WO2011074583A1 - 作業車両の変速制御装置 - Google Patents
作業車両の変速制御装置 Download PDFInfo
- Publication number
- WO2011074583A1 WO2011074583A1 PCT/JP2010/072498 JP2010072498W WO2011074583A1 WO 2011074583 A1 WO2011074583 A1 WO 2011074583A1 JP 2010072498 W JP2010072498 W JP 2010072498W WO 2011074583 A1 WO2011074583 A1 WO 2011074583A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- shift
- speed
- vehicle speed
- vehicle
- transmission
- Prior art date
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2079—Control of mechanical transmission
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2253—Controlling the travelling speed of vehicles, e.g. adjusting travelling speed according to implement loads, control of hydrostatic transmission
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/264—Sensors and their calibration for indicating the position of the work tool
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
- F16H61/0204—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal
- F16H61/0213—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal characterised by the method for generating shift signals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/10—Road Vehicles
- B60Y2200/14—Trucks; Load vehicles, Busses
- B60Y2200/145—Haulage vehicles, trailing trucks
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H59/08—Range selector apparatus
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/50—Inputs being a function of the status of the machine, e.g. position of doors or safety belts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/16—Inhibiting or initiating shift during unfavourable conditions, e.g. preventing forward reverse shift at high vehicle speed, preventing engine over speed
Definitions
- the present invention relates to a shift control device for a work vehicle.
- a shift control device for a work vehicle such as a wheel loader
- a device that automatically changes a transmission speed stage when the vehicle speed reaches a set speed is known.
- a speed change control device configured to hold the set speed stage for a predetermined time when the height of the work equipment (bucket) calculated from the angle of the lift arm becomes equal to or higher than the set height.
- the upshift is performed immediately during reverse travel after excavation work. End up. Therefore, when switching to forward travel to load earth and sand on the dump truck, the flow of the vehicle during reverse deceleration increases, and work efficiency decreases. Also, when traveling forward and approaching a dump truck to load earth and sand, if the accelerator pedal is depressed little and the engine speed is low, the vehicle speed will reach the set speed before the bucket reaches the set height described above. It can happen that an upshift occurs unintentionally. Since the vehicle is accelerated by this shift up, the vehicle approaches the dump truck earlier than the operator expects. In this case, the operator must apply the brake to stop the vehicle and raise the bucket to a height where the dump truck can be loaded with earth and sand. As a result, the work efficiency may be reduced.
- a shift control device for a work vehicle is detected by a vehicle speed detection device that detects a vehicle speed of the work vehicle, a transmission that shifts up and down a transmission speed stage, and a vehicle speed detection device.
- the shift control device that permits the shift-up by the transmission
- the height position detection device that detects the height position of the work implement device
- the forward travel and the reverse travel of the work vehicle Shift-up control switching selection means for switching between a forward / reverse switching device for switching, normal control for shifting up by the transmission when the vehicle speed exceeds the shift-up permitted vehicle speed, and delay control for delaying the timing of shift-up relative to the normal control With.
- the speed stage of the transmission is 3rd speed or more
- the delay control is selected by the upshift control switching selection device
- the shift control device shifts the shift-up permission vehicle speed to the first shift when the height position of the work implement device detected by the height position detection device is lower than the set value.
- the shift-up permitted vehicle speed is set to a second shift-up permitted vehicle speed that is higher than the first shift-up permitted vehicle speed.
- the transmission control device for a work vehicle is 3rd speed or more, and the delay control is selected by the upshift control switching selection device.
- the shift control device sets the shift-up permission vehicle speed to a second shift-up permission vehicle speed that is higher than the first shift-up permission vehicle speed regardless of the height of the work implement device.
- the transmission speed stage is 3 or more, and the normal control is selected by the upshift control switching selection device.
- a wheel loader includes the shift control device according to the first to fourth aspects.
- the shift up can be arbitrarily switched between normal control and delay control, and the work efficiency of the work vehicle can be improved.
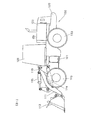
- the side view of the wheel loader which is an example of the working vehicle by one embodiment of this invention.
- A) (b) The figure explaining the change of the speed stage of the transmission at the time of reverse travel after excavation in one embodiment, and at the time of loading of earth and sand.
- FIG. 1 is a side view of a wheel loader that is an example of a work vehicle to which the shift control device according to the present embodiment is applied.
- the wheel loader 100 includes an arm 111, a front body 110 having a bucket 112 as a work implement device, a tire 113, and the like, and a rear body 120 having an operator cab 121, an engine compartment 122, a tire 123, and the like.
- the arm 111 rotates up and down (up and down) by driving the arm cylinder 114, and the bucket 112 rotates up and down (dump or cloud) by driving the bucket cylinder 115.
- the front vehicle body 110 and the rear vehicle body 120 are rotatably connected to each other by a center pin 101, and the front vehicle body 110 is refracted left and right with respect to the rear vehicle body 120 by expansion and contraction of a steering cylinder (not shown).
- FIG. 2 is a diagram showing a schematic configuration of the shift control device according to the present embodiment.
- An output shaft (not shown) of the torque converter 2 is connected to the output shaft of the engine 1, and an output shaft (not shown) of the torque converter 2 is connected to the transmission 3.
- the torque converter 2 is a fluid clutch including a known impeller, turbine, and stator, and the rotation of the engine 1 is transmitted to the transmission 3 via the torque converter 2.
- the transmission 3 has a hydraulic clutch that changes the speed stage from the first speed to the fourth speed, and the rotation of the output shaft of the torque converter 2 is changed by the transmission 3.
- the rotation after the shift is transmitted to the tires 113 and 123 via the propeller shaft 4 and the axle 5, and the wheel loader 100 travels.
- the engine speed of the engine 1 is detected by an engine speed sensor 25.
- the working hydraulic pump 6 is driven by the engine 1, and the oil discharged from the hydraulic pump 6 is guided to the working actuator 8 (for example, the arm cylinder 114) via the direction control valve 7.
- the direction control valve 7 is driven by the operation of the operation lever 9 and can drive the actuator 8 in accordance with the operation amount of the operation lever 9.
- the height of the bucket 112 is calculated by the controller 10 based on a detection value of a sensor (bucket height detection sensor) 26 for detecting the bucket height.
- the bucket height detection sensor 26 is, for example, a sensor that detects the angle of the arm 111 with respect to the front vehicle body 110 and a sensor that detects the angle of the bucket 112 with respect to the arm 111. That is, the height of the bucket 112 is calculated by the controller 10 based on the detection values of these sensors and information such as the length and shape of the arm 111 and the mounting position stored in advance.
- the torque converter 2 has a function of increasing the output torque with respect to the input torque, that is, a function of setting the torque ratio to 1 or more.
- Nt / Ni the ratio between the rotational speed Ni of the input shaft of the torque converter 2 and the rotational speed Nt of the output shaft
- the transmission 3 is an automatic transmission having a solenoid valve corresponding to each speed stage. These solenoid valves are driven by a control signal output from the controller 10 to the transmission control device 20, whereby the speed stage is automatically changed between the first speed to the fourth speed.
- the speed stage of the transmission 3 is provided from 1st speed stage to 4th speed stage, for example.
- torque converter speed ratio reference control that shifts when the torque converter speed ratio e reaches a predetermined value
- vehicle speed reference control that shifts when the vehicle speed reaches a predetermined value.
- the speed stage of the transmission 3 is controlled by vehicle speed reference control.
- FIG. 3 is a diagram showing the relationship between the vehicle speed v and the speed stage.
- the controller 10 outputs a control signal to the transmission control device 20 according to the vehicle speed v, and shifts the transmission 3 according to the vehicle speed v as shown in FIG.
- the vehicle speed v increases to the shift permission vehicle speed v12
- the first speed is shifted up to the second speed
- the second speed is shifted up to the third speed.
- Increases from the shift permission vehicle speed v23 to the shift permission vehicle speed v34 the gear shifts from the third speed to the fourth speed.
- the shift permission vehicle speeds v12, v23, and v34 are set larger than the shift permission vehicle speeds v21, v32, and v43, respectively, so that the shift change can be performed stably.
- Each of these shift permission vehicle speeds is a threshold value for permitting upshifting or downshifting, and is set in the controller 10 in advance.
- the transmission control device 20 is configured by a solenoid valve corresponding to each speed stage, and is driven by a control signal from the controller 10.
- the controller 10 decreases each shift permission vehicle speed if the engine 1 has a low rotation speed, and increases each shift permission vehicle speed if the engine 1 has a high rotation speed. In this way, the controller 10 changes each shift-permitted vehicle speed according to the number of revolutions of the engine 1, which is effective in reducing fuel consumption.
- FIG. 4 is a diagram showing the running performance of the wheel loader 100 of the present embodiment.
- FIG. 4 shows only the shift-permitted vehicle speed at the time of shift-up (shift-up permitted vehicle speed), but the same applies to the shift-permitted vehicle speed at the time of shift-down (shift-down permitted vehicle speed).
- Intersection points x1, x2, and x3 of the curves indicating the traveling performance at each speed stage move as indicated by arrows a1, a2, and a3 when the rotational speed of the engine 1 decreases.
- Each shift-permitted vehicle speed is generally set at the intersection points x1, x2, and x3.
- vehicle speed ranges indicated by A, B, and C indicate ranges in which the shift-permitted vehicle speeds v12, v23, and v34 change according to the number of revolutions of the engine 1, respectively.
- the shift-permitted vehicle speed (first shift-up permitted vehicle speed) V23 shown in FIG. 4 is set to the shift-permitted vehicle speed (second shift-up permitted vehicle speed) regardless of the engine speed. ) As shown in V23a, it is raised (pulled up) so that it is difficult to shift up from the second speed to the third speed.
- the second shift-up permission vehicle speed v23a is set to be, for example, about 10% higher than the maximum value of the first shift-up permission vehicle speed v23 that changes according to the rotational speed of the engine 1. .
- the controller 10 shown in FIG. 2 includes an arithmetic processing unit having a CPU, ROM, RAM, and other peripheral circuits.
- the controller 10 includes a pedal operation amount detector 12 that detects an operation amount of the accelerator pedal 11, a rotation number detector 13 that detects a rotation number Ni of an input shaft (not shown) of the torque converter 2, and a torque converter 2 failure.
- a rotational speed detector 14 that detects the rotational speed Nt of the output shaft shown in the figure and a vehicle speed detector 15 that detects the rotational speed of the output shaft of the transmission 3, that is, the vehicle speed v, are connected.
- the controller 10 includes a forward / reverse changeover switch 17 for instructing forward / reverse travel of the vehicle, a shift switch 18 for instructing a maximum speed stage between the first speed to the fourth speed, the engine speed sensor 25 and the bucket height detection described above.
- the sensor 26 is connected to a manual / automatic transmission means switching device 27 for switching whether the transmission 3 is automatically or manually shifted.
- the controller 10 is connected with an upshift control switching selection device 28.
- the shift-up control switching selection device 28 is a normal control that shifts up from the second speed to the third speed when the automatic speed change is selected by the manual / automatic transmission means switching device 27 and the vehicle speed v exceeds the shift permission vehicle speed. And delay control that delays the timing of upshifting relative to normal control.
- the controller 10 controls the rotation speed (the number of rotations) of the engine 1 according to the operation amount of the accelerator pedal 11. In addition, the controller 10 changes each shift permission vehicle speed according to the rotational speed of the engine 1 detected by the engine rotational speed sensor 25 as described above, and when the delay control is selected by the upshift control switching selection device 28. The delay control is performed so as to delay the timing of the upshift from the second speed to the third speed.
- the controller 10 also includes a timer (not shown) that measures the shift-up delay time in the delay control.
- FIG. 5 is a diagram showing V-shape loading, which is one of the methods for loading earth and sand into a dump truck.
- V shape loading first, the wheel loader 100 is moved forward as shown by an arrow a to scoop soil and the like, and then the wheel loader 100 is once moved backward as shown by an arrow b. Then, the wheel loader 100 is advanced toward the dump truck as indicated by an arrow c, and the scooped earth and sand is loaded on the dump truck, and the wheel loader 100 is moved back to the original position as indicated by an arrow d. .
- the excavation work is usually performed at the first speed or the second speed, and therefore, the reverse movement has started.
- the speed stage at the time (start) is 1st speed or 2nd speed. If the amount of depression of the accelerator pedal 11 is small and the speed of the engine 1 is low, the shift permission vehicle speed V23 decreases as described above. For this reason, the gear shifts from the second speed to the third speed immediately after the start of reverse travel.
- the wheel loader 100 decelerates while moving backward, so that the flow toward the rear of the vehicle becomes large and the vehicle cannot immediately shift to forward traveling.
- the work efficiency will be reduced.
- the driving force is small, and the flow toward the rear of the vehicle becomes large.
- the flow of the vehicle means that, for example, in a state where the vehicle speed is increased by shifting up to the third speed, the braking distance until the vehicle switches from reverse to forward becomes longer, and the vehicle continues to move backward than the operator intended.
- the wheel loader 100 when switching to forward travel and loading sand or the like on the dump truck (arrow c in FIG. 5), the wheel loader 100 is moved forward toward the dump truck while raising the bucket 112. ing.
- the speed stage when starting to advance toward the dump truck (at the start) is the first speed or the second speed. If the amount of depression of the accelerator pedal 11 is small and the rotational speed of the engine 1 is low, the shift permission vehicle speed v23 decreases as described above. Therefore, the vehicle speed reaches the shift permission vehicle speed v23 before the bucket 112 is raised to the height required for loading on the dump truck, and the speed is shifted up from the second speed to the third speed.
- the wheel loader 100 may reach the dump truck before the bucket 112 is raised to a height necessary for loading on the dump truck. In this case, the operator of the wheel loader 100 must apply a brake to stop the wheel loader 100 and raise the bucket 112. Therefore, not only the work efficiency is lowered, but also the operator of the wheel loader 100 feels bothersome.
- a transmission configured to maintain the speed stage at a time when the height of the bucket 112 is equal to or higher than a set height.
- the vehicle speed reaches the shift permission vehicle speed v23 before the bucket 112 reaches the set height, and the second speed to the third speed. If it is shifted up, the above-mentioned problems cannot be solved. Further, if the set height is lowered, another problem of being held at a speed stage different from the operator's intention at the time of excavation work or high-speed running where the bucket 112 is at a low height position is caused. .
- the timing of the upshift from the second speed to the third speed is delayed as compared with the conventional wheel loader to suppress undesired vehicle flow and speed increase.
- the delay control is selected by the upshift control switching selection device 28
- the upshift from the second speed to the third speed is performed based on the traveling direction of the vehicle and the height of the bucket 112 that is the work equipment device. Set the vehicle speed to allow upshifting.
- the maximum speed stage is set to the third speed by the shift switch 18 will be described in detail.
- (1) Delay control during reverse travel When excavating earth and sand as shown by the arrow b and then traveling backward, the upshift from the second speed to the third speed is permitted regardless of the height of the bucket 112.
- the shift permission vehicle speed is set to the second shift-up permission vehicle speed V23a.
- the second shift-up permission vehicle speed V23a is set to a value larger than the first shift-up permission vehicle speed V23.
- the controller 10 permits the shift-up from the second speed to the third speed when the vehicle speed equal to or higher than the second shift-up permission vehicle speed V23a continues for the reverse set time Tr or more.
- the reverse set time Tr is set to an appropriate value in advance so that, for example, when shifting backward in V shape loading, it is difficult for the shift to the third speed to occur. For example, the reverse travel time Tr is set to 5 seconds.
- the vehicle speed may be equal to or higher than the second shift-up permission vehicle speed V23a.
- the reverse travel time is usually about 3 to 4 seconds, so by setting the reverse set time Tr to 5 seconds, for example, in most cases, it is not shifted up to the 3rd speed during reverse travel. You can drive in 2nd speed.
- the vehicle loader When the operator depresses the accelerator pedal 11 about half (with a half accelerator) and travels backward, the vehicle loader normally travels at the second speed because the vehicle speed does not increase to the second shift-up permitted vehicle speed V23a. This reduces the vehicle flow when switching from reverse travel to forward travel. In addition, since the vehicle starts at the first speed or the second speed after switching to forward travel, acceleration is good and work time (cycle time) can be shortened.
- the set value of the height of the bucket 112 is set to, for example, an intermediate position between the height of the bucket 112 in the transporting posture and the height of the bucket 112 at the maximum reach when the arm 111 is substantially horizontal.
- the height of the bucket 112 in the transporting posture is the height of the bucket 112 when the lower end (lower surface) of the bucket 112 is positioned near the ground minimum height of the wheel loader 100.
- the state where the arm 111 is substantially horizontal is a state where the swing center of the proximal end of the arm 111 and the swing center of the bucket 112 at the distal end are substantially horizontal.
- the vehicle speed permitting the shift-up from the second speed to the third speed is changed from the first shift-up permission vehicle speed V23 to the second shift-up permission.
- the vehicle speed is increased to V23a.
- the vehicle speed may become the second shift-up permitted vehicle speed V23a or more, but from the second speed until the forward set time Tf elapses. There is no upshifting to 3rd gear.
- the time for traveling forward while holding the bucket 112 at a height equal to or higher than the set value for loading work on the dump truck is usually 2 to 3 seconds. Therefore, by setting the forward set time Tf to, for example, 4 seconds, in most cases, it is possible to approach the dump truck without shifting up to the third speed.
- FIG. 8 shows a flowchart of a processing procedure in the case of performing the shift-up delay control from the second speed to the third speed in the present embodiment.
- the flowchart of FIG. 8 shows the flow of control when the wheel loader shifts up from the second speed to the third speed especially when the maximum speed stage is set to the third speed by the shift switch 18.
- the processing in FIG. 8 is started when the delay control is selected by the upshift control switching selection device 28 and is repeatedly executed by the controller 10.
- step S1 the vehicle speed detector 15 detects the vehicle speed v.
- step S2 it is determined whether forward traveling is selected by the forward / reverse selector switch 17 or not. When the forward travel is selected, the process proceeds to step S3, and the height of the bucket 112 is calculated based on the detection value of the bucket height detection sensor 26.
- step S4 it is determined whether or not the height of the bucket 112 calculated in step S3 exceeds a set value. If a positive determination is made in step S4, the process proceeds to step 5.
- step S5 it is determined whether or not the vehicle speed v detected in step S1 is equal to or higher than the second shift-up permission vehicle speed V23a.
- step S5 If an affirmative determination is made in step S5, the process proceeds to step S6, in which it is determined whether or not the vehicle speed equal to or higher than the second shift-up permission vehicle speed V23a continues for the forward set time Tf or more. If an affirmative determination is made in step S6, the process proceeds to step S7, and a shift up from the second speed to the third speed is performed. On the other hand, if a negative determination is made in step S5 or S6, the process of FIG. 8 is repeated without shifting up from the second speed to the third speed. If a negative determination is made in step S5, the controller 10 resets a timer (not shown) that measures an elapsed time after the vehicle speed v becomes equal to or higher than the second shift-up permission vehicle speed V23a.
- step S8 it is determined whether or not the vehicle speed v is equal to or higher than the first shift-up permission vehicle speed V23. If an affirmative determination is made in step S8, the process proceeds to step S7, and a shift up from the second speed to the third speed is performed. If a negative determination is made in step S8, the upshift from the second speed to the third speed is not performed, and the process of FIG. 8 is repeated.
- step S9 it is determined whether or not the vehicle speed v is equal to or higher than the second shift-up permission vehicle speed V23a. If an affirmative determination is made in step S9, the process proceeds to step S10, in which it is determined whether or not the vehicle speed equal to or higher than the second shift-up permission vehicle speed V23a continues for the reverse set time Tr or more. If an affirmative determination is made in step S10, the process proceeds to step S7, and a shift up from the second speed to the third speed is performed.
- step S9 or S10 the upshift from the second speed to the third speed is not performed, and the process of FIG. 8 is repeated. If a negative determination is made in step S9, the controller 10 resets a timer (not shown) that measures an elapsed time after the vehicle speed v becomes equal to or higher than the second shift-up permission vehicle speed V23a.
- the controller 10 of the wheel loader 100 performs automatic shift control by vehicle speed reference control that permits shift-up when the vehicle speed v is equal to or higher than the shift-up permitted vehicle speed.
- the shift-up control switching selection device 28 is provided, and the normal control for performing the shift-up when the vehicle speed v is equal to or higher than the shift-up permitted vehicle speed, and the delay control for delaying the shift-up timing with respect to the normal control. And can be switched.
- the operator of the wheel loader 100 can arbitrarily switch and select the automatic shift control between the normal control and the delay control according to the work contents and preferences of the wheel loader 100.
- the delay control it is possible to suppress, for example, a shift-up that is contrary to the operator's intention due to a decrease in the shift permission speed in V-shape loading, and an increase in the speed of the wheel loader 100 due to this shift-up. Therefore, it is possible to prevent a problem that the wheel loader 100 reaches the dump truck before the bucket 112 rises to a height necessary for loading into the dump truck, and it is possible to prevent a reduction in work efficiency.
- the speed stage of the transmission 3 is configured to be 3rd speed or higher.
- the controller 10 determines that the height position of the bucket 112 (work machine device) is higher than the set value. When it is low, the shift-up permission vehicle speed is set to the first shift-up permission vehicle speed V23, and when the height position of the bucket 112 is equal to or higher than the set value, the shift-up permission vehicle speed is set higher than the first shift-up permission vehicle speed V23. A large second shift-up permission vehicle speed V23a is set.
- the speed stage of the transmission 3 is shifted up from the second speed to the third speed when the vehicle speed v continues the second shift-up permission vehicle speed V23a or higher for the forward set time Tf. .
- the delay control is selected and the wheel loader 100 travels forward, the shift from the second speed to the third speed is less likely to occur when the height of the bucket 112 exceeds a set value.
- the shift-up contrary to the operator's intention can be effectively suppressed during the second speed traveling frequently used when approaching the dump truck of V-shape loading, so that the above-described problems can be effectively prevented.
- the controller 10 determines whether or not the shift up permission vehicle speed regardless of the height of the bucket 112. Is set to a second shift-up permission vehicle speed V23a that is greater than the first shift-up permission vehicle speed V23, and the vehicle speed v continues beyond the second shift-up permission vehicle speed V23a for the reverse set time Tr, the speed stage of the transmission 3 is changed from the second speed. Shift up to 3rd gear. As a result, for example, when moving backward after excavation in V-shape loading, it is difficult to shift up from the second speed to the third speed.
- the flow of the vehicle when switching from reverse to forward is reduced, and acceleration can be performed at the second speed (or first speed) after forward switching, and the work time can be shortened and the work can be performed efficiently.
- the upshift permission vehicle speed is set to the first upshift permission vehicle speed V23 regardless of the height of the bucket 112 and the setting of the forward / reverse switching switch 17.
- the speed stage of the transmission 3 is shifted up from the second speed to the third speed.
- the vehicle speed v In order to shift up to the third speed when the delay control is selected, the vehicle speed v must continue at the second shift up permission vehicle speed V23 or higher for the set time Tf or Tr, and the vehicle is driven in a state close to full accelerator. Need to continue. Therefore, when the travel distance is long, selecting normal control is effective from the viewpoint of low fuel consumption driving.
- the delay control for shifting up from the second speed to the third speed has been described, but the present invention is not limited to this.
- the upshift from the first speed to the second speed may be delayed, or the upshift from the third speed to the fourth speed may be delayed. That is, in reverse travel and forward travel as shown in FIGS. 7 (a) and 7 (b), the upshift from the low speed stage to the next higher speed stage is performed so that the shift up against the operator's intention can be suppressed.
- the number of speed stages that can be selected in the transmission 3 is not limited to four, and may be three or five or more.
- the wheel loader 100 has been described as an example of a work vehicle including the controller 10 that constitutes the speed change control device.
- the present invention is not limited to this, and for example, a forklift, a telehandler, a lift It may be another work vehicle such as a truck.
- the second shift-up permission vehicle speed v23a is, for example, about 10% higher than the maximum value of the first shift-up permission vehicle speed v23 that changes according to the rotational speed of the engine 1.
- the present invention is not limited to this.
- the second shift-up permission vehicle speed v23a is set to approximately the middle between the maximum value of the first shift-up permission vehicle speed v23 that changes according to the rotation speed of the engine 1 and the maximum vehicle speed V2 (see FIG. 4) in the second speed. It may be set.
- the above-described embodiments and modifications may be combined. This application is based on Japanese Patent Application No. 2009-283139 (filed on Dec. 14, 2009), the contents of which are incorporated herein by reference.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Control Of Transmission Device (AREA)
- Operation Control Of Excavators (AREA)
Abstract
Description
本発明の第2の態様は、第1の態様による作業車両の変速制御装置において、トランスミッションの速度段は3速以上であり、シフトアップ制御切替選択装置によって遅延制御が選択されている場合、前後進切換装置によって前進走行が選択されると、変速制御装置は、高さ位置検出装置によって検出される作業機装置の高さ位置が設定値より低い場合には、シフトアップ許可車速を第1シフトアップ許可車速に設定し、作業機装置の高さ位置が設定値以上の場合には、シフトアップ許可車速を第1シフトアップ許可車速よりも大きい第2シフトアップ許可車速に設定し、変速制御装置は、作業機装置の高さ位置が設定値以上の場合は、車速が第2シフトアップ許可車速以上を前進設定時間継続すると、トランスミッションの速度段を2速から3速へシフトアップするように変速装置を制御することが好ましい。
本発明の第3の態様は、第1または第2の態様による作業車両の変速制御装置において、トランスミッションの速度段は3速以上であり、シフトアップ制御切替選択装置によって遅延制御が選択されている場合、前後進切換装置によって後進走行が選択されると、変速制御装置は、作業機装置の高さに拘わらずシフトアップ許可車速を第1シフトアップ許可車速よりも大きい第2シフトアップ許可車速に設定し、車速が第2シフトアップ許可車速以上を後進設定時間継続すると、トランスミッションの速度段を2速から3速へシフトアップするように変速装置を制御することが好ましい。
本発明の第4の態様は、第1から第3の態様による作業車両の変速制御装置において、トランスミッションの速度段は3速以上であり、シフトアップ制御切替選択装置によって通常制御が選択されている場合、作業機装置の高さ、および前後進切換装置の設定に拘わらず、シフトアップ許可車速を第1シフトアップ許可車速に設定し、車速が第1シフトアップ許可車速以上となると、トランスミッションの速度段を2速から3速へシフトアップするように変速装置を制御することが好ましい。
本発明の第5の態様によるホイールローダは、第1から第4の態様による変速制御装置を備える。
矢印bに示すように土砂等を掘削した後、後進走行する場合には、バケット112の高さに関係なく、2速から3速へのシフトアップを許可する変速許可車速を第2シフトアップ許可車速V23aに設定する。上述したように、第2シフトアップ許可車速V23aは、第1シフトアップ許可車速V23よりも大きい値に設定されている。コントローラ10は、第2シフトアップ許可車速V23a以上の車速が後進設定時間Tr以上継続した場合に、2速から3速へのシフトアップを許可する。後進設定時間Trは、例えばVシェープローディングにおいて後進する際に、3速へのシフトアップが起こりにくくなるように、予め適切な値を設定しておく。例えば、後進設定時間Tr=5秒とする。
矢印cに示すように前進走行する場合には、バケット112の高さが設定値よりも低い場合に2速から3速へのシフトアップを許可する第1シフトアップ許可車速V23と、バケット112の高さが設定値以上の場合に2速から3速へのシフトアップを許可する第2シフトアップ許可車速V23aとを設定する。
シフトアップ制御切替選択装置28によって通常制御が選択されると、車両の進行方向、およびバケット112の高さにかかわりなく、2速から3速へのシフトアップを許可する変速許可車速を、第1シフトアップ許可車速V23に設定する。これにより、前進走行および後進走行ともに、車速が第1シフトアップ許可車速V23以上となると、遅延時間(前進設定時間Tf,後進設定時間Tr)を設けることなく、速やかに2速から3速にシフトアップする。例えば走行距離が長い場合などは、3速を選択することでエンジン回転速度を抑えて低燃費で走行することが可能となる。
(1)ホイールローダ100のコントローラ10は、車速vがシフトアップ許可車速以上となるとシフトアップを許可する車速基準制御により自動変速制御を行う。上述した一実施の形態では、シフトアップ制御切替選択装置28を備え、車速vがシフトアップ許可車速以上となるとシフトアップを行う通常制御と、通常制御に対してシフトアップのタイミングを遅延させる遅延制御とを切り換えることが可能である。これにより、ホイールローダ100のオペレータは、ホイールローダ100による作業内容や好みに応じて、自動変速制御を通常制御と遅延制御との間で任意に切替選択することができる。遅延制御を選択することによって、たとえば、Vシェープローディングにおいて変速許可速度の低下によるオペレータの意図に反するシフトアップ、およびこのシフトアップに起因するホイールローダ100の増速を抑制できる。したがって、ダンプトラックへの積み込みに必要な高さまでバケット112が上昇する前にホイールローダ100がダンプトラックに到達してしまう、という不具合を防止して、作業効率の低下を防止できる。
(2)トランスミッション3の速度段は、3速以上に構成されている。シフトアップ制御切替選択装置28によって遅延制御が選択されている場合、前後進切換スイッチ17によって前進走行が選択されると、コントローラ10は、バケット112(作業機装置)の高さ位置が設定値より低い場合には、シフトアップ許可車速を第1シフトアップ許可車速V23に設定し、バケット112の高さ位置が設定値以上の場合には、シフトアップ許可車速を第1シフトアップ許可車速V23よりも大きい第2シフトアップ許可車速V23aに設定する。そして、バケット112の高さ位置が設定値以上の場合は、車速vが第2シフトアップ許可車速V23a以上を前進設定時間Tf継続すると、トランスミッション3の速度段を2速から3速へシフトアップする。遅延制御が選択され、ホイールローダ100が前進走行する場合は、バケット112の高さが設定値以上となると、2速から3速へのシフトアップが起こり難くなるように構成した。これにより、たとえば、Vシェープローディングのダンプトラックへの接近時に多用する2速走行時にオペレータの意図に反するシフトアップを効果的に抑制できるので、上述した不具合を効果的に防止できる。
(3)シフトアップ制御切替選択装置28によって遅延制御が選択されている場合、前後進切換スイッチ17によって後進走行が選択されると、コントローラ10は、バケット112の高さに拘わらずシフトアップ許可車速を第1シフトアップ許可車速V23よりも大きい第2シフトアップ許可車速V23aに設定し、車速vが第2シフトアップ許可車速V23a以上を後進設定時間Tr継続すると、トランスミッション3の速度段を2速から3速へシフトアップする。これにより、たとえばVシェープローディングにおいて掘削後に後進する場合に、2速から3速へのシフトアップが起こり難くなる。したがって、後進から前進に切り換えたときの車両流れが少なくなるとともに、前進切換後に2速(または1速)で加速することができ、作業時間を短縮して効率的に作業を行うことができる。
(4)シフトアップ制御切替選択装置28によって通常制御が選択されている場合、バケット112の高さ、および前後進切換スイッチ17の設定に拘わらず、シフトアップ許可車速を第1シフトアップ許可車速V23に設定し、車速vが第1シフトアップ許可車速V23以上となると、トランスミッション3の速度段を2速から3速へシフトアップする。遅延制御を選択した場合に3速へのシフトアップを行うためには、車速vが第2シフトアップ許可車速V23以上を設定時間TfまたはTr継続する必要があり、フルアクセルに近い状態で運転し続ける必要がある。したがって、走行距離が長い場合は通常制御を選択することが低燃費運転の観点からは効果的である。
(1)上述の説明では、2速から3速へのシフトアップの遅延制御について説明したが、本発明はこれには限定されない。例えば、1速から2速へのシフトアップを遅延するように構成してもよいし、3速から4速へのシフトアップを遅延するように構成してもよい。すなわち、図7(a)(b)に示すような後進走行時および前進走行時において、オペレータの意図に反するシフトアップを抑制できるように、低速度段から1つ上の速度段へのシフトアップを遅延するように構成することができる。また、トランスミッション3における選択可能な速度段の段数は4段には限定されず、3段でも、5段以上であってもよい。
(4)上述した実施の形態および各変形例は、それぞれ組み合わせてもよい。
本出願は日本国特許出願2009-283139号(2009年12月14日出願)を基礎として、その内容は引用文としてここに組み込まれる。
Claims (5)
- 作業車両の車速を検出する車速検出装置と、
トランスミッションの速度段をシフトアップおよびシフトダウンする変速装置と、
前記車速検出装置で検出された車速がシフトアップ許可車速以上となると、前記変速装置によるシフトアップを許可する変速制御装置と、
作業機装置の高さ位置を検出する高さ位置検出装置と、
前記作業車両の前進走行と後進走行とを切り換える前後進切換装置と、
前記車速が前記シフトアップ許可車速以上となると前記変速装置によるシフトアップを行う通常制御と、前記通常制御に対してシフトアップのタイミングを遅延させる遅延制御とを切り換えるシフトアップ制御切替選択装置とを備える作業車両の変速制御装置。 - 請求項1に記載の作業車両の変速制御装置において、
前記トランスミッションの速度段は3速以上であり、
前記シフトアップ制御切替選択装置によって前記遅延制御が選択されている場合、前記前後進切換装置によって前進走行が選択されると、
前記変速制御装置は、前記高さ位置検出装置によって検出される前記作業機装置の高さ位置が設定値より低い場合には、前記シフトアップ許可車速を第1シフトアップ許可車速に設定し、前記作業機装置の高さ位置が前記設定値以上の場合には、前記シフトアップ許可車速を前記第1シフトアップ許可車速よりも大きい第2シフトアップ許可車速に設定し、
前記変速制御装置は、前記作業機装置の高さ位置が前記設定値以上の場合は、前記車速が前記第2シフトアップ許可車速以上を前進設定時間継続すると、前記トランスミッションの速度段を2速から3速へシフトアップするように前記変速装置を制御する作業車両の変速制御装置。 - 請求項1または請求項2に記載の作業車両の変速制御装置において、
前記トランスミッションの速度段は3速以上であり、
前記シフトアップ制御切替選択装置によって前記遅延制御が選択されている場合、前記前後進切換装置によって後進走行が選択されると、
前記変速制御装置は、前記作業機装置の高さに拘わらず前記シフトアップ許可車速を第1シフトアップ許可車速よりも大きい第2シフトアップ許可車速に設定し、前記車速が前記第2シフトアップ許可車速以上を後進設定時間継続すると、前記トランスミッションの速度段を2速から3速へシフトアップするように前記変速装置を制御する作業車両の変速制御装置。 - 請求項1から請求項3のいずれか1項に記載の作業車両の変速制御装置において、
前記トランスミッションの速度段は3速以上であり、
前記シフトアップ制御切替選択装置によって前記通常制御が選択されている場合、前記作業機装置の高さ、および前記前後進切換装置の設定に拘わらず、前記シフトアップ許可車速を第1シフトアップ許可車速に設定し、前記車速が前記第1シフトアップ許可車速以上となると、前記トランスミッションの速度段を2速から3速へシフトアップするように前記変速装置を制御する作業車両の変速制御装置。 - 請求項1から請求項4のいずれか1項に記載の変速制御装置を備えるホイールローダ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP10837609.6A EP2515006B1 (en) | 2009-12-14 | 2010-12-14 | Gear shifting control device for operation vehicle |
| US13/516,098 US8775034B2 (en) | 2009-12-14 | 2010-12-14 | Shift control system for industrial vehicle |
| IN5236DEN2012 IN2012DN05236A (ja) | 2009-12-14 | 2010-12-14 | |
| CN201080057055.6A CN102656390B (zh) | 2009-12-14 | 2010-12-14 | 作业车辆的变速控制装置及轮式装载机 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009283139A JP5503955B2 (ja) | 2009-12-14 | 2009-12-14 | 作業車両の変速制御装置 |
| JP2009-283139 | 2009-12-14 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2011074583A1 true WO2011074583A1 (ja) | 2011-06-23 |
Family
ID=44167335
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2010/072498 WO2011074583A1 (ja) | 2009-12-14 | 2010-12-14 | 作業車両の変速制御装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8775034B2 (ja) |
| EP (1) | EP2515006B1 (ja) |
| JP (1) | JP5503955B2 (ja) |
| KR (1) | KR20120117777A (ja) |
| CN (1) | CN102656390B (ja) |
| IN (1) | IN2012DN05236A (ja) |
| WO (1) | WO2011074583A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013094283A1 (ja) * | 2011-12-19 | 2013-06-27 | 日立建機株式会社 | 作業車両 |
| WO2015083753A1 (ja) * | 2013-12-03 | 2015-06-11 | 株式会社小松製作所 | 作業車両 |
| JP2018031459A (ja) * | 2016-08-26 | 2018-03-01 | 株式会社小松製作所 | ホイールローダおよびホイールローダの制御方法 |
| JP2019190237A (ja) * | 2018-04-27 | 2019-10-31 | 株式会社小松製作所 | 積込機械の制御装置及び積込機械の制御方法 |
| WO2019207982A1 (ja) * | 2018-04-27 | 2019-10-31 | 株式会社小松製作所 | 積込機械の制御装置及び積込機械の制御方法 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102012220109A1 (de) * | 2012-11-05 | 2014-05-08 | Deere & Company | Einrichtung zur Erfassung des Betriebszustands einer Arbeitsmaschine |
| JP6265725B2 (ja) * | 2013-12-16 | 2018-01-24 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
| CN105064445B (zh) * | 2015-07-27 | 2017-10-31 | 徐工集团工程机械股份有限公司科技分公司 | 一种装载机用多功能手柄操纵控制系统 |
| US10018267B2 (en) * | 2016-03-11 | 2018-07-10 | Ford Global Technologies, Llc | Vehicle transmission control module reset detection and mitigation |
| JP6823500B2 (ja) * | 2017-03-03 | 2021-02-03 | 株式会社小松製作所 | 作業車両および制御方法 |
| US10549970B2 (en) | 2017-08-02 | 2020-02-04 | Jlg Industries, Inc. | Telehandler with cantilever boom mounting |
| CN108104191B (zh) * | 2017-12-21 | 2020-07-21 | 柳州柳工挖掘机有限公司 | 挖掘机工作挡位智能控制方法 |
| JP6971888B2 (ja) * | 2018-03-05 | 2021-11-24 | 株式会社小松製作所 | 作業車両、作業車両を含むシステムおよび作業車両の積載重量算出方法 |
| WO2019180843A1 (ja) * | 2018-03-20 | 2019-09-26 | 日立建機株式会社 | 作業車両 |
| JP7173898B2 (ja) * | 2019-02-28 | 2022-11-16 | 日立建機株式会社 | 作業機械 |
| DE102019206658A1 (de) * | 2019-05-09 | 2020-11-12 | Zf Friedrichshafen Ag | Verfahren und Vorrichtung zur Getriebesteuerung einer Arbeitsmaschine |
| JP7398637B2 (ja) * | 2020-05-28 | 2023-12-15 | パナソニックIpマネジメント株式会社 | 表示制御装置、車両及び表示制御方法 |
| JP2024073225A (ja) * | 2022-11-17 | 2024-05-29 | 株式会社クボタ | 作業車 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63265730A (ja) * | 1987-04-22 | 1988-11-02 | Komatsu Ltd | ホイ−ルロ−ダの自動変速装置 |
| JP3344491B2 (ja) | 1992-10-20 | 2002-11-11 | 古河機械金属株式会社 | ホィールローダの自動変速制御装置 |
| WO2008066169A1 (fr) * | 2006-11-30 | 2008-06-05 | Tcm Corporation | Dispositif de commande de passage de vitesse pour véhicule industriel |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU611447B2 (en) * | 1988-05-24 | 1991-06-13 | Kabushiki Kaisha Komatsu Seisakusho | Automatic transmission for wheel loader |
| JP2858348B2 (ja) * | 1990-04-10 | 1999-02-17 | アイシン精機株式会社 | 自動変速機の油圧制御装置 |
| US5106348A (en) * | 1991-05-08 | 1992-04-21 | Koivunen Erkki A | Bi-directional multi-mode clutch for change-speed transmission unit for automatic change speed transmissions |
| JP4574620B2 (ja) * | 2004-07-28 | 2010-11-04 | 株式会社小松製作所 | 車両の変速制御装置および変速制御方法 |
| JP4769265B2 (ja) * | 2008-03-31 | 2011-09-07 | 株式会社クボタ | 作業車の作業条件表示構造 |
| US8771144B2 (en) * | 2008-07-21 | 2014-07-08 | Honda Motor Co., Ltd. | Manual downshift control method for automatic transmission |
| JP5215204B2 (ja) * | 2009-01-29 | 2013-06-19 | 株式会社クボタ | 作業機の表示構造 |
-
2009
- 2009-12-14 JP JP2009283139A patent/JP5503955B2/ja active Active
-
2010
- 2010-12-14 IN IN5236DEN2012 patent/IN2012DN05236A/en unknown
- 2010-12-14 EP EP10837609.6A patent/EP2515006B1/en active Active
- 2010-12-14 WO PCT/JP2010/072498 patent/WO2011074583A1/ja active Application Filing
- 2010-12-14 US US13/516,098 patent/US8775034B2/en active Active
- 2010-12-14 KR KR1020127015282A patent/KR20120117777A/ko not_active Application Discontinuation
- 2010-12-14 CN CN201080057055.6A patent/CN102656390B/zh not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63265730A (ja) * | 1987-04-22 | 1988-11-02 | Komatsu Ltd | ホイ−ルロ−ダの自動変速装置 |
| JP3344491B2 (ja) | 1992-10-20 | 2002-11-11 | 古河機械金属株式会社 | ホィールローダの自動変速制御装置 |
| WO2008066169A1 (fr) * | 2006-11-30 | 2008-06-05 | Tcm Corporation | Dispositif de commande de passage de vitesse pour véhicule industriel |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2515006A4 |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013094283A1 (ja) * | 2011-12-19 | 2013-06-27 | 日立建機株式会社 | 作業車両 |
| JP2013127187A (ja) * | 2011-12-19 | 2013-06-27 | Hitachi Constr Mach Co Ltd | 作業車両 |
| US10704223B2 (en) | 2011-12-19 | 2020-07-07 | Hitachi Construction Machinery Co., Ltd. | Work vehicle |
| US9650760B2 (en) | 2013-12-03 | 2017-05-16 | Komatsu Ltd. | Work vehicle |
| JPWO2015083753A1 (ja) * | 2013-12-03 | 2017-03-16 | 株式会社小松製作所 | 作業車両 |
| WO2015083753A1 (ja) * | 2013-12-03 | 2015-06-11 | 株式会社小松製作所 | 作業車両 |
| JP2018031459A (ja) * | 2016-08-26 | 2018-03-01 | 株式会社小松製作所 | ホイールローダおよびホイールローダの制御方法 |
| WO2018037936A1 (ja) * | 2016-08-26 | 2018-03-01 | 株式会社小松製作所 | ホイールローダおよびホイールローダの制御方法 |
| CN108779845A (zh) * | 2016-08-26 | 2018-11-09 | 株式会社小松制作所 | 轮式装载机以及轮式装载机的控制方法 |
| US11293164B2 (en) | 2016-08-26 | 2022-04-05 | Komatsu Ltd. | Wheel loader and method for controlling wheel loader |
| WO2019207982A1 (ja) * | 2018-04-27 | 2019-10-31 | 株式会社小松製作所 | 積込機械の制御装置及び積込機械の制御方法 |
| JP2019190238A (ja) * | 2018-04-27 | 2019-10-31 | 株式会社小松製作所 | 積込機械の制御装置及び積込機械の制御方法 |
| WO2019207981A1 (ja) * | 2018-04-27 | 2019-10-31 | 株式会社小松製作所 | 積込機械の制御装置及び積込機械の制御方法 |
| JP6995687B2 (ja) | 2018-04-27 | 2022-01-17 | 株式会社小松製作所 | 積込機械の制御装置及び積込機械の制御方法 |
| JP2019190237A (ja) * | 2018-04-27 | 2019-10-31 | 株式会社小松製作所 | 積込機械の制御装置及び積込機械の制御方法 |
| JP7121532B2 (ja) | 2018-04-27 | 2022-08-18 | 株式会社小松製作所 | 積込機械の制御装置及び積込機械の制御方法 |
| US11821168B2 (en) | 2018-04-27 | 2023-11-21 | Komatsu Ltd. | Control device for loading machine and control method for loading machine |
| US11885096B2 (en) | 2018-04-27 | 2024-01-30 | Komatsu Ltd. | Loading machine control device and loading machine control method |
Also Published As
| Publication number | Publication date |
|---|---|
| IN2012DN05236A (ja) | 2015-10-23 |
| EP2515006A4 (en) | 2016-05-18 |
| JP5503955B2 (ja) | 2014-05-28 |
| US8775034B2 (en) | 2014-07-08 |
| EP2515006B1 (en) | 2017-08-16 |
| JP2011122708A (ja) | 2011-06-23 |
| KR20120117777A (ko) | 2012-10-24 |
| CN102656390B (zh) | 2015-09-30 |
| CN102656390A (zh) | 2012-09-05 |
| US20120296531A1 (en) | 2012-11-22 |
| EP2515006A1 (en) | 2012-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5503955B2 (ja) | 作業車両の変速制御装置 | |
| JP5503954B2 (ja) | 作業車両のクラッチ制御装置 | |
| JP4838861B2 (ja) | 産業車両の変速制御装置 | |
| JP4975041B2 (ja) | 産業車両の変速制御装置 | |
| JP5156693B2 (ja) | 産業車両のエンジン回転数制御装置 | |
| WO2013115399A1 (ja) | 作業車両のエンジン制御装置 | |
| JP4943125B2 (ja) | 産業車両の変速制御装置 | |
| JP5061120B2 (ja) | 産業車両の変速制御装置 | |
| JP5270464B2 (ja) | 産業車両の変速制御装置 | |
| JP7240790B2 (ja) | 作業車両、および作業車両の制御方法 | |
| JP5017291B2 (ja) | 作業車両の変速制御装置 | |
| JP2011122706A (ja) | 作業車両のクラッチ制御装置 | |
| JP6200792B2 (ja) | 作業車両のエンジン制御装置 | |
| JP2010180848A (ja) | 作業車両の原動機制御装置 | |
| WO2010147150A1 (ja) | 産業車両のクラッチ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201080057055.6 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 10837609 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 20127015282 Country of ref document: KR Kind code of ref document: A |
|
| REEP | Request for entry into the european phase |
Ref document number: 2010837609 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 5236/DELNP/2012 Country of ref document: IN Ref document number: 2010837609 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13516098 Country of ref document: US |