WO2019043991A1 - アブレーションシステム - Google Patents
アブレーションシステム Download PDFInfo
- Publication number
- WO2019043991A1 WO2019043991A1 PCT/JP2018/005775 JP2018005775W WO2019043991A1 WO 2019043991 A1 WO2019043991 A1 WO 2019043991A1 JP 2018005775 W JP2018005775 W JP 2018005775W WO 2019043991 A1 WO2019043991 A1 WO 2019043991A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- ablation
- power supply
- breaks
- control unit
- threshold
- Prior art date
Links
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1477—Needle-like probes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
- A61B18/1233—Generators therefor with circuits for assuring patient safety
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00005—Cooling or heating of the probe or tissue immediately surrounding the probe
- A61B2018/00011—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids
- A61B2018/00023—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids closed, i.e. without wound contact by the fluid
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00529—Liver
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00595—Cauterization
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00642—Sensing and controlling the application of energy with feedback, i.e. closed loop control
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00666—Sensing and controlling the application of energy using a threshold value
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00666—Sensing and controlling the application of energy using a threshold value
- A61B2018/00678—Sensing and controlling the application of energy using a threshold value upper
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00702—Power or energy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00702—Power or energy
- A61B2018/00708—Power or energy switching the power on or off
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00714—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00744—Fluid flow
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00875—Resistance or impedance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00898—Alarms or notifications created in response to an abnormal condition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/0091—Handpieces of the surgical instrument or device
- A61B2018/00916—Handpieces of the surgical instrument or device with means for switching or controlling the main function of the instrument or device
- A61B2018/00922—Handpieces of the surgical instrument or device with means for switching or controlling the main function of the instrument or device by switching or controlling the treatment energy directly within the hand-piece
Definitions
- the present invention relates to an ablation system provided with an electrode needle which is percutaneously punctured with respect to an affected area in the body, and a power supply device for supplying electric power for ablation (cauterization).
- an ablation system As one of medical devices for treating an affected area in a patient's body (for example, an affected area having a tumor such as cancer), an ablation system has been proposed in which such affected area is ablated (eg, Patent Document 1) reference).
- the ablation system includes an electrode needle which is percutaneously punctured to an affected area in the body, and a power supply which supplies power for ablation of the affected area.
- an ablation system comprising: an electrode needle percutaneously pierced with respect to an affected area in a body; and a power supply for supplying power for ablation between the electrode needle and a return electrode. And a control unit for controlling the power supply operation of the power supply unit.
- the control unit measures an impedance value between the electrode needle and the return electrode at the time of ablation, and counts the number of breaks which is the number of break states in which the impedance value exceeds the first threshold. When the number of times reaches the second threshold, the ablation is automatically ended by automatically stopping the supply of power.
- the control unit counts the number of breaks, and when the number of breaks reaches the second threshold, the power supply unit automatically supplies power. Ablation is automatically terminated by stopping. Thereby, for example, as compared with the case where ablation is manually ended after visually checking the number of breaks, or when ablation is automatically terminated after a predetermined waiting time has elapsed without confirming the number of breaks, etc. Effective ablation can be performed easily.
- the power supply device may further include a display unit that displays a count value of the number of breaks.
- the operator or the like of the power supply apparatus can grasp the count value of the number of breaks as needed, which further improves the convenience.
- the control unit when the control unit is in the break state, the control unit counts the number of breaks and temporarily reduces or stops the supply of power, and the number of breaks is the number of breaks. If the second threshold is not reached, the supply of power may be automatically resumed (first operation mode). In this case (when the first operation mode is executed), the resumption of power supply is also performed automatically, so a series of processing from the start to the end of ablation is automatically performed. As a result, the convenience is further improved.
- control unit when the control unit is in a break state, it counts the number of breaks and temporarily reduces or stops the supply of power, and when the number of breaks does not reach the second threshold, The supply of power may be resumed based on an operation signal input in response to an operation by the operator (second operation mode).
- second operation mode when the second operation mode is performed, the restart of the power supply itself is performed manually, so that it is possible to adjust the restart timing of the power supply as needed, for example. Therefore, also in this case, the convenience can be further improved.
- the first operation mode and the second operation mode may be switchable. In this case, when the power supply is resumed, these two types of operation modes can be switched as needed according to, for example, the application, the situation, and the like, so that the convenience can be further improved.
- a liquid supply device for supplying a cooling liquid to the electrode needle is further provided, and the control unit determines that the number of breaks has reached the second threshold value.
- the supply of the liquid may be automatically stopped after the ablation is automatically ended.
- the liquid supply stop can be realized at an appropriate timing as compared with the case where the liquid supply is manually stopped after the end of the ablation.
- the control unit counts the number of breaks, and when the number of breaks reaches the second threshold, the power supply unit automatically supplies power. Since the ablation is automatically terminated by stopping it, effective ablation can be easily performed. Therefore, it is possible to improve the convenience when using the ablation system.
- FIG. 1 is a block diagram schematically showing an entire configuration example of an ablation system according to an embodiment of the present invention. It is a schematic diagram showing an example of the abduction condition in the affected part by ablation. It is a timing diagram which represents typically an example of the break state and the number of breaks in the case of ablation. It is a flow chart showing an example of processing of ablation concerning an embodiment. It is a schematic diagram showing an example of the display mode in the display part in the case of ablation shown in FIG.
- FIG. 5 is a diagram showing an example of an operation mode at the time of resumption of power supply shown in FIG.
- FIG. 1 is a schematic block diagram showing an example of the overall configuration of an ablation system (ablation system 5) according to an embodiment of the present invention.
- the ablation system 5 is a system used when treating an affected area 90 in the body of the patient 9, and performs predetermined ablation on such affected area 90.
- the affected part which has tumors such as cancer (a liver cancer, lung cancer, a breast cancer, a kidney cancer, a thyroid cancer etc.), is mentioned, for example.
- the ablation system 5 includes an electrode needle 1, a liquid supply device 2 and a power supply device 3 as shown in FIG. Further, in the case of ablation using this ablation system 5, for example, the return electrode plate 4 shown in FIG. 1 is also appropriately used.
- the electrode needle 1 is, for example, a needle that is percutaneously punctured with respect to an affected area 90 in the body of the patient 9, as indicated by an arrow P1 in FIG.
- the electrode needle 1 is used at the time of the above-described ablation, and has, for example, an electrode portion 11 and a covering portion 12 as shown in FIG.
- the liquid L supplied from the liquid supply apparatus 2 mentioned later circulates and flows inside such an electrode needle 1 (refer FIG. 1).
- the electrode portion 11 is a region portion of the needle-like structure constituting the electrode needle 1 which is not coated with an insulating coating, and is a portion functioning as an electrode at the time of ablation.
- the covering portion 12 is an area portion of the above-described needle-like structure on which the insulating covering is provided. As shown in FIG. 1, the electrode portion 11 is disposed in the vicinity of the tip of the electrode needle 1, and the covering portion 12 is disposed on the proximal end side of the electrode portion 11.
- the liquid supply device 2 is a device for supplying the liquid L for cooling to the electrode needle 1 described above, and includes, for example, a liquid supply unit 21 as shown in FIG.
- a liquid supply unit 21 as shown in FIG.
- the liquid L for cooling for example, sterile water, sterile saline and the like can be mentioned.
- the liquid supply unit 21 supplies the above-described liquid L to the electrode needle 1 as needed according to control by a control signal CTL2 described later.
- the liquid supply unit 21 is configured to allow the liquid L to circulate between the inside of the liquid supply device 2 and the inside of the electrode needle 1 (within a predetermined flow path).
- the liquid L is supplied.
- such a liquid L supply operation is performed or stopped under the control of the control signal CTL2 described above.
- such a liquid supply part 21 is comprised including the liquid pump etc., for example.
- the power supply device 3 supplies a power Pout (for example, a power of radio frequency (RF) power) for performing ablation between the electrode needle 1 and the return electrode plate 4 and generates the liquid L in the liquid supply device 2 described above. It is an apparatus which controls supply operation. As shown in FIG. 1, the power supply device 3 includes an input unit 31, a power supply unit 32, a control unit 33, and a display unit 34.
- a power Pout for example, a power of radio frequency (RF) power
- RF radio frequency
- the input unit 31 is a portion for inputting various setting values and an instruction signal (operation signal Sm) for instructing a predetermined operation to be described later.
- Such an operation signal Sm is input from the input unit 31 in accordance with an operation by an operator (for example, a technician or the like) of the power supply device 3.
- these various set values may not be input according to the operation by the operator, but may be set in advance in the power supply device 3 at the time of shipping the product, for example.
- the setting value input by the input unit 31 is supplied to the control unit 33 described later.
- such an input unit 31 is configured using, for example, a predetermined dial, button, touch panel or the like.
- the power supply unit 32 is a portion that supplies the power Pout described above between the electrode needle 1 and the return electrode plate 4 in accordance with a control signal CTL1 described later.
- a power supply unit 32 is configured using a predetermined power supply circuit (for example, a switching regulator or the like).
- the frequency is, for example, about 450 kHz to 550 kHz (for example, 500 kHz).
- the control unit 33 is a part that controls the entire power supply device 3 and performs predetermined arithmetic processing, and is configured using, for example, a microcomputer or the like. Specifically, the control unit 33 first has a function (power supply control function) of controlling the supply operation of the power Pout in the power supply unit 32 using the control signal CTL1. The control unit 33 also has a function (liquid supply control function) of controlling the supply operation of the liquid L in the liquid supply device 2 (liquid supply unit 21) using the control signal CTL2.
- Temperature information It measured in the electrode needle 1 (temperature sensor such as a thermocouple or the like disposed inside the electrode unit 11) is also supplied to the control unit 33 as needed, for example, as shown in FIG. It has become so. Further, for example, as shown in FIG. 1, the control unit 33 is supplied with the measured value of the impedance value Z (described later) from the power supply unit 32 as needed.
- control unit 33 The details of the control operation and the like in the control unit 33, including the power supply control function and the liquid supply control function described above, will be described later (FIGS. 4 to 6).
- the display unit 34 is a part (monitor) that displays various types of information and outputs the information to the outside.
- information to be displayed for example, the various setting values described above input from the input unit 31, various parameters supplied from the control unit 33 (for example, the count value of the number of breaks Nb to be described later, etc.)
- the supplied temperature information It may be mentioned.
- the information to be displayed is not limited to these pieces of information, and other information may be displayed instead by adding other information.
- Such a display unit 34 is configured using displays of various types (for example, a liquid crystal display, a CRT (Cathode Ray Tube) display, an organic EL (Electro Luminescence) display, and the like).
- the return electrode plate 4 is used in a state of being attached to the body surface of the patient 9 at the time of ablation.
- high frequency conduction power Pout is supplied
- the impedance value Z between the electrode needle 1 (electrode portion 11) and the return electrode plate 4 is measured at any time and measured.
- the impedance value Z is supplied from the power supply unit 32 to the control unit 33 in the power supply device 3.
- the liquid supply device 2 (coolant L) is circulated between the inside of the liquid supply device 2 and the inside of the electrode needle 1 (within the predetermined flow path).
- the liquid L is supplied from the liquid supply unit 21) to the electrode needle 1 (see FIG. 1).
- a cooling operation (cooling) is performed on the electrode needle 1 at the time of ablation.
- the tissue temperature of the affected area 90 is sufficiently raised based on the temperature information It measured at the electrode needle 1 etc. The burn condition is confirmed.
- FIG. 2 schematically shows an example of the degree of ablation at the affected part 90 due to such ablation.
- the initial lag-bi-ball (elliptical-spherical) thermal coagulation area Ah1 gradually expands.
- a substantially spherical thermally solidified region Ah2 is obtained (see the broken arrow in FIG. 2).
- isotropic ablation of the entire affected area 90 is performed, resulting in effective treatment of the affected area 90.
- FIG. 3 schematically shows an example of the break state and the number of breaks during ablation in a timing diagram.
- FIG. 3 an example of a measurement waveform of the impedance value Z between the electrode needle 1 (the electrode portion 11) and the return electrode plate 4 is shown along the time axis.
- the threshold value Zth of the impedance value Z shown in FIG. 3 corresponds to a specific example of the “first threshold value” in the present invention.
- the impedance value Z rapidly increases due to evaporation of water in the tissue in the affected area 90.
- Such a rapid rise (impedance rise) of the impedance value Z serves as an index of thermal coagulation of the tissue in the affected area 90, and thus serves as an indication of the stop timing at the time of ablation.
- a state in which the impedance value Z exceeds a predetermined threshold Zth (Z> Zth) is called a "break state" (see FIG. 3).
- ablation supply of power Pout
- ablation supply of power Pout
- the impedance value Z decreases again (see FIG. 3).
- the treatment to the affected part 90 is made by repeating such intermittent ablation several times.
- a predetermined time set in advance for example, about 10 seconds to about 15 seconds
- the ablation state is temporarily stopped three times at timings t1, t2, and t3 as time passes.
- the count of the number of breaks Nb may become inaccurate due to, for example, oversight of the break state. There is also the risk that it will cost extra.
- the transition to the second and subsequent break states is generally performed in a short time (see FIG. 3), it can be said that such a risk is very high.
- the number of breaks Nb may be increased more than necessary (for example, four times or more) within the ablation time. From these things, in the said comparative examples 1 and 2, as a result of the break part being given more than necessary to the affected part 90 at the time of the treatment by ablation, the pain which the patient 9 feels becomes large. The burden on the patient 9 may also be increased.
- this pain means the pain felt by the patient 9 at the time of treatment, and it is said that, for example, the right shoulder etc. often ache as a related pain through the spinal nerve.
- the impedance value Z rapidly rises, and therefore, when the power Pout is output, for example, as the constant power, the output voltage also rises rapidly.
- the temperature at the affected area 90 also tends to rise. Therefore, it is said that this pain has both electrical and thermal factors.
- FIG. 4 is a flowchart showing an example of ablation processing in the ablation system 5 of the present embodiment.
- the above-described threshold Zth (the threshold of the impedance value Z) and the threshold Nth (the threshold of the number of breaks Nb) described later are set (step S10 in FIG. 4).
- the set values of the threshold value Zth and the threshold value Nth are respectively input from the input unit 31 according to the operation by the operator of the power supply device 3 and supplied to the control unit 33.
- the threshold Nth corresponds to a specific example of the “second threshold” in the present invention.
- a method of defining the relative value a method of defining the impedance value Z at the start of ablation as a reference and a method of defining the minimum value of the impedance value Z after the initiation of ablation as the reference can be mentioned. Note that, as described above, such set values of the threshold Zth and the threshold Nth are not input according to the operation by the operator, but are set in advance in the power supply device 3, for example, when the product is shipped. It may be made to be.
- the power Pout is supplied from the power supply device 3 (power supply unit 32) between the electrode needle 1 and the return electrode plate 4 to start ablation of the affected part 90 (step S11).
- the start of the ablation is performed by the operation signal Sm being input from the input unit 31 and being supplied to the control unit 33 according to the operation by the operator of the power supply device 3. That is, in this example, ablation is manually initiated.
- the power supply unit 32 first measures the impedance value Z between the electrode needle 1 and the return electrode 4 (step S12). In other words, the control unit 33 acquires such measurement information of the impedance value Z. Then, when the impedance value Z measured in this manner is supplied from the power supply unit 32 to the control unit 33, the control unit 33 next performs the following determination. That is, control unit 33 determines whether this impedance value Z is larger than threshold value Zth set in step S10 (whether Z> Zth is satisfied) (step S13).
- step S13: N if it is determined that the impedance value Z is less than or equal to the threshold value Zth (Z> Zth is not satisfied) (step S13: N), the process returns to step S12 described above, and measurement of the impedance value Z is again performed It will be.
- step S13: Y when it is determined that the impedance value Z is larger than the threshold Zth (Z> Zth is satisfied) (step S13: Y), it means that the above-described break state is reached. Therefore, in this case, next, the control unit 33 automatically counts the number of breaks (break number Nb) (step S14).
- the count value of the number of breaks Nb is stored, for example, in various storage media in the control unit 33 as needed.
- the count value or the like of the break number Nb is displayed on the display unit 34 of the power supply 3 as needed, as schematically shown in FIG. 5, for example.
- the display unit 34 first, as schematically shown in FIG. 3 described above, the measured waveform of the impedance value Z is displayed along the time axis (symbols in FIG. 5) See P20).
- the current value (Impedance: refer to code P21) of the impedance value Z, the temperature information It (Temperature: refer to code P22) described above, and the output value of the power Pout (Power: code P23). Reference) and information on ablation time (Ablation Time: see code P24) are displayed respectively.
- the count value of the number of breaks Nb is displayed together with the current value (see the code P21) of the impedance value Z.
- control unit 33 temporarily stops the ablation by temporarily decreasing or stopping the supply of the power Pout from the power supply unit 32 using the control signal CTL1 described above (step S15).
- the impedance value Z is lowered again and the break state is left.
- control unit 33 determines whether the number of breaks Nb counted in step S14 is equal to or more than the threshold Nth set in step S10 (whether Nb Nb Nth is satisfied) (step S16). ). If it is determined that the number of breaks Nb is less than the threshold Nth (not satisfying Nb N Nth) (step S16: N), then the supply (ablation) of the power Pout is resumed automatically or manually. (Step S17).
