WO2010071173A1 - 撮影装置および合焦位置決定方法 - Google Patents
撮影装置および合焦位置決定方法 Download PDFInfo
- Publication number
- WO2010071173A1 WO2010071173A1 PCT/JP2009/071040 JP2009071040W WO2010071173A1 WO 2010071173 A1 WO2010071173 A1 WO 2010071173A1 JP 2009071040 W JP2009071040 W JP 2009071040W WO 2010071173 A1 WO2010071173 A1 WO 2010071173A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- focus
- lens
- imaging
- optical system
- focusing
- Prior art date
Links
Images









Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/239—Image signal generators using stereoscopic image cameras using two 2D image sensors having a relative position equal to or related to the interocular distance
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/36—Systems for automatic generation of focusing signals using image sharpness techniques, e.g. image processing techniques for generating autofocus signals
- G02B7/38—Systems for automatic generation of focusing signals using image sharpness techniques, e.g. image processing techniques for generating autofocus signals measured at different points on the optical axis, e.g. focussing on two or more planes and comparing image data
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/18—Focusing aids
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/18—Focusing aids
- G03B13/20—Rangefinders coupled with focusing arrangements, e.g. adjustment of rangefinder automatically focusing camera
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/18—Focusing aids
- G03B13/20—Rangefinders coupled with focusing arrangements, e.g. adjustment of rangefinder automatically focusing camera
- G03B13/22—Rangefinders coupled with focusing arrangements, e.g. adjustment of rangefinder automatically focusing camera coupling providing for compensation upon change of camera lens
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/18—Focusing aids
- G03B13/24—Focusing screens
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
- G03B13/34—Power focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
- G03B13/34—Power focusing
- G03B13/36—Autofocus systems
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B19/00—Cameras
- G03B19/02—Still-picture cameras
- G03B19/04—Roll-film cameras
- G03B19/07—Roll-film cameras having more than one objective
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B3/00—Focusing arrangements of general interest for cameras, projectors or printers
- G03B3/10—Power-operated focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B35/00—Stereoscopic photography
- G03B35/08—Stereoscopic photography by simultaneous recording
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/189—Recording image signals; Reproducing recorded image signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/296—Synchronisation thereof; Control thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N21/00—Selective content distribution, e.g. interactive television or video on demand [VOD]
- H04N21/20—Servers specifically adapted for the distribution of content, e.g. VOD servers; Operations thereof
- H04N21/21—Server components or server architectures
- H04N21/218—Source of audio or video content, e.g. local disk arrays
- H04N21/21805—Source of audio or video content, e.g. local disk arrays enabling multiple viewpoints, e.g. using a plurality of cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/45—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from two or more image sensors being of different type or operating in different modes, e.g. with a CMOS sensor for moving images in combination with a charge-coupled device [CCD] for still images
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/673—Focus control based on electronic image sensor signals based on contrast or high frequency components of image signals, e.g. hill climbing method
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N2013/0074—Stereoscopic image analysis
- H04N2013/0081—Depth or disparity estimation from stereoscopic image signals
Definitions
- the present invention relates to an imaging apparatus including a first imaging unit and a second imaging unit and performing imaging using these two imaging units, and a method of determining a focus position in the imaging apparatus.
- the two imaging units are provided side by side with parallax at the positions corresponding to the right eye and the left eye, and from both imaging units An image signal for the right eye and an image signal for the left eye are respectively generated by the signal processing unit in the subsequent stage based on the output image signal.
- the image signal for the right eye and the image signal for the left eye generated by the signal processing unit of the imaging device are input to a display device having a display screen capable of three-dimensional display as described in Non-Patent Document 1. Then, a stereoscopic image is displayed on the display screen.
- the in-focus position determination means provided inside moves the focus lens in the photographing optical system within the predetermined search area
- AF Auto Focus
- the in-focus position determination unit performs an AF search to move the focus lenses included in both imaging units in opposite directions to each other.
- a technique has been proposed in which the in-focus position of both imaging units is determined using the AF search result of the imaging unit in which the in-focus position is detected first.
- the lens diameter of the focus lens, the diameter of the lens barrel, the variation in the light receiving sensitivity of the image pickup element, and the like are absolutely present (in the following description, these are collectively referred to as solid differences). Therefore, if the in-focus position of one imaging unit is reflected in the other imaging unit as in Patent Documents 1 and 2 described above, the in-focus position of the other imaging unit is shifted due to the difference in the solid state.
- the present invention provides an imaging device capable of accurately determining the in-focus position of each of two imaging units in the same time as conventional, and a focusing position determination method in the imaging device.
- the purpose is
- a first imaging device of the present invention for achieving the above object is A first imaging optical system including a first focusing lens, a first focusing lens driving unit for moving the first focusing lens in the optical axis direction, and an object being imaged by the first imaging optical system
- a first imaging unit having a first imaging element that receives an object light and generates an image signal representing the object
- a second imaging optical system including a second focusing lens, a second focusing lens driving unit for moving the second focusing lens in the optical axis direction, and an image of an object formed by the second imaging optical system
- the in-focus position is searched while moving the first focus lens within a predetermined first search area, and the first focus lens is stopped at the in-focus position, and the second photographing optical system is In the second search area narrower than the first search area, including the expected focusing position of the second focus lens corresponding to the in-focus position of the first focus lens And a
- the in-focus position determining means executes the AF search within the predetermined first search area for the first focus lens in the first imaging optical system.
- the AF search is performed in the second search area narrower than the first search area including the in-focus expected position corresponding to the in-focus position of the first focus lens Do. That is, the in-focus position determination means does not arrange the second focus lens in the second imaging optical system at the in-focus expected position corresponding to the in-focus position of the first imaging optical system.
- the second focus lens is moved to a second search narrower than the first search area, including the expected focusing position, so as to eliminate the fixed difference between the second and third imaging optical systems. After searching for the in-focus position while moving the second focus lens to the in-focus position and stopping.
- the solid-state difference between the first imaging optical system and the second imaging optical system is eliminated, and the first focus lens and the second focus lens are respectively disposed at appropriate focusing positions.
- the AF search is completed in substantially the same time as in the prior art without much time.
- a second imaging device of the present invention for achieving the above object is A first imaging optical system including a first focusing lens, a first focusing lens drive unit for moving the first focusing lens in the optical axis direction, and an image of an object formed by the first imaging optical system
- a first imaging unit having a first imaging device that receives an object light and generates an image signal representing the object
- a second imaging optical system including a second focusing lens, a second focusing lens driving unit for moving the second focusing lens in the optical axis direction, and an image of an object formed by the second imaging optical system
- a deviation storage unit which nonvolatilely stores deviations of the in-focus position of the second focus lens from the in-focus position of the first focus lens;
- the deviation storage unit for example, when manufacturing this imaging device, the deviation of the in-focus position indicating the solid difference between the first imaging unit and the second imaging unit is obtained in advance You should remember.
- the in-focus position determining means executes the AF search within the predetermined first search area for the first focus lens in the first imaging optical system.
- the second focus lens is not disposed at the expected focusing position detected by the AF search on the first photographing unit side, and the deviation storage is more than the expected focusing position.
- the second focus lens is moved to a position deviated by the deviation stored in the unit and stopped.
- the in-focus position determination means does not arrange the second focus lens in the second imaging optical system at the in-focus expected position corresponding to the in-focus position of the first imaging optical system.
- the first focusing lens is deviated from the expected focusing position by the deviation stored in the deviation storage unit.
- the second focus lens is moved and stopped.
- the solid-state difference between the first imaging optical system and the second imaging optical system is eliminated, and the first focus lens and the second focus lens are respectively disposed at appropriate focusing positions.
- the AF search ends in substantially the same time as in the prior art.
- a third imaging apparatus of the present invention for achieving the above object is A first imaging optical system including a first focusing lens, a first focusing lens drive unit for moving the first focusing lens in the optical axis direction, and an image of an object formed by the first imaging optical system
- a first imaging unit having a first imaging device that receives an object light and generates an image signal representing the object
- a second imaging optical system including a second focusing lens, a second focusing lens driving unit for moving the second focusing lens in the optical axis direction, and an image of an object formed by the second imaging optical system
- Focusing position determination means for stopping each lens at each focusing position; Deviation storage for storing the deviation of the in-focus position of the second focus lens searched by the in-focus position determination means from the in-focus position of the first focus lens searched by the in-focus position determination means Equipped with
- the in-focus position determination means searches for the in-focus position while moving the first focusing lens in the first imaging optical system.
- the first focus lens is stopped at the in-focus position, and the second focus lens corresponds to the second focus lens corresponding to the in-focus position of the first focus lens. It is characterized in that it is moved to a position deviated by the deviation stored in the above-mentioned deviation storage unit from the in-focus expected position of.
- the case where the deviation is stored in the deviation storage unit is, for example, the second time after the power supply is temporarily turned off and the power switch is turned on again when the deviation storage unit is configured of volatile memory. In the case of the following shooting.
- the focusing position determining means first instructs each of the first and second focus lens driving units to obtain the first and second focusing lenses for the first photographing. While moving each focus lens in the direction of the optical axis, each focus position is searched, and the first and second focus lenses are stopped at each focus position. The deviation from the in-focus position of the first focus lens to the in-focus position of the second focus lens found at the time of the first photographing is stored in the deviation storage unit, and for the second and subsequent photographing
- the focusing position determination means executes an AF search for the first focusing lens in the predetermined first search area for the first shooting optical system, and the second shooting optical system for the second shooting optical system. The second focus lens is moved to a position where the second focus lens is biased by the deviation stored in the deviation storage unit so as to eliminate the fixed difference between the system and the first imaging optical system, and then stopped. .
- the solid-state difference between the first imaging optical system and the second imaging optical system is eliminated in any imaging cycle, and the first focusing lens and the second focusing lens are respectively positioned at appropriate focusing positions. Be placed.
- the distance for searching the second focus lens is limited to a section shorter than the first search, and it does not take much time, and the AF search is completed in about the same time as in the past. After that, the AF search ends in approximately the same time as in the past.
- the second and subsequent shooting after power on is described as an example in the case where the deviation is stored in the deviation storage unit, but in the case where the deviation is stored in the deviation storage unit, for example, a zoom switch
- the imaging is performed once, the deviation is stored in the deviation storage unit, and the imaging is performed again with the same focal length.
- the deviation storage unit is configured by, for example, a non-volatile memory
- the contents of the non-volatile memory may be erased by, for example, a reset operation.
- the second and subsequent photographing after being reset corresponds to the case where the deviation is stored.
- both the first imaging optical system and the second imaging optical system are variable in focal length and are adjusted to the same focal length
- the deviation storage unit records the deviation for each of a plurality of focal distances.
- both of the first and second focus lenses are disposed at appropriate in-focus positions by using the deviation corresponding to the focal length.
- the first photographing optical system and the second photographing optical system are arranged side by side to generate an image signal for stereoscopic vision.
- an image signal for the right eye and an image signal for the left eye, which are in focus, are obtained by the first imaging optical system and the second imaging optical system, respectively.
- a first imaging optical system including a first focusing lens, a first focusing lens drive unit for moving the first focusing lens in the optical axis direction, and an image of an object formed by the first imaging optical system
- a second imaging optical system including a second focus lens, and a first imaging unit having a first imaging element that receives an object light and generates an image signal representing the object
- a second focus lens drive unit for moving the second focus lens in the optical axis direction
- a focusing position determining method in an imaging apparatus comprising: both imaging units comprising a second imaging unit having a second imaging element; A first step of searching for a focusing position while moving the first focusing lens within a predetermined first search area and stopping the first focusing lens at the focusing position; In the second search area narrower than the first search area, including the expected focusing position of the second focus lens corresponding to
- the second focus lens includes the in-focus expected position of the second focus lens corresponding to the in-focus position of the first focus lens.
- Each of the first and second focus lenses is disposed at the correct in-focus position by searching for the in-focus position while moving in the second search area narrower than the first search area. .
- the solid-state difference between the first imaging optical system and the second imaging optical system is eliminated, and the first focus lens and the second focus lens are respectively disposed at appropriate focusing positions.
- the AF search is completed in substantially the same time as in the prior art without much time.
- a first imaging optical system including a first focusing lens, a first focusing lens drive unit for moving the first focusing lens in the optical axis direction, and an image of an object formed by the first imaging optical system
- a second imaging optical system including a second focus lens, and a first imaging unit having a first imaging element that receives an object light and generates an image signal representing the object
- a second focus lens drive unit for moving the second focus lens in the optical axis direction
- light from the subject formed by the second imaging optical system to receive light from the subject to generate an image signal representing the subject
- a focus position determination method in the imaging apparatus comprising deviation memory to keep nonvolatile manner, A first step of searching for the in-focus position while moving the first focus lens and stopping the first focus lens at the in-focus position; The second focus lens is moved to a position deviated from the expected in-focus position of the second focus lens corresponding to the in-focus position of the first focus lens by the deviation stored in the deviation storage unit. And a second step.
- the second focus lens is set to be closer than the in-focus expected position of the second focus lens corresponding to the in-focus position of the first focus lens.
- a first imaging optical system including a first focusing lens, a first focusing lens drive unit for moving the first focusing lens in the optical axis direction, and an image of an object formed by the first imaging optical system
- a second imaging optical system including a second focus lens, and a first imaging unit having a first imaging element that receives an object light and generates an image signal representing the object
- a second focus lens drive unit for moving the second focus lens in the optical axis direction
- light from the subject formed by the second imaging optical system to receive light from the subject to generate an image signal representing the subject
- a focus position determination method in the imaging apparatus comprising deviation memory for storing, Instruct each of the first and second focus lens drive units to move each of the first and second focus lenses in the direction of the optical axis while searching for the in-focus position of each of the first and second focus lenses.
- the first focus lens While searching for the in-focus position, the first focus lens is stopped at the in-focus position, and for the second imaging optical system, the second focus lens is used as the in-focus position of the first focus lens. And a third step of moving to a position deviated by the deviation stored in the deviation storage unit from the expected focusing position of the second focus lens corresponding to.
- the second focus lens is a second focus lens corresponding to the in-focus position of the first focus lens.
- Each of the first and second focus lenses is accurate by searching for the in-focus position while moving within the second search area narrower than the first search area, including the in-focus expected position. It is placed at the in-focus position.
- the solid-state difference between the first imaging unit and the second imaging unit is eliminated, and the first focus lens and the second focus lens are respectively disposed at appropriate focusing positions.
- the AF search is completed in substantially the same time as in the prior art without much time.
- the deviation obtained at the time of the first photographing is stored in the deviation storage unit, and the second focusing lens corresponds to the in-focus position of the first focusing lens for the next and subsequent photographing.
- the second focus lens By placing the second focus lens at a position deviated by the deviation stored in the deviation storage unit from the expected focusing position of the second focus lens, the solid-state difference between the first imaging unit and the second imaging unit is eliminated.
- the first focus lens and the second focus lens are respectively disposed at the correct in-focus positions. At this time, the AF search ends at the same time as in the conventional case.
- the imaging apparatus capable of accurately determining the in-focus position of each of the two imaging units and the in-focus position determination method in the imaging apparatus can be realized in the same time as in the related art.
- FIG. 1 It is a figure showing the photographing device which is one embodiment of the present invention. It is a block diagram which shows the structure inside the imaging device 1 of FIG.
- the main CPU 100 instructs the first F lens drive unit 104A and the second F lens drive unit 104B to move the first and second focus lenses while setting the focusing position determination method to be performed by the AF detection unit 120. It is a figure explaining. It is a figure explaining the processing content of the search range setting part 121.
- FIG. It is a flowchart which shows the process sequence of the focusing position determination which main CPU100 performs in cooperation with AF detection part. It is a figure which shows 2nd Embodiment.
- FIG. 6 instructs the first F lens drive unit 104A and the second F lens drive unit 104B to move the first and second focus lenses while focusing on the AF detection unit 120. It is a figure explaining the position determination method. It is a figure explaining the processing content of focusing position operation part 121A.
- FIG. 7 is a flowchart showing a processing procedure of in-focus position determination that is executed by the main CPU shown in FIG. 6 in cooperation with a DSP that constitutes an AF detection unit and an F lens drive unit. It is a figure explaining 3rd Embodiment.
