WO2018155181A1 - Terminal d'apprentissage et système d'apprentissage - Google Patents
Terminal d'apprentissage et système d'apprentissage Download PDFInfo
- Publication number
- WO2018155181A1 WO2018155181A1 PCT/JP2018/004143 JP2018004143W WO2018155181A1 WO 2018155181 A1 WO2018155181 A1 WO 2018155181A1 JP 2018004143 W JP2018004143 W JP 2018004143W WO 2018155181 A1 WO2018155181 A1 WO 2018155181A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- robot
- teaching operation
- teaching
- operation terminal
- switch
- Prior art date
Links
Images



Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/42—Recording and playback systems, i.e. in which the programme is recorded from a cycle of operations, e.g. the cycle of operations being manually controlled, after which this record is played back on the same machine
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Manipulator (AREA)
Abstract
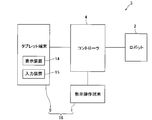
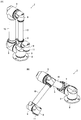
L'invention concerne un terminal d'apprentissage destiné à être utilisé dans une opération d'apprentissage pour robot, avec lequel un opérateur effectuant une opération d'apprentissage pour robot peut facilement effectuer l'opération à l'aide d'une main tenant le terminal d'apprentissage, et qui permet à l'opérateur de s'apercevoir rapidement de l'apparition d'une anomalie affectant le robot. Un terminal d'apprentissage (1) est pourvu d'une partie de préhension (27a) saisie par une main de l'opérateur, d'un élément d'actionnement (20) qui est actionné par le pouce de l'opérateur et qui actionne le robot, et d'un commutateur de validation (21). Une partie d'actionnement (20a) de l'élément d'actionnement (20) actionnée par l'opérateur est disposée davantage vers le côté de l'extrémité distale du terminal d'apprentissage (1) que la partie de préhension (27a) et du côté supérieur du terminal d'apprentissage (1), et une partie d'actionnement (21a) du commutateur de validation (21) actionnée par l'opérateur est disposée du côté opposé du terminal d'apprentissage et sur une ligne axiale L de l'élément d'actionnement (20). Un moteur vibrant (31) destiné à informer l'opérateur d'une anomalie affectant le robot est intégré dans le terminal d'apprentissage (1).
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-033016 | 2017-02-24 | ||
| JP2017033016A JP2018138317A (ja) | 2017-02-24 | 2017-02-24 | 教示操作端末 |
| JP2017-033015 | 2017-02-24 | ||
| JP2017033015A JP2018138316A (ja) | 2017-02-24 | 2017-02-24 | 教示操作端末および教示操作システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018155181A1 true WO2018155181A1 (fr) | 2018-08-30 |
Family
ID=63254302
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/004143 WO2018155181A1 (fr) | 2017-02-24 | 2018-02-07 | Terminal d'apprentissage et système d'apprentissage |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2018155181A1 (fr) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0146271B2 (fr) * | 1982-03-03 | 1989-10-06 | Shin Meiwa Ind Co Ltd | |
| WO2006103838A1 (fr) * | 2005-03-25 | 2006-10-05 | Kabushiki Kaisha Yaskawa Denki | Systeme de machine automatique et procede de communication sans fil |
| WO2007025928A1 (fr) * | 2005-08-29 | 2007-03-08 | Abb Research Ltd. | Dispositif de conduite portable pour robot industriel |
| US20100292814A1 (en) * | 2009-05-12 | 2010-11-18 | Foxnum Technology Co., Ltd. | Cnc machine control apparatus |
| JP2012110995A (ja) * | 2010-11-24 | 2012-06-14 | Kyokko Denki Kk | 指接触により動作教示可能となる動作教示装置 |
| JP2014050950A (ja) * | 2012-09-06 | 2014-03-20 | Fanuc Robotics America Inc | 触覚教示ペンダント |
-
2018
- 2018-02-07 WO PCT/JP2018/004143 patent/WO2018155181A1/fr active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0146271B2 (fr) * | 1982-03-03 | 1989-10-06 | Shin Meiwa Ind Co Ltd | |
| WO2006103838A1 (fr) * | 2005-03-25 | 2006-10-05 | Kabushiki Kaisha Yaskawa Denki | Systeme de machine automatique et procede de communication sans fil |
| WO2007025928A1 (fr) * | 2005-08-29 | 2007-03-08 | Abb Research Ltd. | Dispositif de conduite portable pour robot industriel |
| US20100292814A1 (en) * | 2009-05-12 | 2010-11-18 | Foxnum Technology Co., Ltd. | Cnc machine control apparatus |
| JP2012110995A (ja) * | 2010-11-24 | 2012-06-14 | Kyokko Denki Kk | 指接触により動作教示可能となる動作教示装置 |
| JP2014050950A (ja) * | 2012-09-06 | 2014-03-20 | Fanuc Robotics America Inc | 触覚教示ペンダント |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101758499B (zh) | 用于检测操纵器工作点的空间位置的手持设备及方法 | |
| RU2698292C2 (ru) | Переносное устройство управления защитой для промышленных машин, в частности роботов | |
| EP2228705B1 (fr) | Dispositif d'entrée à pédale avec trois degrés de liberté en rotation | |
| EP2489301B1 (fr) | Dispositif d'endoscope | |
| WO2012046605A1 (fr) | Endoscope | |
| CN109571460B (zh) | 操作单元和机器人 | |
| US20170028549A1 (en) | Robotic navigation system and method | |
| US20160031089A1 (en) | Teach pendant | |
| JP7277294B2 (ja) | 機械を操作する携帯端末に取り付けられる安全スイッチ装置および安全スイッチ装置を備える機械の操作装置 | |
| KR20160061266A (ko) | 산업용 로봇의 조작에 이용되는 교시 장치 | |
| US20200019205A1 (en) | User interface device | |
| JP2016221644A (ja) | 教示装置およびロボットシステム | |
| JP2012110995A (ja) | 指接触により動作教示可能となる動作教示装置 | |
| US11305414B2 (en) | Manipulating device | |
| WO2018155181A1 (fr) | Terminal d'apprentissage et système d'apprentissage | |
| JPH11262884A (ja) | ロボットのマニュアル操作装置 | |
| JP2005518288A (ja) | プログラミングユニットを備えた産業用ロボット装置 | |
| JP2018138316A (ja) | 教示操作端末および教示操作システム | |
| JP2018138317A (ja) | 教示操作端末 | |
| CN109841441B (zh) | 便携式操作装置 | |
| JP2001260062A (ja) | 産業用ロボットの教示装置 | |
| KR20200075535A (ko) | 사용자 인터페이스 장치, 수술 로봇 장치의 마스터 콘솔 및 그 조작방법 | |
| JP6930783B1 (ja) | 医療用ロボット | |
| JPH0985659A (ja) | 抱え込み型ロボット用教示装置 | |
| US20200238515A1 (en) | Horizontal articulated robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18758040 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18758040 Country of ref document: EP Kind code of ref document: A1 |