- FIG. 6 shows an example of the operation mode at the time of the supply resumption of the power Pout (step S17).
- the operation mode at this time there are, for example, two types of operation modes of "full auto mode” and "semi-auto mode".
- the full auto mode corresponds to one specific example of the "first operation mode” in the present invention
- the semi-auto mode corresponds to one specific example of the "second operation mode” in the present invention.
- step S16 when the number of breaks Nb has not reached the threshold Nth (step S16: N), the controller 33 automatically resumes the supply (ablation) of the power Pout (step S17). Specifically, control unit 33 automatically resumes the supply of power Pout from power supply unit 32 using control signal CTL1 described above. That is, in the full auto mode, the supply of the power Pout is automatically resumed.
- step S16 N
- the control unit 33 is selected based on the operation signal Sm input according to the operation by the operator of the power supply device 3.
- such two types of operation modes (“full auto mode” and “semi auto mode”) may be switchable (shown in FIG. 6). See dashed arrow P3). That is, for example, based on the operation signal Sm input according to the operation by the operator of the power supply device 3, these two types of operation modes may be switched as needed.
- the process returns to step S12 described above, and the measurement of the impedance value Z is performed again.
- the impedance value Z can be continuously measured even in the above-described break state.
- the supply of the power Pout is temporarily “stopped” in step S15, measurement of the impedance value Z is not performed in the break state.
- step S16: Y if it is determined in step S16 described above that the number of breaks Nb is equal to or greater than the threshold Nth (Nb N Nth is satisfied) (step S16: Y), the control unit 33 performs the following control Do. That is, when the number of breaks Nb reaches the threshold Nth (step S16: Y), the control unit 33 automatically stops (completely stops) the supply of the power Pout from the power supply unit 32, thereby automatically performing ablation. (Step S18). Specifically, the control unit 33 automatically stops the supply of the power Pout using the control signal CTL1 described above. Thereby, the ablation on the affected part 90 is automatically ended by the control unit 33.
- control unit 33 automatically stops the supply of the cooling liquid L from the liquid supply device 2 after automatically terminating the ablation (step S18) in this manner (step S19). . Specifically, the control unit 33 automatically stops the supply of the liquid L from the liquid supply unit 21 using the control signal CTL2 described above. Thereby, the circulation of the liquid L between the inside of the liquid supply device 2 and the inside of the electrode needle 1 is stopped (see FIG. 1), and the cooling operation (cooling) on the electrode needle 1 is stopped. This is the end of the series of processes shown in FIG. 4 (process example of ablation according to the present embodiment).
- the control unit 33 performs the following control at the time of ablation. That is, first, the control unit 33 measures the impedance value Z between the electrode needle 1 and the return electrode plate 4 (Step S12 in FIG. 4), and the number of break states where the impedance value Z exceeds the threshold Zth ( The number of breaks Nb) is counted (step S14). Then, when the number of breaks Nb reaches the threshold Nth, the control unit 33 automatically stops the supply of the power Pout to automatically terminate the ablation (step S18).
- the present embodiment it is as follows. That is, for example, as described above, when manually terminating ablation after confirming the number of breaks Nb visually (Comparative Example 1), or after a predetermined waiting time has elapsed without confirming the number of breaks Nb Effective ablation can be easily performed as compared with the case where ablation is automatically terminated (Comparative Example 2) or the like. Therefore, in the present embodiment, the convenience when using the ablation system 5 can be improved as compared with the comparative examples 1 and 2 and the like.
- the display unit 34 for displaying the count value of the number of breaks Nb is provided in the power supply device 3 (see FIG. 5). People will be able to grasp at any time. Thus, the convenience can be further improved.
- the control unit 33 automatically restarts (“full auto shown in FIG. In the case of executing “mode”, it becomes as follows. That is, in the "full mode", the supply of power Pout is also automatically resumed, so a series of processes from the start to the end of the ablation (each process of steps S12 to S19 in FIG. 4) Will be done automatically. Thus, the convenience can be further improved.
- these two types of operation modes can be switched (see arrow P3 in FIG. 6). become that way. That is, when the supply (ablation) of the power Pout is restarted (step S17 in FIG. 4), these two types of modes can be switched as needed according to, for example, the application, the situation, and the like. Thus, the convenience can be further improved.
- the control unit 33 automatically stops the supply of the liquid L after automatically terminating the ablation (step S18 in FIG. 4). Since it has been made to do (Step S19), it becomes as follows. That is, for example, the supply stop of the liquid L can be realized at an appropriate timing as compared with the case where the supply of the liquid L is manually stopped after the end of the ablation (Comparative Example 3). As a result, the possibility that the affected area 90 (tissue) after ablation is cooled more than necessary by the liquid L is avoided, and the ablation condition of the affected area 90 can be checked more accurately. Therefore, in the present embodiment, it is possible to further improve the convenience as compared with Comparative Example 3 described above.
- each member demonstrated in the said embodiment are not limited, It is good also as another material.
- the structure of the electrode needle 1 was mentioned concretely and demonstrated, it is not necessary to necessarily provide all the members and may further provide another member.
- the values and ranges of the various parameters described in the above embodiment, and the magnitude relationship are not limited to those described in the above embodiment, and other values, ranges, magnitude relationships, and the like may be used.
- the block configurations of the liquid supply device 2 and the power supply device 3 have been specifically described, but it is not necessary to include all the blocks described in the above embodiment. It may further comprise a block. Further, the ablation system 5 as a whole may further include other devices in addition to the devices described in the above embodiment.
- the control operation (a method of ablation) in the control unit 33 including the power supply control function and the liquid supply control function has been specifically described.
- the control method (ablation method) in the power supply control function and the liquid supply control function and the like is not limited to the method described in the above embodiment.
- the series of processes described in the above embodiment may be performed by hardware (circuit) or may be performed by software (program).
- the software is configured by a group of programs for causing a computer to execute each function.
- each program may be incorporated in advance in the computer and used, or may be installed and used in the computer from a network or a recording medium.
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Otolaryngology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Plasma & Fusion (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Abstract
利便性を向上させることが可能なアブレーションシステムを提供する。アブレーションシステム5は、体内の患部90に対して経皮的に穿刺される電極針1と、この電極針1と対極板4との間にアブレーションを行うための電力Poutを供給する電源部32と、この電源部32における電力Poutの供給動作を制御する制御部33とを有する電源装置3とを備えている。制御部33は、アブレーションの際に、電極針1と対極板4との間のインピーダンス値Zを測定すると共に、このインピーダンス値Zが閾値Zth(第1閾値)を越えたブレイク状態の回数(ブレイク回数Nb)をカウントし、このブレイク回数Nbが閾値Nth(第2閾値)に到達した場合には、電力Poutの供給を自動的に停止させることにより、アブレーションを自動的に終了させる。
Description
本発明は、体内の患部に対して経皮的に穿刺される電極針と、アブレーション(焼灼)を行うための電力を供給する電源装置とを備えたアブレーションシステムに関する。
患者体内の患部(例えば癌などの腫瘍を有する患部)を治療するための医療機器の1つとして、そのような患部に対してアブレーションを行う、アブレーションシステムが提案されている(例えば、特許文献1参照)。このアブレーションシステムは、体内の患部に対して経皮的に穿刺される電極針と、患部に対するアブレーションを行うための電力を供給する電源装置とを備えている。
ところで、このようなアブレーションシステムでは一般に、例えば、使用する際の利便性を向上することが求められている。したがって、利便性を向上させることが可能なアブレーションシステムを提供することが望ましい。
本発明の一実施の形態に係るアブレーションシステムは、体内の患部に対して経皮的に穿刺される電極針と、この電極針と対極板との間にアブレーションを行うための電力を供給する電源部と、この電源部における電力の供給動作を制御する制御部とを有する電源装置とを備えたものである。上記制御部は、アブレーションの際に、電極針と対極板との間のインピーダンス値を測定すると共に、このインピーダンス値が第1閾値を越えたブレイク状態の回数であるブレイク回数をカウントし、このブレイク回数が第2閾値に到達した場合には、電力の供給を自動的に停止させることにより、アブレーションを自動的に終了させるようになっている。
本発明の一実施の形態に係るアブレーションシステムでは、制御部において上記ブレイク回数がカウントされると共に、このブレイク回数が上記第2閾値に到達した場合には、電源部からの電力供給が自動的に停止されることで、アブレーションが自動的に終了する。これにより、例えば、ブレイク回数を目視等で確認してからアブレーションを手動で終了させる場合や、ブレイク回数を確認せずに所定の待機時間が経過してからアブレーションを自動終了させる場合などと比べ、効果的なアブレーションが容易に実施できるようになる。
本発明の一実施の形態に係るアブレーションシステムでは、上記電源装置が、ブレイク回数のカウント値を表示する表示部を更に有するようにしてもよい。このようにした場合、ブレイク回数のカウント値を、電源装置の操作者等が随時把握できるようになるため、利便性が更に向上する。
本発明の一実施の形態に係るアブレーションシステムでは、上記制御部が、ブレイク状態となった場合には、ブレイク回数をカウントすると共に電力の供給を一時的に低下または停止させ、ブレイク回数が上記第2閾値に到達していない場合には、電力の供給を自動的に再開させるようにしてもよい(第1の動作モード)。このようにした場合(上記第1の動作モードを実行するようにした場合)、電力供給の再開も自動的に行われることから、アブレーションが開始されてから終了までの一連の処理が自動的になされるようになるため、利便性の更なる向上が図られる。
あるいは、上記制御部が、ブレイク状態となった場合には、ブレイク回数をカウントすると共に電力の供給を一時的に低下または停止させ、ブレイク回数が上記第2閾値に到達していない場合には、操作者による操作に応じて入力される操作信号に基づいて、電力の供給を再開させるようにしてもよい(第2の動作モード)。このようにした場合(上記第2の動作モードを実行するようにした場合)、電力供給の再開自体は手動で行われることから、例えば、電力供給の再開タイミングを随時調整することが可能となるため、この場合も、利便性の更なる向上が図られる。
また、上記電源装置において、上記第1の動作モードと上記第2の動作モードとが、切り替え可能になっているようにしてもよい。このようにした場合、電力供給を再開する際に、例えば用途や状況等に応じて、これら2種類の動作モードを随時切り替えることができるため、利便性の更なる向上が図られる。
本発明の一実施の形態に係るアブレーションシステムでは、上記電極針に対して冷却用の液体を供給する液体供給装置を更に設けると共に、上記制御部が、ブレイク回数が上記第2閾値に到達した場合に、アブレーションを自動的に終了させた後に上記液体の供給も自動的に停止させるようにしてもよい。このようにした場合、例えば、アブレーションの終了後に液体の供給を手動で停止させる場合と比べ、適切なタイミングでの液体供給停止が実現されるようになる。その結果、アブレーション後の患部(組織)が液体によって必要以上に冷却されてしまうおそれが回避され、患部の焼灼具合をより正確に確認できるようになることから、利便性の更なる向上が図られる。
本発明の一実施の形態に係るアブレーションシステムによれば、制御部において上記ブレイク回数をカウントすると共に、このブレイク回数が上記第2閾値に到達した場合には、電源部からの電力供給を自動的に停止させることによってアブレーションを自動的に終了させるようにしたので、効果的なアブレーションを容易に実施することができる。よって、アブレーションシステムを使用する際の利便性を向上させることが可能となる。
