WO2013077376A1 - 電気自動車 - Google Patents
電気自動車 Download PDFInfo
- Publication number
- WO2013077376A1 WO2013077376A1 PCT/JP2012/080230 JP2012080230W WO2013077376A1 WO 2013077376 A1 WO2013077376 A1 WO 2013077376A1 JP 2012080230 W JP2012080230 W JP 2012080230W WO 2013077376 A1 WO2013077376 A1 WO 2013077376A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- motor
- braking torque
- load
- regenerative
- regenerative brake
- Prior art date
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2009—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed for braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L1/00—Supplying electric power to auxiliary equipment of vehicles
- B60L1/003—Supplying electric power to auxiliary equipment of vehicles to auxiliary motors, e.g. for pumps, compressors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2036—Electric differentials, e.g. for supporting steering vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/10—Indicating wheel slip ; Correction of wheel slip
- B60L3/102—Indicating wheel slip ; Correction of wheel slip of individual wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/10—Indicating wheel slip ; Correction of wheel slip
- B60L3/106—Indicating wheel slip ; Correction of wheel slip for maintaining or recovering the adhesion of the drive wheels
- B60L3/108—Indicating wheel slip ; Correction of wheel slip for maintaining or recovering the adhesion of the drive wheels whilst braking, i.e. ABS
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/51—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells characterised by AC-motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/14—Dynamic electric regenerative braking for vehicles propelled by ac motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/18—Controlling the braking effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/24—Electrodynamic brake systems for vehicles in general with additional mechanical or electromagnetic braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/24—Electrodynamic brake systems for vehicles in general with additional mechanical or electromagnetic braking
- B60L7/26—Controlling the braking effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T1/00—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles
- B60T1/02—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels
- B60T1/10—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels by utilising wheel movement for accumulating energy, e.g. driving air compressors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/58—Combined or convertible systems
- B60T13/585—Combined or convertible systems comprising friction brakes and retarders
- B60T13/586—Combined or convertible systems comprising friction brakes and retarders the retarders being of the electric type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/74—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive
- B60T13/741—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive acting on an ultimate actuator
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D61/00—Brakes with means for making the energy absorbed available for use
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/44—Wheel Hub motors, i.e. integrated in the wheel hub
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/50—Structural details of electrical machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/24—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/26—Vehicle weight
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/46—Drive Train control parameters related to wheels
- B60L2240/461—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/46—Drive Train control parameters related to wheels
- B60L2240/465—Slip
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/16—Driver interactions by display
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/26—Driver interactions by pedal actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
- B60L2260/28—Four wheel or all wheel drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2240/00—Monitoring, detecting wheel/tire behaviour; counteracting thereof
- B60T2240/06—Wheel load; Wheel lift
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2270/00—Further aspects of brake control systems not otherwise provided for
- B60T2270/60—Regenerative braking
- B60T2270/604—Merging friction therewith; Adjusting their repartition
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Definitions
- the present invention relates to an electric vehicle such as an in-wheel motor vehicle such as a battery drive or a fuel cell drive provided with a motor for driving a wheel.
- an electric vehicle such as an in-wheel motor vehicle such as a battery drive or a fuel cell drive provided with a motor for driving a wheel.
- an IPM type motor an embedded magnet type synchronous motor
- the feature of this motor is that the regenerative brake can be easily applied.
- the regenerative brake should be used as much as possible.
- Patent Document 1 there is, for example, Patent Document 1.
- the regenerative brake directly brakes the wheel, the tire may slip when applied excessively compared to the friction brake.
- the braking torque is directly transmitted to each wheel, so that torque distribution between other wheels cannot be performed, and therefore it is necessary to avoid tire slip as much as possible.
- the wheels are momentarily floating with respect to the road surface during traveling, and the friction coefficient between the tire and the road surface changes depending on the road surface condition. For this reason, it is difficult to appropriately control the regenerative brake only by the detected values of the motor driving torque and the wheel rotational speed.
- An object of the present invention is to provide an electric vehicle that uses a regenerative brake as much as possible and can prevent tire slip due to excessive application of the regenerative brake.
- the electric vehicle includes a motor 6 for driving the wheel 2, a motor control unit 29 for controlling the motor 6, and a regenerative braking force applied to the wheel 2 by the power generation of the motor 6 provided in the motor control unit 29.
- An electric vehicle including a regenerative brake 34 to be applied and a mechanical brake 9 to mechanically apply a braking force to the wheel 2, provided on a wheel bearing 4 that supports the wheel 2, and provided between a road surface and a tire.
- a load sensor 41 for detecting an acting load in the vehicle traveling direction; and a load-compatible regenerative brake limiting means 36 for reducing the braking torque of the regenerative brake 34 when the output of the load sensor 41 reaches a set value. Is.
- the load-compatible regenerative brake limiting means 36 reduces the braking torque of the regenerative brake 34 when the load in the vehicle traveling direction acting between the road surface and the tire reaches a set value.
- the braking torque of the regenerative brake 34 is reduced according to the load acting between the road surface and the tire, slipping of the tire due to excessive application of the regenerative brake 34 can be prevented.
- the dominant of the regenerative brake 34 is limited in accordance with the load between the road surface and the tire that is actually acting, the difference in the road surface state is different from the case where the driving torque of the motor 6 or the detected value of the wheel rotation speed is limited. Appropriate control can be quickly performed on the lift of the tires from the road surface. Therefore, even if the regenerative brake 34 is used as much as possible, tire slip due to excessive application of the regenerative brake 34 can be prevented.
- the load corresponding regenerative brake limiting means 36 after the output of the load sensor 41 reaches a set value and reduces the braking torque of the regenerative brake 34, the output value of the load sensor 41 is lower than the set value. When it becomes below, it is good to cancel the control which reduces the braking torque of the regenerative brake 34. When the traveling load between the road surface and the tire decreases, it is not necessary to reduce the braking torque by the regenerative brake 34. By canceling the control to reduce the energy, the regenerative brake 34 can be used as much as possible to recover the energy.
- the wheel 2 when a regenerative braking torque command is given from the brake operating means 17 to the motor control unit 29 via the ECU 21 which is an electric control unit for controlling the vehicle as a whole, the wheel 2 is controlled according to a predetermined rule.
- the maximum possible regenerative braking torque of the regenerative brake 34 is calculated from the rotation speed and the state of charge of the battery 19, and if the maximum possible regenerative braking torque is less than the regenerative braking torque command, the regenerative braking torque command is regenerated.
- Maximum operating means 35 for operating the braking torque of the brake 34 to the maximum is provided in the motor control unit 29, and the load corresponding regenerative brake limiting means 36 has priority over the control of the maximum operating means 35 to brake the regenerative brake 34. You may make it produce the function to reduce a torque.
- the regenerative brake 34 cannot perform braking effectively when the charge rate of the battery 19 is high or the remaining capacity is low, but the maximum operating means 35 calculates the maximum possible regenerative braking torque, The braking torque of the regenerative brake 34 is operated to the maximum within the range. For this reason, the regenerative brake 34 can be used as much as possible without causing the problem of insufficient braking torque due to the regenerative brake 34. In this way, while monitoring the charging state of the battery 19, the regenerative brake 34 is used as much as possible, and further, slip prevention due to excessive use of the regenerative brake 34 by the load corresponding regenerative brake limiting means 36 is performed. The use of the regenerative brake 34 can be further enhanced while ensuring the slip prevention.
- the motor control unit 29 is provided with reporting means 37 for reporting the value of the regenerative braking torque at which the regenerative brake 34 functions to the ECU 21, and the regenerative braking torque reported from the reporting means 37 to the ECU 21. It is preferable to provide a braking force distribution means 38 for applying a braking torque, which is a difference between the value of the above and a regenerative braking torque command given to the motor control unit 29, to the mechanical brake 9.
- a braking force distribution means 38 for applying a braking torque, which is a difference between the value of the above and a regenerative braking torque command given to the motor control unit 29, to the mechanical brake 9.
- the load sensor 41 has a function of detecting the load in the vehicle width direction acting between the road surface and the tire in addition to the load in the vehicle traveling direction, and the load corresponding regenerative brake limiting means 36 is The braking torque of the regenerative brake 34 is reduced when the value calculated by the setting rule reaches the set value from the load in the vehicle traveling direction and the load in the vehicle width direction output from the load sensor 41. Also good.
- the load between the road surface and the tire in the vehicle traveling direction on the left and right wheels 2 is different, and a load in the vehicle width direction acts between the road surface and the tire.
- the regenerative brake 34 is more surely possible as much as possible by determining whether the regenerative braking torque can be reduced by the load corresponding regenerative brake limiting means 36 using both the load in the vehicle width direction and the load in the vehicle traveling direction. And slipping of the tire due to excessive application of the regenerative brake 34 can be prevented.
- the motor 6 may be partly or wholly disposed in the wheel 2 to constitute the in-wheel motor driving device 8 including the motor 6 and the wheel bearing 4.
- the in-wheel motor drive device 8 may include a speed reducer 7 that decelerates the rotation of the motor 6 and transmits it to the wheels.
- the in-wheel motor drive device 8 since the braking torque of the regenerative brake 34 is directly transmitted to the wheels 2, torque distribution between the other wheels 2 and 3 cannot be performed, and therefore tire slip is avoided as much as possible. is necessary. Therefore, the effect of preventing slip according to the present invention is even more effective.
- the inverter device 22 and the in-wheel motor driving device 8 constitute an in-wheel motor unit 30, and the inverter device 22 includes the motor control unit 29 and the motor control unit.
- the power control unit 29 may include a power circuit unit 28 that controls the motor 6 to pass a drive current, and the motor control unit 29 may be provided with the load corresponding regenerative brake limiting unit 36.
- FIG. 1 is a block diagram of a conceptual configuration showing an electric vehicle according to an embodiment of the present invention in a plan view. It is a block diagram which shows the conceptual structure of the in-wheel motor unit of the same electric vehicle. It is a flowchart which shows control of the braking force distribution means of ECU in the same electric vehicle.
- FIG. 6 is a sectional view taken along line VI-VI in FIG. 5. It is a partial expanded sectional view of FIG. It is the figure which combined the side view of the outer member of the wheel bearing in the same electric vehicle, and the signal processing unit for load detection. It is an enlarged plan view of a sensor unit in the electric vehicle. It is a longitudinal cross-sectional view of the sensor unit. It is a longitudinal cross-sectional view of an example of the rotation detector in the same electric vehicle.
- This electric vehicle is a four-wheeled vehicle in which the wheels 2 that are the left and right rear wheels of the vehicle body 1 are driving wheels and the wheels 3 that are the left and right front wheels are steering wheels of driven wheels.
- the wheels 2 and 3 serving as driving wheels and driven wheels both have tires and are supported by the vehicle body 1 via wheel bearings 4 and 5, respectively.
- the wheel bearings 4 and 5 are given the abbreviation “H / B” of the hub bearing in FIG.
- the left and right wheels 2, 2 serving as driving wheels are driven by independent traveling motors 6, 6, respectively. The rotation of the motor 6 is transmitted to the wheel 2 via the speed reducer 7 and the wheel bearing 4.
- the motor 6, the speed reducer 7, and the wheel bearing 4 constitute an in-wheel motor drive device 8 that is one assembly part, and the in-wheel motor drive device 8 is partially or entirely inside the wheel 2. Placed in.
- the motor 6 may directly rotate and drive the wheels 2 without using the speed reducer 7.
- Each in-wheel motor drive device 8 constitutes an in-wheel motor unit 30 together with an inverter device 22 described later.
- Each wheel 2 and 3 is provided with mechanical brakes 9 and 10 which are friction brakes such as electric type.
- Wheels 3 and 3 which are steering wheels serving as left and right front wheels can be steered via a steering mechanism 11 and are steered by a steering mechanism 12.
- the steering mechanism 11 is a mechanism that changes the angle of the left and right knuckle arms 11b that hold the wheel bearing 5 by moving the tie rod 11a to the left and right.
- the EPS (electric power steering) motor 13 converts the rotation and linear motion. It can be moved left and right via a mechanism (not shown).
- the steering mechanism 12 detects a steering angle of a steering wheel 14 that is not mechanically connected to the tie rod 11a by a steering angle sensor 15, and a steering command that gives a driving command to the EPS motor 13 by a turning command that is the detected steering angle. It is a by-wire type.
- a main ECU 21 that is an electric control unit that controls the entire vehicle, an inverter device 22 that controls the driving motor 6 in accordance with a command from the ECU 21, and a brake controller 23 are mounted on the vehicle body 1.
- the ECU 21 includes a computer, a program executed by the computer, various electronic circuits, and the like.
- the ECU 21 is roughly divided into a drive control unit 21a and a general control unit 21b when classified roughly by function.
- the drive control unit 21a gives the left and right wheel motors 6 and 6 the acceleration command output from the accelerator operation unit 16, the deceleration command output from the brake operation unit 17, and the turning command output from the steering angle sensor 15.
- the given acceleration / deceleration command is generated and output to the inverter device 22.
- the drive control unit 21a outputs an acceleration / deceleration command to be output, information on the tire rotation speed obtained from the rotation sensor 24 provided on the wheel bearings 4 and 5 of the wheels 2 and 3, You may have the function to correct
- the accelerator operation unit 16 includes an accelerator pedal and a sensor 16a that detects the amount of depression and outputs the acceleration command.
- the brake operation unit 17 includes a brake pedal and a sensor 17a that detects the amount of depression and outputs the deceleration command.
- the general control unit 21b of the ECU 21 has a function of controlling various auxiliary machine systems 25, a function of processing input commands from the console operation panel 26, a function of displaying on the display means 27, and the like.
- the auxiliary machine system 25 is, for example, an air conditioner, a light, a wiper, a GPS, an airbag or the like, and is shown here as a representative block.
- the brake controller 23 is a means for giving a braking command to the mechanical brakes 9 and 10 of the wheels 2 and 3 in accordance with a braking command output from the ECU 21, and is constituted by an electronic circuit, a microcomputer, or the like serving as an ECU dedicated to braking.
- the braking command output from the main ECU 21 includes a command generated by means for improving the safety of the ECU 21 in addition to a command generated by a deceleration command output from the brake operation unit 17.
- the brake controller 23 includes an antilock brake system.
- the inverter device 22 includes a power circuit unit 28 provided for each motor 6 and a motor control unit 29 that controls the power circuit unit 28.
- the motor control unit 29 may be provided in common for each power circuit unit 28 or may be provided separately, but even if provided in common, each power circuit unit 28. For example, can be controlled independently so that the motor torque is different from each other.
- the motor control unit 29 has a function of outputting information (referred to as “IWM system information”) such as detection values and control values related to the in-wheel motor drive device 8 of the motor control unit 29 to the ECU 21.
- IWM system information information
- the motor control unit 29 is provided separately for each power circuit unit 28, and includes an inverter device 22 composed of the power circuit unit 28 and the motor control unit 29, and the motor 6 to be controlled.
- the in-wheel motor drive device 8 constitutes the in-wheel motor unit 30 as described above.
- FIG. 2 is a block diagram showing a conceptual configuration of the in-wheel motor unit 30.
- the power circuit unit 28 of the inverter device 22 includes an inverter 31 that converts the DC power of the battery 19 into three-phase AC power used for driving the motor 6, and a PWM driver 32 that controls the inverter 31.
- the motor 6 is a three-phase synchronous motor, for example, an IPM type (embedded magnet type) synchronous motor or the like.
- the inverter 31 is composed of a plurality of semiconductor switching elements (not shown), and the PWM driver 32 performs pulse width modulation on the input current command and gives an on / off command to each of the semiconductor switching elements.
- the motor control unit 29 includes a computer, a program executed on the computer, and an electronic circuit, and has a basic drive control unit 33 as a basic control unit.
- the basic drive control unit 33 is a unit that converts the current command into a current command in accordance with an acceleration / deceleration command by a torque command or the like given from the ECU 21 that is the host control unit, and gives the current command to the PWM driver 32 of the power circuit unit 28.
- the basic drive control unit 33 obtains a motor current value flowing from the inverter 31 to the motor 6 from the current detection means 39, and performs current feedback control.
- the motor drive control unit 33 obtains the rotation angle of the rotor of the motor 6 from the angle sensor 42 and performs control according to the rotation angle such as vector control.
- the motor control unit 29 is provided with the next regenerative brake 34, the maximum operating means 35, the load corresponding regenerative brake limiting means 36, and the reporting means 37, and the ECU 21 is provided with a braking force distribution means 38.
- the regenerative brake 34 is a means for applying a regenerative braking force to the wheels 2 by the power generation of the motor 6.
- a regenerative braking torque command given from the braking force distribution means 38 of the ECU 21 is used to generate a drive torque output by the basic drive control unit 33. Control to reduce.
- the regenerative brake 34 has a function of charging the battery 19 with the electric power generated by the motor 6 via the inverter 31.
- the maximum actuating means 35 when a regenerative braking torque command is given from the brake operating means 17 to the motor control section 29 via the braking force distributing means 38 of the ECU 21, follows the rules determined by mathematical formulas and the like.
- the maximum possible regenerative braking torque of the regenerative brake 34 is calculated from the rotational speed and the state of charge of the battery 19, and if the maximum possible regenerative braking torque is less than the regenerative braking torque command, the regenerative braking is performed with respect to the regenerative braking torque command.
- 34 is a means for operating the braking torque of 34 to the maximum.
- the rotation speed of the wheel 2 is recognized using, for example, the output of the rotation sensor 24 provided in the wheel bearing 4, and the state of charge of the battery 19 is the state of charge provided in the battery 19. Recognizing by the output of a detection means (not shown).
- the state of charge of the battery 19 here may be the charge rate or the remaining chargeable capacity.
- Load corresponding regenerative brake limiting means 36 when it is detected by the load sensor 41, the value of the load F x in the vehicle traveling direction acting between the road surface-tire reaches a set value for the limit, the braking of the regenerative brake 34 It is a means to reduce torque.
- the load corresponding regenerative brake limiting means 36 has a function of reducing the braking torque of the regenerative brake 34 in preference to the control of the maximum operating means 35. Further, the load corresponding regenerative brake limiting means 36 reaches the set value for return lower than the set value after the output of the load sensor 41 reaches the set value for limit and reduces the braking torque of the regenerative brake 34.
- the set value and the extent to which the braking torque of the regenerative brake 34 is reduced are set by appropriately considering through simulation or the like.
- the load sensor 41 is provided in the wheel bearing 4 as will be described later with a specific example.
- Load corresponding regenerative brake limiting means 36 in addition to the control corresponding to the load F x of the vehicle traveling direction to the output of the load sensor 41, a load F of the load F x in the vehicle width direction of the vehicle traveling direction to the output of the load sensor 41 From y , when the value calculated by the setting rule reaches the set value, the braking torque of the regenerative brake may be reduced.
- the load sensor 41 in addition to the load F x in the vehicle traveling direction, or to have a function of detecting a load F y in the vehicle width direction acting between the road surface-tire or the load in the vehicle width direction, provide another load sensor (not shown) for detecting the F y.
- the reporting means 37 is means for reporting the value of the regenerative braking torque at which the regenerative brake 34 functions to the ECU.
- the braking force distribution means 38 of the ECU 21 distributes a total braking torque command given as a deceleration command from the brake operation means 17 into a regenerative braking torque command by the regenerative brake 34 and a braking torque command for the mechanical brakes 9 and 10. Means.
- the braking force distribution means 38 gives the mechanical brakes 9 and 10 a braking torque that is a difference between the value of the regenerative braking torque reported from the reporting means 37 and the regenerative braking torque command given to the motor control unit 29. Control to add to braking torque.
- a braking torque command applied to the mechanical brakes 9 and 10 by the braking force distribution means 38 is applied to the mechanical brakes 9 and 10 via the brake controller 23.
- FIG. 3A shows the control of the braking force distribution means 38 of the ECU 21, and FIG. 3B shows the control of the maximum operation means 35 and the load corresponding regenerative brake limiting means 36.
- the braking force distribution means 38 sends the braking torque command to the motor control unit 29 of the motor 6 of each wheel 2. (S2).
- the braking force distribution means 38 outputs all the braking torque commands of the brake operating means 17 as regenerative braking torque commands in the case of a braking torque within a predetermined normal range excluding sudden braking or the like, and the mechanical brake 9 , 10 is not given a braking torque command. Thereafter, the braking force distribution means 38 waits for a report from the reporting means 37 of each regenerative brake 34 (S3).
- the regenerative braking torque command from the braking force distribution means 38 is input to the maximum operating means 35 of the motor control unit 29 (step R1 in FIG. 3B), the regenerative braking is performed from the rotational speed of the wheel 2 and the charged state of the battery 19. 34 possible maximum regenerative braking torques are calculated (R2). This calculation is performed in accordance with rules defined by mathematical formulas.
- the maximum possible regenerative braking torque ⁇ BRM increases in proportion to the battery chargeable amount when the battery chargeable amount exceeds a certain level.
- the maximum operating means 35 compares the maximum possible regenerative braking torque ⁇ BRM with the regenerative braking torque command ⁇ BRO (R3), and if the maximum possible regenerative braking torque ⁇ BRM is less than the regenerative braking torque command ⁇ BRO.
- the braking torque of the regenerative brake 34 is operated to the maximum with respect to the regenerative braking torque command ⁇ BRO (R4).
- the shortage causes the mechanical brakes 9 and 10 to operate.
- the necessary braking torque ⁇ BR is shared by the regenerative braking torque ⁇ BR and the braking torque ⁇ BRS of the mechanical brakes 9 and 10.
- the maximum regenerative braking torque tau BRM regenerative braking torque command tau BRO above to generate a regenerative braking torque of the regenerative braking torque command tau BRO content by the regenerative brake 34 (R5).
- the load corresponding regenerative braking limiting means 36 the regenerative braking torque command to the motor control unit 29 is input, is detected by the load sensor 41, the value of the load F x in the vehicle traveling direction acting between the road surface-tire comparing the set value for limiting a, when a load F x in the vehicle traveling direction has reached the set value, it reduces the braking torque of the regenerative brake 34 (R6).
- the control for reducing the braking torque is performed with priority over the control of the maximum operating means 35.
- the reporting means 37 reports the value of the regenerative braking torque at which the regenerative brake 34 functions to the ECU 21 (R7).
- the braking force distribution means 38 of the ECU 21 is mechanically connected via a brake controller 23 to a braking torque that is a difference between the value of the regenerative braking torque reported from the reporting means 37 and the regenerative braking torque command given to the motor control unit 29.
- the brakes 9 and 10 are given (S4).
- the brake controller 23 controls the mechanical brake 9 of the wheel 2 to which the regenerative braking torque has been reduced so as to apply the reduced braking torque to the mechanical brake 9 of the wheel 2.
- the braking torque corresponding to the reduced regenerative braking torque may be distributed.
- the load corresponding regenerative brake limiting means 36 is configured to reduce the braking torque of the regenerative brake 34 after the output of the load sensor 41 reaches the set value for limiting.
- the control for reducing the braking torque of the regenerative brake 34 is released.
- the braking torque of the regenerative brake 34 is reduced in accordance with the load acting between the road surface and the tire, so that tire slip due to excessive application of the regenerative brake 34 can be prevented.
- the dominant of the regenerative brake 34 is limited in accordance with the load between the road surface and the tire that is actually acting, the difference in the road surface state is different from the case where the driving torque of the motor 6 or the detected value of the wheel rotation speed is limited. Appropriate control can be quickly performed on the lift of the tires from the road surface. Therefore, even if the regenerative brake 34 is used as much as possible, tire slip due to excessive application of the regenerative brake 34 can be prevented.
- the present invention is applied to the in-wheel motor drive device 8.
- the in-wheel motor drive device 8 since the braking torque is directly transmitted to each wheel 2, the torque between the other wheels 2 and 3. Distribution is not possible, so it is necessary to avoid tire slip as much as possible. For this reason, the slip prevention action by providing the load corresponding regenerative brake limiting means 36 is more effective.
- the load corresponding regenerative brake limiting means 36 after the output of the load sensor 41 reaches the set value and reduces the braking torque of the regenerative brake 34, the set value for return whose output of the load sensor 41 is lower than the set value.
- the control which reduces the braking torque of the said regenerative brake is cancelled
- the traveling load between the road surface and the tire decreases, it is not necessary to reduce the braking torque by the regenerative brake 34.
- the regenerative brake can be used as much as possible to recover the energy.
- the maximum effect means 35 provides the following effects.
- the regenerative brake 34 cannot perform braking effectively when the charge rate of the battery 19 is high or the remaining capacity is low, but the maximum operating means 35 calculates the maximum possible regenerative braking torque ⁇ BRM , The braking torque of the regenerative brake 34 is operated to the maximum within the range. For this reason, the regenerative brake 34 can be used as much as possible without causing the problem of insufficient braking torque due to the regenerative brake 34.
- the regenerative brake 34 is used as much as possible while monitoring the charging state of the battery, and further, slip prevention due to excessive use of the regenerative brake 36 by the load-compatible regenerative brake limiting means 36 is performed. The use of the regenerative brake can be further enhanced while ensuring the reliability.
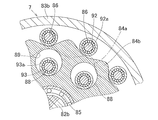
- the in-wheel motor drive device 8 includes a reduction gear 7 interposed between a wheel bearing 4 and a motor 6, and a hub of the wheel 2 that is a drive wheel supported by the wheel bearing 4 and a rotation output shaft of the motor 6. 74 are connected on the same axis.
- the speed reducer 7 is a cycloid speed reducer, in which eccentric portions 82a and 82b are formed on a rotational input shaft 82 that is coaxially connected to a rotational output shaft 74 of the motor 6, and bearings 85 are respectively provided on the eccentric portions 82a and 82b.
- the curved plates 84a and 84b are mounted, and the eccentric motion of the curved plates 84a and 84b is transmitted to the wheel bearing 4 as rotational motion.
- the side closer to the outer side in the vehicle width direction of the vehicle when attached to the vehicle is referred to as the outboard side, and the side closer to the center of the vehicle is referred to as the inboard side.
- the wheel bearing 4 includes an outer member 51 in which a double row rolling surface 53 is formed on the inner periphery, an inner member 52 in which a rolling surface 54 facing each of the rolling surfaces 53 is formed on the outer periphery, and these
- the outer member 51 and the inner member 52 are composed of double-row rolling elements 55 interposed between the rolling surfaces 53 and 54 of the inner member 52.
- the inner member 52 also serves as a hub for attaching the drive wheels.
- the wheel bearing 4 is a double-row angular ball bearing, and the rolling elements 55 are made of balls and are held by a cage 56 for each row.
- the rolling surfaces 53 and 54 have a circular arc cross section, and the rolling surfaces 53 and 54 are formed so that the contact angles are aligned with the back surface.
- An end on the outboard side of the bearing space between the outer member 51 and the inner member 52 is sealed with a seal member 57.
- the outer member 51 is a stationary raceway, has a flange 51a attached to the housing 83b on the outboard side of the speed reducer 7, and is formed as an integral part as a whole.
- the flange 51a is provided with bolt insertion holes 64 at a plurality of locations in the circumferential direction.
- the housing 83b is provided with a bolt screw hole 94 whose inner periphery is threaded at a position corresponding to the bolt insertion hole 64.
- the outer member 51 is attached to the housing 83b by screwing the mounting bolt 65 inserted into the bolt insertion hole 94 into the bolt screwing hole 94.
- the inner member 52 is a rotating raceway, and the outboard side member 59 having a hub flange 59a for wheel mounting and the outboard side member 59 are fitted to the inner periphery of the outboard side member 59.
- the inboard side material 60 is integrated with the outboard side material 59 by fastening.
- the rolling surface 54 of each row is formed in each of the outboard side material 59 and the inboard side material 60.
- a through hole 61 is provided in the center of the inboard side member 60.
- the hub flange 59a is provided with press-fit holes 67 for hub bolts 66 at a plurality of locations in the circumferential direction.
- a cylindrical pilot portion 63 that guides driving wheels and braking components (not shown) protrudes toward the outboard side.
- a cap 68 that closes the outboard side end of the through hole 61 is attached to the inner periphery of the pilot portion 63.
- the speed reducer 7 is a cycloid speed reducer, and two curved plates 84a and 84b formed with a wavy trochoid curve having a gentle outer shape as shown in FIG.
- the shaft 82 is attached to each eccentric part 82a, 82b.
- a plurality of outer pins 86 for guiding the eccentric movements of the curved plates 84a and 84b on the outer peripheral side are provided across the housing 83b, and a plurality of inner pins 88 attached to the inboard side member 60 of the inner member 2 are provided.
- the curved plates 84a and 84b are engaged with a plurality of circular through holes 89 provided in the inserted state.
- the rotation input shaft 82 is spline-coupled with the rotation output shaft 74 of the motor 6 and rotates integrally.
- the rotary input shaft 82 is supported at both ends by two bearings 90 on the inboard side housing 83a and the inner diameter surface of the inboard side member 60 of the inner member 52.
- the curved plates 84a and 84b attached to the rotation input shaft 82 that rotates together with the motor 6 perform an eccentric motion.
- the eccentric motions of the curved plates 84 a and 84 b are transmitted to the inner member 52 as rotational motion by the engagement of the inner pins 88 and the through holes 89.
- the rotation of the inner member 52 is decelerated with respect to the rotation of the rotation output shaft 74. For example, a reduction ratio of 10 or more can be obtained with a single-stage cycloid reducer.
- the two curved plates 84a and 84b are attached to the eccentric portions 82a and 82b of the rotary input shaft 82 so as to cancel out the eccentric motion with each other, and are mounted on both sides of the eccentric portions 82a and 82b.
- a counterweight 91 that is eccentric in the direction opposite to the eccentric direction of the eccentric portions 82a and 82b is mounted so as to cancel the vibration caused by the eccentric movement of the curved plates 84a and 84b.
- bearings 92 and 93 are mounted on the outer pins 86 and the inner pins 88, and outer rings 92a and 93a of the bearings 92 and 93 are respectively connected to the curved plates 84a and 84b. It comes into rolling contact with the outer periphery and the inner periphery of each through-hole 89. Therefore, the contact resistance between the outer pin 86 and the outer periphery of each curved plate 84a, 84b and the contact resistance between the inner pin 88 and the inner periphery of each through hole 89 are reduced, and the eccentric motion of each curved plate 84a, 84b is smooth. Can be transmitted to the inner member 52 as a rotational motion.
- the motor 6 is a radial gap type IPM motor in which a radial gap is provided between a motor stator 73 fixed to a cylindrical motor housing 72 and a motor rotor 75 attached to the rotation output shaft 74.
- the rotation output shaft 74 is cantilevered by two bearings 76 on the cylindrical portion of the housing 83 a on the inboard side of the speed reducer 7.
- the motor stator 73 includes a stator core portion 77 and a coil 78 made of a soft magnetic material.
- the stator core portion 77 is held by the motor housing 72 with its outer peripheral surface fitted into the inner peripheral surface of the motor housing 72.
- the motor rotor 75 includes a rotor core portion 79 that is fitted on the rotation output shaft 74 concentrically with the motor stator 73, and a plurality of permanent magnets 80 that are built in the rotor core portion 79.
- the motor 6 is provided with an angle sensor 42 that detects a relative rotation angle between the motor stator 73 and the motor rotor 75.
- the angle sensor 42 detects and outputs a signal representing a relative rotation angle between the motor stator 73 and the motor rotor 75, and an angle calculation circuit 71 that calculates an angle from the signal output from the angle sensor body 70.
- the angle sensor main body 70 includes a detected portion 70a provided on the outer peripheral surface of the rotation output shaft 74, and a detecting portion 70b provided in the motor housing 72 and disposed in close proximity to the detected portion 70a, for example, in the radial direction. Become.
- the detected part 70a and the detecting part 70b may be arranged close to each other in the axial direction.
- each angle sensor 42 a magnetic encoder or a resolver is used as each angle sensor 42.
- the rotation control of the motor 6 is performed by the motor control unit 29 (FIGS. 1 and 2).
- each phase of each wave of alternating current flowing through the coil 78 of the motor stator 73 based on the relative rotation angle between the motor stator 73 and the motor rotor 75 detected by the angle sensor 42.
- the motor current wiring of the in-wheel motor driving device 8 and various sensor system and command system wiring are collectively performed by a connector 99 provided in the motor housing 72 or the like.
- the load sensor 41 shown in FIG. 2 includes, for example, a plurality of sensor units 120 shown in FIG. 8 and a signal processing unit 130 that processes output signals of these sensor units 120.
- the sensor unit 120 is provided at four locations on the outer diameter surface of the outer member 51 that is a stationary raceway in the wheel bearing 4.
- FIG. 8 shows a front view of the outer member 1 viewed from the outboard side.
- these sensor units 120 are provided on the upper surface portion, the lower surface portion, the right surface portion, and the left surface portion of the outer diameter surface of the outer member 51 that is in the vertical position and the horizontal position with respect to the tire ground contact surface.
- the signal processing unit 130 may be provided on the outer member 51, or may be provided on the motor control unit 29 of the inverter device 22.
- the signal processing unit 130 compares the outputs of the four sensor units 120 described above, and acts on each load acting on the wheel bearing 4, specifically, between the road surface of the wheel 2 and the tire according to a predetermined arithmetic expression.
- a straight direction load F z as a load, a vehicle traveling direction load F x as a driving force or a braking force, and an axial load F y are calculated and output.
- Four sensor units 120 are provided. Since they are equally arranged with a phase difference of 90 degrees in the circumferential direction, the vertical load F z , the vehicle traveling direction load F x , and the axial load F y acting on the wheel bearing 4 can be accurately estimated.
- the vertical load F z is obtained by comparing the outputs of the two upper and lower sensor units 120
- the vehicle traveling direction load F x is obtained by comparing the outputs of the two front and rear sensor units 120
- the axial load F y is obtained by comparing the outputs of the four sensor units 120.
- the calculation of the loads F x , F y , and F z by the signal processing unit 130 can be performed with high accuracy by setting arithmetic expressions and parameters based on values obtained by tests and simulations. . More specifically, various corrections are performed for the above calculation, but the description of the correction is omitted.
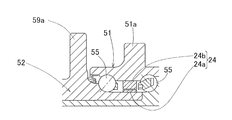
- Each of the sensor units 120 is, for example, as shown in an enlarged plan view and an enlarged cross-sectional view in FIGS. 9 and 10, and the distortion generating member 121 and attached to the distortion generating member 121 to detect the distortion of the distortion generating member 121.
- the strain sensor 122 The strain generating member 121 is made of an elastically deformable metal plate having a thickness of 3 mm or less, such as a steel material, and has a planar shape of a strip having a uniform width over the entire length, and has notches 121b on both sides of the center. Further, the strain generating member 121 has two contact fixing portions 121 a that are fixed to the outer diameter surface of the outer ring 1 through spacers 123 at both ends.
- the strain sensor 122 is affixed to the strain generating member 121 at a location where the strain increases with respect to the load in each direction.
- the location the central portion sandwiched between the notch portions 121b on both sides on the outer surface side of the strain generating member 121 is selected, and the strain sensor 122 measures the circumferential strain around the notch portion 121b. To detect.
- the two contact fixing portions 121a of the strain generating member 121 are positioned at the same size in the axial direction of the outer ring 1, and the two contact fixing portions 121a are located at positions separated from each other in the circumferential direction.
- These contact fixing portions 121a are fixed to the outer diameter surface of the outer ring 1 by bolts 124 through spacers 123, respectively.
- Each of the bolts 124 is inserted into a bolt insertion hole 126 of the spacer 123 from a bolt insertion hole 125 provided in the contact fixing portion 121a in the radial direction, and a screw hole 127 provided in an outer peripheral portion of the outer member 51. Screwed on.
- the central portion having the notch portion 121b in the thin plate-shaped strain generating member 121 is located outside the outer ring 1. It becomes a state away from the radial surface, and distortion deformation around the notch 121b becomes easy.
- an axial position that is the periphery of the rolling surface 53 of the outboard side row of the outer member 51 is selected here.
- the periphery of the rolling surface 53 of the outboard side row is a range from the intermediate position of the rolling surface 53 of the inboard side row and the outboard side row to the formation portion of the rolling surface 53 of the outboard side row. It is.
- a flat portion 1b is formed at a location where the spacer 123 is contacted and fixed on the outer diameter surface of the outer member 51.
- strain sensors 122 can be used.
- the strain sensor 122 can be composed of a metal foil strain gauge.
- the distortion generating member 121 is usually fixed by adhesion.
- the strain sensor 122 can be formed on the strain generating member 121 with a thick film resistor.
- FIG. 11 shows an example of the rotation sensor 24 shown in FIGS.
- the rotation sensor 24 includes a magnetic encoder 24a provided on the outer periphery of the inner member 52 in the wheel bearing 4, and a magnetic sensor 24b provided on the outer member 51 so as to face the magnetic encoder 24a.
- the magnetic ender 24a is a ring-shaped member in which magnetic poles N and S are alternately magnetized in the circumferential direction.
- the rotation sensor 24 is disposed between both rows of rolling elements 55, 55, but may be installed at the end of the wheel bearing 4.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Power Engineering (AREA)
- Sustainable Energy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Regulating Braking Force (AREA)
Abstract
回生ブレーキ(34)と、機械式ブレーキ(9)とを備えた電気自動車であって、車輪用軸受(4)に、路面・タイヤ間に作用する車両進行方向の荷重を検出する荷重センサ(41)を設けると共に、荷重対応回生ブレーキ制限手段(36)を設ける。この荷重対応回生ブレーキ制限手段(36)は、荷重センサ(41)の出力が設定値に達したときに、回生ブレーキ(34)の制動トルクを減じる。また、車輪回転数とバッテリの充電状態から回生ブレーキ(34)の可能最大回生制動トルクを計算し、指令範囲内で回生ブレーキ(34)の制動トルクを最大に作動させる最大作動手段(35)を設ける。
Description
本出願は、2011年11月22日出願の特願2011-254570の優先権を主張するものであり、その全体を参照により本願の一部をなすものとして引用する。
この発明は、車輪を駆動するモータを備えたバッテリ駆動、燃料電池駆動等のインホイールモータ車両のような電気自動車に関する。
電気自動車では、限られたバッテリ容量下で航続距離を向上させるため、IPM型のモータ(埋込磁石型同期モータ)が利用されることが多い。このモータの特徴は、容易に回生ブレーキを作用させられる点にあり、航続距離が重要な場合では、可能な限りこの回生ブレーキを利用したい。この技術分野における先行技術として、例えば特許文献1がある。
回生ブレーキは、車輪を直接に制動するため、摩擦ブレーキに比べ、掛け過ぎるとタイヤがスリップすることがあり、適切な利かせ方が課題となっている。特に、インホイールモータ駆動装置では、その制動トルクが直に各車輪に伝達されるため、他の車輪間とのトルク配分ができず、そのためタイヤのスリップは極力避けることが必要である。回生ブレーキを、スリップが生じないように適切に利かせるにつき、モータの駆動トルクや車輪回転速度の検出値から、機械式ブレーキと回生ブレーキとのうちの、回生ブレーキ配分を制御することは可能である。しかし、走行中に車輪が路面に対して瞬間的に浮いているような場合も多く、また路面状態によってタイヤと路面間の摩擦係数も変わる。そのため、モータの駆動トルクや車輪回転速度の検出値のみでは、回生ブレーキの適切な制御が難しい。
この発明の目的は、可能な限り回生ブレーキを使用し、かつ回生ブレーキの掛け過ぎによるタイヤのスリップを防止できる電気自動車を提供することである。以下、この発明の概要について、実施形態を示す図面中の符号を用いて説明する。
この発明の電気自動車は、車輪2を駆動するモータ6と、このモータ6を制御するモータコントロール部29と、このモータコントロール部29に設けられ前記モータ6の発電により前記車輪2に回生制動力を与える回生ブレーキ34と、前記車輪2に機械的に制動力を与える機械式ブレーキ9とを備えた電気自動車であって、前記車輪2を支持する車輪用軸受4に設けられ、路面・タイヤ間に作用する車両進行方向の荷重を検出する荷重センサ41と、前記荷重センサ41の出力が設定値に達したときに前記回生ブレーキ34の制動トルクを減じる荷重対応回生ブレーキ制限手段36と、を備えたものである。
この構成によると、荷重対応回生ブレーキ制限手段36は、路面・タイヤ間に作用する車両進行方向の荷重が設定値に達したときに、回生ブレーキ34の制動トルクを減じる。このように、路面・タイヤ間に作用する荷重に応じて回生ブレーキ34の制動トルクを減じるため、回生ブレーキ34の掛け過ぎによるタイヤのスリップを防止することができる。特に、実際に作用している路面・タイヤ間の荷重に応じて回生ブレーキ34の利きを制限するため、モータ6の駆動トルクや車輪回転速度の検出値から制限する場合と異なり、路面状態の違いやタイヤの路面からの浮き上がり等に対して、適切な制御を迅速に行える。したがって、可能な限り回生ブレーキ34を使用するようにしても、回生ブレーキ34の掛け過ぎによるタイヤのスリップを防止することができる。
前記荷重対応回生ブレーキ制限手段36は、前記荷重センサ41の出力が設定値に達して回生ブレーキ34の制動トルクを減じた後、荷重センサ41の出力が前記設定値よりも低い復帰用の設定値以下になったときに、前記回生ブレーキ34の制動トルクを減じる制御を解除するのが良い。路面・タイヤ間の進行方向荷重が低下したときは、回生ブレーキ34による制動トルクを減じる必要がなく、その減じる制御を解除することで、回生ブレーキ34をできるだけ多く使用してエネルギ回収が行える。
この発明において、ブレーキ操作手段17から、車両全般を制御する電気制御ユニットであるECU21を介して前記モータコントロール部29に回生制動トルク指令が与えられたときに、定められた規則に従い、車輪2の回転数とバッテリ19の充電状態から前記回生ブレーキ34の可能最大回生制動トルクを計算し、その可能最大回生制動トルクが前記回生制動トルク指令未満であれば、前記回生制動トルク指令に対して前記回生ブレーキ34の制動トルクを最大に作動させる最大作動手段35を前記モータコントロール部29に設け、前記荷重対応回生ブレーキ制限手段36は、前記最大作動手段35の制御に優先して前記回生ブレーキ34の制動トルクを減じる機能を生じさせるようにしても良い。
回生ブレーキ34は、バッテリ19の充電率が高い場合や、充電可能な残容量が少ない場合、効果的に制動が行えないが、前記最大作動手段35は、可能最大回生制動トルクを計算し、その範囲で回生ブレーキ34の制動トルクを最大に作動させる。このため、回生ブレーキ34による制動トルクの不足の問題を生じることなく、可能な限り回生ブレーキ34を使用することができる。このように、バッテリ19の充電状況を監視しながら、可能な限り回生ブレーキ34を使用し、その上で、前記荷重対応回生ブレーキ制限手段36による回生ブレーキ34の利き過ぎによるスリップ防止を行うため、スリップ防止を確実にしながら、より一層、回生ブレーキ34の使用を高めることができる。
この発明において、前記モータコントロール部29に、前記回生ブレーキ34が機能する回生制動トルクの値を前記ECU21に報告する報告手段37を設け、前記ECU21に、前記報告手段37から報告された回生制動トルクの値と前記モータコントロール部29に与えた回生制動トルク指令との差分となる制動トルクを前記機械式ブレーキ9に加えさせる制動力配分手段38を設けるのが良い。荷重対応回生ブレーキ制限手段36による回生トルクの低減を行った場合や、最大作動手段35の計算した可能最大回生制動トルクから、回生ブレーキ34が回生トルク指令の回生制動トルクを得ることができない場合等は、車両全般を制御する電気制御ユニットであるECU21に報告することで、ECU21による各種の制御を適切に行える。特に、制動力配分手段38により、低減後の回生制動トルクの値と回生制動トルク指令との差分となる制動トルクを機械式ブレーキ9に与えることで、回生制動トルクを低減させても、車両の総制動トルクを確保することができる。
この発明において、前記荷重センサ41は、前記車両進行方向の荷重に加えて、路面・タイヤ間に作用する車幅方向の荷重を検出する機能を有するものとし、前記荷重対応回生ブレーキ制限手段36は、前記荷重センサ41の出力する前記車両進行方向の荷重と車幅方向の荷重とから、設定規則により演算された値が設定値に達した場合に、前記回生ブレーキ34の制動トルクを減じるものとしても良い。車両が曲線路を走行するときは、左右の車輪2における車両進行方向の路面・タイヤ間の荷重が異なり、また路面・タイヤ間に車幅方向の荷重が作用する。このため、車幅方向の荷重と車両進行方向の荷重との両方を用いて荷重対応回生ブレーキ制限手段36による回生制動トルクの低減可否を判定させることで、より確実に、可能な限り回生ブレーキ34を使用し、かつ回生ブレーキ34の掛け過ぎによるタイヤのスリップを防止することができる。
この発明において、前記モータ6は、一部または全体が車輪2内に配置されて前記モータ6と車輪用軸受4を含むインホイールモータ駆動装置8を構成するものであっても良い。このインホイールモータ駆動装置8は、前記モータ6の回転を減速して車輪に伝える減速機7を含むものであっても良い。インホイールモータ駆動装置8では、回生ブレーキ34の制動トルクが直に車輪2に伝達されるために、他の車輪2,3間とのトルク配分ができず、そのためタイヤのスリップは極力避けることが必要である。そのため、この発明によるスリップ防止の効果がより一層効果的である。
インホイールモータ駆動装置8を用いる場合に、インバータ装置22と前記インホイールモータ駆動装置8とでインホイールモータユニット30を構成し、前記インバータ装置22は、前記モータコントロール部29、およびこのモータコントロール部29により制御されて前記モータ6に駆動電流を流すパワー回路部28を含み、前記モータコントロール部29に前記荷重対応回生ブレーキ制限手段36を設けても良い。このように、インホイールモータユニット30に備えられたインバータ装置22のモータコントロール部29に前記荷重対応回生ブレーキ制限手段36を設けることで、車両全体を制御するECU21の構成や制御の簡素が図れる。例えば、インホイールモータ駆動装置8の設計変更等を行った場合も、ECU21の設計変更を不要とするか、あるいは僅かで済むようにできる。
請求の範囲および/または明細書および/または図面に開示された少なくとも2つの構成のどのような組合せも、本発明に含まれる。特に、請求の範囲の各請求項の2つ以上のどのような組合せも、本発明に含まれる。
この発明は、添付の図面を参考にした以下の好適な実施形態の説明から、より明瞭に理解されるであろう。しかしながら、実施形態および図面は単なる図示および説明のためのものであり、この発明の範囲を定めるために利用されるべきものではない。この発明の範囲は添付の請求の範囲によって定まる。添付図面において、複数の図面における同一の符号は、同一または相当する部分を示す。
この発明の一実施形態に係る電気自動車を平面図で示す概念構成のブロック図である。
同電気自動車のインホイールモータユニットの概念構成を示すブロック図である。
同電気自動車におけるECUの制動力配分手段の制御を示す流れ図である。
同電気自動車における最大作動手段35および荷重対応回生ブレーキ制限手段の制御を示す流れ図である。
同電気自動車のバッテリ充電可能量と回生制動トルク、機械式制動トルクの関係を示すグラフである。
同電気自動車におけるインホイールモータ駆動装置の破断正面図である。
図5のVI-VI 線断面図である。
図6の部分拡大断面図である。
同電気自動車における車輪用軸受の外方部材の側面図と荷重検出用の信号処理ユニットとを組み合わせた図である。
同電気自動車におけるセンサユニットの拡大平面図である。
同センサユニットの縦断面図である。
同電気自動車における回転検出器の一例の縦断面図である。
この発明の一実施形態を図1ないし図11と共に説明する。この電気自動車は、車体1の左右の後輪となる車輪2が駆動輪とされ、左右の前輪となる車輪3が従動輪の操舵輪とされた4輪の自動車である。駆動輪および従動輪となる車輪2,3は、いずれもタイヤを有し、それぞれ車輪用軸受4,5を介して車体1に支持されている。車輪用軸受4,5は、図1ではハブベアリングの略称「H/B」を付してある。駆動輪となる左右の車輪2,2は、それぞれ独立の走行用のモータ6,6により駆動される。モータ6の回転は、減速機7および車輪用軸受4を介して車輪2に伝達される。これらモータ6、減速機7、および車輪用軸受4は、互いに一つの組立部品であるインホイールモータ駆動装置8を構成しており、インホイールモータ駆動装置8は、一部または全体が車輪2内に配置される。モータ6は、減速機7を介さずに直接に車輪2を回転駆動するものであっても良い。各インホイールモータ駆動装置8は、後述のインバータ装置22と共に、インホイールモータユニット30を構成する。各車輪2,3には、電動式等の摩擦ブレーキである機械式のブレーキ9,10が設けられている。
左右の前輪となる操舵輪である車輪3,3は、転舵機構11を介して転舵可能であり、操舵機構12により操舵される。転舵機構11は、タイロッド11aを左右移動させることで、車輪用軸受5を保持した左右のナックルアーム11bの角度を変える機構であり、EPS(電動パワーステアリング)モータ13により、回転・直線運動変換機構(図示せず)を介して左右移動させられる。操舵機構12は、タイロッド11aと機械的に連結されていないステアリングホイール14の操舵角を操舵角センサ15で検出し、その検出した操舵角である旋回指令によりEPSモータ13に駆動指令を与えられるステアバイワイヤ式とされている。
制御系を説明する。自動車全般の制御を行う電気制御ユニットであるメインのECU21と、このECU21の指令に従って走行用のモータ6の制御を行うインバータ装置22と、ブレーキコントローラ23とが、車体1に搭載されている。ECU21は、コンピュータとこれに実行されるプログラム、並びに各種の電子回路等で構成される。
ECU21は、機能別に大別すると駆動制御部21aと一般制御部21bとに分けられる。駆動制御部21aは、アクセル操作部16の出力する加速指令と、ブレーキ操作部17の出力する減速指令と、操舵角センサ15の出力する旋回指令とから、左右輪の走行用モータ6,6に与える加速・減速指令を生成し、インバータ装置22へ出力する。駆動制御部21aは、上記の他に、出力する加速・減速指令を、各車輪2,3の車輪用軸受4,5に設けられた回転センサ24から得られるタイヤ回転数の情報や、車載の各センサの情報を用いて補正する機能を有していても良い。アクセル操作部16は、アクセルペダルとその踏み込み量を検出して前記加速指令を出力するセンサ16aとでなる。ブレーキ操作部17は、ブレーキペダルとその踏み込み量を検出して前記減速指令を出力するセンサ17aとでなる。
ECU21の一般制御部21bは、各種の補機システム25を制御する機能、コンソールの操作パネル26からの入力指令を処理する機能、表示手段27に表示を行う機能などを有する。前記補機システム25は、例えば、エアコン、ライト、ワイパー、GPS、エアバッグ等であり、ここでは代表して一つのブロックとして示す。
ブレーキコントローラ23は、ECU21から出力される制動指令に従って、各車輪2,3の機械式のブレーキ9,10に制動指令を与える手段であり、制動専用のECUとなる電子回路やマイコン等により構成される。メインのECU21から出力される制動指令には、ブレーキ操作部17の出力する減速指令によって生成される指令の他に、ECU21の持つ安全性向上のための手段によって生成される指令がある。ブレーキコントローラ23は、この他にアンチロックブレーキシステムを備える。
インバータ装置22は、各モータ6に対して設けられたパワー回路部28と、このパワー回路部28を制御するモータコントロール部29とで構成される。モータコントロール部29は、各パワー回路部28に対して共通して設けられていても、別々に設けられていても良いが、共通して設けられた場合であっても、各パワー回路部28を、例えば互いにモータトルクが異なるように独立して制御可能なものとされる。モータコントロール部29は、このモータコントロール部29が持つインホイールモータ駆動装置8に関する各検出値や制御値等の各情報(「IWMシステム情報」と称す)をECU21に出力する機能を有する。この実施形態では、モータコントロール部29は、各パワー回路部28に対して別々に設けられ、これらパワー回路部28とモータコントロール部29とでなるインバータ装置22と、その制御対象のモータ6を含むインホイールモータ駆動装置8とで、前述のようにインホイールモータユニット30が構成される。
図2は、インホイールモータユニット30の概念構成を示すブロック図である。インバータ装置22のパワー回路部28は、バッテリ19の直流電力をモータ6の駆動に用いる3相の交流電力に変換するインバータ31と、このインバータ31を制御するPWMドライバ32とで構成される。モータ6は3相の同期モータ、例えばIPM型(埋込磁石型)同期モータ等からなる。インバータ31は、複数の半導体スイッチング素子(図示せず)で構成され、PWMドライバ32は、入力された電流指令をパルス幅変調し、前記各半導体スイッチング素子にオンオフ指令を与える。
モータコントロール部29は、コンピュータとこれに実行されるプログラム、および電子回路により構成され、その基本となる制御部として基本駆動制御部33を有している。基本駆動制御部33は、上位制御手段であるECU21から与えられるトルク指令等による加速・減速指令に従い、電流指令に変換して、パワー回路部28のPWMドライバ32に電流指令を与える手段である。基本駆動制御部33は、インバータ31からモータ6に流すモータ電流値を電流検出手段39から得て、電流フィードバック制御を行う。また、モータ駆動制御部33は、モータ6のロータの回転角を角度センサ42から得て、ベクトル制御等の回転角に応じた制御を行う。
この実施形態では、モータコントロール部29に、次の回生ブレーキ34、最大作動手段35、荷重対応回生ブレーキ制限手段36、および報告手段37を設け、かつECU21に制動力配分手段38を設けている。
回生ブレーキ34は、モータ6の発電により車輪2に回生制動力を与える手段であり、ECU21の制動力配分手段38から与えられた回生制動トルク指令により、基本駆動制御部33で出力する駆動トルクを減じさせる制御を行う。また、回生ブレーキ34は、モータ6の発電した電力を、インバータ31を介してバッテリ19に充電させる機能を有する。
最大作動手段35は、ブレーキ操作手段17から、ECU21の制動力配分手段38を介してモータコントロール部29に回生制動トルク指令が与えられたときに、数式等で定められた規則に従い、車輪2の回転数とバッテリ19の充電状態から、回生ブレーキ34の可能最大回生制動トルクを計算し、その可能最大回生制動トルクが前記回生制動トルク指令未満であれば、前記回生制動トルク指令に対して回生ブレーキ34の制動トルクを最大に作動させる手段である。最大作動手段35において、車輪2の回転数は、例えば、車輪用軸受4に設けられた回転センサ24の出力を用いて認識し、またバッテリ19の充電状態は、バッテリ19に設けられた充電状態検出手段(図示せず)の出力によって認識する。ここで言うバッテリ19の充電状態は、充電率であっても、残りの充電可能容量であっても良い。
荷重対応回生ブレーキ制限手段36は、荷重センサ41で検出される、路面・タイヤ間に作用する車両進行方向の荷重Fx の値が制限用の設定値に達したときに、回生ブレーキ34の制動トルクを減じる手段である。荷重対応回生ブレーキ制限手段36は、前記最大作動手段35の制御に優先して回生ブレーキ34の制動トルクを減じる機能を生じさせる。また、荷重対応回生ブレーキ制限手段36は、荷重センサ41の出力が前記制限用の設定値に達して回生ブレーキ34の制動トルクを減じた後、前記設定値よりも低い復帰用の設定値に達したときに、回生ブレーキ34の制動トルクを減じる制御を解除する。前記設定値、および回生ブレーキ34の制動トルクをどの程度に減じるかについては、シミュレーション等により適宜考察して設定される。荷重センサ41は、後に具体例を示すように、車輪用軸受4に設けられる。
荷重対応回生ブレーキ制限手段36は、荷重センサ41の出力する前記車両進行方向の荷重Fx に対応する制御に加え、荷重センサ41の出力する車両進行方向の荷重Fx と車幅方向の荷重Fy とから、設定規則により演算された値が設定値に達した場合に、前記回生ブレーキの制動トルクを減じるものとしても良い。この場合、荷重センサ41は、車両進行方向の荷重Fx に加えて、路面・タイヤ間に作用する車幅方向の荷重Fy を検出する機能を有するものとするか、または車幅方向の荷重Fy を検出する別の荷重センサ(図示せず)を設ける。
報告手段37は、回生ブレーキ34が機能する回生制動トルクの値をECUに報告する手段である。
ECU21の制動力配分手段38は、ブレーキ操作手段17から減速指令として与えられる全制動トルクの指令を、回生ブレーキ34による回生制動トルク指令と、機械式ブレーキ9,10に対する制動トルク指令とに分配する手段である。この制動力配分手段38は、報告手段37から報告された回生制動トルクの値と前記モータコントロール部29に与えた回生制動トルク指令との差分となる制動トルクを、機械式ブレーキ9,10に与える制動トルクに加える制御を行う。制動力配分手段38により機械式ブレーキ9,10に与える制動トルクの指令は、ブレーキコントローラ23を介して機械式ブレーキ9,10に与えられる。
次に、上記構成による制動動作と上記各手段35~38の機能の詳細とを説明する。図3Aは、ECU21の制動力配分手段38の制御を示し、図3Bは、最大作動手段35および荷重対応回生ブレーキ制限手段36の制御を示す。図3Aにおいて、ブレーキ操作手段17の減速指令が制動トルク指令としてECU21に入力されると(ステップS1)、制動力配分手段38は前記制動トルク指令を、各車輪2のモータ6のモータコントロール部29に分配して出力する(S2)。このとき、制動力配分手段38は、急ブレーキ等を除く定められた通常範囲の制動トルクの場合は、ブレーキ操作手段17の制動トルク指令を、全て回生制動トルク指令として出力し、機械式ブレーキ9,10には制動トルク指令を与えない。この後、制動力配分手段38は、各回生ブレーキ34の報告手段37からの報告を待つ(S3)。
モータコントロール部29の最大作動手段35は、制動力配分手段38からの回生制動トルク指令が入力されると(図3BのステップR1)、車輪2の回転数とバッテリ19の充電状態から、回生ブレーキ34の可能最大回生制動トルクを計算する(R2)。この計算は、数式等で定められた規則に従って行われる。
図4に示すように、可能最大回生制動トルクτBRM は、ある程度の以上のバッテリ充電可能量の場合は、バッテリ充電可能量に比例して大きくなる。この計算の後、最大作動手段35は、可能最大回生制動トルクτBRM と回生制動トルク指令τBRO とを比較し(R3)、可能最大回生制動トルクτBRM が回生制動トルク指令τBRO 未満であれば、回生制動トルク指令τBRO に対して回生ブレーキ34の制動トルクを最大に作動させる(R4)。不足分は機械式ブレーキ9,10を動作させることになる。すなわち、必要な制動トルクτBRを、回生制動トルクτBRと機械式ブレーキ9,10の制動トルクτBRS とで分担する。可能最大回生制動トルクτBRM が回生制動トルク指令τBRO 以上であれば、回生制動トルク指令τBRO 分の回生制動トルクを回生ブレーキ34により発生させる(R5)。
また、荷重対応回生ブレーキ制限手段36は、モータコントロール部29に回生制動トルク指令が入力されると、荷重センサ41で検出される、路面・タイヤ間に作用する車両進行方向の荷重Fx の値と制限用の設定値とを比較し、車両進行方向の荷重Fx が設定値に達したときは、回生ブレーキ34の制動トルクを減じる(R6)。この制動トルクを減じる制御は、最大作動手段35の制御に優先して行う。この後、報告手段37は、回生ブレーキ34が機能する回生制動トルクの値をECU21に報告する(R7)。
ECU21の制動力配分手段38は、報告手段37から報告された回生制動トルクの値とモータコントロール部29に与えた回生制動トルク指令との差分となる制動トルクを、ブレーキコントローラ23を介して機械式ブレーキ9,10に与える(S4)。ブレーキコントローラ23は、原則的には、回生制動トルクを減じた車輪2の機械式ブレーキ9に、その減じた分の制動トルクを加えるように制御するが、他の機械式ブレーキ9,10にも、前記の回生制動トルクを減じた分の制動トルクを分配しても良い。
なお、図3Aおよび図3Bの流れ図では図示を省略したが、荷重対応回生ブレーキ制限手段36は、荷重センサ41の出力が前記制限用の設定値に達して回生ブレーキ34の制動トルクを減じた後、荷重センサ41の出力が前記設定値よりも低い復帰用の設定値以下になったときは、回生ブレーキ34の制動トルクを減じる制御を解除する。
この構成の電気自動車によると、上記のように、路面・タイヤ間に作用する荷重に応じて回生ブレーキ34の制動トルクを減じるため、回生ブレーキ34の掛け過ぎによるタイヤのスリップを防止することができる。特に、実際に作用している路面・タイヤ間の荷重に応じて回生ブレーキ34の利きを制限するため、モータ6の駆動トルクや車輪回転速度の検出値から制限する場合と異なり、路面状態の違いやタイヤの路面からの浮き上がり等に対して、適切な制御を迅速に行える。したがって、可能な限り回生ブレーキ34を使用するようにしても、回生ブレーキ34の掛け過ぎによるタイヤのスリップを防止することができる。
この実施形態では、インホイールモータ駆動装置8に適用しており、インホイールモータ駆動装置8では、その制動トルクが直に各車輪2に伝達されるため、他の車輪2,3間とのトルク配分ができず、そのためタイヤのスリップは極力避けることが必要である。このため、上記の荷重対応回生ブレーキ制限手段36を設けたことによるスリップ防止作用が、より効果的である。
また、荷重対応回生ブレーキ制限手段36は、荷重センサ41の出力が設定値に達して回生ブレーキ34の制動トルクを減じた後、荷重センサ41の出力が前記設定値よりも低い復帰用の設定値以下になったときは、前記回生ブレーキの制動トルクを減じる制御を解除する。路面・タイヤ間の進行方向荷重が低下したときは、回生ブレーキ34による制動トルクを減じる必要がなく、その減じる制御を解除することで、回生ブレーキをできるだけ多く使用してエネルギ回収が行える。
さらに、最大作動手段35により、次の効果が得られる。回生ブレーキ34は、バッテリ19の充電率が高い場合や、充電可能な残容量が少ない場合、効果的に制動が行えないが、最大作動手段35は可能最大回生制動トルクτBRM を計算し、その範囲で回生ブレーキ34の制動トルクを最大に作動させる。このため、回生ブレーキ34による制動トルクの不足の問題を生じることなく、可能な限り回生ブレーキ34を使用することができる。このように、バッテリの充電状況を監視しながら、可能な限り回生ブレーキ34を使用し、その上で、荷重対応回生ブレーキ制限手段36による回生ブレーキ36の利き過ぎによるスリップ防止を行うため、スリップ防止を確実にしながら、より一層、回生ブレーキの使用を高めることができる。
次に、図5~図7と共に、前記インホイールモータ駆動装置8の具体例を示す。このインホイールモータ駆動装置8は、車輪用軸受4とモータ6との間に減速機7を介在させ、車輪用軸受4で支持される駆動輪である車輪2のハブとモータ6の回転出力軸74とを同軸心上で連結してある。減速機7は、サイクロイド減速機であって、モータ6の回転出力軸74に同軸に連結される回転入力軸82に偏心部82a,82bを形成し、偏心部82a,82bにそれぞれ軸受85を介して曲線板84a,84bを装着し、曲線板84a,84bの偏心運動を車輪用軸受4へ回転運動として伝達する構成である。なお、この明細書において、車両に取り付けた状態で車両の車幅方向の外側寄りとなる側をアウトボード側と呼び、車両の中央寄りとなる側をインボード側と呼ぶ。
車輪用軸受4は、内周に複列の転走面53を形成した外方部材51と、これら各転走面53に対向する転走面54を外周に形成した内方部材52と、これら外方部材51および内方部材52の転走面53,54間に介在した複列の転動体55とで構成される。内方部材52は、駆動輪を取り付けるハブを兼用する。この車輪用軸受4は、複列のアンギュラ玉軸受とされていて、転動体55はボールからなり、各列毎に保持器56で保持されている。上記転走面53,54は断面円弧状であり、各転走面53,54は接触角が背面合わせとなるように形成されている。外方部材51と内方部材52との間の軸受空間のアウトボード側端は、シール部材57でシールされている。
外方部材51は静止側軌道輪となるものであって、減速機7のアウトボード側のハウジング83bに取り付けるフランジ51aを有し、全体が一体の部品とされている。フランジ51aには、周方向の複数箇所にボルト挿通孔64が設けられている。また、ハウジング83bには,ボルト挿通孔64に対応する位置に、内周にねじが切られたボルト螺着孔94が設けられている。ボルト挿通孔94に挿通した取付ボルト65をボルト螺着孔94に螺着させることにより、外方部材51がハウジング83bに取り付けられる。
内方部材52は回転側軌道輪となるものであって、車輪取付用のハブフランジ59aを有するアウトボード側材59と、このアウトボード側材59の内周にアウトボード側が嵌合して加締めによってアウトボード側材59に一体化されたインボード側材60とでなる。これらアウトボード側材59およびインボード側材60に、前記各列の転走面54が形成されている。インボード側材60の中心には貫通孔61が設けられている。ハブフランジ59aには、周方向複数箇所にハブボルト66の圧入孔67が設けられている。アウトボード側材59のハブフランジ59aの根元部付近には、駆動輪および制動部品(図示せず)を案内する円筒状のパイロット部63がアウトボード側に突出している。このパイロット部63の内周には、前記貫通孔61のアウトボード側端を塞ぐキャップ68が取り付けられている。
減速機7は、上記したようにサイクロイド減速機であり、図6のように外形がなだらかな波状のトロコイド曲線で形成された2枚の曲線板84a,84bが、それぞれ軸受85を介して回転入力軸82の各偏心部82a,82bに装着してある。これら各曲線板84a,84bの偏心運動を外周側で案内する複数の外ピン86を、それぞれハウジング83bに差し渡して設け、内方部材2のインボード側材60に取り付けた複数の内ピン88を、各曲線板84a,84bの内部に設けられた複数の円形の貫通孔89に挿入状態に係合させてある。回転入力軸82は、モータ6の回転出力軸74とスプライン結合されて一体に回転する。なお、回転入力軸82はインボード側のハウジング83aと内方部材52のインボード側材60の内径面とに2つの軸受90で両持ち支持されている。
モータ6の回転出力軸74が回転すると、これと一体回転する回転入力軸82に取り付けられた各曲線板84a,84bが偏心運動を行う。この各曲線板84a,84bの偏心運動が、内ピン88と貫通孔89との係合によって、内方部材52に回転運動として伝達される。回転出力軸74の回転に対して内方部材52の回転は減速されたものとなる。例えば、1段のサイクロイド減速機で10以上の減速比を得ることができる。
前記2枚の曲線板84a,84bは、互いに偏心運動が打ち消されるように180°位相をずらして回転入力軸82の各偏心部82a,82bに装着され、各偏心部82a,82bの両側には、各曲線板84a,84bの偏心運動による振動を打ち消すように、各偏心部82a,82bの偏心方向と逆方向へ偏心させたカウンターウエイト91が装着されている。
図7に拡大して示すように、前記各外ピン86と内ピン88には軸受92,93が装着され、これらの軸受92,93の外輪92a,93aが、それぞれ各曲線板84a,84bの外周と各貫通孔89の内周とに転接するようになっている。したがって、外ピン86と各曲線板84a,84bの外周との接触抵抗、および内ピン88と各貫通孔89の内周との接触抵抗を低減し、各曲線板84a,84bの偏心運動をスムーズに内方部材52に回転運動として伝達することができる。
図5において、モータ6は、円筒状のモータハウジング72に固定したモータステータ73と、回転出力軸74に取り付けたモータロータ75との間にラジアルギャップを設けたラジアルギャップ型のIPMモータである。回転出力軸74は、減速機7のインボード側のハウジング83aの筒部に2つの軸受76で片持ち支持されている。
モータステータ73は、軟質磁性体からなるステータコア部77とコイル78とでなる。ステータコア部77は、その外周面がモータハウジング72の内周面に嵌合して、モータハウジング72に保持されている。モータロータ75は、モータステータ73と同心に回転出力軸74に外嵌するロータコア部79と、このロータコア部79に内蔵される複数の永久磁石80とでなる。
モータ6には、モータステータ73とモータロータ75の間の相対回転角度を検出する角度センサ42が設けられる。角度センサ42は、モータステータ73とモータロータ75の間の相対回転角度を表す信号を検出して出力する角度センサ本体70と、この角度センサ本体70の出力する信号から角度を演算する角度演算回路71とを有する。角度センサ本体70は、回転出力軸74の外周面に設けられる被検出部70aと、モータハウジング72に設けられ前記被検出部70aに例えば径方向に対向して近接配置される検出部70bとでなる。被検出部70aと検出部70bは軸方向に対向して近接配置されるものであっても良い。ここでは、各角度センサ42として、磁気エンコーダまたはレゾルバが用いられる。モータ6の回転制御は上記モータコントロール部29(図1,2)により行われる。このモータ6では、その効率を最大にするため、角度センサ42の検出するモータステータ73とモータロータ75の間の相対回転角度に基づき、モータステータ73のコイル78へ流す交流電流の各波の各相の印加タイミングを、モータコントロール部29のモータ駆動制御部33によってコントロールするようにされている。なお、インホイールモータ駆動装置8のモータ電流の配線や各種センサ系,指令系の配線は、モータハウジング72等に設けられたコネクタ99により纏めて行われる。
図2に示す前記荷重センサ41は、例えば図8に示す複数のセンサユニット120と、これらセンサユニット120の出力信号を処理する信号処理ユニット130とで構成される。センサユニット120は、車輪用軸受4における静止側軌道輪である外方部材51の外径面の4か所に設けられる。図8は、外方部材1をアウトボード側から見た正面図を示す。ここでは、これらのセンサユニット120が、タイヤ接地面に対して上下位置および左右位置となる外方部材51における外径面の上面部、下面部、右面部、および左面部に設けられている。信号処理ユニット130は、外方部材51に設けられていても良く、まインバータ装置22のモータコントロール部29に設けられていても良い。
信号処理ユニット130は、上記4箇所のセンサユニット120の出力を比較し、定められた演算式に従って、車輪用軸受4に作用する各荷重、具体的には、車輪2の路面・タイヤ間で作用荷重となる直方向荷重Fz 、駆動力や制動力となる車両進行方向荷重Fx 、および軸方向荷重Fy を演算し、出力する。前記センサユニット120を4つ設け、各センサユニット120を、タイヤ接地面に対して上下位置および左右位置となる外方部材51の外径面の上面部、下面部、右面部、および左面部に円周方向90度の位相差で等配しているので、車輪用軸受4に作用する垂直方向荷重Fz 、車両進行方向荷重Fx 、軸方向荷重Fy を精度良く推定することができる。垂直方向荷重Fz は、上下2つのセンサユニット120の出力を比較することで得られ、車両進行方向荷重Fx は、前後2つのセンサユニット120の出力を比較することで得られる。軸方向荷重Fy は、4つのセンサユニット120の出力を比較することで得られる。信号処理ユニット130による上記各荷重Fx ,Fy ,Fz の演算は、試験やシミュレーションで求められた値を基に、演算式やパラメータを設定しておくことで、精度良く行うことができる。なお、より具体的には、上記の演算には各種の補正を行うが、補正については説明を省略する。
上記各センサユニット120は、例えば、図9および図10に拡大平面図および拡大断面図で示すように、歪み発生部材121と、この歪み発生部材121に取り付けられて歪み発生部材121の歪みを検出する歪みセンサ122とでなる。歪み発生部材121は、鋼材等の弾性変形可能な金属製の厚さ3mm以下の薄板材からなり、平面概形が全長にわたり均一幅の帯状で中央の両側辺部に切欠き部121bを有する。また、歪み発生部材121は、外輪1の外径面にスペーサ123を介して接触固定される2つの接触固定部121aを両端部に有する。歪みセンサ122は、歪み発生部材121における各方向の荷重に対して歪みが大きくなる箇所に貼り付けられる。ここでは、その箇所として、歪み発生部材121の外面側で両側辺部の切欠き部121bで挟まれる中央部位が選ばれており、歪みセンサ122は切欠き部121bの周辺の周方向の歪みを検出する。
前記センサユニット120は、その歪み発生部材121の2つの接触固定部121aが、外輪1の軸方向に同寸法の位置で、かつ両接触固定部121aが互いに円周方向に離れた位置に来るように配置され、これら接触固定部121aがそれぞれスペーサ123を介してボルト124により外輪1の外径面に固定される。前記各ボルト124は、それぞれ接触固定部121aに設けられた径方向に貫通するボルト挿通孔125からスペーサ123のボルト挿通孔126に挿通し、外方部材51の外周部に設けられたねじ孔127に螺合させる。このように、スペーサ123を介して外方部材51の外径面に接触固定部121aを固定することにより、薄板状である歪み発生部材121における切欠き部121bを有する中央部位が外輪1の外径面から離れた状態となり、切欠き部121bの周辺の歪み変形が容易となる。接触固定部121aが配置される軸方向位置として、ここでは外方部材51のアウトボード側列の転走面53の周辺となる軸方向位置が選ばれる。ここでいうアウトボード側列の転走面53の周辺とは、インボード側列およびアウトボード側列の転走面53の中間位置からアウトボード側列の転走面53の形成部までの範囲である。外方部材51の外径面における前記スペーサ123が接触固定される箇所には平坦部1bが形成される。
歪みセンサ122としては、種々のものを使用することができる。例えば、歪みセンサ122を金属箔ストレインゲージで構成することができる。その場合、通常、歪み発生部材121に対しては接着による固定が行われる。また、歪みセンサ122を歪み発生部材121上に厚膜抵抗体にて形成することができる。
図11は、図1,図2の回転センサ24の一例を示す。この回転センサ24は、車輪用軸受4における内方部材52の外周に設けられた磁気エンコーダ24aと、この磁気エンコーダ24aに対向して外方部材51に設けられた磁気センサ24bとでなる。磁気エンーダ24aは、円周方向に磁極N,Sを交互に着磁したリング状の部材である。この例では、回転センサ24は両列の転動体55,55間に配置しているが、車輪用軸受4の端部に設置しても良い。
以上のとおり、図面を参照しながら好適な実施形態および応用形態を説明したが、当業者であれば、本件明細書を見て、自明な範囲内で種々の変更および修正を容易に想定するであろう。したがって、そのような変更および修正は、請求の範囲から定まる発明の範囲内のものと解釈される。
1…車体
2,3…車輪
4,5…車輪用軸受
6…モータ
7…減速機
8…インホイールモータ駆動装置
9,10…機械式ブレーキ
11…転舵機構
12…操舵機構
19…バッテリ
21…ECU
22…インバータ装置
24…回転センサ
28…パワー回路部
29…モータコントロール部
30…インホイールモータユニット
31…インバータ
32…PWMドライバ
33…モータ駆動制御部
34…回生ブレーキ
35…最大作動手段
36…荷重対応回生ブレーキ制限手段
37…報告手段
38…制動力配分手段
39…電流検出手段
41…荷重センサ
42…角度センサ
2,3…車輪
4,5…車輪用軸受
6…モータ
7…減速機
8…インホイールモータ駆動装置
9,10…機械式ブレーキ
11…転舵機構
12…操舵機構
19…バッテリ
21…ECU
22…インバータ装置
24…回転センサ
28…パワー回路部
29…モータコントロール部
30…インホイールモータユニット
31…インバータ
32…PWMドライバ
33…モータ駆動制御部
34…回生ブレーキ
35…最大作動手段
36…荷重対応回生ブレーキ制限手段
37…報告手段
38…制動力配分手段
39…電流検出手段
41…荷重センサ
42…角度センサ
Claims (8)
- 車輪を駆動するモータと、このモータを制御するモータコントロール部と、このモータコントロール部に設けられ前記モータの発電により前記車輪に回生制動力を与える回生ブレーキと、前記車輪に機械的に制動力を与える機械式ブレーキとを備えた電気自動車であって、
前記車輪を支持する車輪用軸受に設けられて、路面・タイヤ間に作用する車両進行方向の荷重を検出する荷重センサと、
前記荷重センサの出力が設定値に達したときに前記回生ブレーキの制動トルクを減じる荷重対応回生ブレーキ制限手段と、
を備えた電気自動車。 - 請求項1において、前記荷重対応回生ブレーキ制限手段は、前記荷重センサの出力が設定値に達して回生ブレーキの制動トルクを減じた後、荷重センサの出力が前記設定値よりも低い復帰用の設定値以下になったときに、前記回生ブレーキの制動トルクを減じる制御を解除する電気自動車。
- 請求項1において、さらに、
前記モータコントロール部に、ブレーキ操作手段から、車両全般を制御する電気制御ユニットであるECUを介して前記モータコントロール部に回生制動トルク指令が与えられたときに、定められた規則に従い、車輪の回転数とバッテリの充電状態から前記回生ブレーキの可能最大回生制動トルクを計算し、その可能最大回生制動トルクが前記回生制動トルク指令未満であれば、前記回生制動トルク指令に対して前記回生ブレーキの制動トルクを最大に作動させる最大作動手段を設け、
前記荷重対応回生ブレーキ制限手段は、前記最大作動手段の制御に優先して前記回生ブレーキの制動トルクを減じる機能を生じさせる電気自動車。 - 請求項3において、前記モータコントロール部に、前記回生ブレーキが機能する回生制動トルクの値を前記ECUに報告する報告手段を設け、前記ECUに、前記報告手段から報告された回生制動トルクの値と前記モータコントロール部に与えた回生制動トルク指令との差分となる制動トルクを前記機械式ブレーキに加えさせる制動力配分手段を設けた電気自動車。
- 請求項1において、前記荷重センサは、前記車両進行方向の荷重に加えて、路面・タイヤ間に作用する車幅方向の荷重を検出する機能を有するものとし、前記荷重対応回生ブレーキ制限手段は、前記荷重センサの出力する前記車両進行方向の荷重と車幅方向の荷重とから演算された値が設定値に達した場合に、前記回生ブレーキの制動トルクを減じるものとした電気自動車。
- 請求項1において、前記モータは、一部または全体が車輪内に配置されて前記モータと車輪用軸受を含むインホイールモータ駆動装置を構成する電気自動車。
- 請求項6において、前記インホイールモータ駆動装置は、前記モータの回転を減速して車輪に伝える減速機を含む電気自動車。
- 請求項6において、インバータ装置と前記インホイールモータ駆動装置とでインホイールモータユニットを構成し、前記インバータ装置は、前記モータコントロール部、およびこのモータコントロール部により制御されて前記モータに駆動電流を流すパワー回路部を含み、前記モータコントロール部に前記荷重対応回生ブレーキ制限手段を設けた電気自動車。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201280056936.5A CN103946053B (zh) | 2011-11-22 | 2012-11-21 | 电动汽车 |
| US14/355,735 US9126501B2 (en) | 2011-11-22 | 2012-11-21 | Electric vehicle |
| EP12851360.3A EP2783895A4 (en) | 2011-11-22 | 2012-11-21 | ELECTRIC VEHICLE |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011254570A JP5832868B2 (ja) | 2011-11-22 | 2011-11-22 | 電気自動車 |
| JP2011-254570 | 2011-11-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013077376A1 true WO2013077376A1 (ja) | 2013-05-30 |
Family
ID=48469818
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/080230 WO2013077376A1 (ja) | 2011-11-22 | 2012-11-21 | 電気自動車 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9126501B2 (ja) |
| EP (1) | EP2783895A4 (ja) |
| JP (1) | JP5832868B2 (ja) |
| CN (1) | CN103946053B (ja) |
| WO (1) | WO2013077376A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2876014A1 (en) * | 2013-11-22 | 2015-05-27 | ArvinMeritor Technology, LLC | Vehicle brake system and method of control |
| CN110466361A (zh) * | 2019-08-14 | 2019-11-19 | 东风汽车集团有限公司 | 两轮轮毂电机驱动纯电动汽车整车控制器及控制方法 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5790782B2 (ja) * | 2011-12-09 | 2015-10-07 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP2016533960A (ja) * | 2013-08-29 | 2016-11-04 | ケーピーアイティ テクノロジーズ リミテッド | 車両をハイブリッド電気自動車および電気自動車(ev)の1つに改造するためのレトロフィットシステム |
| DE102013221535A1 (de) * | 2013-10-23 | 2015-04-23 | Bayerische Motoren Werke Aktiengesellschaft | E-Maschinen-Schleppmomentenkompensation |
| KR101526432B1 (ko) * | 2014-07-31 | 2015-06-05 | 현대자동차 주식회사 | 하이브리드 차량의 회생 제동량 연산 장치 및 방법 |
| KR101610121B1 (ko) * | 2014-10-08 | 2016-04-08 | 현대자동차 주식회사 | 전기 자동차의 회생 제동 제어 장치 및 방법 |
| CN104477040B (zh) * | 2014-11-18 | 2016-08-24 | 浙江工业大学之江学院 | 单能量源电动汽车变电流再生制动控制方法 |
| CN106608201B (zh) * | 2015-10-26 | 2019-04-19 | 比亚迪股份有限公司 | 电动车辆及其主动安全控制系统和方法 |
| US9802661B1 (en) * | 2015-11-04 | 2017-10-31 | Zoox, Inc. | Quadrant configuration of robotic vehicles |
| CN107662522B (zh) * | 2016-07-28 | 2019-11-08 | 比亚迪股份有限公司 | 车辆的防滑控制方法、系统及车辆 |
| DE102018212031A1 (de) * | 2018-07-19 | 2020-01-23 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Kraftfahrzeugs, Steuergerät und Kraftfahrzeug |
| US20220194232A1 (en) * | 2019-05-06 | 2022-06-23 | Aikar Technology Inc. | A vehicle braking method and system |
| CN115605370A (zh) * | 2021-04-01 | 2023-01-13 | 朴根浩(Kr) | 电动车制动操作系统 |
| CN116118687B (zh) * | 2023-03-31 | 2024-05-07 | 吉林大学 | 8×8电驱动车辆紧急制动工况下滑移率控制系统及方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005225482A (ja) * | 2004-01-15 | 2005-08-25 | Nissan Motor Co Ltd | 車両の制動制御方法及び装置 |
| JP2006034012A (ja) * | 2004-07-16 | 2006-02-02 | Toyota Motor Corp | 車輪のスリップ率演算方法及び車輪の制駆動力制御方法 |
| JP2007049825A (ja) * | 2005-08-10 | 2007-02-22 | Hitachi Ltd | 電動車両の走行制御装置および電動走行制御システム |
| JP2009012541A (ja) * | 2007-07-02 | 2009-01-22 | Equos Research Co Ltd | 車両用制御装置 |
| JP2009278840A (ja) * | 2008-05-19 | 2009-11-26 | Nissan Motor Co Ltd | 電動車両の回生制動制御装置 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4962969A (en) * | 1988-09-30 | 1990-10-16 | Ford Motor Company | Adaptive controller for regenerative and friction braking system |
| JP2863234B2 (ja) * | 1989-12-27 | 1999-03-03 | アイシン・エィ・ダブリュ株式会社 | 電動車両 |
| US5365431A (en) * | 1991-04-24 | 1994-11-15 | Aisin Aw Co., Ltd. | Control of electric vehicle motors responsive to detected vehicle speed and required total driving force |
| US5472265A (en) * | 1992-12-10 | 1995-12-05 | Toyota Jidosha Kabushiki Kaisha | Antilock braking control apparatus for electric vehicle |
| US5450324A (en) * | 1993-01-07 | 1995-09-12 | Ford Motor Company | Electric vehicle regenerative antiskid braking and traction control system |
| US5358317A (en) * | 1993-01-07 | 1994-10-25 | Ford Motor Company | Fuzzy logic electric vehicle regenerative antiskid braking and traction control system |
| US5615933A (en) * | 1995-05-31 | 1997-04-01 | General Motors Corporation | Electric vehicle with regenerative and anti-lock braking |
| JP3541621B2 (ja) * | 1997-06-10 | 2004-07-14 | トヨタ自動車株式会社 | 車両用制動装置 |
| JP3442266B2 (ja) * | 1997-09-16 | 2003-09-02 | トヨタ自動車株式会社 | 車両用制動装置 |
| US6325470B1 (en) * | 1997-10-01 | 2001-12-04 | Visteon Global Technologies, Inc. | Method and apparatus for proportioning regenerative braking |
| US6709075B1 (en) * | 2000-08-07 | 2004-03-23 | Ford Global Technologies, Llc | System and method for braking an electric drive vehicle on a low Mu surface |
| US7281770B1 (en) * | 2000-08-08 | 2007-10-16 | Ford Global Technologies, Llc | System and method for regenerative and antiskid braking within an electric vehicle |
| JP4039146B2 (ja) * | 2001-09-27 | 2008-01-30 | 日産自動車株式会社 | 制動制御装置 |
| JP2003205833A (ja) * | 2002-01-11 | 2003-07-22 | Nsk Ltd | 車輪支持用転がり軸受ユニット |
| US7409280B2 (en) | 2004-01-15 | 2008-08-05 | Nissan Motor Co., Ltd. | Vehicle braking control apparatus |
| US7937194B2 (en) * | 2004-09-27 | 2011-05-03 | Oshkosh Corporation | System and method for reducing wheel slip and wheel locking in an electric vehicle |
| KR100819978B1 (ko) * | 2006-08-01 | 2008-04-07 | 현대자동차주식회사 | 하이브리드 및 전기 차량의 브레이크 시스템과 그 제어방법 |
| JP2008154324A (ja) * | 2006-12-15 | 2008-07-03 | Tcm Corp | 産業用電気駆動車両の制動装置 |
| WO2009005073A1 (ja) | 2007-07-02 | 2009-01-08 | Equos Research Co., Ltd. | キャンバ角制御装置 |
| JP5407131B2 (ja) * | 2007-10-02 | 2014-02-05 | 株式会社ジェイテクト | 車両用応力センサシステム |
| JP5374215B2 (ja) | 2008-07-02 | 2013-12-25 | Ntn株式会社 | サイクロイド減速機、インホイールモータ駆動装置、および車両用モータ駆動装置 |
| JP2011229286A (ja) * | 2010-04-20 | 2011-11-10 | Nobuyoshi Muto | 電気自動車およびプログラム |
| JP5562277B2 (ja) * | 2011-03-07 | 2014-07-30 | Ntn株式会社 | 電気自動車 |
-
2011
- 2011-11-22 JP JP2011254570A patent/JP5832868B2/ja not_active Expired - Fee Related
-
2012
- 2012-11-21 CN CN201280056936.5A patent/CN103946053B/zh not_active Expired - Fee Related
- 2012-11-21 EP EP12851360.3A patent/EP2783895A4/en not_active Ceased
- 2012-11-21 US US14/355,735 patent/US9126501B2/en not_active Expired - Fee Related
- 2012-11-21 WO PCT/JP2012/080230 patent/WO2013077376A1/ja active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005225482A (ja) * | 2004-01-15 | 2005-08-25 | Nissan Motor Co Ltd | 車両の制動制御方法及び装置 |
| JP2006034012A (ja) * | 2004-07-16 | 2006-02-02 | Toyota Motor Corp | 車輪のスリップ率演算方法及び車輪の制駆動力制御方法 |
| JP2007049825A (ja) * | 2005-08-10 | 2007-02-22 | Hitachi Ltd | 電動車両の走行制御装置および電動走行制御システム |
| JP2009012541A (ja) * | 2007-07-02 | 2009-01-22 | Equos Research Co Ltd | 車両用制御装置 |
| JP2009278840A (ja) * | 2008-05-19 | 2009-11-26 | Nissan Motor Co Ltd | 電動車両の回生制動制御装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2876014A1 (en) * | 2013-11-22 | 2015-05-27 | ArvinMeritor Technology, LLC | Vehicle brake system and method of control |
| US9193339B2 (en) | 2013-11-22 | 2015-11-24 | Arvinmeritor Technology, Llc | Vehicle brake system and method of control |
| CN110466361A (zh) * | 2019-08-14 | 2019-11-19 | 东风汽车集团有限公司 | 两轮轮毂电机驱动纯电动汽车整车控制器及控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9126501B2 (en) | 2015-09-08 |
| EP2783895A4 (en) | 2015-11-25 |
| EP2783895A1 (en) | 2014-10-01 |
| US20140303824A1 (en) | 2014-10-09 |
| JP5832868B2 (ja) | 2015-12-16 |
| CN103946053B (zh) | 2016-04-20 |
| CN103946053A (zh) | 2014-07-23 |
| JP2013110875A (ja) | 2013-06-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5832868B2 (ja) | 電気自動車 | |
| JP5562277B2 (ja) | 電気自動車 | |
| JP5784930B2 (ja) | 電気自動車 | |
| WO2013077409A1 (ja) | 電動車両制御装置 | |
| EP2679433B1 (en) | Electric automobile | |
| JP5562276B2 (ja) | 電気自動車 | |
| JP5657425B2 (ja) | 電気自動車 | |
| JP5886008B2 (ja) | 電気自動車のモータ制御装置 | |
| JP5851812B2 (ja) | 電動車両制御装置および電動車両 | |
| JP5985724B2 (ja) | 電気自動車 | |
| JP5829497B2 (ja) | 電気自動車のモータ制御装置 | |
| JP5856233B2 (ja) | 電気自動車 | |
| JP2014209843A (ja) | 電気自動車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201280056936.5 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12851360 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14355735 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2012851360 Country of ref document: EP |