WO2012164708A1 - 航空機の傾き検出装置およびこれを用いた貨物の積み降ろし方法 - Google Patents
航空機の傾き検出装置およびこれを用いた貨物の積み降ろし方法 Download PDFInfo
- Publication number
- WO2012164708A1 WO2012164708A1 PCT/JP2011/062637 JP2011062637W WO2012164708A1 WO 2012164708 A1 WO2012164708 A1 WO 2012164708A1 JP 2011062637 W JP2011062637 W JP 2011062637W WO 2012164708 A1 WO2012164708 A1 WO 2012164708A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- aircraft
- inclination
- cargo
- alarm
- loading
- Prior art date
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 55
- 238000000034 method Methods 0.000 title claims description 14
- 230000005484 gravity Effects 0.000 claims abstract description 62
- 238000013459 approach Methods 0.000 claims abstract description 10
- 238000002955 isolation Methods 0.000 claims description 3
- 210000001364 upper extremity Anatomy 0.000 description 24
- 210000001217 buttock Anatomy 0.000 description 9
- 230000007935 neutral effect Effects 0.000 description 9
- 239000000758 substrate Substances 0.000 description 9
- 239000000446 fuel Substances 0.000 description 5
- 210000002414 leg Anatomy 0.000 description 4
- 238000009434 installation Methods 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 235000012054 meals Nutrition 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000010865 sewage Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D45/00—Aircraft indicators or protectors not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D9/00—Equipment for handling freight; Equipment for facilitating passenger embarkation or the like
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/02—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for weighing wheeled or rolling bodies, e.g. vehicles
- G01G19/07—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for weighing wheeled or rolling bodies, e.g. vehicles for weighing aircraft
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M1/00—Testing static or dynamic balance of machines or structures
- G01M1/12—Static balancing; Determining position of centre of gravity
- G01M1/122—Determining position of centre of gravity
- G01M1/125—Determining position of centre of gravity of aircraft
Definitions
- the present invention relates to an aircraft tilt detection device and an aircraft tilt detection device that enable an operator to grasp the tilting state of an aircraft when loading and unloading cargo on an aircraft, and to prevent an aircraft tail accident and a front leg damage accident.
- the present invention relates to a method for loading and unloading cargo.
- An aircraft landing gear consists of three points, one or more main legs set slightly behind the longitudinal center of the fuselage, and front legs provided near the front end of the fuselage.
- the main leg supports about 90% of the weight, and the front leg supports the remaining 10%. Since the cargo compartment is provided at the front and rear of the main landing gear, if the amount mounted on the rear cargo compartment becomes excessive, a so-called buttock accident occurs in which the front leg floats and the rear of the fuselage comes into contact with the ground.
- the front legs configured to be as light as possible, which have only enough strength to carry about 10% of the aircraft weight as described above, will break. This will lead to a so-called front leg damage accident. In either case, the rear-end accident or the front leg breakage will cause a great hindrance to the subsequent operation and enormous costs for repairing the aircraft, so it must be avoided.
- Tethering means that the rope is loosely stretched from the ground so that it is hooked on the front leg, and this tension is monitored by a dedicated observer, and when the front part of the fuselage is lifted and the rope is tensioned, the observer removes the cargo. It is a method to warn the worker who performs.
- Tail stanchions are heavy and cannot be carried on board.
- tethering can be done at any airport with simple equipment, but it is necessary to arrange a dedicated observer to monitor the tension of the rope, and it is neglected at airports where there are not enough personnel There is a possibility.
- tail stanchions and the execution of tethering can avoid the situation where the center of gravity of the aircraft moves backwards and causes a buttock accident, but conversely, the center of gravity of the aircraft moves forward and damages the front legs. This situation is difficult to avoid.
- the present invention has been made in view of such circumstances, and enables an operator who loads and unloads a cargo on an aircraft to grasp the inclination state of the aircraft, and prevents an aircraft tail accident and a front leg damage accident.
- An object of the present invention is to provide an aircraft inclination detection device capable of smoothly carrying on and off cargo loading and a cargo loading and unloading method using the same.
- An aircraft inclination detection device for solving the above-described problem includes an inclination angle detection means for detecting an inclination angle in the pitch direction when the aircraft is parked, an alarm means, and the inclination angle detection means. Control means for causing the alarm issuing means to issue an alarm when the detected inclination angle approaches an allowable limit inclination angle in the forward and backward tilt directions of the aircraft.
- the tilt angle in the pitch direction of the fuselage should be the limit tilt angle of the aircraft. Even when the vehicle approaches, the warning is issued from the warning issuing means, so that the loading / unloading work can be temporarily stopped to check the current state of the aircraft posture. For this reason, it is possible to prevent an accident with a buttock on the aircraft or a front leg damage accident.
- the control means provides the center-of-gravity management information unique to the aircraft before the cargo loading / unloading operation on the aircraft.
- the movable range in the forward tilt direction and the backward tilt direction until the limit tilt angle is reached is corrected based on the input gravity center management information.
- the control means can move in the forward and backward tilt directions until the control means reaches a new limit tilt angle based on this information. Correct the range.
- the tilt information of the aircraft may be input to the control means by operating a numeric keypad or the like, or may be input from other information devices to the control means by a storage medium such as a USB (Universal Serial Bus) memory.
- a storage medium such as a USB (Universal Serial Bus) memory.
- the aircraft tilt detection apparatus is characterized in that, in the first aspect of the present invention, the aircraft inclination detection apparatus can be installed at any place of the aircraft.
- the tilt detection device can be installed in or near the cargo room so that an operator who loads and unloads the cargo on the fuselage can be surely recognized an alarm, improving safety, The loading / unloading work can be performed smoothly.
- an aircraft inclination detection apparatus according to the first aspect, further comprising an isolation means for isolating vibration from the airframe between the inclination angle detection means and the airframe. It is characterized by that.
- vibrations caused by outside wind, cargo loading, passengers getting on and off, etc. are isolated from the inclination angle detection means, so that unnecessary alarms (false alarms) are prevented from being issued. Cargo loading and unloading work can be performed smoothly.
- the intensity of the alarm issued by the alarm notification means is increased as the aircraft inclination angle approaches the limit inclination angle. It is characterized by being strengthened.
- an operator who loads and unloads cargo on the fuselage can recognize that the limit of the tilt angle is approaching, and at the same time, loads and loads the cargo so that the limit of the tilt angle is far away. Therefore, the loading / unloading work can be performed smoothly without interruption.
- the aircraft tilt detection apparatus is the aircraft tilt detection apparatus according to the first aspect, wherein the type of alarm issued by the alarm notification means is the forward tilt direction or the rear tilt direction. It differs depending on the direction.
- the alarm since the worker who has recognized the alarm can know the tilt direction of the aircraft, the alarm can be released by mounting the cargo so that it is immediately tilted in the opposite direction. For this reason, the loading / unloading work can be performed smoothly without interruption.
- the cargo loading and unloading method according to the present invention is a method in which an operator who loads and unloads cargo in the cargo compartment of the aircraft obtains the center of gravity management information of the aircraft using the aircraft tilt detection device according to the present invention. It is characterized by performing a loading operation.
- the operator who carries out the loading / unloading work of the cargo can work while grasping the center of gravity management information of the aircraft, it can prevent the aircraft from the tail and the front leg from being damaged. Can be carried out smoothly.
- the operator can grasp the tilt state of the aircraft when loading and unloading cargo on the aircraft. As a result, it is possible to prevent a carcass tail accident and a front leg damage accident and smoothly carry out the loading and unloading work of the cargo.
- FIG. 1 is a diagram showing a situation where cargo loading / unloading work is being carried out in an aircraft cargo compartment.
- the fuselage 1 is provided with a cargo compartment 2 at the tail thereof.
- cargo loading and unloading is performed from an opening 3 provided on the right side of the fuselage.
- a belt loader vehicle 4 is installed outside the opening 3
- the conveyor-type loader 5 is arranged so as to reach the opening 3
- the cargo 8 conveyed by the cargo transport vehicle 6 or the like is loaded by the operator 9. Carrying into room 2 or unloading from cargo room 2.
- the center of gravity of the airframe 1 moves back and forth.
- the center of gravity of the fuselage 1 also moves back and forth in the same manner when cargo is loaded into and unloaded from another cargo chamber (not shown) provided at the front of the fuselage 1 or the like. For this reason, cargo loading / unloading work is not performed simultaneously in the front and rear cargo compartments so that the center of gravity management of the airframe 1 is not confused.
- the tilt detection device 11 is attached to the airframe 1 and the tilt angle of the airframe 1 in the pitch direction is monitored.
- the tilt detection device 11 is installed in the vicinity of the cargo compartment 2 and at a position that can be visually recognized by an operator 9 who loads and unloads cargo in the cargo compartment 2, for example, on the ceiling of the cargo compartment 2 or the lower surface of the tail portion of the fuselage 1. .
- the number of installation may be one.
- the worker 9 performs the cargo loading / unloading operation while obtaining the inclination information of the airframe 1 from the inclination detection device 11.
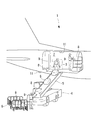
- the inclination detection device 11 is attached with, for example, a gravity sensor 13 (inclination angle detection means) having a weight 12, a hemispherical (dome-shaped) cover 14 covering the gravity sensor 13, and the gravity sensor 13 and the cover 14.
- the board 15 is configured to include an alarm 16 (alarm issuing means) provided outside the cover 14 and a control unit 17 (control means) configured to incorporate, for example, the gravity sensor 13. .
- the gravity sensor 13 detects the tilt angle in the pitch direction when the airframe 1 is parked. Further, the alarm device 16 issues an alarm when the tilt angle detected by the gravity sensor 13 approaches the allowable limit tilt angle in the forward tilt direction and the rear tilt direction of the airframe 1,
- a visual alarm such as a patrol light
- an audible alarm such as a buzzer
- the substrate 15 is provided with suction means such as a sucker, an adhesive part, or a magnet (not shown), and the tilt detection device 11 can be installed at any place on the machine body.
- suction means such as a sucker, an adhesive part, or a magnet (not shown)
- the tilt detection device 11 can be installed at any place on the machine body.
- the inclination detection apparatus 11 can be comprised lightweight, you may install in the airframe 1 stationary.
- the gravity sensor 13 rotates the weight 12 in a hemispherical shape within an angle range of about 180 degrees, and detects the inclination angle of the airframe 1 from the rotation position, so that the weight 12 is naturally suspended by gravity.
- the substrate 15 is installed in the machine body 1 so that the cover 14 is below the substrate 15.
- the tilt detection device 11 has a vibration isolating means between the gravity sensor 13 and the airframe 1 so that vibrations from the airframe 1 are isolated.
- the substrate 15 is formed of rubber, soft resin, or the like, so that the substrate 15 itself serves as a vibration isolating means.
- the present invention is not limited to this.
- a structure in which a vibration isolating member such as a cushion or a spring is interposed between the substrate 15 and the gravity sensor 13 (control unit 17) may be used.
- control unit 17 is input with the center-of-gravity management information unique to the airframe 1 by a storage medium such as the USB memory 20.
- the center-of-gravity management information unique to the aircraft 1 means that the amount of cargo 8 loaded in the cargo compartment 2 changes as the aircraft 1 passes through another airport, the number of passengers on board and the loading of fuel. This is information indicating the current position of the center of gravity of the airframe accompanying this when the amount or the like changes. Note that this information is not limited to the USB memory 20, and the operator 9 may directly input the information to the control unit 17 by providing a numeric keypad on the tilt detection device 11.
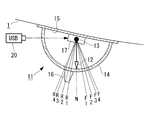
- the cargo loading / unloading operation in the cargo compartment 2 is started in a state where the weight 12 of the inclination detecting device 11 is at the neutral angle N as shown in FIG.
- the center of gravity of the airframe 1 moves back and forth, and when the airframe 1 begins to tilt backward or forward, the weight 12 of the gravity sensor 13 deviates from the neutral angle N.
- the control unit 17 causes the alarm device 16 to issue an alarm.
- the intensity of the alarm issued from the alarm device 16 is gradually increased as the tilt angle of the aircraft 1 approaches the limit tilt angles F4 and R4.
- the buzzer sounds at a low volume at the caution angles R1 and F1
- the buzzer sounds at a medium volume at the warning angles F2 and R2
- the buzzer sounds at a high volume at the danger angles F3 and R3, and the limit inclination angles F4 and R4.
- the buzzer sounds at a loud volume and the patrol light turns on at the same time.
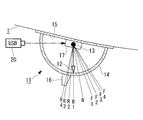
- the tilt information unique to the airframe 1 is input to the control unit 17 by a storage medium such as the USB memory 20 before the loading / unloading operation of the cargo 8 in the cargo compartment 2. That is, the position of the center of gravity of the fuselage 1 calculated based on data such as the cargo and fuel loading amount, loading position, occupant, passenger number of passengers, etc. before the cargo loading / unloading operation is input. Based on this information, the control unit 17 corrects the allowable range until the aircraft body 1 reaches the limit tilt angles F4 and R4 in the forward and backward tilt directions.
- the tilt information (center of gravity information) of the airframe 1 is provided from a control center that manages the operation status of the airframe 1.
- the control unit 17 shifts the movable range forward until the weight 12 of the gravity sensor 13 reaches the limit inclination angle R4 on the backward inclination side. This shift amount is determined according to the current center-of-gravity position of the airframe 1.
- the weight 12 is not at the neutral angle N, but is placed near the caution angle R1, for example.
- the warning of backward tilting has already been issued at the time when the loading / unloading work is started (or just before the warning is issued), and the loading / unloading is performed such that the center of gravity further moves backward from here.
- a stronger warning is issued. Therefore, the operator can grasp the tilted state of the airframe before the buttocks accident of the airframe 1, and can prevent the buttocks accident.
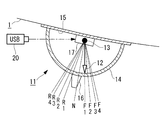
- the control unit 17 shifts the movable range to the rear until the weight 12 of the gravity sensor 13 reaches the limit inclination angle F4 on the forward inclination side. This shift amount is determined according to the current center-of-gravity position of the airframe 1.
- the weight 12 is not at the neutral angle N, but is placed near the caution angle F1, for example.
- a warning of a forward tilt warning has already been issued at the time when the loading / unloading work is started (or just before the warning is issued), and the loading / unloading is performed such that the center of gravity further moves forward from here.
- a stronger warning is issued. Therefore, the operator can grasp the tilted state of the airframe before the front leg breakage accident of the airframe 1 and the front leg breakage accident can be prevented.
- the control unit 17 causes the alarm device 16 to issue an alarm.
- control unit 17 is input with the center of gravity management information unique to the body 1 before the loading and unloading operation of the cargo 8 in the cargo compartment 2, and based on this center of gravity management information, the body 1 is connected to the limit inclination angle F4. , R4, the movable range in the forward and backward tilt directions is corrected. For this reason, the amount of cargo loaded in the cargo compartment 2 has changed, the number of passengers on board, the amount of fuel loaded, etc. have changed, such as when the aircraft 1 passes through another airport. However, such center-of-gravity management information unique to the airframe 1 is input to the control unit 17, and based on this information, the control unit 17 moves forward and backward until the limit inclination angles F4 and R4 are newly reached. Correct the movable range.
- the substrate 15 since the substrate 15 is formed flexibly, the substrate 15 itself plays a role as a vibration isolating means, and vibrations from the airframe 1 are isolated from the gravity sensor 13. Vibration due to mounting, passenger getting on and off, etc. is difficult to be applied to the gravity sensor 13. For this reason, for example, when the weight 12 of the gravity sensor 13 is in the vicinity of the critical point of the attention angle R1 or F1, the gravity sensor 13 reacts sensitively due to the influence of the vibration of the airframe 1, and the alarm 16 is warned (false). Can be prevented smoothly and without causing the loading / unloading operation of the cargo 8 to be interrupted.
- the intensity of the alarm issued by the alarm device 16 is increased stepwise as the inclination angle of the airframe 1 approaches the limit inclination angles F4 and R4.
- the limit of the inclination angle is approaching, and at the same time, it is possible to mount the cargo so that the limit of the inclination angle is far away. That is, for example, when the intensity of the alarm is increased at the same time that a specific cargo 8 is mounted at the rearmost part of the cargo compartment 2, the cargo 8 is installed at the front of the cargo compartment 2, or this cargo 8
- the alarm may be weakened by making a change such as mounting in the cargo compartment. Therefore, the loading / unloading work can be performed smoothly without interruption.
- the worker 9 who has recognized the alarm Since the tilt direction of the aircraft 1 can be known, the cargo 8 can be mounted and removed so as to tilt immediately in the opposite direction, and the alarm can be released. For this reason, the loading / unloading work can be performed smoothly without interruption.
- the operator 9 who loads and unloads the cargo 8 in the cargo compartment 2 of the airframe 1 obtains the center of gravity management information of the airframe 1 from the tilt detection device 11 and loads the cargo 8. Since the removal work is performed, the worker 9 can accurately mount and remove the cargo 8 while grasping the gravity center information (inclined state) of the airframe 1. As a result, it is possible to prevent the tail 1 accident and the front leg damage accident of the airframe 1 and to smoothly carry out the loading / unloading work of the cargo 8.
- the present invention is not limited to the configuration of the above-described embodiment, and may be modified to the extent that it does not depart from the scope of the claims.
- the configuration of the tilt detection device 11 does not necessarily have to be the configuration of the above embodiment.
- a laser level or other angle detection means may be substituted instead of using the gravity sensor 13 as the tilt angle detection means.
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Emergency Alarm Devices (AREA)
- Jib Cranes (AREA)
Abstract
Description
2 貨物室
8 貨物
9 作業者
11 傾き検出装置
12 錘
13 重力センサ(傾斜角度検出手段)
14 カバー
15 基板(免振手段)
16 警報機(警報手段)
17 コントロールユニット(制御手段)
20 USBメモリ
F4,R4 限界傾斜角度
Claims (7)
- 機体の駐機時におけるピッチ方向の傾斜角度を検出する傾斜角度検出手段と、
警報手段と、
前記傾斜角度検出手段により検出された傾斜角度が、前記機体の前傾方向および後傾方向の、許容される限界傾斜角度に近付いた時に、前記警報発報手段に警報を発報させる制御手段と、
を備えたことを特徴とする航空機の傾き検出装置。 - 前記制御手段は、前記機体への貨物の搭除載作業の前に、該機体の固有の重心管理情報を入力され、この重心管理情報に基づいて前記限界傾斜角度に達するまでの前傾方向および後傾方向への可動範囲を補正することを特徴とする請求項1に記載の航空機の傾き検出装置。
- 前記機体の任意の場所に設置することができることを特徴とする請求項1に記載の航空機の傾き検出装置。
- 前記傾斜角度検出手段と、前記機体との間に、前記機体からの振動を免振する免振手段を有することを特徴とする請求項1に記載の航空機の傾き検出装置。
- 前記警報発報手段が発報する警報の強度は、前記機体の傾斜角度が前記限界傾斜角度に近付くにつれて段階的に強められることを特徴とする請求項1に記載の航空機の傾き検出装置。
- 前記警報発報手段が発報する警報の種類は、前記機体の傾斜方向が前傾方向であるか後傾方向であるかによって異なることを特徴とする請求項1に記載の航空機の傾き検出装置。
- 機体の貨物室に貨物を搭除載する作業者が、請求項1に記載の航空機の傾き検出装置により、機体の重心管理情報を得ながら貨物の搭除載作業を行うことを特徴とする貨物の積み降ろし方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/122,762 US9205930B2 (en) | 2011-06-01 | 2011-06-01 | Inclination detection device for aircraft, and method for loading and unloading cargo using same |
| JP2013517765A JP5822923B2 (ja) | 2011-06-01 | 2011-06-01 | 航空機の傾き検出装置およびこれを用いた貨物の積み降ろし方法 |
| PCT/JP2011/062637 WO2012164708A1 (ja) | 2011-06-01 | 2011-06-01 | 航空機の傾き検出装置およびこれを用いた貨物の積み降ろし方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2011/062637 WO2012164708A1 (ja) | 2011-06-01 | 2011-06-01 | 航空機の傾き検出装置およびこれを用いた貨物の積み降ろし方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012164708A1 true WO2012164708A1 (ja) | 2012-12-06 |
Family
ID=47258593
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/062637 WO2012164708A1 (ja) | 2011-06-01 | 2011-06-01 | 航空機の傾き検出装置およびこれを用いた貨物の積み降ろし方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9205930B2 (ja) |
| JP (1) | JP5822923B2 (ja) |
| WO (1) | WO2012164708A1 (ja) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2815982B1 (en) * | 2013-06-21 | 2018-06-20 | Airbus Operations GmbH | Cargo compartment and method for loading a cargo compartment |
| US20180216988A1 (en) * | 2013-10-01 | 2018-08-02 | C. Kirk Nance | Method and apparatus for monitoring and avoidance of unanticipated loads applied to aircraft landing gear |
| US9522741B2 (en) * | 2015-02-18 | 2016-12-20 | The Boeing Company | Aircraft tipping alarm system and method using fluid pressure measurement on nose landing gear shock strut |
| US10132709B2 (en) * | 2015-08-14 | 2018-11-20 | The Boeing Company | System and method for detecting vehicle anomalies during ground travel |
| US11136105B2 (en) | 2017-08-02 | 2021-10-05 | Joby Elevate, Inc. | VTOL aircraft for network system |
| CA3076391A1 (en) | 2017-09-29 | 2019-04-04 | Bombardier Inc. | Method, system, and graphical indicator for providing a lateral center of gravity of an aircraft |
| US10759537B2 (en) | 2017-11-03 | 2020-09-01 | Uber Technologies, Inc. | Safe vertical take-off and landing aircraft payload assignment |
| US10913528B1 (en) * | 2017-11-03 | 2021-02-09 | Uber Technologies, Inc. | Safe vertical take-off and landing aircraft payload distribution and adjustment |
| AU2019259340A1 (en) | 2018-04-24 | 2020-12-17 | Joby Aero, Inc. | Determining VTOL departure time in an aviation transport network for efficient resource management |
| US11238745B2 (en) | 2018-05-07 | 2022-02-01 | Joby Aero, Inc. | Dynamic aircraft routing |
| US10593215B2 (en) | 2018-05-07 | 2020-03-17 | Uber Technologies, Inc. | Dynamic aircraft routing |
| CN109229390B (zh) * | 2018-10-23 | 2022-04-05 | 西北工业大学 | 一种多地不停站陆空一体化货物运输系统 |
| US10589872B1 (en) * | 2019-01-29 | 2020-03-17 | Rockwell Collins, Inc. | Augmented weight sensing for aircraft cargo handling systems |
| US10837786B2 (en) | 2019-03-18 | 2020-11-17 | Uber Technologies, Inc. | Multi-modal transportation service planning and fulfillment |
| US12211392B2 (en) | 2019-12-31 | 2025-01-28 | Joby Aero, Inc. | Systems and methods for providing aircraft sensory cues |
| US12012229B2 (en) | 2020-03-06 | 2024-06-18 | Joby Aero, Inc. | System and method for robotic charging aircraft |
| US20210309354A1 (en) * | 2020-04-07 | 2021-10-07 | MightyFly Inc. | System and method for package transportation |
| US11988742B2 (en) * | 2020-04-07 | 2024-05-21 | MightyFly Inc. | Detect and avoid system and method for aerial vehicles |
| US12157580B2 (en) | 2020-04-29 | 2024-12-03 | Joby Aero, Inc. | Systems and methods for transferring aircraft |
| US11893521B2 (en) | 2020-09-01 | 2024-02-06 | Joby Aero, Inc. | Systems and methods for facilitating aerial vehicle services |
| CN112304408B (zh) * | 2020-11-24 | 2022-09-16 | 贵州航天特种车有限责任公司 | 一种多机型飞机重量重心自动化测量装置 |
| KR20230107983A (ko) | 2022-01-10 | 2023-07-18 | 현대자동차주식회사 | 화물 로딩 및 언로딩 장치 |
| CN114486168B (zh) * | 2022-04-19 | 2022-06-17 | 中国空气动力研究与发展中心低速空气动力研究所 | 一种三自由度模型飞行试验角度限位装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5693017A (en) * | 1979-12-12 | 1981-07-28 | Sundstrand Data Control | Weight* balance* and tire pressure detector |
| JPS62187696A (ja) * | 1986-02-13 | 1987-08-17 | 株式会社 タグ | 航空機の姿勢検出方式 |
| JPH02501562A (ja) * | 1988-04-11 | 1990-05-31 | サンドストランド・データ・コントロール・インコーポレーテッド | 失速保護を有するウインド・シア回復案内装置 |
| JP2001328598A (ja) * | 2000-05-20 | 2001-11-27 | Toshiko Fujisaki | 態勢確認具 |
| JP2010261798A (ja) * | 2009-05-07 | 2010-11-18 | Seiko Epson Corp | 姿勢検出装置、姿勢制御装置及び姿勢制御装置の制御方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4302325B2 (ja) * | 1998-12-02 | 2009-07-22 | 三洋機工株式会社 | 火炎焼入れにおけるワーク加熱温度の監視方法および装置 |
| ITUD20010206A1 (it) * | 2001-12-12 | 2003-06-12 | Univ Degli Studi Udine | Dispositivo elettrostimolatore per utilizzatori di mezzi di trasporto |
| US7967244B2 (en) * | 2006-11-16 | 2011-06-28 | The Boeing Company | Onboard aircraft weight and balance system |
| US8515656B2 (en) * | 2007-11-02 | 2013-08-20 | Goodrich Corporation | Integrated aircraft cargo loading and monitoring system |
| US7944372B2 (en) * | 2008-04-18 | 2011-05-17 | The Boeing Company | Aircraft tip alarm system |
| US8226040B2 (en) * | 2008-08-25 | 2012-07-24 | Embraer S.A. | Continuous fuel management system for automatic control of aircraft center of gravity |
| US20100063718A1 (en) * | 2008-09-10 | 2010-03-11 | Schmidt Willard H | Aircraft center of gravity automatic calculating system |
| US8060296B2 (en) * | 2008-11-12 | 2011-11-15 | Honeywell International Inc. | Low cost aircraft center of gravity monitoring systems and methods |
-
2011
- 2011-06-01 JP JP2013517765A patent/JP5822923B2/ja not_active Expired - Fee Related
- 2011-06-01 WO PCT/JP2011/062637 patent/WO2012164708A1/ja active Application Filing
- 2011-06-01 US US14/122,762 patent/US9205930B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5693017A (en) * | 1979-12-12 | 1981-07-28 | Sundstrand Data Control | Weight* balance* and tire pressure detector |
| JPS62187696A (ja) * | 1986-02-13 | 1987-08-17 | 株式会社 タグ | 航空機の姿勢検出方式 |
| JPH02501562A (ja) * | 1988-04-11 | 1990-05-31 | サンドストランド・データ・コントロール・インコーポレーテッド | 失速保護を有するウインド・シア回復案内装置 |
| JP2001328598A (ja) * | 2000-05-20 | 2001-11-27 | Toshiko Fujisaki | 態勢確認具 |
| JP2010261798A (ja) * | 2009-05-07 | 2010-11-18 | Seiko Epson Corp | 姿勢検出装置、姿勢制御装置及び姿勢制御装置の制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2012164708A1 (ja) | 2014-07-31 |
| JP5822923B2 (ja) | 2015-11-25 |
| US9205930B2 (en) | 2015-12-08 |
| US20140097297A1 (en) | 2014-04-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5822923B2 (ja) | 航空機の傾き検出装置およびこれを用いた貨物の積み降ろし方法 | |
| KR102009815B1 (ko) | 비상 부양 시스템을 구비한 항공기 | |
| EP2108585B1 (en) | System and method for prevention of inadvertent escape slide deployment for an aircraft | |
| US8226042B1 (en) | Spin control system for a suspended object that is to be deployed in or recovered from water | |
| US8565981B2 (en) | Method of controlling a buoyancy system for an aircraft, and a control system implementing said method | |
| JP5819555B1 (ja) | 車両運転支援システム | |
| US20100004803A1 (en) | Smart recovery system | |
| EP2206664A1 (en) | Method for docking of a vehicle, such as a truck, at a loading and unloading platform, and buffer | |
| US20100038481A1 (en) | Systems and Methods for Recovering an Airship | |
| JP2012514553A (ja) | 巡航監視及び警報システムと方法 | |
| US20090182465A1 (en) | Damage detection system | |
| CN105008218B (zh) | 用于在海上运输船舶和构造物或船舶之间转移对象的改进设备和方法 | |
| US9004400B2 (en) | Method of controlling a buoyancy system for an aircraft, a buoyancy system implementing said method, and an aircraft | |
| EP2899124A1 (en) | Vehicle cargo compartment, system, and vehicle | |
| CN110546071A (zh) | 无人飞行装置、报告器、飞行体以及报告器释放装置 | |
| US20190047702A1 (en) | Aerial vehicle | |
| KR20150058789A (ko) | 해양구조물의 구명보트 서비스 플랫폼 장치 | |
| JP2018111474A (ja) | 無人航空機(ドローン)の落下防止 | |
| CN105539764A (zh) | 改进的水中航行器自救装置 | |
| KR101636045B1 (ko) | 구명정자동투하장치 | |
| KR101901582B1 (ko) | 무인비행체 추락 감지장치 | |
| KR101518293B1 (ko) | 구명정을 구비한 선박 | |
| KR101706990B1 (ko) | 프로펠러 자동 급제동 및 경고 장치 및 방법 | |
| CN209126853U (zh) | 救援轮组件及搬运小车 | |
| EP4103471A1 (en) | Apparatus, system and method of data recording |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11866693 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2013517765 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14122762 Country of ref document: US |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 11866693 Country of ref document: EP Kind code of ref document: A1 |