以下、本発明の実施の形態について、図面を参照して詳細に説明する。なお、説明は以下の順序で行う。
1.実施の形態(電源装置内の制御部においてブレイク回数の自動カウント等を行う例)
2.変形例
1.実施の形態(電源装置内の制御部においてブレイク回数の自動カウント等を行う例)
2.変形例
<1.実施の形態>
[構成]
図1は、本発明の一実施の形態に係るアブレーションシステム(アブレーションシステム5)の全体構成例を、模式的にブロック図で表したものである。このアブレーションシステム5は、例えば図1に示したように、患者9の体内における患部90を治療する際に用いられるシステムであり、そのような患部90に対して所定のアブレーションを行うようになっている。なお、上記した患部90としては、例えば、癌(肝癌,肺癌,乳癌,腎臓癌,甲状腺癌など)等の腫瘍を有する患部が挙げられる。
[構成]
図1は、本発明の一実施の形態に係るアブレーションシステム(アブレーションシステム5)の全体構成例を、模式的にブロック図で表したものである。このアブレーションシステム5は、例えば図1に示したように、患者9の体内における患部90を治療する際に用いられるシステムであり、そのような患部90に対して所定のアブレーションを行うようになっている。なお、上記した患部90としては、例えば、癌(肝癌,肺癌,乳癌,腎臓癌,甲状腺癌など)等の腫瘍を有する患部が挙げられる。
アブレーションシステム5は、図1に示したように、電極針1、液体供給装置2および電源装置3を備えている。また、このアブレーションシステム5を用いたアブレーションの際には、例えば図1に示した対極板4も、適宜使用されるようになっている。
(A.電極針1)
電極針1は、例えば図1中の矢印P1で示したように、患者9の体内における患部90に対して、経皮的に穿刺される針である。この電極針1は、上記したアブレーションの際に使用されるものであり、例えば図1に示したように、電極部11および被覆部12を有している。なお、このような電極針1の内部には、後述する液体供給装置2から供給される液体Lが、循環して流れるようになっている(図1参照)。
電極針1は、例えば図1中の矢印P1で示したように、患者9の体内における患部90に対して、経皮的に穿刺される針である。この電極針1は、上記したアブレーションの際に使用されるものであり、例えば図1に示したように、電極部11および被覆部12を有している。なお、このような電極針1の内部には、後述する液体供給装置2から供給される液体Lが、循環して流れるようになっている(図1参照)。
電極部11は、電極針1を構成する針状構造体のうち、絶縁性の被覆がなされてない領域部分であり、アブレーションの際の電極として機能する部分である。被覆部12は、上記した針状構造体のうち、絶縁性の被覆がなされている領域部分である。図1に示したように、電極針1における先端付近に電極部11が配置されていると共に、この電極部11の基端側に被覆部12が配置されるようになっている。
(液体供給装置2)
液体供給装置2は、上記した電極針1に対して冷却用の液体Lを供給する装置であり、例えば図1に示したように、液体供給部21を有している。なお、この冷却用の液体Lとしては、例えば、滅菌水や、滅菌した生理食塩水などが挙げられる。
液体供給装置2は、上記した電極針1に対して冷却用の液体Lを供給する装置であり、例えば図1に示したように、液体供給部21を有している。なお、この冷却用の液体Lとしては、例えば、滅菌水や、滅菌した生理食塩水などが挙げられる。
液体供給部21は、後述する制御信号CTL2による制御に従って、上記した液体Lを電極針1に対して随時供給するものである。具体的には、例えば図1に示したように、液体供給部21は、液体供給装置2の内部と電極針1の内部との間(所定の流路内)を液体Lが循環するようにして、液体Lの供給動作を行う。また、詳細は後述するが、上記した制御信号CTL2による制御に従って、このような液体Lの供給動作が実行されたり、停止されたりするようになっている。なお、このような液体供給部21は、例えば、液体ポンプ等を含んで構成されている。
(電源装置3)
電源装置3は、電極針1と対極板4との間にアブレーションを行うための電力Pout(例えば高周波(RF;Radio Frequency)の電力)を供給すると共に、上記した液体供給装置2における液体Lの供給動作を制御する装置である。この電源装置3は、図1に示したように、入力部31、電源部32、制御部33および表示部34を有している。
電源装置3は、電極針1と対極板4との間にアブレーションを行うための電力Pout(例えば高周波(RF;Radio Frequency)の電力)を供給すると共に、上記した液体供給装置2における液体Lの供給動作を制御する装置である。この電源装置3は、図1に示したように、入力部31、電源部32、制御部33および表示部34を有している。
入力部31は、各種の設定値や、後述する所定の動作を指示するための指示信号(操作信号Sm)を入力する部分である。このような操作信号Smは、電源装置3の操作者(例えば技師等)による操作に応じて、入力部31から入力されるようになっている。ただし、これらの各種の設定値が、操作者による操作に応じて入力されるのではなく、例えば、製品の出荷時等に予め電源装置3内で設定されているようにしてもよい。また、入力部31により入力された設定値は、後述する制御部33へ供給されるようになっている。なお、このような入力部31は、例えば所定のダイヤルやボタン、タッチパネル等を用いて構成されている。
電源部32は、後述する制御信号CTL1に従って、上記した電力Poutを電極針1と対極板4との間に供給する部分である。このような電源部32は、所定の電源回路(例えばスイッチングレギュレータ等)を用いて構成されている。なお、電力Poutが高周波電力からなる場合、その周波数は、例えば450kHz~550kHz程度(例えば500kHz)である。
制御部33は、電源装置3全体を制御すると共に所定の演算処理を行う部分であり、例えばマイクロコンピュータ等を用いて構成されている。具体的には、制御部33は、まず、制御信号CTL1を用いて、電源部32における電力Poutの供給動作を制御する機能(電力供給制御機能)を有している。また、制御部33は、制御信号CTL2を用いて、液体供給装置2(液体供給部21)における液体Lの供給動作を制御する機能(液体供給制御機能)を有している。
このような制御部33にはまた、例えば図1に示したように、電極針1(電極部11の内部に配置された熱電対等の温度センサ)において測定された温度情報Itが、随時供給されるようになっている。また、例えば図1に示したように、制御部33には、上記した電源部32からインピーダンス値Z(後述)の測定値が随時供給されるようになっている。
なお、上記した電力供給制御機能および液体供給制御機能を含め、制御部33における制御動作等の詳細については、後述する(図4~図6)。
表示部34は、各種の情報を表示して外部へと出力する部分(モニター)である。表示対象の情報としては、例えば、入力部31から入力される前述の各種の設定値や、制御部33から供給される各種パラメータ(例えば後述するブレイク回数Nbのカウント値など)、電極針1から供給される温度情報Itなどが挙げられる。ただし、表示対象の情報としてはこれらの情報には限られず、他の情報を代わりに、あるいは他の情報を加えて表示するようにしてもよい。このような表示部34は、各種の方式によるディスプレイ(例えば、液晶ディスプレイやCRT(Cathode Ray Tube)ディスプレイ、有機EL(Electro Luminescence)ディスプレイなど)を用いて構成されている。
(対極板4)
対極板4は、例えば図1に示したように、アブレーションの際に患者9の体表に装着された状態で用いられるものである。詳細は後述するが、アブレーションの際に、前述した電極針1(電極部11)とこの対極板4との間で、高周波通電がなされる(電力Poutが供給される)ようになっている。また、詳細は後述するが、このようなアブレーションの際に、図1に示したように、電極針1(電極部11)と対極板4との間のインピーダンス値Zが随時測定され、測定されたインピーダンス値Zが、電源装置3内において電源部32から制御部33へと供給されるようになっている。
対極板4は、例えば図1に示したように、アブレーションの際に患者9の体表に装着された状態で用いられるものである。詳細は後述するが、アブレーションの際に、前述した電極針1(電極部11)とこの対極板4との間で、高周波通電がなされる(電力Poutが供給される)ようになっている。また、詳細は後述するが、このようなアブレーションの際に、図1に示したように、電極針1(電極部11)と対極板4との間のインピーダンス値Zが随時測定され、測定されたインピーダンス値Zが、電源装置3内において電源部32から制御部33へと供給されるようになっている。
[動作および作用・効果]
(A.基本動作)
このアブレーションシステム5では、例えば癌等の腫瘍を有する患部90を治療する際に、そのような患部90に対して所定のアブレーションが行われる(図1参照)。このようなアブレーションでは、まず、例えば図1中の矢印P1で示したように、患者9の体内の患部90に対し、電極針1が先端側(電極部11側)から経皮的に穿刺される。そして、この電極針1と対極板4との間に、電源装置3(電源部32)から電力Pout(例えば高周波電力)が供給されることで、患部90に対して、ジュール発熱によるアブレーションが行われる。
(A.基本動作)
このアブレーションシステム5では、例えば癌等の腫瘍を有する患部90を治療する際に、そのような患部90に対して所定のアブレーションが行われる(図1参照)。このようなアブレーションでは、まず、例えば図1中の矢印P1で示したように、患者9の体内の患部90に対し、電極針1が先端側(電極部11側)から経皮的に穿刺される。そして、この電極針1と対極板4との間に、電源装置3(電源部32)から電力Pout(例えば高周波電力)が供給されることで、患部90に対して、ジュール発熱によるアブレーションが行われる。
また、このようなアブレーションの際には、液体供給装置2の内部と電極針1の内部との間(所定の流路内)を冷却用の液体Lが循環するように、液体供給装置2(液体供給部21)から電極針1に対して液体Lが供給される(図1参照)。これにより、アブレーションの際に、電極針1に対する冷却動作(クーリング)が行われる。なお、アブレーションの終了後には、このような冷却動作も停止された後、電極針1において測定された温度情報Itを基に、患部90の組織温度が十分に上昇しているのかなど、患部の焼灼具合が確認される。
図2は、このようなアブレーションによる患部90での焼灼具合の一例を、模式的に表したものである。この図2に示したように、患部90に穿刺された電極針1を用いて上記したアブレーションがなされると、例えば、当初のラグビボール状(楕円球状)の熱凝固領域Ah1が、徐々に拡がっていくことで、ほぼ球状の熱凝固領域Ah2が得られる(図2中の破線の矢印を参照)。これにより、患部90全体への等方的なアブレーションが行われる結果、患部90への効果的な治療がなされることになる。
(B.ブレイク状態およびブレイク回数について)
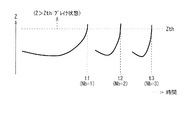
ここで、図1,図2に加えて図3を参照して、上記したアブレーションの詳細について説明する。図3は、アブレーションの際のブレイク状態およびブレイク回数の一例を、タイミング図にて模式的に表したものである。具体的には、この図3では、電極針1(電極部11)と対極板4との間のインピーダンス値Zの測定波形例を、時間軸に沿って示している。なお、図3中に示したインピーダンス値Zの閾値Zthは、本発明における「第1の閾値」の一具体例に対応している。
ここで、図1,図2に加えて図3を参照して、上記したアブレーションの詳細について説明する。図3は、アブレーションの際のブレイク状態およびブレイク回数の一例を、タイミング図にて模式的に表したものである。具体的には、この図3では、電極針1(電極部11)と対極板4との間のインピーダンス値Zの測定波形例を、時間軸に沿って示している。なお、図3中に示したインピーダンス値Zの閾値Zthは、本発明における「第1の閾値」の一具体例に対応している。
図3に示した例のように、一般に、電極針を使用したアブレーションの際には、患部90における組織内の水分の蒸発により、インピーダンス値Zが急激に上昇していく。このようなインピーダンス値Zの急激な上昇(インピーダンスライズ)は、患部90における組織の熱凝固の指標となることから、アブレーションの際の停止タイミングの目安となる。具体的には、インピーダンス値Zが所定の閾値Zthを越えた状態(Z>Zth)は、「ブレイク状態」と呼ばれる(図3参照)。また、このようなブレイク状態となると、アブレーション(電力Poutの供給)が一時的に停止された後、アブレーションが再開される。なお、アブレーションが一時的に停止されると、周りの組織から患部90における組織内へ水分が供給される結果、インピーダンス値Zが再度低下することになる(図3参照)。そして、このような断続的なアブレーションが複数回繰り返されることで、患部90への治療がなされる。なお、上記したアブレーションの一時的な停止時間(アブレーションの再開までの待機時間)としては、例えば、予め設定された所定時間(例えば10秒~15秒程度)、または、インピーダンス値Zが概ね上昇前の値に戻るまでの時間が挙げられる。
具体的には、この図3に示した例では、時間の経過とともに、タイミングt1,t2,t3の3回、ブレイク状態となってアブレーションが一時的に停止されている。このように、ブレイク状態が複数回繰り返される場合におけるブレイク状態の回数を、以下、「ブレイク回数Nb」と称する。つまり、この図3の例では、タイミングt1において1回目のブレイク状態となり(Nb=1)、タイミングt2において2回目のブレイク状態となり(Nb=2)、タイミングt3において3回目のブレイク状態となっている(Nb=3)。
ちなみに、電極針1を使用したアブレーションによる患部90への治療では、このブレイク回数Nbは、一般に、2~3回(Nb=2またはNb=3)程度が目安とされている。つまり、前述の図2中に示した熱凝固領域Ah1,Ah2はそれぞれ、一例として、Nb=1,Nb=3の場合に相当している。
(C.比較例)
ところで、このようなアブレーションシステムによるアブレーションの際に、従来の一般的な手法では、以下のようにしてアブレーションを終了させるようになっている。具体的には、まず、ブレイク回数Nbを、電源装置3の操作者が目視等で確認してから(例えば上記したように、2~3回程度)、アブレーションを手動で終了させる手法(比較例1)が挙げられる。また、ブレイク回数Nbを確認せずに、所定の待機時間(固定値)が経過してから電力Poutの供給を自動的に停止することで、アブレーションを自動終了させる手法(比較例2)が挙げられる。
ところで、このようなアブレーションシステムによるアブレーションの際に、従来の一般的な手法では、以下のようにしてアブレーションを終了させるようになっている。具体的には、まず、ブレイク回数Nbを、電源装置3の操作者が目視等で確認してから(例えば上記したように、2~3回程度)、アブレーションを手動で終了させる手法(比較例1)が挙げられる。また、ブレイク回数Nbを確認せずに、所定の待機時間(固定値)が経過してから電力Poutの供給を自動的に停止することで、アブレーションを自動終了させる手法(比較例2)が挙げられる。
ところが、上記比較例1の手法では、操作者による目視等での確認であることから、例えばブレイク状態の見落とし等により、ブレイク回数Nbのカウントが不正確となってしまうおそれもあり、アブレーション時間が余計にかかってしまうリスクもある。なお、2回目以降のブレイク状態への移行は、一般的に短時間でなされることから(図3参照)、このようなリスクは非常に高いと言える。一方、上記比較例2の手法では、常に一定の待機時間の経過を待つことから、アブレーション時間内にブレイク回数Nbが必要以上に多くなってしまう(例えば4回以上)おそれがある。これらのことから、上記比較例1,2などでは、アブレーションによる治療の際に、患部90に対して必要以上に多くのブレイク状態が付与されることになる結果、患者9が感じる疼痛が大きくなり、患者9への負担も大きくなってしまうおそれがある。
ここで、この疼痛とは、治療の際に患者9が感じる痛みのことを意味しており、例えば、脊髄神経を介した関連痛として、右肩などが痛むことが多いと言われている。なお、ブレイク状態ではインピーダンス値Zが急上昇するため、電力Poutを例えば定電力出力する場合には、出力電圧も急上昇する。また、ブレイク状態への移行前には、患部90での温度も上昇する傾向にある。したがって、この疼痛には、電気的および熱的の双方の発生要因があると言われている。
また、患部90における腫瘍の種類によっては、このような疼痛が大きくなると、例えば以下のようなデメリットがある。具体的には、例えば肝臓癌では一般に、他の臓器での癌と比べて再発率が高いため、繰り返しの治療が必要となるが、患者9が感じる痛みの記憶が、次回の治療を受ける妨げとなるおそれがある。一方で、治療の際の麻酔を強くすれば、そのような疼痛を軽減できるものの、麻酔を強くすることは、合併症予知の妨げとなる。これらのことから、最小限の量の麻酔を使用しつつ、疼痛は最小限に抑えることが理想であるため、アブレーションによる治療の際のブレイク回数Nbについても、上記比較例1,2などのように、必要以上に多くなってしまうのは望ましくないと言える。
このようにして、上記比較例1,2などでは、効果的なアブレーションの実施が困難となる結果、アブレーションシステムを使用する際の利便性が、損なわれてしまうおそれがある。
(D.本実施の形態のアブレーション)
そこで、例えば図4に示したように、本実施の形態のアブレーションシステム5では、以下詳述する手法でアブレーションを行うことで、上記比較例1,2などにおける課題を解決するようにしている。この図4は、本実施の形態のアブレーションシステム5におけるアブレーションの処理例を、流れ図で表したものである。
そこで、例えば図4に示したように、本実施の形態のアブレーションシステム5では、以下詳述する手法でアブレーションを行うことで、上記比較例1,2などにおける課題を解決するようにしている。この図4は、本実施の形態のアブレーションシステム5におけるアブレーションの処理例を、流れ図で表したものである。
この本実施の形態のアブレーションでは、まず、前述した閾値Zth(インピーダンス値Zの閾値)と、後述する閾値Nth(ブレイク回数Nbの閾値)との設定を行う(図4のステップS10)。具体的には、これらの閾値Zthおよび閾値Nthの設定値がそれぞれ、電源装置3の操作者による操作に応じて入力部31から入力され、制御部33へと供給される。なお、この閾値Nthは、本発明における「第2の閾値」の一具体例に対応している。
ここで、閾値Nthとしては、ブレイク回数Nbに関して前述したように、例えば3回(Nth=3)が挙げられる。また、閾値Zthとしては、絶対値で規定する手法(例えば、Zth=120[Ω]程度)と、相対値で規定する手法(何Ωもしくは何%上昇したかで規定する手法)と、に大別される。更に、この相対値で規定する手法としても、アブレーションの開始時におけるインピーダンス値Zを基準として規定する手法と、アブレーション開始後におけるインピーダンス値Zの最小値を基準として規定する手法と、が挙げられる。なお、前述したように、このような閾値Zthや閾値Nthの設定値が、操作者による操作に応じて入力されるのではなく、例えば、製品の出荷時等に予め電源装置3内で設定されているようにしてもよい。
次に、電極針1と対極板4との間に電源装置3(電源部32)から電力Poutを供給することで、患部90に対するアブレーションを開始する(ステップS11)。具体的には、このアブレーションの開始は、電源装置3の操作者による操作に応じて、操作信号Smが入力部31から入力されて制御部33へと供給されることで、実行される。すなわち、この例では、アブレーションが手動で開始されるようになっている。
続いて、このようなアブレーションが開始されると、電源部32はまず、電極針1と対極板4との間のインピーダンス値Zを測定する(ステップS12)。言い換えると、制御部33は、そのようなインピーダンス値Zの測定情報を取得する。そして、このようにして測定されたインピーダンス値Zが、電源部32から制御部33へと供給されると、次に制御部33は、以下の判定を行う。すなわち、制御部33は、このインピーダンス値Zが、ステップS10において設定された閾値Zthよりも大きいのか否か(Z>Zthを満たすのか否か)を判定する(ステップS13)。ここで、インピーダンス値Zが閾値Zth以下である(Z>Zthを満たさない)と判定された場合には(ステップS13:N)、上記したステップS12へと戻り、再びインピーダンス値Zの測定が行われる。
一方、インピーダンス値Zが閾値Zthよりも大きい(Z>Zthを満たす)と判定された場合(ステップS13:Y)、前述したブレイク状態になったことを意味する。そこで、この場合、次に制御部33は、このブレイク状態の回数(ブレイク回数Nb)を自動的にカウントする(ステップS14)。なお、このブレイク回数Nbのカウント値は、例えば制御部33内の各種記憶媒体に、随時記憶されることになる。
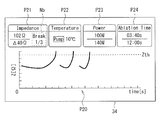
このようなブレイク回数Nbのカウント値等は、例えば図5に模式的に示したように、電源装置3における表示部34に、随時表示されるようになっている。具体的には、この表示部34では、まず、前述した図3にも模式的に示したように、インピーダンス値Zの測定波形が、時間軸に沿って表示されている(図5中の符号P20参照)。また、この表示部34の例では更に、インピーダンス値Zの現在値(Impedance:符号P21参照)と、前述した温度情報It(Temperature:符号P22参照)と、電力Poutの出力値(Power:符号P23参照)と、アブレーション時間の情報(Ablation Time:符号P24参照)とが、それぞれ表示されている。そして、この表示部34の例では、図5中に示したように、インピーダンス値Zの現在値(符号P21参照)とともに、ブレイク回数Nbのカウント値が併せて表示されるようになっている。
続いて、制御部33は、前述した制御信号CTL1を用いて、電源部32からの電力Poutの供給を一時的に低下または停止させることで、アブレーションを一時的に停止させる(ステップS15)。これにより前述したように、インピーダンス値Zが再度低下し、ブレイク状態から抜けることになる。
次いで、制御部33は、上記したステップS14においてカウントされたブレイク回数Nbが、ステップS10において設定された閾値Nth以上であるのか否か(Nb≧Nthを満たすのか否か)を判定する(ステップS16)。ブレイク回数Nbが閾値Nth未満である(Nb≧Nthを満たさない)と判定された場合には(ステップS16:N)、次に、電力Poutの供給(アブレーション)が、自動的または手動により再開される(ステップS17)。
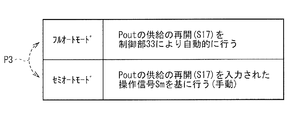
ここで、図6は、このような電力Poutの供給再開(ステップS17)の際の、動作モードの一例を表したものである。この図6に示したように、このときの動作モードとしては、例えば、「フルオートモード」と「セミオートモード」との2種類の動作モードが挙げられる。なお、このフルオートモードは、本発明における「第1の動作モード」の一具体例に対応し、セミオートモードは、本発明における「第2の動作モード」の一具体例に対応している。
まず、フルオードモードでは、ブレイク回数Nbが閾値Nthに到達していない場合(ステップS16:N)、制御部33により、電力Poutの供給(アブレーション)を自動的に再開させる(ステップS17)。具体的には、制御部33は、前述した制御信号CTL1を用いて、電源部32からの電力Poutの供給を、自動的に再開させる。つまり、このフルオートモードでは、電力Poutの供給が、自動的に再開されるようになっている。
一方、セミオードモードでは、ブレイク回数Nbが閾値Nthに到達していない場合(ステップS16:N)、電源装置3の操作者による操作に応じて入力される操作信号Smに基づいて、制御部33が電力Poutの供給(アブレーション)を再開させる(ステップS17)。つまり、このセミオートモードでは、電力Poutの供給が、手動により再開されるようになっている。
また、本実施の形態では、例えば電源装置3において、このような2種類の動作モード(「フルオートモード」および「セミオートモード」)が、切り替え可能となっていてもよい(図6中に示した破線の矢印P3参照)。すなわち、例えば、電源装置3の操作者による操作に応じて入力される操作信号Smに基づいて、これらの2種類の動作モードが、随時切り替えられるようになっていてもよい。
なお、このような電力Poutの供給(アブレーション)が再開された後は、前述したステップS12へと戻り、再びインピーダンス値Zの測定が行われることになる。ちなみに、前述したステップS15において、電力Poutの供給を一時的に「低下」させる場合には、前述したブレイク状態においても、インピーダンス値Zが測定し続けられるようになっている。一方、ステップS15において、電力Poutの供給を一時的に「停止」させる場合には、ブレイク状態になると、インピーダンス値Zの測定は行われないようになっている。
ここで、上記したステップS16において、ブレイク回数Nbが閾値Nth以上である(Nb≧Nthを満たす)と判定された場合には(ステップS16:Y)、次に制御部33は、以下の制御を行う。すなわち、制御部33は、ブレイク回数Nbが閾値Nthに到達した場合(ステップS16:Y)、電源部32からの電力Poutの供給を自動的に停止(完全停止)させることにより、アブレーションを自動的に終了させる(ステップS18)。具体的には、制御部33は、前述した制御信号CTL1を用いて、電力Poutの供給を自動的に停止させる。これにより、患部90に対するアブレーションが、制御部33によって自動的に終了させられることになる。
続いて、制御部33は、このようにしてアブレーションを自動的に終了させた(ステップS18)後に、液体供給装置2からの冷却用の液体Lの供給も、自動的に停止させる(ステップS19)。具体的には、制御部33は、前述した制御信号CTL2を用いて、液体供給部21からの液体Lの供給を、自動的に停止させる。これにより、液体供給装置2の内部と電極針1の内部との間での液体Lの循環が停止され(図1参照)、電極針1に対する冷却動作(クーリング)が停止される。以上で、図4に示した一連の処理(本実施の形態のアブレーションの処理例)が終了となる。
(E.作用・効果)
このようにして、本実施の形態のアブレーションシステム5では、制御部33はアブレーションの際に、以下のような制御を行う。すなわち、まず、制御部33は、電極針1と対極板4との間のインピーダンス値Zを測定する(図4のステップS12)と共に、このインピーダンス値Zが閾値Zthを越えたブレイク状態の回数(ブレイク回数Nb)をカウントする(ステップS14)。そして、制御部33は、このブレイク回数Nbが閾値Nthに到達した場合には、電力Poutの供給を自動的に停止させることにより、アブレーションを自動的に終了させる(ステップS18)。
このようにして、本実施の形態のアブレーションシステム5では、制御部33はアブレーションの際に、以下のような制御を行う。すなわち、まず、制御部33は、電極針1と対極板4との間のインピーダンス値Zを測定する(図4のステップS12)と共に、このインピーダンス値Zが閾値Zthを越えたブレイク状態の回数(ブレイク回数Nb)をカウントする(ステップS14)。そして、制御部33は、このブレイク回数Nbが閾値Nthに到達した場合には、電力Poutの供給を自動的に停止させることにより、アブレーションを自動的に終了させる(ステップS18)。
これにより本実施の形態では、以下のようになる。すなわち、例えば前述したような、ブレイク回数Nbを目視等で確認してからアブレーションを手動で終了させる場合(比較例1)や、ブレイク回数Nbを確認せずに所定の待機時間が経過してからアブレーションを自動終了させる場合(比較例2)などと比べ、効果的なアブレーションが容易に実施できるようになる。よって、本実施の形態ではこれらの比較例1,2などと比べ、アブレーションシステム5を使用する際の利便性を向上させることが可能となる。
また、本実施の形態では、電源装置3において、ブレイク回数Nbのカウント値を表示する表示部34を設けるようにしたので(図5参照)、ブレイク回数Nbのカウント値を、電源装置3の操作者等が随時把握できるようになる。よって、利便性を更に向上させることが可能となる。
更に、本実施の形態では、電力Poutの供給(アブレーション)を再開する際(図4のステップS17)に、制御部33により自動的に再開させるようにした場合(図6に示した「フルオートモード」を実行する場合)には、以下のようになる。すなわち、この「フルオードモード」では、電力Poutの供給の再開も自動的に行われることから、アブレーションが開始されてから終了までの一連の処理(図4中のステップS12~S19の各処理)が自動的になされるようになる。よって、利便性の更なる向上を図ることが可能となる。
加えて、本実施の形態では、上記した電力Poutの供給を再開する際に、電源装置3の操作者による操作に応じて入力される操作信号Smに基づいて再開されるようにした場合(図6に示した「セミオートモード」を実行する場合)には、以下のようになる。すなわち、電力Poutの供給の再開自体は手動で行われることから、例えば、電力Poutの供給の再開タイミングを、随時調整することが可能となる。よって、この場合も、利便性の更なる向上を図ることが可能となる。
また、本実施の形態では、電源装置3において、これら2種類の動作モード(「フルオートモード」および「セミオートモード」)が切り替え可能になっているので(図6中の矢印P3参照)、以下のようになる。すなわち、電力Poutの供給(アブレーション)を再開する際(図4のステップS17)に、例えば用途や状況等に応じて、これら2種類のモードを随時切り替えることができる。よって、利便性の更なる向上を図ることが可能となる。
更に、本実施の形態では、制御部33は、ブレイク回数Nbが閾値Nthに到達した場合、アブレーションを自動的に終了させた(図4のステップS18)後に、液体Lの供給も自動的に停止させるようにしたので(ステップS19)、以下のようになる。すなわち、例えば、アブレーションの終了後に液体Lの供給を手動で停止させる場合(比較例3)と比べ、適切なタイミングでの液体Lの供給停止が実現されるようになる。その結果、アブレーション後の患部90(組織)が液体Lによって必要以上に冷却されてしまうおそれが回避され、患部90の焼灼具合を、より正確に確認できるようになる。よって、本実施の形態では上記比較例3と比べ、利便性の更なる向上を図ることが可能となる。
<2.変形例>
以上、実施の形態を挙げて本発明を説明したが、本発明はこの実施の形態に限定されず、種々の変形が可能である。
以上、実施の形態を挙げて本発明を説明したが、本発明はこの実施の形態に限定されず、種々の変形が可能である。
例えば、上記実施の形態において説明した各部材の材料等は限定されるものではなく、他の材料としてもよい。また、上記実施の形態では、電極針1の構成を具体的に挙げて説明したが、必ずしも全ての部材を備える必要はなく、また、他の部材を更に備えていてもよい。更に、上記実施の形態で説明した各種パラメータの値や範囲、大小関係等についても、上記実施の形態で説明したものには限られず、他の値や範囲、大小関係等であってもよい。
また、上記実施の形態では、液体供給装置2および電源装置3のブロック構成を具体的に挙げて説明したが、上記実施の形態で説明した各ブロックを必ずしも全て備える必要はなく、また、他のブロックを更に備えていてもよい。また、アブレーションシステム5全体としても、上記実施の形態で説明した各装置に加えて、他の装置を更に備えていてもよい。
更に、上記実施の形態では、電力供給制御機能および液体供給制御機能を含む制御部33における制御動作(アブレーションの手法)について具体的に説明した。しかしながら、これらの電力供給制御機能および液体供給制御機能等における制御手法(アブレーションの手法)については、上記実施の形態で挙げた手法には限られない。具体的には、例えば、前述した閾値Nth(ブレイク回数Nbの閾値)については、上記実施の形態では主に3回(Nth=3)を例に挙げて説明したが、この例には限られず、1回(Nth=1),2回(Nth=2),4回以上(Nth≧4)の任意の回数などであってもよい。
また、上記実施の形態で説明した一連の処理は、ハードウェア(回路)で行われるようにしてもよいし、ソフトウェア(プログラム)で行われるようにしてもよい。ソフトウェアで行われるようにした場合、そのソフトウェアは、各機能をコンピュータにより実行させるためのプログラム群で構成される。各プログラムは、例えば、上記コンピュータに予め組み込まれて用いられてもよいし、ネットワークや記録媒体から上記コンピュータにインストールして用いられてもよい。
更に、これまでに説明した各種の例を、任意の組み合わせで適用させるようにしてもよい。
Claims (6)
- 体内の患部に対して経皮的に穿刺される電極針と、
前記電極針と対極板との間にアブレーションを行うための電力を供給する電源部と、前記電源部における前記電力の供給動作を制御する制御部と、を有する電源装置と
を備え、
前記制御部は、
前記アブレーションの際に、前記電極針と前記対極板との間のインピーダンス値を測定すると共に、前記インピーダンス値が第1閾値を越えたブレイク状態の回数であるブレイク回数をカウントし、
前記ブレイク回数が第2閾値に到達した場合には、前記電力の供給を自動的に停止させることにより、前記アブレーションを自動的に終了させる
アブレーションシステム。 - 前記電源装置は、前記ブレイク回数のカウント値を表示する表示部を更に有する
請求項1に記載のアブレーションシステム。 - 前記制御部は、
前記ブレイク状態となった場合には、前記ブレイク回数をカウントすると共に、前記電力の供給を一時的に低下または停止させ、
前記ブレイク回数が前記第2閾値に到達していない場合には、前記電力の供給を自動的に再開させる
請求項1または請求項2に記載のアブレーションシステム。 - 前記制御部は、
前記ブレイク状態となった場合には、前記ブレイク回数をカウントすると共に、前記電力の供給を一時的に低下または停止させ、
前記ブレイク回数が前記第2閾値に到達していない場合には、操作者による操作に応じて入力される操作信号に基づいて、前記電力の供給を再開させる
請求項1または請求項2に記載のアブレーションシステム。 - 前記電源装置では、第1の動作モードと第2の動作モードとが切り替え可能になっており、
前記第1の動作モードでは、前記制御部は、
前記ブレイク状態となった場合には、前記ブレイク回数をカウントすると共に、前記電力の供給を一時的に低下または停止させ、
前記ブレイク回数が前記第2閾値に到達していない場合には、前記電力の供給を自動的に再開させ、
前記第2の動作モードでは、前記制御部は、
前記ブレイク状態となった場合には、前記ブレイク回数をカウントすると共に、前記電力の供給を一時的に低下または停止させ、
前記ブレイク回数が前記第2閾値に到達していない場合には、操作者による操作に応じて入力される操作信号に基づいて、前記電力の供給を再開させる
請求項1または請求項2に記載のアブレーションシステム。 - 前記電極針に対して冷却用の液体を供給する液体供給装置を更に備え、
前記制御部は、前記ブレイク回数が前記第2閾値に到達した場合、前記アブレーションを自動的に終了させた後に、前記液体の供給も自動的に停止させる
請求項1ないし請求項5のいずれか1項に記載のアブレーションシステム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020207003535A KR102336199B1 (ko) | 2017-08-29 | 2018-02-19 | 어블레이션 시스템 |
| EP18851209.9A EP3656324A4 (en) | 2017-08-29 | 2018-02-19 | ABLATION SYSTEM |
| CN201880048176.0A CN110944590B (zh) | 2017-08-29 | 2018-02-19 | 消融系统 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017164461A JP6853145B2 (ja) | 2017-08-29 | 2017-08-29 | アブレーションシステム |
| JP2017-164461 | 2017-08-29 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019043991A1 true WO2019043991A1 (ja) | 2019-03-07 |
Family
ID=65525331
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/005775 WO2019043991A1 (ja) | 2017-08-29 | 2018-02-19 | アブレーションシステム |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP3656324A4 (ja) |
| JP (1) | JP6853145B2 (ja) |
| KR (1) | KR102336199B1 (ja) |
| CN (1) | CN110944590B (ja) |
| TW (1) | TWI670041B (ja) |
| WO (1) | WO2019043991A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111529052B (zh) * | 2020-04-16 | 2021-05-07 | 上海睿刀医疗科技有限公司 | 一种预测电脉冲消融区域的系统 |
| JP7454682B2 (ja) * | 2020-08-20 | 2024-03-22 | 日本ライフライン株式会社 | アブレーションシステム |
| WO2022091224A1 (ja) * | 2020-10-27 | 2022-05-05 | 日本ライフライン株式会社 | アブレーションシステム |
| WO2022091369A1 (ja) * | 2020-10-30 | 2022-05-05 | 日本ライフライン株式会社 | アブレーションシステム |
| SE2150579A1 (en) * | 2021-05-06 | 2022-11-07 | Curative Cancer Treat By Heat Cctbh Ab | Tumor denaturization control in curative cancer treatment |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002065690A (ja) * | 2000-08-23 | 2002-03-05 | Olympus Optical Co Ltd | 電気手術装置 |
| JP2004008581A (ja) * | 2002-06-07 | 2004-01-15 | Aloka Co Ltd | 電気手術装置 |
| JP2008514271A (ja) * | 2004-09-27 | 2008-05-08 | ビブラテック・アクチボラゲット | 腫瘍の治療のための機構 |
| JP2008114042A (ja) * | 2006-10-31 | 2008-05-22 | Olympus Medical Systems Corp | 高周波手術装置及び高周波手術方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015008830A (ja) * | 2013-06-27 | 2015-01-19 | 日本ライフライン株式会社 | カテーテルシステム |
| JP5641591B1 (ja) * | 2013-06-27 | 2014-12-17 | 日本ライフライン株式会社 | カテーテルシステム |
| US9717552B2 (en) * | 2014-05-06 | 2017-08-01 | Cosman Intruments, Llc | Electrosurgical generator |
| EP3261549B1 (en) * | 2015-02-27 | 2021-08-04 | Koninklijke Philips N.V. | System for adaptive ablation and therapy based on elastography monitoring |
| US10285751B2 (en) * | 2015-10-16 | 2019-05-14 | Biosense Webster (Israel) Ltd. | System and method for controlling catheter power based on renal ablation response |
| CN105496549A (zh) * | 2015-10-29 | 2016-04-20 | 绵阳立德电子股份有限公司 | 一种射频发生器及利用该射频器产生射频能量的方法 |
-
2017
- 2017-08-29 JP JP2017164461A patent/JP6853145B2/ja active Active
-
2018
- 2018-02-19 EP EP18851209.9A patent/EP3656324A4/en active Pending
- 2018-02-19 CN CN201880048176.0A patent/CN110944590B/zh active Active
- 2018-02-19 KR KR1020207003535A patent/KR102336199B1/ko active IP Right Grant
- 2018-02-19 WO PCT/JP2018/005775 patent/WO2019043991A1/ja unknown
- 2018-04-26 TW TW107114159A patent/TWI670041B/zh not_active IP Right Cessation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002065690A (ja) * | 2000-08-23 | 2002-03-05 | Olympus Optical Co Ltd | 電気手術装置 |
| JP2004008581A (ja) * | 2002-06-07 | 2004-01-15 | Aloka Co Ltd | 電気手術装置 |
| JP2008514271A (ja) * | 2004-09-27 | 2008-05-08 | ビブラテック・アクチボラゲット | 腫瘍の治療のための機構 |
| JP2008114042A (ja) * | 2006-10-31 | 2008-05-22 | Olympus Medical Systems Corp | 高周波手術装置及び高周波手術方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3656324A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110944590B (zh) | 2023-01-31 |
| CN110944590A (zh) | 2020-03-31 |
| TWI670041B (zh) | 2019-09-01 |
| JP6853145B2 (ja) | 2021-03-31 |
| JP2019041782A (ja) | 2019-03-22 |
| TW201912124A (zh) | 2019-04-01 |
| EP3656324A4 (en) | 2021-04-07 |
| EP3656324A1 (en) | 2020-05-27 |
| KR20200024924A (ko) | 2020-03-09 |
| KR102336199B1 (ko) | 2021-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019043991A1 (ja) | アブレーションシステム | |
| WO2021129271A1 (zh) | 射频消融功率的输出控制方法和装置、以及射频消融系统 | |
| JP6914842B2 (ja) | エラストグラフィ監視に基づく適応的なアブレーション及び治療のシステム及び方法 | |
| US9060774B2 (en) | High-frequency surgical device | |
| EP3451964B1 (en) | Systems facilitating application of an appropriate thermal dosage in microwave ablation procedures | |
| KR101652659B1 (ko) | 카테터 시스템 | |
| WO2022038728A1 (ja) | アブレーションシステム | |
| WO2022091369A1 (ja) | アブレーションシステム | |
| KR20150113075A (ko) | 카테터 시스템 | |
| WO2022091224A1 (ja) | アブレーションシステム | |
| TWI693918B (zh) | 消融裝置 | |
| JP2015119895A (ja) | 熱伝導率測定システム | |
| JP7352011B2 (ja) | アブレーション制御システム | |
| TWI693920B (zh) | 消融裝置 | |
| WO2019187238A1 (ja) | アブレーションデバイス | |
| US20210339033A1 (en) | Treatment apparatus | |
| US20240216707A1 (en) | Radio frequency array control device, therapy instrument and treatment method | |
| WO2020174651A1 (ja) | カテーテルシステム | |
| JP2023143342A (ja) | 電源装置、電気医療デバイスシステムおよび給電方法 | |
| WO2020174650A1 (ja) | カテーテルシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18851209 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 20207003535 Country of ref document: KR Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2018851209 Country of ref document: EP Effective date: 20200219 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |