WO2012144341A1 - レーザレーダ - Google Patents
レーザレーダ Download PDFInfo
- Publication number
- WO2012144341A1 WO2012144341A1 PCT/JP2012/059448 JP2012059448W WO2012144341A1 WO 2012144341 A1 WO2012144341 A1 WO 2012144341A1 JP 2012059448 W JP2012059448 W JP 2012059448W WO 2012144341 A1 WO2012144341 A1 WO 2012144341A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- laser
- mirror
- light
- light source
- laser light
- Prior art date
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4811—Constructional features, e.g. arrangements of optical elements common to transmitter and receiver
- G01S7/4812—Constructional features, e.g. arrangements of optical elements common to transmitter and receiver transmitted and received beams following a coaxial path
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/101—Scanning systems with both horizontal and vertical deflecting means, e.g. raster or XY scanners
Definitions
- the present invention relates to a laser radar that detects the state of a target area based on reflected light when the target area is irradiated with laser light.
- laser radar has been used for security applications such as intrusion detection into buildings.
- the radar radar scans a laser beam within a target area, and detects the presence or absence of an obstacle at each scan position from the presence or absence of reflected light at each scan position. Further, the distance to the obstacle at each scan position is detected based on the required time from the laser beam irradiation timing at each scan position to the reflected light reception timing.
- a configuration of the laser radar for example, a configuration in which a projection optical system that irradiates laser light and a light receiving optical system that receives reflected light from a target region are arranged in the same housing can be used (Patent Document 1).
- the reflected light from the target area is received by a photodetector arranged in the light receiving optical system.
- a signal having a magnitude corresponding to the amount of received light is output from the photodetector.
- this signal exceeds a predetermined threshold, it is determined that an obstacle exists at the scan position. Further, the timing when this signal exceeds the threshold is set as the light reception timing of the reflected light, and the distance to the obstacle at the scan position is measured as described above.
- the laser beam is set to a very high emission intensity in order to detect an obstacle at a long distance.
- a part of the laser light may be reflected or diffracted by an optical element or the like in the housing, and may enter the photodetector as stray light.
- the output signal from the photodetector includes an error, and the measurement accuracy of the distance to the obstacle is lowered.
- the time difference between the irradiation timing of the laser light and the reception timing of the reflected light is shortened, so that the output signal of the photodetector due to the reflected light and the output signal of the photodetector due to the stray light are mutually Easy to overlap. For this reason, especially when the obstacle is at a short distance, the measurement accuracy of the obstacle is easily deteriorated by the stray light reflected or diffracted in the housing.
- the present invention has been made in view of such problems, and provides a laser radar capable of properly receiving reflected light from a target area even when the projection optical system and the light receiving optical system are in the same housing.
- the purpose is to do.
- a laser radar includes a laser light source that emits laser light, a mirror that reflects the laser light toward a target area, and the mirror that drives the mirror so that the laser light scans the target area.
- a driving unit that collects the reflected light of the laser light reflected by the mirror and reflected by the mirror, and receives the reflected light collected by the light collecting element.
- a photodetector The laser light source is disposed in an optical path between the mirror and the condensing element, and the mirror has a size such that the reflected light passes through the laser light source and enters the condensing element.
- the present invention it is possible to provide a laser radar that can properly receive reflected light from a target area even when the projection optical system and the light receiving optical system are in the same housing.
- FIG. 1 is an exploded perspective view of a mirror actuator 25 mounted on the laser radar according to the present embodiment.
- the mirror actuator 25 includes a mirror unit 60, a magnet unit 70, and a servo unit 80.
- the mirror unit 60 includes a mirror unit frame 61, pan coil mounting plates 62 and 63, suspension wire fixing substrates 64a, 64b and 65, suspension wires 66a to 66d, and a support shaft 67. And an LED 68 and a mirror 69.
- the mirror unit frame 61 is made of a frame member having a rectangular outline when viewed from the front.
- the mirror unit frame 61 is provided with two tilt coil mounting portions 61a on the left and right side surfaces, respectively.
- the tilt coil mounting portion 61a on each side surface is disposed at a position symmetrical in the vertical direction from the center of each side surface.
- a tilt coil 61b is wound and fixed to each of the four tilt coil mounting portions 61a.
- the mirror unit frame 61 is formed with shaft holes 61c arranged on the left and right and grooves 61e arranged on the top and bottom.
- the shaft hole 61c is disposed at the center position of the left and right side surfaces, and the groove 61e extends to the center position of the upper and lower side surfaces.
- a bearing 61d is attached to each of the shaft holes 61c from the left and right.
- the bottom surface of the mirror unit frame 61 has a comb-like shape, and includes two wire holes 61f for passing the suspension wires 66a and 66b, two wire holes 61g for passing the suspension wires 66c and 66d, and will be described later.
- Three wire holes 61h for passing the suspension wires 76a to 76c and three wire holes 61i for passing the suspension wires 76d to 76f are formed.
- the wire holes 61h and 61i are formed to be slightly larger than the diameters of the suspension wires 76a to 76f in order to fix the suspension wires 76a to 76f by inclining backward.
- the suspension wires 76a to 76f can be stretched in a curved shape in a direction away from the mirror 69.
- the pan coil mounting plate 62 has two pan coil mounting portions 62a, two wire holes 62c for passing the suspension wires 66a and 66b, two wire holes 62d for passing the suspension wires 66c and 66d, and a support shaft 67.
- a shaft hole 62e is provided for passing through.
- the wire hole 62c is formed so as to be linearly aligned with the wire hole 61f in the vertical direction
- the wire hole 62d is formed so as to be linearly aligned with the wire hole 61g in the vertical direction.
- Two pan coils 62b are wound and fixed to the two pan coil mounting portions 62a, respectively.
- the pan coil mounting plate 63 is provided with a shaft hole 63c through which the two pan coil mounting portions 63a and the support shaft 67 are passed. Two pan coils 63b are wound and fixed to the pan coil mounting portion 63a.
- the suspension wire fixing substrates 64a and 64b are respectively formed with two terminal holes 64c for passing the suspension wires 66a and 66b and two terminal holes 64d for passing the suspension wires 66c and 66d (FIG. 2). (See (b)). As described later, at the positions of the terminal holes 64c and 64d, the pan coils 62b and 63b and the lead wires for supplying current to the LEDs 68 are electrically connected to the suspension wires 66a to 66d by solder or the like. The suspension wire fixing substrates 64a and 64b are fixed by being bonded to the pan coil mounting plate 62 so that the two terminal holes 64c and 64d and the wire holes 62c and 62d are aligned.
- the suspension wire fixing substrate 65 has two terminal holes 65a for passing the suspension wires 66a and 66b, two terminal holes 65b for passing the suspension wires 66c and 66d, and 3 for passing the suspension wires 76a to 76c.
- Three terminal holes 65d and three terminal holes 65d are formed to allow the suspension wires 76d to 76f (see FIG. 1) to pass therethrough.
- the three terminal holes 65c and 65d are formed to be slightly larger than the diameters of the suspension wires 76a to 76f in order to stretch the suspension wires 76a to 76f in a curved shape, similarly to the wire holes 61h and 61i.
- the suspension wire fixing substrate 65 is formed with circuit patterns P1 and P2 for electrically connecting the two terminal holes 65a and two of the three terminal holes 65c. .
- the suspension wire fixing substrate 65 is formed with circuit patterns P3 and P4 that electrically connect the two terminal holes 65b and two of the three terminal holes 65d.
- the suspension wire fixing substrate 65 includes a terminal hole 65a and a wire hole 61f, a terminal hole 65b and a wire hole 61g, a terminal hole 65c and a wire hole 61h, and a terminal hole 65d and a wire hole 61i.
- the mirror unit frame 61 is adhered and fixed so as to be aligned with each other.
- the suspension wires 66a to 66d are made of phosphor bronze, beryllium copper, etc., and have excellent conductivity and spring properties.
- the suspension wires 66a to 66d have a circular cross section.
- the suspension wires 66a to 66d have the same shape and characteristics as each other, and are used to supply a stable load when supplying current to the pan coils 62b and 63b and the LED 68 and rotating the mirror 69 in the Pan direction.
- the support shaft 67 has a hole 67a for inserting the LED board fixing arm 68b, holes 67b and 67c for passing a lead wire for electrically connecting the pan coil 63b and the LED 68, and a step portion for fitting the mirror 69. 67d is formed. Further, the inside of the support shaft 67 is hollow in order to pass a conducting wire that electrically connects the pan coil 63b and the LED 68.
- the support shaft 67 is used as a rotation shaft that rotates the mirror 69 in the Pan direction, as will be described later.
- the LED 68 is a diffusion type (wide directional type) and can diffuse light over a wide range. As will be described later, the diffused light from the LED 68 is used to detect the scanning position within the target area of the laser beam for scanning.
- the LED 68 is attached to the LED substrate 68a.
- the LED board 68 a is attached to the hole 67 a of the support shaft 67 after being bonded to the LED board fixing arm 68 b.
- the bearing 67e and the polyslider washer 67f are attached to the shafts at both ends of the support shaft 67.
- the two bearings 67e are fitted into the grooves 61e formed in the mirror unit frame 61.
- the shaft hole 62e of the pan coil mounting plate 62 and the shaft hole 63c of the pan coil mounting plate 63 are passed through the support shaft 67 from above and below, and are fixedly bonded to the support shaft 67.
- suspension wires 66a and 66b are passed through the terminal holes 65a of the suspension wire fixing substrate 65 through the two terminal holes 64c, the two wire holes 62c, and the two wire holes 61f of the suspension wire fixing substrate 64a.
- the suspension wires 66c and 66d pass through the two terminal holes 64d of the suspension wire fixing board 64b, the two wire holes 62d, and the two wire holes 61g to the terminal hole 65b of the suspension wire fixing board 65. Is done.
- the suspension wires 66a to 66d are soldered to the suspension wire fixing substrates 64a, 64b and 65 together with the pan coils 62b and 63b and the lead wires for supplying current to the LEDs 68, respectively.
- the mirror 69 can rotate around the support shaft 67 in the Pan direction.
- the suspension wire fixed substrates 64a and 64b rotate in the Pan direction as the mirror 69 rotates in the Pan direction.
- the assembled mirror unit 60 is accommodated in the opening of the magnet unit frame 71.
- the magnet unit 70 includes a magnet unit frame 71, eight pan magnets 72, eight tilt magnets 73, two support shafts 74, a suspension wire fixing substrate 75, and suspension wires 76a to 76f.
- the protective cover 77 is provided.
- the magnet unit frame 71 is made of a frame member having a rectangular outline when viewed from the front.
- a shaft hole 71 a for passing the support shaft 74 and a screw hole 71 b for fixing the support shaft 74 are formed in the center of the left and right side surfaces of the magnet unit frame 71.
- On the upper surface of the magnet unit frame 71 two screw holes 71c for fixing the suspension wire fixing substrate 75 are formed.
- four flanges protruding inside the magnet unit frame 71 are formed, and screws for fixing the protective cover 77 are formed on these four flanges.
- a hole 71d is formed at the front ends of the upper and lower inner side surfaces of the magnet unit frame 71.
- the magnet unit frame 71 Furthermore, at the rear ends of the upper and lower inner side surfaces of the magnet unit frame 71, four flanges protruding inside the magnet unit frame 71 are formed, and the servo unit frame 81 is fixed to these four flanges. Screw holes 71e are formed.
- the eight pan magnets 72 are attached to the upper and lower inner surfaces of the magnet unit frame 71. Further, the eight tilt magnets 73 are attached to the left and right inner surfaces of the magnet unit frame 71.
- the two support shafts 74 are each formed with two screw holes 74b.
- the two support shafts 74 are fitted into the bearings 61 d of the mirror unit frame 61 through the shaft holes 71 a formed in the magnet unit frame 71 with the poly slider washer 74 a attached.
- the two screws 74c are screwed into the two screw holes 71b of the magnet unit frame 71 through the two screw holes 74b.
- the support shaft 74 is used as a rotation shaft that rotates the mirror 69 in the tilt direction, as will be described later.
- the suspension wire fixing substrate 75 is formed with two screw holes 75a and three terminal holes 75c and 75d for passing the suspension wires 76a to 76f.
- the three terminal holes 75c and 75d are formed slightly larger than the diameter of the suspension wires 76a to 76f in order to stretch the suspension wires 76a to 76f in a curved shape.
- the suspension wire fixing substrate 75 is formed with a circuit pattern for supplying a signal to the terminal holes 75c and 75d.
- the suspension wires 76a to 76f are made of phosphor bronze, beryllium copper, etc., and have excellent conductivity and spring properties.
- the suspension wires 76a to 76f have a circular cross section.
- the suspension wires 76a to 76f have the same shape and characteristics as each other, and are used to supply a stable load when the tilt coil 61b, the pan coils 62b and 63b and the LED 68 are supplied with current, and the mirror 69 is rotated in the tilt direction. Is done.
- the suspension wire fixing substrate 75 is attached to the upper surface of the magnet unit frame 71.
- the two screws 75b are screwed into the two screw holes 71c through the two screw holes 75a.
- the suspension wire fixing substrate 75 is fixed to the magnet unit frame 71.
- suspension wires 76a to 76c are passed through the three terminal holes 75c of the suspension wire fixing substrate 75 and the three wire holes 61h of the mirror unit frame 61, and then the terminal holes 65c of the suspension wire fixing substrate 65 (FIG. 2A ))).
- suspension wires 76d to 76f pass through the three terminal holes 75d of the suspension wire fixing substrate 75 and the three terminal holes 65d of the suspension wire fixing substrate 65 through the three wire holes 61i of the mirror unit frame 61 (see FIG. 2 (a)).
- suspension wires 76a to 76f are soldered to the suspension wire fixing substrates 65 and 75 together with the tilt coil 61b, the pan coils 62b and 63b, and the lead wires for supplying current to the LEDs 68, respectively.
- the suspension wires 76 a to 76 f are stretched in a curved shape in a direction away from the mirror 69. That is, the upper ends of the suspension wires 76a to 76f are fixed to the terminal holes 75c and 75d so as to incline backward as they move away from the terminal holes 75c and 75d.
- the lower ends of the suspension wires 76a to 76f are fixed to the wire holes 61h and 61i and the terminal holes 65b and 65c so as to be inclined backward as they are separated from the wire holes 61h and 61i and the terminal holes 65b and 65c.
- the structure shown in FIG. 3 is completed.
- the mirror unit frame 61 can be rotated around the support shaft 74 in the tilt direction.
- the suspension wire fixing substrate 65 rotates in the tilt direction as the mirror unit frame 61 rotates in the tilt direction.
- FIG. 3 is a perspective view of the structure in a state where the mirror unit 60 is attached to the magnet unit 70.
- FIG. 3A is a perspective view of the structural body as viewed from the front of FIG. 2
- FIG. 3B is a perspective view of the structural body as viewed from the rear of FIG.
- both ends of suspension wire 66a are connected to one inside two terminal holes 64c and one inside two terminal holes 65a, respectively.
- both ends of the suspension wire 66c are connected to one inside the two terminal holes 64d and one inside the two terminal holes 65b.
- Both ends of the suspension wire 66b are connected to one outside of the two terminal holes 64c and one outside of the two terminal holes 65a.
- both ends of the suspension wire 66d are connected to one outside the two terminal holes 64d and one outside the two terminal holes 65b.
- Both ends of the suspension wire 76a are connected to one inside the three terminal holes 75c and one inside the three terminal holes 65c.
- both ends of the suspension wire 76d are connected to one inside the three terminal holes 75d and one inside the three terminal holes 65d.
- Both ends of the suspension wire 76b are connected to one center of the three terminal holes 75c and one center of the three terminal holes 65c.
- both ends of the suspension wire 76e are connected to one center of the three terminal holes 75d and one center of the three terminal holes 65d.
- Both ends of the suspension wire 76c are connected to one outside of the three terminal holes 75c and one outside of the three terminal holes 65c.
- both ends of the suspension wire 76f are connected to one outside of the three terminal holes 75d and one outside of the three terminal holes 65d.
- reference numeral 75e denotes a terminal.
- a drive signal for driving the mirror 69 in the Pan direction and the Tilt direction and a drive signal for lighting the LED 68 are supplied via the terminal 75e.
- Each terminal 75e is connected to one of the terminal holes 75c and 75d via a circuit pattern on the suspension wire fixing substrate 75, respectively.
- the servo unit 80 includes a servo unit frame 81, a pinhole mounting bracket 82, a pinhole plate 83, a PSD substrate 84, and a PSD85.
- the servo unit frame 81 is made of a frame member having a rectangular outline when viewed from the front. On the left and right side surfaces of the servo unit frame 81, two screw holes 81a for fixing the pinhole mounting bracket 82 are formed. In addition, at the front end of the upper and lower inner surfaces of the servo unit frame 81, four flanges protruding inside the servo unit frame 81 are formed, and screw holes 81c are respectively formed on these four flanges. Yes. Further, at the rear ends of the left and right inner surfaces of the servo unit frame 81, four flanges projecting inside the servo unit frame 81 are formed, and screw holes 81e are respectively formed on these four flanges. ing.
- Two screw holes 82 a are formed on the left and right side surfaces of the pinhole mounting bracket 82.
- two screw holes 82b for fixing the pinhole plate 83 and an opening 82c for guiding the servo light emitted from the LED 68 to the PSD 85 via the pinhole 83a are provided on the back surface of the pinhole mounting bracket 82. Is formed.
- a pinhole 83a and two screw holes 83b are formed in the pinhole plate 83.
- the pinhole 83a allows a part of the diffused light emitted from the LED 68 to pass therethrough.
- PSD substrate 84 In the PSD substrate 84, four screw holes 84a for fixing the PSD substrate 84 to the servo unit frame 81 are formed.
- a PSD 85 is mounted on the PSD substrate 84.
- the PSD 85 outputs a signal corresponding to the light receiving position of the servo light.
- the pinhole plate 83 When assembling the servo unit 80, the pinhole plate 83 is applied to the back surface of the pinhole mounting bracket 82. In this state, the two screws 83c are screwed into the two screw holes 82b through the two screw holes 83b. As a result, the pinhole plate 83 is fixed to the pinhole mounting bracket 82.
- the pinhole mounting bracket 82 is accommodated in the servo unit frame 81.
- the four screw holes 81a and the four screw holes 82a are combined, and the four screws 81b from the left and right are respectively screwed into the screw holes 81a and the screw holes 82a.
- the pinhole mounting bracket 82 is fixed to the servo unit frame 81.
- FIG. 4 is a perspective view of the assembled servo unit 80 viewed from the front
- FIG. 4B is a perspective view of the assembled servo unit 80 viewed from the rear.
- FIG. 5A is a perspective view of the mirror actuator 25 viewed from the front
- FIG. 5B is a perspective view of the mirror actuator 25 viewed from the rear.
- the eight pan magnets 72 flow the current through the pan coils 62 b and 63 b (see FIG. 2A), thereby attaching the support shaft 67 to the pan coil mounting plates 62 and 63.
- Arrangement and polarity are adjusted so that the turning power of the shaft is generated. Therefore, when a current is passed through the pan coils 62b and 63b, the support shaft 67 is rotated together with the pan coil mounting plates 62 and 63 by the electromagnetic driving force generated in the pan coils 62b and 63b, so that the mirror 69 is centered on the support shaft 67. Rotate.
- the rotation direction of the mirror 69 around the support shaft 67 is referred to as the Pan direction.
- the mirror 69 is returned to the position before the rotation by the spring property of the suspension wires 66a to 66d.
- the eight tilt magnets 73 flow the current through the tilt coil 61b (see FIG. 2A), so that the mirror unit frame 61 has the support shaft 74 as an axis. Arrangement and polarity are adjusted so that rotational power is generated. Therefore, when an electric current is passed through the tilt coil 61b, the mirror unit frame 61 is rotated about the support shaft 74 by the electromagnetic driving force generated in the tilt coil 61b, and the mirror 69 is rotated integrally with the mirror unit frame 61. To do.
- the rotation direction of the mirror 69 around the support shaft 74 is referred to as a tilt direction.
- the mirror unit frame 61 is returned to the position before the rotation by the spring property of the suspension wires 76a to 76f.
- the mirror 69 can be rotated in the Pan direction and the Tilt direction.
- the support shaft 67 is rotated by the pan coil mounting plates 62 and 63 having a size smaller than that of the mirror unit frame 61, the mirror 69 can be rotated more smoothly than in the tilt direction. Can do.
- the mirror 69 can be rotated at a larger angle than the rotation in the Tilt direction. it can.
- the large mirror 69 can be driven with high response. For this reason, the reflected light from the target area can be received by the large mirror 69.
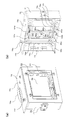
- 6 and 7 are diagrams showing a configuration of the laser radar 1 in a state where the mirror actuator 25 according to the embodiment is mounted.
- FIG. 6A is a perspective view of the inside of the laser radar 1 seen from the side
- FIG. 6B is an external perspective view of the laser radar 1.
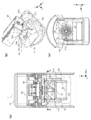
- FIG. 7A is a cross-sectional view taken along the line AA ′ in FIG. 6A
- FIG. 7B is a partial perspective view showing only the laser unit 20, the mirror actuator 25, and the lens barrel 40.
- FIG. 7C is a cross-sectional view taken along the line BB ′ in FIG.
- the laser radar 1 includes a housing 10, a laser unit 20, a light receiving unit 30, a lens barrel 40, a projection / light receiving window 50, and a circuit board 100.
- the housing 10 has a cubic shape, and accommodates the laser unit 20, the mirror actuator 25, the light receiving unit 30, and the circuit board 100 therein. As shown in FIG. 6B, a projection / light receiving window 50 is mounted on the front surface of the housing 10.
- the laser unit 20 includes a laser light source 21, a beam shaping lens 22, and a laser holder 23.
- the laser light source 21 emits laser light having a wavelength of about 900 nm. Since the laser light source 21 increases the scanning range of the laser beam in the target area by the rotation of the mirror 69 in the Pan direction, the emission direction of the laser beam is from the vertical direction (Y axis positive direction) to the in-plane direction of the YZ plane. It arrange
- the beam shaping lens 22 is attached to the laser holder 23 so that its optical axis coincides with the outgoing optical axis of the laser light source 21. Further, the beam shaping lens 22 converges the emitted laser light so that the emitted laser light has a predetermined shape in the target region.
- the beam shape is set so that the beam shape in the target area (in the present embodiment, set at a position several tens of meters forward from the projection / light receiving window 50) becomes an elliptical shape of about 2 m in length and about 0.2 m in width.
- a shaping lens 22 is designed.
- the laser holder 23 has a cylindrical shape whose diameter is slightly larger than that of the laser light source 21 and the beam shaping lens 22, holds the laser light source 21 inside, and the beam shaping lens 22 is mounted on the front.
- the laser holder 23 has two projecting portions 23a projecting in the X-axis positive direction and the X-axis negative direction.
- the protrusion 23a has a triangular blade shape in order to reduce the area where the reflected light from the target area is blocked. The relationship between the formation direction and shape of the protrusion 23a and the reflected light from the target area will be described later with reference to FIG.
- the laser light source 21 is electrically connected to a circuit board 21a mounted on the lens barrel 40.
- a transparent wiring or the like that transmits light is used in order to prevent the reflected light from the target area from being blocked.
- the transparent wiring or the like is connected to the circuit board 21a along the lower part of the protrusion 23a formed on the laser holder 23.
- the mirror actuator 25 when the mirror 69 is in the neutral position, the mirror actuator 25 has an incident angle of the laser light emitted from the mirror surface of the mirror 69 of the mirror actuator 25 and the laser light source 21 (for example, 60 degrees).
- the “neutral position” means a position where the mirror 69 is not rotated by the mirror actuator 25 and is perpendicular to the front-rear direction of FIG.
- the laser light from the beam shaping lens 22 is incident on the approximate center of the mirror 69.
- the mirror actuator 25 is disposed such that the support shaft 74 (see FIG. 1) is parallel to the X axis (parallel to the bottom surface 10a of the housing 10). Further, in the mirror actuator 25, the mirror surface of the mirror 69 approaches the bottom surface 10a (XZ plane) in the in-plane direction of the YZ plane from a state perpendicular to the bottom surface 10a (XZ plane) of the housing 10. It arrange
- a predetermined angle for example, 30 degree
- the laser light source 21 is configured so that the laser beam emission direction is inclined by a predetermined angle (for example, 30 degrees) toward the mirror 69 in the in-plane direction of the YZ plane from the vertical direction (Y-axis positive direction). Be placed.
- the output optical axis of the laser light source 21 is perpendicular to the support shaft 74 of the mirror actuator 25 and is inclined at a predetermined angle (for example, 60 degrees) with respect to the mirror surface of the mirror 69.
- the laser light source 21 and the mirror actuator 25 By arranging the laser light source 21 and the mirror actuator 25 in this way, the laser light emitted from the laser light source 21 when the mirror 69 is in the neutral position is reflected by the mirror 69 and proceeds in the positive direction of the Z axis. Become. Further, when the laser light source 21 and the mirror actuator 25 are arranged in this manner, the laser light source 21 and the beam shaping lens 22 do not exist in the horizontal direction shown in FIG. 6B, so that the swing angle of the laser light in the horizontal direction is increased. be able to.
- the mirror actuator 25 includes the mirror 69 on which the outgoing laser light transmitted through the beam shaping lens 22 and the reflected light from the target area are incident, and a mechanism for rotating the mirror 69 about two axes. With. As the mirror 69 rotates, the emitted laser beam is scanned in the target area. Further, the reflected light from the target area travels back along the optical path of the emitted laser light toward the target area and enters the mirror 69. The reflected light that has entered the mirror 69 is reflected by the mirror 69 and enters the light receiving lens 32 through the gap between the laser holder 23 and the lens barrel 40.
- the reflected light from the target area reflected by the mirror 69 travels parallel to the optical axis of the beam shaping lens 22.
- the width of the reflected light from the target area reflected by the mirror 69 is sufficiently larger than the width of the laser holder 23.
- the size of the mirror 69 is set so that the reflected light from the target area reflected by the mirror 69 is sufficiently larger than the width of the laser holder 23. Therefore, the reflected light reflected by the mirror 69 passes around the laser holder 23 and enters the light receiving lens 32.
- the behavior of the reflected light is the same regardless of the rotation position of the mirror 69. That is, regardless of the rotational position of the mirror 69, the reflected light from the target area travels back in the optical path of the emitted laser light, travels parallel to the optical axis of the beam shaping lens 22, and reaches the light receiving lens 32. Incident. The incident state of the reflected light from the target area will be described later with reference to FIG.
- the light receiving unit 30 includes a band pass filter 31, a light receiving lens 32, and a photodetector 33.
- the band pass filter 31 is composed of a dielectric multilayer film and transmits only light in the wavelength band of the emitted laser light.
- the band-pass filter 31 has a simple film configuration because the reflected light is incident in a substantially parallel light state.
- the light receiving lens 32 is a Fresnel lens and collects light reflected from the target area.
- the Fresnel lens is a lens in which a convex lens is divided into concentric regions to reduce the thickness. In the present embodiment, it is necessary to increase the diameter of the light receiving lens 32 in order to increase the amount of light reflected from the target area. If a convex lens is used as the light receiving lens 32, the thickness increases. Therefore, it is desirable to use a Fresnel lens as the light receiving lens 32 as in the present embodiment.
- the photodetector 33 is made of an APD (avalanche photodiode) or a PIN photodiode, and is mounted on the circuit board 33a.
- the photodetector 33 outputs an electrical signal having a magnitude corresponding to the amount of received light to the circuit board 33a.
- the light receiving surface of the photodetector 33 is not divided into a plurality of regions, but is formed of a single light receiving surface. Further, the light receiving surface of the photodetector 33 is configured to have a narrow vertical and horizontal width (for example, around 1 mm) in order to suppress the influence of stray light.
- the lens barrel 40 has an opening 40a and an opening 40c having different inner diameters.
- the opening 40a has a larger diameter than the opening 40c and the light receiving lens 32, and the band pass filter 31 and the light receiving lens 32 are attached to the step between the opening 40a and the opening 40c.
- two grooves 40b arranged in the X-axis direction are formed in the opening 40a.
- the two grooves 40b engage with the projecting portion 23a of the laser holder 23, and hold the laser holder 23 in an inclined state in the in-plane direction of the YZ plane.
- parts other than the laser holder 23 and the two protrusion parts 23a become large gaps among the opening 40a of the lens barrel 40.
- the reflected light of the target area is guided to the light receiving lens 32 through this gap.
- the laser holder 23 has a smaller diameter than the opening 40a and the light receiving lens 32, and the protrusion 23a is thin in the Z-axis direction. Therefore, the amount of light that is reflected from the target area by the laser holder 23 is small.
- the upper portion of the lens barrel 40 is slanted along the emission direction of the emitted laser light when the mirror 69 is in the neutral position so that the reflected light from the target region and the emitted laser light are not shielded.
- An inclined portion 40d that is inclined in the direction is formed.
- a circuit board 33a on which the photodetector 33 is mounted is mounted on the lower part of the lens barrel 40, and the photodetector 33 is positioned in the opening 40c.
- the laser radar 1 has a laser light source 21, a bandpass filter 31, a light receiving lens 32, and a photodetector 33 arranged in a straight line.
- the laser light source 21, the beam shaping lens 22, and the light receiving lens 32 are arranged so that their optical axes coincide with each other.
- the band pass filter 31 and the photodetector 33 are arranged so that these optical axes pass through the center of the band pass filter 31 and the center of the light receiving surface of the photodetector 33.
- the projection / light receiving window 50 is made of a curved transparent plate having a curved surface.
- the projection / light receiving window 50 is made of a highly transparent material, and has an antireflection film (AR coating) on the incident surface and the output surface.
- AR coating antireflection film
- the laser light emitted from the laser light source 21 is converged by the beam shaping lens 22 and shaped into a predetermined shape in the target area.
- the laser light transmitted through the beam shaping lens 22 enters the mirror 69 of the mirror actuator 25 and is reflected by the mirror 69 toward the target area.
- the emitted laser light is scanned in the target area.
- the laser beam is scanned along a plurality of scanning lines parallel to the XZ plane in the target area.
- the mirror 69 is driven not only in the Pan direction but also in the Tilt direction.
- the mirror 69 is driven in the tilt direction.
- the swing angle in the scanning direction parallel to the XZ plane of the laser light in the target area (hereinafter referred to as “horizontal direction”) is large, and is perpendicular to the XZ plane of the laser light in the target area.
- the swing angle in a simple scanning direction (hereinafter referred to as “vertical direction”) is smaller than the swing angle in the horizontal direction.
- the circuit board 100 includes a circuit board 21 a for the laser light source 21 (see FIG. 7A), a circuit board 33 a for the photodetector 33, and a suspension wire fixing board for the mirror actuator 25. 75 is electrically connected.
- the circuit board 100 includes a CPU, a memory, and the like, and controls the laser light source 21 and the mirror actuator 25. Further, the circuit board 100 measures the presence / absence of an obstacle in the target region and the distance to the obstacle based on the signal from the photodetector 33. Specifically, laser light is emitted from the laser light source 21 at a predetermined scanning position in the target area.
- the reflected light from the target area enters the housing 10 and is reflected toward the photodetector 33 by the mirror 69 of the mirror actuator 25.
- a signal is output from the photodetector 33 at this time, it is detected that an obstacle exists at this scanning position. Further, the distance to the obstacle is measured from the time difference between the timing at which the laser beam is emitted at the scanning position and the timing at which the signal is output from the photodetector 33.
- FIG. 8A is a diagram illustrating a servo optical system for detecting the position of the mirror 69. This figure is a schematic diagram of the optical system of FIG. In the figure, only a partial sectional view of the mirror actuator 25 and the laser light source 21 are shown.
- the mirror actuator 25 is provided with the LED 68, the pinhole mounting bracket 82, the pinhole plate 83, the PSD substrate 84, and the PSD 85.
- the LED 68, PSD 85, and pin hole 83a are disposed so that the LED 68 faces the pin hole 83a of the pin hole plate 83 and the center of the PSD 85 when the mirror 69 of the mirror actuator 25 is in the neutral position. That is, when the mirror 69 is in the neutral position, the pinhole plate 83 and the PSD85 are arranged so that the servo light emitted from the LED 68 and passing through the pinhole 83a is perpendicularly incident on the center of the PSD85. Further, the pinhole plate 83 is disposed at a position closer to the PSD 85 than an intermediate position between the LED 68 and the PSD 85.
- a part of the servo light emitted so as to diffuse from the LED 68 passes through the pinhole 83a and is received by the PSD 85.
- Servo light that has entered the region other than the pinhole 83 a is shielded by the pinhole plate 83.
- the PSD 85 outputs a current signal corresponding to the light receiving position of the servo light.
- the optical path of the light passing through the pinhole 83a out of the diffused light (servo light) of the LED 68 is from LP1 to LP2. And displace.
- the irradiation position of the servo light on the PSD 85 changes, and the position detection signal output from the PSD 85 changes.
- the light emission position of the servo light from the LED 68 and the servo light incident position on the light receiving surface of the PSD 85 have a one-to-one correspondence. Accordingly, the position of the mirror 69 can be detected based on the incident position of the servo light detected by the PSD 85, and as a result, the scanning position of the scanning laser light in the target area can be detected.
- FIG. 9 is a diagram for explaining the relationship between the rotational position of the mirror 69, the optical path of the emitted laser light and the reflected light, and the positional relationship between the laser light source 21 and the photodetector 33.
- FIG. 6A schematically shows the optical paths of the outgoing laser light and the reflected light
- FIG. 6B schematically shows the relationship between the incident part of the reflected light from the target area and the light shielding part with respect to the light receiving lens 32.
- FIG. 6A schematically shows the optical paths of the outgoing laser light and the reflected light
- FIG. 6B schematically shows the relationship between the incident part of the reflected light from the target area and the light shielding part with respect to the light receiving lens 32.
- the emitted laser light emitted from the laser light source 21 is irradiated to the target region from the projection / light receiving window 50 through the beam shaping lens 22 and the mirror 69.
- the mirror 69 rotates from the position of the broken line as shown by the arrow, the optical path of the outgoing laser light changes from the dotted line to the solid line in the figure, and the traveling direction of the outgoing laser light changes. Thereby, the emitted laser beam is scanned in the target area.
- the reflected light from the target area passes through the projection / light receiving window 50 and is reflected toward the photodetector 33 by the mirror 69. Since the distance between the mirror 69 and the target area is sufficiently larger than the distance between the laser light source 21 and the mirror 69, the reflected light from the target area enters the mirror 69 in a substantially parallel light state. At this time, the mirror surface of the mirror 69 is several steps wider than the incident region of the outgoing laser light incident on the mirror surface from the beam shaping lens 22. For this reason, the incident area where the reflected light from the target area is incident on the mirror surface of the mirror 69 is several steps wider than the incident area of the emitted laser light on the mirror surface of the mirror 69. Of the reflected light from the target area, the amount of reflected light collected on the photodetector 33 depends on the size of the mirror surface of the mirror 69.
- the outer diameter of the laser holder 23 is considerably smaller than the diameters of the opening 40a of the lens barrel 40 and the light receiving lens 32, and the laser holder 23 protrudes in a thin shape in the Z-axis direction. Since it is held by the lens barrel 40 only by the portion 23a, the region (dark shaded portion in the figure) where the reflected light from the target region is shielded by the laser holder 23 is small. Therefore, most of the reflected light from the target region is incident on the band pass filter 31 and the light receiving lens 32 through the opening 40 a of the lens barrel 40 and the gap between the laser holder 23. Therefore, even if the laser light source 21 is arranged in the optical path between the mirror actuator 25 and the light receiving lens 32 as in the present embodiment, the reflected light from the target area can be received appropriately.
- the optical path of the reflected light from the target area in accordance with the change in the traveling direction of the emitted laser light is It changes like a solid line from the dotted line inside.
- the reflected light from the target area is reflected by the mirror 69 in the same direction as before the rotation of the mirror 69. That is, the reflected light travels backward along the optical path of the emitted laser light from the beam shaping lens 22 toward the mirror 69. Therefore, even if the mirror 69 rotates, the incident position of the reflected light with respect to the photodetector 33 does not change.
- the laser light source 21 is disposed in the optical path between the mirror actuator 25 and the photodetector 33, and the photodetector 33 is disposed behind the laser light source 21, the emitted laser light is directly reflected.
- the light is diffracted by the emission port of the laser light source 21 and other optical elements and is not easily incident on the photodetector 33. Therefore, even if the laser light source 21 and the light detector 33 are in the same housing, the influence on the light detector 33 by laser light (stray light) other than that reflected from the target region can be suppressed.
- FIG. 10 is a diagram for explaining the incident and light shielding conditions of reflected light depending on the shape and arrangement of the laser holder 23.
- the projection / light receiving window 50 of the housing 10, the mirror 69 of the mirror actuator 25, and the laser holder 23 of the laser unit 20 are shown in FIG.
- the portion indicates the reflected light from the target region, and the dark shaded portion indicates the region where the reflected light is shielded by the laser holder 23.
- FIG. 4A is a schematic diagram showing an incident state of reflected light when the laser beam scans the target area in the horizontal direction in the present embodiment.
- the swing angle of the laser beam in the horizontal direction (X-axis direction) is large, and the laser holder 23 is disposed so as to be inclined in the in-plane direction of the YZ plane (see FIG. 9A). ).
- the protrusion 23a of the laser holder 23 is formed so as to protrude in the X-axis direction. For this reason, as shown in FIG. 9A, even if the laser light is greatly shaken in the horizontal direction (X-axis direction), the reflected light from the target region is not easily shielded by the protrusion 23 a of the laser holder 23.
- (B) of the figure is a schematic diagram showing a comparative example in which, for example, the protruding portion 23a of the laser holder 23 is formed so as to protrude in the Y-axis direction.
- the protrusion 23a of the laser holder 23 extends so as to be perpendicular to the horizontal scanning direction (X-axis direction) of the laser light.
- the reflected light from the target region is likely to be applied to the protrusion 23 a of the laser holder 23.
- the area shielded by the protrusion 23a is relatively large. In this case, the light shielding region becomes larger as the swing angle in the horizontal direction (X-axis direction) of the laser light becomes larger.
- the light-shielding region tends to be large in the range where the swing angle is large.
- the laser beam is scanned in the horizontal direction while being tilted downward (Y-axis negative direction) from the state parallel to the XZ plane in FIG. 9A, the laser beam is further applied to the protrusion 23a. It becomes easy to be hooked and is easily shielded from light by the protrusion 23a.
- the reflected light from the target area is easily shielded, and the shielded area is large. For this reason, the amount of light incident on the photodetector 33 is reduced, which may adversely affect the accuracy of distance measurement.
- the protruding portion 23a of the laser holder 23 is formed so as to extend in the horizontal direction where the swing angle of the laser beam in the target region is large as in the present embodiment.
- FIG. 5C is a schematic diagram showing the incident state of reflected light when the mirror 69 in the present embodiment is rotated from the neutral position in the vertical direction (Tilt direction) and downward (hereinafter referred to as “vertical downward direction”).
- FIG. 5C is a schematic diagram showing the incident state of reflected light when the mirror 69 in the present embodiment is rotated from the neutral position in the vertical direction (Tilt direction) and downward (hereinafter referred to as “vertical downward direction”).
- the protruding portion 23a of the laser holder 23 has a triangular blade shape, and a portion near the mirror 69 is narrower than a portion far from the mirror 69. Therefore, when the mirror 69 is rotated vertically downward, the area of the reflected light shielded by the laser holder 23 is small.
- FIG. 4D is a schematic diagram showing a comparative example in the case where the protruding portion 23a of the laser holder 23 is formed in a rectangular blade shape or the like, for example.
- the protruding portion 23a of the laser holder 23 is formed such that the portion close to the mirror 69 is smaller in width than the portion far from the mirror 69, as in the present embodiment.
- the area where the reflected light from the target area is shielded can be reduced. Therefore, even when the laser holder 23 is arranged close to the mirror 69, the reflected light from the target area can be properly received.
- FIG. 11 is a diagram showing a circuit configuration of the laser radar 1.
- the laser radar 1 includes a PSD signal processing circuit 101, a servo LED driving circuit 102, an actuator driving circuit 103, a scan LD driving circuit 104, a PD signal processing circuit 105, and a DSP.
- the PSD signal processing circuit 101 outputs a position detection signal obtained based on the output signal from the PSD 85 to the DSP 106.
- the servo LED drive circuit 102 supplies a drive signal to the LED 68 based on the signal from the DSP 106.
- the actuator drive circuit 103 drives the mirror actuator 25 based on a signal from the DSP 106. Specifically, a drive signal for scanning the laser beam along a predetermined trajectory in the target area is supplied to the mirror actuator 25.
- the scan LD drive circuit 104 supplies a drive signal to the laser light source 21 based on a signal from the DSP 106. Specifically, a pulsed drive signal (current signal) is supplied to the laser light source 21 at the timing of irradiating the target region with the laser light.
- the PD signal processing circuit 105 amplifies and digitizes a voltage signal corresponding to the amount of light received by the photodetector 33 and supplies the amplified signal to the DSP 106.
- the DSP 106 detects the scanning position of the laser beam in the target area based on the position detection signal input from the PSD signal processing circuit 101, and executes drive control of the mirror actuator 25, drive control of the laser light source 21, and the like. . Further, the DSP 106 determines whether there is an obstacle at the laser light irradiation position in the target area based on the voltage signal input from the PD signal processing circuit 105, and at the same time, the laser light output from the laser light source 21. The distance to the obstacle is measured on the basis of the time difference between the irradiation timing and the light reception timing of the reflected light from the target area received by the photodetector 33.
- the mirror actuator 25 for scanning the laser light is also used for the light receiving system, so that the incident position of the reflected light with respect to the photodetector 33 even when the mirror 69 is rotated. Can be made constant. Therefore, the reflected light can be properly received by the photodetector 33 having a small single light receiving surface.
- the laser light source 21 is arranged in the optical path between the mirror actuator 25 and the photodetector 33, and the photodetector 33 is located behind the laser light source 21,
- the emitted laser light is difficult to enter the photodetector 33 because it is diffracted directly or by the exit of the laser light source 21 or another optical element. Therefore, even if the laser light source 21 and the light detector 33 are in the same housing, the influence on the light detector 33 by laser light (stray light) other than that reflected from the target region can be suppressed.
- the horizontal direction (X-axis direction) can be increased, the horizontal scanning range in the target area can be increased, and the reflected light from the target area is not easily shielded by the laser holder 23.
- the diameter of the laser holder 23 is smaller than the diameter of the light receiving lens 32, and the laser holder 23 is held by the lens barrel 40 only by the thin-shaped protrusion 23a.
- the amount of light that is reflected by the laser holder 23 from the target area is small. Therefore, even if the laser light source 21 is arranged in the optical path between the mirror actuator 25 and the light receiving lens 32, the reflected light from the target area can be properly received.
- the protruding portion 23a of the laser holder 23 is formed so as to protrude in the horizontal direction (X-axis direction) where the swing angle of the laser light is large, the laser light is in the horizontal direction. Even if it is greatly shaken, the amount of light that is reflected by the laser holder 23 from the target area is small. Therefore, the reflected light from the target area can be received more appropriately.
- the protrusion 23a of the laser holder 23 is formed so that the portion near the mirror 69 is smaller in width than the portion far from the mirror 69, so that the mirror 69 is vertically downward.
- the area where the reflected light from the target area is blocked can be reduced. Therefore, even in the configuration in which the laser holder 23 is arranged close to the mirror 69, the reflected light from the target area can be received appropriately. Therefore, the laser radar 1 can be downsized.
- the laser light source 21 in order to increase the horizontal swing angle of the laser light, is arranged so that the laser light is incident on the mirror 69 from below as shown in FIGS.
- the laser light source 21 is installed so that the laser beam is incident on the mirror 69 from the side when the vertical swing angle of the laser beam is increased or when the height of the housing 10 is desired to be lowered. Also good.
- FIG. 12 is a diagram showing the configuration of the laser radar 1 in this case.
- the configuration other than the laser beam emission direction is the same as that in the above embodiment, and the same reference numerals are given.
- FIG. 2A is a view seen through the inside of the laser radar 1 from the upper surface side
- FIG. 2B is a view of the laser radar 1 as seen from the front.
- the laser light source 21 is installed so as to emit laser light in the negative X-axis direction. Further, the mirror actuator 25 is installed so that the mirror surface of the mirror 69 is perpendicular to the XZ plane and the optical axis of the laser light source 21 is 45 degrees with respect to the mirror surface of the mirror 69 at the neutral position.
- the protrusion 23a of the laser holder 23 is formed to extend in the Z-axis direction. If it carries out like this, similarly to the said embodiment, when a laser beam is scanned to a horizontal direction, the reflected light from a target area
- the protrusion part 23a of the laser holder 23 was formed in the shape of a triangular blade
- the material of the protruding portion 23a may be formed of a material that can transmit light. Thereby, it is possible to further prevent the reflected light from the target area from being blocked.
- the number of protrusions 23a is not limited to two, and may be one or three or more. However, as the number of the protrusions 23a increases, the amount of light shielded by the protrusions 23a increases. Therefore, the number of protrusions 23a is preferably as small as possible.
- the laser holder may be held by a light transmission plate that extends in a direction perpendicular to the optical axis of the beam shaping lens 22 without providing the protrusion 23a.
- FIG. 13 is a diagram showing the configuration of the laser radar 1 in this case.
- FIG. 13 schematically shows the inside of the laser radar 1 with the cover of the housing 10 removed, and the mirror actuator 25 is shown in a simplified manner.
- the laser radar 1 includes a laser unit 24 instead of the laser unit 20 of the above embodiment. Further, the laser radar 1 includes a lens barrel 41 instead of the lens barrel 40 of the above embodiment.
- the mirror actuator 25 and the light receiving unit 30 are configured in the same manner as in the above embodiment, and thus detailed description thereof is omitted.
- FIG. 14A and 14B are cross-sectional views schematically showing a cross section of a plane perpendicular to the base 10b of the housing 10 of the laser unit 24.
- FIG. 14A shows the laser unit 24 in a state where each member is disassembled
- FIG. 14B shows the laser unit 24 in a state where each member is assembled.
- the laser unit 24 includes a laser holder 241, a retaining screw 242, a light transmission plate 243, and a lens holder 244.
- the laser holder 241 is made of metal such as aluminum.
- the laser holder 241 has a substantially cylindrical shape with different outer diameters at the front and rear.
- a large-diameter portion 241a is formed in the front, and a small-diameter portion 241b having a smaller diameter than the large-diameter portion 241a is formed in the rear.
- a screw groove 241c is provided in a part of the rear of the small diameter portion 241b.
- the outer periphery of the large-diameter portion 241a is knurled to prevent slipping when screwed onto the retaining screw 242 (see FIG. 13).
- the laser holder 241 has a circular opening 241d for accommodating the lens holder 244 and a circular opening 241e for accommodating the laser light source 21 therein.
- the diameter of the opening 241 d is slightly larger than the outer diameter of the small diameter portion 244 b of the lens holder 244, and the diameter of the opening 241 e is slightly larger than the diameter of the base 211 of the laser light source 21.
- a ring-shaped step 241f having a smaller diameter than the openings 241d and 241e is formed, and a circular hole is formed inside the step 241f.
- the diameter of the hole inside the stepped portion 241f is slightly larger than the diameter of the CAN 212 of the laser light source 21.
- the laser light source 21 is fitted into the opening 241e from the rear until the front surface of the base 21a of the laser light source 21 contacts the step 241f of the laser holder 241. Thereby, the laser light source 21 is positioned with respect to the laser holder 241, and the laser light source 21 is bonded and fixed to the laser holder 241.
- the retaining screw 242 is formed of a metal such as aluminum, like the laser holder 241.
- the retaining screw 242 has a substantially cylindrical shape in which an opening 242a for accommodating the laser holder 241 is formed.
- the diameter of the opening 242a is slightly larger than the small diameter portion 241b of the laser holder 241.
- a screw groove 242b that meshes with the screw groove 241c of the laser holder 241 is provided in the opening 242a.
- the outer periphery of the retaining screw 242 is knurled to prevent slipping when screwed to the laser holder 241 (see FIG. 13).
- the light transmission plate 243 is made of glass that can transmit light.
- An antireflection film is attached to the incident surface and the exit surface of the light transmission plate 243 in order to increase the transmittance of the reflected light from the target region.
- the light transmission plate 243 has a substantially semicircular shape having a cut part 243a whose upper part is cut linearly when viewed from the front (see FIG. 13).
- the light transmission plate 243 is slightly thick in the front-rear direction in order to stably hold the laser holder 241.
- the light transmission plate 243 guides the reflected light from the target area to the light receiving lens 32 (see FIG. 13), even after the reflected light is refracted by the light transmission plate 243, the reflected light is reflected on the entire lens surface of the light receiving lens 32.
- the diameter of the light is incident.
- a circular opening 243b for passing the laser holder 241 is formed in the center of the light transmission plate 243.
- the diameter of the opening 243 b is smaller than the large diameter portion 241 a of the laser holder 241 and slightly larger than the small diameter portion 241 b of the laser holder 241.
- the lens holder 244 is formed of a metal such as aluminum, like the laser holder 241.
- the lens holder 244 has a substantially cylindrical shape with different outer diameters at the front and rear.
- a large diameter portion 244a is formed in the front, and a small diameter portion 244b having a smaller diameter than the large diameter portion 244a is formed in the rear.
- the lens holder 244 accommodates the beam shaping lens 22 therein, and has a circular opening 244 c for guiding the laser light emitted from the laser light source 21 to the beam shaping lens 22.
- the diameter in front of the opening 244c is slightly larger than the diameter of the beam shaping lens 22.
- a step 244d is formed in the opening 244c, and the diameter of the opening 244c in the portion of the step 244d is smaller than the diameter in front of the opening 244c.
- the beam shaping lens 22 is fitted into the opening 244c from the front until the peripheral portion of the rear surface of the beam shaping lens 22 contacts the step 244d of the lens holder 244. In this state, the beam shaping lens 22 is bonded and fixed to the lens holder 244.
- the small diameter portion 241b of the laser holder 241 is passed through the opening 243b of the light transmission plate 243 from the front. Thereafter, the retaining screw 242 is screwed into the screw groove 241 c of the laser holder 241 from the rear so as to sandwich the light transmission plate 243. Thereby, the light transmission plate 243 is sandwiched between the step between the large diameter portion 241 a and the small diameter portion 241 b of the laser holder 241 and the front surface of the retaining screw 242.
- the small diameter portion 244b of the lens holder 244 is passed through the opening 241d of the laser holder 241.
- laser light is emitted from the laser light source 21, and the lens holder 244 is adjusted in the front-rear direction so that the laser light is focused at a predetermined distance.
- the focus of the beam shaping lens 22 is adjusted.
- the lens holder 244 is bonded and fixed to the laser holder 241.
- FIG. 15A is an exploded perspective view of the lens barrel 41 and the laser holder holding portion 42
- FIG. 15B is a perspective view of the laser holder holding portion 42 viewed from the rear
- FIG. 15C is a lens barrel.
- 4 is a perspective view showing a state in which a laser holder holding portion is assembled to 41.
- the lens barrel 41 is formed of a resin material or the like that does not transmit light.
- the lens barrel 41 includes an inclined portion 41a that is inclined along the emission direction of the emitted laser light when the mirror 69 is in the neutral position so that the reflected light from the target region and the emitted laser light are not shielded. Is formed.
- the lens barrel 41 is formed with an opening 41b for guiding reflected light to the photodetector 33 (see FIG. 13) mounted on the back.
- a step is provided in the opening 41b, and the light receiving lens 32 is attached to the opening 41b so as to contact the step (see FIG. 13).
- the lens barrel 41 is provided with screw holes 41c to 41e for fixing the laser holder holding portion.
- the laser holder holding portion 42 is formed of a resin material or the like that does not transmit light, like the lens barrel 41.
- the laser holder holding part 42 has a substantially semi-shaped opening 42a at the center in front view.
- the diameter of the opening 42 a is slightly larger than the diameter of the light transmission plate 243 of the laser unit 24.
- a step portion 42b is formed behind the opening 42a.
- notches 42c are formed at the left and right upper ends of the opening 42a.
- a groove 42d extending from the front direction to the rear direction is formed in the lower left corner of the laser holder holding portion 42, and a screw hole 42e is formed behind the groove 42d. Referring to FIG.
- a groove 42 f and a screw hole 42 g extending from the front direction to the rear direction are formed in the upper right corner of the laser holder holding portion 42.
- a groove 42h and a screw hole 42i extending from the front direction to the rear direction are formed.
- the back surface 42m of the laser holder holding portion 42 is pressed against the front surface 41f of the lens barrel 41 from the front, and the screw holes 42e of the laser holder holding portion 42 are screw holes 41c. Further, the screw hole 42g is aligned with the screw hole 41d, and the screw hole 42i is aligned with the screw hole 41e. In this state, the screws 42j, 42k, 42l are screwed into the screw holes 41c, 41d, 41e of the lens barrel 41 through the screw holes 42e, 42g, 42i. As a result, the laser holder holding portion 42 is fixed to the lens barrel 41.
- the laser unit 24 is passed from the front through the opening 42a of the laser holder holding portion 42, and pressed so that the light transmission plate 243 contacts the stepped portion 42b.
- an adhesive is introduced from the notch 42c, and the light transmission plate 243 is bonded and fixed to the laser holder holding portion 42.
- the structure shown in FIG. 15C is assembled.
- the screw 41 is attached to the holding frame 43 in which the lens barrel 41 is disposed on the base 10b so that the lens barrel 41 is inclined at a predetermined angle (for example, 60 degrees as in the above embodiment). It is fixed by.
- the laser unit 24 emits laser light to the mirror actuator 25 with a predetermined inclination, and guides reflected light from the target area to the light receiving lens 32 and the photodetector 33 via the light transmission plate 243. it can.
- FIG. 16A is a schematic view of the lens barrel 41 and the laser holder holding portion 42 as viewed from the front.
- FIG. 16B is a diagram schematically showing the relationship between the incident part of the reflected light from the target region and the light shielding part with respect to the light receiving lens 32.
- the diameter R1 of the laser holder 241 is considerably smaller than the diameter R2 of the light transmission plate 243. Further, the diameter R2 of the light transmission plate 243 is slightly larger than the diameter R3 of the light receiving lens 32.
- the light transmission plate 243 is provided with a cut portion 243a. Therefore, as shown in FIG. 16B, in the region above the cut portion 243a, the reflected light from the target region is not blocked, passes through the opening 41b, and is above the lens surface of the light receiving lens 32. Incident.
- the reflected light from the target region is shielded only by the laser holder 241 and the laser holder holding portion 42, and the reflected light incident on the other region is transmitted through the light transmission plate 243. Then, the light is incident on the lower part of the lens surface of the light receiving lens 32. Thus, the reflected light incident on the upper and lower portions of the light receiving lens 32 is converged on the photodetector 33 by the light receiving lens 32.
- the laser holder 241 is held by the light transmission plate 243, the area where the reflected light from the target area is shielded can be made smaller than in the above embodiment. it can.
- the laser holder 241 is attached to the opening 42 a of the laser holder holding portion 42 via a light transmission plate 243 extending in a direction perpendicular to the optical axis of the beam shaping lens 22. Therefore, as shown in FIG. 7, the laser holder 241 is compared with the case where the laser holder 23 is held in the groove 40 b by a thin plate-like protrusion 23 a extending in a direction horizontal to the optical axis of the beam shaping lens 22.
- the lens barrel 41 is stably held.
- the laser holder 241 is held by a simple substantially semicircular light transmitting plate 243, the laser radar 1 can be easily manufactured as compared with the blade-like protrusion 23a of the above embodiment. can do.
- the laser holder holding portion 42 is formed of a member separate from the lens barrel 41, but a holding portion that protrudes in the forward direction is integrally formed on the front surface 41f of the lens barrel 41.
- the laser unit 24 may be accommodated in the holding unit.
- the light transmission plate 243 is provided with the cut portion 243a so as to have a substantially semicircular shape so as not to disturb the emitted laser beam.
- the cut portion 243a is not provided, and the substantially transparent shape is obtained. You may form so that it may become a shape.
- the number of light transmission plates 243 is not limited to one, and a plurality of light transmission plates 243 may be provided so as to be divided in the circumferential direction.
- the light transmission plate 243 is made of glass, but may be other materials such as resin as long as light can be transmitted.
- the laser holder 23 may be formed of a material having excellent light transmittance. In this case, however, it is desirable to shield the inside of the laser holder 23 with a paint or the like. This is because, for example, stray light emitted from the laser light source 21 (laser light is also emitted from the opposite side of the laser chip, so unnecessary laser light is output as stray light in addition to the main laser light output from the front of the laser chip. Or the laser beam emitted from the laser light source 21 is reflected by the surface of the beam shaping lens 22, which passes through the laser holder 23. This is to prevent erroneous detection.
- the thickness of the laser holder 23 may be increased so that the outer diameter of the laser holder 23 is slightly smaller than the inner diameter of the opening 40a of the lens barrel 40, and the protruding portion 23a may be omitted.
- the laser light source 21 and the beam shaping lens 22 are attached to the lens barrel 40 by fitting the laser holder 23 into the opening 40a. The reflected light from the target area passes through the thick part of the laser holder 23 and is guided to the light receiving lens 32.
- the laser radar 1 is configured such that the swing angle of the horizontal laser beam is larger than the swing angle of the vertical laser beam.
- the swing angle of the vertical laser beam is horizontal.
- the laser radar 1 may be configured to be larger than the swing angle of the laser beam.
- the laser unit 20 and the light receiving unit 30 are integrally held by the lens barrel 40.
- the laser holder 23 is attached to the opening 40a of the lens barrel 40 by the protrusion 23a.
- the laser holder 23 and the protrusion 23a are formed of a transparent material so as to reduce light shielding. Is desirable. However, as described above, it is desirable to shield the inside of the laser holder 23 with paint or the like.
- a Fresnel lens is used as the light receiving lens 32, but a convex lens or the like may be used.
- the configuration example of the mirror actuator in which the mirror rotates around the two axes has been shown.
- the present invention is also applicable to a mirror actuator having a configuration other than the above and an actuator using a polygon mirror. Is possible.
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optics & Photonics (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
【課題】投射光学系と受光光学系が同一筺体内にあっても、目標領域からの反射光を適正に受光することができるレーザレーダを提供する。 【解決手段】レーザレーダ1は、レーザ光源21と、ミラー69を駆動するミラーアクチュエータ25と、ミラー69によって反射されたレーザ光の反射光を集光する受光レンズ32と、受光レンズ32により集光された反射光を受光する光検出器33と、を備える。レーザ光源21は、ミラー69と受光レンズ32との間の光路中に配され、ミラー69は、反射光がレーザ光源21の周りを通り抜けて受光レンズ32に入射する大きさを有する。光検出器33が、レーザ光源21の背後に位置するため、目標領域から反射された以外のレーザ光が、光検出器33に入射しにくく、反射光を適正に受光することができる。
Description
本発明は、目標領域にレーザ光を照射したときの反射光をもとに目標領域の状況を検出するレーザレーダに関するものである。
近年、建物への侵入検知等のセキュリティ用途として、レーザレーダが用いられている。一般に、レーダレーダは、レーザ光を目標領域内でスキャンさせ、各スキャン位置における反射光の有無から、各スキャン位置における障害物の有無を検出する。さらに、各スキャン位置におけるレーザ光の照射タイミングから反射光の受光タイミングまでの所要時間をもとに、各スキャン位置における障害物までの距離が検出される。
レーザレーダの構成として、たとえば、レーザ光を照射する投射光学系と目標領域からの反射光を受光する受光光学系を同一筺体内に配置する構成を用いることができる(特許文献1)。目標領域からの反射光は、受光光学系に配置された光検出器によって受光される。光検出器からは、受光光量に応じた大きさの信号が出力される。この信号が所定の閾値を超えると、当該スキャン位置に障害物が存在すると判定される。また、この信号が前記閾値を超えたタイミングが反射光の受光タイミングとされて、上記のように、当該スキャン位置における障害物までの距離が計測される。
上記構成において、レーザ光は、遠距離の障害物を検出するために、非常に大きい発光強度に設定される。しかし、この場合、レーザ光の一部が、筐体内の光学素子等により反射または回折され、迷光となって光検出器に入射する惧れがある。
このように、光検出器に迷光が入射すると光検出器からの出力信号が誤差を含むこととなり、障害物までの距離の測定精度が低下することとなってしまう。特に、障害物が近距離にある場合、レーザ光の照射タイミングと反射光の受光タイミングの時間差が短くなるため、反射光による光検出器の出力信号と迷光による光検出器の出力信号とが互いに重なり易い。このため、特に障害物が近距離にある場合には、筺体内で反射または回折された迷光によって、障害物の測定精度に劣化が生じ易くなる。
本発明は、かかる課題に鑑みて為されたものであり、投射光学系と受光光学系が同一筺体内にあっても、目標領域からの反射光を適正に受光することができるレーザレーダを提供することを目的とする。
本発明の主たる局面に係るレーザレーダは、レーザ光を出射するレーザ光源と、前記レーザ光を目標領域に向かって反射するミラーと、前記レーザ光が前記目標領域を走査するように前記ミラーを駆動する駆動部と、前記目標領域において反射され、さらに、前記ミラーによって反射された前記レーザ光の反射光を集光する集光素子と、前記集光素子により集光された前記反射光を受光する光検出器と、を備える。前記レーザ光源は、前記ミラーと前記集光素子との間の光路中に配され、前記ミラーは、前記反射光が前記レーザ光源の周りを通り抜けて前記集光素子に入射する大きさを有する。
本発明によれば、投射光学系と受光光学系が同一筺体内にあっても、目標領域からの反射光を適正に受光することができるレーザレーダを提供することができる。
本発明の効果ないし意義は、以下に示す実施の形態の説明により更に明らかとなろう。ただし、以下に示す実施の形態は、あくまでも、本発明を実施化する際の一つの例示であって、本発明は、以下の実施の形態に記載されたものに何ら制限されるものではない。
以下、本発明の実施の形態について、図面を参照して説明する。
図1は、本実施の形態に係るレーザレーダに搭載されるミラーアクチュエータ25の分解斜視図を示す図である。
ミラーアクチュエータ25は、ミラーユニット60と、マグネットユニット70と、サーボユニット80を備えている。
図2(a)を参照して、ミラーユニット60は、ミラーユニットフレーム61と、パンコイル装着板62、63と、サスペンションワイヤー固定基板64a、64b、65と、サスペンションワイヤー66a~66dと、支軸67と、LED68と、ミラー69とを備えている。
ミラーユニットフレーム61は、正面視において長方形の輪郭の枠部材からなっている。ミラーユニットフレーム61には、左右の側面にそれぞれ2つのチルトコイル装着部61aが設けられている。各側面のチルトコイル装着部61aは、各側面の中心から上下方向に対称な位置に配置されている。これら4つのチルトコイル装着部61aには、それぞれ、チルトコイル61bが巻回され固着される。
また、ミラーユニットフレーム61には、左右に並ぶ軸孔61cと、上下に並ぶ溝61eが形成されている。軸孔61cは、左右の側面の中心位置に配置され、溝61eは上下の側面の中心位置まで延びている。軸孔61cには、それぞれ、左右から軸受け61dが取り付けられる。
ミラーユニットフレーム61の底面は、櫛歯状となっており、サスペンションワイヤー66a、66bを通すための2つのワイヤー孔61fと、サスペンションワイヤー66c、66dを通すための2つのワイヤー孔61gと、後述するサスペンションワイヤー76a~76cを通すための3つのワイヤー孔61hと、サスペンションワイヤー76d~76fを通すための3つのワイヤー孔61iが形成されている。なお、ワイヤー孔61h、61iは、サスペンションワイヤー76a~76fを斜め後方向に傾けて固定するために、サスペンションワイヤー76a~76fの径よりもやや大きく形成されている。これにより、サスペンションワイヤー76a~76fを、ミラー69から離れる方向に曲線状に張ることができる。
パンコイル装着板62には、2つのパンコイル装着部62aと、サスペンションワイヤー66a、66bを通すための2つのワイヤー孔62cと、サスペンションワイヤー66c、66dを通すための2つのワイヤー孔62dと、支軸67を通すための軸孔62eが設けられている。ワイヤー孔62cは、ワイヤー孔61fと上下方向に直線状に並ぶように形成されており、ワイヤー孔62dは、ワイヤー孔61gと上下方向に直線状に並ぶように形成されている。2つのパンコイル装着部62aには、それぞれ、2つのパンコイル62bが巻回され固着される。また、パンコイル装着板63には、2つのパンコイル装着部63aと支軸67を通すための軸孔63cが設けられている。パンコイル装着部63aには、2つのパンコイル63bが巻回され固着される。
サスペンションワイヤー固定基板64a、64bには、それぞれ、サスペンションワイヤー66a、66bを通すための2つの端子穴64cと、サスペンションワイヤー66c、66dを通すための2つの端子穴64dが形成されている(図2(b)参照)。端子穴64c、64dの位置において、後述のように、パンコイル62b、63bと、LED68に電流を供給するための導線が、サスペンションワイヤー66a~66dに半田等で電気的に接続される。サスペンションワイヤー固定基板64a、64bは、2つの端子穴64c、64dとワイヤー孔62c、62dが整合するように、パンコイル装着板62に接着して固定される。
サスペンションワイヤー固定基板65には、サスペンションワイヤー66a、66bを通すための2つの端子穴65aと、サスペンションワイヤー66c、66dを通すための2つの端子穴65bと、サスペンションワイヤー76a~76cを通すための3つの端子穴65cと、サスペンションワイヤー76d~76f(図1参照)を通すため3つの端子穴65dが形成されている。なお、3つの端子穴65c、65dは、ワイヤー孔61h、61iと同様に、サスペンションワイヤー76a~76fを曲線状に張るために、サスペンションワイヤー76a~76fの径よりもやや大きく形成されている。
図2(c)を参照して、サスペンションワイヤー固定基板65には、2つの端子穴65aと3つの端子穴65cのうちの2つとを電気的に接続する回路パターンP1、P2が形成されている。また、サスペンションワイヤー固定基板65には、2つの端子穴65bと3つの端子穴65dのうちの2つとを電気的に接続する回路パターンP3、P4が形成されている。これらの端子穴と、各端子穴に通されたサスペンションワイヤー66a~66dおよびサスペンションワイヤー76a、76b、76d、76eとを半田付けすることにより、サスペンションワイヤー66a~66dと、サスペンションワイヤー76a、76b、76d、76eとが、上記回路パターンを介して、電気的に接続される。3つの端子穴65cの残り一つと、3つの端子穴65dの残り一つの位置において、後述のように、左右のチルトコイル61bと、サスペンションワイヤー76c、76fとが、半田等で電気的に接続される。
図2(a)に戻り、サスペンションワイヤー固定基板65は、端子穴65aとワイヤー孔61f、端子穴65bとワイヤー孔61g、端子穴65cとワイヤー孔61h、および、端子穴65dとワイヤー孔61iが、それぞれ互いに整合するように、ミラーユニットフレーム61に接着して固定される。
サスペンションワイヤー66a~66dは、りん青銅、ベリリウム銅等からなり、導電性に優れ、ばね性を有する。サスペンションワイヤー66a~66dは、断面が円形状となっている。サスペンションワイヤー66a~66dは、互いに同じ形状および特性を持ち、パンコイル62b、63bとLED68への電流供給と、ミラー69のPan方向の回動時において、安定した負荷を与えるために利用される。
支軸67には、LED基板固定アーム68bを挿入するための孔67aと、パンコイル63bとLED68を電気的に接続する導線を通すための孔67b、67cと、ミラー69を嵌め込むための段部67dが形成されている。また、支軸67内は、パンコイル63bとLED68を電気的に接続する導線を通すため、空洞となっている。なお、支軸67は、後述するように、ミラー69をPan方向に回動させる回転軸として利用される。
LED68は、拡散タイプ(広指向タイプ)であり、広い範囲に光を拡散させることができる。LED68からの拡散光は、後述するように、走査用のレーザ光の目標領域内での走査位置を検出するために利用される。LED68は、LED基板68aに取り付けられている。LED基板68aは、LED基板固定アーム68bに接着された後、支軸67の孔67aに取り付けられる。
ミラーユニット60の組立時には、支軸67にミラー69が嵌め込まれた後、支軸67の両端の軸に軸受け67e、ポリスライダーワッシャ67fが取り付けられる。そして、この状態で、2つの軸受け67eが、ミラーユニットフレーム61に形成された溝61eに嵌め込まれる。さらに、上下からパンコイル装着板62の軸孔62eとパンコイル装着板63の軸孔63cが、支軸67に通され、支軸67に接着固定される。
その後、サスペンションワイヤー66a、66bが、サスペンションワイヤー固定基板64aの2つの端子穴64cと、2つのワイヤー孔62cと、2つのワイヤー孔61fを介して、サスペンションワイヤー固定基板65の端子穴65aに通される。同様に、サスペンションワイヤー66c、66dが、サスペンションワイヤー固定基板64bの2つの端子穴64dと、2つのワイヤー孔62dと、2つのワイヤー孔61gを介して、サスペンションワイヤー固定基板65の端子穴65bに通される。サスペンションワイヤー66a~66dは、それぞれ、パンコイル62b、63bと、LED68に電流を供給するための導線とともにサスペンションワイヤー固定基板64a、64b、65に半田付けられる。
これにより、図1に示すように、ミラーユニット60の組立が完了する。この状態で、ミラー69は、支軸67の周りにPan方向に回動可能となる。なお、サスペンションワイヤー固定基板64a、64bは、ミラー69のPan方向の回動に伴って、Pan方向に回動する。組み立てられたミラーユニット60は、マグネットユニットフレーム71の開口に収容される。
図1に戻り、マグネットユニット70は、マグネットユニットフレーム71と、8つのパンマグネット72と、8つのチルトマグネット73と、2つの支軸74と、サスペンションワイヤー固定基板75と、サスペンションワイヤー76a~76fと、保護カバー77とを備えている。
マグネットユニットフレーム71は、正面視において長方形の輪郭の枠部材からなっている。マグネットユニットフレーム71の左右の側面の中央には、支軸74を通すための軸孔71aと、支軸74を固定するためのネジ穴71bが形成されている。マグネットユニットフレーム71の上面には、サスペンションワイヤー固定基板75を固定するための2つのネジ穴71cが形成されている。また、マグネットユニットフレーム71の上下の内側面の前端には、マグネットユニットフレーム71の内側に突出した4つの鍔部が形成され、これら4つの鍔部には、保護カバー77を固定するためのネジ穴71dが形成されている。さらに、マグネットユニットフレーム71の上下の内側面の後端には、マグネットユニットフレーム71の内側に突出した4つの鍔部が形成され、これら4つの鍔部には、サーボユニットフレーム81を固定するためのネジ穴71eが形成されている。8つのパンマグネット72は、マグネットユニットフレーム71の上下の内側面に取り付けられている。さらに、8つのチルトマグネット73は、マグネットユニットフレーム71の左右の内側面に取り付けられている。
2つの支軸74には、それぞれ、2つのネジ孔74bが形成されている。2つの支軸74は、ポリスライダーワッシャ74aが取り付けられた状態で、マグネットユニットフレーム71に形成された軸孔71aを介して、ミラーユニットフレーム61の軸受け61dに嵌め込まれる。この状態で、2つのネジ孔74bを介して2つのネジ74cがマグネットユニットフレーム71の2つのネジ穴71bに螺着される。これにより、2つの支軸74がマグネットユニットフレーム71に固着される。なお、支軸74は、後述するように、ミラー69をTilt方向に回動させる回転軸として利用される。
サスペンションワイヤー固定基板75には、2つのネジ孔75aと、サスペンションワイヤー76a~76fを通すための3つの端子穴75c、75dが形成されている。なお、3つの端子穴75c、75dは、サスペンションワイヤー76a~76fを曲線状に張るために、サスペンションワイヤー76a~76fの径よりもやや大きく形成されている。サスペンションワイヤー固定基板75には、端子穴75c、75dに信号を供給するための回路パターンが形成されている。
サスペンションワイヤー76a~76fは、りん青銅、ベリリウム銅等からなり、導電性に優れ、ばね性を有する。サスペンションワイヤー76a~76fは、断面が円形状となっている。サスペンションワイヤー76a~76fは、互いに同じ形状および特性を持ち、チルトコイル61bとパンコイル62b、63bとLED68への電流供給と、ミラー69のTilt方向の回動時において、安定した負荷を与えるために利用される。
マグネットユニット70の組立時には、サスペンションワイヤー固定基板75が、マグネットユニットフレーム71の上面に取り付けられる。この状態で、2つのネジ孔75aを介して、2つのネジ75bを2つのネジ穴71cに螺着する。これにより、サスペンションワイヤー固定基板75がマグネットユニットフレーム71に固着される。
その後、サスペンションワイヤー76a~76cが、サスペンションワイヤー固定基板75の3つの端子穴75cと、ミラーユニットフレーム61の3つのワイヤー孔61hを介して、サスペンションワイヤー固定基板65の端子穴65c(図2(a)参照)に通される。同様に、サスペンションワイヤー76d~76fが、サスペンションワイヤー固定基板75の3つの端子穴75dと、ミラーユニットフレーム61の3つのワイヤー孔61iを介して、サスペンションワイヤー固定基板65の3つの端子穴65d(図2(a)参照)に通される。
しかる後、サスペンションワイヤー76a~76fは、それぞれ、チルトコイル61bと、パンコイル62b、63bと、LED68に電流を供給するための導線とともに、サスペンションワイヤー固定基板65、75に半田付けられる。なお、サスペンションワイヤー76a~76fは、ミラー69から離れる方向に曲線状に張られる。すなわち、サスペンションワイヤー76a~76fの上端部は、端子穴75c、75dから離れるに従って後ろ方向に傾くように端子穴75c、75dに固定される。また、サスペンションワイヤー76a~76fの下端部は、ワイヤー孔61h、61iおよび端子穴65b、65cから離れるに従って後ろ方向に傾くようにワイヤー孔61h、61iおよび端子穴65b、65c固定される。これにより、図3に示す構成体が完成する。この状態で、ミラーユニットフレーム61は、支軸74の周りにTilt方向に回動可能となる。なお、サスペンションワイヤー固定基板65は、ミラーユニットフレーム61のTilt方向の回動に伴って、Tilt方向に回動する。
図3は、ミラーユニット60がマグネットユニット70に取り付けられた状態の構成体の斜視図である。図3(a)は、この構成体を図2の前方向から見た斜視図であり、図3(b)は、この構成体を図2の後方向から見た斜視図である。
図3(b)を参照して、サスペンションワイヤー66aの両端は、それぞれ、2つの端子穴64cの内側の1つと、2つの端子穴65aの内側の1つに接続されている。同様に、サスペンションワイヤー66cの両端は、2つの端子穴64dの内側の1つと、2つの端子穴65bの内側の1つに接続されている。
サスペンションワイヤー66bの両端は、2つの端子穴64cの外側の1つと、2つの端子穴65aの外側の1つに接続されている。同様に、サスペンションワイヤー66dの両端は、2つの端子穴64dの外側の1つと、2つの端子穴65bの外側の1つに接続されている。
サスペンションワイヤー76aの両端は、3つの端子穴75cの内側の1つと、3つの端子穴65cの内側の1つに接続されている。同様に、サスペンションワイヤー76dの両端は、3つの端子穴75dの内側の1つと、3つの端子穴65dの内側の1つに接続されている。
サスペンションワイヤー76bの両端は、3つの端子穴75cの中央の1つと、3つの端子穴65cの中央の1つに接続されている。同様に、サスペンションワイヤー76eの両端は、3つの端子穴75dの中央の1つと、3つの端子穴65dの中央の1つに接続されている。
サスペンションワイヤー76cの両端は、3つの端子穴75cの外側の1つと、3つの端子穴65cの外側の1つと接続されている。同様に、サスペンションワイヤー76fの両端は、3つの端子穴75dの外側の1つと、3つの端子穴65dの外側の1つに接続されている。
なお、図3(a)において、75eは、端子である。端子75eを介して、ミラー69をPan方向とTilt方向に駆動するための駆動信号と、LED68を点灯するための駆動信号が供給される。各端子75eは、それぞれ、端子穴75c、75dの何れかと、サスペンションワイヤー固定基板75上の回路パターンを介して接続されている。
図1に戻り、サーボユニット80は、サーボユニットフレーム81と、ピンホール取り付け金具82と、ピンホール板83と、PSD基板84と、PSD85とを備えている。
サーボユニットフレーム81は、正面視において長方形の輪郭の枠部材からなっている。サーボユニットフレーム81の左右の側面には、ピンホール取り付け金具82を固定するための2つのネジ孔81aが形成されている。また、サーボユニットフレーム81の上下の内側面の前端には、サーボユニットフレーム81の内側に突出した4つの鍔部が形成され、これら4つの鍔部には、それぞれ、ネジ孔81cが形成されている。さらに、サーボユニットフレーム81の左右の内側面の後端には、サーボユニットフレーム81の内側に突出した4つの鍔部が形成され、これら4つの鍔部には、それぞれ、ネジ穴81eが形成されている。
ピンホール取り付け金具82の左右の側面には、2つのネジ穴82aが形成されている。また、ピンホール取り付け金具82の背面には、ピンホール板83を固定するための2つのネジ穴82bと、LED68から出射されたサーボ光をピンホール83aを介してPSD85に導くための開口82cが形成されている。
ピンホール板83には、ピンホール83aと、2つのネジ孔83bが形成されている。ピンホール83aは、LED68から出射された拡散光のうち、一部の光を通過させる。
PSD基板84には、PSD基板84をサーボユニットフレーム81に固定するための4つのネジ孔84aが形成されている。PSD基板84には、PSD85が装着されている。PSD85は、サーボ光の受光位置に応じた信号を出力する。
サーボユニット80の組立時には、ピンホール板83が、ピンホール取り付け金具82の背面に当てられる。この状態で、2つのネジ孔83bを介して2つのネジ83cを2つのネジ穴82bに螺着する。これにより、ピンホール板83がピンホール取り付け金具82に固着される。
次に、ピンホール取り付け金具82が、サーボユニットフレーム81内に収容される。この状態で、4つのネジ孔81aと4つのネジ穴82aとが合わされ、左右から4つのネジ81bをそれぞれネジ孔81aとネジ穴82aに螺着する。これにより、ピンホール取り付け金具82が、サーボユニットフレーム81に固着される。
さらに、PSD基板84が、サーボユニットフレーム81の背部に当てられる。この状態で、4つのネジ孔84aを介して4つのネジ84bを4つのネジ穴81eに螺着する。これにより、PSD基板84が、サーボユニットフレーム81に固着される。こうして、図4に示すサーボユニット80が完成する。図4(a)は、組み立てられたサーボユニット80を前方から見た斜視図、図4(b)は、組み立てられたサーボユニット80を後方から見た斜視図である。
こうしてサーボユニット80が組み立てられた後、サーボユニット80が、図3に示す構成体の背部に当てられる。この状態で、サーボユニットフレーム81の4つのネジ孔81cを介して、後方から4つのネジ81dをマグネットユニットフレーム71の4つのネジ穴71eに螺着する。これにより、サーボユニット80が図3に示す構成体に固着される。こうして、図5に示すように、ミラーアクチュエータ25の組立が完了する。図5(a)は、ミラーアクチュエータ25を前方から見た斜視図、図5(b)は、ミラーアクチュエータ25を後方から見た斜視図である。
図5に示すアセンブル状態において、8つのパンマグネット72(図1参照)は、パンコイル62b、63b(図2(a)参照)に電流を流すことにより、パンコイル装着板62、63に支軸67を軸とする回動力が生じるよう、配置および極性が調整されている。したがって、パンコイル62b、63bに電流を流すと、パンコイル62b、63bに生じる電磁駆動力によってパンコイル装着板62、63とともに支軸67が回動し、これにより、ミラー69が、支軸67を軸として回動する。支軸67を軸とするミラー69の回動方向をPan方向という。なお、パンコイル62b、63bへの電流を流すことを中止すると、ミラー69は、サスペンションワイヤー66a~66dのばね性により、回動前の位置に戻される。
図5に示すアセンブル状態において、8つのチルトマグネット73(図1参照)は、チルトコイル61b(図2(a)参照)に電流を流すことにより、ミラーユニットフレーム61に支軸74を軸とする回動力が生じるよう、配置および極性が調整されている。したがって、チルトコイル61bに電流を流すと、チルトコイル61bに生じる電磁駆動力によって、ミラーユニットフレーム61が、支軸74を軸として回動し、ミラーユニットフレーム61と一体的にミラー69が回動する。支軸74を軸とするミラー69の回動方向をTilt方向という。なお、チルトコイル61bへの電流を流すことを中止すると、ミラーユニットフレーム61は、サスペンションワイヤー76a~76fのばね性により、回動前の位置に戻される。
このようにして、ミラー69をPan方向およびTilt方向に回動させることができる。なお、Pan方向の回動の場合、ミラーユニットフレーム61より小さいサイズのパンコイル装着板62、63によって支軸67を回動させるため、Tilt方向の回動よりもミラー69をスムーズに回動させることができる。また、Pan方向の回動の場合、パンコイル装着板62、63と、支軸67と、ミラー69のみが回動するため、Tilt方向の回動よりもミラー69を大きい角度で回動させることができる。
さらに、上記のようにミラーアクチュエータ25を構成することにより、大きなミラー69を高レスポンスで駆動することができる。このため、目標領域からの反射光を、大きなミラー69で受光できるようになる。
図6、図7は、実施の形態に係るミラーアクチュエータ25が装着された状態のレーザレーダ1の構成を示す図である。
図6(a)は、レーザレーダ1の内部を側面から透視した図、図6(b)は、レーザレーダ1の外観斜視図である。また、図7(a)は、図6(a)におけるA-A’断面図、図7(b)は、レーザユニット20と、ミラーアクチュエータ25と、鏡筒40のみが示された一部斜視図、図7(c)は、図7(a)におけるB-B’断面図である。
図6(a)を参照して、レーザレーダ1は、筐体10と、レーザユニット20と、受光部30と、鏡筒40と、投射/受光窓50と、回路基板100とを備える。
筐体10は、立方体形状をしており、内部に、レーザユニット20と、ミラーアクチュエータ25と、受光部30と、回路基板100とを収容する。図6(b)に示す如く、筐体10の正面には、投射/受光窓50が装着される。
レーザユニット20は、レーザ光源21と、ビーム整形レンズ22と、レーザホルダ23とを備える。
レーザ光源21は、波長900nm程度のレーザ光を出射する。レーザ光源21は、ミラー69のPan方向の回動による目標領域におけるレーザ光の走査範囲を大きくするため、レーザ光の出射方向が、鉛直方向(Y軸正方向)からYZ平面の面内方向においてミラー69側に傾くよう、配置される。
ビーム整形レンズ22は、その光軸がレーザ光源21の出射光軸に一致するようにレーザホルダ23に装着される。また、ビーム整形レンズ22は、出射レーザ光が、目標領域において所定の形状となるよう、出射レーザ光を収束させる。たとえば、目標領域(本実施の形態では、投射/受光窓50から前方数10m程度の位置に設定される)におけるビーム形状が、縦2m、横0.2m程度の楕円形状となるように、ビーム整形レンズ22が設計される。
レーザホルダ23は、レーザ光源21およびビーム整形レンズ22よりも径がやや大きい円筒状であり、内部にレーザ光源21を保持し、正面にビーム整形レンズ22が装着される。
また、図7(a)を参照して、レーザホルダ23は、X軸正方向およびX軸負方向に突出する2つの突出部23aを有している。突出部23aは、目標領域からの反射光が遮光される領域を減らすため、三角形の羽根状の形状となっている。突出部23aの形成方向と形状と目標領域からの反射光との関係は、追って図10を参照して説明する。
レーザ光源21は、鏡筒40に装着された回路基板21aと電気的に接続されている。レーザ光源21と回路基板21aの接続には、目標領域からの反射光が遮光されるのを防ぐため、光を透過する透明配線等が用いられる。透明配線等は、レーザホルダ23に形成されている突出部23aの下部に沿って回路基板21aに接続される。
図6(a)に戻り、ミラーアクチュエータ25は、ミラー69が中立位置にあるとき、ミラーアクチュエータ25のミラー69のミラー面とレーザ光源21から出射されるレーザ光の入射角が所定の角度(たとえば60度)となるように設置される。なお、「中立位置」とは、ミラー69がミラーアクチュエータ25によって回動されず、図1の前後方向に垂直となる位置をいう。中立位置において、ビーム整形レンズ22からのレーザ光は、ミラー69の略中心に入射する。
ミラーアクチュエータ25は、支軸74(図1参照)がX軸に平行(筐体10の底面10aに平行)となるように配置される。また、ミラーアクチュエータ25は、ミラー69のミラー面が、筐体10の底面10a(X-Z平面)に垂直な状態からY-Z平面の面内方向において底面10a(X-Z平面)に近づく方向に所定角度だけ(たとえば30度)傾くように配置される。また、上記のように、レーザ光源21は、レーザ光の出射方向が、鉛直方向(Y軸正方向)からYZ平面の面内方向においてミラー69側に所定角度だけ(たとえば30度)傾くよう、配置される。この状態で、レーザ光源21の出射光軸は、ミラーアクチュエータ25の支軸74に垂直で、且つ、ミラー69のミラー面に対し所定の角度(たとえば60度)傾くようになる。
このようにレーザ光源21とミラーアクチュエータ25を配置することにより、ミラー69が中立位置にあるときにレーザ光源21から出射されたレーザ光は、ミラー69により反射されてZ軸正方向に進むようになる。また、このようにレーザ光源21とミラーアクチュエータ25を配置すると、図6(b)に示す水平方向にレーザ光源21とビーム整形レンズ22が存在しないため、水平方向おけるレーザ光の振り角を大きくとることができる。
ミラーアクチュエータ25は、前述のように、ビーム整形レンズ22を透過した出射レーザ光と目標領域からの反射光が入射するミラー69と、このミラー69を2つの軸の周りに回動させるための機構とを備える。ミラー69が回動することにより、目標領域において出射レーザ光が走査される。さらに、目標領域からの反射光は、出射レーザ光が目標領域へと向かう光路を逆行して、ミラー69に入射する。ミラー69に入射した反射光は、ミラー69により反射され、レーザホルダ23と鏡筒40との間の隙間を介して、受光レンズ32に入射する。
ミラー69により反射された目標領域からの反射光は、ビーム整形レンズ22の光軸に平行に進む。ビーム整形レンズ22側からレーザユニット20を見たとき、ミラー69により反射された目標領域からの反射光の広さは、レーザホルダ23の広さよりも十分に大きい。ミラー69の大きさは、ミラー69により反射された目標領域からの反射光の広さが、レーザホルダ23の広さよりも十分に大きくなるように設定されている。よって、ミラー69によって反射された反射光は、レーザホルダ23の周りを通り抜けて、受光レンズ32に入射する。
かかる反射光の挙動は、ミラー69がどのような回動位置にあっても同じである。すなわち、ミラー69がどのような回動位置にあっても、目標領域からの反射光は、出射レーザ光の光路を逆行し、ビーム整形レンズ22の光軸に平行に進んで、受光レンズ32に入射する。目標領域からの反射光の入射状況については、追って図9を参照して説明する。
受光部30は、バンドパスフィルタ31と、受光レンズ32と、光検出器33とを備える。
バンドパスフィルタ31は、誘電体多層膜で構成されており、出射レーザ光の波長帯域の光のみを透過させる。なお、バンドパスフィルタ31は、反射光が略平行光の状態で入射されるため、簡素な膜構成のものが用いられる。
受光レンズ32は、フレネルレンズであり、目標領域から反射された光を集光する。フレネルレンズは、凸レンズを同心円状の領域に分割し厚みを減らしたレンズである。本実施の形態では、目標領域からの反射光の受光光量をかせぐため、受光レンズ32の径を大きくする必要があり、受光レンズ32として、凸レンズを用いると、厚みが大きくなる。したがって、受光レンズ32には、本実施の形態のようにフレネルレンズを用いる方が望ましい。
光検出器33は、APD(アバランシェ・フォトダイオード)またはPINフォトダイオードからなり、回路基板33aに装着されている。光検出器33は、受光光量に応じた大きさの電気信号を回路基板33aに出力する。光検出器33の受光面は、複数の領域に分割されておらず、単一の受光面からなっている。また、光検出器33の受光面は、迷光の影響を抑えるため、縦横の幅が狭く構成されている(例えば1mm前後)。
図7(a)を参照して、鏡筒40は、内部に内径の大きさが異なる開口40aと、開口40cが形成されている。開口40aは、開口40cおよび受光レンズ32よりも径が大きく、開口40aと開口40cとの段差にバンドパスフィルタ31と、受光レンズ32が装着される。
また、図7(b)に示す如く、開口40aには、X軸方向に並ぶ2つの溝40bが形成されている。2つの溝40bは、レーザホルダ23の突出部23aと係合し、レーザホルダ23をYZ平面の面内方向に傾いた状態で保持する。これにより、図7(c)に示すように、鏡筒40の開口40aのうち、レーザホルダ23と2つの突出部23a以外の部分は、大きな隙間となる。この隙間を介して、目標領域の反射光が受光レンズ32に導かれる。図示のように、レーザホルダ23は、開口40aおよび受光レンズ32に比べ、小さい径であり、突出部23aは、Z軸方向に薄い形状である。したがって、目標領域からの反射光がレーザホルダ23により遮光される光量は、小さいものとなる。
図6(a)に戻り、鏡筒40の上部には、目標領域からの反射光および出射レーザ光が遮光されないよう、ミラー69が中立位置にあるときの出射レーザ光の出射方向に沿って斜めに傾斜する傾斜部40dが形成されている。また、鏡筒40の下部には、光検出器33が装着された回路基板33aが装着され、開口40c内に光検出器33が位置づけられている。
図6(a)のように、レーザレーダ1には、レーザ光源21と、バンドパスフィルタ31と、受光レンズ32と、光検出器33が直線状に並ぶように配置される。レーザ光源21と、ビーム整形レンズ22と、受光レンズ32は、それぞれの光軸が一致するように配置されている。また、これらの光軸がバンドパスフィルタ31の中心と光検出器33の受光面の中心を貫くように、バンドパスフィルタ31と光検出器33が配置されている。
投射/受光窓50は、図6(b)に示すように、表面が湾曲した曲面状の透明な板からなっている。投射/受光窓50は、透明性の高い材料からなり、また、入射面と出射面に反射防止膜(ARコート)が付されている。
レーザ光源21から出射されたレーザ光は、ビーム整形レンズ22によって収束作用を受け、目標領域において所定の形状に整形される。ビーム整形レンズ22を透過したレーザ光は、ミラーアクチュエータ25のミラー69に入射し、ミラー69によって目標領域に向かって反射される。
図6(b)に示す如く、ミラーアクチュエータ25によってミラー69がPan方向およびTilt方向に駆動されることにより、出射レーザ光が目標領域内においてスキャンされる。レーザ光は、目標領域において、X-Z平面に平行な複数の走査ラインに沿ってスキャンされる。各走査ラインに沿ってレーザ光を走査させるために、ミラー69は、Pan方向の他、Tilt方向にも駆動される。また、走査ラインを変更するために、ミラー69がTilt方向に駆動される。
なお、本実施の形態では、目標領域におけるレーザ光のX-Z平面に平行な走査方向(以下、「水平方向」という)の振り角が大きく、目標領域におけるレーザ光のX-Z平面に垂直な走査方向(以下、「鉛直方向」という)の振り角は、水平方向の振り角よりも小さい。
図6(a)に戻り、回路基板100は、レーザ光源21用の回路基板21a(図7(a)参照)と、光検出器33用の回路基板33aと、ミラーアクチュエータ25のサスペンションワイヤー固定基板75と電気的に接続されている。回路基板100は、CPUやメモリ等を備え、レーザ光源21およびミラーアクチュエータ25を制御する。さらに、回路基板100は、光検出器33からの信号に基づいて、目標領域における障害物の有無および障害物までの距離を測定する。具体的には、目標領域における所定の走査位置において、レーザ光源21からレーザ光が出射される。その後、目標領域からの反射光が、筺体10に入射し、ミラーアクチュエータ25のミラー69によって、光検出器33の方に向かって反射される。このときに光検出器33から信号が出力されると、この走査位置に障害物が存在することが検出される。また、この走査位置においてレーザ光が出射されたタイミングと、光検出器33から信号が出力されたタイミングとの時間差から、この障害物までの距離が測定される。レーザレーダ1の回路構成は、追って図11を参照して説明する。
図8(a)は、ミラー69の位置を検出するためのサーボ光学系を説明する図である。同図は、図6(a)の光学系の模式図である。同図には、ミラーアクチュエータ25の一部断面図とレーザ光源21のみが示されている。
上述の如く、ミラーアクチュエータ25には、LED68と、ピンホール取り付け金具82と、ピンホール板83と、PSD基板84と、PSD85が配されている。
LED68、PSD85およびピンホール83aは、ミラーアクチュエータ25のミラー69が上記中立位置にあるときに、LED68がピンホール板83のピンホール83aとPSD85の中心に向き合うように配置されている。すなわち、ミラー69が中立位置にあるとき、LED68から出射されピンホール83aを通るサーボ光が、PSD85の中心に垂直に入射するよう、ピンホール板83およびPSD85が配置されている。また、ピンホール板83は、LED68とPSD85の中間位置よりもPSD85に近い位置に配置されている。
ここで、LED68から拡散するように発せられたサーボ光は、その一部が、ピンホール83aを通過し、PSD85によって受光される。ピンホール83a以外の領域に入射されたサーボ光は、ピンホール板83によって遮光される。PSD85は、サーボ光の受光位置に応じた電流信号を出力する。
たとえば、図8(b)のようにミラー69が破線で示す中立位置から矢印方向に回動すると、LED68の拡散光(サーボ光)のうちピンホール83aを通る光の光路は、LP1からLP2へと変位する。その結果、PSD85上におけるサーボ光の照射位置が変化し、PSD85から出力される位置検出信号が変化する。この場合、LED68からのサーボ光の発光位置と、PSD85の受光面上におけるサーボ光の入射位置は一対一に対応する。したがって、PSD85にて検出されるサーボ光の入射位置によって、ミラー69の位置を検出することができ、結果、目標領域における走査レーザ光の走査位置を検出することができる。
図9は、ミラー69の回動位置と出射レーザ光と反射光の光路の関係と、レーザ光源21と光検出器33との位置関係を説明する図である。同図(a)は、出射レーザ光と反射光の光路を模式的に示す図、同図(b)は、受光レンズ32に対する目標領域からの反射光の入射部分と遮光部分の関係を模式的に示す図である。
同図(a)を参照して、レーザ光源21から出射された出射レーザ光は、ビーム整形レンズ22、ミラー69を介して、投射/受光窓50より目標領域に照射される。
ここで、ミラー69が破線の位置から矢印のように回動すると、出射レーザ光の光路が図中の点線から実線のように変化し、出射レーザ光の進行方向が変化する。これにより、出射レーザ光が目標領域においてスキャンされる。
また、目標領域からの反射光は、投射/受光窓50を透過し、ミラー69によって光検出器33の方に向かって反射される。ミラー69と目標領域との距離は、レーザ光源21とミラー69の距離よりも十分に大きいものとなるため、目標領域からの反射光は、略平行光の状態でミラー69に入射する。このとき、ミラー69のミラー面は、ビーム整形レンズ22からミラー面に入射する出射レーザ光の入射領域に比べて数段広い。このため、目標領域からの反射光がミラー69のミラー面に入射する入射領域は、出射レーザ光のミラー69のミラー面における入射領域よりも、数段広いものとなる。目標領域からの反射光のうち、光検出器33に集光される反射光の光量は、ミラー69のミラー面の広さに依存する。
また、同図(b)に示すように、レーザホルダ23の外径は、鏡筒40の開口40aおよび受光レンズ32の径よりもかなり小さく、レーザホルダ23は、Z軸方向に薄い形状の突出部23aによってのみ、鏡筒40に保持されているため、目標領域からの反射光がレーザホルダ23により遮光される領域(図中濃色網掛け部分)は、小さいものとなる。よって、目標領域からの反射光の大半は、鏡筒40の開口40aと、レーザホルダ23の隙間を介して、バンドパスフィルタ31、受光レンズ32に入射される。したがって、本実施の形態のように、レーザ光源21が、ミラーアクチュエータ25と受光レンズ32との間の光路中に配されても、目標領域からの反射光を適正に受光することができる。
同図(a)に戻り、上記と同様に、ミラー69が破線の位置から矢印のように回動すると、出射レーザ光の進行方向の変化に伴い、目標領域からの反射光の光路は、図中の点線から実線のように変化する。このとき、ミラー69は、実線の位置にあるため、目標領域からの反射光は、ミラー69によって、ミラー69の回動前と同じ方向に反射される。すなわち、反射光は、出射レーザ光がビーム整形レンズ22からミラー69へと向かう光路を逆行する。したがって、ミラー69が回動しても、光検出器33に対する反射光の入射位置は変化しない。
このように、同図(a)の構成では、ミラー69が回動しても、反射光のミラー69から光検出器33までの光路は変化せず、したがって、光検出器33に対する反射光の入射位置は変化しない。このため、単一受光面の幅の小さな光検出器33により、反射光を適正に受光することができる。また、光検出器33の受光面を小さくすることにより、迷光が光検出器33に入射することを抑制でき、光検出器33からの検出信号の精度を高めることができる。
さらに、レーザ光源21が、ミラーアクチュエータ25と光検出器33の間の光路中に配されており、光検出器33が、レーザ光源21の背後に配されているため、出射レーザ光が、直接、または、レーザ光源21の出射口や他の光学素子等によって回折されて光検出器33に入射しにくくなる。よって、レーザ光源21と光検出器33が同一筺体内にあっても、目標領域から反射された以外のレーザ光(迷光)による光検出器33への影響を抑えることができる。
図10は、レーザホルダ23の形状と配置による反射光の入射と遮光状況を説明する図である。同図(a)ないし同図(d)には、便宜上、筺体10の投射/受光窓50と、ミラーアクチュエータ25のミラー69と、レーザユニット20のレーザホルダ23のみが示されおり、淡色網掛け部分により目標領域からの反射光が示され、濃色網掛け部分により当該反射光がレーザホルダ23によって遮光される領域が示されている。
同図(a)は、本実施の形態においてレーザ光が目標領域を水平方向にスキャンしたときの反射光の入射状況を示す模式図である。
本実施の形態では、水平方向(X軸方向)におけるレーザ光の振り角が大きく、また、レーザホルダ23が、YZ平面の面内方向に傾くように配置されている(図9(a)参照)。他方、レーザホルダ23の突出部23aは、X軸方向に張り出すように形成されている。このため、図9(a)のように、レーザ光が水平方向(X軸方向)に大きく振られたとしても、目標領域からの反射光がレーザホルダ23の突出部23aにより、遮光されにくい。
同図(b)は、たとえば、レーザホルダ23の突出部23aが、Y軸方向に張り出すように形成されている場合の比較例を示す模式図である。
本比較例の場合、レーザホルダ23の突出部23aは、レーザ光の水平方向(X軸方向)の走査方向と垂直となるように延びている。この場合、図示のごとく、レーザ光が水平方向に振られると、目標領域からの反射光が、レーザホルダ23の突出部23aに掛かりやすい。また、目標領域からの反射光は、レーザホルダ23のY軸方向に延びた突出部23aの面積の大きい表面に掛かるため、突出部23aにより遮光される領域は、比較的大きいものとなる。この場合、遮光領域は、レーザ光の水平方向(X軸方向)の振り角が大きくなるほど大きくなる。上記のように、本実施の形態では、レーザ光の水平方向の振り角が大きいため、遮光領域は、振り角が大きい範囲で大きくなりやすい。特に、レーザ光が、図9(a)のX-Z平面に平行な状態から下方向(Y軸負方向)に傾いた状態で水平方向に走査されると、レーザ光はさらに突出部23aに掛かりやすくなり、突出部23aによって遮光されやすくなる。
このように、比較例においては、振り角が大きい水平方向にレーザ光が走査されると、目標領域からの反射光が遮光されやすく、遮光される面積も大きいものとなる。このため、光検出器33に対する入射光量が減り、距離測定の精度に悪影響を与える惧れがある。
したがって、レーザホルダ23の突出部23aは、本実施の形態のように、目標領域におけるレーザ光の振り角が大きい水平方向に延びるように形成されるのが望ましい。
同図(c)は、本実施の形態におけるミラー69が中立位置から鉛直方向(Tilt方向)かつ下向き(以下、「鉛直下方向」という)に回動したときの反射光の入射状況を示す模式図である。
図示のように、レーザホルダ23が、ミラー69に近づいて配置される場合、ミラー69が鉛直下方向に大きく回動すると、目標領域からミラー69に向かう反射光は、レーザホルダ23と突出部23aによって、一部が遮光される(図中濃色網掛け部分)。
本実施の形態では、レーザホルダ23の突出部23aは、三角形の羽根状の形状を有しており、ミラー69に近い部分が、ミラー69から遠い部分よりも、幅が狭くなっている。したがって、ミラー69が鉛直下方向に回動した場合に、レーザホルダ23によって遮光される反射光の領域は小さいものとなる。
同図(d)は、たとえば、レーザホルダ23の突出部23aが、長方形の羽根状の形状等で形成されている場合の比較例を示す模式図である。
本比較例の場合、図示のように、ミラー69が鉛直下方向に大きく回動すると、目標領域からミラー69に向かう反射光は、本実施の形態と比べ、レーザホルダ23と突出部23aによって、大きく遮光される。
このように、レーザホルダ23の突出部23aは、本実施の形態のように、ミラー69に近い部分が、ミラー69から遠い部分よりも、幅が小さくなるよう形成されることにより、ミラー69が鉛直下方向に回動した場合において、目標領域からの反射光が遮光される領域を小さくすることができる。よって、レーザホルダ23が、ミラー69に近づいて配置されるような場合においても、目標領域からの反射光を適正に受光することができる。
図11は、レーザレーダ1の回路構成を示す図である。なお、同図には、便宜上、レーザレーダ1の主要な構成が併せて示されている。図示の如く、レーザレーダ1は、PSD信号処理回路101と、サーボLED駆動回路102と、アクチュエータ駆動回路103と、スキャンLD駆動回路104と、PD信号処理回路105と、DSP106を備えている。
PSD信号処理回路101は、PSD85からの出力信号をもとに求めた位置検出信号をDSP106に出力する。サーボLED駆動回路102は、DSP106からの信号をもとに、LED68に駆動信号を供給する。アクチュエータ駆動回路103は、DSP106からの信号をもとに、ミラーアクチュエータ25を駆動する。具体的には、目標領域においてレーザ光を所定の軌道に沿って走査させるための駆動信号がミラーアクチュエータ25に供給される。
スキャンLD駆動回路104は、DSP106からの信号をもとに、レーザ光源21に駆動信号を供給する。具体的には、目標領域にレーザ光を照射するタイミングで、パルス状の駆動信号(電流信号)がレーザ光源21に供給される。
PD信号処理回路105は、光検出器33の受光光量に応じた電圧信号を増幅およびデジタル化してDSP106に供給する。
DSP106は、PSD信号処理回路101から入力された位置検出信号をもとに、目標領域におけるレーザ光の走査位置を検出し、ミラーアクチュエータ25の駆動制御や、レーザ光源21の駆動制御等を実行する。また、DSP106は、PD信号処理回路105から入力される電圧信号に基づいて、目標領域内のレーザ光照射位置に障害物が存在するかを判定し、同時に、レーザ光源21から出力されるレーザ光の照射タイミングと、光検出器33にて受光される目標領域からの反射光の受光タイミングの間の時間差をもとに、障害物までの距離を測定する。
以上、本実施の形態によれば、レーザ光を走査させるためのミラーアクチュエータ25を、受光系にも共用することで、ミラー69が回動しても、光検出器33に対する反射光の入射位置を一定にすることができる。したがって、単一受光面の小さな光検出器33により、反射光を適正に受光することができる。
また、本実施の形態によれば、レーザ光源21が、ミラーアクチュエータ25と光検出器33の間の光路中に配されており、光検出器33が、レーザ光源21の背後に位置するため、出射レーザ光が、直接、または、レーザ光源21の出射口や他の光学素子等によって回折されて光検出器33に入射しにくくなる。よって、レーザ光源21と光検出器33が同一筺体内にあっても、目標領域から反射された以外のレーザ光(迷光)による光検出器33への影響を抑えることができる。
また、本実施の形態によれば、図6(a)、(b)に示すように、レーザ光源21から出射されたレーザ光を、下からミラー69に入射させたため、水平方向(X軸方向)におけるレーザ光の振り角を大きくでき、目標領域における水平方向の走査範囲を大きくすることができ、さらに、目標領域からの反射光がレーザホルダ23により、遮光されにくくなる。
また、本実施の形態によれば、レーザホルダ23の径は、受光レンズ32の径よりも小さく、レーザホルダ23は、薄い形状の突出部23aによってのみ、鏡筒40に保持されているため、目標領域からの反射光がレーザホルダ23により遮光される光量は、小さいものとなる。よって、レーザ光源21が、ミラーアクチュエータ25と受光レンズ32の間の光路中に配されても、目標領域からの反射光を適正に受光することができる。
また、本実施の形態によれば、レーザホルダ23の突出部23aが、レーザ光の振り角が大きい水平方向(X軸方向)に張り出すように形成されているため、レーザ光が水平方向に大きく振られても、目標領域からの反射光がレーザホルダ23により遮光される光量は、小さいものとなる。よって、目標領域からの反射光をより適正に受光することができる。
さらに、本実施の形態によれば、レーザホルダ23の突出部23aが、ミラー69に近い部分が、ミラー69から遠い部分よりも、幅が小さくなるよう形成されているため、ミラー69が鉛直下方向に回動した場合に、目標領域からの反射光が遮光される領域を小さくすることができる。よって、レーザホルダ23がミラー69に近づいて配置される構成においても、目標領域からの反射光を適正に受光することができる。したがって、レーザレーダ1の小型化を図ることができる。
以上、本発明の実施の形態について説明したが、本発明は上記実施の形態に何ら制限されるものではなく、また、本発明の実施の形態も上記以外に種々の変更が可能である。
たとえば、上記実施の形態では、レーザ光の水平方向の振り角を大きくするため、図6(a)、(b)のように、レーザ光が下からミラー69に入射するようにレーザ光源21が設置されたが、レーザ光の鉛直方向の振り角を大きくする場合や、筺体10の高さを低くしたい場合は、レーザ光は横からミラー69に入射するように、レーザ光源21が設置されてもよい。
図12は、この場合のレーザレーダ1の構成を示す図である。なお、本変更例において、レーザ光の出射方向以外の構成は、上記実施の形態と同様であり、同一の符号が付されている。
同図(a)は、レーザレーダ1の内部を上面側から透視した図、同図(b)は、レーザレーダ1を正面からみた図である。
同図(a)、同図(b)に示すように、レーザ光源21は、X軸負方向にレーザ光を出射するように設置されている。また、ミラーアクチュエータ25は、中立位置において、ミラー69のミラー面がX-Z平面に垂直で、且つ、レーザ光源21の光軸がミラー69のミラー面に対して45度となるように設置される。
また、レーザホルダ23の突出部23aは、Z軸方向に延びるように形成される。こうすると、上記実施の形態と同様、レーザ光を水平方向に走査させたときに、目標領域からの反射光が突出部23aによって遮光されにくくなる。
また、上記実施の形態では、レーザホルダ23の突出部23aは、三角形の羽根状で形成されたが、たとえば、L字型や、1つの角が直角の台形の羽根状で形成されてもよい。このほか、ミラーアクチュエータ25に近づく部分が小さくなるような形状であれば、どのような形状でもよい。
また、突出部23aの素材が、光が透過可能な素材によって形成されてもよい。これにより、さらに目標領域からの反射光が遮光されるのを抑えることができる。また、突出部23aの数は、2個に限らず、1個や3個以上としても良い。ただし、突出部23aの数が増える程、突出部23aによって遮光される光量が増えるため、突出部23aの数はなるべく少ない方が望ましい。
さらには、突出部23aを設けずに、ビーム整形レンズ22の光軸に垂直な方向に延びる光透過板によって、レーザホルダが保持されても良い。
図13は、この場合のレーザレーダ1の構成を示す図である。図13には、筺体10のカバーが外された状態のレーザレーダ1の内部が模式的に示されており、ミラーアクチュエータ25は、簡略化されて示されている。
図13を参照して、レーザレーダ1は、上記実施の形態のレーザユニット20に代えて、レーザユニット24を備えている。また、レーザレーダ1は、上記実施の形態の鏡筒40に代えて、鏡筒41を備えている。なお、ミラーアクチュエータ25および受光部30は、上記実施の形態と同様に構成されているため、詳細な説明は省略する。
図14(a)、(b)は、レーザユニット24の筺体10のベース10bに垂直な平面の断面を模式的に示す断面図である。図14(a)は、各部材が分解された状態のレーザユニット24が示されており、図14(b)は、各部材が組み立てられた状態のレーザユニット24が示されている。
レーザユニット24は、レーザホルダ241と、留めネジ242と、光透過板243と、レンズホルダ244を備えている。
レーザホルダ241は、アルミ等の金属によって形成されている。レーザホルダ241は、前後で外周の径が異なる略円筒形状となっている。前方には、大径部241aが形成されており、後方には、大径部241aよりも径が小さい小径部241bが形成されている。小径部241bの後方の一部には、ネジ溝241cが設けられている。大径部241aの外周には、留めネジ242に螺着される際の滑り止めのため、ローレット加工が成されている(図13参照)。
また、レーザホルダ241は、内部にレンズホルダ244を収容するための円形の開口241dとレーザ光源21を収容するための円形の開口241eが形成されている。開口241dの径は、レンズホルダ244の小径部244bの外径よりもやや大きく、開口241eの径は、レーザ光源21のベース211の径よりもやや大きい。
さらに、開口241dと開口241eの間には、開口241d、241eよりも径が小さいリング状の段部241fが形成され、段部241fの内側に円形の孔が形成されている。段部241fの内側の孔の径は、レーザ光源21のCAN212の径よりもやや大きい。レーザ光源21のベース21aの前面がレーザホルダ241の段部241fに当接するまで、後方からレーザ光源21が開口241eに嵌め込まれる。これにより、レーザ光源21がレーザホルダ241に対して位置決めされ、レーザ光源21がレーザホルダ241に接着固定される。
留めネジ242は、レーザホルダ241と同様に、アルミ等の金属によって形成されている。また、留めネジ242は、内部にレーザホルダ241を収容するための開口242aが形成された略円筒形状となっている。開口242aの径は、レーザホルダ241の小径部241bよりもやや大きい。開口242a内には、レーザホルダ241のネジ溝241cと噛み合うネジ溝242bが設けられている。また、留めネジ242の外周には、レーザホルダ241と螺着する際の滑り止めのため、ローレット加工が成されている(図13参照)。
光透過板243は、光が透過可能なガラスによって形成されている。光透過板243の入射面と出射面には、目標領域からの反射光の透過率を高めるため、反射防止膜が付されている。光透過板243は、正面視において、上部が直線状にカットされたカット部243aを有する略半円形状となっている(図13参照)。光透過板243は、レーザホルダ241を安定的に保持するため、前後方向の厚みがやや厚くなっている。
光透過板243は、目標領域からの反射光を受光レンズ32(図13参照)に導くため、光透過板243によって反射光が屈折した後においても、受光レンズ32のレンズ面の全体に反射光が入射する程度の径を有している。光透過板243の中央には、レーザホルダ241を通すための円形の開口243bが形成されている。開口243bの径は、レーザホルダ241の大径部241aよりも小さく、レーザホルダ241の小径部241bよりやや大きい。
レンズホルダ244は、レーザホルダ241と同様に、アルミ等の金属によって形成されている。レンズホルダ244は、前後で外周の径が異なる略円筒形状となっている。前方には、大径部244aが形成されており、後方には、大径部244aよりも径が小さい小径部244bが形成されている。レンズホルダ244は、内部にビーム整形レンズ22を収容し、レーザ光源21から出射されたレーザ光をビーム整形レンズ22に導くための円形の開口244cが形成されている。開口244cの前方の径は、ビーム整形レンズ22の径よりもやや大きい。開口244cには、段部244dが形成されており、段部244dの部分における開口244cの径は、開口244cの前方の径よりも小さくなっている。ビーム整形レンズ22の後面の周辺部がレンズホルダ244の段部244dに当接するまで、前方からビーム整形レンズ22が開口244cに嵌め込まれる。この状態で、ビーム整形レンズ22がレンズホルダ244に接着固定される。
レーザユニット24の組立時には、まず、前方からレーザホルダ241の小径部241bが光透過板243の開口243bに通される。その後、光透過板243を挟み込むようにして、後方から、留めネジ242がレーザホルダ241のネジ溝241cに螺着される。これにより、光透過板243が、レーザホルダ241の大径部241aと小径部241bとの間の段差と、留めネジ242の前面との間に挟持される。
そして、この状態で、レンズホルダ244の小径部244bが、レーザホルダ241の開口241dに通される。この状態で、レーザ光源21からレーザ光が出射され、所定の距離において、レーザ光が焦点を結ぶように、レンズホルダ244が前後方向に位置調整される。これにより、ビーム整形レンズ22のフォーカス調整がなされる。ビーム整形レンズ22のフォーカス調整がなされた後、レンズホルダ244は、レーザホルダ241に接着固定される。
こうして、図14(b)に示すレーザユニット24が組み立てられる。
図15(a)は、鏡筒41とレーザホルダ保持部42の分解斜視図、図15(b)は、レーザホルダ保持部42を後方から見た斜視図、図15(c)は、鏡筒41にレーザホルダ保持部42が組み付けられた状態を示す斜視図である。
図15(a)を参照して、鏡筒41は、光を透過しない樹脂材等により形成されている。鏡筒41には、上記実施の形態と同様、目標領域からの反射光および出射レーザ光が遮光されないようミラー69が中立位置にあるときの出射レーザ光の出射方向に沿って傾斜する傾斜部41aが形成されている。また、鏡筒41は、上記実施の形態と同様、背部に装着される光検出器33(図13参照)に反射光を導くための開口41bが形成されている。開口41bには、段差が設けられており、この段差に当接するように、開口41bに受光レンズ32が装着される(図13参照)。さらに、鏡筒41には、レーザホルダ保持部42を固定するためのネジ穴41c~41eが設けられている。
レーザホルダ保持部42は、鏡筒41と同様に光を透過しない樹脂材等で形成されている。レーザホルダ保持部42は、正面視において、中央に略半形状の開口42aが形成されている。開口42aの径は、レーザユニット24の光透過板243の径よりもやや大きい。開口42aの後方には、段部42bが形成されている。また、開口42aの左右の上端には、切り欠き42cが形成されている。さらに、レーザホルダ保持部42の左下隅には、前方向から後方向に延びる溝42dが形成されており、溝42dの後方には、ネジ孔42eが形成されている。図15(b)を参照して、同様に、レーザホルダ保持部42の右上隅には、前方向から後方向に延びる溝42fとネジ孔42gが形成されており、レーザホルダ保持部42の右下隅には、前方向から後方向に延びる溝42hとネジ孔42iが形成されている。
レーザユニット24の鏡筒41への装着時には、まず、前方からレーザホルダ保持部42の背面42mが鏡筒41の前面41fに押し当てられ、レーザホルダ保持部42のネジ孔42eが、ネジ穴41cに、ネジ孔42gが、ネジ穴41dに、ネジ孔42iが、ネジ穴41eに合わされる。この状態で、ネジ孔42e、42g、42iを介して、ネジ42j、42k、42lが鏡筒41のネジ穴41c、41d、41eに螺着される。これにより、レーザホルダ保持部42が鏡筒41に固着される。
その後、レーザユニット24が、前方から、レーザホルダ保持部42の開口42aに通され、光透過板243が段部42bに当接するように押し当てられる。この状態で、切り欠き42cから接着剤が流入され、光透過板243がレーザホルダ保持部42に接着固定される。
こうして、図15(c)に示す構成体が組み立てられる。その後、図13に示すように、鏡筒41がベース10b上に配置された保持枠43に、鏡筒41が所定の角度(上記実施の形態同様、たとえば、60度)で傾くように、ネジにより固着される。これにより、レーザユニット24は、所定の傾きをもって、ミラーアクチュエータ25にレーザ光を出射し、目標領域からの反射光を、光透過板243を介して受光レンズ32、光検出器33に導くことができる。
図16(a)は、鏡筒41とレーザホルダ保持部42を正面から見た模式図である。図16(b)は、受光レンズ32に対する目標領域からの反射光の入射部分と遮光部分の関係を模式的に示す図である。
図16(a)に示す如く、レーザホルダ241の径R1は、光透過板243の径R2よりもかなり小さい。また、光透過板243の径R2は、受光レンズ32の径R3よりもやや大きい。光透過板243には、カット部243aが設けられている。したがって、図16(b)に示すように、カット部243aよりも上部の領域においては、目標領域からの反射光は、遮光されず、開口41bを通過し、受光レンズ32のレンズ面の上部に入射される。カット部243aよりも下部の領域においては、目標領域からの反射光は、レーザホルダ241とレーザホルダ保持部42によってのみ、遮光され、その他の領域に入射する反射光は、光透過板243を透過し、受光レンズ32のレンズ面の下部に入射される。こうして、受光レンズ32の上部と下部に入射した反射光は、受光レンズ32によって、光検出器33に収束される。
このように、本変更例では、光透過板243によってレーザホルダ241が保持されているため、上記の実施の形態よりも、さらに、目標領域からの反射光が遮光される領域を小さくすることができる。また、本変更例では、レーザホルダ241がビーム整形レンズ22の光軸に垂直な方向に延びる光透過板243を介して、レーザホルダ保持部42の開口42aに装着される。したがって、図7に示すように、レーザホルダ23が、ビーム整形レンズ22の光軸に水平な方向に延びる薄板状の突出部23aによって、溝40bに保持される場合に比べ、レーザホルダ241は、安定的に鏡筒41に保持される。また、本変更例では、簡素な略半円形状の光透過板243によって、レーザホルダ241が保持されるため、上記実施の形態の羽根状の突出部23aに比べ、容易にレーザレーダ1を製造することができる。
なお、本変更例では、レーザホルダ保持部42は、鏡筒41と別個の部材で構成されたが、鏡筒41の前面41fに、前方向に突出する保持部を一体的に形成し、この保持部にレーザユニット24が収容されるようにしてもよい。
また、本変更例では、出射レーザ光を妨げないように、光透過板243は、略半円形形状になるように、カット部243aが設けられたが、カット部243aを設けずに、略円形形状となるように形成されてもよい。また、光透過板243は、一つに限られるものではなく、周方向に分断されるように複数設けられても良い。
また、本変更例では、光透過板243は、ガラスにより形成されたが、光が透過可能であれば、樹脂等、他の素材であってもよい。
また、上記実施の形態および変更例において、レーザホルダ23が、光透過性に優れた材料から形成されても良い。ただし、この場合、レーザホルダ23の内側は塗料などで遮光することが望ましい。これは、たとえば、レーザ光源21から出射された迷光(レーザ光はレーザチップの反対側からも出射されるので、レーザチップの前方から出力される主たるレーザ光以外に不要なレーザ光が迷光として出力され得る。)がレーザホルダ23を透過して誤検出の原因となったり、また、レーザ光源21から出射されたレーザ光がビーム整形レンズ22の表面で反射し、これがレーザホルダ23を透過して誤検出の原因となったりするのを防ぐためである。さらには、レーザホルダ23の肉厚を、レーザホルダ23の外径が鏡筒40の開口40aの内径よりも僅かに小さい程度まで厚くして、突出部23aを省略しても良い。この構成では、レーザホルダ23を開口40aに嵌め込むことにより、レーザ光源21とビーム整形レンズ22が鏡筒40に装着される。目標領域からの反射光は、レーザホルダ23の肉厚部分を透過して、受光レンズ32へと導かれる。
また、上記実施の形態では、水平方向のレーザ光の振り角が鉛直方向のレーザ光の振り角よりも大きくなるようにレーザレーダ1を構成したが、鉛直方向のレーザ光の振り角が水平方向のレーザ光の振り角よりも大きくなるようにレーザレーダ1を構成してもよい。
また、上記実施の形態では、鏡筒40によって、レーザユニット20と、受光部30が、一体的に保持されたが、レーザユニット20のみを保持する部材と、受光部30のみを保持する部材が用いられてもよい。
また、上記実施の形態では、突出部23aによって、鏡筒40の開口40aにレーザホルダ23が装着されたが、レーザホルダ23と突出部23aは、遮光を低減するように透明な材料から形成されるのが望ましい。ただし、前述の如く、レーザホルダ23の内側は塗料などで遮光することが望ましい。
また、上記実施の形態では、受光レンズ32として、フレネルレンズが用いられたが、凸レンズ等が用いられても良い。
さらに、上記実施の形態では、2つの軸の周りにミラーが回転するミラーアクチュエータの構成例を示したが、本発明は、上記以外の構成のミラーアクチュエータや、ポリゴンミラーを用いたアクチュエータにも適用可能である。
この他、本発明の実施の形態は、特許請求の範囲に示された技術的思想の範囲内において、適宜、種々の変更が可能である。
1 … レーザレーダ
10 … 筺体
21 … レーザ光源
22 … ビーム整形レンズ
23 … レーザホルダ
23a… 突出部
241 … レーザホルダ
243 … 光透過板(支持部材)
25 … ミラーアクチュエータ(駆動部、アクチュエータ)
32 … 受光レンズ(集光素子)
33 … 光検出器
40 … 鏡筒(保持部材)
41 … 鏡筒(固定部)
42 … レーザホルダ保持部(固定部)
67 … 支軸(第1の回動軸)
69 … ミラー
74 … 支軸(第2の回動軸)
10 … 筺体
21 … レーザ光源
22 … ビーム整形レンズ
23 … レーザホルダ
23a… 突出部
241 … レーザホルダ
243 … 光透過板(支持部材)
25 … ミラーアクチュエータ(駆動部、アクチュエータ)
32 … 受光レンズ(集光素子)
33 … 光検出器
40 … 鏡筒(保持部材)
41 … 鏡筒(固定部)
42 … レーザホルダ保持部(固定部)
67 … 支軸(第1の回動軸)
69 … ミラー
74 … 支軸(第2の回動軸)
Claims (8)
- レーザ光を出射するレーザ光源と、
前記レーザ光を目標領域に向かって反射するミラーと、
前記レーザ光が前記目標領域を走査するように前記ミラーを駆動する駆動部と、
前記目標領域において反射され、さらに、前記ミラーによって反射された前記レーザ光の反射光を集光する集光素子と、
前記集光素子により集光された前記反射光を受光する光検出器と、を備え、
前記レーザ光源は、前記ミラーと前記集光素子との間の光路中に配され、
前記ミラーは、前記反射光が前記レーザ光源の周りを通り抜けて前記集光素子に入射する大きさを有する、
ことを特徴とするレーザレーダ。 - 請求項1に記載のレーザレーダにおいて、
前記レーザ光源と、前記集光素子と、前記光検出器は、前記反射光の進行方向に一列に並ぶように配される、
ことを特徴とするレーザレーダ。 - 請求項1または2に記載のレーザレーダにおいて、
前記駆動部は、
前記ミラーを第1の回動軸および当該第1の回動軸に垂直な第2の回動軸の回りに回動させるアクチュエータを備える、
ことを特徴とするレーザレーダ。 - 請求項3に記載のレーザレーダにおいて、
前記レーザ光源は、前記第2の回動軸に垂直な方向で、且つ、前記第1および第2の回動軸の回りの中立位置に前記ミラーがあるときに前記ミラーに対して傾く方向から前記レーザ光が前記ミラーに入射するように配置され、
前記第1の回動軸の回りの前記ミラーの回動範囲が、前記第2の回動軸の回りの前記ミラーの回動範囲よりも大きく設定されている、
ことを特徴とするレーザレーダ。 - 請求項3または4に記載のレーザレーダにおいて、
前記レーザ光源と、前記ミラーと、前記アクチュエータと、前記集光素子と、前記光検出器とを収容する筐体を備え、
前記ミラーは、前記ミラーが前記中立位置にあるときに、前記筐体の底面に垂直な状態から前記底面の方向に傾くように配置され、
前記アクチュエータは、前記第2の回動軸が前記筐体の前記底面に平行となるように配置され、
前記レーザ光源は、出射方向が前記筐体の底面に垂直な方向から前記ミラーの方向に傾くように配置される、
ことを特徴とするレーザレーダ。 - 請求項1ないし5の何れか一項に記載のレーザレーダにおいて、
前記レーザ光源と前記ミラーとの間に配され、前記レーザ光源から出射されたレーザ光のビーム形状を整形するビーム整形レンズと、
前記レーザ光源と前記ビーム整形レンズとを収容するレーザホルダと、
前記レーザホルダを保持する中空の保持部材と、をさらに備え、
前記レーザホルダは、前記レーザホルダの外側面から突出し、且つ、前記ビーム整形レンズの光軸に平行な方向に延びる薄板状の突出部によって、前記保持部材の内側面に支持される、
ことを特徴とするレーザレーダ。 - 請求項1ないし5の何れか一項に記載のレーザレーダにおいて、
前記レーザ光源と前記ミラーとの間に配され、前記レーザ光源から出射されたレーザ光のビーム形状を整形するビーム整形レンズと、
前記レーザ光源と前記ビーム整形レンズとを収容するレーザホルダと、
前記レーザホルダを固定するための固定部と、
前記レンズホルダの外周と前記固定部とを連結して前記レンズホルダを前記固定部に支持させる光透過性の支持部材と、をさらに備える、
ことを特徴とするレーザレーダ。 - 請求項7に記載のレーザレーダにおいて、
前記支持部材は、前記レーザホルダの外側面に配され、且つ、前記ビーム整形レンズの光軸に垂直な方向に延びる板状の光透過性部材からなっている、
ことを特徴とするレーザレーダ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013510942A JPWO2012144341A1 (ja) | 2011-04-20 | 2012-04-06 | レーザレーダ |
| CN2012800109338A CN103415781A (zh) | 2011-04-20 | 2012-04-06 | 激光雷达 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011094542 | 2011-04-20 | ||
| JP2011-094542 | 2011-04-20 | ||
| JP2011276365 | 2011-12-16 | ||
| JP2011-276365 | 2011-12-16 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012144341A1 true WO2012144341A1 (ja) | 2012-10-26 |
Family
ID=47041453
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/059448 WO2012144341A1 (ja) | 2011-04-20 | 2012-04-06 | レーザレーダ |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JPWO2012144341A1 (ja) |
| CN (1) | CN103415781A (ja) |
| WO (1) | WO2012144341A1 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101707033B1 (ko) * | 2016-08-27 | 2017-02-27 | (주)엠제빈 | 라이다 기반의 광대역 보안 시스템 |
| JP2017125765A (ja) * | 2016-01-14 | 2017-07-20 | コニカミノルタ株式会社 | 対象物検出装置 |
| KR101814116B1 (ko) * | 2017-02-09 | 2018-01-02 | (주)엠제빈 | 광대역 보안 시스템을 위한 수신감도가 높은 라이다 |
| KR101887477B1 (ko) * | 2017-04-21 | 2018-08-10 | (주)엠제빈 | 안전 및 보안 시스템을 위한 가이드 광원을 포함하는 광대역 광센서 시스템 |
| CN108572359A (zh) * | 2018-06-08 | 2018-09-25 | 上海禾赛光电科技有限公司 | 一种用于激光雷达的接收系统 |
| JP2020008760A (ja) * | 2018-07-10 | 2020-01-16 | スタンレー電気株式会社 | 電気装置 |
| CN113424080A (zh) * | 2020-01-03 | 2021-09-21 | 深圳市速腾聚创科技有限公司 | 激光雷达及汽车 |
| CN113640815A (zh) * | 2019-04-26 | 2021-11-12 | 上海禾赛科技有限公司 | 激光雷达及其探测装置 |
| CN113866784A (zh) * | 2019-08-08 | 2021-12-31 | 上海禾赛科技有限公司 | 激光雷达及其控制方法 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6012589B2 (ja) * | 2013-12-27 | 2016-10-25 | オムロンオートモーティブエレクトロニクス株式会社 | レーザレーダ装置及び物体検出方法 |
| WO2015155812A1 (ja) * | 2014-04-11 | 2015-10-15 | パナソニックIpマネジメント株式会社 | ミラー駆動装置、ビーム照射装置およびレーザレーダ |
| CN106291448B (zh) * | 2016-08-02 | 2021-02-19 | 北京国承万通信息科技有限公司 | 光束扫射机构和光束发射装置 |
| CN106767513A (zh) * | 2016-12-30 | 2017-05-31 | 武汉海达数云技术有限公司 | 三维激光扫描装置 |
| WO2019144364A1 (en) * | 2018-01-26 | 2019-08-01 | Shenzhen Genorivision Technology Co. Ltd. | A light detector |
| WO2019220787A1 (ja) * | 2018-05-17 | 2019-11-21 | パナソニックIpマネジメント株式会社 | 距離測定装置 |
| EP3805788B1 (en) * | 2018-06-08 | 2023-08-23 | Panasonic Intellectual Property Management Co., Ltd. | Distance measuring device |
| CN109001745B (zh) * | 2018-08-09 | 2024-02-13 | 上海星秒光电科技有限公司 | 单线雷达驱动装置及单线雷达 |
| CN111670374A (zh) * | 2019-01-09 | 2020-09-15 | 深圳市大疆创新科技有限公司 | 一种测距装置 |
| CN110456364A (zh) * | 2019-07-19 | 2019-11-15 | 北醒(北京)光子科技有限公司 | 一种激光雷达模块 |
| WO2021139670A1 (zh) * | 2020-01-06 | 2021-07-15 | 北京一径科技有限公司 | 激光收发模组、激光雷达和激光雷达用窗 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4412044A1 (de) * | 1994-04-08 | 1995-10-12 | Leuze Electronic Gmbh & Co | Optoelektronische Vorrichtung zum Erfassen von Gegenständen in einem Überwachungsbereich |
| JPH0815413A (ja) * | 1994-06-24 | 1996-01-19 | Mitsubishi Electric Corp | 距離測定装置 |
| JP2001050723A (ja) * | 1999-08-11 | 2001-02-23 | Minolta Co Ltd | 距離測定装置 |
| JP2005331468A (ja) * | 2004-05-21 | 2005-12-02 | Sharp Corp | 測距機能を備えた照明装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3056144B2 (ja) * | 1997-09-18 | 2000-06-26 | 日本電気ロボットエンジニアリング株式会社 | 画像読取方法および装置、ミラー駆動方法および機構 |
-
2012
- 2012-04-06 WO PCT/JP2012/059448 patent/WO2012144341A1/ja active Application Filing
- 2012-04-06 CN CN2012800109338A patent/CN103415781A/zh active Pending
- 2012-04-06 JP JP2013510942A patent/JPWO2012144341A1/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4412044A1 (de) * | 1994-04-08 | 1995-10-12 | Leuze Electronic Gmbh & Co | Optoelektronische Vorrichtung zum Erfassen von Gegenständen in einem Überwachungsbereich |
| JPH0815413A (ja) * | 1994-06-24 | 1996-01-19 | Mitsubishi Electric Corp | 距離測定装置 |
| JP2001050723A (ja) * | 1999-08-11 | 2001-02-23 | Minolta Co Ltd | 距離測定装置 |
| JP2005331468A (ja) * | 2004-05-21 | 2005-12-02 | Sharp Corp | 測距機能を備えた照明装置 |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017125765A (ja) * | 2016-01-14 | 2017-07-20 | コニカミノルタ株式会社 | 対象物検出装置 |
| KR101707033B1 (ko) * | 2016-08-27 | 2017-02-27 | (주)엠제빈 | 라이다 기반의 광대역 보안 시스템 |
| KR101814116B1 (ko) * | 2017-02-09 | 2018-01-02 | (주)엠제빈 | 광대역 보안 시스템을 위한 수신감도가 높은 라이다 |
| KR101887477B1 (ko) * | 2017-04-21 | 2018-08-10 | (주)엠제빈 | 안전 및 보안 시스템을 위한 가이드 광원을 포함하는 광대역 광센서 시스템 |
| CN108572359A (zh) * | 2018-06-08 | 2018-09-25 | 上海禾赛光电科技有限公司 | 一种用于激光雷达的接收系统 |
| CN108572359B (zh) * | 2018-06-08 | 2023-06-16 | 上海禾赛科技有限公司 | 一种用于激光雷达的接收系统 |
| JP7061041B2 (ja) | 2018-07-10 | 2022-04-27 | スタンレー電気株式会社 | 電気装置 |
| JP2020008760A (ja) * | 2018-07-10 | 2020-01-16 | スタンレー電気株式会社 | 電気装置 |
| CN113640815A (zh) * | 2019-04-26 | 2021-11-12 | 上海禾赛科技有限公司 | 激光雷达及其探测装置 |
| CN113866784A (zh) * | 2019-08-08 | 2021-12-31 | 上海禾赛科技有限公司 | 激光雷达及其控制方法 |
| CN113866784B (zh) * | 2019-08-08 | 2023-02-03 | 上海禾赛科技有限公司 | 激光雷达及其控制方法 |
| CN113424080A (zh) * | 2020-01-03 | 2021-09-21 | 深圳市速腾聚创科技有限公司 | 激光雷达及汽车 |
| CN113424080B (zh) * | 2020-01-03 | 2023-08-29 | 深圳市速腾聚创科技有限公司 | 激光雷达及汽车 |
| US11885913B2 (en) | 2020-01-03 | 2024-01-30 | Suteng Innovation Technology Co., Ltd. | LiDAR and automobile |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103415781A (zh) | 2013-11-27 |
| JPWO2012144341A1 (ja) | 2014-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2012144341A1 (ja) | レーザレーダ | |
| JP2012154806A (ja) | レーザレーダおよび受光装置 | |
| JP2012159330A (ja) | レーザレーダ | |
| US10191273B2 (en) | Mirror driving device, beam irradiation device, and laser radar | |
| JP2012154642A (ja) | レーザレーダおよび受光装置 | |
| WO2013080625A1 (ja) | ミラーアクチュエータ、ビーム照射装置およびレーザレーダ | |
| JP6907956B2 (ja) | ライダー装置 | |
| JP6620983B2 (ja) | 粒子検出センサ | |
| JP2014145671A (ja) | レーザレーダ | |
| JP2015125109A (ja) | レーザレーダおよびビーム照射装置 | |
| JP2013130531A (ja) | レーザレーダ | |
| JP2010014680A (ja) | ビーム照射装置 | |
| JP2013130422A (ja) | レーザレーダ | |
| WO2013080626A1 (ja) | ミラーアクチュエータ、ビーム照射装置およびレーザレーダ | |
| US20100321751A1 (en) | Mirror actuator and beam irradiation device | |
| JP2012141191A (ja) | レーザレーダ | |
| JP2011047833A (ja) | ビーム照射装置 | |
| US8537448B2 (en) | Mirror actuator and beam irradiation device | |
| WO2014174734A1 (ja) | ビーム照射装置、レーザレーダおよびミラーアクチュエータ | |
| JP2011047832A (ja) | ビーム照射装置およびレーザレーダ | |
| US20200348400A1 (en) | Lidar device | |
| JP7170251B2 (ja) | 距離測定装置 | |
| JP2019039722A (ja) | 距離測定装置 | |
| JP3778011B2 (ja) | 投受光パッケージ | |
| JP2010048564A (ja) | ビーム照射装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12774790 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2013510942 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 12774790 Country of ref document: EP Kind code of ref document: A1 |