WO2018135284A1 - 粉塵検出装置 - Google Patents
粉塵検出装置 Download PDFInfo
- Publication number
- WO2018135284A1 WO2018135284A1 PCT/JP2017/047107 JP2017047107W WO2018135284A1 WO 2018135284 A1 WO2018135284 A1 WO 2018135284A1 JP 2017047107 W JP2017047107 W JP 2017047107W WO 2018135284 A1 WO2018135284 A1 WO 2018135284A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- wind speed
- value
- sensing location
- sensor output
- dust
- Prior art date
Links
- 239000000428 dust Substances 0.000 title claims abstract description 200
- 230000003287 optical effect Effects 0.000 claims abstract description 18
- 238000004378 air conditioning Methods 0.000 claims description 69
- 238000001514 detection method Methods 0.000 claims description 40
- 230000000875 corresponding effect Effects 0.000 claims description 15
- 230000002596 correlated effect Effects 0.000 claims description 4
- 230000001276 controlling effect Effects 0.000 claims 1
- 238000000034 method Methods 0.000 description 28
- 238000007664 blowing Methods 0.000 description 19
- 238000009423 ventilation Methods 0.000 description 18
- 238000010586 diagram Methods 0.000 description 7
- 238000011144 upstream manufacturing Methods 0.000 description 5
- 230000001143 conditioned effect Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 239000000470 constituent Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000001678 irradiating effect Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000004743 Polypropylene Substances 0.000 description 1
- 238000000149 argon plasma sintering Methods 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- -1 polypropylene Polymers 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume, or surface-area of porous materials
- G01N15/06—Investigating concentration of particle suspensions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60H—ARRANGEMENTS OF HEATING, COOLING, VENTILATING OR OTHER AIR-TREATING DEVICES SPECIALLY ADAPTED FOR PASSENGER OR GOODS SPACES OF VEHICLES
- B60H1/00—Heating, cooling or ventilating [HVAC] devices
- B60H1/00642—Control systems or circuits; Control members or indication devices for heating, cooling or ventilating devices
- B60H1/00735—Control systems or circuits characterised by their input, i.e. by the detection, measurement or calculation of particular conditions, e.g. signal treatment, dynamic models
- B60H1/00792—Arrangement of detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60H—ARRANGEMENTS OF HEATING, COOLING, VENTILATING OR OTHER AIR-TREATING DEVICES SPECIALLY ADAPTED FOR PASSENGER OR GOODS SPACES OF VEHICLES
- B60H1/00—Heating, cooling or ventilating [HVAC] devices
- B60H1/00642—Control systems or circuits; Control members or indication devices for heating, cooling or ventilating devices
- B60H1/00735—Control systems or circuits characterised by their input, i.e. by the detection, measurement or calculation of particular conditions, e.g. signal treatment, dynamic models
- B60H1/008—Control systems or circuits characterised by their input, i.e. by the detection, measurement or calculation of particular conditions, e.g. signal treatment, dynamic models the input being air quality
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60H—ARRANGEMENTS OF HEATING, COOLING, VENTILATING OR OTHER AIR-TREATING DEVICES SPECIALLY ADAPTED FOR PASSENGER OR GOODS SPACES OF VEHICLES
- B60H1/00—Heating, cooling or ventilating [HVAC] devices
- B60H1/24—Devices purely for ventilating or where the heating or cooling is irrelevant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60H—ARRANGEMENTS OF HEATING, COOLING, VENTILATING OR OTHER AIR-TREATING DEVICES SPECIALLY ADAPTED FOR PASSENGER OR GOODS SPACES OF VEHICLES
- B60H3/00—Other air-treating devices
- B60H3/06—Filtering
-
- G01N15/075—
Abstract
粉塵検出装置は、所定のセンシング箇所の粉塵濃度を検出する。そして、粉塵検出装置は、センシング箇所の粉塵濃度に応じたセンサ出力値(Vs)を出力する光学式粉塵センサ(321)と、センサ出力値を補正して得られる補正値(Vc)を、粉塵濃度を示す値として決定する補正部(322)とを備える。その補正部は、センサ出力値を一定とした場合にセンシング箇所の風速が低いほど補正値が粉塵濃度の低い側の値になるように、その補正値を決定する。
Description
本出願は、2017年1月18日に出願された日本特許出願番号2017-6972号に基づくもので、ここにその記載内容が参照により組み入れられる。
本開示は、光学式粉塵センサを用いて粉塵濃度を検出する粉塵検出装置に関するものである。
特許文献1には、光学式粉塵センサとして構成されたダストセンサが記載されている。その特許文献1のダストセンサは、パルス駆動する光源から光を照射し、発生パルスと同期した散乱光を受光素子で検出することにより粉塵量を検出する。そして、そのダストセンサは、受光素子出力の一定期間における最大値と平均値との差が所定値よりも大きいものをほこりと識別する。
また、特許文献1のダストセンサには識別手段が設けられている。その識別手段は、一定期間内に光源から一定周期で発光される連続発光パルスの散乱光が受光素子で受光された際に、前後に連続して受光パルスがない1本のみの単発受光パルスが存在した場合にはほこりと識別しない。
特許文献1のダストセンサは、上述したように、光を照射し散乱光を受光することで粉塵量(言い換えれば、粉塵濃度)を検出するタイプの光学式粉塵センサである。このような光学式粉塵センサでは、センシング箇所の実際の粉塵濃度が一定でも、そのセンシング箇所の風速変化に応じて、粉塵濃度を示すセンサ出力値が変化するということが発明者らによって見出された。例えばセンシング箇所の実際の粉塵濃度が一定で風速が変化した場合、光学式粉塵センサのセンサ出力値は、センシング箇所の風速が低いほど高い粉塵濃度を示すように変化する。そのため、センシング箇所の風速によっては、検出される粉塵濃度の精度が悪化する可能性がある。発明者らの詳細な検討の結果、以上のようなことが見出された。
本開示は上記点に鑑みて、センシング箇所の風速の影響を抑えてセンシング箇所の粉塵濃度を良好な精度で得ることが可能な粉塵検出装置を提供することを目的とする。
上記目的を達成するため、本開示の1つの観点によれば、粉塵検出装置は、
所定のセンシング箇所の粉塵濃度を検出する粉塵検出装置であって、
センシング箇所の粉塵濃度に応じたセンサ出力値を出力する光学式粉塵センサと、
センサ出力値を補正して得られる補正値を、粉塵濃度を示す値として決定する補正部とを備え、
補正部は、センサ出力値を一定とした場合にセンシング箇所の風速が低いほど補正値が粉塵濃度の低い側の値になるように、その補正値を決定する。
所定のセンシング箇所の粉塵濃度を検出する粉塵検出装置であって、
センシング箇所の粉塵濃度に応じたセンサ出力値を出力する光学式粉塵センサと、
センサ出力値を補正して得られる補正値を、粉塵濃度を示す値として決定する補正部とを備え、
補正部は、センサ出力値を一定とした場合にセンシング箇所の風速が低いほど補正値が粉塵濃度の低い側の値になるように、その補正値を決定する。
上述のように、センサ出力値を一定とした場合にセンシング箇所の風速が低いほど補正値が粉塵濃度の低い側の値になるように、その補正値は決定される。従って、その補正値が示す粉塵濃度は、センシング箇所の風速の影響が抑えられたものになる。そのため、その補正値によって、センシング箇所の粉塵濃度を良好な精度で得ることが可能である。
また、本開示の別の観点によれば、粉塵検出装置は、
所定のセンシング箇所の粉塵濃度を検出する粉塵検出装置であって、
センシング箇所の粉塵濃度に応じたセンサ出力値を出力する光学式粉塵センサと、
センサ出力値を補正して得られる補正値を、粉塵濃度を示す値として決定する補正部とを備え、
センサ出力値と実際の粉塵濃度とセンシング箇所の風速との所定の関係が予め定められており、
その所定の関係は、センシング箇所の風速が予め定められた基準風速である場合におけるセンサ出力値と実際の粉塵濃度との基準関係を含み、
補正部は、上記所定の関係において前記センシング箇所の風速と前記センサ出力値とに対応して得られる前記粉塵濃度に対応して前記基準関係から得た値に前記補正値がなるように、その補正値を決定する。
所定のセンシング箇所の粉塵濃度を検出する粉塵検出装置であって、
センシング箇所の粉塵濃度に応じたセンサ出力値を出力する光学式粉塵センサと、
センサ出力値を補正して得られる補正値を、粉塵濃度を示す値として決定する補正部とを備え、
センサ出力値と実際の粉塵濃度とセンシング箇所の風速との所定の関係が予め定められており、
その所定の関係は、センシング箇所の風速が予め定められた基準風速である場合におけるセンサ出力値と実際の粉塵濃度との基準関係を含み、
補正部は、上記所定の関係において前記センシング箇所の風速と前記センサ出力値とに対応して得られる前記粉塵濃度に対応して前記基準関係から得た値に前記補正値がなるように、その補正値を決定する。
このようにすれば、センシング箇所の風速の影響を、補正値が示す粉塵濃度から上記基準関係を用いて取り除くことができる。従って、このようにしても、補正値が示す粉塵濃度は、センシング箇所の風速の影響が抑えられたものになる。そのため、その補正値によって、センシング箇所の粉塵濃度を良好な精度で得ることが可能である。
以下、図面を参照しながら、各実施形態を説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
(第1実施形態)
本実施形態の粉塵検出装置32は、空調ユニット2の内部に形成された空気通路の粉塵濃度を検出する。そこで、先ず、その空調ユニット2の概略構成について説明する。
本実施形態の粉塵検出装置32は、空調ユニット2の内部に形成された空気通路の粉塵濃度を検出する。そこで、先ず、その空調ユニット2の概略構成について説明する。
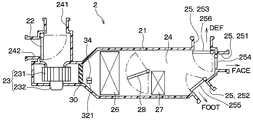
図1に示す空調ユニット2は、車室内の空調を行う車両用空調ユニットである。この空調ユニット2は、例えば車室内のうち車両前方側に配置されたインストルメントパネル内に設置される。
図1に示すように、空調ユニット2は、空調ケース21、内外気切替ドア22、送風機23、エバポレータ26、ヒータコア27、エアミックスドア28、空気フィルタ30、および粉塵検出装置32などを有している。
空調ケース21は、ある程度の弾性を有し、強度的にも優れた樹脂にて形成されている。空調ケース21を形成する樹脂として、例えばポリプロピレンが挙げられる。空調ケース21の内側には、空気が流れる空気通路すなわち通風路24が形成されている。また、空調ケース21は、通風路24の空気流れ方向上流側に、車室内の所定箇所から通風路24に内気を導入するための内気導入口241と、車外から通風路24に外気を導入するための外気導入口242とを有している。
なお、空調ケース21とは別部材として構成された図示していないダクトを内気導入口241または外気導入口242に接続してもよい。その場合、それらのダクトを介して、内気導入口241または外気導入口242から通風路24に空気が導入される。
