WO2017126102A1 - 運転評価装置、運転評価方法、基準データ提供方法、基準データ提供装置及び基準データ提供プログラム - Google Patents
運転評価装置、運転評価方法、基準データ提供方法、基準データ提供装置及び基準データ提供プログラム Download PDFInfo
- Publication number
- WO2017126102A1 WO2017126102A1 PCT/JP2016/051839 JP2016051839W WO2017126102A1 WO 2017126102 A1 WO2017126102 A1 WO 2017126102A1 JP 2016051839 W JP2016051839 W JP 2016051839W WO 2017126102 A1 WO2017126102 A1 WO 2017126102A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- reference data
- vehicle
- driving
- evaluation
- score
- Prior art date
Links
- 238000011156 evaluation Methods 0.000 title claims abstract description 101
- 238000000034 method Methods 0.000 title claims description 31
- 230000004044 response Effects 0.000 claims abstract description 6
- 239000000446 fuel Substances 0.000 claims description 29
- 230000008569 process Effects 0.000 claims description 19
- 238000004891 communication Methods 0.000 claims description 12
- 230000008859 change Effects 0.000 claims description 5
- 230000001960 triggered effect Effects 0.000 claims description 2
- 238000010295 mobile communication Methods 0.000 description 18
- 230000005540 biological transmission Effects 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000012854 evaluation process Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 239000000284 extract Substances 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000007619 statistical method Methods 0.000 description 1
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W40/09—Driving style or behaviour
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/10—Input arrangements, i.e. from user to vehicle, associated with vehicle functions or specially adapted therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/22—Display screens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/29—Instruments characterised by the way in which information is handled, e.g. showing information on plural displays or prioritising information according to driving conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/85—Arrangements for transferring vehicle- or driver-related data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0129—Traffic data processing for creating historical data or processing based on historical data
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/09626—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages where the origin of the information is within the own vehicle, e.g. a local storage device, digital map
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/167—Vehicle dynamics information
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/169—Remaining operating distance or charge
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/174—Economic driving
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/18—Information management
- B60K2360/188—Displaying information using colour changes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/589—Wireless data transfers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/592—Data transfer involving external databases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/26—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using acoustic output
- B60K35/265—Voice
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/50—Instruments characterised by their means of attachment to or integration in the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0043—Signal treatments, identification of variables or parameters, parameter estimation or state estimation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/10—Historical data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/55—External transmission of data to or from the vehicle using telemetry
Definitions
- the present invention relates to a driving evaluation device, a driving evaluation method, a reference data providing method, a reference data providing device, and a reference data providing program for evaluating a driving technique of a vehicle.
- Patent Document 1 In order to evaluate the driving technology of a vehicle, a driving evaluation device as described in JP 2010-231776 A (Patent Document 1) has been proposed.
- a past evaluation result for example, the highest score
- an evaluation result corresponding to the driving state of the vehicle is obtained, and this is presented to the driver.
- the present invention provides a driving evaluation device, a driving evaluation method, a reference data providing method, a reference data providing device, and a reference data providing program that can determine whether or not there is room for improving driving technology. Objective.
- the driving evaluation device has a communication device, a display device, and a control device for wireless communication with an external device. Then, the control device requests the external device for reference data that can specify the distribution state of the past evaluation results related to the evaluation target, refers to the reference data returned from the external device, and evaluates according to the driving state of the vehicle The result is obtained in real time, and the evaluation result is displayed on the display device.
- a control device including a communication device and a display device for wireless communication with an external device requests the external device for reference data that can specify the distribution state of past evaluation results related to the evaluation target.
- a control apparatus calculates
- a computer equipped with storage stores evaluation results according to the driving state of the vehicle transmitted from the vehicle-mounted device in the storage, and the distribution status of the evaluation results can be specified from multiple evaluation results stored in the storage Basic reference data is generated. Then, the computer returns the reference data in response to the request for the reference data from the vehicle-mounted device.
- FIG. 1 shows an example of a driving evaluation system for evaluating driving technology of a vehicle.
- the driving evaluation system 100 includes an in-vehicle device 300 mounted on a vehicle 200 such as a truck, a server computer 400 installed in a service center of an application provider, a personal computer 500 installed in an office such as a transportation company, Have The server computer 400 is an example of an external device.
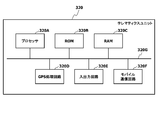
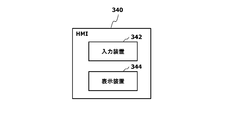
- the vehicle-mounted device 300 includes a telematics unit 320 for using a telematics service, and an HMI (Human Machine Interface) 340 that provides an input / output function for the telematics unit 320.
- HMI Human Machine Interface
- the telematics unit 320 includes a GPS antenna 322 for receiving signals from a GPS (Global Positioning System) satellite 600 and a mobile communication antenna 324 for wireless communication with the server computer 400.
- the telematics unit 320 includes a processor 320A such as a CPU (Central Processing Unit), a ROM (Read Only Memory) 320B storing a control program, and a RAM serving as a temporary storage area.
- a processor 320A such as a CPU (Central Processing Unit), a ROM (Read Only Memory) 320B storing a control program, and a RAM serving as a temporary storage area.
- (Random Access Memory) 320C a GPS processing circuit 320D, an input / output circuit 320E, a mobile communication circuit 320F, and a bus 320G for interconnecting them are incorporated.
- GPS processing circuit 320D and the mobile communication circuit 320F may be connected to each other via the input / output circuit 320E instead of being built in the telematics unit 320.
- a microcomputer including the processor 320A, the ROM 320B, the RAM 320C, the input / output circuit 320E, and the bus 320G is an example of the control device.
- GPS processing circuit 320D measures the current position of vehicle 200 by processing the signal received by GPS antenna 322.
- the input / output circuit 320E inputs digital signals or analog signals from various sensors and switches, and outputs digital or analog drive signals to external devices.
- the mobile communication circuit 320F communicates wirelessly with the server computer 400 via the mobile communication antenna 324. Note that the mobile communication circuit 320F and the mobile communication antenna 324 are examples of communication devices.
- the HMI 340 includes an input device 342 such as a switch or button operated by a driver or the like, and a display device 344 such as a liquid crystal monitor that displays information to the driver or the like.
- an input device 342 such as a switch or button operated by a driver or the like
- a display device 344 such as a liquid crystal monitor that displays information to the driver or the like.
- driver information that can identify the driver of the vehicle 200, the weight of the vehicle 200 (such as a loaded state), and the like can be set.
- the HMI 340 may include a touch screen having both functions instead of the input device 342 and the display device 344.
- the HMI 340 can also notify various information by voice.
- the telematics unit 320 and the HMI 340 are mounted in a predetermined location of the vehicle 200 in a state where they are electrically connected.
- a GPS antenna 322 and a mobile communication antenna 324 are attached to the upper portion of the vehicle 200, for example, the upper surface of the cabin in a state of being electrically connected to the telematics unit 320.
- the telematics unit 320 is connected to a CAN (Controller Area Network) 360, which is an example of an in-vehicle network, so that signals from various sensors and switches can be indirectly input via the input / output circuit 320E. ing. Accordingly, the telematics unit 320 can read various signals flowing through the CAN 360 at an arbitrary time.
- CAN Controller Area Network
- the server computer 400 includes a processor 400A such as a CPU, a ROM 400B that stores a control program, a RAM 400C that serves as a temporary storage area, and an input / output circuit 400D that is connected to an external device. And a storage 400E such as a hard disk drive and a bus 400F for interconnecting them.
- a processor 400A such as a CPU
- ROM 400B that stores a control program
- RAM 400C that serves as a temporary storage area
- an input / output circuit 400D that is connected to an external device.
- a storage 400E such as a hard disk drive and a bus 400F for interconnecting them.
- a database is built that stores a plurality of past scores (evaluation results) in a state associated with at least a driver, a vehicle, a travel area, a vehicle weight, and a travel time zone. Therefore, with respect to past scores stored in the database, a score that matches a predetermined condition can be extracted using at least one of the driver, the vehicle, the travel area, the vehicle weight, and the travel time zone as parameters. Details of the items to be evaluated will be described later.
- the personal computer 500 is communicably connected to the server computer 400 via the Internet 700, which is an example of a computer network, in order to use a service provided by an application provider.
- a web browser is installed in the personal computer 500 in advance so as to enable various settings regarding the service provided by the application provider.
- the telematics unit 320 of the vehicle-mounted device 300 can specify the distribution state of past evaluation results related to the evaluation target with respect to the server computer 400 when the ignition switch is turned from OFF to ON. Requesting standard data. Then, the telematics unit 320 refers to the reference data returned from the server computer 400, obtains an evaluation result corresponding to the driving state of the vehicle 200 in real time, and displays the evaluation result on the display device 344 of the HMI 340.
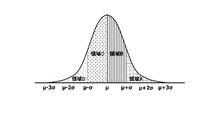
- the reference data can include, for example, an average value ⁇ and a standard deviation value ⁇ that can represent past evaluation results as a normal distribution.
- the server computer 400 receives the evaluation result according to the driving state of the vehicle 200 transmitted from the telematics unit 320 of the vehicle-mounted device 300 in the storage 400E when the ignition switch of the vehicle 200 is switched from ON to OFF. Store. Further, the server computer 400 generates reference data that can specify the distribution state from a plurality of evaluation results stored in the storage 400E, that is, past evaluation results. Then, the server computer 400 returns the reference data in response to the request for the reference data from the in-vehicle device 300.
- the operation manager of the transportation company Prior to evaluating the driving technology of the vehicle 200, the operation manager of the transportation company operates the personal computer 500 installed in the office, and displays data selection conditions for narrowing down past evaluation results, which are displayed to the driver. Set items and guidance.
- FIG. 6 shows a procedure in which an operation manager or the like sets data selection conditions, display items, and presence / absence of guidance.
- the operation manager makes various settings, but for example, other workers may make various settings under the management of the operation manager.
- step 1 the operation manager interacts with the setting screen displayed on the personal computer 500 to drive the vehicle 200, which is one of the data selection conditions. Set up a person.
- the operation manager may not set the driver.
- step 2 the operation manager interacts with the setting screen displayed on the personal computer 500 to set a vehicle (for example, vehicle identification information), which is one of the data selection conditions.
- vehicle for example, vehicle identification information
- the operation manager may not set the vehicle.
- step 3 the operation manager interacts with the setting screen displayed on the personal computer 500 to set a travel area (travel route) which is one of the data selection conditions.
- a travel area travel route
- the operation manager may not set the travel area.
- step 4 the operation manager interacts with the setting screen displayed on the personal computer 500 to set the vehicle weight, which is one of the data selection conditions.
- the operation manager does not need to set the vehicle weight.
- step 5 the operation manager interacts with the setting screen displayed on the personal computer 500 to set a travel time zone, which is one of the data selection conditions.
- the operation manager may not set the travel time zone.
- step 6 the operation manager interacts with the setting screen displayed on the personal computer 500 to set display items to be displayed to the driver of the vehicle 200.
- the display item for example, current fuel consumption, average fuel consumption, minimum fuel consumption, maximum fuel consumption, target score, and the like can be adopted.
- step 7 the operation manager interacts with the setting screen displayed on the personal computer 500 to set the presence / absence of guidance for notifying the change in the evaluation result according to the driving state of the vehicle 200.
- the presence / absence of the guidance for example, “present” or “absent” may be set as default.
- Step 8 the operation manager interacts with the setting screen displayed on the personal computer 500 to determine the data selection conditions, display items, and presence / absence of guidance set in Steps 1 to 7. Then, the personal computer 500 reads each item set on the setting screen, and transmits data selection conditions, display items, and presence / absence of guidance to the server computer 400 via the Internet 700.
- the server computer 400 receives data selection conditions, display items, and presence / absence of guidance from the personal computer 500, the server computer 400 stores them in the storage 400E in a state of being associated with the service user. Therefore, the server computer 400 can specify the data selection conditions, display items, and presence / absence of guidance set by the service user, for example, using the login information of the service user.
- FIG. 7 shows an example of the driving evaluation initialization process executed by the telematics unit 320 of the vehicle-mounted device 300 when the ignition switch of the vehicle 200 is switched from OFF to ON, that is, when the vehicle-mounted device 300 is activated. Indicates.
- step 11 the processor 320A of the telematics unit 320 requests reference data from the server computer 400 via the mobile communication circuit 320F and the mobile communication antenna 324.
- step 12 it is determined whether the processor 320A of the telematics unit 320 has received the reference data from the server computer 400 via the mobile communication circuit 320F and the mobile communication antenna 324. If the processor 320A of the telematics unit 320 determines that the reference data has been received, the process proceeds to step 13 (Yes). On the other hand, if it is determined that the reference data is not received, the processor 320A of the telematics unit 320 waits until the reference data is received (No).
- the processor 320A of the telematics unit 320 stores, for example, the reference data in the RAM 320C so that the reference data can be referred to at an arbitrary time.
- the processor 320A of the telematics unit 320 can also store the reference data in the ROM 320B, for example, so that the reference data is not lost even if there is an instantaneous interruption of the battery.
- the processor 320A of the telematics unit 320 can specify the distribution state of past evaluation results related to the evaluation target with respect to the server computer 400. Request data. Then, when the reference data is returned from the server computer 400, the processor 320A of the telematics unit 320 stores it in the RAM 320C. Accordingly, the processor 320A of the telematics unit 320 can refer to the reference data at an arbitrary time.
- FIG. 8 shows an example of a driving evaluation process that the telematics unit 320 of the vehicle-mounted device 300 repeatedly executes every predetermined time after the initialization process is completed.
- the processor 320 ⁇ / b> A of the telematics unit 320 acquires various data related to the vehicle 200.
- the data of the vehicle 200 for example, positioning information, fuel consumption from start-up, travel distance, fuel consumption during idling, idling time, travel distance in the green zone, travel time in the green zone, Fuel consumption during green zone driving, cruise control usage time, coasting distance, coasting traveling time, top gear usage time, fuel consumption during top gear usage, etc.
- One data can be adopted.
- the processor 320A of the telematics unit 320 measures the current position of the vehicle 200 by processing the GPS satellite signal received by the GPS antenna 322. Further, the processor 320A of the telematics unit 320 reads various signals flowing through the CAN 360, and processes these signals as necessary, so that the fuel consumption from the start, the travel distance, and the fuel consumption during idling. , Idling time, green zone travel distance, green zone travel time, fuel consumption during green zone travel, cruise control use time, repulsion travel distance, repulsion travel time, top gear use time, top Obtain the fuel consumption while using the gear.
- the processor 320A of the telematics unit 320 refers to, for example, reference data stored in the RAM 320C and calculates a score indicating an evaluation result according to the driving state of the vehicle 200.
- the driving state of the vehicle 200 the driving state of the engine and the transmission, the vehicle speed state, the idling state, the pre-reading driving state, etc. in one driving cycle can be employed. .
- “one driving cycle” means one run from when the ignition switch is turned on to when it is turned off.
- automatic transmission and eco mode ON usage rate usage time / engine operation time
- Manual shift usage rate use time / total engine operation time
- Usage rate of automatic transmission and eco-mode OFF usage time / total engine operation time
- Top gear usage rate travel distance / total travel distance
- Green zone driving rate fuel consumption / total fuel consumption
- Vehicle speed condition / Economic vehicle speed travel rate (fuel consumption when vehicle speed is below threshold / total fuel consumption) ⁇ Use rate of auto cruise (travel distance / total travel distance)
- the processor 320A of the telematics unit 320 calculates, for example, a score indicating the position where the driving state is located with respect to the distribution state of the score specified by the reference data, using a known statistical method. .
- a deviation value in a normal distribution can be employed.
- the processor 320A of the telematics unit 320 determines a score area including a score based on the average value ⁇ and the standard deviation value ⁇ of the reference data for each driving state of the vehicle 200 to be evaluated. That is, as shown in FIG. 9, the processor 320A of the telematics unit 320 has a region A where the score is greater than or equal to ⁇ + ⁇ , a region B where the score is greater than or equal to ⁇ and less than ⁇ + ⁇ , and a region where the score is greater than or equal to ⁇ and less than ⁇ . C. It is determined whether the region D is a region D having a score less than ⁇ .
- the score area is not limited to the four sections of areas A to D, and may be five sections or more.
- the processor 320A of the telematics unit 320 sets a target score corresponding to the score areas A to D for each driving state of the vehicle 200. That is, the processor 320A of the telematics unit 320 sets the target score to 100 if the score is in the region A, sets the target score to ⁇ + ⁇ if the score is in the region B, and sets the target score to ⁇ if the score is in the region C or D. Set. In short, the processor 320A of the telematics unit 320 sets a region where the score is better as a target score so that the average value ⁇ is at least.
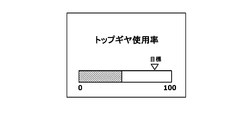
- step 25 the processor 320A of the telematics unit 320 displays the current score and the target score on the display device 344 of the HMI 340, respectively, as shown in FIGS.
- the current score is displayed in a bar graph obtained by projecting the distribution state of the score specified from the reference data to a range of 0 to 100, for example, by changing the color.
- the target score is displayed with a triangle symbol at the top of the bar graph, for example. 10 shows the usage rate of the top gear, and FIG. 11 shows the current fuel consumption obtained by dividing the travel distance by the fuel consumption. As shown in the figure, the current fuel consumption can be displayed together with the average fuel consumption and the maximum fuel consumption.
- the processor 320A of the telematics unit 320 gives a predetermined weight to the score of each of the sub-category operating states (automatic shift and eco-mode ON usage rate, etc.) for each of the major operating states (engine and transmission operating states, etc.). You may obtain
- step 26 the processor 320A of the telematics unit 320 uses the mobile communication circuit 320F and the mobile communication antenna 324, among the various data of the vehicle 200 acquired in step 21, for example, data necessary for creating daily reports and the driver. Information or the like is transmitted to the server computer 400.
- the data required for preparation of the daily report can be set in advance by a transport company operation manager or the like.
- the driver information and the like can be specified from the operation state of the HMI 340.
- step 27 the processor 320A of the telematics unit 320 determines whether or not the score area has changed with respect to the previous driving evaluation process. If the processor 320A of the telematics unit 320 determines that the score area has changed, the process proceeds to step 28 (Yes). On the other hand, if the processor 320A of the telematics unit 320 determines that the score area does not change, the processor 320A ends the process (No).
- step 28 when there is guidance, the processor 320A of the telematics unit 320 displays guidance notifying that the score has changed on the display device 344 of the HMI 340.
- the change in score indicates, for example, that the score of the evaluation target has increased when the score area has changed in the benign direction, and the score of the evaluation object has decreased when the score area has changed in the worsening direction. Display.
- the change in score can be notified by voice or the like.
- the evaluation result corresponding to the driving state of the vehicle 200 is presented in which position of the score distribution state indicating the past evaluation result. Therefore, does the driver of the vehicle 200 have room to improve driving skills by eliminating driving in special situations such as driving in a tailwind with a score close to 100 or driving in a headwind with a score close to 0? It can be determined whether or not.
- the server computer 400 can provide the vehicle data to the operation manager of the transportation company.
- FIG. 13 shows an example of an evaluation result notification process executed by the telematics unit 320 of the vehicle-mounted device 300, triggered by a shutdown when the ignition switch of the vehicle 200 is switched from ON to OFF.
- step 31 the processor 320A of the telematics unit 320 transmits the score of each driving state to be evaluated to the server computer 400 via the mobile communication circuit 320F and the mobile communication antenna 324.
- the server computer 400 can accumulate past evaluation results by registering this score in the database.
- FIG. 14 shows an example of reference data providing processing executed by the server computer 400 when the server computer 400 receives the request for reference data.
- the storage 400E of the server computer 400 stores in advance a reference data providing program for realizing a reference data providing process and a database update process to be described later.
- the storage 400E is an example of a computer-readable recording medium that stores a reference data providing program.
- step 41 the processor 400A of the server computer 400 extracts a score suitable for the display item and the data selection condition from the past score stored in the storage 400E.
- this item is ignored and a score is extracted.
- running state can be displayed by setting a display item and data selection conditions suitably.
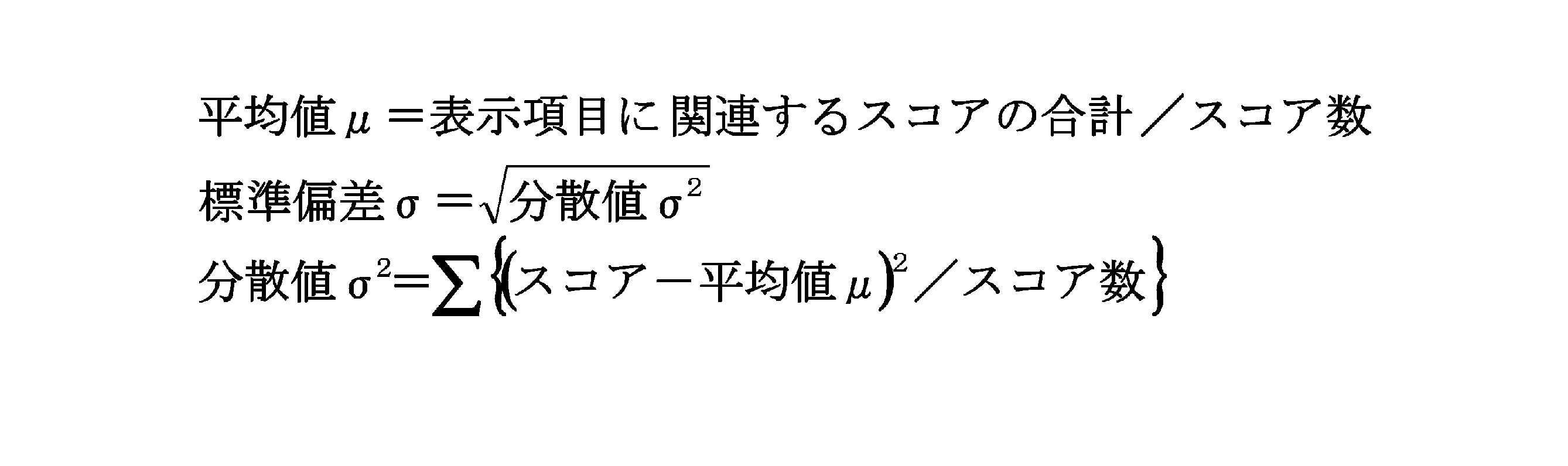
- step 42 the processor 400A of the server computer 400 generates reference data including the average value ⁇ and the standard deviation value ⁇ using the past score extracted in step 41.
- the average value ⁇ and the standard deviation value ⁇ are obtained as follows.
- step 43 the processor 400A of the server computer 400 returns the reference data, display items, and presence / absence of guidance to the vehicle-mounted device 300 of the vehicle 200.
- the server computer 400 extracts a past score corresponding to the data selection condition and the display item from the storage 400 when the reference data is requested from the vehicle-mounted device 300. Then, the server computer 400 generates reference data from the extracted past score, and returns the reference data, display items, and presence / absence of guidance to the vehicle-mounted device 300.
- the server computer 400 can provide the in-vehicle device 300 with reference data that contributes to driving evaluation. Further, the vehicle-mounted device 300 can evaluate the driving skill of the driver with reference to the reference data returned from the server computer 400, the display items, and the presence / absence of the guidance.
- FIG. 15 shows an example of database update processing executed by the server computer 400 when the server computer 400 receives vehicle data or a score.
- step 51 the processor 400A of the server computer 400 stores the received vehicle data or score in the storage 400E, and updates the database.
- the server computer 400 can update the database with the data transmitted from the vehicle-mounted device 300 of the vehicle 200. For this reason, the operation manager of a transportation company can create a daily report etc. with reference to the vehicle data stored in the database. In addition, by sequentially storing scores in the database, it is possible to enhance the scores as past evaluation results.
- the driver of the vehicle 200 can visually understand where the current driving state is in the distribution state of the past evaluation results. It is possible to determine whether or not there is room for improving driving skills.
- the driver of the vehicle 200 can improve fuel efficiency by improving the accelerator operation, the shift operation, and the like, for example.
- the server computer 400 may be provided with a function on the server computer 400 side, and the server computer 400 may be omitted. Is possible.
- vehicle 300 vehicle-mounted device 320 telematics unit (control device) 320A processor 320B ROM 320C RAM 320E I / O circuit 320F Mobile communication circuit (communication device) 320G bus 324 Mobile communication antenna (communication device) 340 HMI 344 Display device 400 Server computer (external device) 400A processor 400E storage
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Analytical Chemistry (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
- Instrument Panels (AREA)
Abstract
Description
図1は、車両の運転技術を評価する、運転評価システムの一例を示す。
・自動変速かつエコモードONの使用率(使用時間/エンジン運転時間)
・手動変速の使用率(使用時間/全エンジン運転時間)
・自動変速かつエコモードOFFの使用率(使用時間/全エンジン運転時間)
・トップギヤの使用率(走行距離/全走行距離)
・グリーンゾーンの走行率(燃料消費量/全燃料消費量)
・経済車速の走行率(車速が閾値以下で走行した燃料消費量/全燃料消費量)
・オートクルーズの使用率(走行距離/全走行距離)
・アイドリングの使用率(アイドリング時間/全エンジン運転時間)
・惰力走行の使用率(惰力走行距離/全走行距離)
・ブレーキの操作率(ブレーキ操作回数/停車回数)
200 車両
300 車載器
320 テレマティクスユニット(制御装置)
320A プロセッサ
320B ROM
320C RAM
320E 入出力回路
320F モバイル通信回路(通信装置)
320G バス
324 モバイル通信アンテナ(通信装置)
340 HMI
344 表示装置
400 サーバコンピュータ(外部装置)
400A プロセッサ
400E ストレージ
Claims (14)
- 外部装置と無線通信するための通信装置、表示装置及び制御装置を有し、
前記制御装置が、評価対象となる車両の運転状態に関する過去の評価結果の分布状態を特定可能な基準データを前記外部装置に要求し、前記外部装置から返送された前記基準データを参照して、車両の運転状態に応じた評価結果をリアルタイムに求め、当該評価結果を前記表示装置に表示するように構成された、
ことを特徴とする運転評価装置。 - 前記基準データは、評価結果を示すスコアの平均値と標準偏差値とを含み、
前記制御装置が、前記平均値と前記標準偏差値とにより特定されるスコアの分布状態において、車両の運転状態がどの位置にあるかを示すスコアを求めるように構成された、
ことを特徴とする請求項1に記載の運転評価装置。 - 前記制御装置が、1ドライビングサイクルにおける評価対象のスコアを求め、シャットダウンを契機として当該スコアを前記外部装置に送信するように構成された、
ことを特徴とする請求項1又は請求項2に記載の運転評価装置。 - 前記制御装置が、前記車両の運転状態に応じた評価結果の変化を前記表示装置に表示するように構成された、
ことを特徴とする請求項1~請求項3のいずれか1つに記載の運転評価装置。 - 前記制御装置が、前記車両の運転状態に応じた評価結果に基づく目標を設定し、当該目標を前記表示装置に表示するように構成された、
ことを特徴とする請求項1~請求項4のいずれか1つに記載の運転評価装置。 - 前記車両の運転状態は、少なくとも燃費に関する情報を含む、
ことを特徴とする請求項1~請求項5のいずれか1つに記載の運転評価装置。 - 外部装置と無線通信するための通信装置及び表示装置を備えた制御装置が、
評価対象となる車両の運転状態に関する過去の評価結果の分布状態を特定可能な基準データを前記外部装置に要求し、
前記外部装置から返送された前記基準データを参照して、車両の運転状態に応じた評価結果をリアルタイムに求め、
当該評価結果を前記表示装置に表示する、
ことを特徴とする運転評価方法。 - 前記基準データは、評価結果を示すスコアの平均値と標準偏差値とを含み、
前記制御装置が、前記平均値と前記標準偏差値とにより特定されるスコアの分布状態において、車両の運転状態がどの位置にあるかを示すスコアを求める、
ことを特徴とする請求項7に記載の運転評価方法。 - ストレージを備えたコンピュータが、
車載器から送信された、車両の運転状態に応じた評価結果を前記ストレージに格納し、
前記ストレージに格納された複数の評価結果から、当該評価結果の分布状態を特定可能な基準データを生成し、
前記車載器からの基準データの要求に応答して、前記基準データを返送する、
ことを特徴とする基準データ提供方法。 - 前記基準データは、評価結果を示すスコアの平均値と標準偏差値とを含む、
ことを特徴とする請求項9に記載の基準データ提供方法。 - 前記コンピュータが、運転者、車両、走行エリア、車両重量及び走行時間帯の少なくとも1つに応じて前記ストレージに格納された評価結果を絞り込み、当該絞り込んだ評価結果から前記基準データを生成する、
ことを特徴とする請求項9又は請求項10に記載の基準データ提供方法。 - 前記車両の運転状態は、少なくとも燃費に関する情報を含む、
ことを特徴とする請求項9~請求項11のいずれか1つに記載の基準データ提供方法。 - ストレージを備えたコンピュータが、車載器から送信された、車両の運転状態に応じた評価結果を前記ストレージに格納し、前記ストレージに格納された複数の評価結果から、当該評価結果の分布状態を特定可能な基準データを生成し、前記車載器からの基準データの要求に応答して、前記基準データを返送するように構成された、
ことを特徴とする基準データ提供装置。 - ストレージを備えたコンピュータに、
車載器から送信された、車両の運転状態に応じた評価結果を前記ストレージに格納する処理と、
前記ストレージに格納された複数の評価結果から、当該評価結果の分布状態を特定可能な基準データを生成する処理と、
前記車載器からの基準データの要求に応答して、前記基準データを返送する処理と、
を実現させるための基準データ提供プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017562399A JP7032932B2 (ja) | 2016-01-22 | 2016-01-22 | 運転評価装置及び運転評価方法 |
| PCT/JP2016/051839 WO2017126102A1 (ja) | 2016-01-22 | 2016-01-22 | 運転評価装置、運転評価方法、基準データ提供方法、基準データ提供装置及び基準データ提供プログラム |
| EP16886343.9A EP3407323A4 (en) | 2016-01-22 | 2016-01-22 | DRIVING EVALUATION DEVICE, DRIVING EVALUATION METHOD, REFERENCE DATA PROVIDING METHOD, REFERENCE DATA PROVIDING DEVICE, AND REFERENCE DATA PROVIDING PROGRAM |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/051839 WO2017126102A1 (ja) | 2016-01-22 | 2016-01-22 | 運転評価装置、運転評価方法、基準データ提供方法、基準データ提供装置及び基準データ提供プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017126102A1 true WO2017126102A1 (ja) | 2017-07-27 |
Family
ID=59362661
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/051839 WO2017126102A1 (ja) | 2016-01-22 | 2016-01-22 | 運転評価装置、運転評価方法、基準データ提供方法、基準データ提供装置及び基準データ提供プログラム |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3407323A4 (ja) |
| JP (1) | JP7032932B2 (ja) |
| WO (1) | WO2017126102A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200122210A (ko) * | 2019-04-17 | 2020-10-27 | 주식회사 아이노즈 | 차량용 클러스터 장치 및 제어 방법 |
| WO2021079894A1 (ja) * | 2019-10-21 | 2021-04-29 | 本田技研工業株式会社 | 情報管理システム、車両情報管理サーバ、情報管理方法、プログラム及びコンピュータ可読記憶媒体 |
| CN113343448A (zh) * | 2021-05-25 | 2021-09-03 | 京东鲲鹏(江苏)科技有限公司 | 控制效果评估方法、装置、电子设备及存储介质 |
| CN114426025A (zh) * | 2022-03-17 | 2022-05-03 | 一汽解放汽车有限公司 | 驾驶辅助方法、装置、计算机设备和存储介质 |
| CN115104114A (zh) * | 2022-05-16 | 2022-09-23 | 广东逸动科技有限公司 | 评估方法、评估装置、电子设备及计算机可读存储介质 |
| CN116152955A (zh) * | 2023-04-19 | 2023-05-23 | 北京阿帕科蓝科技有限公司 | 车辆状态检测方法、装置、计算机设备和存储介质 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3663941B1 (en) * | 2018-12-07 | 2022-07-13 | Volvo Car Corporation | Evaluation of a simulated vehicle-related feature |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000171267A (ja) * | 1998-12-09 | 2000-06-23 | Data Tec:Kk | 運転傾向性の分析が可能な運行管理システム及びその構成装置 |
| WO2013128919A1 (ja) * | 2012-02-27 | 2013-09-06 | ヤマハ発動機株式会社 | ホストコンピュータ、運転技量判定システム、運転技量判定方法および運転技量判定プログラム |
| JP2014092795A (ja) * | 2012-10-31 | 2014-05-19 | Aisin Aw Co Ltd | 運転支援システム、方法およびプログラム |
| JP2014106926A (ja) * | 2012-11-29 | 2014-06-09 | Fujitsu Ltd | 運行管理方法、運行管理装置及びプログラム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007271959A (ja) * | 2006-03-31 | 2007-10-18 | Mazda Motor Corp | 車両用運転技量判定装置 |
| JP2011126341A (ja) | 2009-12-15 | 2011-06-30 | Fuji Heavy Ind Ltd | 車両用情報提示装置 |
-
2016
- 2016-01-22 WO PCT/JP2016/051839 patent/WO2017126102A1/ja active Application Filing
- 2016-01-22 JP JP2017562399A patent/JP7032932B2/ja active Active
- 2016-01-22 EP EP16886343.9A patent/EP3407323A4/en not_active Withdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000171267A (ja) * | 1998-12-09 | 2000-06-23 | Data Tec:Kk | 運転傾向性の分析が可能な運行管理システム及びその構成装置 |
| WO2013128919A1 (ja) * | 2012-02-27 | 2013-09-06 | ヤマハ発動機株式会社 | ホストコンピュータ、運転技量判定システム、運転技量判定方法および運転技量判定プログラム |
| JP2014092795A (ja) * | 2012-10-31 | 2014-05-19 | Aisin Aw Co Ltd | 運転支援システム、方法およびプログラム |
| JP2014106926A (ja) * | 2012-11-29 | 2014-06-09 | Fujitsu Ltd | 運行管理方法、運行管理装置及びプログラム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3407323A4 * |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200122210A (ko) * | 2019-04-17 | 2020-10-27 | 주식회사 아이노즈 | 차량용 클러스터 장치 및 제어 방법 |
| KR102313799B1 (ko) * | 2019-04-17 | 2021-10-19 | 모트렉스(주) | 차량용 클러스터 장치 및 제어 방법 |
| WO2021079894A1 (ja) * | 2019-10-21 | 2021-04-29 | 本田技研工業株式会社 | 情報管理システム、車両情報管理サーバ、情報管理方法、プログラム及びコンピュータ可読記憶媒体 |
| CN113343448A (zh) * | 2021-05-25 | 2021-09-03 | 京东鲲鹏(江苏)科技有限公司 | 控制效果评估方法、装置、电子设备及存储介质 |
| CN113343448B (zh) * | 2021-05-25 | 2024-03-05 | 京东鲲鹏(江苏)科技有限公司 | 控制效果评估方法、装置、电子设备及存储介质 |
| CN114426025A (zh) * | 2022-03-17 | 2022-05-03 | 一汽解放汽车有限公司 | 驾驶辅助方法、装置、计算机设备和存储介质 |
| CN114426025B (zh) * | 2022-03-17 | 2023-11-14 | 一汽解放汽车有限公司 | 驾驶辅助方法、装置、计算机设备和存储介质 |
| CN115104114A (zh) * | 2022-05-16 | 2022-09-23 | 广东逸动科技有限公司 | 评估方法、评估装置、电子设备及计算机可读存储介质 |
| CN116152955A (zh) * | 2023-04-19 | 2023-05-23 | 北京阿帕科蓝科技有限公司 | 车辆状态检测方法、装置、计算机设备和存储介质 |
| CN116152955B (zh) * | 2023-04-19 | 2023-07-04 | 北京阿帕科蓝科技有限公司 | 车辆状态检测方法、装置、计算机设备和存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2017126102A1 (ja) | 2018-11-15 |
| EP3407323A4 (en) | 2019-09-11 |
| EP3407323A1 (en) | 2018-11-28 |
| JP7032932B2 (ja) | 2022-03-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017126102A1 (ja) | 運転評価装置、運転評価方法、基準データ提供方法、基準データ提供装置及び基準データ提供プログラム | |
| JP6807559B2 (ja) | 情報処理システム、情報処理方法、およびプログラム | |
| KR101836015B1 (ko) | 원격 서버 | |
| JP6027280B1 (ja) | 提供システム | |
| DE102017214573A1 (de) | Fahrzeugantriebssysteme und -verfahren | |
| US20180151088A1 (en) | Vehicle tutorial system and method for sending vehicle tutorial to tutorial manager device | |
| US9395200B2 (en) | Method for providing an operating strategy for a motor vehicle | |
| WO2018016248A1 (ja) | 情報推定システム、情報推定方法及びプログラム | |
| JP6819086B2 (ja) | 車両用表示制御装置 | |
| JP2018049477A (ja) | 運転支援装置、センタ装置 | |
| JP5465090B2 (ja) | 省燃費運転支援システムおよび方法 | |
| CN109389413A (zh) | 数字标牌控制装置及方法和存储有程序的非暂态存储介质 | |
| US9909913B2 (en) | Onboard system, onboard device, information processing method, and information processing program | |
| JP2010176632A (ja) | エコ運転支援装置、エコ運転支援方法 | |
| JP2011126341A (ja) | 車両用情報提示装置 | |
| KR20140130939A (ko) | 고객의 차량 운행패턴 기반 에코 코치 시스템 및 그 방법 | |
| JP6866821B2 (ja) | サーバ装置および車両システム | |
| US20150321604A1 (en) | In-vehicle micro-interactions | |
| JP5387152B2 (ja) | 車両走行制御装置 | |
| JP5215093B2 (ja) | 自動ランキングシステム及びランキング生成方法 | |
| Corcoba Magaña et al. | WATI: warning of traffic incidents for fuel saving | |
| US20220207447A1 (en) | Information providing device, information providing method, and storage medium | |
| JP2012208741A (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP5632785B2 (ja) | 運転操作支援装置及び方法 | |
| JP6554907B2 (ja) | 変速制御装置及び変速制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16886343 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017562399 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2016886343 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2016886343 Country of ref document: EP Effective date: 20180822 |