JP4673674B2 - 形状測定装置 - Google Patents
形状測定装置 Download PDFInfo
- Publication number
- JP4673674B2 JP4673674B2 JP2005165270A JP2005165270A JP4673674B2 JP 4673674 B2 JP4673674 B2 JP 4673674B2 JP 2005165270 A JP2005165270 A JP 2005165270A JP 2005165270 A JP2005165270 A JP 2005165270A JP 4673674 B2 JP4673674 B2 JP 4673674B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- irradiation
- imaging
- shape
- measuring apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Description
人物や商品などを撮像するさいに、背景抜き出しや測定物体の表面形状を計測する形状測定装置では、非特許文献1に開示されるように、通常は、光切断法と呼ばれる、光スリットを測定物体表面に照射しながら、その変形をカメラで観測することでカメラから測定物体までの距離、つまり表面形状を計測する。
また、ステレオ法と呼ばれる複数のカメラから視差情報を用いて測定物体の表面形状測定することが多い。これらの方法は三角測量の原理を用いているため、光源とカメラの間、あるいはカメラ同士の間に距離を必要とする。それらの視差により互いに見えない部分が生じる(いわゆる「隠れ」)ことがある。見えない部分は形状データが得られないので、近傍点から類推するか、測定位置を変えて再測定することで回避するが、表面形状が複雑だと隠れをなくすことが不可能な場合もある。
隠れが生じない測定方法にTOF(タイム・オブ・フライト)法がある。この方法は、距離計測装置から光を発し、測定物体上で反射して戻る光の時間をなんらかの方法で計測するものである。
これには、特許文献1に開示されるような周波数変調したレーザ光源を照射し、反射光とビートを取ることで距離に相当する位相ずれを測定する方法、または特許文献2に開示されるような時間方向に増加する光パルスと減少する光パルスを照射し、これら2つのパルスに対して各々計測した反射光強度の比を測定することで距離を計測する方法が知られている。
図5は特許文献1に開示の従来例を示すブロック図である。この形状計測装置には、変調回路1、半導体レーザ2、コリメータレンズ3、ビームスプリッタ4、ミラー5、光検出器6、集光レンズ7、スキャナ8、モータ9、周期/周波数計測回路10、距離演算回路11、障害物検知回路12、および被計測物体13が示されている。
かかる形状計測装置(特許文献1の技術)は、比較的精度よく距離計測できるが、位相ずれを2次元的に検知できる素子がないため、1度に1点しか距離計測できない短所を持ち、形状測定にはあまり向いていない。
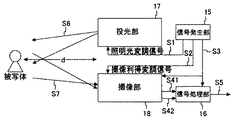
投光部17からは被写体へ照明光S6が照射され、被写体からの反射光S7は撮像部18へ入る。撮像部18から映像信号S41,S42が信号処理部16へ送られる。信号処理部16からは処理された信号が立体情報信号S5として出力される。
かかる形状計測装置(特許文献2の技術)は、また、1ns以下のごく狭い時間帯で光量の測定を行うことで、数cmきざみの距離分解能を持たせることができ、また短時間のシャッタ機能を備えた2次元受光素子を利用することで、一括で画像の画素ごとに距離計測を行なえる。
図7は光強度を三角形状に変調した光パターンを2つの場合で示す概略図である。図5および図6で示した形状計測装置は、図7に示すように、光強度を三角形状に変調した光パターンでなければならず、同じ周期の正弦波で変調した場合に比べ変調時に高い周波数特性が要求される。
また、図6では、上りの三角形と下りの三角形の強度の比を用いて、測定物体の反射率をキャンセルしているため、計測時に信号以外の外乱光が混入するとこの比がずれてしまうため、背景光除去に注意を払う必要がある。
後者は1ns以下のごく狭い時間帯で光量を測定を行うことで、数cmきざみの距離分解能をもたせることができ、また短時間のシャッタ機能を備えた2次元受光素子を利用することで、一括で画像の画素ごとに距離計測をおこなえる。しかし図Cに示すように、光強度を直線状に変調しなければならず、距離精度はこのパルス形状の精度でアナログ的に決まる問題がある。
そこで、本発明の目的は、上述した実情を考慮して、測定物体表面から戻る反射光(反射パルス)から距離決定を行うさいに、照射パターンのパルスパターンを簡単に実現でき、パルス光量変動に対する安定性を向上させる形状測定装置を提供することにある。
また、請求項2に記載の発明は、前記照射パターンが、bが2であり、m=1の場合は{0,1}、m=2の場合は{0,1,0,1}と、1と0が交互に繰り返される請求項1の形状測定装置を特徴とする。
また、請求項3に記載の発明は、前記照射パターンが、bが2であり、いわゆるグレーコードである請求項1の形状測定装置を特徴とする。
また、請求項4に記載の発明は、前記照射手段の前方の距離Loに半透明の反射板を設け、この反射板から戻る反射光の戻り時間toから、撮像に対する照射の遅れtdをtd=to−2Lo/c(cは光速)で求めて遅れを補正する請求項1の形状測定装置を特徴とする。
また、請求項6に記載の発明は、前記照射手段が、レーザダイオードや発光ダイオードなどの半導体光源であり、前記撮像手段は電子増倍作用を持ったイメージインテンシファイアである請求項1の形状測定装置を特徴とする。
また、請求項7に記載の発明は、前記照射手段の光源を赤外光源とし、前記撮像手段に可視光を除去する光フィルタを設ける請求項1の形状測定装置を特徴とする。
また、請求項8に記載の発明は、前記照射手段の光源を赤外光源とし、前記撮像手段に赤外光と可視光を分離する第2のミラーを設け、分離した赤外光から形状を測定し、可視光から形状に貼り付けるテキスチャデータを得る請求項7の形状測定装置を特徴とする。
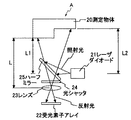
測定物体20はレーザダイオード21から距離L1からL2(L2>L1とする)の範囲に存在し、照射パターンはL1とL2の時間遅延tp(=2(L2−L1)/c)をb^m分割し(bは正の整数、m=1,...n,nは正の整数、b^mはbのm乗、cは光速を意味する)、各分割時間の間にレベル0からb−1の一定で離散的な光強度をとるtpを周期とする多値光パルス列である。
受光素子アレイ22は距離L1にある測定物体20からの反射光が受光素子アレイ22に戻る時間t1のタイミングで撮像パターンの光強度を計測し、計測された光強度を2値化したn種類のコードから、測定物体の距離を求めるようにしている。
具体的に述べれば、レーザダイオード21はレーザの出力光を変調して照射パターンを生成する。受光素子アレイ22はレンズ23とCMOSフォトダイオードが2次元状に配列され、レンズ23の直前に配した光シャッタ24からなる。
ハーフミラー25を利用してレンズ23の光学中心とレーザダイオード21の発光中心を光学的に同じ位置に合わせてあるため、測定物体20から見ると、レーザダイオード21と受光素子アレイ22は同じ場所にあるように見える。そのため、通常の光切断法と異なり、照明と撮像の間に視差がない。
レーザダイオード21から照射された光パルスはハーフミラー25で折り曲げられて測定物体20上に照射される。この測定物体20上で散乱された光の一部は、照射と同じ経路を逆にたどって、ハーフミラー25を透過し、光シャッタ24を抜けて受光素子アレイ22上に結像する。レンズ23の焦点距離をfとすると、レンズ23と受光素子アレイ22との距離はおおむねfとなる。
レンズ23の光学中心から測定物体20までの距離をL、光速をcとすると、レーザダイオード21から照射されたパルス列は、測定物体20上で反射されて、2Lだけ伝播し、時間t後に光シャッタ24に戻ってくる。
t=2L/c
t1=2L1/c
t2=2L2/c
である。
レーザの照射するパルス幅tpを
tp=2(L2−L1)/c
とし、tpをb^m分割し、その間一定でb値パルス列をn個照射する。b=3、n=3の場合は次の3つのパルス列を照射する。{ }の中の数値はb値のパルス列の光強度を時間順に並べたもので、{ }の先頭がパルス先頭を意味し、tpを周期に以下のパルス列が繰り返される。
{0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 2 2 2 2 2 2 2 2 2}m=1
{0 0 0 1 1 1 2 2 2 0 0 0 1 1 1 2 2 2 0 0 0 1 1 1 2 2 2}m=2
{0 1 2 0 1 2 0 1 2 0 1 2 0 1 2 0 1 2 0 1 2 0 1 2 0 1 2}m=3
レーザのパルスに同期して、距離L1にある測定物体20からの反射光が撮像手段22に戻る時間t1のタイミングで光シャッタ24を一瞬開ける。光強度を観察すると、m=1のパルス列の場合、距離xがL1<x<L1+(L2−L1)/3の場合は上記のパルス列が若干遅れて到着するためレベル2が計測される。
L1+(L2−L1)/3<x<L1+(L2−L1)2/3の場合はレベル1が計測され、L1+(L2−L1)2/3<x<L2の場合はレベル0が計測される。
m=2の場合は、xの繰り返し周期が1/3になるだけで、距離xがL1<x<L1+(L2−L1)/3^2の場合はレベル2が計測され、L1+(L2−L1)/3^2<x<L1+(L2−L1)2/3^2の場合はレベル1が計測され、L1+(L2−L1)2/3^2<x<L1+L1+(L2−L1)/3の場合はレベル0が計測される。
xと(L2−L1)/3だけずれた位置で反射された場合でも同じレベルが観察される。m=3では、さらにxの繰り返し周期が1/3になるだけ、距離に応じてレベル0、1、2が観察されるのは同じである。
つまりn種のb値パルスを使うことで、L1からL2の距離をb^n分割(ここでは3^3=27分割)して、n個のb値コード(b1,b2,b3)で表すことができる。(L2−L1)/b^nをdLとすると、コードが(2,2,2)ならL1から1番目の区間(L1<x<L1+dL)、(2,2,1)なら2番目の区間(L1+dL<x<L1+2dL)などとなる。
計測周期数をk周期に増やし、得られた光量を受光素子内の光生成された電荷として加算すれば、積算光量はk倍できて受光素子のノイズに埋もれず光強度の計測を行うことができる。
この装置で高速動作しなくてはならないのは、レーザダイオードと光シャッタだけであり、高価になり易い高速変調素子の数を2個に抑えられることが利点である。高速変調素子の個数が少なければ、相互の時間同期も取り易い。
受光素子アレイ22を用いているため、アレイの各画素からレンズ23の光学中心を通して見た方向ごとに、測定物体20表面の距離が同時に求められる。受光素子アレイ22は通常のCCDやCMOS受光素子アレイで十分であり、光強度の2値判定だけが必要なので、入射光量に対する信号の線形性もそれほど高くなくてもよい。
図2において、図1と同一部分には同一符号を付してとくに必要以外の説明は省略する。図2の形状測定装置Aでは、追加的に、照射パターンは、具体的にn=3の場合のパルス列を示す。3値に比べて表現できるコード数(分割数)が8に減る。
{0 0 0 0 1 1 1 1}m=1
{0 0 1 1 0 0 1 1}m=2
{0 1 0 1 0 1 0 1}m=3
とくに2値化(b=2)することで、離散化パルスの中で最も安定に区間コードを判別できる。もちろん3値以上に比べて、同じ距離分解能dLを得ようとすると、nの値を増やし、計測回数を増やさなくてはならないが、外乱光などに対する形状計測の安定性を必要とする場合は、2値化が望ましい。
したがって、照射パターンを、1と0が交互に繰り返されるパルス列とすることによって、パターンが実装し易くなっているため、照射や観測を簡単に実現できる。
第2の実施の形態の第1の変形例の形状測定装置では、第1の実施の形態に加え、照射パターンはbが2であり、いわゆるグレーコードであることを特徴とする。
具体的にn=3の場合のパルス列を示す。表現できるコード数(分割数)は第2の実施の形態と同じ8であるが、パルスパターンが異なる。
{0 0 0 0 1 1 1 1}m=1
{0 0 1 1 1 1 0 0}m=2
{0 1 1 0 0 1 1 0}m=3
グレーコードは、隣接するコード間で1ビットしか符合が変わらない特徴があり、第2の実施の形態の単純に0、1が繰り返されるコードに比較して、復号する手間が掛かるが判定誤りが少ない利点がある。外乱光などに対する形状計測の安定性を必要とする場合は2値化だけでなく、グレーコードを用いてさらに安定性を確保することができる。
第2の実施の形態の第2の変形例の形状測定装置では、第2の実施の形態またはその第1の変形例に加え、撮像手段22は距離L1にある測定物体20からの反射光が撮像手段22に戻る時間を起点にして積算計測された光強度をP1とする。
また、撮像手段22は距離L1にある測定物体20からの反射光が撮像手段22に戻る時間t1からさらにdtだけ遅れた時間を起点にし、計測される2値の光量が反転するようにdtを選ぶ。そして計測された光強度をP2として、光量差(P1−P2)の正負を2値化したn種類のコードから、測定物体20の距離を求めるようにしている。
反転したパルス列を観測した結果は、各々1+δ、0+δの光強度P2が観察されるので、(P1−P2)は光量ノイズが相殺されて、−1、1のレベルの光強度が計測される。
(P1−P2)の負を0、正を1と判定すれば光量ノイズの影響を受けずに区間判定を行えることになる。この方法を使えば、光強度差を2値化することで、照射パターンのパルスパターンのなまりを相殺できる。したがって、パルスがなまって正弦波に近くなっても検知でき、コード判定の誤りを減らせる利点もあり、より低コストの変調素子で光源や撮像素子を駆動できることになる。
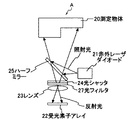
第2の実施の形態の第3の変形例の形状測定装置では、第1の実施の形態に加え、照射手段21の前方の距離Loに半透明の反射板を設け、この反射板から戻る反射光の戻り時間toから、撮像に対する照射の遅れtdをtd=to−2Lo/c(cは光速)でもとめて遅れを補正するようにしている。
図2のように、レンズの光学中心からLoの距離に半透明な参照ミラー26を設けておく。レーザパルスの基準期間に比べて光シャッタ24の基準時間がずれてtdだけ早い場合、レーザがレーザ自体の基準時間tlに1つの短パルスを発生すると、光シャッタ24の基準時間tsに対してt=ts+2Lo/C+tdの時間に光シャッタ24を開くと、パルスが観察される。
反射板から戻る反射光の戻り時間to=t−ts=2Lo/C+tdなので、td=to−2Lo/cから、基準時間tsに対するtlの遅れを求めることができるので、ts’=ts−dtを新たに光シャッタ24の補正された基準時間とすることで、照射と撮像のより正確な同期を取ることができる。
このように、半透明の反射板を設け、この反射板から戻る反射光の戻り時間から撮像に対する照射の遅れを計測することで、照射と撮像のタイミングずれを予測しているので、距離測定の誤差を低減できる。
図3において、図1と同一部分には同一符号を付してとくに必要以外の説明は省略する。
第3の実施の形態の形状測定装置Aでは、第1の実施の形態に加え、撮像手段22から一定の光量を照射して計測した撮像光の光強度をPmax、撮像手段22から光照射を行わずに計測した背景光の光強度をPmin、計測した光強度をP、規格化光強度をPnorm=K(P−Pmin)/(Pmax−Pmin)で求め、定数KをPnormの最大値を1とするように決め、Pnormを2値化して形状を求めるようにしている。
撮像手段22で計測される光強度Pは、照射強度Psと測定物体表面の反射率σに比例する。このときの比例係数をCとすると、背景光をPbとして
P=CPsσ+Pb
となる。
一定の光強度Ps1で照射した場合の計測光強度をPmax、光強度0とした場合の計測光強度をPminとすると、
Pmax=CPs1σ+Pb
Pmin=Pb
背景光を除いた真の計測光強度をPxとし、規格化光強度をPnorm=(KP−Pmin)/(Pmax−Pmin)を求めると、
P=CPxσ+Pb
Pnorm=K(P−Pmin)/(Pmax−Pmin)
=KPx/Ps1
Pxの最大値をPxmaxとすると、
K=Ps1/Pxmax
とすればPnormを0から1に規格化できる。改めてPnormを計測光強度として距離判定に用いれば、測定物体20の反射率や背景光の影響なく形状計測できる。
このように、一定光量の撮像光強度と背景光の光強度で、計測した光強度を規格化することで、撮像される光強度が測定物体の反射率に依存しにくいため、測定物体20の反射率に依存した距離誤差を低減できる。
照明手段21や撮像手段22は、なるべく入手し易く低コストの部品で作れることが望ましい。照射手段21を、レーザダイオードや発光ダイオードなどの半導体光源、撮像手段22を、光シャッタ付きのCCCD素子、またはCMOS素子とすれば、容易に第3の実施の形態の第1の変形例の形状測定装置を構成することができる。
レーザダイオードと外部に光シャッタを設けたCCDまたはCMOSアレイによる構成は第1の実施の形態で既に述べた。最近のLSIは簡単な回路であれば10GHzを越すクロックでも動作するので、光シャッタ24をCMOS基板に内蔵した光電流のシャッタ回路としてもよい。
照射手段21を半導体光源、撮像手段22を光シャッタ付きのCCCD素子、またはCMOS素子とすることで、入手し易く高速応答可能な素子で装置を構成でき、システムコストを低減できる。
撮像手段22で光量を測定する場合、計測周期数を増やすことで光量を確保することは第1の実施の形態の説明で述べたが、受光素子自体を高速高感度にする方法もある。この第3の実施の形態の第2の変形例では受光素子として電子増倍作用を持ったイメージインテンシファイア(製造元は浜松ホトニクス社など)を用いる。
この素子は高速のゲート機能を持つため、光シャッタ24を兼用できる点もメリットである。高感度に光強度を計測できるため、計測周期数を増やす必要もなく、全体の形状計測時間を低減することにつながる。
このように、照射手段21を半導体光源、撮像手段22を、電子増倍作用を持ったイメージインテンシファイアとすることで、撮像手段22を高速・高感度化しているので、距離誤差を低減できる。
第3の実施の形態の第2の変形例の形状測定装置では、第1の実施の形態に加え、照射手段21の光源を赤外光源とし、撮像手段22に可視光を除去する光(赤外線)フィルタ27を設けることを特徴とする。
図3に示すように、光源として赤外レーザダイオードを用い、光シャッタ24に赤外線を透過する赤外線フィルタ27を設けることで、ノイズになる外部からレンズに入射する可視光を除去し、光強度計測の誤差を低減できる。
照射手段21の光源を赤外光源とし、撮像手段22に可視光を除去する光フィルタ27を設けることで、外乱光を除去でき、光量誤差に起因する距離誤差を低減できる。
図4において、図1と同一部分には同一符号を付してとくに必要以外の説明は省略する。
第4の実施の形態の形状測定装置Aでは、第3の実施の形態の第2の変形例に加え、照射手段21の光源を赤外光源とし、撮像手段22に赤外光と可視光を分離する第2のハーフミラー28を設け、分離した赤外光から形状を測定し、可視光から形状に貼り付けるテキスチャデータを得るようにしている。
第3の実施の形態の第2の変形例の光フィルタとして、第2のハーフミラー28を新たに設け、この第2のハーフミラー28は可視光を反射するようにする。反射した可視光は第2のレンズ29で第2の受光素子アレイ30に結像され、可視のテキスチャ画像として撮像する。
赤外レーザダイオードとレンズ23と光シャッタ24と受光素子アレイ22により形状計測を行う点は、第3の実施の形態の第2の変形例と同じである。レンズ23と第2レンズ29の光学中心は、ミラーで折り曲げられているだけで、光学的に同じ位置にあるため、受光素子アレイ22および第2の受光素子アレイ30の画素ごとにテキスチャ画像と距離画像の対応を付けることができる。
このように、赤外光・可視光の分離ミラーを利用して赤外光から形状を測定し、可視光から形状に貼り付けるテキスチャデータを得ることで、形状測定とテキスチャ画像取得を異なる波長の光で行うので、形状測定とテキスチャ画像取得を同時に行える。
21 照射手段(レーザダイオード)
22 撮像手段(受光素子アレイ)
23 撮像手段(レンズ)
24 撮像手段(光シャッタ)
25 ハーフミラー
26 反射板(参照ミラー)
27 赤外線フィルタ
28 第2のハーフミラー
29 第2のレンズ
30 第2の受光素子アレイ
Claims (8)
- 測定物体に照射パターンを照射する照射手段と、前記測定物体表面で反射された撮像パターンを得る前記照射手段と光学的に同じ位置にある撮像手段とを備え、前記撮像パターンから前記測定物体の表面形状を得る形状測定装置において、前記測定物体は前記照射手段から距離L1からL2(L2>L1とする)の範囲に存在し、bを2以上の整数、m=1,...n, nは正の整数、cを光速とした場合、前記照射パターンはL1とL2の時間遅延tp=2(L2−L1)/cをbm分割し、かつ各分割時間の間にレベル0からb−1の一定で離散的な光強度を採るtpを周期とする多値光パルス列であり、前記mを1からnまで変化させながら前記撮像手段は距離L1にある前記測定物体からの反射光が前記撮像手段に戻る時間t1のタイミングで撮像パターンの光強度を各mについて計測し、前記各mについて計測された光強度をb値化したn種類のコードから、前記測定物体の距離を求めることを特徴とする形状測定装置。
- 前記照射パターンは、bが2であり、m=1の場合は{0,1}、m=2の場合は{0,1,0,1}と、1と0が交互に繰り返されることを特徴とする請求項1に記載の形状測定装置。
- 前記照射パターンは、bが2であり、いわゆるグレーコードであることを特徴とする請求項1に記載の形状測定装置。
- 前記照射手段の前方の距離Loに半透明の反射板を設け、この反射板から戻る反射光の戻り時間toから、撮像に対する照射の遅れtdをtd=to−2Lo/c(cは光速)で求めて遅れを補正することを特徴とする請求項1に記載の形状測定装置。
- 前記照射手段は、レーザダイオードや発光ダイオードなどの半導体光源であり、前記撮像手段は、光シャッタつきのCCCD素子、またはCMOS素子であることを特徴とする請求項1に記載の形状測定装置。
- 前記照射手段は、レーザダイオードや発光ダイオードなどの半導体光源であり、前記撮像手段は電子増倍作用を持ったイメージインテンシファイアであることを特徴とする請求項1に記載の形状測定装置。
- 前記照射手段の光源を赤外光源とし、前記撮像手段に可視光を除去する光フィルタを設けることを特徴とする請求項1に記載の形状測定装置。
- 前記照射手段の光源を赤外光源とし、前記撮像手段に赤外光と可視光を分離する第2のミラーを設け、分離した赤外光から形状を測定し、可視光から形状に貼り付けるテキスチャデータを得ることを特徴とする請求項7に記載の形状測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005165270A JP4673674B2 (ja) | 2005-06-06 | 2005-06-06 | 形状測定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005165270A JP4673674B2 (ja) | 2005-06-06 | 2005-06-06 | 形状測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006337309A JP2006337309A (ja) | 2006-12-14 |
| JP4673674B2 true JP4673674B2 (ja) | 2011-04-20 |
Family
ID=37557982
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005165270A Expired - Fee Related JP4673674B2 (ja) | 2005-06-06 | 2005-06-06 | 形状測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4673674B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017133853A (ja) | 2016-01-25 | 2017-08-03 | 株式会社リコー | 測距装置 |
| EP3273681B1 (en) | 2016-06-08 | 2020-06-17 | Panasonic Intellectual Property Management Co., Ltd. | Projection system |
| JP6855746B2 (ja) | 2016-10-18 | 2021-04-07 | 株式会社リコー | 測距装置、監視カメラ、3次元計測装置、移動体、ロボット及び測距方法 |
| JP6848364B2 (ja) | 2016-11-10 | 2021-03-24 | 株式会社リコー | 測距装置、移動体、ロボット、3次元計測装置、監視カメラ及び測距方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05273352A (ja) * | 1991-09-09 | 1993-10-22 | Dornier Luftfahrt Gmbh | 距離像を発生する方法および装置 |
| JPH109834A (ja) * | 1996-06-19 | 1998-01-16 | Olympus Optical Co Ltd | 3次元画像入力装置 |
| JPH10508736A (ja) * | 1994-11-14 | 1998-08-25 | ライカ アーゲー | 強度変調された照射野の検出及び復調のための装置及び方法 |
| JP2000074637A (ja) * | 1998-08-28 | 2000-03-14 | Fuji Xerox Co Ltd | 三次元形状計測法および装置 |
| JP2003307407A (ja) * | 2002-02-06 | 2003-10-31 | Eastman Kodak Co | スキャナを用いないカラー逐次距離画像化システム用の方法及び装置 |
| JP2005510697A (ja) * | 2001-11-27 | 2005-04-21 | カリダス プレシジョン システムズ ゲーエムベーハー | 立体物形状検出方法及びその装置 |
-
2005
- 2005-06-06 JP JP2005165270A patent/JP4673674B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05273352A (ja) * | 1991-09-09 | 1993-10-22 | Dornier Luftfahrt Gmbh | 距離像を発生する方法および装置 |
| JPH10508736A (ja) * | 1994-11-14 | 1998-08-25 | ライカ アーゲー | 強度変調された照射野の検出及び復調のための装置及び方法 |
| JPH109834A (ja) * | 1996-06-19 | 1998-01-16 | Olympus Optical Co Ltd | 3次元画像入力装置 |
| JP2000074637A (ja) * | 1998-08-28 | 2000-03-14 | Fuji Xerox Co Ltd | 三次元形状計測法および装置 |
| JP2005510697A (ja) * | 2001-11-27 | 2005-04-21 | カリダス プレシジョン システムズ ゲーエムベーハー | 立体物形状検出方法及びその装置 |
| JP2003307407A (ja) * | 2002-02-06 | 2003-10-31 | Eastman Kodak Co | スキャナを用いないカラー逐次距離画像化システム用の方法及び装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006337309A (ja) | 2006-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6817387B2 (ja) | Ladarシステム及び方法 | |
| CN110596721B (zh) | 双重共享tdc电路的飞行时间距离测量系统及测量方法 | |
| CN111025317B (zh) | 一种可调的深度测量装置及测量方法 | |
| CN109521435B (zh) | 距离计测装置 | |
| JP6246131B2 (ja) | タイムオブフライト信号の処理における又はこれに関する改良 | |
| US11561085B2 (en) | Resolving multipath interference using a mixed active depth system | |
| US9316735B2 (en) | Proximity detection apparatus and associated methods having single photon avalanche diodes for determining a quality metric based upon the number of events | |
| CN101449181B (zh) | 测距方法和用于确定目标的空间维度的测距仪 | |
| US7834985B2 (en) | Surface profile measurement | |
| CN110596725B (zh) | 基于插值的飞行时间测量方法及测量系统 | |
| CN110596722A (zh) | 直方图可调的飞行时间距离测量系统及测量方法 | |
| US6741082B2 (en) | Distance information obtaining apparatus and distance information obtaining method | |
| CN111025318B (zh) | 一种深度测量装置及测量方法 | |
| EP2594959B1 (en) | System and method for multi TOF camera operation using phase hopping | |
| JP5655133B2 (ja) | 空間情報検出装置 | |
| JP2010504509A (ja) | シーン(情景)の3d画像を捕捉する方法及びシステム | |
| CN108139483A (zh) | 用于确定到对象的距离的系统和方法 | |
| CN111025321B (zh) | 一种可变焦的深度测量装置及测量方法 | |
| JP2008533478A (ja) | 3−d撮像システム | |
| JP6261681B2 (ja) | タイムオブフライト信号の処理における又はこれに関する改良 | |
| US20200404246A1 (en) | Time-of-flight image sensor resolution enchantment and increased data robustness using a binning module | |
| JP2008249673A (ja) | 測距装置、測距方法及び測距システム | |
| JP2006337286A (ja) | 形状計測装置 | |
| JP4673674B2 (ja) | 形状測定装置 | |
| CN111025319B (zh) | 一种深度测量装置及测量方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080520 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20080528 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100813 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100824 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101022 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101109 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110118 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110121 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140128 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |