WO2017046937A1 - 車両用表示装置及び車両用表示方法 - Google Patents
車両用表示装置及び車両用表示方法 Download PDFInfo
- Publication number
- WO2017046937A1 WO2017046937A1 PCT/JP2015/076644 JP2015076644W WO2017046937A1 WO 2017046937 A1 WO2017046937 A1 WO 2017046937A1 JP 2015076644 W JP2015076644 W JP 2015076644W WO 2017046937 A1 WO2017046937 A1 WO 2017046937A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- display
- preceding vehicle
- distance
- highlight
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 22
- 238000001514 detection method Methods 0.000 claims description 18
- 238000013459 approach Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000005259 measurement Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/60—Editing figures and text; Combining figures or text
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
- B60K35/233—Head-up displays [HUD] controlling the size or position in display areas of virtual images depending on the condition of the vehicle or the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
- B60K35/234—Head-up displays [HUD] controlling the brightness, colour or contrast of virtual images depending on the driving conditions or on the condition of the vehicle or the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
- B60K35/285—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver for improving awareness by directing driver's gaze direction or eye points
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/29—Instruments characterised by the way in which information is handled, e.g. showing information on plural displays or prioritising information according to driving conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/80—Arrangements for controlling instruments
- B60K35/81—Arrangements for controlling instruments for controlling displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P1/00—Details of instruments
- G01P1/07—Indicating devices, e.g. for remote indication
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/40—Scaling of whole images or parts thereof, e.g. expanding or contracting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/177—Augmented reality
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/179—Distances to obstacles or vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/18—Information management
- B60K2360/188—Displaying information using colour changes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/18—Information management
- B60K2360/191—Highlight information
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/20—Optical features of instruments
- B60K2360/33—Illumination features
- B60K2360/334—Projection means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0138—Head-up displays characterised by optical features comprising image capture systems, e.g. camera
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/014—Head-up displays characterised by optical features comprising information/image processing systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0141—Head-up displays characterised by optical features characterised by the informative content of the display
Definitions
- the present invention relates to a display device for a vehicle and a method thereof that perform highlighting by superimposing on a preceding vehicle when traveling following a preceding vehicle ahead of the host vehicle.
- Patent Document 1 is disclosed as a vehicle display device applied to an auto cruise control that travels following a preceding vehicle traveling in front of the host vehicle.
- highlighting is performed by superimposing the vehicle on a preceding vehicle to be followed using a head-up display.
- An object is to provide an apparatus and a method thereof.
- a display device for a vehicle and a method thereof detect a preceding vehicle that travels in front of the host vehicle and determine a distance between the preceding vehicle and the host vehicle. Calculate and set the highlighted display displayed superimposed on the preceding vehicle. When the distance between the preceding vehicle and the host vehicle is large, the degree of highlighting is set higher than when the distance is small, and the set highlight image is displayed on the front window provided on the host vehicle. Is displayed in a display area provided so as to overlap with the position.
- the driver can easily recognize the highlighted display even if the preceding vehicle to be followed is far away from the host vehicle.
- FIG. 1 is a block diagram showing a configuration of a vehicle display device according to an embodiment of the present invention.
- FIG. 2 is a flowchart showing the processing procedure of the tracking mark display process by the vehicle display device according to the embodiment of the present invention.
- FIG. 3 is a diagram illustrating an example of display of the tracking mark by the vehicle display device according to the embodiment of the present invention.
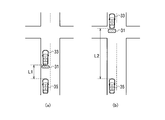
- FIG. 4 is a view for explaining a method of displaying a tracking mark by the vehicle display device according to the embodiment of the present invention.
- FIG. 5 is a diagram for explaining a method of displaying the tracking mark by the vehicle display device according to the embodiment of the present invention.
- FIG. 6 is a diagram for explaining a method of displaying the tracking mark by the vehicle display device according to the embodiment of the present invention.
- FIG. 7 is a view for explaining a modified example of the tracking mark display method by the vehicle display device according to the embodiment of the present invention.
- FIG. 8 is a diagram for explaining a modification of the tracking mark display method by
- FIG. 1 is a block diagram showing a configuration of a vehicle display device according to the present embodiment.
- the vehicle display device 1 according to the present embodiment includes a control unit 3 and a HUD display unit 5.
- the vehicle display device 1 is connected to sensors mounted on the vehicle, and in particular, connected to a preceding vehicle detection sensor 7 and a vehicle speed sensor 9.
- the vehicular display device 1 having such a configuration is mounted on a vehicle, and the vehicle on which the vehicular display device 1 is mounted travels following a preceding vehicle ahead of the host vehicle such as auto cruise control or adaptive cruise control. Is equipped with a system.
- the vehicle display device 1 is a device that performs highlighting by superimposing on a preceding vehicle to be tracked through a front window of the vehicle by a head-up display (HUD).
- HUD head-up display
- the control unit 3 is a control unit that executes highlight control, and outputs a highlighted image to the HUD display unit 5.
- the control unit 3 includes an input interface 11, a preceding vehicle detection unit 13, a preceding vehicle distance calculation unit 15, an emphasis display setting unit 17, and a HUD video generation unit 19.
- the input interface 11 is connected to sensors mounted on the vehicle, in particular, the preceding vehicle detection sensor 7 and the vehicle speed sensor 9, and transmits and receives data necessary for highlight control.
- the preceding vehicle detection unit 13 detects a preceding vehicle traveling in front of the host vehicle. Specifically, the preceding vehicle detection unit 13 acquires the preceding vehicle information from the preceding vehicle detection sensor 7, and the preceding vehicle to be followed from the image ahead of the host vehicle included in the preceding vehicle information, the measurement result by the radar, or the like. Is detected.
- the preceding vehicle distance calculation unit 15 calculates the distance between the preceding vehicle detected by the preceding vehicle detection unit 13 and the host vehicle. Specifically, the preceding vehicle distance calculation unit 15 may calculate the distance between the preceding vehicle and the host vehicle by analyzing the image of the front camera included in the preceding vehicle detection sensor 7, or the preceding vehicle detection sensor 7 may calculate the distance between the preceding vehicle and the host vehicle from the measurement result of the radar included in 7.
- the emphasis display setting unit 17 sets an emphasis display that is displayed so as to be superimposed on the preceding vehicle to be followed. When the distance between the preceding vehicle and the host vehicle is large, the emphasis display setting unit 17 is emphasized compared to the case where the distance is small. Increase the degree of emphasis.
- the highlight display setting unit 17 first sets the display position, display size, spatial frequency, brightness, and the like of the tracking mark displayed as the highlight display. Then, the degree of emphasis of the set following mark is set higher when the distance between the preceding vehicle and the host vehicle is larger than when the distance is small. For example, as the distance between the preceding vehicle and the host vehicle increases, the size of the tracking mark is increased to increase the degree of emphasis.
- the degree of emphasis may be increased by increasing the spatial frequency and luminance of the tracking mark.
- the following mark is a display mark for highlighting a preceding vehicle to be followed, and is superimposed and displayed around the preceding vehicle, for example, below.
- the highlight setting unit 17 highlights the distance between the preceding vehicle and the host vehicle when the distance between the preceding vehicle and the host vehicle is equal to or smaller than the predetermined distance when the distance between the preceding vehicle and the host vehicle is small. Decrease the emphasis level. For example, as the distance between the preceding vehicle and the host vehicle decreases, the size of the tracking mark is decreased to reduce the degree of enhancement. Further, as the distance between the preceding vehicle and the host vehicle becomes smaller, the degree of emphasis may be lowered by lowering the spatial frequency and luminance of the tracking mark.
- the HUD video generation unit 19 generates an image of a head-up display for displaying a follow-up mark that is highlighted according to the setting by the highlighting setting unit 17.
- the control unit 3 includes a general-purpose electronic circuit including a microcomputer, a microprocessor, and a CPU, and peripheral devices such as a memory. Then, by executing a specific program, the vehicle operates as the preceding vehicle detection unit 13, the preceding vehicle distance calculation unit 15, the highlight display setting unit 17, and the HUD video generation unit 19.
- the HUD display unit 5 is a head-up display including a projection unit that projects an image, a screen that reflects the image, a Fresnel mirror, and the like, and a display area that is provided so as to overlap with the position of the front window provided in the vehicle The highlighted image is displayed.
- the HUD display unit 5 is a head-up display that can display an image superimposed on a landscape in front of the vehicle by projecting an image reflected by a mirror as a virtual image in front of the front window.
- the HUD display unit 5 is not limited to such a head-up display.
- a combiner type using a transparent panel instead of displaying on the front window, or a method of directly displaying an image on the front window may be used. That is, the head-up display of the present embodiment only needs to be able to display information superimposed on the scenery visually recognized by the driver through the front window without the driver lowering his head.
- the HUD display unit 5 corresponds to the display unit described in claim 1.
- the preceding vehicle detection sensor 7 is a sensor for detecting a preceding vehicle such as a front camera or a millimeter wave radar, and outputs preceding vehicle information including an image of the front camera and a measurement result of the millimeter wave radar.
- the preceding vehicle detection sensor 7 may include an infrared sensor, an inter-vehicle distance sensor, and the like in addition to the front camera and the millimeter wave radar.
- the vehicle speed sensor 9 detects the vehicle speed from a pulse signal corresponding to the number of rotations of the axle.
- step S10 the preceding vehicle detection unit 13 acquires the preceding vehicle information from the preceding vehicle detection sensor 7, and uses the image of the front camera and the radar measurement result included in the preceding vehicle information. get.
- step S20 the preceding vehicle detection unit 13 determines whether or not a preceding vehicle traveling in front of the host vehicle can be detected by analyzing an image of the front camera. When the preceding vehicle cannot be detected, the process returns to step S10. When the preceding vehicle can be detected, the detected preceding vehicle is determined as the preceding vehicle to be followed and the process proceeds to step S30.
- the preceding vehicle distance calculation unit 15 calculates the distance between the preceding vehicle detected in step S20 and the host vehicle.
