WO2012115083A1 - 空間情報検出装置 - Google Patents
空間情報検出装置 Download PDFInfo
- Publication number
- WO2012115083A1 WO2012115083A1 PCT/JP2012/054064 JP2012054064W WO2012115083A1 WO 2012115083 A1 WO2012115083 A1 WO 2012115083A1 JP 2012054064 W JP2012054064 W JP 2012054064W WO 2012115083 A1 WO2012115083 A1 WO 2012115083A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- signal
- light
- charge
- unit
- amount
- Prior art date
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/32—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
- G01S17/894—3D imaging with simultaneous measurement of time-of-flight at a 2D array of receiver pixels, e.g. time-of-flight cameras or flash lidar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4912—Receivers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4912—Receivers
- G01S7/4915—Time delay measurement, e.g. operational details for pixel components; Phase measurement
Abstract
Description
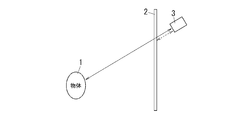
距離測定装置は、図1に示すように、検出対象となる空間に投光する投光部11と、当該空間から受光する受光部12とを備える。空間に物体(対象物)1が存在していると、投光部11から投光された光(以下、「信号光」という)は物体1で反射され、受光部12に物体1からの反射光が入射する。したがって、信号光を投光部11から投光してから受光部12で受光されるまでの時間(飛行時間)に相当する物理量を計測することにより、物体1までの距離が計測される。すなわち、図示する距離測定装置は、飛行時間法(タイムオブフライト法)の原理を用いて距離を測定する。


次に、物体1での反射光の強度を検出する強度検出装置について説明する。強度検出装置では、発光源111から空間に信号光を投光する投光期間と、発光源111から空間に信号光を投光しない非投光期間とを設け、投光期間に受光した光から非投光期間に検出される環境光の成分を除去することにより、反射光の強度を検出する。



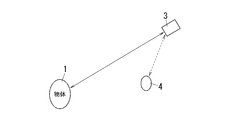
以下では、図2に示すように、空間情報検出装置3と検出対象となる空間(対象区域)との間に、非対象物体としてガラス板のような透明物体2が存在している場合に、空間情報の誤検出を防止する技術について説明する。透明物体2は、発光源111から投光する信号光が透過する物体を意味し、可視光は必ずしも透過しなくてもよい。また、空間情報検出装置3が、距離画像を生成する距離測定装置である場合を例にして説明するが、濃淡画像を生成する強度検出装置である場合も同様の技術を採用可能である。さらに、受光部12として単一の受光領域を備えた受光素子を用いる場合も同様の技術を採用可能である。また、透明物体2ではなくとも、図3のように、空間情報の検出対象である空間(対象区域)と空間情報検出装置3との間となる領域(非対象区域)に、非対象物体である物体4が存在する場合にも、以下の技術により空間情報の誤検出を防止することができる。要するに、空間情報の検出対象である空間(対象区域)と空間情報検出装置3との間となる領域(非対象区域)に、透明物体2や物体4のような非対象物体が存在することによって、非対象物体からの反射光が空間情報検出装置3に入射する場合には、以下の技術により誤検出を防止できる。
距離測定装置3(空間情報検出装置)の誤検出の原因になる透明物体2は、窓板や仕切板を想定しており、距離測定装置の使用時において距離測定装置と透明物体との相対位置が変化しないとみなしてよい。したがって、距離測定装置3に対して透明物体2の存在位置が既知であって、距離測定装置3において生成する電荷から透明物体2に相当する成分を除去することができれば、透明物体2の影響を除去することができると考えられる。







本実施形態の空間情報検出装置は、図1に示すように、投光部11と、受光部12と、演算部30と、コード発生器31と、変調信号生成部32と、復調信号発生部33と、補正情報提供部34と、を備える。すなわち、本実施形態は、距離画像を生成する基本の構成に対し、補正情報提供部34を付加している。

実施形態1では、透明物体2のみが存在する範囲において補正情報gA、gτを算出する技術を説明したが、補正情報gA、gτを算出する際に透明物体2のみが存在する状態とするのが困難な場合がある。そこで、距離測定装置に対して、距離の測定を行う空間よりも透明物体2との距離のほうが小さいことを利用して、透明物体2に関する補正情報gA、gτを取得する技術について説明する。
上述した各実施形態では、距離測定装置について透明物体2の存在下における動作を説明したが、強度検出装置を用いる場合でも、補正情報gA、gτを用いることにより、透明物体2の存在により生じた電荷を除いて空間情報を算出することができる。すなわち、本実施形態の空間情報検出装置は、強度検出装置として用いられる。









Claims (9)
- 所定の対象区域を含む空間に信号光を放射する投光部と、
前記空間からの光を受ける受光部と、
