WO2017168802A1 - 操船装置 - Google Patents
操船装置 Download PDFInfo
- Publication number
- WO2017168802A1 WO2017168802A1 PCT/JP2016/080442 JP2016080442W WO2017168802A1 WO 2017168802 A1 WO2017168802 A1 WO 2017168802A1 JP 2016080442 W JP2016080442 W JP 2016080442W WO 2017168802 A1 WO2017168802 A1 WO 2017168802A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- propeller
- backward
- thrust
- starboard
- ship
- Prior art date
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H25/00—Steering; Slowing-down otherwise than by use of propulsive elements; Dynamic anchoring, i.e. positioning vessels by means of main or auxiliary propulsive elements
- B63H25/42—Steering or dynamic anchoring by propulsive elements; Steering or dynamic anchoring by propellers used therefor only; Steering or dynamic anchoring by rudders carrying propellers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/21—Control means for engine or transmission, specially adapted for use on marine vessels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H25/00—Steering; Slowing-down otherwise than by use of propulsive elements; Dynamic anchoring, i.e. positioning vessels by means of main or auxiliary propulsive elements
- B63H25/02—Initiating means for steering, for slowing down, otherwise than by use of propulsive elements, or for dynamic anchoring
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H25/00—Steering; Slowing-down otherwise than by use of propulsive elements; Dynamic anchoring, i.e. positioning vessels by means of main or auxiliary propulsive elements
- B63H25/06—Steering by rudders
- B63H25/08—Steering gear
- B63H25/14—Steering gear power assisted; power driven, i.e. using steering engine
- B63H25/18—Transmitting of movement of initiating means to steering engine
- B63H25/24—Transmitting of movement of initiating means to steering engine by electrical means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H5/00—Arrangements on vessels of propulsion elements directly acting on water
- B63H5/07—Arrangements on vessels of propulsion elements directly acting on water of propellers
- B63H5/08—Arrangements on vessels of propulsion elements directly acting on water of propellers of more than one propeller
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H5/00—Arrangements on vessels of propulsion elements directly acting on water
- B63H5/07—Arrangements on vessels of propulsion elements directly acting on water of propellers
- B63H5/16—Arrangements on vessels of propulsion elements directly acting on water of propellers characterised by being mounted in recesses; with stationary water-guiding elements; Means to prevent fouling of the propeller, e.g. guards, cages or screens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/21—Control means for engine or transmission, specially adapted for use on marine vessels
- B63H2021/216—Control means for engine or transmission, specially adapted for use on marine vessels using electric control means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H25/00—Steering; Slowing-down otherwise than by use of propulsive elements; Dynamic anchoring, i.e. positioning vessels by means of main or auxiliary propulsive elements
- B63H25/02—Initiating means for steering, for slowing down, otherwise than by use of propulsive elements, or for dynamic anchoring
- B63H2025/026—Initiating means for steering, for slowing down, otherwise than by use of propulsive elements, or for dynamic anchoring using multi-axis control levers, or the like, e.g. joysticks, wherein at least one degree of freedom is employed for steering, slowing down, or dynamic anchoring
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/21—Control means for engine or transmission, specially adapted for use on marine vessels
- B63H21/213—Levers or the like for controlling the engine or the transmission, e.g. single hand control levers
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Mechanical Control Devices (AREA)
Abstract
回頭用の校正を容易に実施できる操船装置を提供することを課題とする。操船装置(7)は、回頭用の校正時に、ジョイスティックレバー(10)の回転操作によって左舷及び右舷の前後進プロペラ(4)をそれぞれ回転させ、ジョイスティックレバー(10)の傾斜操作によって左舷及び右舷の前後進プロペラ(4)の前後進推進比又は各回転数を変更させ、校正実行スイッチ(10a)が操作される場合に、変更させた前後進推進比に応じて発生する推力を補正係数として設定する、或いは、変更させた左舷及び右舷の前後進プロペラ(4)の回転数(Npn、Nsn)によって発生する推力のうち、傾斜操作による左舷及び右舷の前後進プロペラ(4)の推力を補正係数(Cp、Cs)として設定することによって、回頭用の校正を実施する。
Description
本発明は、船舶に搭載される操船装置に関する。
従来、船体内部に配置された原動機(エンジン)から切換クラッチ、プロペラシャフトを介して船体外部に配置された前後進プロペラに動力を伝達する船舶(シャフト船)が知られている。また、接岸時等における操船性の向上のために、船舶を左右一側に向かって横移動させるためのサイドスラスタが設けられた船舶が知られている。サイドスラスタは、左右方向に推力が発生するように船首側の左右方向中央付近にプロペラを配置したものである。
このようなサイドスラスタを含む2軸のシャフト船について、ジョイスティックレバーを用いることで船舶の操縦を簡単にすることが可能な操船装置が公知である(特許文献1参照)。当該操船装置によれば、操船手段としてのジョイスティックレバーの操作によって、操縦者が船体の挙動変化を熟知していなくても、船体の平行移動、その場回頭等、所望の微速移動を容易に実現することができる。
しかし、船体に作用する回転モーメントを計算するうえで定義される回頭中心と、乗船する操縦者が意図する回頭中心とは、必ずしも一致しない。また、乗船する操縦者が異なる場合には、各操縦者が意図する回頭中心は操縦者ごとにそれぞれ異なるため、操縦者の操作フィーリングが損なわれるおそれがある。
そのため、各操縦者が意図する回頭中心を中心とする回頭が都度得られるように、各操縦者が必要に応じて回頭用の校正(回頭キャリブレーション)を適宜実施することができれば、このような操作フィーリングの低下を防止できる。従って、乗船する操縦者ごとに所望の回頭が得られるように、回頭用の校正を容易に実施できる操船装置が望まれている。
本発明は、回頭用の校正を容易に実施できる操船装置を提供することを目的とする。
本発明の操船装置は、左舷のプロペラシャフトに連結されて推力を発生させる左舷の前後進プロペラと、右舷のプロペラシャフトに連結されて推力を発生させる右舷の前後進プロペラと、が設けられる船舶に搭載される操船装置であって、回転操作自在且つ傾斜操作自在に構成されて前記船舶の移動速度と移動方向とを決定するためのジョイスティックレバーを備え、回頭用の校正時に、前記ジョイスティックレバーの回転操作によって前記左舷の前後進プロペラ及び前記右舷の前後進プロペラをそれぞれ回転させ、前記ジョイスティックレバーの傾斜操作によって前記左舷の前後進プロペラの前後進推進比若しくは前記右舷の前後進プロペラの前後進推進比、又は、前記左舷の前後進プロペラ及び前記右舷の前後進プロペラの各回転数を変更させ、校正実行用の操作具が操作される場合には、変更させた前記前後進推進比に応じて発生する推力を補正係数として設定する、或いは、変更させた前記左舷の前後進プロペラ及び前記右舷の前後進プロペラの各回転数によって発生する推力のうち、前記傾斜操作による前記左舷の前後進プロペラの推力及び前記右舷の前後進プロペラの推力を補正係数として設定することによって、回頭用の校正を実施するものである。
本発明の操船装置は、左舷のプロペラシャフトに連結されて推力を発生させる左舷の前後進プロペラと、右舷のプロペラシャフトに連結されて推力を発生させる右舷の前後進プロペラと、が設けられる船舶に搭載される操船装置であって、回転操作自在に構成されて前記船舶の回頭速度と回頭方向とを決定するためのジョイスティックレバーと、前記船舶を前進又は後進させるための操作手段と、を備え、回頭用の校正時に、前記ジョイスティックレバーの回転操作によって前記左舷の前後進プロペラ及び前記右舷の前後進プロペラをそれぞれ回転させ、前記操作手段の所定操作によって前記左舷の前後進プロペラの前後進推進比若しくは前記右舷の前後進プロペラの前後進推進比、又は、前記左舷の前後進プロペラ及び前記右舷の前後進プロペラの各回転数を変更させ、校正実行用の操作具が操作される場合には、変更させた前記前後進推進比に応じて発生する推力を補正係数として設定する、或いは、変更させた前記左舷の前後進プロペラ及び前記右舷の前後進プロペラの各回転数によって発生する推力のうち、前記所定操作による前記左舷の前後進プロペラの推力及び前記右舷の前後進プロペラの推力を補正係数として設定することによって、回頭用の校正を実施するものである。
本発明の操船装置においては、前記ジョイスティックレバーの操作が開始される場合に、前記船舶の舵を中立位置に保持させることが好ましい。
本発明の操船装置によれば、ジョイスティックレバーの回転操作と傾斜操作との組み合わせによって、操縦者が意図する回頭を実現している状況下の左舷及び右舷の前後進プロペラの各回転数を、回転操作される場合に発生させる各回転数として容易に決定できる。このように、ジョイスティックレバーの回転操作と傾斜操作との組み合わせによって、乗船する操縦者ごとに回頭用の校正を容易に実施できる。従って、回頭用の校正を容易に実施できる操船装置を提供することができる。
本発明の操船装置によれば、ジョイスティックレバーの回転操作と操作手段の所定操作との組み合わせによって、操縦者が意図する回頭を実現している状況下の左舷及び右舷の前後進プロペラの各回転数を、回転操作される場合に発生させる各回転数として容易に決定できる。このように、ジョイスティックレバーの回転操作と操作手段の所定操作との組み合わせによって、乗船する操縦者ごとに回頭用の校正を容易に実施できる。従って、回頭用の校正を容易に実施できる操船装置を提供することができる。
本発明の操船装置によれば、適切な各補正係数を確実に決定することができる。
まず、図1、図2及び図3を用いて、操船装置7を備える船舶100の全体概要及び構成について説明する。なお、図1の船舶100は、いわゆる二軸推進方式の船舶(シャフト船)を示している。但し、推進軸の数や推進装置の形式はこれに限定されるものではなく、複数の軸を有するものやアウトドライブ方式、又は、POD(ポッド)方式のものであってもよい。以下において、船舶100の船首方向を前として前後左右方向を規定する。
図1と図2とに示すように、船舶100は、動力源としてのエンジン2の動力が、プロペラシャフト4aを介して前後進プロペラ4に伝達されるシャフト船である。船舶100の船体1には、エンジン2、切換クラッチ3、前後進プロペラ4、舵5、サイドスラスタ6及びECU16からなる推進装置17と、アクセルレバー8、操舵ハンドル9、ジョイスティックレバー10、サイドスラスタコントローラー11、モニタ12、GPS装置13、ヘディングセンサ(方位センサ)14及び操船制御装置15からなる操船装置7とが具備される。なお、船舶100は、左舷と右舷とに推進装置17を有するシャフト船としたがこれに限定されるものではなく、スタンドライブ船等でもよく、POD(ポッド)式の推進装置を有する船舶であってもよい。スラスタは、船頭に設けられるバウスラスタだけでなく、船尾に設けられるスタンスラスタでもよい。
2つのエンジン2は、左舷と右舷との前後進プロペラ4をそれぞれ回転させるための動力を発生させる。エンジン2は、船体1の左舷後部側と右舷後部側とにそれぞれ配置されている。エンジン2の出力軸には、切換クラッチ3がそれぞれ接続されている。
2つの切換クラッチ3は、エンジン2の出力部から伝達された動力を正回転方向と逆回転方向とに切り換えて出力するものである。切換クラッチ3の入力側には、エンジン2の出力部が接続されている。切換クラッチ3の出力側には、プロペラシャフト4aがそれぞれ接続されている。つまり、切換クラッチ3は、エンジン2からの動力をプロペラシャフト4aに伝達するように構成されている。
2つの前後進プロペラ4は、前後方向の推力を発生させるものである。前後進プロペラ4は、船体1の左舷の船底と右舷の船底とを貫通して船外に至るように設けられている2本のプロペラシャフト4aにそれぞれ接続されている。前後進プロペラ4は、プロペラシャフト4aを介して伝達されたエンジン2の動力によって回転駆動され、その回転軸周りに配置された複数枚のブレードが周囲の水をかくことによって推力を発生させる。
2つの舵5は、前後進プロペラ4の回転駆動により発生した水流の方向を変更するものである。舵5は、船体1の左舷の船底後端(船尾側)と右舷の船底後端(船尾側)とであって前後進プロペラ4の後方にそれぞれ配置されている。舵5は、船体1に設けられた回転軸を中心として左右方向に所定の角度範囲で回転可能に構成されている。舵5は、操舵ハンドル9と連動可能に連結されている。これにより、舵5は、操舵ハンドル9の操作によってその後端部を船体1の右側に向けると、水流により発生した推力によって船舶100の船尾が左側に推され、船首側が右側を向くように構成されている。同様に舵5は、操舵ハンドル9の操作によってその後端部を船舶100の左側に向けると、水流により発生した推力によって船舶100の船尾が右側に推され、船首側が左側を向くように構成されている。
サイドスラスタ6は、左右方向の推力を発生させるものである。サイドスラスタ6は、船体1の船首側であって左右方向中央に設けられている。サイドスラスタ6は、プロペラ6aとモータ6bとを具備している。モータ6bは、一定の回転数(単位はrpm)で回転可能に構成され、モータ6bの駆動時間と非駆動時間とが調整されることによって所定の推力を発生させる。モータ6bの駆動時間が増えるにしたがって、発生する推力は大きくなる。サイドスラスタ6は、プロペラ6aによって発生する推力が船体1の左右方向を向くように構成されている。サイドスラスタ6は、サイドスラスタコントローラー11からの信号に基づいてモータ6bが駆動することによりプロペラ6aが回転され、左右方向に任意の大きさの推力を発生させる。なお、モータ6bは、サイドスラスタコントローラー11に接続され、任意の回転数で回転可能に構成されていてもよい。
操船装置7を構成するアクセルレバー8は、左舷の前後進プロペラ4の回転数(単位はrpm)、右舷の前後進プロペラ4の回転数(単位はrpm)及びそれらの回転方向についての信号を生成するものである。アクセルレバー8は、左舷の前後進プロペラ4に対応したレバーと右舷の前後進プロペラ4に対応したレバーとから構成されている。つまり、アクセルレバー8は、左舷の前後進プロペラ4と右舷の前後進プロペラ4とについての信号をそれぞれ独立して生成するように構成されている。アクセルレバー8は、船舶100の前後方向に任意の角度で傾斜するように構成されている。アクセルレバー8は、操作方向及び操作量に応じて各エンジン2の回転数(単位はrpm)と対応する切換クラッチ3の切り換え状態についての信号をそれぞれ独立して生成するように構成されている。アクセルレバー8は、前方に傾斜するように操作されると船舶100が前進する推力を発生させるように前後進プロペラ4の信号を生成し、後方に傾斜するように操作されると船舶100が後進する推力を発生させるように前後進プロペラ4の信号を生成する。
操船装置7を構成する操舵ハンドル9は、舵5の回転角度を変更するものである。操舵ハンドル9は、左舷と右舷との舵5に油圧回路を介して連動連結されている。操舵ハンドル9は、右方向に回転操作されると舵5の後端部が右側に向かうように回転する。これにより、船舶100は、前後進プロペラ4により発生した水流が右側に向かうことで船尾が左側に推され、船首側が右側を向くように構成されている。同様にして、操舵ハンドル9は、左方向に回転操作されると舵5の後端部が左側に向かうように回転する。これにより、船舶100は、前後進プロペラ4により発生した水流が左側に向かうことで船尾が右側に推され、船首側が左側を向くように構成されている。
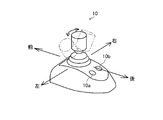
図1と図3とに示すように、操船装置7を構成するジョイスティックレバー10は、船舶100を任意の方向に移動させるための信号を生成するものである。ジョイスティックレバー10は、任意の方向に任意の角度で傾斜できるように構成されている。また、ジョイスティックレバー10は、レバー軸周りに任意の角度に回転操作できるように構成されている。
ジョイスティックレバー10は、操作態様及び操作量に応じてエンジン2の回転数と切換クラッチ3の切り換え状態とについての信号、及び、サイドスラスタ6の駆動時間についての信号を生成するように構成されている。具体的には、ジョイスティックレバー10は、任意の方向に傾斜するように操作されると、操作量と操作時間とに応じた推力で船舶100を操作方向に移動させるための両舷の前後進プロペラ4とサイドスラスタ6との信号を生成する。また、ジョイスティックレバー10は、レバー軸周りに回転するように操作されると、操作量と操作時間とに応じた推力で船舶100を任意の方向に回転させるための両舷の前後進プロペラ4の信号を生成する。このように、ジョイスティックレバー10は、船舶100の回頭速度と回頭方向とを決定する。モータ6b(図1参照)が任意の回転数で回転できるようにサイドスラスタ6が構成されている場合には、ジョイスティックレバー10は、サイドスラスタ6の回転数を任意に設定するための信号を生成する。このようにして、ジョイスティックレバー10は、船舶100の移動速度と移動方向とを決定する。
ジョイスティックレバー10は、横移動についての校正、斜め移動についての校正、及び、回頭についての校正を行うための校正実行スイッチ10aを具備している。校正実行スイッチ10aは、ON・OFFスイッチ若しくはタクタイルスイッチで構成されている。校正実行スイッチ10aは、横移動、斜め移動、及び、回頭についての校正の開始を指示するためのスイッチである。また、各校正の実施時に校正実行スイッチ10aが操作されると、これらの各校正の制御態様に基づいて補正係数を決定し、その補正係数に基づいて回転数等の設定値を校正する。
ジョイスティックレバー10は、ジョイスティックレバー10による操船を可能とするレバー操作スイッチ10bを具備しており、レバー操作スイッチ10bは、ON・OFFスイッチ若しくはタクタイルスイッチで構成されている。操縦者の操作によってレバー操作スイッチ10bが有効となると、船舶100はジョイスティックレバー10による操船が可能な状態になる。操縦者の操作によってレバー操作スイッチ10bが無効となると、船舶100はジョイスティックレバー10を操作しても操船出来ない状態となる。
操船装置7を構成するサイドスラスタコントローラー11は、サイドスラスタ6を駆動させるものである。サイドスラスタコントローラー11は、オン操作されるとサイドスラスタ6のプロペラ6aによって左右方向の推力が発生するようにサイドスラスタ6のモータ6bを任意の回転方向で回転させる。
操船装置7を構成するGPS(GPS:Global Positioning System)装置13は、船舶100の位置座標を計測(算出)するものである。GPS装置13は、複数のGPS衛星からの信号を受信することで船舶100の位置座標を算出し、現在の位置を緯度La(n)と経度Lo(n)として出力する。つまり、位置算出装置としてのGPS装置13は、船舶100の位置座標の絶対値を算出する。
操船装置7を構成する方位算出装置であるヘディングセンサ14は、船舶100の方向を計測(算出)するものである。ヘディングセンサ14は、GPS装置13の情報から船舶100の船首の方位を算出する。つまり、ヘディングセンサ14は、船舶100の船首の絶対方位を算出する。
図1に示すように、ECU16は、エンジン2を制御するものである。ECU16には、エンジン2の制御を行うための種々のプログラムやデータが格納される。ECU16は、各エンジン2にそれぞれ設けられる。ECU16は、CPU、ROM、RAM、HDD等がバスで接続される構成であってもよく、或いは、ワンチップのLSI等からなる構成であってもよい。
ECU16は、エンジン2の図示しない燃料供給ポンプの燃料調量弁、燃料噴射弁及び各種センサ等と接続され、燃料調量弁の開度、燃料噴射弁の開閉を制御することができ、各種センサが検出する情報を取得することが可能である。
操船装置7を構成する操船制御装置15は、アクセルレバー8、操舵ハンドル9及びジョイスティックレバー10等からの検出信号に基づいてエンジン2、切換クラッチ3及びサイドスラスタ6を制御するものである。操船制御装置15は、GPS装置13からの情報に基づいて自らの位置と設定された目的地とから航路を算出して自動で操船を行なう、いわゆる自動航法を可能に構成されている。
操船制御装置15は、エンジン2、切換クラッチ3、サイドスラスタ6の制御を行うための種々のプログラムやデータが格納される。
操船制御装置15は、各切換クラッチ3及び各エンジン2のECU16に接続され、各切換クラッチ3の状態、各エンジン2の起動状況及び各ECU16が各種センサから取得するエンジン回転数や各種信号を取得することが可能である。
操船制御装置15は、各切換クラッチ3にクラッチの状態を変更する(切り換える)信号を送信することが可能である。
操船制御装置15は、ECU16に燃料供給ポンプの燃料調量弁、燃料噴射弁その他エンジン2の各種機器を制御するための信号を送信することが可能である。
操船制御装置15は、アクセルレバー8及びジョイスティックレバー10と接続され、アクセルレバー8及びジョイスティックレバー10からの信号を取得することが可能である。
操船制御装置15は、サイドスラスタ6のサイドスラスタコントローラー11に接続され、サイドスラスタ6を制御するための信号を送信することが可能である。
操船制御装置15は、GPS装置13及びヘディングセンサ14に接続され、船舶100の絶対座標と絶対方位とを取得することが可能である。
操船制御装置15は、モニタ12に接続され、船舶100の現在位置やジョイスティックレバー10による操船状況をモニタ12に表示させることが可能である。
以下では、操船装置7による回頭の校正について説明する。
先ず、発明者は、左舷及び右舷の舵5を中立位置(即ち、船舶100を直進させるための位置)に保持させ、且つ、サイドスラスタ6は駆動させない状態で、左舷と右舷との前後進プロペラ4を互いに逆方向に同じ回転数だけ回転させる(言い換えると、左舷と右舷との前後進プロペラ4の前後進推進比を合せる)ことによって、船舶100が重心Gを中心に回頭することを見出した。
図4は、操船装置7を備えた船舶100の横移動時におけるサイドスラスタ6、及び、左舷と右舷との前後進プロペラ4から生じる推力の態様を示している。図4に示すように、任意の形状からなる船体1の重心Gから船首方向に向かって重心間距離L1の位置にサイドスラスタ6が設けられ、船尾の左舷と右舷とに前後進プロペラ4が軸間距離L2で設けられているとする。
船舶100におけるサイドスラスタ6による推力Tt0、左舷の前後進プロペラ4による推力Tp0及び右舷の前後進プロペラ4による推力Ts0の重心周りのモーメントのつりあいは以下の数1に示す通りである。更に、推力Tp0と推力Ts0との平均値を基準推力T0、推力Tp0と推力Ts0との推力差をΔT0とすると、推力Tp0と推力Ts0との関係は数2、数3に示す通りである。これにより、推力差ΔT0は、数4に示す通り重心間距離L1と軸間距離L2との比率と推力Tt0との関数として表される。




しかしながら、乗船する操縦者が意図する回頭中心は、実際の回頭中心(即ち、船舶100の重心G)に必ずしも一致しない。例えば、図示しない操船席の位置又は船首と船尾との中間位置等に重心があると操縦者が推測しているにも関わらず、船体1の形状、エンジン2の位置、積載物の量等によっては操縦者が推測する位置からずれた位置に船体1の重心Gがあるような事案が考えられる。この場合には、船舶100がその場回頭するように操縦者が船舶100を操縦したとしても、船体1には操縦者の意図した動作とは異なる動作が生じる。例えば、この場合に、船舶100の重心Gを中心にして船体1がその場回頭することによって、操縦者が意図する回頭中心には回頭成分が生じる。
そこで、発明者は、操縦者が認識する位置からずれた位置に船体1の重心Gがあるとしても、操縦者の意図する回頭中心を中心にして船舶100をその場回頭させることが可能な方法について思案した。その結果、発明者は、重心Gを中心とするその場回頭のための推力を発生させている左舷と右舷との前後進プロペラ4のうちの一方の前進側の推力を増大又は減少させ且つ他方の後進側の推力を減少又は増大させる、或いは、前後進プロペラ4の前後進推進比自体を変更させることによって、意図する回頭中心に回頭成分が生じることなく回頭中心の位置を船体1の前後方向に移動させることができることを見出した。
具体的には、所望の回頭中心が船舶100の重心Gの位置よりも船頭側にある場合には、船舶100のその場回頭のための左舷と右舷との前後進プロペラ4の各回転数に対して、後方へ推力を発生させている一方の前後進プロペラ4の回転数が上昇(推力が増大)し、且つ、前方へ推力を発生させている他方の前後進プロペラ4の回転数が低下(推力が減少)することにより、船舶100自体が前後へ移動することなく、実際の回頭中心だけが重心Gの位置から船頭側へ移動することができる。
なお、操縦者が意図する回頭中心が重心Gの位置よりも船尾側にある場合は、これの逆となる。つまり、所望の回頭中心が船舶100の重心Gよりも船尾側にある場合には、船舶100の回頭のための左舷と右舷との前後進プロペラ4の各回転数に対して、後方へ推力を発生させている一方の前後進プロペラ4の回転数が低下(推力が減少)し、且つ、前方へ推力を発生させている他方の前後進プロペラ4の回転数が上昇(推力が増大)することにより、船舶100自体が前後へ移動することなく、実際の回頭中心だけが重心Gの位置から船頭側へ移動することができる。
このようにして、操縦者は、操船装置7に対して、操船装置7が搭載される船舶100ごとに、回頭の際の左舷及び右舷の前後進プロペラ4の各推力の校正を実施することにより、実際の回頭中心を意図する回頭中心に一致させることができる。また、操船装置7は、重心Gを中心とする船舶100のその場回頭のための左舷と右舷との前後進プロペラ4の各推力に対して、操縦者が意図する回頭中心を中心にしてその場回頭できる左舷と右舷との前後進プロペラ4の推力の補正量を記憶できる。任意の回頭速度で回頭の校正を実施すれば、異なる別の回頭速度において回頭を実施する際にも、操船装置7はこの補正量を利用して回頭中心を補正することができ、船舶100は操縦者が意図する回頭中心を中心にして回頭することができるようになる。
以下では、回頭用の校正を行う回頭モードによる校正手順を具体的に説明する。
なお、操船装置7は、各スイッチ10a・10bの操作を含めて、ジョイスティックレバー10の操作が開始される場合に、左右の舵5を中立位置(即ち、船舶100を直進させるための位置)に保持させる。
図5(A)に示すように、船舶100は、ジョイスティックレバー10のレバー軸周りの回転操作により回頭する場合、ジョイスティックレバー10の時計回り又は反時計回りの回転量に応じた左舷の前後進プロペラ4による推力Tp1と右舷の前後進プロペラ4による推力Ts1とによって、回転操作方向に応じて回頭する。なお、船体1の回頭のためのジョイスティックレバー10の回転操作だけでは、サイドスラスタ6のモータ6bは回転せず、サイドスラスタ6から推力は発生しない。サイドスラスタ6は、船体1の斜め移動と横移動とのためのジョイスティックレバー10の傾斜操作の操作時間に応じて推力を発生させる。
重心Gの位置から意図する回頭中心(例えば、より船頭側)への実際の回頭中心の移動のためには、回転操作とともに、意図する回頭中心を中心にして船舶100が回頭する傾斜角度でジョイスティックレバー10が前方に傾斜操作される。より船尾側への実際の回頭中心の移動のためには、回転操作とともに、意図する回頭中心を中心にして船舶100が回頭する傾斜角度でジョイスティックレバー10が後方に傾斜操作される。
このような傾斜操作が回転操作に加えられると、図5(B)に示すように、推力の補正量Tpr・Tsrが、回頭のための左舷と右舷との前後進プロペラ4による推力Tp1・Ts1(図5(A)参照)にベクトル加算される。図5(B)に示す補正量Tpr・Tsrは、船舶100を前進させる推力であって、重心Gを中心として船舶100をその場回頭させる左舷と右舷との前後進プロペラ4による推力Tp1・Ts1に対して、実際の回頭中心を重心Gの位置からより船頭側に移動させる推力である。
このような補正量Tpr・Tsrが左舷と右舷との前後進プロペラ4による推力Tp1・Ts1に加えられることにより、図5(C)に示すように、操縦者が意図する回頭中心Ciを中心にして回頭する。つまり、船舶100は、ジョイスティックレバー10の回転量及び傾斜角度に応じた左舷の前後進プロペラ4による推力Tpnと右舷の前後進プロペラ4による推力Tsnとによって、回頭中心Ciを中心にして回頭する。このように、実際の回頭中心が重心Gから船体1の前後方向に移動することにより、船舶100は、操縦者の意図する回頭中心Ciを中心にしてその場回頭することができる。
なお、操船装置7は、ジョイスティックレバー10の他に、図示しない別の操作手段を備えていてもよい。操縦者は、ジョイスティックレバー10の回転操作に対する傾斜操作の代わりに、別の操作手段の操作によって、回頭用の校正を実施することができる。
例えば、回頭用の校正時には、タッチパネル式のモニタ12(図1参照)上に船体1の前方向を示す矢印と後方向を示す矢印とが表示される(図示せず)。前方向を示す矢印のタッチ操作によれば、左舷と右舷との前後進プロペラ4による推力は、船舶100を前進させるように変化する。後方向を示す矢印のタッチ操作によれば、左舷と右舷との前後進プロペラ4による推力は、船舶100を後進させるように変化する。回頭用の校正時における二つの矢印に対するタッチ操作は、船舶100を前進又は後進させる所定操作である。
また、操縦者が着座するための上記操船席の近傍には、船舶100を前進させるボタンと船舶100を後進させるボタンとが設けられていてもよい(図示せず)。回頭用の校正時における二つのボタンに対する操作は、船舶100を前進又は後進させる所定操作である。
次に、操船制御装置15を含む操船装置7における回頭用の校正の制御態様について、具体的に説明する。
図6に示すように、ステップS11において、操船制御装置15は、ジョイスティックレバー10から回頭用の校正の開始を指示する信号を取得すると、回頭についての校正を行うモード(回頭モードという)に変更し、ステップをステップS12に移行させる。
ステップS12において、操船制御装置15は、レバー軸周りに回転操作されたジョイスティックレバー10の時計回り又は反時計回りの何れかの回転方向と回転量とに対応した信号を所定時間ごとに取得すると、ステップをステップS13に移行させる。
操船制御装置15は、ジョイスティックレバー10が回転操作された信号を取得すると、ステップS13において、回転方向及び回転量に応じて、左舷と右舷との前後進プロペラ4の間で推力差ΔT1が生じるように、左舷の前後進プロペラ4を推力Tp1が生じる回転数である回転数Np1で回転させ、右舷の前後進プロペラ4を推力Ts1が生じる回転数である回転数Ns1で回転させ、回転数差ΔN1が生じている状態で、ステップをステップS14に移行させる。
ステップS14において、操船制御装置15は、校正実行スイッチ10a(図3参照)がオンに操作されたか否かを判定する。ここで、操船制御装置15は、Yesと判定する場合にはステップをステップS17に移行させ、Noと判定する場合にはステップをステップS15に移行させる。
ステップS15において、操船制御装置15は、ジョイスティックレバー10の回転方向と回転量とに対応した信号とともに、傾斜操作されたジョイスティックレバー10の傾斜方向と傾斜角度とに対応した信号を所定時間ごとに取得すると、ステップをステップS16に移行させる。
或いは、ジョイスティックレバー10の傾斜操作の代わりに上述の別の操作手段が操作される場合には、操船制御装置15は、ステップS15において、ジョイスティックレバー10の回転方向と回転量とに対応した信号とともに、上述の別の操作手段の操作に対応した信号を所定時間ごとに取得してもよい。取得した後には、操船制御装置15は、ステップをステップS16に移行させる。
つまり、操船制御装置15は、ジョイスティックレバー10の回転方向と回転量とに対応した信号とともに、前方向を示す矢印へのタッチ操作に対応した信号と後方向を示す矢印へのタッチ操作に対応した信号とを取得することも可能である。或いは、操船制御装置15は、ジョイスティックレバー10の回転方向と回転量とに対応した信号とともに、船舶100を前進させるボタンの操作に対応した信号と船舶100を後進させるボタンの操作に対応した信号とを取得してもよい。
ステップS16において、操船制御装置15は、ジョイスティックレバー10の回転方向、回転量、傾斜方向及び傾斜角度に応じて、左舷と右舷との前後進プロペラ4の間で推力差ΔTnが生じるように、左舷の前後進プロペラ4を推力Tpnが生じる回転数である回転数Npnで回転させ、右舷の前後進プロペラ4を推力Tsnが生じる回転数である回転数Nsnで回転させ、回転数差ΔNnが生じている状態で、ステップをステップS14に移行させる。
操船制御装置15は、ステップS14~ステップS16の各ステップを、ステップS14においてYesと判定するまで繰り返す。ステップS14~ステップS16の各ステップが繰り返される間は、ジョイスティックレバー10の回転方向、回転量、傾斜方向及び傾斜角度に対して、所望の回頭がまだ得られていないと操縦者が判断している。つまり、ステップS14~ステップS16の各ステップが繰り返される間にステップS15において操船制御装置15が取得する信号は、操縦者が意図しない回頭中心を中心とする回頭の動作が表れる推力(又は、船体1の前後進の動作が表れる推力を発生させる信号)を発生させる信号であるといえる。
一方、ジョイスティックレバー10の回転方向及び回転量に対して、又は、回転方向、回転量、傾斜方向及び傾斜角度に対して、所望の回頭が得られたと操縦者が判断する場合に校正実行スイッチ10aが操作されると、操船制御装置15がステップS14においてYesと判定することができる。つまり、ステップS14において操船制御装置15がYesと判定する場合に、ステップS12又はステップS15において操船制御装置15が取得した信号は、所望の回頭が得られる推力を発生させる信号、即ち、操縦者が意図する回頭中心Ciを中心とする回頭の動作が表れる推力を発生させる信号であるといえる。
このように、ステップS12~ステップS16において、操船装置7は、ジョイスティックレバー10の回転操作の回転量に応じて左舷及び右舷の前後進プロペラ4をそれぞれ回転させ、所望の回頭中心Ciを中心にして船舶100が回頭するように操作されるジョイスティックレバー10の傾斜操作の傾斜角度に応じて左舷及び右舷の前後進プロペラ4の各回転数を変更させる。
ステップS17において、操船制御装置15は、校正実行スイッチ10aからの信号を取得すると、ステップをステップS18に移行させる。
ステップS18において、操船制御装置15は、ステップS14の判定時点、又は、ステップS17の取得時点において発生している左舷の前後進プロペラ4の回転数Npnについて、当該時点における傾斜操作の傾斜角度に対応する左舷の前後進プロペラの回転数Npniを、補正値として設定する。また、操船制御装置15は、ステップS14の判定時点、又は、ステップS17の取得時点において発生している右舷の前後進プロペラ4の回転数Nsnについて、当該時点における傾斜操作の傾斜角度に対応する右舷の前後進プロペラの回転数Nsniを、補正値として設定する。
言い換えると、操船制御装置15は、左舷と右舷との前後進プロペラ4の各回転数Npn・Nsnによって発生する推力のうち、当該時点における傾斜操作の傾斜角度に対応する左舷と右舷との前後進プロペラの各回転数Npni・Nsniによって発生する推力を、回頭中心の移動のための補正係数Cp・Csとして設定する。このように、操船装置7は、ジョイスティックレバー10の回転操作と傾斜操作との組み合わせによって、所望の回頭に必要な左舷及び右舷の前後進プロペラ4の各回転数Npn・Nsnによる推力を発生させたうえで、適切な補正係数Cp・Csを設定する。操船制御装置15は、ステップS18に続いて、ステップをステップS19に移行させる。
ステップS19において、操船制御装置15は、ステップS14の判定時点又はステップS17の取得時点におけるジョイスティックレバー10の回転操作の回転量、若しくは、当該時点におけるジョイスティックレバー10の回転操作の回転量に対応する左舷と右舷との前後進プロペラの回転数Npnr・Nsnrを、設定した各補正係数Cp・Csとともに記憶し、ステップを終了する。
なお、ステップS15とステップS16とを経由せずに、ステップS11~S14を経由した後にステップS17にステップが移行した場合には、ステップS19において、ステップS12の信号の取得時点又はステップS14の判定時点におけるジョイスティックレバー10の回転操作の回転量に対応する左舷の前後進プロペラ4の回転数Np1及び右舷の前後進プロペラ4の回転数Ns1による推力を、各補正係数Cp・Csとしてジョイスティックレバー10の当該回転量とともに記憶する。
回頭用の校正が済んだ後には、ジョイスティックレバー10が回転操作されると、操船装置7は、各補正係数Cp・Csを用いて、回転操作の回転量に応じた左舷及び右舷の前後進プロペラ4の各回転数に応じた推力を発生させる。具体的には、操船制御装置15は、ジョイスティックレバー10の回転操作の任意の回転量に対応する左舷の前後進プロペラ4の校正前の回転数に、定量の補正係数Cpを含む関数を加算することにより、左舷の前後進プロペラ4の回転数を変化させる。また、操船制御装置15は、ジョイスティックレバー10の回転操作の任意の回転量に対応する右舷の前後進プロペラ4の校正前の回転数に、定量の補正係数Csを含む関数を加算することにより、右舷の前後進プロペラ4の回転数を変化させる。
言い換えると、操船制御装置15は、ジョイスティックレバー10の回転操作の任意の回転量に対応する左舷と右舷との前後進プロペラ4の校正前の回転数による各推力に、補正係数Cp・Csを含む関数をそれぞれベクトル加算することにより、左舷と右舷との前後進プロペラ4の推力を変化させる。このように、操船制御装置15は、補正係数Cp・Csを用いることにより、ジョイスティックレバー10の回転量の変化に応じて、左舷及び右舷の前後進プロペラ4の各回転数を変化させることができる。
なお、ステップS15とステップS16とを経由せずに、ステップS11~S14を経由した後にステップS17にステップが移行した場合には、操船制御装置15は、ジョイスティックレバー10の回転操作の各回転量に対応する左舷及び右舷の前後進プロペラ4の校正前の各回転数を引き続き使用する。
なお、回頭の校正は、左舷及び右舷の前後進推進比を変更することによっても対応できる。なお、前後進推進比とは、前進側の推力に対する後進側の推力の比のことをいう。
具体的には、所望の回頭中心が船舶100の重心Gの位置よりも船頭側にある場合には、船舶100のその場回頭のための左舷と右舷との前後進プロペラ4の各回転数に対して、後進側推力を発生させている前後進プロペラの推力を増大させる若しくは前進側推力を発生させている前後進プロペラの推力を減少させることによって、前後進推進比を変更する。これにより、船舶100自体が前後へ移動することなく、実際の回頭中心だけが重心Gの位置から船頭側へ移動することができる。一方、所望の回頭中心が船舶100の重心Gの位置よりも船尾側にある場合には、船舶100のその場回頭のための左舷と右舷との前後進プロペラ4の各回転数に対して、後進側推力を発生させている前後進プロペラの推力を減少させる若しくは前進側推力を発生させている前後進プロペラの推力を増大させることによって、前後進推進比を変更する。これにより、船舶100自体が前後へ移動することなく、実際の回頭中心だけが重心Gの位置から船頭側へ移動することができる。
図7(A)に示すように、船舶100は、ジョイスティックレバー10のレバー軸周りの回転操作により回頭する場合、ジョイスティックレバー10の時計回り又は反時計回りの回転量に応じた左舷の前後進プロペラ4による推力T1cと右舷の前後進プロペラ4による推力T2cとによって、回転操作方向に応じて回頭する。
重心Gの位置から意図する回頭中心(例えば、より船頭側)への実際の回頭中心の移動、若しくは、より船尾側への実際の回頭中心の移動のためには、回転操作とともに、意図する回頭中心を中心にして船舶100が回頭する傾斜角度でジョイスティックレバー10が傾斜操作される。
図7(B)に示すように、より船頭側への実際の回頭中心の移動のための傾斜操作がジョイスティックレバー10の回転操作に加えられると、一方の舷にだけ推力が追加される場合と同様の効果として、回頭のための左舷と右舷との前後進プロペラ4による推力T1c・T2c(図7(A)参照)に補正量Ffがベクトル加算されて、ジョイスティックレバー10の傾斜操作が回転操作に追加される前後において、左舷と右舷との前後進プロペラ4による各推力の他に船体1の回頭モーメントも変化する。
前後進推進比の変更のために、このような補正量Ffが左舷の前後進プロペラ4の推力T1cにベクトル加算されることにより、図7(C)に示すように、左舷の前後進プロペラ4は推力T1cから変化した推力T1eを発生させる。このように変化した前後進推進比によれば、船舶100は、操縦者が意図する回頭中心Ciを中心にして回頭できる。なお、左舷の前後進プロペラ4の推力T1cに補正量Ffが加算される代わりに、右舷の前後進プロペラ4の推力T2cに補正量Ffが減算されることでもよい。この場合も前後進推進比が変更され、操縦者が意図する回頭中心Ciを中心にして回頭することができる。
操船制御装置15は、変更させた前後進推進比に応じて発生する推力(即ち、補正量Ff)を補正係数として設定し、この補正係数を記憶する。回頭用の校正が済んだ後には、操船制御装置15は、ジョイスティックレバー10の回転操作の任意の回転量に対応する左舷と右舷との前後進プロペラ4の校正前の回転数による各推力の何れか一方に、この補正係数を含む関数をベクトル加算することにより、一方の前後進プロペラ4の推力を変化させる。
なお、船舶100を前進又は後進させる操作は、ジョイスティックレバー10の傾斜操作に限定されず、上述の操作手段による所定操作であってもよい。
以上の各構成によれば、乗船する操縦者ごとに所望の回頭が得られるように、回頭用の校正を容易に実施できる。そのため、各操縦者は、船舶100の重心Gの位置、船体1の形状等を認識していなくても、容易に所望の回頭を得ることができる。
本発明は、操船装置に利用可能である。
1 船体
2 エンジン
4 前後進プロペラ
4a プロペラシャフト
6 サイドスラスタ
7 操船装置
10 ジョイスティックレバー
10a 校正実行スイッチ(操作具)
15 操船制御装置
100 船舶
2 エンジン
4 前後進プロペラ
4a プロペラシャフト
6 サイドスラスタ
7 操船装置
10 ジョイスティックレバー
10a 校正実行スイッチ(操作具)
15 操船制御装置
100 船舶
Claims (3)
- 左舷のプロペラシャフトに連結されて推力を発生させる左舷の前後進プロペラと、右舷のプロペラシャフトに連結されて推力を発生させる右舷の前後進プロペラと、が設けられる船舶に搭載される操船装置であって、
回転操作自在且つ傾斜操作自在に構成されて前記船舶の移動速度と移動方向とを決定するためのジョイスティックレバーを備え、
回頭用の校正時に、前記ジョイスティックレバーの回転操作によって前記左舷の前後進プロペラ及び前記右舷の前後進プロペラをそれぞれ回転させ、前記ジョイスティックレバーの傾斜操作によって前記左舷の前後進プロペラの前後進推進比若しくは前記右舷の前後進プロペラの前後進推進比、又は、前記左舷の前後進プロペラ及び前記右舷の前後進プロペラの各回転数を変更させ、
校正実行用の操作具が操作される場合には、変更させた前記前後進推進比に応じて発生する推力を補正係数として設定する、或いは、変更させた前記左舷の前後進プロペラ及び前記右舷の前後進プロペラの各回転数によって発生する推力のうち、前記傾斜操作による前記左舷の前後進プロペラの推力及び前記右舷の前後進プロペラの推力を補正係数として設定することによって、回頭用の校正を実施する、操船装置。 - 左舷のプロペラシャフトに連結されて推力を発生させる左舷の前後進プロペラと、右舷のプロペラシャフトに連結されて推力を発生させる右舷の前後進プロペラと、が設けられる船舶に搭載される操船装置であって、
回転操作自在に構成されて前記船舶の回頭速度と回頭方向とを決定するためのジョイスティックレバーと、
前記船舶を前進又は後進させるための操作手段と、
を備え、
回頭用の校正時に、前記ジョイスティックレバーの回転操作によって前記左舷の前後進プロペラ及び前記右舷の前後進プロペラをそれぞれ回転させ、前記操作手段の所定操作によって前記左舷の前後進プロペラの前後進推進比若しくは前記右舷の前後進プロペラの前後進推進比、又は、前記左舷の前後進プロペラ及び前記右舷の前後進プロペラの各回転数を変更させ、
校正実行用の操作具が操作される場合には、変更させた前記前後進推進比に応じて発生する推力を補正係数として設定する、或いは、変更させた前記左舷の前後進プロペラ及び前記右舷の前後進プロペラの各回転数によって発生する推力のうち、前記所定操作による前記左舷の前後進プロペラの推力及び前記右舷の前後進プロペラの推力を補正係数として設定することによって、回頭用の校正を実施する、操船装置。 - 前記ジョイスティックレバーの操作が開始される場合に、前記船舶の舵を中立位置に保持させる、ことを特徴とする請求項1又は請求項2に記載の操船装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/090,480 US10787238B2 (en) | 2016-03-31 | 2016-10-13 | Ship handling device |
| EP16897019.2A EP3437986B1 (en) | 2016-03-31 | 2016-10-13 | Method of using a ship handling device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016073355A JP6430988B2 (ja) | 2016-03-31 | 2016-03-31 | 操船装置 |
| JP2016-073355 | 2016-03-31 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017168802A1 true WO2017168802A1 (ja) | 2017-10-05 |
Family
ID=59963816
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/080442 WO2017168802A1 (ja) | 2016-03-31 | 2016-10-13 | 操船装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10787238B2 (ja) |
| EP (1) | EP3437986B1 (ja) |
| JP (1) | JP6430988B2 (ja) |
| WO (1) | WO2017168802A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019081405A1 (en) * | 2017-10-23 | 2019-05-02 | Rolls-Royce Ab | NAVIGATION SYSTEM WITH INDEPENDENT LATERAL AND LONGITUDINAL PUSH CONTROL |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7018008B2 (ja) | 2018-10-25 | 2022-02-09 | ヤンマーパワーテクノロジー株式会社 | パネル取付器具及び船舶用の操作パネル構造 |
| US10926855B2 (en) * | 2018-11-01 | 2021-02-23 | Brunswick Corporation | Methods and systems for controlling low-speed propulsion of a marine vessel |
| JP7060491B2 (ja) * | 2018-11-02 | 2022-04-26 | ヤンマーパワーテクノロジー株式会社 | 船舶用ハイブリッドシステム |
| EP3981682A4 (en) * | 2019-06-06 | 2023-07-26 | NHK Spring Co., Ltd. | SELF-SETTING DEVICE, SELF-SETTING METHOD AND PROGRAM |
| NL2025284B1 (en) * | 2020-04-06 | 2021-10-25 | Demcon Unmanned Systems B V | Watercraft comprising a positioning system |
| CN115111495A (zh) * | 2022-07-15 | 2022-09-27 | 中船黄埔文冲船舶有限公司 | 一种船用操纵杆遥控站旋转支架 |
| JP2024060163A (ja) | 2022-10-19 | 2024-05-02 | ヤマハ発動機株式会社 | 船舶推進システムおよび船舶 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS628900A (ja) * | 1985-07-06 | 1987-01-16 | Tokyo Keiki Co Ltd | 操船装置 |
| JP2010126085A (ja) * | 2008-11-28 | 2010-06-10 | Yamaha Motor Co Ltd | 操船支援装置およびそれを備えた船舶 |
| JP2012185154A (ja) * | 2011-02-14 | 2012-09-27 | Dgs Computer:Kk | Gps信号による移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラム |
| JP2013014173A (ja) * | 2011-06-30 | 2013-01-24 | Yanmar Co Ltd | 船舶操船装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2801174B2 (ja) * | 1996-09-02 | 1998-09-21 | 日本操舵システム株式会社 | 電気推進装置と二枚舵装置とからなる船舶推進装置における船速切換方法 |
| PT1187760E (pt) * | 1999-06-24 | 2004-09-30 | Siemens Ag | Sistema de propulsao e pilotagem para navios |
| JP4666152B2 (ja) * | 2005-07-20 | 2011-04-06 | トヨタ自動車株式会社 | 船艇の操船装置 |
| WO2007030040A1 (en) * | 2005-09-06 | 2007-03-15 | Cpac Systems Ab | A method for arrangement for calibrating a system for controlling thrust and steering in a watercraft |
| JP5337722B2 (ja) * | 2010-01-07 | 2013-11-06 | ヤマハ発動機株式会社 | 船舶用推進制御装置および船舶 |
| JP5289485B2 (ja) * | 2011-03-07 | 2013-09-11 | 三菱電機株式会社 | 多機掛け船舶推進機の制御装置 |
| EP2727819B1 (en) | 2011-06-28 | 2019-09-04 | Yanmar Co., Ltd. | Ship steering device and ship steering method |
| JP5944274B2 (ja) * | 2012-08-31 | 2016-07-05 | ヤンマー株式会社 | アウトドライブ装置用操船システム |
-
2016
- 2016-03-31 JP JP2016073355A patent/JP6430988B2/ja active Active
- 2016-10-13 US US16/090,480 patent/US10787238B2/en active Active
- 2016-10-13 WO PCT/JP2016/080442 patent/WO2017168802A1/ja active Application Filing
- 2016-10-13 EP EP16897019.2A patent/EP3437986B1/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS628900A (ja) * | 1985-07-06 | 1987-01-16 | Tokyo Keiki Co Ltd | 操船装置 |
| JP2010126085A (ja) * | 2008-11-28 | 2010-06-10 | Yamaha Motor Co Ltd | 操船支援装置およびそれを備えた船舶 |
| JP2012185154A (ja) * | 2011-02-14 | 2012-09-27 | Dgs Computer:Kk | Gps信号による移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラム |
| JP2013014173A (ja) * | 2011-06-30 | 2013-01-24 | Yanmar Co Ltd | 船舶操船装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019081405A1 (en) * | 2017-10-23 | 2019-05-02 | Rolls-Royce Ab | NAVIGATION SYSTEM WITH INDEPENDENT LATERAL AND LONGITUDINAL PUSH CONTROL |
| CN111465554A (zh) * | 2017-10-23 | 2020-07-28 | 康斯伯格海事瑞典股份公司 | 独立控制横向和纵向推力的航行系统 |
| US11526169B2 (en) | 2017-10-23 | 2022-12-13 | Kongsberg Maritime Sweden Ab | Navigation system with independent control of lateral and longitudinal thrust |
Also Published As
| Publication number | Publication date |
|---|---|
| US10787238B2 (en) | 2020-09-29 |
| JP2017178290A (ja) | 2017-10-05 |
| JP6430988B2 (ja) | 2018-11-28 |
| EP3437986A4 (en) | 2019-04-24 |
| EP3437986B1 (en) | 2020-06-03 |
| US20190112021A1 (en) | 2019-04-18 |
| EP3437986A1 (en) | 2019-02-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6430988B2 (ja) | 操船装置 | |
| JP5481059B2 (ja) | 操船支援装置およびそれを備えた船舶 | |
| JP5133637B2 (ja) | 船舶 | |
| WO2016063610A1 (ja) | 操船装置 | |
| EP1775212A2 (en) | Method for maneuvering a marine vessel and marine vessel | |
| EP1775211A2 (en) | Method for positioning a marine vessel and marine vessel | |
| WO2013001875A1 (ja) | 船舶操船装置及び船舶の操船方法 | |
| JP2006001432A (ja) | 小型船舶用ステアリング装置 | |
| JP5151157B2 (ja) | バウスラスタを有する2軸2舵船の推力制御方法及び装置 | |
| JP6771043B2 (ja) | 船舶を操作する方法及び制御装置 | |
| JP6596700B2 (ja) | 操船装置 | |
| JP6421111B2 (ja) | 操船装置 | |
| JP6250520B2 (ja) | 操船装置 | |
| EP3406516B1 (en) | Ship maneuvering device and ship provided therewith | |
| JP2014076755A (ja) | 船舶の制御システム、船舶の制御方法、プログラム | |
| JP2013014173A (ja) | 船舶操船装置 | |
| JP6379388B2 (ja) | 操船装置 | |
| JP6876816B2 (ja) | 操船支援装置 | |
| WO2017135304A1 (ja) | ジョイスティックコントロール装置 | |
| JP2002234495A (ja) | 操船装置 | |
| JP6262633B2 (ja) | 操船装置 | |
| JP2004352007A (ja) | 航走体の操縦方法及び操縦装置 | |
| JP2022146792A (ja) | 操船システム及び船舶 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2016897019 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2016897019 Country of ref document: EP Effective date: 20181031 |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16897019 Country of ref document: EP Kind code of ref document: A1 |