WO2017199669A1 - 水中移動ビークル - Google Patents
水中移動ビークル Download PDFInfo
- Publication number
- WO2017199669A1 WO2017199669A1 PCT/JP2017/015744 JP2017015744W WO2017199669A1 WO 2017199669 A1 WO2017199669 A1 WO 2017199669A1 JP 2017015744 W JP2017015744 W JP 2017015744W WO 2017199669 A1 WO2017199669 A1 WO 2017199669A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- underwater
- vehicle
- screw propeller
- water
- weight
- Prior art date
Links
Images


















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/14—Control of attitude or depth
- B63G8/16—Control of attitude or depth by direct use of propellers or jets
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H5/00—Arrangements on vessels of propulsion elements directly acting on water
- B63H5/07—Arrangements on vessels of propulsion elements directly acting on water of propellers
- B63H5/14—Arrangements on vessels of propulsion elements directly acting on water of propellers characterised by being mounted in non-rotating ducts or rings, e.g. adjustable for steering purpose
- B63H5/15—Nozzles, e.g. Kort-type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63C—LAUNCHING, HAULING-OUT, OR DRY-DOCKING OF VESSELS; LIFE-SAVING IN WATER; EQUIPMENT FOR DWELLING OR WORKING UNDER WATER; MEANS FOR SALVAGING OR SEARCHING FOR UNDERWATER OBJECTS
- B63C11/00—Equipment for dwelling or working underwater; Means for searching for underwater objects
- B63C11/48—Means for searching for underwater objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H5/00—Arrangements on vessels of propulsion elements directly acting on water
- B63H5/07—Arrangements on vessels of propulsion elements directly acting on water of propellers
- B63H5/08—Arrangements on vessels of propulsion elements directly acting on water of propellers of more than one propeller
- B63H5/10—Arrangements on vessels of propulsion elements directly acting on water of propellers of more than one propeller of coaxial type, e.g. of counter-rotative type
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21C—NUCLEAR REACTORS
- G21C17/00—Monitoring; Testing ; Maintaining
- G21C17/003—Remote inspection of vessels, e.g. pressure vessels
- G21C17/01—Inspection of the inner surfaces of vessels
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21C—NUCLEAR REACTORS
- G21C17/00—Monitoring; Testing ; Maintaining
- G21C17/003—Remote inspection of vessels, e.g. pressure vessels
- G21C17/013—Inspection vehicles
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21C—NUCLEAR REACTORS
- G21C17/00—Monitoring; Testing ; Maintaining
- G21C17/017—Inspection or maintenance of pipe-lines or tubes in nuclear installations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/001—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations
- B63G2008/002—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned
- B63G2008/005—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned remotely controlled
- B63G2008/007—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned remotely controlled by means of a physical link to a base, e.g. wire, cable or umbilical
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E30/00—Energy generation of nuclear origin
- Y02E30/30—Nuclear fission reactors
Abstract
ビークルの運動性能を向上させ、かつビークルの位置を安定的に保つことができる水中移動ビークルを提供する。 【解決手段】水中移動ビークルは、重量が水中で生じる浮力よりも大きくなるように予め設定されたビークル本体(1)と、スクリュープロペラ(21)を駆動させることで上向きの推力を発生させる推力部(32)と、スクリュープロペラ(21)の駆動を調節し、重量と浮力の差分相当の上向きの推力を発生させることでビークル本体(1)の水深を所定の位置に制御する駆動調節部(50)と、スクリュープロペラ(21)により生じる下向きの水流を偏向させることでビークル本体(1)を水平方向に移動させる水流偏向部(34)とを備える。
Description
本発明の実施形態は、水中を水平方向に移動可能な水中移動ビークルに関する。
従来、原子炉圧力容器の内部などの狭い空間の調査に小型の水中用ビークルが用いられる。このようなビークルは、前後移動用の2個のスクリュープロペラを有するとともに、昇降用の2個のスクリュープロペラを有している。そして、これらスクリュープロペラを駆動させることで、ビークルが前後移動や昇降や旋回を行うようにしている。
前述の技術にあっては、小さな筐体の限られた寸法内に4個のスクリュープロペラを配置するため、小型のスクリュープロペラを用いなければならない。これらスクリュープロペラは、小型であるために推力が弱く、運動性能が低下してしまう。さらに、スクリュープロペラの推力が弱くても推進できるように、ビークルが水中で浮遊状態(中性浮力)になるように重量が調節される。そのため、ビークルがケーブルや周囲の水流の影響を受け易く、スクリュープロペラを停止させた状態では、ビークルの位置を安定的に保つことができないという課題がある。
本発明の実施形態はこのような事情を考慮してなされたもので、ビークルの運動性能を向上させ、かつビークルの位置を安定的に保つことができる水中移動ビークルを提供することを目的とする。
本発明の実施形態に係る水中移動ビークルは、重量が水中で生じる浮力よりも大きくなるように予め設定されたビークル本体と、スクリュープロペラを駆動させることで上向きの推力を発生させる推力部と、前記スクリュープロペラの駆動を調節し、前記重量と前記浮力の差分相当の前記上向きの推力を発生させることで前記ビークル本体の水深を所定の位置に制御する駆動調節部と、前記スクリュープロペラにより生じる下向きの水流を偏向させることで前記ビークル本体を水平方向に移動させる水流偏向部と、を備えることを特徴とする。
本発明の実施形態に係る水中移動ビークルは、重量が水中で生じる浮力よりも小さくなるように予め設定されたビークル本体と、スクリュープロペラを駆動させることで下向きの推力を発生させる推力部と、前記スクリュープロペラの駆動を調節し、前記重量と前記浮力の差分相当の前記下向きの推力を発生させることで前記ビークル本体の水深を所定の位置に制御する駆動調節部と、前記スクリュープロペラにより生じる上向きの水流を偏向させることで前記ビークル本体を水平方向に移動させる水流偏向部と、を備えることを特徴とする。
本発明の実施形態により、ビークルの運動性能を向上させ、かつビークルの位置を安定的に保つことができる水中移動ビークルが提供される。
(第1実施形態)
以下、本実施形態を添付図面に基づいて説明する。まず、第1実施形態の水中移動ビークルについて図1から図11を用いて説明する。なお、図2および図3の紙面右方側を水中移動ビークル1の前方側(正面側)として以下に説明する。
以下、本実施形態を添付図面に基づいて説明する。まず、第1実施形態の水中移動ビークルについて図1から図11を用いて説明する。なお、図2および図3の紙面右方側を水中移動ビークル1の前方側(正面側)として以下に説明する。
図1の符号1は、第1実施形態の水中移動ビークルである。この水中移動ビークル1は、原子炉圧力容器2の点検や調査などを行う。本実施形態では、原子力発電プラントの一例である沸騰水型原子炉(BWR)の原子炉圧力容器2の点検に水中移動ビークル1を用いているが、加圧水型原子炉(PWR)や、その他のタイプの原子炉の点検に水中移動ビークル1を用いても良い。
図1に示すように、原子炉圧力容器2の内部には、炉心を構成する燃料集合体(図示略)を囲む炉心シュラウド3や、燃料集合体を支持する炉心支持部4や、原子炉圧力容器2の内部で水流を発生させるためのジェットポンプ5などが収容されている。なお、燃料集合体は、原子炉圧力容器2の点検などを行う前に、原子炉圧力容器2の内部から取り出される。また、原子炉圧力容器2の下部には、核燃料の連鎖反応を制御する制御棒(図示略)を案内する制御棒案内管6や、制御棒を駆動する制御棒駆動機構7などが収容されている。
原子炉圧力容器2の点検などを行う際には、原子炉圧力容器2の上部の蓋(図示略)が取り外され、燃料集合体などを核燃料プールに移動させる。そして、原子炉圧力容器2の内部が水で満された状態で、水中移動ビークル1を潜水させる。なお、水中移動ビークル1は、制御棒駆動機構7のハウジングの溶接部などの原子炉圧力容器2の炉底部の構造物(目的物)の撮影(目視検査)を行うことができる。
本実施形態では、原子炉圧力容器2の上方位置に、ガントリークレーンなどで構成される地上支持装置8(図10参照)が設けられる。この地上支持装置8が、水中移動ビークル1を支持する水中支持装置9をケーブル10で吊り下げる。そして、地上支持装置8は、ケーブル10を送り出して水中支持装置9を水中に降下させた後、この水中支持装置9から水中移動ビークル1を発進させる。
また、水中支持装置9は、縦長の円筒形状を成す装置であり、その内部に水中移動ビークル1を収容することができる。また、水中支持装置9の底面には、開口部が設けられている。水中支持装置9を水中に沈めた後に、その底面の開口から水中移動ビークル1を送り出す。なお、水中支持装置9と水中移動ビークル1は、ケーブル11により接続されている。さらに、点検の終了後には、水中支持装置9がケーブル11を巻き取って水中移動ビークル1を収容する。そして、水中移動ビークル1は、水中支持装置9に収容された状態で、地上支持装置8により引き上げられる。
本実施形態の水中移動ビークル1は、遠隔操作が可能な装置である。この水中移動ビークル1を操作する操作者は、地上に設けられた遠隔操作用PC12(図10参照)を用いて操作を行う。なお、遠隔操作用PC12から送信される操作信号は、ケーブル10,11を介して水中移動ビークル1に伝達される。また、水中移動ビークル1を用いて取得した画像信号などは、ケーブル10,11を介して遠隔操作用PC12に伝達される。また、水中移動ビークル1は、遠隔操作用PC12から送信される操作信号や、各種センサの検出信号に基づいて、水中移動ビークル1を制御する制御部13(図10参照)を備える。
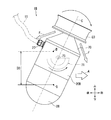
図2に示すように、水中移動ビークル1は、縦長の円筒形状を成す筐体20を有する。また、筐体20は、合成樹脂などの材質で形成され、その内部に各種機器を収容する密閉空間を有する。なお、筐体20は、金属などの材質で形成されても良いし、一部分を金属材質とし、他の部分を合成樹脂で形成しても良い。
さらに、筐体20の上部には、スクリュープロペラ21が配置される。第1実施形態では、スクリュープロペラ21を駆動させることで、下向きの水流Fが生じ、水中移動ビークル1に対して上向きの推力、つまり水中移動ビークル1を上昇させる推力を発生させる。
第1実施形態の水中移動ビークル1(ビークル本体)は、その重量が水中で生じる浮力よりも大きくなるように予め設定されている。そして、スクリュープロペラ21の駆動を調節し、重量と浮力の差分相当の上向きの推力を発生させることで水中移動ビークル1の水深を一定に保つことができる。すなわち、水中移動ビークル1は、水中でホバリングを行うことができる。また、スクリュープロペラ21の回転数を増大させると、水中移動ビークル1が上昇される。一方、スクリュープロペラ21の回転数を低減させると、水中移動ビークル1が降下される。
なお、第1実施形態の水中移動ビークル1は、上向きの推力、つまり1方向にのみ推力を発生させるスクリュープロペラ21(メインスラスタ)が設けられ、それ以外の方向、例えば、前後方向や左右方向に推力を発生させるためのスクリュープロペラ(サブスラスタ)を有していない。第1実施形態の水中移動ビークル1において、前後方向や左右方向に推力を発生させるときには、ガイドベーン22を可動させる。
第1実施形態では、4枚のガイドベーン22がスクリュープロペラ21の直下に設けられる。これらのガイドベーン22の向きを変えることで、スクリュープロペラ21により生じる下向きの水流Fを偏向させる。例えば、スクリュープロペラ21により生じる下向きの水流Fを、前後左右のいずれかの方向に偏向させると、この偏向された方向と逆方向Aに、水中移動ビークル1を移動させることができる(図3参照)。
また、筐体20の上部には、スクリュープロペラ21の周囲を囲むコルトノズル23が設けられる。なお、コルトノズル23は、筐体20の上部に固定された円筒形状を成す装置である。このコルトノズル23は、スクリュープロペラ21の回転によって生じる水流Fによって揚力を生じさせる。この揚力を得ることで、スクリュープロペラ21で発生させる推力を増大させることができる。また、コルトノズル23は、スクリュープロペラ21が障害物と接触されることを防いで、スクリュープロペラ21を保護することができる。
図5は、スクリュープロペラ21の斜視図である。なお、図5では、理解を助けるためにコルトノズル23などの構成を省略して図示している。この図5に示すように、スクリュープロペラ21は、筐体20の上端部に設けられる。さらに、スクリュープロペラ21は、その回転軸24が垂直方向を向いている。この回転軸24を中心に3枚のブレード25が設けられて、1組のスクリュープロペラ21が構成される。
本実施形態のスクリュープロペラ21は、2組のスクリュープロペラ21が同軸に配置され、互いに逆方向に回転させる2重反転プロペラ26となっている。例えば、上方のスクリュープロペラ21は、平面視で時計回りに回転し、下方のスクリュープロペラ21は、平面視で反時計回りに回転する。この2重反転プロペラ26とすることで、各スクリュープロペラ21が水から受ける反力(トルク)を打ち消すことができるとともに、回転エネルギを回収し、推進器効率を向上させることができる。さらに、各組のスクリュープロペラ21が発生させる水流Fが渦状に広がることを抑制し、直進性を有する水流Fを発生させることができる。
本実施形態では、大きな回転直径を有するスクリュープロペラ21を用いることができる。そのため、大きな推力を発生させることができる。なお、コルトノズル23の直径は、筐体20の直径とほぼ同一寸法となっている。よって、スクリュープロペラの配置の制約がある原子炉圧力容器2の幅の狭い内部環境においてもスクリュープロペラを水中移動ビークルの上下方向に配置することによって水平方向において水中移動ビークルを小型化することができる。
なお、本実施形態では、スクリュープロペラ21の直径を筐体20の直径とほぼ同等にすることで、狭い場所であっても水中移動ビークル1を進行できるようにしている。また、進行対象となる空間が充分広い場合には、スクリュープロペラ21の直径を筐体20の直径よりも大きくしても良い。
本実施形態では、水中移動ビークル1を小型にしても、大型のスクリュープロペラ21を搭載できるので、大きな推力を生み出すことができる。また、水中移動ビークル1の周囲で生じている水の流れに対して相対的に大きな推力を得ることができ、水中移動ビークル1の位置を安定的に保つことができる。
図2に示すように、筐体20の外周面において、水中移動ビークル1の後面側には、ケーブル11が接続されるケーブル接続部27が設けられている。また、筐体20の下部には、半球形状を成す窓部28が設けられる。この窓部28は、アクリル樹脂またはガラスなどの透明な材質で形成され、かつ所定の水圧に耐えられるように形成される。なお、水中移動ビークル1の内部は、窓部28および筐体20によって密閉された空間となっている。この水中移動ビークル1が水中に潜り込むと、水中移動ビークルが水を押しのけることで浮力が発生する。
図4に示すように、筐体20の内部の下方側には、スクリュープロペラ21を回転駆動させるプロペラ駆動部30が収容される。また、プロペラ駆動部30の動力をスクリュープロペラ21に伝達するための駆動シャフト31が設けられる。なお、詳細な図示を省略するが、プロペラ駆動部30は、2組のスクリュープロペラ21をそれぞれ駆動させるために2個の駆動モータを有している。また、駆動シャフト31は、内部に空洞を有する中空軸と、この中空軸の空洞に配置される中実軸とを有する。そして、中空軸および中実軸によって、各スクリュープロペラ21に各駆動モータの動力を伝達するようにしている。なお、2重反転プロペラ26とプロペラ駆動部30とで推力部32が構成される(図10参照)。
また、筐体20の内部の上部側には、4枚のガイドベーン22を駆動するために、4個のガイドベーン駆動部33が収容される。なお、4枚のガイドベーン22と4個のガイドベーン駆動部33とで第1実施形態の水流偏向部34が構成される(図10参照)。
さらに、筐体20の内部の下方側には、水中の目的物に対して照明光Lを照射する照明装置35と、この目的物を撮影する撮影装置36とが設けられる。なお、撮影装置36は、窓部28を通して水中の目的物の撮影を行い、目的物の点検や調査を行うことができる。また、照明装置35は、撮影装置36に対して固定されている。さらに、撮影装置36は、上下左右に首振り動作が可能となっており、その撮影方向Sを所定の範囲で変更することができる。なお、撮影装置36などの各種装置を制御する制御部13は、筐体20の内部に収容される。
さらに、筐体20の内部の下部側には、水中移動ビークル1の重量を調節するための調節用ウエイト37が設けられている。この調節用ウエイト37は、着脱可能になっている。そして、数種類の重量の調節用ウエイト37が準備されており、水中移動ビークル1を使用する前に、調節用ウエイト37によって水中移動ビークル1の重量を調節することができる。
水中移動ビークル1の重量を調節方法の一例を説明する。例えば、所定の調節用ウエイト37を取り付けた状態の水中移動ビークル1を試験用のプールに投入する。ここで、水中移動ビークル1が沈んだ場合は、重量の軽い調節用ウエイト37に取り換える。一方、水中移動ビークル1が浮かんだ場合は、重量の重い調節用ウエイト37に取り換える。これを繰り返して、水中移動ビークル1が水中で浮遊状態(中性浮力)になるように、調節用ウエイト37で調節する。
そして、水中移動ビークル1が中性浮力になった状態で、この水中移動ビークル1を水中から引き上げて重量を測定する。この測定値が水中移動ビークル1に生じる浮力となる。そして、この測定値に重量を加算するために、特定の重量の調節用ウエイト37を水中移動ビークル1に追加して取り付ける。
仮に、水中移動ビークル1に生じる浮力が10kgである場合に、水中移動ビークル1の重量が10.5kgになるように調節用ウエイト37を追加する。つまり、水中移動ビークル1の重量が、浮力よりも5%大きくなるように調節用ウエイト37を追加する。例えば、スクリュープロペラ21(2重反転プロペラ26)を駆動することで生じる上向きの推力が、最大で1kgであるとする。この場合に、スクリュープロペラ21の推力を50%に低減したときに生じる推力が、約半分の0.5kgであるとすると、この0.5kgに相当する重量の調節用ウエイト37を追加する。
すなわち、第1実施形態の水中移動ビークル1では、スクリュープロペラ21(2重反転プロペラ26)の推力を50%にしたときに、重量と浮力の差分相当の上向きの推力を発生させることできる。この状態では、水中移動ビークル1が浮きもせず沈みもしないで、その水深を一定に保つことができる。また、スクリュープロペラ21の推力を50%よりも大きくすると、重量と浮力の差分を超える上向きの推力を発生させることできる。そのため、水中移動ビークル1を上昇させることができる。さらに、スクリュープロペラ21の推力を50%よりも小さくすると、重量と浮力の差分未満の上向きの推力を発生させることできる。そのため、水中移動ビークル1を降下させることができる。このように、スクリュープロペラ21の駆動を調節することで、水中移動ビークル1の昇降の制御ができる。
なお、第1実施形態において、スクリュープロペラ21(2重反転プロペラ26)の推力を50%よりも小さくすること、つまり、重量と浮力の差分未満の上向きの推力を発生させることには、スクリュープロペラ21の駆動(回転)を停止して、推力を0%にすること(推力を発生させないこと)が含まれる。
なお、第1実施形態では、水中移動ビークル1の重量を浮力よりも大きくしているので、水中移動ビークル1が故障して、スクリュープロペラ21の駆動が停止した場合に、水中移動ビークル1が沈降する。特に、原子炉圧力容器2の炉底部の点検中に、水中移動ビークル1が故障した場合に、不用意に浮かび上がってしまうと、原子炉圧力容器2の他の構造物の隙間に入り込んでしまうおそれがある。本実施形態では、水中移動ビークル1が故障した場合に沈むようになっているので、水中移動ビークル1の回収を容易に行うことができる。
なお、第1実施形態では、水中移動ビークル1の重量が浮力よりも5%大きくなるようにしているが、水中移動ビークル1の重量は、浮力よりも少なくとも3%大きければ良い。このようにすれば、水中移動ビークル1の水深を一定に保った状態でも、重量と浮力の差分相当の大きさのスクリュープロペラ21(2重反転プロペラ26)の推力が、水中移動ビークル1に継続的に加わるので、水中移動ビークル1の位置を安定的に保つことができる。すなわち、水中移動ビークル1には、重量と浮力の差分相当の大きさの重力で下方に引かれるとともに、同じ大きさの上向きの推力により押し上げられる。このように力が継続的に水中移動ビークル1に加わるので、その位置を安定的に保つことができる。
なお、水中移動ビークル1の重量と浮力の差分は、スクリュープロペラ21の推力に応じて適宜変更しても良い。例えば、水中移動ビークル1の重量は、浮力よりも10%大きくても良いし、20%大きくても良いし、30%大きくても良い。また、水中移動ビークル1の重量と浮力の差分は、スクリュープロペラ21の推力の50%に相当する値でなくても良い。例えば、水中移動ビークル1の重量と浮力の差分は、スクリュープロペラ21の推力の30%に相当する値でも良いし、40%に相当する値でも良いし、60%に相当する値でも良いし、70%に相当する値でも良いし、80%に相当する値でも良い。
図4に示すように、調節用ウエイト37およびプロペラ駆動部30の重量により、水中移動ビークル1の重心Gが筐体20の下方側に配置される。なお、重心Gと浮心Bは、所定距離D1離間して配置されている。本実施形態の水中移動ビークル1は、重心Gを浮心Bよりも下方に配置することでスクリュープロペラ21の回転軸24を垂直に維持する。このようにすれば、スクリュープロペラ21により生じる水流Fが偏向されても、スクリュープロペラ21の回転軸24が垂直になるように、水中移動ビークル1の姿勢を保つ復元力が働くようになるので、水中移動ビークル1を安定的に水平方向に移動させることができる。
なお、本実施例では、水中移動ビークル1の浮力を基準として、調節用ウエイト37により追加する重量を調節しているが、水中移動ビークル1の重量を基準として、調節用ウエイト37により浮力を調節しても良い。さらに、水中移動ビークル1の浮力は、その重量よりも少なくとも3%小さくしたものであっても良い。
なお、本実施形態では、水中移動ビークル1の重量と浮力の調節のために調節用ウエイト37を用いているが、その他の方法で水中移動ビークル1の重量と浮力の調節を行っても良い。例えば、着脱可能な調節用フロートを用いて水中移動ビークル1の浮力の増減を調節するようにしても良い。
図5および図7に示すように、筐体20の上部は、角錐形状(四角錐形状)に形成される。本実施形態では、右前、左前、右後、左後の四面のそれぞれに、1枚ずつガイドベーン22が配置される。これら四面がガイドベーン22の配置面40となっている。なお、配置面40は、45°の傾斜を有する平坦な面となっている。さらに、配置面40は、ガイドベーン22の揺動範囲に対応して扇型に広がった面となっている。また、垂直に延びる支持棒41が各配置面40に設けられる。そして、これらの支持棒41にガイドベーン22が揺動自在に支持される。
図6に示すように、ガイドベーン22は、側面視で三角形状を成す板部材である。また、ガイドベーン22は、コルトノズル23と配置面40との間に設けられる。なお、スクリュープロペラ21が発生させた水流Fは、ガイドベーン22と配置面40とに案内され、筐体20の外周面に沿って下方に流れる(図4参照)。
また、筐体20の外部のガイドベーン22と、筐体20の内部のガイドベーン駆動部33とは、配置面40を形成する壁部42を介して隔てられている。なお、壁部42を構成する材質は、合成樹脂などの磁力を透過する材質で構成される。また、磁力を透過する材質であれば、アルミニウムなどの金属材質で壁部42を構成しても良い。
さらに、ガイドベーン22の近傍には、第1磁石43を有する第1磁力連係部44が設けられる。また、ガイドベーン駆動部33には、壁部42を介して第1磁力連係部44に対応する位置に、第2磁石45を有する第2磁力連係部46が設けられる。なお、第2磁力連係部46は、揺動可能に設けられた揺動棒47に接続されている。この揺動棒47は、ソレノイド部48に接続されている。そして、ソレノイド部48の駆動力により揺動棒47の揺動動作が制御される。これら第2磁力連係部46と揺動棒47とソレノイド部48とでガイドベーン駆動部33が構成される。
なお、第1磁力連係部44と第2磁力連係部46とは、磁力によって連係されており、第2磁力連係部46が揺動移動することによって、第1磁力連係部44が配置面40に沿ってスライド移動する。そして、第1磁力連係部44の移動によって、ガイドベーン22が支持棒41を軸として揺動される。
このように、ガイドベーン駆動部33が筐体20の内部に配置され、筐体20の壁部42を透過する磁力によってガイドベーン駆動部33とガイドベーン22とが連係されるので、筐体20により水の浸入を防止しつつ、ガイドベーン22を駆動することができる。
なお、本実施形態では、第1磁力連係部44および第2磁力連係部46が、第1磁石43および第2磁石45を有する構成となっているが、少なくとも一方が着磁可能な金属(磁性体)であれば良い。また、電磁石(ソレノイドコイルなどを含む)を用いて、第1磁力連係部44と第2磁力連係部46とを連係させても良い。
図2および図7に示すように、水中移動ビークル1を水平方向に移動させず、その場に停止させる場合には、平面視で、4枚のガイドベーン22が放射状に延びる向きとなる。この場合に、スクリュープロペラ21が発生させた水流Fは、平面視で放射状に流れるので、水中移動ビークル1が前後左右のいずれの方向にも移動せず、その場に留まることができる。
図3および図8に示すように、水中移動ビークル1を前進させる場合には、平面視で、左側2枚のガイドベーン22を反時計回りに揺動させるとともに、右側2枚のガイドベーン22を時計回りに揺動させる。この場合に、スクリュープロペラ21が発生させた水流Fは、後方側に多量に流れるので、水中移動ビークル1が逆方向A(前方向)に移動される。なお、一部の水流Fは、前方側にも流れるので、水中移動ビークル1の垂直軸を傾けずに前進させることができる。
なお、水中移動ビークル1を後退させる場合には、平面視で、左側2枚のガイドベーン22を時計回りに揺動させるとともに、右側2枚のガイドベーン22を反時計回りに揺動させる。また、水中移動ビークル1を左方に横移動させる場合には、平面視で、前側2枚のガイドベーン22を時計回りに揺動させるとともに、後側2枚のガイドベーン22を反時計回りに揺動させる。さらに、水中移動ビークル1を右方に横移動させる場合には、平面視で、前側2枚のガイドベーン22を反時計回りに揺動させるとともに、後側2枚のガイドベーン22を時計回りに揺動させる。
図9に示すように、水中移動ビークル1を平面視で時計回りに旋回(方向転換)させる場合には、4枚のガイドベーン22を反時計回りに揺動させる。この場合に、スクリュープロペラ21が発生させた水流Fは、反時計回りに流れるので、水中移動ビークル1が平面視で時計回りに旋回される。
なお、水中移動ビークル1を平面視で反時計回りに旋回させる場合には、4枚のガイドベーン22を時計回りに揺動させる。この場合に、スクリュープロペラ21が発生させた水流Fは、時計回りに流れるので、水中移動ビークル1が平面視で反時計回りに旋回される。
このように、スクリュープロペラ21により生じる水流Fをガイドベーン22により偏向させることで、水中移動ビークル1の水平方向の移動や旋回を制御できる。また、1方向(上向き)にのみ推力を発生させるスクリュープロペラ21を設けることで、水中移動ビークル1が前後左右のいずれの方向にも移動することができる。なお、ガイドベーン22の制御は、遠隔操作用PC12から送信される操作信号に基づいて、制御部13が有する駆動調節部50が実行する(図10参照)。
なお、本実施形態では、4枚のガイドベーン22を用いて水中移動ビークル1の水平方向の移動や旋回を制御しているが、少なくとも2枚のガイドベーン22があれば良い。例えば、平面視で筐体20の中心を挟んで対向配置された2枚のガイドベーン22を、それぞれ駆動することで、水中移動ビークル1の水平方向の移動(前後移動)や旋回を制御することができる。また、平面視で筐体20の中心から放射状に配置された3枚のガイドベーン22を用いて、水中移動ビークル1の水平方向の移動や旋回を制御しても良い。
なお、本実施形態では、水中移動ビークル1を旋回させる場合にガイドベーン22を用いているが、その他の方法で水中移動ビークル1を旋回させても良い。例えば、図5に示す2重反転プロペラ26において、上下のスクリュープロペラ21の回転数を互いに異ならせることで、スクリュープロペラ21の軸周りに水中移動ビークル1を旋回させることができる。
まず、上方のスクリュープロペラ21が平面視で時計回りに回転し、下方のスクリュープロペラ21が平面視で反時計回りに回転とする。ここで、水中移動ビークル1を平面視で時計回りに旋回させる場合には、上方のスクリュープロペラ21の回転数を低減させ、下方のスクリュープロペラ21の回転数を増大させる。すると、下方のスクリュープロペラ21の反力により、水中移動ビークル1を平面視で時計回りに旋回させることができる。
また、水中移動ビークル1を平面視で反時計回りに旋回させる場合には、上方のスクリュープロペラ21の回転数を増大させ、下方のスクリュープロペラ21の回転数を低減させる。すると、下方のスクリュープロペラ21の反力により、水中移動ビークル1を平面視で反時計回りに旋回させることができる。このように、スクリュープロペラ21の回転数の制御により水中移動ビークル1の旋回を行うことができる。
図10は、本実施形態のシステム構成を示すブロック図である。本実施形態の原子炉調査装置は、地上支持装置8と水中支持装置9と水中移動ビークル1とを備える。さらに、操作者が水中移動ビークル1などを遠隔操作するための遠隔操作用PC12が設けられている。この遠隔操作用PC12は、地上支持装置8に通信線51を介して接続される。
また、地上支持装置8は、水中支持装置9に接続されたケーブル10の送り出し量(または巻き取り量)を制御するための支持装置用ケーブル送出制御部52と、ケーブル10を送り出す(または巻き取る)支持装置用ケーブル送出装置53と、遠隔操作用PC12と通信を行うための通信部54と、を備える。なお、地上支持装置8には、各種装置類に電力を供給するための電源55が接続されている。この電源55は、屋外に設けられた発電機などにより構成され、電力供給線56を介して地上支持装置8に接続される。なお、地上支持装置8と水中支持装置9とを繋ぐケーブル10は、水中支持装置9に対して電力を供給するための電力供給線57と、操作信号などを転送するための通信線58と、を備える。
また、水中支持装置9は、水中移動ビークル1に接続されたケーブル11の送り出し量(または巻き取り量)を制御するためのビークル用ケーブル送出制御部59と、ケーブル11を送り出す(または巻き取る)ビークル用ケーブル送出装置60と、遠隔操作用PC12と通信を行うための通信部61と、を備える。なお、水中支持装置9と水中移動ビークル1とを繋ぐケーブル11は、水中移動ビークル1に対して電力を供給するための電力供給線62と、操作信号などを転送するための通信線63と、を備える。
また、水中移動ビークル1は、前述した制御部13と推力部32と水流偏向部34と照明装置35と撮影装置36とを備える。さらに、水中移動ビークル1は、水中移動ビークル1の水深を検知する水深センサ64と、水中移動ビークル1の移動方向と移動速度を検知する加速度センサ65と、水中移動ビークル1の向きを検知するジャイロスコープ66と、遠隔操作用PC12と通信を行うための通信部67と、を備える。これらの装置は、制御部13に接続されて制御される。なお、制御部13は、水深センサ64と加速度センサ65とジャイロスコープ66とにより、水中移動ビークル1の現在位置を特定することができる。
なお、制御部13は、ガイドベーン22を制御する駆動調節部50を備える。また、推力部32は、2重反転プロペラ26とプロペラ駆動部30とを備える。さらに、水流偏向部34は、ガイドベーン22とガイドベーン駆動部33とを備える。
なお、制御部13は、プロセッサやメモリなどのハードウエア資源を有し、CPUが各種プログラムを実行することで、ソフトウエアによる情報処理がハードウエア資源を用いて実現されるコンピュータで構成される。
また、水深センサ64は、水面から水中移動ビークル1の位置までの距離を検知するとともに、水圧を検知することもできる。なお、水中移動ビークル1に生じる浮力は、水圧により変化する。本実施形態の駆動調節部50は、スクリュープロペラ21の回転数を水深センサ64で検出した水深に対応する回転数に制御することで水中移動ビークル1の水深を一定に保つか、または、予め定められた所定の位置に移動することができる。
本実施形態の駆動調節部50は、スクリュープロペラ21の回転数と水深(水圧)とを対応付けた回転数テーブルをメモリに記憶している。例えば、水中移動ビークル1の水深を一定に保つ場合において、駆動調節部50は、回転数テーブルを参照し、水深センサ64で検知した水深に対応する回転数でスクリュープロペラ21を駆動させる。また、水中移動ビークル1が上昇や降下を行って水深が変化した場合において、駆動調節部50は、回転数テーブルに基づいてスクリュープロペラ21の回転数を変更する。このように、水深によって水中移動ビークル1に生じる浮力が変わっても、スクリュープロペラ21の回転数を適切に制御できるので、いずれの水深でも水中移動ビークル1の位置を安定的に保つことができる。
次に、第1実施形態の水中移動ビークル1の制御部13(駆動調節部50)が実行する水中移動処理について図11を用いて説明する。なお、フローチャートの各ステップの説明にて、例えば「ステップS11」と記載する箇所を「S11」と略記する。
第1実施形態では、前述したように、水中移動ビークル1の重量が水中で生じる浮力よりも大きくなるように予め設定する(設定ステップ)。そして、水中移動ビークル1が水中に投入されると、制御部13は、スクリュープロペラ21を駆動させることで、水中移動ビークル1の重量と浮力の差分相当の上向きの推力を発生させる(推力ステップ)。
図11に示すように、まず、制御部13は、遠隔操作用PCから操作を受け付けたか否か、つまり、操作信号を受信したか否かを判定する(S11)。ここで、遠隔操作用PCから操作を受け付けていない場合は、スクリュープロペラ21の回転数を一定に保つことによって、水中移動ビークル1の重量と浮力の差分相当の上向きの推力を維持し、水中移動ビークル1の水深を一定に保つ制御を行う(S16:駆動調節ステップ)。そして、水中移動処理を終了する。一方、遠隔操作用PCから操作を受け付けた場合は、S12に進む。
S12にて制御部13は、受け付けた操作が上昇操作であるか否かを判定する。ここで、受け付けた操作が上昇操作である場合は、スクリュープロペラ21の回転数を増大させることによって、水中移動ビークル1の重量と浮力の差分を超える上向きの推力を発生させ、水中移動ビークル1を上昇させる制御を行う(S17)。そして、水中移動処理を終了する。一方、受け付けた操作が上昇操作でない場合は、S13に進む。
S13にて制御部13は、受け付けた操作が降下操作であるか否かを判定する。ここで、受け付けた操作が降下操作である場合は、スクリュープロペラ21の回転数を低減させることによって、水中移動ビークル1の重量と浮力の差分未満の上向きの推力を発生させ、水中移動ビークル1を降下させる制御を行う(S18)。そして、水中移動処理を終了する。一方、受け付けた操作が降下操作でない場合は、S14に進む。
S14にて制御部13は、受け付けた操作が水平移動操作か否か、つまり、水中移動ビークル1を前後左右のいずれかの方向に移動させる操作であるか否かを判定する。ここで、受け付けた操作が水平移動操作である場合は、対応するガイドベーン22を動作させる(S19:水流偏向ステップ)。例えば、水中移動ビークル1を前進させる場合には、平面視で、左側2枚のガイドベーン22を反時計回りに揺動させるとともに、右側2枚のガイドベーン22を時計回りに揺動させる(図8参照)。そして、水中移動処理を終了する。なお、水平移動操作の操作信号の受信が継続している場合には、ガイドベーン22の動作が継続される。一方、受け付けた操作が水平移動操作でない場合は、S15に進む。
S15にて制御部13は、受け付けた操作が方向転換操作か否か、つまり、水中移動ビークル1を旋回させる操作であるか否かを判定する。ここで、受け付けた操作が方向転換操作である場合は、各ガイドベーン22を動作させる(S20)。例えば、水中移動ビークル1を平面視で時計回りに旋回(方向転換)させる場合には、4枚のガイドベーン22を反時計回りに揺動させる(図9参照)。そして、水中移動処理を終了する。なお、方向転換操作の操作信号の受信が継続している場合には、ガイドベーン22の動作が継続される。一方、受け付けた操作が方向転換操作でない場合は、水中移動処理を終了する。
(第2実施形態)
次に、第2実施形態の水中移動ビークル1Aについて図12から図15を用いて説明する。なお、前述した実施形態に示される構成部分と同一構成部分については同一符号を付して重複する説明を省略する。なお、図12および図13の紙面右方側を水中移動ビークル1Aの前方側(正面側)として以下に説明する。
次に、第2実施形態の水中移動ビークル1Aについて図12から図15を用いて説明する。なお、前述した実施形態に示される構成部分と同一構成部分については同一符号を付して重複する説明を省略する。なお、図12および図13の紙面右方側を水中移動ビークル1Aの前方側(正面側)として以下に説明する。
図12に示すように、第2実施形態の水中移動ビークル1Aは、前述の第1実施形態の水中移動ビークル1の上下を反転させた構成となっている。すなわち、スクリュープロペラ21が筐体20の下部に配置され、窓部28が筐体20の上部に配置される。この第2実施形態の水中移動ビークル1A(ビークル本体)は、その重量が水中で生じる浮力よりも小さくなるように予め設定されている。そして、スクリュープロペラ21の駆動を調節し、重量と浮力の差分相当の下向きの推力を発生させることで水中移動ビークル1Aの水深を一定に保つことができる。また、スクリュープロペラ21の回転数を低減させると、水中移動ビークル1が上昇される。一方、スクリュープロペラ21の回転数を増大させると、水中移動ビークル1が降下される。
第2実施形態では、4枚のガイドベーン22がスクリュープロペラ21の直上に設けられる。これらのガイドベーン22の向きを変えることで、スクリュープロペラ21により生じる上向きの水流Fを偏向させる。例えば、スクリュープロペラ21により生じる上向きの水流Fを、前後左右のいずれかの方向に偏向させると、この偏向された方向と逆方向Aに、水中移動ビークル1Aを移動させることができる(図13参照)。
図14に示すように、第2実施形態では、プロペラ駆動部30や調節用ウエイト37がスクリュープロペラ21に近接した位置、つまり筐体20の下方側に設けられている。そして、調節用ウエイト37およびプロペラ駆動部30の重量により、水中移動ビークル1Aの重心Gが筐体20の下方側に配置される。なお、重心Gと浮心Bは、所定距離D1離間して配置されている。
第2実施形態では、水中移動ビークル1Aに生じる浮力が10kgである場合に、水中移動ビークル1Aの重量が9.5kgになるように調節用ウエイト37を削減する。つまり、水中移動ビークル1の重量が、浮力よりも5%小さくなるように調節用ウエイト37を削減する。例えば、スクリュープロペラ21(2重反転プロペラ26)を駆動することで生じる下向きの推力が、最大で1kgであるとする。この場合に、スクリュープロペラ21の推力を50%に低減したときに生じる推力が、約半分の0.5kgであるとすると、この0.5kgに相当する重量の調節用ウエイト37を削減する。
すなわち、第2実施形態の水中移動ビークル1Aでは、スクリュープロペラ21(2重反転プロペラ26)の推力を50%にしたときに、重量と浮力の差分相当の下向きの推力を発生させることできる。この状態では、水中移動ビークル1Aが浮きもせず沈みもしないで、その水深を一定に保つことができる。また、スクリュープロペラ21の推力を50%よりも大きくすると、重量と浮力の差分を超える下向きの推力を発生させることできる。そのため、水中移動ビークル1Aを降下させることができる。さらに、スクリュープロペラ21の推力を50%よりも小さくすると、重量と浮力の差分未満の下向きの推力を発生させることできる。そのため、水中移動ビークル1Aを上昇させることができる。このように、スクリュープロペラ21の駆動を調節することで、水中移動ビークル1Aの昇降の制御ができる。
なお、第2実施形態において、スクリュープロペラ21(2重反転プロペラ26)の推力を50%よりも小さくすること、つまり、重量と浮力の差分未満の下向きの推力を発生させることには、スクリュープロペラ21の駆動(回転)を停止して、推力を0%にすること(推力を発生させないこと)が含まれる。
なお、第2実施形態では、水中移動ビークル1の重量を浮力よりも小さくしているので、水中移動ビークル1Aが故障して、スクリュープロペラ21の駆動が停止した場合に、水中移動ビークル1Aが上昇される。そのため、水中移動ビークル1Aが故障した場合に、浮かび上がってきた水中移動ビークル1Aを容易に回収することができる。
なお、第2実施形態では、水中移動ビークル1Aの重量が浮力よりも5%小さくなるようにしているが、水中移動ビークル1Aの重量は、浮力よりも少なくとも3%小さければ良い。このようにすれば、水中移動ビークル1Aの水深を一定に保った状態でも、重量と浮力の差分相当の大きさのスクリュープロペラ21(2重反転プロペラ26)の推力が、水中移動ビークル1Aに継続的に加わるので、水中移動ビークル1Aの位置を安定的に保つことができる。すなわち、水中移動ビークル1Aには、重量と浮力の差分相当の大きさの浮力で上方に引かれるとともに、同じ大きさの下向きの推力により押し下げられる。このように力が継続的に水中移動ビークル1Aに加わるので、その位置を安定的に保つことができる。
なお、水中移動ビークル1Aの重量と浮力の差分は、スクリュープロペラ21の推力に応じて適宜変更しても良い。例えば、水中移動ビークル1Aの重量は、浮力よりも10%小さくても良いし、20%小さくても良いし、30%小さくても良い。また、水中移動ビークル1Aの重量と浮力の差分は、スクリュープロペラ21の推力の50%に相当する値でなくても良い。例えば、水中移動ビークル1の重量と浮力の差分は、スクリュープロペラ21の推力の30%に相当する値でも良いし、40%に相当する値でも良いし、60%に相当する値でも良いし、70%に相当する値でも良いし、80%に相当する値でも良い。
次に、第2実施形態の水中移動ビークル1Aの制御部13(駆動調節部50)が実行する水中移動処理について図15を用いて説明する。なお、第2実施形態の水中移動処理は、S16A、S17A、S18Aのステップのみが、前述した第1実施形態の水中移動処理(図11参照)と異なり、その他のステップは、前述した第1実施形態の水中移動処理と同様のステップである。
第2実施形態では、前述したように、水中移動ビークル1Aの重量が水中で生じる浮力よりも小さくなるように予め設定する(設定ステップ)。そして、水中移動ビークル1Aが水中に投入されると、制御部13は、スクリュープロペラ21を駆動させることで、水中移動ビークル1Aの重量と浮力の差分相当の下向きの推力を発生させる(推力ステップ)。
図15に示すように、まず、制御部13は、遠隔操作用PCから操作を受け付けたか否か、つまり、操作信号を受信したか否かを判定する(S11)。ここで、遠隔操作用PCから操作を受け付けていない場合は、スクリュープロペラ21の回転数を一定に保つことによって、水中移動ビークル1Aの重量と浮力の差分相当の下向きの推力を維持し、水中移動ビークル1Aの水深を一定に保つ制御を行う(S16A:駆動調節ステップ)。そして、水中移動処理を終了する。一方、遠隔操作用PCから操作を受け付けた場合は、S12に進む。
S12にて制御部13は、受け付けた操作が上昇操作であるか否かを判定する。ここで、受け付けた操作が上昇操作である場合は、スクリュープロペラ21の回転数を低減させることによって、水中移動ビークル1Aの重量と浮力の差分未満の下向きの推力を発生させ、水中移動ビークル1Aを上昇させる制御を行う(S17A)。そして、水中移動処理を終了する。一方、受け付けた操作が上昇操作でない場合は、S13に進む。
S13にて制御部13は、受け付けた操作が降下操作であるか否かを判定する。ここで、受け付けた操作が降下操作である場合は、スクリュープロペラ21の回転数を増大させることによって、水中移動ビークル1Aの重量と浮力の差分を超える下向きの推力を発生させ、水中移動ビークル1Aを降下させる制御を行う(S18A)。そして、水中移動処理を終了する。一方、受け付けた操作が降下操作でない場合は、S14に進む。以降のステップは、前述した第1実施形態の水中移動処理と同様のステップである。
(第3実施形態)
次に、第3実施形態の水中移動ビークル1Bについて図16から図19を用いて説明する。なお、前述した実施形態に示される構成部分と同一構成部分については同一符号を付して重複する説明を省略する。なお、図16および図17の紙面右方側を水中移動ビークル1Bの前方側(正面側)として以下に説明する。
次に、第3実施形態の水中移動ビークル1Bについて図16から図19を用いて説明する。なお、前述した実施形態に示される構成部分と同一構成部分については同一符号を付して重複する説明を省略する。なお、図16および図17の紙面右方側を水中移動ビークル1Bの前方側(正面側)として以下に説明する。
図16に示すように、第3実施形態の水中移動ビークル1Bの筐体20Bは、第1実施形態の筐体20よりも上下方向に短くなっている。なお、水中移動ビークル1Bの重心Gと浮心Bとの間の距離D2は、第1実施形態の重心Gと浮心Bとの間の距離D1よりも短くなっている。そのため、第3実施形態の水中移動ビークル1Bの筐体20Bは、第1実施形態の水中移動ビークル1の筐体20と比較して傾き易くなっている。
また、筐体20Bの上部には、コルトノズル23(スクリュープロペラ21)が配置される。第3実施形態では、スクリュープロペラ21を駆動させることで、下向きの水流Fが生じ、水中移動ビークル1Bに対して上向きの推力、つまり水中移動ビークル1Bを上昇させる推力を発生させる。
第3実施形態の水中移動ビークル1B(ビークル本体)は、その重量が水中で生じる浮力よりも大きくなるように予め設定されている。そして、スクリュープロペラ21の駆動を調節し、重量と浮力の差分相当の上向きの推力を発生させることで水中移動ビークル1Bの水深を一定に保つことができる。また、スクリュープロペラ21の回転数を増大させると、水中移動ビークル1Bが上昇される。一方、スクリュープロペラ21の回転数を低減させると、水中移動ビークル1Bが降下される。
また、第3実施形態の水中移動ビークル1Bでは、第1実施形態のガイドベーン22が設けられていない。この第3実施形態の筐体20Bの上部は、円錐形状に形成された円錐部70となっている。この円錐部70は、コルトノズル23(スクリュープロペラ21)の直下に設けられ、スクリュープロペラ21が発生させた下向きの水流Fを下方に案内する。
なお、第3実施形態では、2重反転プロペラ26(図5参照)の上下のスクリュープロペラ21の回転数を互いに異ならせることで、スクリュープロペラ21の軸周りに水中移動ビークル1Bを旋回させるようにしている。
例えば、前述の図5に示すように、上方のスクリュープロペラ21が平面視で時計回りに回転し、下方のスクリュープロペラ21が平面視で反時計回りに回転とする。ここで、水中移動ビークル1を平面視で時計回りに旋回させる場合には、上方のスクリュープロペラ21の回転数を低減させ、下方のスクリュープロペラ21の回転数を増大させる。すると、下方のスクリュープロペラ21の反力により、水中移動ビークル1Bを平面視で時計回りに旋回させることができる。
また、水中移動ビークル1Bを平面視で反時計回りに旋回させる場合には、上方のスクリュープロペラ21の回転数を増大させ、下方のスクリュープロペラ21の回転数を低減させる。すると、下方のスクリュープロペラ21の反力により、水中移動ビークル1Bを平面視で反時計回りに旋回させることができる。このように、スクリュープロペラ21の回転数の制御により水中移動ビークル1Bの旋回を行うことができる。
図17に示すように、第3実施形態の水中移動ビークル1Bにおいて、前後方向に推力を発生させるときには、水中移動ビークル1Bの中心軸Cを傾ける。この水中移動ビークル1Bの筐体20Bの内部には、水中移動ビークル1Bの重心Gの位置を変化させるためのバランスウエイト71が設けられている。また、このバランスウエイト71を駆動させるバランスウエイト駆動部72が設けられている。なお、バランスウエイト71とバランスウエイト駆動部72とで第3実施形態の水流偏向部34Bが構成される(図18参照)。
また、バランスウエイト71は、側面視で半円形状を成す部材であり、揺動軸73を中心として前後方向に揺動可能となっている。なお、水中移動ビークル1Bを前進させる場合には、バランスウエイト71を駆動して前方に揺動させると、水中移動ビークル1Bの重心Gの位置が中心軸Cよりも前方に移動する。このようにすると、水中移動ビークル1Bの中心軸Cが前方に傾斜される。つまり、スクリュープロペラ21が前方側に向くように傾けられる。この場合に、スクリュープロペラ21が発生させた水流Fは、後方側に多量に流れるので、水中移動ビークル1Bが逆方向A(前方向)に移動される。なお、一部の水流Fは、前方側にも流れるので、水中移動ビークル1Bがバランスを崩してしまうことがない。
また、水中移動ビークル1Bを後退させる場合には、バランスウエイト71を駆動して後方に揺動させると、水中移動ビークル1Bの重心Gの位置が中心軸Cよりも後方に移動する。このようにすると、水中移動ビークル1Bの中心軸Cが後方に傾斜される。つまり、スクリュープロペラ21が後方側に向くように傾けられる。この場合に、スクリュープロペラ21が発生させた水流Fは、前方側に多量に流れるので、水中移動ビークル1Bが逆方向(後方向)に移動される。なお、一部の水流Fは、後方側にも流れるので、水中移動ビークル1Bがバランスを崩してしまうことがない。
このように、第3実施形態では、水流偏向部34Bが、水中移動ビークル1Bの姿勢を保つバランスウエイト71と、バランスウエイト71を動かすことで水中移動ビークル1Bの姿勢を傾けて水流Fを偏向させるバランスウエイト駆動部72と、を備えることで、スクリュープロペラ21により生じる水流Fを水中移動ビークル1Bの姿勢を傾けることにより偏向させることができる。また、ガイドベーンのように、外部に露出する動作部が減るため、破損リスクを低減させることができる。
また、第3実施形態では、前後方向(1軸方向)に揺動可能されるバランスウエイト71のみが設けられているので、水中移動ビークル1Bの前進と後退が可能であるが、左方向および右方向の横移動ができないようになっている。なお、水中移動ビークル1Bを用いて左方向または右方向に移動したい場合には、移動したい方向に水中移動ビークル1Bを旋回させて、その後に前進する。
次に、第3実施形態の水中移動ビークル1Bの制御部13(駆動調節部50)が実行する水中移動処理について図18を用いて説明する。なお、第3実施形態の水中移動処理は、S14B、S19B、S20Bのステップのみが、前述した第1実施形態の水中移動処理(図11参照)と異なり、その他のステップは、前述した第1実施形態の水中移動処理と同様のステップである。
図18に示すように、S14Bにて制御部13は、受け付けた操作が前後移動操作か否か、つまり、水中移動ビークル1Bを前後のいずれかの方向に移動させる操作であるか否かを判定する。ここで、受け付けた操作が前後移動操作である場合は、バランスウエイト71を前方または後方に揺動させる(S19B:水流偏向ステップ)。例えば、水中移動ビークル1Bを前進させる場合には、バランスウエイト71を前方側に揺動させて、水中移動ビークル1Bをスクリュープロペラ21が前方側に向くように傾ける(図17参照)。そして、水中移動処理を終了する。なお、前後移動操作の操作信号の受信が継続している場合には、バランスウエイト71が揺動された状態が継続される。一方、受け付けた操作が前後移動操作でない場合は、S15に進む。
S15にて制御部13は、受け付けた操作が方向転換操作か否か、つまり、水中移動ビークル1Bを旋回させる操作であるか否かを判定する。ここで、受け付けた操作が方向転換操作である場合は、2重反転プロペラ26(図5参照)の上下のスクリュープロペラ21の回転数を互いに異ならせることで、スクリュープロペラ21の軸周りに水中移動ビークル1Bを旋回させる(S20B)。そして、水中移動処理を終了する。なお、方向転換操作の操作信号の受信が継続している場合には、スクリュープロペラ21の回転数を互いに異ならせた状態が継続される。一方、受け付けた操作が方向転換操作でない場合は、水中移動処理を終了する。
なお、第3実施形態では、前後方向(1軸方向)に揺動可能とされるバランスウエイト71のみが設けられているが、前後方向に揺動可能とされるバランスウエイト71の他に、左右方向に揺動可能とされるバランスウエイト71を設けるようにしても良い。つまり、揺動方向が互いに直交する2つのバランスウエイト71を設けるようにしても良い。このように、2軸方向に揺動可能なバランスウエイト71を備えることで、水中移動ビークル1Bの前進と後退、さらに左方向と右方向の4方向の水平移動が可能になる。
本実施形態に係る水中移動ビークルを第1実施形態から第3実施形態に基づいて説明したが、いずれか1の実施形態において適用された構成を他の実施形態に適用しても良いし、各実施形態において適用された構成を組み合わせても良い。
例えば、第3実施形態の水中移動ビークル1B(ビークル本体)を、第2実施形態の水中移動ビークル1Aのように上下を反転させた構成とし、その重量が水中で生じる浮力よりも小さくなるように予め設定しても良い。そして、スクリュープロペラ21の駆動を調節し、重量と浮力の差分相当の下向きの推力を発生させることで水中移動ビークル1Bの水深を一定に保つようにしても良い。さらに、前後方向に推力を発生させるときには、水中移動ビークル1Bの中心軸Cを傾けるようにしても良い。
なお、本実施形態では、原子炉圧力容器2の内部の調査のために、水中移動ビークル1を用いているが、その他の構造物の内部の調査に水中移動ビークル1を用いても良い。例えば、水道管の内部や貯水タンクなどの閉じられた構造物の内部空間の調査に水中移動ビークル1を用いても良い。また、人工構造物以外の調査に水中移動ビークル1を用いても良い。例えば、河川や池や湖や海洋の調査に水中移動ビークル1を用いても良い。さらに、本実施形態では、水中移動ビークル1にケーブル11が接続され、このケーブル11を用いて有線で操作しているが、水中移動ビークル1にケーブル11を接続せずに、無線を用いて操作しても良い。さらに、水中移動ビークル1が自律的に遊泳するものであっても良い。また、水中移動ビークル1は、操作者が搭乗して操作する潜水船であっても良い。
なお、本実施形態では、水中移動ビークル1が原子炉圧力容器2の内部を撮影することで調査を行うようにしているが、その他の機能を水中移動ビークル1が有しても良い。例えば、水中移動ビークル1にロボットアームを搭載して構造物の採取などを行うようにしても良いし、水中移動ビークル1に吸水装置を搭載して原子炉圧力容器2の内部の水の採取を行うようにしても良い。
なお、本実施形態では、2重反転プロペラ26(2個のスクリュープロペラ21)で構成される1個のメインスラスタが設けられているが、複数個のメインスラスタを設けるようにしても良い。例えば、小型の4個のメインスラスタを同じ向きに並べて、これらのメインスラスタを用いて、上向きの推力または下向きの推力を発生させても良い。
なお、第1実施形態または第3実施形態では、スクリュープロペラ21が上方から水を吸い込んで下向きの水流Fを発生させているが、筐体20の側方から水を吸い込んで筐体20の下方から下向きの水流Fを放出するようにしても良い。また、第2実施形態では、スクリュープロペラ21が下方から水を吸い込んで上向きの水流Fを発生させているが、筐体20の側方から水を吸い込んで筐体20の上方から上向きの水流Fを放出するようにしても良い。また、スクリュープロペラ21が筐体20の外部に露呈している構成でなくても良く、筐体に設けられた吸込口から吸い込んだ水を、筐体内部のダクトを介してスクリュープロペラに導いて、筐体に設けられた排出口から水流を排出して推力を発生させる構成であっても良い。
以上説明した実施形態によれば、スクリュープロペラ21の駆動を調節し、水中移動ビークル1の重量と浮力の差分相当の鉛直方向(上向きまたは下向き)の推力を発生させることで水中移動ビークル1の水深を一定に保つか、または、予め定められた所定の位置に移動させる駆動調節部50と、スクリュープロペラ21により生じる鉛直方向(上向きまたは下向き)の水流Fを偏向させることで水中移動ビークル1を水平方向に移動させる水流偏向部34を備えることにより、水中移動ビークル1の運動性能を向上させ、かつ水中移動ビークル1の位置を安定的に保つことができる。
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更、組み合わせを行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
1(1A,1B)…水中移動ビークル、2…原子炉圧力容器、3…炉心シュラウド、4…炉心支持部、5…ジェットポンプ、6…制御棒案内管、7…制御棒駆動機構、8…地上支持装置、9…水中支持装置、10…ケーブル、11…ケーブル、12…遠隔操作用PC、13…制御部、20(20B)…筐体、21…スクリュープロペラ、22…ガイドベーン、23…コルトノズル、24…回転軸、25…ブレード、26…2重反転プロペラ、27…ケーブル接続部、28…窓部、30…プロペラ駆動部、31…駆動シャフト、32…推力部、33…ガイドベーン駆動部、34(34B)…水流偏向部、35…照明装置、36…撮影装置、37…調節用ウエイト、40…配置面、41…支持棒、42…壁部、43…第1磁石、44…第1磁力連係部、45…第2磁石、46…第2磁力連係部、47…揺動棒、48…ソレノイド部、50…駆動調節部、51…通信線、52…支持装置用ケーブル送出制御部、53…支持装置用ケーブル送出装置、54…通信部、55…電源、56…電力供給線、57…電力供給線、58…通信線、59…ビークル用ケーブル送出制御部、60…ビークル用ケーブル送出装置、61…通信部、62…電力供給線、63…通信線、64…水深センサ、65…加速度センサ、66…ジャイロスコープ、67…通信部、70…円錐部、71…バランスウエイト、72…バランスウエイト駆動部、73…揺動軸。
Claims (14)
- 重量が水中で生じる浮力よりも大きくなるように予め設定されたビークル本体と、
スクリュープロペラを駆動させることで上向きの推力を発生させる推力部と、
前記スクリュープロペラの駆動を調節し、前記重量と前記浮力の差分相当の前記上向きの推力を発生させることで前記ビークル本体の水深を所定の位置に制御する駆動調節部と、
前記スクリュープロペラにより生じる下向きの水流を偏向させることで前記ビークル本体を水平方向に移動させる水流偏向部と、
を備えることを特徴とする水中移動ビークル。 - 前記駆動調節部は、前記差分を超える前記上向きの推力を発生させることで前記ビークル本体を上昇させ、前記差分未満の前記上向きの推力を発生させることで前記ビークル本体を降下させる請求項1に記載の水中移動ビークル。
- 前記水流偏向部は、
前記水流を案内する少なくとも2枚のガイドベーンと、
前記ガイドベーンの向きを変えることで前記水流を偏向させるガイドベーン駆動部と、
を備える請求項1に記載の水中移動ビークル。 - 前記水流偏向部は、
前記ビークル本体の姿勢を保つバランスウエイトと、
前記バランスウエイトを動かすことで前記ビークル本体の姿勢を傾けて前記水流を偏向させるバランスウエイト駆動部と、
を備える請求項1に記載の水中移動ビークル。 - 2組の前記スクリュープロペラが同軸に配置され、互いに逆方向に回転させる2重反転プロペラを備える請求項1に記載の水中移動ビークル。
- 水深を検出する水深センサを備え、
前記駆動調節部は、前記スクリュープロペラの回転数を前記水深センサで検出した水深に対応する回転数に制御することで前記ビークル本体の水深を一定に保つ請求項1に記載の水中移動ビークル。 - 前記ビークル本体は、重心を浮心よりも下方に配置することで前記スクリュープロペラの回転軸を垂直に維持する請求項1に記載の水中移動ビークル。
- 重量が水中で生じる浮力よりも小さくなるように予め設定されたビークル本体と、
スクリュープロペラを駆動させることで下向きの推力を発生させる推力部と、
前記スクリュープロペラの駆動を調節し、前記重量と前記浮力の差分相当の前記下向きの推力を発生させることで前記ビークル本体の水深を所定の位置に制御する駆動調節部と、
前記スクリュープロペラにより生じる上向きの水流を偏向させることで前記ビークル本体を水平方向に移動させる水流偏向部と、
を備えることを特徴とする水中移動ビークル。 - 前記駆動調節部は、前記差分未満の前記下向きの推力を発生させることで前記ビークル本体を上昇させ、前記差分を超える前記下向きの推力を発生させることで前記ビークル本体を降下させる請求項8に記載の水中移動ビークル。
- 前記水流偏向部は、
前記水流を案内する少なくとも2枚のガイドベーンと、
前記ガイドベーンの向きを変えることで前記水流を偏向させるガイドベーン駆動部と、
を備える請求項8に記載の水中移動ビークル。 - 前記水流偏向部は、
前記ビークル本体の姿勢を保つバランスウエイトと、
前記バランスウエイトを動かすことで前記ビークル本体の姿勢を傾けて前記水流を偏向させるバランスウエイト駆動部と、
を備える請求項8に記載の水中移動ビークル。 - 2組の前記スクリュープロペラが同軸に配置され、互いに逆方向に回転させる2重反転プロペラを備える請求項8に記載の水中移動ビークル。
- 水深を検出する水深センサを備え、
前記駆動調節部は、前記スクリュープロペラの回転数を前記水深センサで検出した水深に対応する回転数に制御することで前記ビークル本体の水深を一定に保つ請求項8に記載の水中移動ビークル。 - 前記ビークル本体は、重心を浮心よりも下方に配置することで前記スクリュープロペラの回転軸を垂直に維持する請求項8に記載の水中移動ビークル。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/301,695 US20190315446A1 (en) | 2016-05-16 | 2017-04-19 | Underwater moving vehicle |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-098045 | 2016-05-16 | ||
| JP2016098045A JP2017206058A (ja) | 2016-05-16 | 2016-05-16 | 水中移動ビークル |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017199669A1 true WO2017199669A1 (ja) | 2017-11-23 |
Family
ID=60325002
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/015744 WO2017199669A1 (ja) | 2016-05-16 | 2017-04-19 | 水中移動ビークル |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20190315446A1 (ja) |
| JP (1) | JP2017206058A (ja) |
| WO (1) | WO2017199669A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108791782A (zh) * | 2018-07-12 | 2018-11-13 | 太原融盛科技有限公司 | 一种水下四螺旋桨矢量喷水推进装置 |
| CN111874193A (zh) * | 2020-08-26 | 2020-11-03 | 沈阳工业大学 | 一种小型多功能水下机器人及其工作方法 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11535348B2 (en) * | 2017-03-31 | 2022-12-27 | Honda Motor Co., Ltd. | Sailing assisting system for vessel |
| AU2019397603A1 (en) * | 2018-12-11 | 2021-05-13 | Fugro N.V. | Buoyant camera device and method |
| USD921561S1 (en) * | 2019-11-14 | 2021-06-08 | Shenzhen Lefeet Innovation Technology Co., Ltd. | Single cylinder single handle underwater propeller |
| CN111645838B (zh) * | 2020-06-15 | 2021-04-06 | 中国船舶科学研究中心 | 导管桨支撑分区预旋导流装置 |
| KR102553691B1 (ko) * | 2022-11-30 | 2023-07-10 | 유동규 | 자동 채수기 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5993200A (ja) * | 1982-11-17 | 1984-05-29 | 三菱重工業株式会社 | 自沈型水中航走体 |
| JPS62114686U (ja) * | 1985-12-28 | 1987-07-21 | ||
| JPH02216389A (ja) * | 1989-02-17 | 1990-08-29 | Toshiba Corp | 水中点検装置 |
| JPH0443190A (ja) * | 1990-06-08 | 1992-02-13 | Mitsubishi Heavy Ind Ltd | 大型潜水船 |
| JPH09222492A (ja) * | 1996-02-20 | 1997-08-26 | Toshiba Corp | 原子炉内作業用プラットホーム |
| JP2000280981A (ja) * | 1999-03-31 | 2000-10-10 | Tech Res & Dev Inst Of Japan Def Agency | 推力制御装置付ポンプジェット推進器 |
| JP2007132769A (ja) * | 2005-11-10 | 2007-05-31 | Hitachi Ltd | 水中検査装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS47680Y1 (ja) * | 1971-03-26 | 1972-01-11 | ||
| US3742885A (en) * | 1971-09-24 | 1973-07-03 | Us Navy | Diver operated hand control system for an underwater vehicle |
| US8220408B2 (en) * | 2007-07-31 | 2012-07-17 | Stone William C | Underwater vehicle with sonar array |
| US20170081005A1 (en) * | 2015-09-21 | 2017-03-23 | Lockheed Martin Corporation | Autonomous unmanned underwater vehicles |
| US10322783B2 (en) * | 2015-10-16 | 2019-06-18 | Seabed Geosolutions B.V. | Seismic autonomous underwater vehicle |
| GB201518299D0 (en) * | 2015-10-16 | 2015-12-02 | Autonomous Robotics Ltd | Underwater vehicle |
| US10543892B2 (en) * | 2017-02-06 | 2020-01-28 | Seabed Geosolutions B.V. | Ocean bottom seismic autonomous underwater vehicle |
-
2016
- 2016-05-16 JP JP2016098045A patent/JP2017206058A/ja active Pending
-
2017
- 2017-04-19 WO PCT/JP2017/015744 patent/WO2017199669A1/ja active Application Filing
- 2017-04-19 US US16/301,695 patent/US20190315446A1/en not_active Abandoned
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5993200A (ja) * | 1982-11-17 | 1984-05-29 | 三菱重工業株式会社 | 自沈型水中航走体 |
| JPS62114686U (ja) * | 1985-12-28 | 1987-07-21 | ||
| JPH02216389A (ja) * | 1989-02-17 | 1990-08-29 | Toshiba Corp | 水中点検装置 |
| JPH0443190A (ja) * | 1990-06-08 | 1992-02-13 | Mitsubishi Heavy Ind Ltd | 大型潜水船 |
| JPH09222492A (ja) * | 1996-02-20 | 1997-08-26 | Toshiba Corp | 原子炉内作業用プラットホーム |
| JP2000280981A (ja) * | 1999-03-31 | 2000-10-10 | Tech Res & Dev Inst Of Japan Def Agency | 推力制御装置付ポンプジェット推進器 |
| JP2007132769A (ja) * | 2005-11-10 | 2007-05-31 | Hitachi Ltd | 水中検査装置 |
Non-Patent Citations (1)
| Title |
|---|
| RICK MOORE: "WORLD'S FIRST SUBMARINE DRONE!! The ''MARINER'' Waterproof Drone, filmed in St Maarten, SXM, CARIBBEAN", 7 January 2015 (2015-01-07), Retrieved from the Internet <URL:https://www.youtube.com/watch?v=UaRpTclSwX0> [retrieved on 20170613] * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108791782A (zh) * | 2018-07-12 | 2018-11-13 | 太原融盛科技有限公司 | 一种水下四螺旋桨矢量喷水推进装置 |
| CN111874193A (zh) * | 2020-08-26 | 2020-11-03 | 沈阳工业大学 | 一种小型多功能水下机器人及其工作方法 |
| CN111874193B (zh) * | 2020-08-26 | 2023-12-26 | 沈阳工业大学 | 一种小型多功能水下机器人及其工作方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190315446A1 (en) | 2019-10-17 |
| JP2017206058A (ja) | 2017-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017199669A1 (ja) | 水中移動ビークル | |
| CN106103274B (zh) | 无人机、其控制系统及方法,以及无人机降落控制方法 | |
| JP6214613B2 (ja) | 水中撮影装置 | |
| EP2301837A1 (en) | Underwater posture stabilization device and diving device equipped with the same | |
| JP6455046B2 (ja) | 水中機器の姿勢制御装置 | |
| JP2017159816A (ja) | 水中ロボット | |
| JPH02216389A (ja) | 水中点検装置 | |
| JP2009121241A (ja) | 水流発電装置 | |
| JP2006313152A (ja) | 浸漬ボアの中へツールを送り出す装置 | |
| KR102306872B1 (ko) | 수상 이착륙이 가능한 드론 | |
| KR20160093242A (ko) | 수공양용 쿼드콥트 | |
| JP6493912B2 (ja) | 水陸探査用ロボット | |
| JP2013242265A (ja) | 水中浮遊式採泥装置 | |
| RU173254U1 (ru) | Роботизированное плавательное средство для осуществления исследовательских и подводно-технических работ | |
| CN110871448A (zh) | 一种水下清淤巡检机器人 | |
| CN112093016B (zh) | 一种可调整姿态以及位置反馈的水下运载装置 | |
| CN113511039A (zh) | 一种具有深潜功能的探测装置及其探测方法 | |
| CN110525614A (zh) | 一种水下检测装置以及无人船检测系统 | |
| CN111284666A (zh) | 一种潜水器 | |
| JP2008261807A (ja) | 原子炉内点検用水中遠隔操作ビークル | |
| KR101887385B1 (ko) | 해양 탐사 로봇 및 해양 탐사 로봇에 장착되는 다리 | |
| WO2016075864A1 (ja) | 水中用ロボット | |
| CN111674529B (zh) | 全方位水下监测机器人 | |
| KR102056319B1 (ko) | 선박 인양 로봇 | |
| JPH10221481A (ja) | 遊泳式点検装置とそのシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17799101 Country of ref document: EP Kind code of ref document: A1 |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17799101 Country of ref document: EP Kind code of ref document: A1 |