WO2019053814A1 - 作業機械 - Google Patents
作業機械 Download PDFInfo
- Publication number
- WO2019053814A1 WO2019053814A1 PCT/JP2017/033077 JP2017033077W WO2019053814A1 WO 2019053814 A1 WO2019053814 A1 WO 2019053814A1 JP 2017033077 W JP2017033077 W JP 2017033077W WO 2019053814 A1 WO2019053814 A1 WO 2019053814A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- speed
- arm
- calculated
- hydraulic
- velocity
- Prior art date
Links
Images

















Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/2033—Limiting the movement of frames or implements, e.g. to avoid collision between implements and the cabin
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
- E02F9/2207—Arrangements for controlling the attitude of actuators, e.g. speed, floating function for reducing or compensating oscillations
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2271—Actuators and supports therefor and protection therefor
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
Definitions
- the present invention relates to a working machine that controls at least one of a plurality of hydraulic actuators according to predetermined conditions when operating an operating device.
- Machine Control is a technology for improving the working efficiency of a working machine (for example, a hydraulic shovel) including a working device (for example, a front working device) driven by a hydraulic actuator.
- the MC is a technology for assisting the operator's operation by executing semi-automatic control to operate the working device according to a predetermined condition when the operation device is operated by the operator.
- Japanese Patent No. 5865510 discloses a technique for MC of a front work device to move a blade edge of a bucket along a reference surface.
- the estimated speed of the arm cylinder is calculated based on the operating amount of the arm operating lever due to the fall of the weight of the bucket depending on the posture of the front work device.
- the blade tip of the bucket may not be stabilized and hunting may occur.
- the viscosity of the working oil is increased when the working machine oil is low temperature, but the actual arm cylinder speed in this case may be slower than the speed estimated from the lever operation amount.
- FIG. 14 shows an opening area characteristic of an open center bypass type spool of a hydraulic system used for a working machine.
- the opening area of the open center bypass type spool is the center bypass opening of the flow passage for flowing pressure oil from the pump into the tank, the meter-in opening of the flow passage for supplying pressure oil from the pump to the actuator, and the flow passage from the actuator to the tank There is a meter out opening.
- SX be the closing point of the center bypass opening.
- the arm cylinder In the lifting operation, the arm cylinder is driven in the lifting direction with respect to the weight of the front work device, so the pressure on the meter in side is increased by the weight of the front work device. If the operation amount of the arm control lever is small and the stroke amount of the spool is less than SX, pressure oil supplied from the pump is supplied to the arm cylinder through the meter-in opening because the center bypass opening is open, It divides into what flows into a tank through a bypass opening.
- the pressure oil tends to flow in the direction of light load, when driving the arm cylinder in the lifting direction with respect to the weight of the front work device, when the arm cylinder is not driven in the lifting direction with respect to the weight of the front work device Compared with the above, the load on the arm cylinder is large and the pressure oil does not easily flow to the arm cylinder. As a result, the arm cylinder speed decreases.
- the actual arm cylinder speed may differ from the speed estimated from the lever operation amount depending on the state of the work machine and the work content, and as a result, the blade edge of the bucket at the time of MC (tip of work device) May become unstable and cause hunting.
- a working machine that performs such MC is provided with a posture sensor (for example, a potentiometer provided on a pin that connects an arm and a boom) for detecting the posture of the working device.
- a posture sensor for example, a potentiometer provided on a pin that connects an arm and a boom
- the arm cylinder speed calculated from the lever operation amount does not fall within the range of the estimated value, but the output of the attitude sensor can be used to understand the actual attitude of the working device, and the arm cylinder calculated from the time change of the output value of the attitude sensor The speed is steadily closer to the actual speed than that calculated from the lever operation amount. Therefore, it is conceivable to perform MC based on the arm cylinder speed calculated from the output value of the attitude sensor.
- the posture sensor can detect the posture change only after the arm actually starts moving, if MC based on the arm velocity calculated from the output of the posture sensor is executed from the start of the movement of the arm, the actual arm
- the response of the MC for example, a boom raising command
- the blade tip position of the bucket may not be stabilized and hunting may occur.
- An object of the present invention is to provide a working machine in which the speed of a specific hydraulic actuator for driving a working device can be calculated more appropriately, and the behavior of the tip of the working device (for example, the bucket blade edge) in MC is stabilized.
- the present application includes a plurality of means for solving the above problems, for example, a working device having a plurality of front members, a plurality of hydraulic actuators for driving the plurality of front members, and an operator's operation
- the operation device for instructing the operation of the plurality of hydraulic actuators
- the actuator control for controlling at least one of the plurality of hydraulic actuators according to the speed of the plurality of hydraulic actuators and predetermined conditions when operating the operation device
- Work machine including a control device having a control unit, a posture detection device for detecting a physical quantity related to the posture of a specific front member which is one of the plurality of front members, and an operation amount input from an operator to the operation device Operation amount detection for detecting a physical amount related to the operation amount for the specific front member
- a first speed calculator configured to calculate a first speed of a specific hydraulic actuator that drives the specific front member among the plurality of hydraulic actuators from the detection value of the operation amount detection device;
- a second speed calculator configured to calculate a second speed of the specific hydraulic
- the first speed is calculated as the third speed until the predetermined time of 1 and the second predetermined time which is larger than the first predetermined time from the first predetermined time
- a velocity calculated from the first velocity and the second velocity is calculated as the third velocity
- the second velocity is calculated as the third velocity
- the speed of a specific hydraulic actuator for driving the working device can be calculated more appropriately, and the behavior of the tip end of the working device in the MC can be stabilized.
- FIG. 7 is a functional block diagram of an MC control unit in FIG. 6; 10 is a flowchart of boom raising control by the boom control unit.
- FIG. 10 is a functional block diagram of an MC control unit according to a second embodiment.
- the flowchart which calculates arm cylinder assumption speed of a 2nd embodiment Explanatory drawing of the relationship between arm operation pressure and arm cylinder speed (1st speed, 2nd speed, real speed). The figure which shows the relationship of the cylinder speed with respect to the operation amount of 2nd Embodiment.
- FIG. 1 is a block diagram of a hydraulic excavator according to a first embodiment of the present invention
- FIG. 2 is a diagram showing a controller of the hydraulic excavator according to the embodiment of the present invention together with a hydraulic drive
- FIG. 5 is a detailed view of a front control hydraulic unit 160 in FIG.
- the hydraulic shovel 1 is configured by an articulated articulated front working device 1A and a vehicle body 1B.
- the vehicle body 1B includes a lower traveling body 11 traveling by the left and right traveling hydraulic motors 3a (see FIG. 2) and 3b, and an upper swing body 12 attached on the lower traveling body 11 and turning by a turning hydraulic motor 4. .
- the front work device 1A is configured by connecting a plurality of front members (the boom 8, the arm 9 and the bucket 10) which respectively rotate in the vertical direction.
- the proximal end of the boom 8 is rotatably supported at the front of the upper swing body 12 via a boom pin.
- An arm 9 is rotatably connected to the tip of the boom 8 via an arm pin, and a bucket 10 is rotatably connected to the tip of the arm 9 via a bucket pin.
- the plurality of front members 8, 9, 10 are driven by hydraulic cylinders 5, 6, 7 which are a plurality of hydraulic actuators. Specifically, the boom 8 is driven by the boom cylinder 5, the arm 9 is driven by the arm cylinder 6, and the bucket 10 is driven by the bucket cylinder 7.
- the boom angle sensor 30 is mounted on the boom pin, the arm angle sensor 31 is mounted on the arm pin, and the bucket link so that the rotation angles ⁇ , ⁇ and ⁇ (see FIG. 5) can be measured.
- a bucket angle sensor 32 is attached to the upper swing body 12, and a vehicle body tilt angle sensor 33 is attached to the upper swing body 12 to detect the tilt angle ⁇ (see FIG. 5) of the upper swing body 12 (vehicle body 1B) with respect to a reference surface It is done.
- the angle sensors 30, 31 and 32 of the present embodiment are rotary potentiometers, they can be replaced by inclination angle sensors with respect to a reference plane (for example, horizontal plane), an inertial measurement unit (IMU), or the like.
- An operating device 47a for operating the traveling right hydraulic motor 3a (lower traveling body 11) having a traveling right lever 23a (FIG. 1) in the driver's cabin provided in the upper revolving superstructure 12;
- An operating device 47b (FIG. 2) having a left lever 23b (FIG. 1) for operating the traveling left hydraulic motor 3b (lower traveling body 11) and an operation right lever 1a (FIG. 1)
- Operating devices 45 b and 46 b (FIG. 2) for operating (the upper swing body 12) are installed.
- the travel right lever 23a, the travel left lever 23b, the operation right lever 1a, and the operation left lever 1b may be collectively referred to as operation levers 1 and 23.
- the engine 18 mounted on the upper revolving superstructure 12 drives the hydraulic pumps 2 a and 2 b and the pilot pump 48.
- the hydraulic pumps 2a and 2b are variable displacement pumps whose capacities are controlled by the regulators 2aa and 2ba, and the pilot pump 48 is a fixed displacement pump.
- the hydraulic pump 2 and the pilot pump 48 suck hydraulic fluid from the tank 200.
- a shuttle block 162 is provided in the middle of the pilot lines 144, 145, 146, 147, 148 and 149.
- the hydraulic pressure signals output from the operating devices 45, 46, 47 are also input to the regulators 2aa, 2ba via the shuttle block 162.
- a hydraulic pressure signal is input to the regulators 2aa and 2ba via the shuttle block 162, and the discharge flow rate of the hydraulic pumps 2a and 2b is controlled according to the hydraulic pressure signal.
- the pump line 48a which is a discharge pipe of the pilot pump 48, passes through the lock valve 39, and then branches into a plurality of branches to be connected to the valves in the operation devices 45, 46, 47 and the hydraulic unit 160 for front control.
- the lock valve 39 is an electromagnetic switching valve in this example, and the electromagnetic drive unit is electrically connected to a position detector of a gate lock lever (not shown) disposed in the driver's cab (FIG. 1). The position of the gate lock lever is detected by a position detector, and a signal corresponding to the position of the gate lock lever is input to the lock valve 39 from the position detector.
- the lock valve 39 When the position of the gate lock lever is in the lock position, the lock valve 39 is closed and the pump line 48a is shut off, and when in the lock release position, the lock valve 39 is opened and the pump line 48a is opened. That is, in the state where the pump line 48a is shut off, the operation by the operating devices 45, 46, 47 is invalidated, and the operation such as turning or digging is prohibited.
- the operating devices 45, 46, 47 are hydraulic pilot type operating devices, and based on the pressure oil discharged from the pilot pump 48, the operating amounts of the operating levers 1, 23 operated by the operator (for example, levers)
- a pilot pressure (sometimes referred to as operating pressure) is generated according to the stroke and the operating direction.
- the pilot pressure thus generated is supplied to the hydraulic drive units 150a to 155b of the corresponding flow control valves 15a to 15f (FIG. 2 or FIG. 3) through the pilot lines 144a to 149b (see FIG. 3). It is used as a control signal for driving the control valves 15a to 15f.
- the pressure oil discharged from the hydraulic pump 2 passes through the flow control valves 15a, 15b, 15c, 15d, 15e and 15f (see FIG. 2), the traveling right hydraulic motor 3a, the traveling left hydraulic motor 3b, the turning hydraulic motor 4,
- the boom cylinder 5, the arm cylinder 6 and the bucket cylinder 7 are supplied.
- the boom cylinder 5, the arm cylinder 6, and the bucket cylinder 7 are expanded and contracted by the supplied pressure oil, and the boom 8, the arm 9, and the bucket 10 are respectively rotated to change the position and posture of the bucket 10.
- the swing hydraulic motor 4 is rotated by the supplied pressure oil, and the upper swing body 12 swings relative to the lower traveling body 11.
- the traveling right hydraulic motor 3a and the traveling left hydraulic motor 3b are rotated by the supplied pressure oil, and the lower traveling body 11 travels.
- the tank 200 is provided with a hydraulic fluid temperature detection device 210 for detecting the temperature of the hydraulic fluid for driving the hydraulic actuator.
- the hydraulic oil temperature detection device 210 can be installed outside the tank 200, and may be attached, for example, to the inlet line or the outlet line of the tank 200.
- FIG. 4 is a block diagram of a machine control (MC) system provided in the hydraulic shovel according to the present embodiment.
- the system of FIG. 4 controls the process of controlling the speeds of the hydraulic cylinders 5, 6, 7 and the front work device 1A based on predetermined conditions when the operating devices 45, 46 are operated by the operator as MC. Run.
- “automatic control” in which the operation of the work unit 1A is controlled by the computer when the operation unit 45, 46 is not operated is “automatic control", but the operation of the work unit 1A is performed only when the operation unit 45, 46 is operated. May be referred to as "semi-automatic control" controlled by a computer.
- the digging operation (specifically, at least one instruction of an arm cloud, a bucket cloud, and a bucket dump) is input as the MC of the front work device 1A via the operation devices 45b and 46a, the target surface 60 (see FIG. The position of the tip of the working device 1A is held on the target surface 60 and in the area above it based on the positional relationship between the reference numeral 5) and the tip of the working device 1A (in this embodiment, the tip of the bucket 10).
- the control signal for example, the boom cylinder 5 is extended to forcibly perform the boom raising operation
- for forcibly operating at least one of the hydraulic actuators 5, 6, 7 corresponds to the corresponding flow control valve 15a, 15b, Output to 15c.
- the control point of the front work apparatus 1A at the time of MC is set to the tip of the bucket 10 of the hydraulic shovel (the tip of the work apparatus 1A), but the control point is the tip of the work apparatus 1A. If it is a point, it is changeable besides a bucket toe. For example, the bottom of the bucket 10 and the outermost part of the bucket link 13 can also be selected.
- the system shown in FIG. 4 is installed in the driver's cab with the working device posture detecting device 50, the target surface setting device 51, the operator operation amount detecting device 52a, and a display capable of displaying the positional relationship between the target surface 60 and the working device 1A.
- a device for example, a liquid crystal display
- a controller control device 40 which performs MC control are provided.
- the working device posture detection device (posture detection device) 50 is configured of a boom angle sensor 30, an arm angle sensor 31, a bucket angle sensor 32, and a vehicle body inclination angle sensor 33. These angle sensors 30, 31, 32, 33 function as attitude sensors for detecting physical quantities related to the attitudes of the boom 8, the arm 9, and the bucket 10, which are a plurality of front members.
- the target surface setting device 51 is an interface capable of inputting information on the target surface 60 (including position information and tilt angle information of each target surface).
- the target surface setting device 51 is connected to an external terminal (not shown) which stores three-dimensional data of the target surface defined on the global coordinate system (absolute coordinate system). The operator may manually input the target surface via the target surface setting device 51.
- the operator operation amount detection device (operation amount detection device) 52a is an operation pressure (first control signal) generated in the pilot lines 144, 145, 146 by the operation of the operation levers 1a, 1b (the operation devices 45a, 45b, 46a) by the operator.
- the pressure sensors 70a, 70b, 71a, 71b, 72a, 72b are obtained from pressure sensors 70a, 70b, 71a, 71b, 72a, 72b.
- These pressure sensors 70a, 70b, 71a, 71b, 72a, 72b are provided via operating devices 45a, 45b, 46a for the boom 7 (boom cylinder 5), the arm 8 (arm cylinder 6), and the bucket 9 (bucket cylinder 7). It functions as an operation amount sensor that detects a physical amount related to the operation amount of the operator.
- the front control hydraulic unit 160 is provided on the pilot lines 144 a and 144 b of the operating device 45 a for the boom 8 and detects a pilot pressure (first control signal) as an operation amount of the operation lever 1 a.
- Pressure sensors 70a and 70b, an electromagnetic proportional valve 54a connected to the pilot pump 48 via the pump line 148a on the primary port side to reduce and output the pilot pressure from the pilot pump 48, and a pilot of the operating device 45a for the boom 8 Select the high pressure side of the pilot pressure in the pilot line 144a and the control pressure (second control signal) output from the solenoid proportional valve 54a, connected to the line 144a and the secondary port side of the solenoid proportional valve 54a, and select the flow control valve Shuttle valve 82a leading to the hydraulic drive unit 150a of 15a and the operating device 45a for the boom 8 It is installed in the pilot line 144b, and a pilot pressure proportional solenoid valve 54b (the first control signal) reduces to the outputs of the pilot line 144b based on the control signal from the controller 40.
- the front control hydraulic unit 160 is installed on the pilot lines 145a and 145b for the arm 9, and detects the pilot pressure (first control signal) as an operation amount of the control lever 1b and outputs it to the controller 40 71a, 71b and a solenoid proportional valve 55b installed in the pilot line 145b and reducing and outputting the pilot pressure (first control signal) based on the control signal from the controller 40, installed in the pilot line 145a and controlled
- An electromagnetic proportional valve 55a is provided which reduces and outputs the pilot pressure (first control signal) in the pilot line 145a based on the control signal from the controller 40.
- the front control hydraulic unit 160 also detects a pilot pressure (first control signal) as an operation amount of the control lever 1a on the pilot lines 146a and 146b for the bucket 10 and outputs the pressure sensor 72a to the controller 40. , 72b, and solenoid proportional valves 56a and 56b that reduce and output the pilot pressure (first control signal) based on the control signal from the controller 40, and the primary port side is connected to the pilot pump 48 and the pilot pump 48 Select the high pressure side of the solenoid proportional valves 56c and 56d for reducing and outputting the pilot pressure, the pilot pressure in the pilot lines 146a and 146b, and the control pressure output from the solenoid proportional valves 56c and 56d, and The shuttle valves 83a and 83b leading to the hydraulic drive units 152a and 152b It is provided. In FIG. 3, connecting lines between the pressure sensors 70, 71, 72 and the controller 40 are omitted for convenience of drawing.
- the electromagnetic proportional valves 54b, 55a, 55b, 56a, 56b have the maximum opening degree when not energized, and the opening degree decreases as the current as the control signal from the controller 40 increases.
- the electromagnetic proportional valves 54a, 56c, 56d have an opening degree of zero when not energized and an opening degree when energized, and the opening degree increases as the current (control signal) from the controller 40 increases.
- the degree of opening 54, 55, 56 of each solenoid proportional valve corresponds to the control signal from the controller 40.
- the solenoid proportional valves 54a, 56c, 56d are driven by outputting a control signal from the controller 40, when there is no operator operation of the corresponding operating device 45a, 46a. Since the pilot pressure (second control signal) can also be generated, the boom raising operation, the bucket cloud operation, and the bucket dump operation can be forcibly generated. Similarly, when the solenoid proportional valves 54b, 55a, 55b, 56a and 56b are driven by the controller 40, the pilot pressure (first control signal) generated by the operator operation of the operating devices 45a, 45b and 46a is reduced. The pilot pressure (second control signal) can be generated, and the speed of the boom lowering operation, the arm cloud / dump operation, and the bucket cloud / dump operation can be forcibly reduced from the value of the operator operation.
- the pilot pressure generated by the operation of the operation devices 45a, 45b, and 46a is referred to as a "first control signal”.
- the pilot pressure generated by correcting (reducing) the first control signal by driving the solenoid proportional valves 54b, 55a, 55b, 56a, 56b by the controller 40 The pilot pressure generated by driving the solenoid proportional valves 54a, 56c, 56d by the controller 40 and newly generated separately from the first control signal is referred to as a "second control signal".
- the second control signal is generated when the velocity vector of the control point of work device 1A generated by the first control signal violates a predetermined condition, and the velocity vector of the control point of work device 1A which does not violate the predetermined condition Are generated as control signals for generating
- the second control signal is prioritized.
- the first control signal is interrupted by the proportional solenoid valve, and the second control signal is input to the other hydraulic drive. Therefore, of the flow control valves 15a to 15c, one for which the second control signal is calculated is controlled based on the second control signal, and one for which the second control signal is not calculated is based on the first control signal.
- the MC can also be said to control the flow control valves 15a to 15c based on the second control signal.
- the controller 40 includes an input unit 91, a central processing unit (CPU) 92 as a processor, a read only memory (ROM) 93 and a random access memory (RAM) 94 as a storage device, and an output unit 95.
- the input unit 91 includes signals from the angle sensors 30 to 32 and the tilt angle sensor 33, which are the working device posture detection device 50, and a signal from the target surface setting device 51, which is a device for setting the target surface 60.
- a signal from an operator operation amount detection device 52a which is a pressure sensor (including pressure sensors 70, 71, 72) for detecting an operation amount from the devices 45a, 45b, 46a is input and converted so that the CPU 92 can calculate. .
- the ROM 93 is a recording medium storing a control program for executing the MC including processing according to the flowchart to be described later and various information etc. necessary for the execution of the flowchart.
- the CPU 92 is a control program stored in the ROM 93 In accordance with the above, predetermined arithmetic processing is performed on the signals taken in from the input unit 91 and the memories 93 and 94.
- the output unit 95 generates a signal for output according to the calculation result in the CPU 92 and outputs the signal to the solenoid proportional valves 54 to 56 or the display device 53 to drive and control the hydraulic actuators 5 to 7. Or displays an image of the vehicle body 1B, the bucket 10, the target surface 60, etc. on the screen of the display device 53.
- controller 40 in FIG. 4 includes semiconductor memories such as the ROM 93 and the RAM 94 as storage devices, any storage device can be substituted in particular.
- a magnetic storage device such as a hard disk drive may be provided.
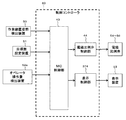
- FIG. 6 is a functional block diagram of the controller 40. As shown in FIG. The controller 40 includes an MC control unit 43, an electromagnetic proportional valve control unit 44, and a display control unit 374.
- the display control unit 374 controls the display device 53 based on the work device attitude and the target surface output from the MC control unit 43.
- the display control unit 374 is provided with a display ROM in which a large number of display related data including images and icons of the work device 1A are stored, and the display control unit 374 determines a predetermined value based on the flag included in the input information.
- the program is read and display control on the display device 53 is performed.
- FIG. 7 is a functional block diagram of the MC control unit 43 in FIG.
- the MC control unit 43 includes an operation amount calculation unit 43a, a posture calculation unit 43b, a target surface calculation unit 43c, an arm cylinder first speed calculation unit 43f, an arm cylinder second speed calculation unit 43d, and an arm cylinder third A speed calculation unit 43e and an actuator control unit 81 (a boom control unit 81a and a bucket control unit 81b) are provided.
- the operation amount calculator 43a calculates the amount of operation of the operation devices 45a, 45b, 46a (the operation levers 1a, 1b) based on the detection value of the operator operation amount detection device 52a. That is, the amount of operation of the operating devices 45a, 45b, 46a can be calculated from the detection values of the pressure sensors 70, 71, 72.
- pressure sensors 70, 71, 72 for calculating the amount of operation is merely an example, and for example, position sensors (for example, rotary encoders) that detect rotational displacements of the operating levers of the respective operating devices 45a, 45b, 46a.
- the amount of operation of the operation lever may be detected.
- the posture calculation unit 43b calculates the posture of the boom 8, the arm 9, and the bucket 10 in the local coordinate system, the posture of the front work device 1A, and the position of the tip of the bucket 10 based on the detection values of the work device posture detection device 50. Do.
- the attitudes of the boom 8, the arm 9, and the bucket 10 and the attitude of the front working device 1A can be defined on the shovel coordinate system (local coordinate system) of FIG.
- the shovel coordinate system (XZ coordinate system) shown in FIG. 5 is a coordinate system set to the upper swing body 12 and the base portion of the boom 8 rotatably supported by the upper swing body 12 is an origin, and the upper swing is
- the Z axis was set vertically in the body 12 and the X axis was set horizontally.
- the inclination angle of the boom 8 with respect to the X axis is the boom angle ⁇
- the inclination angle of the arm 9 with respect to the boom 8 is the arm angle ⁇
- the inclination angle of the bucket tip with respect to the arm is the bucket angle ⁇ .
- the inclination angle of the vehicle body 1B (upper revolving unit 12) with respect to the horizontal plane (reference plane) is taken as the inclination angle ⁇ .
- the boom angle ⁇ is detected by the boom angle sensor 30, the arm angle ⁇ is detected by the arm angle sensor 31, the bucket angle ⁇ is detected by the bucket angle sensor 32, and the inclination angle ⁇ is detected by the vehicle body inclination angle sensor 33.
- the lengths of the boom 8, the arm 9, and the bucket 10 are L1, L2, and L3 respectively as defined in FIG. 5
- the posture of the working device 1A can be expressed by L1, L2, L3, ⁇ , ⁇ , ⁇ .
- the target surface calculation unit 43 c calculates the position information of the target surface 60 based on the information from the target surface setting device 51, and stores this in the ROM 93.
- a cross-sectional shape obtained by cutting a three-dimensional target surface along a plane (working plane of a working machine) along which the working device 1A moves is used as a target surface 60 (two-dimensional target surface).
- one target surface 60 is shown in the example of FIG. 5, there may be a case where there are a plurality of target surfaces.
- a method of setting the one closest to the work device 1A as the target surface for example, a method of setting one below the bucket toe as the target surface, or a arbitrarily selected one There is a method to make it a goal surface.
- the arm cylinder first speed calculation unit 43f calculates the speed of the arm cylinder 6 from the detection value of the operation amount to the arm 9 among the detection values of the operator operation amount detection device 52a, and the calculation result is the arm cylinder third speed calculation unit It is a part to output to 43e.
- the operation amount calculator 43a calculates the arm operation amount from the detection value of the arm operation amount by the operator operation amount detector 52a
- the arm cylinder first speed calculator 43f has the operation amount calculator 43a.
- the speed of the arm cylinder 6 is calculated based on the calculated arm operation amount and the table of FIG. 9 in which the correlation between the arm operation amount and the arm cylinder speed is defined in a one-to-one manner. In the table of FIG. 9, based on the cylinder speed with respect to the operation amount previously obtained by experiment or simulation, the correlation between the operation amount and the speed is defined such that the arm cylinder speed monotonously increases with the increase of the arm operation amount. .
- the arm 9 is referred to as a "specific front member", and the arm cylinder 6 driving the arm 9 is referred to as a “specific hydraulic actuator”.
- the speed of the arm cylinder 6 calculated by the arm cylinder first speed calculation unit 43f is referred to as "first speed”.
- the arm cylinder second speed calculation unit 43d calculates the speed of the arm cylinder 6 from the detection value of the posture of the arm 9 among the detection values of the work device posture detection device 50, and the calculation result is calculated as an arm cylinder third speed calculation unit 43e.
- the posture calculation unit 43b calculates the posture of the arm 9 from the detection value of the arm 9 by the work apparatus posture detection device 50, and the arm cylinder second speed calculation unit 43d is calculated by the posture calculation unit 43b.
- the velocity of the arm cylinder 6 is calculated from the time change of the attitude of the arm 9 and the dimension value (described later with reference to FIG. 5A) between the position where the boom 8, the arm 9 and the arm cylinder 6 are connected.
- the speed of the arm cylinder 6 calculated by the arm cylinder second speed calculator 43d is referred to as a "second speed".
- the dimension value of the front work device 1A used to calculate the second speed will be described using FIG. 5A.
- a line segment M2 connecting the connecting point of the boom 8 and the arm 9 and a connecting point of the arm 9 and the arm cylinder 6 and a line M3 connecting the connecting point of the boom 8 and the arm 9 and the connecting point of the boom 8 and the arm cylinder 6 Using the angle F1 between the line segment L1 which is the length of the boom 8 and the line segment M3, the angle F2 between the line segment L2 which is the length of the arm 9 and the line segment M2, and the arm angle ⁇
- the arm cylinder length M1 is determined by using the cosine theorem with respect to a triangle consisting of line segments M1, M2, and M3.
- the second velocity of the arm cylinder 6 can be calculated by calculating the time change of the obtained arm cylinder length M1.
- the arm cylinder third speed calculator 43e calculates the first speed of the arm cylinder 6 calculated by the arm cylinder first speed calculator 43f and the second speed of the arm cylinder 6 calculated by the arm cylinder second speed calculator 43d.
- the actuator control unit 81 calculates the velocity (referred to as “third velocity”) used as the velocity of the arm cylinder 6 when executing MC, and outputs the calculation result to the actuator control unit 81. It is a part. Details of the arm cylinder third speed calculator 43e when calculating the third speed will be described later with reference to FIG.
- the boom control unit 81a and the bucket control unit 81b configure an actuator control unit 81 that controls at least one of the plurality of hydraulic actuators 5, 6, 7 according to predetermined conditions when operating the operation devices 45a, 45b, 46a. .
- the actuator control unit 81 calculates target pilot pressures of the flow control valves 15 a, 15 b and 15 c of the hydraulic cylinders 5, 6 and 7, and outputs the calculated target pilot pressure to the solenoid proportional valve control unit 44.
- the boom control unit 81a operates the operating devices 45a, 45b, 46a at the position of the target surface 60, the attitude of the front work device 1A, the position of the tip of the bucket 10, and the speeds of the hydraulic cylinders 5, 6, 7 Based on the target surface 60 or on top of which the tip of the bucket 10 (control point) is positioned to execute MC to control the operation of the boom cylinder 5 (boom 8).
- the boom control unit 81 a calculates the target pilot pressure of the flow control valve 15 a of the boom cylinder 5. Details of the MC by the boom control unit 81a will be described later with reference to FIG.
- the bucket control unit 81b is a portion for executing bucket angle control by the MC when operating the operation devices 45a, 45b, 46a. Specifically, when the distance between the target surface 60 and the tip of the bucket 10 is equal to or less than a predetermined value, the bucket cylinder 7 (bucket 7) is set such that the angle ⁇ of the bucket 10 with respect to the target surface 60 becomes a preset target surface bucket angle ⁇ TGT. MC (bucket angle control) for controlling the operation of 10) is executed. The bucket control unit 81 b calculates a target pilot pressure of the flow control valve 15 c of the bucket cylinder 7.
- the solenoid proportional valve control unit 44 calculates a command to each of the solenoid proportional valves 54 to 56 based on the target pilot pressure to each of the flow rate control valves 15a, 15b, 15c output from the actuator control unit 81.
- the pilot pressure (first control signal) based on the operator operation matches the target pilot pressure calculated by the actuator control unit 81, the current value (command value) to the corresponding solenoid proportional valves 54 to 56 Becomes zero, and the corresponding solenoid proportional valves 54 to 56 are not operated.
- FIG. 11 is a flowchart showing how the arm cylinder third speed calculator 43 e calculates the third speed of the arm cylinder 6.
- the arm cylinder third speed calculator 43e repeatedly executes the flow of FIG. 11 at a predetermined control cycle, and in the following description, the control cycle is also referred to as a step.
- the subject in the following description of FIG. 11 is the arm cylinder third speed calculator 43e.
- the threshold Pit is a constant for determining whether or not the arm 9 is operated. If the arm operation amount is larger than the threshold Pit, it is determined that the arm operation is performed, and the process proceeds to S610. If the arm operation amount is less than the threshold Pit, it is determined that the arm operation is not performed, and the process proceeds to S690.
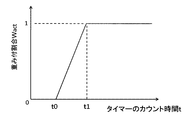
- the weighted proportion Wact of the second speed Vama is calculated from the count time t of the timer calculated in S620 or S630 and the table of FIG.
- the weighting ratio Wact is a function determined by the count time t of the timer as shown in FIG. 12, and the weighting ratio Wact may be referred to as a “second weighting function” in this document.
- FIG. 17 is an explanatory view schematically showing a relationship between an example of t0 and t1 and the first velocity, the second velocity and the actual velocity of the arm cylinder 6. As shown in FIG. When the arm operating pressure is rapidly increased from zero as shown in the upper diagram in FIG. 17, the first velocity, second velocity and actual velocity (true value) of the arm cylinder 6 change as in the lower diagram in FIG. Do.
- the first speed is calculated from the arm operation pressure (operation amount) and the table of FIG. 9 as described above, it changes at substantially the same timing as the change in arm operation pressure.
- the second velocity is calculated based on the actual posture change of the arm 9 as described above, so it changes as shown in the figure after the actual velocity and becomes a value that can be identified as the actual velocity at time t0. Reach.
- the time required for the second speed to be considered to coincide with the value of the actual speed after the start of the lever operation is set to t0.
- t1 is a time longer than t0, and even if the third speed gradually changes from the first speed to the second speed from t0 to t1, the operation of the bucket toe does not give the operator a sense of discomfort
- the necessary and sufficient time is set to t1.
- t0 and t1 can be set to values as small as possible that the boom response (MC response) can be secured (for example, each of t0 and t1 can be set to a value of 2 seconds or less).
- the weighted proportion West of the arm cylinder first speed Vame is calculated from the weighted proportion Wact of the arm cylinder second speed calculated in S660.
- the weighting ratio West may be referred to as a “first weighting function”.
- FIG. 8 is a flowchart of the MC executed by the boom control unit 81a. The process is started when the operating devices 45a, 45b and 46a are operated by the operator.
- the boom control unit 81a acquires the speeds of the hydraulic cylinders 5, 6, and 7.
- the speeds of the boom cylinder 5 and the bucket cylinder 7 are obtained by calculating the speeds of the boom cylinder 5 and the bucket cylinder 7 based on the operation amounts for the boom 8 and the bucket 10 calculated by the operation amount calculation unit 43a.
- the cylinder speed corresponding to the operation amount determined in advance by experiment or simulation is set as a table, and the speeds of the boom cylinder 5 and the bucket cylinder 7 are calculated accordingly.
- the third velocity Vams calculated by the arm cylinder third velocity calculating unit 43e based on the flow of FIG.
- the boom control unit 81a operates the tip of the bucket operated by the operator based on the operation speeds of the hydraulic cylinders 5, 6, 7 acquired in S410 and the attitude of the work device 1A calculated by the attitude calculation unit 43b ( Calculate the velocity vector B of the toe).
- the boom control unit 81a determines the target surface to be controlled from the bucket tip from the position (coordinates) of the tip of the bucket 10 calculated by the posture calculation unit 43b and the straight line including the target surface 60 stored in the ROM 93.
- the distance D up to 60 is calculated.
- the lower limit value ay of the lower limit side of the component perpendicular to the target surface 60 of the velocity vector of the bucket tip is calculated.
- the boom control unit 81a acquires a component by which is perpendicular to the target surface 60 in the velocity vector B of the bucket tip by the operator operation calculated in S420.
- the boom control unit 81a determines whether the limit value ay calculated in S430 is 0 or more.
- xy coordinates are set. In the xy coordinates, the x axis is parallel to the target surface 60 and positive in the right direction in the drawing, and the y axis is perpendicular to the target surface 60 and positive in the upper direction in the drawing.
- the vertical component by and the limit value ay are negative, and the horizontal component bx and the horizontal component cx and the vertical component cy are positive. And it is clear from FIG.
- the boom control unit 81a determines whether or not the vertical component by of the velocity vector B at the toe of the operator's operation is 0 or more. A positive by indicates that the vertical component by of the velocity vector B is upward, and a negative by indicates that the vertical component by of the velocity vector B is downward. If it is determined in S460 that the vertical component by is greater than or equal to 0 (ie, if the vertical component by is upward), the process proceeds to S470, and if the vertical component by is less than 0, the process proceeds to S500.
- the boom control unit 81a compares the limit value ay with the absolute value of the vertical component by, and proceeds to S500 if the absolute value of the limit value ay is greater than or equal to the absolute value of the vertical component by. On the other hand, if the absolute value of the limit value ay is less than the absolute value of the vertical component by, the process proceeds to S530.
- the boom control unit 81a determines whether or not the vertical component by of the velocity vector B at the toe of the operator's operation is 0 or more. If it is determined in S480 that the vertical component by is greater than or equal to 0 (ie, if the vertical component by is upward), the process proceeds to S530, and if the vertical component by is less than 0, the process proceeds to S490.
- the boom control unit 81a compares the limit value ay with the absolute value of the vertical component by, and proceeds to S530 if the absolute value of the limit value ay is greater than or equal to the absolute value of the vertical component by. On the other hand, if the absolute value of the limit value ay is less than the absolute value of the vertical component by, the process proceeds to S500.
- the boom control unit 81a sets the speed vector C to zero.
- the boom control unit 81a calculates the target speeds of the hydraulic cylinders 5, 6, 7 based on the target speed vector T (ty, tx) determined in S520 or S540.
- the target is achieved by adding the velocity vector C generated by the operation of the boom 8 by machine control to the velocity vector B. Realize the velocity vector T.
- the boom control unit 81a sets the target pilot pressure to the flow control valves 15a, 15b, 15c of the hydraulic cylinders 5, 6, 7 based on the target speeds of the cylinders 5, 6, 7 calculated in S550.
- the boom control unit 81a outputs the target pilot pressure to the flow control valves 15a, 15b, 15c of the hydraulic cylinders 5, 6, 7 to the solenoid proportional valve control unit 44.
- the solenoid proportional valve control unit 44 controls the solenoid proportional valves 54, 55, and 56 such that the target pilot pressure acts on the flow control valves 15a, 15b, and 15c of the hydraulic cylinders 5, 6, and 7, and thereby the work device Drilling by 1A is performed.
- the proportional solenoid valve 55c is controlled so that the tip of the bucket 10 does not enter the target surface 60, and the raising operation of the boom 8 Is done automatically.
- the boom control (forced boom raising control) by the boom control unit 81a and the bucket control (bucket angle control) by the bucket control unit 81b are executed as MC
- the distance between the bucket 10 and the target surface 60 is
- the boom control according to D may be executed as MC.
- time t0 and time t1 in FIG. 12 are as small as possible (for example, a value of 2 seconds or less) in which the boom response (MC response) can be secured, from the state S1 after the start of the arm cloud operation It is assumed that transition to state S2 is after time t1.
- a command is output from the boom control unit 81a to the solenoid valve 54a based on the flow of FIG. Control (MC) is executed.
- the arm cylinder third speed calculator 43e The first velocity is output to the actuator control unit 81 as the velocity of the arm cylinder 6 based on the control flow of FIG.
- the actuator control unit 81 (boom control unit 81a) calculates the bucket tip speed B while using the first speed as the speed of the arm cylinder 6, and MC is activated as needed based on the flow of FIG.
- the toe of the bucket 10 is held on or above the target surface 60.
- the arm cylinder third speed calculator 43e The second speed is output to the actuator control unit 81 as the speed of the arm cylinder 6 based on the control flow of (11).
- the actuator control unit 81 (boom control unit 81a) calculates the bucket tip speed B while using the second speed as the speed of the arm cylinder 6, and MC is activated as needed based on the flow of FIG.
- the toe of the bucket 10 is held on or above the target surface 60.
- MC can be performed at a speed close to the actual speed, so the behavior of the toe can be stabilized. .
- the second speed calculated based on the actual posture change is used as compared with the case where the first speed is always used as the speed of the arm cylinder at the time of MC.
- MC can be stabilized because it is less susceptible to changes in load pressure, posture, oil temperature, etc.
- the posture sensor can detect a change in posture after the arm actually starts moving, it has been mentioned that the response of the MC to the start of the movement of the arm may be delayed. However, even if the operator makes a sudden change in the operation amount of the arm operation lever even if the arm does not start moving, the actual arm cylinder speed may change earlier than the response of the attitude sensor, so the arm starts moving Similarly, the arm speed calculated from the output of the posture sensor may deviate from the actual arm speed. The present embodiment addresses this point.
- FIG. 15 is a functional block diagram of the MC control unit 43A of the second embodiment.
- the MC control unit 43A of this embodiment is different from that of the first embodiment, and inputs the detection value detected by the hydraulic oil temperature detection device 210 to the arm cylinder first speed calculation unit 43f. The detected value is used for the correction of the first speed.
- the control flow of the arm cylinder third speed calculator 43e is different from that of the first embodiment.
- the other parts are the same as in the first embodiment, and the description will be omitted.
- the present embodiment will be described in detail.
- FIG. 16 is a flowchart showing how the arm cylinder third speed calculator 43 e of the second embodiment calculates the third speed of the arm cylinder 6. As in the first embodiment, the arm cylinder third speed calculator 43e repeatedly executes the flow of FIG. 16 at a predetermined control cycle, and the same processing as that of FIG. The subject in the following description of FIG. 16 is the arm cylinder third speed calculator 43e.
- the threshold dPit can be determined by the following method.
- ⁇ About threshold dPit> When the operating speed of arm 9 changes rapidly due to the operation of the operator (when the time change of the operating speed of arm 9 is large), the detection response performance of working device attitude detection device 50 determines the actual arm cylinder speed (true In some cases, a deviation may occur between the value) and the second speed calculated by the arm cylinder second speed calculator 43d. It is assumed that the time change amount of the operation speed of the arm 9 causing this deviation is equal to or more than the threshold value dWam.
- the working device posture detection device 50 causes a response delay, and if less than the threshold dWam, the working device posture detection device 50 has the time of the operating speed of the arm 9 The amount of change can be sufficiently followed.
- the change amount of the arm operation amount (equivalent to the arm operation pressure) at which the time change amount of the operation speed of the arm 9 becomes the threshold value dWam is obtained in advance by experiment or simulation and is set as the threshold value dPit. .
- step S720 the count time t of the timer is advanced by the control cycle, and the process proceeds to step S640.
- the arm operation is considered to be continuing from one step before (that is, the first In the same manner as when YES is determined in S610 of the embodiment), the timer count time t is advanced by the control cycle in S620, and the process proceeds to S640.
- the arm cylinder first speed calculator 43f acquires the first speed Vame calculated in consideration of the detection value of the hydraulic oil temperature detection device 210.
- the arm cylinder first speed calculating unit 43f has the table of FIG. 18 in which the arm operating amount calculated by the operating amount calculating unit 43a and the correlation between the arm operating amount and the arm cylinder speed are defined, and the hydraulic oil temperature detection device 210 The first velocity of the arm cylinder 6 is calculated based on the detected value (the detected temperature Tt).
- the correlation between the amount of operation and the speed is defined so that the arm cylinder speed monotonously increases with the increase in the amount of arm operation.
- FIG. 18 shows that when the temperature Tt detected by the hydraulic fluid temperature detection device 210 is less than or equal to the predetermined value Tt0, the arm cylinder speed is increased according to the increase of the deviation .DELTA.Tt between the detected temperature Tt of the hydraulic fluid temperature detection device 210 and the predetermined value Tt0. It is corrected to decrease.
- FIG. 18 shows functions used when the temperatures detected by the hydraulic oil temperature detection device 210 are Tt0, Tt1, Tt2 and Tt3 (where Tt3 ⁇ Tt2 ⁇ Tt1 ⁇ Tt0).
- the speed of the arm cylinder 6 decreases in accordance with the increase of the deviation ⁇ Tt from the predetermined value Tt0.
- the arm cylinder first speed calculator 43f calculates a speed smaller than the speed calculated from the table in FIG. 9 and the arm operation amount calculated by the operation amount calculator 43a as the first speed Vame.
- the processing after S660 is the same as the processing in FIG.
- the arm cylinder third speed calculating unit 43e performs the timer at S630 via the processing of S720 and S730 in FIG. It resets and outputs the first speed to the actuator control unit 81 as the speed of the arm cylinder 6.
- the first speed tends to be faster than the actual speed of the arm, the response of the boom raising control by the MC is secured, so that the behavior of the toe can be stabilized.
- the arm cylinder third speed calculator 43e passes the process of S720 and S730 in FIG.
- the count time t is advanced by the control cycle, and the process proceeds to S640.
- the arm cylinder third speed calculator 43e outputs the third speed corresponding to the count time t to the actuator controller 81.
- the arm cylinder third velocity calculator 43e calculates the first velocity Vame, the second velocity Vama, and the weighted ratio Wact, West based on the control flow of FIG.
- the arm cylinder third speed calculator 43e When the count time t is t1 or more, the arm cylinder third speed calculator 43e outputs the second speed as the speed of the arm cylinder 6 to the actuator controller 81 based on the control flow of FIG. As described above, if MC is performed using the second speed as the speed of the arm cylinder 6 during the operation of the arm 9, MC can be performed at a speed close to the actual speed, so the behavior of the toe can be stabilized. .
- the boom raising operation amount is appropriately set to calculate the estimated speed of the arm cylinder based on the detection result of the hydraulic oil temperature detection device 210 It can be calculated.
- MC can be stabilized because it is less susceptible to changes in load pressure, posture, oil temperature, etc.
- the times t0 and t1 are fixed values in the second embodiment, the values of the times t0 and t1 may be variable according to the amount of change in the arm operation amount.
- the weighted ratio Wact of the second velocity Vama is calculated from the count time t of the timer and the table of FIG. 12, but it is determined NO in S610.
- the table to be used is made different between the case (when it is determined that the arm operation has started) and when it is determined NO in S730 (when the change amount of the arm operation amount is determined to be equal to or greater than the threshold dPit) Also good. That is, if it is determined NO in S730, a table different from the table of FIG. 12 may be used.
- the arm cylinder first speed calculating unit 43f performs the first speed correction process based on the hydraulic oil temperature, but this process can be omitted from the present embodiment, and is also added to the first embodiment. It is possible.
- the posture information of the shovel may be calculated not by the angle sensor but by the cylinder stroke sensor.
- the hydraulic pilot shovel has been described as an example, the electric lever shovel may be configured to control the command current generated from the electric lever.
- the method of calculating the velocity vector of the front work apparatus 1A may be obtained from the angular velocity calculated by differentiating the angles of the boom 8 and the bucket 10, not the pilot pressure by the operator operation.
- the components of the controller 40 described above and the functions and execution processes of the components are realized by hardware (for example, designing logic for executing each function with an integrated circuit). Also good.
- the configuration according to the controller 40 may be a program (software) in which each function according to the configuration of the controller 40 is realized by being read and executed by an arithmetic processing unit (for example, a CPU).
- the information related to the program can be stored in, for example, a semiconductor memory (flash memory, SSD, etc.), a magnetic storage device (hard disk drive, etc.), a recording medium (magnetic disk, optical disc, etc.), and the like.
- the present invention is not limited to the above-described embodiments, and includes various modifications within the scope of the present invention.
- the present invention is not limited to the one provided with all the configurations described in each of the above-described embodiments, and includes one in which a part of the configuration is deleted.
- part of the configuration according to an embodiment can be added to or replaced with the configuration according to another embodiment.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Operation Control Of Excavators (AREA)
Abstract
Description
<基本構成>
図1は本発明の第1の実施形態に係る油圧ショベルの構成図であり,図2は本発明の実施形態に係る油圧ショベルの制御コントローラを油圧駆動装置と共に示す図であり,図3は図2中のフロント制御用油圧ユニット160の詳細図である。
図3に示すように,フロント制御用油圧ユニット160は,ブーム8用の操作装置45aのパイロットライン144a,144bに設けられ,操作レバー1aの操作量としてパイロット圧(第1制御信号)を検出する圧力センサ70a,70bと,一次ポート側がポンプライン148aを介してパイロットポンプ48に接続されパイロットポンプ48からのパイロット圧を減圧して出力する電磁比例弁54aと,ブーム8用の操作装置45aのパイロットライン144aと電磁比例弁54aの二次ポート側に接続され,パイロットライン144a内のパイロット圧と電磁比例弁54aから出力される制御圧(第2制御信号)の高圧側を選択し,流量制御弁15aの油圧駆動部150aに導くシャトル弁82aと,ブーム8用の操作装置45aのパイロットライン144bに設置され,制御コントローラ40からの制御信号を基にパイロットライン144b内のパイロット圧(第1制御信号)を低減して出力する電磁比例弁54bを備えている。
図4において制御コントローラ40は,入力部91と,プロセッサである中央処理装置(CPU)92と,記憶装置であるリードオンリーメモリ(ROM)93及びランダムアクセスメモリ(RAM)94と,出力部95とを有している。入力部91は,作業装置姿勢検出装置50である角度センサ30~32及び傾斜角センサ33からの信号と,目標面60を設定するための装置である目標面設定装置51からの信号と,操作装置45a,45b,46aからの操作量を検出する圧力センサ(圧力センサ70,71,72を含む)であるオペレータ操作量検出装置52aからの信号を入力し,CPU92が演算可能なように変換する。ROM93は,後述するフローチャートに係る処理を含めMCを実行するための制御プログラムと,当該フローチャートの実行に必要な各種情報等が記憶された記録媒体であり,CPU92は,ROM93に記憶された制御プログラムに従って入力部91及びメモリ93,94から取り入れた信号に対して所定の演算処理を行う。出力部95は,CPU92での演算結果に応じた出力用の信号を作成し,その信号を電磁比例弁54~56または表示装置53に出力することで,油圧アクチュエータ5~7を駆動・制御したり,車体1B,バケット10及び目標面60等の画像を表示装置53の画面上に表示させたりする。
図11にアームシリンダ第3速度演算部43eがアームシリンダ6の第3速度を算出するフローチャート図を示す。アームシリンダ第3速度演算部43eは図11のフローを所定の制御周期で繰り返し実行し,以下の説明では制御周期をステップとも称している。なお,以下の図11の説明における主語はアームシリンダ第3速度演算部43eである。
本実施の形態の制御コントローラ40は,ブーム制御部81aによるブーム上げ制御をMCとして実行する。このブーム制御部81aによるブーム上げ制御のフローを図8に示す。図8はブーム制御部81aで実行されるMCのフローチャートであり,操作装置45a,45b,46aがオペレータにより操作されると処理が開始される。
上記のように構成される油圧ショベルの動作について図13を利用して説明する。ここでは,アーム回動中心を通過する水平面とアーム9のなす角をアーム角度φとし,アームクラウド操作を入力して切り上げ作業を開始する状態S1(図13:アーム角度φ1≦90度)から,切り上げ作業の途中段階である状態S2(図13:アーム角度φ2>90度)に遷移する場合のオペレータ操作と,制御コントローラ40(ブーム制御部81a)によるMCについて説明する。
まず,オペレータがアーム9のクラウド操作を開始してからの経過時間がt0未満の場合は,アームシリンダ第3速度演算部43eは図11の制御フローに基づいてアームシリンダ6の速度として第1速度をアクチュエータ制御部81に出力する。このとき,アクチュエータ制御部81(ブーム制御部81a)は,アームシリンダ6の速度として第1速度を利用しながらバケット先端速度Bを算出し,図8のフローに基づいて必要に応じてMCが発動され,これによりバケット10の爪先が目標面60の上またはその上方に保持される。このようにアーム9の始動時のアームシリンダ6の速度として第1速度を利用してMCを行うと,第1速度は実際のアームの速度より速くなる傾向があるものの(図17参照),MCによるブーム上げ制御の応答性は確保されるので,爪先の挙動を安定させることができる。
次に,オペレータがアーム9のクラウド操作を開始してからの経過時間がt0以後かつt1未満の場合は,アームシリンダ第3速度演算部43eは図11の制御フローに基づいて第1速度Vame及び第2速度Vama及び重み付割合Wact,Westから算出される第3速度Vams(Vams=Vama×Wact+Vame×West)をアームシリンダ6の速度としてアクチュエータ制御部81に出力する。これによりアクチュエータ制御部81(ブーム制御部81a)でアームシリンダ6の速度として利用される速度は,時間の経過とともに第1速度から徐々に第2速度にシフトするので,第1速度から第2速度に突然変化する場合と比較してバケット爪先の挙動が突然変化することが防止され,その結果オペレータが爪先の挙動に違和感をおぼえることを防止できる。
最後に,オペレータがアーム9のクラウド操作を開始してからの経過時間がt1以後の場合は,アームシリンダ第3速度演算部43eは図11の制御フローに基づいてアームシリンダ6の速度として第2速度をアクチュエータ制御部81に出力する。このとき,アクチュエータ制御部81(ブーム制御部81a)は,アームシリンダ6の速度として第2速度を利用しながらバケット先端速度Bを算出し,図8のフローに基づいて必要に応じてMCが発動され,これによりバケット10の爪先が目標面60の上またはその上方に保持される。このようにアーム9の動作中のアームシリンダ6の速度として第2速度を利用してMCを行うと,実速度に近い速度でMCを行うことができるので,爪先の挙動を安定させることができる。
次に本発明の第2実施形態について説明する。
まず,本実施形態が解決しようとする主たる課題を説明する。第1実施形態では,姿勢センサはアームが実際に動き始めてからその姿勢変化を検出可能となるため,アームの動き始めに対してMCの応答が遅れる可能性がある点を挙げた。しかし,アームの動き始め以外であっても,オペレータがアーム操作レバーの操作量を急変させた場合には,姿勢センサの応答よりも早く実際のアームシリンダ速度が変化し得るので,アームの動き始めと同様に姿勢センサの出力から算出したアーム速度は実際のアーム速度と乖離し得る。本実施形態はこの点の解決を図ったものである。
図16に第2実施形態のアームシリンダ第3速度演算部43eがアームシリンダ6の第3速度を算出するフローチャート図を示す。第1実施形態と同様に,アームシリンダ第3速度演算部43eは図16のフローを所定の制御周期で繰り返し実行し,図11と同じ処理には同じ符号を付して説明を省略する。なお,以下の図16の説明における主語はアームシリンダ第3速度演算部43eである。
オペレータの操作によってアーム9の動作速度が急速に変化したとき(アーム9の動作速度の時間変化量が大きいとき)に,作業装置姿勢検出装置50の検出応答性能により,実際のアームシリンダ速度(真値)とアームシリンダ第2速度演算部43dで演算した第2速度とで乖離が生じる場合がある。この乖離が生じるアーム9の動作速度の時間変化量が閾値dWam以上であるとする。すなわち,アーム9の動作速度の時間変化量が閾値dWam以上であれば作業装置姿勢検出装置50は応答遅れが生じ,閾値dWam未満であれば作業装置姿勢検出装置50はアーム9の動作速度の時間変化量に対して十分追従できる。
ここで本実施形態のアームシリンダ第1速度演算部43fの第1速度の演算処理について説明する。アームシリンダ第1速度演算部43fは,操作量演算部43aが算出したアーム操作量と,アーム操作量とアームシリンダ速度の相関関係が規定された図18のテーブルと,作動油温検出装置210の検出値(検出温度Tt)とを基にアームシリンダ6の第1速度を算出している。図18のテーブルでは,図9同様,アーム操作量の増加とともにアームシリンダ速度が単調に増加するように操作量と速度の相関関係が規定されている。図18のテーブルは,作動油温検出装置210の検出温度Ttが所定値Tt0以下の場合,作動油温検出装置210の検出温度Ttと所定値Tt0の偏差ΔTtの増加に応じてアームシリンダ速度が減少するように補正される。図18には,作動油温検出装置210の検出温度がTt0,Tt1,Tt2,Tt3(但し,Tt3<Tt2<Tt1<Tt0)のときに利用される関数を示した。このように,作動油温検出装置210によって検出された油温Ttが所定値Tt0以下の場合,所定値Tt0との偏差ΔTtの増加に応じてアームシリンダ6の速度が小さくなることを加味して,アームシリンダ第1速度演算部43fは,図9のテーブルと操作量演算部43aが算出したアーム操作量から算出される速度よりも小さい速度を第1速度Vameとして算出する。
上記のように構成される油圧ショベルにおいて,オペレータがアーム操作中にアーム操作量を急変させると,アームシリンダ第3速度演算部43eは図16のS720,730の処理を経由してS630でタイマーをリセットし,アームシリンダ6の速度として第1速度をアクチュエータ制御部81に出力する。これにより,第1速度は実際のアームの速度より速くなる傾向があるものの,MCによるブーム上げ制御の応答性は確保されるので,爪先の挙動を安定させることができる。
上記第2実施形態では時間t0,t1を固定の値としているが,アーム操作量の変化量に応じて時間t0,t1の値を可変としても良い。
Claims (5)
- 複数のフロント部材を有する作業装置と,
前記複数のフロント部材を駆動する複数の油圧アクチュエータと,
オペレータの操作に応じて前記複数の油圧アクチュエータの動作を指示する操作装置と,
前記操作装置の操作時に,前記複数の油圧アクチュエータの速度と予め定めた条件に従って前記複数の油圧アクチュエータの少なくとも1つを制御するアクチュエータ制御部を有する制御装置とを備える作業機械において,
前記複数のフロント部材の1つである特定フロント部材の姿勢に関する物理量を検出する姿勢検出装置と,
オペレータから前記操作装置に入力される操作量のうち前記特定フロント部材に対する操作量に関する物理量を検出する操作量検出装置とを備え,
前記制御装置は,
前記複数の油圧アクチュエータのうち前記特定フロント部材を駆動する特定油圧アクチュエータの第1速度を前記操作量検出装置の検出値から算出する第1速度演算部と,
前記特定油圧アクチュエータの第2速度を前記姿勢検出装置の検出値から算出する第2速度演算部と,
前記アクチュエータ制御部で前記特定油圧アクチュエータの速度として利用される第3速度を前記第1速度と前記第2速度に基づいて算出する第3速度演算部とを備え,
前記第3速度演算部は,
前記操作量検出装置にて前記特定フロント部材に対する操作が入力されたことが検出されてから第1の所定時間までの間,前記第1速度を前記第3速度として算出し,
前記第1の所定時間から前記第1の所定時間よりも大きな第2の所定時間までの間,前記第1速度と前記第2速度から算出される速度を前記第3速度として算出し,
前記第2の所定時間以降,前記第2速度を前記第3速度として算出する
ことを特徴とする作業機械。 - 請求項1の作業機械において,
前記第3速度演算部は,前記第1の所定時間から前記第2の所定時間までの間,時間の増加に応じて値が減少する第1の重み付関数を前記第1速度に乗じた値と,時間の増加に応じて値が増加する第2の重み付関数を前記第2速度に乗じた値との和を前記第3速度として算出する
ことを特徴とする作業機械。 - 請求項1の作業機械において,
前記第3速度演算部は,
前記操作量検出装置にて前記特定フロント部材に対する操作量の変化量が所定量以上であることが検出されてから第3の所定時間までの間,前記第1速度を前記第3速度として算出し,
前記第3の所定時間から前記第3の所定時間よりも大きな第4の所定時間までの間,前記第1速度と前記第2速度から算出される速度を前記第3速度として算出し,
前記第4の所定時間以降,前記第2速度を前記第3速度として算出する
ことを特徴とする作業機械。 - 請求項1の作業機械において,
前記特定油圧アクチュエータを駆動するための作動油温を検出する作動油温検出装置をさらに備え,
前記第1速度演算部は,前記作動油温検出装置によって検出された油温が所定値以下の場合,前記操作量検出装置の検出値から算出される速度よりも小さい速度を前記第1速度として算出する
ことを特徴とする作業機械。 - 請求項1の作業機械において,
前記特定フロント部材はアームであり,
前記特定油圧アクチュエータは前記アームを駆動するアームシリンダである
ことを特徴とする作業機械。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17922064.5A EP3683364B1 (en) | 2017-09-13 | 2017-09-13 | Work machinery |
| US16/328,398 US11001985B2 (en) | 2017-09-13 | 2017-09-13 | Work machine |
| PCT/JP2017/033077 WO2019053814A1 (ja) | 2017-09-13 | 2017-09-13 | 作業機械 |
| CN201780049325.0A CN109790698B (zh) | 2017-09-13 | 2017-09-13 | 作业机械 |
| KR1020197003398A KR102130562B1 (ko) | 2017-09-13 | 2017-09-13 | 작업 기계 |
| JP2019510390A JP6618652B2 (ja) | 2017-09-13 | 2017-09-13 | 作業機械 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/033077 WO2019053814A1 (ja) | 2017-09-13 | 2017-09-13 | 作業機械 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019053814A1 true WO2019053814A1 (ja) | 2019-03-21 |
Family
ID=65722583
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/033077 WO2019053814A1 (ja) | 2017-09-13 | 2017-09-13 | 作業機械 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11001985B2 (ja) |
| EP (1) | EP3683364B1 (ja) |
| JP (1) | JP6618652B2 (ja) |
| KR (1) | KR102130562B1 (ja) |
| CN (1) | CN109790698B (ja) |
| WO (1) | WO2019053814A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021025258A (ja) * | 2019-08-01 | 2021-02-22 | 住友重機械工業株式会社 | ショベル |
| JP2021055427A (ja) * | 2019-09-30 | 2021-04-08 | 日立建機株式会社 | 建設機械 |
| WO2022201905A1 (ja) | 2021-03-26 | 2022-09-29 | 日立建機株式会社 | 作業機械 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3450634B1 (en) | 2017-08-30 | 2021-03-03 | Topcon Positioning Systems, Inc. | Method and apparatus for machine operator command attenuation |
| JP6912356B2 (ja) * | 2017-11-13 | 2021-08-04 | 日立建機株式会社 | 建設機械 |
| EP3783155B1 (en) * | 2018-04-17 | 2022-12-14 | Hitachi Construction Machinery Co., Ltd. | Work machine |
| WO2020101006A1 (ja) * | 2018-11-14 | 2020-05-22 | 住友重機械工業株式会社 | ショベル、ショベルの制御装置 |
| JP7252762B2 (ja) * | 2019-01-08 | 2023-04-05 | 日立建機株式会社 | 作業機械 |
| US11828040B2 (en) * | 2019-09-27 | 2023-11-28 | Topcon Positioning Systems, Inc. | Method and apparatus for mitigating machine operator command delay |
| JP7149917B2 (ja) * | 2019-09-30 | 2022-10-07 | 日立建機株式会社 | 作業機械 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02176023A (ja) * | 1988-12-27 | 1990-07-09 | Komatsu Ltd | 建設機械のバケット刃先深さ制御装置 |
| JPH09273502A (ja) * | 1996-04-01 | 1997-10-21 | Sumitomo Constr Mach Co Ltd | 建設機械のハンチング防止回路 |
| JP5865510B2 (ja) | 2014-09-10 | 2016-02-17 | 株式会社小松製作所 | 作業車両および作業車両の制御方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2566745B2 (ja) * | 1994-04-29 | 1996-12-25 | 三星重工業株式会社 | 電子制御油圧掘削機の自動平坦作業方法 |
| US5960378A (en) * | 1995-08-14 | 1999-09-28 | Hitachi Construction Machinery Co., Ltd. | Excavation area setting system for area limiting excavation control in construction machines |
| JP3811190B2 (ja) * | 1997-06-20 | 2006-08-16 | 日立建機株式会社 | 建設機械の領域制限掘削制御装置 |
| JP4444884B2 (ja) | 2005-06-28 | 2010-03-31 | 日立建機株式会社 | 建設機械および建設機械に用いられる制御装置 |
| US7530225B2 (en) * | 2006-05-23 | 2009-05-12 | Volvo Construction Equipment Holding Sweden Ab | Apparatus for increasing operation speed of boom on excavators |
| US9119348B2 (en) * | 2010-03-29 | 2015-09-01 | Deere & Company | Tractor-implement control system and method |
| JP6244459B2 (ja) * | 2014-06-26 | 2017-12-06 | 日立建機株式会社 | 作業機械 |
| WO2015025986A1 (ja) * | 2014-09-10 | 2015-02-26 | 株式会社小松製作所 | 作業車両 |
| JP6291394B2 (ja) * | 2014-10-02 | 2018-03-14 | 日立建機株式会社 | 作業機械の油圧駆動システム |
| JP6692568B2 (ja) * | 2015-01-06 | 2020-05-13 | 住友重機械工業株式会社 | 建設機械 |
| US9834905B2 (en) * | 2015-09-25 | 2017-12-05 | Komatsu Ltd. | Work machine control device, work machine, and work machine control method |
| WO2016111384A1 (ja) * | 2016-02-29 | 2016-07-14 | 株式会社小松製作所 | 作業機械の制御装置、作業機械及び作業機械の制御方法 |
| WO2016186219A1 (ja) * | 2016-05-31 | 2016-11-24 | 株式会社小松製作所 | 建設機械の制御システム、建設機械、及び建設機械の制御方法 |
| JP6564739B2 (ja) * | 2016-06-30 | 2019-08-21 | 日立建機株式会社 | 作業機械 |
-
2017
- 2017-09-13 KR KR1020197003398A patent/KR102130562B1/ko active IP Right Grant
- 2017-09-13 US US16/328,398 patent/US11001985B2/en active Active
- 2017-09-13 JP JP2019510390A patent/JP6618652B2/ja active Active
- 2017-09-13 EP EP17922064.5A patent/EP3683364B1/en active Active
- 2017-09-13 CN CN201780049325.0A patent/CN109790698B/zh active Active
- 2017-09-13 WO PCT/JP2017/033077 patent/WO2019053814A1/ja unknown
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02176023A (ja) * | 1988-12-27 | 1990-07-09 | Komatsu Ltd | 建設機械のバケット刃先深さ制御装置 |
| JPH09273502A (ja) * | 1996-04-01 | 1997-10-21 | Sumitomo Constr Mach Co Ltd | 建設機械のハンチング防止回路 |
| JP5865510B2 (ja) | 2014-09-10 | 2016-02-17 | 株式会社小松製作所 | 作業車両および作業車両の制御方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3683364A4 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021025258A (ja) * | 2019-08-01 | 2021-02-22 | 住友重機械工業株式会社 | ショベル |
| JP7412918B2 (ja) | 2019-08-01 | 2024-01-15 | 住友重機械工業株式会社 | ショベル |
| JP2021055427A (ja) * | 2019-09-30 | 2021-04-08 | 日立建機株式会社 | 建設機械 |
| JP7083326B2 (ja) | 2019-09-30 | 2022-06-10 | 日立建機株式会社 | 建設機械 |
| WO2022201905A1 (ja) | 2021-03-26 | 2022-09-29 | 日立建機株式会社 | 作業機械 |
| KR20230051283A (ko) | 2021-03-26 | 2023-04-17 | 히다찌 겐끼 가부시키가이샤 | 작업 기계 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3683364A1 (en) | 2020-07-22 |
| US11001985B2 (en) | 2021-05-11 |
| KR20190034220A (ko) | 2019-04-01 |
| KR102130562B1 (ko) | 2020-07-06 |
| EP3683364B1 (en) | 2022-08-03 |
| CN109790698A (zh) | 2019-05-21 |
| JP6618652B2 (ja) | 2019-12-11 |
| CN109790698B (zh) | 2021-04-23 |
| US20200157768A1 (en) | 2020-05-21 |
| EP3683364A4 (en) | 2021-05-12 |
| JPWO2019053814A1 (ja) | 2019-11-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6618652B2 (ja) | 作業機械 | |
| US11053661B2 (en) | Work machine | |
| JP6889806B2 (ja) | 作業機械 | |
| JP6889579B2 (ja) | 作業機械 | |
| KR102154581B1 (ko) | 작업 기계 | |
| JP6860329B2 (ja) | 作業機械 | |
| KR20200028993A (ko) | 작업 기계 | |
| KR102588223B1 (ko) | 작업 기계 | |
| WO2020179346A1 (ja) | 作業機械 | |
| JP7096425B2 (ja) | 作業機械 | |
| WO2023053900A1 (ja) | 作業機械 | |
| JP7269411B2 (ja) | 作業機械 | |
| WO2020065739A1 (ja) | 作業機械 | |
| WO2021065952A1 (ja) | 作業機械 | |
| JP7083326B2 (ja) | 建設機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 20197003398 Country of ref document: KR Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2019510390 Country of ref document: JP Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17922064 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2017922064 Country of ref document: EP Effective date: 20200414 |