WO2019054354A1 - 無段変速機の制御装置および制御方法 - Google Patents
無段変速機の制御装置および制御方法 Download PDFInfo
- Publication number
- WO2019054354A1 WO2019054354A1 PCT/JP2018/033560 JP2018033560W WO2019054354A1 WO 2019054354 A1 WO2019054354 A1 WO 2019054354A1 JP 2018033560 W JP2018033560 W JP 2018033560W WO 2019054354 A1 WO2019054354 A1 WO 2019054354A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- compensation
- continuously variable
- variable transmission
- phase
- ratio
- Prior art date
Links
Images





Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/664—Friction gearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/662—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/68—Inputs being a function of gearing status
- F16H59/70—Inputs being a function of gearing status dependent on the ratio established
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
- F16H61/0437—Smoothing ratio shift by using electrical signals
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H2059/147—Transmission input torque, e.g. measured or estimated engine torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/68—Inputs being a function of gearing status
- F16H59/70—Inputs being a function of gearing status dependent on the ratio established
- F16H2059/702—Rate of change of gear ratio, e.g. for triggering clutch engagement
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/36—Inputs being a function of speed
- F16H59/38—Inputs being a function of speed of gearing elements
- F16H59/42—Input shaft speed
Definitions
- the present invention relates to a control device and control method of a continuously variable transmission mounted on a vehicle.
- Patent Document 1 discloses a technique for lead compensation of a target gear ratio by a response delay of an actual gear ratio with respect to a target gear ratio in relation to transmission control of a continuously variable transmission.
- the resonance frequency of the power train can cause front and back vibration.
- the front-rear vibration is considered to be generated by coupling the torque fluctuation and the transmission of the continuously variable transmission when the stability of the transmission ratio of the continuously variable transmission is insufficient with respect to the torque fluctuation of the powertrain. Therefore, it is conceivable to suppress the longitudinal vibration by performing lead compensation and enhancing the stability of the transmission ratio of the continuously variable transmission, that is, the damping property.
- the lead compensation it is conceivable to fix the lead amount at the peak value frequency and perform lead compensation.
- the peak value frequency is a frequency at which the amount of advance corresponding to the frequency indicates a peak.
- the amount of advance may not be sufficient, and sufficient damping performance may not be obtained.
- lead compensation when the amount of lead is increased, the gain of high frequency is increased. Therefore, when the amount of lead is made too large, there is a problem that the transmission ratio control system becomes unstable.
- An object of the present invention is to provide a control device for a continuously variable transmission capable of obtaining a damping effect while securing stability of a transmission ratio of the continuously variable transmission which performs lead compensation.
- the present invention is a control device for a continuously variable transmission that performs shift control of the continuously variable transmission so that the actual shift control value becomes a target shift control value, A lead compensation unit that performs lead compensation on the target shift control value; A delay compensation unit that performs delay compensation of the target shift control value; According to at least one of an input-side rotational speed of the continuously variable transmission, an input torque to a driven-side rotating element of the continuously variable transmission, and a change ratio of the continuously variable transmission and a change ratio of the change ratio.
- a setting unit configured to set, as the target shift control value, a post-compensation target shift control value compensated by the lead compensation unit and / or the delay compensation unit; Have.
- the post-compensation target shift control value as the target shift control value in the region where the longitudinal vibration occurs. Therefore, it is possible to improve the stability of the transmission ratio of the continuously variable transmission by the lead compensation and the delay compensation of the target shift control value as needed, and by achieving the convergence of the front and rear vibration, the front and rear of the continuously variable transmission Vibration can be properly improved. Further, the stability of the transmission ratio can be improved by the phase lead compensation and / or the phase lag compensation, and the control response of the transmission ratio can be improved.
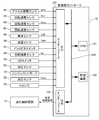
- FIG. 1 is a schematic configuration diagram of a vehicle including a transmission controller of the embodiment.
- the vehicle is equipped with an engine 1 as a power source.
- the power of the engine 1 is driven via a torque converter 2 constituting a powertrain PT, a first gear train 3, a transmission 4, a second gear train (final gear) 5, and a differential gear 6. It is transmitted to the wheel 7.
- the second gear train 5 is provided with a parking mechanism 8 that mechanically locks the output shaft of the transmission 4 in a non-rotatable manner during parking.
- the torque converter 2 has a lockup clutch 2a.
- the transmission 4 is a continuously variable transmission having a variator 20.
- the variator 20 has a pulley 21 which is a primary pulley, a pulley 22 which is a secondary pulley, and a belt 23 wound around the pulleys 21 and 22.
- the pulley 21 constitutes a drive side rotation element
- the pulley 22 constitutes a driven side rotation element.
- the pulleys 21 and 22 are respectively provided on the back of the movable conical plate, a movable conical plate which forms a V-groove between the fixed conical plate and the fixed conical plate with the sheave surface disposed opposite to the fixed conical plate. And a hydraulic cylinder for axially displacing the movable conical plate.
- the pulley 21 has a hydraulic cylinder 23a
- the pulley 22 has a hydraulic cylinder 23b.
- the transmission 4 further includes an auxiliary transmission mechanism 30.
- the auxiliary transmission mechanism 30 is a transmission mechanism having two forward gears and one reverse gear, and has a first gear and a second gear having a smaller gear ratio than the first gear as a forward gear.
- the auxiliary transmission mechanism 30 is provided in series with the variator 20 in a power transmission path from the engine 1 to the drive wheels 7.
- the auxiliary transmission mechanism 30 may be directly connected to the output shaft of the variator 20 as in this example, or may be connected via a power transmission mechanism such as another transmission or gear train. Alternatively, the auxiliary transmission mechanism 30 may be connected to the input shaft side of the variator 20.
- the vehicle controls an oil pump 10 driven by utilizing a part of the power of the engine 1, a hydraulic control circuit 11 which adjusts the hydraulic pressure generated by the oil pump 10 and supplies it to each part of the transmission 4, and hydraulic control And a transmission controller 12 for controlling the circuit 11.
- the hydraulic control circuit 11 includes a plurality of flow paths and a plurality of hydraulic control valves.
- the hydraulic control circuit 11 controls the plurality of hydraulic control valves based on the shift control signal from the transmission controller 12 to switch the hydraulic supply path.
- the hydraulic control circuit 11 also adjusts the necessary hydraulic pressure from the hydraulic pressure generated by the oil pump 10 and supplies the adjusted hydraulic pressure to each part of the transmission 4.
- FIG. 2 is a schematic block diagram of the transmission controller 12 of the embodiment.
- the transmission controller 12 has a CPU 121, a storage device 122 composed of a RAM and a ROM, an input interface 123, an output interface 124, and a bus 125 interconnecting these.
- the input interface 123 is, for example, an output signal of an accelerator opening degree sensor 41 which detects an accelerator opening degree APO representing an operation amount of an accelerator pedal, an output signal of a rotational speed sensor 42 which detects an input side rotational speed of the transmission 4, An output signal of the rotational speed sensor 43 for detecting the rotational speed Nsec of the motor and an output signal of the rotational speed sensor 44 for detecting the output side rotational speed of the transmission 4 are input.
- the input-side rotational speed of the transmission 4 is the rotational speed of the input shaft of the transmission 4, that is, the rotational speed Npri of the pulley 21.
- the output-side rotational speed of the transmission 4 is the rotational speed of the output shaft of the transmission 4, that is, the rotational speed of the output shaft of the auxiliary transmission mechanism 30.
- the input side rotational speed of the transmission 4 may be, for example, a rotational speed of a position such as a turbine rotational speed of the torque converter 2 with a gear train or the like interposed between the transmission 4 and the transmission 4. The same applies to the output side rotational speed of the transmission 4.
- the input interface 123 includes an output signal of the vehicle speed sensor 45 for detecting the vehicle speed VSP, an output signal of the oil temperature sensor 46 for detecting the oil temperature TMP of the transmission 4, an output signal of the inhibitor switch 47 for detecting the position of the select lever, an engine
- the output signal of the rotational speed sensor 48 for detecting the rotational speed Ne of 1, the output signal of the OD switch 49 for expanding the transmission range of the transmission 4 to a transmission ratio smaller than 1 and the hydraulic pressure supplied to the LU clutch 2a
- the output signal of the hydraulic pressure sensor 50, the output signal of the hydraulic pressure sensor 52 which detects the secondary pressure Psec which is the hydraulic pressure supplied to the pulley 22, the output signal of the G sensor 53 which detects the longitudinal acceleration of the vehicle, etc. are input.
- a torque signal of the engine torque Te is also input to the input interface 123 from the engine controller 51 that controls the engine 1.
- the storage device 122 stores a transmission control program of the transmission 4 and various maps used for the transmission control program.
- the CPU 121 reads out and executes the transmission control program stored in the storage device 122, and generates a transmission control signal based on various signals input through the input interface 123. Further, the CPU 121 outputs the generated shift control signal to the hydraulic control circuit 11 via the output interface 124.
- the various values used by the CPU 121 in the arithmetic processing and the calculation result of the CPU 121 are appropriately stored in the storage device 122.
- the transmission 4 may generate longitudinal vibration at a PT resonant frequency Fpt, which is a resonant frequency of the power train PT.
- Fpt PT resonant frequency
- the front-rear vibration is considered to occur due to the torque fluctuation and the transmission shift of the transmission 4 when the stability of the transmission gear ratio of the transmission 4 is insufficient with respect to the torque fluctuation of the powertrain PT. Therefore, the lead compensation is performed, the stability of the transmission gear ratio of the transmission 4 is secured, and the vibration damping property is enhanced, thereby suppressing the longitudinal vibration.
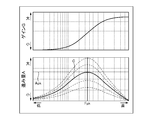
- FIG. 3 is a diagram showing an example of a Bode diagram of the phase lead compensator.
- the horizontal axis of the Bode diagram is a logarithmic representation of the frequency.
- FIG. 3 shows the case where second-order phase lead compensation is performed.
- the peak value frequency Fpk is a frequency at which the lead amount A corresponding to the frequency indicates a peak, and is set according to the target frequency in phase lead compensation.
- the target frequency is the PT resonant frequency Fpt.
- the peak value frequency Fpk is set to, for example, the PT resonance frequency Fpt.
- the amount of advance Apk indicates the amount of advance A according to the peak value frequency Fpk.
- the curve C shows an example of the amount A of advance according to the frequency.
- the amount A of advance according to the frequency is the amount A of advance of phase lead compensation and is the amount A of advance according to the vibration frequency of the torsional vibration of the input shaft of the transmission 4.
- the lead amount A according to the frequency may be understood as the lead amount A corresponding to a certain frequency, such as the PT resonance frequency Fpt, of the curve C.
- the gain corresponding to the curve C is shown as the gain G.
- phase lead compensation by fixing the lead amount Apk at the peak value frequency Fpk as phase lead compensation.
- the damping effect tends to increase as the amount of advance Apk of the peak value frequency Fpk increases. For this reason, it is conceivable to make the advance amount Apk according to the frequency variable according to the driving state of the vehicle.
- the transmission ratio control system 100 since the gain G also increases when the advance amount Apk is increased, there is a concern that the transmission ratio control system 100 described later may become unstable if the advance amount Apk is increased too much. Further, the stability of the transmission ratio control system 100 differs depending on the driving state of the vehicle.
- the advance amount Apk may become inappropriate when the state of the transmission controller 12 changes. Therefore, it is desirable to perform phase delay compensation in addition to phase lead compensation.
- the vehicle vibration due to PT resonance may occur due to an insufficient delay amount B. If the delay amount B is too large, the control system may become unstable and low frequency control excitation may occur.
- the transmission controller 12 (hereinafter also referred to as the controller 12) performs the shift control described below.
- the following description will be made using the transmission ratio Ratio of the variator 20 as the transmission ratio of the transmission 4.
- the gear ratio Ratio is a generic term for the gear ratio of the variator 20 including an actual gear ratio Ratio_A, a target gear ratio Ratio_D, and an ultimate gear ratio Ratio_T described later.
- FIG. 4 is a control block diagram showing the main parts of the transmission ratio control system of the embodiment.
- the transmission ratio control system 100 performs feedback transmission control of the transmission 4 by performing transmission ratio control of the transmission 4 so that the actual transmission control value becomes the target transmission control value.
- the transmission ratio control system 100 includes a controller 12, an actuator 111, and a variator 20.
- the controller 12 includes a target value generation unit 131, an FB compensator 132, a phase compensation on / off determination unit 133, a lead amount determination unit 134, a lead amount filter unit 135, a first phase lead compensator 136, and a second Phase lead compensator 137, first switch unit 138, on / off command filter unit 139, sensor value filter unit 140, first peak value frequency determination unit 141, delay amount determination unit 142, delay amount filter unit 143 , The second peak value frequency determining unit 144, the first phase delay compensator 145, the second phase delay compensator 146, the second switch unit 147, the PT resonance detection unit 150, the oil vibration detection unit 151, and , And a radiation detection unit 152.
- FB is an abbreviation for feedback.
- the target value generation unit 131 generates a target value for shift control. Specifically, the target value is set to a target gear ratio Ratio_D based on a final gear ratio Ratio_T, which is a final target gear shift control value using the gear ratio Ratio as a gear shift control value.
- the shift control value may be, for example, the primary pressure Ppri as a control parameter.
- the final transmission gear ratio Ratio_T is preset in accordance with the driving state of the vehicle in the shift map. For this reason, the target value generation unit 131 reads out the corresponding ultimate transmission gear ratio Ratio_T from the shift map based on the detected driving state. Specifically, the vehicle speed VSP and the accelerator opening APO are used as the driving state of the vehicle.
- the target value generation unit 131 calculates a target gear ratio Ratio_D based on the final gear ratio Ratio_T.
- the target gear ratio Ratio_D is a transient target gear ratio until reaching the final gear ratio Ratio_T, and constitutes a target gear shift control value.
- the calculated target gear ratio Ratio_D is input to the FB compensator 132.
- the FB compensator 132 calculates a feedback command value based on the actual gear ratio Ratio_A and the target gear ratio Ratio_D, which are actual values of the gear ratio Ratio.
- the feedback command value is, for example, a feedback primary command pressure Ppri_FB for compensating for an error between the actual gear ratio Ratio_A and the target gear ratio Ratio_D.
- the FB gain G_FB is made variable.
- the FB gain G_FB is an FB gain of the transmission ratio control of the transmission 4 performed by the transmission ratio control system 100, and is variable according to the driving state of the vehicle.
- the driving state of the vehicle is, for example, a gear ratio Ratio, a change ratio ⁇ of the gear ratio Ratio, an input torque Tpri, and the like.
- the change rate ⁇ of the transmission ratio Ratio is, in other words, the transmission speed.
- the feedback command value (feedback primary command pressure Ppri_FB) calculated by the FB compensator 132 is input to the lead amount determination unit 134 and the first phase lead compensator 136.
- the phase compensation on / off determining unit 133 determines on / off of phase lead compensation and phase lag compensation of the feedback primary command pressure Ppri_FB.
- the phase compensation on / off determination unit 133 includes a pulley state value M, instruction value divergence information of a divergence detection unit 152 described later, an FB gain G_FB, oil oscillation detection information of an oil oscillation detection unit 151 described later, and PT resonance described later. In accordance with the PT resonance information of the detection unit 150 and the target gear ratio Ratio_D, on / off of phase compensation is determined.
- the pulley state value M is a value for determining whether or not the pulleys 21 and 22 are in a state where longitudinal vibration occurs, and the rotational speed Npri, input torque Tsec to the pulley 22, gear ratio Ratio, and gear change It includes the rate of change ⁇ of the ratio Ratio.
- the input torque Tsec can be calculated, for example, as a value obtained by multiplying the engine torque Te by the transmission gear ratio (the gear ratio of the first gear train 3 and the transmission gear ratio of the variator 20) set between the engine 1 and the pulley 22.
- the actual gear ratio Ratio_A and the target gear ratio Ratio_D can be applied to the gear ratio Ratio.
- the gear ratio Ratio may be an actual gear ratio Ratio_A or a target gear ratio Ratio_D.
- phase compensation on / off determination unit 133 performs phase lead compensation and phase delay of feedback primary command pressure Ppri_FB according to all four parameters of rotational speed Npri, input torque Tsec, gear ratio Ratio, and change rate ⁇ . Determine compensation on / off.
- the phase compensation on / off determining unit 133 may be configured to determine on / off of the phase lead compensation and the phase lag compensation according to any parameter of the input torque Tsec, the gear ratio Ratio, and the change ratio ⁇ .
- phase compensation on / off determination unit 133 further performs phase compensation of the feedback primary command pressure Ppri_FB according to the engagement state of the LU clutch 2a, the state of the driver operation for the gear ratio 4 and the presence or absence of a failure. Decide on or off.
- FIG. 5 is a flowchart showing processing performed by the phase compensation on / off determination unit according to the embodiment.
- the processing from step S1 to step S5 is processing to determine whether or not resonance of the powertrain PT occurs, in other words, processing to determine whether longitudinal vibration of the transmission 4 is generated.
- the resonance of the power train PT will be referred to as a PT resonance.
- step S1 it is determined whether or not the pulley state value M is a value at which longitudinal vibration occurs.
- step S1 the following determination is made for each of the rotational speed Npri, the input torque Tsec, the transmission ratio Ratio, and the change ratio ⁇ of the transmission ratio Ratio, which is the pulley state value M.
- FIG. 6 is an explanatory view of a phase compensation area. In FIG. 6, the distribution of the operating points M at a plurality of operating points M is shown. The phase compensation region R is set according to the rotational speed Npri and the input torque Tsec to the pulley 22.
- the phase compensation region R further includes a region R2 in which the input torque Tsec is equal to or higher than the predetermined torque Tsec1 and the rotational speed Npri is equal to or higher than the predetermined rotational speed Npri1.
- the predetermined rotational speed Npri1 is set to increase as the input torque Tsec increases.
- the predetermined rotation speed Npri1 is set to define the boundary B.
- the boundary B is a straight line in which the rotational speed Npri increases in proportion to the input torque Tsec.
- the predetermined torque Tsec1 and the predetermined rotational speed Npri1 are values for defining the input torque Tsec at which longitudinal vibration occurs and the rotational speed Npri, and can be set in advance by experiments or the like.
- the phase compensation area R includes an operating point M when the accelerator pedal is depressed at an opening degree corresponding to a road load, that is, a road load, during coasting.
- the operating point M is not distributed in a region lower than the rotation speed Npri corresponding to the idle rotation speed of the engine 1.
- the area divided from the phase compensation area R at the boundary B is the bounce area RX.
- the instruction pressure before applying phase compensation to the feedback primary instruction pressure Ppri_FB is defined as Ppri_D1
- the instruction pressure after phase compensation is defined as Ppri_D2.
- Ppri_D1 the instruction pressure before applying phase compensation to the feedback primary instruction pressure Ppri_FB
- Ppri_D2 the instruction pressure after phase compensation
- the phase compensation region R is set when the transmission ratio Ratio is larger than the predetermined transmission ratio Ratio1, in other words, when the transmission ratio Ratio is lower than the predetermined transmission ratio Ratio1.
- the predetermined gear ratio Ratio1 is a value for defining a gear ratio at which front and rear vibration occurs, and is, for example, one.
- the predetermined gear ratio Ratio 1 can be preset by an experiment or the like.
- the phase compensation region R is further set for the case where the change ratio ⁇ of the transmission ratio Ratio is smaller than a predetermined value ⁇ 1.
- the predetermined value ⁇ 1 is a value for defining the rate of change of the transmission ratio Ratio at which longitudinal vibration occurs. Specifically, the predetermined value ⁇ 1 is set as a determination value for determining whether the transmission ratio Ratio is in a steady state. The predetermined value ⁇ 1 can be preset by an experiment or the like.
- the phase compensation region R is set for the case where the LU clutch 2a is further engaged. In the embodiment, the phase compensation area R itself is set in accordance with the transmission ratio Ratio, the change rate ⁇ , and the engagement state of the LU clutch 2a. The same applies to the operating point M.
- FIG. 7 is a flowchart of determining whether the operating point M is within the phase compensation region.
- step S11 it is determined whether or not the input torque Tsec is smaller than the predetermined torque Tsec1. If Tsec is equal to or greater than Tsec1, the process proceeds to step S22. If Tsec is smaller than Tsec1, the process proceeds to step S13.
- step S12 it is determined whether the rotational speed Npri is larger than a predetermined rotational speed Npri1. If larger, the process proceeds to step S13, and if Npri is equal to or less than Npri1, the process proceeds to step S17.
- step S13 it is determined whether the transmission ratio Ratio is larger than a predetermined transmission ratio Ratio1.
- step S13 it is determined whether the actual gear ratio Ratio_A or the target gear ratio Ratio_D is larger than a predetermined gear ratio Ratio1. Whether or not Ratio is greater than Ratio 1 can be determined, for example, by whether or not the OD switch 49 is OFF.
- the actual gear ratio Ratio_A and the target gear ratio Ratio_D may be calculated values. If it is determined in step S13 that the value is large, the process proceeds to step S14. Otherwise, the process proceeds to step S17.
- step S14 it is determined whether the change rate ⁇ is smaller than a predetermined value ⁇ 1. Whether or not the change rate ⁇ is smaller than the predetermined value ⁇ 1 is, for example, in a state where the gear ratio Ratio is fixed by the driver operation, such as whether the manual range is selected by the select lever based on the output of the inhibitor switch 47 It can be determined by whether or not it exists. If it is determined in step S14 that the change rate ⁇ is smaller than the predetermined value ⁇ 1, the process proceeds to step S15. Otherwise, the process proceeds to step S17. In step S15, it is determined whether the LU clutch 2a is engaged. Whether or not the LU clutch 2a is engaged can be determined based on the output of the hydraulic pressure sensor 50.
- step S16 it is determined that the operating point M is in the phase compensation region R.
- step S17 it is determined that the operating point M is not in the phase compensation region R. In other words, it is determined that the operating point M is in the bounce region RX.
- step S1 of FIG. 5 when it is determined that all of the pulley state values M are the longitudinal vibration generation value, the process proceeds to step S2.
- step S5 when it is determined that any of these pulley state values M is not the front / rear vibration generation value, the process proceeds to step S5, and it is determined that PT resonance is not performed. Therefore, it is determined that front-rear vibration does not occur, and the process proceeds to step S10 to turn off phase compensation.
- step S2 it is determined whether the LU clutch 2a is engaged. Thus, on / off of the phase compensation is determined according to the engagement state of the LU clutch 2a. If the LU clutch 2a is released, it is judged that longitudinal vibration does not occur, and the process proceeds to step S5. If the LU clutch 2a is engaged, it is determined that longitudinal vibration is generated, and step S3 Go to
- step S3 it is determined whether or not the driver operation on the transmission 4 is in a predetermined state, and the first operation state in which the gear ratio Ratio becomes larger than the predetermined gear ratio Ratio1 or the gear ratio Ratio becomes steady. It is determined whether or not it is the second operation state.
- the OD switch 49 In the first operation state, the OD switch 49 is in the OFF state.
- the second operation state is a state in which the gear ratio Ratio is fixed by a driver operation, such as a state in which a manual range is selected by a select lever, a state in which a manual mode such as a sport mode is selected.
- step S3 it is determined that the transmission ratio Ratio is continuously larger than the predetermined transmission ratio Ratio1 or that the transmission ratio Ratio1 is continuously in a steady state. can do. Therefore, it is determined with certainty that the transmission ratio Ratio is in a state where longitudinal vibration occurs. If it is determined in step S3 that the vehicle is not in the predetermined state, the process proceeds to step S5. If it is determined that the vehicle is in the predetermined state, the process proceeds to step S4.
- step S4 it is determined that PT resonance occurs and the process proceeds to step S6.
- steps S6 to S8 it is determined whether or not phase compensation can be turned on. In other words, it is determined whether or not phase compensation is to be performed.
- step S6 it is determined whether there is a failure.
- the failure is, for example, a failure related to the hydraulic control circuit 11 used for transmission control of the transmission 4 and the transmission 4 including failures of sensors and switches. In addition, it may be a failure of another vehicle related to the transmission 4. If it is determined in step S6 that there is a failure, the process proceeds to step S8 to inhibit the execution of the phase compensation, and proceeds to step S10 to turn off the phase compensation. On the other hand, when it is determined that there is no failure, the process proceeds to step S7 to permit execution of the phase compensation, and proceeds to step S9 to turn on the phase compensation.
- the phase compensation on / off determination unit 133 outputs an on command when it determines that phase compensation is on, and outputs an off command when it determines that phase compensation is off.
- the on / off command is input from the phase compensation on / off determination unit 133 to the lead amount determination unit 134 and the on / off command filter unit 139.
- the advance amount determination unit 134 determines the advance amount Apk.
- the advance amount determining unit 134 is provided on the downstream side of the phase compensation on / off determining unit 133.
- the lead amount determination unit 134 is thus provided in terms of arrangement in the signal path.
- the advance amount determination unit 134 determines the advance amount Apk in response to the on / off command, in other words, in accordance with the on / off determination of the phase compensation.
- the advance amount determination unit 134 determines the advance amount Apk to be zero when the off command is input.
- the amount-of-advance determination unit 134 determines the amount of advancement Apk according to the driving state of the vehicle.
- the FB gain G_FB, the rotational speed Npri, the input torque Tsec, the gear ratio Ratio, the secondary pressure Psec, and the oil temperature TMP are input to the lead amount determination unit 134 as parameters for indicating the driving state of the vehicle.
- the amount-of-advance determination unit 134 determines the amount of advancement Apk in accordance with the plurality of parameters. In other words, the advance amount Apk is made variable according to the driving state of the vehicle.
- the advance amount determination unit 134 may change the advance amount Apk according to at least one of the plurality of parameters.
- the lead amount determination unit 134 can make the lead amount Apk variable according to the operating condition by determining the lead amount Apk according to each parameter, and can set the lead amount A at the target frequency.
- the advance amount A is to be increased, it is limited to a stable operable range in consideration of the relationship with the specific specifications of the gear ratio control system 100 such as the variator 20. This limitation can be obtained in advance by calculation or experiment as a limitation amount corresponding to each parameter.
- the amount of advance Apk is actually determined by further reducing the amount of advance Apk determined in accordance with each parameter by a limited amount set in accordance with each parameter.
- the advance amount determination unit 134 determines the first advance amount Apk1 and the second advance amount Apk2 based on the determined advance amount Apk.
- the first advance amount Apk1 is set corresponding to when performing first-order phase lead compensation described later
- the second lead amount Apk2 is set corresponding to when performing second-order phase lead compensation described later.
- the second advance amount Apk2 is 1 ⁇ 2 of the first advance amount Apk1.
- the advance amount Apk determined according to each parameter is set to correspond to the second advance amount Apk2.
- the advance amount Apk determined according to each parameter may be set to correspond to the first advance amount Apk1.
- the advance amount Apk is input from the advance amount determination unit 134 to the advance amount filter unit 135.
- the advance amount filter unit 135 is provided downstream of the advance amount determination unit 134 and performs filter processing of the advance amount Apk.
- the lead amount filter unit 135 is thus provided in the arrangement in the signal path.
- the lead amount filter unit 135 is a low pass filter unit, and is configured of, for example, a first order low pass filter.
- the advance amount filter unit 135 performs the filtering process of the advance amount Apk to smooth the change of the gain G of the phase compensation according to the determination of the on / off of the phase compensation when the on / off of the advance compensation is switched. Configure the gain smoothing section. By smoothing the change of the gain G, it is possible to suppress the change amount of the gain G accompanying the switching of the phase compensation on and off.
- the lead amount Apk is input from the lead amount filter unit 135 to the first phase lead compensator 136, the second phase lead compensator 137, and the first switch unit 138.
- the peak value frequency Fpk is also input from the first peak value frequency determination unit 141 to the first phase lead compensator 136 and the second phase lead compensator 137.
- the first phase lead compensator 136 and the second phase lead compensator 137 perform first-order phase lead compensation of the feedback primary command pressure Ppri_FB based on the lead amount Apk inputted together with the inputted peak value frequency Fpk. .
- phase lead compensation of the feedback primary command pressure Ppri_FB phase lead compensation of feedback shift control of the transmission 4 is performed.
- the first phase lead compensator 136 and the second phase lead compensator 137 are formed by a first-order filter, and the filtering according to the input lead amount Apk and further the input peak value frequency Fpk To perform the first-order phase lead compensation of the feedback primary command pressure Ppri_FB.
- the second phase lead compensator 137 is provided in series with the first phase lead compensator 136.
- the second phase lead compensator 137 is thus provided in the arrangement in the signal path.
- the second phase lead compensator 137 receives the feedback primary command pressure Ppri_FB on which the first phase lead compensation has been performed by the first phase lead compensator 136. Therefore, when performing the first-order phase lead compensation of the feedback primary command pressure Ppri_FB, the second phase lead compensator 137 further superimposes the first-order phase lead compensation. Thereby, second-order phase lead compensation of the feedback primary command pressure Ppri_FB is performed.
- the second phase lead compensator 137 constitutes a lead compensator together with the first phase lead compensator 136.
- the first switch unit 138 performs phase lead compensation with the first phase lead compensator 136 and the second phase lead compensator 137 according to the input lead amount Apk, that is, performs second-order phase lead compensation.
- phase lead compensation is performed only by the first phase lead compensator 136, that is, the case where first-order phase lead compensation is performed is switched.
- the second-order phase lead compensation it is possible to suppress the increase in the gain G and to suppress the destabilization of the shift control as compared to the case where the first-order phase lead compensation is performed.
- the predetermined value A1 can be preferably set to a minimum value within the range in which the gain suppression effect by the secondization of the phase lead compensation can be obtained.
- the lead amount determination unit 134 and the first switch unit 138 are specifically configured as follows. That is, when the amount of advance A determined according to each parameter is smaller than the predetermined value A1, the amount of advance determination unit 134 determines that primary phase lead compensation is to be performed, and determines the amount of advance Apk as the first amount of advance Apk1. Do. Further, the lead amount determination unit 134 determines that secondary phase lead compensation is to be performed when the lead amount A is a predetermined value A1 or more, and determines the lead amount Apk as the second lead amount Apk2.
- the advance amount A can be set in advance by map data or the like.
- the first switch unit 138 When the first lead amount Apk1 is selected, the first switch unit 138 performs switching so that phase lead compensation is performed only by the first phase lead compensator 136. In addition, the first switch unit 138 performs switching so that phase lead compensation is performed by the first phase lead compensator 136 and the second phase lead compensator 137 when the second lead amount Apk2 is selected. With this configuration, the first phase lead compensator 136 and the second phase lead compensator 137 perform phase lead compensation only with the first phase lead compensator 136 when the lead amount A is smaller than the predetermined value A1. Configured to do.
- the first switch unit 138 may be configured to perform phase lead compensation only with the second phase lead compensator 137 when performing first-order phase lead compensation.
- the lead amount determination unit 134 may input the lead amount A to the first switch unit 138 instead of the lead amount Apk.
- the first switch unit 138 may perform switching based on the lead amount A input in this manner. As a result, even if the first lead amount Apk1 and the second lead amount Apk2 are smoothed, the primary and secondary phase lead compensation can be appropriately performed.
- the first switch unit 138 together with the phase compensation on / off determination unit 133, is a feedback in which lead compensation is performed by at least one of the first phase lead compensator 136 and the second phase lead compensator 137 according to the pulley state value M.
- the primary command pressure Ppri_FB is set as a feedback primary command pressure Ppri_FB.
- At least one of the first phase lead compensator 136 and the second phase lead compensator 137 configures a lead compensating unit that performs lead compensation of the feedback primary command pressure Ppri_FB.
- the feedback primary command pressure Ppri_FB subjected to the lead compensation is output to the first phase delay compensator 145.
- the first peak value frequency determination unit 141 determines the peak value frequency Fpk1 of the phase lead compensation.
- the first peak value frequency determination unit 141 changes the peak value frequency Fpk1 by determining the peak value frequency Fpk1 in accordance with the transmission ratio Ratio.
- the target gear ratio Ratio_D is input from the target value generator 131 to the gear ratio Ratio.
- the peak value frequency Fpk1 determined by the first peak value frequency determination unit 141 is input to each of the first phase lead compensator 136 and the second phase lead compensator 137.
- the first peak value frequency determination unit 141 sets the peak value frequency Fpk of each of the phase lead compensations performed by the first phase lead compensator 136 and the second phase lead compensator 137 based on the gear ratio Ratio. Configured
- the delay amount determination unit 142 determines the delay amount Bpk.
- the delay amount determining unit 142 is provided on the downstream side of the phase compensation on / off determining unit 133.
- the delay amount determination unit 142 is thus provided in terms of arrangement in the signal path.
- the delay amount determination unit 142 determines the delay amount Bpk according to the on / off command, in other words, according to the on / off determination of the phase compensation.
- the delay amount determination unit 142 determines the delay amount Bpk to be zero when the off command is input.
- the delay amount determination unit 142 determines the delay amount Bpk in accordance with the driving state of the vehicle when the on command is input.
- the delay amount determination unit 142 uses the FB gain G_FB, the rotational speed Npri, the input torque Tsec, the gear ratio Ratio, the secondary pressure Psec, the vehicle acceleration, the brake operation state, the primary pressure Ppri, and the engine as parameters indicative of the driving state of the vehicle.
- the torque, the torque ratio of the torque converter, the engagement state of the LU clutch 2a, the oil temperature TMP and the like are input.
- the delay amount determination unit 142 determines the amount of advance Bpk according to the plurality of parameters. In other words, the amount Bpk of advance is made variable according to the driving state of the vehicle.
- the delay amount determining unit 142 may change the delay amount Bpk in accordance with at least one of the plurality of parameters.
- the delay amount determination unit 142 can change the delay amount Bpk according to each parameter according to each parameter based on the setting not shown, so that it can be variable according to the operating condition, and can set the delay amount B at the target frequency. .
- the delay amount B is to be increased, it is limited to a stable operable range in consideration of the relationship with the specific specifications of the gear ratio control system 100 such as the variator 20. This limitation can be obtained in advance by calculation or experiment as a limitation amount corresponding to each parameter.
- the amount of delay Bpk is actually determined by further reducing the amount of delay Bpk determined according to each parameter by a limited amount set according to each parameter.
- the delay amount determination unit 142 determines the first delay amount Bpk1 and the second delay amount Bpk2 based on the determined delay amount Bpk.
- the first delay amount Bpk1 is set corresponding to the case of performing the first-order phase delay compensation described later
- the second delay amount Bpk2 is set corresponding to the case of performing the second-order phase delay compensation described later.
- the second delay amount Bpk2 is 1 ⁇ 2 of the first delay amount Bpk1.
- the delay amount Bpk determined according to each parameter is set to correspond to the second delay amount Bpk2.
- the delay amount Bpk determined according to each parameter may be set to correspond to the first delay amount Bpk1.
- the delay amount Bpk is input from the delay amount determination unit 142 to the delay amount filter unit 143.
- the delay amount filter unit 143 is provided downstream of the delay amount determination unit 142 and performs filter processing of the delay amount Bpk.
- the delay amount filter unit 143 is thus provided in the arrangement in the signal path.
- the delay amount filter unit 143 is a low pass filter unit, and is configured of, for example, a first order low pass filter.
- the delay amount filter unit 143 performs the filtering process of the delay amount Bpk to smooth the change of the gain of the phase delay compensation according to the determination of the phase compensation on / off when the phase compensation on / off is switched. Configure the gain smoothing section. By smoothing the change in gain, it is possible to suppress the amount of change in gain accompanying the switching of phase compensation on and off.
- the second peak value frequency determination unit 144 determines the peak value frequency Fpk2 of the phase lag compensation.
- the second peak value frequency determination unit 144 changes the peak value frequency Fpk2 by determining the peak value frequency Fpk2 in accordance with the transmission ratio Ratio.
- the target gear ratio Ratio_D is input from the target value generator 131 to the gear ratio Ratio.
- the peak value frequency Fpk2 determined by the second peak value frequency determination unit 144 is input to each of the first phase delay compensator 145 and the second phase delay compensator 146.
- the second peak value frequency determination unit 144 sets the peak value frequency Fpk2 of each of the phase lead compensations performed by the first phase delay compensator 145 and the second phase delay compensator 146 based on the transmission ratio Ratio.
- the delay amount Bpk is input from the delay amount filter unit 143 to the first phase delay compensator 145, the second phase delay compensator 146, and the second switch unit 147.
- the peak value frequency Fpk2 is also input from the second peak value frequency determining unit 144 to the first phase delay compensator 145 and the second phase delay compensator 146.
- the first primary delay compensation of the feedback primary command pressure Ppri_FB is performed based on the delay amount Bpk input together with the first phase delay compensator 145 and the second phase delay compensator 146 and the peak value frequency Fpk2 input. .
- phase lag compensation of the feedback primary command pressure Ppri_FB phase lag compensation of feedback shift control of the transmission 4 is performed.
- the first phase retarder 145 and the second phase delay compensator 146 are formed by a first-order filter, and the filtering process according to the input delay amount Bpk and further the input peak value frequency Fpk2 To perform first-order phase delay compensation of the feedback primary command pressure Ppri_FB.
- the second phase delay compensator 146 is provided in series with the first phase delay compensator 145.
- the second phase delay compensator 146 is thus provided in the arrangement in the signal path.
- the second phase lag compensator 146 receives the feedback primary command pressure Ppri_FB which has been subjected to the first-order phase lag compensation by the first phase lag compensator 145. Therefore, when performing the first-order phase delay compensation of the feedback primary command pressure Ppri_FB, the second phase delay compensator 146 further superimposes the first-order phase delay compensation. As a result, second-order phase delay compensation of the feedback primary command pressure Ppri_FB is performed.
- the second phase delay compensator 146 constitutes a delay compensator together with the first phase delay compensator 146.
- the second switch unit 147 performs phase delay compensation with the first phase delay compensator 145 and the second phase delay compensator 146 according to the input delay amount Bpk, that is, performs second-order phase delay compensation.
- phase delay compensation is performed only by the first phase delay compensator 145, that is, the case where first-order phase delay compensation is performed is switched.
- the second-order phase delay compensation it is possible to narrow the range affected by the delay amount as compared to the case where the first-order phase delay compensation is performed. Therefore, it is not necessary to lower the peak frequency Fpk2, and it is possible to avoid reaching the stability limit immediately.
- phase delay compensation is performed only by the first phase delay compensator 145, and the advance amount B is predetermined.
- second phase lag compensation is performed using a second phase lag compensator.
- the delay amount determination unit 142 and the second switch unit 147 are specifically configured as follows. That is, when the delay amount B determined according to each parameter is smaller than the predetermined value B1, the delay amount determination unit 142 determines that primary phase delay compensation is to be performed, and determines the delay amount Bpk as the first delay amount Bpk1. Do. Further, the delay amount determination unit 142 determines that secondary phase delay compensation is to be performed when the delay amount B is equal to or larger than the predetermined value B1, and determines the delay amount Bpk as the second delay amount Bpk2.
- the delay amount B can be preset by map data or the like.
- the second switch unit 147 When the first delay amount Bpk1 is selected, the second switch unit 147 performs switching such that phase delay compensation is performed only by the first phase delay compensator 145. Further, the second switch unit 147 performs switching such that phase delay compensation is performed by the first phase delay compensator 145 and the second phase delay compensator 146 when the second delay amount Bpk2 is selected.
- the first phase delay compensator 145 and the second phase delay compensator 146 compensate for the phase delay only by the first phase delay compensator 145 when the delay amount B is smaller than the predetermined value B1. Configured to do. That is, as the amount of delay of the phase delay compensator increases, the phase delay at the peak frequency peak can be reduced.
- the control excitation is less likely to occur.
- the delay amount exceeds 40 deg
- the amount by which the high frequency gain is reduced decreases, and the robustness decreases. Therefore, when the delay amount is less than 40 deg, only the first phase delay compensator 145 is used because the demerit due to the secondary processing becomes strong.
- the second switch unit 147 may be configured to perform phase delay compensation only with the second phase delay compensator 146 when performing first-order phase delay compensation.
- the delay amount determination unit 142 may input the delay amount B to the second switch unit 147 instead of the delay amount Bpk.
- the second switch unit 147 may perform switching based on the delay amount B thus input. As a result, even if the first delay amount Bpk1 and the second delay amount Bpk2 are smoothed, the primary and secondary phase delay compensation can be appropriately performed.
- the second switch unit 147 together with the phase compensation on / off determination unit 133, performs feedback in which delay compensation is performed by at least one of the first phase delay compensator 136 and the second phase delay compensator 137 according to the pulley state value M.
- a setting unit configured to set primary indicated pressure Ppri_FB as feedback primary indicated pressure Ppri_FB is configured.
- At least one of the first phase delay compensator 136 and the second phase delay compensator 137 constitutes a delay compensation unit that performs delay compensation of the feedback primary command pressure Ppri_FB.
- the feedback primary command pressure Ppri_FB for which the delay compensation has been performed constitutes a feedback command value after compensation.
- primary command pressure Ppri_FF (the target primary command pressure for determining the balance thrust and the gear ratio is set to the actuator 111 on the basis of the feedback primary command pressure Ppri_FB selected from the first switch portion 138 and the target gear ratio Ratio_D. Is input.
- the actuator 111 is, for example, a primary pressure control valve for controlling the primary pressure Ppri provided in the hydraulic control circuit 11, and is primary so that the actual pressure Ppri_A of the primary pressure Ppri becomes the command pressure Ppri_D corresponding to the target gear ratio Ratio_D. Control the pressure Ppri.
- the gear ratio Ratio is controlled such that the actual gear ratio Ratio_A becomes equal to the target gear ratio Ratio_D.
- the sensor unit 40 detects an actual gear ratio Ratio_A of the variator 20.
- the sensor unit 40 includes a rotational speed sensor 42 and a rotational speed sensor 43.
- the actual gear ratio Ratio_A which is the actual value (sensor value) of the gear ratio detected by the sensor unit 40, is input to the sensor value filter unit 140.
- the sensor value filter unit 140 also receives the on / off command via the on / off command filter unit 139.
- the on / off command filter unit 139 outputs the on command to the sensor value filter unit 140 when the lead compensation is turned on, and outputs the off command to the sensor value filter unit 140 when the lead compensation is turned off. When the compensation is turned off, the off command is output to the sensor value filter unit 140.
- the on / off command filter unit 139 may be omitted.
- the sensor value filter unit 140 performs filter processing of the actual gear ratio Ratio_A.
- the mode of the filtering process is changed according to the on / off command.
- the order or execution / stop of the filtering process is switched according to the on / off command.
- the sensor value filter unit 140 is a first-order low-pass filter when the off command is input, and is a high-order low-pass filter when the on command is input, or stops the filter processing.
- the sensor value filter unit 140 can be configured to have, for example, one or more first-order low-pass filters provided so as to be able to switch execution / stop or order of the filter processing.
- the actual gear ratio Ratio_A from the sensor value filter unit 140 is input to the FB compensator 132.
- the PT resonance detection unit 150 extracts the vibration component of the longitudinal acceleration G detected by the G sensor 53, and determines that vibration occurs when the amplitude of the vibration component continues to be equal to or greater than a predetermined value for a predetermined time or more. Do. On the other hand, when the state where the amplitude of the vibration component is less than the predetermined value continues for the predetermined time or more, it is determined that the vibration is not generated.
- the oil vibration detection unit 151 first converts the voltage signal detected by the hydraulic pressure sensor 52 into a hydraulic pressure signal, removes DC components (variation components corresponding to the control command) by band pass filtering, and extracts only vibration components. Do. Then, the amplitude of the vibration component is calculated, and when the state where the amplitude of the hydraulic pressure signal is equal to or more than a predetermined amplitude continues for a predetermined time or more, it is determined that oil vibration is generated. On the other hand, when oil vibration is occurring, if the state where the amplitude is less than the predetermined amplitude continues for a predetermined time or more, it is determined that oil vibration is not occurring.
- the primary pulley hydraulic pressure may be used as the hydraulic pressure signal, or both may be used.
- the divergence detection unit 152 detects whether or not the final command signal is diverging. Here, the divergence of the command signal is detected based on whether or not the state where the frequency is a predetermined value or more and the amplitude is a predetermined value or more continues for a predetermined time.
- a control device for a continuously variable transmission that performs shift control of the transmission 4 so that the actual pressure Ppri_A becomes the command pressure Ppri_D, and a first phase lead compensator 136 and a first phase lead compensator 136 that performs the lead compensation of the command pressure Ppri_D Of the two-phase lead compensator 137, the first phase delay compensator 145 and the second phase delay compensator 146 for delay compensating the command pressure Ppri_D, the rotational speed Npri, the input torque Tsec, the gear ratio Ratio, and the change ratio ⁇ .
- An instruction pressure Ppri_D2 compensated by the first phase lead compensator 136, the second phase lead compensator 137, the first phase delay compensator 145, and the second phase delay compensator 146 is indicated according to at least one of them.
- the stability of the transmission ratio Ratio is enhanced by the phase compensation, it is possible to improve the control response of the transmission ratio Ratio. Furthermore, when it is not necessary to increase the stability of the gear ratio Ratio, it is possible to prevent the occurrence of the vibration of the actual pressure Ppri_A. Further, the sensor value filter unit 140 performs a filter process and configures a high-order low-pass filter. Therefore, when a first-order low-pass filter is used, the delay can be improved with respect to the occurrence of a slight delay in the region below the frequency to be removed, whereby the phase of the command pressure Ppri_D can be further advanced.
- the phase compensation on / off determination unit 133 indicates the command pressure when the operating point M corresponding to the rotational speed Npri and the input torque Tsec is in the phase compensation region R set according to the rotational speed Npri and the input torque Tsec.
- Ppri_D2 compensated target shift control value
- Ppri_D target shift control value
- the phase compensation region R includes a region where the input torque Tsec is smaller than the predetermined torque Tsec1. Therefore, the phase compensation region R can be set appropriately.
- the phase compensation region R further includes a region R2 in which the input torque Tsec is equal to or higher than the predetermined torque Tsec1 and the rotational speed Npri is equal to or higher than the predetermined rotational speed Npri1.
- the predetermined rotational speed Npri1 is set to increase as the input torque Tsec increases. Therefore, the phase compensation region R can be set more appropriately.
- the phase compensation on / off determining unit 133 sets the command pressure Ppri_D2 as the command pressure Ppri_D when the gear ratio Ratio is larger than the predetermined gear ratio Ratio1. Thereby, the longitudinal vibration can be appropriately improved according to the transmission ratio Ratio.
- the phase compensation on / off determination unit 133 sets the instruction pressure Ppri_D2 as the instruction pressure Ppri_D when the change rate ⁇ is smaller than the predetermined value. Thereby, the longitudinal vibration can be appropriately improved according to the change rate ⁇ .
- the phase compensation on / off determination unit 133 sets the command pressure Ppri_D2 as the command pressure Ppri_D according to all four parameters of the rotational speed Npri1, the input torque Tsec, the gear ratio Ratio, and the change rate ⁇ .
- the instruction pressure Ppri_D2 may be set as the instruction pressure Ppri_D in accordance with at least one of the four parameters.
- the front-rear vibration can be appropriately improved by appropriately increasing the stability of the transmission ratio Ratio in relation to any of the parameters.
- the phase compensation area R itself is set according to the transmission ratio Ratio, the change rate ⁇ and the engagement state of the LU clutch 2a has been described.
- the determination as to whether or not the operating point M is in the phase compensation region R does not include the determination of the gear ratio Ratio, the change rate ⁇ , and the engagement state of the LU clutch 2a, and performs another determination. May be configured.
- the first switch unit 138 or the second switch unit 147 may make the determination. Further, in the embodiment, an example in which the above control is configured in the transmission controller 12 is shown, but may be realized by a plurality of controllers.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control Of Transmission Device (AREA)
Abstract
無段変速機(4)の変速機コントローラ(12)は、指示圧(Ppri_D)の進み補償を行う進み補償器(136,137)と、指示圧(Ppri_D)の遅れ補償を行う遅れ補償器(145,146)と、入力側回転速度(Npri)、入力トルク(Tsec)、変速比(Ratio)、変化率(α)のうち少なくともいずれかに応じて、進み補償器(136,137)及び/又は遅れ補償器(145,146)によって進み補償及び/又は遅れ補償が行われた指示圧(Ppri_D2)を指示圧とする位相補償オンオフ決定部(133)と、を有する。
Description
本発明は、車両に搭載される無段変速機の制御装置および制御方法に関する。
特許文献1には、無段変速機の変速制御に関し、目標変速比に対する実変速比の応答遅れ分だけ目標変速比を進み補償する技術が開示されている。
無段変速機では、パワートレインの共振周波数で前後方向の振動を引き起こすことがある。前後振動は、パワートレインのトルク変動に対して無段変速機の変速比の安定性が不足している場合に、トルク変動と無段変速機の変速とが連成して発生すると考えられる。このため、進み補償を行い、無段変速機の変速比の安定性、つまり制振性を高めることで、前後振動を抑制することが考えられる。進み補償としては、ピーク値周波数における進み量を固定して進み補償を行うことが考えられる。ピーク値周波数は、周波数に応じた進み量がピークを示す周波数である。しかしながら、車両の運転状態によっては進み量が足りず、十分な制振性能が得られないおそれがある。一方、進み補償では、進み量を大きくすると、高周波のゲインが大きくなるため、進み量を大きくしすぎると、変速比制御系が不安定になるという問題があった。
本発明は、進み補償を行う無段変速機の変速比の安定性を確保しつつ制振効果を得ることが可能な無段変速機の制御装置を提供することを目的とする。
本発明は、実変速制御値が目標変速制御値になるように無段変速機の変速制御を行う無段変速機の制御装置であって、
前記目標変速制御値の進み補償を行う進み補償部と、
前記目標変速制御値の遅れ補償を行う遅れ補償部と、
前記無段変速機の入力側回転速度、前記無段変速機の従動側回転要素への入力トルク、前記無段変速機の変速比及び変速比の変化率のうち少なくともいずれかに応じて、前記進み補償部及び/又は前記遅れ補償部によって補償が行われた補償後目標変速制御値を前記目標変速制御値として設定する設定部と、
を有する。
前記目標変速制御値の進み補償を行う進み補償部と、
前記目標変速制御値の遅れ補償を行う遅れ補償部と、
前記無段変速機の入力側回転速度、前記無段変速機の従動側回転要素への入力トルク、前記無段変速機の変速比及び変速比の変化率のうち少なくともいずれかに応じて、前記進み補償部及び/又は前記遅れ補償部によって補償が行われた補償後目標変速制御値を前記目標変速制御値として設定する設定部と、
を有する。
よって、前後振動が発生する領域で補償後目標変速制御値を目標変速制御値として設定することができる。このため、目標変速制御値の進み補償及び遅れ補償による無段変速機の変速比の安定性向上を必要に応じて図ることができ、前後振動の収束を図ることで、無段変速機の前後振動を適切に改善できる。また、位相進み補償及び/又は位相遅れ補償により変速比の安定性を高めることができ、変速比の制御応答性を向上できる。
[実施例]
図1は、実施例の変速機コントローラを含む車両の概略構成図である。車両は動力源としてエンジン1を備える。エンジン1の動力は、パワートレインPTを構成するトルクコンバータ2と、第1ギヤ列3と、変速機4と、第2ギヤ列(ファイナルギヤ)5と、差動装置6と、を介して駆動輪7へと伝達される。第2ギヤ列5には、駐車時に変速機4の出力軸を機械的に回転不能にロックするパーキング機構8が設けられている。
図1は、実施例の変速機コントローラを含む車両の概略構成図である。車両は動力源としてエンジン1を備える。エンジン1の動力は、パワートレインPTを構成するトルクコンバータ2と、第1ギヤ列3と、変速機4と、第2ギヤ列(ファイナルギヤ)5と、差動装置6と、を介して駆動輪7へと伝達される。第2ギヤ列5には、駐車時に変速機4の出力軸を機械的に回転不能にロックするパーキング機構8が設けられている。
トルクコンバータ2は、ロックアップクラッチ2aを有する。ロックアップクラッチ2aが締結されると、トルクコンバータ2の滑りが無くなり、トルクコンバータ2の伝達効率が向上する。以下、ロックアップクラッチ2aをLUクラッチ2aと記載する。
変速機4は、バリエータ20を有する無段変速機である。バリエータ20は、プライマリプーリであるプーリ21と、セカンダリプーリであるプーリ22と、プーリ21,22の間に掛け回されたベルト23と、を有する。プーリ21は、主動側回転要素を構成し、プーリ22は従動側回転要素を構成する。
プーリ21,22は、それぞれ固定円錐板と、固定円錐板に対してシーブ面を対向配置して固定円錐版との間にV溝を形成する可動円錐板と、可動円錐板の背面に設けられ可動円錐板を軸方向に変位させる油圧シリンダと、を有する。プーリ21は、油圧シリンダ23aを有し、プーリ22は、油圧シリンダ23bを有する。
油圧シリンダ23a,23bに供給される油圧を調整すると、V溝の幅が変化し、ベルト23と各プーリ21,22との接触半径が変化し、バリエータ20の変速比が無段階に変化する。バリエータ20は、トロイダル型の無段変速機であってもよい。
変速機4は、バリエータ20を有する無段変速機である。バリエータ20は、プライマリプーリであるプーリ21と、セカンダリプーリであるプーリ22と、プーリ21,22の間に掛け回されたベルト23と、を有する。プーリ21は、主動側回転要素を構成し、プーリ22は従動側回転要素を構成する。
プーリ21,22は、それぞれ固定円錐板と、固定円錐板に対してシーブ面を対向配置して固定円錐版との間にV溝を形成する可動円錐板と、可動円錐板の背面に設けられ可動円錐板を軸方向に変位させる油圧シリンダと、を有する。プーリ21は、油圧シリンダ23aを有し、プーリ22は、油圧シリンダ23bを有する。
油圧シリンダ23a,23bに供給される油圧を調整すると、V溝の幅が変化し、ベルト23と各プーリ21,22との接触半径が変化し、バリエータ20の変速比が無段階に変化する。バリエータ20は、トロイダル型の無段変速機であってもよい。
変速機4は、副変速機構30を更に備える。副変速機構30は、前進2段・後進1段の変速機構であり、前進用変速段として1速と、1速よりも変速比の小さな2速を有する。副変速機構30は、エンジン1から駆動輪7に至る動力伝達経路において、バリエータ20と直列に設けられる。副変速機構30は、この例のようにバリエータ20の出力軸に直接接続されてもよいし、その他の変速ないしギヤ列等の動力伝達機構を介して接続されていてもよい。あるいは、副変速機構30はバリエータ20の入力軸側に接続されていてもよい。
車両は、エンジン1の動力の一部を利用して駆動されるオイルポンプ10と、オイルポンプ10が発生させる油圧を調整して変速機4の各部位に供給する油圧制御回路11と、油圧制御回路11を制御する変速機コントローラ12と、を有する。油圧制御回路11は、複数の流路及び複数の油圧制御弁から構成される。油圧制御回路11は、変速機コントローラ12からの変速制御信号に基づき、複数の油圧制御弁を制御して油圧供給経路を切り替える。また、油圧制御回路11は、オイルポンプ10が発生させる油圧から必要な油圧を調整し、調整した油圧を変速機4の各部位に供給する。これにより、バリエータ20の変速、副変速機構30の変速段の変更、LUクラッチ2aの締結・解放が行われる。
図2は、実施例の変速機コントローラ12の概略構成図である。変速機コントローラ12は、CPU121と、RAM・ROMからなる記憶装置122と、入力インターフェース123と、出力インターフェース124と、これらを相互に接続するバス125と、を有する。
入力インターフェース123は、例えばアクセルペダルの操作量を表すアクセル開度APOを検出するアクセル開度センサ41の出力信号、変速機4の入力側回転速度を検出する回転速度センサ42の出力信号、プーリ22の回転速度Nsecを検出する回転速度センサ43の出力信号、変速機4の出力側回転速度を検出する回転速度センサ44の出力信号が入力される。
入力インターフェース123は、例えばアクセルペダルの操作量を表すアクセル開度APOを検出するアクセル開度センサ41の出力信号、変速機4の入力側回転速度を検出する回転速度センサ42の出力信号、プーリ22の回転速度Nsecを検出する回転速度センサ43の出力信号、変速機4の出力側回転速度を検出する回転速度センサ44の出力信号が入力される。
変速機4の入力側回転速度は、具体的には、変速機4の入力軸の回転速度、すなわちプーリ21の回転速度Npriである。変速機4の出力側回転速度は、具体的には、変速機4の出力軸の回転速度、すなわち副変速機構30の出力軸の回転速度である。変速機4の入力側回転速度は、例えばトルクコンバータ2のタービン回転速度など、変速機4との間にギヤ列等を挟んだ位置の回転速度であってもよい。変速機4の出力側回転速度についても同様である。
入力インターフェース123は、車速VSPを検出する車速センサ45の出力信号、変速機4の油温TMPを検出する油温センサ46の出力信号、セレクトレバーの位置を検出するインヒビタスイッチ47の出力信号、エンジン1の回転速度Neを検出する回転速度センサ48の出力信号、変速機4の変速範囲を1よりも小さい変速比に拡大するためのODスイッチ49の出力信号、LUクラッチ2aへの供給油圧を検出する油圧センサ50の出力信号、プーリ22への供給油圧であるセカンダリ圧Psecを検出する油圧センサ52の出力信号、車両の前後加速度を検出するGセンサ53の出力信号等が入力される。入力インターフェース123には、エンジン1を制御するエンジンコントローラ51から、エンジントルクTeのトルク信号も入力される。
記憶装置122には、変速機4の変速制御プログラム、変速制御プログラムに用いる各種マップ等が格納されている。CPU121は、記憶装置122に格納されている変速制御プログラムを読み出して実行し、入力インターフェース123を介して入力される各種信号に基づいて変速制御信号を生成する。また、CPU121は、生成した変速制御信号を、出力インターフェース124を介して油圧制御回路11に出力する。CPU121が演算処理で使用する各種値及びCPU121の演算結果は記憶装置122に適宜格納される。
変速機4は、パワートレインPTの共振周波数であるPT共振周波数Fptで前後振動が発生することがある。前後振動は、パワートレインPTのトルク変動に対して、変速機4の変速比の安定性が不足している場合に、トルク変動と変速機4の変速とが練成して発生すると考えられる。このため、進み補償を行い、変速機4の変速比の安定性を確保し、制振性を高めることで、前後振動を抑制する。
ところが、車両の走行状態によっては、次に説明するように、進み補償による制振効果が十分に得られない場合がある。図3は、位相進み補償器のボード線図の一例を示す図である。ボード線図の横軸は、周波数を対数表示したものである。図3では、二次の位相進み補償を行う場合を示す。ピーク値周波数Fpkは、周波数に応じた進み量Aがピークを示す周波数であり、位相進み補償で狙いの周波数に応じて設定される。狙いの周波数は、具体的には、PT共振周波数Fptである。このため、ピーク値周波数Fpkは、例えば、PT共振周波数Fptに設定される。進み量Apkは、ピーク値周波数Fpkに応じた進み量Aを示す。
曲線Cは、周波数に応じた進み量Aの一例を示す。周波数に応じた進み量Aは、位相進み補償の進み量Aであって、変速機4の入力軸のねじり振動の振動周波数に応じた進み量Aである。周波数に応じた進み量Aは、曲線Cのうち、例えばPT共振周波数Fptなど、ある周波数に対応する進み量Aと把握されてもよい。図3では、ゲインGとして曲線Cに対応するゲインを示す。
ここで、前後振動を抑制するにあたり、位相進み補償としては、ピーク値周波数Fpkにおける進み量Apkを固定して位相進み補償を行うことが考えられる。言い換えると、周波数に応じた進み量Aを、例えば曲線Cに固定して位相進み補償を行うことが考えられる。しかしながら、車両の運転状態によっては、進み量Aが足りずに十分な制振効果が得られない場合があった。その一方で、ピーク値周波数Fpkの進み量Apkが増加するほど、制振効果は大きくなる傾向がある。このため、周波数に応じた進み量Apkを車両の運転状態に応じて可変にすることが考えられる。ところが、進み量Apkを増加させるとゲインGも増加するため、進み量Apkを大きくしすぎると、後述する変速比制御系100が不安定になることが懸念される。また、変速比制御系100の安定性は、車両の運転状態によって異なる。
一方、進み量Apkを大きくしていくと、変速機コントローラ12の状態が変化した場合、進み量Apkが不適切となる場合がある。そこで、位相進み補償に加えて、位相遅れ補償を行うことが望ましい。しかしながら、車両の運転状態によっては、遅れ量Bが足りずに、PT共振由来の車両振動が起きることが懸念される。また、遅れ量Bが多すぎると、制御系が不安定になって低周波制御加振が起きるおそれがある。
そこで、変速機コントローラ12(以下、コントローラ12とも記載する。)は、以下で説明する変速制御を行う。以下では、変速機4の変速比としてバリエータ20の変速比Ratioを用いて説明する。変速比Ratioは、後述する実変速比Ratio_A,目標変速比Ratio_D及び到達変速比Ratio_Tを含むバリエータ20の変速比の総称である。
図4は、実施例の変速比制御系の要部を示す制御ブロック図である。変速比制御系100は、実変速制御値が目標変速制御値になるように変速機4の変速比制御を行うことで、変速機4のフィードバック変速制御を行う。変速比制御系100は、コントローラ12、アクチュエータ111、バリエータ20から構成される。
コントローラ12は、目標値生成部131と、FB補償器132と、位相補償オンオフ決定部133と、進み量決定部134と、進み量フィルタ部135と、第1位相進み補償器136と、第2位相進み補償器137と、第1スイッチ部138と、オンオフ指令フィルタ部139と、センサ値フィルタ部140と、第1ピーク値周波数決定部141と、遅れ量決定部142と、遅れ量フィルタ部143と、第2ピーク値周波数決定部144と、第1位相遅れ補償器145と、第2位相遅れ補償器146と、第2スイッチ部147と、PT共振検知部150と、油振検知部151と、発散検知部152と、を有する。FBは、フィードバックの略である。
目標値生成部131は、変速制御の目標値を生成する。目標値は、具体的には、変速比Ratioを変速制御値とした最終目標変速制御値である到達変速比Ratio_Tに基づく目標変速比Ratio_Dとされる。変速制御値は、例えば、制御パラメータとしてのプライマリ圧Ppriとしてもよい。到達変速比Ratio_Tは、変速マップで車両の運転状態に応じて予め設定されている。このため、目標値生成部131は、検出された運転状態に基づき、対応する到達変速比Ratio_Tを変速マップから読み出す。車両の運転状態は、具体的には、車速VSP及びアクセル開度APOを用いる。
目標値生成部131は、到達変速比Ratio_Tに基づき、目標変速比Ratio_Dを算出する。目標変速比Ratio_Dは、到達変速比Ratio_Tになるまでの間の過渡的な目標変速比であり、目標変速制御値を構成する。算出された目標変速比Ratio_Dは、FB補償器132に入力される。
FB補償器132は、変速比Ratioの実値である実変速比Ratio_A、目標変速比Ratio_Dに基づき、フィードバック指令値を算出する。フィードバック指令値は、例えば、実変速比Ratio_Aと目標変速比Ratio_Dの誤差を埋めるためのフィードバックプライマリ指示圧Ppri_FBである。FB補償器132では、FBゲインG_FBが可変とされる。FBゲインG_FBは、変速比制御系100で行う変速機4の変速比制御のFBゲインであり、車両の運転状態に応じて可変とされる。車両の運転状態は、例えば、変速比Ratio,変速比Ratioの変化率α,入力トルクTpri等である。変速比Ratioの変化率αは、言い換えると、変速速度である。FB補償器132で算出されたフィードバック指令値(フィードバックプライマリ指示圧Ppri_FB)は、進み量決定部134と、第1位相進み補償器136に入力される。
位相補償オンオフ決定部133は、フィードバックプライマリ指示圧Ppri_FBの位相進み補償及び位相遅れ補償のオンオフを決定する。位相補償オンオフ決定部133は、プーリ状態値Mと、後述する発散検知部152の指示値発散情報と、FBゲインG_FBと、後述する油振検知部151の油振検知情報と、後述するPT共振検知部150のPT共振情報と、目標変速比Ratio_Dと、に応じて、位相補償のオンオフを決定する。プーリ状態値Mは、プーリ21,22が、前後振動が発生する状態であるか否かを判定するための値であり、回転速度Npri,プーリ22への入力トルクTsec,変速比Ratio,及び変速比Ratioの変化率αを含む。入力トルクTsecは、例えばエンジン1及びプーリ22間に設定された変速比(第1ギヤ列3のギヤ比及びバリエータ20の変速比)をエンジントルクTeに乗じた値として算出することができる。変速比Ratioには、実変速比Ratio_A及び目標変速比Ratio_Dを適用することができる。変速比Ratioは、実変速比Ratio_Aまたは目標変速比Ratio_Dとしてもよい。
位相補償オンオフ決定部133は、具体的には、回転速度Npri,入力トルクTsec,変速比Ratio,及び変化率αの4つのパラメータすべてに応じて、フィードバックプライマリ指示圧Ppri_FBの位相進み補償及び位相遅れ補償のオンオフを決定する。位相補償オンオフ決定部133は、入力トルクTsec,変速比Ratio,及び変化率αのいずれかのパラメータに応じて、位相進み補償及び位相遅れ補償のオンオフを決定するように構成してもよい。位相補償オンオフ決定部133は、プーリ状態値Mに加えて、更にLUクラッチ2aの締結状態と、変速比4に対するドライバ操作の状態と、フェールの有無とに応じてフィードバックプライマリ指示圧Ppri_FBの位相補償のオンオフを決定する。
図5は、実施例の位相補償オンオフ決定部が行う処理を表すフローチャートである。ステップS1からステップS5までの処理は、パワートレインPTの共振が起きるか否かを判定する処理であり、言い換えると、変速機4の前後振動が発生するか否かを判定する処理である。以下では、パワートレインPTの共振をPT共振と記載する。
ステップS1では、プーリ状態値Mが、前後振動が発生する値であるか否かを判定する。ステップS1では、プーリ状態値Mである回転速度Npri,入力トルクTsec,変速比Ratio,及び変速比Ratioの変化率αそれぞれにつき、次の判定を行う。図6は、位相補償領域の説明図である。図6では、複数の動作点Mで動作点Mの分布を示す。位相補償領域Rは、回転速度Npri及びプーリ22への入力トルクTsecに応じて設定される。位相補償領域Rは、入力トルクTsecが所定トルクTsec1以上、かつ、回転速度Npriが所定回転速度Npri1以上の領域R2を更に含む。所定回転速度Npri1は、入力トルクTsecが大きくなるほど大きくなるように設定される。所定回転速度Npri1は、境界Bを規定するように設定される。境界Bは、入力トルクTsecに比例して回転速度Npriが増加する直線とされる。
所定トルクTsec1,所定回転速度Npri1は、前後振動が発生する入力トルクTsec及び回転速度Npriを規定するための値であり、実験等により予め設定することができる。位相補償領域Rは、コースト走行時にロードロードすなわち道路負荷に見合う開度でアクセルペダルが踏み込まれた場合の動作点Mを含む。動作点Mは、エンジン1のアイドル回転速度に対応する回転速度Npriよりも低い領域には分布しない。
境界Bで位相補償領域Rから区分された領域は、跳ね返り領域RXである。ここで、フィードバックプライマリ指示圧Ppri_FBに位相補償を施す前の指示圧をPpri_D1,位相補償後の指示圧をPpri_D2と定義する。跳ね返り領域RXでは、指示圧Ppri_D2を設定すると、指示圧が振動する結果、実圧Ppri_Aの振動が引き起こされることになる。このため、動作点Mが位相補償領域Rにない場合には、指示圧Ppri_D1を設定することで、変速比Ratioの安定性を不要に高めることが防止されるだけでなく、実圧Ppri_Aの振動の発生を防止する。
ところで、位相補償領域Rは、変速比Ratioが所定変速比Ratio1よりも大きい場合、言い換えると、変速比Ratioが所定変速比Ratio1よりもLow側の場合に対して設定される。所定変速比Ratio1は、前後振動が発生する変速比を規定するための値であり、例えば1である。所定変速比Ratio1は、実験等により予め設定することができる。
位相補償領域Rは、更に、変速比Ratioの変化率αが所定値α1よりも小さい場合に対して設定される。所定値α1は、前後振動が発生する変速比Ratioの変化率を規定するための値であり、具体的には変速比Ratioが定常状態であるか否かを判定する判定値として設定される。所定値α1は、実験等により予め設定することができる。位相補償領域Rは、更にLUクラッチ2aが締結されている場合に対して設定される。実施例では、位相補償領域Rそのものが、更に変速比Ratio,変化率α及びLUクラッチ2aの締結状態に応じて設定される形で設定される。動作点Mについても同様である。
図7は、動作点Mが位相補償領域内か否かを判定するフローチャートである。
ステップS11では、入力トルクTsecが所定トルクTsec1よりも小さいか否かを判定し、TsecがTsec1以上のときは、ステップS22に進み、TsecがTsec1よりも小さいときは、ステップS13に進む。
ステップS12では、回転速度Npriが所定回転速度Npri1よりも大きいか否かを判定し、大きい場合はステップS13に進み、NpriがNpri1以下の場合はステップS17に進む。
ステップS13では、変速比Ratioが所定変速比Ratio1よりも大きいか否かを判定する。具体的には、実変速比Ratio_A又は目標変速比Ratio_Dが、所定変速比Ratio1よりも大きいか否かを判定する。RatioがRatio1よりも大きいか否かは、例えばODスイッチ49がOFFであるか否かで判定することができる。実変速比Ratio_A、目標変速比Ratio_Dは、演算値であってもよい。ステップS13で大きいと判定された場合はステップS14に進み、それ以外の場合はステップS17に進む。
ステップS11では、入力トルクTsecが所定トルクTsec1よりも小さいか否かを判定し、TsecがTsec1以上のときは、ステップS22に進み、TsecがTsec1よりも小さいときは、ステップS13に進む。
ステップS12では、回転速度Npriが所定回転速度Npri1よりも大きいか否かを判定し、大きい場合はステップS13に進み、NpriがNpri1以下の場合はステップS17に進む。
ステップS13では、変速比Ratioが所定変速比Ratio1よりも大きいか否かを判定する。具体的には、実変速比Ratio_A又は目標変速比Ratio_Dが、所定変速比Ratio1よりも大きいか否かを判定する。RatioがRatio1よりも大きいか否かは、例えばODスイッチ49がOFFであるか否かで判定することができる。実変速比Ratio_A、目標変速比Ratio_Dは、演算値であってもよい。ステップS13で大きいと判定された場合はステップS14に進み、それ以外の場合はステップS17に進む。
ステップS14では、変化率αが所定値α1よりも小さいか否かを判定する。変化率αが所定値α1よりも小さいか否かは、例えばインヒビタスイッチ47の出力に基づき、セレクトレバーでマニュアルレンジがセレクトされているか否かなど、ドライバ操作によって変速比Ratioが固定される状態であるか否かで判定することができる。ステップS14で変化率αが所定値α1よりも小さいと判定された場合はステップS15に進み、それ以外の場合はステップS17に進む。
ステップS15では、LUクラッチ2aが締結されているか否かを判定する。LUクラッチ2aが締結されているか否かは、油圧センサ50の出力に基づき判定できる。LUクラッチ2aが締結されている場合はステップS16に進み、それ以外の場合はステップS17に進む。
ステップS16では、動作点Mが位相補償領域Rにあると判定する。
ステップS17では、動作点Mが位相補償領域Rに無いと判定する。言い換えると、動作点Mが跳ね返り領域RXにあると判定する。
ステップS15では、LUクラッチ2aが締結されているか否かを判定する。LUクラッチ2aが締結されているか否かは、油圧センサ50の出力に基づき判定できる。LUクラッチ2aが締結されている場合はステップS16に進み、それ以外の場合はステップS17に進む。
ステップS16では、動作点Mが位相補償領域Rにあると判定する。
ステップS17では、動作点Mが位相補償領域Rに無いと判定する。言い換えると、動作点Mが跳ね返り領域RXにあると判定する。
図5のステップS1では、これらのプーリ状態値M全てが前後振動発生値であると判定した場合は、ステップS2に進む。一方、これらのプーリ状態値Mのいずれかが前後振動発生値でないと判定した場合は、ステップS5に進み、PT共振ではないと判定する。したがって、前後振動は発生しないと判定してステップS10に進み、位相補償をオフにする。
ステップS2では、LUクラッチ2aが締結されているか否かを判定する。これにより、LUクラッチ2aの締結状態に応じて、位相補償のオンオフが決定される。LUクラッチ2aが解放されている場合は、前後振動は発生しないと判断してステップS5に進み、LUクラッチ2aが締結している場合は、前後振動が発生する状態であると判断してステップS3に進む。
ステップS3では、変速機4に対するドライバ操作の状態が所定状態であるか否かを判定し、変速比Ratioが所定変速比Ratio1よりも大きくなる第1操作状態、もしくは変速比Ratioが定常状態になる第2操作状態か否かを判定する。
第1操作状態とは、ODスイッチ49がOFFの状態である。第2操作状態は、セレクトレバーによってマニュアルレンジが選択されている状態や、スポーツモード等のマニュアルモードが選択されている状態など、ドライバ操作によって変速比Ratioが固定される状態である。ドライバ操作の状態が所定状態であるか否かを判定することで、変速比Ratioが所定変速比Ratio1よりも継続的に大きくなることや、変速比Ratio1が継続的に定常状態になることを判定することができる。よって、変速比Ratioが、前後振動が発生する状態であることを確実に判定する。ステップS3において、所定状態ではないと判定された場合はステップS5に進み、所定状態であると判定された場合はステップS4に進む。
第1操作状態とは、ODスイッチ49がOFFの状態である。第2操作状態は、セレクトレバーによってマニュアルレンジが選択されている状態や、スポーツモード等のマニュアルモードが選択されている状態など、ドライバ操作によって変速比Ratioが固定される状態である。ドライバ操作の状態が所定状態であるか否かを判定することで、変速比Ratioが所定変速比Ratio1よりも継続的に大きくなることや、変速比Ratio1が継続的に定常状態になることを判定することができる。よって、変速比Ratioが、前後振動が発生する状態であることを確実に判定する。ステップS3において、所定状態ではないと判定された場合はステップS5に進み、所定状態であると判定された場合はステップS4に進む。
ステップS4では、PT共振が起きると判定してステップS6に進む。ステップS6からステップS8では、位相補償をオンにできる状態か否かの判定が行われる。言い換えると、位相補償の実行の可否が判定される。
ステップS6では、フェールがあるか否かを判定する。フェールは、例えば、変速機4の変速制御に用いられる油圧制御回路11やセンサ・スイッチ類のフェールを含む変速機4に関するフェールである。尚、変速機4に関連する他の車両のフェールであってもよい。
ステップS6でフェールがあると判定した場合は、ステップS8に進んで位相補償の実行を禁止し、ステップS10に進んで位相補償をオフにする。一方、フェールが無いと判定した場合は、ステップS7に進んで位相補償の実行を許可し、ステップS9に進んで位相補償をオンにする。
ステップS6では、フェールがあるか否かを判定する。フェールは、例えば、変速機4の変速制御に用いられる油圧制御回路11やセンサ・スイッチ類のフェールを含む変速機4に関するフェールである。尚、変速機4に関連する他の車両のフェールであってもよい。
ステップS6でフェールがあると判定した場合は、ステップS8に進んで位相補償の実行を禁止し、ステップS10に進んで位相補償をオフにする。一方、フェールが無いと判定した場合は、ステップS7に進んで位相補償の実行を許可し、ステップS9に進んで位相補償をオンにする。
図4に戻り、位相補償オンオフ決定部133は、位相補償のオンを決定した場合はオン指令を出力し、位相補償のオフを決定した場合はオフ指令を出力する。オンオフ指令は、位相補償オンオフ決定部133から、進み量決定部134と、オンオフ指令フィルタ部139とに入力される。
進み量決定部134は、進み量Apkを決定する。進み量決定部134は、位相補償オンオフ決定部133の後流に設けられる。進み量決定部134は、信号経路における配置上、このように設けられる。進み量決定部134は、オンオフ指令に応じて、言い換えると、位相補償のオンオフ決定に応じて進み量Apkを決定する。進み量決定部134は、オフ指令が入力された場合に進み量Apkをゼロに決定する。進み量決定部134は、オン指令が入力された場合、車両の運転状態に応じて進み量Apkを決定する。進み量決定部134には、車両の運転状態を指標するパラメータとして、FBゲインG_FB,回転速度Npri,入力トルクTsec,変速比Ratio,セカンダリ圧Psec及び油温TMPが入力される。進み量決定部134は、これら複数のパラメータに応じて進み量Apkを決定する。言い換えると、車両の運転状態に応じて進み量Apkを可変にする。尚、進み量決定部134は、これら複数のパラメータのうち少なくともいずれかに応じて進み量Apkを可変としてもよい。
進み量決定部134は、各パラメータに応じて進み量Apkを決定することで、運転状態に応じて可変とすることができ、狙いの周波数での進み量Aを設定できる。尚、進み量Aを増加させる場合、バリエータ20など変速比制御系100の具体的仕様との関係を考慮し、安定的に動作可能な範囲に制限する。この制限は、各パラメータに応じた制限量として計算あるいは実験により予め求めることができる。進み量Apkは、実際には各パラメータに応じて決定した進み量Apkを各パラメータに応じて設定した制限量の分、更に減少させることで決定される。
進み量決定部134は、決定した進み量Apkをもとに第1進み量Apk1,第2進み量Apk2を決定する。第1進み量Apk1は、後述する一次の位相進み補償を行う場合に対応させて設定され、第2進み量Apk2は、後述する二次の位相進み補償を行う場合に対応させて設定される。第2進み量Apk2は、第1進み量Apk1の1/2とされる。各パラメータに応じて決定される進み量Apkは、第2進み量Apk2に対応するように設定される。各パラメータに応じて決定される進み量Apkは、第1進み量Apk1に対応するように設定されてもよい。進み量Apkは、進み量決定部134から進み量フィルタ部135に入力される。
進み量フィルタ部135は、進み量決定部134の後流に設けられ、進み量Apkのフィルタ処理を行う。進み量フィルタ部135は、信号経路における配置上、このように設けられる。進み量フィルタ部135は、具体的にはローパスフィルタ部とされ、例えば一次のローパスフィルタで構成される。進み量フィルタ部135は、進み量Apkのフィルタ処理を行うことで、進み補償のオンオフが切り替えられた際に、位相補償のオンオフの決定に応じた位相補償のゲインGの変化のなましを行うゲインなまし部を構成する。ゲインGの変化のなましを行うことで、位相補償のオンオフの切り替えに伴うゲインGの変化量の抑制が図られる。
第1位相進み補償器136と、第2位相進み補償器137と、第1スイッチ部138とには、進み量フィルタ部135から進み量Apkが入力される。第1位相進み補償器136と第2位相進み補償器137とには、第1ピーク値周波数決定部141からピーク値周波数Fpkも入力される。第1位相進み補償器136と第2位相進み補償器137とは共に入力された進み量Apk、更には入力されたピーク値周波数Fpkに基づき、フィードバックプライマリ指示圧Ppri_FBの一次の位相進み補償を行う。フィードバックプライマリ指示圧Ppri_FBの位相進み補償を行うことで、変速機4のフィードバック変速制御の位相進み補償が行われる。第1位相進み補償器136と第2位相進み補償器137とは、具体的には一次のフィルタで構成され、入力された進み量Apk、さらには入力されたピーク値周波数Fpkに応じたフィルタ処理を行うことで、フィードバックプライマリ指示圧Ppri_FBの一次の位相進み補償を行う。
第2位相進み補償器137は、第1位相進み補償器136と直列に設けられる。第2位相進み補償器137は、信号経路における配置上、このように設けられる。第2位相進み補償器137は、第1位相進み補償器136によって一次の位相進み補償が行われたフィードバックプライマリ指示圧Ppri_FBが入力される。したがって、第2位相進み補償器137は、フィードバックプライマリ指示圧Ppri_FBの一次の位相進み補償を行う場合、一次の位相進み補償を更に重ねて行う。これにより、フィードバックプライマリ指示圧Ppri_FBの二次の位相進み補償が行われる。第2位相進み補償器137は、第1位相進み補償器136と共に進み補償部を構成する。
第1スイッチ部138は、入力された進み量Apkに応じて第1位相進み補償器136と第2位相進み補償器137とで位相進み補償を行う場合、つまり二次の位相進み補償を行う場合と、第1位相進み補償器136のみで位相進み補償を行う場合、つまり一次の位相進み補償を行う場合とを切り替える。二次の位相進み補償を行うことで、一次の位相進み補償を行う場合と比較してゲインGの増大を抑制し、変速制御の不安定化を抑制できるためである。また、フィードバックプライマリ指示圧Ppri_FBに応じた一次の位相進み補償の進み量Aが所定値A1よりも小さい場合には、ゲイン抑制効果が望めない一方、一次の位相進み補償を行うことで、周波数ずれによってゲインGが低下し、制振効果が減少しやすくなる事態を回避できるためである。所定値A1は、位相進み補償の二次化によるゲイン抑制効果が得られる範囲内で、好ましくは最小値に設定することができる。
このように、位相進み補償を行うにあたり、進み量決定部134と第1スイッチ部138とは、具体的には次のように構成される。すなわち、進み量決定部134は、各パラメータに応じて決定した進み量Aが所定値A1よりも小さい場合に一次の位相進み補償を行うと判断し、進み量Apkを第1進み量Apk1に決定する。また、進み量決定部134は、進み量Aが所定値A1以上の場合に二次の位相進み補償を行うと判断し、進み量Apkを第2進み量Apk2に決定する。進み量Aは、マップデータ等で予め設定することができる。
第1スイッチ部138は、第1進み量Apk1が選択された場合に、第1位相進み補償器136のみで位相進み補償を行うように切り替えを行う。また、第1スイッチ部138は、第2進み量Apk2が選択された場合に、第1位相進み補償器136と第2位相進み補償器137とで位相進み補償を行うように切り替えを行う。このように構成することで、第1位相進み補償器136及び第2位相進み補償器137は、進み量Aが所定値A1よりも小さい場合に、第1位相進み補償器136のみで位相進み補償を行うように構成される。
第1スイッチ部138は、一次の位相進み補償を行う場合に、第2位相進み補償器137のみで位相進み補償を行うように構成されてもよい。進み量決定部134は、進み量Apkの代わりに進み量Aを第1スイッチ部138に入力してもよい。第1スイッチ部138は、このようにして入力された進み量Aに基づいて切り替えを行ってもよい。これにより、第1進み量Apk1や第2進み量Apk2になましが施されていても、一次、二次の位相進み補償を適切に行える。
第1スイッチ部138は、位相補償オンオフ決定部133とともに、プーリ状態値Mに応じて、第1位相進み補償器136及び第2位相進み補償器137の少なくともいずれかによって進み補償が行われたフィードバックプライマリ指示圧Ppri_FBをフィードバックプライマリ指示圧Ppri_FBとして設定する。第1位相進み補償器136及び第2位相進み補償器137の少なくともいずれかは、フィードバックプライマリ指示圧Ppri_FBの進み補償を行う進み補償部を構成する。進み補償が行われたフィードバックプライマリ指示圧Ppri_FBは、第1位相遅れ補償器145に出力される。
第1ピーク値周波数決定部141は、位相進み補償のピーク値周波数Fpk1を決定する。第1ピーク値周波数決定部141は、変速比Ratioに応じてピーク値周波数Fpk1を決定することで、ピーク値周波数Fpk1を変化させる。変速比Ratioは、具体的には、目標変速比Ratio_Dが目標値生成部131から入力される。第1ピーク値周波数決定部141が決定したピーク値周波数Fpk1は、第1位相進み補償器136及び第2位相進み補償器137それぞれに入力される。これにより、第1ピーク値周波数決定部141は、変速比Ratioに基づき、第1位相進み補償器136及び第2位相進み補償器137が行う位相進み補償それぞれのピーク値周波数Fpkを設定するように構成される。
遅れ量決定部142は、遅れ量Bpkを決定する。遅れ量決定部142は、位相補償オンオフ決定部133の後流に設けられる。遅れ量決定部142は、信号経路における配置上、このように設けられる。遅れ量決定部142は、オンオフ指令に応じて、言い換えると、位相補償のオンオフ決定に応じて遅れ量Bpkを決定する。遅れ量決定部142は、オフ指令が入力された場合に遅れ量Bpkをゼロに決定する。遅れ量決定部142は、オン指令が入力された場合、車両の運転状態に応じて遅れ量Bpkを決定する。遅れ量決定部142には、車両の運転状態を指標するパラメータとして、FBゲインG_FB,回転速度Npri,入力トルクTsec,変速比Ratio,セカンダリ圧Psec,車両加速度,ブレーキ操作状態,プライマリ圧Ppri,エンジントルク,トルクコンバータのトルク比,LUクラッチ2aの締結状態,油温TMP等が入力される。遅れ量決定部142は、これら複数のパラメータに応じて進み量Bpkを決定する。言い換えると、車両の運転状態に応じて進み量Bpkを可変にする。尚、遅れ量決定部142は、これら複数のパラメータのうち少なくともいずれかに応じて遅れ量Bpkを可変としてもよい。
遅れ量決定部142は、図示しない設定に基づき、各パラメータに応じて遅れ量Bpkを決定することで、運転状態に応じて可変とすることができ、狙いの周波数での遅れ量Bを設定できる。尚、遅れ量Bを増加させる場合、バリエータ20など変速比制御系100の具体的仕様との関係を考慮し、安定的に動作可能な範囲に制限する。この制限は、各パラメータに応じた制限量として計算あるいは実験により予め求めることができる。遅れ量Bpkは、実際には各パラメータに応じて決定した遅れ量Bpkを各パラメータに応じて設定した制限量の分、更に減少させることで決定される。
遅れ量決定部142は、決定した遅れ量Bpkをもとに第1遅れ量Bpk1,第2遅れ量Bpk2を決定する。第1遅れ量Bpk1は、後述する一次の位相遅れ補償を行う場合に対応させて設定され、第2遅れ量Bpk2は、後述する二次の位相遅れ補償を行う場合に対応させて設定される。第2遅れ量Bpk2は、第1遅れ量Bpk1の1/2とされる。各パラメータに応じて決定される遅れ量Bpkは、第2遅れ量Bpk2に対応するように設定される。各パラメータに応じて決定される遅れ量Bpkは、第1遅れ量Bpk1に対応するように設定されてもよい。遅れ量Bpkは、遅れ量決定部142から遅れ量フィルタ部143に入力される。
遅れ量フィルタ部143は、遅れ量決定部142の後流に設けられ、遅れ量Bpkのフィルタ処理を行う。遅れ量フィルタ部143は、信号経路における配置上、このように設けられる。遅れ量フィルタ部143は、具体的にはローパスフィルタ部とされ、例えば一次のローパスフィルタで構成される。遅れ量フィルタ部143は、遅れ量Bpkのフィルタ処理を行うことで、位相補償のオンオフが切り替えられた際に、位相補償のオンオフの決定に応じた位相遅れ補償のゲインの変化のなましを行うゲインなまし部を構成する。ゲインの変化のなましを行うことで、位相補償のオンオフの切り替えに伴うゲインの変化量の抑制が図られる。
第2ピーク値周波数決定部144は、位相遅れ補償のピーク値周波数Fpk2を決定する。第2ピーク値周波数決定部144は、変速比Ratioに応じてピーク値周波数Fpk2を決定することで、ピーク値周波数Fpk2を変化させる。変速比Ratioは、具体的には、目標変速比Ratio_Dが目標値生成部131から入力される。第2ピーク値周波数決定部144が決定したピーク値周波数Fpk2は、第1位相遅れ補償器145及び第2位相遅れ補償器146それぞれに入力される。これにより、第2ピーク値周波数決定部144は、変速比Ratioに基づき、第1位相遅れ補償器145及び第2位相遅れ補償器146が行う位相進み補償それぞれのピーク値周波数Fpk2を設定するように構成される。
第1位相遅れ補償器145と、第2位相遅れ補償器146と、第2スイッチ部147とには、遅れ量フィルタ部143から遅れ量Bpkが入力される。第1位相遅れ補償器145と第2位相遅れ補償器146とには、第2ピーク値周波数決定部144からピーク値周波数Fpk2も入力される。第1位相遅れ補償器145と第2位相遅れ補償器146とは共に入力された遅れ量Bpk、更には入力されたピーク値周波数Fpk2に基づき、フィードバックプライマリ指示圧Ppri_FBの一次の位相遅れ補償を行う。フィードバックプライマリ指示圧Ppri_FBの位相遅れ補償を行うことで、変速機4のフィードバック変速制御の位相遅れ補償が行われる。第1位相遅償器145と第2位相遅れ補償器146とは、具体的には一次のフィルタで構成され、入力された遅れ量Bpk、さらには入力されたピーク値周波数Fpk2に応じたフィルタ処理を行うことで、フィードバックプライマリ指示圧Ppri_FBの一次の位相遅れ補償を行う。
第2位相遅れ補償器146は、第1位相遅れ補償器145と直列に設けられる。第2位相遅れ補償器146は、信号経路における配置上、このように設けられる。第2位相遅れ補償器146は、第1位相遅れ補償器145によって一次の位相遅れ補償が行われたフィードバックプライマリ指示圧Ppri_FBが入力される。したがって、第2位相遅れ補償器146は、フィードバックプライマリ指示圧Ppri_FBの一次の位相遅れ補償を行う場合、一次の位相遅れ補償を更に重ねて行う。これにより、フィードバックプライマリ指示圧Ppri_FBの二次の位相遅れ補償が行われる。第2位相遅れ補償器146は、第1位相遅れ補償器146と共に遅れ補償部を構成する。
第2スイッチ部147は、入力された遅れ量Bpkに応じて第1位相遅れ補償器145と第2位相遅れ補償器146とで位相遅れ補償を行う場合、つまり二次の位相遅れ補償を行う場合と、第1位相遅れ補償器145のみで位相遅れ補償を行う場合、つまり一次の位相遅れ補償を行う場合とを切り替える。二次の位相遅れ補償を行うことで、一次の位相遅れ補償を行う場合と比較して、遅れ量が影響する範囲を狭くすることができる。よって、ピーク周波数Fpk2を低くする必要が無く、すぐに安定限界に達することを回避できる。また、フィードバックプライマリ指示圧Ppri_FBに応じた一次の位相遅れ補償の進み量Bが所定値B1よりも小さい場合には、第1位相遅れ補償器145のみで位相遅れ補償を行い、進み量Bが所定値B1以上のときは、第2位相遅れ補償器を用いて二次の位相遅れ補償を行う。
このように、位相遅れ補償を行うにあたり、遅れ量決定部142と第2スイッチ部147とは、具体的には次のように構成される。すなわち、遅れ量決定部142は、各パラメータに応じて決定した遅れ量Bが所定値B1よりも小さい場合に一次の位相遅れ補償を行うと判断し、遅れ量Bpkを第1遅れ量Bpk1に決定する。また、遅れ量決定部142は、遅れ量Bが所定値B1以上の場合に二次の位相遅れ補償を行うと判断し、遅れ量Bpkを第2遅れ量Bpk2に決定する。遅れ量Bは、マップデータ等で予め設定することができる。
第2スイッチ部147は、第1遅れ量Bpk1が選択された場合に、第1位相遅れ補償器145のみで位相遅れ補償を行うように切り替えを行う。また、第2スイッチ部147は、第2遅れ量Bpk2が選択された場合に、第1位相遅れ補償器145と第2位相遅れ補償器146とで位相遅れ補償を行うように切り替えを行う。このように構成することで、第1位相遅れ補償器145及び第2位相遅れ補償器146は、遅れ量Bが所定値B1よりも小さい場合に、第1位相遅れ補償器145のみで位相遅れ補償を行うように構成される。すなわち、位相遅れ補償器の遅れ量が増えれば増えるほど、ピーク周波数のすそ野の位相遅れを低減できる。そのため、制御加振が起こる低周波の位相遅れが解消されるため、制御加振が起こりにくくなる。しかし、例えば遅れ量が40degを超えたあたりから、高周波ゲインを下げる量が減少し、ロバスト性が低下する。よって、40degを下回る遅れ量の場合は、二次化によるデメリットが強くなるため、第1位相遅れ補償器145のみを使用する。
第2スイッチ部147は、一次の位相遅れ補償を行う場合に、第2位相遅れ補償器146のみで位相遅れ補償を行うように構成されてもよい。遅れ量決定部142は、遅れ量Bpkの代わりに遅れ量Bを第2スイッチ部147に入力してもよい。第2スイッチ部147は、このようにして入力された遅れ量Bに基づいて切り替えを行ってもよい。これにより、第1遅れ量Bpk1や第2遅れ量Bpk2になましが施されていても、一次、二次の位相遅れ補償を適切に行える。
第2スイッチ部147は、位相補償オンオフ決定部133とともに、プーリ状態値Mに応じて、第1位相遅れ補償器136及び第2位相遅れ補償器137の少なくともいずれかによって遅れ補償が行われたフィードバックプライマリ指示圧Ppri_FBをフィードバックプライマリ指示圧Ppri_FBのとして設定する設定部を構成する。第1位相遅れ補償器136及び第2位相遅れ補償器137の少なくともいずれかは、フィードバックプライマリ指示圧Ppri_FBの遅れ補償を行う遅れ補償部を構成する。遅れ補償が行われたフィードバックプライマリ指示圧Ppri_FBは、補償後のフィードバック指令値を構成する。
アクチュエータ111には、第1スイッチ部138から選択されたフィードバックプライマリ指示圧Ppri_FBと、目標変速比Ratio_Dに基づいて設定された図示しないプライマリ指示圧Ppri_FF(バランス推力や変速比を決定する目標プライマリ指示圧)が入力される。アクチュエータ111は、例えば、油圧制御回路11に設けられたプライマリ圧Ppriを制御するプライマリ圧制御弁であり、プライマリ圧Ppriの実圧Ppri_Aが目標変速比Ratio_Dに応じた指示圧Ppri_Dになるようにプライマリ圧Ppriを制御する。これにより、実変速比Ratio_Aが目標変速比Ratio_Dになるように変速比Ratioが制御される。
センサ部40は、バリエータ20の実変速比Ratio_Aを検出する。センサ部40は、具体的には、回転速度センサ42及び回転速度センサ43で構成されている。センサ部40が検出した変速比の実値(センサ値)である実変速比Ratio_Aは、センサ値フィルタ部140に入力される。センサ値フィルタ部140には、オンオフ指令フィルタ部139を介してオンオフ指令も入力される。オンオフ指令フィルタ部139は、進み補償がオンになる場合に、オン指令をセンサ値フィルタ部140に出力し、進み補償がオフになる場合に、オフ指令をセンサ値フィルタ部140に出力し、進み補償がオフになる場合、オフ指令をセンサ値フィルタ部140に出力する。オンオフ指令フィルタ部139は省略されてもよい。
センサ値フィルタ部140は、実変速比Ratio_Aのフィルタ処理を行う。センサ値フィルタ部140では、オンオフ指令に応じてフィルタ処理の態様が変更される。具体的には、センサ値フィルタ部140では、オンオフ指令に応じてフィルタ処理の次数又は実行・停止が切り替えられる。センサ値フィルタ部140は、オフ指令が入力された場合に、一次のローパスフィルタとされ、オン指令が入力された場合に高次のローパスフィルタとされるか、或いはフィルタ処理を停止する。
このように、センサ値フィルタ部140を構成することで、一次のローパスフィルタを用いると、除去したい周波数以下の領域で僅かな遅れが発生することに対し、オン指令が入力された場合には、遅れが改善される。結果、フィードバックプライマリ指示圧Ppri_FBの位相を更に進めることができる。センサ値フィルタ部140は、例えば、フィルタ処理の実行・停止又は次数を切り替え可能に設けられた1又は複数の一次のローパスフィルタを有した構成とすることができる。センサ値フィルタ部140からの実変速比Ratio_Aは、FB補償器132に入力される。
PT共振検知部150では、Gセンサ53により検出された前後加速度Gの振動成分を抽出し、振動成分の振幅が所定値以上の状態が所定時間以上継続した場合、振動が発生していると判断する。一方、振動成分の振幅が所定値未満の状態が所定時間以上継続した場合には、振動が発生していないと判断する。
油振検知部151では、まず、油圧センサ52により検出された電圧信号を油圧信号に変換し、バンドパスフィルタ処理によってDC成分(制御指令に応じた変動成分)を除去し、振動成分のみを抽出する。そして、振動成分の振幅を算出し、油圧信号の振幅が所定振幅以上の状態が所定時間以上継続した場合には、油振が発生していると判断する。一方、油振が発生しているときに、振幅が所定振幅未満の状態が所定時間以上継続した場合には、油振が発生していないと判断する。尚、油圧信号としてプライマリプーリ油圧を用いてもよいし、両方を用いてもよい。
発散検知部152では、最終的な指令信号が発散しているか否かを検知する。ここで、指令信号の発散は、周波数が所定値以上で、かつ、振幅が所定値以上の状態が所定時間継続したか否かに基づいて検知する。
以上説明したように、実施例にあっては、下記の作用効果が得られる。
(1)実圧Ppri_Aが指示圧Ppri_Dになるように変速機4の変速制御を行う無段変速機の制御装置であって、指示圧Ppri_Dの進み補償を行う第1位相進み補償器136及び第2位相進み補償器137と、指示圧Ppri_Dの遅れ補償を行う第1位相遅れ補償器145及び第2位相遅れ補償器146と、回転速度Npri、入力トルクTsec、変速比Ratio、及び変化率αのうち少なくともいずれかに応じて、第1位相進み補償器136,第2位相進み補償器137,第1位相遅れ補償器145,第2位相遅れ補償器146によって補償が行われた指示圧Ppri_D2を指示圧Ppri_Dとして設定する位相補償オンオフ決定部133(設定部)と、を有する。
よって、前後振動が発生する領域で指示圧Ppri_D2を指示圧Ppri_Dとして設定することができる。このため、指示圧Ppri_Dの位相補償による変速比Ratioの安定性向上を必要に応じて図ることができ、前後振動の収束を図ることで、変速機4の前後振動を適切に改善できる。また、位相補償によって変速比Ratioの安定性を高めるため、変速比Ratioの制御応答性の向上も図ることができる。さらに、変速比Ratioの安定性を高める必要が無い場合に、実圧Ppri_Aの振動が発生することを防止できる。
また、センサ値フィルタ部140では、フィルタ処理を行うとともに、高次のローパスフィルタを構成する。よって、一次のローパスフィルタを用いると除去したい周波数以下の領域で僅かな遅れが発生することに対し、遅れを改善することができ、これにより指示圧Ppri_Dの位相を更に進めることができる。
(1)実圧Ppri_Aが指示圧Ppri_Dになるように変速機4の変速制御を行う無段変速機の制御装置であって、指示圧Ppri_Dの進み補償を行う第1位相進み補償器136及び第2位相進み補償器137と、指示圧Ppri_Dの遅れ補償を行う第1位相遅れ補償器145及び第2位相遅れ補償器146と、回転速度Npri、入力トルクTsec、変速比Ratio、及び変化率αのうち少なくともいずれかに応じて、第1位相進み補償器136,第2位相進み補償器137,第1位相遅れ補償器145,第2位相遅れ補償器146によって補償が行われた指示圧Ppri_D2を指示圧Ppri_Dとして設定する位相補償オンオフ決定部133(設定部)と、を有する。
よって、前後振動が発生する領域で指示圧Ppri_D2を指示圧Ppri_Dとして設定することができる。このため、指示圧Ppri_Dの位相補償による変速比Ratioの安定性向上を必要に応じて図ることができ、前後振動の収束を図ることで、変速機4の前後振動を適切に改善できる。また、位相補償によって変速比Ratioの安定性を高めるため、変速比Ratioの制御応答性の向上も図ることができる。さらに、変速比Ratioの安定性を高める必要が無い場合に、実圧Ppri_Aの振動が発生することを防止できる。
また、センサ値フィルタ部140では、フィルタ処理を行うとともに、高次のローパスフィルタを構成する。よって、一次のローパスフィルタを用いると除去したい周波数以下の領域で僅かな遅れが発生することに対し、遅れを改善することができ、これにより指示圧Ppri_Dの位相を更に進めることができる。
(2)位相補償オンオフ決定部133は、回転速度Npri及び入力トルクTsecに応じた動作点Mが、回転速度Npri及び入力トルクTsecに応じて設定された位相補償領域Rにある場合に、指示圧Ppri_D2(補償後目標変速制御値)を指示圧Ppri_D(目標変速制御値)として設定する。よって、回転速度Npri及び入力トルクTsecに応じた領域のうち、前後振動が発生する領域を位相補償領域Rとして変速比Ratioの安定性を高めることで、前後振動を適切に改善できる。
(3)位相補償領域Rは、入力トルクTsecが所定トルクTsec1よりも小さい領域を含む。よって、位相補償領域Rを適切に設定できる。
(4)位相補償領域Rは、入力トルクTsecが所定トルクTsec1以上、かつ、回転速度Npriが所定回転速度Npri1以上の領域R2をさらに含む。所定回転速度Npri1は、入力トルクTsecが大きくなるほど大きくなるように設定される。よって、位相補償領域Rを更に適切に設定できる。
(5)位相補償オンオフ決定部133は、変速比Ratioが所定変速比Ratio1よりも大きい場合に、指示圧Ppri_D2を指示圧Ppri_Dとして設定する。これにより、変速比Ratioに応じて前後振動を適切に改善できる。
(6)位相補償オンオフ決定部133は、変化率αが所定値よりも小さい場合に、指示圧Ppri_D2を指示圧Ppri_Dとして設定する。これにより、変化率αに応じて前後振動を適切に改善できる。
(7)変速機4は、LUクラッチ2a付きのトルクコンバータ2を介して動力が入力される。そして、位相補償オンオフ決定部133は、さらにLUクラッチ2aが締結されている場合に、指示圧Ppri_D2を指示圧Ppri_Dとして設定する。これにより、LUクラッチ2aの締結状態に応じて前後振動を適切に改善できる。
[他の実施例]
以上、本発明を実施するための形態を実施例に基づいて説明したが、本発明の具体的な構成は実施例に示した構成に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
例えば、実施例では、位相補償オンオフ決定部133が、回転速度Npri1、入力トルクTsec、変速比Ratio、及び変化率αの4つのパラメータすべてに応じて、指示圧Ppri_D2を指示圧Ppri_Dとして設定する場合について説明した。これに対し、上記4つのパラメータの少なくともいずれかのパラメータに応じて指示圧Ppri_D2を指示圧Ppri_Dとして設定するように構成してもよい。この場合でも、いずれかのパラメータとの関係で変速比Ratioの安定性を適切に高めることで、前後振動を適切に改善できる。また、位相補償領域Rそのものが、変速比Ratio、変化率α及びLUクラッチ2aの締結状態に応じて設定される場合について説明した。これに対し、例えば動作点Mが位相補償領域Rにあるか否かの判定に、変速比Ratio、変化率α、LUクラッチ2aの締結状態についての判定を含めずに、別の判定として行うように構成されてもよい。また、位相補償領域Rの内外判定を位相補償オンオフ決定部133で行う場合について説明したが、第1スイッチ部138や第2スイッチ部147で判定するように構成してもよい。また、実施例では、変速機コントローラ12内で上記制御が構成される例について示したが、複数のコントローラで実現してもよい。
以上、本発明を実施するための形態を実施例に基づいて説明したが、本発明の具体的な構成は実施例に示した構成に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
例えば、実施例では、位相補償オンオフ決定部133が、回転速度Npri1、入力トルクTsec、変速比Ratio、及び変化率αの4つのパラメータすべてに応じて、指示圧Ppri_D2を指示圧Ppri_Dとして設定する場合について説明した。これに対し、上記4つのパラメータの少なくともいずれかのパラメータに応じて指示圧Ppri_D2を指示圧Ppri_Dとして設定するように構成してもよい。この場合でも、いずれかのパラメータとの関係で変速比Ratioの安定性を適切に高めることで、前後振動を適切に改善できる。また、位相補償領域Rそのものが、変速比Ratio、変化率α及びLUクラッチ2aの締結状態に応じて設定される場合について説明した。これに対し、例えば動作点Mが位相補償領域Rにあるか否かの判定に、変速比Ratio、変化率α、LUクラッチ2aの締結状態についての判定を含めずに、別の判定として行うように構成されてもよい。また、位相補償領域Rの内外判定を位相補償オンオフ決定部133で行う場合について説明したが、第1スイッチ部138や第2スイッチ部147で判定するように構成してもよい。また、実施例では、変速機コントローラ12内で上記制御が構成される例について示したが、複数のコントローラで実現してもよい。
Claims (8)
- 実変速制御値が目標変速制御値になるように無段変速機の変速制御を行う無段変速機の制御装置であって、
前記目標変速制御値の進み補償を行う進み補償部と、
前記目標変速制御値の遅れ補償を行う遅れ補償部と、
前記無段変速機の入力側回転速度、前記無段変速機の従動側回転要素への入力トルク、前記無段変速機の変速比及び変速比の変化率のうち少なくともいずれかに応じて、前記進み補償部及び/又は前記遅れ補償部によって補償が行われた補償後目標変速制御値を前記目標変速制御値として設定する設定部と、
を有する、無段変速機の制御装置。 - 請求項1に記載の無段変速機の制御装置において、
前記設定部は、前記入力側回転速度及び前記入力トルクに応じた動作点が、前記入力側回転速度及び前記入力トルクに応じて設定された補償領域にある場合に、前記補償後目標変速制御値を前記目標変速制御値として設定する、無段変速機の制御装置。 - 請求項2に記載の無段変速機の制御装置において、
前記補償領域は、前記入力トルクが所定トルクよりも小さい領域を含む、無段変速機の制御装置。 - 請求項3に記載の無段変速機の制御装置において、
前記補償領域は、前記入力トルクが前記所定トルク以上、かつ前記入力側回転速度が所定回転速度以上の領域をさらに含み、
前記所定回転速度は、前記入力トルクが大きくなるほど大きくなるように設定される、無段変速機の制御装置。 - 請求項1に記載の無段変速機の制御装置において、
前記設定部は、前記変速比が所定変速比よりも大きい場合に、前記補償後目標変速制御値を前記目標変速制御値として設定する、無段変速機の制御装置。 - 請求項1又は2に記載の無段変速機の制御装置において、
前記設定部は、前記変化率が所定値よりも小さい場合に、前記補償後目標変速制御値を前記目標変速制御値として設定する、無段変速機の制御装置。 - 請求項1又は2に記載の無段変速機の制御装置において、
前記無段変速機は、ロックアップクラッチ付きのトルクコンバータを介して動力が入力され、
前記設定部は、さらに前記ロックアップクラッチが締結されている場合に、前記補償後目標変速制御値を前記目標変速制御値として設定する、無段変速機の制御装置。 - 実変速制御値が目標変速制御値になるように無段変速機の変速制御を行う無段変速機の制御方法であって、
前記無段変速機の入力側回転速度、前記無段変速機の従動側回転要素への入力トルク、前記無段変速機の変速比及び変速比の変化率のうち少なくともいずれかに応じて、パワートレインの共振周波数での前後振動が発生する条件であるか否かを判定し、
前記前後運動が発生する条件であると判定したときには、前記目標変速制御値の進み補償及び/又は遅れ補償を行って、補償後目標変速制御値を前記目標変速制御値として設定する、
無段変速機の制御方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019542055A JP6831470B2 (ja) | 2017-09-15 | 2018-09-11 | 無段変速機の制御装置および制御方法 |
| CN201880059487.7A CN111108309B (zh) | 2017-09-15 | 2018-09-11 | 无级变速器的控制装置以及控制方法 |
| US16/639,941 US11067172B2 (en) | 2017-09-15 | 2018-09-11 | Control device and control method for continuously variable transmission |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017178270 | 2017-09-15 | ||
| JP2017-178270 | 2017-09-15 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019054354A1 true WO2019054354A1 (ja) | 2019-03-21 |
Family
ID=65722697
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/033560 WO2019054354A1 (ja) | 2017-09-15 | 2018-09-11 | 無段変速機の制御装置および制御方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11067172B2 (ja) |
| JP (1) | JP6831470B2 (ja) |
| CN (1) | CN111108309B (ja) |
| WO (1) | WO2019054354A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019054229A1 (ja) * | 2017-09-15 | 2019-03-21 | ジヤトコ株式会社 | 無段変速機の制御装置および制御方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11194801A (ja) * | 1997-02-27 | 1999-07-21 | Denso Corp | システム制御装置 |
| JP2011207240A (ja) * | 2010-03-26 | 2011-10-20 | Toyota Motor Corp | 車両制御システム |
| JP2017160982A (ja) * | 2016-03-09 | 2017-09-14 | ジヤトコ株式会社 | 無段変速機の制御装置及び無段変速機の制御方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3358419B2 (ja) * | 1996-01-31 | 2002-12-16 | 日産自動車株式会社 | 無段自動変速機の変速制御装置 |
| JP3942005B2 (ja) | 2000-09-29 | 2007-07-11 | ジヤトコ株式会社 | 無段変速機の変速制御装置 |
| JP4452228B2 (ja) * | 2005-10-04 | 2010-04-21 | ジヤトコ株式会社 | 無段変速機のライン圧制御装置 |
| JP2008001131A (ja) * | 2006-06-20 | 2008-01-10 | Nissan Motor Co Ltd | 車両の駆動力制御装置 |
| JP5762261B2 (ja) * | 2011-11-26 | 2015-08-12 | ジヤトコ株式会社 | 無段変速機の変速制御装置 |
| JP6304094B2 (ja) * | 2015-03-26 | 2018-04-04 | トヨタ自動車株式会社 | ロックアップクラッチの制御装置 |
| JP6792969B2 (ja) | 2016-07-07 | 2020-12-02 | 株式会社クラレ | 二酸化炭素分離装置 |
-
2018
- 2018-09-11 JP JP2019542055A patent/JP6831470B2/ja active Active
- 2018-09-11 US US16/639,941 patent/US11067172B2/en active Active
- 2018-09-11 WO PCT/JP2018/033560 patent/WO2019054354A1/ja active Application Filing
- 2018-09-11 CN CN201880059487.7A patent/CN111108309B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11194801A (ja) * | 1997-02-27 | 1999-07-21 | Denso Corp | システム制御装置 |
| JP2011207240A (ja) * | 2010-03-26 | 2011-10-20 | Toyota Motor Corp | 車両制御システム |
| JP2017160982A (ja) * | 2016-03-09 | 2017-09-14 | ジヤトコ株式会社 | 無段変速機の制御装置及び無段変速機の制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6831470B2 (ja) | 2021-02-17 |
| CN111108309A (zh) | 2020-05-05 |
| US11067172B2 (en) | 2021-07-20 |
| US20200248801A1 (en) | 2020-08-06 |
| CN111108309B (zh) | 2021-08-17 |
| JPWO2019054354A1 (ja) | 2020-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6666756B2 (ja) | 無段変速機の制御装置及び無段変速機の制御方法 | |
| JP6655166B2 (ja) | 無段変速機の制御装置及び無段変速機の制御方法 | |
| JP6731057B2 (ja) | 無段変速機の制御方法 | |
| JP6637800B2 (ja) | 無段変速機の制御装置及び無段変速機の制御方法 | |
| WO2019054354A1 (ja) | 無段変速機の制御装置および制御方法 | |
| JP6714171B2 (ja) | 無段変速機の制御装置および制御方法 | |
| JP2017211008A (ja) | 無段変速機の制御方法 | |
| JP6742530B2 (ja) | 無段変速機の制御装置および制御方法 | |
| WO2019054356A1 (ja) | 無段変速機の制御装置および制御方法 | |
| WO2019176417A1 (ja) | 無段変速機の制御装置および制御方法 | |
| JP6896343B2 (ja) | 無段変速機の制御装置 | |
| WO2017159268A1 (ja) | 無段変速機の制御装置及び無段変速機の制御方法 | |
| JP2019052730A (ja) | 無段変速機の制御装置 | |
| JP2019052729A (ja) | 無段変速機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18855487 Country of ref document: EP Kind code of ref document: A1 |
|
| DPE2 | Request for preliminary examination filed before expiration of 19th month from priority date (pct application filed from 20040101) | ||
| ENP | Entry into the national phase |
Ref document number: 2019542055 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18855487 Country of ref document: EP Kind code of ref document: A1 |