WO2015198713A1 - 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム - Google Patents
超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム Download PDFInfo
- Publication number
- WO2015198713A1 WO2015198713A1 PCT/JP2015/062616 JP2015062616W WO2015198713A1 WO 2015198713 A1 WO2015198713 A1 WO 2015198713A1 JP 2015062616 W JP2015062616 W JP 2015062616W WO 2015198713 A1 WO2015198713 A1 WO 2015198713A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- region
- feature amount
- interest
- feature
- unit
- Prior art date
Links
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
Definitions
- the present invention relates to an ultrasonic observation apparatus that observes a tissue to be observed using ultrasonic waves, an operation method of the ultrasonic observation apparatus, and an operation program of the ultrasonic observation apparatus.
- Ultrasound may be used to observe the characteristics of biological tissue that is the object of observation. Specifically, ultrasonic waves are transmitted to the observation target, and predetermined signal processing is performed on the ultrasonic echoes reflected by the observation target, thereby acquiring information related to the characteristics of the observation target.
- a technique for measuring the size of a specific biological tissue from an image of the biological tissue obtained by an ultrasonic observation apparatus has been disclosed (see, for example, Patent Document 1).
- a circular marker is superimposed and displayed at a desired position in an image, the size of the marker is adjusted to determine the size of the tissue to be measured, and the measurement target tissue is determined based on the marker information. Measure area etc.
- information on the size of a biological tissue correlated with the degree of progression of a lesion such as a tumor stage can be obtained with high accuracy, and the accuracy of diagnosis using an ultrasonic image can be improved.
- a technique for extracting a feature quantity of a frequency spectrum calculated from an ultrasonic echo reflected from a living tissue and generating a feature quantity image for visually displaying information on the feature quantity Is disclosed for example, see Patent Document 2. Since the feature quantity of the frequency spectrum correlates with the type of lesion and the like, according to this technique, the type of lesion and the like can be easily grasped visually when making a diagnosis using an ultrasound image. .
- JP 2009-273908 A Japanese Patent No. 5054253
- the present invention has been made in view of the above, and it is possible to realize different measurements or calculations by a simple operation and to reduce the burden on the user, and the operation of the ultrasonic observation apparatus It is an object to provide a method and an operation program for an ultrasonic observation apparatus.
- the ultrasonic observation apparatus converts an ultrasonic echo reflected by the observation target into an electrical signal by transmitting the ultrasonic wave to the observation target.
- An ultrasonic image data generation unit that generates ultrasonic image data based on an echo signal, a first region of interest to be analyzed in an ultrasonic image corresponding to the ultrasonic image data, and at least one of the first regions of interest
- a region-of-interest setting unit that sets a second region of interest
- a frequency analyzer that calculates a plurality of frequency spectra by analyzing the frequency of a signal generated based on the echo signal in the first region of interest And calculating a plurality of frequency feature amounts respectively indicating the characteristics of the plurality of frequency spectra, and among the plurality of frequency feature amounts, the frequency spectrum in the second region of interest.
- a first feature amount calculation unit that calculates a first feature amount that is a statistic of a frequency feature amount corresponding to the second feature amount, and a second feature amount calculation that calculates a second feature amount that indicates the shape feature of the second region of interest.
- a feature amount image data generation unit for generating feature amount image data to be displayed together with an ultrasonic image generated from the echo signal in association with visual information and the frequency feature amount, and the first and second feature amounts
- a composite image data generating unit that generates composite image data for displaying information together with a feature image corresponding to the feature image data.
- the ultrasonic observation apparatus further includes a characteristic determination unit that determines the characteristic of the observation target in the second region of interest based on a combination of the first feature quantity and the second feature quantity.
- the composite image data generation unit generates the composite image data by adding information related to the characteristics of the observation target.
- the ultrasonic observation apparatus further includes a characteristic determination information storage unit that stores characteristic determination information in which the first and second feature quantities and the characteristics of the observation target are associated with each other in the above invention, and the characteristic determination unit Determines the characteristics of the observation target in the second region of interest based on the characteristic determination information.
- the ultrasonic observation apparatus is the above-described invention, wherein one time change of the first and second feature quantities in the second region of interest corresponding to each other is calculated at different times for the same observation target.
- a third feature amount calculation unit that calculates information regarding the third feature amount, and the observation target in the second region of interest based on a combination of one of the first and second feature amounts and the third feature amount
- a composite image data generation unit that adds the information related to the characteristics of the observation target in the second feature region and the second region of interest to generate the composite image data. It is characterized by that.
- a characteristic determination information storage unit that stores characteristic determination information that associates one of the first and second feature quantities, the third feature quantity, and the characteristics of the observation target.
- the characteristic determination unit determines a characteristic of the observation target in the second region of interest based on the characteristic determination information.
- the ultrasonic observation apparatus is the above-described invention, wherein in the above-mentioned invention, the information is transmitted via an external device that stores history information of one of the first and second feature quantities necessary for calculating the third feature quantity and a communication network.
- a communication unit that performs transmission / reception; and the third feature amount calculation unit calculates the third feature amount using history information of one of the first and second feature amounts received by the communication unit.
- the ultrasonic observation apparatus is characterized in that, in the above-mentioned invention, the observation target is a living tissue, and the characteristic of the observation target is a degree of a disease exhibited by the observation target.
- the first feature amount is an average, variance, standard deviation, median, mode of frequency feature amounts corresponding to the frequency spectrum in the second region of interest. It is one of a value, a maximum value, and a minimum value.
- the second feature amount is an area of the second region of interest, a perimeter, and a volume of a three-dimensional region estimated as a cross section through which the central axis passes.
- the diameter or radius when the region is a circle, the long or short diameter when the region is an ellipse, and the maximum value of the diagonal line when the region is a polygon.
- the ultrasonic observation apparatus further includes a control unit that causes the first and second feature quantity calculation units to execute processes for calculating the first and second feature quantities in parallel in the above-described invention. It is characterized by.
- the ultrasonic observation apparatus is characterized in that, in the above invention, the second region of interest is the same region as the first region of interest.
- the ultrasonic observation apparatus is characterized in that, in the above-described invention, the ultrasonic observation apparatus further includes a display unit for displaying a composite image corresponding to the composite image data.
- the ultrasonic image data generation unit converts the ultrasonic wave transmitted from the observation target to the echo signal obtained by converting the ultrasonic echo reflected by the observation target into an electrical signal.
- An ultrasonic image data generation step for generating ultrasonic image data based on the first region of interest, and a region of interest setting unit that sets a first region of interest to be analyzed in an ultrasonic image corresponding to the ultrasonic image data;
- a region setting step a frequency analysis step in which a frequency analysis unit calculates a plurality of frequency spectra by analyzing a frequency of a signal generated based on the echo signal in the first region of interest, and a first feature amount
- a frequency feature amount calculating step in which a calculation unit calculates a plurality of frequency feature amounts respectively indicating features of the plurality of frequency spectra; and feature amount image data generation
- a feature amount image data generating step for generating feature amount image data for displaying the frequency feature amount in association with visual information together with an ultras
- the operation program of the ultrasonic observation apparatus is an echo signal in which an ultrasonic image data generation unit converts an ultrasonic echo reflected by the observation target into an electrical signal.
- An ultrasonic image data generation step for generating ultrasonic image data based on the first region of interest, and a region of interest setting unit that sets a first region of interest to be analyzed in an ultrasonic image corresponding to the ultrasonic image data;
- a region setting step a frequency analysis step in which a frequency analysis unit calculates a plurality of frequency spectra by analyzing a frequency of a signal generated based on the echo signal in the first region of interest, and a first feature amount
- a frequency feature amount calculating step for calculating a plurality of frequency feature amounts respectively indicating features of the plurality of frequency spectra; and a feature amount image data.
- An amount calculation step and a composite image data generation unit that generates composite image data for displaying information on the first and second feature amounts together with a feature amount image corresponding to the feature amount image data. Characterized in that to execute the image data generation step, an ultrasonic observation apparatus.
- the first and second feature amounts are calculated for one set region of interest (second region of interest), different measurements or calculations can be realized by a simple operation, and the user Can be reduced.
- FIG. 1 is a block diagram showing a configuration of an ultrasonic observation apparatus according to Embodiment 1 of the present invention.
- FIG. 2 is a diagram showing the relationship between the reception depth and the amplification factor in the amplification processing performed by the signal amplification unit of the ultrasonic observation apparatus according to Embodiment 1 of the present invention.
- FIG. 3 is a diagram showing the relationship between the reception depth and the amplification factor in the amplification correction process performed by the amplification correction unit of the ultrasound observation apparatus according to Embodiment 1 of the present invention.
- FIG. 4 is a diagram schematically showing a display example of the region of interest set by the region of interest setting unit of the ultrasound observation apparatus according to Embodiment 1 of the present invention.
- FIG. 1 is a block diagram showing a configuration of an ultrasonic observation apparatus according to Embodiment 1 of the present invention.
- FIG. 2 is a diagram showing the relationship between the reception depth and the amplification factor in the amplification processing performed by the signal amplification
- FIG. 5 is a diagram schematically showing a data array in one sound ray of the ultrasonic signal.
- FIG. 6 is a diagram illustrating an example of a frequency spectrum calculated by the frequency analysis unit of the ultrasonic observation apparatus according to Embodiment 1 of the present invention.
- FIG. 7 is a diagram showing a straight line having as a parameter the frequency feature amount corrected by the attenuation correction unit of the ultrasonic observation apparatus according to Embodiment 1 of the present invention.
- FIG. 8 is a flowchart showing an outline of processing performed by the ultrasound observation apparatus according to Embodiment 1 of the present invention.
- FIG. 9 is a flowchart showing an outline of processing executed by the frequency analysis unit of the ultrasonic observation apparatus according to Embodiment 1 of the present invention.
- FIG. 10 is a diagram schematically showing a display example of a composite image on the display unit of the ultrasonic observation apparatus according to Embodiment 1 of the present invention.
- FIG. 11 is a flowchart showing an outline of processing performed by the ultrasound observation apparatus according to the modification of the first embodiment of the present invention.
- FIG. 12 is a block diagram showing a configuration of an ultrasonic observation apparatus according to Embodiment 2 of the present invention.
- FIG. 13 is a diagram showing an outline of the characteristic determination information stored in the characteristic determination information storage unit of the ultrasonic observation apparatus according to Embodiment 2 of the present invention.
- FIG. 14 is a flowchart showing an outline of processing performed by the ultrasound observation apparatus according to Embodiment 2 of the present invention.
- FIG. 15 is a diagram schematically showing a display example of a composite image on the display unit of the ultrasonic observation apparatus according to Embodiment 2 of the present invention.
- FIG. 16 is a block diagram showing a configuration of an ultrasonic observation apparatus according to Embodiment 3 of the present invention.
- FIG. 17 is a diagram showing an overview of information on the second feature quantity stored in the feature quantity information storage unit of the ultrasonic observation apparatus according to Embodiment 3 of the present invention.
- FIG. 18 is a diagram showing an outline of the characteristic determination information stored in the characteristic determination information storage unit of the ultrasonic observation apparatus according to Embodiment 3 of the present invention.
- FIG. 19 is a flowchart showing an outline of processing performed by the ultrasound observation apparatus according to Embodiment 3 of the present invention.
- FIG. 20 is a block diagram showing a configuration of an ultrasonic observation apparatus according to a modification of the third embodiment of the present invention.
- FIG. 21 is a diagram showing an outline of characteristic determination information (second example) stored in the characteristic determination information storage unit of the ultrasonic observation apparatus according to the modification of the third embodiment of the present invention.
- FIG. 1 is a block diagram showing a configuration of an ultrasonic observation apparatus according to Embodiment 1 of the present invention.
- An ultrasonic observation apparatus 1 shown in the figure is an apparatus for observing an observation object using ultrasonic waves.
- the ultrasonic observation apparatus 1 outputs an ultrasonic pulse to an observation target, and receives an ultrasonic echo reflected by the observation target, and an electric signal between the ultrasonic probe 2 and the ultrasonic probe 2.
- a transmission / reception unit 3 for performing transmission / reception, a calculation unit 4 for performing a predetermined calculation on an electrical echo signal obtained by converting an ultrasonic echo into an electrical signal, and generation of image data corresponding to the electrical echo signal It is realized using the image processing unit 5 and a user interface such as a keyboard, a mouse, a touch panel, etc., and is realized using an input unit 6 that receives input of various information, and a display panel made up of liquid crystal or organic EL (Electro Luminescence).
- the display unit 7 for displaying various information including the image generated by the image processing unit 5, the storage unit 8 for storing various information necessary for ultrasonic observation, and the operation control of the ultrasonic observation apparatus 1 are performed.
- the ultrasonic observation apparatus 1 is a process in which the ultrasonic probe 2 provided with the ultrasonic transducer 21 and the ultrasonic probe 2 are detachably connected, and the above-described portions other than the ultrasonic probe 2 are provided.
- Device processing
- the ultrasound probe 2 is in the form of an external probe that irradiates ultrasound from the body surface of the living body, in a lumen such as the digestive tract, the bile pancreatic duct, and a blood vessel.
- any of a form of a miniature ultrasonic probe provided with a long-axis insertion part to be inserted into an ultrasonic endoscope and a form of an ultrasonic endoscope further provided with an optical system in the intraluminal ultrasonic probe may be employed.
- an ultrasonic transducer 21 is provided at the distal end side of the insertion portion of the intraluminal ultrasonic probe, and the intraluminal ultrasonic probe is located at the proximal end side. Removably connected to the processing device.
- the ultrasonic transducer 21 converts an electrical pulse signal received from the transmission / reception unit 3 into an ultrasonic pulse (acoustic pulse), and converts an ultrasonic echo reflected from an external observation target into an electrical echo signal.
- the ultrasonic probe 2 may be one that mechanically scans the ultrasonic transducer 21, or a plurality of elements are arranged in an array as the ultrasonic transducer 21, and the elements involved in transmission and reception are electronically arranged. Electronic scanning may be performed by switching or delaying transmission / reception of each element. In the first embodiment, it is possible to select and use any one of a plurality of different types of ultrasound probes 2 as the ultrasound probe 2.
- the transmission / reception unit 3 is electrically connected to the ultrasound probe 2 and transmits an electrical pulse signal to the ultrasound probe 2, and an echo that is an electrical reception signal from the ultrasound probe 2. Receive a signal. Specifically, the transmission / reception unit 3 generates an electrical pulse signal based on a preset waveform and transmission timing, and transmits the generated pulse signal to the ultrasound probe 2.
- the transmission / reception unit 3 includes a signal amplification unit 31 that amplifies the echo signal.
- the signal amplifier 31 performs STC (Sensitivity Time Control) correction that amplifies an echo signal having a larger reception depth with a higher amplification factor.
- FIG. 2 is a diagram illustrating a relationship between the reception depth and the amplification factor in the STC correction process performed by the signal amplification unit 31.
- the reception depth z shown in FIG. 2 is an amount calculated based on the elapsed time from the reception start point of the ultrasonic wave. As shown in FIG.
- the amplification factor ⁇ (dB) increases linearly from ⁇ 0 to ⁇ th (> ⁇ 0 ) as the reception depth z increases.
- the amplification factor ⁇ (dB) takes a constant value ⁇ th when the reception depth z is equal to or greater than the threshold value z th .
- the value of the threshold value z th is such a value that the ultrasonic signal received from the observation target is almost attenuated and the noise becomes dominant. More generally, when the reception depth z is smaller than the threshold value z th , the amplification factor ⁇ may increase monotonously as the reception depth z increases.
- the transmission / reception unit 3 performs processing such as filtering on the echo signal amplified by the signal amplification unit 31 and then performs A / D conversion to generate a time-domain digital high frequency (RF) signal. Output.
- the transmission / reception unit 3 has a plurality of beams for beam synthesis corresponding to the plurality of elements.
- a channel circuit is included.
- the calculation unit 4 performs amplification correction on the digital RF signal generated by the transmission / reception unit 3 so that the amplification factor ⁇ is constant regardless of the reception depth, and the setting input signal received by the input unit 6.
- a region-of-interest setting unit 42 for setting a first region of interest to be analyzed in the ultrasound image and a second region of interest forming at least a part of the first region of interest; and a digital RF signal subjected to amplification correction
- a frequency analysis unit 43 for calculating a frequency spectrum by performing a fast Fourier transform (FFT: Fast Fourier Transfom) to the frequency analysis unit, and calculating a plurality of frequency feature amounts respectively indicating characteristics of the plurality of frequency spectra,
- a first feature quantity calculation unit 44 that calculates a first feature quantity that is a statistic of a frequency feature quantity corresponding to the frequency spectrum in the second region of interest among a plurality of frequency feature quantities.
- Has a second feature quantity calculating unit 45 for calculating a second feature quantity indicating the
- FIG. 3 is a diagram illustrating the relationship between the reception depth and the amplification factor in the amplification correction process performed by the amplification correction unit 41.
- the amplification rate ⁇ (dB) in the amplification process performed by the amplification correction unit 41 takes the maximum value ⁇ th ⁇ 0 when the reception depth z is zero, and the reception depth z is zero from the threshold z th. Decreases linearly until reaching 0 and is zero when the reception depth z is greater than or equal to the threshold z th .
- the amplification correction unit 41 amplifies and corrects the digital RF signal with the amplification factor determined in this way, thereby canceling the influence of STC correction in the signal amplification unit 31 and outputting a signal with a constant amplification factor ⁇ th. .
- the relationship between the reception depth z and the amplification factor ⁇ performed by the amplification correction unit 41 is different depending on the relationship between the reception depth and the amplification factor in the signal amplification unit 31.
- STC correction is a correction process that eliminates the influence of attenuation from the amplitude of the analog signal waveform by amplifying the amplitude of the analog signal waveform uniformly over the entire frequency band and with a gain that monotonously increases with respect to the depth. is there. For this reason, when generating a B-mode image to be displayed by converting the amplitude of the echo signal into luminance, and when scanning a uniform tissue, the luminance value is constant regardless of the depth by performing STC correction. become. That is, an effect of eliminating the influence of attenuation from the luminance value of the B-mode image can be obtained.
- the amplification correction unit 41 In order to eliminate the influence of the STC correction on the signal subjected to the STC correction for the B-mode image while maintaining the frame rate of the generated image data, the amplification correction unit 41 To correct the amplification factor.
- the region-of-interest setting unit 42 sets a first region of interest that defines a region to be calculated by the frequency analysis unit 43 in a B-mode image that is an ultrasound image. Moreover, the region-of-interest setting unit 42 sets a second region of interest that defines a calculation target region of the second feature amount within the first region of interest.
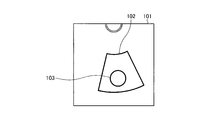
- FIG. 4 is a diagram schematically illustrating a display example of the region of interest set by the region of interest setting unit 42 on the display unit 7.
- An ultrasonic image 101 shown in the figure is, for example, a B-mode image. In the ultrasonic image 101, a first region of interest 102 and a second region of interest 103 are displayed.
- the first region of interest 102 has a shape obtained by cutting out a fan-shaped portion having a small diameter from a state in which two sectors having the same central angle and different diameters are overlapped with each other in the center and the two radial directions.
- the second region of interest 103 is located inside the first region of interest 102 and has a circular shape. The size and position of the first region of interest 102 and the second region of interest 103 can be changed by a setting signal that the input unit 6 accepts input.
- the second region of interest 103 can be an ellipse or a polygon.
- the frequency analysis unit 43 performs fast Fourier transform on an amplitude data group obtained by sampling each sound ray (line data) of a signal obtained by amplifying and correcting a digital RF signal based on an echo signal in the first region of interest at a predetermined time interval. To calculate frequency spectra at a plurality of locations (data positions) on the sound ray.
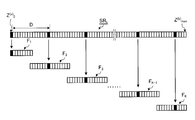
- FIG. 5 is a diagram schematically showing a data array in one sound ray of the ultrasonic signal.
- a white or black rectangle means one piece of data.
- the sound ray SR k is discretized at a time interval corresponding to a sampling frequency (for example, 50 MHz) in A / D conversion performed by the transmission / reception unit 3.
- FIG. 5 shows a case where the first data position of the sound ray SR k of number k is set as the initial value Z (k) 0 in the direction of the reception depth z, but the position of the initial value is arbitrarily set. be able to.
- the calculation result by the frequency analysis unit 43 is obtained as a complex number and stored in the storage unit 8.
- the amplitude data group needs to have a power number of 2 data.
- a process for generating a normal amplitude data group is performed by inserting zero data in an insufficient amount. This point will be described in detail when the processing of the frequency analysis unit 43 is described (see FIG. 9).
- FIG. 6 is a diagram illustrating an example of a frequency spectrum calculated by the frequency analysis unit 43.
- the “frequency spectrum” means “frequency distribution of intensity at a certain reception depth z” obtained by performing fast Fourier transform (FFT operation) on the amplitude data group.
- the “intensity” referred to here is, for example, parameters such as the voltage of the echo signal, the power of the echo signal, the sound pressure of the ultrasonic echo, the acoustic energy of the ultrasonic echo, the amplitude or time integral value of these parameters, or a combination thereof Points to either.
- the horizontal axis represents the frequency f.
- the reception depth z is constant. It will be described later linear L 10 shown in FIG. In the first embodiment, the curve and the straight line are composed of a set of discrete points.
- the lower limit frequency f L and the upper limit frequency f H of the frequency band used for the subsequent calculations are the frequency band of the ultrasonic transducer 21 and the frequency band of the pulse signal transmitted by the transmitting / receiving unit 3.
- f L 3 MHz
- f H 10 MHz.
- the frequency band determined by the lower limit frequency f L and the upper limit frequency f H is referred to as “frequency band F”.
- the frequency spectrum shows a tendency that varies depending on the properties (attributes) of the living tissue scanned with ultrasonic waves. This is because the frequency spectrum has a correlation with the size, number density, acoustic impedance, and the like of the scatterer that scatters ultrasonic waves.
- the “characteristics of the living tissue” referred to here are, for example, malignant tumor (cancer), benign tumor, endocrine tumor, mucinous tumor, normal tissue, vascular and the like.
- the first feature amount calculation unit 44 calculates an approximate frequency feature amount indicating the characteristics of each frequency spectrum by approximating a plurality of frequency spectra in the first region of interest, and the approximation unit 441 calculates An attenuation correction unit 442 that calculates a frequency feature amount by performing attenuation correction on each of a plurality of approximate frequency feature amounts, and a plurality of frequency feature amounts calculated by the attenuation correction unit 442 for each of a plurality of frequency spectra. And a statistic calculator 443 that calculates a first feature quantity that is a statistic of the frequency spectrum corresponding to the frequency spectrum in the second region of interest.
- the ultrasonic attenuation A (f, z) is attenuation that occurs while the ultrasonic waves reciprocate between the reception depth 0 and the reception depth z, and the intensity change before and after the reciprocation (difference in decibel expression). ).
- the attenuation amount A (f, z) is empirically known to be proportional to the frequency in a uniform tissue, and is expressed by the following equation (1).
- a (f, z) 2 ⁇ zf (1)
- the proportionality constant ⁇ is an amount called an attenuation rate.
- Z is the ultrasonic reception depth
- f is the frequency.
- the specific value of the attenuation rate ⁇ is determined according to the site of the living tissue.
- the input unit 6 may be configured to accept an input of a signal for setting or changing the value of the attenuation rate ⁇ .
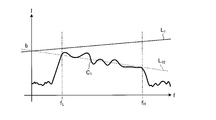
- FIG. 7 is a diagram illustrating a straight line having the frequency feature amounts a, b, and c corrected by the attenuation correction unit 442 as parameters.
- the inclination a has a correlation with the size of the ultrasonic scatterer, and it is generally considered that the larger the scatterer, the smaller the inclination.
- the intercept b has a correlation with the size of the scatterer, the difference in acoustic impedance, the number density (concentration) of the scatterer, and the like. Specifically, the intercept b has a larger value as the scatterer is larger, a larger value as the difference in acoustic impedance is larger, and a larger value as the number density of the scatterers is larger.
- the mid-band fit c is an indirect parameter derived from the slope a and the intercept b, and gives the intensity of the spectrum at the center in the effective frequency band. Therefore, the midband fit c is considered to have a certain degree of correlation with the brightness of the B-mode image in addition to the size of the scatterer, the difference in acoustic impedance, and the number density of the scatterers.
- the statistic calculation unit 443 calculates an average of the plurality of frequency feature amounts of the same type as a statistic amount of the plurality of frequency feature amounts of the same type in the second region of interest. That is, in the first embodiment, the average is the first feature amount.
- the frequency feature quantity for calculating the first feature quantity for example, one type or a plurality of types of the slope a, the intercept b, and the midband fit c described above can be used. When a plurality of types of frequency feature amounts are used, the first feature amount may be calculated for each type.
- the statistic (first feature) calculated by the statistic calculator 443 is one of variance, standard deviation, median, mode, maximum, and minimum of a plurality of frequency feature values. Also good.
- the second feature amount calculation unit 45 calculates the area of the second region of interest as the second feature amount.
- any one of the circumference, diameter, and radius of the second region of interest may be applied as the second feature amount.
- a volume of a sphere having a cross section through which a central axis passes a circle that is a second region of interest displayed as an ultrasonic image may be applied.
- the second region of interest is an ellipse
- any one of its area, perimeter length, major axis, minor axis, and the volume of an ellipsoid whose section passes through the central axis may be used as the second feature amount.
- the second region of interest is a polygon
- the area, the perimeter, the maximum value of the diagonal line, and the volume of the polygonal column with the polygon passing through the central axis may be used as the second feature amount.
- the image processing unit 5 includes a B-mode image data generation unit (ultrasonic image data generation unit) 51 that generates B-mode image data that is an ultrasonic image to be displayed by converting the amplitude of the echo signal into luminance, and a frequency feature amount.
- a feature amount image data generating unit 52 that generates feature amount image data that is displayed in association with visual information together with a B-mode image, and displays information about the first and second feature amounts together with a feature amount image corresponding to the feature amount image data.
- a composite image data generation unit 53 is included in the image data to be displayed by converting the amplitude of the echo signal into luminance, and a frequency feature amount.
- the B-mode image data generation unit 51 performs signal processing using a known technique such as a bandpass filter, logarithmic conversion, gain processing, contrast processing, and the like on the digital signal, and also according to the image display range on the display unit 7.
- B-mode image data is generated by thinning out data in accordance with the data step width determined in advance.
- the B-mode image is a grayscale image in which values of R (red), G (green), and B (blue), which are variables when the RGB color system is adopted as a color space, are matched.
- the feature amount image data generation unit 52 associates the hue with one of the two frequency feature amounts selected from the inclination a, the intercept b, and the midband fit c, and associates the lightness with the other to obtain the feature amount image data. You may make it produce
- the visual information related to the frequency feature amount includes, for example, variables in a color space constituting a predetermined color system such as hue, saturation, brightness, luminance value, R (red), G (green), and B (blue). Can be mentioned.
- the storage unit 8 includes a feature amount information storage unit 81 that stores information on the first feature amount calculated by the first feature amount calculation unit 44 and the second feature amount calculated by the second feature amount calculation unit 45.
- the feature amount information storage unit 81 may further store information regarding the frequency feature amount.
- the storage unit 8 also includes, for example, information necessary for amplification processing (relationship between the amplification factor and the reception depth shown in FIG. 2) and information necessary for amplification correction processing (the amplification factor and the reception depth shown in FIG. 3). Relationship), information necessary for attenuation correction processing (see equation (1)), window function information necessary for frequency analysis processing (Hamming, Hanning, Blackman, etc.), and the like are stored.
- the storage unit 8 stores various programs including an operation program for executing the operation method of the ultrasonic observation apparatus 1.
- the operation program can be recorded on a computer-readable recording medium such as a hard disk, a flash memory, a CD-ROM, a DVD-ROM, or a flexible disk and widely distributed.
- the various programs described above can also be obtained by downloading via a communication network.
- the communication network here is realized by, for example, an existing public line network, LAN (Local Area Network), WAN (Wide Area Network), etc., and may be wired or wireless.
- the storage unit 8 having the above configuration is realized using a ROM (Read Only Memory) in which various programs are installed in advance, and a RAM (Random Access Memory) that stores calculation parameters and data of each process. .
- ROM Read Only Memory
- RAM Random Access Memory
- the control unit 9 is realized by using a CPU (Central Procuring Unit) having various calculation and control functions, various arithmetic circuits, and the like.
- the control unit 9 performs overall control of the ultrasound observation apparatus 1 by reading information stored and stored in the storage unit 8 from the storage unit 8 and executing various arithmetic processes related to the operation method of the ultrasound observation apparatus 1. To do.
- the control unit 9 and the calculation unit 4 may be configured using a common CPU or the like.
- FIG. 8 is a flowchart showing an outline of processing performed by the ultrasonic observation apparatus 1 having the above configuration.
- the ultrasonic observation apparatus 1 measures a sample to be newly observed by the ultrasonic probe 2 (step S1). Specifically, the ultrasonic transducer 21 of the ultrasonic probe 2 converts an electrical pulse signal into an ultrasonic pulse and sequentially transmits it to the specimen. Each ultrasonic pulse is reflected by the specimen and an ultrasonic echo is generated. The ultrasonic transducer 21 converts ultrasonic echoes into electrical echo signals.
- the frequency band of the pulse signal may be a wide band that substantially covers the linear response frequency band of the electroacoustic conversion of the pulse signal to the ultrasonic pulse in the ultrasonic transducer 21. Thus, it is possible to perform accurate approximation in the frequency spectrum approximation process described later.
- the signal amplifying unit 31 that has received the echo signal from the ultrasonic probe 2 amplifies the echo signal (step S2).
- the signal amplifying unit 31 performs amplification (STC correction) of the echo signal based on the relationship between the amplification factor and the reception depth shown in FIG. 2, for example.
- the various processing frequency bands of the echo signal in the signal amplifying unit 31 may be a wide band that substantially covers the linear response frequency band of the acoustoelectric conversion to the echo signal of the ultrasonic echo by the ultrasonic transducer 21. This is also because it is possible to perform accurate approximation in the frequency spectrum approximation processing described later.
- the B-mode image data generation unit 51 generates B-mode image data using the echo signal amplified by the signal amplification unit 31 (step S3). Thereafter, the control unit 9 causes the display unit 7 to display a B mode image corresponding to the generated B mode image data (step S4).
- the region-of-interest setting unit 42 sets a first region of interest (step S5).
- the region-of-interest setting unit 42 initially sets a first region of interest having a predetermined shape and size, for example, at the center of the B-mode image, and the first region of interest is displayed on the display unit 7 under the control of the control unit 9. Display.
- the region of interest setting unit 42 determines the position and size of the first region of interest based on the setting signal. change.
- the amplification correction unit 41 performs amplification correction on the signal output from the transmission / reception unit 3 so that the amplification factor is constant regardless of the reception depth (step S6).
- the amplification correction unit 41 performs amplification correction based on, for example, the relationship between the amplification factor and the reception depth shown in FIG.
- FIG. 9 is a flowchart showing an outline of the processing executed by the frequency analysis unit 43 in step S7.
- the frequency analysis process will be described in detail with reference to the flowchart shown in FIG.
- the frequency analysis unit 43 sets a counter k for identifying a sound ray to be analyzed as k 0 (step S21).
- the frequency analysis unit 43 sets an initial value Z (k) 0 of a data position (corresponding to a reception depth) Z (k) representing a series of data groups (amplitude data group) acquired for the FFT calculation.
- FIG. 5 shows a case where the first data position of the sound ray SR k is set as the initial value Z (k) 0 as described above.
- the frequency analysis unit 43 acquires an amplitude data group to which the data position Z (k) belongs (step S23), and applies a window function stored in the storage unit 8 to the acquired amplitude data group (step S24). .
- the window function By applying the window function to the amplitude data group in this way, it is possible to avoid the amplitude data group from becoming discontinuous at the boundary and to prevent occurrence of artifacts.
- the frequency analysis unit 43 determines whether or not the amplitude data group at the data position Z (k) is a normal data group (step S25).
- the amplitude data group needs to have the number of powers of two.
- the number of data in the normal amplitude data group is 2 n (n is a positive integer).
- amplitude data groups F 2 and F 3 are both normal.
- step S25 If the result of determination in step S25 is that the amplitude data group at data position Z (k) is normal (step S25: Yes), the frequency analysis unit 43 proceeds to step S27 described later.
- step S25 when the amplitude data group at the data position Z (k) is not normal (step S25: No), the frequency analysis unit 43 inserts the normal amplitude data group by inserting zero data for the shortage. Generate (step S26). A window function is applied to the amplitude data group determined to be not normal in step S25 (for example, the amplitude data groups F 1 and F K in FIG. 5) before adding zero data. For this reason, discontinuity of data does not occur even if zero data is inserted into the amplitude data group. After step S26, the frequency analysis unit 43 proceeds to step S27 described later.
- step S27 the frequency analysis unit 43 obtains a frequency spectrum that is a frequency distribution of the amplitude by performing an FFT operation using the amplitude data group (step S27).
- 6 frequency spectrum C 1 shown in is an example of the resulting frequency spectrum as a result of step S27.
- the frequency analysis unit 43 changes the data position Z (k) by the step width D (step S28). It is assumed that the step width D is stored in advance in the storage unit 8.
- the step width D is desirably matched with the data step width used when the B-mode image data generation unit 51 generates the B-mode image data. A value larger than the data step width may be set as the width D.
- the frequency analysis unit 43 determines whether or not the data position Z (k) is larger than the maximum value Z (k) max in the sound ray SR k (step S29).
- the frequency analysis unit 43 increases the counter k by 1 (step S30). This means that the processing is shifted to the next sound ray.
- the frequency analysis unit 43 returns to step S23.
- the frequency analysis unit 43 performs an FFT operation on [(Z (k) max ⁇ Z (k) 0 +1) / D + 1] amplitude data groups for the sound ray SR k .
- [X] represents the maximum integer not exceeding X.
- step S30 the frequency analysis unit 43 determines whether the counter k is greater than the maximum value k max (step S31). When the counter k is larger than k max (step S31: Yes), the frequency analysis unit 43 ends a series of FFT processing. On the other hand, when the counter k is equal to or less than k max (step S31: No), the frequency analysis unit 43 returns to step S22.
- the frequency analysis unit 43 performs the FFT operation a plurality of times for each of (k max ⁇ k 0 +1) sound rays in the first region of interest.
- the approximating unit 441 calculates an approximate frequency feature amount corresponding to each frequency spectrum by performing regression analysis on each of the plurality of frequency spectra calculated by the frequency analyzing unit 43.
- the calculation result is stored in the feature amount information storage unit 81 (step S8).
- the approximating unit 441 approximates each frequency spectrum with a linear expression by regression analysis, and calculates a slope a 0 , an intercept b 0 , and a midband fit c 0 as approximate frequency feature amounts.
- the straight line L 10 shown in FIG. 7 is a regression line approximated by the approximation unit 441 to the frequency spectrum C 1 in the frequency band F by regression analysis.
- the attenuation correction unit 442 calculates the frequency feature amount by performing attenuation correction as the attenuation rate ⁇ on the approximate frequency feature amount approximated to each frequency spectrum by the approximation unit 441, thereby calculating the feature amount information.
- Store in the storage unit 81 step S9).
- a straight line L 1 illustrated in FIG. 7 is an example of a straight line obtained by the attenuation correction unit 442 performing the attenuation correction process.
- f sp is the data sampling frequency
- v s is the sound speed
- D is the data step width
- n is the number of data steps from the first data of the sound ray up to the data position of the amplitude data group to be processed.
- the sampling frequency f sp data and 50 MHz, the sound velocity v s and 1530 m / sec, when a 15 step width D employs a data sequence shown in FIG. 5, the z 0.2295n (mm).
- the feature amount image data generation unit 52 superimposes visual information (for example, hue) associated with the frequency feature amount on each pixel in the first region of interest in the B mode image data generated by the B mode image data generation unit 51. Thus, feature image data is generated (step S10).
- the display unit 7 displays a feature amount image corresponding to the feature amount image data generated by the feature amount image data generation unit 52 under the control of the control unit 9 (step S11).
- the display unit 7 may display the B mode image corresponding to the feature amount image side by side with the feature amount image.
- the region-of-interest setting unit 42 sets a second region of interest (step S12).
- the region-of-interest setting unit 42 initially sets, for example, a second region of interest having a circular shape with a predetermined diameter in the center of the first region of interest, and the display unit 7 controls the second region of interest under the control of the control unit 9. To display. Thereafter, when the input unit 6 receives an input of a setting signal for changing the position and size of the second region of interest, the region of interest setting unit 42 determines the position and size of the second region of interest based on the setting signal. change.
- step S ⁇ b> 12 the statistic calculation unit 443 acquires a plurality of frequency feature amounts in the second region of interest from the storage unit 8, calculates the average as the first feature amount, and stores it in the feature amount information storage unit 81. (Step S13).
- the second feature amount calculation unit 45 calculates the area of the second region of interest as the second feature amount in the second region of interest and stores it in the feature amount information storage unit 81 (step S14).
- the composite image data generation unit 53 After steps S13 and S14, the composite image data generation unit 53 generates composite image data using the first feature amount in the second region of interest, the second feature amount in the second region of interest, and the feature amount image data (step S13). S15).
- FIG. 10 is a diagram schematically illustrating a display example of a composite image displayed by the display unit 7.
- a composite image 201 shown in the figure displays a feature amount image 202 and feature amount information 203.
- the feature amount image 202 superimposes and displays visual information associated with the first feature amount within the first region of interest 102 set for the B-mode image.
- the fact that visual information is superimposed inside the first region of interest 102 is schematically shown by oblique lines.
- the feature amount information 203 includes values of the first and second feature amounts.
- information such as the maximum value, minimum value, and median value of the frequency feature amount in the second region of interest may be displayed as the feature amount information 203.
- step S16 the ultrasonic observation apparatus 1 ends a series of processes.
- the first and second feature amounts are calculated for one set region of interest (second region of interest), different measurements or calculations can be easily performed. This can be realized by reducing the burden on the user.
- the user can make a diagnosis based on various information while looking at the display unit.
- the first feature value calculation process and the second feature value calculation process may be sequentially performed. Either step may be the first processing order.
- FIG. 11 is a flowchart showing an outline of processing performed by the ultrasonic observation apparatus according to the modification of the first embodiment.
- the first feature amount and the second feature amount are calculated for the first region of interest.
- the processes of steps S41 to S49 sequentially correspond to the processes of steps S1 to S9 described with reference to FIG.
- Steps S50 to S52 following step S49 are executed in parallel.
- the feature amount image data generation unit 52 generates feature amount image data (step S50).
- the statistic calculation unit 443 calculates the average of the frequency feature amounts in the first region of interest as the first feature amount in the first region of interest, and stores it in the feature amount information storage unit 81 (step S51).
- the second feature amount calculation unit 45 calculates the area of the first region of interest as the second feature amount in the first region of interest and stores it in the feature amount information storage unit 81 (step S52). This step S52 may be performed after the region-of-interest setting unit 42 sets the first region of interest.
- the composite image data generation unit 53 After steps S50 to S52, the composite image data generation unit 53 generates composite image data using the first and second feature amounts in the first region of interest and the feature amount image data (step S53). Thereafter, the display unit 7 displays a composite image corresponding to the composite image data (step S54).
- FIG. 12 is a block diagram showing a configuration of an ultrasonic observation apparatus according to Embodiment 2 of the present invention.
- the ultrasonic observation apparatus 11 shown in the figure has the same configuration as the ultrasonic observation apparatus 1 described above, except for the configuration of the calculation unit 12 and the storage unit 13. For this reason, the same components as those of the ultrasonic observation apparatus 1 are denoted by the same reference numerals as those of the corresponding ultrasonic observation apparatus 1.
- the calculation unit 12 includes a characteristic determination unit 121 in addition to the amplification correction unit 41, the region of interest setting unit 42, the frequency analysis unit 43, the first feature quantity calculation unit 44, and the second feature quantity calculation unit 45.
- the characteristic determination unit 121 determines the characteristic of the observation target in the second region of interest based on the first and second feature amounts.
- the observation target is a biological tissue, and the malignancy of the disease exhibited by the biological tissue in the second region of interest is applied as the characteristic of the observation target.
- the storage unit 13 includes a characteristic determination information storage unit 131 in addition to the feature amount information storage unit 81.
- the characteristic determination information storage unit 131 stores characteristic determination information that is referred to when the characteristic determination unit 121 determines the characteristic of the sample in the second region of interest.
- FIG. 13 is a diagram illustrating an outline of the characteristic determination information stored in the characteristic determination information storage unit 131.
- the table Tb1 shown in the figure gives the relationship between the combination of the first feature value M and the second feature value S and the malignancy of the disease. Specifically, the table Tb1 gives the following four relationships. (1-1) When the first feature value M is equal to or greater than a predetermined threshold value M 0 (M ⁇ M 0 ) and the second feature value S is equal to or greater than a predetermined threshold value S 0 (S ⁇ S 0 ), The malignancy is “high”.
- the malignancy of the disease is “ Medium.
- the malignancy of the disease is “ Medium.
- the malignancy of the disease is “ Medium.
- the malignancy of the disease is “ Low.
- the disease is lymphadenopathy
- the first feature amount M is large, it is highly likely that the lymphadenopathy is a metastasis-derived enlargement from a tumor of another organ.
- the degree of progression of the disease can be known from the second feature amount S. Therefore, if the first feature value M and the second feature value S are greater than or equal to the threshold values M 0 and S 0 , respectively, it can be determined that the malignancy of the disease is “high”.
- FIG. 14 is a flowchart showing an outline of processing performed by the ultrasound observation apparatus 11.
- the processes in steps S61 to S74 correspond to the processes in steps S1 to S14 described with reference to FIG.
- the characteristic determination unit 121 After the parallel processing in steps S73 and S74, the characteristic determination unit 121 includes the first feature amount M in the second region of interest calculated by the statistic calculation unit 443 in step S73, and the second feature amount calculation unit 45 in step S74. Based on the calculated second feature amount S in the second region of interest, the characteristic determination is performed with reference to the table Tb1 stored in the characteristic determination information storage unit 131 (step S75).
- the composite image data generation unit 53 generates composite image data using the feature amount image data, the first feature amount M, the second feature amount S, and the malignancy of the disease that is the characteristic determination result (step S76). ).
- FIG. 15 is a diagram schematically illustrating a display example of a composite image displayed by the display unit 7.
- a composite image 301 shown in the figure displays a feature amount image 202 and feature amount information 302.
- the feature amount information 302 includes first and second feature amounts and a disease malignancy.
- the characteristics of the observation target are determined according to the combination of the two feature quantities, it is possible to further improve the accuracy when the user makes a diagnosis.
- first feature amounts are calculated for a plurality of types of frequency feature amounts, and a combination of a plurality of first feature amounts and second feature amounts and a disease malignancy level are calculated. May be associated.
- the second feature amount calculation unit 45 may calculate the second feature amount in the entire first region of interest.
- FIG. 16 is a block diagram showing a configuration of an ultrasonic observation apparatus according to Embodiment 3 of the present invention.
- the ultrasonic observation apparatus 14 shown in the figure has the same configuration as the ultrasonic observation apparatus 11 described above, except for the configuration of the calculation unit 15. For this reason, the same components as those of the ultrasonic observation apparatus 11 are denoted by the same reference numerals as those of the corresponding ultrasonic observation apparatus 11.
- the calculation unit 15 calculates the third feature value in addition to the amplification correction unit 41, the region of interest setting unit 42, the frequency analysis unit 43, the first feature value calculation unit 44, the second feature value calculation unit 45, and the characteristic determination unit 121. Part 151.
- the third feature quantity calculation unit 151 refers to the second feature quantity information stored in the feature quantity information storage unit 81, is calculated at different times for the same observation target, and in the second regions of interest corresponding to each other. Information related to the temporal change of the second feature amount is calculated.
- the diameter of the second region of interest is the second feature amount
- the doubling time until the diameter of the second region of interest is doubled is the third feature amount.
- the third feature quantity calculation unit 151 calculates the third feature quantity using the latest second feature quantity and the second feature quantity calculated based on the previous examination. Note that a time interval serving as a reference for the two second feature values when the third feature value calculation unit 151 calculates the third feature value is set in advance, and the time for the latest second feature value is set. The second feature value closest to the interval may be acquired from the feature value information storage unit 81 to calculate the third feature value.
- FIG. 17 is a diagram showing an overview of the history information of the second feature quantity stored in the feature quantity information storage unit 81.
- the table Tb2 shown in the figure associates the examination date and time of the same specimen with the second feature amount (diameter of the second region of interest) calculated by the examination.
- FIG. 18 is a diagram showing an outline of the characteristic determination information stored in the characteristic determination information storage unit 131.
- the table Tb3 shown in the figure gives the relationship between the combination of the first feature value M and the third feature value (doubling time) T and the malignancy of the disease. Specifically, the table Tb3 gives the following four relationships. (2-1) When the first feature value M is equal to or greater than the predetermined threshold value M 0 (M ⁇ M 0 ), and the third feature value T is less than the predetermined threshold value T 0 (T ⁇ T 0 ), The malignancy is “high”.
- the faster the growth rate and the smaller the doubling time T the higher the possibility of malignant tissue such as sarcoma.
- the larger the value of the first feature amount M the higher the possibility of being a malignant tissue. Therefore, if the first feature value M is greater than the threshold value M 0 and the third feature value T is less than the threshold value T 0, it can be determined that the malignancy of the disease is “high”.
- FIG. 19 is a flowchart showing an outline of processing performed by the ultrasound observation apparatus 14.
- the processes in steps S81 to S92 sequentially correspond to the processes in steps S1 to S12 described with reference to FIG.
- the region-of-interest setting unit 42 performs the first and the second regions of interest set in the previous examination of the same sample in the first region-of-interest setting process in step S85 and the second region-of-interest setting process in step S92.
- the position of the second region of interest may be initialized and displayed. Thereby, the user can recognize immediately the area
- Step S93 following step S92 and S94 to S95 are processed in parallel.
- the statistic calculation unit 443 acquires the frequency feature amount in the second region of interest from the feature amount information storage unit 81, calculates the average as the first feature amount in the second region of interest, and calculates the feature amount information. Store in the storage unit 81 (step S93).
- step S94 the second feature amount calculation unit 45 calculates the diameter of the second region of interest as the second feature amount in the second region of interest, and stores it in the feature amount information storage unit 81 together with the examination date and time (step S94).
- This step S94 may be performed after the region-of-interest setting unit 42 sets the first region of interest.
- the third feature quantity calculation unit 151 acquires the past second feature quantity from the feature quantity information storage unit 81, and obtains the acquired second feature quantity and the second feature quantity calculated in step S94. The doubling time as the third feature value is calculated and stored in the feature value information storage unit 81 (step S95).
- the characteristic determination unit 121 After the parallel processing of steps S93 and S94 to S95, the characteristic determination unit 121 includes the first feature amount M in the second region of interest calculated by the statistic calculation unit 443 in step S93, and the third feature amount calculation unit in step S95. Based on the third feature amount T calculated by 151, the characteristic determination is performed with reference to the table Tb3 stored in the characteristic determination information storage unit 131 (step S96).
- the composite image data generation unit 53 generates composite image data using the first feature amount M, the third feature amount T, the malignancy of the disease that is the characteristic determination result, and the feature amount image data (step S97). ).
- the display unit 7 displays a composite image corresponding to the composite image data (step S98).
- the composite image displayed by the display unit 7 corresponds to the composite image 301 shown in FIG. 15 further displaying the third feature amount.
- the accuracy when the user performs diagnosis can be further improved.
- the determination is performed using the feature quantity (third feature quantity) indicating the temporal change mode, such a temporal change is a particularly important index. It is suitable for making a diagnosis of a simple observation target.
- the specific determination may be performed using a table in which the combination of the first to third feature values and the malignancy of the disease are associated with each other.
- the second feature amount calculation unit 45 may calculate the second feature amount in the entire region of the first region of interest.
- the third feature amount calculation unit 151 obtains the past feature information of the first feature amount necessary for calculating the third feature amount from the external device via the communication network. May be.
- FIG. 20 is a block diagram showing a configuration of an ultrasonic observation apparatus according to a modification of the third embodiment.
- the ultrasonic observation apparatus 16 illustrated in the figure includes a communication unit 17 that transmits and receives information to and from an external apparatus via a communication network.
- the ultrasonic observation device 16 transmits various types of information corresponding to the latest ultrasonic echo to the external device via the communication unit 17, while the first feature amount in the past examination necessary for calculating the third feature amount. Receive information from an external device.
- the feature amount information storage unit 81 only needs to temporarily store information corresponding to the latest ultrasonic echo. Therefore, an increase in the storage amount of the storage unit 13 due to the accumulation of inspection data can be suppressed.
- the third feature amount is not limited to the doubling time, and for example, a time change rate of the first feature amount can be applied.
- FIG. 21 is a diagram illustrating an outline of the characteristic determination information stored in the characteristic determination information storage unit 131 when the time change rate of the first feature amount is applied as the third feature amount.
- the table Tb4 shown in the figure applies the area S of the second region of interest as the second feature amount, and the time change rate M of the first feature amount (average frequency feature amount in the second region of interest) as the third feature amount. Gives the relationship of the malignancy of the tissue when 'is applied. Specifically, the table Tb4 gives the following four relationships.
- the second feature value S is equal to or greater than a predetermined threshold value S 0 (S ⁇ S 0 ), and the third feature value M ′ is equal to or greater than a predetermined threshold value M ′ 0 (M ′ ⁇ M ′ 0 ). In some cases, the malignancy of the disease is “high”. (3-2) When the second feature value S is equal to or greater than the threshold value S 0 (S ⁇ S 0 ), and the third feature value M ′ is less than the threshold value M ′ 0 (M ′ ⁇ M ′ 0 ), The grade is "medium".
- the embodiment for carrying out the present invention has been described, but the present invention should not be limited only by the embodiment described above.
- the characteristic of the observation target determined by the characteristic determination unit 121 may be other than the malignancy of the disease.
- the characteristics of the observation target may be used.
- the characteristics of the observation target may be associated with visual information and converted into a B-mode image. You may make it display it superimposed. In the latter case, the generated superimposed image may be displayed side by side with the feature amount image, or may be selectively displayed with the feature amount image.
- the approximation unit 441 may calculate the frequency feature amount by performing regression analysis on the frequency spectrum after the attenuation correction.
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
超音波観測装置は、超音波画像内の第1関心領域および第1関心領域の少なくとも一部をなす第2関心領域を設定する関心領域設定部と、第1関心領域内の複数の周波数スペクトルを算出する周波数解析部と、複数の周波数スペクトルの特徴をそれぞれ示す複数の周波数特徴量を算出し、そのうち第2関心領域内の周波数スペクトルに対応する周波数特徴量の統計量である第1特徴量を算出する第1特徴量算出部と、第2関心領域の形状の特徴を示す第2特徴量を算出する第2特徴量算出部と、周波数特徴量を視覚情報と関連づけてエコー信号から生成された超音波画像とともに表示する特徴量画像データを生成する特徴量画像データ生成部と、第1および第2特徴量に関する情報を特徴量画像とともに表示する合成画像データを生成する合成画像データ生成部と、を備える。
Description
本発明は、超音波を用いて観測対象の組織を観測する超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラムに関する。
観測対象である生体組織の特性を観測するために、超音波を利用することがある。具体的には、観測対象に超音波を送信し、その観測対象によって反射された超音波エコーに対して所定の信号処理を施すことにより、観測対象の特性に関する情報を取得する。
従来、超音波観測装置で得られた生体内組織の画像から、特定の生体組織の大きさを計測する技術が開示されている(例えば、特許文献1を参照)。この技術では、画像の所望の位置に円形のマーカーを重ねて表示し、このマーカーの大きさを調整して計測対象の組織の大きさを確定し、マーカーの情報に基づいて計測対象の組織の面積等を計測する。この技術によれば、腫瘍のステージ等の病変の進行度と相関のある生体組織の大きさに関する情報を精度よく得ることができ、超音波画像を用いた診断の精度を向上させることができる。
上述した技術とは別の従来技術として、生体組織で反射された超音波エコーから算出した周波数スペクトルの特徴量を抽出し、この特徴量に関する情報を視覚的に表示する特徴量画像を生成する技術が開示されている(例えば、特許文献2を参照)。周波数スペクトルの特徴量は、病変の種類等と相関があるため、この技術によれば、超音波画像を用いた診断を行う際に、病変の種類等を視覚的に容易に把握することができる。
上述したように、特許文献1および2に記載の技術は、それぞれに特有の利点を有しているため、検査中にその両方の技術を用いて計測または演算を行うこともある。例えば、転移性リンパ節腫大や粘膜下腫瘍では、生体組織の大きさに関する情報と周波数スペクトルから得られる組織種別の情報とをふまえて、切除手術の適否や予後判断など最終的な診断を行うことがある。
しかしながら、従来の超音波観測装置では、異なる測定または演算を行う場合、測定または演算の対象となる関心領域の設定等をその都度行わなければならず、ユーザにとって負担となっていた。
本発明は、上記に鑑みてなされたものであって、異なる測定または演算を簡便な操作によって実現することができ、ユーザの負担を軽減させることができる超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラムを提供することを目的とする。
上述した課題を解決し、目的を達成するために、本発明に係る超音波観測装置は、観測対象に対して送信した超音波が前記観測対象によって反射された超音波エコーを電気信号に変換したエコー信号に基づいて超音波画像データを生成する超音波画像データ生成部と、前記超音波画像データに対応する超音波画像内で解析対象とする第1関心領域および該第1関心領域の少なくとも一部をなす第2関心領域を設定する関心領域設定部と、前記第1関心領域内の前記エコー信号に基づいて生成される信号の周波数を解析することによって複数の周波数スペクトルを算出する周波数解析部と、前記複数の周波数スペクトルの特徴をそれぞれ示す複数の周波数特徴量を算出し、該複数の周波数特徴量のうち前記第2関心領域内の前記周波数スペクトルに対応する周波数特徴量の統計量である第1特徴量を算出する第1特徴量算出部と、前記第2関心領域の形状の特徴を示す第2特徴量を算出する第2特徴量算出部と、前記周波数特徴量を視覚情報と関連づけて前記エコー信号から生成された超音波画像とともに表示する特徴量画像データを生成する特徴量画像データ生成部と、前記第1および第2特徴量に関する情報を前記特徴量画像データに対応する特徴量画像とともに表示する合成画像データを生成する合成画像データ生成部と、を備えたことを特徴とする。
本発明に係る超音波観測装置は、上記発明において、前記第1特徴量と前記第2特徴量との組合せに基づいて前記第2関心領域における前記観測対象の特性を判定する特性判定部をさらに備え、前記合成画像データ生成部は、前記観測対象の特性に関する情報を加えて前記合成画像データを生成することを特徴とする。
本発明に係る超音波観測装置は、上記発明において、前記第1および第2特徴量ならびに前記観測対象の特性を関連づけた特性判定情報を記憶する特性判定情報記憶部をさらに備え、前記特性判定部は、前記特性判定情報に基づいて前記第2関心領域における前記観測対象の特性を判定することを特徴とする。
本発明に係る超音波観測装置は、上記発明において、同一の前記観測対象に対して異なる時間に算出され、互いに対応する前記第2関心領域における前記第1および第2特徴量の一方の時間変化に関する情報を第3特徴量として算出する第3特徴量算出部と、前記第1および第2特徴量の一方と前記第3特徴量との組合せに基づいて前記第2関心領域における前記観測対象の特性を判定する特性判定部と、をさらに備え、前記合成画像データ生成部は、前記第3特徴量および前記第2関心領域における前記観測対象の特性に関する情報を加えて前記合成画像データを生成することを特徴とする。
本発明に係る超音波観測装置は、上記発明において、前記第1および第2特徴量の一方、前記第3特徴量ならびに前記観測対象の特性を関連づけた特性判定情報を記憶する特性判定情報記憶部をさらに備え、前記特性判定部は、前記特性判定情報に基づいて前記第2関心領域における前記観測対象の特性を判定することを特徴とする。
本発明に係る超音波観測装置は、上記発明において、前記第3特徴量の算出に必要な前記第1および第2特徴量の一方の履歴情報を記憶する外部装置と通信ネットワークを介して情報の送受信を行う通信部をさらに備え、前記第3特徴量算出部は、前記通信部が受信した前記第1および第2特徴量の一方の履歴情報を用いて前記第3特徴量を算出することを特徴とする。
本発明に係る超音波観測装置は、上記発明において、前記観測対象は生体組織であり、前記観測対象の特性は該観測対象が呈する疾患の程度であることを特徴とする。
本発明に係る超音波観測装置は、上記発明において、前記第1特徴量は、前記第2関心領域内の前記周波数スペクトルに対応する周波数特徴量の平均、分散、標準偏差、中央値、最頻値、最大値および最小値のいずれか一つであることを特徴とする。
本発明に係る超音波観測装置は、上記発明において、前記第2特徴量は、前記第2関心領域の面積、周囲長、該領域を中心軸が通過する断面として推定される3次元領域の体積、該領域が円である場合の直径または半径、該領域が楕円である場合の長径または短径、および該領域が多角形である場合の対角線の最大値、のいずれか一つであることを特徴とする。
本発明に係る超音波観測装置は、上記発明において、前記第1および第2特徴量算出部が前記第1および第2特徴量をそれぞれ算出する処理を並列に実行させる制御部をさらに備えたことを特徴とする。
本発明に係る超音波観測装置は、上記発明において、前記第2関心領域は、前記第1関心領域と同じ領域であることを特徴とする。
本発明に係る超音波観測装置は、上記発明において、前記合成画像データに対応する合成画像を表示する表示部をさらに備えたことを特徴とする。
本発明に係る超音波観測装置の作動方法は、超音波画像データ生成部が、観測対象に対して送信した超音波が前記観測対象によって反射された超音波エコーを電気信号に変換したエコー信号に基づいて超音波画像データを生成する超音波画像データ生成ステップと、関心領域設定部が、前記超音波画像データに対応する超音波画像内で解析対象とする第1関心領域を設定する第1関心領域設定ステップと、周波数解析部が、前記第1関心領域内の前記エコー信号に基づいて生成される信号の周波数を解析することによって複数の周波数スペクトルを算出する周波数解析ステップと、第1特徴量算出部が、前記複数の周波数スペクトルの特徴をそれぞれ示す複数の周波数特徴量を算出する周波数特徴量算出ステップと、特徴量画像データ生成部が、前記周波数特徴量を視覚情報と関連づけて前記エコー信号から生成された超音波画像とともに表示する特徴量画像データを生成する特徴量画像データ生成ステップと、前記関心領域設定部が、前記第1関心領域の少なくとも一部をなす第2関心領域を設定する第2関心領域設定ステップと、前記第1特徴量算出部が、前記第2関心領域内の前記周波数スペクトルに対応する前記周波数特徴量の統計量である第1特徴量を算出する第1特徴量算出ステップと、第2特徴量算出部が、前記第2関心領域の形状の特徴を示す第2特徴量を算出する第2特徴量算出ステップと、合成画像データ生成部が、前記第1および第2特徴量に関する情報を前記特徴量画像データに対応する特徴量画像とともに表示する合成画像データを生成する合成画像データ生成ステップと、を有することを特徴とする。
本発明に係る超音波観測装置の作動プログラムは、超音波画像データ生成部が、観測対象に対して送信した超音波が前記観測対象によって反射された超音波エコーを電気信号に変換したエコー信号に基づいて超音波画像データを生成する超音波画像データ生成ステップと、関心領域設定部が、前記超音波画像データに対応する超音波画像内で解析対象とする第1関心領域を設定する第1関心領域設定ステップと、周波数解析部が、前記第1関心領域内の前記エコー信号に基づいて生成される信号の周波数を解析することによって複数の周波数スペクトルを算出する周波数解析ステップと、第1特徴量算出部が、前記複数の周波数スペクトルの特徴をそれぞれ示す複数の周波数特徴量を算出する周波数特徴量算出ステップと、特徴量画像データ生成部が、前記周波数特徴量を視覚情報と関連づけて前記エコー信号から生成された超音波画像とともに表示する特徴量画像データを生成する特徴量画像データ生成ステップと、前記関心領域設定部が、前記第1関心領域の少なくとも一部をなす第2関心領域を設定する第2関心領域設定ステップと、前記第1特徴量算出部が、前記第2関心領域内の前記周波数スペクトルに対応する前記周波数特徴量の統計量である第1特徴量を算出する第1特徴量算出ステップと、第2特徴量算出部が、前記第2関心領域の形状の特徴を示す第2特徴量を算出する第2特徴量算出ステップと、合成画像データ生成部が、前記第1および第2特徴量に関する情報を前記特徴量画像データに対応する特徴量画像とともに表示する合成画像データを生成する合成画像データ生成ステップと、を超音波観測装置に実行させることを特徴とする。
本発明によれば、設定された一つの関心領域(第2関心領域)に対して第1および第2特徴量を算出するため、異なる測定または演算を簡便な操作によって実現することができ、ユーザの負担を軽減させることができる。
以下、添付図面を参照して、本発明を実施するための形態(以下、「実施の形態」という)を説明する。
(実施の形態1)
図1は、本発明の実施の形態1に係る超音波観測装置の構成を示すブロック図である。同図に示す超音波観測装置1は、超音波を用いて観測対象を観測するための装置である。
図1は、本発明の実施の形態1に係る超音波観測装置の構成を示すブロック図である。同図に示す超音波観測装置1は、超音波を用いて観測対象を観測するための装置である。
超音波観測装置1は、観測対象へ超音波パルスを出力するとともに、観測対象によって反射された超音波エコーを受信する超音波探触子2と、超音波探触子2との間で電気信号の送受信を行う送受信部3と、超音波エコーを電気信号に変換した電気的なエコー信号に対して所定の演算を施す演算部4と、電気的なエコー信号に対応する画像データの生成を行う画像処理部5と、キーボード、マウス、タッチパネル等のユーザインタフェースを用いて実現され、各種情報の入力を受け付ける入力部6と、液晶または有機EL(Electro Luminescence)等からなる表示パネルを用いて実現され、画像処理部5が生成した画像を含む各種情報を表示する表示部7と、超音波観測に必要な各種情報を記憶する記憶部8と、超音波観測装置1の動作制御を行う制御部9と、を備える。
超音波観測装置1は、超音波振動子21が設けられる超音波探触子2と、超音波探触子2が着脱可能に接続され、超音波探触子2以外の上記部分が設けられる処理装置(プロセッサ)とによって構成される。ここで、観測対象が生体組織である場合、超音波探触子2は、生体の体表から超音波を照射する体外式探触子の形態、消化管、胆膵管、血管等の管腔内に挿入する長軸の挿入部を備えたミニチュア超音波プローブの形態、管腔内超音波プローブに光学系をさらに備えた超音波内視鏡の形態、のいずれの形態であってもよい。このうち、超音波内視鏡の形態をとった場合には、管腔内超音波プローブの挿入部の先端側に超音波振動子21が設けられ、管腔内超音波プローブは基端側で処理装置と着脱可能に接続する。
超音波振動子21は、送受信部3から受信した電気的なパルス信号を超音波パルス(音響パルス)に変換するとともに、外部の観測対象で反射された超音波エコーを電気的なエコー信号に変換する。超音波探触子2は、超音波振動子21をメカ的に走査させるものであってもよいし、超音波振動子21として複数の素子をアレイ状に設け、送受信にかかわる素子を電子的に切り替えたり、各素子の送受信に遅延をかけたりすることで、電子的に走査させるものであってもよい。本実施の形態1では、超音波探触子2として、互いに異なる複数種類のいずれかの超音波探触子2を選択して使用することが可能である。
送受信部3は、超音波探触子2と電気的に接続され、電気的なパルス信号を超音波探触子2へ送信するとともに、超音波探触子2から電気的な受信信号であるエコー信号を受信する。具体的には、送受信部3は、予め設定された波形および送信タイミングに基づいて電気的なパルス信号を生成し、この生成したパルス信号を超音波探触子2へ送信する。
送受信部3は、エコー信号を増幅する信号増幅部31を有する。信号増幅部31は、受信深度が大きいエコー信号ほど高い増幅率で増幅するSTC(Sensitivity Time Control)補正を行う。図2は、信号増幅部31が行うSTC補正処理における受信深度と増幅率との関係を示す図である。図2に示す受信深度zは、超音波の受信開始時点からの経過時間に基づいて算出される量である。図2に示すように、増幅率β(dB)は、受信深度zが閾値zthより小さい場合、受信深度zの増加に伴ってβ0からβth(>β0)へ線型に増加する。また、増幅率β(dB)は、受信深度zが閾値zth以上である場合、一定値βthをとる。閾値zthの値は、観測対象から受信する超音波信号がほとんど減衰してしまい、ノイズが支配的になるような値である。より一般に、増幅率βは、受信深度zが閾値zthより小さい場合、受信深度zの増加に伴って単調増加すればよい。
送受信部3は、信号増幅部31によって増幅されたエコー信号に対してフィルタリング等の処理を施した後、A/D変換することによって時間ドメインのデジタル高周波(RF:Radio Frequency)信号を生成して出力する。なお、超音波探触子2が複数の素子をアレイ状に設けた超音波振動子21を電子的に走査させるものである場合、送受信部3は、複数の素子に対応したビーム合成用の多チャンネル回路を有する。
演算部4は、送受信部3が生成したデジタルRF信号に対して受信深度によらず増幅率βを一定とするよう増幅補正を行う増幅補正部41と、入力部6が受け付けた設定入力信号に基づいて、超音波画像内で解析対象とする第1関心領域および該第1関心領域の少なくとも一部をなす第2関心領域を設定する関心領域設定部42と、増幅補正を行ったデジタルRF信号に高速フーリエ変換(FFT:Fast Fourier Transfom)を施して周波数解析を行うことにより周波数スペクトルを算出する周波数解析部43と、複数の周波数スペクトルの特徴をそれぞれ示す複数の周波数特徴量を算出し、該複数の周波数特徴量のうち第2関心領域内の前記周波数スペクトルに対応する周波数特徴量の統計量である第1特徴量を算出する第1特徴量算出部44と、第2関心領域の形状の特徴を示す第2特徴量を算出する第2特徴量算出部45と、を有する。演算部4は、CPU(Central Proccesing Unit)や各種演算回路等を用いて実現される。
図3は、増幅補正部41が行う増幅補正処理における受信深度と増幅率との関係を示す図である。図3に示すように、増幅補正部41が行う増幅処理における増幅率β(dB)は、受信深度zがゼロのとき最大値βth-β0をとり、受信深度zがゼロから閾値zthに達するまで線型に減少し、受信深度zが閾値zth以上のときゼロである。このように定められる増幅率によって増幅補正部41がデジタルRF信号を増幅補正することにより、信号増幅部31におけるSTC補正の影響を相殺し、一定の増幅率βthの信号を出力することができる。なお、増幅補正部41が行う受信深度zと増幅率βの関係は、信号増幅部31における受信深度と増幅率の関係に応じて異なることは勿論である。
このような増幅補正を行う理由を説明する。STC補正は、アナログ信号波形の振幅を全周波数帯域にわたって均一に、かつ、深度に対しては単調増加する増幅率で増幅させることで、アナログ信号波形の振幅から減衰の影響を排除する補正処理である。このため、エコー信号の振幅を輝度に変換して表示するBモード画像を生成する場合、かつ、一様な組織を走査した場合には、STC補正を行うことによって深度によらず輝度値が一定になる。すなわち、Bモード画像の輝度値から減衰の影響を排除する効果を得ることができる。
一方、本実施の形態1のように超音波の周波数スペクトルを算出して解析した結果を利用する場合、STC補正でも超音波の伝播に伴う減衰の影響を正確に排除できるわけではない。なぜなら、一般に減衰量は周波数によって異なるが(後述する式(1)を参照)、STC補正の増幅率は距離だけに応じて変化し、周波数依存性がないためである。
上述した問題、すなわち、超音波の周波数スペクトルを算出して解析した結果を利用する場合、STC補正でも超音波の伝播に伴う減衰の影響を正確に排除できるわけではない、という問題を解決するには、Bモード画像を生成する際にSTC補正を施した受信信号を出力する一方、周波数スペクトルに基づいた画像を生成する際に、Bモード画像を生成するための送信とは異なる新たな送信を行い、STC補正を施していない受信信号を出力することが考えられる。ところがこの場合には、受信信号に基づいて生成される画像データのフレームレートが低下してしまうという問題がある。
そこで、本実施の形態1では、生成される画像データのフレームレートを維持しつつ、Bモード画像用にSTC補正を施した信号に対してSTC補正の影響を排除するために、増幅補正部41によって増幅率の補正を行う。
関心領域設定部42は、超音波画像であるBモード画像内で、周波数解析部43によるスペクトルの算出対象領域を定める第1関心領域を設定する。また、関心領域設定部42は、第1関心領域内で、第2特徴量の算出対象領域を定める第2関心領域を設定する。図4は、関心領域設定部42が設定する関心領域の表示部7における表示例を模式的に示す図である。同図に示す超音波画像101は、例えばBモード画像である。超音波画像101では、第1関心領域102、および第2関心領域103が表示されている。第1関心領域102は、中心角が同じで径が異なる二つの扇形を、中心および二つの径方向を合わせて重ねた状態から、径が小さい扇形の部分を切り取った形状をなす。第2関心領域103は、第1関心領域102の内部に位置し、円形をなす。第1関心領域102および第2関心領域103の大きさおよび位置は、入力部6が入力を受け付ける設定信号によって変更可能である。なお、第2関心領域103を楕円や多角形とすることも可能である。
周波数解析部43は、第1関心領域内でエコー信号に基づくデジタルRF信号を増幅補正した信号の各音線(ラインデータ)を、所定の時間間隔でサンプリングした振幅データ群を高速フーリエ変換することによって音線上の複数の箇所(データ位置)における周波数スペクトルを算出する。
図5は、超音波信号の1つの音線におけるデータ配列を模式的に示す図である。同図に示す音線SRkにおいて、白または黒の長方形は、1つのデータを意味している。音線SRkは、送受信部3が行うA/D変換におけるサンプリング周波数(例えば50MHz)に対応した時間間隔で離散化されている。図5では、番号kの音線SRkの1番目のデータ位置を受信深度zの方向の初期値Z(k)
0として設定した場合を示しているが、初期値の位置は任意に設定することができる。周波数解析部43による算出結果は複素数で得られ、記憶部8に格納される。
図5に示すデータ群Fj(j=1、2、・・・、K)は、高速フーリエ変換の対象となる振幅データ群である。一般に、高速フーリエ変換を行うためには、振幅データ群が2のべき乗のデータ数を有している必要がある。この意味で、振幅データ群Fj(j=2、・・・、K-1)はデータ数が16(=24)で正常なデータ群である一方、振幅データ群F1、FKは、それぞれデータ数が9、12であるため異常なデータ群である。異常なデータ群に対して高速フーリエ変換を行う際には、不足分だけゼロデータを挿入することにより、正常な振幅データ群を生成する処理を行う。この点については、周波数解析部43の処理を説明する際に詳述する(図9を参照)。
図6は、周波数解析部43が算出する周波数スペクトルの例を示す図である。ここでいう「周波数スペクトル」とは、振幅データ群を高速フーリエ変換(FFT演算)することによって得られた「ある受信深度zにおける強度の周波数分布」を意味する。また、ここでいう「強度」とは、例えばエコー信号の電圧、エコー信号の電力、超音波エコーの音圧、超音波エコーの音響エネルギー等のパラメータ、これらパラメータの振幅や時間積分値やその組合せのいずれかを指す。
図6では、横軸に周波数fを取っている。また、図6では、縦軸に、強度I0を基準強度Ic(定数)で除した量の常用対数(デシベル表現)I=log10(I0/Ic)を取っている。図6において、受信深度zは一定である。図6に示す直線L10については後述する。なお、本実施の形態1において、曲線および直線は、離散的な点の集合からなる。
図6に示す周波数スペクトルC1において、以後の演算に使用する周波数帯域の下限周波数fLおよび上限周波数fHは、超音波振動子21の周波数帯域、送受信部3が送信するパルス信号の周波数帯域などをもとに決定されるパラメータであり、例えばfL=3MHz、fH=10MHzである。以下、図6において、下限周波数fLおよび上限周波数fHによって定まる周波数帯域を「周波数帯域F」という。
一般に、周波数スペクトルは、観測対象が生体組織である場合、超音波が走査された生体組織の性状(属性)によって異なる傾向を示す。これは、周波数スペクトルが、超音波を散乱する散乱体の大きさ、数密度、音響インピーダンス等と相関を有しているためである。ここでいう「生体組織の性状」とは、例えば悪性腫瘍(癌)、良性腫瘍、内分泌腫瘍、粘液性腫瘍、正常組織、脈管などのことである。
第1特徴量算出部44は、第1関心領域内の複数の周波数スペクトルをそれぞれ近似することによって各周波数スペクトルの特徴を示す近似周波数特徴量を算出する近似部441と、近似部441が算出した複数の近似周波数特徴量の各々に対して減衰補正を行うことによって周波数特徴量を算出する減衰補正部442と、減衰補正部442が複数の周波数スペクトルに対してそれぞれ算出した複数の周波数特徴量のうち第2関心領域内の周波数スペクトルに対応する周波数スペクトルの統計量である第1特徴量を算出する統計量算出部443と、を有する。
近似部441は、所定周波数帯域における周波数スペクトルの回帰分析を行って周波数スペクトルを一次式(回帰直線)で近似することにより、この近似した一次式を特徴付ける近似周波数特徴量を算出する。例えば、図6に示す周波数スペクトルC1の場合、近似部441は、周波数帯域Fで回帰分析を行い周波数スペクトルC1を一次式で近似することによって回帰直線L10を得る。換言すると、近似部441は、回帰直線L10の傾きa0、切片b0、および周波数帯域Fの中心周波数fM=(fL+fH)/2の回帰直線上の値であるミッドバンドフィット(Mid-band fit)c0=a0fM+b0を近似周波数特徴量として算出する。なお、近似部441は、回帰分析によって二次以上の多項式で周波数スペクトルを近似するようにしてもよい。
減衰補正部442が行う補正について説明する。一般に、超音波の減衰量A(f,z)は、超音波が受信深度0と受信深度zとの間を往復する間に生じる減衰であり、往復する前後の強度変化(デシベル表現での差)として定義される。減衰量A(f,z)は、一様な組織内では周波数に比例することが経験的に知られており、以下の式(1)で表現される。
A(f,z)=2αzf ・・・(1)
ここで、比例定数αは減衰率と呼ばれる量である。また、zは超音波の受信深度であり、fは周波数である。減衰率αの具体的な値は、観測対象が生体組織である場合、生体組織の部位に応じて定まる。なお、本実施の形態1において、入力部6が減衰率αの値を設定または変更する信号の入力を受け付け可能な構成としてもよい。
A(f,z)=2αzf ・・・(1)
ここで、比例定数αは減衰率と呼ばれる量である。また、zは超音波の受信深度であり、fは周波数である。減衰率αの具体的な値は、観測対象が生体組織である場合、生体組織の部位に応じて定まる。なお、本実施の形態1において、入力部6が減衰率αの値を設定または変更する信号の入力を受け付け可能な構成としてもよい。
減衰補正部442は、近似部441が算出した近似周波数特徴量(傾きa0、切片b0、ミッドバンドフィットc0)に対し、以下に示す式(2)~(4)にしたがって減衰補正を行うことにより、周波数特徴量a、b、cを算出する。
a=a0+2αz ・・・(2)
b=b0 ・・・(3)
c=c0+2αzfM(=afM+b) ・・・(4)
式(2)、(4)からも明らかなように、減衰補正部442は、超音波の受信深度zが大きいほど、補正量が大きい補正を行う。また、式(3)によれば、切片に関する補正は恒等変換である。これは、切片が周波数0(Hz)に対応する周波数成分であって減衰の影響を受けないためである。
a=a0+2αz ・・・(2)
b=b0 ・・・(3)
c=c0+2αzfM(=afM+b) ・・・(4)
式(2)、(4)からも明らかなように、減衰補正部442は、超音波の受信深度zが大きいほど、補正量が大きい補正を行う。また、式(3)によれば、切片に関する補正は恒等変換である。これは、切片が周波数0(Hz)に対応する周波数成分であって減衰の影響を受けないためである。
図7は、減衰補正部442が補正した周波数特徴量a、b、cをパラメータとして有する直線を示す図である。直線L1の式は、
I=af+b=(a0+2αz)f+b0 ・・・(5)
で表される。この式(5)からも明らかなように、直線L1は、減衰補正前の直線L10と比較して、傾きが大きく(a>a0)、かつ切片が同じ(b=b0)である。
I=af+b=(a0+2αz)f+b0 ・・・(5)
で表される。この式(5)からも明らかなように、直線L1は、減衰補正前の直線L10と比較して、傾きが大きく(a>a0)、かつ切片が同じ(b=b0)である。
3つの周波数特徴量のうち、傾きaは、超音波の散乱体の大きさと相関を有し、一般に散乱体が大きいほど傾きが小さな値を有すると考えられる。また、切片bは、散乱体の大きさ、音響インピーダンスの差、散乱体の数密度(濃度)等と相関を有している。具体的には、切片bは、散乱体が大きいほど大きな値を有し、音響インピーダンスの差が大きいほど大きな値を有し、散乱体の数密度が大きいほど大きな値を有すると考えられる。ミッドバンドフィットcは、傾きaと切片bから導出される間接的なパラメータであり、有効な周波数帯域内の中心におけるスペクトルの強度を与える。このため、ミッドバンドフィットcは、散乱体の大きさ、音響インピーダンスの差、散乱体の数密度に加えて、Bモード画像の輝度とある程度の相関を有していると考えられる。
統計量算出部443は、第2関心領域内における同一種類の複数の周波数特徴量の統計量として、該同一種類の複数の周波数特徴量の平均を算出する。すなわち、本実施の形態1では、該平均が第1特徴量である。第1特徴量を算出する周波数特徴量として、例えば上述した傾きa、切片b、およびミッドバンドフィットcの一種類または複数種類を用いることができる。複数種類の周波数特徴量を用いる場合には、種類ごとに第1特徴量を算出すればよい。なお、統計量算出部443が算出する統計量(第1特徴量)は、複数の周波数特徴量の分散、標準偏差、中央値、最頻値、最大値、および最小値のいずれかであってもよい。
第2特徴量算出部45は、第2関心領域の面積を第2特徴量として算出する。なお、第2特徴量として、第2関心領域の円周、直径、および半径のいずれかを適用してもよい。また、第2特徴量として、超音波画像で表示される第2関心領域である円を中心軸が通過する断面とする球の体積を適用してもよい。また、第2関心領域を楕円とする場合、その面積、周囲長、長径、短径、および該楕円を中心軸が通過する断面とする楕円体の体積のいずれかを第2特徴量としてもよい。また、第2関心領域を多角形とする場合、その面積、周囲長、対角線の最大値、および該多角形を中心軸が通過する断面とする多角柱の体積を第2特徴量としてもよい。
画像処理部5は、エコー信号の振幅を輝度に変換して表示する超音波画像であるBモード画像データを生成するBモード画像データ生成部(超音波画像データ生成部)51と、周波数特徴量を視覚情報と関連づけてBモード画像とともに表示する特徴量画像データを生成する特徴量画像データ生成部52と、第1および第2特徴量に関する情報を特徴量画像データに対応する特徴量画像とともに表示する合成画像データ生成部53と、を有する。
Bモード画像データ生成部51は、デジタル信号に対してバンドパスフィルタ、対数変換、ゲイン処理、コントラスト処理等の公知の技術を用いた信号処理を行うとともに、表示部7における画像の表示レンジに応じて定まるデータステップ幅に応じたデータの間引き等を行うことによってBモード画像データを生成する。Bモード画像は、色空間としてRGB表色系を採用した場合の変数であるR(赤)、G(緑)、B(青)の値を一致させたグレースケール画像である。
特徴量画像データ生成部52は、減衰補正部442が算出した周波数特徴量に関連する視覚情報をBモード画像データにおける画像の各画素に対して重畳することによって特徴量画像データを生成する。特徴量画像データ生成部52は、例えば図5に示す1つの振幅データ群Fj(j=1、2、・・・、K)のデータ量に対応する画素領域に対し、その振幅データ群Fjから算出される周波数スペクトルの周波数特徴量に対応する視覚情報を割り当てる。特徴量画像データ生成部52は、例えば上述した傾きa、切片b、ミッドバンドフィットcのいずれか一つに視覚情報としての色相を対応付けることによって特徴量画像を生成する。なお、特徴量画像データ生成部52が、傾きa、切片b、ミッドバンドフィットcから選択される2つの周波数特徴量の一方に色相を対応付けるとともに、他方に明暗を対応付けることによって特徴量画像データを生成するようにしてもよい。周波数特徴量に関連する視覚情報としては、例えば色相、彩度、明度、輝度値、R(赤)、G(緑)、B(青)などの所定の表色系を構成する色空間の変数を挙げることができる。
記憶部8は、第1特徴量算出部44が算出した第1特徴量および第2特徴量算出部45が算出した第2特徴量に関する情報を記憶する特徴量情報記憶部81を有する。特徴量情報記憶部81が、周波数特徴量に関する情報をさらに記憶してもよい。
記憶部8は、他にも、例えば増幅処理に必要な情報(図2に示す増幅率と受信深度との関係)、増幅補正処理に必要な情報(図3に示す増幅率と受信深度との関係)、減衰補正処理に必要な情報(式(1)参照)、周波数解析処理に必要な窓関数(Hamming、Hanning、Blackman等)の情報等を記憶する。
また、記憶部8は、超音波観測装置1の作動方法を実行するための作動プログラムを含む各種プログラムを記憶する。作動プログラムは、ハードディスク、フラッシュメモリ、CD-ROM、DVD-ROM、フレキシブルディスク等のコンピュータ読み取り可能な記録媒体に記録して広く流通させることも可能である。なお、上述した各種プログラムは、通信ネットワークを介してダウンロードすることによって取得することも可能である。ここでいう通信ネットワークは、例えば既存の公衆回線網、LAN(Local Area Network)、WAN(Wide Area Network)などによって実現されるものであり、有線、無線を問わない。
以上の構成を有する記憶部8は、各種プログラム等が予めインストールされたROM(Read Only Memory)、および各処理の演算パラメータやデータ等を記憶するRAM(Random Access Memory)等を用いて実現される。
制御部9は、演算および制御機能を有するCPU(Central Proccesing Unit)や各種演算回路等を用いて実現される。制御部9は、記憶部8が記憶、格納する情報を記憶部8から読み出し、超音波観測装置1の作動方法に関連した各種演算処理を実行することによって超音波観測装置1を統括して制御する。なお、制御部9と演算部4を、共通のCPU等を用いて構成することも可能である。
図8は、以上の構成を有する超音波観測装置1が行う処理の概要を示すフローチャートである。超音波観測装置1は、まず超音波探触子2によって新規の観測対象である検体の測定を行う(ステップS1)。具体的には、超音波探触子2の超音波振動子21は、電気的なパルス信号を超音波パルスへ変換し、検体へ順次送信する。超音波パルスは検体によってそれぞれ反射され、超音波エコーが生じる。超音波振動子21は、超音波エコーを電気的なエコー信号に変換する。この際、パルス信号の周波数帯域は、超音波振動子21におけるパルス信号の超音波パルスへの電気音響変換の線形応答周波数帯域をほぼカバーする広帯域にするとよい。それにより、後述する周波数スペクトルの近似処理において、精度のよい近似を行うことが可能となる。
超音波探触子2からエコー信号を受信した信号増幅部31は、そのエコー信号の増幅を行う(ステップS2)。ここで、信号増幅部31は、例えば図2に示す増幅率と受信深度との関係に基づいてエコー信号の増幅(STC補正)を行う。この際、信号増幅部31におけるエコー信号の各種処理周波数帯域は、超音波振動子21による超音波エコーのエコー信号への音響電気変換の線型応答周波数帯域をほぼカバーする広帯域にするとよい。これも、後述する周波数スペクトルの近似処理において精度のよい近似を行うことを可能とするためである。
続いて、Bモード画像データ生成部51は、信号増幅部31が増幅したエコー信号を用いてBモード画像データを生成する(ステップS3)。その後、制御部9は、生成されたBモード画像データに対応するBモード画像を表示部7に表示させる(ステップS4)。
この後、関心領域設定部42は、第1関心領域を設定する(ステップS5)。関心領域設定部42は、例えばBモード画像の中央部に所定の形状および大きさの第1関心領域を初期設定し、その第1関心領域を、制御部9の制御のもと表示部7に表示させる。その後、入力部6が第1関心領域の位置および大きさを変更する設定信号の入力を受け付けた場合、関心領域設定部42は、その設定信号に基づいて第1関心領域の位置および大きさを変更する。
増幅補正部41は、送受信部3から出力された信号に対して受信深度によらず増幅率が一定となる増幅補正を行う(ステップS6)。ここで、増幅補正部41は、例えば図3に示す増幅率と受信深度との関係に基づいて増幅補正を行う。
この後、周波数解析部43は、第1関心領域内の全ての振幅データ群に対し、FFT演算による周波数解析を行うことによって周波数スペクトルを算出する(ステップS7)。図9は、ステップS7において周波数解析部43が実行する処理の概要を示すフローチャートである。以下、図9に示すフローチャートを参照して、周波数解析処理を詳細に説明する。
まず、周波数解析部43は、解析対象の音線を識別するカウンタkをk0とする(ステップS21)。
続いて、周波数解析部43は、FFT演算用に取得する一連のデータ群(振幅データ群)を代表するデータ位置(受信深度に相当)Z(k)の初期値Z(k)
0を設定する(ステップS22)。例えば、図5では、上述したように、音線SRkの1番目のデータ位置を初期値Z(k)
0として設定した場合を示している。
その後、周波数解析部43は、データ位置Z(k)が属する振幅データ群を取得し(ステップS23)、取得した振幅データ群に対し、記憶部8が記憶する窓関数を作用させる(ステップS24)。このように振幅データ群に対して窓関数を作用させることにより、振幅データ群が境界で不連続になることを回避し、アーチファクトが発生するのを防止することができる。
続いて、周波数解析部43は、データ位置Z(k)の振幅データ群が正常なデータ群であるか否かを判定する(ステップS25)。図5を参照した際に説明したように、振幅データ群は、2のべき乗のデータ数を有している必要がある。以下、正常な振幅データ群のデータ数を2n(nは正の整数)とする。本実施の形態1では、データ位置Z(k)が、できるだけZ(k)が属する振幅データ群の中心になるよう設定される。具体的には、振幅データ群のデータ数は2nであるので、Z(k)はその振幅データ群の中心に近い2n/2(=2n-1)番目の位置に設定される。この場合、振幅データ群が正常であるとは、データ位置Z(k)の前方に2n-1-1(=Nとする)個のデータがあり、データ位置Z(k)の後方に2n-1(=Mとする)個のデータがあることを意味する。図5に示す場合、振幅データ群F2、F3はともに正常である。なお、図5ではn=4(N=7,M=8)の場合を例示している。
ステップS25における判定の結果、データ位置Z(k)の振幅データ群が正常である場合(ステップS25:Yes)、周波数解析部43は、後述するステップS27へ移行する。
ステップS25における判定の結果、データ位置Z(k)の振幅データ群が正常でない場合(ステップS25:No)、周波数解析部43は、不足分だけゼロデータを挿入することによって正常な振幅データ群を生成する(ステップS26)。ステップS25において正常でないと判定された振幅データ群(例えば図5の振幅データ群F1、FK)は、ゼロデータを追加する前に窓関数が作用されている。このため、振幅データ群にゼロデータを挿入してもデータの不連続は生じない。ステップS26の後、周波数解析部43は、後述するステップS27へ移行する。
ステップS27において、周波数解析部43は、振幅データ群を用いてFFT演算を行うことにより、振幅の周波数分布である周波数スペクトルを得る(ステップS27)。図6に示す周波数スペクトルC1は、ステップS27の結果として得られる周波数スペクトルの一例である。
続いて、周波数解析部43は、データ位置Z(k)をステップ幅Dで変化させる(ステップS28)。ステップ幅Dは、記憶部8が予め記憶しているものとする。図5では、D=15の場合を例示している。ステップ幅Dは、Bモード画像データ生成部51がBモード画像データを生成する際に利用するデータステップ幅と一致させることが望ましいが、周波数解析部43における演算量を削減したい場合には、ステップ幅Dとしてデータステップ幅より大きい値を設定してもよい。
その後、周波数解析部43は、データ位置Z(k)が音線SRkにおける最大値Z(k)
maxより大きいか否かを判定する(ステップS29)。データ位置Z(k)が最大値Z(k)
maxより大きい場合(ステップS29:Yes)、周波数解析部43はカウンタkを1増加させる(ステップS30)。これは、処理をとなりの音線へ移すことを意味する。一方、データ位置Z(k)が最大値Z(k)
max以下である場合(ステップS29:No)、周波数解析部43はステップS23へ戻る。このようにして、周波数解析部43は、音線SRkに対して、[(Z(k)
max-Z(k)
0+1)/D+1]個の振幅データ群に対するFFT演算を行う。ここで、[X]は、Xを超えない最大の整数を表す。
ステップS30の後、周波数解析部43は、カウンタkが最大値kmaxより大きいか否かを判定する(ステップS31)。カウンタkがkmaxより大きい場合(ステップS31:Yes)、周波数解析部43は一連のFFT処理を終了する。一方、カウンタkがkmax以下である場合(ステップS31:No)、周波数解析部43はステップS22に戻る。
このようにして、周波数解析部43は、第1関心領域内の(kmax-k0+1)本の音線の各々について複数回のFFT演算を行う。
以上説明したステップS7の周波数解析処理に続いて、近似部441は、周波数解析部43が算出した複数の周波数スペクトルをそれぞれ回帰分析することにより、各周波数スペクトルに対応する近似周波数特徴量を算出し、算出結果を特徴量情報記憶部81へ格納する(ステップS8)。具体的には、近似部441は、各周波数スペクトルを回帰分析することによって一次式で近似し、近似周波数特徴量として傾きa0、切片b0、ミッドバンドフィットc0を算出する。例えば、図7に示す直線L10は、近似部441が周波数帯域Fの周波数スペクトルC1に対し回帰分析によって近似した回帰直線である。
この後、減衰補正部442は、近似部441が各周波数スペクトルに対して近似した近似周波数特徴量に対し、減衰率αとして減衰補正を行うことにより、周波数特徴量を算出して、特徴量情報記憶部81へ格納する(ステップS9)。図7に示す直線L1は、減衰補正部442が減衰補正処理を行うことによって得られる直線の例である。
ステップS9において、減衰補正部442は、上述した式(2)、(4)における受信深度zに、超音波信号の音線のデータ配列を用いて得られるデータ位置Z=(fsp/2vs)Dnを代入することによって算出する。ここで、fspはデータのサンプリング周波数、vsは音速、Dはデータステップ幅、nは処理対象の振幅データ群のデータ位置までの音線の1番目のデータからのデータステップ数である。例えば、データのサンプリング周波数fspを50MHzとし、音速vsを1530m/secとし、図5に示すデータ配列を採用してステップ幅Dを15とすると、z=0.2295n(mm)となる。
特徴量画像データ生成部52は、Bモード画像データ生成部51が生成したBモード画像データにおける第1関心領域内の各画素に対して、周波数特徴量に関連づけた視覚情報(例えば色相)を重畳することによって特徴量画像データを生成する(ステップS10)。
この後、表示部7は、制御部9の制御のもと、特徴量画像データ生成部52が生成した特徴量画像データに対応する特徴量画像を表示する(ステップS11)。なお、表示部7が、特徴量画像に対応するBモード画像を特徴量画像と並べて表示するようにしてもよい。
続いて、関心領域設定部42は、第2関心領域を設定する(ステップS12)。関心領域設定部42は、例えば第1関心領域の中央部に所定の径の円形をなす第2関心領域を初期設定し、その第2関心領域を、制御部9の制御のもと表示部7に表示させる。その後、入力部6が第2関心領域の位置および大きさを変更する設定信号の入力を受け付けた場合、関心領域設定部42は、その設定信号に基づいて第2関心領域の位置および大きさを変更する。
ステップS12の後、統計量算出部443は、記憶部8から第2関心領域内の複数の周波数特徴量を取得し、その平均を第1特徴量として算出して特徴量情報記憶部81へ格納する(ステップS13)。
ステップS13と並行して、第2特徴量算出部45は、第2関心領域の面積を第2関心領域における第2特徴量として算出して特徴量情報記憶部81へ格納する(ステップS14)。
ステップS13およびS14の後、合成画像データ生成部53は、第2関心領域における第1特徴量、第2関心領域における第2特徴量および特徴量画像データを用いて合成画像データを生成する(ステップS15)。
続いて、表示部7は、制御部9の制御のもと、合成画像データに対応する合成画像を表示する(ステップS16)。図10は、表示部7が表示する合成画像の表示例を模式的に示す図である。同図に示す合成画像201は、特徴量画像202と、特徴量情報203とを表示する。特徴量画像202は、Bモード画像に対して設定された第1関心領域102の内部において、第1特徴量に関連付けられた視覚情報を重畳して表示している。図10では、第1関心領域102の内部において視覚情報が重畳されていることを斜線で模式的に示している。特徴量情報203は、第1および第2特徴量の値を含む。なお、特徴量情報203として、第2関心領域内の周波数特徴量の最大値、最小値、中央値等の情報を表示してもよい。また、特徴量情報203として表示する内容を設定する信号を入力部6が受け付け可能な構成としてもよい。
ステップS16の後、超音波観測装置1は一連の処理を終了する。
以上説明した本発明の実施の形態1によれば、設定された一つの関心領域(第2関心領域)に対して第1および第2特徴量を算出するため、異なる測定または演算を簡便な操作によって実現することができ、ユーザの負担を軽減させることができる。
また、本実施の形態1によれば、2つの特徴量を特徴量画像とともに表示するため、ユーザは表示部を見ながら多様な情報に基づいて診断を行うことが可能となる。
なお、本実施の形態1において、ステップS13における第1特徴量の算出処理と、ステップS14における第2特徴量の算出処理とを並行して実行する代わりに、順次処理するようにしてもよい。その際の処理順序は、どちらのステップが先でも構わない。
図11は、本実施の形態1の変形例に係る超音波観測装置が行う処理の概要を示すフローチャートである。本変形例では、第1関心領域に対して第1特徴量および第2特徴量を算出する。図11において、ステップS41~S49の処理は、図8を参照して説明したステップS1~S9の処理に順次対応している。
ステップS49に続くステップS50~S52は、並行して実行される。
ステップS50において、特徴量画像データ生成部52は、特徴量画像データを生成する(ステップS50)。
ステップS51において、統計量算出部443は、第1関心領域内の周波数特徴量の平均を第1関心領域における第1特徴量として算出して特徴量情報記憶部81へ格納する(ステップS51)。
ステップS52において、第2特徴量算出部45は、第1関心領域の面積を第1関心領域における第2特徴量として算出して特徴量情報記憶部81へ格納する(ステップS52)。なお、このステップS52は、関心領域設定部42が第1関心領域を設定した後に行ってもよい。
ステップS50において、特徴量画像データ生成部52は、特徴量画像データを生成する(ステップS50)。
ステップS51において、統計量算出部443は、第1関心領域内の周波数特徴量の平均を第1関心領域における第1特徴量として算出して特徴量情報記憶部81へ格納する(ステップS51)。
ステップS52において、第2特徴量算出部45は、第1関心領域の面積を第1関心領域における第2特徴量として算出して特徴量情報記憶部81へ格納する(ステップS52)。なお、このステップS52は、関心領域設定部42が第1関心領域を設定した後に行ってもよい。
ステップS50~S52の後、合成画像データ生成部53は、第1関心領域における第1および第2特徴量、ならびに特徴量画像データを用いて合成画像データを生成する(ステップS53)。その後、表示部7は、合成画像データに対応する合成画像を表示する(ステップS54)。
以上説明した本実施の形態1の変形例によれば、上述した実施の形態1と同様の効果を得ることができる。
(実施の形態2)
図12は、本発明の実施の形態2に係る超音波観測装置の構成を示すブロック図である。同図に示す超音波観測装置11は、演算部12および記憶部13の構成を除いて、上述した超音波観測装置1と同様の構成を有する。このため、超音波観測装置1と同じ構成要素には、対応する超音波観測装置1の構成要素と同一の符号を付して説明する。
図12は、本発明の実施の形態2に係る超音波観測装置の構成を示すブロック図である。同図に示す超音波観測装置11は、演算部12および記憶部13の構成を除いて、上述した超音波観測装置1と同様の構成を有する。このため、超音波観測装置1と同じ構成要素には、対応する超音波観測装置1の構成要素と同一の符号を付して説明する。
演算部12は、増幅補正部41、関心領域設定部42、周波数解析部43、第1特徴量算出部44および第2特徴量算出部45に加えて、特性判定部121を有する。特性判定部121は、第1および第2特徴量に基づいて、第2関心領域内の観測対象の特性を判定する。本実施の形態2では、観測対象を生体組織とし、その観測対象の特性として、第2関心領域内の生体組織が呈する疾患の悪性度を適用する。
記憶部13は、特徴量情報記憶部81に加えて特性判定情報記憶部131を有する。特性判定情報記憶部131は、特性判定部121が第2関心領域内の検体の特性を判定する際に参照する特性判定情報を記憶する。
図13は、特性判定情報記憶部131が記憶する特性判定情報の概要を示す図である。同図に示すテーブルTb1は、第1特徴量Mおよび第2特徴量Sの組合せと疾患の悪性度との関係を与える。具体的には、テーブルTb1は、以下の4つの関係を与える。
(1-1)第1特徴量Mが所定の閾値M0以上であり(M≧M0)、第2特徴量Sが所定の閾値S0以上である(S≧S0)場合、疾患の悪性度は「高」である。
(1-2)第1特徴量Mが閾値M0以上であり(M≧M0)、第2特徴量Sが閾値S0未満である(S<S0)場合、疾患の悪性度は「中」である。
(1-3)第1特徴量Mが閾値M0未満であり(M<M0)、第2特徴量Sが閾値S0以上である(S≧S0)場合、疾患の悪性度は「中」である。
(1-4)第1特徴量Mが閾値M0未満であり(M<M0)、第2特徴量Sが閾値S0未満である(S<S0)場合、疾患の悪性度は「低」である。
(1-1)第1特徴量Mが所定の閾値M0以上であり(M≧M0)、第2特徴量Sが所定の閾値S0以上である(S≧S0)場合、疾患の悪性度は「高」である。
(1-2)第1特徴量Mが閾値M0以上であり(M≧M0)、第2特徴量Sが閾値S0未満である(S<S0)場合、疾患の悪性度は「中」である。
(1-3)第1特徴量Mが閾値M0未満であり(M<M0)、第2特徴量Sが閾値S0以上である(S≧S0)場合、疾患の悪性度は「中」である。
(1-4)第1特徴量Mが閾値M0未満であり(M<M0)、第2特徴量Sが閾値S0未満である(S<S0)場合、疾患の悪性度は「低」である。
例えば、疾患がリンパ節腫大である場合、第1特徴量Mが大きければ、このリンパ節腫大が、他臓器の腫瘍からの転移性由来の腫大である可能性が高い。また、この場合、第2特徴量Sにより、疾患の進行度がわかる。したがって、第1特徴量Mおよび第2特徴量Sがそれぞれ閾値M0、S0以上であれば、疾患の悪性度は「高」であると判定することができる。
図14は、超音波観測装置11が行う処理の概要を示すフローチャートである。図14において、ステップS61~S74の処理は、図8を参照して説明したステップS1~S14の処理に順次対応している。
ステップS73、S74の並行処理の後、特性判定部121は、ステップS73で統計量算出部443が算出した第2関心領域における第1特徴量Mと、ステップS74で第2特徴量算出部45が算出した第2関心領域における第2特徴量Sに基づいて特性判定情報記憶部131が記憶するテーブルTb1を参照し、特性判定を行う(ステップS75)。
続いて、合成画像データ生成部53は、特徴量画像データ、第1特徴量M、第2特徴量S、および特性判定結果である疾患の悪性度を用いて合成画像データを生成する(ステップS76)。
その後、表示部7は、合成画像データに対応する合成画像を表示する(ステップS77)。図15は、表示部7が表示する合成画像の表示例を模式的に示す図である。同図に示す合成画像301は、特徴量画像202と、特徴量情報302とを表示する。特徴量情報302は、第1および第2特徴量、ならびに疾患の悪性度を含む。
以上説明した本発明の実施の形態2によれば、実施の形態1と同様、異なる測定または演算を簡便な操作によって実現することができ、ユーザの負担を軽減させることができる。
また、本実施の形態2によれば、2つの特徴量の組合せに応じて観測対象の特性を判定するため、ユーザが診断を行う際の精度を一段と向上させることができる。
なお、本実施の形態2において、特性判定情報として、複数種類の周波数特徴量に対して第1特徴量をそれぞれ算出し、複数の第1特徴量と第2特徴量の組合せと疾患の悪性度を対応づけてもよい。
また、本実施の形態2において、第2特徴量算出部45が、第1関心領域の全域において第2特徴量を算出するようにしてもよい。
(実施の形態3)
図16は、本発明の実施の形態3に係る超音波観測装置の構成を示すブロック図である。同図に示す超音波観測装置14は、演算部15の構成を除いて、上述した超音波観測装置11と同様の構成を有する。このため、超音波観測装置11と同じ構成要素には、対応する超音波観測装置11の構成要素と同一の符号を付して説明する。
図16は、本発明の実施の形態3に係る超音波観測装置の構成を示すブロック図である。同図に示す超音波観測装置14は、演算部15の構成を除いて、上述した超音波観測装置11と同様の構成を有する。このため、超音波観測装置11と同じ構成要素には、対応する超音波観測装置11の構成要素と同一の符号を付して説明する。
演算部15は、増幅補正部41、関心領域設定部42、周波数解析部43、第1特徴量算出部44、第2特徴量算出部45、特性判定部121に加えて、第3特徴量算出部151を有する。
第3特徴量算出部151は、特徴量情報記憶部81が記憶する第2特徴量の情報を参照して、同一の観測対象に対して異なる時間に算出され、互いに対応する第2関心領域における第2特徴量の時間変化に関する情報を算出する。本実施の形態3では、第2関心領域の直径を第2特徴量とし、第2関心領域の直径が2倍になるまでの倍加時間(Doubling Time)を第3特徴量とする。第3特徴量算出部151は、最新の第2特徴量と、その一つ前に行った検査に基づいて算出された第2特徴量とを用いて第3特徴量を算出する。なお、第3特徴量算出部151が第3特徴量を算出する際の2つの第2特徴量の基準となる時間間隔を予め設定しておき、最新の第2特徴量に対して、その時間間隔に最も近い第2特徴量を特徴量情報記憶部81から取得して第3特徴量を算出するようにしてもよい。
図17は、特徴量情報記憶部81が記憶する第2特徴量の履歴情報の概要を示す図である。同図に示すテーブルTb2は、同一検体の検査日時と、検査で算出された第2特徴量(第2関心領域の直径)とを対応づけている。
図18は、特性判定情報記憶部131が記憶する特性判定情報の概要を示す図である。同図に示すテーブルTb3は、第1特徴量Mおよび第3特徴量(倍加時間)Tの組合せと疾患の悪性度の関係を与える。具体的には、テーブルTb3は、以下の4つの関係を与える。
(2-1)第1特徴量Mが所定の閾値M0以上であり(M≧M0)、第3特徴量Tが所定の閾値T0未満である(T<T0)場合、疾患の悪性度は「高」である。
(2-2)第1特徴量Mが閾値M0以上であり(M≧M0)、第3特徴量Tが閾値T0以上である(T≧T0)場合、疾患の悪性度は「中」である。
(2-3)第1特徴量Mが閾値M0未満であり(M<M0)、第3特徴量Tが閾値T0未満である(T<T0)場合、疾患の悪性度は「中」である。
(2-4)第1特徴量Mが閾値M0未満であり(M<M0)、第3特徴量Tが閾値T0以上である(T≧T0)場合、疾患の悪性度は「低」である。
(2-1)第1特徴量Mが所定の閾値M0以上であり(M≧M0)、第3特徴量Tが所定の閾値T0未満である(T<T0)場合、疾患の悪性度は「高」である。
(2-2)第1特徴量Mが閾値M0以上であり(M≧M0)、第3特徴量Tが閾値T0以上である(T≧T0)場合、疾患の悪性度は「中」である。
(2-3)第1特徴量Mが閾値M0未満であり(M<M0)、第3特徴量Tが閾値T0未満である(T<T0)場合、疾患の悪性度は「中」である。
(2-4)第1特徴量Mが閾値M0未満であり(M<M0)、第3特徴量Tが閾値T0以上である(T≧T0)場合、疾患の悪性度は「低」である。
例えば、疾患が粘膜下腫瘍である場合、進展速度が速く倍加時間Tが小さいものほど肉腫などの悪性組織である可能性が高い。加えて、第1特徴量Mの値が大きいほど悪性組織てある可能性が高い。したがって、第1特徴量Mが閾値M0より大きく、第3特徴量Tが閾値T0未満であれば、疾患の悪性度は「高」であると判定することができる。
図19は、超音波観測装置14が行う処理の概要を示すフローチャートである。図19において、ステップS81~S92の処理は、図8を参照して説明したステップS1~S12の処理に順次対応している。本実施の形態3においては、関心領域設定部42が、ステップS85における第1関心領域の設定処理およびステップS92における第2関心領域の設定処理において、同一検体の前回検査時に設定された第1および第2関心領域の位置をそれぞれ初期設定して表示するようにするようにしてもよい。これにより、ユーザは、前回検査時に注目した領域を即座に認識することができる。
ステップS92に続くステップS93と、S94~S95とは、並行して処理される。
ステップS93において、統計量算出部443は、特徴量情報記憶部81から第2関心領域内の周波数特徴量を取得し、その平均を第2関心領域における第1特徴量として算出して特徴量情報記憶部81へ格納する(ステップS93)。
ステップS93において、統計量算出部443は、特徴量情報記憶部81から第2関心領域内の周波数特徴量を取得し、その平均を第2関心領域における第1特徴量として算出して特徴量情報記憶部81へ格納する(ステップS93)。
ステップS94において、第2特徴量算出部45は、第2関心領域の直径を第2関心領域における第2特徴量として算出し、検査日時とともに特徴量情報記憶部81へ格納する(ステップS94)。なお、このステップS94は、関心領域設定部42が第1関心領域を設定した後に行ってもよい。
ステップS94に続いて、第3特徴量算出部151は、特徴量情報記憶部81から過去の第2特徴量を取得し、取得した第2特徴量とステップS94で算出した第2特徴量とを用いて、第3特徴量としての倍加時間を算出して特徴量情報記憶部81へ格納する(ステップS95)。
ステップS94に続いて、第3特徴量算出部151は、特徴量情報記憶部81から過去の第2特徴量を取得し、取得した第2特徴量とステップS94で算出した第2特徴量とを用いて、第3特徴量としての倍加時間を算出して特徴量情報記憶部81へ格納する(ステップS95)。
ステップS93およびS94~S95の並行処理の後、特性判定部121は、ステップS93で統計量算出部443が算出した第2関心領域における第1特徴量Mと、ステップS95で第3特徴量算出部151が算出した第3特徴量Tとに基づいて、特性判定情報記憶部131が記憶するテーブルTb3を参照し、特性判定を行う(ステップS96)。
続いて、合成画像データ生成部53は、第1特徴量M、第3特徴量T、特性判定結果である疾患の悪性度、および特徴量画像データを用いて合成画像データを生成する(ステップS97)。
その後、表示部7は、合成画像データに対応する合成画像を表示する(ステップS98)。表示部7が表示する合成画像は、図15に示す合成画像301において、さらに第3特徴量を表示したものに相当する。
以上説明した本発明の実施の形態3によれば、実施の形態1と同様、異なる測定または演算を簡便な操作によって実現することができ、ユーザの負担を軽減させることができる。
また、本実施の形態3によれば、2つの特徴量の組合せに応じて観測対象の特性を判定するため、ユーザが診断を行う際の精度を一段と向上させることができる。特に、本実施の形態3によれば、時間的な変化の態様を示す特徴量(第3特徴量)を用いて判定を行うため、このような時間的な変化が特に重要な指標となるような観測対象の診断を行うのに好適である。
なお、本実施の形態3において、第1~第3特徴量の組合せと疾患の悪性度を関連付けたテーブルを用いて特定判定を行うようにしてもよい。
また、本実施の形態3においても、第2特徴量算出部45が、第1関心領域の全域において第2特徴量を算出するようにしてもよい。
本実施の形態3において、第3特徴量算出部151が第3特徴量を算出する際に必要な第1特徴量の過去の履歴情報を記憶する外部装置から通信ネットワークを介して取得するようにしてもよい。図20は、本実施の形態3の変形例に係る超音波観測装置の構成を示すブロック図である。同図に示す超音波観測装置16は、上述した超音波観測装置14の構成に加えて、通信ネットワークを介して外部装置と情報の送受信を行う通信部17を備える。超音波観測装置16は、最新の超音波エコーに対応する各種情報を、通信部17を介して外部装置へ送信する一方、第3特徴量の算出に必要な過去の検査における第1特徴量の情報を外部装置から受信する。
本変形例によれば、特徴量情報記憶部81は、最新の超音波エコーに対応する情報を一時的に記憶しておくだけでよい。したがって、検査データの蓄積による記憶部13の記憶量の増大を抑制することができる。
また、本実施の形態3において、第3特徴量は倍加時間に限られるわけではなく、例えば第1特徴量の時間変化率を適用することもできる。図21は、第3特徴量として第1特徴量の時間変化率を適用する場合に特性判定情報記憶部131が記憶する特性判定情報の概要を示す図である。同図に示すテーブルTb4は、第2特徴量として第2関心領域の面積Sを適用し、第3特徴量として第1特徴量(第2関心領域における周波数特徴量の平均)の時間変化率M’を適用した場合の組織の悪性度の関係を与える。具体的には、テーブルTb4は、以下の4つの関係を与える。
(3-1)第2特徴量Sが所定の閾値S0以上であり(S≧S0)、第3特徴量M’が所定の閾値M’0以上である(M’≧M’0)場合、疾患の悪性度は「高」である。
(3-2)第2特徴量Sが閾値S0以上であり(S≧S0)、第3特徴量M’が閾値M’0未満である(M’<M’0)場合、疾患の悪性度は「中」である。
(3-3)第2特徴量Sが閾値S0未満であり(S<S0)、第3特徴量M’が閾値M’0以上である(M’≧M’0)場合、疾患の悪性度は「中」である。
(3-4)第2特徴量Sが閾値S0未満であり(S<S0)、第3特徴量M’が閾値M’0未満である(M’<M’0)場合、疾患の悪性度は「低」である。
(3-1)第2特徴量Sが所定の閾値S0以上であり(S≧S0)、第3特徴量M’が所定の閾値M’0以上である(M’≧M’0)場合、疾患の悪性度は「高」である。
(3-2)第2特徴量Sが閾値S0以上であり(S≧S0)、第3特徴量M’が閾値M’0未満である(M’<M’0)場合、疾患の悪性度は「中」である。
(3-3)第2特徴量Sが閾値S0未満であり(S<S0)、第3特徴量M’が閾値M’0以上である(M’≧M’0)場合、疾患の悪性度は「中」である。
(3-4)第2特徴量Sが閾値S0未満であり(S<S0)、第3特徴量M’が閾値M’0未満である(M’<M’0)場合、疾患の悪性度は「低」である。
(その他の実施の形態)
ここまで、本発明を実施するための形態を説明してきたが、本発明は上述した実施の形態によってのみ限定されるべきものではない。例えば、特性判定部121が判定する観測対象の特性は、疾患の悪性度以外でもよい。
ここまで、本発明を実施するための形態を説明してきたが、本発明は上述した実施の形態によってのみ限定されるべきものではない。例えば、特性判定部121が判定する観測対象の特性は、疾患の悪性度以外でもよい。
また、合成画像において、観測対象の特性を文字で表現する代わりに、絵や記号等の情報を用いて表現するようにしてもよいし、観測対象の特性を視覚情報と関連づけてBモード画像に重畳して表示するようにしてもよい。後者の場合には、生成した重畳画像を特徴量画像と並べて表示するようにしてもよいし、特徴量画像との間で選択的に表示するようにしてもよい。
また、減衰補正部442が周波数スペクトルを減衰補正した後、近似部441が減衰補正後の周波数スペクトルに対して回帰分析を行うことによって周波数特徴量を算出するようにしてもよい。
このように、本発明は、請求の範囲に記載した技術的思想を逸脱しない範囲内において、様々な実施の形態を含みうるものである。
1、11、14、16 超音波観測装置
2 超音波探触子
3 送受信部
4、12、15 演算部
5 画像処理部
6 入力部
7 表示部
8、13 記憶部
9 制御部
17 通信部
21 超音波振動子
31 信号増幅部
41 増幅補正部
42 関心領域設定部
43 周波数解析部
44 第1特徴量算出部
45 第2特徴量算出部
51 Bモード画像データ生成部
52 特徴量画像データ生成部
53 合成画像データ生成部
81 特徴量情報記憶部
101 Bモード画像
102 第1関心領域
103 第2関心領域
121 特性判定部
131 特性判定情報記憶部
151 第3特徴量算出部
201、301 合成画像
202 特徴量画像
203 特徴量情報
441 近似部
442 減衰補正部
443 統計量算出部
C1 周波数スペクトル
2 超音波探触子
3 送受信部
4、12、15 演算部
5 画像処理部
6 入力部
7 表示部
8、13 記憶部
9 制御部
17 通信部
21 超音波振動子
31 信号増幅部
41 増幅補正部
42 関心領域設定部
43 周波数解析部
44 第1特徴量算出部
45 第2特徴量算出部
51 Bモード画像データ生成部
52 特徴量画像データ生成部
53 合成画像データ生成部
81 特徴量情報記憶部
101 Bモード画像
102 第1関心領域
103 第2関心領域
121 特性判定部
131 特性判定情報記憶部
151 第3特徴量算出部
201、301 合成画像
202 特徴量画像
203 特徴量情報
441 近似部
442 減衰補正部
443 統計量算出部
C1 周波数スペクトル
Claims (14)
- 観測対象に対して送信した超音波が前記観測対象によって反射された超音波エコーを電気信号に変換したエコー信号に基づいて超音波画像データを生成する超音波画像データ生成部と、
前記超音波画像データに対応する超音波画像内で解析対象とする第1関心領域および該第1関心領域の少なくとも一部をなす第2関心領域を設定する関心領域設定部と、
前記第1関心領域内の前記エコー信号に基づいて生成される信号の周波数を解析することによって複数の周波数スペクトルを算出する周波数解析部と、
前記複数の周波数スペクトルの特徴をそれぞれ示す複数の周波数特徴量を算出し、該複数の周波数特徴量のうち前記第2関心領域内の前記周波数スペクトルに対応する周波数特徴量の統計量である第1特徴量を算出する第1特徴量算出部と、
前記第2関心領域の形状の特徴を示す第2特徴量を算出する第2特徴量算出部と、
前記周波数特徴量を視覚情報と関連づけて前記エコー信号から生成された超音波画像とともに表示する特徴量画像データを生成する特徴量画像データ生成部と、
前記第1および第2特徴量に関する情報を前記特徴量画像データに対応する特徴量画像とともに表示する合成画像データを生成する合成画像データ生成部と、
を備えたことを特徴とする超音波観測装置。 - 前記第1特徴量と前記第2特徴量との組合せに基づいて前記第2関心領域における前記観測対象の特性を判定する特性判定部をさらに備え、
前記合成画像データ生成部は、
前記観測対象の特性に関する情報を加えて前記合成画像データを生成することを特徴とする請求項1に記載の超音波観測装置。 - 前記第1および第2特徴量ならびに前記観測対象の特性を関連づけた特性判定情報を記憶する特性判定情報記憶部をさらに備え、
前記特性判定部は、
前記特性判定情報に基づいて前記第2関心領域における前記観測対象の特性を判定することを特徴とする請求項2に記載の超音波観測装置。 - 同一の前記観測対象に対して異なる時間に算出され、互いに対応する前記第2関心領域における前記第1および第2特徴量の一方の時間変化に関する情報を第3特徴量として算出する第3特徴量算出部と、
前記第1および第2特徴量の一方と前記第3特徴量との組合せに基づいて前記第2関心領域における前記観測対象の特性を判定する特性判定部と、
をさらに備え、
前記合成画像データ生成部は、
前記第3特徴量および前記第2関心領域における前記観測対象の特性に関する情報を加えて前記合成画像データを生成することを特徴とする請求項1に記載の超音波観測装置。 - 前記第1および第2特徴量の一方、前記第3特徴量ならびに前記観測対象の特性を関連づけた特性判定情報を記憶する特性判定情報記憶部をさらに備え、
前記特性判定部は、
前記特性判定情報に基づいて前記第2関心領域における前記観測対象の特性を判定することを特徴とする請求項4に記載の超音波観測装置。 - 前記第3特徴量の算出に必要な前記第1および第2特徴量の一方の履歴情報を記憶する外部装置と通信ネットワークを介して情報の送受信を行う通信部をさらに備え、
前記第3特徴量算出部は、
前記通信部が受信した前記第1および第2特徴量の一方の履歴情報を用いて前記第3特徴量を算出することを特徴とする請求項4に記載の超音波観測装置。 - 前記観測対象は生体組織であり、前記観測対象の特性は該観測対象が呈する疾患の程度であることを特徴とする請求項2~6のいずれか一項に記載の超音波観測装置。
- 前記第1特徴量は、前記第2関心領域内の前記周波数スペクトルに対応する周波数特徴量の平均、分散、標準偏差、中央値、最頻値、最大値および最小値のいずれか一つであることを特徴とする請求項1~7のいずれか一項に記載の超音波観測装置。
- 前記第2特徴量は、前記第2関心領域の面積、周囲長、該領域を中心軸が通過する断面として推定される3次元領域の体積、該領域が円である場合の直径または半径、該領域が楕円である場合の長径または短径、および該領域が多角形である場合の対角線の最大値、のいずれか一つであることを特徴とする請求項1~8のいずれか一項に記載の超音波観測装置。
- 前記第1および第2特徴量算出部が前記第1および第2特徴量をそれぞれ算出する処理を並列に実行させる制御部をさらに備えたことを特徴とする請求項1~9のいずれか一項に記載の超音波観測装置。
- 前記第2関心領域は、前記第1関心領域と同じ領域であることを特徴とする請求項1~10のいずれか一項に記載の超音波観測装置。
- 前記合成画像データに対応する合成画像を表示する表示部をさらに備えたことを特徴とする請求項1~11のいずれか一項に記載の超音波観測装置。
- 超音波画像データ生成部が、観測対象に対して送信した超音波が前記観測対象によって反射された超音波エコーを電気信号に変換したエコー信号に基づいて超音波画像データを生成する超音波画像データ生成ステップと、
関心領域設定部が、前記超音波画像データに対応する超音波画像内で解析対象とする第1関心領域を設定する第1関心領域設定ステップと、
周波数解析部が、前記第1関心領域内の前記エコー信号に基づいて生成される信号の周波数を解析することによって複数の周波数スペクトルを算出する周波数解析ステップと、
第1特徴量算出部が、前記複数の周波数スペクトルの特徴をそれぞれ示す複数の周波数特徴量を算出する周波数特徴量算出ステップと、
特徴量画像データ生成部が、前記周波数特徴量を視覚情報と関連づけて前記エコー信号から生成された超音波画像とともに表示する特徴量画像データを生成する特徴量画像データ生成ステップと、
前記関心領域設定部が、前記第1関心領域の少なくとも一部をなす第2関心領域を設定する第2関心領域設定ステップと、
前記第1特徴量算出部が、前記第2関心領域内の前記周波数スペクトルに対応する前記周波数特徴量の統計量である第1特徴量を算出する第1特徴量算出ステップと、
第2特徴量算出部が、前記第2関心領域の形状の特徴を示す第2特徴量を算出する第2特徴量算出ステップと、
合成画像データ生成部が、前記第1および第2特徴量に関する情報を前記特徴量画像データに対応する特徴量画像とともに表示する合成画像データを生成する合成画像データ生成ステップと、
を有することを特徴とする超音波観測装置の作動方法。 - 超音波画像データ生成部が、観測対象に対して送信した超音波が前記観測対象によって反射された超音波エコーを電気信号に変換したエコー信号に基づいて超音波画像データを生成する超音波画像データ生成ステップと、
関心領域設定部が、前記超音波画像データに対応する超音波画像内で解析対象とする第1関心領域を設定する第1関心領域設定ステップと、
周波数解析部が、前記第1関心領域内の前記エコー信号に基づいて生成される信号の周波数を解析することによって複数の周波数スペクトルを算出する周波数解析ステップと、
第1特徴量算出部が、前記複数の周波数スペクトルの特徴をそれぞれ示す複数の周波数特徴量を算出する周波数特徴量算出ステップと、
特徴量画像データ生成部が、前記周波数特徴量を視覚情報と関連づけて前記エコー信号から生成された超音波画像とともに表示する特徴量画像データを生成する特徴量画像データ生成ステップと、
前記関心領域設定部が、前記第1関心領域の少なくとも一部をなす第2関心領域を設定する第2関心領域設定ステップと、
前記第1特徴量算出部が、前記第2関心領域内の前記周波数スペクトルに対応する前記周波数特徴量の統計量である第1特徴量を算出する第1特徴量算出ステップと、
第2特徴量算出部が、前記第2関心領域の形状の特徴を示す第2特徴量を算出する第2特徴量算出ステップと、
合成画像データ生成部が、前記第1および第2特徴量に関する情報を前記特徴量画像データに対応する特徴量画像とともに表示する合成画像データを生成する合成画像データ生成ステップと、
を超音波観測装置に実行させることを特徴とする超音波観測装置の作動プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015544243A JPWO2015198713A1 (ja) | 2014-06-27 | 2015-04-24 | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014133326 | 2014-06-27 | ||
| JP2014-133326 | 2014-06-27 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015198713A1 true WO2015198713A1 (ja) | 2015-12-30 |
Family
ID=54937812
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/062616 WO2015198713A1 (ja) | 2014-06-27 | 2015-04-24 | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2015198713A1 (ja) |
| WO (1) | WO2015198713A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113329696A (zh) * | 2019-01-30 | 2021-08-31 | 奥林巴斯株式会社 | 超声波观测装置、超声波观测装置的工作方法以及超声波观测装置的工作程序 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10258050A (ja) * | 1997-03-17 | 1998-09-29 | Olympus Optical Co Ltd | 超音波画像診断装置 |
| JP2005349003A (ja) * | 2004-06-11 | 2005-12-22 | Toshiba Corp | 超音波診断装置 |
| JP2007097671A (ja) * | 2005-09-30 | 2007-04-19 | Toshiba Corp | 画像診断支援装置、及び画像診断支援プログラム |
| JP2008142151A (ja) * | 2006-12-07 | 2008-06-26 | Matsushita Electric Ind Co Ltd | 超音波診断装置および超音波診断システム |
| WO2012063976A1 (ja) * | 2010-11-11 | 2012-05-18 | オリンパスメディカルシステムズ株式会社 | 超音波診断装置、超音波診断装置の作動方法および超音波診断装置の作動プログラム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08293025A (ja) * | 1995-04-20 | 1996-11-05 | Olympus Optical Co Ltd | 画像分類装置 |
| JP2008523876A (ja) * | 2004-12-17 | 2008-07-10 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 医療用診断イメージングにおいて医療的に有意味の記述を生成するための高性能分類器を自動的に確立するための方法及び装置 |
| JP6081139B2 (ja) * | 2011-12-26 | 2017-02-15 | 東芝メディカルシステムズ株式会社 | 超音波診断装置、医用画像処理装置、及び医用画像処理方法 |
| KR101580254B1 (ko) * | 2012-03-14 | 2015-12-24 | 삼성전자 주식회사 | 주파수 영역에서의 의료 영상 진단 장치 및 방법 |
-
2015
- 2015-04-24 WO PCT/JP2015/062616 patent/WO2015198713A1/ja active Application Filing
- 2015-04-24 JP JP2015544243A patent/JPWO2015198713A1/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10258050A (ja) * | 1997-03-17 | 1998-09-29 | Olympus Optical Co Ltd | 超音波画像診断装置 |
| JP2005349003A (ja) * | 2004-06-11 | 2005-12-22 | Toshiba Corp | 超音波診断装置 |
| JP2007097671A (ja) * | 2005-09-30 | 2007-04-19 | Toshiba Corp | 画像診断支援装置、及び画像診断支援プログラム |
| JP2008142151A (ja) * | 2006-12-07 | 2008-06-26 | Matsushita Electric Ind Co Ltd | 超音波診断装置および超音波診断システム |
| WO2012063976A1 (ja) * | 2010-11-11 | 2012-05-18 | オリンパスメディカルシステムズ株式会社 | 超音波診断装置、超音波診断装置の作動方法および超音波診断装置の作動プログラム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113329696A (zh) * | 2019-01-30 | 2021-08-31 | 奥林巴斯株式会社 | 超声波观测装置、超声波观测装置的工作方法以及超声波观测装置的工作程序 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2015198713A1 (ja) | 2017-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5897227B1 (ja) | 医用診断装置、医用診断装置の作動方法および医用診断装置の作動プログラム | |
| JP5974210B2 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| WO2016151951A1 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP5948527B1 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| WO2018142937A1 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP6513224B2 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP7046502B2 (ja) | 超音波観測装置 | |
| JP6289772B2 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP6892320B2 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP2016202567A (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP5881918B1 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| WO2016181869A1 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| WO2015198713A1 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP6157790B1 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP2017113145A (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP6010274B1 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP5981072B1 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP6138402B2 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP6253572B2 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP5953457B1 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP5932184B1 (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム | |
| JP2017217313A (ja) | 超音波観測装置、超音波観測装置の作動方法および超音波観測装置の作動プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2015544243 Country of ref document: JP Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15811410 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15811410 Country of ref document: EP Kind code of ref document: A1 |