge, the TG 52 is turned on. In the state described above, the potential dip can be eliminated.
- each of the diameter D521 of the trench gate 521 and the diameter D522 of the trench gate 522 becomes thinner from the front surface 11S1 to the back surface 11S2. Further, the maximum value of the diameter D521 of the trench gate 521 is larger than the maximum value of the diameter D522 of the trench gate 522. Therefore, the structure is advantageous for accurately forming the trench gate 521 having the larger length L521 and the trench gate 522 having the length L522 shorter than the length L521.
- FIG. 5 is a plan view illustrating a sensor pixel 110A as a third modification of the first embodiment.
- FIG. 5 corresponds to FIG. 3 of the first embodiment.
- the sensor pixel 110A according to the present modification is configured such that the FD 53 that is the charge transfer destination is located between the trench gate 521 and the trench gate 522. Except for this point, the other configuration is substantially the same as that of the sensor pixel 110 according to the first embodiment.
- the FD 53 that is the transfer destination is located between the trench gate 521 and the trench gate 522 as compared with the sensor pixel 110 according to the first embodiment. It is arranged.
- the back bias effect is eliminated in the portion between the trench gate 521 and the trench gate 522, and the modulation force received from the TG 52 becomes the highest. Therefore, the transferred charge is necessarily transferred to the surface 11S1 through the space between the trench gate 521 and the trench gate 522.
- the presence of the FD 53, which is the transfer destination of the charge, near the surface 11S improves the transfer efficiency of the charge from the PD 51 to the FD 53.
- FIG. 6 is a plan view illustrating a sensor pixel 110B as a fourth modification of the first embodiment.
- FIG. 6 corresponds to FIG. 3 of the first embodiment.
- the sensor pixel 110B is such that the TG 52 further includes a trench gate 523 as a third trench gate in addition to the trench gate 521 and the trench gate 522. .
- Each of the trench gates 521 to 523 has a substantially square cross section along the XY plane. Further, in the XY plane, the distance between the trench gate 522 and the FD 53 that is the transfer destination is shorter than the distance between the trench gate 521 and the FD 53 and shorter than the distance between the trench gate 523 and the FD 53. Except for these points, the other configuration is substantially the same as that of the sensor pixel 110 according to the first embodiment.
- the trench gate 523 is further provided, so that the number of the trench gates is larger than that of the sensor pixel 110. For this reason, a modulating force can be exerted on the potential of a region of the PD 51 located further away from the TG 52 in the horizontal plane (XY plane). As a result, charge transfer from the PD 51 to the FD 53 can be performed more smoothly.
- FIG. 7 is a plan view illustrating a sensor pixel 110C as a fifth modification of the first embodiment.
- FIG. 7 corresponds to FIG. 3 of the first embodiment.
- the sensor pixel 110C is such that the TG 52 further includes a trench gate 523 as a third trench gate in addition to the trench gate 521 and the trench gate 522. .
- Each of the trench gates 521 to 523 has a substantially square cross section along the XY plane. Further, in the XY plane, the distance between the trench gate 521 and the FD 53 that is the transfer destination is longer than the distance between the trench gate 522 and the FD 53 and longer than the distance between the trench gate 523 and the FD 53. Except for these points, the other configuration is substantially the same as that of the sensor pixel 110 according to the first embodiment.
- the trench gate 523 is further provided, so that the number of the trench gates is larger than that of the sensor pixel 110. For this reason, a modulating force can be exerted on the potential of a region of the PD 51 located further away from the TG 52 in the horizontal plane (XY plane). As a result, charge transfer from the PD 51 to the FD 53 can be performed more smoothly.
- two of the three trench gates are arranged in the vicinity of the FD 53 that is the charge transfer destination. Therefore, compared with the sensor pixel 110B as the fourth modification of the first embodiment shown in FIG.
- the charge of the PD 51 can be more efficiently transferred to the FD 53. This is because a favorable transfer path that can transfer the charge of the PD 51 more efficiently, that is, a region portion sandwiched between the trench gate 522 and the trench gate 523 is arranged near the FD 53.
- FIG. 8 is a plan view illustrating a sensor pixel 110D as a sixth modification of the first embodiment.
- FIG. 8 corresponds to FIG. 3 of the first embodiment.
- each of the trench gates 521 and 522 has a substantially square cross section along the XY plane. Except for this point, the other configuration is substantially the same as that of the sensor pixel 110 according to the first embodiment.
- FIG. 9A illustrates a planar configuration example of the sensor pixel 210 according to the second embodiment of the present technology.
- FIG. 9B shows a circuit configuration example of the sensor pixel 210.
- VDD2 is further provided in addition to the FD53 as a charge transfer destination of the PD51, and a discharge transistor (OFG) 58 is further provided between the PD51 and VDD2. . Except for these points, the other configuration is substantially the same as that of the sensor pixel 110 according to the first embodiment.
- the OFG 58 has a drain connected to the power supply VDD2 and a source connected to a wiring connecting the TG 52 and the PD 51.
- the OFG 58 initializes, that is, resets the PD 51 according to the drive signal S58 applied to the gate electrode. Resetting the PD 51 means that the PD 51 is depleted.
- the OFG 58 forms an overflow path between the TG 52 and the power supply VDD2, and discharges the charge overflowing from the PD 51 to the power supply VDD2. As described above, in the sensor pixel 210 of the present embodiment, the OFG 58 can directly reset the PD 51, and an FD holding global shutter can be realized.
- a plurality of trench gates having different depths that is, a trench gate 581 and a trench gate 582 are provided also in the OFG 58.
- the length of the trench gate 581 and the length of the trench gate 582 are different.
- the transfer failure at the time of discharging the charges overflowing from the PD 51 to the power supply VDD2. Can be prevented.
- FIG. 10A illustrates a planar configuration example of a sensor pixel 310 according to the third embodiment of the present technology.
- FIG. 10B shows a circuit configuration example of the sensor pixel 310.
- the sensor pixel 310 of the present embodiment is such that a charge holding unit (MEM) 59 is further provided between the PD 51 and the FD 53. Accordingly, a first transfer transistor (TG) 52A and a second transfer transistor (TG) 52B are provided instead of the TG 52.
- the TG 52A is arranged between the PD 51 and the MEM 59, and the TG 52B is arranged between the MEM 59 and the FD 53. Except for these points, the other configuration is substantially the same as that of the sensor pixel 210 according to the second embodiment.
- the charge from the PD 51 is transferred to the MEM 59, and a memory-holding global shutter can be realized.
- the drive signal S52A applied to the gate electrode of the TG 52A is turned on, and when the TG 52A is turned on, the charge accumulated in the PD 51 is transferred to the MEM 59 via the TG 52A.
- the MEM 59 is an area for temporarily holding the charge accumulated in the PD 51 in order to realize the global shutter function.
- the TG 52B transfers the electric charge held in the MEM 59 to the FD 53 in accordance with the drive signal S52B applied to the gate electrode of the TG 52B.
- the drive signal S52 when the drive signal S52 is turned off, the TG 52A is turned off, the drive signal S52B is turned on, and the TG 52B is turned on, the electric charge held in the MEM 59 is transferred to the FD 53 via the TG 52B.
- MEM 59 has trench gates 591 and 592 having different depths. For this reason, a transfer failure at the time of transferring the charge in the PD 51 to the MEM 59 can be prevented.
- FIG. 11A illustrates a planar configuration example of a sensor pixel 410 according to the fourth embodiment of the present technology.
- FIG. 11B shows an example of a circuit configuration of the sensor pixel 410.
- FIG. 11C shows a cross-sectional configuration example of the sensor pixel 410.
- the transfer unit is configured so that the first transfer transistor (TG) 52A and the second transfer transistor (TG) can be driven independently of each other.
- TG 52A includes trench gate TG 521
- TG 52B includes trench gate TG 522. Except for these points, the other configuration is substantially the same as that of the sensor pixel 110 according to the first embodiment. Therefore, in the sensor pixel 410, similarly to the sensor pixel 110, the length L522 of the trench gate 522 is shorter than the length L521 of the trench gate 521 (L521> L522).
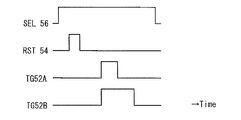
- the TG 52A and the TG 52B can be driven independently, so that the ON / OFF driving timing of the TG 52A and the ON / OFF driving timing of the TG 52B can be freely selected. Therefore, as shown in FIG. 12A, for example, after the TG 52A and the TG 52B are simultaneously activated, that is, simultaneously from the off state to the on state, the TG 52A is lowered before the TG 52B (from the on state to the off state). )be able to.
- the modulating force that the potential of the PD 51 receives from the TG 52 increases along the Z-axis direction from the back surface 11S2 to the front surface 11S1.
- the potential dip in the PD 51 is more effectively eliminated as compared with the case in which one TG 52 is provided with two trench gates TG 521 and TG 522 as in the sensor pixel 110 according to the first embodiment. can do.
- the ON / OFF drive timing of the TG 52A and the ON / OFF drive timing of the TG 52B are not limited to the case shown in FIG. 12A, and may be, for example, as shown in FIG. 12B.
- FIG. 12B shows an example in which the TG 52A is activated before the TG 52B and the TG 52A is activated before the TG 52B. That is, in the sensor pixel 410 of the present embodiment, the on-state period in the TG 52A and the on-state period in the TG 52B may partially overlap, and the TG 52A may fall before the TG 52B. Alternatively, as shown in FIG.
- the timing to complete the fall of TG 52A is the time when the fall of TG 52B is completed. It suffices that it comes before the timing to perform. That is, by changing the gradient of the speed of switching from the ON state to the OFF state, the timing of the completion of the switching from the ON state to the OFF state in the TG 52B is later than the timing of the completion of the switching from the ON state to the OFF state in the TG 52A. You may. The rounding of the pulse shown in FIG.
- FIGS. 12A to 12C are time charts showing the waveforms of the respective drive signals supplied to the RST 54, SEL 56, TG 52A and TG 52B.
- FIG. 13A is a plan view illustrating a sensor pixel 410A as a first modification of the fourth embodiment.
- FIG. 13A corresponds to FIG. 11A of the fourth embodiment.
- the sensor pixel 410A according to this modification has the FD 53 that is the transfer destination of the electric charge positioned between the trench gate 521 and the trench gate 522. Except for this point, the other configuration is substantially the same as that of the sensor pixel 410 according to the fourth embodiment.
- the FD 53 that is the transfer destination is located between the trench gate 521 and the trench gate 522, as compared with the sensor pixel 410 according to the fourth embodiment. It is arranged.
- the back bias effect is eliminated in the portion between the trench gate 521 and the trench gate 522, and the modulation force received from the TG 52A and TG 52B becomes the highest. Therefore, the transferred charge is necessarily transferred to the surface 11S1 through the space between the trench gate 521 and the trench gate 522.
- the presence of the FD 53, which is the transfer destination of the charge, near the surface 11S improves the transfer efficiency of the charge from the PD 51 to the FD 53.
- FIG. 13B is a plan view illustrating a sensor pixel 410B as a second modification of the fourth embodiment.
- FIG. 13B corresponds to FIG. 11A of the fourth embodiment.
- the TG 52A includes both the trench gate 521 and the trench gate 522.
- the TG 52B does not have a trench gate, and is located between the TG 52A and the FD 53 to which the charge is transferred. Except for this point, the other configuration is substantially the same as that of the sensor pixel 410 according to the fourth embodiment.
- FIG. 13C is a plan view illustrating a sensor pixel 410C as a third modification of the fourth embodiment.
- FIG. 13C corresponds to FIG. 11A of the fourth embodiment.
- the sensor pixel 410C according to the present modification further includes, as a transfer unit, a TG 52C that can be driven independently of the TG 52A and the TG 52B.
- TG 52A includes a trench gate 521
- TG 52B includes a trench gate 522
- TG 52C includes a trench gate 523.
- the other configuration is substantially the same as that of the sensor pixel 410 according to the fourth embodiment.
- the TG 52C is further provided, so that the charge transfer from the PD 51 in the horizontal plane (the XY plane) is performed more smoothly than in the sensor pixel 410. be able to. Therefore, for example, the saturation signal amount of the PD 51 can be easily increased.
- FIG. 13D is a plan view illustrating a sensor pixel 410D as a fourth modification of the fourth embodiment.
- FIG. 13D corresponds to FIG. 11A of the fourth embodiment.
- the TG 52C does not have a trench gate. Except for this point, the other configuration is substantially the same as that of the sensor pixel 410C as the third modified example of the fourth embodiment.
- FIG. 14 is a block diagram illustrating a configuration example of a camera 2000 as an electronic device to which the present technology is applied.
- the camera 2000 is an optical unit 2001 including a lens group, an imaging device (imaging device) 2002 to which the above-described solid-state imaging device 101 or the like (hereinafter, referred to as the solid-state imaging device 101 or the like) is applied, and a camera signal processing circuit.
- a DSP (Digital Signal Processor) circuit 2003 is provided.
- the camera 2000 also includes a frame memory 2004, a display unit 2005, a recording unit 2006, an operation unit 2007, and a power supply unit 2008.
- the DSP circuit 2003, the frame memory 2004, the display unit 2005, the recording unit 2006, the operation unit 2007, and the power supply unit 2008 are interconnected via a bus line 2009.
- the optical unit 2001 captures incident light (image light) from a subject and forms an image on the imaging surface of the imaging device 2002.
- the imaging device 2002 converts the amount of incident light formed on the imaging surface by the optical unit 2001 into an electric signal in pixel units and outputs the electric signal as a pixel signal.
- the display unit 2005 includes, for example, a panel-type display device such as a liquid crystal panel or an organic EL panel, and displays a moving image or a still image captured by the imaging device 2002.
- the recording unit 2006 records a moving image or a still image captured by the imaging device 2002 on a recording medium such as a hard disk or a semiconductor memory.
- the operation unit 2007 issues operation commands for various functions of the camera 2000 under user operation.
- the power supply unit 2008 appropriately supplies various power supplies serving as operation power supplies for the DSP circuit 2003, the frame memory 2004, the display unit 2005, the recording unit 2006, and the operation unit 2007 to these supply targets.
- the technology (the present technology) according to the present disclosure can be applied to various products.
- the technology according to the present disclosure is realized as a device mounted on any type of moving object such as an automobile, an electric vehicle, a hybrid electric vehicle, a motorcycle, a bicycle, a personal mobility, an airplane, a drone, a ship, and a robot. You may.
- FIG. 15 is a block diagram illustrating a schematic configuration example of a vehicle control system that is an example of a mobile object control system to which the technology according to the present disclosure can be applied.
- Vehicle control system 12000 includes a plurality of electronic control units connected via communication network 12001.
- the vehicle control system 12000 includes a drive system control unit 12010, a body system control unit 12020, an outside information detection unit 12030, an inside information detection unit 12040, and an integrated control unit 12050.
- a microcomputer 12051 As a functional configuration of the integrated control unit 12050, a microcomputer 12051, a sound image output unit 12052, a vehicle-mounted network I / F (Interface) 120 53 is shown.
- the drive system control unit 12010 controls the operation of the device related to the drive system of the vehicle according to various programs.
- the drive system control unit 12010 includes a drive force generation device for generating a drive force of the vehicle such as an internal combustion engine or a drive motor, a drive force transmission mechanism for transmitting the drive force to the wheels, and a steering angle of the vehicle. It functions as a control mechanism such as a steering mechanism that adjusts and a braking device that generates a braking force of the vehicle.
- the body control unit 12020 controls the operation of various devices mounted on the vehicle body according to various programs.
- the body-related control unit 12020 functions as a keyless entry system, a smart key system, a power window device, or a control device for various lamps such as a head lamp, a back lamp, a brake lamp, a blinker, and a fog lamp.
- a radio wave or a signal of various switches transmitted from a portable device replacing the key can be input to the body control unit 12020.
- the body control unit 12020 receives the input of these radio waves or signals, and controls a door lock device, a power window device, a lamp, and the like of the vehicle.
- Out-of-vehicle information detection unit 12030 detects information external to the vehicle on which vehicle control system 12000 is mounted.
- an imaging unit 12031 is connected to the outside-of-vehicle information detection unit 12030.
- the out-of-vehicle information detection unit 12030 causes the imaging unit 12031 to capture an image outside the vehicle, and receives the captured image.
- the out-of-vehicle information detection unit 12030 may perform an object detection process or a distance detection process of a person, a vehicle, an obstacle, a sign, a character on a road surface, or the like based on the received image.
- the imaging unit 12031 is an optical sensor that receives light and outputs an electric signal according to the amount of received light.
- the imaging unit 12031 can output an electric signal as an image or can output the information as distance measurement information.
- the light received by the imaging unit 12031 may be visible light or non-visible light such as infrared light.
- the in-vehicle information detection unit 12040 detects information in the vehicle.
- the in-vehicle information detection unit 12040 is connected to, for example, a driver status detection unit 12041 that detects the status of the driver.
- the driver state detection unit 12041 includes, for example, a camera that captures an image of the driver, and the in-vehicle information detection unit 12040 determines the degree of driver fatigue or concentration based on the detection information input from the driver state detection unit 12041. The calculation may be performed, or it may be determined whether the driver has fallen asleep.
- the microcomputer 12051 calculates a control target value of the driving force generation device, the steering mechanism or the braking device based on the information on the inside and outside of the vehicle acquired by the outside information detection unit 12030 or the inside information detection unit 12040, and the drive system control unit A control command can be output to 12010.
- the microcomputer 12051 implements an ADAS (Advanced Driver Assistance System) function including a vehicle collision avoidance or impact mitigation, a following operation based on an inter-vehicle distance, a vehicle speed maintaining operation, a vehicle collision warning, or a vehicle lane departure warning. Cooperative control for the purpose.
- ADAS Advanced Driver Assistance System
- the microcomputer 12051 controls the driving force generation device, the steering mechanism, the braking device, and the like based on the information on the surroundings of the vehicle acquired by the outside information detection unit 12030 or the inside information detection unit 12040, and thereby, It is possible to perform cooperative control for automatic driving or the like in which the vehicle travels autonomously without depending on the operation.
- the microcomputer 12051 can output a control command to the body system control unit 12020 based on information on the outside of the vehicle acquired by the outside information detection unit 12030.
- the microcomputer 12051 controls the headlamp according to the position of the preceding vehicle or the oncoming vehicle detected by the outside information detection unit 12030, and performs cooperative control for the purpose of preventing glare such as switching a high beam to a low beam. It can be carried out.
- the sound image output unit 12052 transmits at least one of a sound signal and an image signal to an output device capable of visually or audibly notifying a passenger of the vehicle or the outside of the vehicle of information.
- an audio speaker 12061, a display unit 12062, and an instrument panel 12063 are illustrated as output devices.
- the display unit 12062 may include, for example, at least one of an on-board display and a head-up display.
- FIG. 16 is a diagram illustrating an example of an installation position of the imaging unit 12031.
- the imaging unit 12031 includes imaging units 12101, 12102, 12103, 12104, and 12105.
- the imaging units 12101, 12102, 12103, 12104, and 12105 are provided, for example, at positions such as a front nose, a side mirror, a rear bumper, a back door, and an upper part of a windshield in the vehicle interior of the vehicle 12100.
- the imaging unit 12101 provided on the front nose and the imaging unit 12105 provided above the windshield in the passenger compartment mainly acquire an image in front of the vehicle 12100.
- the imaging units 12102 and 12103 provided in the side mirror mainly acquire images of the side of the vehicle 12100.
- the imaging unit 12104 provided in the rear bumper or the back door mainly acquires an image behind the vehicle 12100.
- the imaging unit 12105 provided above the windshield in the passenger compartment is mainly used for detecting a preceding vehicle, a pedestrian, an obstacle, a traffic light, a traffic sign, a lane, and the like.
- FIG. 22 shows an example of the imaging range of the imaging units 12101 to 12104.
- the imaging range 12111 indicates the imaging range of the imaging unit 12101 provided on the front nose
- the imaging ranges 12112 and 12113 indicate the imaging ranges of the imaging units 12102 and 12103 provided on the side mirrors, respectively
- the imaging range 12114 indicates 14 shows an imaging range of an imaging unit 12104 provided in a rear bumper or a back door. For example, by overlaying image data captured by the imaging units 12101 to 12104, an overhead image of the vehicle 12100 viewed from above can be obtained.
- At least one of the imaging units 12101 to 12104 may have a function of acquiring distance information.
- at least one of the imaging units 12101 to 12104 may be a stereo camera including a plurality of imaging elements or an imaging element having pixels for detecting a phase difference.
- the microcomputer 12051 calculates a distance to each three-dimensional object in the imaging ranges 12111 to 12114 and a temporal change of the distance (relative speed with respect to the vehicle 12100).
- a distance to each three-dimensional object in the imaging ranges 12111 to 12114 and a temporal change of the distance (relative speed with respect to the vehicle 12100).
- microcomputer 12051 can set an inter-vehicle distance to be secured before the preceding vehicle and perform automatic brake control (including follow-up stop control), automatic acceleration control (including follow-up start control), and the like. In this way, it is possible to perform cooperative control for automatic driving or the like in which the vehicle travels autonomously without depending on the operation of the driver.
- the microcomputer 12051 converts the three-dimensional object data relating to the three-dimensional object into other three-dimensional objects such as a motorcycle, a normal vehicle, a large vehicle, a pedestrian, a telephone pole, and the like based on the distance information obtained from the imaging units 12101 to 12104. It can be classified and extracted and used for automatic avoidance of obstacles. For example, the microcomputer 12051 distinguishes obstacles around the vehicle 12100 into obstacles that are visible to the driver of the vehicle 12100 and obstacles that are difficult to see. Then, the microcomputer 12051 determines a collision risk indicating a risk of collision with each obstacle, and when the collision risk is equal to or more than the set value and there is a possibility of collision, via the audio speaker 12061 or the display unit 12062. By outputting an alarm to the driver through forced driving and avoidance steering via the drive system control unit 12010, driving assistance for collision avoidance can be performed.
- driving assistance for collision avoidance can be performed.
- At least one of the imaging units 12101 to 12104 may be an infrared camera that detects infrared light.
- the microcomputer 12051 can recognize a pedestrian by determining whether or not a pedestrian exists in the captured images of the imaging units 12101 to 12104. The recognition of such a pedestrian is performed by, for example, extracting a feature point in an image captured by the imaging units 12101 to 12104 as an infrared camera, and performing a pattern matching process on a series of feature points indicating the outline of the object to determine whether the object is a pedestrian.
- the audio image output unit 12052 outputs a rectangular outline to the recognized pedestrian for emphasis.
- the display unit 12062 is controlled so that is superimposed.
- the sound image output unit 12052 may control the display unit 12062 to display an icon or the like indicating a pedestrian at a desired position.
- the technology according to the present disclosure can be applied to the imaging unit 12031 among the configurations described above.
- the solid-state imaging device 101A or the like illustrated in FIG. 1 or the like can be applied to the imaging unit 12031.
- Example of application to endoscopic surgery system The technology (the present technology) according to the present disclosure can be applied to various products.
- the technology according to the present disclosure may be applied to an endoscopic surgery system.
- FIG. 17 is a diagram illustrating an example of a schematic configuration of an endoscopic surgery system to which the technology (the present technology) according to the present disclosure may be applied.
- FIG. 17 shows a situation in which an operator (doctor) 11131 is performing an operation on a patient 11132 on a patient bed 11133 using the endoscopic surgery system 11000.
- the endoscopic surgery system 11000 includes an endoscope 11100, other surgical tools 11110 such as an insufflation tube 11111 and an energy treatment tool 11112, and a support arm device 11120 that supports the endoscope 11100.
- a cart 11200 on which various devices for endoscopic surgery are mounted.
- the endoscope 11100 includes a lens barrel 11101 having a predetermined length from the distal end inserted into the body cavity of the patient 11132, and a camera head 11102 connected to the proximal end of the lens barrel 11101.
- the endoscope 11100 which is configured as a so-called rigid endoscope having a hard lens barrel 11101 is illustrated.
- the endoscope 11100 may be configured as a so-called flexible endoscope having a soft lens barrel. Good.
- An opening in which an objective lens is fitted is provided at the tip of the lens barrel 11101.
- a light source device 11203 is connected to the endoscope 11100, and light generated by the light source device 11203 is guided to the distal end of the lens barrel by a light guide that extends inside the lens barrel 11101, and the objective The light is radiated toward the observation target in the body cavity of the patient 11132 via the lens.
- the endoscope 11100 may be a direct view scope, a perspective view scope, or a side view scope.
- An optical system and an image sensor are provided inside the camera head 11102, and the reflected light (observation light) from the observation target is focused on the image sensor by the optical system.
- the observation light is photoelectrically converted by the imaging element, and an electric signal corresponding to the observation light, that is, an image signal corresponding to the observation image is generated.
- the image signal is transmitted to a camera control unit (CCU: ⁇ Camera ⁇ Control ⁇ Unit) 11201 as RAW data.
- the $ CCU 11201 is configured by a CPU (Central Processing Unit), a GPU (Graphics Processing Unit), and the like, and controls the operations of the endoscope 11100 and the display device 11202 overall. Further, the CCU 11201 receives an image signal from the camera head 11102, and performs various image processing on the image signal for displaying an image based on the image signal, such as a development process (demosaicing process).
- a development process demosaicing process
- the display device 11202 displays an image based on an image signal on which image processing has been performed by the CCU 11201 under the control of the CCU 11201.
- the light source device 11203 includes a light source such as an LED (Light Emitting Diode), for example, and supplies the endoscope 11100 with irradiation light when imaging an operation part or the like.
- a light source such as an LED (Light Emitting Diode), for example, and supplies the endoscope 11100 with irradiation light when imaging an operation part or the like.
- the input device 11204 is an input interface for the endoscopic surgery system 11000.
- the user can input various information and input instructions to the endoscopic surgery system 11000 via the input device 11204.
- the user inputs an instruction or the like to change imaging conditions (type of irradiation light, magnification, focal length, and the like) by the endoscope 11100.
- the treatment instrument control device 11205 controls the driving of the energy treatment instrument 11112 for cauterizing, incising a tissue, sealing a blood vessel, and the like.
- the insufflation device 11206 is used to inflate the body cavity of the patient 11132 for the purpose of securing the visual field by the endoscope 11100 and securing the working space of the operator.
- the recorder 11207 is a device that can record various types of information related to surgery.
- the printer 11208 is a device capable of printing various types of information on surgery in various formats such as text, images, and graphs.
- the light source device 11203 that supplies the endoscope 11100 with irradiation light at the time of imaging the operation site can be configured by, for example, a white light source including an LED, a laser light source, or a combination thereof.
- a white light source is configured by a combination of the RGB laser light sources
- the output intensity and output timing of each color (each wavelength) can be controlled with high accuracy, so that the light source device 11203 adjusts the white balance of the captured image. It can be carried out.
- the laser light from each of the RGB laser light sources is radiated to the observation target in a time-division manner, and the driving of the image pickup device of the camera head 11102 is controlled in synchronization with the irradiation timing. It is also possible to capture the image obtained in a time-division manner. According to this method, a color image can be obtained without providing a color filter in the image sensor.
- the driving of the light source device 11203 may be controlled so as to change the intensity of output light at predetermined time intervals.
- the driving of the image sensor of the camera head 11102 in synchronization with the timing of the change of the light intensity, an image is acquired in a time-division manner, and the image is synthesized, so that a high dynamic image without so-called blackout and whiteout is obtained. An image of the range can be generated.
- the light source device 11203 may be configured to be able to supply light in a predetermined wavelength band corresponding to special light observation.
- the special light observation for example, the wavelength dependence of light absorption in body tissue is used to irradiate light of a narrower band compared to irradiation light (ie, white light) at the time of normal observation, so that the surface of the mucous membrane is exposed.
- a so-called narrow-band light observation (Narrow / Band / Imaging) for imaging a predetermined tissue such as a blood vessel with high contrast is performed.
- fluorescence observation in which an image is obtained by fluorescence generated by irradiating excitation light may be performed.
- body tissue is irradiated with excitation light to observe fluorescence from the body tissue (autofluorescence observation), or a reagent such as indocyanine green (ICG) is locally injected into the body tissue and Irradiation with excitation light corresponding to the fluorescence wavelength of the reagent can be performed to obtain a fluorescence image.
- the light source device 11203 can be configured to be able to supply narrowband light and / or excitation light corresponding to such special light observation.
- FIG. 18 is a block diagram showing an example of a functional configuration of the camera head 11102 and the CCU 11201 shown in FIG.
- the camera head 11102 includes a lens unit 11401, an imaging unit 11402, a driving unit 11403, a communication unit 11404, and a camera head control unit 11405.
- the CCU 11201 includes a communication unit 11411, an image processing unit 11412, and a control unit 11413.
- the camera head 11102 and the CCU 11201 are communicably connected to each other by a transmission cable 11400.
- the lens unit 11401 is an optical system provided at a connection with the lens barrel 11101. Observation light taken in from the tip of the lens barrel 11101 is guided to the camera head 11102, and enters the lens unit 11401.
- the lens unit 11401 is configured by combining a plurality of lenses including a zoom lens and a focus lens.
- the imaging unit 11402 includes an imaging element.
- the number of imaging elements constituting the imaging unit 11402 may be one (so-called single-panel type) or plural (so-called multi-panel type).
- an image signal corresponding to each of RGB may be generated by each imaging element, and a color image may be obtained by combining the image signals.
- the imaging unit 11402 may be configured to include a pair of imaging elements for acquiring right-eye and left-eye image signals corresponding to 3D (Dimensional) display. By performing the 3D display, the operator 11131 can more accurately grasp the depth of the living tissue in the operative part.
- a plurality of lens units 11401 may be provided for each imaging element.
- the imaging unit 11402 does not necessarily have to be provided in the camera head 11102.
- the imaging unit 11402 may be provided inside the lens barrel 11101 immediately after the objective lens.
- the drive unit 11403 is configured by an actuator, and moves the zoom lens and the focus lens of the lens unit 11401 by a predetermined distance along the optical axis under the control of the camera head control unit 11405.
- the magnification and the focus of the image captured by the imaging unit 11402 can be appropriately adjusted.
- the communication unit 11404 is configured by a communication device for transmitting and receiving various information to and from the CCU 11201.
- the communication unit 11404 transmits the image signal obtained from the imaging unit 11402 as RAW data to the CCU 11201 via the transmission cable 11400.
- the communication unit 11404 receives a control signal for controlling driving of the camera head 11102 from the CCU 11201 and supplies the control signal to the camera head control unit 11405.
- the control signal includes, for example, information indicating that the frame rate of the captured image is specified, information that specifies the exposure value at the time of imaging, and / or information that specifies the magnification and focus of the captured image. Contains information about the condition.
- imaging conditions such as the frame rate, the exposure value, the magnification, and the focus may be appropriately designated by the user, or may be automatically set by the control unit 11413 of the CCU 11201 based on the acquired image signal. Good.
- a so-called AE (Auto Exposure) function, an AF (Auto Focus) function, and an AWB (Auto White Balance) function are mounted on the endoscope 11100.
- the camera head control unit 11405 controls the driving of the camera head 11102 based on the control signal from the CCU 11201 received via the communication unit 11404.
- the communication unit 11411 is configured by a communication device for transmitting and receiving various information to and from the camera head 11102.
- the communication unit 11411 receives an image signal transmitted from the camera head 11102 via the transmission cable 11400.
- the communication unit 11411 transmits a control signal for controlling driving of the camera head 11102 to the camera head 11102.
- the image signal and the control signal can be transmitted by electric communication, optical communication, or the like.
- the image processing unit 11412 performs various types of image processing on an image signal that is RAW data transmitted from the camera head 11102.
- the control unit 11413 performs various kinds of control related to imaging of the operation section and the like by the endoscope 11100 and display of a captured image obtained by imaging the operation section and the like. For example, the control unit 11413 generates a control signal for controlling driving of the camera head 11102.
- control unit 11413 causes the display device 11202 to display a captured image showing the operative part or the like based on the image signal subjected to the image processing by the image processing unit 11412.
- the control unit 11413 may recognize various objects in the captured image using various image recognition techniques. For example, the control unit 11413 detects a shape, a color, or the like of an edge of an object included in the captured image, and thereby detects a surgical tool such as forceps, a specific living body site, bleeding, a mist when using the energy treatment tool 11112, and the like. Can be recognized.
- the control unit 11413 may use the recognition result to superimpose and display various types of surgery support information on the image of the operative site.
- the burden on the operator 11131 can be reduced, and the operator 11131 can reliably perform the operation.
- the transmission cable 11400 connecting the camera head 11102 and the CCU 11201 is an electric signal cable corresponding to electric signal communication, an optical fiber corresponding to optical communication, or a composite cable thereof.
- the communication is performed by wire using the transmission cable 11400, but the communication between the camera head 11102 and the CCU 11201 may be performed wirelessly.
- the technology according to the present disclosure may be applied to (the image processing unit 11412 of) the CCU 11201 among the configurations described above.
- the solid-state imaging device 101A in FIG. 1A can be applied to the imaging unit 10402.
- the endoscopic surgery system has been described as an example, but the technology according to the present disclosure may be applied to, for example, a microscopic surgery system or the like.
- a global shutter type backside illumination type image sensor has been described as an example, but the imaging device of the present disclosure is not limited to this, and may be another type of image sensor. . That is, the present disclosure is not limited to the global shutter type image sensor, but is also applicable to a rolling shutter type image sensor. Furthermore, the present disclosure is not limited to a backside illumination type image sensor, but is also applicable to a frontside illumination type image sensor. Further, the technology of the present disclosure is not limited to application to a CMOS image sensor, but is applicable to all XY address type solid-state imaging devices in which unit pixels are two-dimensionally arranged in a matrix.
- the imaging apparatus is not limited to an imaging apparatus that detects a light amount distribution of visible light and obtains an image, and obtains, as an image, a distribution of an incident amount of infrared rays, X-rays, or particles. It may be an imaging device.
- the imaging device of the present disclosure may be in the form of a module in which an imaging unit and a signal processing unit or an optical system are packaged together.
- the sensor pixel having two or three transfer transistors separated from each other as a transfer unit is illustrated, but the imaging device according to the present disclosure may have four or more transfer transistors as a transfer unit. It may be.
- a semiconductor layer including a front surface and a back surface opposite to the front surface, Embedded in the semiconductor layer, a photoelectric conversion unit that generates a charge according to the amount of received light by photoelectric conversion, A first trench gate and a second trench gate each extending from the front surface of the semiconductor layer toward the back surface to the photoelectric conversion unit, wherein the charge is transferred from the photoelectric conversion unit to the first trench gate.
- a transfer unit for transferring to the same transfer destination via the gate and the second trench gate, respectively.
- the first trench gate has a first length from the surface to the photoelectric conversion unit
- the imaging device, wherein the second trench gate has a second length shorter than the first length from the surface to the photoelectric conversion unit.
- the imaging device according to (1), wherein the transfer destination is a charge-voltage converter.
- the imaging device according to (1), wherein the transfer destination is a charge holding unit.
- the imaging device according to (1), wherein the transfer destination is a power supply.
- the imaging device according to (1), wherein the transfer destination is located between the first trench gate and the second trench gate.
- (6) In a plane parallel to the surface, The imaging device according to any one of (1) to (5), wherein a distance between the second trench gate and the transfer destination is shorter than a distance between the first trench gate and the transfer destination.
- the imaging device includes a first transistor and a second transistor configured to be independently drivable.
- the first transistor includes the first trench gate;
- the first transistor includes the first trench gate and the second trench gate;
- the imaging device according to (7), wherein the second transistor is located between the first transistor and the transfer destination.
- the transfer unit has one transistor, The one transistor includes the first trench gate, the second trench gate, and a third trench gate, In a plane parallel to the surface, a second distance between the second trench gate and the transfer destination is shorter than a first distance between the first trench gate and the transfer destination; The third distance between the trench gate and the transfer destination is shorter than the first distance.
- the transfer unit has one transistor, The one transistor includes the first trench gate, the second trench gate, and a third trench gate, In a plane parallel to the surface, a second distance between the second trench gate and the transfer destination is shorter than a first distance between the first trench gate and the transfer destination; The third distance between the trench gate and the transfer destination is longer than the second distance.
- An electronic device including an imaging device, The imaging device, A semiconductor layer including a front surface and a back surface opposite to the front surface, Embedded in the semiconductor layer, a photoelectric conversion unit that generates a charge according to the amount of received light by photoelectric conversion, A first trench gate and a second trench gate each extending from the front surface of the semiconductor layer toward the back surface to the photoelectric conversion unit, wherein the charge is transferred from the photoelectric conversion unit to the first trench gate.
- a transfer unit for transferring to the same transfer destination via the gate and the second trench gate, respectively.
- the first trench gate has a first length from the surface to the photoelectric conversion unit
- the electronic device, wherein the second trench gate has a second length shorter than the first length from the surface to the photoelectric conversion unit.
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Solid State Image Pick-Up Elements (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
Priority Applications (12)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020533431A JP7341141B2 (ja) | 2018-07-31 | 2019-07-19 | 撮像装置および電子機器 |
| EP19843503.4A EP3832726B1 (en) | 2018-07-31 | 2019-07-19 | Imaging device and electronic apparatus |
| KR1020217001608A KR102679749B1 (ko) | 2018-07-31 | 2019-07-19 | 촬상 장치 및 전자 기기 |
| EP24218082.6A EP4503642A3 (en) | 2018-07-31 | 2019-07-19 | Imaging device and electronic apparatus |
| DE112019003845.1T DE112019003845T5 (de) | 2018-07-31 | 2019-07-19 | Bildaufnahmevorrichtung und elektronisches gerät |
| EP23187934.7A EP4246990B1 (en) | 2018-07-31 | 2019-07-19 | Imaging device and electronic apparatus |
| US17/261,059 US11482550B2 (en) | 2018-07-31 | 2019-07-19 | Imaging device and electronic apparatus |
| CN201980049688.3A CN112534579B (zh) | 2018-07-31 | 2019-07-19 | 摄像装置和电子设备 |
| US17/882,307 US11923387B2 (en) | 2018-07-31 | 2022-08-05 | Imaging device and electronic apparatus |
| JP2023133344A JP7615246B2 (ja) | 2018-07-31 | 2023-08-18 | 撮像装置および電子機器 |
| US18/372,431 US12230654B2 (en) | 2018-07-31 | 2023-09-25 | Imaging device and electronic apparatus |
| US18/954,017 US20250081646A1 (en) | 2018-07-31 | 2024-11-20 | Imaging device and electronic apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018143491 | 2018-07-31 | ||
| JP2018-143491 | 2018-07-31 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/261,059 A-371-Of-International US11482550B2 (en) | 2018-07-31 | 2019-07-19 | Imaging device and electronic apparatus |
| US17/882,307 Continuation US11923387B2 (en) | 2018-07-31 | 2022-08-05 | Imaging device and electronic apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020026856A1 true WO2020026856A1 (ja) | 2020-02-06 |
Family
ID=69231737
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/028494 Ceased WO2020026856A1 (ja) | 2018-07-31 | 2019-07-19 | 撮像装置および電子機器 |
Country Status (8)
| Country | Link |
|---|---|
| US (4) | US11482550B2 (https=) |
| EP (3) | EP3832726B1 (https=) |
| JP (2) | JP7341141B2 (https=) |
| KR (1) | KR102679749B1 (https=) |
| CN (1) | CN112534579B (https=) |
| DE (1) | DE112019003845T5 (https=) |
| TW (1) | TWI840384B (https=) |
| WO (1) | WO2020026856A1 (https=) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113053929A (zh) * | 2020-04-20 | 2021-06-29 | 台湾积体电路制造股份有限公司 | 半导体结构、影像感测器和半导体结构的形成方法 |
| WO2021235101A1 (ja) * | 2020-05-20 | 2021-11-25 | ソニーセミコンダクタソリューションズ株式会社 | 固体撮像装置 |
| WO2023199642A1 (ja) * | 2022-04-15 | 2023-10-19 | ソニーセミコンダクタソリューションズ株式会社 | 光検出装置及び電子機器 |
| WO2024202511A1 (ja) * | 2023-03-31 | 2024-10-03 | ソニーセミコンダクタソリューションズ株式会社 | 光検出装置及び電子機器 |
| WO2024232316A1 (ja) * | 2023-05-10 | 2024-11-14 | ソニーセミコンダクタソリューションズ株式会社 | 半導体装置 |
| WO2025084362A1 (ja) * | 2023-10-17 | 2025-04-24 | ソニーセミコンダクタソリューションズ株式会社 | 光検出装置及び電子機器 |
| WO2025197384A1 (ja) * | 2024-03-18 | 2025-09-25 | ソニーセミコンダクタソリューションズ株式会社 | 光検出装置及び電子機器 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI840384B (zh) * | 2018-07-31 | 2024-05-01 | 日商索尼半導體解決方案公司 | 攝像裝置及電子機器 |
| JP2020035916A (ja) * | 2018-08-30 | 2020-03-05 | ソニーセミコンダクタソリューションズ株式会社 | 撮像装置および電子機器 |
| US11948965B2 (en) * | 2021-04-01 | 2024-04-02 | Omnivision Technologies, Inc. | Uneven-trench pixel cell and fabrication method |
| TW202433740A (zh) * | 2023-01-20 | 2024-08-16 | 日商索尼半導體解決方案公司 | 半導體裝置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013084785A (ja) | 2011-10-11 | 2013-05-09 | Sony Corp | 固体撮像装置、撮像装置 |
| JP2015053411A (ja) * | 2013-09-09 | 2015-03-19 | ソニー株式会社 | 固体撮像素子、固体撮像素子の製造方法、および電子機器 |
| JP2015082592A (ja) * | 2013-10-23 | 2015-04-27 | ソニー株式会社 | 固体撮像素子およびその製造方法、並びに電子機器 |
| JP2016136584A (ja) * | 2015-01-23 | 2016-07-28 | 株式会社東芝 | 固体撮像装置および固体撮像装置の製造方法 |
| WO2017183477A1 (ja) * | 2016-04-22 | 2017-10-26 | ソニー株式会社 | 固体撮像素子および駆動方法、並びに電子機器 |
| JP2018143491A (ja) | 2017-03-06 | 2018-09-20 | 株式会社サンセイアールアンドディ | 遊技機 |
| WO2018198486A1 (ja) * | 2017-04-28 | 2018-11-01 | ソニーセミコンダクタソリューションズ株式会社 | 固体撮像素子および電子機器 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3792628B2 (ja) * | 2002-09-02 | 2006-07-05 | 富士通株式会社 | 固体撮像装置及び画像読み出し方法 |
| WO2008123597A2 (en) * | 2007-03-30 | 2008-10-16 | Panasonic Electric Works Co., Ltd. | Ccd image pickup device with twofold frame storage portion and method for using the device |
| US8009215B2 (en) * | 2008-07-16 | 2011-08-30 | International Business Machines Corporation | Pixel sensor cell with frame storage capability |
| JP2011159756A (ja) * | 2010-01-29 | 2011-08-18 | Sony Corp | 固体撮像装置とその製造方法、及び電子機器 |
| US9363451B2 (en) * | 2011-12-19 | 2016-06-07 | Sony Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| JP5573978B2 (ja) * | 2012-02-09 | 2014-08-20 | 株式会社デンソー | 固体撮像素子およびその駆動方法 |
| US9659981B2 (en) * | 2012-04-25 | 2017-05-23 | Taiwan Semiconductor Manufacturing Co., Ltd. | Backside illuminated image sensor with negatively charged layer |
| KR20140111492A (ko) * | 2013-03-11 | 2014-09-19 | 삼성전자주식회사 | 반도체 장치 |
| US11322533B2 (en) * | 2013-03-14 | 2022-05-03 | Sony Semiconductor Solutions Corporation | Solid state image sensor tolerant to misalignment and having a high photoelectric conversion efficiency |
| KR102255183B1 (ko) * | 2014-02-21 | 2021-05-24 | 삼성전자주식회사 | 수직형 트랜지스터를 갖는 씨모스 이미지 센서 및 그 제조 방법 |
| US9245974B2 (en) * | 2014-02-24 | 2016-01-26 | Taiwan Semiconductor Manufacturing Co., Ltd. | Performance boost by silicon epitaxy |
| JP2016009755A (ja) * | 2014-06-24 | 2016-01-18 | キヤノン株式会社 | 固体撮像装置及びその駆動方法 |
| JP2016018980A (ja) * | 2014-07-11 | 2016-02-01 | ソニー株式会社 | 固体撮像装置、製造方法、および電子機器 |
| KR20160021473A (ko) | 2014-08-18 | 2016-02-26 | 삼성전자주식회사 | 글로벌 셔터 이미지 센서와 이를 포함하는 이미지 처리 시스템 |
| JP2017055050A (ja) * | 2015-09-11 | 2017-03-16 | 株式会社東芝 | 固体撮像装置および固体撮像装置の製造方法 |
| JP2017183563A (ja) | 2016-03-31 | 2017-10-05 | ソニー株式会社 | 撮像装置、駆動方法、および、電子機器 |
| FR3052296A1 (fr) * | 2016-06-06 | 2017-12-08 | St Microelectronics Crolles 2 Sas | Capteur d'image de type a obturation globale |
| FR3052297A1 (fr) * | 2016-06-06 | 2017-12-08 | St Microelectronics Crolles 2 Sas | Capteur d'image de type a obturation globale |
| TWI840384B (zh) * | 2018-07-31 | 2024-05-01 | 日商索尼半導體解決方案公司 | 攝像裝置及電子機器 |
-
2019
- 2019-07-12 TW TW108124609A patent/TWI840384B/zh active
- 2019-07-19 WO PCT/JP2019/028494 patent/WO2020026856A1/ja not_active Ceased
- 2019-07-19 EP EP19843503.4A patent/EP3832726B1/en active Active
- 2019-07-19 JP JP2020533431A patent/JP7341141B2/ja active Active
- 2019-07-19 KR KR1020217001608A patent/KR102679749B1/ko active Active
- 2019-07-19 DE DE112019003845.1T patent/DE112019003845T5/de active Pending
- 2019-07-19 EP EP23187934.7A patent/EP4246990B1/en active Active
- 2019-07-19 EP EP24218082.6A patent/EP4503642A3/en active Pending
- 2019-07-19 CN CN201980049688.3A patent/CN112534579B/zh active Active
- 2019-07-19 US US17/261,059 patent/US11482550B2/en active Active
-
2022
- 2022-08-05 US US17/882,307 patent/US11923387B2/en active Active
-
2023
- 2023-08-18 JP JP2023133344A patent/JP7615246B2/ja active Active
- 2023-09-25 US US18/372,431 patent/US12230654B2/en active Active
-
2024
- 2024-11-20 US US18/954,017 patent/US20250081646A1/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013084785A (ja) | 2011-10-11 | 2013-05-09 | Sony Corp | 固体撮像装置、撮像装置 |
| JP2015053411A (ja) * | 2013-09-09 | 2015-03-19 | ソニー株式会社 | 固体撮像素子、固体撮像素子の製造方法、および電子機器 |
| JP2015082592A (ja) * | 2013-10-23 | 2015-04-27 | ソニー株式会社 | 固体撮像素子およびその製造方法、並びに電子機器 |
| JP2016136584A (ja) * | 2015-01-23 | 2016-07-28 | 株式会社東芝 | 固体撮像装置および固体撮像装置の製造方法 |
| WO2017183477A1 (ja) * | 2016-04-22 | 2017-10-26 | ソニー株式会社 | 固体撮像素子および駆動方法、並びに電子機器 |
| JP2018143491A (ja) | 2017-03-06 | 2018-09-20 | 株式会社サンセイアールアンドディ | 遊技機 |
| WO2018198486A1 (ja) * | 2017-04-28 | 2018-11-01 | ソニーセミコンダクタソリューションズ株式会社 | 固体撮像素子および電子機器 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113053929A (zh) * | 2020-04-20 | 2021-06-29 | 台湾积体电路制造股份有限公司 | 半导体结构、影像感测器和半导体结构的形成方法 |
| US11527563B2 (en) * | 2020-04-20 | 2022-12-13 | Taiwan Semiconductor Manufacturing Company Limited | Photodetector using a buried gate electrode for a transfer transistor and methods of manufacturing the same |
| CN113053929B (zh) * | 2020-04-20 | 2025-03-28 | 台湾积体电路制造股份有限公司 | 半导体结构、影像感测器和半导体结构的形成方法 |
| WO2021235101A1 (ja) * | 2020-05-20 | 2021-11-25 | ソニーセミコンダクタソリューションズ株式会社 | 固体撮像装置 |
| US12316987B2 (en) | 2020-05-20 | 2025-05-27 | Sony Semiconductor Solutions Corporation | Solid-state imaging device |
| WO2023199642A1 (ja) * | 2022-04-15 | 2023-10-19 | ソニーセミコンダクタソリューションズ株式会社 | 光検出装置及び電子機器 |
| WO2024202511A1 (ja) * | 2023-03-31 | 2024-10-03 | ソニーセミコンダクタソリューションズ株式会社 | 光検出装置及び電子機器 |
| WO2024232316A1 (ja) * | 2023-05-10 | 2024-11-14 | ソニーセミコンダクタソリューションズ株式会社 | 半導体装置 |
| WO2025084362A1 (ja) * | 2023-10-17 | 2025-04-24 | ソニーセミコンダクタソリューションズ株式会社 | 光検出装置及び電子機器 |
| WO2025197384A1 (ja) * | 2024-03-18 | 2025-09-25 | ソニーセミコンダクタソリューションズ株式会社 | 光検出装置及び電子機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7341141B2 (ja) | 2023-09-08 |
| US12230654B2 (en) | 2025-02-18 |
| US11923387B2 (en) | 2024-03-05 |
| US20250081646A1 (en) | 2025-03-06 |
| KR102679749B1 (ko) | 2024-07-01 |
| EP4246990A2 (en) | 2023-09-20 |
| TWI840384B (zh) | 2024-05-01 |
| JP7615246B2 (ja) | 2025-01-16 |
| EP3832726B1 (en) | 2023-11-01 |
| US20240021633A1 (en) | 2024-01-18 |
| US20210320135A1 (en) | 2021-10-14 |
| DE112019003845T5 (de) | 2021-05-06 |
| US20220375976A1 (en) | 2022-11-24 |
| CN112534579B (zh) | 2024-11-19 |
| JPWO2020026856A1 (ja) | 2021-08-12 |
| TW202017163A (zh) | 2020-05-01 |
| EP4503642A2 (en) | 2025-02-05 |
| JP2023155306A (ja) | 2023-10-20 |
| EP4246990B1 (en) | 2025-02-12 |
| EP4503642A3 (en) | 2025-04-16 |
| EP4246990A3 (en) | 2023-10-11 |
| EP3832726A4 (en) | 2021-08-25 |
| US11482550B2 (en) | 2022-10-25 |
| KR20210033986A (ko) | 2021-03-29 |
| EP3832726A1 (en) | 2021-06-09 |
| CN112534579A (zh) | 2021-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7615246B2 (ja) | 撮像装置および電子機器 | |
| JPWO2020175195A1 (ja) | 固体撮像装置および電子機器 | |
| WO2021106732A1 (ja) | 撮像装置および電子機器 | |
| US12342640B2 (en) | Solid-state imaging element and imaging apparatus | |
| JP2021019171A (ja) | 固体撮像素子および電子機器 | |
| US20260075974A1 (en) | Imaging device | |
| US20230103730A1 (en) | Solid-state imaging device | |
| WO2021124975A1 (ja) | 固体撮像装置および電子機器 | |
| US20240038807A1 (en) | Solid-state imaging device | |
| WO2022259855A1 (ja) | 半導体装置およびその製造方法、並びに電子機器 | |
| WO2019176303A1 (ja) | 撮像装置駆動回路および撮像装置 | |
| US20230005993A1 (en) | Solid-state imaging element | |
| TWI907010B (zh) | 光檢測裝置 | |
| WO2024057806A1 (ja) | 撮像装置および電子機器 | |
| KR20250040985A (ko) | 고체 촬상 장치 및 그 제조 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19843503 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 20217001608 Country of ref document: KR Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2020533431 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2019843503 Country of ref document: EP Effective date: 20210301 |