WO2015084061A1 - 크랙 함유 전도성 박막을 구비하는 고감도 센서 및 그의 제조방법 - Google Patents
크랙 함유 전도성 박막을 구비하는 고감도 센서 및 그의 제조방법 Download PDFInfo
- Publication number
- WO2015084061A1 WO2015084061A1 PCT/KR2014/011790 KR2014011790W WO2015084061A1 WO 2015084061 A1 WO2015084061 A1 WO 2015084061A1 KR 2014011790 W KR2014011790 W KR 2014011790W WO 2015084061 A1 WO2015084061 A1 WO 2015084061A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- thin film
- high sensitivity
- sensitivity sensor
- sensor
- conductive thin
- Prior art date
Links
Images




















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D21/00—Measuring or testing not otherwise provided for
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/20—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress
- G01L1/22—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress using resistance strain gauges
- G01L1/2287—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress using resistance strain gauges constructional details of the strain gauges
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/58—After-treatment
- C23C14/5886—Mechanical treatment
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/16—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring the deformation in a solid, e.g. by resistance strain gauge
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/16—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying resistance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01H—MEASUREMENT OF MECHANICAL VIBRATIONS OR ULTRASONIC, SONIC OR INFRASONIC WAVES
- G01H1/00—Measuring characteristics of vibrations in solids by using direct conduction to the detector
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01H—MEASUREMENT OF MECHANICAL VIBRATIONS OR ULTRASONIC, SONIC OR INFRASONIC WAVES
- G01H11/00—Measuring mechanical vibrations or ultrasonic, sonic or infrasonic waves by detecting changes in electric or magnetic properties
- G01H11/06—Measuring mechanical vibrations or ultrasonic, sonic or infrasonic waves by detecting changes in electric or magnetic properties by electric means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/20—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress
- G01L1/22—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress using resistance strain gauges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L9/00—Measuring steady of quasi-steady pressure of fluid or fluent solid material by electric or magnetic pressure-sensitive elements; Transmitting or indicating the displacement of mechanical pressure-sensitive elements, used to measure the steady or quasi-steady pressure of a fluid or fluent solid material, by electric or magnetic means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L9/00—Measuring steady of quasi-steady pressure of fluid or fluent solid material by electric or magnetic pressure-sensitive elements; Transmitting or indicating the displacement of mechanical pressure-sensitive elements, used to measure the steady or quasi-steady pressure of a fluid or fluent solid material, by electric or magnetic means
- G01L9/0001—Transmitting or indicating the displacement of elastically deformable gauges by electric, electro-mechanical, magnetic or electro-magnetic means
- G01L9/0002—Transmitting or indicating the displacement of elastically deformable gauges by electric, electro-mechanical, magnetic or electro-magnetic means using variations in ohmic resistance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L9/00—Measuring steady of quasi-steady pressure of fluid or fluent solid material by electric or magnetic pressure-sensitive elements; Transmitting or indicating the displacement of mechanical pressure-sensitive elements, used to measure the steady or quasi-steady pressure of a fluid or fluent solid material, by electric or magnetic means
- G01L9/02—Measuring steady of quasi-steady pressure of fluid or fluent solid material by electric or magnetic pressure-sensitive elements; Transmitting or indicating the displacement of mechanical pressure-sensitive elements, used to measure the steady or quasi-steady pressure of a fluid or fluent solid material, by electric or magnetic means by making use of variations in ohmic resistance, e.g. of potentiometers, electric circuits therefor, e.g. bridges, amplifiers or signal conditioning
- G01L9/04—Measuring steady of quasi-steady pressure of fluid or fluent solid material by electric or magnetic pressure-sensitive elements; Transmitting or indicating the displacement of mechanical pressure-sensitive elements, used to measure the steady or quasi-steady pressure of a fluid or fluent solid material, by electric or magnetic means by making use of variations in ohmic resistance, e.g. of potentiometers, electric circuits therefor, e.g. bridges, amplifiers or signal conditioning of resistance-strain gauges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R27/00—Arrangements for measuring resistance, reactance, impedance, or electric characteristics derived therefrom
- G01R27/02—Measuring real or complex resistance, reactance, impedance, or other two-pole characteristics derived therefrom, e.g. time constant
- G01R27/08—Measuring resistance by measuring both voltage and current
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K1/00—Printed circuits
- H05K1/02—Details
- H05K1/0277—Bendability or stretchability details
- H05K1/0283—Stretchable printed circuits
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K1/00—Printed circuits
- H05K1/02—Details
- H05K1/0286—Programmable, customizable or modifiable circuits
- H05K1/0293—Individual printed conductors which are adapted for modification, e.g. fusable or breakable conductors, printed switches
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K1/00—Printed circuits
- H05K1/16—Printed circuits incorporating printed electric components, e.g. printed resistor, capacitor, inductor
- H05K1/167—Printed circuits incorporating printed electric components, e.g. printed resistor, capacitor, inductor incorporating printed resistors
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K3/00—Apparatus or processes for manufacturing printed circuits
- H05K3/22—Secondary treatment of printed circuits
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R27/00—Arrangements for measuring resistance, reactance, impedance, or electric characteristics derived therefrom
- G01R27/02—Measuring real or complex resistance, reactance, impedance, or other two-pole characteristics derived therefrom, e.g. time constant
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K2201/00—Indexing scheme relating to printed circuits covered by H05K1/00
- H05K2201/09—Shape and layout
- H05K2201/09209—Shape and layout details of conductors
- H05K2201/09654—Shape and layout details of conductors covering at least two types of conductors provided for in H05K2201/09218 - H05K2201/095
- H05K2201/09727—Varying width along a single conductor; Conductors or pads having different widths
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K2201/00—Indexing scheme relating to printed circuits covered by H05K1/00
- H05K2201/10—Details of components or other objects attached to or integrated in a printed circuit board
- H05K2201/10007—Types of components
- H05K2201/10053—Switch
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K2201/00—Indexing scheme relating to printed circuits covered by H05K1/00
- H05K2201/10—Details of components or other objects attached to or integrated in a printed circuit board
- H05K2201/10007—Types of components
- H05K2201/10151—Sensor
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K2203/00—Indexing scheme relating to apparatus or processes for manufacturing printed circuits covered by H05K3/00
- H05K2203/02—Details related to mechanical or acoustic processing, e.g. drilling, punching, cutting, using ultrasound
- H05K2203/0271—Mechanical force other than pressure, e.g. shearing or pulling
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K3/00—Apparatus or processes for manufacturing printed circuits
- H05K3/10—Apparatus or processes for manufacturing printed circuits in which conductive material is applied to the insulating support in such a manner as to form the desired conductive pattern
- H05K3/14—Apparatus or processes for manufacturing printed circuits in which conductive material is applied to the insulating support in such a manner as to form the desired conductive pattern using spraying techniques to apply the conductive material, e.g. vapour evaporation
- H05K3/16—Apparatus or processes for manufacturing printed circuits in which conductive material is applied to the insulating support in such a manner as to form the desired conductive pattern using spraying techniques to apply the conductive material, e.g. vapour evaporation by cathodic sputtering
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02D—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN INFORMATION AND COMMUNICATION TECHNOLOGIES [ICT], I.E. INFORMATION AND COMMUNICATION TECHNOLOGIES AIMING AT THE REDUCTION OF THEIR OWN ENERGY USE
- Y02D30/00—Reducing energy consumption in communication networks
- Y02D30/70—Reducing energy consumption in communication networks in wireless communication networks
Definitions
- the present invention relates to a high sensitivity sensor having a crack-containing conductive thin film and a method of manufacturing the same.
- a multifunctional high sensitivity sensor for detecting displacement, vibration and / or pressure using a conductive thin film having fine cracks and a simple and economical method thereof It relates to a method that can be produced.
- a high sensitivity sensor is a device that detects a minute signal and delivers it as data such as an electrical signal, which is one of the components required in the modern industry.
- capacitive sensors, piezoelectric sensors, strain gauges and the like are known as sensors for measuring pressure and tensile force.
- these sensors can only be driven in a specific environment, or are affected by various environmental factors other than pressure, such that the accuracy of the measured values is deteriorated. Is present.
- these sensors have a problem that it is difficult to manufacture a flexible structure due to its structural problems.
- the conventional microphone used for speech recognition has a problem that the ability to filter out noise is significantly reduced, the recognition rate is reduced in a noisy environment.
- the technical problem to be solved by the present invention is a multi-functional high-sensitivity sensor capable of detecting the small displacement, vibration and / or pressure change with excellent sensitivity while maintaining the accuracy of the measured value even after repeated use while being less affected by the environment To provide.
- Another technical problem to be solved by the present invention is to provide a method for manufacturing the high sensitivity sensor.
- the present invention to solve the above technical problem
- the conductive thin film includes a crack having a crack surface facing each other and at least some of the surfaces in contact with each other, and the electrical resistance changes as the contact surface changes or short-circuits or re-contacts as the crack surface moves according to an external physical stimulus. By measuring this change, it provides a high sensitivity sensor that measures external stimuli.
- the present invention to solve the other technical problem
- Inducing a crack in the conductive thin film provides a method of manufacturing a high sensitivity sensor comprising a.
- the high sensitivity sensor of the present invention can measure pressure and / or vibration with high sensitivity by using a conductive thin film having cracks formed on one surface of a support.
- a high-sensitivity sensor can be utilized for various purposes such as vibration sensor, pressure sensor, strain gauge, and can be used for various purposes such as artificial skin and voice recognition system because it can form a flexible structure.
- the high-sensitivity sensor can be mass-produced in a simple process and thus has a very high economy.
- FIG. 2 shows a schematic diagram of a high sensitivity sensor according to one embodiment of the invention.
- FIG. 3 shows a high sensitivity sensor manufactured in Example 1.
- FIG. 4 shows a partially enlarged view of the high sensitivity sensor manufactured in Example 1.
- FIG. 5 shows an enlarged view of a crack portion of the high sensitivity sensor manufactured in Example 1.
- FIG. 6 shows a crack partial atomic force micrograph of the high sensitivity sensor prepared in Example 1.
- FIG. 7 shows a change in resistance value according to the number of bending of the high sensitivity sensor manufactured in Example 1.
- Example 8 is a photograph showing the extent to which the crack surface is opened according to the strain size applied to the high sensitivity sensor manufactured in Example 1.
- FIG. 9 is a graph showing a change in electrical resistance according to a change in strain applied to the high sensitivity sensor manufactured in Example 1.
- Example 10 is a graph showing the conductivity characteristics according to the strain change of the high sensitivity sensor manufactured in Example 1.
- FIG. 11 shows an example of a high sensitivity sensor having a pattern manufactured in Example 2.
- FIG. 12 shows a pressure measurement process of a high sensitivity sensor having a pattern prepared in Example 2.
- FIG. 13 shows the pressure measurement results of the high sensitivity sensor having the pattern prepared in Example 2.
- FIG. 14 shows measurement results of a violin frequency according to Experimental Example 3.
- Example 15 shows a photograph in which the high sensitivity sensor according to Example 1 is attached to a vocal cord.
- FIG. 16 is a graph showing a speech recognition measurement result according to Experimental Example 4.
- FIG. 17 is a schematic view showing a droplet pressure measuring apparatus according to Experimental Example 5.
- FIG. 17 is a schematic view showing a droplet pressure measuring apparatus according to Experimental Example 5.
- FIG. 18 is a graph showing the droplet pressure measurement results in Experimental Example 5.
- FIG. 19 shows the measurement results of pulses according to Experimental Example 6.
- FIG. 20 is a schematic view showing a pressure measuring device according to Experimental Example 7.
- FIG. 20 is a schematic view showing a pressure measuring device according to Experimental Example 7.
- FIG. 21 is a graph showing the results of pressure measurement according to Experimental Example 7.
- FIG. 22 is a graph showing the results of pressure measurement according to Experimental Example 7.
- FIG. 22 is a graph showing the results of pressure measurement according to Experimental Example 7.
- High sensitivity sensor support; And a conductive thin film formed on the support, wherein the conductive thin film includes fine cracks having crack surfaces facing each other, and electrical characteristics change as the crack surfaces facing each other move according to a change in an external environment. It is a high sensitivity sensor using what it does.
- a thin film of metal is formed into a thin film by forming a small grain boundary (grain boundary) as a small nucleus of the metal is formed and the nucleus grows upon deposition.
- the grain boundary of the metal is cracked along the grain boundary as the stress accumulates around the boundary when the deformation comes from the outside. These cracks have been recognized as defects causing various defects and have been developed so far to minimize them.
- the micro-connection structure (interconnection) of the crack of the conductive thin film is artificially made and used as an electrical sensor for detecting a very small displacement or change in pressure or vibration. That is, among the cracks formed along the grain boundary generated during the formation of the conductive thin film, cracks having crack surfaces facing each other and at least partially contacting each other are present, and in case of applying an external stimulus such as vibration or pressure change, As the crack surface moves, the electrical resistance changes as the contact area changes, or an electrical short or an open is formed, thereby greatly changing the resistance value on the conductive thin film.
- the structure can be utilized as a high sensitivity sensor such as a displacement sensor, a vibration sensor, a pressure sensor and a strain gauge.
- the crack present in the conductive thin film may have a variety of forms, such a shape may vary depending on the shape of the grain boundary of the conductive thin film.
- the degree of occurrence of the crack may also vary depending on the thickness of the conductive thin film, formation conditions, and the like, and is not particularly limited.
- FIG. 1 shows cracks formed on a platinum thin film.
- 1 shows a partial enlarged view of a nano-sized crack structure formed by bending a platinum thin film having a thickness of about 20 nm formed on a support, wherein the crack is generated in one direction, that is, in the vertical direction of the figure.
- the crack lines are not connected to each other (parts indicated by dashed boxes) or long (parts shown by solid boxes).
- crack surfaces facing each other and crack surfaces in contact with each other exist, or crack surfaces having ends spaced apart from neighboring cracks at some intervals.
- the cracked surfaces that are in contact with each other may be moved or separated from each other by external physical stimuli, and thus the contact area may be changed or spaced apart. Accordingly, the electrical resistance may be changed, resulting in an electrical short circuit.
- Contact with the change causes a change in electrical resistance.
- the electrical resistance value of the conductive thin film is increased, and by measuring this, the presence or absence of the external stimulus, strength, and the like can be known.
- crack surfaces that are spaced at several nm intervals without first contacting each other may be contacted depending on external stimuli, thereby causing a change in electrical resistance.
- the metal that can be used for the crack-containing conductive thin film as described above can be used without limitation as long as it has a grain and can grow into a crystalline thin film, that is, a metal having polycrystalline, for example, platinum, nickel, copper, gold, silver Iron, chromium, magnesium, zinc, tin, aluminum, cobalt, manganese, tungsten, cadmium, palladium. Carbon or mixtures or alloys of two or more thereof can be used.
- the electrical resistance is small when there is no external stimulus, but the change in electrical resistance is large according to the change of the contact surface of the crack with the external stimulus. It is advantageous to manufacture high sensitivity sensors.
- the conductive thin film is not limited in thickness, but preferably has a thickness such that cracks can be formed by mechanical methods such as tensile and bending, and the formation conditions of such cracks may be formed of each metal. It may vary depending on the type of. For example, the thickness of the conductive thin film may be about 20 to 40 nm, or about 60 nm.
- the support on which the conductive thin film is formed may include a polymer in a film form, and the support may have a single layer or a multilayer structure.
- a soft polymer layer may be formed on the base film.
- the soft polymer polyurethane acrylate, polystyrene, polyethylene glycol, or Noland optical adhesive (NOA) may be used.
- the base film may be a polyethylene terephthalate film, polyimide, polydimethylsiloxane (PDMS) and the like, but is not limited thereto.
- the support may have a thickness of about 20 to 50 ⁇ m, but is not limited thereto.
- the base film may have a thickness of about 20 to 50 ⁇ m, but is not limited thereto.
- the soft polymer layer may have a thickness of about 1 to 10 ⁇ m, but is not limited thereto.
- the conductive thin film may be formed on at least one surface of the support, and after the conductive thin film is formed on the support, an additional layer may be further formed thereon.
- an additional layer the soft polymer layer described above can be used.
- the crack-containing high sensitivity sensor of the present invention as described above can be manufactured by the following method.
- a conductive thin film may be formed on at least one surface of the support by using a method such as vapor deposition thereon. Thereafter, cracks may be induced in the conductive thin film.
- a base film in the form of a thin film may be used as the support, for example, a polyethylene terephthalate film, polyimide, polydimethylsiloxane, or the like of about 20 to 50 ⁇ m may be used.
- the support may be any material that is not electrically conductive, and may be appropriately selected depending on whether it is a condition requiring a lot of tensile force, a condition requiring a high sensitivity tension / force sensor, or a condition requiring high sensitivity vibration. It can be appropriately selected depending on the application.
- the conductive thin film may be directly formed on the single layer support, but a polymer layer having additional soft properties may be further formed on the support to control adhesion and bending characteristics, crack density and shape with the conductive thin film. .
- the conductive thin film may be more tightly bonded to the support, and may be easily stretched or bent, thereby facilitating the formation of cracks.
- there is an advantage in that the density and length of the crack can be adjusted by adjusting the modulus difference with the metal. This may play an important role in adjusting the sensitivity and vibration frequency recognition range of the sensor of the present invention.
- a type such as polyurethane acrylate (PUA), polystyrene (PS), polyethylene glycol, Norland optical adhesive (NOA), polydimethylsiloxane (PDMS) may be used, but more various materials are used. It is possible. At this time, the coating method takes a different procedure depending on the material. In the case of PUA, PEG, and NOA, it becomes a solid solid after irradiation with UV-curable material (I-line; 365 nm), but the initial state is in liquid form.
- a thin film having a uniform thickness can be formed using a method such as spin coating (that is, a method of applying a constant thickness using rapid rotation). The thickness of the coating may be adjusted according to the rotation speed, and may be affected by the viscosity of the material or the humidity of the surrounding environment.
- a crystalline silicon wafer can be used as a method that can be applied, for example, and the surface roughness is extremely small to form a flat surface.
- the thickness of the polymer layer may be adjusted by adjusting the pressing force. For example, when pressed for 10 to 60 minutes at 10 to 30 Pa pressure, the thickness is formed in the range of 1 to 10 ⁇ m.
- the polymer layer coated in this manner may be formed in a thin film form by placing in a UV chamber (365 nm wavelength) and curing the UV, for example, for about 30 seconds to 5 minutes.
- toluene which is an organic solvent
- toluene which is an organic solvent
- the toluene is evaporated for about 1 to 30 minutes in an environment of about 30 to 80 °C using a hot plate or an oven to form a thin thin film form again.
- a conductive thin film may be formed thereon.
- the conductive thin film may be formed in a thin film form by a conventional deposition method, for example, chemical vapor deposition (CVD), sputtering, electron gun evaporation (E-gun evaporation), thermal evaporation (Thermal evaporation).
- CVD chemical vapor deposition
- E-gun evaporation electron gun evaporation
- Thermal evaporation Thermal evaporation
- the metal capable of forming such a conductive thin film one or more metals as described above may be used.
- the crack is formed according to the state of the film quality depending on the deposition conditions.
- a platinum or the like having excellent electrical conductivity was used through a sputtering method, and the thinner the deposition thickness, the more easily deposited cracks were deposited in a predetermined range of thicknesses. At this time, if the conductive thin film layer is too thin, the electrical properties deteriorate, so it is good to raise the appropriate thickness.
- the metal shadow mask having the above-mentioned perforated shape is placed on the polymer layer and then deposited to facilitate various deformation of the shape of the sensor.
- a notch having a predetermined size of the central portion of the film in the longitudinal direction can be formed.
- the notch shape is for distinguishing the part forming the crack and is not an essential condition.
- cracks may be formed thereon.
- the crack may be formed along the grain boundary, but is not limited thereto and may be irregularly formed in various forms. However, the average form can be changed through external conditions.
- the support has an elongating property
- a conductive thin film having a rigid structure present on the support is applied by applying a tensile force, that is, a pulling force at both ends of the support. Forces beyond the tensile limit will cause cracks to form.
- the tensile force is insufficient, the formation of cracks may be insufficient, and when the tensile force is strong, the conductive thin film may be broken, and thus, an appropriate amount of tensile force may be applied according to the thickness of the thin film.
- a method of bending may also be used.
- cracks may be formed evenly over the conductive thin film. At this time, it is possible to appropriately control the magnitude and degree of occurrence of the crack by controlling the magnitude of the tensile force. Such cracks still exist even when the tensile force is released to form a fine bonded structure.
- the bending method can be used as the mechanical method. Since the bending method mainly causes cracks in the area where the conductive thin film is bent, it is easy to control the area where the crack is generated, and it is also easy to control the size, extent, generation area, etc. of the crack by controlling the bend angle. .
- Cracks formed by such a method may have a fine thickness, and may have a nano-level thickness, for example, in the range of 0.1 to 400 nm. This thickness can be measured based on the largest crack present in the crack formed in the longitudinal direction.
- the length or frequency of such cracks is not limited, and may vary depending on the size of the thin film used, the stretch or the degree of bending. Depending on the physical elements such as the thickness and length of the cracks, the microjunction structure according to the cracks may vary, and thus the electrical properties they exhibit may vary.
- FIG. 2 shows a schematic diagram of a crack-containing high sensitivity sensor according to one embodiment.
- a conductive thin film 3 is formed on the supports 1 and 2, and the support includes a base film 1, and, if necessary, a soft polymer layer on the base film 1. 2) is further formed. Both ends of the conductive thin film 3 are electrically connected to each other, and the detector 4 is present in the middle thereof.
- the detector 4 mainly detects an electrical resistance value of the conductive thin film, and thus needs to measure a minute resistance value, and thus can be connected to the conductive thin film in series like a general ammeter.
- the crack-containing high sensitivity sensor according to the present invention is a reversible electrical junction sensor having a very low resistance because it measures the external stimulus using a nano-level crack, and also can measure the pressure, strain, vibration (vibration) It is a multifunctional sensor.
- the flexible material since the flexible material is used as a support for supporting the conductive thin film, it may have a property that can be bent.
- it responds finely to small pressures and forces, and shows sensitivity to large changes in small changes in pressure and force ranges that can be measured by the detector.
- the crack that is, the nano-level junction structure is easily returned to its original state after measurement, there is almost no deviation of the measured value even if it is used repeatedly, and the material and the structure are simple and inexpensive, so the production is easy Have Therefore, it can be applied to various fields.
- the crack-containing high sensitivity sensor using a nano-scale junction structure of the crack has a very low electrical resistance value, through which high sensitivity can be obtained.
- the high-sensitivity sensor having a reversible electrical bonding system may exhibit very high sensitivity as the contact area changes as the nano-level crack surface moves according to an external physical stimulus, or the electrical characteristics change greatly as a short circuit or recontact occurs.
- the gauge factor may have a value of approximately 1 to 5 ⁇ 10 8
- the pressure sensitivity may have a high level of sensitivity of approximately 0.1 to 1,000 KPa ⁇ 1 .
- it can be applied to various applications such as a flexible support and there is a feature that can be used repeatedly.
- Another field may include artificial skin.
- Subsequent evolutionary generations have very strong skin regeneration. However, the higher the evolutionary development, the lower the regeneration, which is the weakest in humans compared to other organisms.
- the damaged skin may heal on its own, but it is impossible to regenerate in severe damage such as burns.
- artificial skin is used.
- One of the major issues in this area is artificial skin that can detect stimuli. Due to the nature of artificial skin made of collagen, external stimuli cannot be detected, because the nature of the skin located at the outermost part of the body is necessary to detect the stimulus.
- the high-sensitivity sensor according to the present invention can be manufactured very thin because it uses the resistance change of the fine junction structure present in a single conductive thin film, and is suitable for artificial skin in that it can respond to even a small stimulus.
- pressure and tension as well as vibration can be recognized at the same time shows the performance similar to the real skin and has the advantage of repeatedly detecting the stimulus.
- because it is made of a flexible material can be bent is also easy to apply to artificial skin.
- a voice recognition system can be exemplified.
- the existing speech recognition system recognizes the sound signal transmitted through the air as a microphone and divides it into syllables or phonemes to match the existing database, and shows a very high recognition rate in a quiet environment.
- the high-sensitivity vibration sensor according to the present invention has the advantage of significantly increasing the recognition rate by recognizing only the vibration of the speaker transmitted through the air and filtering the noise transmitted through the skin when attached to the skin.
- a concave shape SUS shadow mask (about 200 ⁇ m thickness) of about 5mm in the center portion is padded and then deposited by using a sputtered platinum 20nm thick A thin film was formed.
- the metal deposition base film formed by using the mask was cut out by about 1 mm along a mask shape and cut out using a knife or scissors in a square shape having a size of 10 mm ⁇ 37 mm.
- the rectangular film thus formed is held at both ends, and the aforementioned concave region in the center portion is rolled on a glass rod having a curvature radius of 1 mm, 2 mm, and 3 mm to form nano-level cracks in the platinum thin film.
- High sensitivity sensors were made. At this time, since the crack pattern may vary depending on the degree of tension, pure bending is performed as much as possible.
- silver paste was applied to both ends of the sensor as a conductive material and wires were connected to fabricate a crack-containing high sensitivity sensor.
- FIG. 3 A SEM photograph of the manufactured high sensitivity sensor is shown in FIG. 3. 4 is an enlarged photograph of the high-sensitivity sensor, wherein an enlarged view of the center portion of the recess is shown in FIG.
- FIG 6 is an AFM (atomic force microscope) photograph of microcracks present in the platinum thin film, and it can be clearly seen that nano-level cracks are formed in the platinum thin film.
- resistance collection was performed by connecting two electrodes from both ends of the sensor to a detector, and then connecting the detector to a computer through a dedicated cable and collecting the data in the form of a text file.
- the detector used PXI-4071 manufactured by National Instruments Inc. and the sampling rate per second was 100.
- FIG. 9 is a graph showing a change in electrical resistance according to a change in strain applied to the high sensitivity sensor manufactured in Example 1.
- FIG. 9A illustrates the change in electrical resistance measured while pulling up to a maximum of 2% strain at a rate of 1 mm / min and returning to the original state, that is, 0% strain
- FIG. 9B at a rate of 0.1 mm / min. After tensioning up to 2% strain, return to the original 0% strain state and show the change in electrical resistance measured.
- Figure 9b is a measure of the change in resistance while loading at a tensile rate of 0.1 mm / min, showing a reversible change of 2% or more of the initial resistance and returning to the original resistance value while unloading strain. . It can be seen that the resistance change depends on the tensile speed, and the sensitivity of the sensor defined as resistance change / initial resistance / strain at 2% strain at 0.1 mm / min exceeds 2000.
- FIG. 9B shows a change in the resistance value of the platinum thin film without the pattern prepared in Example 1, and shows that the resistance change is insignificant in the case of the platinum thin film without cracks.
- the theory of FIG. 9b refers to theoretical modeling and is in good agreement with the experimental data.
- FIG. 10 is a graph showing the conductivity characteristics according to the strain change of the high sensitivity sensor manufactured in Example 1. Specifically, FIG. 10 shows a graph 10a showing S (initial resistance R0 / resistance R) and a graph 10b taking a negative value after differentiating the conductivity according to strain.
- FIG. 10A when the strain is applied, the conductivity of the crack-containing thin film decreases as the gap between the crack surface increases.
- 10A is an enlarged view of the change in the initial conductivity, and it can be seen that there are numerous variations depending on the strain given the conductivity.
- This variable conductivity can be expressed as shown in FIG. 10B by taking a negative value after differentiating it according to strain. Numerous positive and negative peaks can be represented, which results from variations in conductivity as strain is applied.
- the positive peaks in FIG. 10B are opposite to each other and indicate the moment when the crack surfaces that were in contact with each other are spaced apart when strain is applied. Indicates the moment of recontact with the crack surface.
- the polymer support Since the polymer support has a positive Poisson's ratio, it is contracted in the direction perpendicular to the tension direction when tensioned. The average of 100 data of positive and negative peaks is shown in red color, and it can be seen that it has a positive value. This means that when the tension is applied, numerous crack faces facing each other are separated and recontacted. On average, the conductivity of the thin film is shown to decrease. This shows a tendency to coincide with FIG. 9 where the resistance of the thin film increases when tension is applied.
- 10B shows a negative value after differentiating the conductivity of the platinum thin film without the pattern prepared in Example 1 according to the strain. 10b shows that there is no crack and that the size is very small compared to the case where there is a crack.
- a high sensitivity sensor having the pattern described in FIG. 11 was prepared as follows.
- a liquid polyurethane acrylate was applied on a polyethylene terephthalate (PET) base film having a sufficiently wide 50 ⁇ m thickness of 70 mm x 70 mm, and then a flat silicon wafer and a book weighing about 2 kg were placed for about 30 minutes. It was left. Subsequently, the book was separated and the support layer was turned toward the uv lamp while the wafers were bonded to each other, followed by irradiation of 365 nm ultraviolet light for about 1 minute to form a soft polymer layer having a thickness of about 3 ⁇ m on the base film.
- PET polyethylene terephthalate
- a 200 ⁇ m thick SUS shadow mask was padded on the support, and platinum was deposited to a thickness of 20 nm using a sputter in a large area.
- the sputter used MHS-1500 model of Infinite Co., Ltd., and the following deposition conditions were used.
- the concave region of the center portion was rolled on a glass rod having a radius of curvature of 1 mm, so that fine cracks were generated in the platinum thin film formed on the pattern.
- a 200 ⁇ m thick SUS shadow mask was padded onto the support on which the fine cracked platinum thin film was formed, and a thin film of gold was deposited to a thickness of 60 nm using a thermal evaporator to form a first electrode.
- a 200 ⁇ m thick SUS shadow mask was padded and the silica layer was formed to a thickness of 200 nm using a thermal evaporator to form an insulating layer.
- a gold thin film was again formed on the insulating layer to a thickness of 60 nm using a SUS mask and a thermal evaporator having a thickness of 200 ⁇ m to form a second electrode.
- Example 1 wires were connected to both ends of the first electrode and the second electrode using silver paste to fabricate a multichannel sensor system.
- PDMS pieces similar in weight to one insect were placed on different positions on a predetermined region of the high sensitivity sensor manufactured in Example 2, and in Example 2
- the resistance values of 64 sensors were measured through the detector.
- the value of each channel is stored independently.
- the resistance value is changed independently where the insect and PDMS fragments are located. Therefore, it can be seen that the high-sensitivity sensor finely senses a change in minute pressure for each location.
- the high sensitivity sensor detects the change and the change of the resistance value is sensed.
- the frequency graph is a Fourier transform of resistance data obtained through the PXI-4071 instrument using a matlab program, and the sampling rate is 10000.
- the voice is pronounced in English as “Go”, “Stop”, “Jump”, and “Shoot”.
- the resistance value obtained through National Instruments' PXI-4071 device is stored in the computer and used as a spectrogram. Converted to. At this time, the sampling rate was 10000 and the spectrogram WINDOW was 500.
- the high-sensitivity sensor prepared in Example 1 was placed under contact with a slit having a superhydrophobic surface, and then 3 ⁇ l of water droplets were dropped on the surface at a height of 30 mm to obtain a result. 18 is shown. The video was shot at 1,000 frames per second. As shown in FIG. 18, it can be seen that the resistance value of the high sensitivity sensor is changed every time the water droplet splashes on the superhydrophobic surface.
- Both ends of the high sensitivity sensor manufactured in Example 1 were attached to the wrist using double-sided tape, and then the change in resistance value according to the pulse was measured and shown in FIG. 19. At this time, non-polar substances such as silicone oil can be applied to the wrist for better contact and more sensitive measurement data. As shown in FIG. 19, it can be seen that the high-sensitivity sensor senses vibration and pressure of the pulse to change the resistance value.
- the change in the pressure applied to the high sensitivity sensor is directly connected to the change in the resistance value, whereby a delay time between the change in the pressure applied to the high sensitivity sensor and the change in the resistance value is obtained. Almost none, it can be seen that pressure changes were detected in near real time.
- the high sensitivity sensor of the present invention can measure pressure and / or vibration with high sensitivity by using a conductive thin film having cracks formed on one surface of a support.
- a high-sensitivity sensor can be utilized for various purposes such as vibration sensor, pressure sensor, strain gauge, and can be used for various purposes such as artificial skin and voice recognition system because it can form a flexible structure.
- the high-sensitivity sensor can be mass-produced in a simple process and thus has a very high economy.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Metallurgy (AREA)
- Organic Chemistry (AREA)
- Mechanical Engineering (AREA)
- Materials Engineering (AREA)
- Manufacturing & Machinery (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Investigating Strength Of Materials By Application Of Mechanical Stress (AREA)
Abstract
크랙 함유 고감도 센서가 제공된다. 상기 고감도 센서는 지지체 상에 형성된 전도성 박막에 미세 크랙을 형성하여 얻어지며, 상기 미세 크랙이 형성하는 미세 접합구조에서 이들이 전기적으로 변화, 단락 또는 개방됨에 따라 저항값의 변화가 발생하여 외부 자극을 전기적 신호로 변환하게 된다. 이와 같은 고감도 센서는 변위센서, 압력센서, 진동센서, 인공 피부, 음성인식 시스템 등에 유용하게 사용할 수 있다.
Description
본 발명은 크랙 함유 전도성 박막을 구비하는 고감도 센서 및 그의 제조방법에 관한 것으로, 미세한 크랙이 형성된 전도성 박막을 사용하여 변위, 진동 및/또는 압력을 감지하는 다기능 고감도 센서 및 이를 간단하고 경제적인 방법으로 제조할 수 있는 방법에 관한 것이다.
일반적으로 고감도 센서는 미세한 신호를 감지하여 이를 전기적 신호 등의 데이터로 전달하는 장치로서 현대산업에서 필수적으로 요구되는 부품 중 하나이다. 이와 같은 센서 중 압력이나 인장력을 측정하는 센서로서는 정전용량(capacitive) 센서, 압전기(piezoelectric) 센서, 스트레인 게이지 등이 알려져 있다.
그러나 이와 같은 센서들은 특정 환경에서만 구동이 가능하거나, 압력 외의 다양한 환경적 요인에 의해 영향을 받아 측정값의 정확성이 저하되는 등의 문제가 존재함과 동시에 반복 구동 시 일정한 측정값을 확보하기 곤란한 문제가 존재한다. 또한 이들 센서는 자체의 구조적인 문제로 인하여 플렉시블 구조체를 제조하기 곤란하다는 문제가 존재한다.
또한 음성인식에 쓰이는 기존의 마이크는 잡음을 걸러내는 기능이 현저히 떨어져 노이즈가 심한 환경에서는 인식률이 저하된다는 문제가 있다.
따라서 이러한 문제점을 보완할 수 있는 새로운 방식의 고감도 센서 및 음성인식 시스템의 개발이 요구되고 있다.
본 발명이 해결하고자 하는 기술적 과제는 환경에 의한 영향을 적게 받으면서 반복적인 사용에도 측정값의 정확도가 유지되며, 감도가 우수한 미세한 변위, 진동 및/또는 압력의 변화를 감지할 수 있는 다기능의 고감도 센서를 제공하는 것이다.
본 발명이 해결하고자 하는 다른 기술적 과제는 상기 고감도 센서의 제조방법을 제공하는 것이다.
상기 기술적 과제를 해결하기 위하여 본 발명은,
지지체; 및
상기 지지체의 적어도 일면 상에 형성되는 전도성 박막;을 구비하며,
상기 전도성 박막이, 서로 마주하면서 적어도 일부 면이 서로 접촉하고 있는 크랙면을 갖는 크랙을 포함하고, 외부 물리적 자극에 따라 상기 크랙면이 이동하면서 접촉면적이 변화하거나 단락 혹은 재접촉되면서 전기적 저항이 변화하게 되고 이 변화를 측정함으로써 외부 자극을 측정하는 고감도 센서를 제공한다.
상기 다른 기술적 과제를 해결하기 위하여 본 발명은,
지지체의 적어도 일면 상에 전도성 박막을 형성하는 단계; 및
상기 전도성 박막에 크랙을 유도하는 단계;를 포함하는 고감도 센서의 제조방법을 제공한다.
본 발명의 고감도 센서는 지지체의 일면 상에 크랙이 형성된 전도성 박막을 이용하여, 높은 감도로 압력 및/또는 진동을 측정할 수 있게 된다. 이와 같은 고감도 센서는 진동센서, 압력센서, 스트레인게이지 등 다양한 용도로 활용가능하며, 플렉시블한 구조체를 형성할 수 있으므로 인공피부 및 음성인식 시스템 등 다양한 용도에 활용할 수 있다.
상기 고감도 센서는 간단한 공정으로 대량 생산이 가능하므로 매우 높은 경제성을 갖는다.
도 1은 본 발명의 일구현예에 따른 백금 박막에 형성된 미세 크랙을 나타낸다.
도 2는 본 발명의 일구현예에 따른 고감도 센서의 개략도를 나타낸다.
도 3은 실시예 1에서 제조된 고감도 센서를 나타낸다.
도 4는 실시예 1에서 제조된 고감도 센서의 부분 확대도를 나타낸다.
도 5는 실시예 1에서 제조된 고감도 센서의 크랙 부분 확대도를 나타낸다.
도 6은 실시예 1에서 제조된 고감도 센서의 크랙 부분 원자힘 현미경 사진을 나타낸다.
도 7은 실시예 1에서 제조된 고감도 센서의 구부림 횟수에 따른 저항값의 변화를 나타낸다.
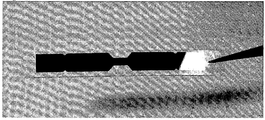
도 8은 실시예 1에서 제조된 고감도 센서에 가해지는 스트레인 크기에 따라 크랙면이 벌어지는 정도를 보여주는 사진이다.
도 9는 실시예 1에서 제조된 고감도 센서에 가해지는 스트레인 변화에 따른 전기저항의 변화를 나타내는 그래프이다.
도 10은 실시예 1에서 제조된 고감도 센서의 스트레인 변화에 따른 전도도 특성을 나타내는 그래프이다.
도 11은 실시예 2에서 제조된 패턴을 갖는 고감도 센서의 일예를 나타낸다.
도 12는 실시예 2에서 제조된 패턴을 갖는 고감도 센서의 압력 측정 과정을 나타낸다.
도 13은 실시예 2에서 제조된 패턴을 갖는 고감도 센서의 압력 측정 결과를 나타낸다.
도 14는 실험예 3에 따른 바이올린 주파수의 측정 결과를 나타낸다.
도 15는 실시예 1에 따른 고감도 센서를 성대에 부착시킨 사진을 나타낸다.
도 16은 실험예 4에 따른 음성 인식 측정 결과를 나타내는 그래프이다.
도 17은 실험예 5에 따른 물방울 압력 측정 장치를 나타내는 개략도이다.
도 18은 실험예 5에서 물방울 압력 측정 결과를 나타내는 그래프이다.
도 19는 실험예 6에 따른 맥박의 측정 결과를 나타낸다.
도 20은 실험예 7에 따른 압력 측정 장치를 나타내는 개략도이다.
도 21은 실험예 7에 따른 압력 측정 결과를 나타내는 그래프이다.
도 22는 실험예 7에 따른 압력 측정 결과를 나타내는 그래프이다.
본 발명은 다양한 변환을 가할 수 있고 여러 가지 실시예를 가질 수 있는 바, 특정 실시예들을 도면에 예시하고 상세한 설명에 상세하게 설명하고자 한다. 그러나, 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변환, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다. 본 발명을 설명함에 있어서 관련된 공지 기술에 대한 구체적인 설명이 본 발명의 요지를 흐릴 수 있다고 판단되는 경우 그 상세한 설명을 생략한다.
이하, 본 발명의 구현예에 따른 크랙 함유 고감도 센서에 대하여 보다 상세하게 설명한다.
본 발명의 일구현예에 따른 고감도 센서는 지지체; 및 상기 지지체 상에 형성되는 전도성 박막;을 구비하며, 상기 전도성 박막은 서로 마주하고 있는 크랙면을 갖는 미세 크랙을 포함하고, 서로 마주하고 있는 크랙면이 외부 환경의 변화에 따라 움직이면서 전기적 특성이 변화하는 것을 이용하는 고감도 센서이다.
일반적으로 금속의 박막은 증착시 금속의 작은 핵이 형성되고 그 핵이 성장하면서 그레인 바운더리 (grain boundary)를 형성하며 박막으로 형성된다. 이러한 금속의 그레인 바운더리는 외부로부터 변형이 왔을 때 그 바운더리 주변에 스트레스가 축적됨에 따라 상기 그레인 바운더리를 따라 크랙이 형성된다. 이러한 크랙은 여러 가지 결함을 유발하는 결함으로 인식되어 지금까지는 이를 최소화시키는 방법 위주로 발전되어 왔다.
본 발명에서는 상기 전도성 박막의 크랙이 가지는 미세 접합 구조 (interconnection)를 인위적으로 만들고 이를 통해 매우 작은 변위 또는 압력이나 진동의 변화를 감지하는 전기적 센서로 활용하게 된다. 즉, 전도성 박막의 형성시 발생한 그레인 바운더리를 따라 형성시킨 크랙 중에는 서로 마주하면서 적어도 일부면이 서로 접촉하고 있는 크랙면을 갖는 크랙이 존재하게 되고 진동이나 압력 변화와 같은 외부 자극을 가할 경우 애초에 접촉되어 있던 크랙면이 이동하면서 접촉 면적이 바뀜에 따라 전기적 저항이 변화하거나 전기적 단락(short)이나 개방(open)이 형성되어 상기 전도성 박막상의 저항값의 변화가 크게 발생하게 되며, 이를 검출함으로써 상기 전도성 박막 구조체를 변위 센서, 진동센서, 압력센서, 스트레인 게이지와 같은 고감도 센서로서 활용이 가능하게 된다.
일구현예에 따르면, 상기 전도성 박막에 존재하는 크랙은 다양한 형태를 가질 수 있으며, 이와 같은 형태는 상기 전도성 박막의 그레인 바운더리의 형태에 따라 달라질 수 있다. 또한 상기 크랙이 발생하는 정도 또한 전도성 박막의 두께, 형성 조건 등에 따라 달라질 수 있으며 특별히 제한되지 않는다.
예를 들어, 도 1에는 백금 박막 상에 형성된 크랙이 도시되어 있다. 상기 도 1에 도시된 크랙은 지지체 상에 형성된 약 20 nm 정도의 두께의 백금 박막을 구부려 형성된 나노 크기 크랙 구조체의 부분 확대도를 나타내며, 여기서 크랙은 한 방향으로 즉 그림의 수직 방향으로 발생되어 있으며 크랙선이 서로 연결되어 있지 않거나 (점선박스로 표시한 부분), 길게 연결된(실선박스로 표시한 부분) 구조를 갖는다.
도 1의 실선 박스에 있는 크랙선을 확대하여 보면 서로 마주 보는 크랙면과 서로 접촉되어 있는 크랙면이 존재하거나 이웃하는 크랙과 약간의 간격을 가지고 이격되어 있는 단부를 갖는 크랙면이 존재하게 된다. 서로 접촉되어 있는 크랙면은 외부 물리적 자극에 의해 서로 이동하면서 접촉 면적이 달라지거나 이격될 수 있으며 이에 따라 전기적 저항이 바뀌어 전기적 단락이 발생할 수 있으며, 외부 물리적 자극으로 이격되었던 크랙면이 다른 외부 자극의 변화로 다시 접촉하여 전기적 저항의 변화를 발생하게 된다. 외부 자극에 의해 애초에 접촉되어 있던 크랙면이 이동하면서 상기 전도성 박막의 전기적 저항값이 증가하게 되고, 이를 측정함으로써 상기 외부자극의 유무, 강도 등을 알 수 있게 된다. 또한 애초에 접촉하지 않고 수 nm 간격으로 이격되어 있던 크랙면도 외부 자극에 따라서는 접촉될 수 있어 전기적 저항의 변화를 일으킬 수 있다.
상기와 같은 크랙 함유 전도성 박막에 사용될 수 있는 금속은 그레인을 가지고 결정성 박막으로 성장할 수 있는 금속, 즉 다결정성을 갖는 금속이라면 제한 없이 사용할 수 있으며, 예를 들어 백금, 니켈, 구리, 금, 은, 철, 크롬, 마그네슘, 아연, 주석, 알루미늄, 코발트, 망간, 텅스텐, 카드뮴, 팔라듐. 탄소 또는 이들의 2종 이상 혼합물 또는 합금을 사용할 수 있다. 센서의 감도를 높이기 위해서는 외부 자극이 없을 때 전기 저항이 작다가 외부 자극으로 크랙면이 접촉하는 정도의 변화에 따라 전기적 저항의 변화가 큰 것이 바람직하므로 백금, 구리, 알루미늄 등 전도성이 높은 금속 박막이 고감도의 센서를 제작하는 데 유리하다.
일구현예에 따르면, 상기 전도성 박막은 그 두께가 한정되는 것은 아니나 인장 및 구부림 등의 기계적 방법에 의해 크랙이 형성될 수 있는 정도의 두께를 갖는 것이 바람직하며, 이와 같은 크랙의 형성 조건은 각 금속의 종류에 따라 달라질 수 있다. 예를 들어 상기 전도성 박막의 두께로서 약 20 내지 40 nm, 또는 약 60 nm 를 예로 들 수 있다.
상기 전도성 박막이 형성되는 지지체로서는 필름 형태의 폴리머를 예시할 수 있으며, 이와 같은 지지체는 단일층 혹은 다중층 구조를 가질 수 있다. 상기 지지체가 다중층 구조를 갖는 경우, 베이스 필름 상에 연질 폴리머층이 형성된 구조를 가질 수 있으며, 이와 같은 연질 폴리머로서는 폴리우레탄 아크릴레이트, 폴리스티렌, 폴리에틸렌 글리콜, 놀랜드 옵티칼 접착제(NOA) 등을 사용할 수 있으며, 상기 베이스 필름으로서는 폴리에틸렌 테레프탈레이트 필름, 폴리이미드, 폴리디메틸실록산(PDMS) 등을 예시할 수 있으나 이에 한정되는 것은 아니다.
상기 지지체는 약 20 내지 50㎛의 두께를 가질 수 있으나, 이에 한정되는 것은 아니다.
상기 지지체가 베이스 필름 및 연질 폴리머층을 함유하는 다중층의 경우, 상기 베이스 필름은 약 20 내지 50㎛의 두께를 가질 수 있으나, 이에 한정되는 것은 아니다. 또한 상기 연질 폴리머층은 약 1 내지 10㎛의 두께를 가질 수 있으나, 이에 한정되는 것은 아니다.
상기 전도성 박막은 상기 지지체의 적어도 일면 상에 형성될 수 있으며, 전도성 박막이 상기 지지체 상에 형성된 후, 그 위에 추가적인 층이 더 형성될 수 있다. 이와 같은 추가층으로서는 상술한 연질 폴리머층 등이 가능하다.
상술한 바와 같은 본 발명의 크랙 함유 고감도 센서는 이하의 방법으로 제조할 수 있다.
우선, 통상의 방법으로 지지체를 형성한 후, 그 위에 증착 등의 방법을 사용하여 상기 지지체의 적어도 일면 상에 전도성 박막을 형성할 수 있다. 이후 상기 전도성 박막에 크랙을 유도할 수 있다.
일구현예에 따르면, 상기 지지체로서는 얇은 필름 형태의 베이스 필름을 사용할 수 있으며, 예를 들어 약 20 내지 50㎛의 폴리에틸렌 테레프탈레이트 필름, 폴리이미드, 폴리디메틸실록산 등을 사용할 수 있다. 이 때 지지체는 전기가 통하지 않는 물질이면 어떤 것이든 무방하며, 많은 인장력이 필요한 조건인지 아니면 고감도의 인장/힘 센서가 필요한 조건인지 혹은 고감도의 진동이 필요한 조건인지에 따라 적절히 선택할 수 있으며, 두께 또한 적용 분야에 따라 적절히 선택할 수 있다.
이와 같은 단일층 지지체 위에 전도성 박막을 직접 형성할 수 있으나, 전도성 박막과의 접착력 및 구부림 특성, 크랙의 밀도와 형태를 조절하기 위해 상기 지지체 상에 추가적으로 연질 물성을 갖는 폴리머층을 더 형성할 수 있다. 이와 같은 추가적인 폴리머층을 통해 전도성 박막이 지지체와 더 단단하게 결합할 수 있으며, 늘림이나 구부림 등이 용이해져 크랙의 형성이 용이해질 수 있다. 이 외에도 금속과의 모듈러스 차이를 조절하여 크랙의 조밀함 정도와 길이 모양 등을 조절할 수 있는 장점이 있다. 이는 본 발명의 센서의 감도 및 진동 주파수 인식 범위 등을 조절하는데 중요한 역할을 할 수 있다.
상기와 같은 폴리머층으로서는 폴리우레탄 아크릴레이트(PUA), 폴리스티렌(PS), 폴리에틸렌 글리콜, 놀랜드 옵티칼 접착제(NOA), 폴리디메틸실록산(PDMS)와 같은 형태를 사용할 수 있으나 이 외의 더 다양한 물질이 사용 가능하다. 이 때 도포 방법은 재질에 따라 상이한 절차를 밟게 되는데, PUA, PEG, NOA 같은 경우 UV 경화성 물질로 자외선(I-line; 365 nm)을 조사한 후에는 딱딱한 고체가 되지만 처음 상태는 액상 형태로 되어 있으므로 스핀 코팅 등의 방법 (즉 빠른 회전을 이용하여 일정 두께로 도포하는 방법)을 이용하여 균일한 두께의 박막을 형성할 수 있다. 이때 회전 속도에 따라 도포하는 두께를 조절할 수 있으며, 물질의 점도(viscosity)나 주위 환경의 습도 등에 영향을 받을 수 있다.
이 외에 도포할 수 있는 방법으로 예를 들어 결정형 실리콘 웨이퍼를 사용할 수 있으며, 표면의 거칠기가 극도로 작아 평평한 표면을 형성할 수 있다. 예를 들어 지지층의 적어도 일면 상에 스포이드를 이용해 자외선 경화성 액상 폴리머를 일정량 뿌려준 후, 결정형 실리콘 웨이퍼를 덧대고 압착하면 균일한 도포가 이루어진다. 이때 압착하는 힘을 조절함으로써 폴리머층의 두께를 조절할 수 있다. 예를 들어 10 내지 30 Pa 압력으로 10 내지 60분 가량 압착을 하면 두께가 1 내지 10㎛의 범위로 형성된다. 이 때 압착으로 인해 실리콘과 지지층 사이에 갇힌 액상 폴리머가 잘 나올 수 있도록 유도할 수 있으며, 휴지나 기름종이 같은 것으로 흡착을 하는 것도 가능하다. 이와 같은 방법으로 도포된 폴리머층은 자외선 챔버(365 nm파장)에 넣고 UV를 예를 들어 30초 내지 5분 정도 경화시키면 얇은 박막의 형태로 형성할 수 있다.
그 밖에 PS와 같은 물질의 경우 유기용매인 톨루엔에 가용성인 바, 이를 이용하여 톨루엔에 녹인 후 스핀코팅을 통해 지지층 위에 얇게 도포하는 방법을 사용할 수 있다. 이때 도포한 이후 핫플레이트나 오븐을 이용하여 약 30 내지 80℃ 정도의 환경에서 1 내지 30분 가량 톨루엔을 증발시키면 다시 얇은 박막형태를 형성할 수 있다.
상기와 같이 단일층, 혹은 다중층의 형태로 지지체를 형성한 후, 그 위에 전도성 박막을 형성할 수 있다. 상기 전도성 박막은 통상의 증착 방법, 예를 들어 화학기상증착법(CVD), 스퍼터링, 전자총 증착법(E-gun evaporation), 열증착법(Thermal evaporation) 등의 방법을 통하여 박막 형태로 형성할 수 있다. 이러한 전도성 박막을 형성할 수 있는 금속으로써는 상술한 바와 같은 금속들을 1종 이상 사용할 수 있다. 또한 이 때 금속층의 종류뿐 아니라 두께, 같은 두께라도 증착 조건에 따른 막질의 상태에 따라 크랙이 형성되는 양상이 달라진다. 본 발명에서는 스퍼터링 방법을 통해 전기전도도가 우수한 백금 등을 사용하였으며, 증착 두께가 얇을수록 크랙형성이 용이한 성질을 이용해 소정 범위의 두께를 증착하였다. 이때 전도성 박막층이 지나치게 얇아지면 전기 특성이 나빠지므로 적당한 두께를 올리는 것이 좋다.
또한 금속을 올릴 때, 앞서 언급한 가운데 구멍이 뚫린 형태의 금속 쉐도우 마스크를 폴리머층 위에 올린 후 증착을 하면 센서의 모양을 다양하게 변형하는데 용이하다. 예를 들어 길이 방향의 필름 중앙 부분의 소정 크기를 갖는 노치를 형성할 수 있다. 이 때 노치 모양은 크랙을 형성하는 부위를 구분하기 위한 것으로 필수적인 조건은 아니다.
이와 같이 지지체 상에 전도성 박막을 형성한 후, 여기에 크랙을 형성할 수 있다. 이러한 크랙은 그레인 바운더리를 따라 형성될 수 있으나, 이에 한정되는 것은 아니며, 다양한 형태로 불규칙하게 형성될 수 있다. 하지만 외부 조건을 통해 평균적인 형태의 변화를 줄 수 있는데, 크랙을 형성하는 방법은 크게 인장 및 벤딩과 같은 물리적 방법과 식각액을 이용한 화학적 방법이 있다. 지지체가 폴리머인 경우 물리적 방법이 바람직하며 예를 들어 1 내지 10 mm 직경을 가지는 유리 막대에 필름을 감는 방법(pure bending)으로 크랙을 형성할 수 있다. 이 때 금속층의 두께 및 막질의 상태에 따라 크랙 형태가 달라질 수 있음은 당연하다.
상기 크랙 형성 방법으로서 기계적 방법인 늘림의 경우 지지체가 늘어나는 성질을 갖는 경우 유용하게 사용할 수 있으며, 지지체의 양 끝에 인장력, 즉 잡아 당기는 힘을 가함으로써 지지체 상에 존재하는 단단한 구조의 전도성 박막이 자신의 인장 한도를 벗어나는 힘을 받게 되어 크랙이 형성되게 된다. 상기 인장력이 부족한 경우 크랙의 형성이 부족할 수 있으며, 인장력이 강한 경우 전도성 박막 자체의 파손이 우려되므로 박막 두께에 따라 적절한 정도의 인장력을 가할 수 있다. 지지체가 늘어나는 성질을 갖는 경우 늘림이라는 기계적 방법 외에 구부림이라는 방법 또한 사용가능하다.
이와 같은 늘림 방법의 경우, 상기 전도성 박막의 전반에 걸쳐 고르게 크랙을 형성할 수 있다. 이때 인장력의 크기 등을 제어하여 상기 크랙의 발생 크기 및 정도 등을 적절히 제어하는 것이 가능하다. 이와 같은 크랙은 상기 인장력이 해제된 상태에서도 여전히 존재하게 되어 미세한 접합 구조체를 형성하게 된다.
상기 지지체가 늘어나는 성질을 갖지 않는 필름 형태인 경우, 상기 필름의 양쪽 끝에 인장력을 가하더라도 그 늘어나는 정도가 제한적이므로 상기 전도성 박막에 형성되는 크랙의 정도가 미미할 수 있다. 이런 경우 기계적 방법으로서 구부림 방법을 사용할 수 있다. 이와 같은 구부림 방법은 상기 전도성 박막이 구부려지는 영역에서 주로 크랙이 발생하므로 크랙이 발생하는 영역을 제어하기 용이하며, 구부림 각도 등을 제어하여 크랙의 크기, 정도, 생성 영역 등을 조절하는 것도 용이해진다.
이와 같은 방법에 의해 형성되는 크랙은 미세한 두께를 가질 수 있으며, 나노 수준의 두께, 예를 들어 0.1 내지 400nm의 범위를 가질 수 있다. 이와 같은 두께는 길이 방향으로 형성된 크랙에 존재하는 가장 큰 크랙을 기준으로 측정할 수 있다.
이와 같은 크랙의 길이나 빈도는 제한이 없으며, 사용된 박막의 크기나 가해지는 늘림이나 구부림 정도 등에 따라 달라질 수 있다. 상기 크랙의 두께나 길이 등과 같은 물리적 요소에 따라 상기 크랙에 따른 미세 접합 구조가 달라질 수 있으며, 그에 따라 이들이 나타내는 전기적 성질이 달라 수 있다.
도 2는 일구현예에 따른 크랙 함유 고감도 센서의 개략도를 나타낸다. 도 2에 도시한 바와 같이 지지체(1, 2) 상에 전도성 박막(3)이 형성되어 있으며, 상기 지지체는 베이스 필름(1)을 구비하며, 필요시 상기 베이스 필름(1) 상에는 연질 폴리머층(2)이 더 형성되어 있다. 상기 전도성 박막(3)의 양 말단은 전기적으로 서로 연결되며, 그 중간에 검출기(4)가 존재하게 된다. 상기 검출기(4)는 주로 상기 전도성 박막의 전기적 저항값을 검출하게 되는 바, 미세한 저항값을 측정해야 하므로 일반적인 전류계와 같이 직렬로 상기 전도성 박막에 연결될 수 있다.
상기 본 발명에 따른 크랙 함유 고감도 센서는 나노 수준의 크랙을 사용하여 외부 자극을 측정하므로 매우 낮은 저항을 갖는 가역적 전기 접합 센서이며, 또한 압력, 스트레인(strain), 진동(vibration)을 측정할 수 있는 다기능 센서이다. 또한 전도성 박막을 지지하는 지지체로서 플렉시블한 재료를 사용하기 때문에 휘어질 수 있는 특성을 가질 수 있다. 아울러 작은 압력과 힘에도 미세하게 반응하며, 검출기로 측정할 수 있는 압력과 힘의 범위에서 작은 변화에도 크게 반응하는 민감도를 보인다.
한편, 상기 크랙, 즉 나노 수준의 접합구조는 측정 후, 원 상태로 쉽게 복귀되므로, 반복적으로 사용하여도 측정값의 편차가 거의 존재하지 않으며, 소재 및 구조가 단순하고 저렴하여 생산이 용이한 장점을 가지고 있다. 때문에 여러 분야에 응용될 수 있다.
우선, 가역적 전기 센서에 이용될 수 있는데, 크랙이 가지는 나노 스케일의 접합구조를 이용하는 상기 크랙 함유 고감도 센서는, 매우 낮은 전기 저항값을 가지게 되며, 이를 통해 높은 감도를 얻을 수 있다. 즉, 가역적 전기접합 시스템을 갖는 상기 고감도 센서는 나노수준의 크랙면이 외부의 물리적 자극에 따라 이동하면서 접촉면적이 바뀌거나, 단락 또는 재접촉 되면서 전기적 특성이 크게 변화하게 되면서 매우 높은 감도를 나타낼 수 있으며, 예를 들어 게이지 팩터는 대략 1 내지 5 X 108의 값을 가질 수 있으며, 압력 감도는 대략 약 0.1 내지 1,000 KPa-1로 높은 수준의 감도를 가질 수 있다. 또한 플렉시블 지지체와 같은 다양한 용도에 적용이 가능하며 반복적으로 사용할 수 있는 특징이 있다.
이와 다른 분야로는 인공 피부를 예시할 수 있다. 진화 발생상 하위에 있는 생물들은 피부의 재생력이 매우 강하다. 그러나 진화 발생상 상위에 있는 생물일수록 재생력이 저하되는데, 사람의 경우에는 다른 생물에 비해 가장 약하다고 볼 수 있다. 작은 상처가 났을 경우 손상된 피부가 저절로 낫기도 하지만, 화상과 같이 심각한 손상에서는 재생이 불가능한데, 이런 경우 사용되는 것이 인공피부이다. 이와 같은 분야에서 현재 큰 이슈 중 하나는 자극을 감지할 수 있는 인공피부이다. 콜라겐 등으로 만들어지는 인공피부의 특성상 외부 자극을 감지할 수 없는데, 몸의 가장 바깥쪽에 위치하는 피부의 특성상 자극의 감지는 필수적이기 때문이다. 따라서 본 발명에 따른 고감도 센서는, 단일 전도성 박막에 존재하는 미세 접합 구조의 저항 변화를 이용하기 때문에 매우 얇게 제작할 수 있으며, 아주 작은 자극에도 반응할 수 있다는 점에서 인공 피부에 적합하다. 또한 압력, 인장뿐 아니라 진동도 동시에 인식이 가능하여 실제 피부와 유사한 성능을 발휘하며 반복적으로 자극을 감지할 수 있는 장점이 있다. 또한 플렉시블한 소재로 만들어지기 때문에 휘어질 수 있다는 점 또한 인공 피부에 적용되기 용이하다.
전도성 박막 이외에도 음성인식 시스템을 예시할 수 있다. 기존의 음성인식 시스템은 공기를 통해 전해지는 소리신호를 마이크로 인식하고 이를 음절 또는 음소 단위로 구분하여 기존의 데이터베이스와 매칭하는 방법으로 이루어지며, 조용한 환경에서 매우 높은 인식률을 보여주고 있다. 그러나 소음이 섞일 경우 화자의 음성과 소음을 구분해내는 것이 대단히 어렵고 이로 인해 인식률이 현저히 떨어지는 문제를 가지고 있다. 따라서 본 발명에 따른 고감도 진동 센서는, 피부에 부착할 경우 공기를 통해 전해지는 소음은 걸러내고 피부를 통해 전해지는 화자의 진동만을 인식하여 인식률을 현격히 높이는 장점을 가진다.
다음은 본 발명의 실시예 및 비교예를 들어 보다 구체적으로 설명하고자 한다. 다만, 하기 실시예 및 비교예는 본 발명의 예시에 불과한 것으로서 본 발명의 범위를 이들로 한정하는 것은 아니다.
실시예 1
크기 70mm X 70mm 크기의 충분히 넓은 50㎛의 두께를 가진 폴리에틸렌 테레프탈레이트(PET) 베이스 필름 위에 액상의 폴리우레탄 아크릴레이트를 도포한 후, 평평한 실리콘 웨이퍼를 올리고 2Kg 정도의 책을 올리고 30분 정도 방치하였다. 이어서, 책을 분리하고 웨이퍼가 결합된 상태로 지지층이 자외선 램프를 향하도록 한 후 365nm의 자외선을 1분 정도 조사하여 약 3㎛ 두께의 연질 폴리머층을 상기 베이스 필름 상에 형성하였다.
상기 지지체의 일면 상에 8mm X 35 mm 정도의 크기를 가지고, 중앙 부분에서 5 mm 정도의 오목한 모양의 SUS 쉐도우 마스크(두께 약 200㎛)를 덧댄 후 스퍼터를 사용하여 백금을 증착함으로써 두께 20nm의 백금 박막을 형성하였다. 이때 스퍼터는 무한진공사의 MHS-1500 모델을 사용하였으며, 증착 조건으로서 이하의 조건을 사용하였다.
Power: RF300W, Base Pressure: 3.0X10-6 Torr, Process Pressure: 5 mTorr, Distance: 140 mm, Time: 36~40 sec
이어서, 상기 마스크를 이용해 모양이 형성된 메탈 증착 베이스 필름을 마스크 모양을 따라 1mm 정도 이격하여 10 mm X 37 mm 크기의 네모난 모양으로 칼이나 가위를 이용해 잘라내었다. 이렇게 형성된 직사각형 모양의 필름을 양 말단을 잡고 앞서 언급한 중앙부의 오목한 영역을 1 mm, 2 mm, 3 mm 크기의 곡률반경을 가지는 유리 막대에 말아 상기 백금 박막에 나노 수준의 크랙을 형성하여 크랙 함유 고감도 센서를 제조하였다. 이때 텐션의 정도에 따라 크랙의 양상이 달라질 수 있으므로 가능한 순수 구부림(pure bending)을 진행하도록 하였다.
다음으로 센서의 양단에 전도성 물질로서 실버 페이스트를 바르고 전선을 연결하여 크랙 함유 고감도 센서를 제작하였다.
제조한 고감도 센서의 SEM 사진을 도 3에 도시하였다. 도 4는 상기 고감도 센서의 확대사진이며, 여기서 오목부 중앙 영역의 확대도를 도 5에 도시하였다.
도 5에 도시된 바와 같이 상기 백금 박막에 미세 크랙이 형성되었음을 알 수 있다.
도 6은 상기 백금 박막에 존재하는 미세 크랙의 AFM(원자힘 현미경) 사진이며, 이를 통해 상기 백금 박막에 나노 수준의 크랙이 형성되었음을 보다 명확히 알 수 있다.
실험예 1: 구부림 반복 실험
실시예 1에서 제조한 크랙 함유 고감도 센서를 수십 마이크로 수준의 인장을 조절할 수 있는 인장시험기(인스트론사 제품)에 양단을 고정한 후(게이지 길이 25 mm, 필름 타입이므로 게이지 마크 제거), 수축하는 방향으로 0, 2, 4, 6 mm 각 네 길이를 대하여 10,000번의 구부림을 반복하여 실시한 후, 구부림 1회, 10회, 100회, 1,000회 및 10,000회에서 저항값의 변화를 측정하여 도 7에 도시하였다. 이 때 인장시험기 양단 필름을 잡는 그립부분이 전기가 통하는 시스템이므로 이 부분에 물리는 센서의 양단 메탈층은 벗겨내었다.
상기 실험에서 저항값 수집은 센서 양단에서 나온 두 개의 전극을 검출기에 연결한 후 이 검출기를 전용 케이블을 통해 다시 컴퓨터에 연결하고 텍스트 파일 형태로 수집하였다. 이때 검출기는 네셔널 인스트루먼트사에서 제작한 PXI-4071 제품을 사용하였으며 이때 초당 샘플링 레이트는 100으로 하였다.
도 7에 도시된 그래프에서 알 수 있는 바와 같이, 10,000회의 구부림을 반복하더라도 저항값의 결과에서 큰 변화가 없음을 알 수 있다. 따라서 상기 실시예 1에 따라 제조된 고감도 센서의 경우 반복하여 사용하여도 그 크랙 구조의 변화가 거의 없음을 알 수 있다.
실시예 1에서 제조한 센서를 인장하면서 크랙면이 벌어지는 것을 측정하였으며 이를 도 8에 나타내었다. 스트레인이 가해지면서 서로 마주하는 크랙면이 벌어지게 되며 그 간격은 초기에 수 나노미터였다가 스트레인 1%에 약 60-70 nm가 되며 1.5% 스트레인의 경우에도 여전히 접촉되어 있는 크랙면이 존재함을 알 수 있다(도 8의 실선 박스 부분). 즉 스트레인이 가해 짐에 따라 접촉되어 있는 크랙면이 이동하면서 접촉면적이 바뀌거나 더 큰 스트레인이 주어지는 경우 애초에 접촉되어 있던 크랙면이 이격될 수 있음을 잘 보여준다.
실험예 2
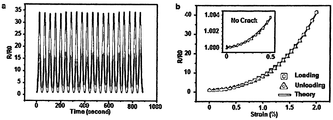
위의 센서를 인장을 가하면서 도 2와 같은 형태로 전류를 가하면서 저항의 변화를 측정하였다. 도 9는 실시예 1에서 제조된 고감도 센서에 가해지는 스트레인 변화에 따른 전기저항의 변화를 나타내는 그래프이다. 구체적으로 도 9a는 1 mm/min의 속도로 최대 2% 스트레인까지 인장하였다가 다시 원래 상태 즉 0% 스트레인 상태로 가면서 측정한 전기저항의 변화를 나타낸 것이고, 도 9b는 0.1 mm/min의 속도로 2% 스트레인까지 인장한 후에 다시 원래 상태 0% 스트레인 상태로 가면서 측정한 전기저항의 변화를 나타낸다.
도 9a에 나타낸 바와 같이 1 mm/min의 속도로 최대 2% 스트레인까지 인장하였다가 다시 원래 상태 즉 0% 스트레인 상태로 가면서 전기저항의 변화를 측정하였을 때 전기저항의 변화가 초기 저항의 35배까지 변화함을 알 수 있었으며 반복적으로 같은 형태의 저항 변화를 재현성 있게 얻을 수 있었다. 이는 서로 접촉하고 있던 크랙면이 스트레인이 가해짐에 따라 이동하면서 접촉 면적이 적어지고 결국은 이격되면서 전기 저항이 급격하게 증가하는 데에 기인하며 스트레인을 제거함에 따라 센서가 수축되면서 이격되었던 크랙면이 접촉하게 되고 접촉면적이 증가함에 따라 저항이 줄어들면서 원래 상태로 돌아온다. 도 9b는 인장 속도 0.1 mm/min으로 인장 하면서(loading) 저항의 변화를 측정한 것으로 2%에서 초기 저항의 40배 이상 증가하며 스트레인을 제거하면서 (unloading) 원래 저항 값으로 돌아오는 가역적 변화를 나타낸다. 인장 속도에 따라 저항변화가 달라지게 되고 0.1 mm/min의 경우 2% 스트레인에서 저항변화/초기저항/스트레인으로 정의 되는 센서의 감도가 2000 이 넘게 됨을 알 수 있다.
도 9b의 내부 그림은 실시예 1에서 제조된 패턴을 갖지 않는 백금 박막의 저항값의 변화를 나타내며, 크랙이 없는 백금 박막의 경우 저항변화가 미미함을 보여주고 있다. 도 9b의 theory는 이론적 모델링을 말하며 실험치와 잘 일치하고 있다.
도 10은 실시예 1에서 제조된 고감도 센서의 스트레인 변화에 따른 전도도 특성을 나타내는 그래프이다. 구체적으로 도 10은 S(초기저항 R0/저항 R)을 표시한 그래프(10a)와 전도도를 스트레인에 따라 미분한 후 음의 값을 취한 그래프(10b)를 나타낸다.
도 10a를 참조하면, 스트레인을 가할 때 크랙면과의 간격이 벌어지게 되면서 크랙 함유 박막의 전도도가 감소하게 된다. 도 10a의 내부그림은 초기 전도도의 변화를 확대한 그림이며, 전도도가 주어지는 스트레인에 따라서 수많은 변동을 나타냄을 알 수 있다. 이 변동하는 전도도를 스트레인에 따라 미분한 후 음의 값을 취하면 도 10b와 같이 나타낼 수 있다. 수많은 양의 값과 음의 값을 가지는 피크들로 나타낼 수 있으며 이 결과는 전도도가 스트레인이 가할 때 변화하는 변동으로부터 기인한다. 도 10b의 양의 값의 피크는 서로 마주하고 있으면서 애초에 접촉되었던 크랙면이 스트레인이 가해질 때 이격되는 순간을 나타내고 음의 값은 이격되었던 크랙면이 인장되는 방향에 수직 방향으로 센서가 수축되면서 다시 다른 크랙면과 재접촉하는 순간을 나타낸다. 폴리머 지지체는 포아송 비가 양의 값을 가지므로 인장되면 인장 방향에 수직 방향으로는 수축하게 된다. 양의 피크와 음의 피크의 100개의 데이터를 평균한 값을 빨간 색으로 나타내었으며 양의 값을 가지게 됨을 알 수 있으며 이는 인장이 가해지면 서로 마주하고 있는 수많은 크랙면이 이격, 재접촉되는 과정을 통하여 평균적으로는 박막의 전도도가 감소하는 결과를 보여주고 있다. 이는 인장이 가해 질 때 박막의 저항이 증가하는 도 9와 일치하는 경향을 보여주고 있다.
도 10b의 내부그림은 실시예 1에서 제조된 패턴을 갖지 않는 백금 박막의 전도도를 스트레인에 따라 미분한 후 음의 값을 취한 것을 나타낸다. 도 10b의 내부 그림은 크랙이 없는 경우를 말하며 그 크기가 크랙이 있는 경우에 비하여 매우 적음을 알 수 있다.
실시예 2
도 11에 기재한 패턴을 갖는 고감도 센서를 다음과 같이 제조하였다.
우선 크기 70mm X 70 mm 크기의 충분히 넓은 50㎛의 두께를 가진 폴리에틸렌 테레프탈레이트(PET) 베이스 필름 위에 액상의 폴리우레탄 아크릴레이트를 도포한 후 평평한 실리콘 웨이퍼를 올리고 2 Kg 정도의 책을 올리고 30분 정도 방치하였다. 이어서, 책을 분리하고 웨이퍼가 결합된 상태로 지지층이 uv램프를 향하도록 한 후 365 nm의 자외선을 1분 정도 조사하여 약 3㎛ 두께의 연질 폴리머층을 상기 베이스 필름 상에 형성하였다.
상기 지지체 상에 200㎛ 두께의 SUS 쉐도우 마스크를 덧대고 대면적으로 스퍼터를 이용해 백금을 20nm의 두께로 증착하였다. 이때 스퍼터는 무한진공사의 MHS-1500 모델을 사용하였으며, 이하의 증착 조건을 사용하였다.
Power: RF300W, Base Pressure: 3.0X10-6 Torr, Process Pressure: 5 mTorr, Distance: 140 mm, Time: 36~40초
이어서, 상기 베이스 필름의 양 말단을 잡고 중앙부의 오목한 영역을 1 mm 크기의 곡률반경을 가지는 유리막대에 말아, 상기 패턴 상에 형성된 백금 박막에 미세 크랙이 발생하도록 하였다.
상기 미세 크랙이 발생한 백금박막이 형성된 지지체 상에 200 ㎛ 두께의 SUS 쉐도우 마스크를 덧대고 대면적으로 열증착기(Thermal Evaporator)를 이용해 금 박막을 60 nm의 두께로 증착하여 제1 전극을 형성하였다. 그 위의 다시 200 ㎛ 두께의 SUS 쉐도우 마스크를 덧대고 대면적으로 열증착기를 이용해 실리카층을 200 nm의 두께로 형성하여 절연층을 형성하였다. 이후 상기 절연층 상에 다시 금 박막을 200㎛ 두께의 SUS 마스크 및 열증착기를 이용해 60 nm의 두께로 형성하여 제2 전극을 형성하였다.
이어서 실시예 1에서와 같이 제1 전극과 제2 전극 양단에 실버 페이스트를 이용해 전선을 연결하여 멀티채널 센서시스템을 제작하였다.
상기 멀티채널 시스템은 8X8 = 64개의 센서로 이루어져 있으며 각각의 센서는 고립된 형태로 주위 센서와 전기적으로 연결되어 있지 않다. 각 센서당 두 개의 전극이 필요하므로 도합 128개의 전극으로 이루어져 있다. 이를 네셔널 인스트루먼트 사에서 구입한 병렬버스에 각각 물리고 이를 다시 상기 실험예 1에서와 같이 PXI-4071 제품에 연결한 후, 이를 다시 컴퓨터에 연결하여 데이터를 수집하였다.
실험예 2
도 12에 도시한 바와 같이, 상기 실시예 2에서 제조한 고감도 센서의 소정 영역 위에 곤충 1마리(무당벌레, 0.02 g)와 무게가 비슷한 PDMS 조각을 각각 다른 위치에 올려 놓고, 상기 실시예 2에서 언급한 방법대로 검출기를 통해 64개의 센서의 압력에 따른 저항값을 측정하였다. 이때 64개의 채널은 서로 연결되어 있지 않으므로 각 채널의 값은 독립적으로 저장된다. 그 결과 도 13에 도시한 바와 같이 상기 곤충 및 PDMS 조각이 위치하는 곳에서 독립적으로 저항값이 변화되었음을 알 수 있다. 따라서, 상기 고감도 센서가 미세한 압력의 변화를 위치별로 정교하게 감지하였음을 알 수 있다.
실험예 3
상기 실시예 1에서 제조한 고감도 센서 양 끝단을 바이올린의 몸체에 양면 테이프를 이용해 고정시킨 후, 바이올린의 4개의 현을 각각 개방현으로 연주하여 상기 실험예 1과 같이 컴퓨터로 센서의 저항값을 측정하였다. 그 결과를 도 14에 도시하였다.
도 14에 도시된 바와 같이, 바이올린의 연주에 따라 특정 주파수의 진동이 발생한 경우, 상기 고감도 센서가 이를 감지하여 저항값의 변화가 감지되었으며, 그 강도 또한 감지되었음을 알 수 있다. 이때 주파수 그래프는 PXI-4071 장비를 통해 얻은 저항 데이터를 메트랩 프로그램을 이용해 푸리에 변환한 값이며 샘플링 레이트는 10000으로 하였다.
실험예 4
상기 실시예 1에서 제조한 고감도 센서를 3M 사에서 제작한 데어덤 필름으로 도 15와 같이 인체의 성대에 밀착한 후, 음식 인식 실험을 실시하였다.
음성은 영어로 "Go", "Stop", "Jump", "Shoot"와 같이 4종을 발음하였으며, 네셔널 인스트루먼트사의 PXI-4071 장치를 통해 얻어진 저항 값을 컴퓨터에 저장 후 이를 매트랩을 이용해 스펙트로그램으로 변환하였다. 이때 샘플링 레이트는 10000이며, 스펙트로그램 WINDOW는 500으로 하였다. 이를 C++ MFC 라이브러리로 학습과정을 거쳐 음성인식 모델을 만들었다. 음성인식 모델로 분석한 결과 도 16과 같이 해당 음성이 상기 고감도 센서를 통해 그대로 인식되었음을 알 수 있다.
실험예 5
도 17에 도시한 바와 같이, 상기 실시예 1에서 제조한 고감도 센서를 초소수성 표면을 가지는 슬릿 아래에 접촉시켜 위치시킨 후, 상기 표면 상에 30 mm 높이에서 3 ㎕의 물방울을 적하시켜 그 결과를 도 18에 도시하였다. 이때 동영상촬영은 초당 1,000 프래임으로 찍었다. 도 18에 도시된 바와 같이, 상기 초소수성 표면 상에서 물방울이 튀는 순간마다 상기 고감도 센서의 저항값이 변화되었음을 알 수 있다.
실험예 6
상기 실시예 1에서 제조한 고감도 센서의 양 끝단을 양면 테이프를 이용해 손목에 부착한 후, 맥박에 따른 저항값의 변화를 측정하여 도 19에 도시하였다. 이때 실리콘 오일과 같은 무극성 물질을 손목에 발라주면 접촉성이 좋아져 보다 민감한 측정 데이터를 얻을 수 있다. 도 19에 도시한 바와 같이, 맥박의 진동 및 압력을 상기 고감도 센서가 감지하여 저항값이 변화되었음을 알 수 있다.
실험예 7
도 20에 도시한 바와 같이, 힘 조절기(Force Controller, femto tools사 제품)를 사용하여 상기 실시예 1에서 제조한 고감도 센서에 2 Pa 의 압력을 가한 후, 그에 따른 저항값 변화를 측정한 결과를 도 21에 도시하였다.
도 21 및 22에 도시한 바와 같이, 상기 고감도 센서에 가해지는 압력의 변화가 그대로 저항값의 변화로 연결되었으며, 이를 통해 상기 고감도 센서에 가해지는 압력의 변화와 저항값의 변화 사이에 지연 시간이 거의 없으며, 거의 실시간으로 압력 변화가 감지되었음을 알 수 있다.
이상으로 본 발명 내용의 특정한 부분을 상세히 기술하였는바, 당업계의 통상의 지식을 가진 자에게 있어서, 이러한 구체적 기술은 단지 바람직한 실시 양태일 뿐이며, 이에 의해 본 발명의 범위가 제한되는 것이 아닌 점은 명백할 것이다. 따라서 본 발명의 실질적인 범위는 첨부된 청구항들과 그것들의 등가물에 의하여 정의된다고 할 것이다.
본 발명의 고감도 센서는 지지체의 일면 상에 크랙이 형성된 전도성 박막을 이용하여, 높은 감도로 압력 및/또는 진동을 측정할 수 있게 된다. 이와 같은 고감도 센서는 진동센서, 압력센서, 스트레인게이지 등 다양한 용도로 활용가능하며, 플렉시블한 구조체를 형성할 수 있으므로 인공피부 및 음성인식 시스템 등 다양한 용도에 활용할 수 있다.
상기 고감도 센서는 간단한 공정으로 대량 생산이 가능하므로 매우 높은 경제성을 갖는다.
Claims (16)
- 지지체; 및상기 지지체의 적어도 일면 상에 형성되는 전도성 박막;을 구비하며,상기 전도성 박막이, 서로 마주하면서 적어도 일부 면이 서로 접촉하고 있는 크랙면을 갖는 크랙을 포함하고,외부 물리적 자극에 따라 상기 크랙면이 이동하면서 접촉면적이 변화하거나 단락 혹은 재접촉되면서 전기적 저항이 변화하게 되고 이 변화를 측정함으로써 외부 자극을 측정하는 고감도 센서.
- 제1항에 있어서,상기 크랙이 상기 전도성 박막의 그레인 바운더리를 따라 형성된 것을 특징으로 하는 고감도 센서.
- 제2항에 있어서,상기 크랙이 나노 수준의 미세 크랙인 것을 특징으로 하는 고감도 센서.
- 제1항에 있어서,외부자극에 의해 상기 크랙의 전기적 단락 또는 개방이 발생하여 상기 전도성 박막의 전기적 저항값이 변화되는 것을 특징으로 하는 고감도 센서.
- 제4항에 있어서,상기 외부자극이 변위, 진동, 스트레인 및 압력 중 어느 하나 이상인 것을 특징으로 하는 고감도 센서.
- 제1항에 있어서,상기 지지체가 베이스 필름 및 그 위에 형성된 연질 폴리머층의 다중층 구조를 갖는 것을 특징으로 하는 고감도 센서.
- 제1항에 있어서,상기 전도성 박막의 두께가 0.1 nm 내지 1 ㎛ 인 것을 특징으로 하는 고감도 센서.
- 제1항에 있어서,상기 전도성 박막이 백금, 니켈, 구리, 금, 은, 철, 크롬, 마그네슘, 아연, 주석, 알루미늄, 코발트, 망간, 텅스텐, 카드뮴, 팔라듐 및 탄소 중 1종 이상의 전도성 물질 또는 이들의 1종 이상 혼합물인 것을 특징으로 하는 고감도 센서.
- 제1항에 있어서,상기 센서의 게이지 팩터가 1 내지 5X108인 것을 특징으로 하는 고감도 센서.
- 제1항에 있어서,상기 센서의 압력 감도가 0.1 내지 1,000 KPa-1인 것을 특징으로 하는 고감도 센서.
- 제1항 내지 제10항 중 어느 한 항에 따른 고감도 센서를 구비하는 압력센서.
- 제1항 내지 제10항 중 어느 한 항에 따른 고감도 센서를 구비하는 스트레인 게이지.
- 제1항 내지 제10항 중 어느 한 항에 따른 고감도 센서를 구비하는 진동센서.
- 제1항 내지 제10항 중 어느 한 항에 따른 고감도 센서를 구비하는 인공피부.
- 제1항 내지 제10항 중 어느 한 항에 따른 고감도 센서를 구비하는 음성인식 시스템.
- 지지체의 적어도 일면 상에 전도성 박막을 형성하는 단계; 및상기 전도성 박막에 크랙을 유도하는 단계;를 포함하는 제1항의 고감도 센서의 제조방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201480042994.1A CN105612588A (zh) | 2013-12-03 | 2014-12-03 | 一种具有裂纹的导电薄膜的高灵敏度传感器及其制作方法 |
| US14/895,764 US9927311B2 (en) | 2013-12-03 | 2014-12-03 | High-sensitivity sensor comprising conductive thin film containing cracks and method for manufacturing same |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2013-0149217 | 2013-12-03 | ||
| KR20130149217 | 2013-12-03 | ||
| KRPCT/KR2013/012081 | 2013-12-24 | ||
| PCT/KR2013/012081 WO2015083874A1 (ko) | 2013-12-03 | 2013-12-24 | 크랙 함유 전도성 박막을 구비하는 고감도 센서 및 그의 제조방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015084061A1 true WO2015084061A1 (ko) | 2015-06-11 |
Family
ID=53273611
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2013/012081 WO2015083874A1 (ko) | 2013-12-03 | 2013-12-24 | 크랙 함유 전도성 박막을 구비하는 고감도 센서 및 그의 제조방법 |
| PCT/KR2014/011790 WO2015084061A1 (ko) | 2013-12-03 | 2014-12-03 | 크랙 함유 전도성 박막을 구비하는 고감도 센서 및 그의 제조방법 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2013/012081 WO2015083874A1 (ko) | 2013-12-03 | 2013-12-24 | 크랙 함유 전도성 박막을 구비하는 고감도 센서 및 그의 제조방법 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9927311B2 (ko) |
| KR (2) | KR102104944B1 (ko) |
| CN (1) | CN105612588A (ko) |
| WO (2) | WO2015083874A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105627905A (zh) * | 2016-02-24 | 2016-06-01 | 清华大学 | 一种金属薄膜柔性应变传感器及其制备方法 |
| CN113776420A (zh) * | 2021-07-15 | 2021-12-10 | 中国科学院金属研究所 | 一种超灵敏柔性应变传感器的制备方法 |
Families Citing this family (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108368469A (zh) | 2015-10-07 | 2018-08-03 | 加利福尼亚大学校董会 | 石墨烯系多模态传感器 |
| KR101898604B1 (ko) * | 2015-11-30 | 2018-09-13 | 재단법인 멀티스케일 에너지시스템 연구단 | 직선으로 유도된 크랙 함유 고감도 센서 및 그의 제조 방법 |
| WO2017095097A1 (ko) * | 2015-11-30 | 2017-06-08 | 재단법인 멀티스케일 에너지시스템 연구단 | 직선으로 유도된 크랙 함유 고감도 센서 및 그의 제조 방법 |
| CN105783697B (zh) * | 2016-05-18 | 2018-08-14 | 郑州大学 | 具有裂纹结构的柔性应变传感器及其制备方法 |
| KR101840114B1 (ko) * | 2016-05-30 | 2018-03-19 | 재단법인 멀티스케일 에너지시스템 연구단 | 크랙 함유 투명 전도성 박막을 구비하는 고감도 센서 및 그의 제조 방법 |
| KR102044152B1 (ko) * | 2017-02-24 | 2019-11-13 | 성균관대학교산학협력단 | 크랙 치유 고분자를 포함하는 크랙 센서 및 이를 포함하는 전자 소자 |
| KR101810815B1 (ko) * | 2017-04-07 | 2017-12-20 | 김병삼 | 마이크로 크랙 및 레이저 타공홀을 포함하는 전파투과성 센서 커버의 제조 방법 및 이를 이용하여 제조된 전파투과성 센서 커버 |
| WO2018203658A1 (ko) * | 2017-05-02 | 2018-11-08 | 포항공과대학교 산학협력단 | 변형률 측정센서, 신체에 적용되는 변형률 측정센서를 이용한 데이터 처리 시스템 및 이를 이용한 데이터 처리 방법 |
| KR101966519B1 (ko) * | 2017-05-02 | 2019-04-05 | 포항공과대학교 산학협력단 | 신체에 적용되는 변형률 측정센서를 이용한 데이터 처리 시스템 및 이를 이용한 데이터 처리 방법 |
| CN107509303A (zh) * | 2017-07-28 | 2017-12-22 | 上海创功通讯技术有限公司 | 印刷电路板 |
| CN107551323B (zh) * | 2017-08-29 | 2018-05-25 | 北京中硕众联智能电子科技有限公司 | 基于压电材料和热敏电阻材料的人工皮肤及其检测方法 |
| KR101966541B1 (ko) * | 2017-09-13 | 2019-04-05 | 포항공과대학교 산학협력단 | 마이크로 섬유표면의 크랙 구조를 이용한 신축성 고민감도 변형률 측정 센서 및 그 제조방법 |
| CN111108357B (zh) * | 2017-09-20 | 2021-12-21 | 旭化成株式会社 | 表面应力传感器、中空构造元件以及它们的制造方法 |
| US10952642B2 (en) * | 2017-11-09 | 2021-03-23 | Amorepacific Corporation | Strain sensor unit and skin sensor module comprising the same |
| CN109986599B (zh) * | 2017-12-29 | 2020-10-02 | 北京纳米能源与系统研究所 | 摩擦电光智能皮肤、机械手及机器人 |
| KR102439437B1 (ko) * | 2017-12-29 | 2022-09-02 | 오씨아이 주식회사 | 실리콘 로드에 존재하는 크랙의 검출 방법 |
| KR102005666B1 (ko) * | 2018-01-30 | 2019-07-30 | 고려대학교 산학협력단 | 스트레인 게이지 센서 및 그 제조방법 |
| CN108387249B (zh) * | 2018-02-07 | 2020-11-10 | 山西大学 | 超高灵敏仿生柔性纳米传感器 |
| CN108267078B (zh) * | 2018-03-18 | 2020-01-14 | 吉林大学 | 一种柔性可穿戴电阻式应变传感器及其制备方法 |
| KR102192610B1 (ko) * | 2018-03-19 | 2020-12-17 | 한국과학기술원 | 물성 측정 센서 복합 구조물 |
| CN108917582A (zh) * | 2018-03-30 | 2018-11-30 | 华东理工大学 | 应变传感器及其制造方法 |
| KR102080855B1 (ko) * | 2018-05-14 | 2020-02-24 | 재단법인 멀티스케일 에너지시스템 연구단 | 중간층이 개재된 금속 박막을 이용한 크랙 기반 고감도 인장 센서 |
| CN109099832B (zh) * | 2018-08-21 | 2020-07-03 | 华东理工大学 | 应变传感器及其制造方法 |
| CN109341843B (zh) * | 2018-11-08 | 2020-03-06 | 吉林大学 | 一种微振动传感器及其制备方法 |
| KR102102696B1 (ko) * | 2018-12-27 | 2020-04-21 | 한국과학기술원 | 구부림 센서, 구부림 센서의 제조방법 및 에너지 발전 소자 |
| CN109655180B (zh) * | 2019-01-16 | 2020-07-21 | 吉林大学 | 基于裂纹阵列结构的柔性压力传感器及其制备方法 |
| KR102162145B1 (ko) * | 2019-01-31 | 2020-10-06 | 충남대학교산학협력단 | 크랙 기반의 고 민감도 굽힘 센서 제조방법 |
| KR102162135B1 (ko) * | 2019-02-08 | 2020-10-06 | 충남대학교산학협력단 | 무전해 은도금을 이용한 크랙 기반 스트레인 센서 제조방법 |
| CN110327026B (zh) * | 2019-05-16 | 2023-08-08 | 杨松 | 呼吸心跳检测装置和方法 |
| TWI711542B (zh) * | 2019-05-29 | 2020-12-01 | 瑋鋒科技股份有限公司 | 導電膜製作方法 |
| CN110346033A (zh) * | 2019-06-20 | 2019-10-18 | 重庆大学 | 一种仿蜘蛛柔性低频振动传感器 |
| KR102215926B1 (ko) * | 2019-06-28 | 2021-02-17 | 한국생산기술연구원 | 미세 균열이 형성된 스트레인 게이지의 제작방법 |
| KR102225811B1 (ko) * | 2019-08-05 | 2021-03-11 | 고려대학교 산학협력단 | 고감도 스트레인 센서 및 이의 제조방법 |
| CN110503933B (zh) * | 2019-08-06 | 2022-06-03 | 东南大学 | 一种柔性可穿戴钢琴及其实现方法 |
| KR102340399B1 (ko) | 2019-09-23 | 2021-12-16 | 고려대학교 산학협력단 | 기계적 및 전기적 특성이 조절된 나노 입자 박막 및 이의 제조방법 |
| CN111521305B (zh) * | 2020-04-03 | 2021-12-14 | 吉林大学 | 一种用于测量机械信号的仿生传感器及其制造方法 |
| US11592377B2 (en) | 2020-04-20 | 2023-02-28 | Vishay Measurements Group, Inc. | Fatigue life sensor for measuring repetitive loads applied to a structure based upon cracks propagating from crack initiation features of the sensor |
| CN111721192B (zh) * | 2020-06-30 | 2020-12-29 | 暨南大学 | 一种基于图形化诱导裂纹的应变传感器及其制备方法 |
| KR102558039B1 (ko) * | 2021-05-12 | 2023-07-20 | 성균관대학교산학협력단 | 젤라틴 및 키토산 하이드로젤을 포함하는 주파수 선택적 신호 댐퍼 및 이를 이용한 신호 측정 장치 |
| CN113310395B (zh) * | 2021-05-26 | 2022-06-14 | 苏州大学 | 微裂纹应变传感元件及其制备方法和应用 |
| KR102711756B1 (ko) * | 2021-07-05 | 2024-09-30 | 재단법인대구경북과학기술원 | 변형률 측정 센서 및 이의 제조방법 |
| CN113720255B (zh) * | 2021-08-30 | 2024-05-31 | 中国科学院宁波材料技术与工程研究所 | 基于裂纹褶皱结构的非晶碳基柔性传感器及其制备方法 |
| CN113916417B (zh) * | 2021-10-18 | 2024-06-28 | 天津科技大学 | 一种新型柔性应力传感器及其制备方法 |
| WO2024080758A1 (ko) * | 2022-10-11 | 2024-04-18 | 서울대학교산학협력단 | 옥세틱 구조 및 크랙이 형성된 전도층을 포함하는 센서 |
| CN116183068B (zh) * | 2022-12-05 | 2024-09-20 | 吉林大学 | 具有可控裂纹的高性能仿生纸基传感器及其制备方法 |
| CN115993086B (zh) * | 2023-01-10 | 2023-06-06 | 合肥工业大学 | 基于pedot:pss的柔性应变传感器及其制备方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101151662B1 (ko) * | 2010-08-23 | 2012-06-11 | 연세대학교 산학협력단 | 수소 센서 및 그 제조방법 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005106529A (ja) * | 2003-09-29 | 2005-04-21 | Hosiden Corp | 圧電型振動センサ |
| ATE403184T1 (de) * | 2003-12-01 | 2008-08-15 | Asulab Sa | Transparantes substrat mit unsichtbaren elektroden und vorrichtungen mit diesem substrat |
| KR100676088B1 (ko) * | 2005-03-23 | 2007-02-01 | (주)에스와이하이테크 | 정전용량형 습도센서 및 그 제조방법 |
| JP4144640B2 (ja) | 2006-10-13 | 2008-09-03 | オムロン株式会社 | 振動センサの製造方法 |
| US8159235B2 (en) * | 2007-09-14 | 2012-04-17 | The Regents Of The University Of Michigan | Electrical impedance tomography of nanoengineered thin films |
| JP2009216559A (ja) * | 2008-03-11 | 2009-09-24 | Hitachi-Ge Nuclear Energy Ltd | 渦電流検査装置 |
| KR101072436B1 (ko) * | 2009-12-28 | 2011-10-11 | 세종공업 주식회사 | 금속 박막형 스트레인 게이지 압력센서 |
| WO2011081308A2 (ko) | 2009-12-29 | 2011-07-07 | 연세대학교 산학협력단 | 수소 센서 및 그 제조 방법 |
| JP5841125B2 (ja) * | 2010-03-26 | 2016-01-13 | ユニバーシティ オブ ハワイ | ナノ材料で強化された樹脂および関連材料 |
| JP5486683B2 (ja) * | 2010-11-04 | 2014-05-07 | 東海ゴム工業株式会社 | 曲げセンサ |
| US20140290390A1 (en) * | 2013-04-02 | 2014-10-02 | Arizona Board of Regents, a Body Corporate of the State of Arizona, Action for and on Behalf of AZ | Systems and methods for resistive microcracked pressure sensor |
| KR101500840B1 (ko) * | 2013-06-24 | 2015-03-10 | 서울대학교산학협력단 | 변형 센서 제조 방법, 변형 센서 및 변형 센서를 이용한 움직임 감지 장치 |
-
2013
- 2013-12-24 WO PCT/KR2013/012081 patent/WO2015083874A1/ko active Application Filing
-
2014
- 2014-12-03 US US14/895,764 patent/US9927311B2/en active Active
- 2014-12-03 CN CN201480042994.1A patent/CN105612588A/zh active Pending
- 2014-12-03 WO PCT/KR2014/011790 patent/WO2015084061A1/ko active Application Filing
- 2014-12-03 KR KR1020140172484A patent/KR102104944B1/ko active IP Right Grant
-
2017
- 2017-08-11 KR KR1020170102134A patent/KR20170117000A/ko not_active Application Discontinuation
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101151662B1 (ko) * | 2010-08-23 | 2012-06-11 | 연세대학교 산학협력단 | 수소 센서 및 그 제조방법 |
Non-Patent Citations (1)
| Title |
|---|
| LEE, JAE HWAN: "A stretchable strain sensor based on metal nanoparticle thin film for human motion detector", KAIST MASTER'S THESIS : MECHANICAL ENGINEERING MAJOR, February 2013 (2013-02-01), pages 71 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105627905A (zh) * | 2016-02-24 | 2016-06-01 | 清华大学 | 一种金属薄膜柔性应变传感器及其制备方法 |
| CN113776420A (zh) * | 2021-07-15 | 2021-12-10 | 中国科学院金属研究所 | 一种超灵敏柔性应变传感器的制备方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20170117000A (ko) | 2017-10-20 |
| US20160123820A1 (en) | 2016-05-05 |
| CN105612588A (zh) | 2016-05-25 |
| US9927311B2 (en) | 2018-03-27 |
| KR102104944B1 (ko) | 2020-04-27 |
| WO2015083874A1 (ko) | 2015-06-11 |
| KR20150064707A (ko) | 2015-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2015084061A1 (ko) | 크랙 함유 전도성 박막을 구비하는 고감도 센서 및 그의 제조방법 | |
| CN105627905B (zh) | 一种金属薄膜柔性应变传感器及其制备方法 | |
| JP7168991B2 (ja) | 薄膜材料の転写方法 | |
| WO2014109619A1 (ko) | 자가점착 필름을 이용한 그래핀의 전사 방법 | |
| WO2020222529A1 (ko) | 전지셀의 사이드 테이핑 장치 | |
| WO2012008683A2 (ko) | 플렉서블 전자소자의 제조방법, 플렉서블 전자소자 및 플렉서블 기판 | |
| TW200632392A (en) | Non-photolithographic method for forming a wire grid polarizer for optical and infrared wavelengths | |
| WO2012165839A2 (ko) | 미세섬모의 인터락킹을 이용한 가역적 전기커넥터, 이를 이용한 다기능 센서 및 그 제작방법 | |
| WO2018020887A1 (ja) | ピックアップセンサおよび生体センサ | |
| WO2015183008A1 (ko) | 입자 정렬을 이용한 코팅 방법 | |
| WO2021114906A1 (zh) | 一种二维MXene基声音探测器及其制备方法和应用 | |
| CN111352295A (zh) | Euv防尘薄膜张紧的诱导应力 | |
| WO2017065530A1 (ko) | 그래핀 저온 전사방법 | |
| CN113243920A (zh) | 柔性贴附皮肤电极及其制备方法和应用 | |
| KR102200305B1 (ko) | 나노 멤브레인, 나노 멤브레인 제조방법 및 나노 멤브레인을 이용한 스피커 및 마이크로폰 장치 | |
| WO2014196776A1 (ko) | 나노박막의 전사 및 접착방법 | |
| WO2012064147A2 (ko) | 연속식 탄소나노튜브 코팅 필름 제조 장치 및 이의 탄소나노튜브 코팅 필름 제조 방법 | |
| KR101733297B1 (ko) | 금속 나노선 전극의 제조 방법 | |
| KR101684133B1 (ko) | 압력 소자 및 그 제조 방법 | |
| CN111766000A (zh) | 基于微尺度皱纹的金薄膜柔性裂纹传感器 | |
| KR102562166B1 (ko) | 계층적 강유전성 복합재를 갖는 마찰전기 센서 및 제조방법과 그 마찰전기 센서를 이용한 듀얼 모드 휴먼 머신 인터페이스를 위한 주파수 선택적 음향 센서 및 햅틱 스마트 글러브 | |
| EP4093050A1 (en) | Polymer composite piezoelectric film | |
| WO2017095097A1 (ko) | 직선으로 유도된 크랙 함유 고감도 센서 및 그의 제조 방법 | |
| CN1924548A (zh) | 一种测试电流载荷下金属薄膜屈服强度的方法 | |
| US20220146342A1 (en) | Sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14867782 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14895764 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 14867782 Country of ref document: EP Kind code of ref document: A1 |