(1)第1の実施形態
本発明の第1の実施形態にかかる駆動装置を、図面を参照しながら以下に説明する。本実施形態の駆動装置1は、例えば駆動駒等の第1部材とロータ等の第2部材とを相対的に変位させる相対駆動を行うことで、カメラのレンズ鏡筒等の光学機器や電子機器を駆動するためのものである。
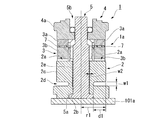
図1は本実施形態の駆動装置1の正面図であり、図2はその断面図である。
図1及び図2に示すように、駆動装置1は、複数の保持部2aが設けられたベース部(ベース部材)2と、保持部2aに保持された駆動駒(第1部材)3と、駆動駒3に隣接して配置されたロータ(第2部材)4と、ベース部2に挿通された支持軸5と、を備えている。
ベース部2は、例えばステンレス鋼等の金属材料により中空円筒状に形成され、支持軸5が挿通されることで、支持軸5を囲むように設けられている。ベース部2の表面は、例えば絶縁膜等が形成されて絶縁処理が施されている。
ロータ4は、ベアリング5bを介して支持軸5によって軸支され、支持軸5を回転軸として回転自在に設けられている。ロータ4の外周面には、例えばカメラのレンズ鏡筒等を駆動するための歯車4aが形成されている。ロータ4のベース部2側の面は、複数の駆動駒3によって支持されている。
ベース部2の一方の端部は、例えば不図示のボルト等により取付部101aに固定されている。ベース部2の取付部101aに対向する面の中央部には、凹部2bが形成されている。凹部2bには、支持軸5の基端に形成された拡径部5aが挿入(嵌入)されている。この状態でベース部2が取付部101aに固定されることで、支持軸5がベース部2及び取付部101aに固定されている。
ベース部2の他方の端部には、凹状の保持部2aが、ベース部2の周方向、すなわちロータ4の回転方向Rに複数設けられている。保持部2aは、駆動駒3を支持軸5に垂直でロータ4の回転方向Rに沿う方向(第1の方向)の両側から支持するとともに、駆動駒3を支持軸5に平行な方向(第2の方向)に駆動可能に保持している。また、図1に示すように、ベース部2のロータ4側の端部の角部には、面取り部(露出形成部)2hが設けられている。面取り部2hは、ベース部2のロータ4側の端部の外周側の角部及び内周側の角部の双方に、ベース部2の全周に亘って設けられている。
図2に示すように、ベース部2の側面2cは、支持軸5と略平行に設けられている。側面2cの保持部2aと取付部101a側の端部との間には、取付部101aから保持部2aへの振動の伝達を抑制する振動抑制部としての溝部2dが形成されている。すなわち、溝部2dは、支持軸5に略垂直でかつロータ4の回転方向Rに沿う方向(第1の方向)と交差するベース部2の側面2cに設けられている。溝部2dは、ベース部2の周方向に連続的に設けられ、保持部2aと取付部101a側の端部との中間よりも取付部101a側の端部に近い位置に設けられている。
溝部2dの深さd1は、例えばベース部2の半径r1の40%以上かつ80%以下の範囲である。上記数値は一例であってこれに限定されない。溝部2dの深さd1は、例えば、ベース部2の半径r1の10,20,30,40,50,60,70,80,又は90%にできる。また、支持軸5に平行な方向(第2の方向)の溝部2dの幅w1は、ベース部2の振動の振幅よりも大きく、後述する第1圧電素子6、第2圧電素子7、駆動駒3、及びベース部2からなる支持駆動部(構造部)1aの共振振動の振幅よりも大きくなるように形成されている。一例において、溝部2dの幅w1は、ベース部2の半径よりも短くできる。
図2に示すように、ベース部2と支持軸5との間には、取付部101aから保持部2aへの振動を抑制するための間隙(振動抑制部)2eが設けられている。間隙2eは、支持軸5と平行な方向に、ベース部2の保持部2a側の端部から溝部2dの取付部101a側の縁と同様の位置まで設けられている。また、間隙2eの幅w2は、溝部2dの幅w1と同様に、ベース部2の振動の振幅よりも大きく、後述する支持駆動部1aの共振振動の振幅よりも大きくなるように形成されている。
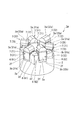
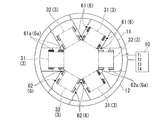
図3は図1に示す駆動装置1の支持駆動部1aの斜視図であり、図4はその平面図である。
図3及び図4に示すように、駆動駒3は、断面が山形の六角柱形状を有する先端部3aと略直方体形状を有する基部3bと、を有している。先端部3aは、例えばステンレス鋼等により形成されている。基部3bは、例えば軽金属合金等により形成されている。これら先端部3aおよび基部3bは、双方とも導電性を有している。基部3bは、保持部2aによって支持軸5と平行な方向に駆動可能に支持されている。先端部3aは、保持部2aから突出してロータ4を支持するようになっている。先端部3aは、ロータ4に接触する上面の面積が基部3b側の底面の面積よりも小さくなる先細状の形状に設けられている。
図4に示すように、駆動駒3の幅w3方向(第1の方向)には、駆動駒3の基部3bを幅w3方向の両側から挟みこむ一対の第1圧電素子6,6が二対設けられている。駆動駒3の幅w3方向は、支持軸5に垂直でロータ4の回転方向Rに沿う方向であって、ベース部2の平面視における中心線CLと略垂直な方向である。第1圧電素子6は、保持部2aの深さd2方向に沿って延びる細長い長方形状の形状に形成され、基部3bと保持部2aとの間に挟持されている。これにより、第1圧電素子6は、ベース部2に設けられた溝部2d(図1、図2参照)とロータ4との間に配置されている。
第1圧電素子6は、例えば導電性の接着剤により駆動駒3の基部3bと保持部2aとに接着されている。また、ベース部2の中心を通る中心線CLと略平行な駆動駒3の奥行p1方向に配置された2つの第1圧電素子6,6は、互いに略平行になっている。各々の第1圧電素子6の形状及び寸法は、全て略等しくなっている。
図3に示すように、駆動駒3の基部3bと先端部3aとの間には、一対の第2圧電素子7,7が、互いに略平行に設けられている。第2圧電素子7は、駆動駒3の幅w3方向と略平行に延びる細長い長方形状に形成されている。第2圧電素子7は、先端部3aの底面と基部3bの上面との間に挟持され、例えば導電性の接着剤により先端部3aの底面と基部3bの上面とに接着されている。各々の第2圧電素子7の形状及び寸法は、全て略等しくなっている。
第1圧電素子6及び第2圧電素子7は、例えばチタン酸ジルコン酸鉛(PZT)により形成され、その振動モードは厚み滑り振動である。すなわち、第1圧電素子6は、駆動駒3を、支持軸5と略平行な保持部2aの深さd2方向に、ベース部2に対して相対的に駆動させる。第2圧電素子7は、駆動駒3の先端部3aを駆動駒3の幅w3方向(第3の方向)に、基部3b及びベース部2に対して相対的に駆動させる。すなわち、本実施形態では、第1圧電素子6が駆動駒3を挟み込む方向(第1の方向)と、第2圧電素子7が駆動駒3の先端部3aを駆動させる方向(第3の方向)とが略等しくなっている。
これら複数の第1圧電素子6、第2圧電素子7、駆動駒3、及びベース部2により、ロータ4を支持し、かつロータ4を駆動駒3及びベース部2と相対的に駆動させる支持駆動部1aが構成されている。
図3に示すように、保持部2aは、ベース部2の端部に設けられ、ベース部2に王冠状の凹凸を形成している。図4に示すように、保持部2aは、ベース部2の周方向の略60°毎に均等に形成されている。保持部2aは、平面視でベース部2の中心を通る中心線CLと略平行に設けられた一対の支持面2f,2fを備えている。支持面2fは、駆動駒3の基部3bを、ベース部2の中心線CLと略垂直な保持部2aの幅w4方向(第1の方向)の両側から一対の第1圧電素子6,6を介して挟み込むように保持している。
図5Aは保持部2a及び駆動駒3を拡大した組立正面図であり、図5Bは保持部2a及び駆動駒3を拡大した正面図である。
図5A及び図5Bに示すように、ベース部2に設けられた凹状の保持部2aの支持面2fは、図2に示す支持軸5と略平行な保持部2aの深さd2方向(第2の方向)に対して傾斜させて設けられている。
支持面2fは、図1に示す駆動駒3の先端部3aに支持されたロータ4からの距離が遠ざかるほど、対向する支持面2f,2f同士の間隔が漸次狭くなるように傾斜している。換言すると、保持部2aは、底面2gに近づくほど幅w4が狭くなっている。保持部2aの深さd2方向に対する支持面2fの傾斜角度αは、各部材の寸法や公差等の関係から、2°以上6°以下であることが好ましい。本実施形態における支持面の傾斜角度αは4°である。
また、図5A及び図5Bに示すように、支持面2fに対向する駆動駒3の基部3bの側面3cは、支持面2fと同様に、支持軸5と略平行な駆動駒3の高さh1方向(第2の方向)に対して傾斜させて設けられている。これにより、駆動駒3の基部3bの側面3cは、支持面2fと略平行に設けられている。側面3cには、電極部6aを備えた第1圧電素子6が予め導電性の接着剤を介して接合されている。なお、図1~図4においては、電極部6aの図示を省略している。
ここで、基部3bの保持部2aの底面2g側の端部における基部3b及び一対の第1圧電素子6,6の幅w5は、保持部2aの開口部における幅w4よりも小さく、保持部2aの深さd2方向の途中における幅w4’よりも大きくなっている。
そのため、駆動駒3の基部3b及び一対の第1圧電素子6,6を保持部2aに保持させると、図5Bに示すように、駆動駒3の底面3dと保持部2aの底面2gとが離間した状態で、基部3bが保持部2aの幅w4方向の両側から一対の第1圧電素子6,6を介して支持面2fによって支持される。すなわち、支持面2fは、駆動駒3を保持部2aの幅w4方向(第1の方向)の両側から支持するとともに、支持軸5と略平行な保持部2aの深さd2方向(第2の方向)において位置決めをするように、深さd2方向に対して傾斜させて設けられている。
図6は、図3に示す駆動駒3及び保持部2aを部分的に拡大して表した斜視図である。
図6に示すように、第1圧電素子6は、駆動駒3の基部3bとベース部2の保持部2aの支持面2fとの間に配置されている。電極部6aは、第1圧電素子6の支持面2fに対向する面に設けられ、一部がベース部2の端部の角部に設けられた面取り部2hによってベース部2から露出されている。本実施形態では、面取り部2hによってベース部2から露出された電極部6aの一部が、後述する電源部に接続される露出部6bとなっている。
表面に絶縁処理が施されたベース部2の外周側の側面2cには、例えば銅箔等の導電性材料によって電極面2iが形成されている。電極面2iは、保持部2aの縁に沿って設けられ、保持部2aの周囲に所定の幅w6を有して連続的に設けられている。電極面2iは、ベース部2の内周側の側面(図示略)にも外周側の側面2cと同様に設けられている。また、電極面2iは外周側の面取り部2h、ロータ4側の端面及び内周側の面取り部2hにも、保持部2aの縁に沿って連続的に設けられている。すなわち、ベース部2の各面に設けられた電極面2iは、全て連続して設けられている。
面取り部2hによってベース部2から露出された電極部6aの露出部6bは、導電性接着剤21により面取り部2hに設けられた電極面2iと電気的に接続されている。これにより、駆動駒3の基部3bと保持部2aの支持面2fとの間に設けられた4つの第1圧電素子6の電極部6aは、全て電気的に接続される。
保持部2aの底面2g側の縁に沿って設けられた電極面2iの中央部には、導電性接着剤21を介して第1配線11(第2配線12)が接続されている。これにより、4つの第1圧電素子6の電極部6aは、それぞれ露出部6bに接続された導電性接着剤21及び電極面2iを介して第1配線11(第2配線12)に電気的に接続されている。すなわち、電極部6aは第1配線11(第2配線12)を介して所定の駆動電圧が印加されるようになっている。
また、図示は省略するが、駆動駒3の先端部3aには、例えば導電性接着剤を介して、後述する第3配線(第4配線)が接続され、所定の駆動電圧が印加されるようになっている。また、基部3bには、例えば導電性接着剤を介してグランド配線が接続されている。これにより、基部3bは接地されている。
本実施形態の駆動駒3は、先端部3aと基部3bとの間に一対の第2圧電素子7,7を備え、基部3bの側面に第1圧電素子6,6を二対備えている。そして、図3及び図4に示すように、駆動装置1は、この駆動駒3及び二対の第1圧電素子6を3つ備えた駆動駒3の組を、第1組及び第2組の二組備えている。第1組の駆動駒31と第2組の駆動駒32とは、同一の円周上に配置されている。また、各々の組の駆動駒31,32は、ロータ4の回転方向Rにそれぞれ均等に配置され、異なる組の駆動駒31,32が回転方向Rに交互に(順番に)配置されている。
図7Aは第1圧電素子6の模式的な配線図であり、図7Bは第2圧電素子7の模式的な配線図である。なお、図6に示すように、電極部6aの各々は導電性接着剤21及び電極面2iを介して第1配線11(第2配線12)に電気的に接続されているが、図7Aではこれらの図示は省略している。
図7A及び図7Bに示すように、本実施形態の駆動装置1は、第1圧電素子6及び第2圧電素子7の各々に電圧を供給する電源部10を備えている。電源部10は、図3及び図4に示す第1組及び第2組のそれぞれの駆動駒31,32の先端部31a,32aが、順次、図1及び図2に示すロータ4との接触、ロータ4の回転方向Rへの送り、ロータ4からの離間、ロータ4の回転方向Rと逆方向の戻り、を繰り返すように第1圧電素子6及び第2圧電素子7に電圧を供給する。
図7Aに示すように、第1組の駆動駒31の各々が備える第1圧電素子61の電極部61aは、第1配線11を介して電源部10の第1端子T1に接続されている。第2組の駆動駒32の各々が備える第1圧電素子62の電極部62aは、第2配線12を介して電源部10の第2端子T2に接続されている。
図7Bに示すように、第1組の駆動駒31の各々が備える第2圧電素子71は、駆動駒31の先端部31aに接続された第3配線13を介して電源部10の第3端子T3に接続されている。第2組の駆動駒32の各々が備える第2圧電素子72は、駆動駒32の先端部32aに接続された第4配線14を介して電源部10の第4端子T4に接続されている。
また、図7A及び図7Bにおいて図示は省略するが、駆動駒31,32の基部31b,32bは、接地されている。
以上の構成により、図6に示す第1圧電素子6の電極部6aの露出部6bは、導電性接着剤21、電極面2i、第1配線11(第2配線12)を介して図7A及び図7Bに示す電源部10に電気的に接続される。したがって、第1圧電素子の電極部6aと駆動駒3の基部3bとの間には、第1圧電素子6を駆動させる所定の駆動電圧が印加される。また、駆動駒3の先端部3aと基部3bとの間には、第2圧電素子7を駆動させる所定の駆動電圧が印加される。
図8は、電源部10が各端子T1,T2,T3,T4に発生させる電圧のタイミングチャートの一例である。
図8に示すように、電源部10は第1端子T1にPhase1~Phase2の間は-1.0Vの電圧を発生させ、Phase3~Phase7の5Phaseは1.0Vの電圧を発生させ、Phase8~Phase10の3Phaseは-1.0Vの電圧を発生させる。以降のPhaseでは、1.0Vの電圧を5Phase発生させ、-1.0Vの電圧を3Phase発生させることを繰り返す。すなわち、電源部10は、第1端子に8Phaseを一周期とする電圧を発生させる。
電源部10は、第2端子T2に、第1端子T1に発生させる電圧と180°の位相差を有し、第1端子T1に発生させる電圧と同様の8Phaseを一周期とする電圧を発生させる。すなわち、第1端子に発生する電圧と、第2端子に発生する電圧とは、半周期分の4Phaseの位相差を有している。
電源部10は、Phase1において第3端子T3に発生させる電圧を0Vに維持し、Phase2において-3.0Vの電圧を発生させ、Phase3~Phase8までの各Phaseにおいて電圧を1.0Vずつ増加させる。以降のPhaseでは、このPhase1~Phase8の電圧の発生パターンを繰り返す。すなわち、電源部10は、第3端子T3に8Phaseを一周期とする電圧を発生させる。
電源部10は、第4端子T4に、第3端子T3に発生させる電圧と180°の位相差を有し、第3端子T3に発生させる電圧と同様の8Phaseを一周期とする電圧を発生させる。すなわち、第3端子に発生する電圧と、第4端子に発生する電圧とは、半周期分の4Phaseの位相差を有している。
本実施形態では、電源部10が第1圧電素子6及び第2圧電素子7に供給する電圧の周波数は、第1圧電素子6、第2圧電素子7、駆動駒3、及びベース部2からなる支持駆動部(構造部)1aの共振振動の振動数と略等しくなっている。
次に、本実施形態の駆動装置1の作用について、図9~図12を用いて説明する。
図9~図11は、第1組と第2組の駆動駒31,32の動作とロータ4の動作を示す拡大正面図である。
図12は、第1組及び第2組の駆動駒31,32の先端部31a,32aの各軸方向の変位と時間tの関係を示すグラフである。図12(a)及び図12(b)において、Y軸方向におけるロータ4との接触位置y1は、破線で表されている。
図9(a)~図11(a)では、ロータ4の回転方向R(図4参照)に沿う第1組の駆動駒31の幅w31方向(第1の方向)をX1方向、支持軸5(図2参照)に平行な方向(第2の方向)をY方向とする直交座標系を用いて説明する。図9(b)~図11(b)では、ロータ4の回転方向Rに沿う第2組の駆動駒32の幅w32方向(第1の方向)をX2方向、支持軸5に平行な方向(第2の方向)をY方向とする直交座標系を用いて説明する。
(Phase0)
電源部10は、図8に示すように、Phase0において、各端子T1,T2,T3,T4に電圧を発生させず(0V)、図7A及び図7Bに示す第1圧電素子6及び第2圧電素子7に0Vの電圧を供給している(電圧を供給していない)状態である。
図9(a)及び図9(b)に示すように、Phase0において、第1組の駆動駒31と第2組の駆動駒32は、それぞれ先端部31a,32aの上面がロータ4に接した状態で静止している。ロータ4は、駆動駒31,32の先端部31a,32aに支持された状態で静止している。
(Phase1)
電源部10は、図8に示すように、Phase1において、第1端子T1に-1.0Vの電圧を発生させ、図7Aに示す第1組の駆動駒31の第1圧電素子61の電極部61aに、第1配線11を介して電圧を供給する。また、電源部10は、図8に示すように、Phase1において、第3端子T3の電圧を0Vに維持し、図7Bに示す第1組の駆動駒31の第2圧電素子71に第3配線13を介して0Vの電圧を供給する。
すると、図9(a)に示すように、Phase1において、第1組の駆動駒31を駆動する第1圧電素子61が厚み滑り変形し、駆動駒31の基部31bを保持部2aの支持面2fに対してY方向のベース部2側(Y軸負方向側)へ移動させる(図12(a)、Phase1参照)。また、図9(a)に示すように、Phase1において、第2圧電素子71は変形せず、先端部31aはX1方向へは移動しない(図12(c)、Phase1参照)。これにより、駆動駒31の先端部31aがY軸負方向側へ移動し、ロータ4から離間する。
電源部10は、図8に示すように、Phase1において、第2端子T2に1.0Vの電圧を発生させ、図7Aに示す第2組の駆動駒32の第1圧電素子62の電極部62aに第2配線12を介して電圧を供給する。また、電源部10は、図8に示すように、Phase1において、第4端子T4の電圧を0Vに維持し、図7Bに示す第2組の駆動駒32の第2圧電素子72には第4配線を介して0Vの電圧を供給する。
すると、図9(b)に示すように、Phase1において、第2組の駆動駒32を駆動する第1圧電素子62が厚み滑り変形し、駆動駒32の基部32bを保持部2aの支持面2fに対してY方向のロータ4側(Y軸正方向側)へ移動させる(図12(b)、Phase1参照)。また、図9(b)に示すように、Phase1において、第2圧電素子72は変形せず、先端部32aはX2方向へは移動しない(図12(d)、Phase1参照)。これにより、駆動駒32がY軸正方向側へ移動して、先端部32aがロータ4をY軸正方向側へ押し上げる。
すなわち、Phase1においては、図9(a)に示すように、第1組の駆動駒31の先端部31aは、Y軸負方向側へ移動してロータ4から離間する。同時に、図9(b)に示すように、第2組の駆動駒32の先端部32aは、ロータ4に当接してロータ4を支持しつつ、ロータ4をY軸正方向側へ押し上げる。
(Phase2)
電源部10は、図8に示すように、Phase2において、第1端子T1の電圧を-1.0Vに維持し、図7Aに示す第1組の駆動駒31の第1圧電素子61の電極部61aに第1配線11を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase2において、第3端子T3に-3.0Vの電圧を発生させ、図7Bに示す第1組の駆動駒31の第2圧電素子71に第3配線13を介して電圧を供給する。
すると、図9(a)に示すように、Phase2において、第1組の駆動駒31をY方向に駆動する第1圧電素子61の変形が維持されて、先端部31aがロータ4から離間した状態が維持される(図12(a)、Phase2参照)。この状態で、図9(a)に示すように、Phase2において、第2圧電素子71が厚み滑り変形し、先端部31aが基部31b及びベース部2に対してX1軸負方向側へ移動する(図12(c)参照)。このときの先端部31aの移動量は、第2圧電素子71に供給される電圧の絶対値に比例する。
電源部10は、図8に示すように、Phase2において、第2端子T2の電圧を1.0Vに維持し、図7Aに示す第2組の駆動駒32の第1圧電素子62の電極部62aに第2配線12を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase2において、第4端子T4に1.0Vの電圧を発生させ、図7Bに示す第2組の駆動駒32の第2圧電素子72に第4配線14を介して電圧を供給する。
すると、図9(b)に示すように、Phase2において、第2組の駆動駒32をY方向に駆動する第1圧電素子62の変形が維持されて、先端部32aがロータ4に接触した状態が維持される(図12(b)、Phase2参照)。この状態で、図9(b)に示すように、Phase2において、第2圧電素子72が厚み滑り変形し、先端部32aが基部32b及びベース部2に対してX2軸正方向側へ移動する(図12(d)、Phase2参照)。このときの先端部32aの移動量は、電圧の絶対値に比例するため、第1組の先端部31aのX1軸負方向側への移動量と比較して小さくなる。
すなわち、Phase2においては、図9(b)に示すように、第2組の駆動駒32の先端部32aのX2軸正方向側への移動により、先端部32aの上面からロータ4の下面に摩擦力が作用する。ここで、第2組の駆動駒32は、図3及び図4に示すように、ロータ4の回転方向Rに沿ってベース部2の周方向に配置される。先端部32aは、ロータ4の回転方向Rに沿う駆動駒32の幅w32方向(X2方向)に変位する。そのため、ロータ4は、駆動駒32の先端部32aによって回転方向Rに駆動され、図1及び図2に示す支持軸5を中心とする回転を開始する。
(Phase3)
電源部10は、図8に示すように、Phase3において、第1端子T1に正負が逆転した1.0Vの電圧を発生させ、図7Aに示す第1組の駆動駒31の第1圧電素子61の電極部61aに第1配線11を介して電圧を供給する。また、電源部10は、図8に示すように、Phase3において、第3端子T3に-2.0Vの電圧を発生させ、図7Bに示す第1組の駆動駒31の第2圧電素子71に第3配線13を介して電圧を供給する。
すると、図9(a)に示すように、Phase3において、第1組の駆動駒31を駆動する第1圧電素子61が逆方向に厚み滑り変形し、駆動駒31の基部31bをY軸正方向側へ移動させる(図12(a)、Phase3参照)。同時に、図9(a)に示すように、Phase3において、第2圧電素子71のX1軸負方向側への変形量が減少し、先端部31aが基部31b及びベース部2に対してX1軸正方向側へ移動する(図12(c)、Phase3参照)。このときの移動量は、Phase3で新たに供給された-2.0VとPhase2で供給されていた-3.0Vとの電圧の差に比例する。
電源部10は、図8に示すように、Phase3において、第2端子T2の電圧を維持し、図7Aに示す第2組の駆動駒32の第1圧電素子62の電極部62aに第2配線12を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase3において、第4端子T4に2.0Vの電圧を発生させ、図7Bに示す第2組の駆動駒32の第2圧電素子72に第4配線14を介して電圧を供給する。
すると、図9(b)に示すように、Phase3において、第2組の駆動駒32を駆動する第1圧電素子62の変形が維持されて、先端部32aがロータ4に接触した状態が維持される(図12(b)、Phase3参照)。この状態で、図9(b)に示すように、Phase3において、第2圧電素子72が厚み滑り変形し、先端部32aが基部32b及びベース部2に対してX2軸正方向側へ移動する(図12(d)、Phase3参照)。このときの移動量は、Phase3で新たに供給された2.0VとPhase2で供給されていた1.0Vとの電圧の差の絶対値に比例する。
すなわち、Phase3においては、図9(a)に示すように、第1組の駆動駒31の先端部31aは、ロータ4の回転方向Rに沿うX1軸正方向側へ移動しながらY軸正方向側へ移動してロータ4に接近して当接する。同時に、図9(b)に示すように、第2組の駆動駒32の先端部32aは、ロータ4に当接してロータ4を支持しつつ、ロータ4を回転方向Rへ駆動する。
(Phase4)
電源部10は、図8に示すように、Phase4において、第1端子T1の電圧を1.0Vに維持し、図7Aに示す第1組の駆動駒31の第1圧電素子61の電極部61aに第1配線11を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase4において、第3端子T3に-1.0Vの電圧を発生させ、図7Bに示す第1組の駆動駒31の第2圧電素子71に第3配線13を介して電圧を供給する。
すると、図10(a)に示すように、Phase4において、第1組の駆動駒31をY軸正方向側に駆動する第1圧電素子61の変形が維持されて、先端部31aがロータ4に当接した状態が維持される(図12(a)、Phase4参照)。同時に、図10(a)に示すように、Phase4において、第2圧電素子71のX1軸負方向側への変形量が減少し、先端部31aが基部31b及びベース部2に対してX1軸正方向側へ移動する(図12(c)、Phase4参照)。このときの移動量は、Phase4で新たに供給された-1.0VとPhase3で供給されていた-2.0Vとの電圧の差の絶対値に比例する。
電源部10は、図8に示すように、Phase4において、第2端子T2に正負が逆転した-1.0Vの電圧を発生させ、図7Aに示す第2組の駆動駒32の第1圧電素子62の電極部62aに第2配線12を介して電圧を供給する。また、電源部10は、図8に示すように、Phase4において、第4端子T4に3.0Vの電圧を発生させ、図7Bに示す第2組の駆動駒32の第2圧電素子72に第4配線14を介して電圧を供給する。
すると、図10(b)に示すように、Phase4において、第2組の駆動駒32を駆動する第1圧電素子62が逆方向に厚み滑り変形し、駆動駒32の基部32bをY軸負方向側へ移動させる(図12(b)、Phase4参照)。同時に、図10(b)に示すように、Phase4において、第2圧電素子72のX2軸正方向側への変形量が増加し、先端部32aが基部32b及びベース部2に対してX2軸正方向側へ移動する(図12(d)、Phase4参照)。このときの移動量は、Phase4で新たに供給された3.0VとPhase2で供給されていた2.0Vとの電圧の差の絶対値に比例する。
すなわち、Phase4においては、図10(a)に示すように、第1組の駆動駒31の先端部31aは、ロータ4に当接した状態でロータ4の回転方向Rに沿うX1軸正方向側に移動し、ロータ4を支持して回転方向Rへ駆動させる。同時に、図10(b)に示すように、第2組の駆動駒32の先端部32aは、ロータ4の回転方向Rへ沿うX2軸正方向側へ移動しながら、Y軸負方向側へ移動してロータ4から離間する。これにより、第1組及び第2組の駆動駒31,32の先端部31a,32aによってロータ4を回転方向Rに駆動させつつ、第2組の駆動駒32の先端部32aから第1組の駆動駒31の先端部31aへロータ4が受け渡される。
このとき、Phase4において、双方の駆動駒31,32が、極めて短時間、ロータ4から離間する場合がある。このような場合であっても、ロータ4は、その慣性によりY方向の変位を殆どすることなく、第2組の駆動駒32の先端部32aによって支持されていた位置に留まる。そのため、ロータ4は、Y方向の略一定の位置が維持され、回転方向Rに駆動された状態で、第1組の駆動駒31の先端部31aによりY方向に支持され、回転方向Rへ駆動される。これにより、ロータ4は、Y方向の略一定の位置で支持軸5を中心として回転を継続する。
(Phase5)
電源部10は、図8に示すように、Phase5において、第1端子T1の電圧を1.0Vに維持し、図7Aに示す第1組の駆動駒31の第1圧電素子61の電極部61aに第1配線11を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase5において、第3端子T3に発生させる電圧を0Vにし、図7Bに示す第1組の駆動駒31の第2圧電素子71に第3配線13を介して供給する電圧を0Vにする。
すると、図10(a)に示すように、Phase5において、第1組の駆動駒31をY方向に駆動する第1圧電素子61の変形が維持されて、先端部31aがロータ4に接触した状態が維持される(図12(a)、Phase5参照)。この状態で、図10(a)に示すように、Phase5において、第2圧電素子71が元の形状に戻り、先端部31aが基部31b及びベース部2に対してX1軸正方向側へ移動する(図12(c)、Phase5参照)。このときの先端部31aの移動量は、Phase4において第2圧電素子71に供給されていた電圧の絶対値に比例する。
電源部10は、図8に示すように、Phase5において、第2端子T2の電圧を-1.0Vに維持し、図7Aに示す第2組の駆動駒32の第1圧電素子62の電極部62aに第2配線12を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase5において、第4端子T4に発生させる電圧を0Vにし、図7Bに示す第2組の駆動駒32の第2圧電素子72に第4配線14を介して供給する電圧を0Vにする。
すると、図10(b)に示すように、Phase5において、第2組の駆動駒32をY方向に駆動する第1圧電素子62の変形が維持されて、先端部32aがロータ4から離間した状態が維持される(図12(b)Phase5参照)。同時に、図10(b)に示すように、Phase5において、第2圧電素子72が元の形状に戻り、先端部32aが基部32b及びベース部2に対してX2軸負方向側へ移動する(図12(d)、Phase5参照)。このときの先端部32aの移動量は、Phase4において第2圧電素子72に供給されていた電圧の絶対値に比例する。
すなわち、Phase5においては、図10(a)に示すように、第1組の駆動駒31の先端部31aは、ロータ4に当接した状態を維持してロータ4を支持しつつ、X1軸正方向側に移動してロータ4を回転方向Rへ駆動させる。同時に、図10(b)に示すように、第2組の駆動駒32の先端部32aは、Y軸負方向側へ移動してロータ4から離間した状態を維持しつつ、基部32b及びベース部2に対してロータ4の回転方向Rと逆のX2軸負方向側へ移動する。
(Phase6)
電源部10は、図8に示すように、Phase6において、第1端子T1の電圧を1.0Vに維持し、図7Aに示す第1組の駆動駒31の第1圧電素子61の電極部61aに第1配線11を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase6において、第3端子T3に1.0Vの電圧を発生させ、図7Bに示す第1組の駆動駒31の第2圧電素子71に第3配線13を介して電圧を供給する。
すると、図10(a)に示すように、Phase6において、第1組の駆動駒31をY方向に駆動する第1圧電素子61の変形が維持されて、先端部31aがロータ4に接触した状態が維持される(図12(a)、Phase6参照)。この状態で、図10(a)に示すように、Phase6において、第2圧電素子71が厚み滑り変形し、先端部31aが基部31b及びベース部2に対してX1軸正方向側へ移動する(図12(c)、Phase6参照)。このときの移動量は、Phase6で新たに供給された電圧の絶対値に比例する。
電源部10は、図8に示すように、Phase6において、第2端子T2の電圧を-1.0Vに維持し、図7Aに示す第2組の駆動駒32の第1圧電素子62の電極部62aに第2配線12を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase6において、第4端子T4に-3.0Vの電圧を発生させ、図7Bに示す第2組の駆動駒32の第2圧電素子72に第4配線14を介して電圧を供給する。
すると、図10(b)に示すように、Phase6において、第2組の駆動駒32をY方向に駆動する第1圧電素子62の変形が維持されて、先端部32aがロータ4から離間した状態が維持される(図12(b)、Phase6参照)。この状態で、図10(b)に示すように、Phase6において、第2圧電素子72が厚み滑り変形し、先端部32aが基部32b及びベース部2に対してX2軸負方向側へ移動する(図12(d)、Phase6参照)。このときの先端部32aの移動量は、第2圧電素子72に供給される電圧の絶対値に比例する。
すなわち、Phase6においては、図10(a)に示すように、第1組の駆動駒31の先端部31aは、ロータ4に当接した状態を維持してロータ4を支持しつつ、X1軸正方向側に移動してロータ4を回転方向Rへ駆動する。同時に、図10(b)に示すように、第2組の駆動駒32の先端部32aは、ロータ4から離間した状態を維持しつつ、基部32b及びベース部2に対してロータ4の回転方向Rと逆のX2軸負方向側へさらに移動する。
(Phase7)
電源部10は、図8に示すように、Phase7において、第1端子T1の電圧を1.0Vに維持し、図7Aに示す第1組の駆動駒31の第1圧電素子61の電極部61aに第1配線11を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase7において、第3端子T3に2.0Vの電圧を発生させ、図7Bに示す第1組の駆動駒31の第2圧電素子71に第3配線13を介して電圧を供給する。
すると、図10(a)に示すように、Phase7において、第1組の駆動駒31を駆動する第1圧電素子61の変形が維持されて、先端部31aがロータ4に接触した状態が維持される(図12(a)、Phase7参照)。この状態で、図10(a)に示すように、Phase7において、第2圧電素子71が厚み滑り変形し、先端部31aが基部31b及びベース部2に対してX1軸正方向側へ移動する(図12(c)、Phase7参照)。このときの移動量は、Phase7で新たに供給された2.0VとPhase6で供給されていた1.0Vとの電圧の差の絶対値に比例する。
電源部10は、図8に示すように、Phase7において、第2端子T2に正負が逆転した1.0Vの電圧を発生させ、図7Aに示す第2組の駆動駒32の第1圧電素子62の電極部62aに第2配線12を介して電圧を供給する。また、電源部10は、図8に示すように、Phase7において、第4端子T4に-2.0Vの電圧を発生させ、図7Bに示す第2組の駆動駒32の第2圧電素子72に第4配線14を介して電圧を供給する。
すると、図10(b)に示すように、Phase7において、第2組の駆動駒32を駆動する第1圧電素子62が逆方向に厚み滑り変形し、駆動駒32の基部32bをY軸正方向側へ移動させる(図12(b)、Phase7参照)。同時に、図10(b)に示すように、Phase7において、第2圧電素子72のX2軸負方向側への変形量が減少し、先端部32aが基部32b及びベース部2に対してX2軸正方向側へ移動する(図12(d)、Phase7参照)。このときの移動量は、Phase7で新たに供給された-2.0VとPhase6で供給されていた-3.0Vとの電圧の差の絶対値に比例する。
すなわち、Phase7においては、図10(a)に示すように、第1組の駆動駒31の先端部31aは、ロータ4に当接した状態を維持してロータ4を支持しつつ、ロータ4を回転方向Rへ駆動する。同時に、図10(b)に示すように、第2組の駆動駒32の先端部32aは、ロータ4の回転方向Rに沿うX2軸正方向側へ移動しながらY軸正方向側へ移動してロータ4に接近して当接する。
(Phase8)
電源部10は、図8に示すように、Phase8において、第1端子T1に正負が逆転した-1.0Vの電圧を発生させ、図7Aに示す第1組の駆動駒31の第1圧電素子61の電極部61aに第1配線11を介して電圧を供給する。また、電源部10は、図8に示すように、Phase8において、第3端子T3に3.0Vの電圧を発生させ、図7Bに示す第1組の駆動駒31の第2圧電素子71に第3配線13を介して電圧を供給する。
すると、図11(a)に示すように、Phase8において、第1組の駆動駒31を駆動する第1圧電素子61が逆方向に厚み滑り変形し、駆動駒3の基部3bをY軸負方向側へ移動させる(図12(a)、Phase8参照)。同時に、図11(a)に示すように、Phase8において、第2圧電素子71のX1軸正方向側への変形量が増加し、先端部31aが基部31b及びベース部2に対してX1軸正方向側へ移動する(図12(c)、Phase8参照)。このときの移動量は、Phase8で新たに供給された3.0VとPhase7で供給されていた2.0Vとの電圧の差の絶対値に比例する。
電源部10は、図8に示すように、Phase8において、第2端子T2の電圧を1.0Vに維持し、図7Aに示す第2組の駆動駒32の第1圧電素子62の電極部62aに第2配線12を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase8において、第4端子T4に-1.0Vの電圧を発生させ、図7Bに示す第2組の駆動駒32の第2圧電素子72に第4配線14を介して電圧を供給する。
すると、図11(b)に示すように、Phase8において、第2組の駆動駒32をY方向に駆動する第1圧電素子62の変形が維持されて、先端部32aがロータ4に当接した状態が維持される(図12(b)、Phase8参照)。同時に、図11(b)に示すように、Phase8において、第2圧電素子72のX2軸負方向側への変形量が減少し、先端部32aが基部32b及びベース部2に対してX2軸正方向側へ移動する(図12(d)、Phase8参照)。このときの移動量は、Phase8で新たに供給された-1.0VとPhase7で供給されていた-2.0Vとの電圧の差の絶対値に比例する。
すなわち、Phase8においては、図11(a)に示すように、第1組の駆動駒31の先端部31aは、ロータ4の回転方向Rへ沿うX1軸正方向側へ移動しながら、Y軸負方向側へ移動してロータ4から離間する。同時に、図11(b)に示すように、第2組の駆動駒32の先端部32aは、ロータ4に当接した状態で、ロータ4の回転方向Rに沿うX2軸正方向側に移動し、ロータ4を支持して回転方向Rへ駆動させる。これにより、第1組及び第2組の駆動駒31,32の先端部31a,32aによってロータ4を回転方向Rに駆動させつつ、第1組の駆動駒31の先端部31aから第2組の駆動駒32の先端部32aへロータ4が受け渡される。
このとき、Phase8において、双方の駆動駒31,32が、極めて短時間、ロータ4から離間する場合がある。このような場合であっても、ロータ4は、その慣性によりY方向の変位を殆どすることなく、第1組の駆動駒31の先端部31aによって支持されていた位置に留まる。そのため、ロータ4は、Y方向の略一定の位置が維持され、回転方向Rに駆動された状態で、第2組の駆動駒32の先端部32aによりY方向に支持され、回転方向Rへ駆動される。これにより、ロータ4は、Y方向の略一定の位置で支持軸5を中心として回転を継続する。
(Phase9)
電源部10は、図8に示すように、Phase9において、第1端子T1の電圧を-1.0Vに維持し、図7Aに示す第1組の駆動駒31の第1圧電素子61の電極部61aに第1配線11を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase9において、第3端子T3に発生させる電圧を0Vにし、図7Bに示す第1組の駆動駒31の第2圧電素子71に第3配線13を介して供給する電圧を0Vにする。
すると、図11(a)に示すように、Phase9において、第1組の駆動駒31をY方向に駆動する第1圧電素子61の変形が維持され、先端部31aがロータ4から離間した状態が維持される(図12(a)、Phase9参照)。同時に図11(a)に示すように、Phase9において、第2圧電素子71が元の形状に戻り、先端部31aが基部31b及びベース部2に対してX1軸負方向側へ移動する(図12(c)、Phase9参照)。このときの先端部31aの移動量は、Phase8において第2圧電素子7に供給されていた電圧の絶対値に比例する。
電源部10は、図8に示すように、Phase9において、第2端子T2の電圧を1.0Vに維持し、図7Aに示す第2組の駆動駒32の第1圧電素子62の電極部62aに第2配線12を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase9において、第4端子T4に発生させる電圧を0Vにし、図7Bに示す第2組の駆動駒32の第2圧電素子72に第4配線14を介して供給する電圧を0Vにする。
すると、図11(b)に示すように、Phase9において、第2組の駆動駒32をY方向に駆動する第1圧電素子62の変形が維持されて、先端部32aがロータ4に接触した状態が維持される(図12(b)、Phase9参照)。この状態で、図11(b)に示すように、Phase9において、第2圧電素子72が元の形状に戻り、先端部32aが基部32b及びベース部2に対してX2軸正方向側へ移動する(図12(d)、Phase9参照)。このときの先端部32aの移動量は、Phase8において第2圧電素子72に供給されていた電圧の絶対値に比例する。
すなわち、Phase9においては、図11(a)に示すように、第1組の駆動駒31の先端部31aは、Y軸負方向側へ移動してロータ4から離間した状態を維持しつつ、ロータ4の回転方向Rと逆のX1軸負方向側へ移動する。同時に、図11(b)に示すように、第2組の駆動駒32の先端部32aは、ロータ4に当接した状態を維持してロータ4を支持しつつ、ロータ4の回転方向Rに沿うX1軸正方向側に移動してロータ4を回転方向Rへ駆動させる。
(Phase10)
電源部10は、図8に示すように、Phase10において、第1端子T1の電圧を-1.0Vに維持し、図7Aに示す第1組の駆動駒31の第1圧電素子61の電極部61aに第1配線11を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase10において、第3端子T3に-3.0Vの電圧を発生させ、図7Bに示す第1組の駆動駒31の第2圧電素子71に第3配線13を介して電圧を供給する。
すると、図11(a)に示すように、Phase10において、第1組の駆動駒31をY方向に駆動する第1圧電素子61の変形が維持されて、先端部31aがロータ4から離間した状態が維持される(図12(a)、Phase10参照)。この状態で、図11(a)に示すように、Phase10において、第2圧電素子71が厚み滑り変形し、先端部31aが基部31b及びベース部2に対してX1軸負方向側へ移動する(図12(c)、Phase10参照)。このときの先端部31aの移動量は、第2圧電素子71に供給される電圧の絶対値に比例する。
電源部10は、図8に示すように、Phase10において、第2端子T2の電圧を1.0Vに維持し、図7Aに示す第2組の駆動駒32の第1圧電素子62の電極部62aに第2配線12を介して供給する電圧を維持する。また、電源部10は、図8に示すように、Phase10において、第4端子T4に1.0Vの電圧を発生させ、図7Bに示す第2組の駆動駒32の第2圧電素子72に第4配線14を介して電圧を供給する。
すると、図11(b)に示すように、Phase10において、第2組の駆動駒32をY方向に駆動する第1圧電素子62の変形が維持されて、先端部32aがロータ4に接触した状態が維持される(図12(b)、Phase10参照)。この状態で、図11(b)に示すように、Phase10において、第2圧電素子72が厚み滑り変形し、先端部32aが基部32b及びベース部2に対してX2軸正方向側へ移動する(図12(d)、Phase10参照)。このときの移動量は、Phase10で新たに供給された電圧の絶対値に比例する。
すなわち、Phase10においては、図11(a)に示すように、第1組の駆動駒31の先端部31aは、ロータ4から離間した状態を維持しつつ、基部31b及びベース部2に対してX1軸負方向側へさらに移動する。同時に、図11(b)に示すように、第2組の駆動駒32の先端部32aは、ロータ4に当接した状態を維持してロータ4を支持しつつ、ロータ4の回転方向Rに沿うX2軸正方向側に移動してロータ4を回転方向Rへ駆動する。
Phase11以降は、上記のPhase3からPhase10までの動作と同様の動作が繰り返し行われ、ロータ4の回転が継続される。これにより、第1組の駆動駒31の先端部31aと先端部3aと第2組の駆動駒32の先端部32aとによって交互に(順番に)ロータ4のY軸方向の支持及び回転方向Rの駆動がされ、ロータ4が支持軸5回りの回転を継続する。
本実施形態の駆動装置1は、各々の駆動駒3を支持軸5の平行な方向(第2の方向)へ駆動させる第1圧電素子6と、駆動駒3の先端部3aをロータ4の回転方向Rに沿う駆動駒3の幅w3方向(第1の方向)へ駆動させる第2圧電素子7とが別個に独立して設けられている。そのため、それぞれの方向の振動を独立した振動として取り出すことができる。
したがって、駆動駒3によりロータ4を回転させ、ロータ4と駆動駒3とを相対駆動させる際に、従来よりもロータ4を安定して回転させることができる。また、基部3bを挟み込む第1圧電素子6が互いに異なる方向に基部3bを駆動させる場合と比較して損失が発生し難く、エネルギー効率を向上させることができ、駆動装置1の出力を増大させることができる。
また、第1圧電素子6の電極部6aが、ベース部2から露出される露出部6bを有している。したがって、ベース部2に対して電極部6aを備えた第1圧電素子6を組み付ける際に、電極部6aがベース部2に覆われて電気的な接続が困難になることを防止できる。これにより、駆動装置1の組立を容易かつ確実に行うことができ、生産性及び歩留まりを向上させることができる。
また、本実施形態では、電極部6aを通常の矩形状に形成し、ベース部2から露出させる部分を露出部6bとしている。すなわち、電極部6aを特殊な形状に形成する必要がない。また、第1圧電素子6の電極部6aは、第1圧電素子6と一体的に設けられている。このため、電極部6aと第1圧電素子6とを別々に設けてベース部2にそれぞれ組み付ける場合と比較して、工程数を減少させて組立を容易にすることができる。
また、図5A、図5B及び図6に示すように、第1圧電素子6の電極部6aが、ベース部2の保持部2aの支持面2fに対向する面に設けられている。したがって、電極部6aの一部である露出部6bをベース部2から露出させることが可能になる。
また、駆動装置1の組立時には、第1圧電素子6及びその電極部6aのロータ4側の端部の位置が、製造工程上の誤差によって、ベース部2のロータ4側の端面よりも保持部2aの底面2g側にずれる場合がある。
本実施形態では、ベース部2に電極部6aの露出部6bを露出させるための露出形成部として、面取り部2hが設けられている。したがって、組立時に誤差が生じた場合であっても、露出部6bをベース部2から確実に露出させることができる。
また、面取り部2hは、ベース部2のロータ4側の端部の角部に設けられている。したがって、例えば外周側の角部と内周側の角部との間の端面に凹状の切欠き又は肉盗みを設ける場合や、保持部2aの支持面2fの一部に凹状の切欠き又は肉盗みを設ける場合と比較して、ベース部2及び保持部2aの剛性を高くすることができる。これにより、駆動駒3の幅w3方向(第1の方向)と、支持軸5と平行な方向(第2の方向)における振動とをより独立させて取り出すことが可能になる。
また、露出形成部を面取り部2hとすることで、通常の製造工程において容易に形成することが可能になる。したがって、製造工程が複雑化することを防止でき、製造工程数の増加を防ぐことができ、生産性の低下を防止することができる。
また、露出部6bと電源部10とが電気的に接続されているので、電源部10において発生させた電圧を露出部6bを介して電極部6aに印加することができる。また、電極部6aと駆動駒3の基部との間に電圧を印加することで、第1圧電素子6を駆動させることができる。
また、第1圧電素子6が駆動駒3の基部3bを幅w3方向から挟み込み、第1圧電素子6が駆動駒3を幅w3方向と異なる支持軸5に平行な方向へ駆動させるようになっている。また、基部3bを挟み込む一対の第1圧電素子6,6の寸法及び形状が、略等しくなっている。これにより、駆動駒3の幅w3方向の剛性を均等にすることができる。したがって、駆動駒3の基部3bの幅w3方向の振動を抑制することができる。また、全ての第1圧電素子6及び第2圧電素子7を同一の形状及び寸法とすることで、製造を容易にして生産性を向上させることができる。
加えて、ベース部2には、駆動駒3を支持軸5と平行な方向へ駆動可能に保持する保持部2aが設けられている。保持部2aには、駆動駒3の幅w3方向から駆動駒3の基部3bを支持する支持面2fが設けられている。そのため、支持面2fによって第1圧電素子6を支持し、第1圧電素子6を介して駆動駒3の基部3bを幅w3方向から支持することができる。これにより、駆動駒3の幅w3方向の剛性をより高め、駆動駒3の基部3bの幅w3方向の振動を抑制することができる。
ここで、第1圧電素子6は、厚み方向の弾性係数(縦弾性係数)と変形方向の弾性係数(横弾性係数)との比が例えば約3:1程度である。したがって、駆動駒3の幅w3方向の剛性を高め、基部3bの駆動方向の剛性を低くすることができる。これにより、基部3bの幅w3方向の移動を防止して振動を抑制できる。また、基部3bの駆動方向の変位をしやすくすることができる。
また、保持部2aの支持面2fは、図5A及び図5Bに示すように、駆動駒3の支持軸5に平行な方向に傾斜して設けられ、ロータ4から離間して保持部2aの底面2gに近づくほど、支持面2f,2f同士の幅w4が狭くなっている。また、支持面2f,2f同士の幅w4’は、底面2gよりもロータ4側で駆動駒3の基部3bと一対の第1圧電素子6の幅w5よりも狭くなっている。
そのため、駆動駒3の基部3bとそれを挟み込む第1圧電素子6,6をロータ4側から支持軸5に平行な方向に沿って保持部2aの底面2g側へ挿入すると、支持面2fの途中で基部3bと第1圧電素子6は、幅w4方向から支持面2fによって挟み込まれて支持される。これにより、駆動駒3を、支持軸5と平行な方向に位置決めすることができる。また、支持面2fは、駆動駒3のロータ4側への駆動を規制しないので、駆動駒3をロータ4側へ駆動可能に保持することができる。
また、支持面2fに対向する駆動駒3の基部3bの側面3cは、支持面2fと同様に傾斜して支持面2fと略平行に設けられている。そのため、駆動駒3の基部3bと当該基部3bを挟み込む第1圧電素子6,6をロータ4側から支持軸5に平行な方向に沿って保持部2aの底面2g側へ挿入する際に、第1圧電素子6と保持部2aの支持面2fを隙間なく接触させて、第1圧電素子6を支持面2fに圧着することができる。これにより、駆動駒3の基部3bの幅w3方向の振動を抑制することができる。
また、支持面2fの支持軸5と平行な方向に対する傾斜角度αが、2°以上6°以下であることから、駆動駒3の支持軸5と平行な方向における位置決め誤差を許容誤差の範囲に収めることが可能になる。ここで、傾斜角度αが2°よりも小さいと、位置決めの精度が低下するだけでなく製作が困難になる。また傾斜角度αが6°よりも大きいと、駆動駒3の支持軸5に平行な方向への駆動に悪影響が生じる。本実施形態では、傾斜角度αを4°とすることで、位置決め精度、製作性、及び駆動性を良好なものとすることができる。
また、駆動駒3が保持部2aの支持面2fによって位置決めされた中立位置において、駆動駒3の基部3bの底面3dと保持部2aの底面2gとが駆動駒3の基部3bの駆動方向である支持軸5に平行な方向に離間している。したがって、駆動駒3を中立位置からベース部2側へ駆動させることができる。さらに、本実施形態では、駆動駒3を中立位置からベース部2側へ駆動させたときにも、基部3bの底面3dと保持部2aの底面2gとが離間するようになっている。したがって、駆動駒3をベース部2側へ駆動させたときに基部3bの底面3dと保持部2aの底面2gとが衝突することを防止して、駆動駒3の駆動に衝突による悪影響が及ぶことを防止できる。
また、駆動駒3が、ロータ4を支持して回転方向Rに駆動させる先端部3aと、一対の第1圧電素子6に挟み込まれた状態でベース部2の保持部2aに保持された基部3bと、を備えている。さらに、駆動駒3は、先端部3aと基部3bとの間に、先端部3aをロータ4の回転方向Rに沿う保持部2a及び駆動駒3の幅w3方向に駆動する第2圧電素子7を備えている。
そのため、駆動駒3を幅w3方向に駆動することで、ロータ4の下面と駆動駒3の先端部3aとの間に回転方向Rの接線方向の摩擦力が作用し、ロータ4を回転方向Rに駆動することができる。また、第1圧電素子6及び第2圧電素子7をそれぞれ独立して制御することができる。これにより、駆動駒3の先端部3aの支持軸5に沿う方向の駆動と、ロータ4の回転方向Rに沿う方向の駆動とを独立して制御することができる。
また、第1圧電素子6及び第2圧電素子7を同時に作動させ、駆動駒3の先端部3aの支持軸5に沿う方向の駆動と、ロータ4の回転方向Rに沿う方向の駆動とを同時に行うことができる。
したがって、図9~図11に示すように、ロータ4と先端部3aの接触時及び離間時に、駆動駒3の先端部3aをロータ4の回転方向Rに沿って移動させ、ロータ4の回転を妨げることなく、第1組の駆動駒31から第2組の駆動駒32へロータ4の受け渡しを行うことができる。
また、駆動駒3及びその基部3bを挟み込む二対の第1圧電素子6,6を3つ備えた駆動駒3の組が、第1組と第2組の二組構成されている。したがって、各組を異なるタイミングで駆動させることができる。また、各組の駆動駒31,32の先端部31a,32aによって、ロータ4を3点支持することが可能となる。したがって、2点支持や4点以上の支持の場合と比較して、ロータ4の支持を安定して行うことができる。
また、各組の駆動駒31,32は、ロータ4の回転方向Rに均等に配置されている。第1組と第2組の駆動駒31,32が、回転方向Rに交互に順番に配置されている。したがって、ロータ4を各組の駆動駒31,32によってバランスよく支持し、回転方向Rに効率よく駆動することができる。
また、駆動駒3の先端部3aが駆動する方向は、駆動駒3の基部3bが第1圧電素子6及び保持部2aの支持面2fによって挟み込まれる方向と同一の方向となっている。したがって、駆動駒3の先端部3aが送り駆動及び戻り駆動を行った場合に、駆動方向の前後から駆動駒3の基部3bを支持することができる。したがって、駆動駒3が支持軸5に平行な方向からずれることを抑制し、ロータ4の駆動に悪影響が及ぶことを防止できる。
また、電源部10が、第1組及び第2組の駆動駒31,32に位相差を有する電圧を供給することで、各組の駆動駒31,32によってそれぞれロータ4を駆動することができる。
また、電源部10が、各組の第1圧電素子6及び第2圧電素子7に供給する電圧の位相差を180°とすることで、第1組の駆動駒31と第2組の駆動駒32とによって交互に順番にロータ4を駆動させることができる。
また、電源部10が、各組の第1圧電素子6及び第2圧電素子7に、駆動駒3の先端部3aがロータ4との接触、駆動駒3の幅w3方向への送り、ロータ4からの離間、駆動駒3の幅w3方向の戻り、を順次繰り返すように電圧を供給することで、ロータ4の回転駆動を連続的に行うことができる。
また、電源部10は、図8のPhase3,7,14に示すように、第1端子T1に供給する電圧と第2端子T2に供給する電圧をオーバーラップさせている。これにより、第1組の駆動駒31から第2組の駆動駒32へのロータ4の受け渡しを連続的かつスムーズに行うことが可能になる。
また、電源部10は、図8に示すように、駆動駒3の先端部3aに幅w3方向の送り駆動をさせる際に、第3端子T3及び第4端子T4に供給する電圧の増加率(傾き)と、戻り駆動をさせる際の電圧の減少率(傾き)とを、異ならせている。例えば、第3端子T3において、先端部3aを送り駆動させるPhase2~Phase8までの各Phaseで電圧を1.0Vずつ上昇させ、先端部3aを戻り駆動させるPhase9~Phase10までの各Phaseで電圧を3.0Vずつ減少させている。これにより、駆動駒3の先端部3aの送り駆動の時間を戻り駆動の時間よりも長くすることができ、駆動駒3の先端部3aとロータ4との接触時間を長くすることができる。したがって、駆動駒3の動力を、より効率よくロータ4に伝達することが可能になる。
また、電源部10が第1圧電素子6及び第2圧電素子7に供給する電圧の周波数は、第1圧電素子6、第2圧電素子7、駆動駒3、及びベース部2からなる支持駆動部1aの共振振動の振動数と略等しくなっている。そのため、駆動駒3の先端部3aによるロータ4の送り駆動及び戻り駆動の振幅をより大きくすることができる。支持駆動部1aの共振振動の周波数は、ベース部2、圧電素子、駆動駒3の先端部3a及び基部3bの材質を適切に選定することで調整することができる。
また、本実施形態では、図8に示すように、第1端子T1及び第2端子T2から各組の駆動駒31,32の第1圧電素子61,62に供給される電圧の周期と、第3端子T3及び第4端子T4から各組の第2圧電素子71,72に供給される電圧の周期とが等しくなっている。したがって、駆動駒31,32の支持軸5に平行な方向の駆動と、駆動駒31,32の幅w31,w32方向の先端部31a,32aの駆動の振動数が等しくなる。これにより、支持軸5に平行な方向の駆動駒31,32の振幅と、駆動駒31,32の幅w31,w32方向の先端部31a,32aの振幅を最大振幅とすることができる。
また、駆動駒3の先端部3aは、ロータ4の回転方向Rに沿う断面積がロータ4に近づくほど小さくなるように先細状に設けられている。したがって、先端部3aを直方体状の形状に形成する場合と比較して、先端部3aとロータ4との接触面積を減少させ、先端部3aの磨耗による先端部3aの体積変化率を小さくすることができる。これにより、先端部3aの磨耗による先端部3aの重量の変化を小さくすることができ、駆動駒3の共振周波数の変化を小さくすることができる。また、先端部3aを六角柱状の形状とすることで、その他の形状と比較して先端部3aの剛性を高くすることができる。
また、支持軸5と略平行に設けられ駆動駒3の幅w3方向と略垂直に交差するベース部2の側面2cに、溝部2dが形成されている。すなわち、溝部2dは、ベース部2を介して伝播する支持軸5と略平行な方向の振動に対して、略垂直に交差するように設けられている。そのため、溝部2dによって振動を吸収し、ベース部2による振動の伝播を減少させることができる。
また、第1圧電素子6が、ロータ4と溝部2dとの間に設けられている。したがって、ベース部2のロータ4と反対側から溝部2dを越えて伝播する振動を減少させることができる。
また、ベース部2の駆動駒3を保持する保持部2aと反対側の端部が取付部101aに固定され、溝部2dは駆動駒3よりも取付部101aに近い位置に設けられている。そのため、取付部101aの振動がベース部2に伝播した場合であっても、駆動駒3から比較的遠い位置で振動を減少させ、取付部101aの振動が駆動駒3の駆動に悪影響を及ぼすことを防止できる。
また、溝部2dの支持軸5に平行な方向の幅w1は、ベース部2の振動の振幅よりも大きくなっている。そのため、溝部2dの両側のベース部2同士が衝突することを防止できる。
また、溝部2dの支持軸5に平行な方向の幅w1は、ベース部2、駆動駒3、第1圧電素子6、及び第2圧電素子7からなる支持駆動部1aの共振振動の振幅よりも大きくなっている。したがって、支持駆動部1aが共振状態で振動した場合でも、溝部2dの両側のベース部2同士が衝突することを防止できる。
また、溝部2dの深さd1をベース部2の半径の40%以上80%以下とすることで、ベース部2の強度を十分に確保しつつ、十分な振動の伝播の抑制効果を得ることができる。
また、ベース部2と支持軸5との間に間隙2eが形成されているので、ベース部2から支持軸5に伝播する振動を減少させることができる。また、支持軸5からベース部2に伝播する振動を減少させることができる。したがって、駆動駒3及びロータ4の駆動に悪影響が及ぶことを防止できる。
次に、本実施形態の駆動装置1を備えたレンズ鏡筒及びカメラの一例について説明する。本実施形態の交換レンズは、カメラボディとともにカメラシステムを形成するものである。交換レンズは、公知のAF(オートフォーカス)制御に応じて合焦動作を行うAFモードと、撮影者からの手動入力に応じて合焦動作を行うMF(マニュアルフォーカス)モードとが切り替え可能になっている。
図13は、本実施形態におけるカメラ101の構成を模式的に示す概略構成図である。
図13に示すように、カメラ101は、撮像素子108が内蔵されたカメラボディ102と、レンズ107を有するレンズ鏡筒103とを備えている。
レンズ鏡筒103は、カメラボディ102に着脱可能な交換レンズである。レンズ鏡筒103は、レンズ107、カム筒106、駆動装置1等を備えている。駆動装置1は、カメラ101のフォーカス動作時にレンズ107を駆動する駆動源として用いられている。駆動装置1のロータ4から得られた駆動力は、直接、カム筒106に伝えられる。レンズ107は、カム筒106に保持されており、駆動装置1の駆動力により、光軸方向Lに略平行に移動して、焦点調節を行うフォーカスレンズである。
カメラ101の使用時には、レンズ鏡筒103内に設けられたレンズ群(レンズ107を含む)によって、撮像素子108の撮像面に被写体像が結像される。撮像素子108によって、結像された被写体像は、電気信号に変換される。その信号をA/D変換することによって、画像データが得られる。
以上説明したように、本実施形態のカメラ101及びレンズ鏡筒103は、上記の実施形態で説明した駆動装置1を備えている。したがって、従来よりもロータ4を安定的に回転させることができ、出力が向上した駆動装置1によって、カム筒106を直接駆動させることができる。したがって、エネルギーの損失が少なく省エネルギー効果が得られる。また、部品点数の削減が可能になる。
本実施形態では、レンズ鏡筒103は、交換レンズである例を示したが、これに限らず、例えば、カメラボディと一体型のレンズ鏡筒としてもよい。
尚、本発明の態様は上述した実施形態のみに限られるものではなく、本発明の趣旨を逸脱しない範囲で種々変形して実施することができる。例えば、第1圧電素子の電極部は、第1圧電素子と一体的に設けられていなくてもよい。すなわち、電極部と第1圧電素子とを分離させておき、駆動駒を保持部に保持させる際に電極部と第1圧電素子とを接合させてもよい。また、電極部は、ベース部から突出することでベース部から露出される耳片状(タブ状)の露出部を有していてもよい。また、駆動駒の側面に第1圧電素子を接合した状態で、駆動駒を保持部に保持させる際に、予め第1圧電素子の寸法並びに電極部の寸法及びこれらの貼り付け位置を、電極部がベース部のロータ側の端部、又はベース部の側面から突出するように調整し、電極部がベース部から突出して露出された部分を露出部としてもよい。
また、電極部の露出部を露出させる露出形成部は、上記の実施形態で説明した面取り部に限定されない。例えば、上述の面取り部と同様にベース部の端部の角部に露出形成部を設ける場合に、保持部の両側の部分の角部のみに面取り部、切欠き部又は肉盗み部を設けて露出部を露出させてもよい。また、ベース部のロータ側の端部に露出形成部を設ける場合に、外周側の角部と内周側の角部の間に溝状の面取り部、切欠き部又は肉盗み部を設けてもよい。また、ベース部のロータ側の端部と保持部の底面との間のベース部の側面に面取り部、切欠き部又は肉盗み部を設けて露出部を露出させてもよい。
また、上記の実施形態では、電極部の露出部と電極面とを導通させる導電性材料として導電性接着剤を用いる場合について説明したが、導電性材料は導電性接着剤に限定されない。その他の導電性材料としては、例えば、導電ペースト、半田、ろう材等を用いることができる。
また、上記の実施形態では、第1圧電素子及び第2圧電素子が厚み滑り変形する場合について説明したが、これらは厚み方向に変形するものであってもよい。この場合、第1圧電素子によって駆動駒は保持部の幅方向(第1の方向)に移動し、第2圧電素子によって駆動駒の先端部は回転軸に平行な方向(第2の方向)に移動する。
また、ベース部は、支持軸を囲むように設けられていれば複数に分割されていてもよく、支持軸を完全に囲んでいなくてもよい。例えば、ベース部は、支持軸を囲む円周上の半分に偏って配置されていてもよく、支持軸を両側から挟みこむような配置であってもよい。
また、上述の実施形態では、駆動駒を支持軸と平行な方向へ駆動する第1圧電素子が駆動駒を挟み込むように一対設けられている場合について説明したが、第1圧電素子は駆動駒の一方の側面のみに設けられていてもよい。また、厚み方向への変位をする圧電素子を第1圧電素子として用い、ベース部の保持部の底面と駆動駒の基部の底面との間に第1圧電素子を配置するようにしてもよい。この場合には、ベース部に設けられた保持部の支持面によってロータの回転方向に沿う保持部の幅方向の両側から圧電素子を介すことなく基部を直接支持する。そして、基部を支持軸と平行な方向へスライド可能に保持するガイド部として支持面を機能させるようにしてもよい。
また、上述の実施形態では、第1圧電素子及び第2圧電素子を備える駆動駒の組を二組備える場合について説明したが、駆動駒の組は三組以上であってもよい。また、駆動駒の組が備える駆動駒の数は、1つ、2つ、若しくは4つ以上であってもよい。例えば、上述の実施形態において、ベース部の対角に配置された配置された2つの駆動駒を1組として、駆動駒の組を3組構成してもよい。この場合には、各組の電圧の位相差を例えば120度とすることができる。これにより、常に2組の駆動駒によってロータを支持・回転させることができる。駆動駒の各組の電圧の位相差は、360度を組数で除した値(すなわち二組の場合は180度、三組の場合は120度)とすればよい。
また、上述の実施形態では、第1圧電素子が駆動駒の基部を挟み込む方向(第1の方向)と第2圧電素子が駆動駒の先端部を駆動する方向(第3の方向)とが同一の場合について説明したが、これらを異ならせてもよい。例えば、第3の方向を駆動駒の幅w3方向と交差しかつロータの回転方向に沿う方向とすることで、ロータを回転させやすくしてもよい。
また、ベース部の支持面は、支持軸と平行な方向(第2の方向)に対して傾斜していなくてもよい。例えば、図14Aに示すように、保持部に第1圧電素子の保持部の底面側の端部を係止する突起状の係止部を設けてもよい。また、図14Bに示すように、第1圧電素子の保持部の底面側の端部を基部の底面よりも突出させて位置決め部として機能させ、位置決め部を保持部の底面に突き当てることで位置決めをしてもよい。
また、ベース部と支持軸との間の間隙は、ベース部の強度確保の観点から溝部の保持部側の縁まで形成するようにしてもよい。
また、電源部の各端子から第1圧電素子及び第2圧電素子へ供給する電圧を正弦波や正弦波状の電圧波形としてもよい。
まず、上述の実施形態と同様に駆動駒の組が第1組と第2組の二組構成され、電源部の第1端子と第2端子に発生する正弦波の電圧波形の位相差が180°であり、第3端子と第4端子に発生する正弦波の電圧波形の位相差が180°である場合を例に図15を用いて説明する。
図12(a)~図12(d)と同様に、図15(a)は、第1組の駆動駒の先端部のY方向の変位を示している。図15(b)は、第2組の駆動駒のY方向の変位を示している。また、図15(c)は、第1組の駆動駒のX1方向の変位を示している。図15(d)は、第2組のX2方向の変位を示している(図9~図11参照)。
電源部の第1端子と第2端子に発生する正弦波の電圧波形の位相差が180°である場合、図15(a)及び図15(b)に示すように、Y軸方向に駆動する第1組及び第2組の駆動駒の先端部は、180°の位相差を有する正弦波状の軌跡を描くようになる。このとき、第1組の駆動駒の先端部は、図15(a)に太線で示すように、Y軸方向の変位が接触位置y1を越えるとロータと接触する(図9~図11参照)。また、図15(b)に太線で示すように、第2組の駆動駒の先端部も同様にロータと接触する。
ここで、図15(a)に示す第1組の駆動駒の軌跡と、図15(b)第2組の駆動駒の軌跡とは、180°の位相差を有している。そのため、第1組の駆動駒の先端部と第2組の駆動駒の先端部とが、ロータに交互に接触してロータを支持する(図9~図11参照)。このとき、上述の実施形態と同様に、双方の駆動駒の先端部がロータから離間する期間が存在する。しかし、上述の実施形態と同様、その間に、ロータは、その慣性によりY方向へは殆ど変位しない。
同様に、電源部の第2端子と第3端子に発生する正弦波の電圧波形の位相差が180°である場合、図15(c)及び図15(d)に示すように、X1軸方向及びX2軸方向へ駆動する第1組及び第2組の駆動駒の先端部は、正弦波状の軌跡を描くようになる(図9~図11参照)。
ここで、図15(c)に太線で示すように、第1組の駆動駒の先端部は、ロータと接触している間(図15(a)に示す太線部分の間)に、ロータの回転方向に沿うX1軸正方向に移動する(図9~図11参照)。また、図15(d)に太線で示すように、第2組の駆動駒の先端部も同様に、ロータと接触している間(図15(b)に示す太線部分の間)に、ロータの回転方向に沿うX2軸正方向に移動する。
したがって、上述の実施形態と同様に、ロータは第1組の駆動駒と第2組の駆動駒とによって交互に回転方向へ駆動される(図9~図11参照)。
次に、駆動駒の組が第1組~第3組の三組構成され、電源部の各端子に120°の位相差を有する正弦波又は正弦波状の電圧波形を発生させる場合について、図16を用いて説明する。この場合、電源部として、上述の第1端子~第4端子に加え、第3組の駆動駒の第1圧電素子と第2圧電素子にそれぞれ電圧を供給する第5端子と第6端子を備えたものを用いる。また、第1組の駆動駒のX1方向及び第2組の駆動駒のX2方向(図9~図11参照)と同様に、支持軸に垂直でロータの回転方向に沿う第3組の駆動駒の幅方向(保持部の幅方向)をX3方向とする。
図16(a)は、第1組~第3組の駆動駒の先端部のY方向の変位を示している。図16(b)は、第1組~第3組の駆動駒の先端部のX1~X3方向の変位を示している。図16(a)及び図16(b)では、第1組の駆動駒の先端部の軌跡を実線、第2組の駆動駒の先端部の軌跡を破線、第3組の駆動駒の軌跡を一点鎖線で示している。
電源部が各組の第1圧電素子に供給する電圧波形が120°の位相差を有する場合、図16(a)に示すように、Y軸方向に駆動する各組の駆動駒の先端部は、120°の位相差を有する正弦波状の軌道を描くようになる。このとき、各組の駆動駒の先端部は、図16(a)に太線で示すように、Y軸方向の変位が接触位置y1を越えるとロータと接触する(図9~図11参照)。
ここで、図16(a)に示す各組の駆動駒の軌跡は、120°の位相差を有している。そのため、各組の駆動駒の先端部がロータに順番に接触してロータを支持する(図9~図11参照)。このとき、上述の実施形態と同様に、各組の駆動駒の先端部がロータから離間する期間が存在する。しかし、上述の実施形態と同様、その間に、ロータは、その慣性によりY方向へは殆ど変位しない。
同様に、電源部が各組の第2圧電素子に供給する電圧波形が120°の位相差を有する場合、図15(b)に示すように、X1~X3軸方向へ駆動する各組の駆動駒の先端部は、正弦波状の軌道を描くようになる(図9~図11参照)。
ここで、図16(b)に太線で示すように、各組の駆動駒の先端部は、ロータと接触している間(図16(a)に示す太線部分の間)に、ロータの回転方向に沿うX1~X3軸正方向に移動する(図9~図11参照)。
したがって、上述の実施形態と同様に、ロータは各組の駆動駒によって順番に回転方向へ駆動される(図9~図11参照)。
(2)第2の実施形態
本発明の第2の実施形態にかかる駆動装置を、図面を参照しながら以下に説明する。本実施形態の駆動装置201は、例えば駆動駒等の第1部材に対してロータ等の第2部材を相対的に変位させる相対駆動を行うことで、カメラのレンズ鏡筒等の光学機器や電子機器を駆動するためのものである。
図17は本実施形態の駆動装置201の正面図であり、図18はその断面図である。
図17及び図18に示すように、駆動装置201は、複数の保持部202aが設けられたベース部(ベース部材)202と、保持部202aに保持された駆動駒(第1部材)203と、駆動駒203に隣接して配置されたロータ(第2部材)204と、ベース部202に挿通された支持軸205と、を備えている。
ロータ204の外周面には、例えばカメラのレンズ鏡筒等を駆動するための歯車204aが形成されている。ロータ204のベース部202側の被支持面204bは、複数の駆動駒203によって支持されている。ロータ204は、ベアリング204eを介して支持軸205によって軸支され、支持軸205を回転軸として回転自在に設けられている。すなわち、支持軸205は、ロータ204の回転軸R1に沿って設けられている。
ベース部202は、導電性を有する弾性体であり、例えばステンレス鋼等の金属材料により中空円筒状に形成され、支持軸205が挿通されることで、支持軸205を囲むように設けられている。ベース部202の一方の端部は、例えば不図示のボルト等により取付部301aに固定されている。ベース部202の取付部301aに対向する面の中央部には、凹部202bが形成されている。凹部202bには、支持軸205の基端に形成された拡径部205aが挿入(嵌入)されている。この状態でベース部202が取付部301aに固定されることで、支持軸205がベース部202及び取付部301aに固定されている。
ベース部202の他方の端部には、凹状の保持部202aが、ベース部202の周方向、すなわちロータ204の回転方向Rに複数設けられている。保持部202aは、駆動駒203を支持軸205に垂直でロータ204の回転方向Rに沿う方向(第1の方向)の両側から支持するとともに、駆動駒203を支持軸205に平行な方向(第2の方向)に駆動可能に保持している。
図18に示すように、ベース部202の側面202cは、支持軸205と略平行に設けられている。側面202cの保持部202aと取付部301a側の端部との間には、取付部301aから保持部202aへの振動の伝達を抑制する振動抑制部としての溝部202dが形成されている。すなわち、溝部202dは、支持軸205に略垂直でかつロータ204の回転方向Rに沿う方向(第1の方向)と交差するベース部202の側面202cに設けられている。溝部202dは、ベース部202の周方向に連続的に設けられ、保持部202aと取付部301a側の端部との中間よりも取付部301a側の端部に近い位置に設けられている。
溝部202dの深さd201は、例えばベース部202の半径r201の40%以上かつ80%以下の範囲である。上記数値は一例であってこれに限定されない。溝部202dの深さd201は、例えば、ベース部202の半径r201の10,20,30,40,50,60,70,80,又は90%にできる。また、支持軸205に平行な方向(第2の方向)の溝部202dの幅w201は、ベース部202の振動の振幅よりも大きく、後述する第1圧電素子206、第2圧電素子(第2の圧電素子)207、駆動駒203、及びベース部202からなる支持駆動部(構造部)201aの共振振動の振幅よりも大きくなるように形成されている。一例において、溝部202dの幅w201は、ベース部202の半径よりも短くできる。
図18に示すように、ベース部202と支持軸205との間には、取付部301aから保持部202aへの振動を抑制するための間隙(振動抑制部)202eが設けられている。間隙202eは、支持軸205と平行な方向に、ベース部202の保持部202a側の端部から溝部202dの取付部301a側の縁と同様の位置まで設けられている。また、間隙202eの幅w202は、溝部202dの幅w201と同様に、ベース部202の振動の振幅よりも大きく、後述する支持駆動部201aの共振振動の振幅よりも大きくなるように形成されている。
ベース部202の表面には、絶縁膜202gが成膜されて絶縁処理が施されている。絶縁膜202gは、例えばアクリル系やエポキシ系などの絶縁材料をベース部202の表面に塗布することにより成膜される。絶縁膜202gは、溝部202dよりも駆動駒203側のベース部202の側面、保持部202a、及び間隙202e側の面に亘って連続的に成膜されている。ベース部202の絶縁膜202gが形成された部分の絶縁抵抗値は、沿面測定値でおよそ数MΩとなっている。
絶縁膜202gは、例えば鉛筆硬度2H以上の高い硬度を有し、ダンパー成分が殆どないものが用いられる。絶縁膜202gの耐電圧は、例えば約200VDC以上であることが望ましい。絶縁膜202gの膜厚は、上記の耐電圧が維持できる範囲で可能な限り薄く形成する。膜厚は、例えば約10μm以上20μm以下であることが望ましい。また、膜厚のばらつきは、平均膜厚±50%以下とし、望ましくは平均膜厚±30%以下にする。
本実施形態の絶縁膜202gは、例えばシリカ系組成を含む絶縁材料により形成され、硬度は3H以上、膜厚は約15μm±3μ程度、耐電圧は約270VDC以上となっている。
図19は、支持軸205に平行でロータ204の回転方向Rに沿う断面における駆動駒203及び保持部202aのロータ204の拡大断面図である。
図19に示すように、絶縁膜202gは、保持部202aは駆動駒203を支持する支持面202f,202fを含む保持部202aの全体に均一な膜厚で形成されている。第1圧電素子206は、導電性を有する接着剤により駆動駒203の側面203c及び絶縁膜202gが形成された保持部202aの支持面202fに固定されている。
絶縁膜202gと第1圧電素子206とを接着する接着剤は、絶縁膜202gと同系の材料を含むものを用いることが望ましい。例えば、絶縁膜202gとしてアクリル系の材料を含むものを用いた場合には、アクリル系の材料を含む接着剤が用いられる。また、絶縁膜202gとしてエポキシ系の材料を含むものを用いた場合には、エポキシ系の材料を含む接着剤が用いられる。
本実施形態では、全ての第1圧電素子206とベース部202との間に絶縁膜202gが設けられている。また、第1圧電素子206は、絶縁膜202gと接する面に電極206aが設けられている。
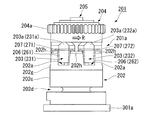
図20Aは図17に示す駆動装置201の支持駆動部201aの斜視図であり、図20Bはその平面図である。
図20A及び図20Bに示すように、駆動駒203は、断面が山形の六角柱形状を有する先端部203aと略直方体形状を有する基部203bと、を有している。先端部203aは、例えばステンレス鋼等により形成されている。基部203bは、例えば軽金属合金等により形成され、双方とも導電性を有している。基部203bは保持部202aによって支持軸205と平行な方向に駆動可能に支持され、先端部203aは保持部202aから突出してロータ204を支持するようになっている。先端部203aは、ロータ204に接触する上面の面積が基部203b側の底面の面積よりも小さくなる先細状の形状に設けられている。
図20Bに示すように、駆動駒203の幅w203方向(第1の方向)には、駆動駒203の基部203bを幅w203方向の両側から挟みこむ一対の第1圧電素子206,206が二対設けられている。駆動駒203の幅w203方向は、支持軸205に垂直でロータ204の回転方向Rに沿う方向であって、ベース部202の平面視における中心線CLと略垂直な方向である。第1圧電素子206は、保持部202aの深さd202方向に沿って延びる細長い長方形状の形状に形成され、基部203bと保持部202aとの間に挟持されている。これにより、第1圧電素子206は、ベース部202に設けられた溝部202d(図17、図18参照)とロータ204との間に配置されている。
第1圧電素子206は、例えば導電性の接着剤により駆動駒203の基部203bと絶縁膜202gが成膜された保持部202aとに接着されている。また、ベース部202の中心を通る中心線CLと略平行な駆動駒203の奥行p201方向に配置された2つの第1圧電素子206,206は、互いに略平行になっている。各々の第1圧電素子206の形状及び寸法は、全て略等しくなっている。
図20Aに示すように、駆動駒203の基部203bと先端部203aとの間には、一対の第2圧電素子207,207が、互いに略平行に設けられている。第2圧電素子207は、駆動駒203の幅w203方向と略平行に延びる細長い長方形状に形成されている。第2圧電素子207は、先端部203aの底面と基部203bの上面との間に挟持され、例えば導電性の接着剤により先端部203aの底面と基部203bの上面とに接着されている。各々の第2圧電素子207の形状及び寸法は、全て略等しくなっている。
第1圧電素子206及び第2圧電素子207は、例えばチタン酸ジルコン酸鉛(PZT)により形成され、その振動モードは厚み滑り振動である。すなわち、第1圧電素子206は、駆動駒203を、支持軸205と略平行な保持部202aの深さd202方向に、ベース部202に対して相対的に駆動させる。第2圧電素子207は、駆動駒203の先端部203aを駆動駒203の幅w203方向(第3の方向)に、基部203b及びベース部202に対して相対的に駆動させる。すなわち、本実施形態では、第1圧電素子206が駆動駒203を挟み込む方向(第1の方向)と、第2圧電素子207が駆動駒203の先端部203aを駆動させる方向(第3の方向)とが略等しくなっている。
これら複数の第1圧電素子206、第2圧電素子207、駆動駒203、及びベース部202により、ロータ204を支持し、かつロータ204を駆動駒203及びベース部202と相対的に駆動させる支持駆動部201aが構成されている。
図20Aに示すように、保持部202aは、ベース部202の端部に設けられ、ベース部202に王冠状の凹凸を形成している。図20Bに示すように、保持部202aは、ベース部202の周方向の略60°毎に均等に形成されている。保持部202aは、平面視でベース部202の中心を通る中心線CLと略平行に設けられた一対の支持面202f,202fを備えている。支持面202fは、駆動駒203の基部203bを、ベース部202の中心線CLと略垂直な保持部202aの幅w204方向(第1の方向)の両側から一対の第1圧電素子206,206を介して挟み込むように保持している。
本実施形態の駆動駒203は、先端部203aと基部203bとの間に一対の第2圧電素子207,207を備え、基部203bの側面に第1圧電素子206,206を二対備えている。駆動装置201は、この駆動駒203及び二対の第1圧電素子206を3つ備えた駆動駒203の組を、第1組及び第2組の二組備えている。第1組の駆動駒231と第2組の駆動駒232とは同一の円周上に配置されている。また、各々の組の駆動駒231,232は、ロータ204の回転方向Rにそれぞれ均等に配置され、異なる組の駆動駒231,232が回転方向Rに交互に(順番に)配置されている。
図21Aは第1圧電素子206の模式的な配線図であり、図21Bは第2圧電素子207の模式的な配線図である。
図21A及び図21Bに示すように、本実施形態の駆動装置201は、第1圧電素子206の電極206a及び第2圧電素子207の電極(図示略)の各々に電圧を供給する電源部210を備えている。電源部210は、図20A及び図20Bに示す第1組及び第2組のそれぞれの駆動駒231,232の先端部231a,232aが、順次、図17及び図18に示すロータ204との接触、ロータ204の回転方向Rへの送り、ロータ204からの離間、ロータ204の回転方向Rと逆方向の戻り、を繰り返すように第1圧電素子206及び第2圧電素子207に電圧を供給する。
図21Aに示すように、第1組の駆動駒231の各々が備える第1圧電素子261の第1電極261aは、第1配線211を介して電源部210の第1端子T1に接続されている。第2組の駆動駒232の各々が備える第1圧電素子262の第1電極262aは、第2配線212を介して電源部210の第2端子T2に接続されている。
図21Bに示すように、第1組の駆動駒231の各々が備える第2圧電素子271の電極は、駆動駒231の先端部231aに接続された第3配線213を介して電源部210の第3端子T3に接続されている。第2組の駆動駒232の各々が備える第2圧電素子272の電極は、駆動駒232の先端部232aに接続された第4配線214を介して電源部210の第4端子T4に接続されている。
また、図21A及び図21Bにおいて図示は省略するが、駆動駒231,232の基部231b,232bは、接地されている。
以上の構成により、第1圧電素子206の電極206aと駆動駒203の基部203bとの間には、第1圧電素子206を駆動させる所定の駆動電圧が印加される。また、駆動駒203の先端部203aと基部203bとの間には、第2圧電素子207を駆動させる所定の駆動電圧が印加される。
図22は、電源部210が各端子T1,T2,T3,T4に発生させる電圧のタイミングチャートの一例である。
図22に示すように、電源部210は第1端子T1にPhase1~Phase2の間は-1.0Vの電圧を発生させ、Phase3~Phase7の5Phaseは1.0Vの電圧を発生させ、Phase8~Phase10の3Phaseは-1.0Vの電圧を発生させる。以降のPhaseでは、1.0Vの電圧を5Phase発生させ、-1.0Vの電圧を3Phase発生させることを繰り返す。すなわち、電源部210は、第1端子に8Phaseを一周期とする電圧を発生させる。
電源部210は、第2端子T2に、第1端子T1に発生させる電圧と180°の位相差を有し、第1端子T1に発生させる電圧と同様の8Phaseを一周期とする電圧を発生させる。すなわち、第1端子に発生する電圧と、第2端子に発生する電圧とは、半周期分の4Phaseの位相差を有している。
電源部210は、Phase1において第3端子T3に発生させる電圧を0Vに維持し、Phase2において-3.0Vの電圧を発生させ、Phase3~Phase8までの各Phaseにおいて電圧を1.0Vずつ増加させる。以降のPhaseでは、このPhase1~Phase8の電圧の発生パターンを繰り返す。すなわち、電源部210は、第3端子T3に8Phaseを一周期とする電圧を発生させる。
電源部210は、第4端子T4に、第3端子T3に発生させる電圧と180°の位相差を有し、第3端子T3に発生させる電圧と同様の8Phaseを一周期とする電圧を発生させる。すなわち、第3端子に発生する電圧と、第4端子に発生する電圧とは、半周期分の4Phaseの位相差を有している。
本実施形態では、電源部210が第1圧電素子206及び第2圧電素子207に供給する電圧の周波数は、第1圧電素子206、第2圧電素子207、駆動駒203、及びベース部202からなる支持駆動部(構造部)201aの共振振動の振動数と略等しくなっている。
次に、本実施形態の駆動装置201の作用について、図23~図26を用いて説明する。
図23~図25は、第1組と第2組の駆動駒231,232の動作とロータ204の動作を示す拡大正面図である。
図26は、第1組及び第2組の駆動駒231,232の先端部231a,232aの各軸方向の変位と時間tの関係を示すグラフである。図26(a)及び図26(b)において、Y軸方向におけるロータ204との接触位置y1は、破線で表されている。
図23(a)~図25(a)では、ロータ204の回転方向R(図20B参照)に沿う第1組の駆動駒231の幅w231方向(第1の方向)をX1方向、支持軸205(図18参照)に平行な方向(第2の方向)をY方向とする直交座標系を用いて説明する。図23(b)~図25(b)では、ロータ204の回転方向Rに沿う第2組の駆動駒232の幅w232方向(第1の方向)をX2方向、支持軸205に平行な方向(第2の方向)をY方向とする直交座標系を用いて説明する。
(Phase0)
電源部210は、図22に示すように、Phase0において、各端子T1,T2,T3,T4に電圧を発生させず(0V)、図21A及び図21Bに示す第1圧電素子206及び第2圧電素子207に0Vの電圧を供給している(電圧を供給していない)状態である。
図23(a)及び図23(b)に示すように、Phase0において、第1組の駆動駒231と第2組の駆動駒232は、それぞれ先端部231a,232aの上面がロータ204に接した状態で静止している。ロータ204は、駆動駒231,232の先端部231a,232aに支持された状態で静止している。
(Phase1)
電源部210は、図22に示すように、Phase1において、第1端子T1に-1.0Vの電圧を発生させ、図21Aに示す第1組の駆動駒231の第1圧電素子261の電極部261aに、第1配線211を介して電圧を供給する。また、電源部210は、図22に示すように、Phase1において、第3端子T3の電圧を0Vに維持し、図21Bに示す第1組の駆動駒231の第2圧電素子271に第3配線213を介して0Vの電圧を供給する。
すると、図23(a)に示すように、Phase1において、第1組の駆動駒231を駆動する第1圧電素子261が厚み滑り変形し、駆動駒231の基部231bを保持部22aの支持面22fに対してY方向のベース部202側(Y軸負方向側)へ移動させる(図26(a)、Phase1参照)。また、図23(a)に示すように、Phase1において、第2圧電素子271は変形せず、先端部231aはX1方向へは移動しない(図26(c)、Phase1参照)。これにより、駆動駒231の先端部231aがY軸負方向側へ移動し、ロータ204から離間する。
電源部210は、図22に示すように、Phase1において、第2端子T2に1.0Vの電圧を発生させ、図21Aに示す第2組の駆動駒232の第1圧電素子262の電極部262aに第2配線212を介して電圧を供給する。また、電源部210は、図22に示すように、Phase1において、第4端子T4の電圧を0Vに維持し、図21Bに示す第2組の駆動駒232の第2圧電素子272には第4配線214を介して0Vの電圧を供給する。
すると、図23(b)に示すように、Phase1において、第2組の駆動駒232を駆動する第1圧電素子262が厚み滑り変形し、駆動駒232の基部232bを保持部202aの支持面202fに対してY方向のロータ204側(Y軸正方向側)へ移動させる(図26(b)、Phase1参照)。また、図21Bに示すように、Phase1において、第2圧電素子272は変形せず、先端部232aはX2方向へは移動しない(図26(d)、Phase1参照)。これにより、駆動駒232がY軸正方向側へ移動して、先端部232aがロータ204をY軸正方向側へ押し上げる。
すなわち、Phase1においては、図23(a)に示すように、第1組の駆動駒231の先端部231aは、Y軸負方向側へ移動してロータ204から離間する。同時に、図23(b)に示すように、第2組の駆動駒232の先端部232aは、ロータ204に当接してロータ204を支持しつつ、ロータ204をY軸正方向側へ押し上げる。
(Phase2)
電源部210は、図22に示すように、Phase2において、第1端子T1の電圧を-1.0Vに維持し、図21Aに示す第1組の駆動駒231の第1圧電素子261の電極部261aに第1配線211を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase2において、第3端子T3に-3.0Vの電圧を発生させ、図21Bに示す第1組の駆動駒231の第2圧電素子271に第3配線213を介して電圧を供給する。
すると、図23(a)に示すように、Phase2において、第1組の駆動駒231をY方向に駆動する第1圧電素子261の変形が維持されて、先端部231aがロータ204から離間した状態が維持される(図26(a)、Phase2参照)。この状態で、図23(a)に示すように、Phase2において、第2圧電素子271が厚み滑り変形し、先端部231aが基部231b及びベース部202に対してX1軸負方向側へ移動する(図26(c)参照)。このときの先端部231aの移動量は、第2圧電素子271に供給される電圧の絶対値に比例する。
電源部210は、図22に示すように、Phase2において、第2端子T2の電圧を1.0Vに維持し、図21Aに示す第2組の駆動駒232の第1圧電素子262の電極部262aに第2配線212を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase2において、第4端子T4に1.0Vの電圧を発生させ、図21Bに示す第2組の駆動駒232の第2圧電素子272に第4配線214を介して電圧を供給する。
すると、図23(b)に示すように、Phase2において、第2組の駆動駒232をY方向に駆動する第1圧電素子262の変形が維持されて、先端部232aがロータ204に接触した状態が維持される(図26(b)、Phase2参照)。この状態で、図23(b)に示すように、Phase2において、第2圧電素子272が厚み滑り変形し、先端部232aが基部232b及びベース部202に対してX2軸正方向側へ移動する(図26(d)、Phase2参照)。このときの先端部232aの移動量は、電圧の絶対値に比例するため、第1組の先端部231aのX1軸負方向側への移動量と比較して小さくなる。
すなわち、Phase2においては、図23(b)に示すように、第2組の駆動駒232の先端部232aのX2軸正方向側への移動により、先端部232aの上面からロータ204の下面(非接触面204b)に摩擦力が作用する。ここで、第2組の駆動駒232は、図20A及び図20Bに示すように、ロータ204の回転方向Rに沿ってベース部202の周方向に配置される。先端部232aは、ロータ204の回転方向Rに沿う駆動駒232の幅w232方向(X2方向)に変位する。そのため、ロータ204は、駆動駒232の先端部232aによって回転方向Rに駆動され、図17及び図18に示す支持軸205を中心とする回転を開始する。
(Phase3)
電源部210は、図22に示すように、Phase3において、第1端子T1に正負が逆転した1.0Vの電圧を発生させ、図21Aに示す第1組の駆動駒231の第1圧電素子261の電極部261aに第1配線211を介して電圧を供給する。また、電源部210は、図22に示すように、Phase3において、第3端子T3に-2.0Vの電圧を発生させ、図21Bに示す第1組の駆動駒231の第2圧電素子271に第3配線213を介して電圧を供給する。
すると、図23(a)に示すように、Phase3において、第1組の駆動駒231を駆動する第1圧電素子261が逆方向に厚み滑り変形し、駆動駒231の基部231bをY軸正方向側へ移動させる(図26(a)、Phase3参照)。同時に、図23(a)に示すように、Phase3において、第2圧電素子271のX1軸負方向側への変形量が減少し、先端部231aが基部231b及びベース部202に対してX1軸正方向側へ移動する(図26(c)、Phase3参照)。このときの移動量は、Phase3で新たに供給された-2.0VとPhase2で供給されていた-3.0Vとの電圧の差に比例する。
電源部210は、図22に示すように、Phase3において、第2端子T2の電圧を維持し、図21Aに示す第2組の駆動駒232の第1圧電素子262の電極部262aに第2配線212を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase3において、第4端子T4に2.0Vの電圧を発生させ、図21Bに示す第2組の駆動駒232の第2圧電素子272に第4配線214を介して電圧を供給する。
すると、図23(b)に示すように、Phase3において、第2組の駆動駒232を駆動する第1圧電素子262の変形が維持されて、先端部232aがロータ204に接触した状態が維持される(図26(b)、Phase3参照)。この状態で、図23(b)に示すように、Phase3において、第2圧電素子272が厚み滑り変形し、先端部232aが基部232b及びベース部202に対してX2軸正方向側へ移動する(図26(d)、Phase3参照)。このときの移動量は、Phase3で新たに供給された2.0VとPhase2で供給されていた1.0Vとの電圧の差の絶対値に比例する。
すなわち、Phase3においては、図23(a)に示すように、第1組の駆動駒231の先端部231aは、ロータ204の回転方向Rに沿うX1軸正方向側へ移動しながらY軸正方向側へ移動してロータ204に接近して当接する。同時に、図23(b)に示すように、第2組の駆動駒232の先端部232aは、ロータ204に当接してロータ204を支持しつつ、ロータ204を回転方向Rへ駆動する。
(Phase4)
電源部210は、図22に示すように、Phase4において、第1端子T1の電圧を1.0Vに維持し、図21Aに示す第1組の駆動駒231の第1圧電素子261の電極部261aに第1配線211を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase4において、第3端子T3に-1.0Vの電圧を発生させ、図21Bに示す第1組の駆動駒231の第2圧電素子271に第3配線213を介して電圧を供給する。
すると、図24(a)に示すように、Phase4において、第1組の駆動駒231をY軸正方向側に駆動する第1圧電素子261の変形が維持されて、先端部231aがロータ204に当接した状態が維持される(図26(a)、Phase4参照)。同時に、図24(a)に示すように、Phase4において、第2圧電素子271のX1軸負方向側への変形量が減少し、先端部231aが基部231b及びベース部202に対してX1軸正方向側へ移動する(図26(c)、Phase4参照)。このときの移動量は、Phase4で新たに供給された-1.0VとPhase3で供給されていた-2.0Vとの電圧の差の絶対値に比例する。
電源部210は、図22に示すように、Phase4において、第2端子T2に正負が逆転した-1.0Vの電圧を発生させ、図21Aに示す第2組の駆動駒232の第1圧電素子262の電極部262aに第2配線212を介して電圧を供給する。また、電源部210は、図22に示すように、Phase4において、第4端子T4に3.0Vの電圧を発生させ、図21Bに示す第2組の駆動駒232の第2圧電素子272に第4配線214を介して電圧を供給する。
すると、図24(b)に示すように、Phase4において、第2組の駆動駒232を駆動する第1圧電素子262が逆方向に厚み滑り変形し、駆動駒232の基部232bをY軸負方向側へ移動させる(図26(b)、Phase4参照)。同時に、図24(b)に示すように、Phase4において、第2圧電素子272のX2軸正方向側への変形量が増加し、先端部232aが基部232b及びベース部202に対してX2軸正方向側へ移動する(図26(d)、Phase4参照)。このときの移動量は、Phase4で新たに供給された3.0VとPhase2で供給されていた2.0Vとの電圧の差の絶対値に比例する。
すなわち、Phase4においては、図24(a)に示すように、第1組の駆動駒231の先端部231aは、ロータ204に当接した状態でロータ204の回転方向Rに沿うX1軸正方向側に移動し、ロータ204を支持して回転方向Rへ駆動させる。同時に、図24(b)に示すように、第2組の駆動駒232の先端部232aは、ロータ204の回転方向Rへ沿うX2軸正方向側へ移動しながら、Y軸負方向側へ移動してロータ204から離間する。これにより、第1組及び第2組の駆動駒231,232の先端部231a,232aによってロータ204を回転方向Rに駆動させつつ、第2組の駆動駒232の先端部232aから第1組の駆動駒231の先端部231aへロータ204が受け渡される。
このとき、Phase4において、双方の駆動駒231,232が、極めて短時間、ロータ204から離間する場合がある。このような場合であっても、ロータ204は、その慣性によりY方向の変位を殆どすることなく、第2組の駆動駒232の先端部232aによって支持されていた位置に留まる。そのため、ロータ204は、Y方向の略一定の位置が維持され、回転方向Rに駆動された状態で、第1組の駆動駒231の先端部231aによりY方向に支持され、回転方向Rへ駆動される。これにより、ロータ204は、Y方向の略一定の位置で支持軸205を中心として回転を継続する。
(Phase5)
電源部210は、図22に示すように、Phase5において、第1端子T1の電圧を1.0Vに維持し、図21Aに示す第1組の駆動駒231の第1圧電素子261の電極部261aに第1配線211を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase5において、第3端子T3に発生させる電圧を0Vにし、図21Bに示す第1組の駆動駒231の第2圧電素子271に第3配線213を介して供給する電圧を0Vにする。
すると、図24(a)に示すように、Phase5において、第1組の駆動駒231をY方向に駆動する第1圧電素子261の変形が維持されて、先端部231aがロータ204に接触した状態が維持される(図26(a)、Phase5参照)。この状態で、図24(a)に示すように、Phase5において、第2圧電素子271が元の形状に戻り、先端部231aが基部231b及びベース部202に対してX1軸正方向側へ移動する(図26(c)、Phase5参照)。このときの先端部231aの移動量は、Phase4において第2圧電素子271に供給されていた電圧の絶対値に比例する。
電源部210は、図22に示すように、Phase5において、第2端子T2の電圧を-1.0Vに維持し、図21Aに示す第2組の駆動駒232の第1圧電素子262の電極部262aに第2配線212を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase5において、第4端子T4に発生させる電圧を0Vにし、図21Bに示す第2組の駆動駒232の第2圧電素子272に第4配線214を介して供給する電圧を0Vにする。
すると、図24(b)に示すように、Phase5において、第2組の駆動駒232をY方向に駆動する第1圧電素子262の変形が維持されて、先端部232aがロータ204から離間した状態が維持される(図26(b)Phase5参照)。同時に、図24(b)に示すように、Phase5において、第2圧電素子272が元の形状に戻り、先端部232aが基部232b及びベース部202に対してX2軸負方向側へ移動する(図26(d)、Phase5参照)。このときの先端部232aの移動量は、Phase4において第2圧電素子272に供給されていた電圧の絶対値に比例する。
すなわち、Phase5においては、図24(a)に示すように、第1組の駆動駒231の先端部231aは、ロータ204に当接した状態を維持してロータ204を支持しつつ、X1軸正方向側に移動してロータ204を回転方向Rへ駆動させる。同時に、図24(b)に示すように、第2組の駆動駒232の先端部232aは、Y軸負方向側へ移動してロータ204から離間した状態を維持しつつ、基部232b及びベース部202に対してロータ204の回転方向Rと逆のX2軸負方向側へ移動する。
(Phase6)
電源部210は、図22に示すように、Phase6において、第1端子T1の電圧を1.0Vに維持し、図21Aに示す第1組の駆動駒231の第1圧電素子261の電極部261aに第1配線211を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase6において、第3端子T3に1.0Vの電圧を発生させ、図21Bに示す第1組の駆動駒231の第2圧電素子271に第3配線213を介して電圧を供給する。
すると、図24(a)に示すように、Phase6において、第1組の駆動駒231をY方向に駆動する第1圧電素子261の変形が維持されて、先端部231aがロータ204に接触した状態が維持される(図26(a)、Phase6参照)。この状態で、図24(a)に示すように、Phase6において、第2圧電素子271が厚み滑り変形し、先端部231aが基部231b及びベース部202に対してX1軸正方向側へ移動する(図26(c)、Phase6参照)。このときの移動量は、Phase6で新たに供給された電圧の絶対値に比例する。
電源部210は、図22に示すように、Phase6において、第2端子T2の電圧を-1.0Vに維持し、図21Aに示す第2組の駆動駒232の第1圧電素子262の電極部262aに第2配線212を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase6において、第4端子T4に-3.0Vの電圧を発生させ、図21Bに示す第2組の駆動駒232の第2圧電素子272に第4配線214を介して電圧を供給する。
すると、図24(b)に示すように、Phase6において、第2組の駆動駒232をY方向に駆動する第1圧電素子262の変形が維持されて、先端部232aがロータ204から離間した状態が維持される(図26(b)、Phase6参照)。この状態で、図24(b)に示すように、Phase6において、第2圧電素子272が厚み滑り変形し、先端部232aが基部232b及びベース部202に対してX2軸負方向側へ移動する(図26(d)、Phase6参照)。このときの先端部232aの移動量は、第2圧電素子272に供給される電圧の絶対値に比例する。
すなわち、Phase6においては、図24(a)に示すように、第1組の駆動駒231の先端部231aは、ロータ204に当接した状態を維持してロータ204を支持しつつ、X1軸正方向側に移動してロータ204を回転方向Rへ駆動する。同時に、図24(b)に示すように、第2組の駆動駒232の先端部232aは、ロータ204から離間した状態を維持しつつ、基部232b及びベース部202に対してロータ204の回転方向Rと逆のX2軸負方向側へさらに移動する。
(Phase7)
電源部210は、図22に示すように、Phase7において、第1端子T1の電圧を1.0Vに維持し、図21Aに示す第1組の駆動駒231の第1圧電素子261の電極部261aに第1配線211を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase7において、第3端子T3に2.0Vの電圧を発生させ、図21Bに示す第1組の駆動駒231の第2圧電素子271に第3配線213を介して電圧を供給する。
すると、図24(a)に示すように、Phase7において、第1組の駆動駒231を駆動する第1圧電素子261の変形が維持されて、先端部231aがロータ204に接触した状態が維持される(図26(a)、Phase7参照)。この状態で、図24(a)に示すように、Phase7において、第2圧電素子271が厚み滑り変形し、先端部231aが基部231b及びベース部202に対してX1軸正方向側へ移動する(図26(c)、Phase7参照)。このときの移動量は、Phase7で新たに供給された2.0VとPhase6で供給されていた1.0Vとの電圧の差の絶対値に比例する。
電源部210は、図22に示すように、Phase7において、第2端子T2に正負が逆転した1.0Vの電圧を発生させ、図21Aに示す第2組の駆動駒232の第1圧電素子262の電極部262aに第2配線212を介して電圧を供給する。また、電源部210は、図22に示すように、Phase7において、第4端子T4に-2.0Vの電圧を発生させ、図21Bに示す第2組の駆動駒232の第2圧電素子272に第4配線214を介して電圧を供給する。
すると、図24(b)に示すように、Phase7において、第2組の駆動駒232を駆動する第1圧電素子262が逆方向に厚み滑り変形し、駆動駒232の基部232bをY軸正方向側へ移動させる(図26(b)、Phase7参照)。同時に、図24(b)に示すように、Phase7において、第2圧電素子272のX2軸負方向側への変形量が減少し、先端部232aが基部232b及びベース部202に対してX2軸正方向側へ移動する(図26(d)、Phase7参照)。このときの移動量は、Phase7で新たに供給された-2.0VとPhase6で供給されていた-3.0Vとの電圧の差の絶対値に比例する。
すなわち、Phase7においては、図24(a)に示すように、第1組の駆動駒231の先端部231aは、ロータ204に当接した状態を維持してロータ204を支持しつつ、ロータ204を回転方向Rへ駆動する。同時に、図24(b)に示すように、第2組の駆動駒232の先端部232aは、ロータ204の回転方向Rに沿うX2軸正方向側へ移動しながらY軸正方向側へ移動してロータ204に接近して当接する。
(Phase8)
電源部210は、図22に示すように、Phase8において、第1端子T1に正負が逆転した-1.0Vの電圧を発生させ、図21Aに示す第1組の駆動駒231の第1圧電素子261の電極部261aに第1配線211を介して電圧を供給する。また、電源部210は、図22に示すように、Phase8において、第3端子T3に3.0Vの電圧を発生させ、図21Bに示す第1組の駆動駒231の第2圧電素子271に第3配線213を介して電圧を供給する。
すると、図25(a)に示すように、Phase8において、第1組の駆動駒231を駆動する第1圧電素子261が逆方向に厚み滑り変形し、駆動駒203の基部203bをY軸負方向側へ移動させる(図26(a)、Phase8参照)。同時に、図25(a)に示すように、Phase8において、第2圧電素子271のX1軸正方向側への変形量が増加し、先端部231aが基部231b及びベース部202に対してX1軸正方向側へ移動する(図26(c)、Phase8参照)。このときの移動量は、Phase8で新たに供給された3.0VとPhase7で供給されていた2.0Vとの電圧の差の絶対値に比例する。
電源部210は、図22に示すように、Phase8において、第2端子T2の電圧を1.0Vに維持し、図21Aに示す第2組の駆動駒232の第1圧電素子262の電極部262aに第2配線212を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase8において、第4端子T4に-1.0Vの電圧を発生させ、図21Bに示す第2組の駆動駒232の第2圧電素子272に第4配線214を介して電圧を供給する。
すると、図25(b)に示すように、Phase8において、第2組の駆動駒232をY方向に駆動する第1圧電素子262の変形が維持されて、先端部232aがロータ204に当接した状態が維持される(図26(b)、Phase8参照)。同時に、図25(b)に示すように、Phase8において、第2圧電素子272のX2軸負方向側への変形量が減少し、先端部232aが基部232b及びベース部202に対してX2軸正方向側へ移動する(図26(d)、Phase8参照)。このときの移動量は、Phase8で新たに供給された-1.0VとPhase7で供給されていた-2.0Vとの電圧の差の絶対値に比例する。
すなわち、Phase8においては、図25(a)に示すように、第1組の駆動駒231の先端部231aは、ロータ204の回転方向Rへ沿うX1軸正方向側へ移動しながら、Y軸負方向側へ移動してロータ204から離間する。同時に、図25(b)に示すように、第2組の駆動駒232の先端部232aは、ロータ204に当接した状態で、ロータ204の回転方向Rに沿うX2軸正方向側に移動し、ロータ204を支持して回転方向Rへ駆動させる。これにより、第1組及び第2組の駆動駒231,232の先端部231a,232aによってロータ204を回転方向Rに駆動させつつ、第1組の駆動駒231の先端部231aから第2組の駆動駒232の先端部232aへロータ204が受け渡される。
このとき、Phase8において、双方の駆動駒231,232が、極めて短時間、ロータ204から離間する場合がある。このような場合であっても、ロータ204は、その慣性によりY方向の変位を殆どすることなく、第1組の駆動駒231の先端部231aによって支持されていた位置に留まる。そのため、ロータ204は、Y方向の略一定の位置が維持され、回転方向Rに駆動された状態で、第2組の駆動駒232の先端部232aによりY方向に支持され、回転方向Rへ駆動される。これにより、ロータ204は、Y方向の略一定の位置で支持軸205を中心として回転を継続する。
(Phase9)
電源部210は、図22に示すように、Phase9において、第1端子T1の電圧を-1.0Vに維持し、図21Aに示す第1組の駆動駒231の第1圧電素子261の電極部261aに第1配線211を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase9において、第3端子T3に発生させる電圧を0Vにし、図21Bに示す第1組の駆動駒231の第2圧電素子271に第3配線213を介して供給する電圧を0Vにする。
すると、図25(a)に示すように、Phase9において、第1組の駆動駒231をY方向に駆動する第1圧電素子261の変形が維持され、先端部231aがロータ204から離間した状態が維持される(図26(a)、Phase9参照)。同時に図25(a)に示すように、Phase9において、第2圧電素子271が元の形状に戻り、先端部231aが基部231b及びベース部202に対してX1軸負方向側へ移動する(図26(c)、Phase9参照)。このときの先端部231aの移動量は、Phase8において第2圧電素子207に供給されていた電圧の絶対値に比例する。
電源部210は、図22に示すように、Phase9において、第2端子T2の電圧を1.0Vに維持し、図21Aに示す第2組の駆動駒232の第1圧電素子262の電極部262aに第2配線212を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase9において、第4端子T4に発生させる電圧を0Vにし、図21Bに示す第2組の駆動駒232の第2圧電素子272に第4配線214を介して供給する電圧を0Vにする。
すると、図25(b)に示すように、Phase9において、第2組の駆動駒232をY方向に駆動する第1圧電素子262の変形が維持されて、先端部232aがロータ204に接触した状態が維持される(図26(b)、Phase9参照)。この状態で、図25(b)に示すように、Phase9において、第2圧電素子272が元の形状に戻り、先端部232aが基部232b及びベース部202に対してX2軸正方向側へ移動する(図26(d)、Phase9参照)。このときの先端部232aの移動量は、Phase8において第2圧電素子272に供給されていた電圧の絶対値に比例する。
すなわち、Phase9においては、図25(a)に示すように、第1組の駆動駒231の先端部231aは、Y軸負方向側へ移動してロータ204から離間した状態を維持しつつ、ロータ204の回転方向Rと逆のX1軸負方向側へ移動する。同時に、図25(b)に示すように、第2組の駆動駒232の先端部232aは、ロータ204に当接した状態を維持してロータ204を支持しつつ、ロータ204の回転方向Rに沿うX1軸正方向側に移動してロータ204を回転方向Rへ駆動させる。
(Phase10)
電源部210は、図22に示すように、Phase10において、第1端子T1の電圧を-1.0Vに維持し、図21Aに示す第1組の駆動駒231の第1圧電素子261の電極部261aに第1配線211を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase10において、第3端子T3に-3.0Vの電圧を発生させ、図21Bに示す第1組の駆動駒231の第2圧電素子271に第3配線213を介して電圧を供給する。
すると、図25(a)に示すように、Phase10において、第1組の駆動駒231をY方向に駆動する第1圧電素子261の変形が維持されて、先端部231aがロータ204から離間した状態が維持される(図26(a)、Phase10参照)。この状態で、図25(a)に示すように、Phase10において、第2圧電素子271が厚み滑り変形し、先端部231aが基部231b及びベース部202に対してX1軸負方向側へ移動する(図26(c)、Phase10参照)。このときの先端部231aの移動量は、第2圧電素子271に供給される電圧の絶対値に比例する。
電源部210は、図22に示すように、Phase10において、第2端子T2の電圧を1.0Vに維持し、図21Aに示す第2組の駆動駒232の第1圧電素子262の電極部262aに第2配線212を介して供給する電圧を維持する。また、電源部210は、図22に示すように、Phase10において、第4端子T4に1.0Vの電圧を発生させ、図21Bに示す第2組の駆動駒232の第2圧電素子272に第4配線214を介して電圧を供給する。
すると、図25(b)に示すように、Phase10において、第2組の駆動駒232をY方向に駆動する第1圧電素子262の変形が維持されて、先端部232aがロータ204に接触した状態が維持される(図26(b)、Phase10参照)。この状態で、図25(b)に示すように、Phase10において、第2圧電素子272が厚み滑り変形し、先端部232aが基部232b及びベース部202に対してX2軸正方向側へ移動する(図26(d)、Phase10参照)。このときの移動量は、Phase10で新たに供給された電圧の絶対値に比例する。
すなわち、Phase10においては、図25(a)に示すように、第1組の駆動駒231の先端部231aは、ロータ204から離間した状態を維持しつつ、基部231b及びベース部202に対してX1軸負方向側へさらに移動する。同時に、図25(b)に示すように、第2組の駆動駒232の先端部232aは、ロータ204に当接した状態を維持してロータ204を支持しつつ、ロータ204の回転方向Rに沿うX2軸正方向側に移動してロータ204を回転方向Rへ駆動する。
Phase11以降は、上記のPhase3からPhase10までの動作と同様の動作が繰り返し行われ、ロータ204の回転が継続される。これにより、第1組の駆動駒231の先端部231aと先端部23aと第2組の駆動駒232の先端部232aとによって交互に(順番に)ロータ204のY軸方向の支持及び回転方向Rの駆動がされ、ロータ204が支持軸205回りの回転を継続する。
本実施形態の駆動装置201は、各々の駆動駒203を支持軸205の平行な方向(第2の方向)へ駆動させる第1圧電素子206と、駆動駒203の先端部203aをロータ204の回転方向Rに沿う駆動駒203の幅w203方向(第1の方向)へ駆動させる第2圧電素子207とが別個に独立して設けられている。そのため、それぞれの方向の振動を独立した振動として取り出すことができる。
したがって、駆動駒203によりロータ204を回転させ、ロータ204と駆動駒203とを相対駆動させる際に、従来よりもロータ204を安定して回転させることができる。また、基部203bを挟み込む第1圧電素子206が互いに異なる方向に基部203bを駆動させる場合と比較して損失が発生し難く、エネルギー効率を向上させることができ、駆動装置201の出力を増大させることができる。
ここで、ベース部202は導電性を有しているため、第1圧電素子206を直接、ベース部202の表面に接合した場合には、ベース部202が第1圧電素子206の共通電極となる。そのため、第1組の駆動駒231を駆動する第1圧電素子261の電極261aと、第2組の駆動駒232を駆動する第1圧電素子262の電極262aとが共通電位になってしまう。すると、各組の第1圧電素子261,262に個別に異なる電圧を印加することが困難になり、駆動駒231,232を個別に駆動することが困難になる。
しかし、本実施形態では、図19に示すように、全ての第1圧電素子206とベース部材202との間に絶縁膜202gが設けられている。そのため、各組の駆動駒231,232を駆動する第1圧電素子261,262に個別に異なる電圧を容易に印加することができる。したがって、各組の駆動駒231,232を個別に駆動させ、ロータ204を安定的かつ連続的に回転させることができる。
また、図19に示すように、第1圧電素子206はベース部202の表面に設けられた絶縁膜202gと接する側の面に電極206aが設けられ、導電性を有する駆動駒203の基部203bは接地されている。そのため、第1組及び第2組の駆動駒231,232それぞれの第1圧電素子261,262の電極261a,262aに、図21A及び図21Bに示す第1配線211及び第2配線212をそれぞれ接続することで、第1圧電素子261,262の電極261a,262aと駆動駒231,232の基部231b,232bとの間に電圧を印加することができる。
ここで、絶縁膜202gの膜厚が例えば20μmよりも厚くなると、通常数μm程度の振幅で用いられる第1圧電素子206の振動が絶縁膜202gによって減衰し、ベース部202へ伝播し難くなる。また、膜厚のばらつきが例えば平均膜厚±50%よりも大きい場合、硬度が例えば鉛筆硬度で2Hよりも低い場合、高密度である場合などには、振動減衰効果が大きくなり、ベース部202へ振動が伝播し難くなる。
しかし、本実施形態の絶縁膜202gの膜厚は、10μm以上20μm以下となっている。加えて、絶縁膜202gは、膜厚のばらつきが平均膜厚±50%以下となっている。このように、絶縁膜202gの膜厚を所望の耐電圧が維持できる範囲で可能な限り薄く形成することで、絶縁膜202gの振動減衰効果を最小にすることができる。よって、第1圧電素子206の振動を絶縁膜202gを介して弾性体であるベース部202に確実に伝播させることができる。
また、絶縁膜202gの硬度は、鉛筆硬度で2H以上を有している。
このように、絶縁膜202gの硬度を所定値以上の硬度にすることで、絶縁膜202gによって支持駆動部201の振動が減衰することが防止される。したがって、駆動装置201の出力の低下を防止することができる。
また、第1圧電素子206の電極206aとベース部202の表面の絶縁膜202gとを接着する接着剤が絶縁膜202gと同系材料を含んでいない場合、第1圧電素子206の電極206aと絶縁膜202gとの接着が不十分になり、所望の接着強度を得ることができない場合がある。このような場合、第1圧電素子206の電極206aと絶縁膜202gとの間に作用するせん断力・剥離力によって接着面が剥離・乖離し、駆動駒203がベース部202から脱落してしまう虞がある。
しかし、本実施形態では、第1圧電素子206を絶縁膜202gに固定する接着剤と絶縁膜202gとが同系材料を含んでいる。これにより、接着剤と絶縁膜202gとが一体化して第1圧電素子206の電極206aと絶縁膜202gとが強固に接着され、接着剤の接着力を維持することができる。したがって、第1圧電素子206の電極206aと絶縁膜202gとの間に作用するせん断力・剥離力に対する強度を向上させることが可能になる。
また、第1圧電素子206が駆動駒203の基部203bを幅w203方向から挟み込み、第1圧電素子206が駆動駒203を幅w203方向と異なる支持軸205に平行な方向へ駆動させるようになっている。また、基部203bを挟み込む一対の第1圧電素子206,206の寸法及び形状が、略等しくなっている。これにより、駆動駒203の幅w203方向の剛性を均等にすることができる。したがって、駆動駒203の基部203bの幅w203方向の振動を抑制することができる。また、全ての第1圧電素子206及び第2圧電素子207を同一の形状及び寸法とすることで、製造を容易にして生産性を向上させることができる。
加えて、ベース部202には、駆動駒203を支持軸205と平行な方向へ駆動可能に保持する保持部202aが設けられている。保持部202aには、駆動駒203の幅w203方向から駆動駒203の基部203bを支持する支持面202fが設けられている。そのため、支持面202fによって第1圧電素子206を支持し、第1圧電素子206を介して駆動駒203の基部203bを幅w203方向から支持することができる。これにより、駆動駒203の幅w203方向の剛性をより高め、駆動駒203の基部203bの幅w203方向の振動を抑制することができる。
ここで、第1圧電素子206は、厚み方向の弾性係数(縦弾性係数)と変形方向の弾性係数(横弾性係数)との比が例えば約3:1程度である。したがって、駆動駒203の幅w203方向の剛性を高め、基部203bの駆動方向の剛性を低くすることができる。これにより、基部203bの幅w203方向の移動を防止して振動を抑制できる。また、基部203bの駆動方向の変位をしやすくすることができる。
また、駆動駒203が、ロータ204を支持して回転方向Rに駆動させる先端部203aと、一対の第1圧電素子206に挟み込まれた状態でベース部202の保持部202aに保持された基部203bと、を備えている。さらに、駆動駒203は先端部203aと基部203bとの間に、先端部203aをロータ204の回転方向Rに沿う保持部202a及び駆動駒203の幅w203方向に駆動する第2圧電素子207を備えている。
そのため、駆動駒203の先端部203aを幅w203方向に駆動することで、ロータ204の下面と先端部203aとの間に回転方向Rの接線方向の摩擦力が作用し、ロータ204を回転方向Rに駆動することができる。また、第1圧電素子206及び第2圧電素子207をそれぞれ独立して制御することができる。これにより、駆動駒203の先端部203aの支持軸205に沿う方向の駆動と、ロータ204の回転方向Rに沿う方向の駆動とを独立して制御することができる。
また、第1圧電素子206及び第2圧電素子207を同時に作動させ、駆動駒203の先端部203aの支持軸205に沿う方向の駆動と、ロータ204の回転方向Rに沿う方向の駆動とを同時に行うことができる。
したがって、図23~図25に示すように、ロータ204と先端部203aの接触時及び離間時に、駆動駒203の先端部203aをロータ204の回転方向Rに沿って移動させ、ロータ204の回転を妨げることなく、第1組の駆動駒231から第2組の駆動駒232へロータ204の受け渡しを行うことができる。
また、駆動駒203及びその基部203bを挟み込む二対の第1圧電素子206,206を3つ備えた駆動駒203の組が、第1組と第2組の二組構成されている。したがって、各組を異なるタイミングで駆動させることができる。また、各組の駆動駒231,232の先端部231a,232aによって、ロータ204を3点支持することが可能となる。したがって、2点支持や4点以上の支持の場合と比較して、ロータ204の支持を安定して行うことができる。
また、各組の駆動駒231,232は、ロータ204の回転方向Rに均等に配置されている。第1組と第2組の駆動駒231,232が、回転方向Rに交互に順番に配置されている。したがって、ロータ204を各組の駆動駒231,232によってバランスよく支持し、回転方向Rに効率よく駆動することができる。
また、駆動駒203の先端部203aが駆動する方向は、駆動駒203の基部203bが第1圧電素子206及び保持部202aの支持面202fによって挟み込まれる方向と同一の方向となっている。したがって、駆動駒203の先端部203aが送り駆動及び戻り駆動を行った場合に、駆動方向の前後から駆動駒203の基部203bを支持することができる。したがって、駆動駒203が支持軸205に平行な方向からずれることを抑制し、ロータ204の駆動に悪影響が及ぶことを防止できる。
また、電源部210が、第1組及び第2組の駆動駒231,232に位相差を有する電圧を供給することで、各組の駆動駒231,232によってそれぞれロータ204を駆動することができる。
また、電源部210が、各組の第1圧電素子206及び第2圧電素子207に供給する電圧の位相差を180°とすることで、第1組の駆動駒231と第2組の駆動駒232とによって交互に順番にロータ204を駆動させることができる。
また、電源部210が、各組の第1圧電素子206及び第2圧電素子207に、駆動駒203の先端部203aがロータ204との接触、駆動駒203の幅w203方向への送り、ロータ204からの離間、駆動駒203の幅w203方向の戻り、を順次繰り返すように電圧を供給することで、ロータ204の回転駆動を連続的に行うことができる。
また、電源部210は、図22のPhase3,7,11,15に示すように、第1端子T1に供給する電圧と第2端子T2に供給する電圧をオーバーラップさせている。これにより、第1組の駆動駒231から第2組の駆動駒232へのロータ204の受け渡しを連続的かつスムーズに行うことが可能になる。
また、電源部210が第1圧電素子206及び第2圧電素子207に供給する電圧の周波数は、第1圧電素子206、第2圧電素子207、駆動駒203、及びベース部202からなる支持駆動部201aの共振振動の振動数と略等しくなっている。そのため、駆動駒203の先端部203aによるロータ204の送り駆動及び戻り駆動の振幅をより大きくすることができる。支持駆動部201aの共振振動の周波数は、ベース部202、圧電素子、駆動駒203の先端部203a及び基部203bの材質を適切に選定することで調整することができる。
また、本実施形態では、図22に示すように、第1端子T1及び第2端子T2から各組の駆動駒231,232の第1圧電素子261,262に供給される電圧の周期と、第3端子T3及び第4端子T4から各組の第2圧電素子271,272に供給される電圧の周期とが等しくなっている。したがって、駆動駒231,232の支持軸205に平行な方向の駆動と、駆動駒231,232の幅w231,w232方向の先端部231a,232aの駆動の振動数が等しくなる。これにより、支持軸205に平行な方向の駆動駒231,232の振幅と、駆動駒231,232の幅w231,w232方向の先端部231a,232aの振幅を最大振幅とすることができる。
また、駆動駒203の先端部203aは、ロータ204の回転方向Rに沿う断面積がロータ204に近づくほど小さくなるように先細状に設けられている。したがって、先端部203aを直方体状の形状に形成する場合と比較して、先端部203aとロータ204との接触面積を減少させ、先端部203aの磨耗による先端部203aの体積変化率を小さくすることができる。これにより、先端部203aの磨耗による先端部203aの重量の変化を小さくすることができ、駆動駒203の共振周波数の変化を小さくすることができる。また、先端部203aを六角柱状の形状とすることで、その他の形状と比較して先端部203aの剛性を高くすることができる。
また、支持軸205と略平行に設けられ駆動駒203の幅w203方向と略垂直に交差するベース部202の側面202cに、溝部202dが形成されている。すなわち、溝部202dは、ベース部202を介して伝播する支持軸205と略平行な方向の振動に対して、略垂直に交差するように設けられている。そのため、溝部202dによって振動を吸収し、ベース部202による振動の伝播を減少させることができる。
また、第1圧電素子206が、ロータ204と溝部202dとの間に設けられている。したがって、ベース部202のロータ204と反対側から溝部202dを越えて伝播する振動を減少させることができる。
また、ベース部202の駆動駒203を保持する保持部202aと反対側の端部が取付部301aに固定され、溝部202dは駆動駒203よりも取付部301aに近い位置に設けられている。そのため、取付部301aの振動がベース部202に伝播した場合であっても、駆動駒203から比較的遠い位置で振動を減少させ、取付部301aの振動が駆動駒203の駆動に悪影響を及ぼすことを防止できる。
また、溝部202dの支持軸205に平行な方向の幅w201は、ベース部202の振動の振幅よりも大きくなっている。そのため、溝部202dの両側のベース部202同士が衝突することを防止できる。
また、溝部202dの支持軸205に平行な方向の幅w201は、ベース部202、駆動駒203、第1圧電素子206、及び第2圧電素子207からなる支持駆動部201aの共振振動の振幅よりも大きくなっている。したがって、支持駆動部201aが共振状態で振動した場合でも、溝部202dの両側のベース部202同士が衝突することを防止できる。
また、溝部202dの深さd201をベース部202の半径の40%以上80%以下とすることで、ベース部202の強度を十分に確保しつつ、十分な振動の伝播の抑制効果を得ることができる。
また、ベース部202と支持軸205との間に間隙202eが形成されているので、ベース部202から支持軸205に伝播する振動を減少させることができる。また、支持軸205からベース部202に伝播する振動を減少させることができる。したがって、駆動駒203及びロータ204の駆動に悪影響が及ぶことを防止できる。
次に、本実施形態の駆動装置201を備えたレンズ鏡筒及びカメラの一例について説明する。本実施形態の交換レンズは、カメラボディとともにカメラシステムを形成するものである。交換レンズは、公知のAF(オートフォーカス)制御に応じて合焦動作を行うAFモードと、撮影者からの手動入力に応じて合焦動作を行うMF(マニュアルフォーカス)モードとが切り替え可能になっている。
図27は、本実施形態におけるカメラ301の構成を模式的に示す概略構成図である。
図27に示すように、カメラ301は、撮像素子308が内蔵されたカメラボディ302と、レンズ307を有するレンズ鏡筒303とを備えている。
レンズ鏡筒303は、カメラボディ302に着脱可能な交換レンズである。レンズ鏡筒303は、レンズ307、カム筒306、駆動装置201等を備えている。駆動装置201は、カメラ301のフォーカス動作時にレンズ307を駆動する駆動源として用いられている。駆動装置201のロータ204から得られた駆動力は、直接、カム筒306に伝えられる。レンズ307は、カム筒306に保持されており、駆動装置201の駆動力により、光軸方向Lに略平行に移動して、焦点調節を行うフォーカスレンズである。
カメラ301の使用時には、レンズ鏡筒303内に設けられたレンズ群(レンズ307を含む)によって、撮像素子308の撮像面に被写体像が結像される。撮像素子308によって、結像された被写体像は、電気信号に変換される。その信号をA/D変換することによって、画像データが得られる。
以上説明したように、本実施形態のカメラ301及びレンズ鏡筒303は、上記の実施形態で説明した駆動装置201を備えている。したがって、従来よりもロータ204を安定的に回転させることができ、出力が向上した駆動装置201によって、カム筒306を直接駆動させることができる。したがって、エネルギーの損失が少なく省エネルギー効果が得られる。また、部品点数の削減が可能になる。
本実施形態では、レンズ鏡筒303は、交換レンズである例を示したが、これに限らず、例えば、カメラボディと一体型のレンズ鏡筒としてもよい。
尚、上述した実施形態は、種々変形して実施することができる。例えば、上記の実施形態では全ての第1圧電素子とベース部の間に絶縁膜が設けられている構成について説明したが、例えば、絶縁膜は、少なくとも第1組又は第2組のいずれか一方の組の駆動駒が備える第1圧電素子とベース部との間に設けられていればよい。
また、上記の実施形態では、第1圧電素子及び第2圧電素子が厚み滑り変形する場合について説明したが、これらは厚み方向に変形するものであってもよい。この場合、第1圧電素子によって駆動駒は保持部の幅方向(第1の方向)に移動し、第2圧電素子によって駆動駒の先端部は回転軸に平行な方向(第2の方向)に移動する。
また、ベース部は、支持軸を囲むように設けられていれば複数に分割されていてもよく、支持軸を完全に囲んでいなくてもよい。例えば、ベース部は、支持軸を囲む円周上の半分に偏って配置されていてもよく、支持軸を両側から挟みこむような配置であってもよい。
また、上述の実施形態では、駆動駒を支持軸と平行な方向へ駆動する第1圧電素子が駆動駒を挟み込むように一対設けられている場合について説明したが、第1圧電素子は駆動駒の一方の側面のみに設けられていてもよい。また、厚み方向への変位をする圧電素子を第1圧電素子として用い、ベース部の保持部の底面と駆動駒の基部の底面との間に第1圧電素子を配置するようにしてもよい。この場合には、ベース部に設けられた保持部の支持面によってロータの回転方向に沿う保持部の幅方向の両側から圧電素子を介すことなく基部を直接支持する。そして、基部を支持軸と平行な方向へスライド可能に保持するガイド部として支持面を機能させるようにしてもよい。
また、上述の実施形態では、第1圧電素子及び第2圧電素子を備える駆動駒の組を二組備える場合について説明したが、駆動駒の組は三組以上であってもよい。また、駆動駒の組が備える駆動駒の数は、1つ、2つ、若しくは4つ以上であってもよい。例えば、上述の実施形態において、ベース部の対角に配置された配置された2つの駆動駒を1組として、駆動駒の組を3組構成してもよい。この場合には、各組の電圧の位相差を例えば120度とすることができる。これにより、常に2組の駆動駒によってロータを支持・回転させることができる。駆動駒の各組の電圧の位相差は、360度を組数で除した値(すなわち二組の場合は180度、三組の場合は120度)とすればよい。
また、上述の実施形態では、第1圧電素子が駆動駒の基部を挟み込む方向(第1の方向)と第2圧電素子が駆動駒の先端部を駆動する方向(第3の方向)とが同一の場合について説明したが、これらを異ならせてもよい。例えば、第3の方向を駆動駒の幅w203方向と交差しかつロータの回転方向に沿う方向とすることで、ロータを回転させやすくしてもよい。
また、ベース部の支持面は、支持軸と平行な方向(第2の方向)に対して傾斜していなくてもよい。例えば、保持部に第1圧電素子の保持部の底面側の端部を係止する突起状の係止部を設けてもよい。また、第1圧電素子の保持部の底面側の端部を基部の底面よりも突出させて位置決め部として機能させ、位置決め部を保持部の底面に突き当てることで位置決めをしてもよい。
また、ベース部と支持軸との間の間隙は、ベース部の強度確保の観点から溝部の保持部側の縁まで形成するようにしてもよい。
また、電源部の各端子から第1圧電素子及び第2圧電素子へ供給する電圧を正弦波や正弦波状の電圧波形としてもよい。