WO2015174469A1 - 作業車両 - Google Patents
作業車両 Download PDFInfo
- Publication number
- WO2015174469A1 WO2015174469A1 PCT/JP2015/063825 JP2015063825W WO2015174469A1 WO 2015174469 A1 WO2015174469 A1 WO 2015174469A1 JP 2015063825 W JP2015063825 W JP 2015063825W WO 2015174469 A1 WO2015174469 A1 WO 2015174469A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- detent
- arm
- raising
- lowering
- end position
- Prior art date
Links
Images







Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/34—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with bucket-arms, i.e. a pair of arms, e.g. manufacturing processes, form, geometry, material of bucket-arms directly pivoted on the frames of tractors or self-propelled machines
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/427—Drives for dippers, buckets, dipper-arms or bucket-arms with mechanical drives
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/431—Control of dipper or bucket position; Control of sequence of drive operations for bucket-arms, front-end loaders, dumpers or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
- E02F9/2012—Setting the functions of the control levers, e.g. changing assigned functions among operations levers, setting functions dependent on the operator or seat orientation
Definitions
- the present invention relates to a work vehicle including an operation lever having a detent function.
- the work vehicle described in Patent Document 1 is a detent that holds an operation lever at an operation position when an operation lever that operates lifting and lowering of a lift arm is operated to a predetermined operation position (upward operation end position and lowering operation end position). It has a function.
- a detent function for example, when traveling with the lift arm raised, by detenting (holding) the lift arm at the lifting operation end position, both lift arm lifting operation and traveling operation are not necessarily performed simultaneously. There is no need to do so, and it is possible to concentrate on driving operations.
- the detent function is automatically canceled when the lift arm angle exceeds a predetermined upper limit angle.
- the operation lever is provided with a spring or the like for holding the operation lever in the neutral position, and when the detent at the raising operation end position is released, the operation lever is returned to the neutral position direction by the force of the spring or the like.
- the operation lever may move to the vicinity of the opposite operation end (lower operation end position) without stopping at the neutral position.
- the operation lever is detented to the lower operation end position by the detent function on the lower side, and the lift arm lowering operation opposite to the operator's intention is performed. Therefore, the operator feels uncomfortable and the operability of the work vehicle is impaired.
- the work vehicle includes a lift arm coupled to the front portion of the vehicle body of the work vehicle so as to be pivotable in the vertical direction, and the lift operation end position and the lift operation end position.
- An operating lever for operating the lift arm to be raised and lowered a raising detent mechanism having a holding function for holding the operating lever operated at the raising operation end position at the raising operation end position, and a lowering operation end
- a detent mechanism having a holding function for holding the operation lever operated to a position at the lowering operation end position, and when the lift arm angle exceeds a predetermined upper limit, the holding function of the raising detent mechanism and the lowering detent mechanism. The holding function of is released.
- the arm angle sensor that detects the angle of the lift arm, and when the angle detected by the arm angle sensor exceeds a predetermined upper limit, It is preferable to include a control unit that releases the holding function and the holding function of the lowering detent mechanism for a first predetermined time and operates the holding function of the lowering detent mechanism again after the first predetermined time has elapsed.
- the control unit when the angle detected by the arm angle sensor falls below a predetermined lower limit, the control unit holds the lifting detent mechanism and the lowering detent mechanism.
- the raising detent mechanism has the raising detent coil that holds the operation lever at the raising operation end position by magnetic force, and the lowering detent mechanism is the operation lever. If the lift arm angle is below the predetermined upper limit, the lift detent coil and the lower detent coil are energized, and the lift arm angle is the predetermined upper limit. It is preferable to provide a detent control circuit that cuts off the energization of the raising detent coil and the lowering detent coil when exceeding.
- the detent control circuit is turned on when it falls below the predetermined upper limit, and is turned off when the predetermined upper limit is exceeded, and the proximity switch is turned on and off. It is preferable to provide a relay that controls the energization of the raising detent coil and the lowering detent coil in conjunction with each other.
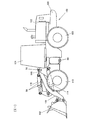
- FIG. 1 is a diagram showing an embodiment of a work vehicle according to the present invention, and is a side view of a wheel loader.
- FIG. 2 is a schematic diagram showing an operation member arranged in the cab 121 of the wheel loader 100.
- FIG. 3 is a diagram illustrating a working hydraulic circuit of the wheel loader 100.
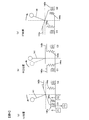
- FIG. 4 is a diagram for explaining the detent mechanisms 141a and 141b using the detent coils C1 and C2.
- FIG. 5 is a block diagram of a control system related to energization control of the detent coils C1 and C2.
- FIG. 6 is a flowchart for explaining energization control of the detent coils C1 and C2 in the control unit 10.
- FIG. 1 is a diagram showing an embodiment of a work vehicle according to the present invention, and is a side view of a wheel loader.
- FIG. 2 is a schematic diagram showing an operation member arranged in the cab 121 of the wheel loader 100.
- FIG. 1 is a diagram showing an embodiment of a work vehicle according to the present invention, and is a side view of a wheel loader.
- the wheel loader 100 includes a front vehicle body 110 having a lift arm 111, a bucket 112, tires 113, and the like, and a rear vehicle body 120 having a driver's cab 121, an engine compartment 122, tires 123, and the like.
- a lift arm (hereinafter simply referred to as an arm) 111 is attached to the front vehicle body 110 so as to be rotatable in the vertical direction, and is driven to rotate by driving of an arm cylinder 114.
- the bucket 112 is attached to the front end of the arm 111 so as to be rotatable in the forward / backward tilt direction (vertical direction) with respect to the arm 111, and is driven to rotate by driving the bucket cylinder 115.
- the front vehicle body 110 and the rear vehicle body 120 are rotatably connected to each other by a center pin 101, and the front vehicle body 110 is refracted left and right with respect to the rear vehicle body 120 by expansion and contraction of a steering cylinder (not shown).
- An arm angle sensor 56 that detects a rotation angle of the arm 111 with respect to the front vehicle body 110 is provided in the rotation portion of the arm 111, and a bucket cylinder that represents the rotation angle of the bucket 112 with respect to the arm 111 is provided in the bucket cylinder 115.
- a stroke amount detection device 58 for detecting 115 stroke amounts is provided.
- FIG. 2 is a schematic diagram showing an operation member arranged in the cab 121 of the wheel loader 100.
- a steering wheel 191 for a driver to steer the wheel loader 100 an accelerator pedal 192, a pair of brake pedals 193 interlocking with left and right, and an arm 111 are rotated upward or downward.
- the rotation of the bucket 112 in the backward tilt direction is also referred to as the bucket 112 being tilted.
- Turning the bucket 112 in the forward tilt direction is also referred to as dumping the bucket 112.
- FIG. 3 is a diagram illustrating a working hydraulic circuit of the wheel loader 100, and includes a hydraulic circuit related to the arm 111 and a hydraulic circuit related to the bucket 112.
- the hydraulic pressure reaction force F1 due to the pilot pressure, the repulsive force F2 of the spring 144b, and the electromagnetic attraction force F3 due to the detent mechanism 141b act on the arm operation lever 141, and the magnetic force is set such that F3> F1 + F2. Has been.
- the arm operation lever 141 when the arm operation lever 141 is held at the raising operation end position (U) as shown in FIG. 4A, when the detent coil C1 is de-energized and released, the arm operation lever 141 is released. 141 moves beyond the neutral position to near the lower operation end position (F). At this time, since the detent coil C2 is energized, the attracted portion 143b is attracted and held by the magnetic force of the detent coil C2. As a result, the arm control valve 41 is switched to the float position (Fv), and the arm 111 falls freely.
- step S10 it is determined whether or not the arm angle ⁇ is within a predetermined range ( ⁇ (U) ⁇ ⁇ ⁇ ⁇ (F)).
- the angle ⁇ (U) is the predetermined upper limit value described above
- the angle ⁇ (F) is the predetermined lower limit value described above. If it is determined in step S10 that it is outside the predetermined range, the processing in FIG. 6 is terminated.
- step S40 energization of the detent coils C1 and C2 is interrupted.
- step S50 it is determined whether or not a predetermined time ⁇ t has elapsed since the energization interruption in step S40.
- the predetermined time ⁇ t is opposite to the time from when the energization of the detent coils C1 and C2 is interrupted until the arm operation lever 141 returns to the neutral position, and the swing width centered on the neutral position of the arm operation lever 141. It is set to a time until it becomes small enough not to be detented at the operation end position on the side.
- step S70 the energization of the detent coils C1 and C2 is interrupted.
- step S80 it is determined whether or not a predetermined time ⁇ t has elapsed since the energization was cut off. If it is determined in step S80 that the predetermined time ⁇ t has elapsed since the energization interruption, the process proceeds to step S90, the energization to the detent coil C1 is resumed, and the process of FIG.
- FIG. 9 is a flowchart showing the control in that case, and this control is repeatedly executed at predetermined time intervals.
- both the detent coils C1 and C2 are deenergized. Therefore, when the detent is released, the arm operation lever 141 is lowered on the opposite side. It can be prevented from being held at the operation end position.
- the arm operation lever including the raising detent mechanism 141a and the lowering detent mechanism 141b has been described as an example.
- the work vehicle configured to include the detent mechanism at both operation end positions of the operation lever. If so, the present invention can be similarly applied.
- the arm operation lever 141 is a grip type provided with a grip, there is a tendency that the deflection from the neutral point to the opposite side when the detent is released increases.
- a switch one or more related to an operation different from the arm operation may be provided in the grip portion, and in such a case, the deflection to the opposite side due to inertia further increases.
- a switch for example, there is a forward / reverse switching switch for switching the traveling direction of the work vehicle.
- the present invention can also be applied to an operation lever in which an arm operation is performed by tilting the operation lever back and forth, and a bucket operation is performed by tilting the operation lever left and right.
- the present invention is applied both when the arm angle ⁇ exceeds the predetermined upper limit value ⁇ (U) and when it falls below the predetermined lower limit value ⁇ (F) as shown in FIG. However, it may be applied to only one of them.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Operation Control Of Excavators (AREA)
- Control And Safety Of Cranes (AREA)
- Lifting Devices For Agricultural Implements (AREA)
Abstract
Description
本発明の第2の態様によると、第1の態様の作業車両において、リフトアームの角度を検出するアーム角度センサと、アーム角度センサで検出された角度が所定上限を超えると、上げデテント機構の保持機能および下げデテント機構の保持機能を第1の所定時間だけ解除し、第1の所定時間が経過した後に下げデテント機構の保持機能を再び動作させる制御部と、を備えることが好ましい。
本発明の第3の態様によると、第2の態様の作業車両において、制御部は、アーム角度センサで検出された角度が所定下限を下回ると、上げデテント機構の保持機能および下げデテント機構の保持機能を第2の所定時間だけ解除し、第2の所定時間が経過した後に上げデテント機構の保持機能を再び動作させることが好ましい。
本発明の第4の態様によると、第1の態様の作業車両において、上げデテント機構は、操作レバーを磁力により上げ操作端位置に保持する上げデテントコイルを有し、下げデテント機構は、操作レバーを磁力により下げ操作端位置に保持する下げデテントコイルを有し、リフトアームの角度が所定上限を下回っている場合には上げデテントコイルおよび下げデテントコイルを通電状態とし、リフトアームの角度が所定上限を超えると上げデテントコイルおよび下げデテントコイルの通電を遮断するデテント制御回路を備えることが好ましい。
本発明の第5の態様によると、第4の態様の作業車両において、デテント制御回路は、所定上限を下回っているとオンし、所定上限を超えるとオフする近接スイッチと、近接スイッチのオンオフに連動して上げデテントコイルおよび下げデテントコイルの通電を制御するリレーと、を備えることが好ましい。
折する。
なお、上述した実施の形態では、コントロールユニット10によってデテントコイルC1,C2の通電を図6の様に制御することで、アーム操作レバー141が反対側の操作端位置に保持されてしまうのを防止した。しかし、コントロールユニット10により通電を制御する代わりに、デテントコイルC1,C2の通電回路を図7のように構成した場合でも、同様の作用効果が得られる。
日本国特許出願2014年第100742号(2014年5月14日出願)
Claims (5)
- 作業車両(100)の車両本体(110,120)の前部に、上下方向に回動可能に連結されたリフトアーム(111)と、
上げ操作端位置(U)と下げ操作端位置(F)との間で操作可能であって、前記リフトアーム(111)の上げ下げを操作する操作レバー(141)と、
前記上げ操作端位置(U)に操作された前記操作レバー(141)を、該上げ操作端位置(U)に保持する保持機能を有する上げデテント機構(141a)と、
前記下げ操作端位置(F)に操作された前記操作レバー(141)を、該下げ操作端位置(F)に保持する保持機能を有する下げデテント機構(141b)と、を備え、
前記リフトアーム(111)の角度が所定上限を超えると、前記上げデテント機構(141a)の保持機能および前記下げデテント機構(141b)の保持機能が解除される作業車両。 - 請求項1に記載の作業車両において、
前記リフトアーム(111)の角度を検出するアーム角度センサ(56)と、
前記アーム角度センサ(56)で検出された角度が所定上限(α(U))を超えると、前記上げデテント機構(141a)の保持機能および前記下げデテント機構(141b)の保持機能を第1の所定時間(Δt)だけ解除し、前記第1の所定時間(Δt)が経過した後に前記下げデテント機構(141b)の保持機能を再び動作させる制御部(10)と、を備える作業車両。 - 請求項2に記載の作業車両において、
前記制御部(10)は、
前記アーム角度センサ(56)で検出された角度が所定下限(α(F))を下回ると、前記上げデテント機構(141a)の保持機能および前記下げデテント機構(141b)の保持機能を第2の所定時間(Δt)だけ解除し、前記第2の所定時間(Δt)が経過した後に前記上げデテント機構(141a)の保持機能を再び動作させる作業車両。 - 請求項1に記載の作業車両において、
前記上げデテント機構(141a)は、前記操作レバー(141)を磁力により前記上げ操作端位置(U)に保持する上げデテントコイル(C1)を有し、
前記下げデテント機構(141b)は、前記操作レバー(141)を磁力により前記下げ操作端位置(F)に保持する下げデテントコイル(C2)を有し、
前記リフトアーム(111)の角度が前記所定上限(α(U))を下回っている場合には前記上げデテントコイル(C1)および前記下げデテントコイル(C2)を通電状態とし、前記リフトアーム(111)の角度が前記所定上限(α(U))を超えると前記上げデテントコイル(C1)および前記下げデテントコイル(C2)の通電を遮断するデテント制御回路(10)を備える作業車両。 - 請求項4に記載の作業車両において、
前記デテント制御回路(10)は、
前記所定上限(α(U))を下回っているとオンし、前記所定上限(α(U))を超えるとオフする近接スイッチ(201)と、
前記近接スイッチ(201)のオンオフに連動して前記上げデテントコイル(C1)および前記下げデテントコイル(C2)の通電を制御するリレー(200)と、を備える作業車両。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/122,208 US10358794B2 (en) | 2014-05-14 | 2015-05-13 | Work vehicle |
| CN201580011784.0A CN106062284B (zh) | 2014-05-14 | 2015-05-13 | 作业车辆 |
| EP15791915.0A EP3144429B1 (en) | 2014-05-14 | 2015-05-13 | Working vehicle |
| KR1020167023944A KR101829789B1 (ko) | 2014-05-14 | 2015-05-13 | 작업 차량 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014100742A JP6309817B2 (ja) | 2014-05-14 | 2014-05-14 | 作業車両 |
| JP2014-100742 | 2014-05-14 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015174469A1 true WO2015174469A1 (ja) | 2015-11-19 |
Family
ID=54480006
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/063825 WO2015174469A1 (ja) | 2014-05-14 | 2015-05-13 | 作業車両 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10358794B2 (ja) |
| EP (1) | EP3144429B1 (ja) |
| JP (1) | JP6309817B2 (ja) |
| KR (1) | KR101829789B1 (ja) |
| CN (1) | CN106062284B (ja) |
| WO (1) | WO2015174469A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6791827B2 (ja) | 2017-09-29 | 2020-11-25 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
| AU2020270518A1 (en) * | 2019-12-02 | 2021-06-17 | Caterpillar Global Mining Equipment Llc | Machine and method of moving upper structure of machine |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04202919A (ja) * | 1990-11-29 | 1992-07-23 | Hitachi Constr Mach Co Ltd | 作業機の操作装置 |
| JPH0682153U (ja) * | 1993-05-06 | 1994-11-25 | 東洋運搬機株式会社 | 作業具水平装置 |
| JP2013167099A (ja) * | 2012-02-15 | 2013-08-29 | Hitachi Constr Mach Co Ltd | ホイールローダ |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3487958A (en) * | 1968-01-31 | 1970-01-06 | Caterpillar Tractor Co | Self-cycling loader |
| WO1996029478A1 (fr) * | 1995-03-22 | 1996-09-26 | Komatsu Ltd. | Dispositif de mise a niveau pour benne de vehicules industriels |
| JP3724982B2 (ja) * | 1999-05-19 | 2005-12-07 | 株式会社クボタ | バックホウ |
| JP2004036327A (ja) * | 2002-07-08 | 2004-02-05 | Tcm Corp | 荷役操作装置 |
| WO2008153533A1 (en) * | 2007-06-15 | 2008-12-18 | Deere & Company | Electronic parallel lift and anti-spill on a backhoe loader |
| KR101601978B1 (ko) * | 2009-12-03 | 2016-03-09 | 두산인프라코어 주식회사 | 휠로더 버켓의 풀 크라우드 디텐트 장치 |
| US8340875B1 (en) * | 2011-06-16 | 2012-12-25 | Caterpillar Inc. | Lift system implementing velocity-based feedforward control |
| CN202298691U (zh) * | 2011-08-30 | 2012-07-04 | 徐工集团工程机械股份有限公司科技分公司 | 动臂举升限位装置 |
| CN102733441B (zh) * | 2012-06-15 | 2015-04-22 | 三一重机有限公司 | 挖掘机升速控制节能系统及方法 |
| US8689471B2 (en) * | 2012-06-19 | 2014-04-08 | Caterpillar Trimble Control Technologies Llc | Method and system for controlling an excavator |
-
2014
- 2014-05-14 JP JP2014100742A patent/JP6309817B2/ja active Active
-
2015
- 2015-05-13 WO PCT/JP2015/063825 patent/WO2015174469A1/ja active Application Filing
- 2015-05-13 KR KR1020167023944A patent/KR101829789B1/ko active IP Right Grant
- 2015-05-13 US US15/122,208 patent/US10358794B2/en active Active
- 2015-05-13 CN CN201580011784.0A patent/CN106062284B/zh active Active
- 2015-05-13 EP EP15791915.0A patent/EP3144429B1/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04202919A (ja) * | 1990-11-29 | 1992-07-23 | Hitachi Constr Mach Co Ltd | 作業機の操作装置 |
| JPH0682153U (ja) * | 1993-05-06 | 1994-11-25 | 東洋運搬機株式会社 | 作業具水平装置 |
| JP2013167099A (ja) * | 2012-02-15 | 2013-08-29 | Hitachi Constr Mach Co Ltd | ホイールローダ |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3144429A1 (en) | 2017-03-22 |
| US20160369479A1 (en) | 2016-12-22 |
| JP6309817B2 (ja) | 2018-04-11 |
| EP3144429A4 (en) | 2018-01-24 |
| KR101829789B1 (ko) | 2018-02-19 |
| US10358794B2 (en) | 2019-07-23 |
| KR20160115968A (ko) | 2016-10-06 |
| JP2015218449A (ja) | 2015-12-07 |
| CN106062284A (zh) | 2016-10-26 |
| CN106062284B (zh) | 2018-01-23 |
| EP3144429B1 (en) | 2020-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI310353B (en) | Industrial vehicle | |
| US11408148B2 (en) | Working machine with control device to control operation allowable state and operation restriction state | |
| JP2007060982A (ja) | 作業車両の自動操縦装置 | |
| JP4373820B2 (ja) | 作業機械の前後進操作装置 | |
| US10983539B2 (en) | Work machine | |
| JP6309817B2 (ja) | 作業車両 | |
| JP7080783B2 (ja) | 作業機械 | |
| US20070295147A1 (en) | Joystick Device With Electric Latching Detents | |
| JP4936514B2 (ja) | 産業車両の油圧システム | |
| JP2009243077A (ja) | 作業機械の走行制御装置 | |
| JP4798658B2 (ja) | 産業車両の油圧システム | |
| KR101293314B1 (ko) | 휠 기종 건설 기계의 주행 안정화 장치 | |
| JP6433750B2 (ja) | 作業車両のステアリング制御装置 | |
| JP4617885B2 (ja) | クレーンのレバー操作反力制御装置 | |
| JP2017057607A (ja) | 建設機械 | |
| JP4229131B2 (ja) | ロック装置及びこれを備えた作業機械 | |
| JP2012092510A (ja) | 作業機械及び走行制御装置 | |
| JP3238978B2 (ja) | 移動式クレーンにおける方向切換弁の操作装置 | |
| JPS63235135A (ja) | 油圧走行車両の走行速度切換装置 | |
| JP2003138607A (ja) | クローラ車両 | |
| JPH061427U (ja) | 除雪作業装置を有する作業車両 | |
| JP2005186754A (ja) | 作業車両の四輪操舵装置 | |
| JPH05195550A (ja) | 土工機における油圧アクチュエータ制御装置 | |
| JPH07165386A (ja) | 油圧式建設機械の安全装置 | |
| JPH05195549A (ja) | 土工機における油圧アクチュエータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15791915 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15122208 Country of ref document: US |
|
| ENP | Entry into the national phase |
Ref document number: 20167023944 Country of ref document: KR Kind code of ref document: A |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015791915 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015791915 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |