WO2012086207A1 - 超音波診断装置および超音波診断装置の制御方法 - Google Patents
超音波診断装置および超音波診断装置の制御方法 Download PDFInfo
- Publication number
- WO2012086207A1 WO2012086207A1 PCT/JP2011/007208 JP2011007208W WO2012086207A1 WO 2012086207 A1 WO2012086207 A1 WO 2012086207A1 JP 2011007208 W JP2011007208 W JP 2011007208W WO 2012086207 A1 WO2012086207 A1 WO 2012086207A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- diagnostic apparatus
- predetermined
- probe
- ultrasonic diagnostic
- processing
- Prior art date
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/54—Control of the diagnostic device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0891—Detecting organic movements or changes, e.g. tumours, cysts, swellings for diagnosis of blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
- A61B8/145—Echo-tomography characterised by scanning multiple planes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4444—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4483—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer
- A61B8/4488—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer the transducer being a phased array
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5207—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of raw data to produce diagnostic data, e.g. for generating an image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5223—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for extracting a diagnostic or physiological parameter from medical diagnostic data
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/30—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for calculating health indices; for individual health risk assessment
Definitions
- the present invention relates to an ultrasonic diagnostic apparatus and a method for controlling the ultrasonic diagnostic apparatus.
- the ultrasonic diagnostic apparatus can acquire a tomographic image inside the body of a subject and is widely used for observing the shape of a body tissue.
- it is also used to measure the intima-media thickness of the carotid artery (Initima-MediaMThickness, hereinafter abbreviated as IMT), which is an important index for knowing the initial atherosclerosis.
- IMT is the thickness of the intima-media complex of the carotid vascular wall and is visible between the vascular lumen 201 and the adventitia 202 as shown in FIGS. 11 (a) and (b) This refers to the thickness of the layer (inner film 203).
- the ultrasonic diagnostic apparatus includes a boundary between the blood vessel lumen 201 and the intima (hereinafter referred to as a lumen-intima boundary 204) and a boundary between the media and the outer membrane 202 (hereinafter referred to as a media-media boundary 205). And the distance between the boundaries is measured as IMT.
- an IMT measurement range 206 is set along the direction of blood vessel elongation of the carotid artery (hereinafter referred to as the major axis direction), and the maximum thickness (maxIMT) during this period is set.
- the average thickness (meanIMT) is measured as an IMT value.
- Non-Patent Document 1 recommends that the IMT measurement range 206 be set to 1 cm on the distal side (head side) of the common carotid artery 207 (CCA) among the carotid arteries.
- the right side of the dotted line L is the common carotid artery
- the recommended IMT measurement range 208 shown in FIG. 11B is a recommended IMT measurement range.
- Patent Document 1 discloses an ultrasonic diagnostic apparatus that automatically measures IMT.
- the ultrasonic diagnostic apparatus disclosed in Patent Document 1 calculates the reliability of IMT measurement in a region set by a region setting unit that sets a region for evaluating the reliability of blood vessel IMT measurement, and the region set by the region setting unit.
- a reliability calculation unit that displays the reliability of the IMT measurement on the display unit, and an IMT measurement unit that automatically measures the IMT in the region set by the region setting unit.
- an example of IMT measurement using the ultrasonic diagnostic apparatus disclosed in Patent Document 2 will be described.
- the probe transmits and receives ultrasonic waves in the vicinity of the center of a cross section (hereinafter referred to as a short-axis cross section) perpendicular to the long axis direction of the blood vessel (the direction in which the blood vessel extends). Correct measurement is not possible unless the intima boundary 204 and the medial epicardial boundary 205 are clearly depicted. Therefore, the operator first places the probe on the neck surface of the subject and transmits and receives ultrasonic waves in the vicinity of the center of the short-axis cross section of the blood vessel in the carotid artery. The position and direction of the probe surface, which is the surface for transmitting and receiving signals, are adjusted.
- a recommended IMT measurement range 208 (the region set by the region setting means in Patent Document 1) shown in FIG. 11B is set.
- the setting position of the IMT measurement range is closer to the right side than the recommended position as shown in the IMT measurement range 206 of FIG. 11A, for example.
- the operator uses the operation means (area setting means) for setting the position of the IMT measurement range such as a trackball or a touch panel to the position of the recommended IMT measurement range 208 in FIG. Move the range.
- the IMT measurement is automatically performed and the IMT value is calculated by satisfying a predetermined condition. .
- the calculated IMT is displayed on the display unit.
- the tomographic image displayed on the display unit is updated even after the completion of the IMT measurement, and the latest tomographic image is continuously displayed.
- the displayed tomographic image is different from the tomographic image obtained when the IMT is obtained, the IMT and the tomographic image do not correspond to each other, and the operator can correctly measure the IMT based on the information displayed on the display unit. It may be difficult to determine whether or not
- the latest measurement state is not appropriate for measurement.
- the IMT is displayed on the display unit, which may cause the operator to feel uncomfortable. Moreover, when measurement continues, even if IMT is displayed, it is conceivable that it is difficult to determine when the measurement may be terminated.
- Such a problem may occur not only in IMT measurement but also in cases where it is desired to obtain a predetermined tissue length or the like in various in-vivo diagnoses or to obtain a high-definition tomographic image.
- An object of the present invention is to solve at least one of the problems of the prior art and to provide a method for controlling an ultrasonic diagnostic apparatus and an ultrasonic diagnostic apparatus that are excellent in operability.
- the ultrasonic diagnostic apparatus of the present invention is an ultrasonic diagnostic apparatus to which a probe having a transducer can be connected, and includes a transmission process for driving the probe to transmit ultrasonic waves to a subject, and the probe.
- a reception process that generates a reception signal based on reflected ultrasound from the subject received by the toucher, and when a predetermined condition based on the reception signal is satisfied, at least the transmission process and the reception process
- a controller that performs an automatic freeze process for stopping any one of them is provided, and the controller suppresses the automatic freeze process for a predetermined period after receiving a predetermined operation event.
- the ultrasonic diagnostic apparatus control method of the present invention is an ultrasonic diagnostic apparatus control method to which a probe having a transducer can be connected, and transmits the ultrasonic wave by driving the probe.
- a fourth step of performing the automatic freeze processing is an ultrasonic diagnostic apparatus control method to which a probe having a transducer can be connected, and transmits the ultrasonic wave by driving the probe.
- the ultrasonic diagnostic apparatus of the present invention is an ultrasonic diagnostic apparatus to which a probe having a transducer can be connected, and a transmission process for sequentially transmitting ultrasonic waves to a subject by driving the probe.
- An ultrasonic transmission / reception processing unit that sequentially generates a reception signal based on reflected ultrasonic waves from the subject received by the probe; and a tomogram is sequentially constructed based on the reception signal;
- a vascular wall thickness calculation unit that calculates the thickness, a pulsation detection unit that determines whether the pulsation state of the blood vessel has been correctly detected, and outputs a signal at a predetermined timing during one heartbeat of the subject; Determination of the tomographic image processing unit and the pulsation detection
- An image compositing unit that generates image data to be displayed on the unit, and a stop of the ultrasonic wave transmission process, a stop of the ultrasonic wave reception process, and the constructed tomographic image based on the signal indicating the reliability
- An ultrasonic transmission / reception processing unit and a control unit that controls the image synthesis unit are provided so as to perform at least one of stationary.
- an automatic freeze process for stopping at least one of the transmission process and the reception process is performed.
- the diagnosis when the length of a predetermined tissue is automatically measured or when a high-definition ultrasonic image is obtained, the measurement is terminated. For this reason, when desired measurement etc. are performed automatically, a favorable operation feeling can be obtained.
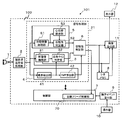
- FIG. 1 is a block diagram showing an embodiment of an ultrasonic diagnostic apparatus according to the present invention.
- FIG. 2 is a detailed block diagram of the ultrasonic diagnostic apparatus shown in FIG. 1.
- (A) And (b) is a figure which shows the positional relationship of the probe arrange
- (A) is typical sectional drawing which shows the long-axis cross section of a carotid artery
- (b) is a figure which shows the time change waveform of the internal diameter of the carotid artery by the discharge of the blood from a heart.
- 2 is a flowchart showing the operation of the ultrasonic diagnostic apparatus shown in FIG.
- FIG. 1 It is a figure which shows the internal diameter change waveform of a carotid artery in detail.
- A is a figure which shows the correlation with the model waveform of a carotid artery, and an internal diameter change waveform
- (b) is a figure which shows the method of extending the model waveform of a carotid artery on a time-axis. It is a figure which shows the relationship between the internal diameter change waveform of a blood vessel, the change waveform of an IMT value, and an ECG waveform. It is a figure which shows the internal diameter change waveform of the case where the blood vessel is caught correctly, and the case where it is not so.
- A) And (b) is a figure which shows the example of the change method of the reference value of determination of whether to freeze automatically.
- A) And (b) is a figure explaining the structure of a carotid artery, and the measurement range of IMT.
- FIG. 1 is a block diagram of the ultrasonic diagnostic apparatus according to the present embodiment.
- the ultrasonic diagnostic apparatus 101 includes a controller 100.
- the controller 100 includes an ultrasonic transmission / reception processing unit 2, a signal processing unit 21, a control unit 7, a cine memory 8, an operation event receiving unit 9, and an image composition unit 11.
- the ultrasonic diagnostic apparatus 101 does not include the probe 1 and a general-purpose probe 1 can be connected.
- the ultrasonic diagnostic apparatus 101 may include the probe 1.
- the ultrasonic transmission / reception processing unit 2, the operation event receiving unit 9, the cine memory 8, and the image composition unit 11 are realized by, for example, known hardware using various electronic components.
- the signal processing unit 21 may be configured by software or hardware.
- the reception signal generated by the signal processing unit 21 is preferably a digital signal.
- the control unit 7 includes an arithmetic unit such as a microcomputer and software.
- the ultrasonic transmission / reception processing unit 2 is configured such that the probe 1 is detachable.
- the probe 1 has an ultrasonic transducer, transmits ultrasonic waves to the subject using the ultrasonic transducers, receives reflected ultrasonic waves from the subject, and converts them into electrical signals.
- the ultrasonic transmission / reception processing unit 2 supplies a driving pulse to the ultrasonic transducer of the probe 1 at a predetermined timing, and performs transmission processing for driving the probe 1 to transmit ultrasonic waves. In addition, it receives reflected ultrasound, receives the converted electrical signal from the probe 1, and performs reception processing necessary for constructing an ultrasonic tomographic image such as amplification and detection of the electrical signal. Generate a signal.
- the ultrasonic diagnostic apparatus 101 transmits a plurality of ultrasonic waves and scans an area for obtaining a tomographic image with ultrasonic waves in order to obtain a tomographic image inside the body of the subject in a measurement area including an area where IMT measurement is performed. To do.
- a reception signal for obtaining a tomographic image for one frame is obtained.
- tomographic images for several frames to several tens of frames are generated per second.
- the ultrasonic transmission / reception processing unit 2 repeatedly performs transmission processing for one frame continuously, and sequentially generates corresponding reception signals. For this reason, the following processing is sequentially performed on the generated reception signal.
- the signal processing unit 21 receives the reception signal generated by the ultrasonic transmission / reception processing unit 2, and performs processing such as generation of an ultrasonic image, detection of a measurement target, and calculation of a measurement value.
- the signal processing unit 21 preferably includes a tomographic image processing unit 3, a blood vessel wall thickness calculation unit 4, a pulsation detection unit 5, and a reliability determination unit 6.
- the tomographic image processing unit 3 receives the reception signal generated by the ultrasonic transmission / reception processing unit 2 and performs coordinate conversion of the reception signal to construct an ultrasonic image.
- a tomographic image in the body of a subject which is a two-dimensional image using ultrasound, is sequentially constructed.
- the tomographic image is obtained, for example, by generating a luminance signal corresponding to the amplitude of the received signal, that is, the signal intensity.
- the position and direction of the probe surface of the probe 1 applied to the subject are appropriate, and the short-axis cross section of the blood vessel whose measurement target is the ultrasonic wave transmitted from the probe 1 It is determined whether it is propagating in the vicinity of the center.
- the blood vessel wall thickness calculation unit 4 calculates the thickness of the blood vessel wall of the blood vessel that is the IMT of the subject to be measured, as will be described in detail below.
- the pulsation detection unit 5 detects and determines whether or not the pulsation state of the blood vessel has been correctly detected. Further, a signal is output at a predetermined timing during one heartbeat. This signal is used as a reference time for IMT measurement.
- the reliability determination unit 6 determines whether the observation state is appropriate when measuring the wall thickness of the blood vessel to be measured, or whether the measurement value is reliable as the measurement result. The determination is based on the output from the pulsation detection unit 5, that is, the determination obtained from the tomographic image processing unit 3 and the determination obtained from the pulsation detection unit 5. That is, the reliability determination unit 6 can determine whether the observation state performed by the tomographic image processing unit 3 and the pulsation detection unit 5 based on the received signal is appropriate, or whether the measurement value can be trusted as a measurement result. Judge whether the condition of whether or not is satisfied. Further, the IMT value is received from the blood vessel wall thickness calculation unit 4. The determination result is output together with the measured value of IMT as a signal indicating the reliability of the IMT value.
- the cine memory 8 receives the IMT value and the signal indicating the reliability from the reliability determination unit 6 and stores them together with the tomographic image signal formed by the tomographic image processing unit 3. In FIG. 1, illustration and description are omitted, but the reception signal generated by the ultrasonic transmission / reception processing unit 2 may be stored in the cine memory 8.
- the operating device 10 is a device for an operator to operate the ultrasonic diagnostic apparatus 101, and includes an operation panel, a trackball, a keyboard, a mouse, a touch panel, and the like.
- the operation event reception unit 9 receives an event of an operation performed by the operator using the operation device 10 and notifies the control unit 7 of the event.
- the control unit 7 receives an operation event from the operation event receiving unit 9 and controls each block. Further, the control unit 7 includes an automatic freeze control unit 70, and the automatic freeze control unit 70 performs an operation for automatically setting the freeze state automatically, that is, directly by the operator based on the determination result of the reliability determination unit 6. The measurement result is determined as the IMT value by performing control to shift to the freeze state without any change. In addition, the automatic freeze control unit 70 controls the automatic freeze to be suppressed only for a certain period after the operation event reception unit 9 receives a predetermined operation event.
- the freeze state generally refers to a state in which ultrasound transmission / reception processing is stopped and an image to be displayed is stationary in the field of ultrasound diagnostic apparatuses.
- the suppression of the automatic freeze includes not only automatically shifting to the freeze state but also invalidating the shift to the automatic freeze state.
- the measurement result is confirmed as an IMT value, and at least one of the stop of the ultrasonic transmission processing, the stop of the ultrasonic reception processing, and the stillness of the displayed image is performed, thereby displaying the displayed tomogram. Since the image matches the tomographic image obtained when the IMT is obtained, the operator does not feel uncomfortable, and the operator can easily recognize the timing of the end of the measurement, so that excellent operability without discomfort can be realized. .
- the image synthesizing unit 11 is configured so that the display 12 can be connected, and the measurement result determined by the reliability determining unit 6 and the tomographic image signal configured by the tomographic image constructing unit 31 are connected.
- the display 12 is combined so that it can be displayed.
- the display 12 is a monitor that is connected to the image composition unit 11 and displays the image signal.
- FIG. 2 is a block diagram showing a more detailed configuration of the ultrasonic diagnostic apparatus 101 shown in FIG.
- the structure of the ultrasonic diagnostic apparatus 101 will be described in more detail with reference to FIG. The description of the configuration described in FIG. 1 is omitted.
- the blood vessel wall thickness calculation unit 4 includes a boundary detection unit 41 and an IMT calculation unit 42.
- the boundary detection unit 41 is based on the received signal obtained from the ultrasonic transmission / reception processing unit 2 and within the lumen of the blood vessel to be measured in a range including the IMT measurement range (see FIGS. 11A and 11B).
- Two types of blood vessel boundaries are detected: a membrane boundary 204 and a media-outer membrane boundary 205.
- the IMT calculation unit 42 calculates the distance between the lumen-intima boundary 204 and the media-epicardium boundary 205 detected by the boundary detection unit 41 as an IMT value.
- maxIMT maxIMT is calculated, and if the average value is taken, meanIMT is calculated, and this maxIMT or meanIMT is calculated as the final IMT value.
- the present invention is not limited to these, and various statistical processes may be performed using a plurality of IMT values measured in the IMT measurement range, and the obtained values may be output.
- the tomographic image processing unit 3 includes a tomographic image constructing unit 31 and a blood vessel center determining unit 32.
- the tomographic image constructing unit 31 constructs a tomographic image based on the received signal.
- the blood vessel center determination unit 32 converts the lumen-intima boundary 204 and the media intima into a tomogram at the position of the blood vessel boundary. It is evaluated whether or not the boundary 205 is clearly depicted, the length of the portion in which the lumen-intima boundary 204 and the media-to-media boundary 205 are clearly depicted in the tomographic image, and the like.
- the blood vessel center determination unit 32 determines the characteristics of the received signal that constitutes the signal of the tomographic image, that is, the signal intensity (or luminance) and the signal intensity (or luminance). It means that the evaluation is performed based on at least one of the distributions. It also means evaluating the shape feature of the blood vessel boundary position. Thereby, the position and direction of the probe surface of the probe 1 applied to the subject are appropriate, and the ultrasonic wave transmitted from the probe 1 propagates near the center of the short-axis cross section of the blood vessel to be measured. Determine whether or not.
- the pulsation detection unit 5 includes a pulsation information processing unit 51, a pulsation determination unit 52, and a heartbeat period detection unit 53.
- the pulsation information processing unit 51 extracts information for determining whether or not the blood vessel to be measured is pulsating from the reception signal generated by the ultrasonic transmission / reception processing unit 2.
- the pulsatility determination unit 52 determines whether or not the blood vessel is pulsating from the information processed and extracted by the pulsation information processing unit 51.
- the heartbeat period detection unit 53 detects a specific timing in the heartbeat from the information processed and extracted by the pulsation information processing unit 51. For example, the end diastole, which is the timing at which the heart expands after contraction and the blood flow is minimized, is detected.
- the determination performed by the pulsation detection unit 5 including the blood vessel center determination unit 32, the pulsation information processing unit 51, the pulsatility determination unit 52, and the heartbeat period detection unit 53 is for accurately and reproducibly measuring the IMT value. Whether or not the following two conditions are satisfied is shown.
- the first condition is that both the luminal intima boundary 204 and the medial epicardial boundary 205 of the blood vessel are clearly depicted.
- the blood vessel center determination unit 32 determines whether or not both the boundaries are clearly depicted.
- the IMT value is obtained by detecting the lumen intima boundary 204 and the medial epicardial boundary 205 of the blood vessel and measuring the thickness thereof. Therefore, unless both boundaries are clearly depicted, the IMT value cannot be measured accurately and reproducibly.
- the position and direction of the probe surface of the probe 1 applied to the subject are appropriate, and the ultrasonic wave transmitted from the probe 1 is a short-axis cross section of the blood vessel. It is necessary to propagate near the center. That is, since the short-axis cross section of the blood vessel is substantially circular, the probe 1 must be arranged so that ultrasonic waves are transmitted through the center of this circular shape. This point will be described in detail with reference to FIG.
- FIG. 3 is a diagram showing a positional relationship between the probe 1 arranged on the subject and the short-axis cross section of the blood vessel.
- FIG. 3A shows the probe surface of the probe 1 applied to the subject. This shows a state in which the position and direction of are appropriate. In this case, the path of the ultrasonic echo transmitted from the probe 1 and reflected by the tissue in the body, that is, the acoustic line passes near the center of the short-axis cross section of the blood vessel. This state is also referred to as “the probe grasps the vicinity of the center of the short-axis cross section of the blood vessel”.
- the ultrasonic echo is reflected at a boundary where there is a difference in acoustic impedance, such as a tissue boundary, but is reflected more strongly as it is perpendicular to the boundary surface, and a clear reflected echo signal is obtained. Therefore, in the state shown in FIG. 3A, strong and clear reflected echoes are obtained at both the inner lumen boundary 204 and the outer media boundary 205.
- FIG. 3 (b) shows a state in which the probe surface of the probe 1 applied to the subject is in the proper direction but the position is not appropriate.
- the acoustic line of the ultrasonic echo transmitted and received by the probe 1 does not pass near the center of the short-axis cross section of the blood vessel.
- FIG. 3B since the ultrasonic echo is not perpendicular to both boundaries of the blood vessel, only a weak and unclear reflection echo can be obtained. For this reason, the lumen-intima boundary 204 and the media-media outer membrane boundary 205 are depicted without being blurred or separated, or the lumen-intima boundary is not depicted.
- the probe 1 is in a state of capturing the vicinity of the center of the short-axis cross section of the blood vessel. In addition, it is necessary to appropriately adjust the position and direction of the probe surface of the probe 1.
- the blood vessel center determination unit 32 determines that the first condition is satisfied as described above. Specifically, at the position of the blood vessel boundary, the probe 1 applied to the subject is evaluated by evaluating whether or not the lumen intima boundary 204 and the medial epicardial boundary 205 are clearly depicted in the tomographic image. It is determined that the vicinity of the center of the short-axis cross section of the blood vessel is captured.
- the intravascular region at the detected position of the lumen intima boundary 204 is shown. Whether there is a rise in luminance from the cavity 201 side to the intima 203 side, whether there is a rise in luminance from the intima 203 side to the outer membrane 202 side at the detected media-outer membrane boundary 205 position, and By evaluating whether or not there is a drop in luminance between the detected lumen intima boundary 204 position and medial epicardial boundary 205 position, the tomographic image shows the lumen intima boundary 204 and medium in the position of the blood vessel boundary. It is determined whether or not the epimembrane boundary 205 is clearly depicted. Thereby, it is confirmed whether or not the first condition is satisfied.
- the vicinity of the center of the short-axis cross section of the blood vessel in which the above-described two kinds of boundaries are clearly depicted is, for example, a shift in the direction perpendicular to the acoustic line shown in FIG. Within about 5mm.
- this value is not strictly limited because it depends on the subject, the measurement accuracy of the ultrasonic diagnostic apparatus, measurement conditions, and the like.
- the length of the portion where the lumen inner membrane boundary 204 and the media outer membrane boundary 205 are clearly depicted in the tomographic image is indicated by the probe 1 applied to the subject as the minor axis of the blood vessel. It can also be used to determine whether or not the vicinity of the center of the cross section is captured.
- the above-described two kinds of boundaries are clearly depicted in the entire IMT measurement range (see FIGS. 11A and 11B) or at a certain ratio or more. . More specifically, for example, when the IMT measurement range is 1 cm and the above-mentioned certain ratio is 75% or more, two types of boundaries are clearly depicted in a range of 7.5 mm or more of 1 cm. If it is determined that the center of the blood vessel is captured, it is confirmed that the first condition is satisfied.
- the second condition is to measure IMT that fluctuates according to the change in heartbeat at a predetermined timing.
- the predetermined timing is a state in which the heartbeat is detected by the heartbeat period detection unit 53, and blood vessel information can be correctly measured from the information processed and extracted by the pulsation information processing unit 51 by the pulsatility determination unit 52 Determine whether.
- the blood vessel expands and contracts according to the amount of blood flow and the flow velocity flowing through it, and the thickness of the blood vessel wall changes. For this reason, the IMT value also changes depending on the measurement timing. Therefore, unless the IMT measurement is performed at a predetermined timing, the IMT value cannot be measured accurately and reproducibly.
- FIG. 4A shows a cross section of the carotid artery in the long axis direction (hereinafter referred to as a long axis cross section), and FIG. 4B shows the time of the inner diameter of the carotid artery due to blood pumping from the heart. A change waveform is shown.
- the inner diameter of the blood vessel in this systole (the distance between the two points A and B of the front wall and B shown in FIG. 4 (a)) is As it increases, the vessel wall thickness decreases.
- the blood flow rate is slowed and the blood pressure is lowered, so that the inner diameter of the blood vessel in the diastole is reduced and the thickness of the blood vessel wall is increased. Therefore, since the thickness of the blood vessel wall changes in synchronization with the heartbeat, the IMT value also changes depending on the timing of measurement. Further, the inner wall of the blood vessel changes with time due to the blood from the heart, and a pulse-like change waveform as shown in FIG. 4B is observed.
- FIG. 4 (b) also shows the ECG R-wave trigger timing normally used for detecting the end diastole of the heart.
- the ECG R-wave trigger timing As shown in FIG. 4B, immediately after the ECG R-wave trigger timing, the inner diameter of the blood vessel once decreases, then increases rapidly, and gradually returns to the original diameter. Therefore, the maximum thickness of the blood vessel wall in one heartbeat is the timing at which the inner diameter of the blood vessel is once reduced after a predetermined period from the end diastole of the heart.
- IMT measurement measurement when the thickness of the blood vessel wall becomes maximum is considered to be ideal. Therefore, for example, by performing IMT measurement at a predetermined timing in one heartbeat, such as performing IMT measurement at the timing when the thickness of the blood vessel wall becomes maximum, IMT measurement can be performed accurately and with good reproducibility. .
- the pulsation determination unit 52 determines the presence or absence of pulsation based on information generated by the pulsation information processing unit 51 using the received signal.
- the heartbeat period detection unit 53 detects and outputs a timing corresponding to a time after a predetermined period has elapsed from the above-described ECG R wave from the information processed and extracted by the pulsation information processing unit 51, for example. .
- the pulsation determination unit 52 outputs the result of determining the presence or absence of pulsation to the reliability determination unit 6 together with the signal indicating the above-described timing received from the heartbeat period detection unit 53.
- the configuration in which the heartbeat detection unit 53 detects the predetermined timing using the received signal has been described.
- the configuration may be such that the predetermined timing is detected using a normal ECG.
- the heartbeat detection unit 53 in FIG. 2 does not receive the information processed / extracted by the pulsation information processing unit 51 (that is, a path from the pulsation information processing unit 51 to the heartbeat detection unit 53 becomes unnecessary. ), An ECG is connected to the heartbeat period detection unit 53.
- the control unit 7 includes the automatic freeze control unit 70, and the automatic freeze control unit 70 performs control for automatically shifting to the freeze state based on the determination result of the reliability determination unit 6, and the measurement result is transferred to the IMT. Confirm as value. Since the IMT measurement can be performed by processing the received signal, the tomographic image does not have to be displayed on the display device 12 at this time. In this case, since the operator does not know that the state has changed to the frozen state, for example, an indication that the state has changed to the frozen state is displayed on the screen of the display device 12 with an icon or an alarm sound or the like. By providing the means, the operator can be notified of the transition to the freeze state. These notification means can also be used when displaying an image.
- FIG. 5 is a flowchart showing a typical operation of the ultrasonic diagnostic apparatus 101.
- step S101 the ultrasonic transmission / reception processing unit 2 performs transmission control and reception control of ultrasonic signals, and drives the probe 1 to transmit ultrasonic waves and reflect them on the subject.
- the reflected ultrasonic wave received in 1 is subjected to signal processing in the same manner as a general ultrasonic diagnostic apparatus to generate a received signal (received echo data).
- step S102 the tomographic image constructing unit 31 processes the received signal to construct a tomographic image.
- the various tomographic image data generated here are objects such as the internal organs of the subject.
- explanation will be made on the assumption that the image is processed mainly on the image of the blood vessel, particularly the carotid artery.
- the reception signal output from the ultrasonic transmission / reception processing unit 2 is also sent to the blood vessel wall thickness calculation unit 4 and the pulsation detection unit 5.
- step S103 the boundary detection unit 41 of the vascular wall thickness calculation unit 4 determines the luminal intima boundary 204 and the media intima based on the amplitude and phase of the received signal output from the ultrasound transmission / reception processing unit 2.
- the boundary 205 is detected, and the position information is output to the blood vessel center determination unit 32 and the IMT calculation unit 42. This is performed for each point within a preset target image range (ROI).
- ROI target image range
- the ROI is normally set in correspondence with the IMT measurement range (see FIGS. 11A and 11B).
- step S104 the IMT calculation unit 42 measures the thickness of the intima 203, that is, the IMT, from the position information of the lumen intima boundary 204 and the medial epicardial boundary 205 detected by the boundary detection unit 41. Calculate the value.
- step S ⁇ b> 105 the blood vessel center determination unit 32 receives the received signal of the blood vessel currently captured by the probe 1 from the tomographic image from the tomographic image construction unit 31 and the boundary position information obtained from the boundary detection unit 41. Is a received signal near the center of the blood vessel.
- the reception signal output from the ultrasonic transmission / reception processing unit 2 is also sent to the pulsation detection unit 5.
- step S106 the pulsation of the target blood vessel is detected by the pulsation detecting unit 5, and it is determined whether or not the waveform correctly captures the pulsation of the blood vessel.
- the pulsation information processing unit 51 sets measurement points A and B on the front wall and the rear wall of the target blood vessel, and analyzes the amplitude and phase of the received signal.
- the movement of the measurement points A and B is tracked. Since the artery repeats contraction and expansion due to the heartbeat, the distance between the measurement points A and B moves periodically as shown in FIG. 4B, and this is detected as a blood vessel inner diameter change waveform.
- a special connection between a device such as an electrocardiograph and the subject is not required, and a blood vessel inner diameter change waveform can be obtained by a simple operation of simply placing the probe on the subject.
- the pulsatility determination unit 52 evaluates whether or not the inner diameter change waveform obtained by the pulsation information processing unit 51 correctly captures the pulsation of the blood vessel, and whether or not the inner diameter change waveform is a pulse wave. Determine by doing.
- method (1) a method focusing on a simple feature amount of the inner diameter change waveform
- method (2) a method focusing on the degree of coincidence with the reference (model) waveform of the inner diameter change waveform
- FIG. 6 is a diagram showing in detail the inner diameter change waveform of the carotid artery.
- the pulsatility determination unit 52 determines whether the amplitude and peak timing are within a range that can be taken by a normal person based on the inner diameter change waveform of the carotid artery. The following are examples of the feature parameter used for the determination.
- Maximum amplitude and minimum amplitude A max and A min in FIG. ⁇ Timing of maximum amplitude (A max ): T max ⁇ Timing to reach minimum amplitude (A min ): T min - one heartbeat cycle: T R
- a max is 1mm weak
- a min is a negative value
- T R is approximately one second, if it is T min ⁇ T max, can be determined pulsatile Has been confirmed experimentally. Therefore, when all of these are satisfied, it can be determined that the pulse wave is present.
- FIG. 7A is a diagram showing the correlation between the carotid artery model waveform and the inner diameter change waveform
- FIG. 7B is a diagram showing a method of extending the carotid artery model waveform on the time axis. .
- a reference model waveform is created, and the degree of matching between the waveform and the measured inner diameter change waveform is determined by calculating a correlation coefficient.
- the model waveform is created in advance by collecting data on the inner diameter waveforms of a plurality of people.
- the correlation coefficient between the model waveform and the measured inner diameter change waveform is calculated.
- the model waveform and the measurement waveform are expanded and contracted on the time axis, and the correlation coefficient is calculated with the same time length.
- FIG. 7B shows a case where the measured waveform length is longer than the model waveform length. Since the model waveform and the period of the inner diameter change waveform of a subject, that is, one heartbeat period is almost the same, as shown in FIG. 7B, the model waveform is measured in the time direction based on the measured inner diameter change waveform. Extend and contract. Then, a correlation coefficient between the scaled model waveform and the measured inner diameter change waveform is calculated. For example, if the correlation coefficient is equal to or greater than a predetermined threshold, it is determined that the waveform is a pulse wave.
- FIG. 7B shows that the model waveform is expanded and contracted in the time direction based on the measured inner diameter change waveform when the model waveform and the one heartbeat period of the inner diameter change waveform of a subject do not match.
- the same effect can be obtained by expanding and contracting the measured inner diameter change waveform in the time direction with reference to the model waveform.
- the determination is based on the evaluation of the waveform.
- the timing of measurement is important as described above, and for that purpose, it is necessary to detect the timing of the end diastole. .
- the heartbeat period detection unit 53 receives the blood vessel inner diameter change waveform from the pulsation information processing unit 51, detects the time when the amplitude suddenly increases in the inner diameter change waveform, that is, the timing when the inner diameter suddenly increases, and this constant The timing before the time is the end of diastole.
- the IMT value becomes maximum at the timing near the end diastole, the IMT value can be measured at the optimum timing by detecting the end diastole timing.
- FIG. 8 shows the blood vessel inner diameter change waveform, IMT value change waveform, and ECG waveform along the time axis.
- the ideal timing at which the IMT value reaches the maximum value is a timing delayed by a predetermined time from the end diastole (corresponding to the R wave timing in the electrocardiogram) as shown in FIG.
- the timing for measuring the IMT value during one heartbeat does not necessarily need to be at the end of diastole, and it is versatile if an arbitrary timing can be detected according to the processing delay time and processing method. Will increase.
- FIG. 9 shows waveforms when blood vessels are correctly captured and not correctly captured in diagnosis.
- end diastole is detected at each end diastole timing point (from a to e), but points a, b, and c are in a state where a blood vessel is not correctly captured, and points d and e are blood vessels. It shows the state that is correctly captured.
- Points d and e show a state in which both pulsatility determination and end diastole detection by the evaluation of the inner diameter change waveform are correctly detected. Like points a, b, and c, blood vessels in diagnosis are shown. Even if a probe that is not in the last stage of diastole is detected, such as when the probe is moved to search for a blood vessel, it is determined that the blood vessel is not correctly captured by evaluating the inner diameter change waveform. Yes.
- the pulsatility determination unit 52 refers to both the evaluation result of the inner diameter change waveform detected by the pulsation information processing unit 51 and the end-diastolic timing detected by the heartbeat period detection unit 53, so that the blood vessel The accuracy of determining that the pulsation, that is, the blood vessel is correctly captured by the probe is improved.
- the reliability determination unit 6 evaluates the result determined by the blood vessel center determination unit 32 and the pulsation detected and determined by the pulsation detection unit 5, whereby the IMT calculation unit 42 performs the evaluation.
- the reliability of the calculated IMT value is determined.
- the reliability determination unit 6 determines the reliability of the IMT value based on whether or not the currently grasped blood vessel to be diagnosed is in an appropriate state for determining the IMT measurement result. The determination is performed based on the determination result in the blood vessel center determination unit 32 and the determination result in the pulsatility determination unit 52.
- the reliability determining unit 6 determines that the reliability of the IMT value is high. Further, when the pulsation determination unit 52 determines that the pulsation of the blood vessel is correctly captured, the reliability determination unit 6 determines that the reliability of the IMT value is high. When these are satisfied, the reliability determination unit 6 determines that there is sufficient reliability to determine the IMT measurement result.
- the pulsation determination unit 52 and the blood vessel center determination unit 32 may output a multivalue indicating the probability, instead of determining the reliability with two choices.
- the blood vessel center determination unit 32 calculates an evaluation value representing the probability that the position of the probe 1 captures the vicinity of the center of the blood vessel.
- the pulsation determination unit 52 calculates an evaluation value indicating the probability of correctly capturing the pulsation of the blood vessel.
- the reliability determination unit 6 calculates an evaluation value representing the reliability of the IMT value from the evaluation value calculated by the blood vessel center determination unit 32 and the evaluation value calculated by the pulsatility determination unit 52.
- the evaluation value calculated by the blood vessel center determination unit 32 is, for example, an evaluation value as the length of the portion where the above-described lumen intima boundary 204 and medial epicardial boundary 205 are clearly depicted is larger. Or the evaluation value increases as the rise or fall of the luminance of the tomographic image around the detected lumen-intima boundary 204 position or the media-endocardial boundary 205 position increases. You just have to decide.
- the evaluation value calculated by the pulsatility determination unit 52 may be determined such that the evaluation value increases as the correlation between the above-described model waveform and the measured inner diameter change waveform increases, for example.
- the determination can be made only by the result of the blood vessel center determination unit 32, or can be determined only by the result of the pulsatility determination unit 52. By referring to both determination results, the determination accuracy can be improved.
- the software can be appropriately selected according to the use of the apparatus, the cost, the amount of signal to be processed, and the signal processing capability of the controller 100. Is possible.
- step S108 the cine memory 8 receives the IMT value and its reliability from the reliability determination unit 6 and stores them together with the tomographic image formed by the tomographic image construction unit 31.
- the automatic freeze control unit 70 determines whether or not the conditions for automatic freezing are satisfied based on the determination result of the reliability determination unit 6, and automatically enters the frozen state if the conditions are satisfied. Processing to be transferred is performed (steps S109 to S112).
- step S109 if the automatic freeze control unit 70 is within a predetermined period after the predetermined operation event is received by the operation event receiving unit 9, in order to suppress the automatic freeze in the determination of the subsequent step S111, in step S110, the conditions for automatic freezing are corrected.
- the predetermined period is, for example, “5 seconds” after a predetermined operation event is received or after the operation event ends. Further, the predetermined period may be individually set / changed according to the type of operation event.
- Predetermined operation events for suppressing automatic freezing include release of the freeze state, movement of the range where ultrasonic transmission / reception processing unit 2 performs ultrasonic transmission / reception processing, change in size, and target to be processed by blood vessel wall thickness calculation unit 4 Parameters (scanning line density, presence / absence of parallel reception, or parallel) related to movement of range (ROI), change of size, change of depth range of tomographic image constructed by tomographic image construction unit 31, transmission / reception processing in ultrasonic transmission / reception processing unit 2 Changes in the number of receptions, transmission frequency, transmission power, transmission interval), changes in signal processing parameters (gain, dynamic range, presence / absence or characteristics of filter processing) in the signal processing unit 21, and clearing of data recorded in the cine memory 8 It may be an accompanying operation event.
- the recommended IMT measurement range (see FIGS. 11A and 11B) as described above is the end 1 cm of the distal side (head side) of the common carotid artery 207 of the carotid artery, and the vessel wall thickness
- the target range (ROI) to be processed by the calculation unit 4 is set in correspondence with this IMT measurement range, but the IMT measurement range is recommended by suppressing automatic freezing after the movement or size change of the ROI. It is possible to prevent automatic freezing during adjustment to the position and size.
- automatic freeze can be suppressed after changing parameters related to transmission / reception processing in the ultrasonic transmission / reception processing unit 2 such as scanning line density, presence / absence of parallel reception or the number of parallel receptions, transmission frequency, transmission power, and transmission interval.
- the scanning line density is the degree of clogging of the scanning lines when performing ultrasonic transmission / reception scanning
- parallel reception is the simultaneous reception processing with a plurality of scanning lines for transmission of one ultrasonic pulse. That is.
- the number of parallel receptions is the number of scanning lines that perform reception processing simultaneously
- the transmission frequency is the frequency of the ultrasonic pulse to be transmitted
- the transmission power is the amplitude of the ultrasonic pulse to be transmitted
- the gain is the amount of amplification of the received signal
- the dynamic range is the range of the value of the received signal to be imaged when the received signal is imaged into a tomographic image
- the filtering process is the received signal
- various filter processes for example, a low-pass filter, a high-pass filter, a noise-cutting spatial filter, an ultrasonic image inter-frame filter, etc.
- the entire operation involving the clearing of the data recorded in the cine memory is automatically frozen during those operations. Can be prevented.
- the automatic freeze may be suppressed only after one of these operation events, or after a plurality or all of the operation events.
- the automatic freeze may be suppressed.
- automatic freeze may be suppressed after other operation events.
- method (a) As a method of correcting the automatic freeze condition in step S110, a method of invalidating automatic freeze (hereinafter referred to as method (a)) and a method of severely changing the automatic freeze condition (hereinafter referred to as method (b)). And).
- Method (a) does not automatically freeze at step S111 at a later stage regardless of the result of the reliability determination unit 6.
- This method can be applied to the case where the determination in the reliability determination unit 6 is the two choices of whether or not the IMT value is reliable, and also to the case where the evaluation value representing the reliability of the IMT value is calculated. By doing so, it is possible to prevent operability from being impaired by being automatically frozen during various adjustment operations.
- the method (b) can be applied when the reliability determination unit 6 calculates an evaluation value representing the reliability of the IMT value, and a strict reference value in determining whether to automatically freeze in the subsequent step S111, that is, When the evaluation value representing the reliability of the IMT value is frozen when it exceeds a predetermined reference value, the reference value is changed to a higher value so that the evaluation value does not easily exceed the reference value.
- FIG. 10A shows the relationship between the time and the reference value when the reference value is changed to a value larger than the original value by a fixed amount only for a predetermined fixed period after the operation event is received.
- FIG. 10B shows an example in which the reference value is gradually lowered until the condition before the change is returned after the reference value is changed to a value larger than the original value when an operation event is received.
- step S111 the automatic freeze control unit 70 determines whether to automatically freeze based on the result of the reliability determination unit 6.
- the reliability determination unit 6 determines the reliability of the IMT value with two choices of “no reliability”, it automatically freezes when it is determined that there is reliability.
- the reliability determination unit 6 calculates the reliability of the IMT value as an evaluation value, the evaluation value is compared with a predetermined reference value, and the evaluation value exceeds the reference value and is determined to be reliable. Auto freeze in case.
- the evaluation value is reliable when the evaluation value falls below the reference value. It is also possible to determine that there is a property. For example, the evaluation value may be simply reversed. In this case, if the reference value is changed strictly, the reference value is changed to a smaller value.
- step S111 if it is within a certain period after receiving the predetermined operation event in step S109, the determination is performed by reflecting the correction of the automatic freeze condition in step S110. That is, when the automatic freeze is invalidated in step S111, the automatic freeze is not performed regardless of the determination result of the reliability determination unit 6.
- the evaluation value of the reliability of the IMT value is compared with the changed reference value for determination.
- the automatic freeze control unit 70 determines an IMT value as an IMT measurement value in step S112, and shifts to a frozen state. Then, the control unit 7 controls each block in accordance with the transition to the freeze state. Specifically, the ultrasonic transmission / reception processing unit 2 is controlled so as to stop the ultrasonic transmission processing or reception processing. Further, the image composition unit 11 is controlled so that the tomographic image displayed on the display device 12 is stationary.
- the tomographic image stationary means that the image synthesizing unit 11 generates a synthesized signal so that the measured tomographic image determined as the IMT measurement value is displayed on the display device 12, and the tomographic image of the subsequent frame is the synthesized signal. It means not updating.
- step S111 If it is determined in step S111 that automatic freezing is not performed, the process returns to step S101 and measurement is continued. At this time, the automatic freeze condition is returned to the value before correction. That is, the automatic freeze condition is set as the initial condition.
- step S113 the image synthesizing unit 11 synthesizes the IMT measurement value determined based on the result determined by the reliability determining unit 6 and the tomographic image constructed by the tomographic image constructing unit 31 for display. To the device 12. As a result, the operator can check the diagnostic image and the measurement result. At this time, the IMT value and the tomographic image may be read from the cine memory 8 and combined and displayed.
- the blood vessel center determination process (step S105) and the pulsatility determination process (step S106) are executed in this order, but these are in no particular order.
- the automatic freeze condition is corrected (step S109 and step S110) whenever the reliability of the IMT value is determined (step S107) and within a certain period from the predetermined event.
- the automatic freeze condition is corrected when a predetermined operation event is received, and then the automatic freeze condition is restored after a certain period of time by the timer process, or by the timer process of a predetermined period. It is also possible to process in an event-driven manner so that the above condition is gradually changed until it is restored. That is, as shown in FIG. 10A or 10B, the automatic freeze condition may have a reference value that changes with time. In this case, steps S109 and S110 are omitted in the flowchart shown in FIG.
- the blood vessel center determining unit 32 uses the tomographic image constructed by the tomographic image constructing unit 31 and the blood vessel boundary detected by the boundary detecting unit 41 to cause the probe 1 applied to the subject to It was judged whether the center of
- a reception echo signal that is an output of the ultrasonic transmission / reception processing unit 2 is directly input to the blood vessel center determination unit 32 without passing through the tomographic image construction unit 31, ultrasonic transmission / reception is performed instead of the tomographic image.
- the amplitude of the received echo signal output from the processing unit 2 can also be used to determine whether the probe 1 applied to the subject is capturing the center of the blood vessel. As a result, the determination can be performed without depending on the settings and parameters when constructing the tomographic image.
- the present invention can be applied by controlling so as to suppress automatic freezing for a predetermined time after receiving a predetermined operation. For example, in obstetrics, the femoral femur length is measured using an ultrasound diagnostic device, but when it is determined that the femoral length can be measured with high reliability, a predetermined operation is accepted when automatic freezing is performed. After that, the automatic freeze can be suppressed for a certain time.
- the intensity ratio of the received signal between the femur and the surrounding tissue is a predetermined value or more, Whether or not these conditions are satisfied can be determined by the reliability determination unit.
- the automatic freeze is performed only for a certain time after receiving a predetermined operation.
- the present invention can be applied by controlling so as to suppress this.
- whether the image quality of the tomographic image obtained based on the received signal is high for example, calculates a numerical value indicating the change of the image between frames, and uses the condition that this numerical value is within a predetermined range, It can be determined by the determination unit. This is because when the probe is stably applied to the subject, the change in the image between frames becomes small, and a high-quality tomographic image can be obtained.
- the measurement processing range is ROI.
- a range in which ultrasonic transmission / reception scanning is performed in tomographic image display or color flow image display, tomographic image generation, or color image may be the ROI.
- the range of Doppler spectrum analysis may be set as the ROI.
- the present invention can be applied by controlling the automatic freeze only for a certain period of time after moving or changing the position of the ROI.
- the automatic freeze is suppressed after the change of the depth range of the tomographic image.
- the ultrasonic image to be changed is not limited to the tomographic image, but is a color flow image.
- the present invention can also be applied to other ultrasonic images such as image and time-change image (M mode image).
- an ultrasonic diagnostic apparatus that improves operability by automatic freezing and that is not automatically frozen during operations such as various adjustments and does not impair operability.
- the above configuration does not cause the operator to enter the freeze state at an inappropriate timing even though the operator is performing an operation such as a measurement range or other adjustments. Operability can be improved. Accordingly, it can be widely used as an ultrasonic diagnostic apparatus and an ultrasonic diagnostic apparatus control method corresponding to various diagnoses and measurements in which automatic freeze including IMT measurement is useful.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Public Health (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Surgery (AREA)
- Radiology & Medical Imaging (AREA)
- Molecular Biology (AREA)
- Physics & Mathematics (AREA)
- Animal Behavior & Ethology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biophysics (AREA)
- Veterinary Medicine (AREA)
- Heart & Thoracic Surgery (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Vascular Medicine (AREA)
- Physiology (AREA)
- Gynecology & Obstetrics (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Epidemiology (AREA)
- Primary Health Care (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
Description
・ 最大振幅、最小振幅:それぞれ図6のAmax、Amin
・ 最大振幅(Amax)になるタイミング:Tmax
・ 最小振幅(Amin)になるタイミング:Tmin
・ 一心拍周期:TR
2 超音波送受信処理部
3 断層像処理部
4 血管壁厚算出部
5 拍動検出部
6 信頼性判定部
7 制御部
8 シネメモリ
9 操作イベント受付部
10 操作器
11 画像合成部
12 表示器
21 信号処理部
31 断層像構築部
32 血管中心判定部
41 境界検出部
42 IMT算出部
51 拍動情報処理部
52 拍動性判定部
53 心拍期検出部
70 自動フリーズ制御部
90 血管
91 被検体皮膚表面
100 制御器
101 超音波診断装置
201 血管内腔
202 外膜
203 内中膜
204 内腔内膜境界
205 中膜外膜境界
206 IMT計測範囲
207 総頸動脈
208 推奨IMT計測範囲
Claims (22)
- 振動子を有する探触子が接続可能な超音波診断装置であって、
前記探触子を駆動して被検体へ超音波を送信する送信処理と、前記探触子によって受信した前記被検体からの反射超音波に基づく受信信号を生成する受信処理とを行い、
前記受信信号に基づく所定の条件が満たされた場合に、前記送信処理および前記受信処理の少なくともいずれか一つを停止する自動フリーズ処理を行う制御器を備え、
前記制御器は、所定の操作イベントを受け付けてから所定の期間、前記自動フリーズ処理の抑制を行う超音波診断装置。 - 振動子を有する探触子が接続可能な超音波診断装置であって、
前記探触子を駆動して被検体へ超音波を送信する送信処理と、前記探触子によって受信した前記被検体からの反射超音波に基づく受信信号を生成する受信処理とを行い、
前記受信信号に対して所定の信号処理を行い、
前記受信信号に基づく所定の条件が満たされた場合に、前記送信処理、前記受信処理および前記所定の信号処理の少なくともいずれか一つを停止する自動フリーズ処理を行う制御器を備え、
前記制御器は、所定の操作イベントを受け付けてから所定の期間、前記自動フリーズ処理の抑制を行う超音波診断装置。 - 前記制御器は、前記自動フリーズ処理の抑制として、前記所定の期間、前記自動フリーズ処理を無効化する請求項1または2に記載の超音波診断装置。
- 前記制御器は、前記自動フリーズ処理の抑制として、前記所定の期間、前記所定の条件よりも高い基準に設定変更する処理を行う請求項1または2に記載の超音波診断装置。
- 前記制御器は、前記自動フリーズ処理の抑制として、前記所定の操作イベントを受け付けた後、前記所定の条件よりも高い基準に設定変更する処理を行い、前記所定の期間をかけて、前記所定の条件に戻す処理を行う請求項1または2に記載の超音波診断装置。
- 前記所定の操作イベントは、前記フリーズ状態の解除である請求項1から5のいずれに記載の超音波診断装置。
- 前記制御器は、前記超音波送受信処理を行う範囲、または、前記受信信号に対して所定の信号処理を行う範囲の少なくともいずれか一方を指定する範囲指定処理を行い、前記所定の操作イベントは、前記範囲の位置の移動または大きさの変更である請求項2に記載の超音波診断装置。
- 前記所定の信号処理は、超音波画像の生成を含み、
前記所定の操作イベントは、前記超音波画像の深度範囲の変更である請求項2に記載の超音波診断装置。 - 前記所定の操作イベントは、前記超音波送受信処理のパラメータの変更である請求項1から5のいずれかに記載の超音波診断装置。
- 前記超音波送受信処理のパラメータは、走査線密度、並列受信の有無又は並列受信数、送信周波数、送信パワー、送信間隔のいずれかである請求項9に記載の超音波診断装置。
- 前記所定の操作イベントは、前記所定の信号処理に関するパラメータの変更である請求項2に記載の超音波診断装置。
- 前記所定の信号処理に関するパラメータは、ゲイン、ダイナミックレンジ、フィルタ処理の有無または特性のいずれかである請求項11に記載の超音波診断装置。
- 前記制御器は、前記受信信号または前記所定の信号処理が行われた情報を記録する記録部を有し、前記所定の操作イベントは、前記記録部に記録されたデータのクリアを伴う操作イベントである請求項2に記載の超音波診断装置。
- 前記制御器は、前記所定の信号処理として、前記受信信号に基づき前記血管の内腔内膜境界および中膜外膜境界を検出してその間隔を血管壁厚値として算出する請求項2に記載の超音波診断装置。
- 前記制御器は、前記所定の信号処理として、前記血管壁厚値の信頼性を判定し、その判定結果に基づき前記血管壁厚値を内中膜複合体厚と確定して自動フリーズ処理を行う請求項14に記載の超音波診断装置。
- 前記制御器は、前記算出された血管壁厚値の信頼性を、前記血管の内腔内膜境界および中膜外膜境界を検出した受信信号の特徴に基づき判定する請求項15に記載の超音波診断装置。
- 前記受信信号の特徴は、信号強度および信号強度の分布の少なくともいずれか一つである請求項16に記載の超音波診断装置。
- 前記制御器は、前記受信信号から断層像を構成し、
前記算出された血管壁厚値の信頼性を、前記断層像上の特徴に基づき判定する請求項15に記載の超音波診断装置。 - 前記断層像上の特徴は、輝度、輝度の分布および形体の少なくともいずれか一つである請求項18に記載の超音波診断装置。
- 振動子を有する探触子が接続可能な超音波診断装置の制御方法であって、
前記探触子を駆動して超音波を送信する送信処理と、前記探触子によって受信した被検体からの反射超音波に基づく受信信号を生成する受信処理とを行う第一の工程と、
前記受信信号に基づく所定の条件が満たされた場合に、前記送信処理および前記受信処理の少なくともいずれか一つを停止する自動フリーズ処理を、所定の操作イベントを受け付けてから所定の期間、抑制する処理を行う第二の工程と、
前記所定の期間経過後、前記自動フリーズ処理を行う第三の工程と、を含む超音波診断装置の制御方法。 - 振動子を有する探触子が接続可能な超音波診断装置の制御方法であって、
前記探触子を駆動して超音波を送信する送信処理と、前記探触子によって受信した被検体からの反射超音波に基づく受信信号を生成する受信処理とを行う第一の工程と、
前記受信信号に対して所定の信号処理を行う第二の工程と、
前記受信信号に基づく所定の条件が満たされた場合に、前記送信処理、前記受信処理および前記所定の信号処理の少なくともいずれか一つを停止する自動フリーズ処理を、所定の操作イベントを受け付けてから所定の期間、抑制する処理を行う第三の工程と、
前記所定の期間経過後、前記自動フリーズ処理を行う第四の工程と、を含む超音波診断装置の制御方法。 - 前記第一の工程は、前記探触子を駆動して血管を含む被検体へ超音波を送信する送信処理と、前記探触子によって受信した前記血管を含む被検体からの反射超音波に基づく受信信号を生成する受信処理とを行い、
前記受信信号に基づき前記血管の内腔内膜境界および中膜外膜境界を検出してその間隔を血管壁厚値として算出し、算出された血管壁厚値の信頼性を判定してその判定結果に基づき前記血管壁厚値を内中膜複合体厚と確定する所定の処理である、請求項20または21に記載の超音波診断装置の制御方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/817,975 US20130150721A1 (en) | 2010-12-24 | 2011-12-22 | Ultrasound diagnostic apparatus and ultrasound diagnostic apparatus control method |
| CN201180018684.2A CN102834061B (zh) | 2010-12-24 | 2011-12-22 | 超声波诊断装置及超声波诊断装置的控制方法 |
| JP2012549645A JP5928342B2 (ja) | 2010-12-24 | 2011-12-22 | 超音波診断装置および超音波診断装置の制御方法 |
| EP11851428.0A EP2656792A4 (en) | 2010-12-24 | 2011-12-22 | ULTRASONIC DIAGNOSTIC APPARATUS AND METHOD FOR CONTROLLING ULTRASONIC DIAGNOSTIC DEVICE |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010287297 | 2010-12-24 | ||
| JP2010-287297 | 2010-12-24 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012086207A1 true WO2012086207A1 (ja) | 2012-06-28 |
Family
ID=46313498
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/007208 WO2012086207A1 (ja) | 2010-12-24 | 2011-12-22 | 超音波診断装置および超音波診断装置の制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20130150721A1 (ja) |
| EP (1) | EP2656792A4 (ja) |
| JP (1) | JP5928342B2 (ja) |
| CN (1) | CN102834061B (ja) |
| WO (1) | WO2012086207A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014140717A (ja) * | 2012-12-28 | 2014-08-07 | Canon Inc | 被検体情報取得装置、表示方法、およびプログラム |
| WO2015107993A1 (ja) * | 2014-01-15 | 2015-07-23 | 日立アロカメディカル株式会社 | 超音波診断装置及び脈波計測方法 |
| US10761198B2 (en) | 2015-12-01 | 2020-09-01 | Samsung Medison Co., Ltd. | Method and apparatus for acquiring image using ultrasound |
| US10925315B2 (en) | 2015-03-26 | 2021-02-23 | Philip Morris Products S.A. | Heater management |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140039319A1 (en) * | 2012-08-06 | 2014-02-06 | Seiko Epson Corporation | Ultrasonic measuring apparatus and blood vessel inner diameter calculating method |
| CN103110430B (zh) * | 2012-12-29 | 2014-12-31 | 重庆海扶医疗科技股份有限公司 | 超声实时高清图像跟踪方法 |
| CN103278186B (zh) * | 2013-04-26 | 2015-12-09 | 苏州佳世达电通有限公司 | 侦测影像以判断扫描状态及非扫描状态的方法 |
| CN103996194B (zh) * | 2014-05-23 | 2016-08-31 | 华中科技大学 | 一种基于超声颈动脉图像的内中膜自动分割方法 |
| JP5934816B1 (ja) * | 2015-02-10 | 2016-06-15 | 日立アロカメディカル株式会社 | 超音波診断システム |
| WO2017110361A1 (ja) * | 2015-12-25 | 2017-06-29 | 古野電気株式会社 | 超音波解析装置、超音波解析方法、および超音波解析プログラム |
| JP7129158B2 (ja) * | 2016-11-24 | 2022-09-01 | キヤノン株式会社 | 情報処理装置、情報処理方法、情報処理システムおよびプログラム |
| CN111225619B (zh) | 2017-10-17 | 2023-04-04 | 富士胶片株式会社 | 声波诊断装置及声波诊断装置的控制方法 |
| CN109949903B (zh) * | 2019-03-26 | 2023-05-16 | 南京长城智慧医疗科技有限公司 | 医学影像静止画面捕捉方法及系统 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0928712A (ja) * | 1995-07-19 | 1997-02-04 | Ge Yokogawa Medical Syst Ltd | 超音波診断装置の画面表示制御方法および超音波診断装置および穿刺ガイド治具および超音波プローブ |
| JP2005319296A (ja) * | 2004-05-04 | 2005-11-17 | General Electric Co <Ge> | 超音波システムのパワーを制御するための方法及び装置 |
| JP2005348807A (ja) * | 2004-06-08 | 2005-12-22 | Shimadzu Corp | 超音波診断装置 |
| JP2006122295A (ja) * | 2004-10-28 | 2006-05-18 | Matsushita Electric Ind Co Ltd | 超音波診断装置 |
| JP2007252635A (ja) * | 2006-03-23 | 2007-10-04 | Olympus Medical Systems Corp | 画像処理装置 |
| JP2010022565A (ja) | 2008-07-18 | 2010-02-04 | Fujifilm Corp | 超音波診断装置 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02206442A (ja) * | 1989-02-03 | 1990-08-16 | Hitachi Medical Corp | 超音波診断装置 |
| US20040015079A1 (en) * | 1999-06-22 | 2004-01-22 | Teratech Corporation | Ultrasound probe with integrated electronics |
| US6436045B1 (en) * | 2000-04-27 | 2002-08-20 | Koninklijke Phillips Electronics N.V. | User controlled destructive waveform routine for ultrasound systems |
| US6835177B2 (en) * | 2002-11-06 | 2004-12-28 | Sonosite, Inc. | Ultrasonic blood vessel measurement apparatus and method |
| WO2004051307A2 (en) * | 2002-12-03 | 2004-06-17 | Koninklijke Philips Electronics N.V. | Method and apparatus to display 3d rendered ultrasound data on an ultrasound cart in stereovision |
| JP2004305377A (ja) * | 2003-04-04 | 2004-11-04 | Shimadzu Corp | 超音波診断装置 |
| CN100431498C (zh) * | 2003-04-08 | 2008-11-12 | 株式会社日立医药 | 超声波诊断装置 |
| US8267864B2 (en) * | 2003-04-08 | 2012-09-18 | Hitachi Medical Corporation | Ultrasonic diagnostic apparatus |
| EP2460474B1 (en) * | 2003-05-08 | 2015-12-16 | Hitachi Medical Corporation | Reference image display method for ultrasonography and ultrasonic diagnosis apparatus |
| EP1806099A4 (en) * | 2004-10-19 | 2007-12-12 | Matsushita Electric Ind Co Ltd | ULTRASONIC UNIT AND ULTRASONIC CONTROL SYSTEM |
| US7695439B2 (en) * | 2005-08-22 | 2010-04-13 | Siemens Medical Solutions Usa, Inc. | Automated identification of cardiac events with medical ultrasound |
| JPWO2007080870A1 (ja) * | 2006-01-11 | 2009-06-11 | パナソニック株式会社 | 超音波診断装置 |
| JP5300188B2 (ja) * | 2006-09-11 | 2013-09-25 | 株式会社東芝 | 超音波診断装置及び超音波診断装置の制御プログラム |
| JP5305616B2 (ja) * | 2007-06-07 | 2013-10-02 | 株式会社東芝 | 検査データ処理装置及び検査システム |
| JP2009153573A (ja) * | 2007-12-25 | 2009-07-16 | Panasonic Corp | 超音波診断装置および断層画像処理方法 |
| US8235900B2 (en) * | 2009-03-23 | 2012-08-07 | Imsonic Medical, Inc. | Method and apparatus for an automatic ultrasound imaging system |
| US9066674B2 (en) * | 2010-03-17 | 2015-06-30 | Siemens Medical Solutions Usa, Inc. | Motion synchronized destruction for three-dimensional reperfusion mapping in medical diagnostic ultrasound imaging |
| US8313437B1 (en) * | 2010-06-07 | 2012-11-20 | Suri Jasjit S | Vascular ultrasound intima-media thickness (IMT) measurement system |
-
2011
- 2011-12-22 CN CN201180018684.2A patent/CN102834061B/zh active Active
- 2011-12-22 WO PCT/JP2011/007208 patent/WO2012086207A1/ja active Application Filing
- 2011-12-22 JP JP2012549645A patent/JP5928342B2/ja active Active
- 2011-12-22 EP EP11851428.0A patent/EP2656792A4/en not_active Withdrawn
- 2011-12-22 US US13/817,975 patent/US20130150721A1/en not_active Abandoned
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0928712A (ja) * | 1995-07-19 | 1997-02-04 | Ge Yokogawa Medical Syst Ltd | 超音波診断装置の画面表示制御方法および超音波診断装置および穿刺ガイド治具および超音波プローブ |
| JP2005319296A (ja) * | 2004-05-04 | 2005-11-17 | General Electric Co <Ge> | 超音波システムのパワーを制御するための方法及び装置 |
| JP2005348807A (ja) * | 2004-06-08 | 2005-12-22 | Shimadzu Corp | 超音波診断装置 |
| JP2006122295A (ja) * | 2004-10-28 | 2006-05-18 | Matsushita Electric Ind Co Ltd | 超音波診断装置 |
| JP2007252635A (ja) * | 2006-03-23 | 2007-10-04 | Olympus Medical Systems Corp | 画像処理装置 |
| JP2010022565A (ja) | 2008-07-18 | 2010-02-04 | Fujifilm Corp | 超音波診断装置 |
Non-Patent Citations (2)
| Title |
|---|
| JOURNAL OF THE AMERICAN SOCIETY OF ECHOCARDIOGRAPHY, February 2008 (2008-02-01), pages 93 - 111 |
| See also references of EP2656792A4 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014140717A (ja) * | 2012-12-28 | 2014-08-07 | Canon Inc | 被検体情報取得装置、表示方法、およびプログラム |
| WO2015107993A1 (ja) * | 2014-01-15 | 2015-07-23 | 日立アロカメディカル株式会社 | 超音波診断装置及び脈波計測方法 |
| US10925315B2 (en) | 2015-03-26 | 2021-02-23 | Philip Morris Products S.A. | Heater management |
| US10761198B2 (en) | 2015-12-01 | 2020-09-01 | Samsung Medison Co., Ltd. | Method and apparatus for acquiring image using ultrasound |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2656792A1 (en) | 2013-10-30 |
| JP5928342B2 (ja) | 2016-06-01 |
| US20130150721A1 (en) | 2013-06-13 |
| JPWO2012086207A1 (ja) | 2014-05-22 |
| CN102834061A (zh) | 2012-12-19 |
| EP2656792A4 (en) | 2014-05-07 |
| CN102834061B (zh) | 2016-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5928342B2 (ja) | 超音波診断装置および超音波診断装置の制御方法 | |
| JP5754379B2 (ja) | 超音波診断装置および内中膜複合体厚の測定方法 | |
| JP5501999B2 (ja) | 超音波診断装置および弾性指標信頼性判定方法 | |
| JP4829960B2 (ja) | 超音波診断装置 | |
| JP5975027B2 (ja) | 超音波診断装置およびそれを用いた超音波計測方法 | |
| WO2012081709A1 (ja) | 超音波診断装置及びその制御方法 | |
| JP5158880B2 (ja) | 超音波診断装置 | |
| JP2005342006A (ja) | 超音波診断装置、超音波画像処理装置、及び超音波信号処理プログラム | |
| JP5649519B2 (ja) | 超音波診断装置 | |
| WO2008038615A1 (fr) | dispositif ÉCHOGRAPHIQUE | |
| JP5384919B2 (ja) | 超音波診断装置 | |
| JP2021533913A (ja) | 脈波伝播速度測定を実行するためのシステム及び方法 | |
| JP5438722B2 (ja) | 超音波診断装置 | |
| JP4091365B2 (ja) | 超音波診断装置 | |
| JP4918369B2 (ja) | 超音波診断装置 | |
| JP2007007200A (ja) | 超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム | |
| JP2009039277A (ja) | 超音波診断装置 | |
| JP2012249848A (ja) | 超音波診断装置 | |
| JP2010110373A (ja) | 動脈硬化リスク表示機能を備えた超音波診断装置 | |
| JP5462474B2 (ja) | 超音波診断装置 | |
| JP6098641B2 (ja) | 超音波診断装置、超音波診断装置の制御方法および超音波診断装置の制御器 | |
| JP2011019993A (ja) | 超音波診断装置、超音波画像処理装置、及び超音波信号処理プログラム | |
| JPWO2006126485A1 (ja) | 超音波診断装置 | |
| JP2007054226A (ja) | 超音波診断装置 | |
| JP2007007347A (ja) | 超音波診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201180018684.2 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11851428 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2012549645 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13817975 Country of ref document: US |
|
| REEP | Request for entry into the european phase |
Ref document number: 2011851428 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011851428 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |