WO2014046292A1 - 介護方法およびそれに用いる介護ロボット - Google Patents
介護方法およびそれに用いる介護ロボット Download PDFInfo
- Publication number
- WO2014046292A1 WO2014046292A1 PCT/JP2013/075960 JP2013075960W WO2014046292A1 WO 2014046292 A1 WO2014046292 A1 WO 2014046292A1 JP 2013075960 W JP2013075960 W JP 2013075960W WO 2014046292 A1 WO2014046292 A1 WO 2014046292A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- shaft
- robot
- care
- arm
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/10—Devices for lifting patients or disabled persons, e.g. special adaptations of hoists thereto
- A61G7/104—Devices carried or supported by
- A61G7/1046—Mobile bases, e.g. having wheels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/10—Devices for lifting patients or disabled persons, e.g. special adaptations of hoists thereto
- A61G7/1013—Lifting of patients by
- A61G7/1019—Vertical extending columns or mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/10—Devices for lifting patients or disabled persons, e.g. special adaptations of hoists thereto
- A61G7/1025—Lateral movement of patients, e.g. horizontal transfer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/10—Devices for lifting patients or disabled persons, e.g. special adaptations of hoists thereto
- A61G7/1025—Lateral movement of patients, e.g. horizontal transfer
- A61G7/1036—Lateral movement of patients, e.g. horizontal transfer facilitating loading and unloading of the patient, e.g. using flaps or additional tilting
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/10—Devices for lifting patients or disabled persons, e.g. special adaptations of hoists thereto
- A61G7/1049—Attachment, suspending or supporting means for patients
- A61G7/1057—Supported platforms, frames or sheets for patient in lying position
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2203/00—General characteristics of devices
- A61G2203/10—General characteristics of devices characterised by specific control means, e.g. for adjustment or steering
- A61G2203/22—General characteristics of devices characterised by specific control means, e.g. for adjustment or steering for automatically guiding movable devices, e.g. stretchers or wheelchairs in a hospital
Definitions
- the present invention relates to a care method and a care robot used therefor. More specifically, the present invention relates to a care method capable of reducing the burden on a caregiver and a care recipient and a care robot used therefor.
- caregivers such as care helpers have been supporting the lives of elderly people and persons with disabilities (hereinafter referred to as care recipients).
- care recipients In life support by a caregiver such as a care helper of a care recipient, the transfer from the bed to the wheelchair or the transfer from the wheelchair to the bed is performed when the care recipient needs assistance in the toilet or bathing.
- a caregiver such as a single care helper, and this results in a great burden on the caregiver such as a care helper.
- many caregivers such as care helpers hurt their backs.
- Low back pain has been referred to as an occupational disease of caregivers such as care helpers.
- the present invention has been made in view of the problems of the prior art, and it is an object of the present invention to provide a care method and a care robot that can simplify and reduce the burden on a caregiver such as a care helper, in particular, the burden on transfer. It is said.
- the care method of the present invention includes a procedure for laying a sheet in which a held portion to be held by a robot arm is formed on both ends on a bed, a procedure for putting a care recipient on the sheet, a robot, and a robot arm Positioning the robot relative to the care recipient, moving the robot forward toward the bed and holding the held portion by the arm, raising the arm by a predetermined amount, and And a step of retracting the robot from the bed in a state where the robot is raised by a predetermined amount.
- a procedure for increasing the height of the held portion on the head side of the care recipient to be higher than the height of the held portion on the foot side is preferably added.
- the first form of the nursing robot according to the present invention includes a base portion that can travel, first and second lifting shafts disposed on the base portion, and a U-shaped member.
- a rotating member that holds the bottom of the U-shaped member in a rotatable and non-slidable manner, and the second elevating shaft rotates the bottom of the U-shaped member in a rotatable and slidable manner;
- a movable member wherein the bottom portion is rotatably and slidably held by the rotating member of the first elevating shaft, and is rotatable and slidable by the rotating member of the second elevating shaft. It is characterized by being held.
- a care robot includes a base that is capable of traveling, a lifting shaft that is disposed on the base, a pivot that is disposed on the lifting shaft, and an axisymmetric arrangement with respect to the pivot.
- a first telescopic shaft and a second telescopic shaft provided, a first arm disposed on the first telescopic shaft, and a second arm disposed on the second telescopic shaft.
- an operation panel is provided, the operation panel has a manual operation means and a control unit, and the control unit is a position force for switching control between position control and force control.
- the second telescopic shaft drive control means for controlling the driving of the second telescopic shaft is preferably included.
- the operation panel has a robot operation button added thereto
- the control unit has a position force control switching means for switching control between position control and force control, and a lift axis drive control means for controlling the drive of the lift axis.
- a swing axis drive control means for controlling the drive of the swing axis, a first extendable axis drive control means for controlling the drive of the first extendable axis, and a second extendable axis drive control means for controlling the drive of the second extendable axis. It is more preferable that the control unit is capable of operating each means in response to a signal from the robot operation button.
- a head side indicating means for indicating whether the position of the head of the caregiver is on the right side or the left side of the care robot is added, and the turning axis drive control means is provided with a turning angle limiter. And the turning angle limiting portion is provided by the head side indicating means. It is further preferable to limit the turning angle so that the head of the care recipient is not positioned below the horizontal in response to the number, or the operation panel is provided with manual automatic switching means and operation pattern selection means. It is further preferable that the control unit includes an operation pattern holding unit. Moreover, in the 2nd form of the care robot of this invention, it is preferable that a 1st arm and a 2nd arm are made into the rod shape.
- the base has a running part
- the running part has a front wheel support member
- the front wheel support member has a rear slope with a front horizontal part and an upward slope. It is preferable to have a part.
- the present invention is configured as described above, when the care recipient is transferred from the bed to a wheelchair or the like, it is not necessary for the caregiver to lift the care recipient from the bed, thereby reducing the burden on the caregiver. There is an excellent effect.
- FIG. 1 is a schematic view showing a care procedure according to the care method of the present invention.
- FIG. 2 is a perspective view of the care robot according to Embodiment 1 of the present invention.
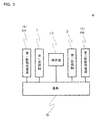
- FIG. 3 is a block diagram of the robot.
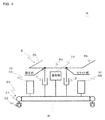
- FIG. 4 is a schematic view of the robot.
- FIG. 5 is a schematic view of an example of a U-shaped member holding portion, in which FIG. 5A shows a fixed portion and FIG. 5B shows a slide portion.
- FIG. 6 is a block diagram of the operation panel.
- FIG. 7 is a two-side view of the dedicated sheet.
- FIG. 8 is a schematic cross-sectional view of a modified example of the held portion of the dedicated sheet.
- FIG. 9 is a skeleton diagram of a care robot according to Embodiment 2 of the present invention.
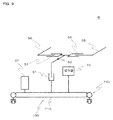
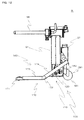
- FIG. 10 is a perspective view of the robot.
- FIG. 11 is a plan view of the robot.
- FIG. 12 is a right side view of the robot.
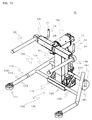
- FIG. 13 is a rear view of the robot.
- FIG. 14 is a plan view of the robot.
- FIG. 15 is a block diagram of the operation panel.
- FIG. 16 is a block diagram of the operation lever.
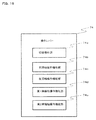
- FIG. 17 is a block diagram of an operation panel of a nursing robot according to Embodiment 3 of the present invention.
- FIG. 18 is a schematic view of a state in which two nursing robots equipped with makeup covers are automatically operated to face each other.
- the care method of the present invention supports the transfer of a care recipient who is sleeping on a bed to a wheelchair or the like by a care robot according to the following procedure. That is, transfer to a wheelchair or the like is performed by a transfer support robot (care robot). The following operations are performed by a caregiver.
- Step 1 The care recipient who is sleeping on the bed is changed the position on the bed in the opposite direction to the entrance side of the transfer support robot (hereinafter simply referred to as the robot), that is, the entire body is half-raised. A special sheet is placed near the end (see FIG. 1A).
- Step 2 Return the position of the care recipient to the original position and place the care recipient in the dedicated sheet, and then advance the robot to enter the bed and hold the dedicated sheet with the arm (arm) (FIG. 1 (b) )reference).
- Step 3 Lift the special sheet. That is, the care recipient is lifted from the bed (see FIG. 1C).
- Procedure 4 The robot is moved backward to move the care recipient to the side of the bed (see FIG. 1 (d)). By doing so, the burden on the caregiver such as a care helper when the care recipient is transferred from the bed to a wheelchair or the like is reduced.
- Embodiment 1 As shown in FIGS.
- the robot R has a base B that is allowed to run in the front-rear direction, a first lifting shaft 1 that is erected on the base B, and a first lifting shaft 1 that is fixed to the base B.
- the second elevating shaft 2 erected with an interval of, the main rotating member 3 mounted on the upper end portion of the first elevating shaft 1, and the follower rotating mounted on the upper end portion of the second elevating shaft 2
- Main components are a member 4, a U-shaped member 5 that is slidably attached to the main rotating member 3 and slidably attached to the sub-rotating member 4, a driving power source 6, and an operation panel 10. It is supposed to be prepared as an element. As shown in FIG. 2 and FIG.
- the base B has travel members 20 mounted in parallel at both ends, and can travel in the front-rear direction by the travel members 20.
- the traveling member 20 is configured such that traveling wheels 22 are attached to both ends of a pipe 21 with caps attached to both ends.
- the traveling wheel 22 may be mounted on the pipe 21 so as to be turnable. By doing so, the robot R can run not only forward and backward but also left and right.
- shaft 2 shall consist of an electric cylinder, for example.
- the U-shaped member 5 includes a bottom portion 5a and an arm 5b protruding from the bottom portion 5a, and the bottom portion 5a is held by the main rotating member 3 and the sub-rotating member 4 as described above. Further, the distance between the arms 5b and 5b is made to coincide with the distance between the held parts 31 (see FIG. 7) provided at the end of the dedicated sheet 30.
- FIG. 5 shows an example of the fixed portion and the slide portion. In the fixed portion, the bottom portion 5a is gripped by the grip portion 3a of the main rotating member 3 attached to the upper end portion of the first elevating shaft 1, as shown in FIG. On the other hand, in the slide portion, as shown in FIG.
- the driving power source 6 is, for example, a battery, which makes the robot R so-called cordless.
- the driving power source 6 includes a first driving power source 6A for driving the first lifting shaft 1 and a second driving power source 6B for driving the second lifting shaft 2.
- the first lifting shaft 1 And the first driving power source 6A are electrically connected, and the second lifting shaft 2 and the second driving power source 6B are electrically connected. As shown in FIG.
- the operation panel 10 includes a first drive power switch 11 that turns on and off the first drive power supply 6A, a second drive power switch 12 that turns on and off the second drive power supply 6B, A first raising button 13 that raises the lifting shaft 1, a first lowering button 14 that lowers the first lifting shaft 1, a second lifting button 15 that raises the second lifting shaft 2, and a second lifting shaft And a second lowering button 16 for lowering 2.
- the operation panel 10 is disposed, for example, behind an intermediate portion between the first lifting shaft 1 and the second lifting shaft 2.
- FIG. 7 shows an example of the dedicated sheet 30. As shown in FIG. 7, the dedicated sheet 30 has cylindrical held portions 31 into which the arms 5 b of the robot R are inserted at both ends.
- the held portion 31 includes a base material 32, a cushion layer 33 made of a cushioning material disposed outside the base material 32, and a surface layer 34 made of a synthetic resin sheet.
- Procedure 11 The robot R is moved as appropriate, and the arms 5b and 5b of the U-shaped member 5 are aligned with the positions of the held portions 31 provided at both ends of the dedicated sheet 30. In this case, the robot R is positioned so that the first lifting shaft 1 is close to the head of the care recipient.
- Step 12 The buttons on the operation panel 10 are appropriately pressed so that the arms 5b and 5b of the U-shaped member 5 are held at both ends of the dedicated sheet 30 where the care recipient needs to lie down.
- Procedure 13 The robot R is advanced and both arms 5b, 5b of the U-shaped member 5 are inserted into held portions 31, 31 provided at both ends of the dedicated sheet 30, respectively.
- Procedure 14 The first raising button 13 and the second raising button 15 are pressed to bring both arms 5b, 5b of the U-shaped member 5 to a predetermined height from the bed.
- Step 15 The robot R is moved backward to release the robot R from the bed. That is, the care recipient is moved to the bedside.
- Step 16 With the caregiver positioned on the feet of the care recipient, the first raising button 13 is appropriately pressed to raise the head of the care recipient and leave the caregiver with the caregiver.
- Step 17 The caregiver transfers the care recipient in, for example, a wheelchair.
- Embodiment 2 9 to 14 show a robot R according to Embodiment 2 of the present invention. As shown in FIGS.
- the robot R includes a base 100 that can be freely moved, a lifting shaft 51 that is erected on the base 100, a turning shaft 52 that is attached to the upper end of the lifting shaft 51, A first telescopic shaft 53 and a second telescopic shaft 54 that are mounted symmetrically at the tip of the pivot shaft 52, and a rod-shaped first arm that protrudes forward from the tip of the first telescopic shaft 53 ( A right arm) 55, a rod-like second arm (left arm) 56, which is arranged to protrude forward from the tip of the second telescopic shaft 54, a drive power source 57, and an operation panel 70 as main components. It is supposed to be.
- the robot R travels by pushing and pulling the robot R while holding the manual operation levers 74 and 74.
- the base portion 100 includes a placement portion 110 disposed in the central portion, and a traveling portion 160 disposed on both sides of the placement portion 110.
- the mounting unit 110 includes a mounting member 120 disposed in the central portion and a horizontal support member 130 disposed in the left-right direction that supports the mounting member 120.
- the traveling unit 160 includes a front traveling unit 170 and a rear traveling unit 180.
- the front traveling unit 170 includes a front wheel 171 and a front wheel support member 172 that supports the front wheel 171
- the rear traveling unit 180 includes a rear wheel 181 and a rear wheel support member 182 that supports the rear wheel 181. It is supposed to be.
- the front wheel support member 172 and the rear wheel support member 182 are joined to the horizontal support member 130 through appropriate means. Further, the diameter of the front wheel 171 is smaller than the diameter of the rear wheel 181.
- the mounting portion 110 more specifically, the mounting member 120, is provided with a lifting shaft 51, a driving power source 57, an operation panel 70, and the like.
- the front wheel support member 172 includes a front horizontal portion 173 and a rear inclined portion 174 having an upward slope, and a front wheel 171 is attached to the tip of the horizontal portion 173. Since the front wheel 171 has a small diameter and the front wheel support member 172 is configured as described above, the front traveling portion 170 can be submerged under the bed.
- the elevating shaft 51 is made of, for example, an electric cylinder.
- the turning shaft 52 is made of, for example, an electric servo motor.
- the first telescopic shaft 53 and the second telescopic shaft 54 are made of, for example, an electric cylinder.
- the driving power source 57 is a battery, for example. As shown in FIG.
- the operation panel 70 includes a robot operation button 71, a head side instruction lever 72 that indicates whether the position of the head of the care recipient is the right side or the left side of the robot R, A switch 73, a manual operation lever (manual operation means) 74, and a control unit 80 are provided.
- the robot operation button 71 is provided on the top of a manual operation lever 74 provided on each of the right cover CR covering the first telescopic shaft 53 and the left cover CL covering the second telescopic shaft 54. Yes.
- the robot operation button 71 enables the robot R to operate only when both buttons 71 and 71 are pressed simultaneously from the viewpoint of fail-safe. As shown in FIG.
- the manual operation lever 74 includes a switching function unit 74 a that switches the position force control switching unit 81 that switches between position control and force control, and a lifting shaft operation function unit 74 b that drives the lifting shaft 1.
- a swing axis operation function unit 74c for driving the swing axis 2 a first extension shaft operation function unit 74d for driving the first extension shaft 53, and a second extension shaft operation function unit 74e for driving the second extension shaft 54.
- Each functional unit is realized by adjusting the angle and inclination of the lever.
- the control unit 80 includes a position force control switching unit 81 that switches between position control and force control, a lift shaft drive control unit 82 that controls the drive of the lift shaft 51, and a swing axis drive that controls the drive of the swing shaft 52.
- the control unit 83, the first telescopic shaft drive control unit 84 for controlling the driving of the first telescopic shaft 53, the second telescopic shaft drive control unit 85 for controlling the driving of the second telescopic shaft 54, and the respective units are integrated. And a supervising section 86 that performs the above. For example, when the robot operation buttons 71 and 71 are being pressed, the general unit 86 responds to the operation of each means, for example, the turning operation of the turning shaft 52, the extending and retracting operation of the extension shafts 53 and 54, and the raising and lowering of the lifting shaft 51. It is assumed that the control that enables the operation is performed.
- the turning shaft drive control means 83 has a turning angle limiting portion 83a that restricts the turning angle of the turning shaft 52 in response to a signal from the head side instruction lever 72.
- the turning angle restriction unit 83a restricts the turning angle of the turning shaft 52 so that the head of the care recipient is not positioned below the horizontal.
- the control part 80 which has this function is implement
- Procedure 2 The lifting / lowering axis operation function unit 74b is operated by lever operation while pressing the robot operation buttons 71 and 71, and the lifting / lowering axis 51 is appropriately driven to set the heights of the right arm 55 and the left arm 56 to the held portion of the dedicated seat 30. 31 is the height position.
- Step 3 The first telescopic shaft 53 and the second telescopic shaft 54 are appropriately operated by causing the first telescopic shaft operation function unit 74d and the second telescopic shaft operation function unit 74e to function by lever operation while pressing the robot operation buttons 71, 71. Driven so that the right arm 55 and the left arm 56 face the held portions 31, 31, respectively.
- Procedure 4 The robot R is advanced and the right arm 55 and the left arm 56 are inserted into the held portions 31 and 31 of the dedicated sheet 30, respectively.
- Procedure 5 The head side instruction lever 72 is used to indicate the side of the head of the care recipient. That is, it indicates whether the head of the care recipient is on the right side or the left side of the robot R.
- Procedure 8 The lifting / lowering axis operation function unit 74b is operated by lever operation while pressing the robot operation buttons 71 and 71, and the lifting / lowering axis 51 is appropriately driven to bring the dedicated seat 30 to a predetermined height from the bed. In other words, the care recipient is lifted from the bed.
- Procedure 9 The switching function unit 74a is operated by lever operation while pressing the robot operation buttons 71, 71 to switch the robot R from position control to force control.
- Procedure 10 The robot R is moved backward and the care recipient is moved to the bedside.
- Procedure 11 The switching function unit 74a is operated by lever operation while pressing the robot operation buttons 71, 71 to switch the robot R from force control to position control.
- Step 12 While turning the robot operation buttons 71 and 71, the turning axis operation function unit 74c is operated by lever operation to drive the turning axis 52 to raise the head of the care recipient while lowering the toes.
- Step 13 The robot R is switched from position control to force control by causing the switching function unit 74a to function by lever operation while pressing the robot operation buttons 71, 71. After making the posture of the care recipient in this way, the caregiver transfers the care recipient to a wheelchair or the like.
- the robot R of this embodiment it is not necessary for the caregiver to lift the care recipient from the bed, and the burden on the caregiver is reduced. For example, low back pain called a caregiver's occupational disease can be eliminated.
- FIG. 17 shows an operation panel 70A for a robot according to Embodiment 3 of the present invention.
- the third embodiment is a modification of the second embodiment, and is configured so that an operation by manual operation and an operation by automatic control can be performed. That is, as shown in FIG.
- the operation panel 70A includes a manual automatic switching lever (manual automatic switching means) 75, an operation pattern selection button (operation pattern selection means) 76, and a control. It is assumed that an operation pattern holding unit 88 is added to the unit 80. Hereinafter, the automatic operation will be described.
- the manual automatic switching lever 75 is switched to automatic and one of the operation pattern selection buttons 76 is pressed to select an automatic operation pattern, the corresponding pattern held in the automatic operation pattern holding unit 88 is called and the pattern is called.
- the robot R performs the operation according to the above.
- the first telescopic shaft 53 and the second telescopic shaft 54 are appropriately driven to cause the first telescopic shaft 53 and the second telescopic shaft 54 to expand and contract as appropriate while the swivel shaft 52 is swung.
- the robot R By causing the robot R to perform such an operation, it appears as if the robot R is dancing and gives a healing effect to the care recipient.
- FIG. 18 shows a state in which two robots R having a decorative cover are arranged to face each other and are automatically operated. By doing so, it gives the impression that the robots R and R are dressed up, and the healing effect is increased.
- a trumpet-shaped guide portion 32 a may be formed on the side where the arm 5 b of the robot R of the held portion 31 of the dedicated sheet 30 is inserted.
- power is generated by a battery held by the robot, but power may be supplied from a commercial power source by a cord.
- the present invention can be applied to the robot industry and the nursing care business.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nursing (AREA)
- Invalid Beds And Related Equipment (AREA)
Description
しかるに、かかる移乗は、通常、一人の介護ヘルパーなどの介護者によりなされているところから、介護ヘルパーなどの介護者に多大の負担を強いる結果となっている。そのため、介護ヘルパーなどの介護者には、腰を痛める者が多数に上っている。腰痛は介護ヘルパーなどの介護者の職業病とまでいわれるようになってきている。
このため、介護関係者から介護ヘルパーなどの介護者の負担、とりわけ移乗の際の負担を軽減できる介護方法および介護ロボットが熱望されている。
なお、特許文献1には、介護用キャリアの提案がなされているが、構成が複雑であるため、操作性に難点があるという問題がある。
本発明の介護方法においては、要介護者の頭部側の被保持部の高さを足元側の被保持部の高さよりも高くする手順が付加されているのが好ましい。
本発明の介護ロボットの第1形態は、走行可能とされた基部と、前記基部に配設された第1および第2昇降軸と、U字状部材とを備え、前記第1昇降軸は、前記U字状部材の底部を回動可能かつスライド不自在に保持する回動部材を有し、前記第2昇降軸は、前記U字状部材の底部を回動可能かつスライド自在に保持する回動部材を有し、前記底部が、前記第1昇降軸の回動部材に回動可能かつスライド不自在に保持され、かつ、前記第2昇降軸の回動部材に回動可能かつスライド自在に保持されてなることを特徴とする。
本発明の介護ロボットの第1形態においては、第1昇降軸に電力を供給する第1電源と、第2昇降軸に電力を供給する第2電源とが基部に配設されてなるのが好ましい。
また、本発明の介護ロボットの第1形態においては、第1昇降軸と第2昇降軸との昇降を操作する操作盤が基部に配設されてなるのが好ましい。その場合、操作盤が第1昇降軸と第2昇降軸との中間部の後ろに配設されてなるのがさらに好ましい。
本発明の介護ロボットの第2形態は、走行可能とされた基部と、前記基部に配設された昇降軸と、前記昇降軸に配設された旋回軸と、前記旋回軸に軸対称に配設された第1伸縮軸および第2伸縮軸と、前記第1伸縮軸に配設された第1腕と、前記第2伸縮軸に配設された第2腕とを備えてなることを特徴とする。
本発明の介護ロボットの第2形態においては、操作盤を備え、前記操作盤は、マニュアル操作手段と制御部とを有し、前記制御部は、位置制御と力制御とに制御を切り替える位置力制御切替手段と、昇降軸の駆動を制御する昇降軸駆動制御手段と、旋回軸の駆動を制御する旋回軸駆動制御手段と、第1伸縮軸の駆動を制御する第1伸縮軸駆動制御手段と、第2伸縮軸の駆動を制御する第2伸縮軸駆動制御手段とを含んでなるのが好ましい。その場合、操作盤は、ロボット動作ボタンを付加して有し、制御部は、位置制御と力制御とに制御を切り替える位置力制御切替手段と、昇降軸の駆動を制御する昇降軸駆動制御手段と、旋回軸の駆動を制御する旋回軸駆動制御手段と、第1伸縮軸の駆動を制御する第1伸縮軸駆動制御手段と、第2伸縮軸の駆動を制御する第2伸縮軸駆動制御手段とを統括する統括部を付加して有し、前記統括部は、前記ロボット動作ボタンからの信号に応答して前記各手段の動作を可能とするのがさらに好ましく、また、操作盤は、要介護者の頭部の位置が介護ロボットの右側であるか左側であるかを指示する頭部サイド指示手段を付加して有し、旋回軸駆動制御手段は、旋回角制限部を付加して有し、前記旋回角制限部は、前記頭部サイド指示手段からの信号に応答して要介護者の頭部が水平より下方に位置しないように旋回角を制限するのもさらに好ましく、あるいは、操作盤は、マニュアル自動切替手段と動作パターン選択手段とを付加して有し、制御部は、動作パターン保持部を含むのもさらに好ましい。
また、本発明の介護ロボットの第2形態においては、第1腕および第2腕が棒状とされてなるのが好ましい。
また、本発明の介護ロボットの第2形態においては、駆動用電源を備えてなるのが好ましい。
また、本発明の介護ロボットの第2形態においては、化粧カバーが装着されてなるのが好ましい。
また、本発明の介護ロボットの第2形態においては、基部が走行部を有し、前記走行部が前輪支持部材を有し、前記前輪支持部材が前部水平部と上り勾配とされた後部傾斜部を有してなるのが好ましい。
図2は本発明の実施形態1に係る介護ロボットの斜視図である。
図3は同ロボットのブロック図である。
図4は同ロボットの概略図である。
図5はU字状部材の保持部の一例の概略図であって、同(a)は固定部を示し、同(b)はスライド部を示す。
図6は操作盤のブロック図である。
図7は専用シートの二面図である。
図8は専用シートの被保持部の変形例の概略断面図である。
図9は本発明の実施形態2に係る介護ロボットのスケルトン図である。
図10は同ロボットの斜視図である。
図11は同ロボットの平面図である。
図12は同ロボットの右側面図である。
図13は同ロボットの背面図である。
図14は同ロボットの平面図である。
図15は操作盤のブロック図である。
図16は操作レバーのブロック図である。
図17は本発明の実施形態3に係る介護ロボットの操作盤のブロック図である。
図18は化粧カバーが装着された介護ロボット二基を対向させて自動動作させている状態の概略図である。
概要
本発明の介護方法は、介護ロボットにより概略次のような手順によりベッドに寝ている要介護者の車椅子などへの移乗を支援するものである。つまり、車椅子などへの移乗を移乗支援ロボット(介護ロボット)によりなすものである。なお、以下の操作は介護者によりなされるものとされる。
手順1:ベッドに寝ている要介護者を当該ベッドの上で移乗支援ロボット(以下、単にロボットという)の進入側と反対方向に体位変換をさせ、つまり体全体を半分起こした状態としてベッドの端付近に専用シートを敷く(図1(a)参照)。
手順2:要介護者の体位を元に戻して要介護者を専用シートに寝かせた後、ロボットを前進させてベッドに進入させ、そのアーム(腕)で専用シートを保持する(図1(b)参照)。
手順3:専用シートを持ち上げる。つまり、要介護者をベッドから浮かせる(図1(c)参照)。
手順4:ロボットを後退させて要介護者をベッド脇に移動させる(図1(d)参照)。
しかして、このようにすることにより、要介護者をベッドから車椅子などへ移乗する際における介護ヘルパーなどの介護者の負担が軽減される。
以下、図を参照しながら、ロボットの構成について説明する。
実施形態1
ロボットRは、図2~図5に示すように、前後方向に走行自在とされた基部Bと、基部Bに立設された第1昇降軸1と、基部Bに第1昇降軸1に一定の間隔を設けて立設された第2昇降軸2と、第1昇降軸1の上端部に装着された主回動部材3と、第2昇降軸2の上端部に装着された従回動部材4と、主回動部材3にスライド不自在に装着され、かつ従回動部材4にスライド自在に装着されたU字状部材5と、駆動用電源6と、操作盤10とを主要構成要素として備えてなるものとされる。
基部Bは、図2および図4に示すように、両端部に走行部材20が平行に装着され、同走行部材20により前後方向に走行可能とされている。走行部材20は、両端部にキャップが装着されたパイプ21の両端部に走行車輪22が装着されてなるものとされる。
なお、走行車輪22は、パイプ21に旋回自在に装置されてもよい。そうすることにより、ロボットRは前後のみならず左右にも走行可能とされる。
第1昇降軸1および第2昇降軸2は、例えば電動シリンダーからなるものとされる。
U字状部材5は、底部5aと底部5aから突出させられている腕5bとを含むものとされ、底部5aは主回動部材3および従回動部材4に前述したよう保持されている。また、両腕5b,5bの間隔は、専用シート30の端部に設けられている被保持部31(図7参照)の間隔と一致させられている。
図5に、固定部およびスライド部の一例を示す。固定部においては、底部5aは図5(a)に示すように、第1昇降軸1の上端部に装着された主回動部材3の把持部3aにより把持されてスライド不自在とされる。一方、スライド部においては、底部5aは図5(b)に示すように、第2昇降軸2の上端部に装着された従回動部材4のスライド部4aに挿通させてスライド自在とされる。なお、図中、符号4bはローラーベアリングを示す。
駆動用電源6は、例えばバッテリーとされ、これによりロボットRをいわゆるコードレスとすることができる。また、駆動用電源6は、第1昇降軸1を駆動する第1駆動用電源6Aと、第2昇降軸2を駆動する第2駆動用電源6Bとを含むものとされ、第1昇降軸1と第1駆動用電源6Aとは電気的に接続され、第2昇降軸2と第2駆動用電源6Bとは電気的に接続されている。
操作盤10は、図6に示すように、第1駆動用電源6Aをオンオフする第1駆動用電源スイッチ11と、第2駆動用電源6Bをオンオフする第2駆動用電源スイッチ12と、第1昇降軸1を上昇させる第1上昇用ボタン13と、第1昇降軸1を下降させる第1下降用ボタン14と、第2昇降軸2を上昇させる第2上昇用ボタン15と、第2昇降軸2を下降させる第2下降用ボタン16とを有するものとされる。操作盤10は、例えば、第1昇降軸1と第2昇降軸2との中間部の後ろに配設される。
図7に、専用シート30の一例を示す。
専用シート30は、図7に示すように、両端にロボットRの腕5bが挿入される円筒状の被保持部31を有するものとされる。
被保持部31は、基材32と基材32の外側に配設されたクッション性を有する素材からなるクッション層33と、合成樹脂シートからなる表層34とからなるものとされる。
次に、かかる構成とされたロボットRによる要介護者の移乗について説明する。
手順11:ロボットRを適宜移動させ、U字状部材5の両腕5b,5bを専用シート30の両端部に設けられた被保持部31の位置に位置合わせする。この場合、第1昇降軸1が要介護者の頭に近くなるようロボットRの位置合わせをする。
手順12:操作盤10のボタンを適宜押下してU字状部材5の両腕5b,5bの高さを、要介護者が寝かさせている専用シート30の両端部に設けられた被保持部31,31の高さに合わせる。
手順13:ロボットRを前進させてU字状部材5の両腕5b,5bをそれぞれ専用シート30の両端部に設けられた被保持部31,31に挿入する。
手順14:第1上昇用ボタン13および第2上昇用ボタン15を押下してU字状部材5の両腕5b,5bをベッドから所定の高さとする。
手順15:ロボットRを後退させてロボットRをベッドから離す。つまり、要介護者をベッド脇に移動させる。
手順16:介護者を要介護者の足元側に位置させた状態で、第1上昇用ボタン13を適宜押下して要介護者の頭を高くするとともに、要介護者を介護者に預ける。
手順17:介護者は要介護者を、例えば車椅子に移乗させる。
このように、本実施形態のロボットRによれば、介護者が要介護者をベッドから持ち上げる必用がなくなり、介護者の負担が軽減される。例えば、介護者の職業病と称される腰痛の解消が図られる。
実施形態2
図9~図14に、本発明の実施形態2に係るロボットRを示す。
ロボットRは、図9~図14に示すように、走行自在とされた基部100と、基部100に立設された昇降軸51と、昇降軸51の上端部に装着された旋回軸52と、旋回軸52の先端部に軸対称に装着された第1伸縮軸53および第2伸縮軸54と、第1伸縮軸53の先端部に前方に突出させて配設された棒状の第1腕(右腕)55と、第2伸縮軸54の先端部に前方に突出させて配設された棒状の第2腕(左腕)56と、駆動用電源57と、操作盤70とを主要構成要素として備えてなるものとされる。なお、ロボットRの走行は、マニュアル操作レバー74,74を把持しながらロボットRを押し引きすることによりなされる。
基部100は、中央部に配設された載置部110と、載置部110の両脇に配設された走行部160とを含むものとされる。より具体的には、載置部110は、中央部に配設された載置部材120と、載置部材120を支持する左右方向に配設された水平支持部材130とを含むものとされる。また、走行部160は前部走行部170と後部走行部180とを含むものとされる。前部走行部170は、前輪171と前輪171を支持する前輪支持部材172とを含むものとされ、後部走行部180は、後輪181と後輪181を支持する後輪支持部材182とを含むものとされる。そして、前輪支持部材172および後輪支持部材182は、それぞれ適宜手段を介して水平支持部材130と接合されている。また、前輪171の径は後輪181の径より小さくされている。
載置部110、より具体的には載置部材120には、昇降軸51、駆動用電源57、操作盤70などが配設されている。
前輪支持部材172は、前部の水平部173と、後部の上り勾配とされた傾斜部174とを含むものとされ、水平部173の先端に前輪171が装着されている。前輪171の径が小径とされ、かつ、前輪支持部材172がかかる構成とされていることから、前部走行部170をベッドの下に潜り込ませることができる。なお、前輪支持部材172のその余の構成および後輪支持部材182の構成は、車輪の支持に用いられている公知の構成を好適に用いることができる。
昇降軸51は、例えば電動シリンダーからなるものとされる。
旋回軸52は、例えば電動サーボモータからなるものとされる。
第1伸縮軸53および第2伸縮軸54は、例えば電動シリンダーからなるものとされる。
駆動用電源57は、例えばバッテリーとされる。
操作盤70は、図15に示すように、ロボット動作ボタン71と、要介護者の頭部の位置がロボットRの右側であるか左側であるかを指示する頭部サイド指示レバー72と、電源スイッチ73と、マニュアル操作レバー(マニュアル操作手段)74と、制御部80とを有するものとされる。
ロボット動作ボタン71は、第1伸縮軸53をカバーしている右側カバーCRおよび第2伸縮軸54をカバーしている左側カバーCLのそれぞれに設けられているマニュアル操作レバー74の頂部に設けられている。ロボット動作ボタン71は、フェールセーフの観点から、両方のボタン71,71が同時に押下されている間のみロボットRを動作可能とするものである。
マニュアル操作レバー74は、図16に示すように、位置制御と力制御とを切り替える位置力制御切替手段81の切り替えをなす切替機能部74aと、昇降軸1を駆動する昇降軸操作機能部74bと、旋回軸2を駆動する旋回軸操作機能部74cと、第1伸縮軸53を駆動する第1伸縮軸操作機能部74dと、第2伸縮軸54を駆動する第2伸縮軸操作機能部74eとを含むものとされ、レバーの角度や傾斜を調整することにより各機能部が実現される。
制御部80は、位置制御と力制御との切り替えをなす位置力制御切替手段81と、昇降軸51の駆動を制御する昇降軸駆動制御手段82と、旋回軸52の駆動を制御する旋回軸駆動制御手段83と、第1伸縮軸53の駆動を制御する第1伸縮軸駆動制御手段84と、第2伸縮軸54の駆動を制御する第2伸縮軸駆動制御手段85と、前記各手段を統括する統括部86とを有するものとされる。統括部86は、例えばロボット動作ボタン71,71が押下中、その信号に応答して前記各手段の動作、例えば旋回軸52の旋回動作、伸縮軸53,54の伸縮動作、昇降軸51の昇降動作を可能とする制御をなすものとされる。
旋回軸駆動制御手段83は、頭部サイド指示レバー72からの信号に応答して旋回軸52の旋回角度を制限する旋回角制限部83aを有するものとされる。ここで、旋回角制限部83aは、要介護者の頭部が水平より下方に位置しないように旋回軸52の旋回角を制限する。
なお、かかる機能を有する制御部80は、例えば、コンピュータに前記機能を実現させるプログラムを格納することにより実現される。
次に、かかる構成とされたロボットRによる要介護者の移乗について説明する。
手順1:ロボットRを適宜移動させ、専用シート30に寝かされている要介護者に対向させる。
手順2:ロボット動作ボタン71,71を押下しながらレバー操作により昇降軸操作機能部74bを機能させて昇降軸51を適宜駆動して右腕55および左腕56の高さを専用シート30の被保持部31の高さ位置とする。
手順3:ロボット動作ボタン71,71を押下しながらレバー操作により第1伸縮軸操作機能部74dおよび第2伸縮軸操作機能部74eを機能させて第1伸縮軸53および第2伸縮軸54を適宜駆動して右腕55および左腕56をそれぞれ被保持部31,31に対向させる。
手順4:ロボットRを前進させて右腕55および左腕56をそれぞれ専用シート30の被保持部31,31に挿入する。
手順5:頭部サイド指示レバー72により要介護者の頭部のサイドを指示する。つまり、要介護者の頭部がロボットRの右側であるか左側であるかを指示する。
手順8:ロボット動作ボタン71,71を押下しながらレバー操作により昇降軸操作機能部74bを機能させて昇降軸51を適宜駆動して専用シート30をベッドから所定高さとする。つまり、要介護者をベッドから浮かせる。
手順9:ロボット動作ボタン71,71を押下しながらレバー操作により切替機能部74aを機能させてロボットRを位置制御から力制御に切り替える。
手順10:ロボットRを後退させて要介護者をベッド脇に移動させる。
手順11:ロボット動作ボタン71,71を押下しながらレバー操作により切替機能部74aを機能させてロボットRを力制御から位置御に切り替える。
手順12:ロボット動作ボタン71,71を押下しながらレバー操作により旋回軸操作機能部74cを機能させて旋回軸52を駆動して要介護者の頭を高くする一方、足先を下げる。
手順13:ロボット動作ボタン71,71を押下しながらレバー操作により切替機能部74aを機能させてロボットRを位置制御から力制御に切り替える。
要介護者の姿勢をこのようにした後、介護者により要介護者を車椅子などに移乗させる。
このように、本実施形態のロボットRによれば、介護者が要介護者をベッドから持ち上げる必用がなくなり、介護者の負担が軽減される。例えば、介護者の職業病と称される腰痛の解消が図られる。
実施形態3
図17に、本発明の実施形態3に係るロボットの操作盤70Aを示す。実施形態3は実施形態2を改変してなるものであって、マニュアル操作による動作と自動制御による動作とがなし得るようにされてなるものとされる。
すなわち、操作盤70Aには、図17に示すように、実施形態2の操作盤70にマニュアル自動切替レバー(マニュアル自動切替手段)75と、動作パターン選択ボタン(動作パターン選択手段)76と、制御部80に動作パターン保持部88とが付加されてなるものとされる。
以下、自動動作について説明する。
マニュアル自動切替レバー75を自動に切り替えて、動作パターン選択ボタン76のいずれかのポンタを押して自動動作パターンを選択すると、自動動作パターン保持部88に保持されている当該パターンが呼び出されて、そのパターンに従った動作をロボットRが行う。例えば、旋回軸52を旋回動作させながら、第1伸縮軸53および第2伸縮軸54を適宜駆動して第1伸縮軸53および第2伸縮軸54を適宜伸縮させる。
ロボットRに、このような動作をさせることにより、ロボットRがあたかも踊っているかにように見え、要介護者に癒し効果を与える。かかる癒し効果を高めるたには、ロボットに化粧カバーを装置するのが好ましい。図18に、化粧カバーがなされたロボットR二基を対向配置して自動動作させている状態を示す。
しかして、このようにすることによりロボットR,Rがタンスをしているような印象を与え、癒し効果が増大する。
このように、本実施形態によれば、あらかじめ設定されたバターンに応じてロボットRを自動動作させるようにされているので、ロボットRがあたかも踊っているような印象を要介護者に与えることができ、要介護者に対する癒し効果が得られる。
以上、本発明を実施形態に基づいて説明してきたが、本発明はかかる実施形態のみに限定されるものではなく、種々改変が可能である。
例えば、図8に示すように、専用シート30の被保持部31のロボットRの腕5bが挿入される側にラッパ状の案内部32aを形成するようにされてもよい。
また、本実施形態では、電力はロボットが保持するバッテリーによりなされるようにされているが、コードにより商用電源から電力が供給されるようにされてもよい。
R ロボット
CR 右側カバー
CL 左側カバー
1 第1昇降軸
2 第2昇降軸
3 主回動部材
3a 把持部
4 従回動部材
4a スライド部
4b ローラーベアリング
5 U字状部材
5a 底部
5b 腕
6 電源
10 操作盤
11 第1駆動用電源スイッチ
12 第2駆動用電源スイッチ
13 第1上昇用ボタン
14 第1下降用ボタン
15 第2上昇用ボタン
16 第2下降用ボタン
20 走行部材
21 パイプ
22 走行車輪
30 専用シート
31 被保持部
32 基材
32a 案内部
33 クッション層
34 表層
51 昇降軸
52 旋回軸
53 第1伸縮軸
54 第2伸縮軸
55 第1腕、右腕
56 第2腕、左腕
57 駆動用電源
70 操作盤
71 ロボット動作ボタン
72 頭部サイド指示レバー
73 電源スイッチ
74 マニュアル操作レバー
74a 切替機能部
74b 昇降軸操作機能部
74c 旋回軸操作機能部
74d 第1伸縮軸操作機能部
74e 第2伸縮軸操作機能部
75 マニュアル自動切替レバー
76 動作パターン選択ボタン
80 制御部
81 位置力制御切替手段
82 昇降軸駆動制御手段
83 旋回軸駆動制御手段
83a 旋回角制限部
84 第1伸縮軸駆動制御手段
85 第2伸縮軸駆動制御手段
86 統括部
88 動作パターン保持部
100 基部
110 載置部
120 載置部材
130 水平支持部材
160 走行部
170 前部走行部
171 前輪
172 前輪支持部材
173 水平部
174 傾斜部
180 後部走行部
181 後輪
182 後輪支持部材
Claims (15)
- ベッドの上に両端部にロボットの腕に保持される被保持部が形成されたシートを敷く手順と、
前記シートに要介護者を寝かせる手順と、
ロボットおよびロボットの腕を前記要介護者に対して位置決めする手順と、
前記ロボットを前記ベッドに向けて前進させて前記腕により前記被保持部を保持する手順と、
前記腕を所定量上昇させる手順と、
前記腕を所定量上昇させた状態で前記ロボットを前記ベッドから後退させる手順
とを含むことを特徴とする介護方法。 - 要介護者の頭部側の被保持部の高さを足元側の被保持部の高さよりも高くする手順が付加されていることを特徴とする請求項1記載の介護方法。
- 走行可能とされた基部と、前記基部に配設された第1および第2昇降軸と、U字状部材とを備え、
前記第1昇降軸は、前記U字状部材の底部を回動可能かつスライド不自在に保持する回動部材を有し、
前記第2昇降軸は、前記U字状部材の底部を回動可能かつスライド自在に保持する回動部材を有し、
前記底部が、前記第1昇降軸の回動部材に回動可能かつスライド不自在に保持され、かつ、前記第2昇降軸の回動部材に回動可能かつスライド自在に保持されてなる
ことを特徴とする介護ロボット。 - 第1昇降軸に電力を供給する第1電源と、第2昇降軸に電力を供給する第2電源とが基部に配設されてなることを特徴する請求項3記載の介護ロボット。
- 第1昇降軸と第2昇降軸との昇降を操作する操作盤が基部に配設されてなることを特徴する請求項3または4記載の介護ロボット。
- 操作盤が第1昇降軸と第2昇降軸との中間部の後ろに配設されてなることを特徴する請求項5記載の介護ロボット。
- 走行可能とされた基部と、前記基部に配設された昇降軸と、前記昇降軸に配設された旋回軸と、前記旋回軸に軸対称に配設された第1伸縮軸および第2伸縮軸と、前記第1伸縮軸に配設された第1腕と、前記第2伸縮軸に配設された第2腕とを備えてなることを特徴とする介護ロボット。
- 操作盤を備え、
前記操作盤は、マニュアル操作手段と制御部とを有し、
前記制御部は、位置制御と力制御とに制御を切り替える位置力制御切替手段と、昇降軸の駆動を制御する昇降軸駆動制御手段と、旋回軸の駆動を制御する旋回軸駆動制御手段と、第1伸縮軸の駆動を制御する第1伸縮軸駆動制御手段と、第2伸縮軸の駆動を制御する第2伸縮軸駆動制御手段とを含んでなる
ことを特徴とする請求項7記載の介護ロボット。 - 操作盤は、ロボット動作ボタンを付加して有し、
制御部は、位置制御と力制御とに制御を切り替える位置力制御切替手段と、昇降軸の駆動を制御する昇降軸駆動制御手段と、旋回軸の駆動を制御する旋回軸駆動制御手段と、第1伸縮軸の駆動を制御する第1伸縮軸駆動制御手段と、第2伸縮軸の駆動を制御する第2伸縮軸駆動制御手段とを統括する統括部を付加して有し、
前記統括部は、前記ロボット動作ボタンからの信号に応答して前記各手段の動作を可能とする
ことを特徴とする請求項8記載の介護ロボット。 - 操作盤は、要介護者の頭部の位置がロボットの右側であるか左側であるかを指示する頭部サイド指示手段を付加して有し、
旋回軸駆動制御手段は、旋回角制限部を付加して有し、
前記旋回角制限部は、前記頭部サイド指示手段からの信号に応答して要介護者の頭部が水平より下方に位置しないように旋回角を制限する
ことを特徴とする請求項8または9記載の介護ロボット。 - 操作盤は、マニュアル自動切替手段と動作パターン選択手段とを付加して有し、制御部は、動作パターン保持部を含むことを特徴とする請求項8、9または10記載の介護ロボット。
- 第1腕および第2腕が棒状とされてなることを特徴とする請求項7、8、9、10または11記載の介護ロボット。
- 駆動用電源を備えてなることを特徴する請求項7,8,9、10、11または12記載の介護ロボット。
- 化粧カバーが装着されてなることを特徴とする請求項7、8、9、10、11、12または13記載の介護ロボット。
- 基部が走行部を有し、前記走行部が前輪支持部材を有し、前記前輪支持部材が前部水平部と上り勾配とされた後部傾斜部を有してなることを特徴とする請求項7記載の介護ロボット。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CA2881311A CA2881311C (en) | 2012-09-19 | 2013-09-17 | Care method and care robot used therein |
| KR1020157004554A KR102090850B1 (ko) | 2012-09-19 | 2013-09-17 | 간호 방법 및 그것에 이용하는 간호 로봇 |
| AU2013318942A AU2013318942B2 (en) | 2012-09-19 | 2013-09-17 | Care method and care robot used therein |
| DK13839700.5T DK2898865T3 (da) | 2012-09-19 | 2013-09-17 | Pleje-fremgangsmåde og plejerobot, der anvendes ved denne |
| CN201380048394.1A CN104661630A (zh) | 2012-09-19 | 2013-09-17 | 看护方法以及在该看护方法中使用的看护机器人 |
| EP13839700.5A EP2898865B1 (en) | 2012-09-19 | 2013-09-17 | Care method and care robot used therein |
| US14/642,136 US10272006B2 (en) | 2012-09-19 | 2015-03-09 | Care method and care robot used therein |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012-206401 | 2012-09-19 | ||
| JP2012206401A JP6074654B2 (ja) | 2012-09-19 | 2012-09-19 | ロボット |
| JP2012206385A JP6142116B2 (ja) | 2012-09-19 | 2012-09-19 | 介護方法およびそれに用いる介護ロボット |
| JP2012-206385 | 2012-09-19 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US14/642,136 Continuation US10272006B2 (en) | 2012-09-19 | 2015-03-09 | Care method and care robot used therein |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014046292A1 true WO2014046292A1 (ja) | 2014-03-27 |
Family
ID=50341591
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/075960 Ceased WO2014046292A1 (ja) | 2012-09-19 | 2013-09-17 | 介護方法およびそれに用いる介護ロボット |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US10272006B2 (ja) |
| EP (1) | EP2898865B1 (ja) |
| KR (1) | KR102090850B1 (ja) |
| CN (1) | CN104661630A (ja) |
| AU (1) | AU2013318942B2 (ja) |
| CA (1) | CA2881311C (ja) |
| DK (1) | DK2898865T3 (ja) |
| WO (1) | WO2014046292A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015181874A1 (ja) * | 2014-05-26 | 2015-12-03 | 株式会社安川電機 | 移乗補助装置 |
| WO2015181873A1 (ja) * | 2014-05-26 | 2015-12-03 | 株式会社安川電機 | 移乗補助装置 |
| JP2016067753A (ja) * | 2014-09-30 | 2016-05-09 | 株式会社安川電機 | スリングシート、移乗補助装置、移乗補助方法 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2920283C (en) * | 2013-10-18 | 2020-07-14 | Muscle Corporation | Robot for transferring a patient |
| JP6565090B2 (ja) | 2016-02-10 | 2019-08-28 | 株式会社国際電気通信基礎技術研究所 | 回転構造、アシストシステム、および、ロボット |
| CN106142096A (zh) * | 2016-06-04 | 2016-11-23 | 浙江侍维波机器人科技有限公司 | 含可变形态机械臂的搬运和抱抬肥胖症病人的医疗机器人 |
| CN105877933A (zh) * | 2016-06-04 | 2016-08-24 | 浙江侍维波机器人科技有限公司 | 含紧急救护机器人的自主运载系统 |
| CN106420226B (zh) * | 2016-10-13 | 2019-05-17 | 天津大学 | 重伤病患柔性换乘转运机器人 |
| KR102031057B1 (ko) | 2017-09-27 | 2019-10-15 | 한국과학기술연구원 | 환자 이송 장치 |
| CN111467138A (zh) * | 2020-03-31 | 2020-07-31 | 中南大学湘雅医院 | 一种操作灵活、使用方便胸外科疾病检查装置 |
| CN112545791A (zh) * | 2020-12-11 | 2021-03-26 | 广东全影汇信息科技有限公司 | 一种多功能护理床 |
| CN112660969B (zh) * | 2020-12-30 | 2021-08-27 | 亚洲富士电梯股份有限公司 | 具有防护结构的加装电梯以及制造设备与制造工艺 |
| KR102507726B1 (ko) | 2020-12-31 | 2023-03-09 | (주)맨엔텔 | 추락방지, 전동주행 및 중력보상 기능을 포함한 통합제어 및 이에 대한 모니터링이 가능한 이승 로봇 시스템 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002136549A (ja) | 2000-11-06 | 2002-05-14 | Okuma Seisakusho:Kk | 介護用キャリア |
| JP2002253623A (ja) * | 2001-03-01 | 2002-09-10 | Iura:Kk | 介護用リフト |
| WO2009147832A1 (ja) * | 2008-06-06 | 2009-12-10 | パナソニック株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| JP2010029420A (ja) * | 2008-07-29 | 2010-02-12 | Toyota Motor Corp | 移乗用ベッドのマットレス及び移乗方法 |
| JP2011172898A (ja) * | 2010-01-29 | 2011-09-08 | Nobuo Ueda | 介護用リフト |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2035840A (en) * | 1934-03-30 | 1936-03-31 | Sechrist | Invalid lifting apparatus |
| US2418606A (en) * | 1944-09-18 | 1947-04-08 | Smith Ralph Nichol | Invalid lift and transfer device |
| FR93658E (fr) * | 1967-02-21 | 1969-05-02 | Etienne Joseph Jean | Appareil notamment pour le transport des malades. |
| US3813712A (en) * | 1972-06-28 | 1974-06-04 | N Bonnin | Patient stretcher transport system |
| AU6262973A (en) * | 1972-12-01 | 1975-05-22 | Campbell D I | Trolleys |
| GB1444802A (ja) * | 1973-03-06 | 1976-08-04 | ||
| US4649581A (en) * | 1984-12-12 | 1987-03-17 | Lee Jr John P | Patient lift assembly |
| US5084921A (en) * | 1991-01-18 | 1992-02-04 | Hicks Jr George W | Supine patient lift and transfer apparatus |
| JPH09168566A (ja) * | 1995-12-18 | 1997-06-30 | Shinmeiwa Auto Eng Kk | 車椅子 |
| GB2319226A (en) * | 1996-11-01 | 1998-05-20 | Phillip Henry Slocombe | Hospital trolley |
| GB2381256A (en) * | 2001-09-29 | 2003-04-30 | Collette Fellows-Smith | Patient lifting device |
| DE20317997U1 (de) * | 2003-11-20 | 2004-04-01 | Coopmans, Wilhelm Richard, Dipl.-Ing. | Transportvorrichtung zum Personentransport |
| US20050135907A1 (en) * | 2003-11-24 | 2005-06-23 | Romano James P. | Medical lift and transport system, method and apparatus |
| JP2009515560A (ja) * | 2005-03-14 | 2009-04-16 | エルゴ アシスト テクノロジー リミテッド ライアビリティ カンパニー | 関連フレーム及びリフトカート付き患者移動システム |
| US7434278B2 (en) * | 2005-06-29 | 2008-10-14 | Elizabeth Ann White | Apparatus for patient mobility |
| JP2007252469A (ja) * | 2006-03-22 | 2007-10-04 | Matsushita Electric Ind Co Ltd | 支持装置およびそれを用いた介護ロボット装置 |
| US20100115695A1 (en) * | 2006-04-12 | 2010-05-13 | White Elizabeth A | Dampened Belt Retractor |
| US20080066228A1 (en) * | 2006-09-20 | 2008-03-20 | Yohei Kume | Supporting apparatus and nursing robot system |
| JPWO2008129847A1 (ja) * | 2007-04-12 | 2010-07-22 | パナソニック株式会社 | 移乗支援装置 |
| US8397320B2 (en) * | 2010-12-23 | 2013-03-19 | Guido Capaldi | Patient lifting device |
-
2013
- 2013-09-17 CA CA2881311A patent/CA2881311C/en active Active
- 2013-09-17 WO PCT/JP2013/075960 patent/WO2014046292A1/ja not_active Ceased
- 2013-09-17 DK DK13839700.5T patent/DK2898865T3/da active
- 2013-09-17 CN CN201380048394.1A patent/CN104661630A/zh active Pending
- 2013-09-17 KR KR1020157004554A patent/KR102090850B1/ko active Active
- 2013-09-17 AU AU2013318942A patent/AU2013318942B2/en active Active
- 2013-09-17 EP EP13839700.5A patent/EP2898865B1/en active Active
-
2015
- 2015-03-09 US US14/642,136 patent/US10272006B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002136549A (ja) | 2000-11-06 | 2002-05-14 | Okuma Seisakusho:Kk | 介護用キャリア |
| JP2002253623A (ja) * | 2001-03-01 | 2002-09-10 | Iura:Kk | 介護用リフト |
| WO2009147832A1 (ja) * | 2008-06-06 | 2009-12-10 | パナソニック株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| JP2010029420A (ja) * | 2008-07-29 | 2010-02-12 | Toyota Motor Corp | 移乗用ベッドのマットレス及び移乗方法 |
| JP2011172898A (ja) * | 2010-01-29 | 2011-09-08 | Nobuo Ueda | 介護用リフト |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015181874A1 (ja) * | 2014-05-26 | 2015-12-03 | 株式会社安川電機 | 移乗補助装置 |
| WO2015181873A1 (ja) * | 2014-05-26 | 2015-12-03 | 株式会社安川電機 | 移乗補助装置 |
| JP2016067753A (ja) * | 2014-09-30 | 2016-05-09 | 株式会社安川電機 | スリングシート、移乗補助装置、移乗補助方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2013318942B2 (en) | 2018-12-06 |
| AU2013318942A1 (en) | 2015-03-05 |
| EP2898865A4 (en) | 2016-09-14 |
| CN104661630A (zh) | 2015-05-27 |
| DK2898865T3 (da) | 2019-09-09 |
| US10272006B2 (en) | 2019-04-30 |
| KR20150058166A (ko) | 2015-05-28 |
| EP2898865B1 (en) | 2019-07-10 |
| EP2898865A1 (en) | 2015-07-29 |
| KR102090850B1 (ko) | 2020-03-18 |
| US20150173988A1 (en) | 2015-06-25 |
| CA2881311A1 (en) | 2014-03-27 |
| CA2881311C (en) | 2020-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2014046292A1 (ja) | 介護方法およびそれに用いる介護ロボット | |
| US9414980B2 (en) | Bed, and combining method and separating method of bed | |
| JP6715533B2 (ja) | 移乗装置 | |
| JP2011098005A (ja) | 介護用ストレッチャー | |
| JP6142116B2 (ja) | 介護方法およびそれに用いる介護ロボット | |
| JP6074654B2 (ja) | ロボット | |
| KR102150594B1 (ko) | 휠체어 | |
| JPS601022B2 (ja) | 看護ロボツト | |
| KR20120059999A (ko) | 좌석의 승강 및 전후방향 이동이 가능한 휠체어 | |
| JP6169418B2 (ja) | 移乗支援装置 | |
| JP6340352B2 (ja) | ベッド装置 | |
| JP4903000B2 (ja) | 立ち上がり支援装置 | |
| JP6257462B2 (ja) | 電動移乗機 | |
| JP5792269B2 (ja) | 介護者補助装置 | |
| KR101171520B1 (ko) | 전동침대 | |
| JP5707371B2 (ja) | ベッド装置 | |
| JP4146682B2 (ja) | 起床式ベッド装置 | |
| JP6052951B2 (ja) | 歩行補助装置 | |
| JP2013090647A (ja) | 移乗支援装置及び移乗支援装置の制御方法 | |
| JP7213052B2 (ja) | 身体支持装置 | |
| JP2011147522A (ja) | 移乗支援装置 | |
| JP2004223150A (ja) | 移乗補助機器 | |
| JP2019000306A (ja) | 移乗支援装置 | |
| JP2005131386A (ja) | 可動ベッド | |
| JP2000254179A (ja) | 車椅子 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13839700 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2881311 Country of ref document: CA |
|
| ENP | Entry into the national phase |
Ref document number: 20157004554 Country of ref document: KR Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2013318942 Country of ref document: AU Date of ref document: 20130917 Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |