WO2012008492A1 - X線断層像撮影装置 - Google Patents
X線断層像撮影装置 Download PDFInfo
- Publication number
- WO2012008492A1 WO2012008492A1 PCT/JP2011/065987 JP2011065987W WO2012008492A1 WO 2012008492 A1 WO2012008492 A1 WO 2012008492A1 JP 2011065987 W JP2011065987 W JP 2011065987W WO 2012008492 A1 WO2012008492 A1 WO 2012008492A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- ray
- detector
- image
- imaging
- ray tube
- Prior art date
Links
- 238000003384 imaging method Methods 0.000 title claims abstract description 226
- 238000013170 computed tomography imaging Methods 0.000 claims abstract description 62
- 238000000034 method Methods 0.000 claims description 141
- 210000004513 dentition Anatomy 0.000 claims description 97
- 230000036346 tooth eruption Effects 0.000 claims description 97
- 238000003325 tomography Methods 0.000 claims description 26
- 238000002591 computed tomography Methods 0.000 claims description 20
- 230000008859 change Effects 0.000 claims description 17
- 238000012937 correction Methods 0.000 claims description 13
- 230000005540 biological transmission Effects 0.000 claims description 11
- 239000000126 substance Substances 0.000 claims description 6
- 238000009499 grossing Methods 0.000 claims description 3
- 238000002247 constant time method Methods 0.000 claims 2
- 230000005855 radiation Effects 0.000 abstract description 24
- 238000009658 destructive testing Methods 0.000 abstract 1
- 239000003814 drug Substances 0.000 abstract 1
- 230000008569 process Effects 0.000 description 81
- 238000012545 processing Methods 0.000 description 44
- 238000010586 diagram Methods 0.000 description 39
- 230000033001 locomotion Effects 0.000 description 37
- 239000003550 marker Substances 0.000 description 32
- 238000001514 detection method Methods 0.000 description 27
- 230000006870 function Effects 0.000 description 27
- FFYPMLJYZAEMQB-UHFFFAOYSA-N diethyl pyrocarbonate Chemical compound CCOC(=O)OC(=O)OCC FFYPMLJYZAEMQB-UHFFFAOYSA-N 0.000 description 20
- 238000004364 calculation method Methods 0.000 description 17
- 230000036961 partial effect Effects 0.000 description 17
- 238000007689 inspection Methods 0.000 description 16
- 230000007246 mechanism Effects 0.000 description 16
- 210000003128 head Anatomy 0.000 description 14
- 238000004458 analytical method Methods 0.000 description 13
- 230000002829 reductive effect Effects 0.000 description 13
- 210000000481 breast Anatomy 0.000 description 11
- 238000013480 data collection Methods 0.000 description 11
- 210000003298 dental enamel Anatomy 0.000 description 9
- 238000013507 mapping Methods 0.000 description 9
- 238000013461 design Methods 0.000 description 8
- 210000000988 bone and bone Anatomy 0.000 description 7
- 238000009607 mammography Methods 0.000 description 7
- 238000012916 structural analysis Methods 0.000 description 7
- 230000000007 visual effect Effects 0.000 description 7
- 238000013459 approach Methods 0.000 description 6
- 238000009434 installation Methods 0.000 description 6
- 239000011347 resin Substances 0.000 description 6
- 229920005989 resin Polymers 0.000 description 6
- 102100030293 Protein spinster homolog 1 Human genes 0.000 description 5
- 238000002601 radiography Methods 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 230000002159 abnormal effect Effects 0.000 description 4
- 239000008186 active pharmaceutical agent Substances 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 210000000214 mouth Anatomy 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 210000000038 chest Anatomy 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000003672 processing method Methods 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- 238000010521 absorption reaction Methods 0.000 description 2
- FFBHFFJDDLITSX-UHFFFAOYSA-N benzyl N-[2-hydroxy-4-(3-oxomorpholin-4-yl)phenyl]carbamate Chemical compound OC1=C(NC(=O)OCC2=CC=CC=C2)C=CC(=C1)N1CCOCC1=O FFBHFFJDDLITSX-UHFFFAOYSA-N 0.000 description 2
- 238000012730 cephalometry Methods 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 210000001061 forehead Anatomy 0.000 description 2
- 230000001678 irradiating effect Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 210000003625 skull Anatomy 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 238000002834 transmittance Methods 0.000 description 2
- 239000004925 Acrylic resin Substances 0.000 description 1
- 229920000178 Acrylic resin Polymers 0.000 description 1
- 229910001369 Brass Inorganic materials 0.000 description 1
- 101100422770 Caenorhabditis elegans sup-1 gene Proteins 0.000 description 1
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 229910004613 CdTe Inorganic materials 0.000 description 1
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 206010058467 Lung neoplasm malignant Diseases 0.000 description 1
- 102220645313 Protein spinster homolog 1_S53A_mutation Human genes 0.000 description 1
- 102220468073 Trafficking protein particle complex subunit 5_S52A_mutation Human genes 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 239000010951 brass Substances 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 239000002041 carbon nanotube Substances 0.000 description 1
- 229910021393 carbon nanotube Inorganic materials 0.000 description 1
- 210000001715 carotid artery Anatomy 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000002316 cosmetic surgery Methods 0.000 description 1
- 230000001066 destructive effect Effects 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000010894 electron beam technology Methods 0.000 description 1
- 230000007717 exclusion Effects 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 235000013305 food Nutrition 0.000 description 1
- 238000002513 implantation Methods 0.000 description 1
- 229910052500 inorganic mineral Inorganic materials 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 201000005202 lung cancer Diseases 0.000 description 1
- 208000020816 lung neoplasm Diseases 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 239000011707 mineral Substances 0.000 description 1
- 230000000399 orthopedic effect Effects 0.000 description 1
- 238000010422 painting Methods 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 235000011962 puddings Nutrition 0.000 description 1
- 238000009877 rendering Methods 0.000 description 1
- 238000012216 screening Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 239000002344 surface layer Substances 0.000 description 1
- 210000001738 temporomandibular joint Anatomy 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images

































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/50—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications
- A61B6/51—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications for dentistry
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/46—Arrangements for interfacing with the operator or the patient
- A61B6/461—Displaying means of special interest
- A61B6/466—Displaying means of special interest adapted to display 3D data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/58—Testing, adjusting or calibrating thereof
- A61B6/582—Calibration
- A61B6/583—Calibration using calibration phantoms
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/003—Reconstruction from projections, e.g. tomography
- G06T11/006—Inverse problem, transformation from projection-space into object-space, e.g. transform methods, back-projection, algebraic methods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/025—Tomosynthesis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/032—Transmission computed tomography [CT]
- A61B6/035—Mechanical aspects of CT
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/547—Control of apparatus or devices for radiation diagnosis involving tracking of position of the device or parts of the device
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10072—Tomographic images
- G06T2207/10081—Computed x-ray tomography [CT]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30036—Dental; Teeth
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30196—Human being; Person
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2211/00—Image generation
- G06T2211/40—Computed tomography
- G06T2211/436—Limited angle
Definitions
- the present invention relates to an X-ray tomographic imaging apparatus that captures a tomographic image of an object using X-rays, and more particularly to an X-ray that captures a tomographic image such as a three-dimensional panoramic image of an object based on a tomosynthesis method.
- the present invention relates to a tomographic imaging apparatus.
- the movement of an X-ray detector (hereinafter referred to as a detector) is limited, and the focus is on a tomographic plane (referred to as a reference tomographic plane) according to a trajectory mechanically set in the imaging space. It comes to fit.
- the imaging space refers to a space in which an X-ray path moves between an X-ray tube that rotates around the jaw of a subject and a detector.
- the focus of the image is optimized only when the dentition is located along the reference tomographic plane in the imaging space.
- the image loses optimal focus and is blurred. Therefore, if you want to see the unclear part with high accuracy, reposition the subject so that the blurred part can be seen clearly and re-collect the data, or perform intraoral photography of the blurred part to obtain a clearer part. I got an image.
- an X-ray panorama that uses a detector capable of collecting X-ray detection data at a high speed (for example, 300 fps) as in Patent Document 8, captures all the detection data into a computer, and executes a tomosynthesis method. Imaging devices have been developed.
- the detection data is processed by the tomosynthesis method to generate a panoramic image of the tomographic plane, and the position of the tomographic plane is changed in the front-rear direction of the plane to generate the panoramic image of the changed tomographic plane. .
- Patent Document 9 there is also known an apparatus that can selectively execute panoramic imaging and X-ray CT imaging while using the same single apparatus.
- the panoramic imaging apparatus as the radiation imaging apparatus described above still has a surface that is difficult to use due to the problem of X-ray exposure dose.
- a panoramic imaging apparatus has a lower X-ray exposure dose than an X-ray intraoral imaging apparatus or a dental CT apparatus.
- the resolution is not good enough to replace the X-ray intraoral imaging apparatus.
- dentition scrutiny by X-ray mouth imaging devices and CT devices is still mainstream.
- the dose equivalent of the radiation exceeds “1.3 mSv in 3 months”. For this reason, the panoramic imaging apparatus needs to be installed in the radiation management area, similarly to the X-ray intraoral imaging apparatus and the CT apparatus.
- the patient is forced to move from the examination room with the treatment chair to the radiographing room, which is a radiation control area, for panoramic imaging.
- the radiographing room which is a radiation control area
- the patient is necessary for the patient to move from the clinic to the radiographing room with the reamer inserted into the tooth and perform panoramic imaging, intraoral imaging, or CT imaging. there were.
- This patient movement is troublesome for the patient himself and for the dentist.
- a dental panoramic imaging apparatus is useful, it has been pointed out that it is less convenient than the ideal use expectation.
- panoramic imaging devices have been able to reduce the X-ray exposure dose, but have not been able to provide an image with a resolution high enough to replace the X-ray intraoral imaging device. Also faced.
- the present invention has been made in view of the above-described conventional situation.
- the radiation management area is limited to a narrower range, and a reconstructed tomographic image can be observed even during work.
- An object of the present invention is to provide an X-ray tomographic imaging apparatus capable of providing a resolution tomographic image.
- the present invention has, as its main mode, two X-ray tubes that irradiate an amount of X-rays corresponding to the value of a supplied current and a plurality of pixels that respond to the X-rays.
- a detector having an incident surface on which the X-rays are incident in a dimension and outputting digital electric quantity data from the plurality of pixels for each frame according to the incidence of the X-rays; and a curved orbit And a support means for supporting the X-ray tube and the detector in a state in which the X-ray tube and the detector can be moved independently of each other along the trajectory, and a data collector,
- the X-ray is always transmitted at a desired angle at each position in the scanning direction of a desired cross section of the imaging target with respect to the imaging target placed inside the trajectory provided by the data collector.
- the tube and the detector are mutually connected along the trajectory.
- a panorama image generating unit for generating a panoramic image of the cross section by a tomosynthesis method using the data collected by the data collector, and the data collected by the data collector. And the panoramic image generated by the panoramic image generating means are used to optimize the focus of the structure on the imaging target and suppress distortion caused by the difference in the angle of the X-ray path direction.
- an X-ray tomographic imaging apparatus comprising a tomographic image generating means for generating a tomographic image.
- the X-ray tomography apparatus includes a CT image reconstruction unit that reconstructs a tomogram based on a computed tomography (CT) method using frame data collected by the detector.
- the moving means is means for moving the X-ray tube and the detector on the orbit in a state where the X-ray tube and the detector face each other, and the detector is used when performing CT imaging instead of the tomosynthesis method.
- the radiation management area is confined to a narrower range, and the reconstructed tomogram can be observed even during work.
- An image can be provided.
- this X-ray tomography apparatus when this X-ray tomography apparatus is applied to a dental X-ray extraoral imaging apparatus, a patient is allowed to sit on a treatment chair without the need for a large X-ray imaging room as a radiation control area. ) State, it is possible to take a panoramic image of the dentition during treatment, and a high-resolution panoramic image can be provided that is easy to use and replaces the X-ray intraoral photographing apparatus. Furthermore, not only panoramic radiography but also CT radiography can be selectively performed, and since one camera has an imaging function of two roles, versatility is extremely high.
- FIG. 1 is a diagram showing an outline of the overall configuration of an X-ray extraoral imaging apparatus as an X-ray tomographic imaging apparatus according to the first embodiment of the present invention.
- FIG. 2 is a block diagram showing an electrical schematic configuration of the X-ray extraoral imaging apparatus according to the present embodiment.
- FIG. 3 is a diagram for explaining in principle the orthogonal imaging method adopted in the X-ray extraoral imaging apparatus.
- FIG. 4 is a diagram for explaining an enlargement ratio.
- FIG. 5 is a diagram for explaining the control of the rotation speed and tube current of the X-ray tube and detector, which is adopted in the orthogonal imaging method according to the embodiment.
- FIG. 6 is a graph illustrating an example of the control described in FIG. FIG.
- FIG. 7 is a diagram for explaining the rotational movement of the X-ray tube and the detector for explaining the control of FIG. 5 more generally.
- FIG. 8 is a graph illustrating the relationship between the rotation angle and the control amount for explaining the control of FIG. 5 more generally.
- FIG. 9 is another graph illustrating the relationship between the rotation angle and the control amount for explaining the control of FIG. 5 more generally.
- FIG. 10 is still another graph illustrating the relationship between the rotation angle and the control amount for explaining the control of FIG. 5 more generally.
- FIGS. 11A and 11B are diagrams illustrating independent control of the collimator with respect to the X-ray tube.
- FIGS. 12A and 12B are graphs showing a control example of the rotation angle and the angular velocity of the rotation of the X-ray tube and the detector.
- FIG. 13 is a flowchart for explaining an outline of a punish scan.
- FIG. 14 is a flowchart for explaining an outline of pudding scan.
- FIGS. 15A to 15F are diagrams for explaining the rotational movement of the X-ray tube and the detector during scanning.
- FIG. 16 is a partially broken perspective view showing an example of a phantom.
- FIG. 17 is a diagram for explaining a relationship between a planting position of a column having a marker on a phantom base and a position of a tomographic plane used for calibration.
- FIG. 18 is a perspective view for explaining an example of a support post to be planted at the position of the reference tomographic plane.
- FIG. 19 is a perspective view illustrating an example of a support post to be planted at the position of the outer fault plane.
- FIGS. 20A and 20B are diagrams for explaining the position of the marker reflected in the reference plane panoramic image and the positional relationship between the detector and the marker.
- FIGS. 21A and 21B are views for explaining the principle of panoramic image reconstruction according to the present invention.
- FIGS. 22A and 22B are diagrams illustrating the geometric positional relationship in FIGS. 21A and 21B in numerical form.
- FIG. 23 is a flowchart for explaining an outline of a procedure for structural analysis and calibration of the imaging space, which is executed in cooperation with the controller and the image processor.
- FIGS. 24A to 24C are diagrams illustrating a procedure for measuring a deviation in X-ray irradiation (projection) angle.
- FIG. 25 is a diagram for explaining a shift in the X-ray irradiation angle.
- FIG. 26 is a diagram for explaining an example of an angular velocity curve and how it is corrected in accordance with the deviation of the actual X-ray irradiation angle.
- FIG. 29 is a diagram for explaining the concept of three-dimensional projection in the direction of holding the position of the X-ray tube, taking into account the correction of the enlargement factor in the vertical direction in the present embodiment.
- FIG. 30 is a flowchart showing an outline of processing for imaging executed in cooperation by the controller of the panoramic imaging apparatus and the image processor.
- FIG. 31 is a graph illustrating the relationship between frame data and the panorama image mapping position.
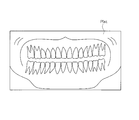
- FIG. 32 is a diagram schematically illustrating an example of a reference plane panoramic image.
- FIGS. 33A and 33B are views for explaining processing for correcting a difference in enlargement ratio in the vertical direction of a panoramic image;
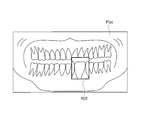
- FIG. 34 is a diagram schematically illustrating an example of an image when an ROI is set for a reference plane panoramic image.
- FIG. 35 is a flowchart for explaining the outline of processing for identifying the actual position and shape of a tooth executed by the image processor.
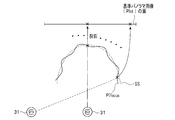
- FIG. 36 is a diagram for explaining a difference in projection angle from the same position in the Z-axis direction on the 3D panoramic image to the X-ray tube according to a change in the rotation center of the pair of the X-ray tube and the detector.
- FIG. 37 is a diagram schematically illustrating an example of a 3D reference image.
- FIG. 38 is a perspective view illustrating a plurality of parallel tomographic planes added to the 3D reference tomographic plane.
- FIG. 40A is a view for explaining processing for specifying a tomographic plane having an optimum focus for each position on the 3D reference image in the order of (A) to (D).
- FIG. 40 (2) is a diagram for explaining the process of specifying the optimally focused tomographic plane for each position on the 3D reference image in the order of (E) to (H).
- FIG. 41 is a graph illustrating the result of frequency analysis in the process of specifying the optimum focus position.
- FIG. 42 is a graph showing an example of the position of the tomographic plane of the optimum focus in the process of specifying the optimum focus position.
- FIG. 43 is a graph illustrating a frequency characteristic pattern that changes according to a tomographic plane position.
- FIG. 44 is a diagram for explaining a state where the actual tooth position is deviated from the 3D reference tomographic plane.
- FIGS. 45A and 45B are diagrams illustrating a state in which the teeth are shifted from the position of the 3D reference tomographic plane to the actual position according to the magnitude of the enlargement ratio.
- FIGS. 46A and 46B are views for explaining a state in which the teeth are shifted from the position of the 3D reference tomographic plane to the actual position according to the magnitude of the enlargement ratio.
- FIG. 47 is a diagram illustrating a state in which the tooth is shifted from the position of the 3D reference tomographic plane to the actual position according to the magnitude of the enlargement ratio.
- FIG. 48 is a perspective view illustrating processing for moving a processing point on the 3D reference image for the position identification position.
- FIG. 49 is a perspective view illustrating identification of a tomographic plane position of an optimum focus specified for each processing point and abnormal identification thereof.
- FIG. 50 is a diagram schematically showing a 3D autofocus image created by identifying the optimum focus tomographic plane position and smoothing.
- FIG. 51 is a diagram for explaining the concept of processing for projecting a 3D autofocus image onto a 3D reference tomographic plane.
- FIG. 52 is a schematic diagram schematically illustrating an image projected on a 3D reference tomographic plane and an ROI set there.
- FIG. 53 is a diagram for explaining the concept of processing for projecting a 3D autofocus image onto a two-dimensional surface of a reference plane panoramic image.
- FIG. 54 is a diagram schematically illustrating a 2D reference image and an ROI set there.
- FIG. 55 is a view for explaining an example of wearing of the X-ray extraoral imaging apparatus according to the present embodiment.
- FIG. 56 is a diagram for explaining another example of mounting of the X-ray extraoral imaging apparatus according to the present embodiment.
- FIG. 57 is a view for explaining still another example of mounting of the X-ray extraoral imaging apparatus according to the present embodiment.
- FIG. 58 is an external view for explaining an X-ray tomographic imaging apparatus according to the second embodiment of the present invention.
- FIG. 59 is a diagram for explaining different trajectories of the X-ray tube and the detector in the second embodiment.
- FIGS. 60A and 60B are a plan view and a side view of the detector used in the second embodiment.
- FIG. 61 is a diagram for explaining an effective field of view in the panorama shooting mode of the detector used in the second embodiment.
- FIG. 62 is a diagram for explaining the effective field of view in the CT imaging mode of the detector used in the second embodiment.
- FIG. 63 is a diagram illustrating rotation of the detector and movement in the height direction when shifting from the panoramic imaging mode to the CT imaging mode in the second embodiment.
- FIG. 64 is a diagram for explaining angles of an X-ray tube and its irradiation field in panoramic imaging.
- FIG. 65 is a flowchart for explaining the transition control from the panoramic imaging mode to the CT imaging mode executed by the controller in the second embodiment.
- FIG. 66 is a flowchart for explaining scanning and data collection executed by the controller in the second embodiment.
- 67 (a) and 67 (b) are diagrams for explaining the movement of the X-ray tube and detector in the body axis direction and the imaging region when CT imaging is performed on the entire region of the dentition.
- 68 (a) and 68 (b) are diagrams for explaining the movement of the X-ray tube and detector in the body axis direction and the imaging region when CT imaging is performed on a part of the dentition.
- This X-ray extra-oral imaging apparatus scans an object to be imaged (such as a dentition) of the jaw of the subject P with an X-ray from the outside of the jaw, processes the data collected by this scan by the tomosynthesis method, This is a modality that generates a tomographic image.
- the X-ray extraoral imaging apparatus according to the present embodiment is not only the function of the panoramic imaging apparatus used in the existing dental treatment, but also a small size and light weight that cannot be obtained by the conventional panoramic imaging apparatus.
- the object of the present invention can be achieved, such as providing a high-resolution image and improving a workflow derived from the inconvenience of having to provide an imaging room as a radiation control area.
- FIG. 1 shows a basic configuration of an X-ray extraoral imaging apparatus 1 according to the embodiment.
- the X-ray extra-oral imaging apparatus 1 uses a panoramic image showing the internal structure of the jaw including the dentition of the subject P from outside the subject P (patient), and three-dimensional (3D) using the panoramic image. ) Modality that provides a tomographic image.
- the X-ray extraoral imaging apparatus 1 controls, as its basic elements, a scanning apparatus 10 that performs X-ray scanning on the jaw and collects X-ray transmission data, and driving related to the scanning operation of the scanning apparatus 10.
- a computer 11 that receives X-ray transmission data collected by the scanning device 10 and reconstructs an image
- a high voltage generator 12 that supplies a high voltage to the scanning device 10 are provided.
- the scan referred to in the present embodiment is an amount necessary for image reconstruction by irradiating an X-ray (X-ray beam XB) along each of a plurality of predetermined paths with respect to the imaging region of the subject P. Is a series of operations for collecting a set of X-ray transmission data.
- the scanning device 10 is arranged so as to be close to and surround the jaw (imaging site) of the subject P by various installation methods as will be described in the following modification.
- the scanning apparatus 10 includes a circular ring body 21 that provides a circular orbit OB.
- the orbit OB is a circular orbit created virtually along the circumferential surface that forms the outer surface of the ring body 21.
- the ring body 21 is arranged around the jaw of the subject P.
- the ring body 21 may be fixedly or detachably installed on the headrest of a dental treatment chair.
- a C-shaped arm separate from the treatment chair may be prepared, and the ring body 21 may be supported by this arm.
- the ring body 21 may be supported by a holder placed on the shoulder and / or head of the subject P.
- the ring body 21 can be positioned around the jaw of the subject P at the time of scanning, and in order to reduce the amount of X-rays required for scanning, the ring body 21 is made as small as possible by reducing the diameter thereof. It is desirable to make it.
- orthogonal coordinates composed of an X-axis, a Y-axis, and a Z-axis are set with respect to the ring body 21 with the two-dimensional surface along the trajectory OB provided by the ring body 21 as the XY plane. Then, description will be made using these coordinate axes as necessary.
- the ring body 21 provides a virtual circular orbit OB along the outer peripheral surface as described above.
- the ring body 21 supports an X-ray tube unit 31U including the X-ray tube 31 and a detector unit 32U including the detector 32 so as to be movable along the orbit OB in order to perform scanning.
- a bearing (not shown) is formed on the outer circumferential surface of the ring body 21 along the circumferential direction.
- the X-ray tube unit 31U includes a moving mechanism 41 such as a worm gear that moves the unit 31U along the track OB, and an electric motor 42 that moves the moving mechanism 41. Further, in the present embodiment, the X-ray tube unit 31U includes a collimator 33 and a drive unit 34 such as an ultrasonic motor or a screw mechanism that can move the collimator 33 relative to the X-ray tube 31. .
- the internal space surrounded by the circular orbit OB provided by the ring body 21 forms an imaging space IS.
- the X-ray tube 31 is composed of, for example, a rotary anode type vacuum tube type X-ray tube or a pulse lighting type X-ray tube using a field emission type carbon nanotube cathode, and an X-ray from the target (anode). Are emitted radially toward the detector 22.
- the diameter of the focal point (so-called X-ray tube focal point) of the electron beam colliding with the target is as small as 0.25 mm or less, and therefore the X-ray tube 21 functions as a point-like X-ray source.
- a collimator 33 having a slit-like opening is positioned at a predetermined position on the front side of the X-ray tube 21. X-rays exposed from the X-ray tube 21 pass through the opening of the collimator 33. For this reason, the X-rays incident on the detector 32 can be focused on the detection surface (that is, an actual collection window (for example, a window having a width of 5.0 mm)).
- the collimator 33 is formed so that the position and posture of the collimator 33 or only the position can be moved by the moving mechanism 34. Since the collimator 33 and the moving mechanism 34 are installed inside the X-ray tube unit 31U, they move together with the X-ray tube 31.
- the detector unit 32U includes a moving mechanism 51 such as a worm gear for moving the unit 32U along the track OB, in addition to the detector 32 for detecting X-rays, and the moving mechanism 51. And an electric motor 52 that moves the motor.
- a moving mechanism 51 such as a worm gear for moving the unit 32U along the track OB, in addition to the detector 32 for detecting X-rays, and the moving mechanism 51.
- an electric motor 52 that moves the motor.
- the detector 32 is a device that functions as a radiation detection means, and is a digital X-ray detector having a detection surface in which X-ray detection elements are arranged two-dimensionally (for example, a 64 ⁇ 1500 matrix). .
- the detector 32 detects X-rays incident on the detection surface.
- the detector 32 has a vertically long detection surface (for example, 6.4 mm wide ⁇ 150 mm long) made of CdTe. Since this embodiment employs the tomosynthesis method as an image reconstruction method, the detector 32 must have a plurality of X-ray detection elements in the lateral (width) direction.
- the detector 32 is arranged in the vertical direction with its vertical direction coinciding with the Z-axis direction.
- the effective width in the horizontal direction (direction along the XY plane) at the time of detection by the detector 32 is set to, for example, about 5.0 mm by the collimator 33 described above.
- the detector 32 can directly convert incident X-rays into a digital electric signal corresponding to the amount of X-rays at a high frame rate of 300 fps (one frame is, for example, 64 ⁇ 1500 pixels), for example. Electrical signals can be collected as image data for each frame. Hereinafter, this collected data is referred to as “frame data”.
- the electric motors 42 and 52 and the drive unit 34 can be driven independently of each other in accordance with a drive signal transmitted from the computer 11. For this reason, the X-ray tube unit 31U and the detector unit 32U can move independently of each other along the orbit OB, and the collimator 33 is located with respect to the X-ray tube 31 inside the X-ray tube unit 31U. It is configured to be relatively movable independently. In addition, the structure which does not use the collimator 33 is also possible as needed.
- the drive signals from the collimator 11 to the electric motors 42 and 52 and the drive unit 34 may be transmitted by wire or wirelessly.
- the X-ray tomography apparatus is not necessarily limited to that used for a dental X-ray extraoral imaging apparatus, and the actual shape (position) of an object is three-dimensionally grasped using a tomosynthesis method. It can also be implemented in an apparatus. For example, for medical use, the present invention can be implemented in the following apparatus.
- Scanning imaging device for bones such as arms and legs It can be taken by putting the arms and legs in a rotating body, and the detector is irradiated with a photon counting type detector or two energy X-rays.
- a system for simultaneous imaging and bone mineral determination. A system that can change the scan area by adopting a structure that moves the circular dome as a ring body in the vertical direction.
- (2) Lung cancer screening device A system in which a chest is inserted into a circular dome as a ring body, and a multi-layered tomographic plane is reconstructed at once with a detector that covers the chest.
- Mammo scanner A system in which a breast is set on a circular dome as a ring body, scanned, and the multilayered tomographic plane is reconstructed at once.
- Skull outline grasping scanner A system that three-dimensionally grasps the skull surface layer by putting the head in a circular dome as a ring body.
- Cephalometry device A device that puts the head in a circular dome as a ring body, reconstructs the surface corresponding to cephalometry, and provides an image free from distortion due to the magnification. Also, aesthetic diagnostic devices such as orthopedics and cosmetic surgery.
- Cadaver identification device A system that is used for individual determination of corpses by adopting a lightweight movable structure and a structure capable of photographing cadaver teeth. Since a three-dimensional structure and a precise dentition structure can be expressed, highly accurate appraisal can be expected.
- Animal (pet) inspection X-ray device Dome-type inspection device for animal X-ray inspection.
- the imaging region can be freely selected, so that most inspections can be handled.
- the above-described items (1) and (3) and an X-ray outside-portion imaging device which will be described later as an example in the present embodiment, can be brought into the home by using a lightweight movable structure. Can be deployed. Of course, it is also possible to provide dental care in a region without a dental clinic by mounting it in a small car.
- the present invention can be applied to the following apparatuses for nondestructive inspection.
- Internal structure inspection device such as small package, metal internal structure, food, flexible mounting board, IC, etc. Since reconstruction can be performed on a three-dimensional arbitrary surface in the inspection dome, the three-dimensional structure can be inspected depending on the nature of the non-inspection object. It is also possible to identify a substance by irradiating the detector with a photon counting type detector or two energy X-rays.
- Baggage inspection device at the airport By scanning the baggage inside the inspection dome stepwise, it can be inspected at a lower dose and faster than CT.
- (10) Assembled object inspection device Three-dimensionally inspecting the structure of an assembled object arranged three-dimensionally, and by specifying the reconstructed surface freely, internal inspection of a specific part of a standardized structure is possible. It becomes possible.
- Paint X-ray inspection device An inspection device for analyzing the interior of an uneven painting. This can be done by constructing a large dome to some extent.
- the X-ray tube 31 is electrically connected to the high-voltage generator 12, whereby the X-ray tube 31 is supplied with a high voltage for X-ray exposure.
- the electric motor 42 that moves the X-ray tube 31 is connected to a driver 46 ⁇ / b> A via a control line 45, and this driver 46 ⁇ / b> A is connected to the computer 11.
- the detector 32 is connected to the computer 11 via a collection line 47.
- the electric motor 52 that moves the detector 32 is connected to a driver 46B via a control line 48, and this driver 46B is connected to the computer 11.
- the drive unit 34 for moving the collimator 33 is also connected to the driver 46 ⁇ / b> C via the control line 49, and this driver 46 ⁇ / b> C is connected to the computer 11.
- the high voltage generator 12 controls the X-ray exposure conditions such as the tube current and the tube voltage for the X-ray tube 31 and the sequence of the exposure timing by a control signal given from the computer 11.
- the computer 11 is composed of, for example, a personal computer capable of storing a large amount of image data in order to handle a large amount of image data including the collected frame data. That is, the computer 11 includes, as its main components, an interface 51, a buffer memory 52, an image memory 53, an image processor 54, a CPU 55 as a controller, a ROM 56, A RAM 57 and a frame memory 58 are provided. Further, the computer 11 includes another interface 59, and is connected to the monitor 60 and the operation device 61 via this interface 59. Note that the interface 51 is also connected to a patient monitor 62 through which an image such as a panoramic image or an image explained to a doctor can be viewed.
- the buffer memory 52 temporarily stores digital frame data received from the detector 32 via the interface 51.
- the image processor 54 is placed under the control of the CPU 55 and interactively executes a process for creating a panoramic image of the 3D reference tomographic plane SS, which will be described later, and a later use of the panoramic image. It has a function.
- a program for realizing this function is stored in the ROM 56 in advance.
- the ROM 56 functions as a recording medium for storing programs.
- a LUT Look Up Table
- a reference function for calculating a tube current I correction characteristic (to be described later) and a rotation angle ⁇ of the X-ray tube 21 and the detector 32 is stored in advance in the LUT.
- This program may be stored in the ROM 56 in advance. However, in some cases, the program may be installed from an external system into the work area of the controller 55 via the RAM 57 using a communication line or a portable memory. Also good.
- Data such as frame data and image data processed by the image processor 54 or being processed is stored in the image memory 53 so as to be readable and writable.
- the image memory 53 for example, a large-capacity recording medium (nonvolatile and readable / writable) such as a hard disk is used.
- the frame memory 58 is used to display reconstructed panorama image data, panorama image data to be post-processed, and the like.
- the image data stored in the frame memory 58 is displayed on the screen of the monitor 60 at a predetermined cycle.
- a controller (CPU) 55 controls the overall operation of the components of the apparatus in accordance with a program that is preliminarily stored in the ROM 56 and handles the entire control and processing. Such a program is set so as to interactively receive operation information for each control item from the operator. Therefore, the controller 55 is configured to be able to execute collection (scanning) of frame data and the like, as will be described later.
- the jaw of the patient P is positioned inside the scan unit 10, that is, in the imaging space IS without moving.
- the X-ray tube 31, the collimator 33, and the detector 32 rotate along the ring body 21, that is, along the trajectory OB.
- the high voltage generator 12 supplies a high voltage for exposure (specified tube voltage and tube current) to the X-ray tube 31 in a pulse mode with a predetermined cycle under the control of the controller 55.
- the X-ray tube 31 is driven in the pulse mode.
- pulsed X-rays are emitted from the X-ray tube 31 at a predetermined cycle.
- This pulse drive may use a half-wave rectified drive signal or a DC drive type drive signal using an inverter circuit.
- the X-rays pass through the patient's jaw (dental portion) located at the imaging position and enter the detector 32.
- the detector 32 directly detects incident X-rays, and sequentially outputs corresponding two-dimensional frame data (eg, 64 ⁇ 1500 pixels) of digital quantity at a very high frame rate (eg, 300 fps). To do.
- the frame data is sent to the computer 11 via the communication line 47 and temporarily stored in the buffer memory 52 via the interface 51.
- the temporarily stored frame data is then transferred to the image memory 53 and stored.
- two-dimensional panoramic images that are often used for medical treatment in the past and pseudo three-dimensional panoramic images (transmission images) reconstructed along the contours of the jaws are applied by the tomosynthesis method. Reconfigured.
- the jaw of the subject P is positioned in the imaging space IS inside the ring body 21. Therefore, the X-rays emitted from the X-ray tube 31 are collimated by the collimator 33 and are irradiated toward the subject P as an X-ray beam XB.
- the X-ray beam XB passes through the jaw of the subject P, enters the detection surface of the detector 32, and is directly converted into an electric signal of a digital quantity for each pixel by the X-ray detection elements arranged on the detection surface.
- the frame data is output from the detector 22 at a high frame rate as described above.
- This frame data is collected intermittently (for example, every 300 fps) at predetermined intervals while the X-ray tube 31 (and the collimator 33) and the detector 32 move along the orbit OB.
- the X-ray tube 31 and the detector 32 rotate around the jaw while being positioned diagonally opposite each other or facing each other across the forehead portion of the subject P. It is characterized by that. “The X-ray tube 31 and the detector 32 face each other” means the central axis of the X-ray beam XB irradiated from the X-ray tube 31 (the central axis of the beam spread when the X-ray beam is projected onto the XY plane) ) Means a state orthogonal to the detection surface of the detector 32.
- the X-ray tube 31 and the detector 32 face each other obliquely means that the central axis of the X-ray beam is not at an angle other than 90 ° with respect to the detection surface of the detector 32 (0 ° ⁇ angle ⁇ 90 °. ).
- dental panoramic imaging devices are also required to provide high-resolution images and to save power and be small and light.
- the scanning unit that is, in this embodiment, the trajectory in which the X-ray tube 31 and the detector 32 move in the scanning apparatus 10 is circular.
- the circular orbit OB is formed by the ring body 11.
- the diameter of the ring body 11 is made as small as possible.
- the ring body 11 only needs to be large enough to accommodate the head of the subject because the imaging target is the jaw and further the dentition.
- the ring body 11 has an inner diameter of about 240 mm, for example, and has an outer diameter of about 270 mm. That is, the diameter of the track OB is about 270 mm as an example.
- the scanning device 10 can be reduced in size and weight as compared with the conventional one.
- the center of the circular orbit OB that is, the distance from the rotation center O to the X-ray tube 31 and the rotation center O to the detector 32.
- the distances are equal.
- the trajectory according to the present invention is not necessarily limited to this, and the distance from the rotation center O to the X-ray tube and the distance from the rotation center O to the detector may be different from each other. That is, the X-ray tube and the detector can independently rotate along two circular orbits having different diameters. In this case, it is easier in design if the two circular orbits are coaxial.
- the intensity of X-rays irradiated by the X-ray tube 31 can be reduced if the same X-ray dose is assumed.
- the X-ray intensity itself attenuates in proportion to the square of the distance, and if the same detector width and pixel size, the attenuation is equivalent to the cube of the distance.
- the required X-ray intensity can be reduced.
- the distance between the X-ray tube 31 and the detector 32 is designed to be smaller than that of the conventional panoramic imaging apparatus, and the current I flowing through the X-ray tube 31 is set to a value of about 750 ⁇ A. It can be suppressed.
- the value of this current I is about 1/10 or less of the conventional value. For this reason, a separate room (radiation imaging room) as a radiation management area, which was necessary in the case of the conventional panoramic imaging apparatus, is not necessary, and the radiation management area is made into an imaging space IS in which the X-ray tube 31 and the detector 32 rotate. Can be stopped.
- the scanning device 10 can be attached to the patient P being treated, a tomographic image of the dentition can be acquired while performing the treatment (while the patient P is not sitting on the treatment chair).
- the X-ray tube current I is small, the exposure dose is also reduced, so that the whole body is pre-scanned roughly without requiring skill, and the headrest is controlled so that the angle of the jaw is optimally positioned and the treatment site is accurately determined. It is also possible to perform a variety of shooting such as scanning.
- the X-ray extraoral imaging apparatus 1 reconstructs an image of a tomographic plane along a dentition that forms a horseshoe shape of the jaw of the subject by the tomosynthesis method.
- the position of the dentition TR is not located at the geometric center O in the XY plane of the scanning device 10 but is closer to the front side of the jaw.
- a cervical vertebra CS as an obstacle at the time of scanning is located behind the dentition TR. Even if the dentition TR itself is taken, there is an overlap of teeth.
- route of the X-ray beam XB is selected for every X-ray irradiation angle (theta) so that the overlap may not be reflected as much as possible, and as much as possible avoids the cervical vertebra CS, and may pass along a dentition.
- the path takes a value that is orthogonal or close to orthogonal to the dentition TR (note that “orthogonal” means “the X-ray beam passes between the teeth. "I want to do it", not necessarily 90 degrees). For this reason, scanning along such a path is called so-called orthogonal imaging.
- the path of the X-ray beam XB is set as shown in FIG. 3, for example.
- FIG. 3 shows an X-ray tube 31, a detector 32, a dentition TR of the jaw of the subject P, and a 3D (three-dimensional) reference tomographic plane SS along the dentition TR.
- the positional relationship for each X-ray irradiation angle (scan angle) ⁇ with the path of the X-ray beam XB is projected onto the XY plane.
- the 3D reference tomographic plane SS is called as such in the sense of pseudo three-dimensional because the tomographic plane adopted as the reference plane is not a mere plane but has a three-dimensional space spread. .
- the “X-ray beam” is an X-ray that is emitted from the X-ray tube 31 and collimated by the collimator 33.
- the (path) direction of the X-ray beam (that is, the X-ray irradiation angle) is the X-ray focal point of the X-ray tube 31 and the center position of the X-ray incident on the detection surface of the detector 31 (projected on the XY plane in FIG. 3). The direction of the line connecting the center position).
- the position and direction of the X-ray beam path are set so as to vary depending on each position along the tooth row TR.
- the contour (shape) when this dentition TR is projected onto the XY plane has individual differences. For this reason, in the present embodiment, a statistically standard contour is adopted.
- This standard contour is substantially horseshoe-shaped, and is also known, for example, from the document “R. Molteni,“ A universal test phantom for dental panoramic radiography ”MedicaMudi, vol. 36, no.3, 1991”.
- a 3D reference tomographic plane SS is set along this contour.
- the 3D reference tomographic plane SS is a cross-section (virtual plane) having a pseudo three-dimensional expansion that rises along the Z-axis direction from the illustrated position.
- the 3D reference tomographic plane SS is prepared in advance on the apparatus side.
- the 3D reference tomographic plane SS may be selected from a plurality of tomographic planes prepared in advance on the apparatus side before imaging. That is, although it is a fixed cross section as the 3D reference tomographic plane SS, the position of the 3D reference tomographic plane SS can be changed within a certain range in the depth (front-rear) direction of the dentition by such a selection operation. It may be.
- the path direction (that is, the X-ray irradiation direction) at each X-ray irradiation angle ⁇ is set so that the path of the X-ray beam XB passes through the cervical spine as much as possible.
- the path of the X-ray beam XB is set with priority given to avoiding the influence of the tooth overlap and the cervical spine as a noise component.
- the X-ray irradiation angle ⁇ corresponds to a rotation angle when viewed from the X-ray tube unit 31U and the detector unit 32U. For this reason, this angle ⁇ is also a rotation angle, an X-ray irradiation angle, and a scan angle. Hereinafter, this angle ⁇ is properly used as necessary.
- the X-ray beam XB path setting method that emphasizes orthogonal imaging shown in FIG. 3 is representative of setting a desired path position, and the path of the X-ray beam XB is not necessarily set at each position of the dentition. Does not mean that it is exactly orthogonal to the dentition, and does not mean that the setting of a path for photographing other than the above-described orthogonal photographing is excluded.
- the X-ray tube 31 (collimator 33) and the detector 32 are located at the center position of the front tooth portion of the dentition TR, as can be seen from FIG. Facing each other. That is, the path of the X-ray beam XB passes through the geometric center O of the ring body 12. However, as the path of the X-ray beam XB moves from the center position of the front tooth toward the left and right molar parts, the path passes along a trajectory deviating from the geometric center O. Furthermore, the path moves so as to approach the center O as it proceeds to the back of the molar part. In the present embodiment, this path passes through the center O again.
- the path of the X-ray beam XB is set so that “orthogonal imaging” can be performed by giving priority to the shape of the dentition TR to be imaged over the geometric center O.
- the X-ray tube 31 (and the collimator 33) and the detector 32 can be rotated independently of each other along the circular orbit OB, and the collimator 33 is moved with respect to the X-ray tube 11. It is configured to be movable.
- the dentition TR is not positioned at the geometric center O of the ring body 12, the X-ray tube 31 and the detector 32 are moved along the circular orbit OB, and orthogonal imaging is performed.
- the distance between the dentition TR and the X-ray tube 31 changes greatly for each value of the X-ray irradiation angle ⁇ . That is, the enlargement ratio when the dentition is scanned changes for each X-ray irradiation angle ⁇ .
- the enlargement ratio is the ratio between the actual size of the tooth and the size of the projected image formed on the detection surface of the detector 32 by the shadow of the tooth. This will be described with reference to FIG. For this reason, the image processing method described above also includes processing for eliminating or reducing the influence of the enlargement ratio. This will be described later together with the overall image reconstruction process.
- the X-ray tube 31 and the detector 32 rotate independently of each other along a circular orbit OB having a geometric center O (fixed).
- the path of the X-ray beam XB at each position of the rotation angle ⁇ does not necessarily pass through the geometric center O. It can be said that the path of the X-ray beam XB is set without being trapped by the geometric center O by giving priority to orthogonal imaging rather than passing through the geometric center O.
- the path of the X-ray beam XB passing through the geometric center O passes through one point in the central part of the anterior tooth and one point in each of the left and right molar parts during a single scan. It is only a place (see FIG. 3).
- the rotational angular velocity V ⁇ of the detector 32 moving on the track OB is controlled according to the position on the track OB. Therefore, for example, as shown in FIG. 5, the rotational angular velocity V ⁇ A when the detector 32 passes through a certain angle range A (part of the molar portion) passes through another angle range B (part of the front tooth portion). greater than the rotational angular speed V [theta] B to.
- the X-ray beam XB is incident at regular intervals. This means that the number of photons of X-rays incident on the detector 32 changes according to the position of the orbit OB.
- the tube current I depends on the rotational position of the detector 32 on the trajectory OB, that is, the rotational position of the counterpart X-ray tube 31 on the trajectory OB. Is adjusted.
- the angle range facing the tube current I A of the X-ray tube 31 when moving the angular range A'facing the angular range A in orbit OB the different angle ranges B B' Is relatively lower than the tube current I B that moves.
- the characteristic of the rotation angle ⁇ versus the tube current I is generally expressed as shown in FIG. That is, when scanning the left and right molar parts, the value of the tube current I is increased compared to when scanning the front tooth part.
- the maximum value of the tube current I is set to a value that does not require the above-described separate room (radiation imaging room).
- the correction characteristic of the tube current I shown in FIG. 8 is stored in advance in a ROM lookup table described later.
- the tube current I is also controlled for each X-ray irradiation angle.
- the path of the X-ray beam XB is set so as to capture the desired scan angle ⁇ while avoiding the cervical spine as much as possible. Is difficult to set.
- the path of the X-ray beam XB through the cervical spine is included. Therefore, when the X-ray beam is irradiated along the path passing through the cervical spine, the tube current I may be controlled so as to increase the X-ray intensity accordingly.
- the tube voltage applied to the X-ray tube 21 may be adjusted instead of or together with the method for adjusting the tube current as described above.
- the tube voltage is increased, the number of X-ray photons increases.
- the tube voltage is decreased, the number of photons decreases, so that the same adjustment function as that of the tube current can be exhibited.
- the acquisition time of X-ray transmission data may be controlled. This concept will be described with reference to FIGS.
- the X-ray tube 31 moves a distance xi along the trajectory OB, and the detector 32 is also the same. It moves by a distance of di along the trajectory OB.
- the value of the predetermined time Ti may be determined so that the count of the number of photons in the detector 32 is substantially the same.
- the position and orientation of the collimator 33 are also controlled according to the line connecting the X-ray tube 31 and the detector 32, that is, the X-ray irradiation direction as described above.
- the position of the collimator 33 refers to the position along the XY plane perpendicular to the direction of the X-ray beam XB with respect to the X-ray tube 31 of the collimator 33.
- position of the collimator 33 means the attitude
- the reason why the position and orientation of the collimator 33 are controlled in this way is that the position of the detector and the X-ray tube is not always opposite because the scanning method in the present embodiment realizes the panoramic imaging described above in a circular orbit. It depends on not. This is based on the fact that the scanning method in the present embodiment is based on the above-described orthogonal imaging. If the X-ray tube 31 and the detector 32 are always facing each other, the position and posture of the collimator 23 may be fixed. However, as can be seen from FIG. 3, the detector 32 is positioned relative to the X-ray tube 31 at most rotation angle ⁇ positions except for the center of the front tooth portion of the dentition TR and each point on the left and right molar portions.
- the position and / or orientation of the collimator 33 is required to accurately make the X-ray beam XB incident on the detection surface of the detector 32. Need to be controlled appropriately.
- the collimator 33 may control only one of the position and orientation according to the rotation angle ⁇ of the X-ray tube 21 for convenience.
- the scanning apparatus 10 detects that the rotation sensors 36 and 37 that detect the rotational positions of the X-ray tube 31 and the detector 32 and the jaw of the subject P have moved to scan.
- a motion sensor 38 is provided.
- the rotation sensors 36 and 37 may be obtained by calculation from the number of pulses of the motor driving pulse signal instructed by the controller.
- a rotation control pattern in which the horizontal axis is the rotation angle ⁇ and the vertical axis is the rotation angular velocity V ⁇ is stored in advance in the LUT of the ROM 56 described later as a reference function.
- this rotation control pattern is an X-ray tube 31, a detector 32, and a detector that are necessary for achieving so-called “orthogonal imaging” and reducing lateral density unevenness of a panoramic image.
- This is a reference function that defines the positional relationship of the dentition TR of the jaw of the subject P for each rotation angle ⁇ . Therefore, the reference function is based on at least one of the tube current adjustment factor and the data collection time adjustment factor among the above-described density unevenness countermeasures in addition to the speed control factor necessary for orthogonal imaging. Are prescribed in advance.
- FIG. 12A defines the rotational angular velocity V ⁇ for each rotational angle ⁇ that the X-ray tube 31 should take.
- FIG. 12B defines a rotational angular velocity V ⁇ for each rotational angle ⁇ that the detector 32 should take.
- the graph that defines the rotation angle ⁇ the rotation angular velocity V ⁇ is set so that the magnitude relationship draws a trajectory opposite or close to that of FIG.
- ⁇ Scan> Furthermore, a pre-scan for checking the jaw angle and a main scan for data collection performed in the X-ray extraoral imaging apparatus 1 according to the present embodiment will be described.
- Pre-scan In this X-ray extraoral imaging apparatus 1, since the amount of X-ray exposure to the patient in one scan is small, the pre-scan is performed prior to the main scan to collect image data (frame data) for actual medical treatment. Perform a scan. Even when pre-scanning is performed, the patient's X-ray exposure can be kept low. Pre-scanning is a method of collecting data at a high speed by reducing the current by reducing the pixel size.
- the controller 55 When this pre-scan is started, the controller 55 first reads position information from the position detectors 36 and 37 in step S1, and calculates the positions of the X-ray tube 31 and the detector 32 on the trajectory OB. Next, in step S2, the controller 55 determines whether or not the calculated position is an initial position. If the calculated position is not the initial position, the process proceeds to step S3. In step S3, the motors 42 and 52 are rotated to return the X-ray tube 31 and the detector 32 to the preset initial positions on the orbit OB. In this case, the position and posture of the collimator 33 with respect to the X-ray tube 31 are fixed at a predetermined position.
- the controller 55 monitors the operation signal of the operator transmitted from the operation device 61 in step 4. While waiting, it is determined whether or not to start pre-scanning.
- step S4 determines whether the operator commands the start of scanning.
- prescan conditions are not necessarily the same as the main scan conditions, and various conventionally known panoramic image processing methods may be set.
- step S6 the controller 55 again reads the rotational position information from the position detectors 36 and 37, and calculates the current rotational position along the trajectory OB of the X-ray tube 31 and the detector 32.
- step S7 the controller 55 determines whether or not the scan is completed based on this rotational position. That is, whether or not the X-ray tube 31 and the detector 32 have both moved along a trajectory OB while moving within a set rotation angle (for example, 210 °) and have reached the end point of a predetermined rotation position. Determine whether.
- a set rotation angle for example, 210 °
- step S7 determines whether the end point has been reached. If the determination in step S7 is YES, that is, the end point has been reached, the controller 55 returns the X-ray tube 31 and the detector 32 to their initial positions on the trajectory OB in steps S8 and S9 in the same manner as described above. End scanning control.
- step S7 that is, if the X-ray tube 31 and the detector 32 have not yet reached their end points, the process returns to step S6 and is repeated.
- the image processor 54 applies the tomosynthesis method at the time of main scanning, which will be described later, to the prescan frame data collected in this way.
- the three-dimensional (pseudo-pseudo) that is automatically optimally focused along the direction in which the focus of the X-ray tube is always taken in consideration of the spatial actual position of the object.
- Reconstruct a 3D panoramic image The reconstructed three-dimensional panoramic image is formed by bundling four adjacent pixels into one at each position on the image.
- the panoramic image is reduced in size and has a rough image quality, but it is sufficient for position confirmation of the tooth row TR and the like. Since the X-ray dose doubles the scanning speed and the tube current becomes 1/2, the total X-ray dose becomes 1/4. Thereby, X-ray exposure amount also decreases.
- the operator observes the reconstructed three-dimensional panoramic image and confirms whether or not the dentition TR is accurately captured or the angle of the jaw (neck) is accurate. If necessary, correct the jaw positioning.
- the chin since the cervical vertebra CS is reflected in this panoramic image, the chin (so that the X-ray beam from the X-ray tube 31 when passing around the back passes as much as possible between the cervical vertebra CS and becomes a good image. Also correct the angle of the neck.
- the controller 55 reads a scan control program stored in advance in the ROM 56 into the work area and sequentially executes the program.
- step S11 the controller 55 first reads position information from the position detectors 36 and 37 in step S11, and calculates the positions of the X-ray tube 31 and the detector 32 on the orbit OB.
- step S12 the controller 55 determines whether or not the calculated position is an initial position. If the calculated position is not the initial position, the process proceeds to step S13.
- step S13 the motors 42 and 52 are rotated to return the X-ray tube 31 and the detector 32 to the preset initial positions on the orbit OB.
- the controller 55 monitors the operation signal of the operator transmitted from the operation device 61 in step 14. While waiting, it is determined whether or not to start the main scan.
- step S14 If the determination in step S14 is YES, that is, if the operator instructs the start of the main scan, the controller 55 shifts the process to step S15, and sets the reference functions (rotation patterns) of the X-ray tube 31 and the detector 32, respectively. Read from the LUT of the ROM 56 and start the main scan based on the reference function.
- this reference function as shown in FIGS. 12A and 12B, the horizontal axis represents the rotational position ⁇ and the vertical axis represents the rotational angular velocity V ⁇ .
- step S16 the controller 55 again reads the rotational position information from the position detectors 36 and 37, and calculates the current rotational position along the trajectory OB of the X-ray tube 31 and the detector 32.
- step S17 the controller 55 determines whether or not the scan has ended based on this rotational position. That is, whether or not the X-ray tube 31 and the detector 32 have both moved along a trajectory OB while moving within a set rotation angle (for example, 210 °) and have reached the end point of a predetermined rotation position. Determine whether.
- a set rotation angle for example, 210 °
- step S17 If the determination in step S17 is YES, that is, the end point has been reached, the controller 55 returns the X-ray tube 31 and the detector 32 to their initial positions on the orbit OB in steps S18 and S19 as described above. End scanning control.
- step S17 that is, if the X-ray tube 31 and the detector 32 have not yet reached their end points
- the controller 55 proceeds to the process of step S20.
- the rotational angular velocity V ⁇ corresponding to the current rotational position ⁇ of the X-ray tube 31 and detector 32 detected in step S16 is calculated. That is, the controller 55 refers to the LUT in the ROM 56 and applies the current rotational position ⁇ to the functions shown in FIGS. 12A and 12B, thereby determining the rotational angular velocity V ⁇ to be commanded at present.
- step S21 the controller 55 calculates the tube current I supplied to the X-ray tube 21 according to the current rotational position ⁇ .
- the intent of this calculation is to correct the difference in the number of X-ray photons detected by the detector 22 as described above. Note that, as described above, when the change in density unevenness can be sufficiently suppressed in the data collection time, the tube current I adjustment process need not be executed.
- step S22 the controller 55 calculates a command value for controlling the position / posture of the collimator 33 using the rotation angle ⁇ of the X-ray tube 31 and the detector 32 obtained in step S20 described above.
- This command value is calculated as a drive signal for the drive unit 34 that drives the collimator 33.
- the rotational speed V of the X-ray tube 31 and the detector 32, the tube current I of the X-ray tube 31, and the command value of the position / posture of the collimator 33 are obtained. Is given to the motors 42, 52, 34 and the high voltage generator 12.
- the X-ray tube 31 receives a pulse drive signal from the high voltage generator 12 according to the predetermined tube voltage V and the calculated tube current I, and generates X-rays having the intensity and the number of photons according to the drive signal. Further, the X-ray tube 31 and the detector 32 move (rotate) along the orbit OB at mutually independent rotational speeds by, for example, pulse driving of the motors 42 and 52.
- the X-ray beam irradiated from the X-ray tube 31 is collimated by the collimator 33 so that the detection surface of the detector 32 can be accurately directed.
- the X-ray beam XB can always reliably enter the detection surface of the detector 32.
- step S16 the processing of the controller 55 is returned to step S16, and the above-described steps S16 to S23 are repeated until the scan is completed and the initial position is returned.
- the X-ray tube 31 and the detector 32 (and the collimator 33) in the initial position start to move on the circular orbit OB with the start of the rotational drive (FIG. B)). While performing this movement, X-rays are emitted from the X-ray tube 31 at regular intervals.
- the path of the X-ray beam XB is a path dedicated to predetermined orthogonal imaging or the like, and is set to be orthogonal to the dentition TR as much as possible.
- the X-ray tube 31 and the detector 32 move so as to go around the front side of the jaw of the subject P (FIGS. 15C and 15D).
- the controller 55 also constantly monitors the signal of the motion sensor 38, and when the movement of the subject P is detected, the scan is stopped in response to an instruction from the operation device 61 or a separate emergency switch (not shown). And warn of this. As a result, re-imaging can be performed when the subject P moves annoyed by the scan, or when the subject P moves carelessly and image quality cannot be guaranteed.
- 3D reconstruction is performed that accurately grasps the actual position of the dentition in the imaging space IS, as will be described later.
- the projection is performed from the 3D reference tomographic plane SS along the oblique irradiation direction of the X-rays sandwiching the X-ray tube 31, and an imaging target (entity) such as a dentition is projected.
- an imaging target such as a dentition is projected.
- a three-dimensional position is identified with high accuracy.
- imaging including the process of position identification will be described.
- This calibration is characterized in that a phantom that imitates the dentition of the subject P is used in this embodiment.
- FIG. 16 shows a partially broken appearance of the phantom (phantom device) 101.
- This phantom 101 is a universal phantom capable of measuring parameters necessary for such calibration in one piece.
- the phantom according to the present invention is not necessarily limited to this all-purpose phantom, and various forms are possible as long as parameters necessary for 3D image reconstruction can be calibrated as will be described later. Of course, it can be deformed. Some of these variations are also described later.
- the universal phantom 101 includes a plate-like base 111 and a top plate 112 made of a transparent resin, and a plurality of support columns 113 sandwiched between the base 111 and the top plate 112. These columns 113 (113 ′) are provided with metal markers having X-ray transmittances different from those of the resin material, as will be described later.
- the kind of resin is an acrylic resin, for example, the X-ray transmittance should just differ from that of a marker.
- the resin is transparent because the marker is easy to see.
- Each of the pillars 113 (113 ′) is fixed by inserting upper and lower ends thereof into the base 111 and the top plate 112. This will be described in detail below.
- the base 111 has a square plate shape as shown in FIGS. 16 and 17 and is made of a transparent resin member.
- the reference plane trajectory ORs when the three-dimensional reference tomographic plane SS is projected onto the XY plane and the reference plane trajectory ORs outside the reference plane trajectory ORs by a predetermined distance DS, for example, 20 mm.
- a predetermined distance DS for example, 20 mm.
- an outer surface trajectory ORouter drawn in parallel is set.
- a square planting hole 111A is formed. Note that the distance DS between the two orbits ORs and ORouter does not necessarily need to be set to 20 mm, and may be any value that can calculate parameters described later with higher accuracy within a limited size relationship.
- the plurality of columns 113 are each formed as a prism made of resin such as acrylic as shown in FIGS.
- Each column 113 includes a columnar column main body 113A having a fixed length, and a quadrangular columnar projection 113B integrally projecting from the upper and lower ends thereof.
- pillar main bodies are the cross-sectional sizes orthogonal to the longitudinal direction, for example, are 5 mm x 5 mm, and the length is 92 mm.
- the size of each protrusion 113B is a cross section smaller than that of the column main body 113A, and has a length of about 5 mm, for example.
- 1st, 2nd, and 3rd markers 114, 115, and 116 for calibration are arranged on one side of each support body 113A.
- These markers 114, 115, and 116 are all small rods made of aluminum or brass, and the diameter thereof is, for example, 0.6 mm.
- the first and second markers 114 and 115 are disposed laterally at positions separated from the upper end and the lower end of the column main body 113A by a predetermined distance, for example, 10 mm and 15 mm, respectively.
- a semicircular cross-section with a diameter of 0.6 mm is put on the surface of the column main body 11A, and first and second markers 114 and 115 as small-diameter rods are fixed to the cut portion.
- the third marker 116 is fixed along the vertical direction centering on a position 30 mm away from the upper end of the column main body 113A, for example.
- the third marker 116 has a certain length, and the length is, for example, 20 mm.
- the third marker 116 is implanted in the same manner as the first and second markers 114 and 115 described above.
- the dimensions of the support pillar 113 and the marker position described above are merely examples, and can be designed with other appropriate dimensions.
- the phantom 113 ′ disposed along the outer surface track ORouter is configured as shown in FIG. 19.
- an interesting feature is that the phantom 113 shown in FIG. 18 is turned upside down to form the phantom 113 ′ in FIG.
- the second and first markers 115 and 114 are also positioned laterally near the upper and lower ends in each phantom 113 ′, and are positioned vertically at a position near the first marker 114. Since the marker installation method is exactly the same, when assembling the phantom 101, it is only necessary to change the direction upside down between the reference surface track ORs and the outer surface track ORouter. Can be lowered.
- the implantation direction and length of the first and second markers 114 and 115 and the third marker 116 are different from each other.
- the reason for this is that calibration requires measurement of different parameters, and different types of markers having shapes corresponding to the attributes of the parameters are required.
- the present embodiment is also characterized in that all necessary types of markers are efficiently and efficiently disposed in one phantom 101. Therefore, there is an effect that it is not necessary to use a plurality of phantoms according to the type of parameter.
- the first and second markers 114 and 115 are information on the distance relationship between the X-ray tube 31, the detector 32, the rotation center RC, and the 3D reference tomographic plane SS existing in the imaging space, and X-rays. This is a marker for obtaining information on the height position of the tube 31 with respect to the detector 32.
- the first, second, and third markers 114, 115, and 116 present in the reference plane trajectory ORs and the outer plane trajectory ORouter are reflected in the reference plane panorama image and the outer plane panorama image.
- the reference plane panorama image is depicted as shown in FIG. That is, from the geometrical relationship shown in FIG. 20B, the reference plane panoramic image has, from the top, the first marker 114 (ORs) in the reference plane trajectory ORs and the second in the outer plane trajectory ORouter.
- Marker 115 (ORouter), a third marker 116 (ORs) in the reference plane trajectory ORs, a third marker 116 (ORouter) in the outer plane trajectory ORouter, and a second marker in the reference plane trajectory ORs 115 (ORs) and the first marker 114 (ORouter) in the outer surface orbit ORouter are drawn in black in this order.
- the separation distance of the outer surface track ORouter from the reference surface track ORs and the vertical position of each marker are set so as to be drawn in such a sequence.
- the images of the markers 114 (ORouter), 115 (ORouter), and 116 (ORouter) in the outer surface track ORouter are more blurred than those images in the reference surface track ORs. If the panoramic image is reconstructed by changing the shift-and-add amount and focusing on the outer tomographic plane, the relationship between the degree of the blur, that is, whether or not the image is the optimum focus is reversed.
- the images of the four markers 114 (ORs), 115 (ORouter), 115 (ORs), and 114 (ORouter) are drawn as horizontal black lines, the X-ray tube 31, the detector 32, and the rotation center. It is used to measure the parameters of the distance relationship between the RC and the reference tomographic plane SS and the parameters of the height position of the X-ray tube 31 with respect to the detector 32.
- the phantom 101 can provide necessary and sufficient position information with a single scan regarding the distance and height of the imaging system in the imaging space. For this reason, this phantom 101 exhibits versatility capable of independently measuring different types of parameters.
- the top plate 112 is not necessarily provided.
- the markers 114, 115, and 116 are required to maintain a highly accurate spatial position for the plurality of support columns 113 implanted in the base 111. For this reason, in order to prevent the support
- the movement of the rotation center RC is generalized, that is, not limited to the case of moving along the above-described straight line, but generalized so that it can cope with any movement. explain.
- FIG. 21A shows a state of the X-ray tube 31 and the detector 32 that rotate (move) along the curved trajectories T S and T D that face each other around the substantially horseshoe-shaped dentition.
- X-ray tube 31 is rotated along one track T S
- the detector 32 is rotated along the other track T D. That is, the X-ray tube 31 and the detector 32 rotate as a pair, but the rotation center (rotation center) RC of the pair also moves.
- the example of FIG. 5A representatively shows a state where the rotation center RC moves.
- the rotational center RC of the pair of the X-ray tube 31 and the detector 32 is at the position O
- the focal position of the X-ray tube 31 is S 1
- the width direction of the detector 32 is
- the center position is C 1
- the rotation radius of the X-ray tube 31 (hereinafter, X-ray tube / rotation center distance) is R S
- the rotation radius of the detector 32 (hereinafter, detector / rotation center distance) is R D
- the rotation center distance from RC position O to the point Q with teeth hereinafter, the center of rotation, the reference tomographic plane distance) to D
- the distances Rs and Rd are fixed values.
- the distance the X-ray tube and rotating center distance Rs between the X-ray tube position S 2 rotational center position O and (S 2), and a rotating center position O (S 2) and the detector center position C2 Is the detector-rotation center distance Rd
- the distance between the rotation center positions O (S 1 ) and O (S 2 ) is ⁇ 1
- the rotation center position O (S 2 ) is reconstructed.
- the distance from the position Q is D- ⁇ 1
- the line segment perpendicular to the reconstructed position Q to the line segment O (S 2 ) -C 2 is (D- ⁇ 1 ) sin ⁇ 1
- the perpendicular line the distance between the intersection point B and the rotational center position O (S 2) becomes (D- ⁇ 1) cos ⁇ 1 .
- the left side ⁇ x / ⁇ Fi of the equation (4) is called a gain (change rate of shift and add amount).
- This gain ⁇ X / ⁇ Fi indicates the change rate of the shift and add amount in the tomosynthesis method (that is, shift and add operation) in which a plurality of frame data are shifted and added to each other.
- R S + R D in the right side of the equation (4) represents a distance between the detector and the X-ray tube (distance between the detector and the X-ray tube), and R S + (D ⁇ M) is “ The distance between the X-ray tube and the focal point (focal position / distance between X-ray tubes) corrected by the moving distance ⁇ 1 ”between the rotation center positions O (S 1 ) and O (S 2 ). ing. (D ⁇ M) represents the distance between the position of the new rotation center and the reconstruction point Q, which is subtracted by the moving distance ⁇ .
- the curve of gain ⁇ X / ⁇ Fi (hereinafter simply referred to as “gain curve”) is the detector-X-ray tube distance R S + R D , and the focal position / X-ray tube distance R S + (D ⁇ M).
- the distance between the rotation center and the reconstruction point (DM), and the angular velocity curve ⁇ / ⁇ Fi (see FIG. 27) representing the relationship between the frame data Fi and the rotation angle ⁇ . If this gain curve is integrated so that the center position of the front teeth becomes the center position of the image, a panoramic image in focus at a position of the distance D from the rotation center RC is reconstructed at each rotation angle. Can do.
- the magnitude of the above-described gain ⁇ X / ⁇ Fi is different in concept from that of a normal electric circuit or the like.
- the gain ⁇ X / ⁇ Fi is larger, the frame data are mutually exchanged.
- the overlay amount (shift amount) of the frame data when adding is small.
- the smaller the gain ⁇ X / ⁇ Fi the larger the overlay amount.
- the parameters listed here are In the structural analysis, the X-ray tube / rotation center distance R S , the X-ray tube / rotation center distance R S , the height B1 of the X-ray tube 31 with respect to the detector 32 in the Z-axis direction, and In the calibration, gain ⁇ x / ⁇ Fi, X-ray irradiation angle ⁇ , angular velocity curve ⁇ / ⁇ Fi, rotation center / reference tomographic plane distance D, correction term M, coordinates of moving rotation center RC on the XY plane (CX, CY ) It is.
- the calibration parameters “ ⁇ x / ⁇ Fi, ⁇ , ⁇ / ⁇ Fi, D, M, (CX, CY)” are stored and updated as a lookup table LUT of the input value Fi.
- Process 1 Phantom installation and X-ray imaging (scan) for calibration
- Process 2 Calculation of gain ⁇ x / ⁇ Fi profile
- Process 3 Calculation of X-ray irradiation angle ⁇ deviation (actual projection angle ⁇ ′))
- Process 5 Calcululation of parameters Rs, Rd, B1
- Process 6 calculation and update of parameters ⁇ x / ⁇ Fi, ⁇ , ⁇ / ⁇ Fi, D, M, (CX, CY): calibration
- Process 7 (3D reconstruction by extracting the actual position of the dentition) Is mentioned.
- This processing is executed in the flowchart shown in FIG. 23, which is executed by the controller 55 and the image processor 54 in cooperation. This will be described along this flowchart.
- the controller 55 instructs the operator with a screen or a voice to install the phantom 101 at a predetermined position in the imaging space IS of the X-ray extraoral imaging apparatus 1 (step S31).
- This predetermined position is the position of the chin rest 25 on which the patient P places his / her chin during imaging.
- the controller 47 instructs the operation device 58 to execute the calibration scan (step S32).
- the controller 55 reads the calibration scan program stored in advance in the ROM 61 into the work memory.
- the controller 55 rotates the X-ray tube 31 with the collimator 33 and the detector 32 around the phantom.
- pulsed X-rays are exposed from the dotted X-ray focal point of the X-ray tube 31.
- This pulse X-ray is collimated by the collimator 33 to become a fan-shaped X-ray beam.
- This X-ray beam passes through the phantom and enters the detection surface of the detector 32.
- the detector 32 detects X-rays through the phantom, and outputs digital electric quantity frame data corresponding to the X-rays at regular time intervals (for example, 300 fps).
- the X-ray tube 31 and the detector 32 do not simply go around the phantom, but follow the trajectory away after the position of the rotation center RC on the line connecting the two approaches the front side of the phantom. Rotate. In other words, during actual scanning, the closer to the front teeth of the dentition, the closer the rotation center RC approaches the dentition and the position of the rotation center RC shifts.
- the rotational positions and angular velocities of the X-ray tube 31 and the detector 32 are individually controlled so as to allow this movement.
- the frame data output from the detector 32 is temporarily stored in the buffer memory 53.
- the image processor 53 reconstructs a reference plane panoramic image of the reference tomographic plane SS based on the tomosynthesis method using the frame data (step S33).
- the image processor 54 obtains the gain ⁇ X / ⁇ Fi (step S34).
- a pillar marker of the phantom 101 arranged at each reference plane position following the trajectory along the reference tomographic plane SS for each X-ray irradiation angle ⁇ is depicted at the center.
- the frame data number Fi 0 is determined. This determination may be made while the operator visually observes the reference plane panoramic image.
- the phantoms of the pillars arranged at every X-ray irradiation angle ⁇ are naturally reflected in the outer surface position that follows the trajectory of the tomographic surface 20 mm outside the reference tomographic surface SS.
- a superimposition amount (shift and add amount) X of the frame data Fi that is most focused on the phantom of each support column at the reference plane position is obtained.
- the operator operates the controller 58 while observing the reference plane panoramic image, and repeats the method of observing the blur of the image by superimposing the frame data Fi on both sides of the central frame data Fi 0 by trial and error. Decide.
- the center frame data Fi 0 corresponding to the markers of the respective struts along the reference tomographic plane SS and the optimum overlay amount X are determined, these data are smoothly connected to form the overlay amount profile Px.
- a gain ⁇ X / ⁇ Fi for each set value of the X-ray irradiation angle ⁇ is obtained from the profile Px.
- the image processor 54 receives an instruction on the degree of calibration based on an instruction from the controller 55.
- the calibration of the X-ray irradiation angle ⁇ is not performed, and a simple calibration that adopts the design value of the X-ray irradiation angle ⁇ that the system has in advance and the phantom 101 are scanned.
- a detailed type of calibration that also calibrates the X-ray irradiation angle ⁇ from the panoramic image obtained in this way is prepared in advance.
- the controller 55 obtains information from the operator in advance, for example, whether to perform simple type calibration or detailed type calibration through image display on the monitor 60.
- the image processor 56 receives an instruction from the controller 55 and determines whether the calibration is a simple type or a detailed type (step S35).
- the deviation of the X-ray irradiation angle ⁇ that is, the actual irradiation angle ⁇ ′ is calculated from the panoramic image.
- step S34 on the reconstructed reference plane panoramic image, the pillar markers arranged at every X-ray irradiation angle ⁇ along the outer surface position along the tomographic surface 20 mm outside the reference tomographic surface SS.
- a gain ⁇ X / ⁇ Fi for each X-ray irradiation angle ⁇ and a profile of the gain ⁇ X / ⁇ Fi are generated.
- an outer side panoramic image of a cross section 20 mm outside the reference tomographic plane SS is reconstructed.
- the physical center position in the lateral direction (lateral direction on the two-dimensional reference plane panoramic image) of each phantom 113 ′ at the outer surface position is determined. This determination is also made while the operator visually observes the panoramic image.
- step S34 the center frame data number Fi 0 used by the markers of the columns at the reference plane position has already been determined. Therefore, the position of the marker in the lateral direction (lateral direction on the two-dimensional reference plane panoramic image) in the outer side panoramic image with respect to the center frame data (see FIG. 24A) and the marker 116 at the outer side surface position. From the horizontal position in the outer side panoramic image (see FIG. 24B), the amount of shift Pshift on the image between them is calculated. The shift amount Pshift is converted into the actual shift amount L (see FIG. 24C).
- the shift amount Pshift of the actual irradiation angle ⁇ ′ with respect to each X-ray irradiation angle ⁇ in increments of a predetermined value can be obtained.
- An example of the shift amount Pshift is shown in FIG.
- the shift amount ⁇ shift of the actual irradiation angle ⁇ ′ from each X-ray irradiation angle ⁇ has already been obtained. For this reason, the irradiation angle ⁇ ′ of the marker existing on the reference tomographic plane SS is obtained from the shift amount ⁇ shift.
- the design value ⁇ that is simply adopted is used as it is.
- the height information B1 is calculated from the panoramic image as a constant parameter (step S39).
- the X-ray tube 31 and the detector 32 are disposed to face each other, and the rotation center RC and the reference tomographic plane SS are located therebetween. It is assumed that there are two markers 114 and 115 separated from each other by 67 mm vertically at the position of the reference tomographic plane SS.
- the X-ray focal point of the X-ray tube 31 is small enough to be regarded as a point light source (for example, a diameter of 0.5 mm). Further, the X-ray irradiation angle ⁇ is assumed to be 0 °.
- the X-ray beam focused by the collimator 33 is irradiated to the center portion of the front teeth of the dentition assumed to exist on the reference tomographic plane SS.
- the X-ray beam passes through the two markers 114 and 115 through the oblique and creates projection points at the heights B2 and B3 of the detection surface of the detector 32. That is, the positions of the markers 114 and 115 are enlarged in the vertical direction (Z-axis direction) to create projection points B2 and B3 as images.
- the lowest position of the detection surface of the detector 32 is set as the origin of the coordinate 0, and the height of the X-ray focal position is B1 from the horizontal plane (XY coordinate plane) passing through this point. Therefore, on the detection surface of the detector 32, the origin of the coordinate 0, the X-ray focal point height B1, and the projection heights B2 and B3 of the markers 114 and 115 are arranged in order from the bottom.
- the X-ray irradiation angle ⁇ is an angle other than 0 degree, the above-described formulas (6) and (8) are established. Therefore, based on these equations, the projection images B3 (D) and B2 (D) created by the markers 114 and 115 at the respective angles ⁇ at the positions B2 and B3 are obtained, so that the rotation center and reference at each irradiation angle ⁇ are obtained.
- the tomographic plane distance D is calculated (step S40). If this distance D is known, the position coordinates (CX, CY) of the rotation center RC are also calculated using the already known X-ray irradiation angle ⁇ or its actual value ⁇ ′ (step S41).
- the image processor 54 updates those function parameters written in the image memory 53 with the new values obtained this time (step S43). Thus, parameters necessary for 3D image reconstruction are calibrated.
- the image processor 54 calculates the calculated constant parameters Rd, Rs, B1 and function parameters ⁇ x / ⁇ Fi, ⁇ , ⁇ / ⁇ Fi, D, M, (CX, CY ) Is determined from the operation information of the operator (step S44). If such output is required, the image processor 54 prints or displays those values (step S45).
- Step S46 the process is passed to the controller 55 to determine whether the computer 57 should interactively image the patient with the operator.
- Step S46 When imaging is not necessary, a series of processing ends. This completes the structural analysis of the imaging space and the simple or detailed calibration.
- 3D reconstruction is performed in which the actual position of the dentition in the imaging space is accurately grasped.
- the projection is performed from the 3D reference tomographic plane SS along the oblique irradiation direction of the X-rays sandwiching the X-ray tube 31, and an imaging target (entity) such as a dentition is projected.
- an imaging target such as a dentition is projected.
- a three-dimensional position is identified with high accuracy.
- imaging including the process of position identification will be described.
- this process includes data collection by scanning, reconstruction of a reference plane panorama image as a pre-process, and creation of a three-dimensional autofocus image (three-dimensional surface image) as a main process and part 3 thereof. Display, measurement, and the like according to various aspects using a three-dimensional autofocus image are included.
- the controller 55 responds to an operator instruction given via the operating device 58 and instructs a scan for data collection (FIG. 30, step S51). ). Thereby, the rotation driving mechanism 30A, the moving mechanism 30B, and the high voltage generator 41 are instructed to be driven in accordance with a preset control sequence. For this reason, while rotating the pair of the X-ray tube 31 and the detector 32 around the jaw of the subject P, a pulsed or continuous wave X-ray is applied to the X-ray tube 31 during a predetermined period. Or continuously.
- the pair of the X-ray tube 31 and the detector 32 is rotationally driven based on a driving condition set in advance so as to focus the 3D reference tomographic plane SS calibrated as described above.
- the X-rays exposed from the X-ray tube 31 pass through the subject P and are detected by the detector 32. Therefore, as described above, digital amount of frame data (pixel data) reflecting the amount of X-ray transmission is output from the detector 32 at a rate of 300 fps, for example. This frame data is temporarily stored in the buffer memory 53.
- the processing instruction is passed to the image processor 54.
- the image processor 54 obtains the latest value of the irradiation angle, angular velocity, rotation center / reference tomographic plane distance D, and correction term M from the lookup table LUT for each frame number Fi in the X-ray irradiation direction of the 3D reference tomographic plane SS. Read out and correct the 3D reference tomographic plane SS. Thereby, the position of the tomographic plane SS is partially changed in the front-rear direction and smoothed (step S52A).
- the reference plane panoramic image PIst is reconstructed based on shift & add based on the tomosynthesis method corresponding to the spatial position of the corrected 3D reference tomographic plane SS, and each pixel value of the reconstructed image is stored ( Step S52B).
- the set of frame data used for this reconstruction is, for example, mapping characteristics indicating the relationship between the horizontal mapping position of the panoramic image shown in FIG. 31 and the set of frame data to be mutually added to create an image at that mapping position. It is requested from.
- the curve indicating the mapping characteristics includes both a curved portion having a steep slope according to the molar portion on both sides in the frame data direction (horizontal axis) and a curved portion having a gentler slope than that of the molar portion according to the front tooth portion. Consists of.
- a desired mapping position in the horizontal direction of the panoramic image is designated as shown in the figure.
- a set of frame data used for creating an image at the mapping position and its shift amount (the degree of superposition: that is, the inclination) are obtained. Therefore, these frame data (pixel values) are added to each other while being shifted by the designated shift amount, and vertical image data of the designated mapping position (range) is obtained.
- the mapping position and shifting and adding the entire panoramic image in the horizontal direction the reference plane panorama image PIst when focused on the 3D reference tomographic plane SS is reconstructed.
- the image processor 54 displays the reference plane panoramic image PIst on the monitor 60 (step S53).
- An example of this reference plane panoramic image PIst is schematically shown in FIG.
- the reference plane panoramic image PIst is a rectangular two-dimensional image because it is an image obtained by adding frame data to each other while shifting.
- the processing is performed by multiplying the coefficients so that the ratio of the vertical and horizontal enlargement ratios is the same at the center of the front tooth part. Has been improved to some extent.
- the aspect ratio of the teeth collapses as it proceeds to the molar part. That is, the teeth of the molar portion are drawn with a size smaller than the actual size.
- the X-ray tube 31 and the detector 32 are both rotated along the same circular orbit OB, so that the reconstructed reference panoramic image PIst is enlarged in the vertical direction.
- the distortion due to the rate change is large. That is, as illustrated in FIG. 33A, the enlargement factors K (K1, K2,..., Kn) at the horizontal positions of the reference panoramic image PIst are all different.
- the image processor 54 uses the value of the enlargement factor K for each rotation angle ⁇ that has already been obtained, so that the enlargement factor K becomes substantially the same value at each position in the horizontal direction of the image.
- 1 / K1, 1 / K2,..., 1 / Kn is multiplied by the pixel column of each column at each position in the horizontal direction (step S53A).
- the contour of the displayed reference panoramic image PIst itself changes from a rectangular one to a slightly wavy one.
- the shape is substantially the same at each position in the horizontal direction of the image.
- the pixel value of the reference panoramic image PIst in which the vertical distortion due to the difference in magnification is corrected is stored again in the image memory 53 and used for the subsequent display processing and 3D reconstruction processing.
- the magnification K may be corrected by using a value prepared in advance on the apparatus side.
- the image processor 54 determines whether or not an ROI (region of interest) is set in the reference plane panoramic image PIst by using the operation device 58 from the operator (step S54).
- the ROI set here is, for example, a rectangular partial region in which the image interpreter is particularly interested.
- the ROI is not necessarily rectangular. This ROI may be set for a panoramic image created by autofocus described later, and this processing will also be described later.
- step S54 determines whether the determination in step S54 is YES. If the determination in step S54 is YES, the image processor 54 sets the ROI for the reference plane panoramic image PIst based on the operation information of the operator (step S55). Next, a partial image of the partial area set by the ROI is cut out, and the partial image is enlarged and displayed, for example (step S56). For example, as shown in FIG. 34, this partial image is displayed so as to be superimposed on the original reference plane panoramic image PIst. Further, the one or more partial images may be displayed so as to fit in a so-called template in which blocks are arranged in a predetermined order so as to schematically represent the upper teeth and lower teeth.
- the image processor 54 determines whether or not to end the processing. This determination depends on whether or not there is predetermined operation information from the operator (step S57). If it is determined that the process has not yet ended (NO in step S57), the process returns to step S54 and the above-described process is repeated. On the other hand, when it is determined that the process has been completed, the process illustrated in FIG. 31 is terminated.
- step S54 determines whether or not the ROI is not set. If the determination in step S54 is NO, that is, if it is determined that the ROI is not set, the image processor 54 proceeds to the next determination. That is, it is determined from the operation information of the operator whether or not to create a 3D autofocus image as the main process (step S58). When it is determined that this creation is not performed (step S58, NO), the process returns to step S57 to determine whether or not the process is ended as described above.
- step S58 the process proceeds to a subroutine process in step S59.
- the processing executed in this step S59 constitutes one of the features of the present invention, taking into account the change in the position of the rotation center RC and always taking the X-ray focal point of the X-ray tube 31 from each pixel. This is an automatic identification process of the actual position and shape of the dentition, while correcting the distortion in the longitudinal direction of the dentition along the correct projection direction DRx.
- FIG. 35 shows a subroutine process for identifying the actual position / shape.
- the image processor 54 converts the reference plane panoramic image PIst (rectangular) into a curved surface parallel to the 3D reference tomographic plane SS (curved surface) to create a 3D panoramic image once. Then, the latest values of the irradiation angle ⁇ and the rotation center position coordinates (CX, CY) for each frame number Fi are read from the lookup table LUT, and the X-ray tube / rotation center distance R is read from the position coordinates (CX, CY). The direction is extended by S, and the position of the X-ray tube 31 is calculated for each X-ray irradiation angle ⁇ .
- an oblique projection direction DRx in which the X-ray focal point of the X-ray tube 31 is always held is determined from each pixel of the created 3D panoramic image.
- the frame data is obtained by calculating the tomographic plane on the 3D reference tomographic plane SS along each projection direction DRx, projected by converting the coordinates, and projected to the curved 3D reference tomographic plane SS. Is created (step S151).
- the pixel value of this projection image is stored in the image memory 53.
- the projection performed here is performed along an oblique projection direction DRx toward the position of the rotation center RC (RC1, RC2), that is, the position of the X-ray tube 31, as described in FIG.
- RC1, RC2 the position of the rotation center RC
- the pixel on the 3D reference tomographic plane SS is displayed. Projected to different positions SS1, SS2.
- 3D reference image PIref The projection image created by this projection processing will be referred to as 3D reference image PIref.
- This 3D reference image PIref is created for each part of the reference plane panoramic image PIst by oblique projection in consideration of the above-described vertical enlargement ratio.
- the enlargement rate of the teeth of the anterior teeth was corrected to the actual size by the above projection, while the enlargement rate of the teeth of the molar portion was small, Corrected to actual size rather than projection. Therefore, the 3D reference image PIref is an image displayed at the actual size of the tooth, and is an image from which distortion due to the magnitude of the enlargement ratio due to the movement of the rotation center RC during scanning is removed.
- the 3D reference image PIref is also an image when it is assumed that the dentition exists along the 3D reference tomographic plane SS. Since the actual tooth of the subject P is rarely along the 3D reference tomographic plane SS, further real position identification processing described later is required.
- the image processor 54 displays the 3D standard image PIref on the monitor 60 for reference by the operator (step S152). This is shown in FIG.
- the image processor 54 adds a plurality of curved tomographic planes parallel to the 3D reference tomographic plane SS (step S153). This is shown in FIG. In the drawing, a plurality of tomographic planes are added respectively before and after the projection direction DRx (dentation depth direction) of the 3D reference tomographic plane SS. Each of the plurality of tomographic planes is also a fault in which the position in the front-rear direction of the 3D reference tomographic plane SS is partially corrected by the amount corrected by the rotation center / reference tomographic plane distance D and the correction term M. Surface.
- a plurality of tomographic planes SFm to SF1 are set at a distance D1 (for example, 0.5 mm) on the front side of the 3D reference tomographic plane SS, and a plurality of tomographic planes SR1 to SRn are spaced at a distance D2 (for example, 0.5 mm) on the rear side.
- the intervals D1 and D2 may be the same or different from each other.
- the position data of the tomographic planes SFm to SF1 and SR1 to SRn to be virtually added is stored in advance in the ROM 61 together with the position data of the 3D reference tomographic plane SS, and is read out to the work area of the image processor 54. Thus, such addition is performed.
- the heights of the tomographic planes SFm to SF1, SS, SR1 to SRn are appropriately set in consideration of the maximum inclination in the projection direction DRx and the height of the dentition.
- the position (distance D1, D2) and the number of tomographic planes to be added may be interactively changed.
- the image processor 54 obtains the projection direction DRx corresponding to the change in the position coordinates (CX, CY) of the rotation center RC, and along the projection direction DRX, the reference plane panoramic image PIst.
- the image processor 54 obtains the projection direction DRx corresponding to the change in the position coordinates (CX, CY) of the rotation center RC, and along the projection direction DRX, the reference plane panoramic image PIst.
- the projection images created here are called 3D additional images PIsfms, PIsf1, PIsr1,..., PIsrn. These 3D additional images PIsfm,..., PIsf1, PIsr1,.
- the 3D additional image PIsfm Projected at different positions on each of PIsf1, PIsr1, ..., PIsrn.
- these 3D additional images PIsfm, ..., PIsf1, PIsr1, ..., PIsrn are also images displayed at the actual size of the teeth, and distortion due to the magnitude of the magnification due to movement of the rotation center RC during scanning is removed. It is an image that was made.
- these 3D additional images PIsfm,..., PIsf1, PIsr1,..., PIsrn are also images when it is assumed that the dentitions exist along the respective additional tomographic planes SFm to SF1 and SR1 to SRn.
- the created 3D additional images PIsfm,..., PIsf1, PIsr1,..., PIsrn are displayed on the monitor 60 as they are as a three-dimensional image or as a rectangular two-dimensional image after coordinate conversion. It may be.
- a line segment Lc having a certain length centered on the designated position P (x, y, z) is designated in the 3D reference image PIref (step S156: see FIG. 40B).
- the line segment Lc may be curved along a part of the curved 3D reference tomographic plane SS, or may be set within a range that can be regarded as a straight line.
- the image processor 54 virtually adds a plurality of line segments Ladd of the same length above and below the image of the specified line segment Lc (x, y, z) (step S157: FIG. )reference).
- the pixel values P ij of the 2 n pixels constituting each of the above-described line segment L and the plurality of line segments Ladd are read from the image memory 53 and assigned to each line segment (step S158).
- This pixel value P ij is a value that has already been acquired and stored in steps S151 and S154 described above.
- Step S159 see FIG. 40D.
- the image processor 54 in each of the added 3D additional images PIsf1,..., RefPIsf1, PIsr1,..., PIsrn, the line segment Lc (x, y, z) currently designated on the 3D reference image PIref described above. Identifies the positions of the line segments Lfm to Lf1 and Lr1 to Lrn facing each other in the projection direction DRx passing through the currently designated position P (x, y, z) (step S160: see FIG. 40E).
- step S160 for specifying the position P (x, y, z) on the 3D reference image PIref is repeated until all the positions are specified. Therefore, in effect, the X-rays irradiated from the X-ray tube 31 whose position is near the virtual tomographic planes SFm to SF1, SS, SR1 to SRn are in the range H1 to H2 (range in the Z-axis direction). It is transmitted in a fan shape (FIG. 40F). For this reason, the tomographic planes SFm to SF1, SS, SR1 to SRn themselves may be set as substantially horseshoe-shaped cross sections whose height changes for each scanning direction and is parallel to each other.
- the image processor 54 reads out the pixel values P ij * of these line segments from the image memory 53 (step S161).
- the X-ray irradiation range RA has a fan shape (when viewed from the Z-axis direction). For this reason, the number of pixels of each of the line segments Lfm to Lf1 and Lr1 to Lrn is deviated from 2n .
- the image processor 54 the additional line segments Lfm ⁇ Lf1, Lr1 number of pixels ⁇ Lrn is the reference line Lc (x, y, z) to be the same as the number of pixels the 2 n, the line segment Each of Lfm to Lf1 and Lr1 to Lrn is multiplied by a coefficient corresponding to the intervals D1 and D2 (step S162). Therefore, as schematically shown in FIG. 40G, all line segments Lfm to Lf1, Lc, and Lr1 to Lrn are composed of 2n pixels that are parallel to each other.
- the image processor 54 performs frequency analysis on changes in the values of all the prepared line segments Lf1 to Lfm, Lc, and Lr1 to Lrn (step S163).
- analysis results are obtained with the horizontal axis representing the frequency and the vertical axis representing the Fourier coefficient (amplitude value).
- FFT fast Fourier transform
- an equivalent process may be performed using a Sobel filter that performs a first-order differential operation for rendering an edge. When this filter is used, the position of the tomographic plane having the maximum edge can be regarded as the optimum focus position.
- FIG. 41 illustrates frequency analysis characteristics for one line segment.
- the coefficient of the frequency component in the region of the certain range of the analyzed highest frequency is excluded, and the coefficient of the remaining high frequency component is adopted. This is because the frequency component in a certain range on the highest frequency side is a noise component.
- P (x, y, z) P
- a plurality of tomographic planes SFm to SF1, SS, SR1 to SRn passing through (0,0,0) in the projection direction DRx are calculated as profiles with the horizontal axis (step S165).
- An example of this profile is shown in FIG.
- the cross-sectional position is a position in the projection direction DRx (depth direction of the dentition) of the plurality of tomographic planes SF1 to SFm, SS, FR1 to FRn.
- FIG. 43 illustrates typical patterns of a plurality of types of profiles PR1, PR2, PR3, and PR4 when the material is enamel, cancellous bone, air, and bite block.
- an enamel substance that is, a tooth exists at any position in the projection direction DRx passing through the currently designated position P (x, y, z)
- the profile PR1 has a sharp peak.
- the profile PR2 is a gentle convex curve.
- the profile PR3 is a curve indicating a tendency not to have a specific peak.
- the profile PR4 has two sharp peaks.
- the peak corresponding to the inner side (X-ray tube side) of the projection direction DRx indicates the peak for the enamel substance
- the peak corresponding to the outer side (detector side) indicates the peak for the bite block.
- Data indicating the patterns PR1 to PR4 shown in FIG. 43 is stored in advance as a reference profile, for example, in the ROM 61 as a reference table.
- the image processor 54 specifies the position of the optimum focus with respect to the tooth in the projection direction DRx passing through the currently designated position P (x, y, z) using the reference table (step S166).
- the obtained profiles are the reference profiles PR2 and PR4, they are excluded from processing.
- the cross-sectional position exhibiting the peak that is, any one of the plurality of tomographic planes SF1 to SFm, SS, FR1 to FRn is the optimum focus. Identify as being.
- a cross-sectional position (enamel position) having a peak on the inner side (X-ray tube side), that is, a plurality of tomographic planes SFm to SF1, SS, FR1 to Any position of FRn is specified as the optimum focus.
- These position identification processes determine which position in the depth direction the tooth portion at the currently designated position P (x, y, z) is actually located. That is, the tooth portion depicted in the 3D reference image PIref along the 3D reference tomographic plane SS may actually be on the front side or the rear side of the tomographic plane SS. This actual position is accurately determined by the above-described specifying process. In other words, it can be said that the tooth portion of the 3D reference image PIref drawn on the assumption that it is on the 3D reference tomographic plane SS is shifted to the actual position by the above-described specific processing.
- the position P1 in the 3D reference tomographic plane SS (3D reference image PIref) is P1real (or P2 is P2real).
- the positions of line segments Lfm to Lf1 and Lr1 to Lrn set on the plurality of additional tomographic planes SFm to SF1, FR1 to FRn are set in consideration of the oblique angle ⁇ in the projection direction DRx. Therefore, the shifted position P1real is larger when the oblique angle ⁇ is small (see FIG. 45B and FIG. 46B) than when the oblique angle ⁇ is small (see FIG. 45A).
- the shift position P1real is compensated for the distortion due to the oblique X-ray irradiation angle ⁇ , that is, the magnification ratio.
- ⁇ magnification ratio
- step S165 the image processor 54 stores the identified data indicating the actual tooth position in the work area for each position P (x, y, z).
- the position P (x, y, z) currently specified in the 3D reference image PIref that is, the 3D reference tomographic plane SS
- the focus position is identified.
- the image processor 54 determines whether or not the above-described specific processing has been completed for all the determination positions P set in advance on the 3D reference image PIref as shown in FIG. 48 (step S167). This determination is made by determining whether or not the currently processed position P (x, y, z) is the final position P (p, q, r). If this determination is NO and the specific processing has not been completed for all the determination positions P, the image processor 54 shifts the determination position P (x, y, z) by one (step S168), The process returns to step S155 described above, and the above-described series of specific processes is repeated.
- the plurality of determination positions P are preliminarily arranged two-dimensionally at a predetermined interval along the 3D reference image PIref (that is, the 3D reference tomographic plane SS).
- the 3D reference image PIref is arranged along the vertical axis direction i and the horizontal axis direction j with the same predetermined distance d in the vertical and horizontal directions.
- the predetermined distance d may be different from each other in the vertical axis direction i and the horizontal axis direction j.
- the shift direction in the process of step S168 may be any of vertical, horizontal, and diagonal directions along the 3D reference image PIref. As shown in FIG.
- shifting in the horizontal axis direction j and shifting along the vertical axis direction i may be repeated regularly (See symbol SC in the figure). Conversely, shifting in the horizontal axis direction j and then shifting in the vertical axis direction i may be repeated. Further, it may be shifted in an oblique direction.
- step S167 described above becomes YES in the above-described repeated determination. That is, the process of detecting the cross-sectional position of the optimal focus (including the determination of the presence or absence of the optimal focus position) is completed for each determination position P in the depth direction of the 3D reference tomographic plane SS. In this case, the process shifts to the process of combining the cross-sectional positions of the optimum focus.
- step S169 the image processor 54 reads data representing the cross-sectional position of the optimum focus specified and stored in step S165 (step S169).
- the data of the cross-sectional position is a position in the projection direction DRx that passes through each determination position P (x, y, z). This is schematically shown in FIG. In the figure, black circles indicate the determination position P (x, y, z) of the 3D reference image PIref (3D reference tomographic plane SS).
- the vertical direction and the horizontal direction of the curved 3D reference image PIref are represented as (i, j).
- Become. 49 shows step S168 at one position in the Z-axis direction (vertical direction) for easy viewing of the drawing, the process of step S168 is also executed for each of the other positions in the Z-axis direction.
- the image processor 54 removes noise (step S170).
- the data of the positions of adjacent cross sections are smoothed so as to be smoothly connected, and replaced with the smoothed new position data, or data close to the outside of the detector is given priority, etc. Perform the process.
- the abnormal data may be simply excluded from the processing target without performing such compensation by replacement.
- the image processor 54 combines the noise-removed positions (namely, enamel positions), and smoothes the data of the combined positions three-dimensionally to obtain a surface image obtained by tracing the shape of the enamel portion. Create (step S171). Further, the image processor 54 displays the surface image on the monitor 60 at a predetermined view angle as a three-dimensional panoramic image in which all the parts are automatically subjected to the optimum focus processing, that is, the 3D autofocus image PIfocus ( Step S172).
- a 3D autofocus image PIfocus that can be formed along the contour where the structure of the dentition of the oral cavity of the subject P can be seen most clearly when viewed at a predetermined view angle.
- a curved horseshoe-shaped range S is a range for displaying a 3D autofocus image PIfocus
- a solid line portion represents an actual position and shape of the dentition.
- the gums (alveolar bone) part mandibular sinus, temporomandibular joint, carotid artery, etc.
- the 3D autofocus image PIfocus is curved along the dentition, but its surface is bumpy, and this “bumpy” gives the actual position and shape (contour) of each tooth to the pixel It is expressed by shading.
- Other parts can also be expressed as images with no sense of incongruity.
- the image processor 54 gives the operator an opportunity to observe the 3D autofocus image PIfocus in another manner. That is, the image processor 54 determines whether or not to interactively display the 3D autofocus image PIfocus in another manner based on operation information from the operator.
- the image processor 54 determines whether or not to observe a partial region of the 3D autofocus image (3D panoramic image) PIfocus (FIG. 31, step S60). If the determination in step S60 is YES, then whether or not the partial area is to be observed on the 3D reference tomographic plane SS or on the rectangular plane (two-dimensional) of the reference plane panoramic image, information from the operator is obtained. Based on the determination (step S61). If it is determined in step S61 that the 3D reference tomographic plane SS is to be used, the image processor 54 re-projects the 3D autofocus image PIfocus onto the 3D reference tomographic plane SS along the projection direction DRx passing through the individual pixels ( Step S62). This reprojection is shown in FIG. This re-projection is executed by a sub-pixel method in which one pixel of a 3D reference tomographic plane is separated from a corresponding three-dimensional pixel by a sub-pixel and re-projected.
- the reprojected image on the 3D standard tomographic plane SS is displayed on the monitor 60 as a 3D reference image PI proj-3D (step S63).
- An example of the 3D reference image PI proj-3D is shown in FIG.
- step S61 if it is determined in step S61 that the rectangular plane of the reference plane panoramic image PIst is used, the image processor 54 re-projects the 3D autofocus image PIfocus onto the rectangular plane, that is, the plane of the reference plane panoramic image (step S64). .
- this re-projection is also performed by a so-called sub-pixel method in which one pixel of a standard panoramic image plane is re-projected by dividing a corresponding three-dimensional pixel by a sub-pixel.
- the concept of this reprojection is shown in FIG.
- This reprojection image is displayed on the monitor 60 as a 2D reference image PI proj-2D (step S65).
- An example of the 2D reference image PI proj-2D is shown in FIG.
- the operator sets a desired, for example, rectangular ROI (region of interest) in the 3D reference image PI proj-3D or 2D reference image PI proj-2D (step S66: see FIGS. 52 and 54).
- the image of the partial area designated by this ROI is enlarged, for example, and is superimposed and displayed on, for example, the currently displayed 3D reference image PI proj-3D or 2D reference image PI proj-2D (step S67).
- this display may be a single image separate from the panoramic image, may be a divided display with the panoramic image, or may be one of templates composed of a plurality of blocks simulating a dentition.
- the stored display may be used.
- the image processor 64 determines whether or not to end the series of processes from the operation information (step S68). If this determination is YES, the process returns to step S57 described above. On the other hand, if NO, the process returns to step S60 and the above-described process is repeated.
- step S60 the image processor 54 displays the currently displayed 3D autofocus image PIfocus by rotating, moving, and / or enlarging / reducing it. Whether or not interactively is determined (step S59). If this determination is YES, the 3D autofocus image PIfocus is rotated, moved, and / or enlarged / reduced according to the command information, and the image is displayed (steps S70 and S71). Thereafter, the process proceeds to step S68, and the same process as described above is repeated.
- display modes are not limited to those described above, and various other modes such as colorization can be adopted.
- the image processor 64 ends the process through steps S68 and S57.
- step S66 you may make it transfer to the process of step S69, without performing the display process of step S67.
- the set ROI is displayed in step S71 together with the rotated, moved, enlarged / reduced image.
- the projection direction can be expressed three-dimensionally by grasping the structure of the panoramic imaging space three-dimensionally. Therefore, as long as the panoramic image is in focus, the three-dimensionally expressed image is not distorted and an accurate panoramic image can be constructed. As a result, the panoramic image can be displayed more stably regardless of whether the positioning is good or not, and a clear image can be created with the entire panoramic image.
- the scan of the X-ray extraoral imaging apparatus 1 is executed as described above. Therefore, the X-ray tube 21 and the detector 22 can scan the dentition TR with the X-ray beam XB while moving along the trajectory OB approaching the subject.
- the distance between the center portion of the front tooth portion of the dentition TR and the detector 22 is close to 54 mm as an example.
- the distance between the X-ray tube 21 and the detector 22 is 300 mm even for the path of the X-ray beam XB passing through the geometric center O of the orbit OB, The length is smaller than that. For this reason, even if the tube current of the X-ray tube 21 is set to a value of about 500 ⁇ A, sufficient imaging can be performed.
- This tube current is 1/10 or less of the conventional value. For this reason, the amount of X-ray exposure given to the subject P is significantly reduced.
- the radiation management area is limited to the inside of the imaging space formed by the scanning device 10. In other words, since the outside of the scanning device 10, specifically, the orbital body 12 is out of the definition of the radiation management area, the dentist can take an image while standing by the scanning device 10. In other words, the radiation control area is narrower.
- the radiation control area can be formed in a space-saving and compact manner by stopping it within a very narrow range inside the scanning apparatus 10.
- a panoramic image of the dentition can be taken during treatment with the patient sitting on the treatment chair. For this reason, it is very convenient for the dentist.
- a panoramic image having a high resolution equivalent to or higher than that of a conventional X-ray intraoral imaging apparatus is provided by the above-described processing for detecting the actual position and shape of the object in a three-dimensional manner with higher accuracy. be able to.
- the scanning apparatus 10 can be covered with an X-ray shield plate during imaging, but this is not essential.
- the radiation control area is confined to a narrow space called a scanning device to save space, and a panoramic image of the dentition is taken during treatment with the patient sitting in the treatment chair (laying down). Can do. Therefore, it is possible to provide a high-resolution three-dimensional panoramic image that is easy to use and can be replaced by an X-ray intraoral imaging apparatus.
- the X-ray extraoral imaging apparatus 1 described above can be installed in various modes.
- the scanning device 10 is fixedly or detachably attached to the backrest of the treatment chair via the arm 201, and the patient sits on the treatment chair and is suspended from above. You may make it receive wearing.
- the scanning apparatus 10 is also supported by a shoulder pad 202 placed on the patient's P shoulder. Thereby, positioning of the jaw part of the patient P becomes easier.
- the arm 201 is attached to a pole 202 with casters, and the computer 11, the touch panel type monitor 60, and the operating device 61 are attached to the pole 202.
- imaging may be performed in a state where the scanning device 10 itself is installed alone on the shoulder or head of the patient via a shoulder pad or head pad.
- the scanning device 10 can be fixedly or detachably attached to the headrest portion of the dental treatment chair.
- the scanning device 10 is attached to the tip of the arm device 204 as a separate body, and around the head of the patient P sitting on the treatment chair during imaging.
- the scanning device 10 can be configured to be positionable. An example of this is shown in FIG.
- the scanning apparatus 10 that creates the circular orbit OB using the circular ring body 21 is illustrated, but the shape of the member that provides the orbit OB does not necessarily need to be circular. For example, it may be elliptical or may have various shapes having a part of a curve. Furthermore, in consideration of the scanning angle range, a part of the ring body 21 may not be connected but may be opened. A cord necessary for power supply and control can be connected to an internal circuit from such an opening.
- a smooth weight coefficient may be multiplied along each pixel row in the horizontal direction of the reference panoramic image PIst.
- various parameters such as the magnification ratio necessary for the structural analysis of the imaging space and the 3D image reconstruction can be calibrated using the phantom according to the present embodiment.
- a design value designed in advance as a necessary parameter may be simply used as it is without using a phantom.
- the radiation imaging apparatus is not limited to the one implemented in the dental X-ray extraoral imaging apparatus, and three-dimensionally determines the actual shape (position) of the object using the tomosynthesis method. It can also be implemented as a device for grasping.
- the X-ray tomographic imaging apparatus has a configuration for tomographic imaging (panoramic imaging) based on the tomosynthesis method, and according to a request from the operator while maintaining the configuration.
- the X-ray tomographic imaging apparatus 300 includes a scanning apparatus 301 and a main body cabinet 302.
- the scanning device 301 includes first and second two arms 311 and 312 that can rotate independently of each other.
- An X-ray tube unit 31U and a detector unit 32U are respectively attached to the distal ends of the first and second arms 311 and 312 so as to intersect the arms.
- the first and second arms 311, 312, the X-ray tube unit 31U, and the detector unit 32U have two L-shaped arm portions as shown in the drawing around the central axis CA passing through the rotation center O. It can be rotated.
- a space formed between the two arm portions by this rotation is provided as an imaging space IS.
- this imaging space IS the jaw of the subject P (patient) who is sleeping on a bed or a dental chair is positioned.
- the direction of the central axis CA is the Z-axis of the orthogonal coordinate system, and the head of the subject P is positioned along this Z-axis, so this Z-axis is called the body axis direction.
- Both the X-ray tube unit 31U and the detector unit 32U face each other directly or diagonally with the jaw of the subject P in between.
- the X-ray tube unit 31U is provided with the X-ray tube 31 and the collimator 33.
- the detector unit 32U is provided with an X-ray detector 32A as in the first embodiment.
- each of the first and second arms 311 and 312 is rotatably supported by the same support portion 320, and both can rotate around the central axis CA.
- the support 320 is attached to a main body cabinet 302 with casters.
- the main body cabinet 302 includes the computer 11 and the high voltage generator 12 described above, and a monitor 60 and an operation device 61 outside the computer cabinet 302 for interactive dialogue with the operator.
- the X-ray tube unit 31U includes an X-ray tube 31 and a collimator 33
- the detector unit 32U includes a detector 32A.
- the irradiation field of the X-rays emitted from the X-ray tube 31 is reduced by the collimator 33 and passes through the jaw of the subject P.
- This transmitted X-ray is detected by the detector 32A.
- the X-ray tube 31 and the detector 32A are paired and rotate around the jaw of the subject P (however, the X-ray tube 31 and the detector 32A).
- the rotation of the jaws is controlled independently of each other) and the jaws can be scanned by X-rays. That is, panorama mode and CT mode imaging can be performed by the same scanning device 301.
- the panoramic imaging mode and the CT imaging mode are the same by the scanning device 301 and each of the geometry (from the rotation center O to the X-ray tube 31 (X-ray tube focal point) and the detector 32A (detection element thereof).
- the distance from the rotation center O to the X-ray tube 31 is made slightly longer. That is, the distance r1 from the rotation center O to the detector 32A is, for example, 15 cm, but the distance r2 from the rotation center O to the X-ray tube 31 (the X-ray tube focal point) is, for example, 21.5 cm.
- the detector 32A rotates around the rotation center O along the first circular orbit OB1, and the second diameter is larger than the first circular orbit OB1.
- the X-ray tube 31 rotates along the circular orbit OB2.
- having two circular orbits OB1 and OB2 is different from the first embodiment in which both the X-ray tube 31 and the detector 32 rotate on the same circular orbit OB.
- the configuration of the scanning apparatus using the circular orbits OB1 and OB2 having two different diameters can also be applied to the X-ray mouth imaging apparatus described in the first embodiment.
- the irradiation field is controlled by the collimator 33, the posture of the detector 32A is changed, and the subject P of the X-ray tube 31 and the detector 32A is changed.
- the movement in the body axis direction Z and the position change with respect to the subject jaw of the scanning device 301 itself are performed.
- the tube voltage for the X-ray tube 31 is set to 70 kV
- the tube current is set to 900 ⁇ A to 1.3 mA, for example
- the radiation management area is limited to the inside of the imaging space IS formed by the scanning device 301 as in the first embodiment. It has come to be.
- the detector 32A will be described. Similarly to the first embodiment, the detector 32A is configured as a semiconductor detector that directly converts X-rays into digital electricity.
- this semiconductor detector is modularized, and a plurality (17 ⁇ 4) of modules MJ are arranged in a two-dimensional manner, so that a vertically long shape is obtained as shown in FIGS.
- a rectangular effective field of view (an effective region where X-rays are incident) is provided.
- the plurality of modules MJ are housed in a box-shaped case 32b.
- the opening control of the collimator 33 and the mask processing of the module MJ are executed for each detector mode on the detector 32A.
- a thin slit effective field Fpano is set by the mask processing and the aperture stop of the collimator 33 as shown in FIG.
- an effective visual field Fpano-s in which the size of the vertical direction LAT is further shortened can be set by the collimator 33.
- This short effective visual field Fpano-s is applied when mainly photographing the upper and lower dentitions of the jaw.
- the detector 32A is used by being tilted (rotated) by about 90 ° to the side as compared with the panoramic imaging mode. That is, it is used as a horizontally long detector 32A.
- two types of effective visual fields Fct-f and Fct-p having a slit shape, for example, are set by the mask processing and the aperture stop of the collimator 33.
- One effective field of view Fct-f is suitable for CT imaging of the entire dentition of the jaw, 14.2 cm in the horizontal direction (vertical direction LON in FIG. 62), and in the vertical direction (horizontal direction LAT in the same figure). It has a size of 3.2 cm.
- the other effective visual field Fct-p is suitable for CT imaging of a part of the dentition (for example, the front tooth part, the left molar part, or the right molar part), and is 7.1 cm in the lateral direction (longitudinal LON). It has a size of 3.2 cm in the longitudinal direction (lateral direction LAT).
- the angle at which the detector 32A is tilted (rotated) in the CT imaging mode is not necessarily 90 ° or almost 90 °.
- the detector may be tilted so as to cross obliquely with respect to the longitudinal direction of the detector.
- it is only necessary to ensure a visual field (pixel region) having a certain width or more in the body axis direction.
- This detector 32A is used for both panoramic imaging mode and CT imaging mode. For this reason, when shifting from the panoramic imaging mode to the CT imaging mode, it is necessary to rotate the detector 32A by about 90 °. This is shown in FIG. For this reason, the case 32b of the detector 32A is provided with a rotation shaft 32c on the opposite side of the X-ray incident surface, and can be rotated manually around the rotation shaft 32b or automatically in response to a mode change instruction. ing. The rotation shaft 32c is located at the center in the longitudinal direction of the detector 32A.
- the position of the rotation center O and the position of the dentition TR are shifted in the body axis direction Z by simply rotating the detector 32A by about 90 °. Therefore, when shifting to CT imaging, the position of the pair of the X-ray tube 31 and the detector 32A in the body axis direction Z is raised by a predetermined distance H1 (for example, 5 cm), that is, shifted to the head side by a predetermined distance H1. Thereby, the height in the body axis direction Z of the tooth row TH and the rotation center O substantially coincides.
- a predetermined distance H1 for example, 5 cm
- the detector 32A is then tilted (rotated) by about 90 ° around the rotation axis 32c of the detector 32A to reverse the vertical / horizontal relationship. Thereafter, only the detector 32A is lowered by a predetermined distance H2 (for example, 4.3 cm) in the body axis direction Z, that is, shifted by a predetermined distance H2 in a direction away from the head. Thereby, the initial position of the detector 32A in the scanning apparatus 301 with respect to CT imaging is determined.
- a predetermined distance H2 for example, 4.3 cm
- an anterior tooth imaging mode, a left molar imaging mode, and a right molar imaging mode are prepared as CT imaging of a partial dentition.
- the scanning device 301 itself is moved to the head side in the body axis direction Z by a predetermined distance H3 (for example, 3 cm).
- the scanning device 301 itself is translated by a predetermined distance H4 (for example, 3 cm) to the left as viewed from the subject P.
- the scanning apparatus 301 itself is translated by a predetermined distance H4 (for example, 3 cm) to the right when viewed from the subject P.
- the position of the rotation center O also moves in parallel by a predetermined distance H4 on the left side or the right side while being on the same plane. By this movement, the position of the left molar portion or the right molar portion is closer to the rotation center O.
- the movement of the scanning device 301 may literally be a configuration in which the scanning device 301 supported by the main body cabinet 302 is moved, or the first portion supported by the support unit 320 of the scanning device 301. In addition, only the second arms 311 and 312 may be moved.
- the mechanism M1 that can move the support part 320 in the vertical direction and the horizontal and vertical directions in the horizontal plane, and the first and second arms 311 and 312 in the support part 320 are arranged with respect to the central axis CA.
- a mechanism M2 that can rotate independently of each other is included.
- the rotational movement mechanism is located inside the first arm 311 and can move the X-ray tube unit 31U in the direction of the central axis CA and rotate around an axis parallel to the central axis CA.
- These mechanisms M1 to M4 are driven under the control of the controller 55 via a driver (not shown).
- This processing shifts from the panoramic imaging state to CT imaging in response to the operator's request.
- This X-ray tomographic imaging apparatus 300 has a panoramic imaging function while having both panoramic imaging and CT imaging functions, and adopts a design philosophy of additionally providing a CT imaging function thereto. . For this reason, it is appropriate to describe the process related to the transition from panoramic imaging to CT imaging. However, both functions of panoramic imaging and CT imaging may be provided on an equal basis, and one of the two imaging modes may be selected when the user activates the X-ray tomography apparatus 300. Note that when returning from the CT imaging mode to the panoramic imaging mode, the X-ray tube 31 and the detector 32A may return to the initial panoramic imaging position by a procedure reverse to the procedure described with reference to FIG. .
- step S201 the controller 55 determines whether or not the CT imaging mode is instructed based on instruction information from the operator via the operation device 61. If this determination is YES, either the entire dentition CT imaging mode or the partial dentition CT imaging mode has been instructed, so the common processing of steps S202 to S204 is executed first.
- the controller 55 moves the pair of the X-ray tube 31 and the detector 32A in the head direction by a predetermined distance H1 (for example, 5 cm) along the body axis direction Z (step S202).
- the controller 55 rotates the detector 32A by 90 degrees to turn it sideways (step S203).
- the detector 32A is lowered in the body axis direction Z by a predetermined distance H2 (for example, 4.3 cm) along the body axis direction Z (step S204).
- H1 for example, 5 cm
- H2 for example, 4.3 cm
- step S205 the controller 55 determines whether or not the CT imaging mode is the dentition entire region CT imaging mode based on operation information from the operator.
- this determination is YES, that is, in the dentition entire region CT imaging mode
- step S206 the opening of the collimator 33 is adjusted so that the X-ray irradiation field becomes the effective field of view Fct-f of the X-ray incident surface of the detector 32A.
- the controller 55 finally finely adjusts the position of the scanning device 301 in the body axis direction Z based on the operation information from the operator to determine the photographing position. This adjustment may be performed manually or automatically.
- step S208 the tube voltage and tube current for CT imaging given to the X-ray tube 31 are set, and the process proceeds to step S209.
- scanning is commanded and data is collected.
- the processing in step S209 will be described in detail later.
- step S205 determines whether the front tooth CT imaging mode is commanded (step S210), the right molar CT imaging mode is commanded (YES in step S211), or It is then determined whether the left molar CT imaging mode is commanded (NO in step S211).
- the scanning device 301 is moved to the head side in the body axis direction Z by a predetermined distance H3 (for example, 3 cm) in step S212.
- H3 for example, 3 cm
- the process proceeds to step S213, and the scanning device 301 itself is translated by a predetermined distance H4 (for example, 3 cm) to the right when viewed from the subject P.
- the scanning device 301 is translated by a predetermined distance H4 (for example, 3 cm) to the left as viewed from the subject P.
- step S215 adjusts the opening of the collimator 33, and the X-ray irradiation field becomes the X of the detector 32A. It is made to correspond to the partial effective visual field Fct-p virtually set to the line incident surface. Thereafter, the above-described steps S208 and S209 are executed.
- an operation equivalent to that performed in steps S202, S203, S204, S212, S213, and S214 may be configured to be performed manually by the operator.
- the above-described distances H1, H2, H3, and H4 are fine adjustment amounts based on the physique of the subject, particularly the statistical size of the forehead (including the dentition). These amounts can be increased or decreased in view of the physique.
- step S251 the controller 55 positions the pair of the X-ray tube 31 and the detector 32A so as to face each other at the initial position.
- the first and second arms 311 and 312 are moved clockwise (or counterclockwise) about the central axis CA through, for example, steps S252 and S253, for example, a predetermined angle range ⁇ ct (+ 210 ° or ⁇ 210 °).
- the frame data of the transmission X-rays detected by the detector 32A is collected every predetermined period, and the frame data is temporarily stored in the buffer memory 52.
- step S255 the pair of the X-ray tube 31 and the detector 32A, that is, the first and second arms 311 and 312 are moved to the chest side by a predetermined distance H5 (for example, 19 mm) in the body axis direction Z.
- H5 for example, 19 mm
- the first and second arms 311 and 312 are moved clockwise (or counterclockwise) about the central axis CA from the end point position to the initial position by a predetermined angle range ⁇ ct ( ( ⁇ 210 ° or + 210 °), and during this rotation, the frame data of the transmitted X-rays detected by the detector 32A are collected every predetermined period, and this frame data is temporarily stored in the buffer memory 52.
- a predetermined area B1 for example, 85 mm ⁇ ⁇ 38 mm covering the entire dentition around the rotation center O. (Height) can be secured.
- a predetermined area B2 for example, a height of 45 mm ⁇ ⁇ 38 mm that covers at least the anterior tooth portion, the right molar portion, or the left molar portion. 3) can be secured.
- the image processor 54 reconstructs the three-dimensional CT data by applying a desired algorithm to the collected data. be able to.
- An appropriate cross-section conversion process is performed on the three-dimensional reconstruction data, and for example, a cross-section along the entire dentition or a tomographic image along a partial cross-section of the dentition can be cut out.
- the X-ray extraoral imaging apparatus can perform panoramic imaging, but can easily perform X-ray CT imaging with the same apparatus. Since it is not necessary to replace the scanning device, it is easy to use and highly versatile. Of course, the above-described operational effects of the first embodiment can also be enjoyed.
- the X-ray tomography apparatus may be applied to a CT apparatus that performs mammography.
- the breast part of a patient lying on the bed is suspended from a hole in the bed, and the breast part is sandwiched with a weaker pressing force than a breast press plate with low X-ray absorption used in normal mammography.
- the movement in the body axis direction and the rotation (return path) within a predetermined angle range are executed.
- X-ray transmission data for breast tomosynthesis or X-ray CT tomography can be collected, and a tomographic image for mammography can be generated.
- the breast is positioned instead of the head, and the breast is sandwiched with a weaker pressing force than a breast press plate with low X-ray absorption used in normal mammography. Then, the breast is scanned in the same manner as described above. Thereby, mammography similar to the above can be performed.
- the detectors are not arranged in a single row, but in multiple rows, for example, three rows discretely or by using a part of the flat detector, the projection angle of collection by tomosynthesis becomes a wide angle. Thereby, the sharpness is further improved as a tomographic image, and an image with less X-ray exposure of the patient can be obtained.
- the number of detectors provided in the X-ray tomography apparatus according to the present invention is not necessarily limited to one.
- a plurality of detectors or a flat detector equivalent thereto is also included in the concept of the detector according to the present invention.
- the distance between the detector field of view on the breast side and the end face of the detector is reduced to a level of several millimeters, and the examination area is secured to the end face by the tomosynthesis method and X-ray CT. Both tomographic methods are important.
- the X-ray tomography apparatus can be applied to, for example, a dental panoramic imaging apparatus.
- a dental panoramic imaging apparatus it is possible to reduce the size by stopping the radiation control area on the scanning device that is the scanner part, and in a state where the patient is seated (laid down) in the treatment chair, a panoramic image of the dentition is displayed during the treatment.
- this X-ray tomographic imaging apparatus can perform X-ray CT imaging in addition to panoramic imaging, and is therefore highly versatile in the medical field.
- this X-ray tomography apparatus is applicable not only to dentistry but also to medical devices other than dentistry and non-destructive inspection devices, and can exhibit the same applicability as described above.
- X-ray mouth imaging device (X-ray tomography device) DESCRIPTION OF SYMBOLS 10,301 Scan apparatus 11 Computer 21 Ring body 31 X-ray tube 31U X-ray tube unit 32, 32A Detector 32U Detector unit 33 Collimator 54 Image processor 55 Controller (CPU) 300 X-ray tomography apparatus 302 Main body cabinet 311 First arm 312 Second arm 320 Supporting part P Subject OB, OB1, OB2 Orbit TR Dental row IS Imaging space O Center of rotation CA Center axis
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Physics & Mathematics (AREA)
- Surgery (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- High Energy & Nuclear Physics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Algebra (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Mathematical Physics (AREA)
- Pure & Applied Mathematics (AREA)
- Human Computer Interaction (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Pulmonology (AREA)
Abstract
Description
図1~54を参照して、本発明に係るX線断層像撮影装置としての歯科用X線口外撮影装置の第1の実施形態を説明する。
この実施形態では、最初に、本実施形態に係るX線口外撮影装置の基本構成を説明する。その後で、このX線口外撮影装置の設置の様々な具体例を変形例として説明する。
撮影時には、リング体21の内側の撮像空間ISに被検体Pの顎部が位置付けられる。したがって、X線管31から曝射されたX線はコリメータ33によりコリメートされX線ビームXBとなって被検体Pに向かって照射される。このX線ビームXBは被検体Pの顎部を透過して検出器32の検出面に入射し、検出面に並んだX線検出素子によりデジタル量の電気信号に画素毎に直接変換される。この結果、前述したように検出器22からフレームデータが高速なフレームレートで出力される。
歯科用のパノラマ撮像装置においても、他の医療用のモダリティと同様に、高分解能な画像の提供とともに、省電力化や小形・軽量化が求められている。
また、X線管電流Iを少なくするだけでは、画像の分解能が下がるので、使用に耐えられる高精細な断層像を生成することはできない。このため、本実施形態では、X線管焦点を0.25mm以下の小さい値に設定すること、検出器32として直接変換型のデジタル型検出器を用いて高速にフレームデータを収集することも必要である。
その一方で、このX線口外撮影装置1は、被検体の顎部の馬蹄形を成す歯列に沿った断層面の画像をトモシンセス法で再構成する。図3に示すように、歯列TRの位置はスキャン装置10のXY面における幾何学的中心Oには位置せず、顎部の前側に寄っている。加えて、歯列TRの後方にはスキャン時の障害物としての頸椎CSが位置する。歯列TRそのものをとっても歯と歯の重なりがある。このため、その重なりが極力写り込まないように、かつ、極力、頸椎CSを避けて歯列を通過するようにX線ビームXBのパスがX線照射角度θ毎に選択されている。このようにパスを選択すると、各照射角度θにおいてパスは歯列TRに直交又は直交に近い値を採る(なお、「直交」とは、「X線ビームが歯と歯の間を通り抜けるようにしたい」との意味であり、必ずしも90度を意味するものではない)。このため、このようなパスに沿ったスキャンは、所謂、直交撮影と呼ばれる。このような観点を加味して、X線ビームXBのパスは例えば図3に示すように設定される。
しかしながら、上述の構成を実施すると、X線強度が低いので、検出器32に入射する単位時間当たりのフォトン数が少なくなる。このため、既存のトモシンセス法で画像を再構成すると、画素濃度が低いことから、ノイズの影響も大きく、また濃度ムラも大きい。
そこで、本実施形態では、照射するX線強度を下げた場合でも、耐ノイズ性も高く、構造物の実際の大きさや形状を反映した高精細な3次元的広がりを持つ画像(3次元的画像)を提供可能な画像再構成法をも併せて採用する。この画像再構成法を実施した処理は後述される。
一方、歯列TRがリング体12の幾何学的中心Oに位置していないこと、X線管31及び検出器32を円形軌道OBに沿って動かし、且つ、直交撮影の撮影を優先していることによって、X線照射角度θの値毎に、歯列TRとX線管31との間の距離が大きく変化する。つまり、歯列をスキャンしたときの拡大率がX線照射角度θ毎に変わる。拡大率とは、歯の実際の大きさとその歯の陰影が検出器32の検出面に作る投影像の大きさとの比である。これを、図4を使って説明する。このため、上述した画像処理法は、この拡大率の影響を排除又は低減する処理をも含む。これは、画像再構成の全体処理と伴に後述される。
さらに、本実施形態に係るX線口外撮影装置では、X線管31及び検出器32は幾何学的な中心O(固定)を持つ円形軌道OBに沿って互いに独立して回転(移動)するものの、前述したように直交撮影に重きを置いていることから、回転角度θの夫々の位置におけるX線ビームXBのパスは必ずしも幾何学中心Oを通過していない。幾何学的中心Oを通過していないというよりも、直交撮影を優先して、幾何学中心Oに囚われずにX線ビームXBのパスを設定している、と言える。幾何学中心Oを通過しているX線ビームXBのパスは1回のスキャンの間で前歯の中心部の1点を通過するパスと、左右それぞれの臼歯部の1点を通過する、合計3箇所に過ぎない(図3参照)。
さらに、この管電流Iの制御に代えて又は一緒に、X線透過データの収集時間を制御してもよい。この概念を、図7~10を用いて説明する。
ΣC/Si=ΣTi=全体の収集時間(ここで、Cは定数)
となるようにX線管31及び検出器32の移動を制御すればよい。この様子を図8に示す。
ΣC/(Si・Ai)=ΣTi=全体の収集時間
となるように、X線管31と検出器32の移動(回転)を制御する。この制御の一例を図10に示す。これにより、パノラマ画像の横方向(つまり、X線ビームXBをスキャンさせる方向)の濃度が一定値に近づく。なお、この濃度ムラの調整とともに、前述したように、パノラマ画像の縦方向における拡大率の補正を行なうことが望ましい。
本実施形態では、さらに、コリメータ33の位置及び姿勢が制御されることも1つの特徴である。この趣旨を以下に説明する。
さらに、本実施形態に係るスキャン装置10には、X線管31及び検出器32の回転位置を検出する回転センサ36,37、及び、被検体Pの顎部がスキャンに動いたことを検知する動きセンサ38を備えている。回転センサ36,37は、コントローラが指令するモータ駆動用のパルス信号のパルス数から演算により求めるようにしてもよい。
さらに、本実施形態に係るX線口外撮影装置1において実施される、顎の角度をチェックするためのプリスキャン、及び、データ収集のためのメインスキャンについて説明する。
このX線口外撮影装置1では、1回のスキャンに伴う患者に対するX線被曝の量が少ないので、実際の診療のための画像データ(フレームデータ)を収集するメインスキャンに先立ってプリスキャンを実施する。プリスキャンを実施した場合でも、患者のX線被曝量を低く抑えることができる。プリスキャンは、画素サイズを荒くして、電流を下げ、かつ高速にデータ収集を行うものである。
次に、図14を参照して、コントローラ55の制御下で実行されるメインスキャンの制御を説明する。
一方、患者の顎部の撮像を行う場合は、後述するように、撮像空間ISにおける歯列の実体位置を正確に把握した3D再構成が実行される。これは、図29に概説するように、3D基準断層面SSから、X線管31を睨むX線の斜めの照射方向に沿って投影が行われ、歯列などの撮像対象(実体物)の3次元位置が高精度に同定される。以下、この位置同定の処理を含む撮像を説明する。
撮像を説明する前に、ファントムを使った、撮像空間における基準断層面に対する撮像系の3次元構造を示す幾何学的なパラメータの値や変化量を推定する処理、すなわちキャリブレーションを説明する。このキャリブレーションの結果は、画像再構成に反映させられるとともに、必要に応じて、撮像空間の構造解析や設計に用いられる。
図16に、このファントム(ファントム装置)101の一部破断した外観を示す。このファントム101は、かかるキャリブレーションに必要なパラメータの測定を1個で間に合わせることができる万能型ファントムである。なお、本発明に係るファントムは、必ずしも、この万能型ファントムに限定されるものではなく、後述するように3D画像再構成に必要なパラメータをキャリブレーションを実施できるものであれば、その形態は様々に変形可能であることは勿論である。この変形例の幾つかも後に説明される。
ここで、X線口外撮影装置1における再構成の基本原理を数式的に説明する。
上述した図22(B)に示す距離関係を用いてゲインと呼ばれる量(=ΔX/ΔFi)を求める。
x=[(Rs+Rd)/{Rs+(D-αθ1)}]・(D-αθ1)sinθ1 … (1)
の関係が成り立つ。αθ1を補正項M(=αθ1)と捉えると、θ1及びxは微小なので、近似式として
Δx/Δθ={(Rs+Rd)/(Rs+(D-M))}(D-M) … (2)
が成り立つ。
Δx/Δθ=(Δx/ΔFi)(ΔFi/Δθ) … (3)
なので、
Δx/ΔFi=(Δθ/ΔFi){(Rs+Rd)/(Rs+(D-M))}(D-M) … (4)
となる。
次に、図23に基づいて、撮像空間の構造解析やキャリブレーションに必要なパラメータを測定するための演算について説明する。つまり、ここで挙げるパラメータとしては、
・構造解析において、X線管・回転中心距離RS、X線管・回転中心距離RS、X線管31の検出器32に対するZ軸方向の高さB1、及び、
・キャリブレーションにおいて、ゲインΔx/ΔFi、X線照射角度θ、角速度曲線Δθ/ΔFi、回転中心・基準断層面距離D、補正項M、移動する回転中心RCのXY面上の座標(CX,CY)
である。
処理1(ファントムの設置とキャリブレーション用のX線撮影(スキャン))、
処理2(ゲインΔx/ΔFiのプロファイルの演算)、
処理3(X線照射角度θのずれ(実際の投影角度θ´)の演算)
処理4(角速度曲線θ=f(Fi):Δθ/ΔFiの演算)、
処理5(パラメータRs,Rd,B1の演算)、
処理6(パラメータΔx/ΔFi、θ、Δθ/ΔFi、D、M、(CX,CY)の演算、更新:つまりキャリブレーション)
及び、
処理7(歯列の実体位置を抽出した3D再構成)
が挙げられる。これを処理は、コントローラ55と画像プロセッサ54が協働して実行する、図23に示すフローチャートの中で実行される。このフローチャートに沿って説明する。
コントローラ55はオペレータにファントム101を、X線口外撮影装置1の撮像空間ISの所定位置に設置するように画面や音声で指示する(ステップS31)。この所定位置とは、撮像時に患者Pが顎を載せるチンレスト25の位置である。
次いで、画像プロセッサ54はゲインΔX/ΔFiを求める(ステップS34)。
次に、X線照射角度θに対する実際の照射角度(投影角度)θ´のずれ量θshiftを演算する(ステップS37)。
実際の照射角度θ´のずれ量θshift=arctan(L/DS)
の演算を角度θ(=0°、±15°、±30°、…)毎に行う。これにより、所定値刻みのX線照射角度θそれぞれに対する実際の照射角度θ´のずれ量Pshiftを求めることができる。このずれ量Pshiftの例を図25に示す。
次に、画像プロセッサ54は、投影角曲線θ=f(Fi)、すなわち角速度曲線Δθ/ΔFiを演算する(ステップS38)。
次に、画像プロセッサ54は、X線ビームの照射角度θ=0°のときのX線管・回転中心間距離RS、検出器・回転中心間距離Rd、及び、X線管の焦点位置の高さ情報B1を定数パラメータとしてパノラマ画像から演算する(ステップS39)。
Δx/ΔFi=(Δθ/ΔFi){(Rs+Rd)/(Rs+D)}D … (5)
と表すことができる。マーカ114,115に対する画像の拡大率の計算から
(Rs+Rd)/(Rs+D)=(B3(D)-B2(D))/67=K(D) … (6)
が成り立つ。ここで、拡大率K(D)は、検出器32により、基準断層面の位置であってX線照射角度θ=0°の位置にあるマーカ114,115の投影点B2,B3の位置を検出すれば判るので、既知の値である。
(Rs+Rd)/(Rs+D+20)=(B3(D+20)-B2(D+20))/67=K(D+20) … (7)
が成り立ち、拡大率K(D+20)は、検出器32により、基準断層面よりも20mm外側の位置であってX線照射角度θ=0°の位置にあるファントムの投影点B2,B3の位置を検出すれば判るので、既知の値である。
(Rs+Rd)/(Rs+D)=K(D) … (8)
(Rs+Rd)/(Rs+D+20)=K(D+20) … (9)
において、
X=Rs+Rd,Y=Rs+D … (10)
とおくと、
X/Y=K(D) … (11)
X/(Y+20)=K(D+20) … (12)
となり、この2つの式からX,Yの値を求めておく。
Δx/ΔFi=(Δθ/ΔFi)・K(D)・D … (13)
と書き換えることができる。この(13)式において、回転中心・基準断層面間距離D以外の項は既知であるので、(13)式からX線照射角度θ=0°における回転中心・基準断層面間距離Dが分かる。距離Dが既知になると、X,Yの値が既に分っているので、(10)式を使って、X線照射角度θ=0°におけるX線管・回転中心間距離RS、及び、検出器・回転中心間距離Rdがそれぞれ求められる。
(B2(D+20)-B1)/H=K(D+20) … (14)
(B2(D)-B1)/H=K(D) … (15)
の2式を解くことで、X線管31の上下方向(Z軸方向)の位置B1、及び、下側のファントムのX線管31からの高さHを求める。
このときには、照射角度θ毎のX線管31、検出器32、回転中心RC、及びファントム(マーカ)の幾何学的な位置関係は、図28のように表される。
Δx/ΔFi=(Δθ/ΔFi){(Rs+Rd)/(Rs+(D-M))}(D-M)
を用いる必要がある。既に、各X線照射角度θにおける補正項M以外の項は演算されているので、それらを(4)式に当てはめて補正項Mが演算される(ステップS42)。このようにステップS40~S42を通して、関数パラメータΔx/ΔFi、θ、Δθ/ΔFi、D、M、(CX,CY)が演算される。
次に、図30を用いて、コントローラ55及び画像プロセッサ54が協働して実行される撮像のための処理を説明する。この処理には、上述したように、スキャンによりデータ収集、プレ処理としての基準面パノラマ画像の再構成、並びに、メインの処理としての3次元オートフォーカス画像(3次元表面画像)の作成及びその3次元オートフォーカス画像を用いた各種態様に応じた表示や計測などが含まれる。
まず、コントローラ55は、被検体Pの位置決めなど撮影の準備が済むと、操作器58を介して与えられる操作者の指示に応答し、データ収集のためのスキャンを指令する(図30、ステップS51)。これにより、回転駆動機構30A、移動機構30B、及び、高電圧発生器41が予め設定されている制御シーケンスに沿って駆動するように指令される。このため、X線管31及び検出器32の対を被検体Pの顎部の周囲に回転させながら、その回転動作の間に、X線管31にパルス状又は連続波のX線を所定周期で又は連続的に曝射させる。このとき、X線管31及び検出器32の対は、前述したようにキャリブレーションされた3D基準断層面SSを焦点化するように予め設定されている駆動条件に基づいて回転駆動される。この結果、X線管31から曝射されたX線は被検体Pを透過して検出器32により検出される。したがって、前述したように、検出器32から例えば300fpsのレートでX線透過量を反映したデジタル量のフレームデータ(画素データ)が出力される。このフレームデータはバッファメモリ53に一時保管される。
次いで、画像プロセッサ54は操作者から操作器58を使って基準面パノラマ画像PIstにROI(関心領域)が設定するか否かを判断する(ステップS54)。ここで設定するROIは、読影者が特に関心を寄せる例えば矩形状の部分領域である。勿論、ROIは必ずしも矩形でなくてもよい。なお、このROIは、後述するオートフォーカスにより作成したパノラマ画像について設定してもよく、この処理も後述される。
これに対して、3Dオートフォーカス画像を作成すると判断した場合(ステップS58、YES)、ステップS59のサブルーチン処理に移行する。このステップS59で実行される処理は、本発明の特徴の一つを成すもので、回転中心RCの位置変化を考慮し、且つ、各画素から常にX線管31のX線焦点を睨んだオブリークな投影方向DRxに沿って、歯列の縦方向の歪みを補正しながら行なう、自動的な歯列の実存位置・形状の同定処理である。
上述したステップS167の判断がYESとなると、画像プロセッサ54はステップS165において特定し記憶していた最適焦点の断面位置を表すデータを読み出す(ステップS169)。この断面位置のデータは、それぞれの判断位置P(x、y、z)を通る投影方向DRxの位置である。この様子を図49に模式的に示す。同図において、黒丸は3D基準画像PIref(3D基準断層面SS)の判断位置P(x、y、z)を示す。ここで、湾曲した3D基準画像PIrefの縦方向及び横方向を(i, j)と表す。図49において、白丸で示す如く、例えば、i,j=0,0の判断位置P(x00、y00、z00)に対する最適焦点断面位置が内側(X線管の側)に1つ寄った断層面SR1の位置であり、その隣のi,j=0,1の判断位置P(x01、y01、z01)に対する最適焦点断面位置が内側さらに1つ寄った断層面SR2の位置であり、その隣のi,j=0,2の判断位置P(x02、y02、z02)に対する最適焦点断面位置が内側さらに1つ寄った断層面SR3の位置であり、といった具合になる。なお、図49は、図を見易くするため、Z軸方向(縦方向)の1つの位置におけるステップS168を示しているが、このZ軸方向の他の位置それぞれについてもステップS168の処理が実行される。
この後、画像プロセッサ54は、その3Dオートフォーカス画像PIfocusを他の態様で観察する機会を操作者に与える。つまり、画像プロセッサ54は、操作者から操作情報に基づいて、その3Dオートフォーカス画像PIfocusを他の態様でインターラクティブに表示するか否かを判断する。
以上説明したX線口外撮影装置1は、具体的には、様々な態様で設置できる。例えば、図55に示すように、スキャン装置10を治療椅子の背もたれにアーム201を介して固設又は着脱自在に取り付け、患者は治療椅子に座った状態で、上から吊持されたスキャン装置10の装着を受けるようにしてもよい。この図55の装着例においては、更にスキャン装置10を、患者Pの肩に置いた肩パッド202によっても支持するようにしている。これにより、患者Pの顎部の位置決めもより容易になる。アーム201はキャスタ付きのポール202に取り付けられており、このポール202には、コンピュータ11およびタッチパネル式のモニタ60及び操作器61が取り付けられている。この図55の装着例の変形としては、スキャン装置10自体を患者の肩又は頭部に肩パッド又は頭部パットを介して単独で設置した状態で撮像するようにしてもよい。
続いて、図58~図68を参照して、本発明の第2の実施形態に係るX線断層像撮影装置を説明する。
10,301 スキャン装置
11 コンピュータ
21 リング体
31 X線管
31U X線管ユニット
32、32A 検出器
32U 検出器ユニット
33 コリメータ
54 画像プロセッサ
55 コントローラ(CPU)
300 X線断層像撮影装
302 本体キャビネット
311 第1のアーム
312 第2のアーム
320 支持部
P 被検体
OB、OB1、OB2 軌道
TR 歯列
IS 撮像空間
O 回転中心
CA 中心軸
Claims (24)
- 供給される電流の値に応じた量のX線を照射するX線管と、
前記X線に応答する複数の画素を2次元に配列して当該X線を入射させる入射面を有し、当該X線の入射に応じて前記複数の画素からデジタル電気量のデータをフレーム毎に出力する検出器と、
曲線状の軌道を供するとともに、前記X線管及び前記検出器を当該軌道に沿って互いに独立して移動可能な状態で当該X線管及び当該検出器を支持する支持手段と、を備えたデータ収集器と、
前記データ収集器が提供する前記軌道の内側に置かれる撮像対象に対して当該撮像対象の所望の断面のスキャン方向の各位置にて前記X線が常に所望の角度で透過するように、前記X線管及び前記検出器を前記軌道に沿って互いに独立して移動させる移動手段と、
前記データ収集器により収集された前記データを用いて前記断面のパノラマ画像をトモシンセス法により生成するパノラマ画像生成手段と、
前記データ収集器により収集された前記データと前記パノラマ画像生成手段により生成された前記パノラマ画像とを用いて、前記撮像対象に在る構造体の焦点が最適化され且つ前記X線のパスの角度の違いに起因した歪を抑制した断層像を生成する断層像生成手段と、
を備えたことを特徴とするX線断層像撮影装置。 - 前記移動手段が前記X線管及び前記検出器を移動させている間に、前記X線の単位時間当たりに照射されるX線量が前記各位置で均一化されるように当該X線量を調整するX線量調整手段を備えた特徴とする請求項1に記載のX線断層像撮影装置。
- 前記X線量調整手段は、前記各位置に応じて前記X線管に供給する前記電流の値を調整する管電流調整手段、前記各位置に応じて前記X線管に印加する管電圧を調整する管電圧調整手段、及び、前記各位置に応じて前記検出器による前記データの収集時間を調整する収集時間調整手段のうちの少なくとも一方で構成されることを特徴とする請求項2に記載のX線断層像撮影装置。
- 前記撮像対象は、被検者の顎部の歯列であり、
前記管電流調整手段は、前記X線のパスが前記歯列のスキャンによって陰影障害となる頸椎を通るパスであるときに、前記電流の値を他のパスを通るときのそれよりも大きくする手段である、ことを特徴とする請求項3に記載のX線断層像撮影装置。 - 前記撮像対象は、被検者の顎部の歯列であり、
前記収集時間調整手段は、前記X線のパスが前記歯列のスキャンによって陰影障害となる頸椎を通るパスであるときに、前記収集時間を他のパスを通るときのそれよりも長くする手段である、ことを特徴とする請求項3又は4に記載のX線断層像撮影装置。 - 前記パノラマ画像生成手段により生成された前記パノラマ画像の前記スキャン方向とは直交する高さ方向の歪みを、当該高さ方向における前記X線の前記断面に対する拡大率の、前記スキャン方向の位置間のばらつきに基づいて補正する拡大率補正手段を備えたことを特徴とする請求項1~5の何れか1項に記載のX線断層像撮影装置。
- 前記データ収集器は、前記X線管から照射される前記X線をコリメートするコリメータを当該X線管に対して独立して移動可能に備え、
前記移動手段は、前記スキャン方向の各位置における前記X線の前記断面に対する透過角度に応じて、前記コリメータを前記X線管に対して移動させる手段を備える、ことを特徴とする請求項1~6の何れか一項に記載のX線断層面撮影装置。 - 前記コリメータは、前記X線の照射方向に直交する方向に移動可能に、又は、当該照射方向に対して回転可能に備えられている、ことを特徴とする請求項7に記載のX線断層面撮影装置。
- 前記軌道は、円形又は楕円形の軌道であることを特徴とする請求項1~8の何れか一項に記載のX線断層像撮影装置。
- 前記軌道は、前記撮像対象を含む被検体の部位を内在可能な円形であることを特徴とする請求項1~9の何れか一項に記載のX線断層像撮影装置。
- 前記軌道体は、前記軌道を提供するも、その円形の軌道体の一部が開放されていることを特徴とする請求項10に記載のX線断層像撮影装置。
- 前記X線管は0.3mm以下の径のX線焦点を有し、前記支持手段は前記X線管の焦点位置と前記検出器の入射面との間の距離は40cm以下になるように前記X線管及び前記検出器を支持する、ことを特徴とする請求項1~11の何れか一項に記載のX線断層像撮影装置。
- 前記データ収集器は、少なくとも前記データの収集時には前記支持手段の外側を前記X線に対して遮蔽するX線遮蔽手段を有する、ことを特徴とする請求項12に記載のX線断層像撮影装置。
- 前記断層像生成手段は、
前記データ収集器により収集された前記データを用いて前記撮像対象の前記所望の断面の投影画像を基準面画像として再構成する基準面画像再構成手段と、
前記基準面画像のデータと前記検出器が出力したデータとを用いて3次元の前記最適焦点画像を作成する最適焦点画像作成手段と、を備えたことを特徴とする請求項1~13の何れか一項に記載のX線断層像撮影装置。 - 前記所望の断面は、前記X線管と前記検出器との間の空間において湾曲した矩形状の3次元(3D)基準断層面であり、
前記撮像撮像は、被検体の歯列であり、
前記基準面画像再構成手段は、前記歯列のパノラマ画像を再構成する手段である、ことを特徴とする請求項14に記載のX線断層像撮影装置。 - 前記画像作成手段は、
前記3D基準断層面に沿う複数の断層面を、当該3D基準断層面に対向した方向に設定する断層面設定手段と、
前記複数の断層面のそれぞれの画素値を演算する画素値演算手段と、
前記3D基準断層面と前記画素値演算手段により画素値が与えられた前記複数の断層面との画像データを用いて前記撮像部位の最適焦点化されたサンプル位置を同定する位置同定手段と、
前記位置同定手段により同定されたサンプル位置に、前記X線管から当該各サンプル位置を介して前記検出器を臨む視線上に存在し且つ前記パノラマ画像の対応するサンプル点の画素値に基づく画素を与える画素値付与手段と、
前記画素値付与手段により画素値が付与された前記サンプル位置における前記3D基準断層面及び前記複数の断層面が有する画素値が示す特性をパターン認識することにより前記歯列を決定する歯列決定手段と、
前記歯列決定手段により決定された前記歯列の特異点を除去する特異点除去手段と、を備えたことを特徴とする請求項15に記載のX線断層像撮影装置。 - 前記特異点除去手段は、前記サンプル点のそれぞれにおける前記周波数特性に基づいて同種の特性を示す物質毎に分類する分類手段と、この分類手段により分類された物質毎に当該各物質を滑らかに繋ぐスムージング手段とを備えた、ことを特徴とする請求項16に記載のX線断層像撮影装置。
- 当該X線断層像撮影装置は、前記検出器により収集されたフレームデータを用いてCT(Computed Tomography)法に基づく断層像の再構成するCT画像再構成手段を有し、
前記移動手段は、前記X線管と前記検出器とを互いに正対させた状態で前記軌道上を移動させる手段であり、
前記トモシンセス法に代えてCT撮影を行いたいときに前記検出器の姿勢を切り換える切換手段を有することを特徴とする請求項1~17の何れか一項に記載のX線断層像撮影装置。 - 前記切換手段は、
前記X線管と前記検出器とを前記被検体の体軸方向の頭部よりに所定距離だけ移動させる位置変更手段と
前記検出器を、前記撮像対象としての被検体の顎部に前記トモシンセス法を実施するときの第1の姿勢から、前記被検体の顎部に前記CT法を実施するときの第2の姿勢に変わるように当該検出器の角度を変更する角度変更手段と、
を備える請求項18に記載のX線断層像撮影装置。 - 前記検出器の前記入射面は互いに直交する第1の辺及び第2の辺を有し、
第1の辺の方向に並ぶ前記画素の数は前記第2の辺の方向に並ぶ前記画素の数よりも少なく、
前記角度変更手段は、前記検出器を、前記撮像対象としての被検体の顎部に前記トモシンセス法を実施するときに前記第1の辺の方向が横方向になる第1の姿勢から、前記被検体の顎部に前記CT法を実施するときに前記第2の辺の方向が横方向になる第2の姿勢に変わるように当該検出器の角度を変更するように構成された手段である、請求項19に記載のX線断層像撮影装置。 - 前記データ収集器は、前記X線器の前記入射面に入射するX線の領域を変更するための変更可能な開口を有するコリメータと、
前記第1の姿勢及び前記第2の姿勢に応じて前記コリメータの開口の面積を制御する第1の開口制御手段と、を有することを特徴とする請求項19に記載のX線断層像撮影装置。 - 前記軌道は、前記X線管と前記検出器とが前記被検体の顎部の周りに回転するときの回転中心からの径が所定長さの第1の軌道と、当該回転中心からの径が第1の軌道のそれよりも長い第2の軌道とを含み、
前記支持手段は、
前記X線管を前記第2の軌道に沿って移動可能に支持する第1のアームと、
前記検出器を前記第1の軌道に沿って移動可能に支持する第2のアームと、
を備えたことを特徴とする請求項18~21の何れか一項に記載のX線断層像撮影装置。 - 前記第1のアームは、前記X線管を前記検出器に正対させた状態で支持し且つ当該X線管を前記第2の軌道に沿って移動可能に支持し、
前記第2のアームは、前記検出器を前記X線管に正対させた状態で支持し且つ当該検出器を前記第1の軌道に沿って移動可能に支持する、
ように構成した請求項22に記載のX線断層像撮影装置。 - 前記CT撮影を行うときに、前記顎部の歯列の全域をCT撮影するのか又は当該歯列の部分をCT撮影するのかをオペレータとの間でインターラクティブに決めるCT撮影モード決定手段と、
このCT撮影モード決定手段により決定されたCT撮影の態様に応じて前記コリメータの開口の面積を制御する第2の開口制御手段と、
を備えたことを特徴とする請求項20~23の何れか一項に記載のX線断層像撮影装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201180044020.3A CN103096804B (zh) | 2010-07-13 | 2011-07-13 | X射线断层像摄影装置 |
| KR1020137002836A KR101819257B1 (ko) | 2010-07-13 | 2011-07-13 | X선 단층상 촬영 장치 |
| US13/809,693 US9668705B2 (en) | 2010-07-13 | 2011-07-13 | X-ray tomogram imaging device |
| JP2012524578A JP5878121B2 (ja) | 2010-07-13 | 2011-07-13 | X線断層像撮影装置 |
| EP11806822.0A EP2614773B1 (en) | 2010-07-13 | 2011-07-13 | X-ray tomogram imaging device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010-158542 | 2010-07-13 | ||
| JP2010158542 | 2010-07-13 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012008492A1 true WO2012008492A1 (ja) | 2012-01-19 |
Family
ID=45469489
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/065987 WO2012008492A1 (ja) | 2010-07-13 | 2011-07-13 | X線断層像撮影装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9668705B2 (ja) |
| EP (1) | EP2614773B1 (ja) |
| JP (1) | JP5878121B2 (ja) |
| KR (1) | KR101819257B1 (ja) |
| CN (1) | CN103096804B (ja) |
| WO (1) | WO2012008492A1 (ja) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130279646A1 (en) * | 2012-04-23 | 2013-10-24 | Rigaku Corporation | 3 dimensional x-ray ct apparatus, 3 dimensional ct image reconstruction method, and program |
| JP2014049109A (ja) * | 2012-08-29 | 2014-03-17 | Utechzone Co Ltd | アイコントロールコミュニケーションシステム |
| CN103892856A (zh) * | 2012-12-31 | 2014-07-02 | 深圳先进技术研究院 | 一种获取人体骨密度值的方法及系统 |
| JP2014161590A (ja) * | 2013-02-27 | 2014-09-08 | Tele Systems:Kk | 歯科用x線撮像装置及び歯科用x線撮像における画像補正方法 |
| JP2014161510A (ja) * | 2013-02-25 | 2014-09-08 | Tele Systems:Kk | パノラマ撮像装置及びパノラマ画像の再構成方法 |
| JP2014171578A (ja) * | 2013-03-07 | 2014-09-22 | Morita Mfg Co Ltd | 医療用x線撮影装置 |
| WO2015026163A1 (ko) * | 2013-08-20 | 2015-02-26 | 주식회사바텍 | 엑스선 영상 장치 |
| WO2015030472A1 (ko) * | 2013-08-27 | 2015-03-05 | 주식회사바텍 | 씨티 촬영 장치 및 씨티 촬영 방법 |
| WO2015072805A1 (ko) * | 2013-11-18 | 2015-05-21 | 주식회사바텍 | 씨티 촬영 장치, 씨티 촬영 방법, 씨티 촬영을 위한 표적 팬텀 및 이를 이용한 씨티 영상 |
| WO2015111979A1 (ko) * | 2014-01-24 | 2015-07-30 | 주식회사바텍 | 씨티 촬영 장치 |
| JP2016106964A (ja) * | 2014-12-09 | 2016-06-20 | キヤノン株式会社 | マンモ断層撮像システム |
| JP2016540600A (ja) * | 2013-12-18 | 2016-12-28 | プランメカ オイ | 歯科パノラマ画像の生成 |
| US20180208561A1 (en) * | 2014-07-16 | 2018-07-26 | Development Center For Biotechnology | Quinoxaline compounds, method for preparing the same and use thereof |
| JP2019033810A (ja) * | 2017-08-10 | 2019-03-07 | 学校法人日本大学 | 歯科用x線撮影装置 |
| US11357468B2 (en) * | 2012-12-03 | 2022-06-14 | Samsung Electronics Co., Ltd. | Control apparatus operatively coupled with medical imaging apparatus and medical imaging apparatus having the same |
| JP7436463B2 (ja) | 2018-09-14 | 2024-02-21 | プランメド オイ | デジタル乳房トモシンセシス撮影装置の自己較正手順 |
| JP7604399B2 (ja) | 2019-06-03 | 2024-12-23 | プランメカ オイ | Ct撮像装置 |
| US12193865B2 (en) | 2020-03-02 | 2025-01-14 | Adaptix Ltd | X-ray sensor |
Families Citing this family (82)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102469977B (zh) * | 2009-07-30 | 2015-04-01 | 株式会社电视系统 | 放射线摄像装置及其放射线摄像方法 |
| US10039441B2 (en) * | 2010-12-22 | 2018-08-07 | Trophy | Digital detector |
| KR101223936B1 (ko) * | 2011-05-12 | 2013-01-21 | 주식회사 모르페우스 | 엑스선 촬영장치 |
| KR102124669B1 (ko) * | 2012-09-07 | 2020-06-18 | 트로피 | 부분적인 ct 이미징을 위한 장치 |
| US9864184B2 (en) | 2012-10-30 | 2018-01-09 | California Institute Of Technology | Embedded pupil function recovery for fourier ptychographic imaging devices |
| US9497379B2 (en) | 2013-08-22 | 2016-11-15 | California Institute Of Technology | Variable-illumination fourier ptychographic imaging devices, systems, and methods |
| WO2014070656A1 (en) | 2012-10-30 | 2014-05-08 | California Institute Of Technology | Fourier ptychographic imaging systems, devices, and methods |
| US10652444B2 (en) | 2012-10-30 | 2020-05-12 | California Institute Of Technology | Multiplexed Fourier ptychography imaging systems and methods |
| USRE48415E1 (en) * | 2012-11-08 | 2021-02-02 | J. Morita Manufacturing Corporation | X-ray photography apparatus |
| WO2014165611A1 (en) * | 2013-04-02 | 2014-10-09 | The Regents Of The University Of California | Thermoplastic 3-d phantom |
| US9426455B2 (en) | 2013-07-31 | 2016-08-23 | California Institute Of Technology | Aperture scanning fourier ptychographic imaging |
| CN103400363A (zh) * | 2013-08-06 | 2013-11-20 | 深圳市安健科技有限公司 | X射线影像拼接方法及系统 |
| WO2015038986A1 (en) * | 2013-09-13 | 2015-03-19 | Baek Seung H | Dental x-ray imaging system having higher spatial resolution |
| ITBO20130669A1 (it) * | 2013-12-02 | 2015-06-03 | Cefla Coop | Metodo e apparato per effettuare una scout in un apparecchio radiografico digitale dentale |
| US10231681B2 (en) | 2013-12-02 | 2019-03-19 | Cefla Societá Cooperativa | Method and apparatus for adjusting technical exposure factors during radiographic acquisition |
| US11468557B2 (en) | 2014-03-13 | 2022-10-11 | California Institute Of Technology | Free orientation fourier camera |
| CN106572823B (zh) * | 2014-07-15 | 2020-11-20 | 皇家飞利浦有限公司 | 投影数据采集装置 |
| CN107072610A (zh) * | 2014-07-28 | 2017-08-18 | 韩国威泰有限公司 | X射线成像装置和x射线成像方法 |
| KR102285553B1 (ko) * | 2014-07-29 | 2021-08-05 | 주식회사 바텍 | 2차원 단층 영상 촬영장치 및 그 방법 |
| US10192003B2 (en) * | 2014-09-08 | 2019-01-29 | 3M Innovative Properties Company | Method of aligning intra-oral digital 3D models |
| PL229533B1 (pl) * | 2014-09-08 | 2018-07-31 | Univ Slaski | Sposób mapowania rozkładu parametrów fizycznych wzornika stosowanego w badaniach z wykorzystaniem fal elektromagnetycznych |
| EP3195804B1 (en) * | 2014-09-18 | 2022-07-06 | Vatech Ewoo Holdings Co., Ltd. | X-ray image forming device |
| KR102250729B1 (ko) | 2014-10-13 | 2021-05-11 | 주식회사바텍 | X선 파노라마 영상촬영장치 |
| EP3238135B1 (en) | 2014-12-22 | 2020-02-05 | California Institute Of Technology | Epi-illumination fourier ptychographic imaging for thick samples |
| EP3248208B1 (en) | 2015-01-21 | 2019-11-27 | California Institute of Technology | Fourier ptychographic tomography |
| EP3250908A4 (en) | 2015-01-26 | 2018-09-12 | California Institute of Technology | Multi-well fourier ptychographic and fluorescence imaging |
| JP6811716B2 (ja) * | 2015-02-27 | 2021-01-13 | トロフィー | 歯科撮像装置及び歯科放射線透過撮像のために対象者を位置決めする方法 |
| BR112017019077B1 (pt) * | 2015-03-09 | 2021-05-11 | Planmeca Oy | arranjo e método para rastreamento de movimentação da mandíbula de uma pessoa |
| US10684458B2 (en) | 2015-03-13 | 2020-06-16 | California Institute Of Technology | Correcting for aberrations in incoherent imaging systems using fourier ptychographic techniques |
| WO2016156911A1 (en) * | 2015-04-03 | 2016-10-06 | Trophy | Method and apparatus for aligning of cephalometric imaging device collimator |
| EP3289980A4 (en) | 2015-04-29 | 2019-01-16 | Vatech Ewoo Holdings Co., Ltd | DEVICE AND METHOD FOR X-RAY IMAGING |
| US10556129B2 (en) * | 2015-10-02 | 2020-02-11 | Varian Medical Systems, Inc. | Systems and methods for treating a skin condition using radiation |
| KR101892144B1 (ko) * | 2015-10-26 | 2018-08-28 | 주식회사 바텍 | 엑스선 영상 촬영장치 |
| US20170325909A1 (en) * | 2016-05-12 | 2017-11-16 | Fei Gao | Method for facilitating a tooth repositioning dental treatment |
| WO2017209662A1 (en) * | 2016-05-30 | 2017-12-07 | Prismatic Sensors Ab | X-ray imaging for enabling assessment of scoliosis |
| US11092795B2 (en) | 2016-06-10 | 2021-08-17 | California Institute Of Technology | Systems and methods for coded-aperture-based correction of aberration obtained from Fourier ptychography |
| US10568507B2 (en) | 2016-06-10 | 2020-02-25 | California Institute Of Technology | Pupil ptychography methods and systems |
| US10288762B2 (en) * | 2016-06-21 | 2019-05-14 | Morpho Detection, Llc | Systems and methods for detecting luggage in an imaging system |
| KR101880150B1 (ko) * | 2016-09-06 | 2018-07-19 | 오스템임플란트 주식회사 | 파노라마 영상 생성 방법, 파노라마 영상 생성 장치, 파노라마 엑스선 촬영 장치, 컴퓨터 판독 가능한 기록 매체 및 컴퓨터 프로그램 |
| US10861150B2 (en) | 2016-10-18 | 2020-12-08 | Vatech Co., Ltd. | Producing panoramic radiograph |
| KR102473815B1 (ko) * | 2016-10-18 | 2022-12-05 | 주식회사 바텍 | 엑스선 영상 표시 장치 및 그 방법 |
| US10282838B2 (en) * | 2017-01-09 | 2019-05-07 | General Electric Company | Image analysis for assessing image data |
| JP6666283B2 (ja) | 2017-02-23 | 2020-03-13 | 株式会社モリタ製作所 | X線断層撮影装置およびx線断層撮影方法 |
| CN106886022B (zh) * | 2017-02-28 | 2020-01-31 | 微美光速资本投资管理(北京)有限公司 | 一种近距离三维全息成像装置 |
| JP6734212B2 (ja) * | 2017-03-02 | 2020-08-05 | 株式会社モリタ製作所 | X線断層撮影装置およびx線断層撮影方法 |
| US11138697B2 (en) * | 2017-04-13 | 2021-10-05 | Shimadzu Corporation | X-ray imaging apparatus |
| CN110831503A (zh) | 2017-05-03 | 2020-02-21 | 特纳创新有限责任公司 | 三维x射线成像系统 |
| DE102017004705A1 (de) * | 2017-05-16 | 2018-11-22 | Ziehm Imaging Gmbh | Verfahren zum Erzeugen eines in der Zentralschicht vollständigen 3D-Datensatzes zur Volumenrekonstruktion und Röntgensystem mit einem Kegelstrahl-C-Bogen-Röntgengerät zur Durchführung des Verfahrens |
| WO2019000234A1 (zh) * | 2017-06-27 | 2019-01-03 | 深圳市奥沃医学新技术发展有限公司 | Ct系统参数确定方法及装置 |
| CN107203959B (zh) * | 2017-07-27 | 2021-07-23 | 上海联影医疗科技股份有限公司 | 图像获取方法、装置及数字化x射线摄影设备 |
| EP3675740B1 (en) | 2017-08-28 | 2022-06-15 | Shanghai United Imaging Healthcare Co., Ltd. | Systems and methods for determining rotation angles |
| WO2019090149A1 (en) | 2017-11-03 | 2019-05-09 | California Institute Of Technology | Parallel digital imaging acquisition and restoration methods and systems |
| JP6514756B1 (ja) * | 2017-11-30 | 2019-05-15 | ゼネラル・エレクトリック・カンパニイ | 接触回避装置、医用装置、およびプログラム |
| WO2019131859A1 (ja) * | 2017-12-28 | 2019-07-04 | 株式会社モリタ製作所 | X線ct撮影装置 |
| FI20187059A1 (en) | 2018-04-25 | 2019-10-26 | Athlos Oy | X-ray imaging device using ultra-fast scanning |
| EP3837533A1 (en) * | 2018-08-16 | 2021-06-23 | Thai Union Group Public Company Limited | Multi-view imaging system and methods for non-invasive inspection in food processing |
| EP3649957B1 (en) * | 2018-11-07 | 2023-07-19 | DENTSPLY SIRONA Inc. | Device and method for editing a panoramic radiography image |
| US11000256B2 (en) * | 2018-11-09 | 2021-05-11 | Palodex Group Oy | Calibrating an X-ray medical imaging device for cephalometric imaging |
| KR102346588B1 (ko) * | 2018-11-27 | 2022-01-04 | 한국전기연구원 | 고속 구강 방사선 센서 및 이를 포함하는 구강단층촬영장치 |
| EP4310864A3 (en) | 2018-11-30 | 2024-04-03 | Accuray, Inc. | Method and apparatus for improving scatter estimation and correction in imaging |
| US11357467B2 (en) * | 2018-11-30 | 2022-06-14 | Accuray, Inc. | Multi-pass computed tomography scans for improved workflow and performance |
| JP6936826B2 (ja) * | 2019-03-18 | 2021-09-22 | 株式会社モリタ製作所 | 画像処理装置、表示システム、画像処理方法、および画像処理プログラム |
| JP7207064B2 (ja) * | 2019-03-25 | 2023-01-18 | 株式会社島津製作所 | X線撮影装置 |
| GB2588385B (en) * | 2019-10-17 | 2022-08-03 | Adaptix Ltd | A system and method for obtaining an x-ray image of a subject |
| US11222435B2 (en) * | 2019-11-11 | 2022-01-11 | James R. Glidewell Dental Ceramics, Inc. | Determining rotation axis from x-ray radiographs |
| US11074720B1 (en) * | 2020-02-07 | 2021-07-27 | Aptiv Technologies Limited | System and method for calibrating intrinsic parameters of a camera using optical raytracing techniques |
| US11512946B2 (en) * | 2020-02-17 | 2022-11-29 | Purdue Research Foundation | Method and system for automatic focusing for high-resolution structured light 3D imaging |
| CN111419255A (zh) * | 2020-03-24 | 2020-07-17 | 深圳锐探科技有限公司 | 一种ct成像方法及装置 |
| JP7460426B2 (ja) * | 2020-03-31 | 2024-04-02 | 住友重機械工業株式会社 | X線ct装置 |
| WO2021212291A1 (zh) * | 2020-04-20 | 2021-10-28 | 西安大医集团股份有限公司 | 放射治疗系统及其中的应急控制方法、装置 |
| US11585766B2 (en) | 2020-05-29 | 2023-02-21 | James R. Glidewell Dental Ceramics, Inc. | CT scanner calibration |
| KR102527325B1 (ko) * | 2020-09-24 | 2023-05-02 | (주)레비스톤 | 프리뷰 기능이 있는 치과용 엑스레이 촬영 장치 |
| WO2022183078A1 (en) | 2021-02-25 | 2022-09-01 | California Institute Of Technology | Computational refocusing-assisted deep learning |
| JP7607485B2 (ja) * | 2021-03-24 | 2024-12-27 | 富士フイルム株式会社 | 画像処理装置、放射線画像撮影システム、画像処理方法、及び画像処理プログラム |
| US11647975B2 (en) | 2021-06-04 | 2023-05-16 | Accuray, Inc. | Radiotherapy apparatus and methods for treatment and imaging using hybrid MeV-keV, multi-energy data acquisition for enhanced imaging |
| US11605186B2 (en) | 2021-06-30 | 2023-03-14 | Accuray, Inc. | Anchored kernel scatter estimate |
| US11794039B2 (en) | 2021-07-13 | 2023-10-24 | Accuray, Inc. | Multimodal radiation apparatus and methods |
| US11854123B2 (en) | 2021-07-23 | 2023-12-26 | Accuray, Inc. | Sparse background measurement and correction for improving imaging |
| EP4129191A1 (de) * | 2021-08-06 | 2023-02-08 | DENTSPLY SIRONA Inc. | Optimierung extraoraler panoramaaufnahmen durch modellbasiertes vorwissen über die kieferbogenform des patienten |
| KR102613988B1 (ko) * | 2021-08-12 | 2023-12-15 | 오스템임플란트 주식회사 | 복수개의 치아에 대한 파노라마 이미지를 획득하는 방법, 디바이스 및 기록매체 |
| FI130999B1 (en) * | 2022-03-18 | 2024-07-23 | Planmeca Oy | Tomographic radiography and calibration |
| CN115486863A (zh) * | 2022-09-26 | 2022-12-20 | 北京纳米维景科技有限公司 | 一种具有管电流调制功能的静态ct成像设备及其成像方法 |
Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57203430A (en) | 1981-05-16 | 1982-12-13 | Tokyo Shibaura Electric Co | X-ray tomograph hotographing apparatus |
| JPH04144548A (ja) | 1990-10-05 | 1992-05-19 | Morita Mfg Co Ltd | デジタルパノラマx線撮影装置 |
| JPH0688790A (ja) | 1992-09-07 | 1994-03-29 | Toshiba Corp | ラミノグラフィー装置 |
| US5428660A (en) | 1993-11-19 | 1995-06-27 | Medical University Of South Carolina | Portable medical panoramic radiographic device |
| JPH10225454A (ja) * | 1996-12-10 | 1998-08-25 | Morita Mfg Co Ltd | X線撮影装置 |
| JPH10295680A (ja) | 1997-04-25 | 1998-11-10 | Toshiba Corp | X線断層撮影装置 |
| JPH11318816A (ja) | 1998-05-15 | 1999-11-24 | Olympus Optical Co Ltd | 内視鏡 |
| JP2001258876A (ja) * | 2000-02-22 | 2001-09-25 | Siemens Ag | X線装置及び医用設備 |
| JP2003290220A (ja) * | 2002-04-04 | 2003-10-14 | Hitachi Medical Corp | X線ct装置 |
| WO2006033483A1 (ja) * | 2004-09-24 | 2006-03-30 | Icat Corporation | 人体情報抽出装置、人体撮影情報の基準面変換方法および断面情報検出装置 |
| US20060203959A1 (en) | 2005-05-02 | 2006-09-14 | Oy Ajat Ltd. | Dental extra-oral x-ray imaging system and method |
| JP2007007358A (ja) * | 2005-06-30 | 2007-01-18 | Norihito Hatakeyama | 低拡大率で画像データを収集する医療検査用の高速撮影デジタルx線画像形成システム |
| JP2007136163A (ja) | 2005-10-21 | 2007-06-07 | Axion Japan:Kk | パノラマ画像撮影装置及びパノラマ撮影における画像処理方法 |
| JP2008110098A (ja) | 2006-10-31 | 2008-05-15 | Fujifilm Corp | 放射線断層画像生成装置 |
| JP2010042119A (ja) * | 2008-08-12 | 2010-02-25 | Yoshida Dental Mfg Co Ltd | X線断層撮影方法および装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5214686A (en) * | 1991-12-13 | 1993-05-25 | Wake Forest University | Three-dimensional panoramic dental radiography method and apparatus which avoids the subject's spine |
| JP3023633U (ja) | 1995-10-09 | 1996-04-23 | 株式会社モリタ製作所 | 歯科断層撮影用テストピース |
| JP3023663U (ja) | 1995-10-11 | 1996-04-23 | 進▲卿▼ 劉 | 洗浄ブラシ |
| WO2004086972A2 (en) | 2003-03-25 | 2004-10-14 | Imaging Therapeutics, Inc. | Methods for the compensation of imaging technique in the processing of radiographic images |
| US7186023B2 (en) | 2003-06-10 | 2007-03-06 | Shimadzu Corporation | Slice image and/or dimensional image creating method |
| US7676022B2 (en) * | 2005-05-02 | 2010-03-09 | Oy Ajat Ltd. | Extra-oral digital panoramic dental x-ray imaging system |
| EP1961383A4 (en) * | 2005-10-21 | 2011-02-23 | Axion Japan Co Ltd | PANORAMIC IMAGE CAPTURE DEVICE AND IMAGE PROCESSING METHOD FOR PANORAMIC IMAGE CAPTURE |
| US8306181B2 (en) * | 2008-03-13 | 2012-11-06 | Oy Ajat Ltd | Single sensor multi-functional dental extra-oral x-ray imaging system and method |
| EP2123223B1 (en) * | 2008-05-19 | 2017-07-05 | Cefla S.C. | Method and Apparatus for Simplified Patient Positioning in Dental Tomographic X-Ray Imaging |
| US9408579B2 (en) | 2010-05-11 | 2016-08-09 | Takara Telesystems Corp. | Radiation imaging apparatus and phantom used for the same |
-
2011
- 2011-07-13 KR KR1020137002836A patent/KR101819257B1/ko active IP Right Grant
- 2011-07-13 WO PCT/JP2011/065987 patent/WO2012008492A1/ja active Application Filing
- 2011-07-13 CN CN201180044020.3A patent/CN103096804B/zh not_active Expired - Fee Related
- 2011-07-13 EP EP11806822.0A patent/EP2614773B1/en not_active Not-in-force
- 2011-07-13 US US13/809,693 patent/US9668705B2/en not_active Expired - Fee Related
- 2011-07-13 JP JP2012524578A patent/JP5878121B2/ja active Active
Patent Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57203430A (en) | 1981-05-16 | 1982-12-13 | Tokyo Shibaura Electric Co | X-ray tomograph hotographing apparatus |
| JPH04144548A (ja) | 1990-10-05 | 1992-05-19 | Morita Mfg Co Ltd | デジタルパノラマx線撮影装置 |
| JPH0688790A (ja) | 1992-09-07 | 1994-03-29 | Toshiba Corp | ラミノグラフィー装置 |
| US5428660A (en) | 1993-11-19 | 1995-06-27 | Medical University Of South Carolina | Portable medical panoramic radiographic device |
| JPH10225454A (ja) * | 1996-12-10 | 1998-08-25 | Morita Mfg Co Ltd | X線撮影装置 |
| JPH10295680A (ja) | 1997-04-25 | 1998-11-10 | Toshiba Corp | X線断層撮影装置 |
| JPH11318816A (ja) | 1998-05-15 | 1999-11-24 | Olympus Optical Co Ltd | 内視鏡 |
| JP2001258876A (ja) * | 2000-02-22 | 2001-09-25 | Siemens Ag | X線装置及び医用設備 |
| JP2003290220A (ja) * | 2002-04-04 | 2003-10-14 | Hitachi Medical Corp | X線ct装置 |
| WO2006033483A1 (ja) * | 2004-09-24 | 2006-03-30 | Icat Corporation | 人体情報抽出装置、人体撮影情報の基準面変換方法および断面情報検出装置 |
| US20060203959A1 (en) | 2005-05-02 | 2006-09-14 | Oy Ajat Ltd. | Dental extra-oral x-ray imaging system and method |
| JP2007007358A (ja) * | 2005-06-30 | 2007-01-18 | Norihito Hatakeyama | 低拡大率で画像データを収集する医療検査用の高速撮影デジタルx線画像形成システム |
| JP2007136163A (ja) | 2005-10-21 | 2007-06-07 | Axion Japan:Kk | パノラマ画像撮影装置及びパノラマ撮影における画像処理方法 |
| JP2008110098A (ja) | 2006-10-31 | 2008-05-15 | Fujifilm Corp | 放射線断層画像生成装置 |
| JP2010042119A (ja) * | 2008-08-12 | 2010-02-25 | Yoshida Dental Mfg Co Ltd | X線断層撮影方法および装置 |
Non-Patent Citations (2)
| Title |
|---|
| R. MOLTENI: "A universal test phantom for dental panoramic radiography", MEDICAMUDI, vol. 36, no. 3, 1991 |
| See also references of EP2614773A4 |
Cited By (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130279646A1 (en) * | 2012-04-23 | 2013-10-24 | Rigaku Corporation | 3 dimensional x-ray ct apparatus, 3 dimensional ct image reconstruction method, and program |
| US10101284B2 (en) * | 2012-04-23 | 2018-10-16 | Rigaku Corporation | 3 Dimensional X-ray CT apparatus, 3 dimensional CT image reconstruction method, and program |
| JP2014049109A (ja) * | 2012-08-29 | 2014-03-17 | Utechzone Co Ltd | アイコントロールコミュニケーションシステム |
| US11357468B2 (en) * | 2012-12-03 | 2022-06-14 | Samsung Electronics Co., Ltd. | Control apparatus operatively coupled with medical imaging apparatus and medical imaging apparatus having the same |
| CN103892856A (zh) * | 2012-12-31 | 2014-07-02 | 深圳先进技术研究院 | 一种获取人体骨密度值的方法及系统 |
| JP2014161510A (ja) * | 2013-02-25 | 2014-09-08 | Tele Systems:Kk | パノラマ撮像装置及びパノラマ画像の再構成方法 |
| JP2014161590A (ja) * | 2013-02-27 | 2014-09-08 | Tele Systems:Kk | 歯科用x線撮像装置及び歯科用x線撮像における画像補正方法 |
| JP2014171578A (ja) * | 2013-03-07 | 2014-09-22 | Morita Mfg Co Ltd | 医療用x線撮影装置 |
| US10492742B2 (en) | 2013-03-07 | 2019-12-03 | J. Morita Manufacturing Corporation | Medical X-ray photography apparatus for pseudo intraoral radiography with user interface with rectangular frame lines |
| WO2015026163A1 (ko) * | 2013-08-20 | 2015-02-26 | 주식회사바텍 | 엑스선 영상 장치 |
| US10251615B2 (en) | 2013-08-20 | 2019-04-09 | Vatech Co., Ltd. | X-ray imaging device |
| US10004468B2 (en) | 2013-08-20 | 2018-06-26 | Vatech Co., Ltd. | X-ray imaging device and X-ray imaging method |
| US9974493B2 (en) | 2013-08-27 | 2018-05-22 | Vatech Co., Ltd. | Apparatus and method for obtaining computed tomography |
| WO2015030472A1 (ko) * | 2013-08-27 | 2015-03-05 | 주식회사바텍 | 씨티 촬영 장치 및 씨티 촬영 방법 |
| WO2015072805A1 (ko) * | 2013-11-18 | 2015-05-21 | 주식회사바텍 | 씨티 촬영 장치, 씨티 촬영 방법, 씨티 촬영을 위한 표적 팬텀 및 이를 이용한 씨티 영상 |
| CN110353717A (zh) * | 2013-12-18 | 2019-10-22 | 普兰梅卡有限公司 | 产生牙科全景图像 |
| JP2016540600A (ja) * | 2013-12-18 | 2016-12-28 | プランメカ オイ | 歯科パノラマ画像の生成 |
| WO2015111979A1 (ko) * | 2014-01-24 | 2015-07-30 | 주식회사바텍 | 씨티 촬영 장치 |
| US10265033B2 (en) | 2014-01-24 | 2019-04-23 | Vatech Co., Ltd. | CT photographic device comprising a rotary driving part and a linear driving part |
| US20180208561A1 (en) * | 2014-07-16 | 2018-07-26 | Development Center For Biotechnology | Quinoxaline compounds, method for preparing the same and use thereof |
| JP2016106964A (ja) * | 2014-12-09 | 2016-06-20 | キヤノン株式会社 | マンモ断層撮像システム |
| US10653377B2 (en) | 2014-12-09 | 2020-05-19 | Canon Kabushiki Kaisha | Breast computed tomography system comprising a gripper |
| JP2019033810A (ja) * | 2017-08-10 | 2019-03-07 | 学校法人日本大学 | 歯科用x線撮影装置 |
| JP7436463B2 (ja) | 2018-09-14 | 2024-02-21 | プランメド オイ | デジタル乳房トモシンセシス撮影装置の自己較正手順 |
| JP7604399B2 (ja) | 2019-06-03 | 2024-12-23 | プランメカ オイ | Ct撮像装置 |
| JP7606989B2 (ja) | 2019-06-03 | 2024-12-26 | プランメカ オイ | Ct撮像装置 |
| US12193865B2 (en) | 2020-03-02 | 2025-01-14 | Adaptix Ltd | X-ray sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103096804A (zh) | 2013-05-08 |
| US9668705B2 (en) | 2017-06-06 |
| JPWO2012008492A1 (ja) | 2013-09-09 |
| KR20140008287A (ko) | 2014-01-21 |
| KR101819257B1 (ko) | 2018-01-16 |
| CN103096804B (zh) | 2017-03-15 |
| JP5878121B2 (ja) | 2016-03-08 |
| EP2614773B1 (en) | 2018-01-03 |
| EP2614773A1 (en) | 2013-07-17 |
| EP2614773A4 (en) | 2016-11-09 |
| US20150305696A1 (en) | 2015-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5878121B2 (ja) | X線断層像撮影装置 | |
| KR101787119B1 (ko) | 방사선 촬상 장치 및 방사선에 의한 촬상 방법, 및 데이터 처리 장치 | |
| US20230371804A1 (en) | Dental imaging with photon-counting detector | |
| JP5878117B2 (ja) | 放射線撮像装置及び同装置に用いるファントム | |
| JP5696305B2 (ja) | 放射線撮像装置及び放射線による撮像方法 | |
| JP4844886B2 (ja) | パノラマ画像撮影装置及びパノラマ画像撮影方法 | |
| US9743893B2 (en) | Dental imaging with photon-counting detector | |
| WO2007046458A1 (ja) | パノラマ画像撮影装置及びパノラマ撮影における画像処理方法 | |
| JP2008086659A (ja) | 画像処理方法及びパノラマ画像撮影装置 | |
| JP5944012B2 (ja) | 光子カウント検出器による歯科用撮像 | |
| JP5830753B2 (ja) | X線ct撮影装置及びx線ct画像の表示方法 | |
| US11793476B2 (en) | Method and a system for obtaining operating parameters for x ray data acquisition | |
| JP5618292B2 (ja) | X線ct撮影装置及びx線ct画像の表示方法 | |
| JP5528052B2 (ja) | 放射線撮像装置及び同装置に用いるファントム装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201180044020.3 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11806822 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2012524578 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 20137002836 Country of ref document: KR Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011806822 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13809693 Country of ref document: US |