また、空調ケース21は、通風路24の空気流れ方向下流側に、通風路24から車室内の前席領域に空気を送風するための複数の吹出開口部25を有している。その複数の吹出開口部25は、フェイス吹出開口部251とフット吹出開口部252とデフロスタ吹出開口部253とを含んでいる。
フェイス吹出開口部251は、前座席に着座した乗員の上半身に向けて空調風を吹き出すものである。フット吹出開口部252は、その乗員の足元に向けて空調風を吹き出すものである。デフロスタ吹出開口部253は、車両のフロントウインドウに向けて空調風を吹き出すものである。
なお、空調ケース21とは別部材として構成された図示していないダクトをフェイス吹出開口部251、フット吹出開口部252およびデフロスタ吹出開口部253に接続してもよい。その場合、フェイス吹出開口部251、フット吹出開口部252およびデフロスタ吹出開口部253から流出した空気は、それらのダクトを通り、車両に設けられた図示していないフェイス吹出口、フット吹出口およびデフロスタ吹出口から車室内へ供給される。
空調ケース21の内部には、内外気切替ドア22、送風機23、エバポレータ26、ヒータコア27、およびエアミックスドア28などが設けられている。
内外気切替ドア22は、内気導入口241の開口面積と外気導入口242の開口面積とを連続的に調整するものである。内外気切替ドア22は、図示していないサーボモータなどのアクチュエータによって駆動される。内外気切替ドア22は、内気導入口241と外気導入口242とのうち一方の導入口を開くほど他方の導入口を閉じるように回転動作する。これにより、内外気切替ドア22は、通風路24に導入される内気の風量と外気の風量との割合を調整することが可能である。
送風機23は、遠心ファン231と、その遠心ファン231を回転駆動するモータ232などから構成されている。送風機23のモータ232と共に遠心ファン231が回転駆動すると、通風路24に気流が形成される。これにより、内気導入口241または外気導入口242から通風路24に導入された空気は、その通風路24を流れ、フェイス吹出開口部251とフット吹出開口部252とデフロスタ吹出開口部253とのいずれかから吹き出される。フェイス吹出開口部251、フット吹出開口部252、およびデフロスタ吹出開口部253には、それぞれの開口面積を調整するためのフェイス吹出開口部ドア254、フット吹出開口部ドア255、およびデフロスタ吹出開口部ドア256が設けられている。
エバポレータ26は、通風路24を流れる空気を冷却するための熱交換器である。ヒータコア27は、通風路24を流れる空気を加熱するための熱交換器である。また、ヒータコア27は、エバポレータ26に対し空気流れ下流側に配置されている。
空調ユニット2のエバポレータ26とヒータコア27との間には、エアミックスドア28が設けられている。エアミックスドア28は、エバポレータ26を通過し、ヒータコア27を迂回して流れる風量と、エバポレータ26を通過した後にヒータコア27を通過する風量との割合を調整する。
図1および図2に示すように、空調制御装置40は、空調ユニット2を制御する制御装置である。具体的に、空調制御装置40は、空調ユニット2において種々の空調制御を行うマイクロコンピュータで構成された電子制御装置(すなわち、ECU)である。例えば、上述した送風機23、内外気切替ドア22、エアミックスドア28、フェイス吹出開口部ドア254、フット吹出開口部ドア255、およびデフロスタ吹出開口部ドア256は、空調制御装置40によって駆動制御される。
図1に示すように、空気フィルタ30は、空調ケース21の通風路24のうち送風機23とエバポレータ26との間に配置されている。言い換えれば、空気フィルタ30は、送風機23に対する空気流れ下流側で且つエバポレータ26に対する空気流れ上流側に配置されている。
空気フィルタ30は、その空気フィルタ30を通過する空気中に含まれるダスト等を或る程度捕捉する。従って、送風機23から吹き出された空気は、その空気中のダスト等が空気フィルタ30によって或る程度取り除かれてから、エバポレータ26へ流入する。
粉塵検出装置32は車両用の検出装置であり、車室内のうち所定のセンシング箇所の粉塵濃度を検出する。そして、粉塵検出装置32は、粉塵濃度を示す検出信号を空調制御装置40へ出力する。
粉塵検出装置32は、空調ケース21の通風路24のうち空気フィルタ30とエバポレータ26との間に配置されている。従って、上記センシング箇所すなわち検出箇所は、車室内に設けられた空調ユニット2内の一部(言い換えれば、空調ケース21内の一部)である。詳細には、そのセンシング箇所は、通風路24のうち、空気フィルタ30に対する空気流れ下流側で且つエバポレータ26に対する空気流れ上流側である。
図1および図2に示すように、粉塵検出装置32は、粉塵センサ321と補正部322とを備えている。その補正部322は、粉塵センサ321と一体構成になっている。粉塵検出装置32が、上記のように通風路24のうち送風機23とエバポレータ26との間に配置されているので、当然、粉塵センサ321および補正部322も、その送風機23とエバポレータ26との間に配置されている。
本実施形態の粉塵センサ321は、光散乱法により粉塵濃度を検出する粉塵センサ、要するに光学式粉塵センサである。つまり、粉塵センサ321は、光源と受光素子とを備え、散乱光を受光素子で検出することにより粉塵濃度を検出する。
そして、粉塵センサ321は、空調ユニット2内の一部であるセンシング箇所の粉塵濃度に応じたセンサ出力値Vsを出力する。このセンサ出力値Vsは本実施形態では電圧値であるので、センサ出力電圧Vsと言い換えることもできる。また、電圧値であるセンサ出力値Vsが大きいほど高い粉塵濃度が示されていることになる。
粉塵検出装置32の補正部322は、不図示のCPU、ROM、RAM等からなるマイクロコンピュータで構成されている。すなわち、補正部322は電子制御装置であり、例えば、ROMに記憶された制御プログラムに基づいて各種の演算および処理を行う。そのROM、RAMなどの半導体メモリは、非遷移的実体的記憶媒体である。
具体的に、本実施形態の補正部322は、センサ出力値Vsを補正して得られる補正値Vcを、センシング箇所の粉塵濃度を示す値として決定する。上記のようにセンサ出力値Vsが本実施形態では電圧値であるので、補正値Vcも電圧値である。従って、補正値Vcを補正電圧Vcと言い換えることもできる。また、センサ出力値Vsと同様に、電圧値である補正値Vcが大きいほど高い粉塵濃度が示されていることになる。
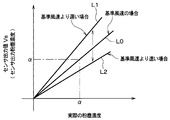
ここで、本実施形態の粉塵センサ321は光学式粉塵センサであるので、粉塵センサ321のセンサ出力値Vsは、センシング箇所の風速の影響を受ける。例えば図3に示すように、粉塵センサ321が予め定められた基準風速Sdの下で粉塵濃度を検出する場合において、センサ出力値Vsが示すセンサ出力粉塵濃度が実際の粉塵濃度に一致するように、センサ出力値Vsとセンサ出力粉塵濃度とが対応付けられているものとする。その場合、図3では、センサ出力値Vsと実際の粉塵濃度との関係は実線L0で表される。例えば、実線L0の関係である基準関係では、実際の粉塵濃度がαであれば、センサ出力粉塵濃度も同じαである。
これに対し、粉塵センサ321が基準風速Sdよりも遅い風速の下で粉塵濃度を検出する場合には、センサ出力値Vsと実際の粉塵濃度との関係は例えば実線L1で表される。そのため、センシング箇所の実際の粉塵濃度が一定であっても、そのセンシング箇所の風速が基準風速Sdよりも遅くなれば、センサ出力値Vsは、実際の粉塵濃度よりも高いセンサ出力粉塵濃度を示すことになる。
また、粉塵センサ321が基準風速Sdよりも速い風速の下で粉塵濃度を検出する場合には、センサ出力値Vsと実際の粉塵濃度との関係は例えば実線L2で表される。そのため、センシング箇所の実際の粉塵濃度が一定であっても、そのセンシング箇所の風速が基準風速Sdよりも速くなれば、センサ出力値Vsは、実際の粉塵濃度よりも低いセンサ出力粉塵濃度を示すことになる。
このように、センサ出力値Vsがセンシング箇所の風速に応じて変動するので、これを補正するために、粉塵検出装置32は、粉塵センサ321に加えて補正部322を備えている。そして、補正部322は、粉塵濃度の検出において風速の影響を抑えるために、図4のフローチャートに示す制御処理を実行する。
図4は、補正部322が実行する制御処理を示したフローチャートである。補正部322は、例えば、空調ユニット2の作動中に図4の制御処理を実行する。
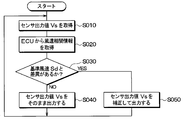
図4に示すように、補正部322は、まず、ステップS010にて、粉塵センサ321が出力するセンサ出力値Vsを取得する。ステップS010の次はステップS020へ進む。
ステップS020にて、補正部322は、センシング箇所の風速と相関関係にある風速相関情報を空調制御装置40から取得する。風速相関情報の例としては、送風機23のモータ232の回転速度、エアミックスドア28のドア位置、内外気切替ドア22のドア位置、吹出開口部ドア254、255、256の各ドア位置、および車速などを挙げることができる。補正部322は、この例示列挙した複数の情報の全部または何れかを取得する。
そして、補正部322は、その取得した風速相関情報に基づいてセンシング箇所の風速を推定する。例えば補正部322は、予め実験的に定められたマップを用いてそのセンシング箇所の風速を推定する。このように、本実施形態では、補正部322は、風速相関情報により、センシング箇所の風速を間接的に取得する。ステップS020の次はステップS030へ進む。
ステップS030にて、補正部322は、ステップS020にて得られたセンシング箇所の風速と予め定められた基準風速Sdとを比較する。その比較の結果、センシング箇所の風速と基準風速Sdとの間に差異があるか否かを判定する。その基準風速Sdの定め方には特に限定は無いが、例えば基準風速Sdは、センシング箇所にて変動しうる風速の範囲のうちの略中央値に設定されている。
例えばこのステップS030の判定は、センシング箇所の風速が基準風速Sdと厳密に一致しているか否かを判定するのではなく、基準風速Sdを中央値とした所定の基準風速範囲内にセンシング箇所の風速が入っているか否かを判定することによって行われる。その所定の基準風速範囲は、センサ出力値Vsに対する風速の影響を実質的に無視できる程度の範囲になるように予め実験的に設定されている。
そして、センシング箇所の風速が基準風速範囲から外れている場合には、補正部322は、センシング箇所の風速と基準風速Sdとの間に差異があると判定する。
逆に、センシング箇所の風速が基準風速範囲内に入っている場合には、補正部322は、センシング箇所の風速と基準風速Sdとの間に差異がないと判定する。すなわち、その場合、補正部322は、センシング箇所の風速が基準風速Sdであるとみなす。
ステップS030において、センシング箇所の風速と基準風速Sdとの間に差異があると判定した場合には、ステップS050へ進む。その一方で、センシング箇所の風速と基準風速Sdとの間に差異がないと判定した場合には、ステップS040へ進む。
ステップS040にて、補正部322は、ステップS010で取得したセンサ出力値Vsをそのまま補正値Vcとして決定し、その補正値Vcを空調制御装置40へ出力する。要するに、センサ出力値Vsを補正せず、センサ出力値Vsをそのまま空調制御装置40へ出力する。ステップS040の次はステップS010へ戻る。
ステップS050にて、補正部322は、センサ出力値Vsとセンシング箇所の風速とに基づいて補正値Vcを決定し、その補正値Vcを空調制御装置40へ出力する。要するに、センサ出力値Vsを補正して空調制御装置40へ出力する。
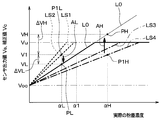
具体的には、補正値Vcは、予め定められた図5の補正マップを用いて決定される。この補正マップは、図3のグラフと同様にして実験的に得られるものであり、センサ出力値Vsと実際の粉塵濃度との関係をセンシング箇所の風速毎に示している。すなわち、図5の補正マップは、センサ出力値Vsと実際の粉塵濃度とセンシング箇所の風速との所定の関係として、予め定められている。
例えば、図5において実線L0は、センシング箇所の風速が基準風速Sdである場合におけるセンサ出力値Vsと実際の粉塵濃度との関係である基準関係を示している。また、破線LS1は、センシング箇所の風速が基準風速Sdよりも遅い風速S1である場合におけるセンサ出力値Vsと実際の粉塵濃度との関係を示している。また、破線LS2は、センシング箇所の風速が上記風速S1よりも遅い風速S2である場合におけるセンサ出力値Vsと実際の粉塵濃度との関係を示している。
また、一点鎖線LS3は、センシング箇所の風速が基準風速Sdよりも速い風速S3である場合におけるセンサ出力値Vsと実際の粉塵濃度との関係を示している。また、一点鎖線LS4は、センシング箇所の風速が上記風速S3よりも速い風速S4である場合におけるセンサ出力値Vsと実際の粉塵濃度との関係を示している。
なお、図5の縦軸に示された電圧Vocはセンサ出力値Vsの下限値であり、電圧Vuはセンサ出力値Vsの上限値である。また、図5では、センサ出力値Vsと実際の粉塵濃度との関係を示す関係線L0、LS1~LS4は5本例示されているだけであるが、これは図5が模式図だからであり、実際の補正マップは多数の上記関係線で構成される。
次に、センサ出力値Vsとして得られた或る値(具体的には、電圧V1)を補正部322が補正して補正値Vcを得る場合、要するにセンサ出力値Vsが電圧V1である場合を例として、どのように補正値Vcが決定されるかについて説明する。
例えばセンシング箇所の風速が風速S1である場合には、図5の補正マップにおいて、センサ出力値Vsと実際の粉塵濃度との関係を示す関係線として破線LS1が採用される。そして、上述のようにセンサ出力値Vsは電圧V1であるので、その破線LS1上でセンサ出力値Vsが電圧V1になる点P1Lが認定されると共に、実線L0上で、実際の粉塵濃度がその点P1Lと同じ大きさになる点PLが認定される。その点PLが認定されると、その点PLが示す電圧VLが補正値Vcとして決定される。
別言すれば、補正部322は、図5の補正マップにおいてセンシング箇所の風速S1と、センサ出力値Vsとして得られた或る値である電圧V1とに対応して粉塵濃度αLを得る。そして、補正部322は、その得られた粉塵濃度αLに対応して実線L0の関係から得た値(すなわち、電圧VL)に補正値Vcがなるように、その補正値Vcを決定する。
従って、この場合、センサ出力値Vsと補正値Vcとの差である補正量は、零よりも大きいΔVLである。そして、補正値Vcは、センサ出力値Vsから図5の矢印ALのように補正して得られた値である電圧VLになる。すなわち、図5の補正マップにおいて「VL=V1-ΔVL」という関係から判るように、補正部322は、センシング箇所の風速が基準風速Sdよりも低い場合には、センサ出力値Vsに対し補正値Vcを粉塵濃度の低い側の値にする。その粉塵濃度の低い側の値とは、具体的に言えば低電圧側の値である。
また、複数の関係線L0、LS1、LS2から判るように、補正部322は、センシング箇所の風速が基準風速Sdよりも低い場合には、センシング箇所の風速が低いほどセンサ出力値Vsと補正値Vcとの差を大きくする。
センシング箇所の風速が基準風速Sdよりも遅い風速S1である場合の補正値Vcは以上のようにして決定される。例えば仮に、空調制御装置40がセンサ出力値Vsとしての電圧V1をそのまま検出信号として取得していたとすれば、空調制御装置40は粉塵濃度をα1として誤った認識をする。これに対し、この図5の補正マップを用いた補正により、空調制御装置40は補正値Vcとしての電圧VLを検出信号として取得するので、粉塵濃度をαLとして正確に認識することができる。
また、センシング箇所の風速が基準風速Sdよりも速い風速S4である場合も、補正値Vcは上記と同様にして決定される。すなわち、センシング箇所の風速が風速S4である場合には、図5の補正マップにおいて、センサ出力値Vsと実際の粉塵濃度との関係を示す関係線として破線LS4が採用される。そして、上述のようにセンサ出力値Vsは電圧V1であるので、その破線LS4上でセンサ出力値Vsが電圧V1になる点P1Hが認定されると共に、実線L0上で、実際の粉塵濃度がその点P1Hと同じ大きさになる点PHが認定される。その点PHが認定されると、その点PHが示す電圧VHが補正値Vcとして決定される。
別言すれば、補正部322は、図5の補正マップにおいてセンシング箇所の風速S4と、センサ出力値Vsとして得られた或る値である電圧V1とに対応して粉塵濃度αHを得る。そして、補正部322は、その得られた粉塵濃度αHに対応して実線L0の関係から得た値(すなわち、電圧VH)に補正値Vcがなるように、その補正値Vcを決定する。
従って、この場合、センサ出力値Vsと補正値Vcとの差である補正量は、零よりも大きいΔVHである。そして、補正値Vcは、センサ出力値Vsから図5の矢印AHのように補正して得られた値である電圧VHになる。すなわち、図5の補正マップにおいて「VH=V1+ΔVH」という関係から判るように、補正部322は、センシング箇所の風速が基準風速Sdよりも高い場合には、センサ出力値Vsに対し補正値Vcを粉塵濃度の高い側の値にする。その粉塵濃度の高い側の値とは、具体的に言えば高電圧側の値である。
また、複数の関係線L0、LS3、LS4から判るように、補正部322は、センシング箇所の風速が基準風速Sdよりも高い場合には、センシング箇所の風速が高いほどセンサ出力値Vsと補正値Vcとの差を大きくする。
センシング箇所の風速が基準風速Sdよりも速い風速S4である場合の補正値Vcは以上のようにして決定される。そして、この図5の補正マップを用いた補正により、空調制御装置40は補正値Vcとしての電圧VHを検出信号として取得するので、粉塵濃度をαHとして正確に認識することができる。
また、図5の補正マップから判るように、基準風速Sdに対するセンシング箇所の風速の高低に拘わらず、補正部322は、センサ出力値Vsを一定とした場合にセンシング箇所の風速が低いほど補正値Vcが粉塵濃度の低い側の値になるように、その補正値Vcを決定する。ここで、センサ出力値Vsを一定とした場合という条件があるのは、補正値Vcはセンサ出力値Vsが変動した場合にもそのセンサ出力値Vsに応じて変動する値だからである。すなわち、センサ出力値Vsを一定とした場合とは、センサ出力値Vsを或る値(例えば、電圧V1)とした場合という意味である。従って、そのセンサ出力値Vsを一定とした場合を、センサ出力値Vsとして得られた或る値を補正部322が補正して補正値Vcを得る場合と言い換えても差し支えない。ステップS050の次はステップS010へ戻る。
なお、上述した図4の各ステップでの処理は、それぞれの機能を実現する機能部を構成している。後述する図7および図10のフローチャートでも同様である。
上述したように、本実施形態によれば、図5に示すように、センサ出力値Vsを一定とした場合にセンシング箇所の風速が低いほど補正値Vcが粉塵濃度の低い側の値になるように、その補正値Vcは決定される。従って、その補正値Vcが示す粉塵濃度は、センシング箇所の風速の影響が抑えられたものになる。そのため、その補正値Vcによって、センシング箇所の粉塵濃度を、安定して良好な精度で得ることが可能である。
また、本実施形態によれば、図4および図5に示すように、補正部322は、センシング箇所の風速と基準風速Sdとの間に差異がない場合には、センサ出力値Vsをそのまま補正値Vcとして決定する。そして、補正部322は、センシング箇所の風速が基準風速Sdよりも高い場合には、センサ出力値Vsに対し補正値Vcを粉塵濃度の高い側の値にして、且つ、センシング箇所の風速が高いほどセンサ出力値Vsと補正値Vcとの差を大きくする。その一方で、補正部322は、センシング箇所の風速が基準風速Sdよりも低い場合には、センサ出力値Vsに対し補正値Vcを粉塵濃度の低い側の値にして、且つ、センシング箇所の風速が低いほどセンサ出力値Vsと補正値Vcとの差を大きくする。従って、センシング箇所の風速が基準風速Sdより高い場合にも低い場合にも、具体的な光学式の粉塵センサ321の特性に合わせて補正値Vcを適切に決定することができる。
また、本実施形態によれば、図4に示すように、補正部322は、センシング箇所の風速と相関関係にある風速相関情報に基づいてそのセンシング箇所の風速を推定する。従って、風速センサなどの検出器が無くても、センシング箇所の風速を取得することが可能である。
また、本実施形態によれば、補正部322は、図5の補正マップにおいてセンシング箇所の風速と、センサ出力値Vsとして得られた或る値(例えば、電圧V1)とに対応して粉塵濃度を得る。そして、補正部322は、その得られた粉塵濃度に対応して実線L0の関係から得た値(例えば、電圧VLまたは電圧VH)に補正値Vcがなるように、その補正値Vcを決定する。
これにより、センシング箇所の風速の影響を、補正値Vcが示す粉塵濃度から実線L0の関係を用いて取り除くことができる。従って、補正値Vcが示す粉塵濃度は、センシング箇所の風速の影響が抑えられたものになる。そのため、その補正値Vcによって、センシング箇所の粉塵濃度を良好な精度で得ることが可能である。なお、上記のセンサ出力値Vsとして得られた或る値は、例えば図5では電圧V1であるが、特定の大きさの値に限定されるものではない。
(第2実施形態)
次に、第2実施形態について説明する。本実施形態では、前述の第1実施形態と異なる点を主として説明する。また、前述の実施形態と同一または均等な部分については省略または簡略化して説明する。このことは後述の実施形態の説明においても同様である。
次に、第2実施形態について説明する。本実施形態では、前述の第1実施形態と異なる点を主として説明する。また、前述の実施形態と同一または均等な部分については省略または簡略化して説明する。このことは後述の実施形態の説明においても同様である。
図6に示すように、粉塵検出装置32のうちの補正部322は空調制御装置40に含まれている。例えば、その補正部322は、空調制御装置40のうちの1つの機能部を構成している。この点において本実施形態は第1実施形態と異なっている。
従って、本実施形態の補正部322は空調ケース21の通風路24に配置されるものではないが、粉塵検出装置32のうちの粉塵センサ321は、図1に示すように、第1実施形態と同様に通風路24に配置されている。要するに、粉塵センサ321は、空調制御装置40とは別に設けられている。
本実施形態の補正部322は、例えば、空調ユニット2の作動中に図7の制御処理を実行する。図7の制御処理は、基本的に第1実施形態の図4の制御処理と同様であるが、補正部322が空調制御装置40に含まれることに関連した点においてのみ図4の制御処理とは異なる。
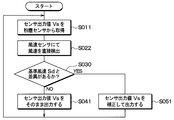
図7に示すように、本実施形態の補正部322は、まず、ステップS011にて、粉塵センサ321が出力するセンサ出力値Vsを取得する。このセンサ出力値Vsは、空調制御装置40に接続されたセンサ等からの検出信号の1つとして空調制御装置40へ入力される。ステップS011の次はステップS021へ進む。
ステップS021にて、補正部322は、例えば空調制御装置40のうちの他の機能部から風速相関情報を取得する。この点を除き、このステップS021は図4のステップS020と同様である。
そして、補正部322は、図4のステップS020と同様に、取得した風速相関情報に基づいてセンシング箇所の風速を推定する。ステップS021の次はステップS030へ進む。
図7のステップS030は図4のステップS030と同様であるので、その説明を省略する。
図7のステップS030において、センシング箇所の風速と基準風速Sdとの間に差異があると判定した場合には、ステップS051へ進む。その一方で、センシング箇所の風速と基準風速Sdとの間に差異がないと判定した場合には、ステップS041へ進む。
ステップS041にて、補正部322は、ステップS011で取得したセンサ出力値Vsをそのまま補正値Vcとして決定する。そして、補正部322は、例えば、空調制御装置40のうちの補正部322以外の他の機能部、または、空調制御装置40に接続された表示装置などの外部機器へ、その決定した補正値Vcを出力する。要するに、補正部322は、センサ出力値Vsをそのまま出力する。このように、ステップS041では、補正部322からの出力先は図4のステップS040と異なるが、それ以外の点では、ステップS041は図4のステップS040と同様である。図7においてステップS041の次はステップS011へ戻る。
ステップS051にて、補正部322は、センサ出力値Vsとセンシング箇所の風速とに基づいて補正値Vcを決定する。ステップS051における補正値Vcの決定方法は、図4のステップS050と同様である。そして、補正部322は、例えば、空調制御装置40のうちの補正部322以外の他の機能部、または、空調制御装置40に接続された表示装置などの外部機器へ、その決定した補正値Vcを出力する。要するに、補正部322は、センサ出力値Vsを補正して出力する。
このように、ステップS051では、補正部322からの出力先は図4のステップS050と異なるが、それ以外の点では、ステップS051は図4のステップS050と同様である。図7においてステップS051の次はステップS011へ戻る。
以上説明したことを除き、本実施形態は第1実施形態と同様である。そして、本実施形態では、前述の第1実施形態と共通の構成から奏される効果を第1実施形態と同様に得ることができる。
また、本実施形態によれば、図6に示すように、補正部322は空調制御装置40に含まれ、粉塵センサ321は、その空調制御装置40とは別に設けられている。従って、補正部322が空調制御装置40とは別に設けられる場合と比較して、補正部322を構成するハードウェアの部品点数を削減することが可能である。
(第3実施形態)
次に、第3実施形態について説明する。本実施形態では、前述の第2実施形態と異なる点を主として説明する。
次に、第3実施形態について説明する。本実施形態では、前述の第2実施形態と異なる点を主として説明する。
図8に示すように、空調ユニット2は風速センサ34を備えている。この点において本実施形態は第2実施形態と異なっている。
具体的に、風速センサ34は粉塵センサ321のセンシング箇所の風速を検出するので、粉塵センサ321と同じ場所に設けられている。すなわち、風速センサ34は、空調ケース21の通風路24のうち、空気フィルタ30の空気流れ下流側で且つエバポレータ26の空気流れ上流側に配置されている。そして、図9に示すように、センシング箇所の風速を表す検出信号は風速センサ34から空調制御装置40へ入力されるようになっている。
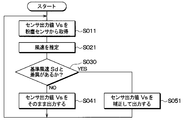
本実施形態の補正部322は、例えば、空調ユニット2の作動中に図10の制御処理を実行する。図10の制御処理は、基本的に第2実施形態の図7の制御処理と同様であるが、センシング箇所の風速の取得方法だけが図7の制御処理と異なる。具体的には、図10のステップS011、S030、S041、S051は図7のステップS011、S030、S041、S051とそれぞれ同じである。従って、それらのステップの説明を省略し、図10のステップS022について以下に説明する。
図10に示すように、ステップS011に続くステップS022にて、補正部322は、風速センサ34から粉塵センサ321のセンシング箇所の風速を取得する。従って、本実施形態では、そのセンシング箇所の風速は風速相関情報に基づいて推定されるものではなく、風速センサ34により直接検出される。ステップS022の次はステップS030へ進む。
以上説明したことを除き、本実施形態は第2実施形態と同様である。そして、本実施形態では、前述の第2実施形態と共通の構成から奏される効果を第2実施形態と同様に得ることができる。
また、本実施形態によれば、図8および図10に示すように、粉塵センサ321のセンシング箇所の風速を検出する風速センサ34が設けられている。そして、補正部322は、その風速センサ34からそのセンシング箇所の風速を取得する。従って、そのセンシング箇所の風速を簡単に且つ精度良く取得することが可能である。
なお、本実施形態は第2実施形態に基づいた変形例であるが、本実施形態を前述の第1実施形態と組み合わせることも可能である。
(他の実施形態)
(1)上述の各実施形態では、図1および図8に示すように、粉塵センサ321のセンシング箇所は、空調ケース21内の通風路24のうち、空気フィルタ30の空気流れ下流側で且つエバポレータ26の空気流れ上流側であるが、これは一例である。そのセンシング箇所は、例えば複数の吹出開口部251、252、253のうちの何れかであってもよい。或いは、そのセンシング箇所は、空調ユニット2内でなくてもよい。
(1)上述の各実施形態では、図1および図8に示すように、粉塵センサ321のセンシング箇所は、空調ケース21内の通風路24のうち、空気フィルタ30の空気流れ下流側で且つエバポレータ26の空気流れ上流側であるが、これは一例である。そのセンシング箇所は、例えば複数の吹出開口部251、252、253のうちの何れかであってもよい。或いは、そのセンシング箇所は、空調ユニット2内でなくてもよい。
(2)上述の各実施形態では、センサ出力値Vsおよび補正値Vcは電圧値であるが、粉塵濃度を示すことができれば電圧値以外の物理量であっても差し支えない。
(3)上述の各実施形態において、粉塵センサ321は、センサ出力値Vsとしての出力電圧が大きいほど高い粉塵濃度を示すセンサであるが、これは一例である。逆に、粉塵センサ321は、出力電圧が小さいほど高い粉塵濃度を示すセンサであっても差し支えない。このようなセンサでは、センサ出力値Vsの低電圧側は、そのセンサ出力値Vsが示す粉塵濃度の高い側になる。
(4)上述の各実施形態の図4、図7、図10のフローチャートにおいて、例えばステップS030の判定は、基準風速Sdを中央値とした所定の基準風速範囲内にセンシング箇所の風速が入っているか否かを判定することによって行われるが、これは一例である。例えばステップS030の判定は、センシング箇所の風速と基準風速Sdとが相互に比較され、そのセンシング箇所の風速が基準風速Sdに一致しているか否かが判定されることによって行われてもよい。
(5)上述の各実施形態において、図4、図7、及び図10のフローチャートに示す各ステップの処理はコンピュータプログラムによって実現されるものであるが、ハードロジックで構成されるものであっても差し支えない。
(6)なお、本開示は、上述の実施形態に限定されることなく、種々変形して実施することができる。また、上記各実施形態は、互いに無関係なものではなく、組み合わせが明らかに不可な場合を除き、適宜組み合わせが可能である。また、上記各実施形態において、実施形態を構成する要素は、特に必須であると明示した場合および原理的に明らかに必須であると考えられる場合等を除き、必ずしも必須のものではないことは言うまでもない。
また、上記各実施形態において、実施形態の構成要素の個数、数値、量、範囲等の数値が言及されている場合、特に必須であると明示した場合および原理的に明らかに特定の数に限定される場合等を除き、その特定の数に限定されるものではない。また、上記各実施形態において、構成要素等の材質、形状、位置関係等に言及するときは、特に明示した場合および原理的に特定の材質、形状、位置関係等に限定される場合等を除き、その材質、形状、位置関係等に限定されるものではない。
(まとめ)
上記各実施形態の一部または全部で示された第1の観点によれば、補正部は、センサ出力値を一定とした場合にセンシング箇所の風速が低いほど補正値が粉塵濃度の低い側の値になるように、その補正値を決定する。
上記各実施形態の一部または全部で示された第1の観点によれば、補正部は、センサ出力値を一定とした場合にセンシング箇所の風速が低いほど補正値が粉塵濃度の低い側の値になるように、その補正値を決定する。
また、第2の観点によれば、補正部は、センシング箇所の風速と予め定められた基準風速との間に差異がない場合には、センサ出力値をそのまま補正値として決定する。そして、補正部は、センシング箇所の風速が基準風速よりも高い場合には、センサ出力値に対し補正値を粉塵濃度の高い側の値にして、且つ、センシング箇所の風速が高いほどセンサ出力値と補正値との差を大きくする。従って、センシング箇所の風速が基準風速よりも高い場合に、具体的な光学式粉塵センサの特性に合わせて補正値を適切に決定することができる。
また、第3の観点によれば、補正部は、センシング箇所の風速と予め定められた基準風速との間に差異がない場合には、センサ出力値をそのまま補正値として決定する。そして、補正部は、センシング箇所の風速が基準風速よりも低い場合には、センサ出力値に対し補正値を粉塵濃度の低い側の値にして、且つ、センシング箇所の風速が低いほどセンサ出力値と補正値との差を大きくする。従って、センシング箇所の風速が基準風速よりも低い場合に、具体的な光学式粉塵センサの特性に合わせて補正値を適切に決定することができる。
また、第4の観点によれば、センサ出力値を一定とした場合とは、センサ出力値として得られた或る値を補正して補正値を得る場合である。
また、第5の観点によれば、センサ出力値と実際の粉塵濃度とセンシング箇所の風速との所定の関係が予め定められている。その所定の関係は、センシング箇所の風速が予め定められた基準風速である場合におけるセンサ出力値と実際の粉塵濃度との基準関係を含む。そして、補正部は、上記所定の関係においてセンシング箇所の風速とセンサ出力値とに対応して得られる粉塵濃度に対応して基準関係から得た値に補正値がなるように、その補正値を決定する。
また、第6の観点によれば、補正部は、センシング箇所の風速と相関関係にある風速相関情報に基づいてそのセンシング箇所の風速を推定する。従って、風速センサなどの検出器が無くても、センシング箇所の風速を取得することが可能である。
また、第7の観点によれば、補正部は、センシング箇所の風速を検出する風速センサからそのセンシング箇所の風速を取得する。従って、センシング箇所の風速を簡単に且つ精度良く取得することが可能である。
また、第8の観点によれば、センサ出力値および補正値は電圧値である。従って、一般的な光学式粉塵センサを利用することが可能である。
また、第9の観点によれば、補正部は、空調ユニットを制御する制御装置に含まれ、光学式粉塵センサは、その制御装置とは別に設けられる。従って、補正部が制御装置とは別に設けられる場合と比較して、補正部を構成するハードウェアの部品点数を削減することが可能である。
Claims (9)
- 所定のセンシング箇所の粉塵濃度を検出する粉塵検出装置であって、
前記センシング箇所の粉塵濃度に応じたセンサ出力値(Vs)を出力する光学式粉塵センサ(321)と、
前記センサ出力値を補正して得られる補正値(Vc)を、前記粉塵濃度を示す値として決定する補正部(322)とを備え、
前記補正部は、前記センサ出力値を一定とした場合に前記センシング箇所の風速が低いほど前記補正値が前記粉塵濃度の低い側の値になるように、該補正値を決定する粉塵検出装置。 - 前記補正部は、
前記センシング箇所の風速と予め定められた基準風速(Sd)との間に差異がない場合には、前記センサ出力値をそのまま前記補正値として決定し、
前記センシング箇所の風速が前記基準風速よりも高い場合には、前記センサ出力値に対し前記補正値を前記粉塵濃度の高い側の値にして、且つ、前記センシング箇所の風速が高いほど前記センサ出力値と前記補正値との差を大きくする請求項1に記載の粉塵検出装置。 - 前記補正部は、
前記センシング箇所の風速と予め定められた基準風速(Sd)との間に差異がない場合には、前記センサ出力値をそのまま前記補正値として決定し、
前記センシング箇所の風速が前記基準風速よりも低い場合には、前記センサ出力値に対し前記補正値を前記粉塵濃度の低い側の値にして、且つ、前記センシング箇所の風速が低いほど前記センサ出力値と前記補正値との差を大きくする請求項1に記載の粉塵検出装置。 - 前記センサ出力値を一定とした場合とは、前記センサ出力値として得られた或る値(V1)を補正して前記補正値を得る場合である請求項1ないし3のいずれか1つに記載の粉塵検出装置。
- 所定のセンシング箇所の粉塵濃度を検出する粉塵検出装置であって、
前記センシング箇所の粉塵濃度に応じたセンサ出力値(Vs)を出力する光学式粉塵センサ(321)と、
前記センサ出力値を補正して得られる補正値(Vc)を、前記粉塵濃度を示す値として決定する補正部(322)とを備え、
前記センサ出力値と実際の前記粉塵濃度と前記センシング箇所の風速との所定の関係が予め定められており、
該所定の関係は、前記センシング箇所の風速が予め定められた基準風速(Sd)である場合における前記センサ出力値と実際の前記粉塵濃度との基準関係(L0)を含み、
前記補正部は、前記所定の関係において前記センシング箇所の風速と前記センサ出力値とに対応して得られる前記粉塵濃度に対応して前記基準関係から得た値に前記補正値がなるように、該補正値を決定する粉塵検出装置。 - 前記補正部は、前記センシング箇所の風速と相関関係にある風速相関情報に基づいて該センシング箇所の風速を推定する請求項1ないし5のいずれか1つに記載の粉塵検出装置。
- 前記補正部は、前記センシング箇所の風速を検出する風速センサ(34)から該センシング箇所の風速を取得する請求項1ないし5のいずれか1つに記載の粉塵検出装置。
- 前記センサ出力値および前記補正値は電圧値である請求項1ないし7のいずれか1つに記載の粉塵検出装置。
- 前記センシング箇所は、車室内に設けられた空調ユニット(2)内の一部であり、
前記補正部は、前記空調ユニットを制御する制御装置(40)に含まれ、
前記光学式粉塵センサは、前記制御装置とは別に設けられる請求項1ないし8のいずれか1つに記載の粉塵検出装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201780083657.0A CN110192095B (zh) | 2017-01-18 | 2017-12-27 | 粉尘检测装置 |
| EP17892700.0A EP3572786B1 (en) | 2017-01-18 | 2017-12-27 | Dust detecting device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017006972A JP2018115959A (ja) | 2017-01-18 | 2017-01-18 | 粉塵検出装置 |
| JP2017-006972 | 2017-01-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018135284A1 true WO2018135284A1 (ja) | 2018-07-26 |
Family
ID=62908990
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/047107 WO2018135284A1 (ja) | 2017-01-18 | 2017-12-27 | 粉塵検出装置 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3572786B1 (ja) |
| JP (1) | JP2018115959A (ja) |
| CN (1) | CN110192095B (ja) |
| WO (1) | WO2018135284A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7188066B2 (ja) * | 2018-12-27 | 2022-12-13 | 株式会社デンソー | 粉塵検出装置 |
| WO2022176727A1 (ja) * | 2021-02-16 | 2022-08-25 | 株式会社ヴァレオジャパン | 車両用空調装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003065940A (ja) | 2001-06-12 | 2003-03-05 | Matsushita Electric Works Ltd | ダストセンサー及び空気清浄機 |
| JP2006290001A (ja) * | 2005-04-05 | 2006-10-26 | Denso Corp | 車両用空気清浄器 |
| JP2016023867A (ja) * | 2014-07-22 | 2016-02-08 | ダイキン工業株式会社 | 空気清浄機 |
| JP2017116417A (ja) * | 2015-12-24 | 2017-06-29 | シャープ株式会社 | 光電式ほこりセンサおよび空調機器 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1139813C (zh) * | 2001-02-26 | 2004-02-25 | 电站锅炉煤清洁燃烧国家工程研究中心 | 含尘气流流量和浓度的在线监测方法及装置 |
| CN203798704U (zh) * | 2014-04-28 | 2014-08-27 | 徐州市计量检定测试中心 | 新型直读式粉尘浓度测量仪检定校准装置 |
-
2017
- 2017-01-18 JP JP2017006972A patent/JP2018115959A/ja active Pending
- 2017-12-27 EP EP17892700.0A patent/EP3572786B1/en active Active
- 2017-12-27 CN CN201780083657.0A patent/CN110192095B/zh active Active
- 2017-12-27 WO PCT/JP2017/047107 patent/WO2018135284A1/ja unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003065940A (ja) | 2001-06-12 | 2003-03-05 | Matsushita Electric Works Ltd | ダストセンサー及び空気清浄機 |
| JP2006290001A (ja) * | 2005-04-05 | 2006-10-26 | Denso Corp | 車両用空気清浄器 |
| JP2016023867A (ja) * | 2014-07-22 | 2016-02-08 | ダイキン工業株式会社 | 空気清浄機 |
| JP2017116417A (ja) * | 2015-12-24 | 2017-06-29 | シャープ株式会社 | 光電式ほこりセンサおよび空調機器 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3572786A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3572786B1 (en) | 2023-02-08 |
| CN110192095B (zh) | 2022-03-25 |
| JP2018115959A (ja) | 2018-07-26 |
| EP3572786A4 (en) | 2020-01-29 |
| EP3572786A1 (en) | 2019-11-27 |
| CN110192095A (zh) | 2019-08-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8733428B2 (en) | Air conditioning system for vehicle | |
| US9643472B2 (en) | Air-conditioner for vehicle | |
| JP5128977B2 (ja) | 自動車用空気調和装置 | |
| JP5217749B2 (ja) | 車両のバッテリ冷却システム | |
| US20160052363A1 (en) | Method for Controlling a Ventilation/Air-Conditioning System of a Vehicle, and Vehicle Having Such a Ventilation/Air-Conditioning System | |
| US10696143B2 (en) | Apparatus of improving vehicle indoor air quality by using air dust concentration data corrected from the outside of vehicle and purifying vehicle indoor air | |
| WO2018135284A1 (ja) | 粉塵検出装置 | |
| JPH1134637A (ja) | 車両用空調装置 | |
| WO2019045009A1 (ja) | 埃濃度検出装置 | |
| US20180195946A1 (en) | Dust sensor having flow rate control function | |
| US10556480B2 (en) | Vehicle HVAC system | |
| WO2017110244A1 (ja) | 車両用空調装置 | |
| WO2018100921A1 (ja) | 車両用空調装置 | |
| CN113498386B (zh) | 颗粒浓度检测装置 | |
| KR101827165B1 (ko) | 차량의 실내 공기 오염 저감 장치 | |
| US20190016192A1 (en) | Vehicular air conditioner | |
| CN109421477A (zh) | 机动车空调系统 | |
| JP2020121698A (ja) | 車両用空調装置 | |
| CN113242807B (zh) | 车辆用空调装置 | |
| KR101610968B1 (ko) | 차량 내 이산화탄소 제어 시스템 및 방법 | |
| JP2007022312A (ja) | 車両用空調装置 | |
| KR20160015464A (ko) | 차량용 공조장치 | |
| WO2019021682A1 (ja) | 車両用空調装置 | |
| JP7188066B2 (ja) | 粉塵検出装置 | |
| US11712944B2 (en) | Air conditioner for vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17892700 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2017892700 Country of ref document: EP Effective date: 20190819 |