WO2015194609A1 - Dispositif support rotatif - Google Patents
Dispositif support rotatif Download PDFInfo
- Publication number
- WO2015194609A1 WO2015194609A1 PCT/JP2015/067525 JP2015067525W WO2015194609A1 WO 2015194609 A1 WO2015194609 A1 WO 2015194609A1 JP 2015067525 W JP2015067525 W JP 2015067525W WO 2015194609 A1 WO2015194609 A1 WO 2015194609A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- magnetostrictive
- magnetostrictive effect
- sensor
- magnetic
- outer ring
- Prior art date
Links
Images


























































Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/52—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions
- F16C19/522—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions related to load on the bearing, e.g. bearings with load sensors or means to protect the bearing against overload
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C33/00—Parts of bearings; Special methods for making bearings or parts thereof
- F16C33/30—Parts of ball or roller bearings
- F16C33/58—Raceways; Race rings
- F16C33/583—Details of specific parts of races
- F16C33/586—Details of specific parts of races outside the space between the races, e.g. end faces or bore of inner ring
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0009—Force sensors associated with a bearing
- G01L5/0023—Force sensors associated with a bearing by using magnetic sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/02—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows
- F16C19/04—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for radial load mainly
- F16C19/06—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for radial load mainly with a single row or balls
Definitions
- the present invention relates to a rotation support device.
- Patent Document 1 describes an apparatus for measuring torque transmitted by a rotating shaft.
- a rolling bearing is provided for rotatably supporting the rotating shaft with respect to the housing.
- a strain gauge is bonded to an outer ring that is a stationary ring constituting the rolling bearing, and torque is measured based on an output signal of the strain gauge.
- the specific torque measurement principle according to this conventional structure is as follows. First, the outer ring is distorted according to the load of the rolling bearing, and this load changes according to the torque. Therefore, if the relationship between the strain gauge output signal and the load load and the relationship between the load load and the torque are examined in advance, the torque can be obtained from the strain gauge output signal using these relationships.
- Patent Document 2 describes a device for measuring torque transmitted by a rotating shaft.
- a ring having a magnetostriction that is externally fitted to a rotating shaft is magnetized in the circumferential direction.
- the sensor provided with the Hall element etc. as a detection part is arrange
- Patent Document 2 When the conventional structure of Patent Document 2 is used in combination with a bearing for rotatably supporting the rotating shaft, if a sliding bearing is used as the bearing, the friction loss of the sliding bearing is large, and therefore the torque transmission efficiency is increased. Deteriorate.
- the ring that is the magnetostrictive effect portion is made of magnetic steel such as bearing steel
- precipitates in the magnetic steel become a concentration source of stress.
- the inverse magnetostriction characteristic (relationship between applied stress and magnetic permeability) of the magnetostrictive effect portion becomes unstable, and as a result, it becomes difficult to perform highly accurate torque measurement.
- the types of precipitates contained in the magnetic steel include carbides and nitrides. Carbon and nitrogen, which are carbide and nitride-forming elements, are additive elements that improve the strength of steel members.
- a non-metal is attached to the mounting surface, which is a portion of the outer peripheral surface of the rotating shaft on which the torque acts, and the ring is fitted and fixed (the inner peripheral surface of the ring is in contact). If there are stress-concentrated parts such as irregularities based on inclusions or surface roughness, local plastic deformation will occur around the non-metallic inclusions and in the recesses (valleys), which will contact the mounting surface. A local permanent distortion occurs in the ring. For this reason, the measurement accuracy of torque deteriorates. Therefore, in order to perform highly accurate torque measurement, it is important to reduce the size of non-metallic inclusions present on the mounting surface and the roughness of the mounting surface.
- the present invention was invented in order to realize a rotation support device capable of measuring a load in view of the above-described circumstances.
- the rotation support device of the present invention may include a rolling bearing and a sensor.
- the rolling bearing has a magnetostriction effect portion whose magnetic permeability changes at least in part according to a load (that is, exhibits an inverse magnetostriction effect), is supported by a housing or the like, and does not rotate during use, And a plurality of rolling elements that roll on a track formed in a part of the stationary body.
- each of these rolling elements rolls on a raceway formed on a part of this stationary body, and on a raceway formed on a rotating wheel added to a component of a rolling bearing, or a rotary shaft, etc. Roll on a track formed in the rotating member.
- the senor is supported by a portion that does not rotate even when a housing or a stationary body is used, in a state of being disposed close to the magnetostrictive effect portion, passes through (penetrates) its own detection portion, and passes through the magnetostrictive effect portion.
- the output signal is changed according to the magnetic flux that changes depending on the magnetic susceptibility.
- the magnetostrictive effect portion is made of magnetic steel, and the number of non-metallic inclusions having a square root of 5 ⁇ m or more in the area of 100 mm 2 of the surface of the magnetostrictive effect portion is 1000 or less (preferably, 500 or less).
- the number of the said nonmetallic inclusion can be adjusted with the density
- the oxygen concentration is 20 ppm or less (preferably 15 ppm or less)
- the titanium concentration is 100 ppm or less (preferably 50 ppm or less)
- the sulfur concentration is 0.05% or less (preferably 0.00. 03% or less) magnetic steel.
- the arithmetic average roughness Ra of at least a part of the surface of the magnetostrictive effect part for example, a part where the density of the magnetic flux entering and exiting during use is larger than the other part, or a part facing the sensor detection part.
- Ra arithmetic average roughness
- the stationary body can be composed of only a stationary wheel that is a member directly forming a track, and this stationary wheel can function as a magnetostrictive effect portion.
- this stationary wheel can function as a magnetostrictive effect portion.
- the outer width dimension of the stationary ring in the direction perpendicular to the acting direction of the load load in the virtual plane including the central axis of the stationary wheel is determined by the action of the load load. It is possible to employ a configuration in which a part of the direction is smaller than the other part. By adopting such a configuration, it is possible to increase the change in the output signal of the sensor with respect to the change in the load load by increasing the stress applied to a part of the portion.
- the stationary body can be formed by combining a stationary ring that is a member directly forming a track and a magnetostrictive effect material that functions as a magnetostrictive effect portion.
- the magnetostrictive effect material is configured in an annular shape, and the magnetostrictive effect material is fitted and fixed to the stationary wheel by an interference fit (the portion of the surface of the stationary ring where the magnetostrictive effect material is fitted and fixed is attached) Composition)
- A2) a configuration in which the magnetostrictive effect material is disposed inside a concave portion such as a concave groove formed on the surface of the stationary ring (a configuration in which the inner surface of the concave portion is an attachment surface)
- A3 A configuration in which the magnetostrictive effect material is disposed at a position sandwiched between a stationary wheel and a portion that does not rotate even when the housing is used with respect to the direction of load application of the rolling bearing (of the surface of the stationary wheel, A
- the outer width dimension of the magnetostrictive effect material in the direction perpendicular to the acting direction of the load load in the virtual plane including the central axis of the stationary ring. can be adopted that is smaller than the outer width dimension of the stationary ring in the perpendicular direction.
- a stationary body may be formed by combining a stationary ring, which is a member directly forming a track, and a magnetostrictive effect material functioning as a magnetostrictive effect portion via one or more adjacent members. it can.
- a stationary ring which is a member directly forming a track
- a magnetostrictive effect material functioning as a magnetostrictive effect portion via one or more adjacent members.
- B1 A configuration in which the adjacent member is formed in an annular shape, and the adjacent member is fitted and fixed to the stationary wheel by an interference fit
- B2 A structure in which the magnetostrictive effect material is formed in an annular shape, and the magnetostrictive effect material is fitted and fixed to an adjacent member by an interference fit (the portion of the surface of the adjacent member that is fitted and fixed to the magnetostrictive effect material is attached) Composition
- B3 a configuration in which the magnetostrictive effect material is disposed inside a concave portion such as a concave groove formed on the surface of an adjacent member (a configuration in
- the outer width dimension of the magnetostrictive effect material in the direction perpendicular to the acting direction of the load load in the virtual plane including the central axis of the stationary ring. can be adopted that is smaller than the outer width dimension of the stationary ring in the perpendicular direction.
- the surface hardness of these peripheral surfaces is It is preferable that each be HV (Vickers hardness) 400 or more.
- the senor can be supported by a sensor support member attached to a stationary body (for example, any one of a stationary ring, an adjacent member, and a magnetostrictive effect material).
- a sensor support member attached to a stationary body (for example, any one of a stationary ring, an adjacent member, and a magnetostrictive effect material).
- the magnetostrictive effect part is made of magnetic steel, and at least a part of the surface of the magnetostrictive effect part (for example, the part where the detection part of the sensor opposes, or the density of the magnetic flux entering and exiting during use is in another part)
- the area ratio of carbides in the portion that is larger than 20% or less (preferably 10% or less) and the area ratio of nitrides is 3.0% or less (preferably 1.0% or less) Also good.
- the area ratio of the carbide (or nitride) can be adjusted by changing the amount of carbon (or nitrogen) in the magnetic steel by changing the amount of carbon (or nitrogen) added during ironmaking or steelmaking. It can also be adjusted by surface treatment such as carburization (or nitriding).
- the carbon concentration in at least a part of the surface of the magnetostrictive effect portion is 1.5% or less (preferably 1.3% or less), Further, the nitrogen concentration is set to 0.5% or less (preferably 0.2% or less).
- Arithmetic average roughness Ra is set within a range of Ra ⁇ 0.5 ⁇ m.
- the “at least part” that is a part that regulates the arithmetic average roughness Ra may be the same part as or a different part from the part that regulates the area ratio of carbides and nitrides described above.
- the magnetostrictive effect portion may be in contact with a mounting surface provided in a portion of the stationary body other than the magnetostrictive effect portion and out of the track.
- the magnetostrictive effect portion may be fixed as a film (fixed as a coating such as plating or sprayed coating, or bonded and fixed as a film), or may be fitted or fixed as a member. , You may just contact.
- the maximum value of ⁇ area which is the square root of the product of the major axis “a” and the minor axis “b” of the nonmetallic inclusion existing on the mounting surface may be 80 ⁇ m or less (preferably 40 ⁇ m or less).
- ⁇ area of the nonmetallic inclusion existing on the mounting surface is adjusted by the concentration of the element (oxygen, titanium, sulfur, etc.) of the nonmetallic inclusion contained in the material of the member having the mounting surface. I can do things.
- the maximum height Rz (JIS B 0601) of the mounting surface may be 12 ⁇ m or less (preferably 5 ⁇ m or less).
- the mounting surface has a hardness of HV400 or higher.
- the maximum crystal grain size on the mounting surface is restricted to 80 ⁇ m or less.
- the amount of retained austenite on the mounting surface is restricted to 45% by volume or less.
- the rotation support device of the present invention may include an outer ring, a rotating body, a plurality of rolling elements, and a sensor.
- the outer ring has an outer ring raceway on the inner peripheral surface, is supported by a housing or the like, and does not rotate during use.
- the rotating body has at least a magnetostrictive effect portion whose permeability changes according to the applied torque, and rotates at the time of use.
- each rolling element is provided so as to be freely rollable between an inner ring raceway and an outer ring raceway provided on the outer peripheral face of the rotating body or the outer peripheral face of another member rotating together with the rotating body.
- the senor is supported by a portion that does not rotate even when the housing, the outer ring, a sensor support member attached to the outer ring, or the like is used in a state where the sensor is disposed in proximity to the magnetostrictive effect unit, and passes through its own detection unit ( The output signal is changed in accordance with the magnetic flux that changes due to the magnetic permeability of the magnetostrictive effect portion.
- a rotating body can be used as a rotating shaft.
- the rotating body can be an inner ring having an inner ring raceway on the outer peripheral surface that is externally fitted and fixed to the outer peripheral surface of the rotating shaft during use.
- the rotating body can be a cylindrical sleeve that is externally fitted and fixed to the outer peripheral surface of the rotating shaft during use and does not have an inner ring raceway on the outer peripheral surface.
- a sensor support member can be attached to one end of the outer ring in the axial direction, and the sensor can be supported on a portion of the sensor support member that protrudes from the one end surface of the outer ring in the axial direction.
- the outer ring includes a support cylinder portion whose radial thickness is smaller than a portion adjacent to the other side in the axial direction on one axial side portion, and the sensor has an inner diameter side of the support cylindrical portion. In this state, it is possible to adopt a configuration embedded in a holder made of synthetic resin together with the support cylinder portion.
- the rotation support device of the present invention may include a rotating body and a sensor.
- the rotator has at least a magnetostrictive effect portion whose permeability changes according to the applied torque, and rotates during use.
- the sensor is supported by a portion that does not rotate even when used, such as an outer ring that is a stationary ring constituting a housing or a rolling bearing, in a state of being arranged close to the magnetostrictive effect unit, and passes through its own detection unit and An output signal is changed according to the magnetic flux which changes with the magnetic permeability of a magnetostriction effect part.
- the magnetostrictive effect portion is made of magnetic steel, and the number of non-metallic inclusions having a square root of 5 ⁇ m or more present in the surface area of 100 mm 2 of the magnetostrictive effect portion is 1000 or less (preferably 500). Or less).
- the number of the said nonmetallic inclusion can be adjusted with the density
- the magnetic steel constituting the magnetostrictive effect portion has an oxygen concentration of 20 ppm or less (preferably 15 ppm or less), a titanium concentration of 100 ppm or less (preferably 50 ppm or less), and a sulfur concentration of 0.05% or less (preferably 0.03). % Or less) magnetic steel.
- an outer ring and a plurality of rolling elements are provided.
- the outer ring has an outer ring raceway on the inner peripheral surface, is supported by a housing or the like, and does not rotate during use.
- Each rolling element is provided so as to be freely rollable between an inner ring raceway and an outer ring raceway provided on the outer peripheral face of the rotating body or the outer peripheral face of another member that rotates together with the rotating body.
- the arithmetic average roughness Ra at least in a portion facing the sensor in the radial direction on the surface of the magnetostrictive effect portion is within a range of Ra ⁇ 0.5 ⁇ m (preferably less than 0.3 ⁇ m).
- the rotating body can be a rotating shaft.
- the rotating body may be an inner ring having an inner ring raceway on the outer peripheral surface that is fitted and fixed to the outer peripheral surface of the rotating shaft when in use.
- the rotating body may be a cylindrical sleeve that is fitted and fixed to the outer peripheral surface of the rotating shaft during use and does not have an inner ring raceway on the outer peripheral surface.
- the sensor support member can be attached to one end portion in the axial direction of the outer ring, and the sensor can be supported on a portion of the sensor support member that protrudes from the one end surface in the axial direction of the outer ring.
- the magnetostrictive effect portion is made of magnetic steel, and the carbide area ratio is 20% or less (preferably 10%) in at least a portion of the surface of the magnetostrictive effect portion facing the sensor in the radial direction.
- the area ratio of nitride is 3.0% or less (preferably 1.0% or less).
- the area ratio of the carbide (or nitride) can be adjusted by changing the amount of carbon (or nitrogen) in the magnetic steel by changing the amount of carbon (or nitrogen) added during ironmaking or steelmaking. It can also be adjusted by surface treatment such as carburization (or nitriding).
- the carbon concentration in the surface of the magnetostrictive effect portion at least in the portion facing the sensor in the radial direction is 1.5% or less (preferably 1). 0.3% or less) and the nitrogen concentration is 0.5% or less (preferably 0.2% or less).
- the magnetostrictive effect part is in contact with the mounting surface provided on the outer peripheral surface of the portion other than the magnetostrictive effect part of the rotating body ⁇ for example, fixed as a film (fixed as a film such as plating or sprayed coating, It may be in the form of a film, adhesively fixed, etc.], may be fitted, fixed or adhesively fixed as a member, or may simply be in contact ⁇ .
- the maximum value of ⁇ area which is the square root of the product of the major axis a and the minor axis b of the non-metallic inclusion existing on the mounting surface is 80 ⁇ m or less (in other words, the maximum non-inclusion existing on the mounting surface).
- the ⁇ area of the metal inclusion is 80 ⁇ m or less (preferably 40 ⁇ m or less). Note that the ⁇ area of the nonmetallic inclusions existing on the mounting surface is adjusted by the concentration of the nonmetallic inclusion generating elements (oxygen, titanium, sulfur, etc.) contained in the material of the member having the mounting surface. Can do.
- the maximum height Rz (JIS B 0601) of the mounting surface is 12 ⁇ m or less (preferably 5 ⁇ m or less).
- an outer ring and a plurality of rolling elements are provided.
- the outer ring has an outer ring raceway on the inner peripheral surface, is supported by a housing or the like, and does not rotate during use.
- each rolling element is provided so as to be freely rollable between an inner ring raceway and an outer ring raceway provided on the outer peripheral face of the rotating body or the outer peripheral face of another member rotating together with the rotating body.
- the rolling bearing is separated from the sensor and the magnetostrictive effect portion in the axial direction. Can also be arranged.
- the senor can be supported by a sensor support member attached to the outer ring.
- a sensor support member attached to the outer ring.
- the mounting surface has a hardness of HV400 or higher.
- the maximum crystal grain size on the mounting surface is restricted to 80 ⁇ m or less.
- the amount of retained austenite on the mounting surface is restricted to 45% by volume or less.
- the rotation support device of the present invention may include a rolling bearing, a magnetostrictive member, and a sensor.
- the magnetostrictive member is a part that is concentrically combined with the stationary ring constituting the rolling bearing and has a magnetic permeability that changes in accordance with the load at a position (direction) where the load of the rolling bearing is applied in the circumferential direction.
- the portions adjacent to both sides in the circumferential direction have pillar portions that are portions where the thinned portions (for example, through holes, notches, etc.) are formed.
- the magnetostrictive member may be annular.
- the inner peripheral surface shape and outer peripheral surface shape of the magnetostrictive member viewed from the axial direction do not need to be circular, respectively.
- an elliptical shape is formed according to the shape of the peripheral surface of the mating member to which the inner peripheral surface or outer peripheral surface is fitted. It is good also as various shapes, such as a polygon.
- the sensor is disposed adjacent to the column portion in a state of being attached to the magnetostrictive member (for example, attached to the column portion or the vicinity of the column portion), and detects a change in the magnetic permeability of the column portion.
- a sensor that passes through itself and changes an output signal in accordance with a magnetic flux that changes depending on the magnetic permeability of the column portion (for example, a coil, a Hall element, a Hall IC, an MR element, a GMR element). , AMR elements, TMR elements, MI elements, etc.).
- the magnetostrictive member is an anti-orbit side circumferential surface (stationary surface) which is a circumferential surface opposite to the circumferential surface provided with the track, on both the inner and outer circumferential surfaces of the stationary ring.
- the ring is an outer ring, it is fitted and fixed to the outer peripheral surface, and when the stationary ring is an inner ring, the inner peripheral surface).
- the rolling bearing is a radial rolling bearing capable of supporting an axial load (angular ball bearing, tapered roller bearing, etc.)
- a magnetostrictive member is attached to It arrange
- an axial load applied to the rolling bearing is applied to the column portion of the magnetostrictive member sandwiched between the side surface of the stationary wheel and the side surface of the portion that does not rotate even when the housing is used in use. .
- the rolling bearing is a thrust rolling bearing
- the magnetostrictive member is directly or against the anti-orbit side surface which is the side surface opposite to the side surface on which the track is provided, on either side surface of the stationary ring. It arrange
- a thrust load applied to the rolling bearing is applied to the column portion of the magnetostrictive member sandwiched between the anti-orbit side surface of the stationary wheel and the side surface of the portion that does not rotate even when the housing is used in use.
- the senor can be a coil wound around a pillar.
- a magnetostrictive member one having a pillar portion at each of a plurality of positions in the circumferential direction in which the direction of the applied load is different is adopted, and one sensor is arranged adjacent to each pillar portion. (When the sensor is a coil wound around the column portion, the sensor coil is wound around each column portion one by one).
- a magnetostrictive member provided with magnetic circuit parts configured for each column part and independent from each other (not superposed on each other).
- a temperature compensation circuit including a bridge composed of two coils (resistors) wound around two pillars and two resistors is provided. Based on the output of the temperature compensation circuit (midpoint voltage of the bridge), it is possible to measure a load load (or a physical quantity such as a torque correlated with the load load) in which an error due to a temperature change is reduced or eliminated. .
- the rotation support device of the present invention may include a rolling bearing, a magnetostrictive material, a coil, and a magnetic path member.
- Magnetostrictive materials are combined so that a stress corresponding to the load of the rolling bearing is applied to the stationary ring constituting the rolling bearing (directly or via another member), and the magnetic permeability changes according to this stress.
- the coil is for detecting a change in the magnetic permeability of the magnetostrictive material, and is combined with the stationary wheel (directly or via another member).
- the magnetic path member is generated by passing a current through the coil together with at least the magnetostrictive material in a state of covering the magnetostrictive material and the coil with respect to the stationary wheel (directly or via another member).
- a closed magnetic circuit through which the magnetic flux flows is configured.
- the closed magnetic path means that the entire magnetic path (full length) is connected by a magnetic body (a plurality of magnetic bodies combined with each other).
- a magnetostrictive material is combined with a stationary wheel, and a strain generating member (preferably a member that generates a strain larger than that of a stationary wheel) that generates a strain according to the load of the rolling bearing is applied to this strain. Install so that the appropriate stress is applied.
- the coil is wound around the strain generating member.
- the magnetic path member is combined with the strain generating member. In this state, the magnetic path member constitutes a closed magnetic path together with at least the strain-generating member and the magnetostrictive material.
- the magnetic path member and the strain generating member are preferably made of a soft magnetic material, which is a magnetic material having small hysteresis characteristics. This is because the influence of the hysteresis characteristic can be suppressed, the linearity of the output of the measurement circuit can be improved, and highly accurate measurement can be performed.
- the rolling bearing is a radial rolling bearing
- the strain-generating member is fitted and fixed to the anti-orbit side circumferential surface (the circumferential surface opposite to the circumferential surface provided with the track) of the stationary ring.
- the radial load applied to the rolling bearing is applied to the strain-generating member sandwiched between the outer peripheral surface of the stationary wheel and the inner peripheral surface of the fixed part such as the housing in use.
- the strain generating member is distorted in accordance with the radial load.
- the rolling bearing is a radial rolling bearing capable of supporting an axial load, such as an angular ball bearing or a tapered roller bearing, for example, the strain-generating member is directly or against the side surface of the stationary ring.
- the axial load applied to the rolling bearing is applied to the strain generating member sandwiched between the side surface of the stationary wheel and the side surface of the fixed part such as the housing in use, thereby generating the strain.
- the member is distorted according to the axial load.
- the strain generating member may be directly or against a spacer on the side opposite to the raceway side (the side opposite to the side provided with the raceway). It arrange
- the thrust load applied to the rolling bearing is applied to the strain-generating member sandwiched between the anti-orbit side surface of the stationary wheel and the side surface of the fixed part such as the housing in use.
- the strain generating member is distorted according to the thrust load.
- a magnetostrictive material is installed in a concave groove formed on the surface of a stationary ring or a strain-generating member and whose width dimension elastically changes (shrinks) according to the load applied to the rolling bearing.
- the stress applied to the magnetostrictive material is changed according to the change of.
- the magnetostrictive material can be combined with the stationary ring so as to be compressed (in the direction of the load load of the rolling bearing) between the stationary ring and a fixed part such as a housing.
- the magnetostrictive material can be fixed as a film such as a plating or a sprayed coating on a portion of the surface of the stationary ring or the strain generating member that is distorted according to the load applied to the rolling bearing.
- a combination of a coil and a closed magnetic circuit can be provided at a plurality of locations in the circumferential direction of the stationary wheel.
- a temperature compensation circuit including a bridge composed of two coils (resistors) and two resistors is provided. Based on the output of the temperature compensation circuit (midpoint voltage of the bridge), it is possible to measure a load load (or a physical quantity such as a torque correlated with the load load) that reduces or eliminates an error due to a temperature change.
- the magnetostrictive effect portion of the stationary body only needs to be present at a position to which stress corresponding to the load load is applied regardless of the direction of application of the load load of the rolling bearing.
- the degree of freedom in design can be increased.
- non-metallic inclusions contained in the magnetic steel become a stress concentration source. For this reason, when the number of non-metallic inclusions increases, the inverse magnetostriction characteristics (relationship between applied stress and magnetic permeability) of the magnetostrictive effect portion become unstable, and as a result, it becomes difficult to perform highly accurate load measurement.
- typical types of non-metallic inclusions contained in the magnetic steel include oxides represented by Al 2 O 3 , titaniums represented by TiN, and sulfides represented by MnS. is there.
- the concentration of oxygen, titanium, and sulfur, which are the formation elements of non-metallic inclusions, in magnetic steel must be regulated to reduce the number of non-metallic inclusions. It becomes important. In this regard, if the number of non-metallic inclusions contained in the magnetic steel constituting the magnetostrictive effect portion and serving as a stress concentration source is reduced, the inverse magnetostrictive characteristics of the magnetostrictive effect portion can be stabilized. For this reason, highly accurate load measurement can be performed.
- the surface of the magnetostrictive effect portion has a rough concavo-convex shape, stress tends to concentrate on the portion corresponding to the concavo-convex concave portion, and the inverse magnetostrictive characteristic of the magnetostrictive effect portion becomes unstable accordingly.
- the surface roughness of at least a part of the surface of the magnetostrictive effect portion is good (contains in the range of Ra ⁇ 0.5 ⁇ m), the inverse magnetostriction characteristic of the magnetostrictive effect portion is stabilized, and more Highly accurate load measurement can be performed.
- the magnetostrictive effect portion When the magnetostrictive effect portion is made of magnetic steel, precipitates in the magnetic steel become a stress concentration source. For this reason, when the number of precipitates increases, the inverse magnetostriction characteristics (relationship between applied stress and permeability) of the magnetostrictive effect portion become unstable, and as a result, it becomes difficult to perform highly accurate load measurement.
- the types of precipitates contained in the magnetic steel include carbides and nitrides. Carbon and nitrogen, which are these generated elements, are additive elements that improve the strength of steel members. However, if the amount increases excessively, the number of carbides and nitrides increases, and as described above, highly accurate load measurement is performed. Cannot be performed.
- the surface of the magnetostrictive effect portion exists in at least a part (for example, a part where the detection part of the sensor opposes, or a part where the density of magnetic flux entering and exiting during use is larger than other parts). If the number of precipitates (carbides and nitrides) that become a stress concentration source is reduced, the inverse magnetostriction characteristics of the magnetostrictive effect portion can be stabilized. For this reason, highly accurate load measurement can be performed.
- the surface of the magnetostrictive effect portion has a rough concavo-convex shape
- stress tends to concentrate on the portion corresponding to the concave portion of the concavo-convex shape, and the inverse magnetostrictive characteristic of the magnetostrictive effect portion becomes unstable accordingly.
- the surface roughness of at least a part of the surface of the magnetostrictive effect part (for example, the part where the detection part of the sensor faces or the part where the density of the magnetic flux entering and exiting during use is larger than the other part). If the thickness is good (contains in the range of Ra ⁇ 0.5 ⁇ m), the inverse magnetostriction characteristic of the magnetostrictive effect portion is stabilized, and more accurate load measurement can be performed.
- the mounting surface is locally localized. It is possible to suppress the occurrence of plastic deformation and to suppress the generation of local permanent strain in the magnetostrictive effect portion that is in contact with the mounting surface. Therefore, highly accurate load measurement can be performed.
- the rolling bearing When the bearing that rotatably supports the rotating shaft with respect to a portion that does not rotate even when a housing or the like is used is a rolling bearing that includes an outer ring and a plurality of rolling elements, the rolling bearing is a sliding bearing. Friction loss is small compared to Therefore, it is possible to measure the torque while improving the torque transmission efficiency by the rotating shaft.
- the sensor is supported by a portion of the sensor support member attached to one end portion in the axial direction of the outer ring that protrudes to one side in the axial direction from the one end surface in the axial direction of the outer ring. For this reason, a sensor can be handled integrally with the rolling bearing comprised including an outer ring
- the axial dimension of the outer ring can be reduced as compared with the structure in which the sensor is supported on the inner peripheral surface of the outer ring.
- the sensor is disposed in a synthetic resin holder together with the support cylinder portion in a state where the sensor is disposed on the inner diameter side of the support cylinder portion. In an embedded manner). For this reason, a sensor can be handled integrally with the rolling bearing comprised including an outer ring
- the support cylinder part which supports a sensor is a part of outer ring
- the support cylinder portion has a smaller thickness in the radial direction than a portion adjacent to the other side in the axial direction, an increase in the weight of the outer ring due to the provision of the support cylinder portion can be suppressed.
- the sensor is embedded in the holder, it is possible to prevent foreign matter such as magnetic powder from deteriorating torque measurement accuracy from adhering to the sensor.
- the inverse magnetostriction characteristics of the magnetostrictive effect portion can be stabilized. For this reason, highly accurate torque measurement can be performed. Further, if the surface of the magnetostrictive effect portion has a rough concavo-convex shape, stress tends to concentrate on the portion corresponding to the concave portion of the concavo-convex shape, and the inverse magnetostrictive characteristic of the magnetostrictive effect portion becomes unstable accordingly. .
- the magnetostrictive effect portion at least in the portion facing the sensor in the radial direction is good (contains in the range of Ra ⁇ 0.5 ⁇ m)
- the magnetostrictive effect is achieved.
- the inverse magnetostriction characteristic of the part is stabilized, and more accurate torque measurement can be performed.
- the load load of the rolling bearing (or a physical quantity such as torque having a correlation with the load load) can be measured.
- the load is applied to the pillar portion, which is a portion where the portions adjacent to both sides in the circumferential direction of the magnetostrictive member are the thinned portions, the stress acting on the pillar portion can be increased. Therefore, the load load (or a physical quantity such as torque having a correlation with the load load) can be measured with high sensitivity.
- the magnetostrictive member does not need to be bonded to the stationary ring constituting the rolling bearing, and the column portion only needs to be arranged at a position (direction) where the load load of the rolling bearing is applied in the circumferential direction. Therefore, a normal measurement function can be maintained for a long time even when used in oil, at a high temperature and in a vibration environment.
- the sensor since the sensor is attached to the magnetostrictive member and the magnetostrictive member and the sensor can be handled as a unit, it is possible to facilitate parts management and assembly work.
- load loads in different directions can be measured. Furthermore, the fact that the magnetic flux flowing through each column (the magnetic flux used to detect the magnetic permeability of each column by each sensor) has an effect on the magnetic flux flowing through the other columns. Can be prevented. For this reason, the reliability of measurement of load loads in different directions (or physical quantities such as torque having a correlation with the load loads) can be improved.
- a rotation support device including a rolling bearing, a magnetostrictive material, a coil, and a magnetic path member
- the inductance of the coil changes.
- a load load or a physical quantity such as torque having a correlation with the load load
- the magnetostrictive material does not need to be bonded to the stationary ring constituting the rolling bearing, and may be installed so as to apply stress according to the load load of the rolling bearing. Even when used in a vibration environment, normal measurement functions can be maintained over a long period of time.
- the magnetic flux generated by passing an electric current through the coil flows in a closed magnetic path including at least a magnetostrictive material and a magnetic path member. For this reason, the value of the magnetic flux can be increased, and a highly reliable measurement can be performed accordingly. In addition, since magnetic flux leakage to the surrounding space can be made small or zero, adverse effects on peripheral devices and the like can be suppressed or prevented.
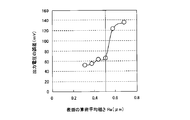
- Sectional drawing which shows the 14th example of embodiment. The diagram which shows the result of the experiment 1.
- FIG. The diagram which shows the result of the experiment 7. FIG. Sectional drawing which shows the 15th example of embodiment.
- Sectional drawing which shows the 16th example of embodiment. Sectional drawing which shows the 17th example of embodiment.
- the A section enlarged view of FIG. FIG. 9 is a diagram showing the results of Experiment 8.
- FIG. FIG. 11 is a diagram showing the results of Experiment 10.
- FIG. 11 is a diagram showing the results of Experiment 11.
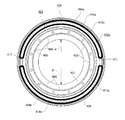
- FIG. 60 is a BB sectional view of FIG. 59.
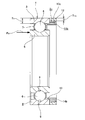
- the rotation support device of this example includes a rolling bearing 1 and a sensor 2.
- the rolling bearing 1 is a radial deep groove ball bearing.
- the rolling bearing 1 includes a stationary body 4 that does not rotate even when used, an inner ring 5 that is a rotating wheel that rotates when used, a plurality of balls 6 and 6 each of which is a rolling element, and a cage 7.
- the stationary body 4 includes an outer ring 3 that is a stationary wheel that does not rotate during use, and is configured in an annular shape.
- Each ball 6, 6 is held by a cage 7, and a deep groove type outer ring raceway 8 directly formed on the inner peripheral surface of the outer ring 3 and a deep groove type inner ring formed directly on the outer peripheral surface of the inner ring 5. It is provided between the track 9 so as to freely roll.
- Each ball 6, 6 rolls on the outer ring raceway 8 and the inner ring raceway 9 as the inner ring 5 rotates with respect to the outer ring 3.
- the members constituting such a rolling bearing 1 at least the outer ring 3, the inner ring 5, and the balls 6 and 6 are bearing steels such as SUJ2 and SUJ3, SCr420, SCM420 and the like as defined in JIS. Carburized steel, carbon steel such as S53C, and tool steel such as SK5.
- the stationary body 4 is formed by combining the outer ring 3 and a magnetostrictive effect material 10 that is a magnetostrictive effect portion.
- the magnetostrictive effect material 10 is made of a magnetic metal in a cylindrical shape, and is fixed to the outer peripheral surface of the outer ring 3 by an interference fit. For this reason, the inner peripheral surface of the magnetostrictive effect material 10 is in contact with the outer peripheral surface of the outer ring 3 over the entire periphery. Since the magnetostrictive effect material 10 is made of a magnetic metal, when stress is applied, the magnetic permeability changes due to the inverse magnetostrictive effect.
- a magnetic metal constituting the magnetostrictive effect material 10 for example, bearing steels such as SUJ2 and SUJ3, carburized steels such as SCr420 and SCM420, S53C, etc. defined in JIS (Japanese Industrial Standard) Among various steels such as carbon steel and tool steel such as SK5, those having an oxygen concentration of 20 ppm or less, a titanium concentration of 100 ppm or less, and a sulfur concentration of 0.05% or less are used. That is, as the magnetic metal constituting the magnetostrictive effect material 10, magnetic steel that sufficiently suppresses the concentrations of oxygen, titanium, and sulfur, which are generation elements of nonmetallic inclusions, is used.
- the number of non-metallic inclusions having a square root of 5 ⁇ m or more existing in the surface area of 100 mm 2 of the magnetostrictive effect material 10 is 1000 or less.
- the surface hardness of the peripheral surface is HV400 or more. For this reason, heat treatment such as induction hardening for improving the hardness is performed on each of these peripheral surfaces as necessary. Also, as shown in FIG.
- the arithmetic average roughness Ra (JIS B 0601) of at least one axial side surface (the right side surface in FIG. 1) facing the sensor 2 in the surface of the magnetostrictive effect material 10 is Ra ⁇ 0.5 ⁇ m by polishing or the like. It is in the range.
- the surface roughness of the entire one side surface in the axial direction of the magnetostrictive effect material 10 can be restricted to the above range, the surface roughness of only the portion facing the sensor 2 in the one side surface in the axial direction is within the above range. It can also be regulated.
- the senor 2 has an outer ring in a state of being close to the magnetostrictive effect material 10 by facing (contacting) the detection portion with one circumferential direction on one axial side surface of the magnetostrictive effect material 10. 3 is supported by a sensor support member 11 attached to 3.
- a magnetic detection element 12 such as a Hall element, Hall IC, MR element, GMR element, AMR element, TMR element, or MI element is used.
- the sensor support member 11 has a cylindrical fitting tube portion 13 that is fitted and fixed to one end portion in the axial direction of the outer ring 3 by an interference fit, and extends radially outward from one end portion in the axial direction of the fitting tube portion 13. And an annular support 14 provided in a state of being.
- the sensor 2 is supported by the support portion 14.
- the rotation support device of the present example having the above-described configuration is configured such that the inner ring 5 has a rotation shaft (rotation shaft constituting a transmission, a rotation shaft constituting a differential gear, a propeller shaft, a drive shaft constituting a power train of an automobile). Etc.) and the stationary body 4 is used in a state of being fitted inside the housing. Then, based on the change in the magnetic permeability of the magnetostrictive effect material 10 detected by the sensor 2 during driving of the automobile, the load load of the rolling bearing 1 and the transmission torque of the rotary shaft equivalent to this load load are measured.
- the radial bearing Fr is applied to the rolling bearing 1 by a gear reaction force, for example. Since the gear reaction force changes according to the transmission torque of the rotating shaft, the radial load Fr also changes according to the transmission torque. Further, the magnetostrictive effect material 10 is disposed at a position sandwiched between the outer ring 3 and the housing with respect to the radial direction that is the direction in which the radial load Fr acts. For this reason, a stress corresponding to the radial load Fr is applied to the magnetostrictive effect material 10, and the magnetic permeability of the magnetostrictive effect material 10 changes due to this stress.
- the greater the radial load Fr the higher the magnetic permeability in the axial direction of the magnetostrictive effect material 10.