変調信号を生成して前記投光部に出力する変調信号生成部と、
復調信号を生成して前記受光部に出力する復調信号生成部と、
前記対象区域に関する空間情報を生成する演算部と、
補正情報提供部と、
を備え、
前記変調信号は、ハイレベルである期間とロウレベルである期間との長さが所定の単位期間の整数倍の長さから乱数的に決定された方形波信号であり、
前記投光部は、前記変調信号を受け取ると前記変調信号で光を変調して前記信号光を生成するように構成され、
前記復調信号は、前記変調信号または反転された前記変調信号と同じ波形を有する信号であり、
前記受光部は、前記復調信号がハイレベルである第1期間とロウレベルである第2期間とのいずれか一方の期間で定義される集積期間の間に前記空間から受け取った光の強度に応じた電荷を生成し、前記集積期間の間に生成された電荷を前記集積期間よりも長い所定の蓄積期間に亘って蓄積して信号電荷を生成するように構成され、
前記補正情報提供部は、前記投光部および前記受光部と前記対象区域との間の非対象区域からの光に起因して前記受光部で生成される電荷に関する補正情報を生成するように構成され、
前記演算部は、前記補正情報を利用して前記信号電荷の量を前記対象区域からの光に起因して前記受光部で生成される電荷に対応する対象電荷の量に補正し、前記対象電荷の量に基づいて前記空間情報を生成するように構成される
ことを特徴とする空間情報検出装置。 - 探索信号を生成して前記受光部に出力する探索信号生成部を備え、
前記探索信号は、前記変調信号に対して所定の時間差を有する信号であり、
前記補正情報提供部は、位相可変部と、補正情報算出部と、を備え、
前記受光部は、前記探索信号がハイレベルである第1期間とロウレベルである第2期間とのいずれか一方の期間で定義される第2集積期間の間に前記空間から受け取った光の強度に応じた電荷を生成し、前記第2集積期間の間に生成された電荷を前記第2集積期間よりも長い所定の第2蓄積期間に亘って蓄積して補正電荷を生成するように構成され、
前記位相可変部は、前記時間差が異なる複数の前記探索信号を前記探索信号生成部が生成するように、所定の時間範囲内において前記時間差を前記単位期間より小さい変化幅で変化させるように構成され、
前記補正情報算出部は、前記時間差が異なる前記探索信号毎に前記受光部から前記補正電荷を取得し、前記時間差と前記補正電荷の量との関係に基づいて前記補正情報を生成するように構成される
ことを特徴とする請求項1記載の空間情報検出装置。 - 前記空間情報は、前記対象区域に存在する対象物までの距離であり、
前記演算部は、前記信号光が前記投光部から放射されてから前記対象物で反射された前記信号光を前記受光部が受け取るまでにかかる飛行時間を前記対象電荷の量から算出し、前記飛行時間に基づいて前記距離を求めるように構成され、
前記補正情報は、非対象成分と、非対象飛行時間とを含み、
前記非対象成分は、前記非対象区域からの光に起因して前記受光部で生成された電荷に対応する非対象電荷の量であり、
前記非対象飛行時間は、前記信号光が前記投光部から放射されてから前記非対象区域に存在する非対象物体で反射された前記信号光を前記受光部が受け取るまでにかかる時間であり、
前記補正情報算出部は、前記時間差に対する前記補正電荷の量の変化率を算出するように構成され、
前記補正情報算出部は、前記時間差に対して前記補正電荷の量が直線的に変化する範囲における前記変化率と、前記単位期間と、の積を前記非対象成分として求めるように構成され、
前記補正情報算出部は、前記変化率が0に変わるときの前記時間差を前記非対象飛行時間として求めるように構成され、
前記演算部は、前記非対象成分および前記非対象飛行時間を用いて前記信号電荷の量を前記対象電荷の量に換算する換算式を、予め記憶するように構成され、
前記演算部は、前記補正情報提供部から得た前記非対象成分および前記非対象飛行時間と、前記換算式とを用いて、前記信号電荷の量を前記対象電荷の量に補正するように構成される
ことを特徴とする請求項2記載の空間情報検出装置。 - 前記復調信号生成部は、複数の前記復調信号を生成するように構成され、
前記複数の復調信号は、前記変調信号と同じ波形を有する第1の復調信号と、前記第1の復調信号を反転させた信号である第2の復調信号と、前記第1の復調信号から前記単位期間遅延する第3の復調信号と、前記第3の復調信号を反転させた信号である第4の復調信号とのうち2つを含む
ことを特徴とする請求項3記載の空間情報検出装置。 - 前記空間情報は、前記対象区域における前記信号光の反射強度であり、
前記補正情報は、非対象成分を含み、
前記非対象成分は、前記非対象区域からの光に起因して前記受光部で生成された電荷に対応する非対象電荷の量であり、
前記補正情報算出部は、前記時間差に対する前記補正電荷の量の変化率を求めるように構成され、
前記補正情報算出部は、前記時間差に対して前記補正電荷の量が直線的に変化する範囲における前記変化率と、前記単位期間との積を前記非対象成分として求めるように構成され、
前記演算部は、前記非対象成分を用いて前記信号電荷の量を前記対象電荷の量に換算する換算式を、予め記憶するように構成され、
前記演算部は、前記補正情報提供部から得た前記非対象成分と、前記換算式とを用いて、前記信号電荷の量を前記対象電荷の量に補正するように構成される
ことを特徴とする請求項2記載の空間情報検出装置。 - 前記投光部は、投光期間に前記信号光を放射し、非投光期間に前記信号光を放射しないように構成され、
前記演算部は、前記投光期間に対応する前記対象電荷の量と前記非投光期間に対応する前記対象電荷の量との差に基づいて前記反射強度を求めるように構成される
ことを特徴とする請求項5項記載の空間情報検出装置。 - 前記補正情報提供部は、前記対象電荷を含まない前記補正電荷が前記受光部から得られる前記時間差の有効範囲を指定する範囲設定部を備え、
前記補正情報算出部は、前記範囲設定部で指定された前記有効範囲内の前記時間差と前記補正電荷の量との関係に基づいて前記補正情報を生成するように構成される
ことを特徴とする請求項2~6のうちいずれか1項記載の空間情報検出装置。 - 前記補正情報提供部は、前記所定の時間範囲内の前記時間差と前記補正電荷の量との関係に基づいて前記有効範囲を決定する補正情報取得部を備え、
前記範囲設定部は、前記補正情報取得部で決定された前記有効範囲を指定するように構成される
ことを特徴とする請求項7記載の空間情報検出装置。 - 前記補正情報提供部は、所定の更新条件が満たされたかどうかを判定し、前記更新条件が満たされたと判定すると前記補正情報を更新するように構成される
ことを特徴とする請求項1~8のうちいずれか1項記載の空間情報検出装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP12749340.1A EP2680035A4 (en) | 2011-02-21 | 2012-02-21 | DEVICE FOR DETECTING SPATIAL INFORMATION |
| JP2013501044A JP5655133B2 (ja) | 2011-02-21 | 2012-02-21 | 空間情報検出装置 |
| US13/985,935 US9030676B2 (en) | 2011-02-21 | 2012-02-21 | Spatial information detection device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011-035030 | 2011-02-21 | ||
| JP2011035030 | 2011-02-21 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012115083A1 true WO2012115083A1 (ja) | 2012-08-30 |
Family
ID=46720860
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/054064 WO2012115083A1 (ja) | 2011-02-21 | 2012-02-21 | 空間情報検出装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9030676B2 (ja) |
| EP (1) | EP2680035A4 (ja) |
| JP (1) | JP5655133B2 (ja) |
| TW (1) | TWI442077B (ja) |
| WO (1) | WO2012115083A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014163717A (ja) * | 2013-02-22 | 2014-09-08 | Stanley Electric Co Ltd | 距離画像生成装置および距離画像生成方法 |
| CN105739584A (zh) * | 2014-08-20 | 2016-07-06 | 全视科技有限公司 | 用于飞行时间3d图像传感器的可编程电流源 |
| JPWO2015125478A1 (ja) * | 2014-02-24 | 2017-03-30 | 日本電気株式会社 | 物体検出装置、pos端末装置、物体検出方法及びコンピュータプログラム |
| WO2020026626A1 (ja) * | 2018-08-01 | 2020-02-06 | ソニーセミコンダクタソリューションズ株式会社 | 計測装置 |
| CN111033315A (zh) * | 2017-08-08 | 2020-04-17 | 国立大学法人静冈大学 | 距离图像测定装置以及距离图像测定方法 |
| JP2021526219A (ja) * | 2018-04-16 | 2021-09-30 | ▲寧▼波▲飛▼芯▲電▼子科技有限公司Ningbo Abax Sensing Co., Ltd. | 測距方法、装置、センサー及びセンサーアレイ |
| WO2022064605A1 (ja) * | 2020-09-24 | 2022-03-31 | 株式会社ソニー・インタラクティブエンタテインメント | 位置情報取得システム、位置情報取得方法、および位置情報取得装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10324033B2 (en) * | 2012-07-20 | 2019-06-18 | Samsung Electronics Co., Ltd. | Image processing apparatus and method for correcting an error in depth |
| TWI564754B (zh) * | 2014-11-24 | 2017-01-01 | 圓剛科技股份有限公司 | 空間運動感測器與空間運動感測方法 |
| CN106527761A (zh) | 2015-09-10 | 2017-03-22 | 义明科技股份有限公司 | 非接触式光学感测装置及三维空间物件深度位置感测方法 |
| TWI625538B (zh) * | 2015-09-10 | 2018-06-01 | 義明科技股份有限公司 | 非接觸式光學感測裝置及感測三維空間之物件深度位置的方法 |
| CN112424640A (zh) * | 2018-07-17 | 2021-02-26 | 索尼半导体解决方案公司 | 电子设备和方法 |
| EP3715907B1 (en) * | 2019-03-27 | 2024-02-28 | Infineon Technologies AG | Methods and apparatuses for compensating light reflections from a cover of a time-of-flight camera |
| JP7348099B2 (ja) * | 2020-02-13 | 2023-09-20 | 株式会社アドバンテスト | 光学試験用装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004045304A (ja) | 2002-07-15 | 2004-02-12 | Matsushita Electric Works Ltd | 撮像素子を用いた測距装置および測距方法 |
| JP2006121617A (ja) | 2004-10-25 | 2006-05-11 | Matsushita Electric Works Ltd | 空間情報の検出装置 |
| WO2010098454A1 (ja) * | 2009-02-27 | 2010-09-02 | パナソニック電工株式会社 | 距離測定装置 |
| JP2011022089A (ja) * | 2009-07-17 | 2011-02-03 | Panasonic Electric Works Co Ltd | 空間情報検出装置 |
| JP2011022088A (ja) * | 2009-07-17 | 2011-02-03 | Panasonic Electric Works Co Ltd | 空間情報検出装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19704496C2 (de) | 1996-09-05 | 2001-02-15 | Rudolf Schwarte | Verfahren und Vorrichtung zur Bestimmung der Phasen- und/oder Amplitudeninformation einer elektromagnetischen Welle |
| US6906793B2 (en) * | 2000-12-11 | 2005-06-14 | Canesta, Inc. | Methods and devices for charge management for three-dimensional sensing |
| EP1612511B1 (en) | 2004-07-01 | 2015-05-20 | Softkinetic Sensors Nv | TOF rangefinding with large dynamic range and enhanced background radiation suppression |
| EP2116864A1 (en) * | 2008-05-09 | 2009-11-11 | Vrije Universiteit Brussel | TOF range finding with background radiation suppression |
-
2012
- 2012-02-21 JP JP2013501044A patent/JP5655133B2/ja not_active Expired - Fee Related
- 2012-02-21 EP EP12749340.1A patent/EP2680035A4/en not_active Withdrawn
- 2012-02-21 TW TW101105555A patent/TWI442077B/zh not_active IP Right Cessation
- 2012-02-21 US US13/985,935 patent/US9030676B2/en active Active
- 2012-02-21 WO PCT/JP2012/054064 patent/WO2012115083A1/ja active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004045304A (ja) | 2002-07-15 | 2004-02-12 | Matsushita Electric Works Ltd | 撮像素子を用いた測距装置および測距方法 |
| JP2006121617A (ja) | 2004-10-25 | 2006-05-11 | Matsushita Electric Works Ltd | 空間情報の検出装置 |
| WO2010098454A1 (ja) * | 2009-02-27 | 2010-09-02 | パナソニック電工株式会社 | 距離測定装置 |
| JP2011022089A (ja) * | 2009-07-17 | 2011-02-03 | Panasonic Electric Works Co Ltd | 空間情報検出装置 |
| JP2011022088A (ja) * | 2009-07-17 | 2011-02-03 | Panasonic Electric Works Co Ltd | 空間情報検出装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2680035A4 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014163717A (ja) * | 2013-02-22 | 2014-09-08 | Stanley Electric Co Ltd | 距離画像生成装置および距離画像生成方法 |
| JPWO2015125478A1 (ja) * | 2014-02-24 | 2017-03-30 | 日本電気株式会社 | 物体検出装置、pos端末装置、物体検出方法及びコンピュータプログラム |
| US10534072B2 (en) | 2014-02-24 | 2020-01-14 | Nec Corporation | Object detection device, POS terminal device, object detection method, program, and program recording medium |
| CN105739584A (zh) * | 2014-08-20 | 2016-07-06 | 全视科技有限公司 | 用于飞行时间3d图像传感器的可编程电流源 |
| US9658336B2 (en) | 2014-08-20 | 2017-05-23 | Omnivision Technologies, Inc. | Programmable current source for a time of flight 3D image sensor |
| CN111033315A (zh) * | 2017-08-08 | 2020-04-17 | 国立大学法人静冈大学 | 距离图像测定装置以及距离图像测定方法 |
| JP2021526219A (ja) * | 2018-04-16 | 2021-09-30 | ▲寧▼波▲飛▼芯▲電▼子科技有限公司Ningbo Abax Sensing Co., Ltd. | 測距方法、装置、センサー及びセンサーアレイ |
| JP7251742B2 (ja) | 2018-04-16 | 2023-04-04 | ▲寧▼波▲飛▼芯▲電▼子科技有限公司 | 測距方法、装置、センサー及びセンサーアレイ |
| WO2020026626A1 (ja) * | 2018-08-01 | 2020-02-06 | ソニーセミコンダクタソリューションズ株式会社 | 計測装置 |
| US11523099B2 (en) | 2018-08-01 | 2022-12-06 | Sony Semiconductor Solutions Corporation | Measurement device |
| WO2022064605A1 (ja) * | 2020-09-24 | 2022-03-31 | 株式会社ソニー・インタラクティブエンタテインメント | 位置情報取得システム、位置情報取得方法、および位置情報取得装置 |
| JP7446455B2 (ja) | 2020-09-24 | 2024-03-08 | 株式会社ソニー・インタラクティブエンタテインメント | 位置情報取得システム、位置情報取得方法、および位置情報取得装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2012115083A1 (ja) | 2014-07-07 |
| TWI442077B (zh) | 2014-06-21 |
| EP2680035A1 (en) | 2014-01-01 |
| EP2680035A4 (en) | 2015-02-18 |
| US20130329234A1 (en) | 2013-12-12 |
| US9030676B2 (en) | 2015-05-12 |
| TW201243373A (en) | 2012-11-01 |
| JP5655133B2 (ja) | 2015-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5655133B2 (ja) | 空間情報検出装置 | |
| JP5261571B2 (ja) | 距離測定装置 | |
| US10686994B2 (en) | Imaging device, and solid-state imaging element used for same | |
| US9325920B2 (en) | Processing of time-of-flight signals | |
| US9058081B2 (en) | Application using a single photon avalanche diode (SPAD) | |
| US11693093B2 (en) | Distance-measuring apparatus that outputs precision information | |
| JP5760167B2 (ja) | 空間情報検出装置 | |
| US20120153120A1 (en) | Proximity sensor and associated method, computer readable medium and firmware | |
| JP2006308522A (ja) | 空間情報検出装置 | |
| WO2019200833A1 (zh) | 一种测距方法、装置、测距传感器以及传感阵列 | |
| JP2009192499A (ja) | 距離画像生成装置 | |
| JP5760168B2 (ja) | 空間情報検出装置 | |
| US11393115B2 (en) | Filtering continuous-wave time-of-flight measurements, based on coded modulation images | |
| CN112135114A (zh) | 使用合并模块的飞行时间图像传感器分辨率增强和增加的数据鲁棒性 | |
| JP2020046247A (ja) | 距離計測装置、及び距離計測方法 | |
| US7609367B2 (en) | Method and device for 3D imaging | |
| JP2006337286A (ja) | 形状計測装置 | |
| JP4673674B2 (ja) | 形状測定装置 | |
| JP2008107205A (ja) | 空間情報の検出装置 | |
| JP2006201037A (ja) | 形状測定装置 | |
| JP6693757B2 (ja) | 距離画像生成装置および方法 | |
| Seiter et al. | Correction of a phase dependent error in a time-of-flight range sensor | |
| WO2021059638A1 (ja) | 距離測定装置 | |
| US20210270946A1 (en) | Time-of-flight measurement with background light correction | |
| GB2485991A (en) | Camera using a Single Photon Avalanche Diode (SPAD) array |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12749340 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2013501044 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13985935 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2012749340 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |