WO2013034339A2 - Magnetvorrichtung - Google Patents
Magnetvorrichtung Download PDFInfo
- Publication number
- WO2013034339A2 WO2013034339A2 PCT/EP2012/063713 EP2012063713W WO2013034339A2 WO 2013034339 A2 WO2013034339 A2 WO 2013034339A2 EP 2012063713 W EP2012063713 W EP 2012063713W WO 2013034339 A2 WO2013034339 A2 WO 2013034339A2
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- translator
- stator
- magnetic
- movement
- axis
- Prior art date
Links
Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/06—Electromagnets; Actuators including electromagnets
- H01F7/08—Electromagnets; Actuators including electromagnets with armatures
- H01F7/16—Rectilinearly-movable armatures
- H01F7/1638—Armatures not entering the winding
- H01F7/1646—Armatures or stationary parts of magnetic circuit having permanent magnet
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/06—Electromagnets; Actuators including electromagnets
- H01F7/08—Electromagnets; Actuators including electromagnets with armatures
- H01F7/18—Circuit arrangements for obtaining desired operating characteristics, e.g. for slow operation, for sequential energisation of windings, for high-speed energisation of windings
- H01F7/1844—Monitoring or fail-safe circuits
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K33/00—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system
- H02K33/16—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system with polarised armatures moving in alternate directions by reversal or energisation of a single coil system
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/06—Electromagnets; Actuators including electromagnets
- H01F7/08—Electromagnets; Actuators including electromagnets with armatures
- H01F7/16—Rectilinearly-movable armatures
- H01F2007/1692—Electromagnets or actuators with two coils
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/06—Electromagnets; Actuators including electromagnets
- H01F7/08—Electromagnets; Actuators including electromagnets with armatures
- H01F7/18—Circuit arrangements for obtaining desired operating characteristics, e.g. for slow operation, for sequential energisation of windings, for high-speed energisation of windings
- H01F7/1844—Monitoring or fail-safe circuits
- H01F2007/185—Monitoring or fail-safe circuits with armature position measurement
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2201/00—Specific aspects not provided for in the other groups of this subclass relating to the magnetic circuits
- H02K2201/03—Machines characterised by aspects of the air-gap between rotor and stator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/09—Machines characterised by the presence of elements which are subject to variation, e.g. adjustable bearings, reconfigurable windings, variable pitch ventilators
Definitions
- This invention relates to a magnetic device comprising at least one stator magnet and at least one translator magnet, which translator is movable relative to the stator in a translator movement direction, which translator movement direction is oriented to a stator, further the translator is coupled to a drive axis ,
- the applications of the magnetic device according to the invention are in use as a magnetic drive, as a generator or as a resistance device which generates a force against a force acting from outside on the resistance device force.
- a magnetic drive When used as a magnetic drive mechanical work can be done on the drive axle.
- Magnetic drives according to the prior art are based on the principle of utilization of the magnetic dipole. Activation of repulsive forces and attractive forces causes movement of a translator magnet relative to a stator magnet. This movement may be a linear or rotary movement of the translator magnet directed past the stator or an oscillating movement of the translator magnet directed towards the stator magnet. Magnetic drives according to the prior art, which are based on the latter movement of the translator magnet, are characterized in that the translator magnet are in contact, at least in one end position, with the stator magnet. In prior art magnetic actuators, the translator in its final position and the stator act as a magnet, so that the stator and translator can only be separated by a high energy input.
- JP2006325381 discloses a magnetic device having at least one translator movable between at least two stators, the axis of translation of the translator extending through the stators. The movement of the translator is limited by provided on the stators spacer. The spacers are used to reduce Noise of the power generator and of mechanical noise caused, for example, by the contact of stator and translator.
- JP2006345652 describes a device for controlling a movement of a needle guided by a magnet. There is no indication of any control over the movement of the needle with respect to the state of force caused by a magnet.
- US20060049701 shows a magnetic device wherein the axis of movement of the translators does not extend through the stators. The translators are moved laterally past the stators, with the result that the force state between stators and translator is not oriented parallel to the translator's direction of motion. Notwithstanding the lack of any indication of the translator motion control relative to the translator-stator force state, the device disclosed in US20060049701 has a much lower efficiency than the translator motion because of the orientation of the force state discussed device.
- JP2010104078 describes a magnetic device wherein the translator movement is controlled by a spacer.
- the spacer has a shape that does not affect the resulting between stator and translator force state by its presence.
- RO126256 relates to a magnetic device which does not include a control device for controlling the translator movement as compared with the magnetic device discussed below.
- JP2002335662 discloses a magnetic device which also does not include a control device for controlling the translator movement.
- the object of the invention is to provide a magnetic device, in particular a magnetic drive, a generator or a resistance element, which are characterized by a higher efficiency than the known from the prior art electromagnetic motors.
- the translator magnet will be referred to as translator, the stator magnet as stator.
- the magnetic device comprises a control device, which control device, a device for controlling a distance r> 0 (in words: r greater than zero) of the translator to the stator during operation of the magnetic device with respect to the between Stator and translator resulting force state, the translator is movable in the translator movement direction along a linear translator movement axis relative to the stator, wherein the at least one stator and the translator along the translator movement axis are aligned.
- the distance r is defined in the context of the disclosure of this invention as the distance between the stator-facing surface of the tanzlators and the translator-facing surface of the stator.
- the distance r can be further set by the control device depending on the temporary properties of the magnets. The temporary properties of the magnets can be changed on the one hand by external influences such as heat load, on the other hand by other control devices to be controlled.
- the field strength of a magnetic field and the orientation of the magnet can be controlled by methods of the prior art.
- the choice of materials and the combination of materials have an influence on the properties of a magnet.
- the control device included in the magnetic device of the present invention can control the distance r with respect to the above-mentioned influences and characteristics of the magnets of the at least one stator or the at least one translator.
- the minimum distance r was 1, 0mm to 2.0mm.
- the experimental setup is configurable so that the distance is infinitely adjustable, so that experiments were carried out with any distance in the range of 1, 0 to 2.0mm.
- the axis, along which the translator and the stator are arranged, may have a polygonal shape, one curved in partial regions or one straight in other partial regions.
- stator and translator With only a short-term contact or sufficiently close approach of stator and translator they would act according to common teaching as a magnet, so that - to allow an oscillating movement of the translator - this must be separated by an additional separation energy. It is also an object of the invention disclosed herein to provide a magnetic device, which is characterized in that the stator and translator never come into contact with each other during operation of the magnetic device according to the invention and thus - with reference to the common teaching - at any time of use of the magnetic device as to act a magnet. This allows operation without this additional separation energy as the translator moves in the direction away from the stator.
- the invention does not exclude that the translator and the stator are in contact with each other when the magnetic device according to the invention is not in use.
- the Magnetvornchtung formed as a magnetic drive can be coupled with a to be offset in use of the magnetic drive in motion flywheel, which compensates for a different acceleration of the translator on the Translatorwegrange.
- a flywheel according to the prior art is mentioned here by way of example.
- the magnetic device according to the invention comprises at least one stator and a translator movable relative to the stator.
- An embodiment of the high efficiency magnetic device of the invention comprises two stators and a translator movably mounted between the stators.
- a possible embodiment of the magnetic device according to the invention may be that at least one stator, preferably two stators in, for example, a center of the axis and at least one translator, preferably two translators, are arranged on the axis on both sides of the stator.
- a magnetic device according to the invention may be in combination with a further magnetic device according to the invention and / or in combination with a magnetic device according to the prior art.
- the movement of the translator relative to the stator may be an oscillating motion.
- the oscillating motion of the translator is always relative to a stator.
- the movement of the translator can be achieved by utilizing the attractive force and repulsive force caused by the magnetic dipole acting between the stator and the translator.
- a use of the magnetic device according to the invention as a magnetic drive can be characterized in that the translator is moved in an oscillating manner. Furthermore, the oscillating movement of the translator can be accomplished by a mechanical constraining system. By coupling the translator with a mechanical constraining system such as a crank mechanism, the amplitudes of the oscillating motion of the translator can be limited.
- the mechanical constraining system can compensate for the different or the same magnetic field strengths and their influence on the movement of the translator.
- the invention described below is based on experiments with a pilot plant, which was operated with magnets with different field strengths or with magnets with the same field strengths. It was possible to achieve good experiences in operating the test facility using magnets with the same field strengths.
- the mechanical constraining system may force further movement of the translator in an end position, thereby releasing the translator from the magnetic field of the nearest stator against the attractive forces acting between a stator and the translator and the repulsive forces acting between a stator and the translator.
- a magnetic drive which comprises two stators arranged on an axis and a translator movable between the stators, along the axis.
- the stators and the translator may be formed around this axis as a rotationally symmetrical body.
- the ferromagnetic core Under the magnetic excitation by the field H, the ferromagnetic core is magnetized causing an additional magnetic field M.
- the magnetic fields M and H result in the magnetic field B, with all the magnetic fields in the equation being related.
- Magnetic field, magnetization and magnetic induction can be generally expressed by Equation 1 .1. be expressed.
- volumetric magnetic susceptibility is defined by the following relationship
- B is the magnetic induction in Tesla (T)
- H is the magnetic field in amperes per meter (A m)
- J is the magnetization in Tesla (T)
- M is magnetic dipole moment per unit volume in amperes per meter (A / m)
- ⁇ is the absolute magnetic permeability of the ferromagnetic core
- N is the number of complete windings
- L 2a is the length of the coil in meters (m)
- R is the inner radius of the coil in meters (m)
- V KR 2 L is known to be the volume of the electromagnetic core.
- the magnetic dipoles correspond to the two magnetic charges, which dipoles by a distance L
- the positive magnetic charge is associated with the north polarity, the negative magnetic charge with the south polarity.
- the magnetic dipole moment is oriented from the south pole to the north pole.
- an embodiment of the magnetic drive according to the invention comprising three electromagnets aligned on one axis
- the first and the second electromagnet are mounted immovably and are referred to below as stators.
- the stators are arranged on an axis and spaced apart by a distance d.
- the stators are sufficiently characterized in view of this disclosure by the following parameters. as the number of windings on the coil of the stator,
- the third magnet is movably disposed on an axis defined by the two stators and between the two stators.
- the third magnet is called in the following translator and is sufficiently determined by the following parameters.
- R 'a the radius of the coil of the translator in meters (m)
- the stators are electrically connected to a DC power source
- the magnitude of the magnitude of the magnetic poles are equal in absolute values, but the induction fields obtained are directed in opposite directions.
- the resulting force state is calculated, which adjusts in a polarity of the stators and the translator according to the representations in Figure 1.
- the polarity of the translator shown in Figure 1 is also referred to as a "negative" polarization of the translator, i.e., the magnetic dipole moment is oriented in the direction.
- the resulting force state on the translator is the vectorial sum of all interactions:
- the resulting force state is calculated, which adjusts in a polarity of the stators and the translator as shown in Figure 2.
- the polarity of the translator shown in Figure 2 is also referred to as a "positive" polarization of the translator, i.e., the magnetic dipole moment is oriented in the direction.
- Stator # 1 is poled so that
- Stator # 2 is poled so that applies.
- the size of the magnetic induction field has already been defined by equation (2.1), from which the size of the magnetic induction field between the first stator and the translator can be derived.
- the induction field is oriented in the same direction as the magnetic dipole moment.
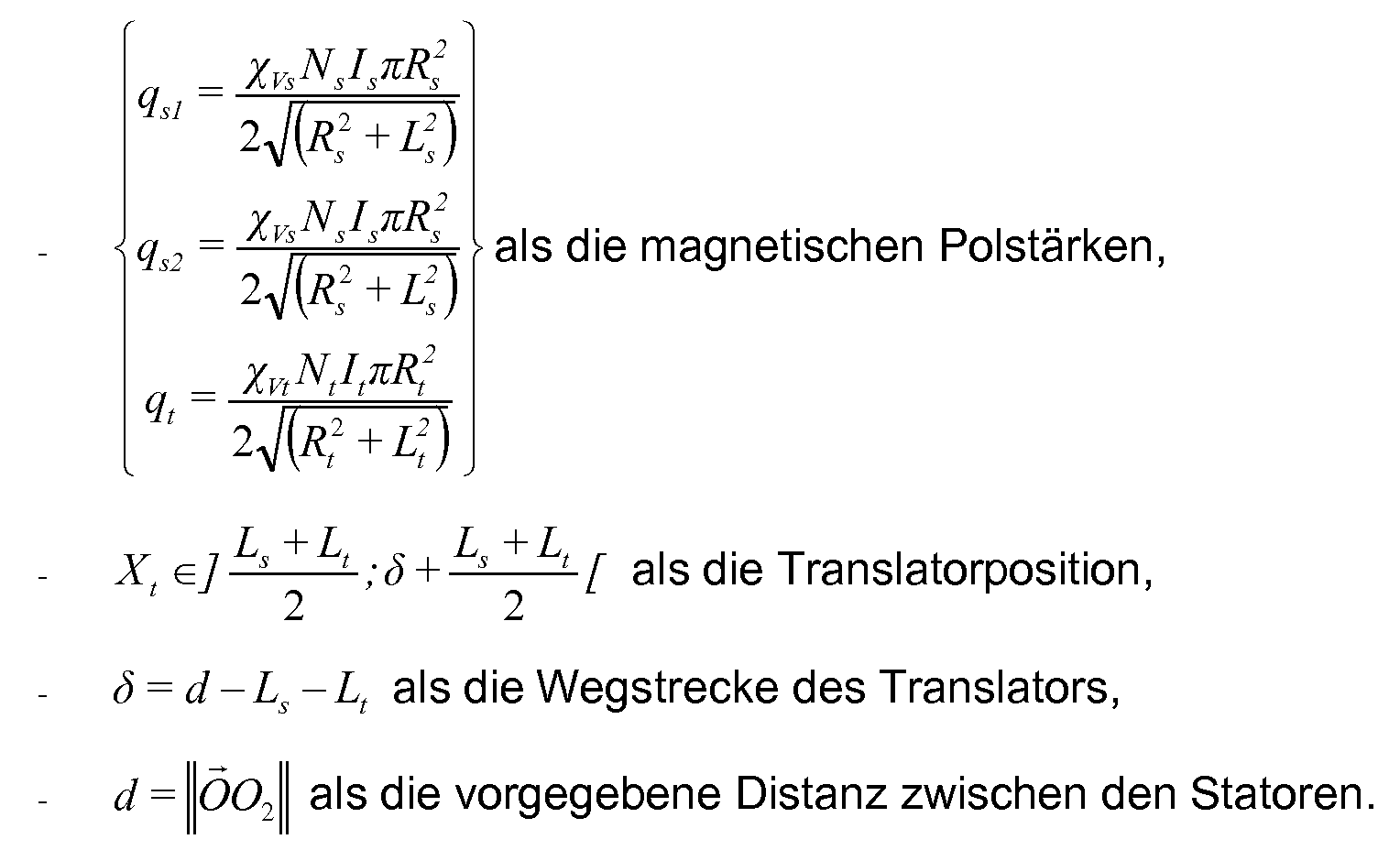
- Magnetic pole strengths are calculated using equations (4.4a) for the first stator, (4.4b) for the second stator, and (4.4c) for the translator.
- the calculation of the magnetic pole strengths involves the calculation of the total magnetic induction field at the poles. This is done using equations (4.2a) and (4.2b).
- Equation (4.5) is a function of the position of the translator between the stators.
- the resultant force state acting on the translator is composed of the repulsive force acting between the first stator and the translator and the attractive force acting between the second stator and the translator.
- the dependence of the respective forces are shown in Figures 3a, 3b, 3c below.
- the above mathematical discussion further shows that in a position of the translator to a stator, the attraction and - after reversal of the stator or the translator - the repulsive force are different.
- the magnetic device according to the invention is based on the fact that the polarity of the stator or translator creates a resultant force state which acts on the translator and causes it to move.
- An embodiment of the magnetic device according to the invention may be that the stator is designed as a permanent magnet, the translator as an electromagnet.
- this embodiment has the disadvantage that a cable connecting the translator with a power supply is subject to movement in at least partial areas because of the mechanical coupling with the translator.
- n 1, 2, 3 stators and n-1 translators arranged between the stators, however, the formation of the translators as electromagnets causes n-1 translators to be reversed to less than n stators.
- a further embodiment of the magnetic device according to the invention may be that the stator as an electromagnet, the translator are formed as a permanent magnet.
- This embodiment of the magnetic device according to the invention when used as a magnetic drive is characterized in that the stator is coupled as a non-movable magnet with a power supply. This has the advantage that the power supply and the stator connecting cables will not move.
- stator can be designed as electromagnets or as permanent magnets stator and translator.
- the formation of the at least one stator and the translator as a permanent magnet relates to the application of the resistance element. In this case, the movement of the stator is limited by activation of repulsive forces between poles of the stator and translator, which are the same polarity.
- a possible embodiment of the magnetic device according to the invention may be that the stator consists of a plurality of stator individual magnets and / or the translator consists of a plurality of translator individual magnets.
- the individual magnets are arranged so that a greater attraction or repulsive force acting between the stators and the translator is provided by a superposition of the individual magnetic fields.
- the control device may comprise a spacer element positioned between the stator and the translator and / or a mechanical constraining system delimiting the movement of the translator.
- the spacer may comprise a switch, by which a change in the polarity of the stator and / or the translator and / or a change in the pole thickness of the stator or the translator is activated.
- the control device may comprise a distance measuring device and / or a timing device, by means of which control device, depending on the position of the translator relative to the stator and / or in dependence on a time period, the polarization of the stator and / or the translator and / or the field strength of the stator and / or the translator is changeable.
- An embodiment of the magnetic device according to the invention comprises at least one control unit which controls the position of the translator relative to the stator.
- This control device is coupled to a position measuring device, which measures the position of the translator optionally in relation to a stator by measuring methods, in particular distance measuring methods and position measuring methods according to the prior art, and optionally in Referring to the position of the translator relative to the stator sets the polarity of the stator or the translator.
- the control device is in no way limited to the measurement of a specific position of the translator or the determination of the reaching of a specific position by the translator.
- the control device may comprise other devices such as position measuring means or speed measuring means for measuring the position of the translator or the speed of the translator at any position of the translator.
- the measurement of position and velocity of the translator at any position may be advantageous in terms of controlling the movement of the translator at a position with a defined distance from the stator, especially at a high speed of the translator, especially as the translator is at a certain position must be braked and accelerated at a defined distance to the stator.
- the determination of the position of the translator is by no means limited to the measurement of a position of the translator relative to the stator. The determination of the position of the translator can be made to any reference point.
- a further embodiment of the magnetic device according to the invention is characterized in that the translator is coupled to a mechanical constraining system such as a crankshaft, by which constraining system the movement of the translator, more specifically the maximum movement amplitudes of the translator while maintaining the spacing of the translator from the stator are controlled ,
- the mechanical constraining system may be coupled to or formed as an element to be driven by the magnetic device of the invention, such as a wheel.
- stator individual magnets on the stator and / or the translator individual magnets on the translator are arranged along a polygon-describing line about a polygon axis oriented parallel to the translator movement direction.
- the translator movement direction and the attractive and repulsive forces activated by the respective magnetic fields are oriented parallel to each other.
- stator individual magnets and / or the translator individual magnets are arranged on the stator or on the translator along a line describing a polygon about an axis oriented parallel to the translator movement direction.
- the respective translator movement direction and the attraction forces and repulsion forces activated by the respective magnetic fields are oriented parallel to one another.
- the translator may be movably supported by at least one guide unit relative to the stator, wherein the guide axis of the guide unit intersects the stator in a region between two immediately adjacent stator individual magnets and the translator in a region between two immediately adjacent translator single magnets.
- a volume extending between the stator and the translator located at the greatest distance d from the stator may be a vacuum.
- the magnetic device according to the invention is arranged in an airtight housing, wherein the drive axle, the power cable et cetera are guided through this housing.
- Figure 1 and Figure 2 show an embodiment of the magnetic device according to the invention as a magnetic drive 20 together with the variables used in the description.
- Figures 3a-3c show diagrams relating to the magnitude of the forces acting on the translator as a function of the distance of the position of the transformer to the stators.
- Figure 4 and Figure 5 show a further embodiment of the magnetic device according to the invention as a magnetic drive.
- FIG. 6 shows a further embodiment, similar to the embodiment shown in FIGS. 1 and 2, of the magnetic device according to the invention as a magnetic drive.
- FIG. 7 shows a further embodiment of the magnetic device according to the invention.
- FIG. 8 illustrates a possible coupling of a plurality of magnetic drives with a shaft to be driven.
- Figure 9 to Figure 1 1 show a further embodiment of the magnetic device according to the invention as a magnetic drive.
- FIG. 12 shows a further embodiment of the magnetic device according to the invention as a resistance element.
- FIG. 13 shows an isometric view of an embodiment of the magnetic device according to the invention.
- FIG. 14 is a top view similar to a view of the embodiment of the magnetic device according to the invention shown in FIG.
- FIG. 15 shows a side sectional view of that shown in FIG. 13 to FIG.
- Embodiment of the magnetic device according to the invention Embodiment of the magnetic device according to the invention.
- FIG. 16 shows the arrangement of the elements in the context of an FEM simulation of the magnetic device shown in FIGS. 13 to 15.
- Figure 17 to Figure 18 shows the result of the FEM simulation.
- Figure 19 and Figure 20 are diagrams of the FEM simulation.
- FIG 1 and Figure 2 show an embodiment of the magnetic device according to the invention as a magnetic drive 20 together with the variables used in the description.
- the magnetic drive 20 comprises a translator 2 and stators 1, 1 'arranged laterally to the translator 2.
- the stators 1, 1 'and the translator 2 are electromagnets, which along an axis - in the exemplary embodiment shown in Figure 1 and Figure 2 along the drive axis of the translator 3 - are aligned.
- the dipolar moment of the stators 1, 1 'and the translator 2 is aligned parallel to this axis.
- the translator 2 For alternating polarity of the translator 2 this is connected via a power cable 1 1 with an AC power source, not shown, while the stators 1, 1 'are each connected to other power cables 1 1 with a DC power source, not shown.
- the polarity of the translator 2 is set so that the polarity of the translator 2 facing the left stator 1 has a same polarity to the nearer pole of the left stator 1, whereby a repulsive force 13 between the left stator 1 and the translator 2 is activated; the pole of the translator 2 facing the right-hand stator V has a different polarity to the nearer pole of the right-hand stator V, whereby an attractive force 12 between the left-hand stator 1 and the translator 2 is activated.
- the force of attraction 12 and repulsive force 13 act on the translator 2 and cause, as a resultant force state, a movement of the translator 2 in the translator movement direction 6 shown in FIG. 1 from left to right, the translator movement direction 6 being oriented towards the stator 1.
- the movement of the translator 2 following the polarity reversal of the translator 2 in translator movement direction 6 from right to left is shown in FIG.
- the translator 2 When operating the magnetic drive 20, the translator 2 always has a defined distance r greater than zero to the stator 1.
- This feature is a contact of the translator 2 with a stator 1, 1 'excluded during operation of the magnetic drive 20 according to the invention.
- the distance r is defined as the distance between the mutually facing pole ends of the translator 2 and the respective stator 1, 1 '.
- the position 16 is an end position of the linear movement of the translator 2 and is characterized in that the translator 2 to the left stator 1 on the one hand smallest defined distance r 2 , on the other hand to the right stator V has the largest defined distance n.
- the distances n and r 2 are defined so that, after reversal of the translator 2 to perform a subsequent translator shown in Figure 2 from right to left acting on the translator 2, by the same polarity of the immediately adjacent poles of Translator 2 and left Stator 1 resulting repulsive force is maximum.
- the distance r is predetermined by a control unit, by means of which control unit the polarity of the translator 2 designed as an electromagnet is changed. When the position 16 is reached by the translator 2, the translator 2 'is reversed in polarity, so that the translator 2 is moved in an opposite direction of movement to that shown in FIG.
- the stator 1 is held by a stator support 14 on a support structure 15.
- the translator 2 is coupled to a drive axle 3 which, in the embodiment shown in FIG. 1, also serves as a guide unit 7 of the translator.
- the guide axis 8 of the guide unit 7 is oriented parallel to the translator movement direction 6.
- the guide unit 8 passes through the stators 1, V and through the translator 2, wherein the respective magnetic field of the stators 1, 1 'and the translator 2 is disturbed by the presence of the guide unit 8 in the respective magnetic fields.
- the volume which extends between the stators 1, 1 ' is a vacuum.
- the magnetic drive 20 is for this purpose located in a housing, not shown.
- the graph disclosed in FIG. 3 a shows the dependence of the repulsive force 13 between the translator 2 and the left stator 1 during a movement of the translator 2 according to FIG. 1.
- the spacing of the translator 2 from the respective stator 1, 1 ', the force acting between the translator 2 and the stator 1, 1' is plotted on the ordinate.
- the graphs disclosed in FIGS. 3a, 3b and 3c are based on a calculation according to the equations disclosed in the description text with the following assumptions:
- the position 16 of the translator 2 is set by the control unit so that the zero point of the translator 2 has a distance £ m in to the zero point of the immediately adjacent stator 1, 1 '.
- the graph shown in FIG. 3b relates to the dependence of the attractive force 13 on the spacing of the translator 2 from the right-hand stator V as shown in FIG. 1. It is generally the case that the attraction 13 increases with increasing approach of the translator 2 to the right stator 1 '.
- FIG. 3c shows the graph resulting from the graphs of FIGS. 3a and 3b.
- the graph disclosed in FIG. 3c thus shows the resultant force state resulting from the progression of the repulsive force 13 and the attraction 12 as a function of the position of the translator 2 between the stators 1, 1 ', the resulting force state being parallel to the axis, in FIG Referring to Figure 1 and Figure 2 is considered parallel to the movement axis 3.
- FIG. 4 and FIG. 5 show another embodiment of the magnetic device according to the invention as magnetic drive 20, which is similar to that in FIG. 1 and FIG. 2.
- the polarity of the translator 2 remains in the further embodiment shown in FIG during a movement of the translator 2 equal, while the polarity of the stators 1, 1 'is changed.
- FIG. 6 shows an embodiment similar to the embodiment shown in FIG. 4, which, in contrast to the embodiment shown in FIG. 4, comprises two guide units.
- the magnetic field acting between the stators 1, 1 'and the translator 2 is not disturbed by the presence of the guide unit 7.
- FIG 7 shows a further embodiment of the magnetic drive 20 according to the invention, wherein the translator 2 is rotatably moved.
- the magnetic drive 20 comprises four segment-shaped translator individual magnets 5, which are arranged in the form of a circle 10 about a drive axis 3 and a translator axis of rotation and at right angles thereto.
- the translator individual magnets 5 are mechanically coupled to the drive shaft 3 via guide units, so that the translator individual magnets 5 form a translator 2.
- segmentally shaped stator individual magnets 4 are arranged, which are coupled by a mechanical coupling, not shown, to a stator 1.
- the mutually facing poles of the stator individual magnets 4 and the translator individual magnets 5 are poled differently or the same.
- FIG. 8 shows the coupling of a first magnetic drive 20 according to the invention with a second magnetic drive 20 'according to the invention.
- a rod 19th provided, which at one end with the disc 17 eccentrically with respect to the disc center point 18, at its other end to the respective magnetic drive 20,20 'is pivotally connected.
- the magnetic drives 20,20 ' are mounted stationary with respect to the disk center point 18, so that a rotational movement of the disk 17 is caused by the linear movement generated by the magnetic drives 20,20'. Due to the eccentric mounting of the rod 19,19 ', the linear movement of the translator 2 (not shown in Figure 8) of the magnetic drive 20,20' is mechanically controlled.
- Figure 9 to Figure 1 1 show views of an embodiment of a magnetic drive, which is characterized by the arrangement of a plurality of stator individual magnets 4 on the stators 1, 1 'and a plurality of translator individual magnets 5 on the translator 2, as well as detailed views of the translator 2 and the stator 1, 1 '.
- FIG. 9 shows a top view of the embodiment of the magnetic drive according to the invention shown in FIGS. 9 to 11.
- the magnetic drive comprises 2 stators 1, 1 ', which are arranged along an axis 9. There are further arranged two guide units 7, through which the located between the stators 1, 1 'Translator 2 is mounted relative to the stators 1, 1' movable.
- the translator 2 is further coupled to a drive axle 3, which extends through the stators 1, 1 'to a driven element (not shown).
- the support structure 15 serves as a support for the axle 9 and the drive axle. 3
- FIG. 10 shows a side view of the stator 1 of the embodiment of the magnetic drive according to the invention shown in FIG. 9 to FIG.
- the stator 1 comprises five stator individual magnets 4, which are arranged rotationally symmetrically about the drive axis 3.
- the stator individual magnets 4 are each arranged opposite the translator individual magnets 5.
- FIG. 11 shows a side view of the translator 2.
- the translator 2 comprises a plurality of translator individual magnets 5, which are arranged rotationally symmetrically about the drive axis 3 extending normal to the viewing plane along a polygon 10.
- the translator individual magnets 5 are on the one hand on the drive axle 3, on the other hand mounted on a translator carrier 21 by a translator bearing 22.
- the translator bearings 22 are formed with the smallest possible cross-section webs.
- FIG. 12 shows a further embodiment of the magnetic drive according to the invention as a resistance element.
- the structure is basically similar to the embodiments described above, but with the stators 1, 1 'poled with respect to the translator 2 so that attractive forces 12 and repulsive forces 13 between the poles of the translator 2 and the stators 1, 1' are activated.
- the translator 2 is thus movable during acceleration by an external force acting on the translator 2 via the drive axis 3 between the stators 1, 1 'along a path.
- FIG. 13 shows an isometric view of a further embodiment of the magnetic device according to the invention.
- the magnet device comprises a stator 1 arranged between two translators 2, wherein the stator 1 and the translator 2 are arranged within a support structure 15 formed into a housing. Outside the support structure, the drive axle 3 is arranged.
- the stator 1 and the translators 2 are arranged along the axis 9, through which axis 9 the translator movement direction 6 is predetermined.
- the translators 2 are mounted by means of two guide units 7 and are supported by these guide units 7, wherein the guide axes 8 are oriented parallel to the translator movement direction 6.
- the guide units 8 are arranged laterally of the translators 2, so that the guide units 8 do not disturb the magnetic field acting between the translators 2 and the stator 1.
- the guide units 8 are held by the support structure 15.
- the magnetic device shown in Fig. 13 has substantially the above-mentioned characteristics as far as they are applicable to the device shown in Fig. 13.
- the translators 2 are N45 grade magnets.
- the stator 1 is a Electromagnet comprising a magnetic core 22 and a coil 22 surrounding the core 22.
- FIG. 14 shows a top view of a bottom view of the magnetic device according to the invention shown in FIG. The features described above with reference to FIG. 13 are substantially visible in FIG.
- the stator 1 is mounted on the support structure 15 by means of a stator carrier 14.
- the core 22 of the stator 1 extends beyond the support structure 15 in the direction of the axis 9, so that the magnetic field acting between the stator 1 and the translators 2 is not disturbed by the stator support 14.
- the shape of the translator carrier 24, by means of which the translators 2 are mounted on the guide unit 7, is adapted to the torque load recognizable by the person skilled in the art and to the oscillatory forces caused by, inter alia, the oscillating motion of the translators 2.
- FIG. 15 shows a sectional view of the magnetic device shown in FIGS. 13 and 14.
- a calculation area 21 is entered for which the course of the magenta field strengths was calculated by means of the finite element method (FEM for short).
- FEM finite element method
- the calculation area 21 extends only over one half of symmetry; the axis of symmetry is congruent with the axis 9 in FIG.
- the results of the calculation by FEM are discussed in the following paragraphs.
- Figure 16 shows a detail of the symmetry half observed in the calculations by FEM.
- the symmetry axis and the axis 9 are again congruent.
- the symmetry halves of the translators 2 in FIG. 16 are entered.
- the stator 1 comprises a core 22 and a coil 23, wherein again only the respective symmetry halves are registered.
- FIG. 17 and FIG. 18 show the result of the simulation by means of FEM.
- the FEM calculation is based on the assumption that the stator is designed as a 90-amp solenoid and the translators 2 as N45-grade permanent magnets at 1050kA / m.
- the repulsive force 13 acting between the stator 1 and the translator 2 constitutes the major part of the translational force acting on the translator 2
- a movement of the translator 2 ' is also effected by the force of attraction 12 acting between the translator 2' and the stator 1.
- FIG. 18 shows the result of the simulation by means of FEM at a position of the translators 2 in a respectively equal distance from the stator 1.
- FIG. 19 shows a diagram in which the translational force calculated by means of FEM simulation is compared with the translational force measured at the test facility.
- a translator with a permanent magnetization of 1050.0 kA / m was considered.
- the stator was charged with 90A to perform the measurement on the pilot plant.
- the charging of the stator with 9A was taken into account and the values obtained were extrapolated to 90A.
- FIG. 20 compares the translational force calculated by means of FEM simulation on the basis of the above theory with different magnetization of the translators designed as permanent magnets.
- the diagram is the calculated translational force on the y-axis, the position of the tanslator plotted on the x-axis.
- the influence of the magnetization of the translators formed as permanent magnets when the stator is acted upon by 9A but extrapolated to the application of 90A can be seen from the diagram of FIG.
- the graph "simulated force [N]" in the graph represents the general graph of the other graphs of the graph, and the graph "simulated force” is also plotted in the graph of Figure 19 as "simulated force [N]".
Landscapes
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Linear Motors (AREA)
- Reciprocating, Oscillating Or Vibrating Motors (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Abstract
Description



























Claims


Priority Applications (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP12756120.7A EP2754159B1 (de) | 2011-09-05 | 2012-07-12 | Magnetvorrichtung |
| BR112014005056-2A BR112014005056B1 (pt) | 2011-09-05 | 2012-07-12 | dispositivo magnético |
| CN201280054289.4A CN103946932B (zh) | 2011-09-05 | 2012-07-12 | 磁性装置 |
| KR1020147009188A KR101898102B1 (ko) | 2011-09-05 | 2012-07-12 | 자성 디바이스 |
| MX2014002607A MX2014002607A (es) | 2011-09-05 | 2012-07-12 | Dispositivo magnetico. |
| JP2014527545A JP6213782B2 (ja) | 2011-09-05 | 2012-07-12 | 磁気装置 |
| EA201490572A EA034418B1 (ru) | 2011-09-05 | 2012-07-12 | Магнитный привод |
| IL231315A IL231315A0 (en) | 2011-09-05 | 2014-03-05 | magnet device |
| ZA2014/02175A ZA201402175B (en) | 2011-09-05 | 2014-03-25 | Magnet device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ATA1260/2011A AT510941B1 (de) | 2011-09-05 | 2011-09-05 | Magnetvorrichtung |
| ATA1260/2011 | 2011-09-05 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| WO2013034339A2 true WO2013034339A2 (de) | 2013-03-14 |
| WO2013034339A3 WO2013034339A3 (de) | 2013-09-06 |
Family
ID=46750036
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/EP2012/063713 WO2013034339A2 (de) | 2011-09-05 | 2012-07-12 | Magnetvorrichtung |
Country Status (14)
| Country | Link |
|---|---|
| US (1) | US8952578B2 (de) |
| EP (1) | EP2754159B1 (de) |
| JP (1) | JP6213782B2 (de) |
| KR (1) | KR101898102B1 (de) |
| CN (1) | CN103946932B (de) |
| AR (1) | AR087783A1 (de) |
| AT (1) | AT510941B1 (de) |
| BR (1) | BR112014005056B1 (de) |
| EA (1) | EA034418B1 (de) |
| IL (1) | IL231315A0 (de) |
| MX (1) | MX2014002607A (de) |
| TW (1) | TWI578666B (de) |
| WO (1) | WO2013034339A2 (de) |
| ZA (1) | ZA201402175B (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016046084A1 (de) | 2014-09-23 | 2016-03-31 | Seh Limited | Magnetvorrichtung umfassend statoren und translatoren |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015047938A1 (en) * | 2013-09-26 | 2015-04-02 | Means Industries, Inc. | Electromagnetic system for overrunning coupling assembly |
| EP2998801A1 (de) * | 2014-09-19 | 2016-03-23 | The Swatch Group Research and Development Ltd. | Magnetische Ankerhemmung, und Gangeinstellvorrichtung eines Uhrwerks |
| DE102014214439A1 (de) * | 2014-07-23 | 2016-01-28 | Micro-Epsilon Messtechnik Gmbh & Co. Kg | Aktor-Sensor-Anordnung und Verfahren zur Anwendung bei einer solchen Anordnung |
| FR3064764B1 (fr) * | 2017-03-28 | 2019-06-28 | Hutchinson | Generateur d'efforts dynamiques comprenant au moins deux balourds et actionneur comprenant de tels generateurs |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002335662A (ja) | 2001-05-10 | 2002-11-22 | Act Giken:Kk | 三安定自己保持電磁石 |
| US20060049701A1 (en) | 2004-09-07 | 2006-03-09 | Nippon Pulse Motor Co., Ltd. | Linear actuator |
| JP2006325381A (ja) | 2005-05-18 | 2006-11-30 | Mutsuo Hirano | 往復リニアエンジン |
| JP2006345652A (ja) | 2005-06-09 | 2006-12-21 | Shinko Electric Co Ltd | リニアアクチュエータの位置決め制御方法及び装置 |
| JP2010104078A (ja) | 2008-10-21 | 2010-05-06 | Jtekt Corp | リニアアクチュエータ |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3238397A (en) * | 1963-01-21 | 1966-03-01 | Norman B Maness | Electrical reciprocation apparatus |
| GB1392010A (en) * | 1972-08-18 | 1975-04-23 | Bell Punch Co Ltd | Printing machines |
| JPS5633620A (en) * | 1979-08-28 | 1981-04-04 | Canon Inc | Light scanner |
| JPS5731367A (en) * | 1980-08-01 | 1982-02-19 | Sumitomo Heavy Ind Ltd | Linear motion vs. electric energy converter |
| JPS5913084U (ja) * | 1982-07-16 | 1984-01-26 | ミサワホ−ム株式会社 | 電磁往復運動装置 |
| US5166563A (en) * | 1990-03-02 | 1992-11-24 | Stuart Bassine | Magnetically actuated linear displacement compressor |
| US5203172A (en) * | 1990-05-17 | 1993-04-20 | Simpson Alvin B | Electromagnetically powered hydraulic engine |
| JPH04117157A (ja) * | 1990-05-25 | 1992-04-17 | Sony Corp | カメラレンズ駆動装置 |
| US5175455A (en) * | 1990-10-31 | 1992-12-29 | Otis Elevator Company | Permanent magnet linear door motor |
| EP0580117A3 (en) * | 1992-07-20 | 1994-08-24 | Tdk Corp | Moving magnet-type actuator |
| JP3371041B2 (ja) * | 1994-11-02 | 2003-01-27 | 住友特殊金属株式会社 | 磁石可動形リニアアクチュエータ |
| JP3341696B2 (ja) * | 1998-02-16 | 2002-11-05 | 株式会社村田製作所 | リニアアクチュエータ |
| US6657847B1 (en) * | 1999-07-13 | 2003-12-02 | Siemens Automotive Corporation | Method of using inductance for determining the position of an armature in an electromagnetic solenoid |
| DE10003928A1 (de) * | 1999-11-25 | 2001-06-07 | Daimler Chrysler Ag | Elektromagnetischer Aktuator |
| JP3791402B2 (ja) * | 2001-01-26 | 2006-06-28 | 松下電工株式会社 | リニア振動モータの駆動制御方法及び駆動制御装置 |
| DE10207828B4 (de) * | 2002-02-25 | 2004-10-07 | Technische Universität Dresden | Elektromagnetischer Hubmagnet |
| JP2003339188A (ja) * | 2002-05-21 | 2003-11-28 | Matsushita Electric Ind Co Ltd | リニアモータの駆動装置 |
| JP2005245047A (ja) * | 2004-02-24 | 2005-09-08 | Nippon Pulse Motor Co Ltd | リニアアクチュエータ |
| JP2006121856A (ja) * | 2004-10-25 | 2006-05-11 | Mitsubishi Electric Corp | 電磁式アクチュエータ |
| US7898121B2 (en) * | 2005-09-21 | 2011-03-01 | Ricardo Uk Ltd | Linear actuator |
| FR2894377B1 (fr) * | 2005-12-02 | 2008-05-16 | Valeo Sys Controle Moteur Sas | Actionneur electromagnetique avec deux electroaimants comportant des aimants de forces differentes, et procede de gestion d'une soupape de moteur a combustion interne faisant application. |
| JP2008206356A (ja) * | 2007-02-22 | 2008-09-04 | Jtekt Corp | 可動磁石型リニアアクチュエータ |
| JP2009022087A (ja) * | 2007-07-11 | 2009-01-29 | Sharp Corp | リニアモータおよびこれを備えたスターリング冷凍機 |
| JP2010019934A (ja) * | 2008-07-08 | 2010-01-28 | Seiko Epson Corp | アクチュエータ、光スキャナおよび画像形成装置 |
| US7705493B2 (en) * | 2008-08-01 | 2010-04-27 | Van Os Ron | Magnetic mirror air bearing for Michelson interferometer with lateral motion |
| JP5396400B2 (ja) * | 2008-11-17 | 2014-01-22 | コマツ産機株式会社 | リニアアクチュエータ |
| RO126256A2 (ro) * | 2009-06-30 | 2011-04-29 | Ciprian Astratini-Enache | Actuator miniaturizat de cursă scurtă cu magneţi permanenţi |
| JP2011062032A (ja) * | 2009-09-14 | 2011-03-24 | Honda Motor Co Ltd | リニアサーボアクチュエータ機構 |
| DE202009014192U1 (de) * | 2009-10-20 | 2011-03-03 | Eto Magnetic Gmbh | Monostabile elektromagnetische Aktuatorvorrichtung |
| JP3158466U (ja) * | 2010-01-18 | 2010-04-02 | 登冠科技股▲ふん▼有限公司 | 超小型発電装置 |
-
2011
- 2011-09-05 AT ATA1260/2011A patent/AT510941B1/de not_active IP Right Cessation
-
2012
- 2012-07-12 EP EP12756120.7A patent/EP2754159B1/de active Active
- 2012-07-12 MX MX2014002607A patent/MX2014002607A/es active IP Right Grant
- 2012-07-12 BR BR112014005056-2A patent/BR112014005056B1/pt active IP Right Grant
- 2012-07-12 CN CN201280054289.4A patent/CN103946932B/zh active Active
- 2012-07-12 WO PCT/EP2012/063713 patent/WO2013034339A2/de active Application Filing
- 2012-07-12 JP JP2014527545A patent/JP6213782B2/ja active Active
- 2012-07-12 KR KR1020147009188A patent/KR101898102B1/ko active IP Right Grant
- 2012-07-12 EA EA201490572A patent/EA034418B1/ru not_active IP Right Cessation
- 2012-08-31 US US13/600,709 patent/US8952578B2/en active Active
- 2012-09-04 TW TW101132166A patent/TWI578666B/zh active
- 2012-09-05 AR ARP120103271A patent/AR087783A1/es unknown
-
2014
- 2014-03-05 IL IL231315A patent/IL231315A0/en active IP Right Grant
- 2014-03-25 ZA ZA2014/02175A patent/ZA201402175B/en unknown
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002335662A (ja) | 2001-05-10 | 2002-11-22 | Act Giken:Kk | 三安定自己保持電磁石 |
| US20060049701A1 (en) | 2004-09-07 | 2006-03-09 | Nippon Pulse Motor Co., Ltd. | Linear actuator |
| JP2006325381A (ja) | 2005-05-18 | 2006-11-30 | Mutsuo Hirano | 往復リニアエンジン |
| JP2006345652A (ja) | 2005-06-09 | 2006-12-21 | Shinko Electric Co Ltd | リニアアクチュエータの位置決め制御方法及び装置 |
| JP2010104078A (ja) | 2008-10-21 | 2010-05-06 | Jtekt Corp | リニアアクチュエータ |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016046084A1 (de) | 2014-09-23 | 2016-03-31 | Seh Limited | Magnetvorrichtung umfassend statoren und translatoren |
Also Published As
| Publication number | Publication date |
|---|---|
| AT510941A4 (de) | 2012-07-15 |
| AR087783A1 (es) | 2014-04-16 |
| US8952578B2 (en) | 2015-02-10 |
| JP6213782B2 (ja) | 2017-10-18 |
| US20130057086A1 (en) | 2013-03-07 |
| IL231315A0 (en) | 2014-04-30 |
| EA034418B1 (ru) | 2020-02-05 |
| EP2754159A2 (de) | 2014-07-16 |
| MX2014002607A (es) | 2014-07-24 |
| TWI578666B (zh) | 2017-04-11 |
| CN103946932B (zh) | 2016-10-12 |
| CN103946932A (zh) | 2014-07-23 |
| JP2014528230A (ja) | 2014-10-23 |
| KR101898102B1 (ko) | 2018-09-12 |
| EP2754159B1 (de) | 2019-01-02 |
| WO2013034339A3 (de) | 2013-09-06 |
| TW201325036A (zh) | 2013-06-16 |
| ZA201402175B (en) | 2016-01-27 |
| KR20140072086A (ko) | 2014-06-12 |
| AT510941B1 (de) | 2012-07-15 |
| EA201490572A1 (ru) | 2014-08-29 |
| BR112014005056B1 (pt) | 2020-11-03 |
| BR112014005056A2 (pt) | 2017-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2754159A2 (de) | Magnetvorrichtung | |
| DE102007063276A1 (de) | Oszillierendes Stromerzeugungsmodul | |
| DE102006055457B4 (de) | Schwingungserzeuger für seismische Anwendungen | |
| DE112005003694T5 (de) | Magnetmotor | |
| DE4421594A1 (de) | Vorrichtung zur Veränderung der magnetischen Luftspaltinduktion in elektromechanischen Energiewandlern, bei denen der magnetische Widerstand des magnetischen Schließungskreises in der Maschine variabel ist | |
| EP2754231A2 (de) | Magnetvorrichtung mit polygonaler bewegung des translators | |
| DE102016113188A1 (de) | Bremssystem und Verfahren zum Betreiben eines Bremssystems | |
| EP3382868A1 (de) | Elektromotor | |
| DE10247228B4 (de) | Verfahren und Vorrichtung zum Magnetisieren eines dauermagnetischen Ringmagneten mit gerader Polzahl | |
| DE1447327A1 (de) | Schwingungsvorrichtung | |
| DE102017008513B4 (de) | Vorrichtung und Verfahren zum Zerkleinern, Desagglomerieren, Dispergieren und Mischen von dispersen Stoffen und pumpfähigen Mehrphasengemischen | |
| EP2991205A1 (de) | Rotor-Stator-Anordnung und Induktionsgenerator | |
| AT515114B1 (de) | Magnetvorrichtung umfassend Statoren und Translatoren | |
| DE2409298A1 (de) | Elektrische kolbenanordnung | |
| DE3729298A1 (de) | Vorrichtung zur energieumwandlung | |
| DE102017108037A1 (de) | Energieerzeugungsvorrichtung | |
| DE4107784A1 (de) | Magnetenabschirmung sprungmaschine | |
| WO2006066425A1 (de) | Verfahren und vorrichtung zur energieumwandlung | |
| DE19705565A1 (de) | Magnetenabschirmung Maschine | |
| DE20512C (de) | Elektrischer Motor | |
| DE102013107742A1 (de) | Generator | |
| EP3417533A1 (de) | Magnetmotor | |
| AT144268B (de) | Elektromagnetischer Schwingankermotor. | |
| EP2492646A2 (de) | Energieautarke Einrichtung und Verfahren zur Positionsdetektion | |
| DE3002382A1 (de) | Elektromotor bzw. -generator mit im staender angeordneter luftspulen-erregerwicklung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2014527545 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 231315 Country of ref document: IL Ref document number: MX/A/2014/002607 Country of ref document: MX |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 201490572 Country of ref document: EA |
|
| ENP | Entry into the national phase |
Ref document number: 20147009188 Country of ref document: KR Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12756120 Country of ref document: EP Kind code of ref document: A2 |
|
| REG | Reference to national code |
Ref country code: BR Ref legal event code: B01A Ref document number: 112014005056 Country of ref document: BR |
|
| ENP | Entry into the national phase |
Ref document number: 112014005056 Country of ref document: BR Kind code of ref document: A2 Effective date: 20140305 |