- the preceding vehicle distance calculation unit 15 may calculate the distance between the preceding vehicle to be followed and the host vehicle using the measurement result of the radar, or may analyze the image of the front camera to analyze the preceding vehicle and the host vehicle. You may calculate the distance between.
- the highlighting setting unit 17 sets the highlighting displayed to be superimposed on the preceding vehicle.
- the following mark is displayed as an emphasis display. Therefore, the highlight display setting unit 17 sets the display position and display size of the tracking mark.
- the highlight setting unit 17 sets a rectangular frame surrounding the preceding vehicle on the image of the front camera, and sets a base point at the center of the frame. Then, the highlight display setting unit 17 sets the display position of the follow-up mark at a position spaced apart from the base point by a predetermined interval. The predetermined interval is set based on the distance between the preceding vehicle and the host vehicle.
- the highlighting setting unit 17 sets the display size of the tracking mark.
- the display size of the tracking mark may be set according to the size of the preceding vehicle on the image, or may be set according to the distance between the preceding vehicle and the host vehicle.
- the follow-up mark 31 is set to have a slightly larger width than the preceding vehicle 33.
- the highlighting setting unit 17 arranges the tracking mark at the set display position with the set display size in the 3D space of the vehicle. Thereby, as shown in FIG. 3, the follow-up mark 31 appears to be superimposed and displayed adjacent to the preceding vehicle 33.
- the follow-up mark 31 is rectangular or bar-shaped, but may be other shapes such as a rectangular frame surrounding the preceding vehicle, a triangle, a star, an arrow, or the like. Further, the brightness, spatial frequency, and the like of the tracking mark 31 are displayed with predetermined values set in advance. Thus, when the display position and display size of the tracking mark are set, the process proceeds to step S50.
- step S50 when the distance between the preceding vehicle calculated in step S30 and the host vehicle is large, the highlight setting unit 17 increases the degree of highlighting compared to when the distance is small. Specifically, the highlight display setting unit 17 changes the size of the highlight display as the highlight degree of the highlight display. For example, as shown in FIG. 4A, when the preceding vehicle 33 is at a distance L1 from the host vehicle 35, the following mark 31 is displayed in a size that is easy for the driver to recognize as shown in FIG. Is done. However, as shown in FIG. 4B, when the preceding vehicle 33 moves away from the host vehicle 35 and reaches the position of the distance L2, the follow-up mark 31 becomes smaller as shown in FIG. Becomes difficult to see.
- the size of the following mark 31 is set according to the size of the preceding vehicle 33 on the image and the distance between the preceding vehicle 33 and the host vehicle 35. Therefore, when the distance between the preceding vehicle and the host vehicle is larger than the predetermined distance L1, the highlight setting unit 17 is larger when the distance between the preceding vehicle and the host vehicle is larger than when the distance is small.
- the size of the tracking mark 31 is increased to increase the degree of enhancement. For example, as shown in FIG. 5B, the size of the tracking mark 31 is changed to be larger than that in the case of FIG. Thereby, even if the preceding vehicle 33 to be tracked is far away from the host vehicle, the driver can easily recognize the tracking mark 31.
- the predetermined distance L1 may be set to an ideal inter-vehicle distance that is generally required, and the size of the follow-up mark is set so that the driver can easily recognize the follow-up mark at this inter-vehicle distance. Set.
- the highlight setting setting unit 17 lowers the degree of highlighting as compared with the case where the distance is large. For example, as shown in FIG. 6A, when the preceding vehicle 33 is close to the host vehicle, the follow-up mark 31 is displayed too large, which is bothersome for the driver. Therefore, the highlight setting unit 17 reduces the size of the tracking mark 31 as shown in FIG. 6B when the distance between the preceding vehicle and the host vehicle is small as compared to when the distance is large. Reduce the degree of emphasis. As a result, even if the preceding vehicle 33 to be tracked approaches the host vehicle, the driver is not bothered and the track mark 31 can be easily recognized.
- the highlighting setting unit 17 may change the spatial frequency of the highlighting as the highlighting degree of the highlighting. That is, when the distance between the preceding vehicle and the host vehicle is greater than the predetermined distance L1, the spatial frequency of the follow-up mark 31 is greater when the distance between the preceding vehicle and the host vehicle is greater than when the distance is small. Increase the degree of emphasis. For example, as shown in FIG. 7A, when the preceding vehicle 33 is far away from the host vehicle, the spatial frequency of the tracking mark 31 is increased and the edge is displayed clearly. Thereby, even if the preceding vehicle 33 to be tracked is far away from the host vehicle, the driver can easily recognize the tracking mark 31.
- the highlight setting unit 17 determines that the distance between the preceding vehicle and the host vehicle is small compared to the case where the distance is large.
- the spatial frequency of the tracking mark 31 is lowered to lower the enhancement degree.
- the spatial frequency of the tracking mark 31 is lowered to display the edge as blurred.
- the highlighting setting unit 17 may change the brightness of the highlighting as the highlighting degree of the highlighting. That is, when the distance between the preceding vehicle and the host vehicle is greater than the predetermined distance L1, the luminance of the tracking mark 31 is greater when the distance between the preceding vehicle and the host vehicle is larger than when the distance is small. To increase the degree of emphasis. For example, as shown in FIG. 8A, when the preceding vehicle 33 is far away from the host vehicle, the follow-up mark 31 is displayed with a higher brightness. Thereby, even if the preceding vehicle 33 to be tracked is far away from the host vehicle, the driver can easily recognize the tracking mark 31.
- the highlight setting unit 17 determines that the distance between the preceding vehicle and the host vehicle is small compared to the case where the distance is large.
- the brightness of the tracking mark 31 is lowered to lower the enhancement degree.
- FIG. 8 (b) when the preceding vehicle 33 approaches the host vehicle, the follow-up mark 31 is displayed with a lower brightness to make it darker.
- the driver is not bothered and the track mark 31 can be easily recognized.
- two or more of the above-described highlight display size, spatial frequency, and luminance may be combined as the highlight display highlight level.
- step S ⁇ b> 60 the HUD video generation unit 19 generates a highlighted image set in each process described above in the 3D space of the vehicle and outputs it to the HUD display unit 5.
- step S70 the HUD display unit 5 displays the highlighted image set in the 3D space of the vehicle in a display area provided so as to overlap the position of the front window.
- the image of the tracking mark is displayed superimposed on the preceding vehicle, and the driver visually recognizes the tracking mark ahead of the front window.
- the vehicle display device 1 when the distance between the preceding vehicle and the host vehicle is equal to or less than a predetermined distance, the distance between the preceding vehicle and the host vehicle is small, and the distance is large. Compared with, the highlighting degree is lowered. As a result, even if the preceding vehicle to be tracked approaches the host vehicle, the highlighting is not bothered by the driver, and the visibility of the highlighting can be improved.
- the size of the highlighting is increased as the degree of highlighting. Therefore, when the preceding vehicle is far away, the highlighted display can be displayed in a large size, so that the visibility of the highlighted display can be improved.
- the spatial frequency of highlighting is increased as the degree of highlighting. Therefore, when the preceding vehicle is far away, the spatial frequency can be increased, so that the visibility of the highlighted display can be improved.
- the brightness of the highlighting is increased as the degree of highlighting. Therefore, since the brightness can be increased when the preceding vehicle is far, the visibility of the highlighted display can be improved.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Optics & Photonics (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Multimedia (AREA)
- Instrument Panels (AREA)
- Traffic Control Systems (AREA)
- Controls And Circuits For Display Device (AREA)
Abstract
Description
図1は、本実施形態に係る車両用表示装置の構成を示すブロック図である。図1に示すように、本実施形態に係る車両用表示装置1は、制御ユニット3とHUD表示部5を備えている。また、車両用表示装置1は、車両に搭載されているセンサ類に接続されており、特に先行車検出センサ7と車速センサ9に接続されている。このような構成の車両用表示装置1は車両に搭載されており、車両用表示装置1が搭載された車両にはオートクルーズコントロールやアダプティブクルーズコントロール等の自車両前方の先行車に対して追従走行するシステムが装備されている。そして、車両用表示装置1は、ヘッドアップディスプレイ(HUD)によって車両のフロントウィンドウを通じて、追従対象の先行車に重畳させて強調表示を行う装置である。
次に、本実施形態に係る車両用表示装置1による追従マーク表示処理の手順を図2のフローチャートを参照して説明する。
以上詳細に説明したように、本実施形態に係る車両用表示装置1では、先行車に重畳して表示される強調表示を設定し、先行車と自車両との間の距離が大きい場合は、距離が小さい場合に比べて強調表示の強調度合を高くする。これにより、追従対象の先行車が自車両から離れても、運転者は強調表示を容易に認識することができるので、強調表示の視認性を向上させることができる。
3 制御ユニット
5 HUD表示部(表示部)
7 先行車検出センサ
9 車速センサ
11 入力インターフェース
13 先行車検出部
15 先行車距離算出部
17 強調表示設定部
19 HUD映像生成部
Claims (6)
- 自車両前方の先行車に対して追従走行するときに前記先行車に重畳させて強調表示を行う車両用表示装置であって、
前記自車両の前方を走行する先行車を検出する先行車検出部と、
前記先行車検出部で検出された前記先行車と前記自車両との間の距離を算出する先行車距離算出部と、
前記先行車に重畳して表示される前記強調表示を設定し、前記先行車距離算出部で算出された前記先行車と前記自車両との間の距離が大きい場合は、前記距離が小さい場合に比べて前記強調表示の強調度合を高くする強調表示設定部と、
前記強調表示設定部で設定された前記強調表示の画像を、前記自車両に備えられたフロントウィンドウの位置と重複するように設けられた表示領域に表示する表示部と
を備えたことを特徴とする車両用表示装置。 - 前記強調表示設定部は、前記先行車距離算出部で算出された前記先行車と前記自車両との間の距離が所定距離以下のときには、前記先行車と前記自車両との間の距離が小さい場合は、前記距離が大きい場合に比べて前記強調表示の強調度合を低くすることを特徴とする請求項1に記載の車両用表示装置。
- 前記強調表示設定部は、前記強調表示の強調度合として前記強調表示の大きさを大きくすることを特徴とする請求項1に記載の車両用表示装置。
- 前記強調表示設定部は、前記強調表示の強調度合として前記強調表示の空間周波数を高くすることを特徴とする請求項1に記載の車両用表示装置。
- 前記強調表示設定部は、前記強調表示の強調度合として前記強調表示の輝度を高くすることを特徴とする請求項1に記載の車両用表示装置。
- 自車両前方の先行車に対して追従走行するときに前記先行車に重畳させて強調表示を行う車両用表示装置の車両用表示方法であって、
前記車両用表示装置は、
前記自車両の前方を走行する先行車を検出し、
検出された前記先行車と前記自車両との間の距離を算出し、
前記先行車に重畳して表示される前記強調表示を設定し、前記先行車と前記自車両との間の距離が大きい場合は、前記距離が小さい場合に比べて前記強調表示の強調度合を高くし、
設定された前記強調表示の画像を、前記自車両に備えられたフロントウィンドウの位置と重複するように設けられた表示領域に表示する
ことを特徴とする車両用表示方法。
Priority Applications (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2018114061A RU2675719C1 (ru) | 2015-09-18 | 2015-09-18 | Устройство и способ отображения транспортного средства |
| JP2017540430A JP6443559B2 (ja) | 2015-09-18 | 2015-09-18 | 車両用表示装置及び車両用表示方法 |
| BR112018005380-5A BR112018005380B1 (pt) | 2015-09-18 | 2015-09-18 | Aparelho de visualização para veículos e método de visualização de veículos |
| MX2018002815A MX366506B (es) | 2015-09-18 | 2015-09-18 | Aparato de despliegue vehicular y metodo de despliegue vehicular. |
| CA2998600A CA2998600C (en) | 2015-09-18 | 2015-09-18 | Vehicular display apparatus and vehicular display method |
| PCT/JP2015/076644 WO2017046937A1 (ja) | 2015-09-18 | 2015-09-18 | 車両用表示装置及び車両用表示方法 |
| KR1020187007431A KR101960644B1 (ko) | 2015-09-18 | 2015-09-18 | 차량용 표시 장치 및 차량용 표시 방법 |
| US15/760,888 US10304228B2 (en) | 2015-09-18 | 2015-09-18 | Vehicular display apparatus and vehicular display method |
| EP15904124.3A EP3351417B1 (en) | 2015-09-18 | 2015-09-18 | Display apparatus for vehicle and display method for vehicle |
| CN201580083125.8A CN108025644B (zh) | 2015-09-18 | 2015-09-18 | 车辆用显示装置以及车辆用显示方法 |
| MYPI2018701027A MY170683A (en) | 2015-09-18 | 2015-09-18 | Vehicular display apparatus and vehicular display method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/076644 WO2017046937A1 (ja) | 2015-09-18 | 2015-09-18 | 車両用表示装置及び車両用表示方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017046937A1 true WO2017046937A1 (ja) | 2017-03-23 |
Family
ID=58288431
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/076644 WO2017046937A1 (ja) | 2015-09-18 | 2015-09-18 | 車両用表示装置及び車両用表示方法 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US10304228B2 (ja) |
| EP (1) | EP3351417B1 (ja) |
| JP (1) | JP6443559B2 (ja) |
| KR (1) | KR101960644B1 (ja) |
| CN (1) | CN108025644B (ja) |
| BR (1) | BR112018005380B1 (ja) |
| CA (1) | CA2998600C (ja) |
| MX (1) | MX366506B (ja) |
| RU (1) | RU2675719C1 (ja) |
| WO (1) | WO2017046937A1 (ja) |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019031291A1 (ja) * | 2017-08-10 | 2019-02-14 | 日本精機株式会社 | 車両用表示装置 |
| WO2020022239A1 (ja) * | 2018-07-24 | 2020-01-30 | 日本精機株式会社 | 表示制御装置、ヘッドアップディスプレイ装置 |
| CN110895417A (zh) * | 2018-09-12 | 2020-03-20 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法及存储介质 |
| WO2020171042A1 (ja) * | 2019-02-19 | 2020-08-27 | 日本精機株式会社 | 車両用表示装置及びその表示制御プログラム |
| WO2020173772A1 (de) * | 2019-02-26 | 2020-09-03 | Volkswagen Aktiengesellschaft | Verfahren zum betreiben eines fahrerinformationssystems in einem ego-fahrzeug und fahrerinformationssystem |
| JP2022071801A (ja) * | 2020-10-28 | 2022-05-16 | 株式会社日本総合研究所 | 情報処理装置及び情報処理方法 |
| DE102022116189A1 (de) | 2021-07-15 | 2023-01-19 | Toyota Jidosha Kabushiki Kaisha | Anzeige-steuervorrichtung für ein fahrzeug, anzeigeverfahren und nicht-transitorisches computerlesbares aufzeichnungsmedium zur aufzeichnung eines anzeigeprogramms |
| DE102022118033A1 (de) | 2021-07-27 | 2023-02-02 | Toyota Jidosha Kabushiki Kaisha | Fahrzeuganzeigesteuervorrichtung, anzeigeverfahren und speichermedium |
| WO2023032956A1 (ja) * | 2021-08-31 | 2023-03-09 | 日本精機株式会社 | 表示制御装置、ヘッドアップディスプレイ装置、及び表示制御方法 |
| WO2023054305A1 (ja) * | 2021-09-28 | 2023-04-06 | 日本精機株式会社 | 表示制御装置、表示装置、及び表示制御方法 |
| US11762616B2 (en) | 2019-02-26 | 2023-09-19 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US11807260B2 (en) | 2019-02-26 | 2023-11-07 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12005920B2 (en) | 2021-11-10 | 2024-06-11 | Toyota Jidosha Kabushiki Kaisha | Control device, vehicle, mobile terminal, and display device |
| US12037006B2 (en) | 2019-02-26 | 2024-07-16 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12037005B2 (en) | 2019-02-26 | 2024-07-16 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12043275B2 (en) | 2019-02-26 | 2024-07-23 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101916993B1 (ko) * | 2015-12-24 | 2018-11-08 | 엘지전자 주식회사 | 차량용 디스플레이 장치 및 그 제어방법 |
| JP6972549B2 (ja) * | 2016-12-28 | 2021-11-24 | 株式会社リコー | Hud装置、車両装置及び表示方法 |
| JP6820561B2 (ja) * | 2017-12-28 | 2021-01-27 | パナソニックIpマネジメント株式会社 | 画像処理装置、表示装置、ナビゲーションシステム、画像処理方法及びプログラム |
| CN109703556B (zh) * | 2018-12-20 | 2021-01-26 | 斑马网络技术有限公司 | 驾驶辅助方法及设备 |
| DE102019206490B3 (de) * | 2019-05-06 | 2020-03-26 | Volkswagen Aktiengesellschaft | Parkassistenzsystem für ein Kraftfahrzeug, Verfahren zur Einparkunterstützung für ein Kraftfahrzeug, Computerprogramm und computerlesbares Speichermedium |
| JP7308089B2 (ja) * | 2019-07-18 | 2023-07-13 | 株式会社小松製作所 | 作業車両の表示システムおよび作業車両の表示方法 |
| EP3809359A1 (en) * | 2019-10-14 | 2021-04-21 | Ningbo Geely Automobile Research & Development Co. Ltd. | Vehicle driving challenge system and corresponding method |
| JP7480756B2 (ja) | 2021-07-26 | 2024-05-10 | トヨタ自動車株式会社 | 車両用表示制御装置、車両用表示装置、車両用表示制御方法及び車両用表示制御プログラム |
| GB2613003A (en) * | 2021-11-19 | 2023-05-24 | Wayray Ag | System and method |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001063401A (ja) * | 1999-08-31 | 2001-03-13 | Honda Motor Co Ltd | 車載表示装置 |
| JP2013015395A (ja) * | 2011-07-04 | 2013-01-24 | Nissan Motor Co Ltd | 車両用表示装置 |
| JP2015011666A (ja) * | 2013-07-02 | 2015-01-19 | 株式会社デンソー | ヘッドアップディスプレイ及びプログラム |
| JP2015024709A (ja) * | 2013-07-25 | 2015-02-05 | 株式会社デンソー | 車両用ユーザインタフェースシステム |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6822563B2 (en) * | 1997-09-22 | 2004-11-23 | Donnelly Corporation | Vehicle imaging system with accessory control |
| JP2004310489A (ja) * | 2003-04-08 | 2004-11-04 | Nissan Motor Co Ltd | 車両用注意喚起装置 |
| JP2004340825A (ja) * | 2003-05-16 | 2004-12-02 | Xanavi Informatics Corp | ナビゲーション装置 |
| JP2005067514A (ja) | 2003-08-27 | 2005-03-17 | Denso Corp | 車両用表示装置 |
| US7202815B2 (en) * | 2004-08-12 | 2007-04-10 | Motorola, Inc. | Method and apparatus for location determination |
| JP2009040107A (ja) * | 2007-08-06 | 2009-02-26 | Denso Corp | 画像表示制御装置及び画像表示制御システム |
| US8311720B2 (en) * | 2009-01-09 | 2012-11-13 | Robert Bosch Gmbh | Lost target function for adaptive cruise control |
| US8164543B2 (en) * | 2009-05-18 | 2012-04-24 | GM Global Technology Operations LLC | Night vision on full windshield head-up display |
| US8396653B2 (en) * | 2010-02-12 | 2013-03-12 | Robert Bosch Gmbh | Dynamic range display for automotive rear-view and parking systems |
| US8403106B2 (en) * | 2010-03-25 | 2013-03-26 | Raytheon Company | Man-portable non-lethal pressure shield |
| US9158738B2 (en) * | 2010-07-09 | 2015-10-13 | Honda Motor Co., Ltd. | Apparatus for monitoring vicinity of a vehicle |
| RU2458351C1 (ru) * | 2011-02-01 | 2012-08-10 | Герман Петрович Лосев | Способ визуального представления информации водителю безрельсового транспортного средства |
| DE102011006347B4 (de) * | 2011-03-29 | 2023-02-09 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur Ausgabe von grafischen Fahrhinweisen |
| WO2012172077A1 (de) * | 2011-06-17 | 2012-12-20 | Robert Bosch Gmbh | Verfahren und vorrichtung zur unterstützung eines fahrers bei einer spurführung eines fahrzeugs auf einer fahrbahn |
| SE536537C2 (sv) * | 2012-06-11 | 2014-02-11 | Varningssystem | |
| JP6094399B2 (ja) * | 2013-06-24 | 2017-03-15 | 株式会社デンソー | ヘッドアップディスプレイ、及びプログラム |
| JP5942979B2 (ja) * | 2013-12-27 | 2016-06-29 | トヨタ自動車株式会社 | 車両用情報表示装置及び車両用情報表示方法 |
| JP6264037B2 (ja) * | 2013-12-27 | 2018-01-24 | トヨタ自動車株式会社 | 車両用情報表示装置及び車両用情報表示方法 |
| US9947129B2 (en) * | 2014-03-26 | 2018-04-17 | Carestream Health, Inc. | Method for enhanced display of image slices from 3-D volume image |
| CN106687327B (zh) * | 2014-09-29 | 2018-12-11 | 矢崎总业株式会社 | 车辆显示装置 |
| US9713956B2 (en) * | 2015-03-05 | 2017-07-25 | Honda Motor Co., Ltd. | Vehicle-to-vehicle communication system providing a spatiotemporal look ahead and method thereof |
| US9767687B2 (en) * | 2015-09-11 | 2017-09-19 | Sony Corporation | System and method for driving assistance along a path |
-
2015
- 2015-09-18 US US15/760,888 patent/US10304228B2/en active Active
- 2015-09-18 BR BR112018005380-5A patent/BR112018005380B1/pt active IP Right Grant
- 2015-09-18 EP EP15904124.3A patent/EP3351417B1/en active Active
- 2015-09-18 MX MX2018002815A patent/MX366506B/es active IP Right Grant
- 2015-09-18 RU RU2018114061A patent/RU2675719C1/ru active
- 2015-09-18 KR KR1020187007431A patent/KR101960644B1/ko active IP Right Grant
- 2015-09-18 WO PCT/JP2015/076644 patent/WO2017046937A1/ja active Application Filing
- 2015-09-18 JP JP2017540430A patent/JP6443559B2/ja active Active
- 2015-09-18 CA CA2998600A patent/CA2998600C/en active Active
- 2015-09-18 CN CN201580083125.8A patent/CN108025644B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001063401A (ja) * | 1999-08-31 | 2001-03-13 | Honda Motor Co Ltd | 車載表示装置 |
| JP2013015395A (ja) * | 2011-07-04 | 2013-01-24 | Nissan Motor Co Ltd | 車両用表示装置 |
| JP2015011666A (ja) * | 2013-07-02 | 2015-01-19 | 株式会社デンソー | ヘッドアップディスプレイ及びプログラム |
| JP2015024709A (ja) * | 2013-07-25 | 2015-02-05 | 株式会社デンソー | 車両用ユーザインタフェースシステム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3351417A4 * |
Cited By (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7167918B2 (ja) | 2017-08-10 | 2022-11-09 | 日本精機株式会社 | 車両用表示装置 |
| JPWO2019031291A1 (ja) * | 2017-08-10 | 2020-07-02 | 日本精機株式会社 | 車両用表示装置 |
| WO2019031291A1 (ja) * | 2017-08-10 | 2019-02-14 | 日本精機株式会社 | 車両用表示装置 |
| US11170537B2 (en) | 2017-08-10 | 2021-11-09 | Nippon Seiki Co., Ltd. | Vehicle display device |
| WO2020022239A1 (ja) * | 2018-07-24 | 2020-01-30 | 日本精機株式会社 | 表示制御装置、ヘッドアップディスプレイ装置 |
| JPWO2020022239A1 (ja) * | 2018-07-24 | 2021-08-05 | 日本精機株式会社 | 表示制御装置、ヘッドアップディスプレイ装置 |
| JP7255596B2 (ja) | 2018-07-24 | 2023-04-11 | 日本精機株式会社 | 表示制御装置、ヘッドアップディスプレイ装置 |
| CN110895417A (zh) * | 2018-09-12 | 2020-03-20 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法及存储介质 |
| WO2020171042A1 (ja) * | 2019-02-19 | 2020-08-27 | 日本精機株式会社 | 車両用表示装置及びその表示制御プログラム |
| US11762616B2 (en) | 2019-02-26 | 2023-09-19 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| WO2020173772A1 (de) * | 2019-02-26 | 2020-09-03 | Volkswagen Aktiengesellschaft | Verfahren zum betreiben eines fahrerinformationssystems in einem ego-fahrzeug und fahrerinformationssystem |
| US12043275B2 (en) | 2019-02-26 | 2024-07-23 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12037005B2 (en) | 2019-02-26 | 2024-07-16 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US12037006B2 (en) | 2019-02-26 | 2024-07-16 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| US11807260B2 (en) | 2019-02-26 | 2023-11-07 | Volkswagen Aktiengesellschaft | Method for operating a driver information system in an ego-vehicle and driver information system |
| CN113439035A (zh) * | 2019-02-26 | 2021-09-24 | 大众汽车股份公司 | 用于运行自我车辆中的驾驶员信息系统的方法和驾驶员信息系统 |
| JP2022071801A (ja) * | 2020-10-28 | 2022-05-16 | 株式会社日本総合研究所 | 情報処理装置及び情報処理方法 |
| JP7122408B2 (ja) | 2020-10-28 | 2022-08-19 | 株式会社日本総合研究所 | 情報処理装置及び情報処理方法 |
| JP7501463B2 (ja) | 2021-07-15 | 2024-06-18 | トヨタ自動車株式会社 | 車両用表示制御装置、表示方法及び表示プログラム |
| US11922596B2 (en) | 2021-07-15 | 2024-03-05 | Toyota Jidosha Kabushiki Kaisha | Display control device for vehicle, display method, and non-transitory computer readable recording medium recording display program |
| JP2023013336A (ja) * | 2021-07-15 | 2023-01-26 | トヨタ自動車株式会社 | 車両用表示制御装置、表示方法及び表示プログラム |
| DE102022116189A1 (de) | 2021-07-15 | 2023-01-19 | Toyota Jidosha Kabushiki Kaisha | Anzeige-steuervorrichtung für ein fahrzeug, anzeigeverfahren und nicht-transitorisches computerlesbares aufzeichnungsmedium zur aufzeichnung eines anzeigeprogramms |
| DE102022118033A1 (de) | 2021-07-27 | 2023-02-02 | Toyota Jidosha Kabushiki Kaisha | Fahrzeuganzeigesteuervorrichtung, anzeigeverfahren und speichermedium |
| WO2023032956A1 (ja) * | 2021-08-31 | 2023-03-09 | 日本精機株式会社 | 表示制御装置、ヘッドアップディスプレイ装置、及び表示制御方法 |
| WO2023054305A1 (ja) * | 2021-09-28 | 2023-04-06 | 日本精機株式会社 | 表示制御装置、表示装置、及び表示制御方法 |
| US12005920B2 (en) | 2021-11-10 | 2024-06-11 | Toyota Jidosha Kabushiki Kaisha | Control device, vehicle, mobile terminal, and display device |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3351417A4 (en) | 2018-08-22 |
| KR101960644B1 (ko) | 2019-03-20 |
| MX366506B (es) | 2019-07-11 |
| MX2018002815A (es) | 2018-06-15 |
| EP3351417A1 (en) | 2018-07-25 |
| CN108025644A (zh) | 2018-05-11 |
| US20180286094A1 (en) | 2018-10-04 |
| JPWO2017046937A1 (ja) | 2018-08-02 |
| JP6443559B2 (ja) | 2019-01-09 |
| CA2998600C (en) | 2018-10-09 |
| KR20180040679A (ko) | 2018-04-20 |
| CA2998600A1 (en) | 2017-03-23 |
| CN108025644B (zh) | 2019-05-07 |
| BR112018005380A2 (ja) | 2018-10-09 |
| EP3351417B1 (en) | 2019-02-20 |
| BR112018005380B1 (pt) | 2021-12-28 |
| RU2675719C1 (ru) | 2018-12-24 |
| US10304228B2 (en) | 2019-05-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6443559B2 (ja) | 車両用表示装置及び車両用表示方法 | |
| JP6562079B2 (ja) | 車両用表示装置及び車両用表示方法 | |
| JP6330908B2 (ja) | 車両用表示装置及び車両用表示方法 | |
| EP2894620B1 (en) | Vehicle information display device and vehicle information display method | |
| JP6278222B2 (ja) | 車両用表示装置及び車両用表示方法 | |
| JP6264037B2 (ja) | 車両用情報表示装置及び車両用情報表示方法 | |
| JP7077616B2 (ja) | 表示制御装置および表示制御方法 | |
| US10209857B2 (en) | Display control apparatus and display system | |
| JPWO2015129280A1 (ja) | 画像処理装置および画像処理方法 | |
| US9875562B2 (en) | Vehicle information display device and vehicle information display method | |
| JP2017021019A (ja) | 車両用表示装置及び車両用表示方法 | |
| JP2016111509A (ja) | 車両用画像処理装置、車両用画像処理方法およびプログラム | |
| JP2010087861A (ja) | 死角画像表示装置および死角画像表示方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15904124 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017540430 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: MX/A/2018/002815 Country of ref document: MX |
|
| ENP | Entry into the national phase |
Ref document number: 2998600 Country of ref document: CA |
|
| ENP | Entry into the national phase |
Ref document number: 20187007431 Country of ref document: KR Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15760888 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REG | Reference to national code |
Ref country code: BR Ref legal event code: B01A Ref document number: 112018005380 Country of ref document: BR |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2018114061 Country of ref document: RU Ref document number: 2015904124 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 112018005380 Country of ref document: BR Kind code of ref document: A2 Effective date: 20180319 |