- the output signal of the sensor 2 changes according to the magnetic permeability of the magnetostrictive effect material 10. This is because when the magnetic permeability of the magnetostrictive effect material 10 changes, the magnitude of the magnetic flux passing through the magnetic detection element 12 that is the detection unit of the sensor 2 changes. Therefore, if the relationship between the output signal of the sensor 2 and the radial load Fr and the relationship between the radial load Fr and the transmission torque (or the relationship between the output signal of the sensor 2 and the transmission torque) are examined in advance, Using the relationship, the radial load Fr and the transmission torque can be obtained from the output signal of the sensor 2. In addition, the calculation which calculates
- the magnetostrictive effect material 10 is fitted and fixed to the outer peripheral surface of the outer ring 3 by an interference fit, the inside of the housing constituting the transmission or the like is in oil. Even when used under a high temperature and vibration environment, the magnetostrictive effect material 10 can be prevented from falling off from the outer peripheral surface of the outer ring 3 which is the installation location. Therefore, a highly reliable load (torque) measurement can be performed over a long period of time.
- magnetic steel such as SUJ2 having an oxygen concentration of 20 ppm or less, a titanium concentration of 100 ppm or less, and a sulfur concentration of 0.05% or less is used. Yes. Further, along with this, present in an area 100mm 2 in surface of the magnetostrictive effect material 10, non-metallic inclusions the number square root over 5 ⁇ m in area, falls within the 1000 or less. For this reason, according to the rotation support device of the present example, the number of non-metallic inclusions contained in the magnetic steel constituting the magnetostrictive effect material 10 and serving as a stress concentration source is reduced, and the inverse magnetostrictive characteristics of the magnetostrictive effect material 10 are reduced.
- At least one axial side surface of the magnetostrictive effect material 10 (the magnetic pole surface in which the density of magnetic flux entering and exiting is larger than that of the other part and the detection part of the sensor 2 is Since the surface roughness of the facing surface is good (contains in the range of Ra ⁇ 0.5 ⁇ m), the inverse magnetostriction characteristics of the magnetostrictive effect material 10 can be further stabilized. As a result, in the case of this example, highly accurate load measurement (load load measurement, torque measurement) can be performed.
- the magnetic metal constituting the magnetostrictive effect material 10 has a larger magnetostriction constant than the magnetic steel constituting the outer ring 3 (for example, pure Ni, Fe—Ni alloy, Fe—Co alloy, Fe—Al alloy, non-magnetic alloy).
- a material such as a crystalline alloy that can easily exhibit the inverse magnetostriction effect may be used.
- Magnetic steel may be used as the magnetic metal constituting the magnetostrictive effect material 10. Then, one of the surfaces of the magnetostrictive effect material 10 that is at least the surface facing the sensor 2 and the magnetic pole surface (the portion where the density of the entering and exiting magnetic flux is larger than the other portions) is one side surface (in FIG. 1). In the right side surface), the carbide area ratio is 20% or less and the nitride area ratio is 3.0% or less.
- the magnetic metal constituting the magnetostrictive effect material 10 for example, bearing steels such as SUJ2 and SUJ3, carburized steels such as SCr420 and SCM420, carbon steels such as S53C, tools such as SK5, etc., stipulated in JIS Among various magnetic steels called steels, carbon and nitrogen concentrations, which are precipitates of carbides and nitrides, are not more than a predetermined value (the amount of carbon and nitrogen added is predetermined during ironmaking or ironmaking) Use the value regulated below the value.
- the magnetostriction effect material is obtained by setting the carbon concentration to 1.5% or less and the nitrogen concentration to 0.5% or less on one side surface (including the entire surface) of the magnetostriction effect material 10.
- the area ratio of carbide is 10% or less and the area ratio of nitride is 10% or less on one axial side surface (including all surfaces).
- magnetic steel is used as the magnetic metal constituting the magnetostrictive effect material 10, and at least one axial side surface (including the entire surface) of the surface of the magnetostrictive effect material 10 is used.
- the area ratio of carbide is 20% or less, and the area ratio of nitride is 3.0% or less. That is, the number of precipitates (carbides and nitrides) that are at least concentrated on one side surface (including the entire surface) of the magnetostrictive effect material 10 and that serve as a stress concentration source is sufficiently reduced. For this reason, the inverse magnetostriction characteristic of the magnetostrictive effect material 10 can be stabilized.
- the surface roughness of at least one axial side surface of the surface of the magnetostrictive effect material 10 is good (contains within the range of Ra ⁇ 0.5 ⁇ m).
- the inverse magnetostriction characteristic of the effect material 10 can be further stabilized.
- highly accurate load measurement load load measurement, torque measurement
- ⁇ area which is the square root of the product of the major axis a and the minor axis b of the non-metallic inclusions present on the outer circumferential surface of the outer ring 3, which is the mounting surface of the magnetostrictive effect material 10, is present on the outer circumferential surface of the outer ring 3.
- ⁇ area which is the dimension of the largest nonmetallic inclusion is regulated to 80 ⁇ m or less.
- concentration of the nonmetallic inclusion product elements oxygen, titanium, sulfur, etc.
- the maximum height Rz of the outer peripheral surface of the outer ring 3 is restricted to 12 ⁇ m or less by polishing or the like. Further, with respect to the outer ring 3, by selecting appropriate heat treatment conditions according to the material, the hardness of the outer peripheral surface of the outer ring 3 is set to HV400 or more, the maximum crystal grain size is set to 80 ⁇ m or less, and the residual austenite amount is 45% by volume. It is as follows.
- the maximum value of ⁇ area of non-metallic inclusions existing on the outer peripheral surface of the outer ring 3 is regulated to 80 ⁇ m or less, and the maximum height Rz of the outer peripheral surface of the outer ring 3 is set to It is regulated to 12 ⁇ m or less.
- wheel 3 can be decreased, and it can suppress that a local plastic deformation arises in the outer peripheral surface of the outer ring
- the hardness of the outer peripheral surface of the outer ring 3 is restricted to HV400 or more, and the maximum crystal grain size on the outer peripheral surface of the outer ring 3 is restricted to 80 ⁇ m or less. For this reason, it is possible to further suppress the occurrence of local plastic deformation on the outer peripheral surface of the outer ring 3. Further, if the amount of retained austenite on the outer peripheral surface of the outer ring 3 is large, a dimensional change is likely to occur on the outer peripheral surface of the outer ring 3 at a high temperature. In this regard, in the present modification, the amount of retained austenite on the outer peripheral surface of the outer ring 3 is restricted to 45% by volume or less.
- the outer width W 10a of the magnetostrictive effect material 10a is smaller (W 10a ⁇ W 3) than the outer width W 3 of the outer ring 3.
- the magnetostrictive effect material 10a is disposed at the axially central portion of the outer peripheral surface of the outer ring 3, which is a position overlapping the outer ring raceway 8 in the radial direction. Accordingly, the sensor 2 facing (contacting) one circumferential direction location on one axial side surface of the magnetostrictive effect material 10a is disposed on the outer diameter side of one axial end portion of the outer ring 3. Therefore, a part of the support portion 14a of the sensor support member 11a, which is a portion that supports the sensor 2, is also arranged on the outer diameter side of one end portion in the axial direction of the outer ring 3.
- the outer width W 10a of the magnetostrictive material 10a smaller than the outer width W 3 of the outer ring 3 (the W 10a ⁇ W 3) the amount, Compared with the case of the first example of the embodiment described above, the stress applied to the magnetostrictive effect material 10a is increased. For this reason, it is possible to improve the measurement sensitivity of the radial load Fr applied to the rolling bearing 1 and the transmission torque of the rotating shaft fitted around the inner ring 5 constituting the rolling bearing 1.
- Other configurations and operational effects are the same as those of the first example of the embodiment described above.
- FIG. 1 A third example of the embodiment of the present invention will be described with reference to FIG.
- the configuration of the sensor 2a is different from that of the first example of the embodiment shown in FIG. That is, in this example, the coil 15 is used as the detection unit of the sensor 2a.
- the coil 15 is arranged concentrically with the magnetostrictive effect material 10 so as to face the entire circumference of one side surface in the axial direction of the magnetostrictive effect material 10.
- an AC voltage is applied to the coil 15 to generate an AC magnetic field around the coil 15.
- the magnetostrictive effect material 10 is not magnetized.
- the arithmetic average roughness Ra of the entire surface of the magnetostrictive effect material 10 is restricted to a range of Ra ⁇ 0.5 ⁇ m.
- the output signal of the sensor 2a changes according to the magnetic permeability of the magnetostrictive effect material 10. This is because when the magnetic permeability of the magnetostrictive effect material 10 changes, the magnetic flux passing through the inside of the coil 15 which is the detection part of the sensor 2a changes, and the inductance (impedance) of the coil 15 changes accordingly. It is. Therefore, also in the case of this example, as in the case of the first example of the above-described embodiment, the radial load Fr loaded on the rolling bearing 1 and the inner ring constituting the rolling bearing 1 from the output signal of the sensor 2a. 5 is obtained.
- the inductance of the coil 15 changes according to the radial load Fr regardless of the circumferential position where the radial load Fr is applied. For this reason, it can be suitably used for an application in which the circumferential position to which the radial load Fr is applied changes according to the operating situation. Further, in the case of the structure of this example, the manufacturing cost can be reduced because the magnetizing process of the magnetostrictive effect material 10 can be omitted at the time of manufacturing. Other configurations and operational effects are the same as those of the first example of the embodiment described above.
- the area ratio of carbide on the entire surface of the magnetostrictive effect material 10 may be 20% or less, and the area ratio of nitride may be 3.0% or less. Therefore, the carbon concentration on the entire surface of the magnetostrictive effect material 10 is 1.5% or less, and the nitrogen concentration is 0.5% or less.
- the magnetostrictive effect material 10b is placed on the inner diameter side of the coil 15a, which is the detection portion of the sensor 2b, in the concave groove 16 formed over the entire circumference in the axial central portion of the outer peripheral surface of the outer ring 3a. It is installed.
- the magnetostrictive effect material 10b is formed by combining a pair of magnetostrictive elements 17 and 17 that are each formed in a semi-cylindrical shape with a magnetic metal into a cylindrical shape within the concave groove 16 and surrounding the pair of magnetostrictive elements 17 and 17 together.
- the direction end portions are joined by welding or the like.
- the inner peripheral surface of the magnetostrictive effect material 10 b is in close contact with the bottom surface of the groove 16 over the entire periphery.
- the outer ring 3a is used while being directly fitted in the housing.
- the magnetostrictive effect material 10b is elastically deformed together with the outer ring 3a, so that a stress corresponding to the radial load Fr is applied to the magnetostrictive effect material 10b.
- the radial load Fr and the inner ring 5 constituting the rolling bearing 1 are removed based on the detection of the change in the magnetic permeability of the magnetostrictive effect material 10b caused by the change of the stress by the sensor 2b.
- the transmission torque of the fitted rotating shaft is measured.
- the dimension of the sensor 2b is regulated so that the outer peripheral surface of the sensor 2b is disposed radially inward from the outer peripheral surface of the outer ring 3a.
- the bottom surface of the groove 16 is the mounting surface of the magnetostrictive effect material 10b.
- the properties of the mounting surface are the third modification of the first example of the embodiment described above. You may regulate in the same way as in the example.
- FIG. 7 A sixth example of the embodiment of the present invention will be described with reference to FIG.
- the cylindrical magnetostrictive effect material 10c is applied to the axial one side surface (right side in FIG. 7) of the outer ring 3 with respect to the acting direction (the left-right direction in FIG. 7) of the axial load Fa applied to the rolling bearing 1. Surface) and a stepped surface provided on the inner peripheral surface of the housing (not shown).
- the outer width dimension T 10c of 10c is smaller (T 10c ⁇ T 3) than the same outer width dimension T 3 of the outer ring 3.
- the magnetostrictive effect material 10c is magnetized in the radial direction.
- the magnetic detection element 12 which is a detection portion of the sensor 2c supported by the sensor support member 11b attached to one end portion of the outer ring 3 in the axial direction is opposed to one place in the circumferential direction of the inner peripheral surface of the magnetostrictive effect material 10c. It is arranged at a position where it abuts.
- the arithmetic average roughness Ra of at least the inner peripheral surface of the surface of the magnetostrictive effect material 10c is in the range of Ra ⁇ 0.5 ⁇ m.
- axial stress corresponding to the axial load Fa is applied to the magnetostrictive effect material 10c. Therefore, in the case of this example, the axial load Fa is measured based on the detection of the change in the magnetic permeability of the magnetostrictive effect material 10c caused by the change in the stress by the sensor 2c. Yes.
- At least the surface area facing the sensor 2c and the inner peripheral surface (including the entire surface) that is the magnetic pole surface has a carbide area ratio of 20% or less, and nitride.
- the area ratio may be 3.0% or less.
- the carbon concentration is 1.5% or less and the nitrogen concentration is 0.5% or less on at least the inner peripheral surface (including the entire surface) of the surface of the magnetostrictive effect material 10c.
- the one side surface in the axial direction of the outer ring 3 that is in contact with the magnetostrictive effect material 10c is the mounting surface of the magnetostrictive effect material 10c.
- the properties of the mounting surface are the third modification of the first example of the embodiment described above. You may regulate in the same way as in the example.
- the magnetostrictive effect material 10d is fixed as a coating (for example, a sprayed coating) on the entire circumference of the outer peripheral surface of the outer ring 3b, which is the mounting surface of the magnetostrictive effect material 10d. Further, the magnetostrictive effect material 10d is magnetized in the axial direction. Further, the sensor 2 is arranged at a position facing one circumferential direction on one axial side surface of the outer ring 3b. Further, the arithmetic average roughness Ra of the outer peripheral surface of the magnetostrictive effect material 10d is restricted to a range of Ra ⁇ 0.5 ⁇ m.
- the process of smoothing the outer peripheral surface of the outer ring 3b serving as the substrate surface, and in the stage after forming the coating film of the magnetostrictive effect material 10d is performed.
- the magnetostrictive effect material 10d may be fixed as a coating on one side surface of the outer ring 3b in the axial direction instead of the outer peripheral surface of the outer ring 3b.
- Other configurations and operational effects are the same as those of the first example of the embodiment shown in FIG.
- the magnetostrictive effect material 10d is fixed as a film (for example, fixed as a coating film such as plating, or adhesively fixed in the form of a film) on the entire outer periphery of the outer ring 3b, and the magnetostrictive effect material 10d is attached in the axial direction. It may be magnetized.
- the magnetostrictive effect material 10d is plated, nickel plating can be preferably used.
- the outer ring 3b to be the mating member is made of iron (for example, bearing steel) having a carbon concentration of 0.1% or more, or aluminum alloy if there is no problem in strength.
- a film in which nickel is formed can be suitably used.
- the area ratio of carbide on the outer peripheral surface of the magnetostrictive effect material 10d may be 20% or less, and the area ratio of nitride may be 3.0% or less. Therefore, the carbon concentration on the outer peripheral surface of the magnetostrictive effect material 10d is 1.5% or less, and the nitrogen concentration is 0.5% or less.
- the outer peripheral surface of the adjacent member 18 is the mounting surface of the magnetostrictive effect material 10d.
- the property of the mounting surface is the third modification of the first example of the above-described embodiment. You may regulate in the same way.
- the stationary body 4a is formed by combining the outer ring 3, the adjacent member 18, and the magnetostrictive effect material 10d.
- the adjacent member 18 is made of a magnetic steel such as bearing steel or an aluminum alloy in a cylindrical shape, and is fitted and fixed to the outer peripheral surface of the outer ring 3 by an interference fit. Further, the magnetostrictive effect material 10 d is fixed as a coating on the outer peripheral surface of the adjacent member 18. The magnetostrictive effect material 10d is magnetized in the axial direction.
- This magnetization is performed at a stage after the magnetostrictive effect material 10 d is fixed to the outer peripheral surface of the adjacent member 18 and before the adjacent member 18 is externally fixed to the outer peripheral surface of the outer ring 3.
- the magnetostrictive effect material 10 d can be fixed as a coating on one axial side surface of the adjacent member 18 instead of the outer peripheral surface of the adjacent member 18.
- one axial side surface of the adjacent member 18a is a mounting surface of the magnetostrictive effect material 10e.
- the properties of the mounting surface are the third example of the first example of the embodiment described above. You may restrict
- the stationary body 4a is formed by combining the outer ring 3, the adjacent member 18a, and the magnetostrictive effect material 10e.
- the adjacent member 18a is made cylindrical by magnetic steel such as bearing steel.
- the magnetostrictive effect material 10e is fixed as a coating on one axial side surface (right side surface in FIG. 10) of the adjacent member 18a.
- the adjacent member 18a is magnetized in the radial direction or the axial direction. Further, the arithmetic average roughness Ra of one side surface in the axial direction of the magnetostrictive effect material 10e is restricted to a range of Ra ⁇ 0.5 ⁇ m.
- the adjacent member 18a to which such a magnetostrictive effect material 10e is fixed is applied to the outer ring 3 with respect to the acting direction of the axial load Fa applied to the rolling bearing 1 (the acting direction in FIG. 10).
- a configuration is adopted in which it is arranged at a position sandwiched between one axial side surface (the right side surface in FIG. 10) and a step surface provided on the inner peripheral surface of the housing (not shown).
- the magnetic detection element 12 which is a detection portion of the sensor 2c supported by the sensor support member 11b attached to one end portion in the axial direction of the outer ring 3 is disposed at a position adjacent to the inner diameter side of the adjacent member 18a.
- the magnetostrictive effect material 10e can be fixed as a coating on the inner peripheral surface of the adjacent member 18a instead of the one axial side surface of the adjacent member 18a.
- Other configurations and operational effects are the same as those of the sixth example of the embodiment shown in FIG.
- the area ratio of carbide on one side surface in the axial direction of the magnetostrictive effect material 10e may be 20% or less, and the area ratio of nitride may be 3.0% or less.
- the carbon concentration on one axial side surface of the magnetostrictive effect material 10e is set to 1.5% or less, and the nitrogen concentration is set to 0.5% or less.
- the stationary body 4b consists only of the outer ring 3b.
- wheel 3b is functioned as a magnetostriction effect part. Therefore, in the case of this example, the outer ring 3b is made of the same magnetic steel as the magnetostrictive effect material 10 of the first example of the embodiment shown in FIG. Further, the outer ring 3b is magnetized in the axial direction so that a magnetic field is generated inside and outside the outer ring 3b.
- the magnetic detection element 12 which is the detection portion of the sensor 2 supported by the sensor support member 11 attached to one end portion of the outer ring 3b in the axial direction is connected to the circumferential direction of one side surface of the outer ring 3b which is the magnetic pole surface. It is made to face one place.
- the arithmetic average roughness Ra of at least one axial side surface of the surface of the outer ring 3b is restricted to a range of Ra ⁇ 0.5 ⁇ m. Then, based on the change in the magnetic permeability of the outer ring 3b detected by the sensor 2, the radial load Fr applied to the rolling bearing 1 and the transmission torque of the rotating shaft fitted on the inner ring 5 constituting the rolling bearing 1 are fitted. Is measured.
- the carbon concentration may be 1.5% or less and the nitrogen concentration may be 0.5% or less on at least one side surface (including the entire surface) of the outer ring 3b.
- the carbide area ratio is 20% or less and the nitride area ratio is 3.0% on at least one axial side surface (including the entire surface) of the outer ring 3b. It is as follows.
- the outer width dimension W o in the axial direction of the outer diameter side half is smaller than the outer width dimension W i in the axial direction of the inner diameter side half (W o ⁇ W i And).
- the sensor 2 is made to oppose one place of the circumferential direction of the axial direction one side surface of the narrow part 19 which is an outer diameter side half part of the outer ring
- the arithmetic average roughness Ra of at least one side surface of the narrow portion 19 in the surface of the outer ring 3c is restricted to a range of Ra ⁇ 0.5 ⁇ m.
- the carbide area ratio is 20% or less and the nitride area ratio is 3.0% or less on at least one side surface (including the entire surface) of the narrow portion 19 in the axial direction. It is also good.
- the carbon concentration in the surface of the outer ring 3c at least on one side surface in the axial direction of the narrow portion 19 (the entire surface including the one side surface in the axial direction) is 1.5% or less, and the nitrogen concentration is 0.5% or less.
- the outer ring 3c is not magnetized, and an AC magnetic field is generated around the coil 15b by applying an AC voltage to the coil 15b in use. Then, based on detecting a change in the magnetic permeability of the outer ring 3c as a change in the inductance of the coil 15b, the radial load Fr loaded on the rolling bearing 1 is measured.
- Other configurations and operational effects are the same as those of the eleventh example of the embodiment described above.
- this invention can be implemented combining the structure of each embodiment mentioned above suitably.
- the configuration related to the detection unit of the sensor including the presence or absence of magnetization of the magnetostriction effect unit
- the configuration related to the detection unit of the sensor can be replaced with the configuration of another embodiment.
- FIG. 13 A thirteenth example of the embodiment of the present invention will be described with reference to FIG.
- the shape of the outer ring 3c and the attachment position of the magnetostrictive effect material 10f are different from the case of the seventh example of the embodiment shown in FIG.
- the outer width dimension W o in the axial direction of the outer diameter side half is smaller than the outer width dimension W i in the axial direction of the inner diameter side half (W o ⁇ W i ).
- the magnetostrictive effect material 10f is fixed as a film similar to the case of the seventh example of the embodiment on one side surface in the axial direction of the narrow portion 19 which is the outer diameter side half of the outer ring 3c.
- Is magnetized in the axial direction That is, one side surface in the axial direction of the narrow portion 19 becomes a mounting surface of the magnetostrictive effect material 10f. And the sensor 2 is made to oppose one place of the circumferential direction of the axial direction one side surface of the magnetostrictive effect material 10f.
- the partial of reduced outer width W o of the outer diameter side half of the outer ring 3c, the greater the stress applied to the narrow portion 19 is an outer diameter side half portion, narrow
- the amount of elastic deformation of the portion 19 increases.
- the amount of elastic deformation of the magnetostrictive effect material 10f fixed to one axial side surface of the narrow portion 19 is also increased. Accordingly, it is possible to improve the measurement sensitivity of the radial load Fr loaded on the rolling bearing 1 and the transmission torque of the rotating shaft fitted on the inner ring 5 constituting the rolling bearing 1.
- Other configurations and operational effects are the same as those of the seventh example of the embodiment described above.
- the radial load Fr loaded on the rolling bearing 1 is measured.
- Other configurations and operational effects are the same as in the case of the fourteenth example of the embodiment described above.
- the rotation support device of this example includes a rolling bearing 101, a rotation shaft 102, a sensor support member 103, and a sensor 104.
- the rolling bearing 101 is a shell needle bearing and includes an outer ring 105, a plurality of needles 106 and 106 each of which is a rolling element, and a cage 107.
- the outer ring 105 is formed in a cylindrical shape by subjecting a steel plate material to plastic processing such as drawing.
- the outer ring 105 includes inward flange portions 108 and 108 at both axial end portions.
- a portion sandwiched between the two inwardly facing flange portions 108, 108 is a cylindrical outer ring raceway 109.
- Such an outer ring 105 is fitted in a housing or the like constituting a power train of an automobile and does not rotate during use.
- Each of the needles 106 and 106 is provided between an outer ring raceway 109 and a cylindrical inner ring raceway 110 provided on the outer peripheral surface of the rotating shaft 102 so as to be able to roll while being held by a cage 107. Yes.
- Each needle 106, 106 is made of steel.
- the cage 107 is made of steel or synthetic resin.
- the rotation shaft 102 is a torque transmission shaft such as a transmission rotation shaft, a differential gear rotation shaft, a propeller shaft, and a drive shaft that constitutes a power train of an automobile, and is disposed on the inner diameter side of the rolling bearing 101. .
- An inner ring raceway 110 is provided on a portion of the outer peripheral surface of the rotating shaft 102 that faces the outer ring raceway 109 in the radial direction.
- the rotating shaft 102 corresponds to a rotating body, and the entire rotating shaft 102 (at least the outer peripheral surface) functions as a magnetostrictive effect portion.
- Such a rotating shaft 102 has a sufficiently large magnetostriction constant as compared with steel (machine structural steel, bearing steel, etc.) generally used as a material for the outer ring 105 and the needle 106 constituting the rolling bearing 101. It is made of a magnetostrictive material that is a metal (for example, pure Ni, Fe—Ni alloy, Fe—Co alloy, Fe—Al alloy, amorphous alloy, etc.).
- the rotating shaft 102 is magnetized (magnetized) in the circumferential direction.
- the sensor support member 103 is made of a metal such as steel or a synthetic resin in an annular shape, and is attached to one end of the outer ring 105 in the axial direction (the right end of FIG. 23).
- a sensor support member 103 is connected to a fitting cylinder portion 111 that is fitted and fixed to one end portion (inward flange portion 108) in the axial direction of the outer ring 105 by an interference fit, and to one end portion in the axial direction of the fitting cylinder portion 111.
- an annular support portion 112 that protrudes to one axial side from the one axial end surface of the outer ring 105.
- the senor 104 is disposed on the inner peripheral surface of the support portion 112 constituting the sensor support member 103 in a state in which the detection portion is arranged close to the outer peripheral surface of the rotation shaft 102 so as to be close to the rotation shaft 102.
- a magnetic detection element 114 such as a Hall element, Hall IC, MR element, GMR element, AMR element, TMR element, MI element or the like is used as the detection unit of the sensor 104.
- the torque transmitted by the rotating shaft 102 is measured based on the change in the magnetic permeability of the rotating shaft 102 detected by the sensor 104 when the automobile is operated. That is, when torque is applied to the rotating shaft 102, the magnetic permeability of the rotating shaft 102 changes based on the inverse magnetostrictive effect. Specifically, since the torque causes a tensile stress in the direction of 45 degrees with respect to the axial direction (and a compressive stress in a direction perpendicular thereto) to the rotational shaft 102, the rotational shaft is based on the inverse magnetostrictive effect. The magnetization of 102 is tilted from the circumferential direction to the axial direction.
- the bearing that rotatably supports the rotating shaft with respect to the housing or the like is the rolling bearing 101, and the rolling bearing 101 has a smaller friction loss than the sliding bearing. Therefore, it is possible to measure the torque while improving the torque transmission efficiency by the rotating shaft 102.
- the sensor 104 is supported by a portion of the sensor support member 103 attached to one end portion in the axial direction of the outer ring 105 that protrudes to one side in the axial direction from the one end surface in the axial direction of the outer ring 105. For this reason, the sensor 104 can be handled integrally with the rolling bearing 101. Therefore, it can be easily assembled to the place of use.
- the axial dimension of the outer ring 105 can be reduced as compared with the structure in which the sensor is supported on the inner peripheral surface of the outer ring. Therefore, the material cost and processing cost of the outer ring 105 can be suppressed.
- the rotating shaft 102 is made of a magnetic metal.
- the magnetic metal include bearing steels such as SUJ2 and SUJ3, carburized steels such as SCr420 and SCM420, carbon steels such as S53C, SK5, etc.
- various magnetic steels called tool steel those having an oxygen concentration of 20 ppm or less, a titanium concentration of 100 ppm or less, and a sulfur concentration of 0.05% or less may be used. That is, as the magnetic metal constituting the rotating shaft 102, magnetic steel that sufficiently suppresses the concentrations of oxygen, titanium, and sulfur, which are the formation elements of non-metallic inclusions, may be used. Accordingly, in the case of the present modification, the number of non-metallic inclusions having a square root of 5 ⁇ m or more existing in the surface area of 100 mm 2 of the rotating shaft 102 is 1000 or less.
- the arithmetic average roughness Ra (at least the portion of the outer peripheral surface of the rotating shaft 102 that is opposed to the sensor 104 in the radial direction (the portion located on one side in the axial direction of the inner ring raceway 110). JIS B 0601) is stored in the range of Ra ⁇ 0.5 ⁇ m by polishing or the like.
- magnetic steel such as SUJ2 having an oxygen concentration of 20 ppm or less, a titanium concentration of 100 ppm or less, and a sulfur concentration of 0.05% or less is used as the magnetic metal constituting the rotating shaft 102. Accordingly, the number of non-metallic inclusions having a square root of 5 ⁇ m or more existing in an area of 100 mm 2 on the surface of the rotating shaft 102 is 1000 or less. For this reason, it is possible to stabilize the inverse magnetostriction characteristics of the rotating shaft 102 by reducing the number of non-metallic inclusions contained in the magnetic steel constituting the rotating shaft 102 and serving as stress concentration sources.
- the surface roughness of at least the portion facing the sensor 104 in the radial direction on the outer peripheral surface of the rotating shaft 102 is good (within the range of Ra ⁇ 0.5 ⁇ m). It is possible to further stabilize the inverse magnetostriction characteristics of the portion where the roughness is good. As a result, highly accurate torque measurement can be performed.
- the rotating shaft 102 is made of a magnetic metal, and magnetic steel may be used as the magnetic metal.
- the surface of the rotating shaft 102 at least a portion facing the sensor 104 in the radial direction ⁇ a portion of the outer peripheral surface of the rotating shaft 102 located adjacent to one side of the inner ring raceway 110 in the axial direction (right side in FIG. 23) ⁇ In the entire surface including the portion), the area ratio of carbide is 20% or less, and the area ratio of nitride is 3.0% or less.
- the magnetic metal constituting the rotary shaft 102 for example, bearing steels such as SUJ2 and SUJ3, carburized steels such as SCr420 and SCM420, carbon steels such as S53C, tool steels such as SK5, etc.
- the carbon and nitrogen concentrations which are the precipitates of carbides and nitrides as precipitates, are below a predetermined value (the amount of carbon and nitrogen added at the time of iron making or iron making is a predetermined value)
- the following regulations are used.
- the carbon concentration is 1.5% or less and the nitrogen concentration is 0.5% in at least the portion (including the entire surface) facing the sensor 104 in the radial direction of the surface of the rotating shaft 102.
- the area ratio of carbide in the portion (including the entire surface) is set to 20% or less
- the area ratio of nitride is set to 3.0% or less.
- magnetic steel is used as the magnetic metal constituting the rotating shaft 102, and at least a portion of the surface of the rotating shaft 102 that faces the sensor 104 in the radial direction (the entire surface including the portion). ),
- the area ratio of carbide is 20% or less, and the area ratio of nitride is 3.0% or less. That is, the number of precipitates (carbides and nitrides) that are present in a portion (the entire surface including the portion) facing the sensor 104 in the radial direction and that is a concentration source of stress is sufficiently reduced. For this reason, the inverse magnetostriction characteristic of the rotating shaft 102 can be stabilized.
- the rotating shaft 102 since the surface roughness of the outer peripheral surface of the rotating shaft 102 at least in the portion facing the sensor 104 in the radial direction is good (contains in the range of Ra ⁇ 0.5 ⁇ m), the rotating shaft The inverse magnetostriction characteristic of 102 can be further stabilized. As a result, highly accurate torque measurement can be performed.
- FIG. 1 A sixteenth example of the embodiment of the present invention will be described with reference to FIG.
- the configuration of the sensor 104a is different from that of the fifteenth example of the embodiment described above. That is, in the case of this example, the coil 115 disposed concentrically with the rotating shaft 102 is used as a detection unit of the sensor 104a at a position surrounding the rotating shaft 102. In use, an AC voltage is applied to the coil 115 to generate an AC magnetic field around the coil 115. Instead, in this example, the rotating shaft 102 is not magnetized.
- the output signal of the sensor 104a changes according to the magnetic permeability of the rotating shaft 102.
- the reason for this is that when the magnetic permeability of the rotating shaft 102 changes, the magnetic flux passing through the inside of the coil 115, which is the detection part of the sensor 104a, changes, and the inductance (impedance) of the coil 115 changes accordingly. is there.
- the torque transmitted by the rotating shaft 102 can be obtained from the output signal of the sensor 104a.
- the manufacturing cost can be reduced because the magnetizing step of the rotating shaft 102 can be omitted at the time of manufacturing.
- Other configurations and operational effects are the same as in the fifteenth example of the embodiment described above.
- the rotating shaft 102a which is a rotating body is different from that of the fifteenth example of the embodiment shown in FIG. That is, in this example, the rotating shaft 102a includes a rotating shaft main body 116 made of metal such as steel and a magnetostrictive film 117 made of a magnetostrictive material, which is a magnetostrictive effect portion.
- An inner ring raceway 110 is provided on a portion of the outer peripheral surface of the rotating shaft main body 116 that is radially opposed to the outer ring raceway 109 provided on the inner peripheral face of the outer ring 105.
- the magnetostrictive film 117 is fixed as a film made of a magnetostrictive material (fixed as a film such as plating, or the like on the entire circumference of a portion of the outer peripheral surface of the rotating shaft main body 116 facing the sensor 104 in the radial direction, or The magnetostrictive material is bonded and fixed in the form of a film.
- the magnetostrictive film 117 is magnetized in the circumferential direction together with the rotating shaft main body 116.
- the torque transmitted by the rotating shaft 102a is measured based on the change in the magnetic permeability of the magnetostrictive film 117 detected by the sensor 104.
- nickel plating can be preferably used.
- the mating member in this example, the rotary shaft main body 116 is made of steel having a carbon concentration of 0.1% or more, or an aluminum alloy if there is no problem in strength.
- the magnetostrictive film 117 is in the form of a film, a film made of nickel can be suitably used.
- Other configurations and operational effects are the same as those of the fifteenth example of the embodiment shown in FIG.
- the rotating shaft 102a includes a rotating shaft main body 116 made of magnetic steel such as steel for machine structural use (the concentration of the three elements oxygen, titanium, and sulfur is not particularly limited) and a magnetostriction made of magnetic metal that is a magnetostrictive effect portion. And a film 117.
- An inner ring raceway 110 is provided on a portion of the outer peripheral surface of the rotating shaft main body 116 that is radially opposed to the outer ring raceway 109 provided on the inner peripheral face of the outer ring 105.
- the magnetostrictive film 117 is fixed as a coating (for example, a sprayed coating) on the entire circumference of the outer peripheral surface of the rotating shaft main body 116 that is opposed to the sensor 104 in the radial direction.
- a coating for example, a sprayed coating
- the magnetic metal constituting the magnetostrictive film 117 the same magnetic steel as the rotating shaft 102 of the first modification of the fifteenth example of the embodiment shown in FIG. 23 is used.
- the number of non-metallic inclusions having a square root of 5 ⁇ m or more existing in an area of 100 mm 2 on the outer peripheral surface of the magnetostrictive film 117 is within 1000.
- the magnetostrictive film 117 is magnetized in the circumferential direction together with the rotating shaft main body 116.
- the arithmetic average roughness Ra of the outer peripheral surface of the magnetostrictive film 117 is restricted to a range of Ra ⁇ 0.5 ⁇ m. For this reason, in the stage before forming the magnetostrictive film 117, the process of finishing the outer peripheral surface of the rotating shaft main body 116 serving as the base material surface smoothly, and in the stage after forming the magnetostrictive film 117, the magnetostrictive film 117 is formed. And at least one of the processes of smoothing the outer peripheral surface of the film. The torque transmitted by the rotating shaft 102a is measured based on the change in the magnetic permeability of the magnetostrictive film 117 detected by the sensor 104. Other configurations and operational effects are the same as those of the first modification of the fifteenth example of the embodiment shown in FIG.
- the rotating shaft 102a includes a rotating shaft main body 116 made of magnetic steel such as steel for machine structural use (the area ratio of carbide and nitride on the surface is not particularly limited), and a magnetic metal part that is a magnetostrictive effect portion.
- the magnetostrictive film 117 may be configured.
- the magnetostrictive film 117 is fixed as a coating (for example, a thermal spray coating) on the entire circumference of a portion of the outer peripheral surface of the rotating shaft main body 116 that faces the sensor 104 in the radial direction.
- the magnetic metal constituting the magnetostrictive film 117 magnetic steel similar to the rotating shaft 102 of the second modification of the fifteenth example of the embodiment shown in FIG. 23 is used.
- the carbon concentration in the outer peripheral surface of the magnetostrictive film 117 is set to 1.5% or less, and the nitrogen concentration is set to 0.5% or less, so that the carbide in the outer peripheral surface of the magnetostrictive film 117 is reduced.
- the area ratio is 20% or less, and the area ratio of nitride is 3.0% or less.
- the arithmetic average roughness Ra of the outer peripheral surface of the magnetostrictive film 117 is restricted to a range of Ra ⁇ 0.5 ⁇ m.
- the rolling bearing 101 a includes an inner ring 118 in addition to the outer ring 105, the plurality of needles 106 and 106, and the cage 107.
- the inner ring 118 not the rotating shaft 102b, corresponds to a rotating body, and the entire inner ring 118 (at least on the one side in the axial direction from the portion where the inner ring raceway 110 is formed) functions as a magnetostrictive effect portion.
- the rotating shaft 102b is made of mechanical structural steel.
- the inner ring 118 is made of a magnetostrictive material in a cylindrical shape, and is fitted and fixed to the outer peripheral surface of the rotating shaft 102b by an interference fit.
- a cylindrical inner ring raceway 110 is provided on a portion of the outer peripheral face of the inner ring 118 that is radially opposed to the outer ring raceway 109 provided on the inner peripheral face of the outer ring 105. Further, one axial end portion (the right end portion in FIG. 26) of the inner ring 118 protrudes to one axial side from the axial end surface of the outer ring 105, and this protruding portion faces the sensor 104 in the radial direction. Yes.
- the inner ring 118 is magnetized in the circumferential direction.
- the inner ring 118 when torque is applied to the rotating shaft 102b, the inner ring 118 is elastically twisted and deformed together with the rotating shaft 102b, and the magnetic permeability of the inner ring 118 changes accordingly.
- the torque is measured by detecting a change in the magnetic permeability of the inner ring 118 by the sensor 104.
- the magnetostrictive effect portion since the magnetostrictive effect portion is the inner ring 118, the volume of the magnetostrictive effect portion is smaller than that in the case of using the magnetostrictive effect portion as the rotation axis as in the fifteenth example of the embodiment. it can.
- the rotating shaft 102b may be made of magnetic steel such as steel for machine structure (the concentration of the three elements oxygen, titanium and sulfur is not particularly limited). Further, the inner ring 118 may be made cylindrical by a magnetic metal. In the case of this modification, the same magnetic steel as the rotating shaft 102 of the first modification of the fifteenth embodiment of the embodiment shown in FIG. 23 is used as the magnetic metal constituting the inner ring 118. As a result, the number of non-metallic inclusions having a square root of 5 ⁇ m or more existing in an area of 100 mm 2 on the surface of the inner ring 118 is reduced to 1000 or less. The inner ring 118 is magnetized in the circumferential direction.
- the arithmetic average roughness Ra at the axial end portion of the outer peripheral surface, which is at least the portion facing the sensor 104 in the radial direction, on the surface of the inner ring 118 is restricted to a range of Ra ⁇ 0.5 ⁇ m. Yes.
- the rotating shaft 102b may be made of magnetic steel such as steel for machine structure (the area ratio of carbide and nitride on the surface is not particularly limited). Further, the inner ring 118 may be made cylindrical by a magnetic metal. In the case of this modification, the same magnetic steel as the rotating shaft 102 of the second modification of the fifteenth embodiment of the embodiment shown in FIG. 23 is used as the magnetic metal constituting the inner ring 118. As a result, the carbon concentration in the axial end portion (the entire surface including the end portion in the axial direction) of the outer peripheral surface, which is at least the portion facing the sensor 104 in the radial direction, of the surface of the inner ring 118 is 1.5.
- the inner ring 118 is magnetized in the circumferential direction. Further, the arithmetic average roughness Ra at the axial end portion of the outer peripheral surface, which is at least the portion facing the sensor 104 in the radial direction, on the surface of the inner ring 118 is restricted to a range of Ra ⁇ 0.5 ⁇ m. Yes.
- the inner ring 118a which is a rotating body is different from the case of the eighteenth example of the above-described embodiment. That is, in this example, the inner ring 118a includes a cylindrical inner ring main body 119 made of steel or aluminum alloy having a carbon concentration of 0.1% or more, and a magnetostrictive film 117a made of a magnetostrictive material, which is a magnetostrictive effect portion. Become. The inner ring main body 119 is externally fitted and fixed to the outer peripheral surface of the rotating shaft 102b by an interference fit.
- an inner ring raceway 110 is provided in a portion of the outer peripheral surface of the inner ring main body 119 that is radially opposed to the outer ring raceway 109 provided on the inner peripheral surface of the outer ring 105.
- the magnetostrictive film 117a is formed on the entire outer periphery of the inner ring main body 119 at one end in the axial direction, which is a portion facing the sensor 104 in the radial direction, as in the case of the seventeenth example of the above-described embodiment. It is fixed as a material film.
- the magnetostrictive film 117a is magnetized in the circumferential direction together with the inner ring main body 119.
- the inner ring 118a includes a cylindrical inner ring body 119 made of magnetic steel such as mechanical structural steel or bearing steel (the concentration of oxygen, titanium, and sulfur is not particularly limited), and a magnetostrictive effect portion. And a magnetostrictive film 117a made of metal.
- the configuration of the magnetostrictive film 117a is the same as that of the magnetostrictive film 117 of the first modification of the seventeenth example of the embodiment shown in FIG.
- the inner ring 118a is a cylindrical inner ring body 119 made of magnetic steel (such as mechanical structural steel or bearing steel) (the area ratio of carbide and nitride on the surface is not particularly limited) and a magnetostrictive effect portion. And a magnetostrictive film 117a made of magnetic metal.
- the configuration of the magnetostrictive film 117a is the same as that of the magnetostrictive film 117 of the second modification of the seventeenth example of the embodiment shown in FIG.
- FIG. 1 A twentieth example of the embodiment of the present invention will be described with reference to FIG.
- a cylindrical shape is formed on a portion of the outer peripheral surface of the rotating shaft 102b adjacent to one axial side of the inner ring 118b (on the right side in FIG. 28) and facing the sensor 104 in the radial direction.
- the sleeve 120 is externally fixed by an interference fit.
- the rotating shaft 102b or the inner ring 118b but the sleeve 120 corresponds to a rotating body, and the entire sleeve 120 functions as a magnetostrictive effect portion.
- the rotating shaft 102b is made of machine structural steel
- the inner ring 118b is made of machine structural steel or bearing steel.
- the sleeve 120 is made of a magnetostrictive material in a cylindrical shape and is magnetized in the circumferential direction.
- the sleeve 120 when a torque is applied to the rotating shaft 102b, the sleeve 120 is elastically twisted together with the rotating shaft 102b, and the permeability of the sleeve 120 changes accordingly.
- the torque is measured based on the change in the magnetic permeability of the sleeve 120 detected by the sensor 104.
- the magnetostrictive effect portion is the sleeve 120, the volume of the magnetostrictive effect portion is smaller than that in the case of using the magnetostrictive effect portion as the rotation axis as in the fifteenth example of the embodiment. it can.
- the rotating shaft 102b may be made of magnetic steel such as steel for machine structure (the concentration of the three elements oxygen, titanium, and sulfur is not particularly limited).
- the inner ring 118b may be made of magnetic steel (such as oxygen, titanium and sulfur in any concentration) such as mechanical structural steel or bearing steel.
- the sleeve 120 may be made of a magnetic metal. In the case of this modification, as the magnetic metal constituting the sleeve 120, the same magnetic steel as the rotating shaft 102 of the first modification of the fifteenth example of the embodiment shown in FIG. 23 is used.
- the number of non-metallic inclusions having a square root of 5 ⁇ m or more existing in an area of 100 mm 2 on the surface of the sleeve 120 is within 1000.
- the arithmetic average roughness Ra of the outer surface of the sleeve 120 that faces the sensor 104 in the radial direction is restricted to a range of Ra ⁇ 0.5 ⁇ m.
- the rotating shaft 102b may be made of magnetic steel such as steel for machine structural use (the area ratio of carbide and nitride on the surface is not particularly limited).
- the inner ring 118b may be made of magnetic steel such as steel for machine structure or bearing steel (the area ratio of carbide and nitride on the surface is not particularly limited).
- the sleeve 120 may be made of a magnetic metal in a cylindrical shape. In the case of this modification, as the magnetic metal constituting the sleeve 120, the same magnetic steel as the rotating shaft 102 of the second modification of the fifteenth example of the embodiment shown in FIG. 23 is used.
- the carbon concentration is 1.5% or less and the nitrogen concentration is 0.5% or less on at least the outer peripheral surface of the surface of the sleeve 120 that is the portion facing the sensor 104 in the radial direction.
- the carbide area ratio is 20% or less and the nitride area ratio is 3.0% or less on the outer peripheral surface (the entire surface including the outer peripheral surface).
- the arithmetic average roughness Ra of the outer surface of the sleeve 120 that faces the sensor 104 in the radial direction is restricted to a range of Ra ⁇ 0.5 ⁇ m.
- the configuration of the sleeve 120a which is a rotating body, is different from that of the twentieth example of the above-described embodiment. That is, the sleeve 120a includes a cylindrical sleeve body 121 made of steel or aluminum alloy having a carbon concentration of 0.1% or more, and a magnetostrictive film 117b made of a magnetostrictive material, which is a magnetostrictive effect portion.
- the sleeve main body 121 is externally fitted with an interference fit to a portion of the outer peripheral surface of the rotating shaft 102b adjacent to one side of the inner ring 118b in the axial direction (right side in FIG. 29) and opposed to the sensor 104 in the radial direction. It is fixed.
- the magnetostrictive film 117b is fixed to the entire circumference of the outer peripheral surface of the sleeve body 121 as a film made of a magnetostrictive material similar to that in the seventeenth example of the embodiment.
- the magnetostrictive film 117b is magnetized together with the sleeve main body 121 in the circumferential direction.
- the sleeve 120a includes a sleeve main body 121 formed in a cylindrical shape from magnetic steel (such as oxygen, titanium, and sulfur), and a magnetostrictive effect portion. And a magnetostrictive film 117b made of metal.
- the configuration of the magnetostrictive film 117b is the same as that of the magnetostrictive film 117 of the first modification of the seventeenth example of the embodiment shown in FIG.
- the sleeve 120a is a sleeve main body 121 made of a magnetic steel such as machine structural steel or bearing steel (the area ratio of carbide and nitride on the surface is not particularly limited) and a magnetostrictive effect portion. And a magnetostrictive film 117b made of magnetic metal.
- the configuration of the magnetostrictive film 117b is the same as that of the magnetostrictive film 117 of the second modification of the seventeenth example of the embodiment shown in FIG.
- the arithmetic average roughness Ra of the outer peripheral surface of the sleeve 120 b may be regulated to a range of Ra ⁇ 0.5 ⁇ m at least at one end portion in the axial direction facing the sensor 104.
- the basic configuration is the same as that of the sixteenth example of the embodiment shown in FIG. 24 described above, and the sensor support structure for the outer ring is different from that of the sixteenth example. That is, in the case of this example, the sensor 104b having the coil 115a as a detection portion is provided on the support cylinder portion 122 provided (integrally formed) on one axial side (right side in FIGS. 33 and 34) of the outer ring 105a. The sensor 104b is embedded in a synthetic resin holder 123 together with the support cylinder 122 in a state of being fitted and fixed.
- the support cylinder part 122 comprises the part located in the axial direction one side rather than the inward flange part 108 of the axial direction one side among the outer rings 105a.
- the radial thickness of the support cylindrical portion 122 is smaller than the radial thickness of the portion adjacent to the other axial side of the support cylindrical portion 122 (left side in FIGS. 33 and 34). More specifically, the outer diameter dimension of the support cylinder part 122 is the outer diameter dimension of the part adjacent to the other axial side of the support cylinder part 122 (the outer diameter dimension of the part where the inward flange part 108 on one axial side is located). Smaller than).
- the inner diameter dimension of the support cylinder part 122 is larger than the inner diameter dimension of the part adjacent to the other axial side of the support cylinder part 122 (inner diameter dimension of the inward flange part 108 on one axial side).
- an uneven portion in the axial direction is provided on the outer peripheral surface of the support cylinder portion 122.
- the concavo-convex portion is configured by providing a plurality of concave grooves 124, 124 each extending over the entire circumference on the outer peripheral surface of the support cylindrical portion 122 at equal intervals in the axial direction.
- a step surface 125 facing toward one side in the axial direction is provided at a portion near the one end in the axial direction of the inner peripheral surface of the support cylinder portion 122.
- the inner diameter dimension of the support cylinder part 122 is a part of the axial direction one side rather than the level
- the outer ring 105a of this example provided with such a support cylinder 122 is made by cutting, grinding or the like on a steel tubular intermediate material made by casting, forging or the like.
- the sensor 104b includes a sensor casing 126 and a coil 115a that is a detection unit.
- the sensor casing 126 is made of a nonmagnetic material into a cylindrical shape.
- the sensor housing 126 has a concave portion 127 that extends around the entire circumference in the axially intermediate portion of the outer peripheral surface, and an outward flange portion 128 that extends around the entire circumference at one end in the axial direction.
- a nonmagnetic material constituting such a sensor casing 126 an aluminum alloy or ceramic having high thermal conductivity can be preferably used.
- the coil 115 a is installed inside the recess 127 and concentrically with the sensor housing 126.
- the coil 115a is bonded and fixed to the bottom surface of the recess 127 while being formed on a flexible substrate (not shown), or is drawn on the bottom surface of the recess 127.
- the outer peripheral surface of the coil 115a (and the flexible substrate) is arranged on the inner diameter side of the outer peripheral surface of the outer peripheral surface of the sensor casing 126 that is out of the recess 127.
- the sensor 104 b is configured such that a portion of the sensor casing 126 on the other side in the axial direction than the outward flange portion 128 (further removed from the concave portion 127) is located on the inner peripheral surface of the support cylinder portion 122 more than the step surface 125.
- the entire support cylinder 122 and the sensor 104b are embedded in a holder 123 made of synthetic resin.
- synthetic resin constituting the holder 123 those having heat resistance and a small linear expansion coefficient such as polyphenylene sulfide (PPS) and polyamide 66 can be suitably used.
- PPS polyphenylene sulfide
- polyamide 66 polyamide 66
- the holder 123 is injection-molded, a part of the synthetic resin constituting the holder 123 is allowed to enter the concave grooves 124 and 124 formed on the outer peripheral surface of the support cylinder portion 122, thereby The coupling strength of the holder 123 is increased.
- the outer diameter of the holder 123 is smaller than the outer diameter of a portion of the outer ring 105 a adjacent to the other axial side of the support cylinder portion 122.
- wheel 105a as mentioned above is arrange
- the sensor 104b is arranged with respect to the support cylinder portion 122 provided on one axial side portion of the outer ring 105a (with the support cylinder portion 122 being disposed on the inner diameter side of the support cylinder portion 122). In a manner embedded in a synthetic resin holder 123 together with the portion 122. For this reason, the sensor 104b can be handled integrally with the rolling bearing 101b including the outer ring 105a. Therefore, it can be easily assembled to the place of use. In addition, it is easier to accurately manage the facing distance between the sensor 104b and the magnetostrictive effect portion (rotating shaft 102) than the structure in which the sensor is supported by the housing.
- the support cylinder portion 122 that supports the sensor 104b is a part of the outer ring 105a, the support strength of the sensor 104b with respect to the outer ring 105a can be increased. Further, since the support cylindrical portion 122 has a smaller radial thickness than a portion adjacent to the other side in the axial direction, an increase in the weight of the outer ring 105a due to the provision of the support cylindrical portion 122 can be suppressed. Furthermore, since the sensor 104b is embedded in the holder 123, it is possible to prevent foreign matter such as magnetic powder from deteriorating torque measurement accuracy from adhering to the sensor 104b. Other configurations and operations are the same as those of the sixteenth example of the embodiment shown in FIG.
- the present invention can be implemented by appropriately combining the structures of the fifteenth to twenty-third examples of the embodiment.
- the seventeenth to twenty-second examples of the embodiment it is possible to omit the magnetization of the magnetostrictive effect portion and to use the sensor 104a used in the sixteenth example of the embodiment and having the detection unit as the coil 115.
- a magnetic detection element can also be employed as the sensor detection unit.
- a magnetic flux generation source is provided by, for example, magnetizing the magnetostrictive effect portion.
- the sensor support structure for the outer ring of the twenty-third example of the embodiment can also be applied to the structures of the fifteenth example and the seventeenth to twenty-second examples of the embodiment.
- any of a magnetic detection element and a coil can be employed as the sensor detection unit.
- the torque measuring device of this example includes a rolling bearing 201, a rotating shaft 202, a magnetostrictive film 203, a sensor support member 204, and a sensor 205.
- a combined body of the rotating shaft 202 and the magnetostrictive film 203 corresponds to a rotating body, and the magnetostrictive film 203 functions as a magnetostrictive effect portion.
- the rolling bearing 201 is a shell-type needle bearing, and includes an outer ring 206, a plurality of needles 207 and 207, each of which is a rolling element, and a cage 208.
- the outer ring 206 is formed into a cylindrical shape by subjecting a steel plate material to plastic processing such as drawing, and includes inward flange portions 209 and 209 at both ends in the axial direction. Further, a portion of the inner peripheral surface of the outer ring 206 that is sandwiched between the inwardly facing flange portions 209 and 209 is a cylindrical outer ring raceway 210.
- the outer ring 206 is fitted in a housing or the like constituting a power train of the automobile and does not rotate during use.
- the needles 207 and 207 are provided between the outer ring raceway 210 and the cylindrical inner ring raceway 211 provided on the outer peripheral surface of the rotating shaft 202 so as to be able to roll while being held by the cage 208. It has been.
- Each needle 207, 207 is made of steel.
- the cage 208 is made of steel or synthetic resin.
- the rotating shaft 202 is a torque transmission shaft such as a transmission rotating shaft, a differential gear rotating shaft, a propeller shaft, and a drive shaft that constitutes the power train of the automobile, and is disposed on the inner diameter side of the rolling bearing 201. ing.
- the rotating shaft 202 is made of magnetic steel such as bearing steels such as SUJ2 and SUJ3, carburized steels such as SCr420 and SCM420, carbon steels such as S53C, and tool steels such as SK5, as defined in JIS.
- An inner ring raceway 211 is provided on a portion of the outer peripheral surface of the rotating shaft 202 that faces the outer ring raceway 210 in the radial direction.
- the magnetostrictive film 203 is magnetostrictive compared to the magnetic steel constituting the rotary shaft 202 on the entire circumference of the outer peripheral surface of the rotary shaft 202 adjacent to one side of the inner ring raceway 211 in the axial direction (the right side in FIG. 40).
- Fixed (magnetostrictive material) as a film made of a magnetostrictive material (eg, pure Ni, Fe—Ni alloy, Fe—Co alloy, Fe—Al alloy, amorphous alloy, etc.), which is a magnetic metal having a sufficiently large constant It is fixed as a coating such as plating, or bonded and fixed in the form of a magnetostrictive material.
- the inner peripheral surface of the magnetostrictive film 203 is in contact with the outer peripheral surface of the rotating shaft 202 over the entire periphery.
- the magnetostrictive film 203 is plated, nickel plating can be preferably used.
- the mating member in this example, the rotating shaft 202
- the rotating shaft 202 is made of steel having a carbon concentration of 0.1% or more.
- the magnetostrictive film 203 is magnetized in the circumferential direction together with the rotating shaft 202. In the case of this example, a portion of the outer peripheral surface of the rotating shaft 202 to which the magnetostrictive film 203 is fixed (contacted) is the mounting surface.
- the sensor support member 204 is made of a metal such as steel or a synthetic resin in an annular shape, and is attached to one end portion in the axial direction of the outer ring 206 (right end portion in FIG. 40).
- the sensor support member 204 is connected to a fitting cylinder portion 212 that is fitted and fixed to one end portion (inward flange portion 209) in the axial direction of the outer ring 206 by an interference fit, and to one end portion in the axial direction of the fitting cylinder portion 212.
- an annular support portion 213 projecting to one axial side from the one axial end surface of the outer ring 206.
- the senor 205 is disposed on the inner peripheral surface of the support portion 213 constituting the sensor support member 204 in a state of being close to the magnetostrictive film 203 by causing the detection portion to face and oppose the outer peripheral surface of the magnetostrictive film 203.
- a magnetic detection element 215 such as a Hall element, Hall IC, MR element, GMR element, AMR element, TMR element, MI element or the like is used.
- the maximum value of ⁇ area (which is the square root of the product of the major axis a and the minor axis b of the nonmetallic inclusions present on the attachment surface of the magnetostrictive film 203 provided on the outer peripheral surface of the rotating shaft 202 (on this attachment surface).
- ⁇ area which is the dimension of the largest non-metallic inclusion existing is regulated to 80 ⁇ m or less.
- concentration of non-metallic inclusion product elements (oxygen, titanium, sulfur, etc.) contained in the magnetic steel constituting the rotating shaft 202 is adjusted.
- the maximum height Rz of the mounting surface is restricted to 12 ⁇ m or less by polishing or the like.
- the mounting surface has a hardness of HV400 or more, a maximum crystal grain size of 80 ⁇ m or less, and a residual austenite amount of 45% by volume or less. Yes.
- the torque transmitted by the rotating shaft 202 is measured based on the change in the magnetic permeability of the magnetostrictive film 203 detected by the sensor 205 during driving of the automobile. That is, when torque is applied to the rotating shaft 202, stress acts on the magnetostrictive film 203 fixed to the mounting surface, which is a part of the outer peripheral surface of the rotating shaft 202. Therefore, the transmission of the magnetostrictive film 203 is based on the inverse magnetostrictive effect. Magnetic susceptibility changes.
- the tensile stress in the direction of 45 degrees with respect to the axial direction acts on the magnetostrictive film 203 by the torque, so that the magnetostrictive film is based on the inverse magnetostrictive effect.
- the magnetization of 203 is tilted from the circumferential direction to the axial direction.
- a leakage magnetic flux is generated outside the magnetostrictive film 203, and the leakage magnetic flux passes through the magnetic detection element 215 which is a detection unit of the sensor 205, whereby the output signal of the sensor 205 changes. Therefore, if the relationship between the output signal of the sensor 205 and the torque is examined in advance, the torque can be obtained from the output signal of the sensor 205 using this relationship.
- the calculation for obtaining the torque is performed by a calculator (not shown).
- the maximum value of ⁇ area of non-metallic inclusions present on the mounting surface of the magnetostrictive film 203 provided on the outer peripheral surface of the rotating shaft 202 is regulated to 80 ⁇ m or less, and the mounting surface The maximum height Rz is regulated to 12 ⁇ m or less.
- the stress concentration part based on the nonmetallic inclusion and roughness unevenness which exist in a mounting surface can be decreased, and it can suppress that a local plastic deformation arises in a mounting surface.
- the hardness of the mounting surface is regulated to HV400 or more, and the maximum crystal grain size on the mounting surface is regulated to 80 ⁇ m or less. For this reason, it is possible to further suppress the occurrence of local plastic deformation on the mounting surface. Also, if the amount of retained austenite on the mounting surface is large, dimensional changes are likely to occur on the mounting surface at high temperatures. In this regard, in this example, the amount of retained austenite on the mounting surface is regulated to 45% by volume or less. For this reason, the dimensional change which arises on a mounting surface at the time of high temperature can be suppressed.
- the senor 205 is supported by a portion of the sensor support member 204 attached to one end in the axial direction of the outer ring 206 that protrudes to one side in the axial direction from the one end surface in the axial direction of the outer ring 206. Yes. For this reason, it is easier to accurately manage the positional relationship between the sensor 205 and the magnetostrictive film 203 and to prevent the positional relationship from fluctuating due to vibration, compared to a structure in which the sensor 205 is supported by the housing. . Therefore, highly accurate torque measurement can be performed. Furthermore, the axial dimension of the outer ring 206 can be reduced as compared with the structure in which the sensor is supported on the inner peripheral surface of the outer ring. Therefore, the material cost and processing cost of the outer ring 206 can be suppressed.
- FIG. 2 A second example of the embodiment of the present invention will be described with reference to FIG.
- the configuration of the sensor 205a is different from that of the 24th example of the above-described embodiment. That is, a coil 216 disposed concentrically with the rotating shaft 202 and the magnetostrictive film 203 is used as a detection unit of the sensor 205 a at a position surrounding the rotating shaft 202 and the magnetostrictive film 203. In use, an AC voltage is applied to the coil 216 to generate an AC magnetic field around the coil 216. Instead, in this example, the rotating shaft 202 and the magnetostrictive film 203 are not magnetized.
- the output signal of the sensor 205a varies according to the magnetic permeability of the magnetostrictive film 203. This is because when the magnetic permeability of the magnetostrictive film 203 changes, the magnetic flux passing through the inside of the coil 216 that is the detection unit of the sensor 205a changes, and accordingly, the inductance (impedance) of the coil 216 changes. is there. Accordingly, also in this example, as in the case of the twenty-fourth example of the embodiment, the torque transmitted by the rotating shaft 202 to which the magnetostrictive film 203 is fixed can be obtained from the output signal of the sensor 205a.
- the manufacturing cost can be reduced because the magnetizing step of the rotating shaft 202 and the magnetostrictive film 203 can be omitted during the manufacturing.
- Other configurations and operational effects are the same as in the case of the twenty-fourth example of the embodiment described above.
- the rolling bearing 201 a includes an inner ring 217 in addition to the outer ring 206, the plurality of needles 207 and 207, and the cage 208.
- the combined body of the inner ring 217 and the rotating shaft 202 corresponds to the rotating body, and the entire inner ring 217 (at least on the one side in the axial direction from the portion where the inner ring raceway 211 is formed) is magnetostrictive. It functions as an effect part.
- the inner ring 217 is made of a magnetostrictive material in a cylindrical shape, and is fitted and fixed to the outer peripheral surface of the rotating shaft 202 with an interference fit.
- a cylindrical inner ring raceway 211 is provided on a portion of the outer peripheral surface of the inner ring 217 that is radially opposed to the outer ring raceway 210 provided on the inner peripheral surface of the outer ring 206. Further, one end portion in the axial direction of the inner ring 217 (right end portion in FIG. 42) protrudes to one side in the axial direction from the one end surface in the axial direction of the outer ring 206, and the protruding portion faces the sensor 205 in the radial direction. .
- the mounting surface a portion where the inner ring 217 is externally fitted and fixed (contacted) is the mounting surface.
- the properties of the mounting surface maximum value of ⁇ area of nonmetallic inclusions, maximum height Rz, hardness, maximum crystal grain size, amount of retained austenite
- the inner ring 217 is magnetized in the circumferential direction.
- the inner ring 217 when torque is applied to the rotating shaft 202, the inner ring 217 is elastically twisted and deformed together with the rotating shaft 202, and the magnetic permeability of the inner ring 217 changes accordingly.
- the torque is measured based on the change in the magnetic permeability of the inner ring 217 detected by the sensor 205.
- the troublesome process of fixing the magnetostrictive film 203 to the outer peripheral surface of the rotating shaft 202 having a large volume and weight can be eliminated.
- the structure shown in the drawing is completed by simply fitting the inner ring 217 constituting the rolling bearing 201a (which is supported by the sensor support member 204 with the sensor support member 204) onto the mounting surface of the rotary shaft 202 by an interference fit. I can do things. For this reason, manufacture and cost reduction can be achieved.
- Other configurations and operational effects are the same as those of the twenty-fourth example of the embodiment shown in FIG.
- the inner ring 217a externally fitted and fixed to the rotary shaft 202a is a bearing steel such as SUJ2 and SUJ3, carburized steel such as SCr420 and SCM420, carbon steel such as S53C, It is made of magnetic steel such as SK5 tool steel.
- the magnetostrictive film 203a similar to that of the twenty-fourth example of the embodiment is fixed to the entire circumference of one end portion in the axial direction, which is a portion facing the sensor 205 in the radial direction, on the outer peripheral surface of the inner ring 217a.
- a combined body of the rotating shaft 202a, the inner ring 217a, and the magnetostrictive film 203a corresponds to a rotating body, and the magnetostrictive film 203a functions as a magnetostrictive effect portion.
- the combined body of the inner ring 217a and the magnetostrictive film 203a corresponds to the rotating body.
- the properties of the outer peripheral surface of the inner ring 217a (the maximum value of ⁇ area of the nonmetallic inclusion, the maximum height Rz, the hardness, the maximum crystal grain size, the retained austenite
- the amount is regulated in the same manner as in the 24th example of the embodiment.
- the magnetostrictive film 203a is magnetized in the circumferential direction together with the inner ring 217a.
- the torque transmitted by the rotating shaft 202a is measured based on the sensor 205 detecting the change in the magnetic permeability of the magnetostrictive film 203a.
- Other configurations and operational effects are the same as in the forty-second example of the above-described embodiment.
- the outer peripheral surface of the rotating shaft 202 is not a portion where the inner ring 217b is externally fitted, and the outer peripheral surface of the rotating shaft 202 which is not the outer peripheral surface of the inner ring 217b is a portion where the sleeve 218 is externally fitted and fixed. It becomes. For this reason, at least the properties of the mounting surface (maximum value of ⁇ area of nonmetallic inclusions, maximum height Rz, hardness, maximum crystal grain size, amount of retained austenite) of the outer peripheral surface of the rotating shaft 202 are described in the embodiment.
- the sleeve 218 is made of a magnetostrictive material in a cylindrical shape and is magnetized in the circumferential direction.
- the sleeve 218 When torque is applied to the rotating shaft 202, the sleeve 218 is elastically twisted and deformed together with the rotating shaft 202, and the magnetic permeability of the sleeve 218 changes accordingly. In the case of this example, the torque is measured based on the change in the magnetic permeability of the sleeve 218 detected by the sensor 205.
- Other configurations and operational effects are the same as those of the twenty-seventh example of the embodiment described above.
- the sleeve 218a externally fitted and fixed to the rotating shaft 202a is a bearing steel such as SUJ2 and SUJ3, carburized steel such as SCr420 and SCM420, carbon steel such as S53C, SK5, etc.
- a bearing steel such as SUJ2 and SUJ3
- carburized steel such as SCr420 and SCM420
- carbon steel such as S53C, SK5, etc.
- Made of magnetic steel such as tool steel.
- a magnetostrictive film 203b similar to that in the twenty-fourth example of the embodiment is fixed to the entire circumference of the outer peripheral surface of the sleeve 218a.
- a combined body of the rotating shaft 202a, the sleeve 218a, and the magnetostrictive film 203b corresponds to a rotating body, and the magnetostrictive film 203b functions as a magnetostrictive effect portion.
- the combined body of the sleeve 218a and the magnetostrictive film 203b corresponds to the rotating body.
- the outer peripheral surface of the sleeve 218a is not the portion of the outer peripheral surface of the rotating shaft 202a that is fitted and fixed, but the outer peripheral surface of the sleeve 218a is the mounting surface.
- the properties of the mounting surface (maximum value of ⁇ area of nonmetallic inclusion, maximum height Rz, hardness, maximum crystal grain size, amount of retained austenite)
- the regulation is the same as in the case of 24 cases.
- the magnetostrictive film 203b is magnetized in the circumferential direction together with the sleeve 218a.
- the torque transmitted by the rotating shaft 202a is measured based on the sensor 205 detecting a change in the magnetic permeability of the magnetostrictive film 203b.
- Other configurations and operational effects are the same as those of the 44th example of the embodiment described above.
- FIG. 1 A thirtieth example of the embodiment of the present invention will be described with reference to FIG.
- the installation mode of the cylindrical sleeve 218b is different from the case of the 28th example of the embodiment shown in FIG. That is, in the case of this example, the sleeve 218b is externally fitted and fixed to the outer peripheral surface of the rotating shaft 202 by an interference fit, and is fixed to the inner peripheral surface of the inner ring 217b by an internal fit. Further, in this state, one end portion of the sleeve 218b in the axial direction (the right end portion in FIG.
- the magnetization of the magnetostrictive effect unit is omitted, and the sensor 205a having the detection unit as the coil 216, which is used in the twenty-fifth example of the above-described embodiment, is used. Can do.
- the rotation support device of this example includes a rolling bearing 301, a magnetostrictive yoke 302 that is a magnetostrictive member, and a pair of coils 303a and 303b, each of which is a sensor.
- the rolling bearing 301 is a radial deep groove ball bearing, and includes an outer ring 304 that is a stationary ring that does not rotate during use, an inner ring 305 that is a rotating ring that rotates during use, and a plurality of balls 306 and 306 each of which is a rolling element. And a cage 307. Each ball 306, 306 is held between the outer ring 304 and the inner ring raceway 309 formed on the outer peripheral surface of the inner ring 305 while being held by the cage 307. It is provided freely.
- the magnetostrictive yoke 302 is made in an annular shape from a magnetic steel (for example, bearing steel or machine structural steel) as a base material, and a magnetic metal (for example, pure Ni, for example) having a larger magnetostriction constant than the base material on the surface.
- a magnetic steel for example, bearing steel or machine structural steel
- a magnetic metal for example, pure Ni, for example
- the magnetostrictive yoke 302 is externally fixed to the outer ring 304 by an interference fit.
- the film is provided so that the magnetostrictive yoke 302 can easily exhibit the inverse magnetostrictive effect.
- nickel plating can be preferably used.
- the base material is preferably iron having a carbon concentration of 0.1% or more.
- the magnetostrictive yoke 302 has an annular shape as a whole, and an inner diameter side cylindrical portion 310 and an outer diameter side cylindrical portion 311 arranged concentrically with each other, and the inner diameter side and outer diameter side cylindrical portions 310 and 311 face each other.
- a pair of core portions 312a and 312b and four bypass portions 313a and 313b provided in a radial direction in a state where the peripheral surfaces are connected to each other are provided.
- a pair of core portions 312a and 312b, each of which is a column portion, are arranged at two positions on the radially opposite sides of both the inner diameter side and outer diameter side cylindrical portions 310 and 311.
- each bypass part 313a, 313b is arranged at an interval, one on each side in the circumferential direction of each core part 312a, 312b (in the example shown, the distance from each core part 312a, 312b is The central angle is in the range of 40 to 50 degrees). That is, in the magnetostrictive yoke 302, the core portions 312a and 312b and the bypass portions 313a and 313b in the circumferential direction between the outer peripheral surface of the inner diameter side cylindrical portion 310 and the inner peripheral surface of the outer diameter side cylindrical portion 311. Portions deviated from the shape are arc-shaped through holes 317a and 317b.
- the through holes 317a and 317b correspond to the thinned portions.
- the magnetostrictive yoke 302 is fixed concentrically to the outer ring 304 by fitting the inner diameter side cylindrical portion 310 to the outer peripheral surface of the outer ring 304 with an interference fit.
- the film is fixed to the entire surface of the magnetostrictive yoke 302.
- this film can be fixed only to the surfaces of the core portions 312a and 312b of the magnetostrictive yoke 302.
- each coil 303a, 303b is wound around each of the core portions 312a, 312b.
- the temperature includes a bridge made up of coils 303a and 303b (impedances R 2 and R 4 ) and two resistors 315a and 315b (impedances R 1 and R 3 ).
- a compensation circuit is configured.
- an oscillator 316 provided in the temperature compensation circuit applies an AC voltage V to both ends of the bridge, thereby passing an AC current through the coils 303a and 303b, thereby penetrating the coils 303a and 303b. Generate magnetic flux.
- Each magnetic circuit portion 314a (14b) includes a core portion 312a (312b), a pair of bypass portions 313a and 313a (313b and 313b) provided on both sides in the circumferential direction of the core portion 312a (312b), and an inner diameter side.
- each of the bypass portions 313 a and 313 a (313 b and 313 b) has arcuate portions connected at both ends thereof.
- each coil 303a, 303b flows through each magnetic circuit section 314a, 314b along the path indicated by the broken line in FIG. 49 (as an alternating magnetic flux).
- the impedances R 1 and R 3 of the resistors 315a and 315b constituting the temperature compensation circuit shown in FIG. 51 are radial to the rolling bearing 301 in relation to the impedances R 2 and R 4 of the coils 303a and 303b.
- the bridge In the neutral state where no load is applied, the bridge is initially set so that the midpoint voltage of the bridge (voltage between the points PQ) becomes zero.
- at least one of the resistors 315a and 315b is a variable resistor or offset error correction is performed as necessary.
- the inner ring 305 is externally fitted to a rotation shaft (rotation shaft constituting a transmission, rotation shaft constituting a differential gear, propeller shaft, drive shaft, etc.) constituting a power train of an automobile.
- the magnetostrictive yoke 302 is used in a state of being fitted inside the housing. Based on detecting changes in the magnetic permeability of the cores 312a and 312b as changes in the inductance (impedance) of the coils 303a and 303b during driving of the automobile, the load load of the rolling bearing 301 and the load load A physical quantity having a correlation (for example, transmission torque of a rotating shaft) is measured.
- the magnetostrictive yoke 302 is disposed at a position sandwiched between the outer peripheral surface of the outer ring 304 constituting the rolling bearing 301 and the inner peripheral surface of the housing. For this reason, in FIG. 49, when a radial load in the direction indicated by the arrow ⁇ (or arrow ⁇ ) is applied from the rotating shaft to the rolling bearing 301, a pair of core portions 312a constituting the magnetostrictive yoke 302, Of the 312b, the upper core portion 312a (or the lower core portion 312b) is subjected to compressive stress in the vertical direction corresponding to the radial load.
- the magnetic permeability of this upper core part 312a changes with this compressive stress. Specifically, as the compressive stress (the radial load) increases, the magnetic permeability in the vertical direction of the upper core portion 312a (or the lower core portion 312b) decreases. As a result, the inductance of the coil 303a (or 303b) wound around the upper core portion 312a (or the lower core portion 312b) is reduced. Thus, in the case of this example, the inductance of each coil 303a, 303b changes according to the radial load applied to the rolling bearing 301. For this reason, radial load and transmission torque can be measured based on inductance (impedance).
- the impedances of the coils 303a and 303b change when a radial load is applied, and also change when a temperature change occurs.
- the change in the impedance of each coil 303a, 303b due to the load of the radial load depends on the direction of the input of the radial load (whether it is the direction of the arrow ⁇ or the direction of the arrow ⁇ ) of each coil 303a, 303b. It occurs only in one of the coils.
- the midpoint voltage (voltage between points PQ) shown in FIG. 51 corresponding to the difference between the terminals of the coils 303a and 303b is detected, and the midpoint voltage is detected. Based on the above, radial load and transmission torque are measured. In addition, since the polarity ( ⁇ ) of the midpoint voltage is opposite to each other depending on the input direction of the radial load (whether it is the direction of the arrow ⁇ or the direction of the arrow ⁇ ), It is possible to determine in which direction the radial load is applied.
- the relationship between the midpoint voltage and the radial load or the transmission torque (the relationship between the radial load and the transmission torque, if necessary) is examined in advance, and the radial load is calculated from the midpoint voltage using these relationships. And determine the transmission torque.
- requires radial load and transmission torque is performed with the calculator which is not shown in figure.
- the radial load is applied to the core portion 312a (or 312b) provided at a part in the circumferential direction of the magnetostrictive yoke 302, the compressive stress acting on the core portion 312a (or 312b) is increased. it can. Therefore, the radial load and the transmission torque can be measured with high sensitivity. Further, the magnetostrictive yoke 302 does not need to be bonded to the outer ring 304, and the core portions 312a and 312b only need to be disposed in the circumferential position (direction) to which a radial load is applied. Even when used in high temperature and vibration environments, normal measurement functions can be maintained over a long period of time.
- the coils 303a and 303b are wound around the core portions 312a and 312b of the magnetostrictive yoke 302 so that the magnetostrictive yoke 302 and the coils 303a and 303b can be handled as a unit. In addition, parts management and assembly work can be facilitated.
- the magnetostrictive yoke 302 includes magnetic circuit portions 314a and 314b that are configured for the respective core portions 312a and 312b and are independent of each other.
- the radial load in the direction of the arrow ⁇ (or arrow ⁇ ) is changed based on the change in inductance of the coil 303a (or 303b) wound around the upper core portion 312a (or the lower core portion 312b). It can be measured without being substantially affected by the magnetic flux generated in the coil 303b (or 303a). Furthermore, based on the output of the temperature compensation circuit shown in FIG. 51 (bridge midpoint voltage), it is possible to measure the radial load and the transmission torque with reduced or eliminated errors due to temperature changes. Therefore, highly reliable measurement can be performed.
- rotation support apparatus of the 31st example of the embodiment can also be applied to a structure in which a stationary ring constituting a rolling bearing is an inner ring.
- an appropriate aspect can be employ
- the magnetostrictive member may be composed only of bearing steel or mechanical structural steel, or magnetostrictive such as pure Ni, Fe—Ni alloy, Fe—Co alloy, Fe—Al alloy, amorphous alloy, etc. It may be made of only a magnetic metal having a large constant.
- a magnetic metal having a large magnetostriction constant can be adhered and fixed to the surface of the column portion of the magnetostrictive member in the form of a film.
- the magnetic flux generating source penetrating the sensor may be a magnetized magnetostrictive member or a permanent magnet attached to the magnetostrictive member.
- a magnetic detecting element can be used as a sensor instead of a coil.
- a magnetic detection element instead of winding a coil around each core part (column part), a magnetic detection element can be attached to the side surface of each core part.
- a magnetic flux penetrating each core portion and each magnetic detection element is generated by magnetizing a magnetostrictive yoke (magnetostrictive member) or by attaching a permanent magnet to the magnetostrictive yoke. .
- the radial load or the like in the directions of arrows ⁇ and ⁇ can be measured based on the output signal of each magnetic detection element.
- the configuration of the temperature compensation circuit is shown in FIG.
- the configuration is not limited to the illustrated configuration, and an appropriate configuration can be adopted.
- the rotation support device of this example includes a rolling bearing 401, a strain generating member 402, a plurality of magnetostrictive materials 403 and 403, a coil 404, and a cover 405 that is a magnetic path member.
- the rolling bearing 401 is a radial deep groove ball bearing, and includes an outer ring 406 that is a stationary ring that does not rotate even when used, an inner ring 407 that is a rotating ring that rotates when used, and a plurality of balls 408 and 408 each of which is a rolling element. And a cage 409.
- Each ball 408, 408 is held between the outer ring raceway 410 formed on the inner peripheral surface of the outer ring 406 and the inner ring raceway 411 formed on the outer peripheral surface of the inner ring 407 while being held by the cage 409. It is provided freely.
- the strain-generating member 402 is made of a magnetic material in an annular shape, and is externally fitted and fixed to the outer ring 406, and generates strain according to the load applied to the rolling bearing 401.
- a strain generating member 402 includes a cylindrical portion 412, an inward flange portion 413 provided over the entire circumference at one axial end portion (the left end portion in FIGS. 54 to 55) of the inner peripheral surface of the cylindrical portion 412, and a cylindrical portion.
- a cross section provided over the entire circumference at each of a plurality of locations that are equidistant in the axial direction of the outer peripheral surface of the cylindrical portion 412 and an outward flange portion 414 provided over the entire circumferential end of the outer peripheral surface of the portion 412 Rectangular recesses 415 and 415.
- the strain generating member 402 is fitted in the outer ring 406 by tightly fitting the cylindrical part 412, and the inner ring 413 is abutted against the side surface of the outer ring 406 in the axial direction so that the outer ring 406 is positioned in the axial direction. It is fixed to 406.
- the concave grooves 415 and 415 are arranged at positions overlapping with the outer ring 406 in the radial direction.
- a soft magnetic material having a higher magnetic permeability than the materials constituting the outer ring 406 and the inner ring 407 of the rolling bearing 401 for example, specified in JIS.
- Steel materials such as S10C, which have a small amount of carbon, silicon steel, permalloy, permendur, soft ferrite, etc.) are used.
- Each of the magnetostrictive members 403 and 403 includes a magnetic material having a magnetostriction constant larger than the magnetic material constituting the strain generating member 402 (and a cover 405 described later) (for example, pure Ni, Fe—Ni alloy, Fe—Co alloy, Fe—Al alloy, amorphous alloy, etc.) and fixed to the inner surface of each of the grooves 415, 415 as a band-like film (for example, fixed as a film such as plating or sprayed coating).
- a magnetic material having a magnetostriction constant larger than the magnetic material constituting the strain generating member 402 (and a cover 405 described later) for example, pure Ni, Fe—Ni alloy, Fe—Co alloy, Fe—Al alloy, amorphous alloy, etc.
- the magnetostrictive members 403 and 403 are arranged so that the outer peripheral surface of the magnetostrictive members 403 and 403 is located radially inside the outer peripheral surface of the cylindrical portion 412, and the outer peripheral surfaces of the magnetostrictive members 403 and 403 do not contact the inner peripheral surface of the cover 405 Like.
- the magnetic material constituting each of the magnetostrictive materials 403 and 403 is desirably negative in magnetostriction constant. This is because when the magnetostriction constant is negative, the strength of the magnetic field increases due to the compressive stress, and the change signal can be increased.
- the magnetostrictive members 403 and 403 may be parts fixed by welding to the strain generating member 402 in a state in which the magnetostrictive members 403 and 403 are fitted into the concave grooves 415 and 415 without rattling.
- the coil 404 is wound around a portion adjacent to the outward flange portion 414 in the axial direction at one axial end portion of the cylindrical portion 412 constituting the strain-generating member 402.
- the cover 405 is made of a magnetic material in a cylindrical shape, and has a large-diameter recess 416 extending over the entire circumference at one axial end portion (the left end portion in FIGS. 54 to 55) of the inner peripheral surface.
- the cover 405 is fitted on the cylindrical portion 412 constituting the strain generating member 402 (a portion of the outer peripheral surface of the cylindrical portion 412 that is out of the concave grooves 415 and 415) by an interference fit, and one end surface in the axial direction is outwardly directed. By abutting against the side surface in the axial direction of the portion 414, it is fixed to the strain generating member 402 while being positioned in the axial direction.
- the cover 405 covers the surroundings of the concave grooves 415 and 415 provided with the magnetostrictive materials 403 and 403 and the coil 404.
- the coil 404 is disposed inside the large-diameter recess 416.
- a soft magnetic material is used as the magnetic material constituting the cover 405 in the same manner as the strain generating member 402.
- the inner ring 407 is externally fitted to a rotation shaft (rotation shaft constituting a transmission, rotation shaft constituting a differential gear, propeller shaft, drive shaft, etc.) constituting a power train of an automobile.
- the cover 405 and the outward flange 414 of the strain-generating member 402 are used in a state of being fitted inside the housing.
- a magnetic flux penetrating the coil 404 is generated by passing an alternating current through the coil 404.
- the magnetic flux generated by the coil 404 flows as an alternating magnetic flux in a closed magnetic path formed by the strain-generating member 402, the magnetostrictive members 403 and 403, and the cover 405.
- the load load of the rolling bearing 401 Based on detecting changes in the magnetic permeability of the magnetostrictive members 403 and 403 as changes in the inductance of the coil 404, the load load of the rolling bearing 401 or a physical quantity correlated with the load load (for example, the rotating shaft) ).
- the cylindrical portion 412 that constitutes the strain generating member 402, the magnetostrictive members 403 and 403, and the cover 405 are positioned between the outer peripheral surface of the outer ring 406 that constitutes the rolling bearing 401 and the inner peripheral surface of the housing. Is arranged. Therefore, for example, when a radial load in the direction indicated by the arrow ⁇ in FIGS. 54 and 56 is applied to the rolling bearing 401, a part in the circumferential direction of the cylindrical portion 412 constituting the strain generating member 402 (FIG. 54 and FIG. 54). The radial load is also applied to the upper part of FIG.
- the portion of the cylindrical portion 412 that is out of the concave grooves 415 and 415 in the circumferential direction is crushed elastically in the radial direction, so that the width of the concave grooves 415 and 415 is reduced.
- stress in the axial direction is applied to the magnetostrictive members 403 and 403. Due to this stress, the magnetic permeability of the magnetostrictive members 403 and 403 changes, and the inductance of the coil 404 changes accordingly.
- the inductance of the coil 404 changes according to the radial load applied to the rolling bearing 401.
- the magnetostrictive members 403 and 403 are fixed as films such as plating on the inner surfaces of the concave grooves 415 and 415 provided on the outer peripheral surface of the cylindrical portion 412 constituting the strain-generating member 402 (or as parts, It is welded and fixed in a state in which it is fitted inside the grooves 415 and 415 without rattling).
- the periphery of each of the concave grooves 415 and 415 is covered with a cover 405. For this reason, even when used in oil, high temperature, and vibration environment, the normal installation state of the magnetostrictive members 403 and 403 can be maintained over a long period of time, and normal measurement can be performed.
- the magnetic flux generated by passing an alternating current through the coil 404 flows in a closed magnetic path constituted by the strain-generating member 402, each of the magnetostrictive members 403 and 403, and the cover 405.
- the magnetic path is formed on the outer ring 406 and inner ring 407 side by using a soft magnetic material having a higher magnetic permeability than the material constituting the outer ring 406 and inner ring 407 of the rolling bearing 401 as the magnetic material constituting the strain generating member 402. I try not to turn it). For this reason, the value of the magnetic flux can be increased, and a highly reliable measurement can be performed accordingly.
- magnetic flux leakage to the surrounding space can be made small or zero, adverse effects on peripheral devices and the like can be suppressed or prevented.
- the strain generating member 402 and the cover 405 constituting the closed magnetic path are made of a soft magnetic material having a small hysteresis characteristic, the influence of this hysteresis characteristic can be suppressed and the linearity of the output can be improved. Therefore, highly accurate measurement can be performed. Moreover, since a general thing can be used as the rolling bearing 401 and the strain generating member 402, each magnetostrictive material 403,403, and the coil 404 can be handled as one body, parts management, assembly work, etc. can be facilitated. .
- the strain generating member 402a is provided with an inward flange portion 413a at a portion near one axial end of the inner peripheral surface of the cylindrical portion 412a, and an outward flange portion 414a at one axial end portion of the outer peripheral surface of the cylindrical portion 412a. Provided.
- one end portion in the axial direction of the strain generating member 402a (a portion protruding toward one end side in the axial direction from the inward flange portion 413a and having an L-shaped cross section composed of one end portion in the axial direction of the cylindrical portion 412a and the outward flange portion 414a).
- Cut portions 417 and 417 are provided at two positions on the opposite side in the radial direction.
- one end of the axial direction of the strain generating member 402a is divided into two in the circumferential direction, and the two parts having a semicircular arc shape when viewed from the axial direction are divided into a pair.
- Portions 418a and 418b are provided.
- coils 404a and 404b are wound around a semicircular arc around portions corresponding to one end in the axial direction of the cylindrical portion 412a among the divided portions 418a and 418b.
- the temperature includes a bridge composed of coils 404a and 404b (impedances R 2 and R 4 ) and two resistors 419a and 419b (impedances R 1 and R 3 ).
- a compensation circuit is configured.
- an oscillator 420 provided in the temperature compensation circuit applies an AC voltage V to both ends of the bridge, thereby passing an AC current through the coils 404a and 404b, thereby penetrating the coils 404a and 404b. Generate magnetic flux.
- each coil 404a, 404b The magnetic flux generated by each coil 404a, 404b is configured in each coil 404a, 404b (alternately in a closed magnetic circuit formed by the strain-generating member 402a, each magnetostrictive material 403, 403, and cover 405a). Flowing as.
- the impedances R 1 and R 3 of the resistors 419a and 419b constituting the temperature compensation circuit shown in FIG. 61 are radial to the rolling bearing 401 in relation to the impedances R 2 and R 4 of the coils 404a and 404b.
- the bridge In the neutral state where no load is applied, the bridge is initially set so that the midpoint voltage of the bridge (voltage between the points PQ) becomes zero. In order to perform this initial setting, at least one of the resistors 419a and 419b is made a variable resistor or offset error correction is performed as necessary.
- FIGS. 59 and 60 In the case of the rotation support device of this example having the above-described configuration, in FIGS. 59 and 60, a radial load in the direction indicated by the arrow ⁇ (or arrow ⁇ ) is applied to the rolling bearing 401 from a rotation shaft (not shown). Then, the circumferential portion of the cylindrical portion 412a constituting the strain generating member 402a ⁇ the portion constituting the closed magnetic circuit of the upper coil 404a (or the lower coil 404b) in FIGS. 59 and 60 ⁇ , The radial load is applied.
- each of the coils 404a and 404b changes when a radial load is applied, and also changes when a temperature change occurs.
- the change in impedance of each coil 404a, 404b due to the load of the radial load depends on the input direction of the radial load (whether the direction is the direction of arrow ⁇ or the direction of arrow ⁇ ). It occurs only in one of the coils. That is, when a radial load in the direction of arrow ⁇ (or arrow ⁇ ) is applied, only the impedance of the upper coil 404a (or the lower coil 404b) changes, and the lower coil 404b (or the upper coil 404b) The impedance of the coil 404a) does not change.
- the midpoint voltage (voltage between the points PQ) shown in FIG. 61 corresponding to the voltage difference between the terminals of the coils 404a and 404b is detected.
- Radial load and transmission torque are measured based on the voltage.
- the polarity ( ⁇ ) of the midpoint voltage is opposite to each other depending on the input direction of the radial load (whether it is the direction of the arrow ⁇ or the direction of the arrow ⁇ ). Which direction of radial load is applied can be determined.
- the relationship between the midpoint voltage and the radial load or transmission torque (relation between the radial load and transmission torque, if necessary) is examined in advance. Utilizing this, the radial load and transmission torque are obtained from the midpoint voltage.
- requires radial load and transmission torque is performed with the calculator which is not shown in figure.
- radial loads in different directions are separated from each other based on the change in inductance (impedance) of each coil 404a, 404b. It can be measured separately. Furthermore, since a closed magnetic circuit is formed for each of the coils 404a and 404b, radial loads in different directions can be measured without being substantially affected by magnetic fluxes generated by other coils. Further, in the case of this example, the radial load and the transmission torque in which the error due to the temperature change is reduced or eliminated can be measured based on the output of the temperature compensation circuit (bridge midpoint voltage) shown in FIG. Therefore, a highly reliable measurement can be performed accordingly. Other configurations and operations are the same as those in the thirty-second example of the above-described embodiment.
- the rotation support devices of the thirty-second to thirty-third examples of the embodiment can also be applied to a structure in which the stationary ring constituting the rolling bearing becomes an inner ring having an inner ring raceway on the outer peripheral surface.
- the number and arrangement of the grooves are determined by the load stress of the strain-generating member, It can be appropriately changed according to the material characteristics.
- the strain generating member it is possible to omit the strain generating member and to adopt a configuration in which a plurality of concave grooves for installing the magnetostrictive material are formed directly on the outer peripheral surface of the outer ring.
- an outward flange is integrally formed at one axial end of the outer peripheral surface of the outer ring.
- the coil is wound around a portion of the outer peripheral surface of the outer ring adjacent to the side surface of the outward flange portion, and the axial end surface of the cover fitted on the outer ring is brought into contact with the side surface of the outward flange portion.
- the outer ring, the magnetostrictive material, and the cover constitute a closed magnetic circuit.
- Experiment 1 the structure of the twelfth exemplary embodiment shown in FIG. 13 described above, present in an area 100mm 2 cleanliness (the surface of the magnetic steel constituting magnetostrictive effect portion (outer ring 3c), the square root of the area The number of non-metallic inclusions having a thickness of 5 ⁇ m or more) was examined on the influence on the output voltage of the coil 15b.
- the ratio of the concentrations of the three elements was set to be approximately the same as that of SUJ2 used as a material for a bearing ring of a general rolling bearing.
- “Counting method for non-metallic inclusions” A metal micrograph of a 1 mm ⁇ 1 mm region on the surface of the outer ring 3c (one side surface in the axial direction of the narrow portion 19) is binarized, and the area of each nonmetallic inclusion existing in the region is measured. The operation of counting non-metallic inclusions having a square root of 5 ⁇ m or more was performed in 100 regions.
- the total number of counts was the number of non-metallic inclusions having a square root of 5 ⁇ m or more existing in an area of 100 mm 2 on the surface of the outer ring 3c.
- the three elements oxygen, titanium contained in the magnetic steel constituting the magnetostrictive effect portion (outer ring 3c) are used. It was confirmed that the concentration of sulfur) may be oxygen: 20 ppm or less, titanium: 100 ppm or less, and sulfur: 0.05% or less. Further, it was confirmed that the concentration of the three elements may be oxygen: 15 ppm or less, titanium: 50 ppm or less, sulfur: 0.03% or less in order to reduce the number of the non-metallic inclusions to 500 or less. .
- the precipitation amount of carbide on the surface of the outer ring 3c was varied by carburizing treatment.
- the amount of precipitation was adjusted by adjusting the flow rate of propane gas during the carburizing process.
- “Measurement method of area ratio of carbide on the surface of the outer ring 3c” After the surface of the outer ring 3c ⁇ one side surface in the axial direction of the narrow portion 19 (the right side surface in Fig. 13) ⁇ is polished to a mirror surface, the metal structure is exposed with a corrosive liquid (picric acid alcohol), A 200 ⁇ m ⁇ 160 ⁇ m region of a metal micrograph was binarized, and the area ratio of carbides in that region was measured.
- the nitrogen concentration at which the area ratio is 1.0% is 0.2%. Therefore, from the result of Experiment 4, when the nitrogen concentration on the surface of the magnetostrictive effect portion (outer ring 3c) is 0.5% or less, highly accurate load measurement can be performed, and further, the nitrogen concentration is 0.2% or less. Then, it was confirmed that more accurate load measurement can be performed.
- Magnetostrictive effect material 10f The amorphous magnetic thin film, which is the magnetostrictive effect material 10f, was fixed to (attached to) the attachment surface (one side surface in the axial direction of the narrow portion 19). “Measurement of non-metallic inclusions” Before fixing the magnetostrictive effect material 10f to the mounting surface (one side surface in the axial direction of the narrow portion 19), the mounting surface is polished with diamond powder so that the nonmetallic inclusions can be easily observed. The maximum value of ⁇ area of non-metallic inclusions present was measured.
- the surface roughness was adjusted using # 120 to # 1500 sand paper.
- the maximum height Rz of the mounting surface was measured using a foam holysurf manufactured by Taylor Hobson.
- the value of the maximum height Rz of the mounting surface was measured at four points for each sample, and the average value was taken. "Evaluation method of output voltage of coil 15b" Similar to Experiment 6.
- the magnetostrictive effect portion (inner ring 118) is configured for the structure of the first modification of the 18th example of the embodiment shown in FIG. 26 (however, the sensor 104 is replaced with the sensor 104a of FIG. 24).
- the effect of the cleanliness of the magnetic steel (the number of non-metallic inclusions with a square root of 5 ⁇ m or more present in the surface area of 100 mm 2 ) on the output voltage of the coil 115 was examined.
- the ratio of the concentrations of the three elements was set to be approximately the same as that of SUJ2 used as a material for a bearing ring of a general rolling bearing.
- “Counting method for non-metallic inclusions” A metal micrograph of a 1 mm ⁇ 1 mm region on the surface of the inner ring 118 is binarized, the area of each nonmetallic inclusion existing in the region is measured, and a nonmetallic inclusion having a square root of 5 ⁇ m or more is measured. The counting operation was performed in 100 areas. The total number of counts was the number of non-metallic inclusions present in the surface area of 100 mm 2 of the inner ring 118 and having a square root of 5 ⁇ m or more.
- “Evaluation method of output voltage of coil 115” The output voltage of the coil 115 is measured while repeatedly applying a torque of ⁇ 1000 to 1000 Nm to the rotating shaft 102b to which the inner ring 118 is externally fitted and fixed, and the standard deviation ⁇ of the deviation from the least square approximation line is measured Asked. A value of 3 ⁇ ⁇ was evaluated as an error in the output voltage of the coil 15.
- the three elements oxygen, titanium contained in the magnetic steel constituting the magnetostrictive effect portion (inner ring 118) are used. It was confirmed that the concentration of sulfur) may be oxygen: 20 ppm or less, titanium: 100 ppm or less, and sulfur: 0.05% or less. Further, it was confirmed that the concentration of the three elements may be oxygen: 15 ppm or less, titanium: 50 ppm or less, sulfur: 0.03% or less in order to reduce the number of the non-metallic inclusions to 500 or less. .
- the surface roughness (arithmetic average roughness Ra) of the outer peripheral surface of the inner ring 118 in the portion facing the detection portion (coil 115) of the sensor 104a in the radial direction is varied for each of the plurality of samples.
- the surface roughness was adjusted using # 120 to # 1500 sand paper. “Evaluation method of output voltage of coil 115” Similar to Experiment 8.
- the precipitation amount of carbide on the surface of the inner ring 118 was varied by carburizing treatment. The amount of precipitation was adjusted by adjusting the flow rate of propane gas during the carburizing process.
- “Measurement method of carbide area ratio on surface of inner ring 118” After polishing the surface of the inner ring 118 ⁇ one end portion in the axial direction of the outer peripheral surface (the right end portion in Fig. 26) ⁇ to a mirror surface, the metal structure is revealed with a corrosive liquid (picric acid alcohol), and then 200 ⁇ m on the surface. A metal micrograph of a region of ⁇ 160 ⁇ m was binarized, and the area ratio of carbides in that region was measured.
- “Evaluation method of output voltage of coil 115” The output voltage of the coil 115 is measured while repeatedly applying a torque of ⁇ 1000 to 1000 Nm to the rotating shaft 102b to which the inner ring 118 is externally fitted and fixed, and the standard deviation ⁇ of the deviation from the least square approximation line is measured. Asked. A value of 3 ⁇ ⁇ was evaluated as an error in the output voltage of the coil 115.
- the nitrogen concentration at which the area ratio of nitride is 3.0% on the surface of the bearing ring is 0.5%, and the area concerned The nitrogen concentration at which the rate is 1.0% is 0.2%. Therefore, from the results of Experiment 11, if the nitrogen concentration on the surface of the magnetostrictive effect portion (inner ring 118) is 0.5% or less, highly accurate torque measurement can be performed, and the nitrogen concentration is 0.2% or less. If so, it was confirmed that more accurate torque measurement could be performed.
- Magnetostrictive film 203a An amorphous magnetic thin film, which is the magnetostrictive film 203a, was fixed to (attached to) the mounting surface. “Measurement of non-metallic inclusions” Before fixing the magnetostrictive film 203a to the mounting surface, the maximum value of ⁇ area of the nonmetallic inclusions existing on the mounting surface in a state where the mounting surface is polished with diamond powder to make it easy to observe the nonmetallic inclusions. was measured.
- “Evaluation method of output voltage of coil 216” The output voltage of the coil 216 is measured while repeatedly applying a torque of ⁇ 1000 to 1000 Nm to the rotating shaft 202a on which the inner ring 217 is externally fitted and fixed, and the standard deviation ⁇ of the deviation from the least square approximation line is measured. Asked. Then, the value of 3 ⁇ ⁇ was evaluated as an error in the output voltage of the coil 216.
- Results of Experiment 13 are shown in FIG. From this result, it can be confirmed that the error of the output voltage of the coil 216 can be suppressed small (highly accurate torque measurement can be performed) if the maximum value of the ⁇ area of the nonmetallic inclusion existing on the mounting surface is 80 ⁇ m or less. It was. Furthermore, when the maximum value is 40 ⁇ m or less, it was confirmed that the error can be suppressed to a smaller value (a more accurate torque measurement can be performed).
- the surface roughness was adjusted using # 120 to # 1500 sand paper.
- the maximum height Rz of the mounting surface was measured using a foam holysurf manufactured by Taylor Hobson.
- the value of the maximum height Rz of the mounting surface was measured at four points for each sample, and the average value was taken. “Evaluation method of output voltage of coil 216” Similar to Experiment 13.
- the target device is not particularly limited.
- automatic transmission (AT), belt type continuously variable transmission, toroidal type continuously variable transmission, automatic manual transmission (AMT), double clutch transmission (DCT), etc.
- AMT automatic manual transmission
- DCT double clutch transmission
- FF driving method
- FR FR, etc.
- the rotation support device of the present invention is not limited to the rotation shaft constituting the power train of the automobile, but, for example, the rotation shaft of the windmill (main shaft, the rotation shaft of the speed increasing device), the roll neck of the rolling mill, Axis (axle, rotation axis of reducer), rotation axis of machine tool (main axis, rotation axis of feed system), construction machine, agricultural machine, household electrical appliance, rotation axis of motor, etc. It can be used by incorporating it in the supporting part.
- the rolling bearing constituting the rotation support device is not limited to the radial rolling bearing but may be a thrust rolling bearing.
- the rolling bearing is not limited to a deep groove ball bearing, and various types such as an angular ball bearing, a tapered roller bearing, a cylindrical roller bearing, a needle bearing, and a self-aligning roller bearing can be employed. Furthermore, the rolling bearing is not limited to a single row rolling bearing, and may be a double row rolling bearing.
- the sensor that constitutes the rotation support device may be any sensor that changes its output signal in accordance with the magnetic flux that passes through its own detection unit and changes according to the magnetic permeability of the magnetostriction effect unit. It is not limited.
- the magnetic flux generation source may be a magnetized magnetostrictive effect portion, a coil constituting the sensor, or a permanent magnet incorporated in the sensor.
- the magnetization direction of the magnetostrictive effect portion may be any direction such as an axial direction, a radial direction, and a circumferential direction.
- the material constituting the magnetostrictive effect portion may be any material as long as it exhibits the inverse magnetostrictive effect to the extent that does not hinder the detection of torque, and is not limited to those specifically exemplified in this specification. Absent.
- structures other than each embodiment mentioned above can also be employ
- Japanese Patent Application 2014-135908 filed on July 1, 2014, Japanese Patent Application 2014-135909 filed on July 1, 2014, Japanese Patent Application 2014-135910 filed on July 1, 2014, August 20, 2014 Japanese Patent Application 2014-167338, Japanese Patent Application 2014-167791 filed on August 20, 2014, Japanese Patent Application 2014-167792 filed on August 20, 2014, Japanese Patent Application filed on August 26, 2014 Japanese patents filed on September 16, 2014 and 2014-171105 Is based on 2014-187231, the contents of which are incorporated herein by reference.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Rolling Contact Bearings (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
L'invention concerne un dispositif support rotatif comprenant un palier à éléments roulants et un capteur. Le palier à éléments roulants comprend un corps fixe qui ne tourne pas pendant l'utilisation et une pluralité d'éléments roulants qui roulent le long d'une piste formée dans une partie du corps fixe. Au moins une partie du corps fixe est une section à effet magnétostrictif dont la perméabilité magnétique varie en fonction de la charge appliquée. Le capteur est supporté, positionné à proximité de la section à effet magnétostrictif, par une pièce qui ne tourne pas pendant l'utilisation. Le capteur fait varier un signal de sortie en fonction du flux magnétique qui passe à travers une unité de détection dans le capteur et le fait varier en fonction de la perméabilité magnétique de la section à effet magnétostrictif.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016529420A JPWO2015194609A1 (ja) | 2014-06-17 | 2015-06-17 | 回転支持装置 |
Applications Claiming Priority (22)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-124709 | 2014-06-17 | ||
| JP2014124709 | 2014-06-17 | ||
| JP2014-124710 | 2014-06-17 | ||
| JP2014124710 | 2014-06-17 | ||
| JP2014-124711 | 2014-06-17 | ||
| JP2014124711 | 2014-06-17 | ||
| JP2014-135908 | 2014-07-01 | ||
| JP2014135910 | 2014-07-01 | ||
| JP2014135909 | 2014-07-01 | ||
| JP2014135908 | 2014-07-01 | ||
| JP2014-135910 | 2014-07-01 | ||
| JP2014-135909 | 2014-07-01 | ||
| JP2014-167791 | 2014-08-20 | ||
| JP2014-167792 | 2014-08-20 | ||
| JP2014167338 | 2014-08-20 | ||
| JP2014167791 | 2014-08-20 | ||
| JP2014-167338 | 2014-08-20 | ||
| JP2014167792 | 2014-08-20 | ||
| JP2014171105 | 2014-08-26 | ||
| JP2014-171105 | 2014-08-26 | ||
| JP2014-187231 | 2014-09-16 | ||
| JP2014187231 | 2014-09-16 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015194609A1 true WO2015194609A1 (fr) | 2015-12-23 |
Family
ID=54935589
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/067525 WO2015194609A1 (fr) | 2014-06-17 | 2015-06-17 | Dispositif support rotatif |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2015194609A1 (fr) |
| WO (1) | WO2015194609A1 (fr) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016161306A (ja) * | 2015-02-27 | 2016-09-05 | 日立金属株式会社 | トルク検出装置、及びトルク検出方法 |
| WO2018019322A1 (fr) * | 2016-07-25 | 2018-02-01 | Schaeffler Technologies AG & Co. KG | Ensemble palier doté d'un système de mesure servant à mesurer une force et/ou un couple |
| WO2021013504A1 (fr) | 2019-07-24 | 2021-01-28 | Atlas Copco Industrial Technique Ab | Partie de fixation d'un outil électrique |
| WO2021063436A1 (fr) * | 2019-09-30 | 2021-04-08 | Schaeffler Technologies AG & Co. KG | Palier à roulement équipé de moyens d'amortissement ou d'élimination de signaux de bruit haute fréquence ; et agencement à entraînement électrique |
| US20230313838A1 (en) * | 2020-07-31 | 2023-10-05 | Minebea Mitsumi Inc. | Rolling bearing holder unit |
| WO2024202665A1 (fr) * | 2023-03-24 | 2024-10-03 | 日本精工株式会社 | Capteur de couple magnétostrictif |
| JP7593016B2 (ja) | 2020-09-16 | 2024-12-03 | 日本精工株式会社 | トルクセンサ付転がり軸受 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03209016A (ja) * | 1989-12-04 | 1991-09-12 | Skf Nova Ab | ハブ軸受ユニット |
| JP2002250662A (ja) * | 2000-12-22 | 2002-09-06 | Tdk Corp | トルクセンサおよびその製造方法 |
| JP2004332796A (ja) * | 2003-05-06 | 2004-11-25 | Ntn Corp | 荷重センサ内蔵車輪用軸受 |
| JP2005048823A (ja) * | 2003-07-31 | 2005-02-24 | Koyo Seiko Co Ltd | センサ付きハブユニット |
| JP2005154784A (ja) * | 2002-11-12 | 2005-06-16 | Daido Steel Co Ltd | 耐食性に優れた軸受鋼 |
| JP2005180688A (ja) * | 2003-11-26 | 2005-07-07 | Ntn Corp | 車輪用軸受装置 |
| JP2006170352A (ja) * | 2004-12-17 | 2006-06-29 | Ntn Corp | スラスト軸受 |
| JP2006308019A (ja) * | 2005-04-28 | 2006-11-09 | Nsk Ltd | 転がり軸受 |
| JP2008281158A (ja) * | 2007-05-14 | 2008-11-20 | Ntn Corp | 軸受装置および軸受予圧検出装置 |
| JP2009191942A (ja) * | 2008-02-14 | 2009-08-27 | Nsk Ltd | 転がり軸受 |
| JP2011225928A (ja) * | 2010-04-19 | 2011-11-10 | Nsk Ltd | ピニオンシャフト及びピニオンシャフトの製造方法 |
-
2015
- 2015-06-17 WO PCT/JP2015/067525 patent/WO2015194609A1/fr active Application Filing
- 2015-06-17 JP JP2016529420A patent/JPWO2015194609A1/ja active Pending
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03209016A (ja) * | 1989-12-04 | 1991-09-12 | Skf Nova Ab | ハブ軸受ユニット |
| JP2002250662A (ja) * | 2000-12-22 | 2002-09-06 | Tdk Corp | トルクセンサおよびその製造方法 |
| JP2005154784A (ja) * | 2002-11-12 | 2005-06-16 | Daido Steel Co Ltd | 耐食性に優れた軸受鋼 |
| JP2004332796A (ja) * | 2003-05-06 | 2004-11-25 | Ntn Corp | 荷重センサ内蔵車輪用軸受 |
| JP2005048823A (ja) * | 2003-07-31 | 2005-02-24 | Koyo Seiko Co Ltd | センサ付きハブユニット |
| JP2005180688A (ja) * | 2003-11-26 | 2005-07-07 | Ntn Corp | 車輪用軸受装置 |
| JP2006170352A (ja) * | 2004-12-17 | 2006-06-29 | Ntn Corp | スラスト軸受 |
| JP2006308019A (ja) * | 2005-04-28 | 2006-11-09 | Nsk Ltd | 転がり軸受 |
| JP2008281158A (ja) * | 2007-05-14 | 2008-11-20 | Ntn Corp | 軸受装置および軸受予圧検出装置 |
| JP2009191942A (ja) * | 2008-02-14 | 2009-08-27 | Nsk Ltd | 転がり軸受 |
| JP2011225928A (ja) * | 2010-04-19 | 2011-11-10 | Nsk Ltd | ピニオンシャフト及びピニオンシャフトの製造方法 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016161306A (ja) * | 2015-02-27 | 2016-09-05 | 日立金属株式会社 | トルク検出装置、及びトルク検出方法 |
| WO2018019322A1 (fr) * | 2016-07-25 | 2018-02-01 | Schaeffler Technologies AG & Co. KG | Ensemble palier doté d'un système de mesure servant à mesurer une force et/ou un couple |
| WO2021013504A1 (fr) | 2019-07-24 | 2021-01-28 | Atlas Copco Industrial Technique Ab | Partie de fixation d'un outil électrique |
| EP4003651B1 (fr) | 2019-07-24 | 2023-09-06 | Atlas Copco Industrial Technique AB | Partie de fixation d'un outil électrique |
| WO2021063436A1 (fr) * | 2019-09-30 | 2021-04-08 | Schaeffler Technologies AG & Co. KG | Palier à roulement équipé de moyens d'amortissement ou d'élimination de signaux de bruit haute fréquence ; et agencement à entraînement électrique |
| US20230313838A1 (en) * | 2020-07-31 | 2023-10-05 | Minebea Mitsumi Inc. | Rolling bearing holder unit |
| US12129888B2 (en) * | 2020-07-31 | 2024-10-29 | Minebea Mitsumi Inc. | Rolling bearing holder unit |
| JP7593016B2 (ja) | 2020-09-16 | 2024-12-03 | 日本精工株式会社 | トルクセンサ付転がり軸受 |
| WO2024202665A1 (fr) * | 2023-03-24 | 2024-10-03 | 日本精工株式会社 | Capteur de couple magnétostrictif |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2015194609A1 (ja) | 2017-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2015194609A1 (fr) | Dispositif support rotatif | |
| US7584672B2 (en) | Magnetostrictive torque sensor | |
| US20170254710A1 (en) | Torque sensor device | |
| WO2014207953A1 (fr) | Dispositif de transmission de rotation | |
| JP2008256415A (ja) | 磁気センサ装置 | |
| WO2017051836A1 (fr) | Dispositif de palier pour roue de véhicule | |
| JP4910535B2 (ja) | 磁歪リング式トルクセンサ | |
| US20160195442A1 (en) | Torque measurement device-equipped rotation transmission apparatus | |
| JP2016105070A (ja) | トルク測定装置付回転伝達装置 | |
| WO2022059295A1 (fr) | Dispositif de mesure de couple | |
| JP7067297B2 (ja) | トルク測定装置 | |
| JP2016136117A (ja) | トルク測定装置 | |
| JP2022181967A (ja) | トルク測定装置 | |
| JP2006046987A (ja) | トルクセンサ及びその製造方法 | |
| CN116097075A (zh) | 转矩测量装置 | |
| JP7593016B2 (ja) | トルクセンサ付転がり軸受 | |
| EP4488642A1 (fr) | Dispositif de mesure de couple | |
| EP4488644A1 (fr) | Dispositif de mesure de couple | |
| JP2023127316A (ja) | トルク測定装置 | |
| JP4029785B2 (ja) | センサ付き転がり軸受ユニット | |
| JP2015090313A (ja) | トルク測定装置付回転伝達装置 | |
| WO2004085972A1 (fr) | Unite de palier roulant a codeur et procede de production correspondant | |
| JP2006090958A (ja) | センサ装置およびセンサ付き転がり軸受ユニット | |
| JP2008025766A (ja) | 円錐ころ軸受装置 | |
| JP6956576B2 (ja) | トルク負荷部材およびトルク伝達装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15809011 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2016529420 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15809011 Country of ref document: EP Kind code of ref document: A1 |