- the main CPU 100 shown in FIG. 10 instructs the first F lens drive unit 104A and the second F lens drive unit 104B to move the first and second focus lenses while focusing on the AF detection unit 120.
- FIG. 10 It is a figure explaining the position determination method. It is a figure explaining the processing content of a deviation detection part. It is a flowchart which shows the process sequence of the focusing position determination which main CPU100 shown in FIG. 10 performs in cooperation with DSP which comprises AF detection part etc.
- FIG. 10 It is a figure explaining the position determination method. It is a figure explaining the processing content of a deviation detection part. It is a flowchart which shows the process sequence of the focusing position determination which main CPU100 shown in FIG. 10 performs in cooperation with DSP which comprises AF detection part etc.
- FIG. 1 is a view showing an imaging apparatus according to an embodiment of the present invention.
- FIG. 1A shows a perspective view of the photographing device 1 as viewed obliquely from above.
- the imaging device 1 shown in FIG. 1A includes two imaging units 1A and 1B.
- the two imaging units are described as a first imaging unit 1A and a second imaging unit 1B to be distinguished.
- the first imaging unit 1A and the second imaging unit 1B are arranged side by side so as to be able to generate image signals for stereoscopic viewing, and these imaging units 1A and 1B are used for the right eye Image signals for the left eye are respectively generated.
- the power switch 10A on the upper surface of the photographing apparatus 1 of FIG. 1 is operated, and the photographing mode dial 10B is set to, for example, a mode called stereoscopic mode and the shutter button 10C is operated, It is generated by the units 1A and 1B.
- the shutter button 10C provided in the photographing apparatus 1 has two operation modes of half pressing and full pressing.
- this photographing apparatus 1 when the shutter button 10C is half pressed, exposure adjustment or Focus adjustment is performed, and shooting is performed when the shutter button is fully pressed.
- a flash emission window WD for emitting a flash toward the subject when the field brightness is dark is provided above the photographing unit 1B.
- a monitor DISP capable of three-dimensional display is provided on the back, and on the monitor DISP, the same subject captured by both the imaging units 1A and 1B is It is displayed as a stereoscopic image. Furthermore, operators such as the zoom switch 10D, the menu / OK button 10E, and the cross key 10F are also provided.
- the power switch 10A, the shutter button 10B, the mode dial 10C, the zoom switch 10D, the menu / OK button 10E, the cross key 10F, and the like may be collectively referred to as the operation unit 10.
- FIG. 2 is a block diagram showing an internal configuration of the photographing apparatus 1 of FIG.
- the internal configuration of the photographing device 1 will be described with reference to FIG.
- the operation of the photographing device 1 is generally controlled by the main CPU 100.
- a ROM 101 is connected to the main CPU 100 via a bus Bus, and the ROM 101 stores programs necessary for the imaging device 1 to operate.
- the main CPU 100 centrally controls the operation of the photographing apparatus 1 in accordance with the procedure of this program.
- the main CPU 100 controls the power control unit 1001 to supply the power from the battery BT to each unit in FIG. 2 through the power control unit 1001.
- the imaging device 1 is put into operation.
- the main CPU 100 starts the photographing process.
- the AF detection unit 120, the search range setting unit 121, the AE / AWB detection unit 130, the image input controller 114A, the digital signal processing unit 116A, and the 3D image generation unit 117 are configured by a processor such as DSP (Digital Signal Processor). It is assumed that the main CPU 100 executes processing in cooperation with the DSP.
- the display control unit 119 and the monitor DISP are assumed to be configured by an LCD.
- each component of the first imaging unit 1A will be described with the word 'first'
- each component of the second imaging unit 1B will be described with the word 'second'.
- a first imaging optical system 110A including a first focus lens FLA, and a first focus lens drive unit for moving the first focus lens FLA in the optical axis direction (hereinafter referred to as the first F lens driving unit 1) 104A, and a first image pickup element 111A that receives object light formed by the first imaging optical system and generates an image signal representing the object.
- the first F lens driving unit 1A a first imaging optical system 110A including a first focus lens FLA, and a first focus lens drive unit for moving the first focus lens FLA in the optical axis direction
- the first F lens driving unit 1A a first image pickup element 111A that receives object light formed by the first imaging optical system and generates an image signal representing the object.
- a first stop IA is disposed in the first photographing optical system 110A, and a first stop driving unit 105A is provided to change the aperture diameter of the first stop IA.
- the first photographing optical system 100A is a zoom lens, and is also provided with a Z lens drive unit 103A that controls the zoom lens to have a predetermined focal length.
- FIG. 2 schematically shows that the entire photographing optical system is a zoom lens with a single lens ZL.
- the second imaging unit 1B moves the imaging optical system including the second focus lens FLB and the second focus lens FLB in the direction of the optical axis in the same manner as the first imaging unit 1A.
- a second focus lens driving unit (hereinafter referred to as a second F lens driving unit) 104B and light from a subject formed by the second imaging optical system to receive light from the subject and generate an image signal representing the subject A second imaging element 111B is provided.
- the first imaging unit 1A and the second imaging unit 1B generate stereoscopic image signals, that is, the first imaging unit 1A generates an image signal for the right eye, and the second imaging unit 1B generates the left imaging signal. Image signals for the eyes are respectively generated.
- the first imaging unit 1A and the second imaging unit 1B have the same configuration except that they generate an image signal for the right eye or an image signal for the left eye.
- the image signals of both imaging units are converted into digital signals by the A / D 113A and the second A / D 113B, and the processing after leading to the bus Bus is the same, so the image signals for the first imaging unit 1A I will explain the configuration along the flow of
- the main CPU 100 controls the power control unit 1001 to supply the power from the battery BT to each unit to shift the photographing device 1 to the operation state.
- the main CPU 100 controls the F lens drive unit 104A and the diaphragm drive unit 105A to start adjustment of exposure and focus. Further, the TG 106A is instructed to set the electronic shutter in the imaging device 111A, and for example, the imaging device 111A outputs an image signal to the analog signal processing unit 112A every 1/60 seconds.
- the analog signal processing unit 112A receives the supply of the timing signal from the TG 106A, receives the supply of the image signal every 1/60 seconds from the imaging device 111A, performs noise reduction processing and the like, and performs noise reduction processing.
- the analog image signal is supplied to the next stage A / D 113A. Also in the A / D 113A, conversion processing of an analog image signal to a digital image signal is performed every 1/60 seconds in synchronization with the timing signal from the TG 106A.
- the digital image signal converted and output by the A / D 113A is led to the bus Bus every 1/60 seconds by the image input controller 114A, and the image signal led to the bus Bus is stored in the SDRAM 115. Since an image signal is output from the imaging element 111A every 1/60 second, the content of the SDRAM 115 is rewritten every 1/60.
- the image signal stored in the SDRAM 115 is read out every 1/60 by the DSP that constitutes the AF detection unit 120, the AE / AWB detection unit 130, and the digital signal processing unit 116A.
- the main CPU 100 controls the F lens drive unit 104A to move the focus lens FLA, and an AF search is performed. Based on the detection result of the AF detection unit 120, the main CPU 100 instructs the F lens drive unit 104A to move the first focus lens FLA to the in-focus position and to stop it. For this reason, regardless of which direction the first imaging unit 1A is directed, the focus is adjusted immediately, and the subject in focus is displayed almost always on the monitor DISP.
- the AE / AWB detection unit 130 detection of luminance and calculation of gains to be set to the white balance amplifier in the digital signal processing unit 116A are performed every 1/60.
- the main CPU 100 controls the diaphragm driving unit 105A according to the detection result of the luminance of the AE / AWB detection unit 130 to change the aperture diameter of the diaphragm I. Further, the digital signal processing unit 116A receives the detection result from the AE / AWB detection unit 130 and sets the gain of the white balance amplifier.
- the digital signal processing unit 116A processes the image signal suitable for display, and the image signal converted to a signal suitable for display by the signal processing of the digital signal processing unit 116A is a 3D image generation unit Then, the image signal for display for the right eye is generated by the 3D image generation unit 117, and the generated image signal for the right eye is stored in the VRAM 118.
- the same operation as the operation up to this point is also performed by the second imaging unit 1B at the same timing.
- the VRAM 118 stores two types of image signals, one for the right eye and one for the left eye.
- the main CPU 100 causes the display control unit 119 to transfer the image signal for the right eye and the image signal for the left eye in the VRAM 118 to display an image on the monitor DISP.
- the image signal for the right eye and the image signal for the left eye are superimposed and displayed on the monitor DISP of FIG. 1, the image on the monitor DISP can be viewed stereoscopically to the human eye. Since the image signals are continuously output from the first and second imaging elements 111A and 111B every 1/60, the image signal in the VRAM 118 is rewritten every 1/60, and the stereoscopic image on the monitor DISP is also 1/60. It is switched and displayed every 60, and a stereoscopic image is displayed as a moving image.
- the main CPU 100 causes the AE / AWB detection unit 130 to immediately before the shutter button 10C is fully pressed.
- the detected AE value is received and instructed to the first and second diaphragm driving units 105A and 105B to make the first and second diaphragms IA and IB have a diameter corresponding to the AE value, and the first F lens
- the control unit 104A instructs the AF detection unit 120 to detect the contrast while moving the first focus lens FLA in the first search area.
- the main CPU 100 receives the in-focus position P1 at which the maximum contrast is obtained and stops the first focus lens FLA at the in-focus position P1.
- the first search including the second focusing lens FLB and the expected focusing position of the second focusing lens FLB corresponding to the focusing position of the first focusing lens FLA
- the AF detection unit 120 is made to search for the in-focus position while moving within the second search area narrower than the area.
- the main CPU 100 receives the search result from the AF detection unit 120 and stops the second focus lens FLB at the in-focus position indicated by the search result.
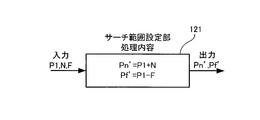
- the AF detection unit 120 instructs the search range setting unit 121 to set the focus position P1 of the first focus lens FLA and data indicating the search area read from the flash ROM 102 (near side deviation N And a second search area narrower than the first search area including the in-focus expected position corresponding to the in-focus position of the first focus lens on the basis of F. and the far-side deviation F), and the main CPU 100 calculates the second search area.
- the calculation result of the second search area is received, and the second F lens drive unit 104B is instructed to perform an AF search for searching for the in-focus position in the second search area.
- the focus lens FLA of the first imaging unit 1A is made to perform the conventional AF search
- the second imaging unit 1B includes the first expected range including the expected focusing position of the second focus lens FLB. Even if the AF search is performed in the narrower second range, the second imaging unit 1B only needs to perform the AF search in a short region across the expected focusing position, and thus the same degree as in the conventional case AF search ends in time.
- the main CPU 100 causes the first and second TGs 106A and 106B to set the electronic shutter and starts still image shooting processing.
- the main CPU 100 causes the first and second image pickup elements 111A and 111B to output image signals to the first and second analog signal processing units 112A and 112B at the off timing of the electronic shutter, and the first and second analog The signal processing units 112A and 112B perform noise reduction processing. Thereafter, analog image signals are converted to digital image signals by the first and second A / Ds 113A and 113B.
- gains are set in the internal white balance amplifier in the first and second digital signal processing units 116A and 116B based on the white balance information detected immediately before the full press detected by the AE / AWB detection unit 130. Appropriate white balance adjustment is performed.
- the first and second image input controllers 114A guide the digital image signals converted by the first and second A / Ds 113A and 113B to the bus Bus side according to the instruction of the main CPU 100, and pass the bus Bus. Then, all image signals are temporarily stored in the SDRAM 115. Thereafter, the digital signal processing units 116A and 116B read out the image signal of the SDRAM 115, convert the image signal into an image signal suitable for display, and transfer the converted image signal to the 3D image generation unit 117. Thus, the first and second digital signal processors 116A and 116B generate an image signal for the right eye and an image signal for the left eye suitable for display, and the 3D image generator 117 displays the image signal on the monitor DISP.
- the main CPU 100 After the image signal for the right eye for display and the image signal for the left eye are generated, the main CPU 100 causes the image signal for the right eye and the image signal for the left eye in the 3D image generation unit 117 to be bus Bus It supplies to the compression / decompression processing unit 150 by using. After the main CPU 100 causes the compression / decompression processing unit 150 to compress the image data, the compressed image data is transferred to the media control unit using the bus Bus, and header information related to the compression and photographing. Are supplied to the media control unit 160, the media control unit 160 generates an image file, and the memory card 161 records the image file.
- the focusing lenses are arranged at the correct focusing positions in almost the same time as before.
- 2 also includes a flash 181 which emits a flash from the light emission window WD of FIG. 1 in response to an instruction from the flash control unit 180 and the flash control unit 180 and a clock unit W for detecting the current time, Furthermore, an attitude detection sensor 190 for detecting the attitude of the imaging device 1 is illustrated.
- the main CPU 100, the first and second F lens drive units 104A and 104B, the first and second focus lenses FLA and FLB, the flash ROM 102, the AF detection unit 120, and the search range setting unit 121 An example of the in-focus position determination means according to the present invention is configured.
- the main CPU 100 instructs the first and second F lens drive units 104A and 104B to move the first and second focus lenses to make the AF detection unit 120 move in order to make it easier to understand the operation described so far.
- a focusing position determination method to be performed will be described in an easy-to-understand manner with reference to FIGS. 3 and 4.
- the main CPU 100 instructs the first F lens drive unit 104A and the second F lens drive unit 104B to move the first and second focus lenses FLA and FLB to the AF detection unit 120. It is a figure explaining the focusing position determination method to make it go.
- FIG. 4 is a diagram for explaining the processing content of the search range setting unit.
- FIG. 3A shows a first search area of the first focus lens FLA
- FIG. 3B shows a second search area of the second focus lens FLB.
- the main CPU 100 causes the first F lens drive unit 104A to move the first focus lens FLA in the first search area (Pn to Pf) while the AF detection unit 120 is set for contrast.
- the focus position is searched by detecting the maximum.
- the main CPU 100 receives the in-focus position P1 at which the AF evaluation value (contrast) detected by the AF detection unit 120 is maximum, and instructs the first F lens drive unit 104A to set the in-focus position P1 of the focus lens FLA. Move to and stop.
- the AF detection unit 120 inputs the in-focus position P1 to the search range setting unit 121 and reads out the constants (the near side deviation N and the far side deviation F) related to the second search area from the flash ROM 102 Then, the search range setting unit 121 is caused to calculate the second search area.
- the main CPU 100 receives the calculation result via the bus Bus and instructs the second F lens drive unit 104B to move the second focus lens FLB in the second search range (Pn 'to Pf').
- the AF detection unit 120 is made to search for the in-focus position.
- the main CPU 100 receives the in-focus position P2 at which the AF evaluation value (contrast) of the second imaging unit 1B detected by the AF detection unit 120 is maximum, and instructs the second F lens drive unit 104A to focus lens FLB Is stopped at the in-focus position P2.
- the search range setting unit 121 in the search range setting unit 121, the in-focus position P1 of the first focus lens FLA detected by the AF detection unit 120 and the near side deviation N stored in advance in the flash ROM 102.
- a combination of data representing the near side deviation N and the far side deviation F can eliminate the solid-state difference between the first imaging unit 1A and the second imaging unit 1B. It is assumed that a plurality of focal lengths and a plurality of focal positions are stored.
- the main CPU 100 receives this calculation result and instructs the second F lens drive unit 104B to set the second focus lens FLB in the second search area (Pn 'to Pf') narrower than the first search area.
- the AF position detection unit 120 searches for the in-focus position P2 and receives the in-focus position, and instructs the second lens driving unit 104B to arrange the second focus lens FLB.
- FIG. 5 is a flowchart showing the procedure of the in-focus position determination that the main CPU 100 executes in cooperation with the DSP that constitutes the AF detection unit 120, the AE / AWB detection unit 130, and the like.
- step S501 the main CPU 100 determines whether the shutter button 10C has been half-pressed. If the main CPU 100 determines in step S501 that the shutter button 10C is not half-pressed, the process proceeds to No and repeats the process of step S501. If the main CPU 100 determines that the shutter button 10C is half-pressed in step S501, the process proceeds to Yes .
- the AE / AWB detection unit 130 in the DSP starts an AE operation in response to a process start instruction from the main CPU 100 in step S502, and the process proceeds to step S503, and the AF detection unit 120 in the DSP Start AF operation.
- step S504 the main CPU 100 first sets the first search area (Pn to Pf in FIG. 4) in the first F lens drive unit 104A, and in the next step S505.
- the AF detection unit 120 detects the in-focus position while moving the first focus lens FLA of the first imaging optical system.
- step S506 the main CPU 100 receives the first F lens in response to the AF detection unit 120 having acquired the in-focus position P1 of the first focus lens FLA in the photographing optical system included in the first photographing unit 1A.
- the drive unit 104A By instructing the drive unit 104A, the first focus lens FLA is stopped at the first focus position P1.
- Main CPU 100 receives the calculation result and sets search start position Pn 'and search end position Pf' in second F lens drive unit 104B, and moves focus lens FLB in the second search range in step S508.
- the AF detection unit 120 detects the second in-focus position P2 while causing the second focus position P2.
- the main CPU 100 acquires the in-focus position P2 from the AF detection unit 120 in step S509, and instructs the second F lens drive unit 104B in step S510.
- the second focus lens FLB is moved to its in-focus position P2 and stopped.
- the main CPU 100 waits for full depression of the shutter button 10C in step S512. If the main CPU 100 determines that the shutter button 10C is not fully pressed in this step S512, the process proceeds to No and repeats the processing of step S512, and if it is determined that the shutter button 10C is fully pressed, the process proceeds to Yes and the photographing process is executed. End the processing of this flow.
- step S504 to step S506 corresponds to an example of the process of the first step according to the present invention
- the process from step S507 to step S510 is the process of the second step according to the present invention. It corresponds to an example.
- the first imaging unit 1A and the second imaging unit 1A take about the same time as in the prior art. An accurate focusing position determination in which a solid difference with the imaging unit 1B is eliminated is performed.
- FIG. 6 is a diagram showing a second embodiment.
- FIG. 6 A block diagram substantially the same as FIG. 2 is shown in FIG. 6, and the portion of the search range setting unit 121 of FIG. 2 is replaced with the in-focus position calculation unit 121A.
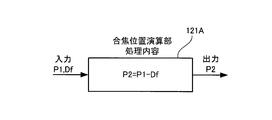
- FIG. 7 after the main CPU 100 instructs the first F lens driver 104A to move the first focus lens while causing the AF detection unit 120 to perform the operation, the flash ROM 102 for the second focus lens is used. It is a figure explaining the focus position determination method changed to the structure which moves the 2nd focus lens FLB to a focus position, and is stopped using deviation Df of the inside. Further, FIG. 8 is a diagram for explaining the processing contents of the in-focus position calculation unit 121A.
- the main CPU 100 instructs the second F lens drive unit 104B to make the second focus lens FLB a short second including the in-focus expected position corresponding to the in-focus position of the first focus lens.
- the deviation of the in-focus position representing the solid difference between the first imaging unit 1A and the second imaging unit 1B at the time of manufacture before the imaging device 1 is shipped to the market The deviation is stored in advance in the flash ROM 102, and at the time of shooting, the AF detection unit 120 is made to detect the first focusing position P1 while moving only the first focusing lens, and then the second focusing lens For FLB, the AF search while moving the second focus lens FLB is omitted, and the second focus position P2 is calculated using the deviation Df in the focus position calculation unit 121A, and the second position is calculated.
- a configuration has been proposed in which the focus lens is moved and stopped.
- the main CPU 100, the first and second F lens drive units 104A and 104B, the first and second focus lenses FLA and FLB, the flash ROM 102, the AF detection unit 120, and the in-focus position calculation unit An example of the in-focus position determination means according to the present invention is constituted by 121A.
- FIG. 7A shows the first search area of the first focus lens FLA
- FIG. 7B shows the in-focus position calculation unit 121A without searching the second focus lens FLB. It is shown that the second focus lens is moved to the second in-focus position P2 calculated to be stopped.
- the main CPU 100 instructs the F lens drive unit 104A to move the first focus lens FLA in the first search area (Pn to Pf) while focusing on the AF detection unit 120. It is the same as the first embodiment up to the point of detecting P1.
- the AF detection unit 120 supplies the in-focus position P1 of the first focus lens to the in-focus position calculation unit 102A and the deviation Df from the flash ROM 102.
- the AF search is completed in the same time as in the related art, and the solid difference between the first imaging unit and the second imaging unit is The first and second focus lenses are disposed at the correct in-focus position after cancellation.
- the in-focus positions of the first and second focus lenses FLA and FLB change. Deviations for different focal distances are recorded in the flash ROM 102, and the AF detection unit 120 receives current focal distance information from the main CPU 100 and reads out the deviation according to the focal distance information.
- the arrangement may be made without searching.
- the solid-state difference between the first imaging unit and the second imaging unit is eliminated as in the first embodiment, and the first imaging unit 1A includes the second imaging unit.
- An accurate focusing position can be obtained for each of the first focus lens and the second focus lens provided in the second imaging unit 1B.
- the second focus lens FLB is moved and stopped at a position deviated from the first focus position by the deviation Df without moving the second focus lens. Since there is, the AF search ends in almost the same time as in the past.
- FIG. 9 is a flowchart showing a processing procedure of in-focus position determination in which the main CPU 100 of the second embodiment executes processing in cooperation with a DSP that constitutes the AF detection unit 120 and the like.
- step S507 Since the process of step S507 is changed to step S507A and the process of step S508 and step S509 is omitted, the process is the same as the process of the flow of FIG.
- step S507A the AF detection unit 120 reads the deviation Df from the flash ROM 102 and supplies it to the in-focus position calculation unit 102A to calculate the in-focus position P2 of the second focus lens FLB.
- step S510 the main CPU 100 focuses on The focus position P2 calculated by the position calculation unit 121A is received, and the F lens drive unit 104B is instructed to move the focus lens FLB to the focus position P2 and stop it.
- step S504 to step S506 corresponds to an example of the process of the first step according to the present invention
- the process from step S507A to step S510 is the process of the second step according to the present invention. It corresponds to an example.
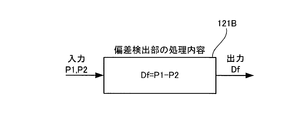
- FIG. 10 is a view showing an internal configuration of the photographing apparatus of FIG. 1 similarly to FIG. 2 and is a view showing the same configuration as FIG. 2 except that the search range setting unit 121 is replaced by the deviation detection unit 121B. It is. Also, in FIG. 11, the main CPU 100 instructs the first F lens drive unit 104A and the second F lens drive unit 104B at the time of the first shooting to move the first and second focus lenses FLA and FLB.
- the AF detection unit 120 detects the first and second in-focus positions P1 and P2 and stores the deviation Df of the in-focus position in the DRAM 115, and drives the first F lens in the next and subsequent photographing.
- the unit 104A instructs the AF detection unit 120 to detect the first focus position P1 while moving the first focus lens FLA, and the deviation detection unit is supplied with the deviation Df and the first focus position P1. It is a figure explaining the focusing position determination method of calculating the 2nd focusing position of the 2nd focus lens FLB. Moreover, FIG. 12 is a figure explaining the processing content of the deviation detection part 121B.
- the second focus lens is moved to the in-focus position P1 and stopped using the focusing position determination method of the first embodiment at the time of the first shooting, and the first shooting at the time of the first shooting
- AF detection is performed using the in-focus position determination method of the second embodiment in the subsequent imaging
- the unit 120 reads the deviation Df from the SDRAM 115 and supplies it to the deviation detection unit 121B to cause the deviation detection unit 121B to calculate the second focus position P2, and the main CPU 100 calculates the second focus position P2 as the deviation detection unit 121B.
- the second driving unit 104B to move the second focus lens FLB to a position deviated by the deviation Df and stop the position.
- the main CPU 100 the first and second F lens drive units 104A and 104B, the first and second focus lenses FLA and FLB, the flash ROM 102, the AF detection unit 120, and the deviation detection unit 121B.
- An example of the in-focus position determination means according to the present invention is configured.
- the main CPU 100 instructs the first F lens drive unit 104A and the second F lens drive unit 104B to move the first and second focus lenses while the AF detection unit 120 is moved.
- the AF search is performed while moving the first focus lens FLA and the second focus lens FLB. It is shown that. Further, in FIGS. 11C and 11D, in the second and subsequent shootings, the AF search is performed while moving the first focus lens FLA, and the first shooting for the second focus lens FLB. It is shown that the second focus lens is placed at the in-focus position using the deviation obtained by
- the main CPU 100 instructs the first F lens drive unit 104A to execute the first search area (Pn to Pf).
- the AF detection unit 120 is made to search for the in-focus position while moving the focus lens FLA.
- the main CPU 100 receives the in-focus position P1 at which the AF evaluation value (contrast) detected by the AF detection unit 120 is maximum, and instructs the first F lens drive unit 104A to set the in-focus position P1 of the focus lens FLA. Stop it.
- the AF detection unit 120 inputs the in-focus position P1 to the deviation detection unit 121, reads out the constants (the near side deviation N, the far side deviation F) related to the second search area from the flash ROM 102, and outputs the same to the deviation detection unit 121B.
- the transfer is performed, and the deviation detection unit 121B is caused to calculate the second search area.
- the main CPU 100 receives the calculation result via the bus Bus and instructs the second F lens drive unit 104B to move the second focus lens FLB in the second search range (Pn 'to Pf'). In the meantime, the AF detection unit 120 is made to search for the in-focus position.
- the main CPU 100 receives the in-focus position P2 at which the AF evaluation value (contrast) of the second imaging unit 1B detected by the AF detection unit 120 is maximum, and instructs the second F lens drive unit 104A to focus lens FLB Is stopped at the in-focus position P2.
- the deviation detection unit 121B calculates the deviation Df between the first in-focus position P1 and the second in-focus position P2 using the equation P1-P2, and calculates the deviation Df in the SDRAM 115.
- the main CPU 100 instructs the first F lens driving unit 104A to set the first focus lens FLA in the first search area (Pn After the AF detection unit 120 detects the in-focus position P1 while moving from Pf to Pf), the AF detection unit 115 reads the deviation Df in the SDRAM 115 and supplies the deviation Df to the deviation detection unit 121B.
- the in-focus position P2 of the second focus lens FLB of the second photographing unit 1B is calculated, and the main CPU 100 receives the in-focus position P2 and instructs the second F lens drive unit 104B to perform the second focus lens FLB. Is moved to its in-focus position P2 and stopped.
- FIG. 13 is a flowchart showing the procedure of the in-focus position determination that the main CPU 100 executes in cooperation with the DSP.
- step S501 the main CPU 100 determines whether the shutter button 10C has been half-pressed. If the main CPU 100 determines in step S501 that the shutter button 10C is not half-pressed, the process proceeds to No, and the process of step S501 is repeated. If it is determined in step S501 that the shutter button 10C is half-pressed, the process proceeds to Yes . If YES in step S502, the AE / AWB detection unit 130 in the DSP starts an AE operation in response to a process start instruction from the main CPU 100 in step S502, and proceeds to step S503A to determine whether the first shooting is performed.
- step S503A determines in step S503A that the first shooting is to be performed. If the main CPU 100 determines in step S503A that the first shooting is to be performed, the process proceeds to Yes, and upon receiving a shooting start instruction from the main CPU 100, the AF detection unit starts an AF operation. More specifically, it is determined whether or not the first photographing is performed in step S503A based on whether or not the value of the effective deviation Df is stored in the SDRAM 115.
- step S504 the main CPU 100 first sets the first search area (Pn to Pf in FIG. 4) in the first F lens driver 104A, and in the next step S505 the first focus of the first imaging optical system
- the AF detection unit 120 detects the in-focus position while moving the lens FLA.
- step S506 the main CPU 100 receives the first F lens in response to the AF detection unit 120 having acquired the in-focus position P1 of the first focus lens FLA in the photographing optical system included in the first photographing unit 1A.
- the drive unit 104A By instructing the drive unit 104A, the first focus lens FLA is stopped at the first focus position P1.
- step S507 the AF detection unit 120 supplies the in-focus position P1 to the deviation detection unit 121B, and the near side deviation N and the far side deviation F are read from the flash ROM 102 and supplied to the deviation detection unit 121.
- the second search area is calculated using the equation of FIG.
- the main CPU 100 acquires the second search area from the deviation detection unit 121B, and sets the search start position Pn 'and the search end position Pf' in the second F lens drive unit 104B in step S508.
- step S509 the AF detection unit 120 detects the in-focus position P2 while moving the focus lens FLB in the second search range.
- step S510 the main CPU 100 receives the in-focus position P2 from the AF detection unit 120 and instructs the second F lens drive unit 104B to move the second focus lens FLB to the in-focus position P2 and stop it.
- the AF detection unit 120 causes the deviation detection unit 121B to calculate the deviation between the in-focus position P1 and the in-focus position P2, and stores the deviation in the SDRAM 115.
- step S512 the main CPU 100 waits for full depression of the shutter button 10C in step S512. If the main CPU 100 determines that the shutter button 10C is not fully pressed in this step S512, the process proceeds to No and repeats the processing of step S512, and if it is determined that the shutter button 10C is fully pressed, the process proceeds to Yes and the photographing process is executed. Do.
- the first shooting process ends here.
- step S514 the first search area (Pn to Pf in FIG. 11C) is first set in the first F lens drive unit 104A.
- the AF detection unit 120 is made to detect the in-focus position while moving the first focus lens FLA of the first imaging optical system. Then, based on the in-focus position P1 detected by the AF detection unit 120, the first F lens drive unit 104A is instructed to move the first focus lens FLA to the in-focus position P1 and to stop it.
- step S516 the AF detection unit 120 acquires the in-focus position P1 of the first focus lens FLA in the imaging optical system included in the first imaging unit 1A and supplies it to the deviation detection unit 121B.
- the deviation Df of the above is read out and supplied to the deviation detection unit 121B.
- the main CPU 100 receives the second focus position P2 from the deviation detection unit 121B and instructs the second lens drive unit 104B to move the second focus lens to the second focus position P2 and stop it.
- the processing from step S504 to step S509 of the flow related to the first photographing on the right side of FIG. 13 corresponds to an example of the processing of the first step in the present invention.
- the processing of step S5091 of the flow according to the present invention corresponds to an example of the processing of the second step according to the present invention, and the processing from step S514 to step S517 of the flow related to the second and subsequent photographing on the left side of FIG. It corresponds to an example of processing of the 3rd step said to.
- the AF search is completed in approximately the same time as in the conventional case, and a solid between the first and second shooting units The difference is eliminated and the accurate focusing position determination is performed, and in the next and subsequent photographings, as in the second embodiment, the AF search is ended in the same time as in the prior art, and the first photographing unit and the first photographing unit The individual differences between the two imaging units are eliminated, and accurate focusing position determination is performed.
- the deviation Df is stored in the SDRAM 115.
- the deviation Df may be stored in the flash ROM 102. If the configuration is stored in the flash ROM 102, it is not necessary to store the deviation in the first shooting after the power is turned off and the power is turned on. If a non-volatile flash ROM which can be rewritten even after mounting is used, it is not necessary to store the data in the flash ROM at the time of manufacture as in the second embodiment, and the photographer can operate every week or month by operation.
- the present invention can be extended to a configuration in which the deviation is freely stored in the deviation storage unit.
- the imaging apparatus for performing stereoscopic imaging has been described.
- the present invention may be an imaging apparatus for performing panoramic imaging with two imaging units, and the sensitivity may be different between the two imaging units.
- the imaging apparatus may perform imaging with a different color, or may perform imaging with different colors in two imaging sections.
- the imaging apparatus may perform imaging with different brightness in each of the two imaging sections. Also good.
- the focusing position determination method of the present invention is applicable to any imaging device.
- 1 Shooting device 1A First shooting unit 1B Second shooting unit 100 Main CPU 101 ROM 102 Flash ROM 104A first F lens drive unit 104B second F lens drive unit 110A first imaging optical system 110B second imaging optical system 111A first imaging device 111B second imaging device 112A first analog signal processing unit 112B second analog signal processing unit 116A first digital signal processing unit 116B second digital signal processing unit 120 AF detection unit 121 search range setting unit 121A focusing position calculation unit 121B deviation detection unit 130 AE and AWB detection unit
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Optics & Photonics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Human Computer Interaction (AREA)
- Databases & Information Systems (AREA)
- Studio Devices (AREA)
- Automatic Focus Adjustment (AREA)
- Focusing (AREA)
- Lens Barrels (AREA)
Abstract
従来と同じ程度の時間で、2つの撮影部各々の合焦位置を正確に決定することができる撮影装置、およびその撮影装置における合焦位置決定方法を提供することを目的とし、サーチ範囲設定部121は、AF検出部120が検出した第1のフォーカスレンズFLAの合焦位置P1とフラッシュROM102に記憶されている近傍側の探索領域の境界値Nと遠方側の探索領域の境界値Fとに基づいて、第2のサーチ領域となる一方の境界値Pn´をPn´=Pn+Nという式から算出するとともに他方の境界値Pf´をPf´=P1-Fという式から算出し、メインCPU100は、この算出結果を受け取って第2のFレンズ駆動部104Bに指示して、第2のフォーカスレンズFLBを第1のサーチ領域よりも狭い第2のサーチ領域(Pn´からPf´)で移動させながら合焦位置P2をAF検出部120に探索させる。
Description
本発明は、第1の撮影部と第2の撮影部とを備え、これらの2つの撮影部を使って撮影を行なう撮影装置およびその撮影装置における合焦位置決定方法に関する。
従来より2つの撮影部を備えた撮影装置が数多く提案されている(特許文献1、2参照)。このように2つの撮影部が備えられていると、2つの撮影部を使って超広角のパノラマ撮影や2つの撮影部各々で異なる感度での撮影等を行なうことができる。上記特許文献1、2等の中には、立体撮影を行なうことができるものもある。
2つの撮影部で上記立体撮影を行なうものにあっては、2つの撮影部が、右眼、左眼に相当する位置に視差を持たせて並べられて設けられており、双方の撮影部から出力された画像信号に基づいて後段の信号処理部で右眼用の画像信号と左眼用の画像信号とが各々生成される。こうして撮影装置の信号処理部で生成された右眼用の画像信号と左眼用の画像信号とが、非特許文献1にあるような3次元表示が可能な表示画面を有する表示装置に入力されると、その表示画面上に立体画像が表示される。
ところで、デジタルカメラにおいては、ピント調整、つまり合焦位置の調整を行なうにあたって、内部に配備されている合焦位置決定手段が、撮影光学系内のフォーカスレンズを所定のサーチ領域内で移動させそのフォーカスレンズを移動させている間中コントラストを検出してコントラストが最大となる位置をフォーカスレンズの合焦位置とする、いわゆるAF(Auto Focus)サーチを行なっているものが多い。
上記特許文献1の撮影装置においては、2つの撮影部が同じ被写体を捉えているということを理由に、一方の撮影部のみでAFサーチを実施しそのAFサーチの結果を他方の撮影部に反映することで、2つの撮影部を有する撮影装置のAFサーチに要する時間の短縮化が図られている。また特許文献2の撮影装置には、内部の合焦位置決定手段に、双方の撮影部が備えるフォーカスレンズを相互に逆の方向にそれぞれ移動させるというAFサーチを行わせて、双方の撮影部のうち、先に合焦位置を検出した撮影部の方のAFサーチ結果を使って双方の撮影部の合焦位置を決定するという技術が提案されている。
しかし2つの撮影部には、フォーカスレンズのレンズ径やレンズ鏡胴の径や撮像素子の受光感度のばらつき等がどうしても存在する(以降の記載においてはこれらを総称して固体差という)。このため、上記特許文献1,2のように一方の撮影部の合焦位置を他方の撮影部に反映させる構成にすると、その固体差により他方の撮影部の合焦位置がずれてしまう。
インターネット<URL: http://www.3dc.gr.jp/jp/act_rep/050902/Yuuki.pdf>
本発明は、上記事情に鑑み、従来と同じ程度の時間で、2つの撮影部各々の合焦位置を正確に決定することができる撮影装置、およびその撮影装置における合焦位置決定方法を提供することを目的とする。
上記目的を達成する本発明の第1の撮影装置は、
第1のフォーカスレンズを含む第1の撮影光学系と、該第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が上記第1の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部と、
第2のフォーカスレンズを含む第2の撮影光学系と、該第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が上記第2の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部と、
上記第1のフォーカスレンズを所定の第1のサーチ領域内で移動させながら合焦位置を探索して該第1のフォーカスレンズを合焦位置に停止させ、上記第2の撮影光学系については、上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した上記第2のフォーカスレンズの合焦期待位置を含む、上記第1のサーチ領域よりも狭い第2のサーチ領域内で移動させながら合焦位置を探索して、該第2のフォーカスレンズを合焦位置に停止させる合焦位置決定手段とを備えたことを特徴とする。
第1のフォーカスレンズを含む第1の撮影光学系と、該第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が上記第1の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部と、
第2のフォーカスレンズを含む第2の撮影光学系と、該第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が上記第2の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部と、
上記第1のフォーカスレンズを所定の第1のサーチ領域内で移動させながら合焦位置を探索して該第1のフォーカスレンズを合焦位置に停止させ、上記第2の撮影光学系については、上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した上記第2のフォーカスレンズの合焦期待位置を含む、上記第1のサーチ領域よりも狭い第2のサーチ領域内で移動させながら合焦位置を探索して、該第2のフォーカスレンズを合焦位置に停止させる合焦位置決定手段とを備えたことを特徴とする。
上記本発明の第1の撮影装置によれば、上記合焦位置決定手段が、上記第1の撮影光学系については第1のフォーカスレンズを所定の第1のサーチ領域内でAFサーチを実行し、第2の撮影光学系については、上記第1のフォーカスレンズの合焦位置に対応する合焦期待位置を含む、その第1のサーチ領域よりも狭い第2のサーチ領域内でAFサーチを実施する。つまり、上記合焦位置決定手段は、第1の撮影光学系の合焦位置に対応する上記合焦期待位置に第2の撮影光学系内の第2のフォーカスレンズをそのまま配置せずに、第2の撮影光学系と第1の撮影光学系との固定差を解消するように第2のフォーカスレンズをその合焦期待位置を含む、上記第1のサーチ領域よりも狭い第2のサーチを移動させながら合焦位置を探索してから第2のフォーカスレンズを合焦位置に移動させ停止させる。
その結果、第1の撮影光学系と第2の撮影光学系との間の固体差が解消され、第1のフォーカスレンズと第2のフォーカスレンズが的確な合焦位置に各々配置される。このときには、第2のフォーカスレンズをサーチさせる距離が上記第1のサーチよりも短い区間に限定されるためにさほど時間が係ることもなく従来とほぼ同じ程度の時間でAFサーチが終了する。
上記目的を達成する本発明の第2の撮影装置は、
第1のフォーカスレンズを含む第1の撮影光学系と、その第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が上記第1の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部と、
第2のフォーカスレンズを含む第2の撮影光学系と、その第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が上記第2の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部と、
上記第2のフォーカスレンズの合焦位置の、上記第1のフォーカスレンズの合焦位置からの偏差を不揮発的に記憶しておく偏差記憶部と、
上記第1の撮影光学系について、上記第1のフォーカスレンズを移動させながら合焦位置を探索してその第1のフォーカスレンズを合焦位置に停止させ、上記第2の撮影光学系については、上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した上記第2のフォーカスレンズの合焦期待位置よりも上記偏差記憶部に記憶された偏差だけ偏倚した位置に移動させる合焦位置決定手段とを備えたこと特徴とする。
第1のフォーカスレンズを含む第1の撮影光学系と、その第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が上記第1の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部と、
第2のフォーカスレンズを含む第2の撮影光学系と、その第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が上記第2の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部と、
上記第2のフォーカスレンズの合焦位置の、上記第1のフォーカスレンズの合焦位置からの偏差を不揮発的に記憶しておく偏差記憶部と、
上記第1の撮影光学系について、上記第1のフォーカスレンズを移動させながら合焦位置を探索してその第1のフォーカスレンズを合焦位置に停止させ、上記第2の撮影光学系については、上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した上記第2のフォーカスレンズの合焦期待位置よりも上記偏差記憶部に記憶された偏差だけ偏倚した位置に移動させる合焦位置決定手段とを備えたこと特徴とする。
ここで上記偏差記憶部には、例えばこの撮影装置を製造しているときに、第1の撮影部と第2の撮影部との間の固体差を示す合焦位置の偏差を予め取得して記憶しておけば良い。
上記本発明の第2の撮影装置によれば、上記合焦位置決定手段が、上記第1の撮影光学系については第1のフォーカスレンズを所定の第1のサーチ領域内でAFサーチを実行し、第2の撮影光学系については、その第1の撮影部側のAFサーチで検出された合焦期待位置に第2のフォーカスレンズを配置せずに、その合焦期待位置よりも上記偏差記憶部に記憶された偏差だけ偏倚した位置に第2のフォーカスレンズを移動させ停止させる。
つまり、上記合焦位置決定手段は、第1の撮影光学系の合焦位置に対応する上記合焦期待位置に第2の撮影光学系内の第2のフォーカスレンズをそのまま配置せずに、第2の撮影光学系と第1の撮影光学系との間の固定差を解消するように第1のフォーカスレンズをその合焦期待位置よりも上記偏差記憶部に記憶された偏差だけ偏倚した位置に第2のフォーカスレンズを移動させ停止させることになる。その結果、第1の撮影光学系と第2の撮影光学系との間の固体差が解消され、第1のフォーカスレンズと第2のフォーカスレンズが的確な合焦位置に各々配置される。このときには、従来とほぼ同じ時間でAFサーチが終了する。
上記目的を達成する本発明の第3の撮影装置は、
第1のフォーカスレンズを含む第1の撮影光学系と、その第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が上記第1の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部と、
第2のフォーカスレンズを含む第2の撮影光学系と、その第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が上記第2の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部と、
上記第1および第2のフォーカスレンズ駆動部各々に指示し上記第1および第2のフォーカスレンズ各々を光軸方向に移動させながら各々の合焦位置を探索しその第1及びその第2のフォーカスレンズ各々を各々の合焦位置に停止させる合焦位置決定手段と、
上記合焦位置決定手段により探索された上記第2のフォーカスレンズの合焦位置の、上記合焦位置決定手段により探索された上記第1のフォーカスレンズの合焦位置からの偏差を記憶する偏差記憶部とを備え、
上記合焦位置決定手段は、上記偏差記憶部に上記偏差が記憶されている場合には、第1の撮影光学系について、上記第1のフォーカスレンズを移動させながら合焦位置を探索してその第1のフォーカスレンズを合焦位置に停止させ、上記第2の撮影光学系については、上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した上記第2のフォーカスレンズの合焦期待位置よりも上記偏差記憶部に記憶された偏差だけ偏倚した位置に移動させることを特徴とする。
第1のフォーカスレンズを含む第1の撮影光学系と、その第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が上記第1の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部と、
第2のフォーカスレンズを含む第2の撮影光学系と、その第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が上記第2の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部と、
上記第1および第2のフォーカスレンズ駆動部各々に指示し上記第1および第2のフォーカスレンズ各々を光軸方向に移動させながら各々の合焦位置を探索しその第1及びその第2のフォーカスレンズ各々を各々の合焦位置に停止させる合焦位置決定手段と、
上記合焦位置決定手段により探索された上記第2のフォーカスレンズの合焦位置の、上記合焦位置決定手段により探索された上記第1のフォーカスレンズの合焦位置からの偏差を記憶する偏差記憶部とを備え、
上記合焦位置決定手段は、上記偏差記憶部に上記偏差が記憶されている場合には、第1の撮影光学系について、上記第1のフォーカスレンズを移動させながら合焦位置を探索してその第1のフォーカスレンズを合焦位置に停止させ、上記第2の撮影光学系については、上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した上記第2のフォーカスレンズの合焦期待位置よりも上記偏差記憶部に記憶された偏差だけ偏倚した位置に移動させることを特徴とする。
ここで上記偏差記憶部に偏差が記憶されている場合というのは、例えばその偏差記憶部が揮発性のメモリで構成されているときには電源が一旦オフされ再度電源スイッチがオンされた後の2回目以降の撮影の場合を指す。
したがって、上記本発明の第3の撮影装置では、例えば初回の撮影については上記合焦位置決定手段が、まず上記第1および第2のフォーカスレンズ駆動部各々に指示し上記第1および第2のフォーカスレンズ各々を光軸方向に移動させながら各々の合焦位置を探索しその第1及びその第2のフォーカスレンズ各々を各々の合焦位置に停止させる。この初回の撮影時に探索した上記第2のフォーカスレンズの合焦位置の、上記第1のフォーカスレンズの合焦位置からの偏差を上記偏差記憶部に記憶しておいて2回目以降の撮影については上記合焦位置決定手段が上記第1の撮影光学系については第1のフォーカスレンズを所定の第1のサーチ領域内でAFサーチを実行し、第2の撮影光学系については第2の撮影光学系と第1の撮影光学系との間の固定差を解消するように第2のフォーカスレンズを上記偏差記憶部に記憶された偏差だけ偏倚させた位置に第2のフォーカスレンズを移動させ停止させる。
その結果、どの撮影回においても第1の撮影光学系と第2の撮影光学系との間の固体差が解消され、第1のフォーカスレンズと第2のフォーカスレンズが的確な合焦位置に各々配置される。初回の撮影時には、第2のフォーカスレンズをサーチさせる距離が上記第1のサーチよりも短い区間に限定されるためにさほどの時間が係ることがなく従来とほぼ同じ程度の時間でAFサーチが終了し、それ以降については、従来とほぼ同じ時間でAFサーチが終了する。
なお上記では電源投入後の2回目以降の撮影を上記偏差記憶部に偏差が記憶されている場合の例として掲げたが、上記偏差記憶部に記憶されている場合の中には、例えばズームスイッチが操作されて焦点距離が変更された後で一度撮影が行なわれ偏差が偏差記憶部に記憶された後、同じ焦点距離で撮影が再度行なわれるような場合等も含まれる。
また、上記偏差記憶部が例えば不揮発性のメモリで構成されている場合には、例えばリセット操作でその不揮発性メモリの内容が消去されることもある。このような構成の場合には、リセットされた後の2回目以降の撮影が、上記偏差が記憶されている場合に該当する。
ここで、上記第1の撮影光学系および上記第2の撮影光学系双方が焦点距離可変であって互いに同一の焦点距離に調整されるものであり、
上記偏差記憶部は、上記偏差を、複数の焦点距離それぞれについて記録するものであることが好ましい。
上記偏差記憶部は、上記偏差を、複数の焦点距離それぞれについて記録するものであることが好ましい。
そうすると、ユーザによりズームスイッチが操作されて焦点距離が変更されても、焦点距離に対応した偏差を用いることで第1及び第2のフォーカスレンズが双方ともに的確な合焦位置に配置される。
また、上記第1の撮影光学系および上記第2の撮影光学系が、並べて配置され立体視用の画像信号を生成するものであることが好ましい。
そうすると、第1の撮影光学系と第2の撮影光学系とで、それぞれ、ピントのあった右眼用の画像信号と左眼用の画像信号とが得られる。
また、上記目的を達成する本発明の第1の合焦位置決定方法は、
第1のフォーカスレンズを含む第1の撮影光学系と、その第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が上記第1の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部、および、第2のフォーカスレンズを含む第2の撮影光学系と、その第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が前記第2の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部からなる双方の撮影部を備えた撮影装置における合焦位置決定方法であって、
上記第1のフォーカスレンズを所定の第1のサーチ領域内で移動させながら合焦位置を探索してその第1のフォーカスレンズを合焦位置に停止させる第1のステップと、
上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した第2のフォーカスレンズの合焦期待位置を含む、上記第1のサーチ領域よりも狭い第2のサーチ領域内で移動させながら合焦位置を探索してその第2のフォーカスレンズを合焦位置に停止させる第2のステップとを有することを特徴とする。
第1のフォーカスレンズを含む第1の撮影光学系と、その第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が上記第1の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部、および、第2のフォーカスレンズを含む第2の撮影光学系と、その第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が前記第2の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部からなる双方の撮影部を備えた撮影装置における合焦位置決定方法であって、
上記第1のフォーカスレンズを所定の第1のサーチ領域内で移動させながら合焦位置を探索してその第1のフォーカスレンズを合焦位置に停止させる第1のステップと、
上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した第2のフォーカスレンズの合焦期待位置を含む、上記第1のサーチ領域よりも狭い第2のサーチ領域内で移動させながら合焦位置を探索してその第2のフォーカスレンズを合焦位置に停止させる第2のステップとを有することを特徴とする。
上記本発明の第1の合焦位置決定方法によれば、上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した第2のフォーカスレンズの合焦期待位置を含む、上記第1のサーチ領域よりも狭い第2のサーチ領域内で移動させながら合焦位置を探索する構成にすることで、第1、第2のフォーカスレンズ各々が正確な合焦位置に配置される。その結果、第1の撮影光学系と第2の撮影光学系との間の固体差が解消され、第1のフォーカスレンズと第2のフォーカスレンズが的確な合焦位置に各々配置される。このときには、第2のフォーカスレンズをサーチさせる距離が上記第1のサーチよりも短い区間に限定されるためにさほど時間が係ることもなく従来とほぼ同じ程度の時間でAFサーチが終了する。
また、上記目的を達成する本発明の第2の合焦位置決定方法は、
第1のフォーカスレンズを含む第1の撮影光学系と、その第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が上記第1の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部、および、第2のフォーカスレンズを含む第2の撮影光学系と、その第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が上記第2の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部からなる双方の撮影部を備えるとともに、さらに、上記第2のフォーカスレンズの合焦位置の、上記第1のフォーカスレンズの合焦位置からの偏差を不揮発的に記憶しておく偏差記憶部を備えた撮影装置における合焦位置決定方法であって、
上記第1のフォーカスレンズを移動させながら合焦位置を探索してその第1のフォーカスレンズを合焦位置に停止させる第1のステップと、
上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した上記第2のフォーカスレンズの合焦期待位置よりも上記偏差記憶部に記憶された偏差だけ偏倚した位置に移動させる第2のステップとを有することを特徴とする。
第1のフォーカスレンズを含む第1の撮影光学系と、その第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が上記第1の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部、および、第2のフォーカスレンズを含む第2の撮影光学系と、その第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が上記第2の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部からなる双方の撮影部を備えるとともに、さらに、上記第2のフォーカスレンズの合焦位置の、上記第1のフォーカスレンズの合焦位置からの偏差を不揮発的に記憶しておく偏差記憶部を備えた撮影装置における合焦位置決定方法であって、
上記第1のフォーカスレンズを移動させながら合焦位置を探索してその第1のフォーカスレンズを合焦位置に停止させる第1のステップと、
上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した上記第2のフォーカスレンズの合焦期待位置よりも上記偏差記憶部に記憶された偏差だけ偏倚した位置に移動させる第2のステップとを有することを特徴とする。
上記本発明の第2の合焦位置決定方法によれば、上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した上記第2のフォーカスレンズの合焦期待位置よりも上記偏差記憶部に記憶された偏差だけ偏倚した位置に配置することで、従来と同じ時間で第1のフォーカスレンズと第2のフォーカスレンズとの間の固体差が解消され双方のフォーカスレンズが正確な合焦位置に配置される。
また、上記目的を達成する本発明の第3の合焦位置決定方法は、
第1のフォーカスレンズを含む第1の撮影光学系と、その第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が上記第1の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部、および、第2のフォーカスレンズを含む第2の撮影光学系と、その第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が上記第2の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部からなる双方の撮影部を備えるとともに、さらに、上記第2のフォーカスレンズの合焦位置の、上記第1のフォーカスレンズの合焦位置からの偏差を記憶する偏差記憶部を備えた撮影装置における合焦位置決定方法であって、
上記第1および第2のフォーカスレンズ駆動部各々に指示し上記第1および第2のフォーカスレンズ各々を光軸方向に移動させながら各々の合焦位置を探索しその第1及びその第2のフォーカスレンズ各々を各々の合焦位置に停止させる第1のステップと、
上記第1のステップの実行により探索された上記第2のフォーカスレンズの合焦位置の、上記第1のステップの実行により探索された上記第1のフォーカスレンズの合焦位置からの偏差を上記偏差記憶部に記憶させる第2のステップと、
上記偏差記憶部に上記偏差が記憶されている場合に上記第1ステップおよび上記第2ステップの実行に代えて実行される、上記第1の撮影光学系について、上記第1のフォーカスレンズを移動させながら合焦位置を探索してその第1のフォーカスレンズを合焦位置に停止させ、上記第2の撮影光学系については、上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した上記第2のフォーカスレンズの合焦期待位置よりも上記偏差記憶部に記憶された偏差だけ偏倚した位置に移動させる第3のステップとを有することを特徴とする。
第1のフォーカスレンズを含む第1の撮影光学系と、その第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が上記第1の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部、および、第2のフォーカスレンズを含む第2の撮影光学系と、その第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が上記第2の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部からなる双方の撮影部を備えるとともに、さらに、上記第2のフォーカスレンズの合焦位置の、上記第1のフォーカスレンズの合焦位置からの偏差を記憶する偏差記憶部を備えた撮影装置における合焦位置決定方法であって、
上記第1および第2のフォーカスレンズ駆動部各々に指示し上記第1および第2のフォーカスレンズ各々を光軸方向に移動させながら各々の合焦位置を探索しその第1及びその第2のフォーカスレンズ各々を各々の合焦位置に停止させる第1のステップと、
上記第1のステップの実行により探索された上記第2のフォーカスレンズの合焦位置の、上記第1のステップの実行により探索された上記第1のフォーカスレンズの合焦位置からの偏差を上記偏差記憶部に記憶させる第2のステップと、
上記偏差記憶部に上記偏差が記憶されている場合に上記第1ステップおよび上記第2ステップの実行に代えて実行される、上記第1の撮影光学系について、上記第1のフォーカスレンズを移動させながら合焦位置を探索してその第1のフォーカスレンズを合焦位置に停止させ、上記第2の撮影光学系については、上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した上記第2のフォーカスレンズの合焦期待位置よりも上記偏差記憶部に記憶された偏差だけ偏倚した位置に移動させる第3のステップとを有することを特徴とする。
上記本発明の第3の合焦位置決定方法によれば、例えば初回の撮影については、上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した第2のフォーカスレンズの合焦期待位置を含む、上記第1のサーチ領域よりも狭い第2のサーチ領域内で移動させながら合焦位置を探索する構成にすることで、第1、第2のフォーカスレンズ各々が正確な合焦位置に配置される。その結果、第1の撮影部と第2の撮影部との間の固体差が解消され、第1のフォーカスレンズと第2のフォーカスレンズが的確な合焦位置に各々配置される。このときには、第2のフォーカスレンズをサーチさせる距離が上記第1のサーチよりも短い区間に限定されるためにさほど時間が係ることもなく従来とほぼ同じ程度の時間でAFサーチが終了する。
さらに初回の撮影時に取得した上記偏差を上記偏差記憶部に記憶しておいて、次回以降の撮影については、上記第2のフォーカスレンズを、上記第1のフォーカスレンズの合焦位置に対応した上記第2のフォーカスレンズの合焦期待位置よりも上記偏差記憶部に記憶された偏差だけ偏倚した位置に配置することで、第1の撮影部と第2の撮影部との間の固体差が解消され、第1のフォーカスレンズと第2のフォーカスレンズが的確な合焦位置に各々配置される。このときには従来と同じ時間でAFサーチが終了する。
以上説明した様に、従来と同じ程度の時間で、2つの撮影部各々の合焦位置を正確に決定することができる撮影装置、およびその撮影装置における合焦位置決定方法が実現する。
以下、本発明の実施の形態について説明する。
図1は、本発明の一実施形態である撮影装置を示す図である。
図1(a)には、撮影装置1を斜め上方から見た斜視図が示されている。
図1(a)に示す撮影装置1には、2つの撮影部1A,1Bが備えられている。以降においてはこの2つの撮影部を第1の撮影部1Aと第2の撮影部1Bと記載して区別することにする。
この第1の撮影部1Aと第2の撮影部1Bとは、立体視用の画像信号を生成することが可能な様に並べて配置されており、これらの撮影部1A,1Bで右眼用と左眼用の画像信号がそれぞれ生成される。図1の撮影装置1の上面にある電源スイッチ10Aが操作され、撮影モードダイヤル10Bが例えば立体モードというモードにセットされてシャッタ釦10Cが操作されると、立体視用の画像データが双方の撮影部1A,1Bで生成される。
この実施形態の撮影装置1が備えるシャッタ釦10Cは半押しと全押しとの2つの操作態様を有しており、この撮影装置1では、そのシャッタ釦10Cが半押しされたときに露出調整やピント調整が実施され、全押しされたときに撮影が実施される。また、被写界輝度が暗いときには被写体に向けてフラッシュを発光するフラッシュ発光窓WDが撮影部1Bの上方に設けられている。
また、図1(b)に示す様に、背面には3次元表示が可能なモニターDISPが備えられており、そのモニターDISP上には双方の撮影部1A,1Bが捉えている同一の被写体が立体画像となって表示される。さらに、ズームスイッチ10Dやメニュー/OK釦10Eや十字キー10Fなどの操作子も配備されている。以降においては、電源スイッチ10Aやシャッタ釦10Bやモードダイヤル10Cやズームスイッチ10Dやメニュー/OK釦10Eや十字キー10Fなどを総称して操作部10と記載することがある。
図2は図1の撮影装置1の内部の構成を示すブロック図である。
図2を参照して撮影装置1の内部の構成を説明する。
この撮影装置1の動作は、統括的にメインCPU100によって制御される。
メインCPU100にはバスBusを介してROM101が接続されており、そのROM101の中にはこの撮影装置1が動作するのに必要なプログラムが格納されている。このプログラムの手順にしたがってメインCPU100は、この撮影装置1の動作を統括的に制御する。
まず、図1に示した操作部10内の電源スイッチ10Aが操作されると、メインCPU100は、電源制御部1001を制御してバッテリBTからの電力を電源制御部1001を通して図2の各部に供給させてこの撮影装置1を動作状態に移行させる。こうしてメインCPU100は撮影処理を開始する。なお、AF検出部120とサーチ範囲設定部121とAE/AWB検出部130と画像入力コントローラ114Aとデジタル信号処理部116Aと3D画像生成部117は、DSP(Digital Signal Processor)等のプロセッサで構成されているとし、メインCPU100はそのDSPと連携して処理を実行するとする。また表示制御部119とモニターDISPは、LCDで構成されているものとする。
ここで、先に図1で説明した第1の撮影部1Aと第2の撮影部1Bの内部の構成を、図2を参照して説明する。なお第1の撮影部1Aの各構成部材には‘第1の’という文言を付し、第2の撮影部1Bの各構成部材には‘第2’のという文言を付して説明する。
第1の撮影部1Aには、第1のフォーカスレンズFLAを含む第1の撮影光学系110Aと、その第1のフォーカスレンズFLAを光軸方向に移動させる第1のフォーカスレンズ駆動部(以降第1のFレンズ駆動部という)104Aと、被写体が第1の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第1の撮像素子111Aとが備えられている。この第1の撮影光学系110Aには他に第1の絞りIAが配備されており、その第1の絞りIAの開口径を変更する第1の絞り駆動部105Aが備えられている。
また、この第1の撮影光学系100Aはズームレンズになっており、そのズームレンズを所定の焦点距離にする制御を行なうZレンズ駆動部103Aも備えられている。なお、この図2には、撮影光学系全体がズームレンズであることが1枚のレンズZLで模式的に示されている。
一方、第2の撮影部1Bにも上記第1の撮影部1Aと同じ様に、第2のフォーカスレンズFLBを含む撮影光学系と、その第2のフォーカスレンズFLBを光軸に方向に移動させる第2のフォーカスレンズ駆動部(以降第2のFレンズ駆動部という)104Bと、被写体が第2の撮影光学系で結像されてなる被写体光を受光してその被写体を表わす画像信号を生成する第2の撮像素子111Bとが備えられている。
これらの第1の撮影部1Aと第2の撮影部1Bとで立体視用の画像信号、つまり第1の撮影部1Aでは右眼用の画像信号が生成され、第2の撮影部1Bでは左眼用の画像信号がそれぞれ生成される。
第1の撮影部1Aと第2の撮影部1Bとは右眼用の画像信号を生成するか、左眼用の画像信号を生成するかの違いだけで構成が全く同じであって、第1のA/D113Aと第2のA/D113Bで双方の撮影部の画像信号がデジタル信号に変換されてバスBusに導かれた後の処理も同じであるので、第1の撮影部1Aについて画像信号の流れに沿ってその構成を説明していく。
まず、第1の撮影部1Aが捉えている被写体をそのままスルー画としてモニターDISP上に表示する際の動作から説明する。
操作部10内の電源スイッチ10Aが操作されたことを受けてメインCPU100は電源制御部1001を制御して各部にバッテリBTからの電力を供給させてこの撮影装置1を動作状態に移行させる。
メインCPU100は、まず、Fレンズ駆動部104Aと絞り駆動部105Aとを制御して露出およびピントの調整を開始する。さらにTG106Aに指示して撮像素子111Aに電子シャッタを設定させ、例えば1/60秒ごとに撮像素子111Aからアナログ信号処理部112Aに画像信号を出力させる。
アナログ信号処理部112Aでは、TG106Aからのタイミング信号の供給を受け、撮像素子111Aからの1/60秒ごとの画像信号の供給を受けてノイズの低減処理等が行なわれノイズの低減処理が行なわれたアナログの画像信号が次段のA/D113Aへと供給される。このA/D113AにおいてもTG106Aからのタイミング信号に同期して1/60秒ごとにアナログの画像信号がデジタルの画像信号への変換処理が行なわれる。こうしてA/D113Aで変換され出力されてくるデジタルの画像信号が画像入力コントローラ114Aによって1/60秒ごとにバスBusに導かれ、このバスBusに導かれた画像信号はSDRAM115に記憶される。撮像素子111Aからは1/60秒ごとに画像信号が出力されるので、このSDRAM115の内容は1/60ごとに書き換えられることになる。
このSDRAM115に記憶された画像信号は、AF検出部120とAE/AWB検出部130とデジタル信号処理部116Aとを構成するDSPによって1/60ごとにそれぞれ読み出される。
AF検出部120では、メインCPU100がFレンズ駆動部104Aを制御してフォーカスレンズFLAを移動させている最中の1/60ごとにコントラストの検出が行なわれてAFサーチが実施される。このAF検出部120の検出結果に基づいてメインCPU100はFレンズ駆動部104Aに指示して第1のフォーカスレンズFLAを合焦位置に移動させ停止させる。このため、第1の撮影部1Aがどの方向に向けられてもすぐにピントが調整されて、モニターDISP上には、ほぼいつでもピントのあった被写体が表示される。
またAE/AWB検出部130では、輝度の検出とデジタル信号処理部116A内のホワイトバランスアンプに設定するゲインの算出が1/60ごとに行なわれる。メインCPU100は、このAE/AWB検出部130の輝度の検出結果に応じて絞り駆動部105Aを制御して絞りIの開口径を変更させる。またデジタル信号処理部116Aは、AE/AWB検出部130からの検出結果を受けてホワイトバランスアンプのゲインを設定する。
このデジタル信号処理部116Aでは、表示に適した画像信号になるように処理が行なわれ、そのデジタル信号処理部116Aの信号処理により表示に適したものに変換された画像信号が、3D画像生成部117へと供給されてその3D画像生成部117で表示用の右眼用の画像信号が生成され、生成された右眼用の画像信号がVRAM118に記憶される。
ここまでの動作と同じ動作が、同じタイミングで第2の撮影部1Bによっても行なわれる。
したがってVRAM118には、右眼用と左眼用との2種類の画像信号が記憶されることになる。
メインCPU100は、表示制御部119に、そのVRAM118内の右眼用の画像信号と左眼用の画像信号とを転送してモニターDISP上に画像を表示させる。図1のモニターDISP上に右眼用の画像信号と左眼用の画像信号とが重ねて表示されると、人の眼にはモニターDISP上の画像が立体的に見えるようになる。第1、第2の撮像素子111A,111Bからは1/60ごとに画像信号を出力させ続けているので、VRAM118内の画像信号は1/60ごとに書き換えられモニターDISP上の立体画像も1/60ごとに切り替えられて表示され立体画像が動画となって表示される。
ここで、そのモニターDISP上の被写体が参照され操作部10の中のシャッタ釦10Aが半押し操作されると、メインCPU100は、AE/AWB検出部130でシャッタ釦10Cが全押しされる直前に検出されたAE値を受け取って第1、第2の絞り駆動部105A,105Bに指示して第1、第2の絞りIA,IBをAE値に応じた径にさせるとともに、第1のFレンズ駆動部104Aに指示して第1のフォーカスレンズFLAを第1のサーチ領域で移動させながらAF検出部120にコントラストの検出を行なわせる。AF検出部120でコントラストの最大が検出されると、メインCPU100はそのコントラストの最大が得られた合焦位置P1を受け取って第1のフォーカスレンズFLAをその合焦位置P1に停止させる。
一方、第2の撮影光学系については、第2のフォーカスレンズFLBを、第1のフォーカスレンズFLAの合焦位置に対応した第2のフォーカスレンズFLBの合焦期待位置を含む、第1のサーチ領域よりも狭い第2のサーチ領域内で移動させながらAF検出部120に合焦位置を探索させる。メインCPU100はAF検出部120から探索結果を受け取ってその第2のフォーカスレンズFLBを探索結果が示す合焦位置に停止させる。詳細は後述するが、このときには、AF検出部120が、サーチ範囲設定部121に、第1のフォーカスレンズFLAの合焦位置P1と、フラッシュROM102から読み出したサーチ領域を示すデータ(近傍側偏差Nと遠方側偏差F)とに基づいて第1のフォーカスレンズの合焦位置に対応した合焦期待位置を含む、第1のサーチ領域よりも狭い第2のサーチ領域を算出させ、メインCPU100がその第2のサーチ領域の算出結果を受け取って第2のFレンズ駆動部104Bに指示してその第2のサーチ領域で合焦位置を探索するAFサーチを行なわせる。
このように第1の撮影部1AのフォーカスレンズFLAには従来どおりのAFサーチを行なわせ、第2の撮影部1Bには第2のフォーカスレンズFLBの合焦期待位置を含む、第1の範囲よりも狭い第2の範囲でAFサーチを行なわせても、第2の撮影部1Bについては合焦期待位置を挟んだ短い領域のAFサーチを行なわせるだけで済むので、従来とほぼ同じ程度の時間でAFサーチが終了する。
そしてシャッタ釦10Cが全押しされると、メインCPU100は、第1、第2のTG106A,106Bに電子シャッタを設定させて静止画の撮影処理を開始する。メインCPU100は、電子シャッタのオフタイミングで第1、第2の撮像素子111A,111Bから画像信号を第1、第2のアナログ信号処理部112A,112Bへと出力させ、第1、第2のアナログ信号処理部112A,112Bにノイズの低減処理を行なわせる。その後、第1、第2のA/D113A,113Bでアナログの画像信号をデジタルの画像信号に変換させる。このときには第1、第2のデジタル信号処理部116A,116BにAE/AWB検出部130で検出された全押し直前に検出されたホワイトバランス情報に基づいて内部のホワイトバランスアンプにゲインが設定されていて適切なホワイトバランス調整が行なわれる。
ここでメインCPU100の指示にしたがって第1、第2の画像入力コントローラ114Aが、第1、第2のA/D113A,113Bで変換されたデジタルの画像信号をバスBus側に導いてバスBusを経由して一旦すべての画像信号をSDRAM115に記憶する。その後、今度はデジタル信号処理部116A,116BがSDRAM115の画像信号を読み出して表示に適した画像信号に変換し変換した画像信号を3D画像生成部117へと転送する。こうして第1、第2のデジタル信号処理部116A,116Bで表示に適した右眼用の画像信号と左眼用の画像信号とが生成され、3D画像生成部117でモニターDISPに表示するための表示用の右眼用の画像信号と左眼用の画像信号が生成された後、メインCPU100は、3D画像生成部117内の右眼用の画像信号と左目用の画像信号を、バスBusを使って圧縮・伸長処理部150に供給する。メインCPU100は、この圧縮・伸張処理部150に画像データの圧縮を行なわせた後、その圧縮された画像データをメディア制御部にバスBusを使って転送するとともに、その圧縮や撮影に係るヘッダ情報をメディア制御部160に供給してメディア制御部160に画像ファイルを生成させメモリカード161にその画像ファイルを記録させる。
この実施形態の構成にすると、第1の撮影部1Aと第2の撮影部1Bとの間に固体差があっても、その固体差が解消され各々の撮影光学系の第1、第2のフォーカスレンズが的確な合焦位置にいままでとほぼ同じ時間で各々配置される。なお図2には、他にフラッシュ制御部180とそのフラッシュ制御部180からの指示を受けて図1の発光窓WDからフラッシュを発光するフラッシュ181や現在の時刻を検知するための時計部W、さらにはこの撮影装置1の姿勢を検出する姿勢検出センサ190が図示されている。
本実施形態では、メインCPU100と第1、第2のFレンズ駆動部104A,104Bと第1、第2のフォーカスレンズFLA,FLBとフラッシュROM102とAF検出部120とサーチ範囲設定部121とで、本発明にいう合焦位置決定手段の一例が構成される。
ここまで説明してきた動作をより分かり易くするためにメインCPU100が第1、第2のFレンズ駆動部104A,104Bに指示して第1、第2のフォーカスレンズを移動させながらAF検出部120に行なわせる合焦位置決定方法を、図3と図4を参照して分かり易く説明する。
図3は、メインCPU100が、第1のFレンズ駆動部104Aと第2のFレンズ駆動部104Bに指示して第1および第2のフォーカスレンズFLA,FLBを移動させながらAF検出部120に行なわせる合焦位置決定方法を説明する図である。また図4は、サーチ範囲設定部の処理内容を説明する図である。
図3(a)には、第1のフォーカスレンズFLAの第1のサーチ領域が示されており、図3(b)には第2のフォーカスレンズFLBの第2のサーチ領域が示されている。
図3(a)に示す様に、メインCPU100は第1のFレンズ駆動部104Aに第1のサーチ領域(PnからPf)で第1のフォーカスレンズFLAを移動させながらAF検出部120にコントラストの最大を検出させることにより合焦位置を探索させる。ここでメインCPU100はAF検出部120が検出したAF評価値(コントラスト)が最大となる合焦位置P1を受け取って第1のFレンズ駆動部104Aに指示してフォーカスレンズFLAをその合焦位置P1に移動させ停止させる。
その後AF検出部120は、サーチ範囲設定部121に合焦位置P1を入力するとともに、フラッシュROM102から第2のサーチ領域に関する定数(近傍側偏差N、遠方側偏差F)を読み出してサーチ範囲設定部121に転送し、サーチ範囲設定部121に第2のサーチ領域を算出させる。メインCPU100は、その算出結果をバスBusを介して受け取って第2のFレンズ駆動部104Bに指示して第2のフォーカスレンズFLBを第2のサーチ範囲(Pn´からPf´)で移動させながらAF検出部120に合焦位置を探索させる。
そしてメインCPU100はAF検出部120が検出した第2の撮影部1BのAF評価値(コントラスト)が最大となる合焦位置P2を受け取って第2のFレンズ駆動部104Aに指示してフォーカスレンズFLBをその合焦位置P2に停止させる。
つまり、図4に示す様に、サーチ範囲設定部121では、AF検出部120で検出された第1のフォーカスレンズFLAの合焦位置P1とフラッシュROM102内に予め記憶されていた近傍側偏差Nと遠方側偏差Fとに基づいて、第2のサーチ領域となるサーチ開始位置Pn´をPn´=Pn+Nという式から算出し、サーチ終了位置Pf´をPf´=P1-Fという式から算出する。なお、フラッシュROM102内には、近傍側偏差Nと遠方側偏差Fを表わすデータの組み合わせが、第1の撮影部1Aと第2の撮影部1Bとの間の固体差を解消することができるように焦点距離ごと、さらに合焦位置ごとに複数記憶されているとする。
メインCPU100はこの算出結果を受け取って第2のFレンズ駆動部104Bに指示して、第2のフォーカスレンズFLBを第1のサーチ領域よりも狭い第2のサーチ領域(Pn´からPf´)で移動させながら合焦位置P2をAF検出部120に探索させ探索させた合焦位置を受け取って第2のレンズ駆動部104Bに指示して第2のフォーカスレンズFLBを配置する。
この構成にすると、第2のフォーカスレンズFLBを第1のフォーカスレンズFLAの合焦位置に対応した合焦期待位置を含んだ狭い第2のサーチ領域をAFサーチさせるだけで済むので、従来のAF時間とさほど変わらない時間で、双方の撮影部の固体差が解消された正確な合焦位置決定が行なわれる。
最後に、メインCPU100とAF検出部120とサーチ範囲設定部121等を構成するDSPとが連携して実行する合焦位置決定処理の手順をフローチャートを参照しながら説明する。
図5は、メインCPU100がAF検出部120やAE/AWB検出部130等を構成するDSPと連携して実行する合焦位置決定の処理手順を示すフローチャートである。
ステップS501でメインCPU100が、シャッタ釦10Cが半押しされたかどうかを判定する。このステップS501でメインCPU100が、シャッタ釦10Cが半押しされていないと判定するとNo側へ進んでステップS501の処理を繰り返し、このステップS501でシャッタ釦10Cが半押しされたと判定するとYes側へ進む。そしてYes側へ進むとステップS502でメインCPU100からの処理開始指示を受けてDSP内のAE/AWB検出部130がAE動作を開始し、さらにステップS503へ進んで、DSP内のAF検出部120がAF動作を開始する。
ステップS503のAF動作の開始に伴ってステップS504で、メインCPU100が、まず第1のサーチ領域(図4のPnからPf)を第1のFレンズ駆動部104Aに設定し、次のステップS505で第1撮影光学系の第1のフォーカスレンズFLAを移動させながらAF検出部120に合焦位置の検出を行なわせる。
そしてステップS506で、AF検出部120が、第1の撮影部1Aが備える撮影光学系内の第1のフォーカスレンズFLAの合焦位置P1を取得したことを受けてメインCPU100は第1のFレンズ駆動部104Aに指示して第1のフォーカスレンズFLAをその第1の合焦位置P1に停止させる。
次のステップS507でAF検出部120がその合焦位置P1をサーチ範囲設定部121に供給するとともに、フラッシュROM102からサーチの開始位置データNとサーチの終了位置データFを読み出してサーチ範囲設定部121に供給し、サーチ範囲設定部121に第2のサーチ領域を図4に示すPn´=P1+N、Pf´=P1-Fという式を使って算出させる。メインCPU100はその算出結果を受け取って第2のFレンズ駆動部104Bにそのサーチ開始位置Pn´とサーチ終了位置Pf´とを設定して、ステップS508で第2のサーチ範囲でフォーカスレンズFLBを移動させながらAF検出部120に第2の合焦位置P2を検出させる。ステップS508で第2の合焦位置P2を検出させると、ステップS509でメインCPU100はその合焦位置P2をAF検出部120から取得して、ステップS510で第2のFレンズ駆動部104Bに指示して第2のフォーカスレンズFLBをその合焦位置P2に移動させ停止させる。ステップS511でAF動作を終了した後、ステップS512でメインCPU100はシャッタ釦10Cの全押しを待ち受ける。このステップS512でメインCPU100が、シャッタ釦10Cが全押しされないと判定するとNo側へ進んでステップS512の処理を繰り返し、シャッタ釦10Cが全押しされたと判定すると、Yes側へ進んで撮影処理を実行してこのフローの処理を終了する。
本実施形態では、ステップS504からステップS506までの処理が本発明にいう第1のステップの処理の一例に相当し、ステップS507からステップS510までの処理が本発明にいう第2のステップの処理の一例に相当する。
メインCPU100と、AF検出部120やサーチ範囲設定部121等を構成するDSPとが、図5のフローを実行すると、従来と同じ程度の時間であってしかも第1の撮影部1Aと第2の撮影部1Bとの間の固体差が解消された正確な合焦位置決定が実施される。
図6は、第2実施形態を示す図である。
この第2実施形態でも図1の外観の撮影装置1が用いられるとする。この図6には、図2とほぼ同じブロック図が示されており、図2のサーチ範囲設定部121の部分が合焦位置演算部121Aに置き換えられている。
また、図7は、メインCPU100が、第1のFレンズ駆動部104Aに指示して第1のフォーカスレンズを移動させながらAF検出部120に行なわせた後、第2のフォーカスレンズについてはフラッシュROM102内の偏差Dfを使って第2のフォーカスレンズFLBを合焦位置に移動させ停止させる構成に変更した合焦位置決定方法を説明する図である。さらに図8は合焦位置演算部121Aの処理内容を説明する図である。
第1実施形態では、メインCPU100が第2のFレンズ駆動部104Bに指示して第2のフォーカスレンズFLBを第1のフォーカスレンズの合焦位置に対応する合焦期待位置を含んだ短い第2のサーチ領域でのAFサーチを行なわせることで、従来とさほど変わらない時間で、固体差を解消し、かつ正確な合焦位置決定を可能にする構成を提案した。
これに対して第2実施形態では、この撮影装置1を市場に出荷する前の製造時に第1の撮影部1Aと第2の撮影部1Bとの間の固体差を表わす合焦位置の偏差を予め取得しその偏差をフラッシュROM102に記憶しておいて、撮影時には第1のフォーカスレンズのみを移動させながらAF検出部120に第1の合焦位置P1の検出を行なわせ、第2のフォーカスレンズFLBについては第2のフォーカスレンズFLBを移動させながらのAFサーチを省略して合焦位置演算部121Aに偏差Dfを使って第2の合焦位置P2を算出させ算出させた位置に第2のフォーカスレンズを移動させ停止させる構成を提案している。
この構成にすると、固体差を解消し、かつ正確な合焦位置決定を従来とほぼ同じ時間で行なうことができる。この第2の実施形態では、メインCPU100と第1、第2のFレンズ駆動部104A,104Bと第1、第2のフォーカスレンズFLA,FLBとフラッシュROM102とAF検出部120と合焦位置演算部121Aとで、本発明にいう合焦位置決定手段の一例が構成される。
図7を参照して第2実施形態を説明する。
図7(a)には、第1のフォーカスレンズFLAの第1のサーチ領域が示されており、図7(b)には第2のフォーカスレンズFLBをサーチさせずに合焦位置演算部121Aに算出させた第2の合焦位置P2に第2のフォーカスレンズを移動させ停止させるということが示されている。
図7(a)に示す様にメインCPU100がFレンズ駆動部104Aに指示して第1のフォーカスレンズFLAを第1のサーチ領域(PnからPf)で移動させながらAF検出部120に合焦位置P1を検出させるところまでは第1実施形態と同じである。
その後の第2のフォーカスレンズFLBの合焦位置決定については、AF検出部120が第1のフォーカスレンズの上記合焦位置P1を合焦位置演算部102Aに供給するとともに上記偏差DfをフラッシュROM102から読み出しその偏差Dfをその合焦位置演算部121Aに供給して、合焦位置演算部121Aに図8に示すP2=P1-Dfという式を使って合焦位置P2を算出させた後、メインCPU100がその合焦位置演算部121Aの算出結果を受け取って第2のフォーカスレンズFLBをその算出された合焦位置に移動させ停止させる。
この構成にすると、第2のフォーカスレンズFLBをAFサーチさせる必要がなくなるので、従来と同じ時間でAFサーチが終了し、しかも第1の撮影部と第2の撮影部との間の固体差が解消されて的確な合焦位置に第1、第2のフォーカスレンズが各々配置される。
また、この第2の実施形態では、ズームスイッチ10Dが操作されて焦点距離が変更されると、第1、第2のフォーカスレンズFLA,FLBの合焦位置が変化するということを考慮して、フラッシュROM102内には異なる焦点距離ごとの偏差が記録され、AF検出部120が、メインCPU100から現在の焦点距離情報を受け取ってその焦点距離情報に応じた偏差を読み出す構成にしてある。この構成にすると、ズームスイッチ10Dが操作され焦点距離が変更されても正確な合焦位置決定が行なわれる。
こうしてメインCPU100が、合焦位置演算部121Aで算出された結果(P2=P1-Df)を受け取って図7(b)に示す様に、その合焦位置P2に第2のフォーカスレンズFLBをAFサーチをせずに配置する構成にしても良い。
この第2実施形態の構成にしても第1の実施形態と同じ様に、第1の撮影部と第2の撮影部との間の固体差が解消され、第1の撮影部1Aが備える第1のフォーカスレンズと第2の撮影部1Bが備える第2のフォーカスレンズ各々に的確な合焦位置が得られる。
また、この第2の実施形態においては、第2のフォーカスレンズを移動させずに、第1の合焦位置から偏差Dfだけ偏倚した位置に第2のフォーカスレンズFLBを移動させ停止させる構成にしてあるので、従来とほぼ同じ時間でAFサーチが終了する。
最後に、第2実施形態のメインCPU100が、AF検出部120と合焦位置演算部121Aを構成するDSPと連携して実行する合焦位置決定処理の手順を図9のフローチャートを参照しながら説明する。
図9は、第2実施形態のメインCPU100が、AF検出部120等を構成するDSPと連携して処理を実行する合焦位置決定の処理手順を示すフローチャートである。
ステップS507の処理がステップS507Aに変更され、ステップS508、ステップS509の処理が省略されている以外は、図5のフローの処理と同じであるので、処理が変更されたところを説明する。
ステップS507Aで、AF検出部120がフラッシュROM102から偏差Dfを読み出して合焦位置演算部102Aに供給し、第2のフォーカスレンズFLBの合焦位置P2を算出させ、ステップS510でメインCPU100が合焦位置演算部121Aに算出させた合焦位置P2を受け取ってFレンズ駆動部104Bに指示してフォーカスレンズFLBを合焦位置P2に移動させ停止させる。
本実施形態では、ステップS504からステップS506までの処理が本発明にいう第1のステップの処理の一例に相当し、ステップS507AからステップS510までの処理が本発明にいう第2のステップの処理の一例に相当する。
メインCPU100とAF検出部120等を構成するDSPが、図9のフローを実行すると、第1の撮影部1Aと第2の撮影部1Bとの間の固体差が解消された的確な合焦位置決定が従来とほぼ同じ時間で実施される。
図10~図13は、第3実施形態を説明する図である。
この第3実施形態においても図1の外観の撮影装置1が用いられるとする。
図10は、図2と同様に図1の撮影装置の内部構成を示す図であって、サーチ範囲設定部121が偏差検出部121Bに置き換えられている以外は、図2と同じ構成を示す図である。また、図11は、メインCPU100が、初回の撮影時には第1のFレンズ駆動部104Aと第2のFレンズ駆動部104Bに指示して第1および第2のフォーカスレンズFLA,FLBを移動させながらAF検出部120に第1、第2の合焦位置P1,P2の検出を行なわせこの合焦位置の偏差DfをDRAM115に記憶しておいて、次回以降の撮影においては第1のFレンズ駆動部104Aに指示して第1のフォーカスレンズFLAを移動させながらAF検出部120に第1の合焦位置P1の検出を行なわせ、偏差検出部に偏差Dfと第1の合焦位置P1を供給して第2のフォーカスレンズFLBの第2の合焦位置を算出させるという合焦位置決定方法を説明する図である。また図12は、偏差検出部121Bの処理内容を説明する図である。
この第3実施形態では、初回の撮影時には第1実施形態の合焦位置決定方法を使って第2のフォーカスレンズを合焦位置P1に移動させ停止させると共に、その初回の撮影時に第1の撮影部1Aと第2の撮影部1Bとの固体差を示す偏差Dfを取得してSDRAM115に記憶しておいて、以降の撮影時においては第2実施形態の合焦位置決定方法を使ってAF検出部120がSDRAM115から偏差Dfを読み出して偏差検出部121Bに供給しその偏差検出部121Bに第2の合焦位置P2を算出させ、メインCPU100がその第2の合焦位置P2を偏差検出部121Bから受け取って第2の駆動部104Bに指示してその偏差Dfだけ偏倚した位置に第2のフォーカスレンズFLBを移動させ停止させる構成を提案している。
この第3実施形態では、メインCPU100と第1、第2のFレンズ駆動部104A,104Bと第1、第2のフォーカスレンズFLA,FLBとフラッシュROM102とAF検出部120と偏差検出部121Bとで、本発明にいう合焦位置決定手段の一例が構成される。
ここで、図11を参照してメインCPU100が、第1のFレンズ駆動部104Aと第2のFレンズ駆動部104Bに指示して第1および第2のフォーカスレンズを移動させながらAF検出部120に行なわせる合焦位置決定方法を説明する。
図11(a)、(b)には、初回の撮影においては、上記第1実施形態と同じ様に、第1のフォーカスレンズFLAおよび第2のフォーカスレンズFLBを移動させながらAFサーチが行なわれるということが示されている。また図11(c)、(d)には、2回目以降の撮影においては、第1のフォーカスレンズFLAを移動させながらAFサーチが行われることと、第2のフォーカスレンズFLBについては初回の撮影により得られた偏差を使って第2のフォーカスレンズが合焦位置に配置されるということが示されている。
図11に示す様に、初回の撮影においては、第1実施形態と同様に、メインCPU100が第1のFレンズ駆動部104Aに指示して第1のサーチ領域(PnからPf)で第1のフォーカスレンズFLAを移動させながらAF検出部120に合焦位置を探索させる。ここでメインCPU100はAF検出部120が検出したAF評価値(コントラスト)が最大となる合焦位置P1を受け取って第1のFレンズ駆動部104Aに指示してフォーカスレンズFLAをその合焦位置P1に停止させる。
その後AF検出部120は、偏差検出部121に合焦位置P1を入力するとともに、フラッシュROM102から第2のサーチ領域に関する定数(近傍側偏差N、遠方側偏差F)を読み出して偏差検出部121Bに転送し、偏差検出部121Bに第2のサーチ領域を算出させる。メインCPU100は、その算出結果をバスBusを経由して受け取って第2のFレンズ駆動部104Bに指示して第2のフォーカスレンズFLBを第2のサーチ範囲(Pn´からPf´)で移動させながらAF検出部120に合焦位置を探索させる。
そしてメインCPU100はAF検出部120が検出した第2の撮影部1BのAF評価値(コントラスト)が最大となる合焦位置P2を受け取って第2のFレンズ駆動部104Aに指示してフォーカスレンズFLBをその合焦位置P2に停止させる。
このようにすると、第1実施形態と同様に、初回の撮影においては従来のAF時間とさほど変わらない時間で、2つの撮影部の間の固体差が解消された正確な合焦位置決定が行なわれる。
ここで、本実施形態では、偏差検出部121Bが第1の合焦位置P1と第2の合焦位置P2との間の偏差DfをP1-P2という式を使って算出し偏差DfをSDRAM115に記憶する。
そして次回以降の撮影においては、図11(c)、(d)に示す様にメインCPU100が第1のFレンズ駆動部104Aに指示して第1のフォーカスレンズFLAを第1のサーチ領域(PnからPf)で移動させながらAF検出部120に合焦位置P1を検出させた後、AF検出部115が、SDRAM115内の偏差Dfを読み出しその偏差Dfをその偏差検出部121Bに供給して、第2の撮影部1Bの第2のフォーカスレンズFLBの合焦位置P2を算出させ、メインCPU100がその合焦位置P2を受け取って第2のFレンズ駆動部104Bに指示して第2のフォーカスレンズFLBをその合焦位置P2に移動させ停止させる。
この構成にすると、2回目以降の撮影においては、第2実施形態と同様に、AFサーチを行なわせる必要がなくなって従来のAF時間と同じ時間で第1の撮影部と第2の撮影部との間の固体差が解消された正確な合焦位置決定が行なわれる。
最後に、合焦位置決定手段を構成するメインCPU100が、AF検出部120と偏差検出部121Bを構成するDSPと連携して実行する合焦位置決定処理の手順をフローチャートを参照しながら説明する。
図13は、メインCPU100がDSPと連携して実行する合焦位置決定の処理手順を示すフローチャートである。
ステップS501でメインCPU100がシャッタ釦10Cが半押しされたかどうかを判定する。このステップS501でメインCPU100がシャッタ釦10Cが半押しされていないと判定するとNo側へ進んでステップS501の処理を繰り返し、このステップS501でシャッタ釦10Cが半押しされたと判定すると、Yes側へ進む。Yes側へ進むとステップS502でメインCPU100からの処理開始指示を受けてDSP内のAE/AWB検出部130がAE動作を開始し、さらにステップS503Aへ進んで初回の撮影か否かを判定する。このステップS503AでメインCPU100が初回の撮影であると判定すると、Yes側へ進んでメインCPU100からの撮影開始指示を受けてAF検出部がAF動作を開始する。なお、ステップS503Aにおける、初回の撮影か否かは、より具体的には、SDRAM115内に有効な偏差Dfの値が記憶されているか否かによって判定する。
ステップS504で、メインCPU100が、まず第1のサーチ領域(図4のPnからPf)を第1のFレンズ駆動部104Aに設定し、次のステップS505で第1撮影光学系の第1のフォーカスレンズFLAを移動させながらAF検出部120に合焦位置の検出を行なわせる。
そしてステップS506で、AF検出部120が、第1の撮影部1Aが備える撮影光学系内の第1のフォーカスレンズFLAの合焦位置P1を取得したことを受けてメインCPU100は第1のFレンズ駆動部104Aに指示して第1のフォーカスレンズFLAをその第1の合焦位置P1に停止させる。
ステップS507でAF検出部120がその合焦位置P1を偏差検出部121Bに供給するとともに、フラッシュROM102から近傍側偏差Nと遠方側偏差Fを読み出して偏差検出部121に供給し、偏差検出部121Bに第2のサーチ領域を図12の式を使って算出させる。ステップS507でメインCPU100がその第2のサーチ領域を偏差検出部121Bから取得してステップS508で第2のFレンズ駆動部104Bにそのサーチ開始位置Pn´とサーチ終了位置Pf´とを設定して、ステップS509で第2のサーチ範囲でフォーカスレンズFLBを移動させながらAF検出部120に合焦位置P2を検出させる。ステップS510でメインCPU100がその合焦位置P2をAF検出部120から受け取って第2のFレンズ駆動部104Bに指示して第2のフォーカスレンズFLBをその合焦位置P2に移動させ停止させる。次のステップS5091でAF検出部120が偏差検出部121Bに合焦位置P1と合焦位置P2との偏差を算出させ、その偏差をSDRAM115に記憶する。
ステップS511でAF動作を終了した後、ステップS512でメインCPU100はシャッタ釦10Cの全押しを待ち受ける。このステップS512でメインCPU100が、シャッタ釦10Cが全押しされないと判定するとNo側へ進んでステップS512の処理を繰り返し、シャッタ釦10Cが全押しされたと判定すると、Yes側へ進んで撮影処理を実行する。
ここまでで初回の撮影処理が終了する。
次回の撮影以降においては、ステップS503でNo側へ進んで、ステップS514で、まず第1のサーチ領域(図11(c)のPnからPf)を第1のFレンズ駆動部104Aに設定する。次のステップS515で第1撮影光学系の第1のフォーカスレンズFLAを移動させながらAF検出部120に合焦位置の検出を行なわせる。そしてAF検出部120に検出させた合焦位置P1に基づいて第1のFレンズ駆動部104Aに指示して第1のフォーカスレンズFLAを合焦位置P1に移動させ停止させる。
ステップS516で、AF検出部120が、第1の撮影部1Aが備える撮影光学系内の第1のフォーカスレンズFLAの合焦位置P1を取得して、偏差検出部121Bに供給するとともに、SDRAM115内の偏差Dfを読み出して偏差検出部121Bに供給する。ステップS517で偏差検出部121Bに図12のP2=P1-Dfという式を使って第2の合焦位置P2を検出させる。メインCPU100は、その第2の合焦位置P2を偏差検出部121Bから受け取って第2のレンズ駆動部104Bに指示して第2のフォーカスレンズを第2の合焦位置P2に移動させ停止させる。
本実施形態では、図13の右側の初回の撮影に係るフローのステップS504からステップS509までの処理が本発明にいう第1のステップの処理の一例に相当し、図13の右側の初回の撮影に係るフローのステップS5091の処理が本発明にいう第2のステップの処理の一例に相当し、図13の左側の2回目以降の撮影に係るフローのステップS514からステップS517までの処理が本発明にいう第3のステップの処理の一例に相当する。
この構成にすると、初回の撮影においては、第1実施形態と同様に、従来とほぼ同じ程度の時間でAFサーチが終了し、かつ第1の撮影部と第2の撮影部との間の固体差が解消されて正確な合焦位置決定が行なわれ、さらに次回以降の撮影においては、第2実施形態と同様に、従来と同じ時間でAFサーチが終了し、かつ第1の撮影部と第2の撮影部との間の固体差が解消されて正確な合焦位置決定が行なわれる。
なお、上記第3の実施形態では、偏差DfをSDRAM115に記憶する構成にしたが、フラッシュROM102に記憶する構成にしても良い。フラッシュROM102に記憶する構成にすると、電源がオフされて電源がオンされた後の初回の撮影で偏差を記憶する必要がなくなる。実装された後でも書換えが自在な不揮発性のフラッシュROMを用いると、第2の実施形態のように製造時にフラッシュROMに記憶する必要がなくなって、撮影者が操作により1週間毎や1ヶ月毎等に偏差記憶部に自在に偏差を記憶する構成に拡張することができる。
また、上記実施形態では、立体撮影を行なう撮影装置についての説明を行なったが、本発明は、2つの撮影部でパノラマ撮影を行なう撮影装置であっても良く、2つの撮影部各々で異なる感度の撮影を行なう撮影装置であっても良く、2つの撮影部各々で色味の異なる撮影を行なう撮影装置であっても良く、2つの撮影部各々で輝度の異なる撮影を行なう撮影装置であっても良い。いずれの撮影装置でも本発明の合焦位置決定方法は適用可能である。
1 撮影装置
1A 第1の撮影部
1B 第2の撮影部
100 メインCPU
101 ROM
102 フラッシュROM
104A 第1のFレンズ駆動部
104B 第2のFレンズ駆動部
110A 第1の撮影光学系
110B 第2の撮影光学系
111A 第1の撮像素子
111B 第2の撮像素子
112A 第1のアナログ信号処理部
112B 第2のアナログ信号処理部
116A 第1のデジタル信号処理部
116B 第2のデジタル信号処理部
120 AF検出部
121 サーチ範囲設定部
121A 合焦位置演算部
121B 偏差検出部
130 AE・AWB検出部
1A 第1の撮影部
1B 第2の撮影部
100 メインCPU
101 ROM
102 フラッシュROM
104A 第1のFレンズ駆動部
104B 第2のFレンズ駆動部
110A 第1の撮影光学系
110B 第2の撮影光学系
111A 第1の撮像素子
111B 第2の撮像素子
112A 第1のアナログ信号処理部
112B 第2のアナログ信号処理部
116A 第1のデジタル信号処理部
116B 第2のデジタル信号処理部
120 AF検出部
121 サーチ範囲設定部
121A 合焦位置演算部
121B 偏差検出部
130 AE・AWB検出部
Claims (8)
- 第1のフォーカスレンズを含む第1の撮影光学系と、該第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が前記第1の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部と、
第2のフォーカスレンズを含む第2の撮影光学系と、該第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が前記第2の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部と、
前記第1のフォーカスレンズを所定の第1のサーチ領域内で移動させながら合焦位置を探索して該第1のフォーカスレンズを合焦位置に停止させ、前記第2の撮影光学系については、前記第2のフォーカスレンズを、前記第1のフォーカスレンズの合焦位置に対応した該第2のフォーカスレンズの合焦期待位置を含む、前記第1のサーチ領域よりも狭い第2のサーチ領域内で移動させながら合焦位置を探索して、該第2のフォーカスレンズを合焦位置に停止させる合焦位置決定手段とを備えたことを特徴とする撮影装置。 - 第1のフォーカスレンズを含む第1の撮影光学系と、該第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が前記第1の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部と、
第2のフォーカスレンズを含む第2の撮影光学系と、該第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が前記第2の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部と、
前記第2のフォーカスレンズの合焦位置の、前記第1のフォーカスレンズの合焦位置からの偏差を不揮発的に記憶しておく偏差記憶部と、
前記第1の撮影光学系について、前記第1のフォーカスレンズを移動させながら合焦位置を探索して該第1のフォーカスレンズを合焦位置に停止させ、前記第2の撮影光学系については、前記第2のフォーカスレンズを、前記第1のフォーカスレンズの合焦位置に対応した前記第2のフォーカスレンズの合焦期待位置よりも前記偏差記憶部に記憶された偏差だけ偏倚した位置に移動させる合焦位置決定手段とを備えたことを特徴とする撮影装置。 - 第1のフォーカスレンズを含む第1の撮影光学系と、該第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が前記第1の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部と、
第2のフォーカスレンズを含む第2の撮影光学系と、該第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が前記第2の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部と、
前記第1および第2のフォーカスレンズ駆動部各々に指示し前記第1および第2のフォーカスレンズ各々を光軸方向に移動させながら各々の合焦位置を探索し該第1及び該第2のフォーカスレンズ各々を各々の合焦位置に停止させる合焦位置決定手段と、
前記合焦位置決定手段により探索された前記第2のフォーカスレンズの合焦位置の、前記合焦位置決定手段により探索された前記第1のフォーカスレンズの合焦位置からの偏差を記憶する偏差記憶部とを備え、
前記合焦位置決定手段は、前記偏差記憶部に前記偏差が記憶されている場合には、第1の撮影光学系について、前記第1のフォーカスレンズを移動させながら合焦位置を探索して該第1のフォーカスレンズを合焦位置に停止させ、前記第2の撮影光学系については、前記第2のフォーカスレンズを、前記第1のフォーカスレンズの合焦位置に対応した前記第2のフォーカスレンズの合焦期待位置よりも前記偏差記憶部に記憶された偏差だけ偏倚した位置に移動させることを特徴とする撮影装置。 - 前記第1の撮影光学系および前記第2の撮影光学系双方が焦点距離可変であって互いに同一の焦点距離に調整されるものであり、
前記偏差記憶部は、前記偏差を、複数の焦点距離それぞれについて記憶するものであることを特徴とする請求項2又は3記載の撮影装置。 - 前記第1の撮影光学系および前記第2の撮影光学系が、並べて配置され立体視用の画像信号を生成するものであることを特徴とする請求項1から4記載のうちのいずれか1項記載の撮影装置。
- 第1のフォーカスレンズを含む第1の撮影光学系と、該第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が前記第1の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部、および、第2のフォーカスレンズを含む第2の撮影光学系と、該第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が前記第2の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部からなる双方の撮影部を備えた撮影装置における合焦位置決定方法であって、
前記第1のフォーカスレンズを所定の第1のサーチ領域内で移動させながら合焦位置を探索して該第1のフォーカスレンズを合焦位置に停止させる第1のステップと、
前記第2のフォーカスレンズを、前記第1のフォーカスレンズの合焦位置に対応した該第2のフォーカスレンズの合焦期待位置を含む、前記第1のサーチ領域よりも狭い第2のサーチ領域内で移動させながら合焦位置を探索して該第2のフォーカスレンズを合焦位置に停止させる第2のステップとを有することを特徴とする合焦位置決定方法。 - 第1のフォーカスレンズを含む第1の撮影光学系と、該第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が前記第1の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部、および、第2のフォーカスレンズを含む第2の撮影光学系と、該第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が前記第2の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部からなる双方の撮影部を備えるとともに、さらに、前記第2のフォーカスレンズの合焦位置の、前記第1のフォーカスレンズの合焦位置からの偏差を不揮発的に記憶しておく偏差記憶部を備えた撮影装置における合焦位置決定方法であって、
前記第1のフォーカスレンズを移動させながら合焦位置を探索して該第1のフォーカスレンズを合焦位置に停止させる第1のステップと、
前記第2のフォーカスレンズを、前記第1のフォーカスレンズの合焦位置に対応した前記第2のフォーカスレンズの合焦期待位置よりも前記偏差記憶部に記憶された偏差だけ偏倚した位置に移動させる第2のステップとを有することを特徴とする合焦位置決定方法。 - 第1のフォーカスレンズを含む第1の撮影光学系と、該第1のフォーカスレンズを光軸方向に移動させる第1のフォーカスレンズ駆動部と、被写体が前記第1の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第1の撮像素子とを有する第1の撮影部、および、第2のフォーカスレンズを含む第2の撮影光学系と、該第2のフォーカスレンズを光軸方向に移動させる第2のフォーカスレンズ駆動部と、被写体が前記第2の撮影光学系で結像されてなる被写体光を受光して該被写体を表わす画像信号を生成する第2の撮像素子とを有する第2の撮影部からなる双方の撮影部を備えるとともに、さらに、前記第2のフォーカスレンズの合焦位置の、前記第1のフォーカスレンズの合焦位置からの偏差を記憶する偏差記憶部を備えた撮影装置における合焦位置決定方法であって、
前記第1および第2のフォーカスレンズ駆動部各々に指示し前記第1および第2のフォーカスレンズ各々を光軸方向に移動させながら各々の合焦位置を探索し該第1及び該第2のフォーカスレンズ各々を各々の合焦位置に停止させる第1のステップと、
前記第1のステップの実行により探索された前記第2のフォーカスレンズの合焦位置の、前記第1のステップの実行により探索された前記第1のフォーカスレンズの合焦位置からの偏差を前記偏差記憶部に記憶させる第2のステップと、
前記偏差記憶部に前記偏差が記憶されている場合に前記第1ステップおよび前記第2ステップの実行に代えて実行される、前記第1の撮影光学系について、前記第1のフォーカスレンズを移動させながら合焦位置を探索して該第1のフォーカスレンズを合焦位置に停止させ、前記第2の撮影光学系については、前記第2のフォーカスレンズを、前記第1のフォーカスレンズの合焦位置に対応した前記第2のフォーカスレンズの合焦期待位置よりも前記偏差記憶部に記憶された偏差だけ偏倚した位置に移動させる第3のステップとを有することを特徴とする合焦位置決定方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2009801512381A CN102257422B (zh) | 2008-12-19 | 2009-12-17 | 拍摄装置和聚焦位置确定方法 |
| EP09833476.6A EP2369392B1 (en) | 2008-12-19 | 2009-12-17 | Image pickup apparatus and in-focus position deciding method |
| US13/132,807 US8743184B2 (en) | 2008-12-19 | 2009-12-17 | Photographing apparatus and focus position determining method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008323339A JP5185097B2 (ja) | 2008-12-19 | 2008-12-19 | 撮影装置および合焦位置決定方法 |
| JP2008-323339 | 2008-12-19 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2010071173A1 true WO2010071173A1 (ja) | 2010-06-24 |
Family
ID=42268843
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/071040 WO2010071173A1 (ja) | 2008-12-19 | 2009-12-17 | 撮影装置および合焦位置決定方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8743184B2 (ja) |
| EP (1) | EP2369392B1 (ja) |
| JP (1) | JP5185097B2 (ja) |
| CN (1) | CN102257422B (ja) |
| WO (1) | WO2010071173A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103563366A (zh) * | 2011-03-29 | 2014-02-05 | 索尼公司 | 图像拾取装置、图像拾取设备、图像处理方法、光圈控制方法及程序 |
| CN103748493A (zh) * | 2011-09-01 | 2014-04-23 | 松下电器产业株式会社 | 摄像装置以及程序 |
| JP2014515223A (ja) * | 2011-04-08 | 2014-06-26 | クゥアルコム・インコーポレイテッド | マルチカメラデバイスを較正するためのシステムおよび方法 |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8836767B2 (en) * | 2010-12-17 | 2014-09-16 | Samsung Electronics Co., Ltd | Imaging apparatus and imaging method |
| JP5670786B2 (ja) * | 2011-03-16 | 2015-02-18 | 富士フイルム株式会社 | テレビカメラの立体撮影用レンズシステム、テレビカメラの立体撮影用レンズ制御装置およびテレビカメラの立体撮影用レンズ制御方法 |
| JP5769534B2 (ja) * | 2011-07-28 | 2015-08-26 | キヤノン株式会社 | 撮像装置、撮像方法、およびプログラム |
| JP5948856B2 (ja) | 2011-12-21 | 2016-07-06 | ソニー株式会社 | 撮像装置とオートフォーカス方法並びにプログラム |
| KR101909130B1 (ko) * | 2012-02-13 | 2018-12-18 | 삼성전자주식회사 | 디지털 촬영 장치 및 그의 제어 방법 |
| JP2014021328A (ja) * | 2012-07-19 | 2014-02-03 | Canon Inc | 立体映像撮影システムに用いる光学装置 |
| JP6103849B2 (ja) * | 2012-08-02 | 2017-03-29 | オリンパス株式会社 | 内視鏡装置及び内視鏡装置の作動方法 |
| JP6039301B2 (ja) | 2012-08-09 | 2016-12-07 | キヤノン株式会社 | 撮像装置、撮像システム、撮像装置の制御方法、プログラム、および、記憶媒体 |
| CN103297694B (zh) * | 2013-05-20 | 2016-09-14 | 深圳市金立通信设备有限公司 | 一种全景拍摄的方法及设备 |
| TWI515470B (zh) * | 2014-04-30 | 2016-01-01 | 聚晶半導體股份有限公司 | 使用多鏡頭的自動對焦系統及其方法 |
| TWI515471B (zh) * | 2014-04-30 | 2016-01-01 | 聚晶半導體股份有限公司 | 使用多鏡頭的自動對焦系統及其方法 |
| US20150334309A1 (en) * | 2014-05-16 | 2015-11-19 | Htc Corporation | Handheld electronic apparatus, image capturing apparatus and image capturing method thereof |
| CN103986877B (zh) * | 2014-05-29 | 2017-09-26 | 宇龙计算机通信科技(深圳)有限公司 | 一种图像获取终端和图像获取方法 |
| US20160295097A1 (en) * | 2015-03-31 | 2016-10-06 | Qualcomm Incorporated | Dual camera autofocus |
| TWI663466B (zh) * | 2015-09-25 | 2019-06-21 | 佳能企業股份有限公司 | 攝像裝置及其操作方法 |
| US10429608B1 (en) | 2016-09-23 | 2019-10-01 | Apple Inc. | Primary-subordinate camera focus based on lens position sensing |
| CN106488137A (zh) * | 2016-11-29 | 2017-03-08 | 广东欧珀移动通信有限公司 | 双摄像头对焦方法、装置和终端设备 |
| KR102672599B1 (ko) | 2016-12-30 | 2024-06-07 | 삼성전자주식회사 | Af 방법 및 이를 수행하는 전자 장치 |
| KR102426728B1 (ko) * | 2017-04-10 | 2022-07-29 | 삼성전자주식회사 | 포커스 제어 방법 및 이를 지원하는 전자 장치 |
| CN107277348B (zh) * | 2017-06-16 | 2019-08-16 | Oppo广东移动通信有限公司 | 对焦方法、装置、计算机可读存储介质和移动终端 |
| JP7252247B2 (ja) * | 2019-01-03 | 2023-04-04 | コアフォトニクス リミテッド | 2つのズーム状態を有する少なくとも1つのカメラを備えるマルチアパーチャカメラ |
| JP7362299B2 (ja) * | 2019-05-30 | 2023-10-17 | キヤノン株式会社 | レンズ装置、カメラ、カメラシステム、制御方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09187039A (ja) * | 1995-12-28 | 1997-07-15 | Fuji Photo Optical Co Ltd | ズームレンズの駆動装置 |
| JPH10142478A (ja) * | 1996-11-11 | 1998-05-29 | Minolta Co Ltd | 観察光学装置 |
| JP2005045511A (ja) | 2003-07-28 | 2005-02-17 | Fuji Photo Film Co Ltd | 立体撮影装置及びその制御方法 |
| JP2006162990A (ja) | 2004-12-07 | 2006-06-22 | Fuji Photo Film Co Ltd | 立体画像撮影装置 |
| JP2007288799A (ja) * | 2007-06-08 | 2007-11-01 | Fujifilm Corp | 撮影装置 |
| JP2008197676A (ja) * | 2008-04-28 | 2008-08-28 | Canon Inc | 焦点調整装置、撮像装置、及び制御方法 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3989362A (en) * | 1972-11-01 | 1976-11-02 | Henry Merritt Farnum | Circumferential stereo spectacular, 360 degrees horizontally and vertically with mosaic in scene |
| ATE158129T1 (de) * | 1992-03-23 | 1997-09-15 | Canon Kk | Bildaufnahmevorrichtung mit mehreren linsen und korrektur von falschregistrierung |
| US5864360A (en) * | 1993-08-26 | 1999-01-26 | Canon Kabushiki Kaisha | Multi-eye image pick-up apparatus with immediate image pick-up |
| US5430474A (en) * | 1993-11-24 | 1995-07-04 | Hines; Stephen P. | Autostereoscopic imaging system |
| JPH08223607A (ja) | 1995-02-08 | 1996-08-30 | Fuji Photo Optical Co Ltd | 立体カメラ用レンズ制御装置 |
| JPH08242468A (ja) | 1995-03-01 | 1996-09-17 | Olympus Optical Co Ltd | 立体撮影装置 |
| US5678088A (en) * | 1995-08-31 | 1997-10-14 | Eastman Kodak Company | Method for advancing photographic film for interspersing mono and dual images |
| JPH1048735A (ja) * | 1996-05-29 | 1998-02-20 | Eastman Kodak Co | 写真フィルム又は磁気テープ上に画像を記録するカメラ |
| US5687412A (en) * | 1996-10-25 | 1997-11-11 | Eastman Kodak Company | Camera for selectively recording images recorded on a photographic film on a magnetic tape |
| US6014165A (en) * | 1997-02-07 | 2000-01-11 | Eastman Kodak Company | Apparatus and method of producing digital image with improved performance characteristic |
| US6271876B1 (en) * | 1997-05-06 | 2001-08-07 | Eastman Kodak Company | Using two different capture media to make stereo images of a scene |
| JPH11133484A (ja) * | 1997-10-29 | 1999-05-21 | Canon Inc | 複眼撮像装置 |
| US5852753A (en) * | 1997-11-10 | 1998-12-22 | Lo; Allen Kwok Wah | Dual-lens camera with shutters for taking dual or single images |
| US6157337A (en) * | 1999-01-29 | 2000-12-05 | Sony Corporation | 3D image acquiring and viewing systems and methods |
| US20020009299A1 (en) * | 1999-12-04 | 2002-01-24 | Lenny Lipton | System for the display of stereoscopic photographs |
| JP2002092656A (ja) * | 2000-09-11 | 2002-03-29 | Canon Inc | 立体画像表示装置及び画像データの表示方法 |
| JP2003037757A (ja) * | 2001-07-25 | 2003-02-07 | Fuji Photo Film Co Ltd | 画像撮像装置 |
| JP3914060B2 (ja) * | 2002-02-08 | 2007-05-16 | 富士フイルム株式会社 | 合焦装置 |
| JP4198449B2 (ja) | 2002-02-22 | 2008-12-17 | 富士フイルム株式会社 | デジタルカメラ |
| JP4573724B2 (ja) * | 2005-08-01 | 2010-11-04 | イーストマン コダック カンパニー | 複数光学系を有する撮像装置 |
| US7978239B2 (en) * | 2007-03-01 | 2011-07-12 | Eastman Kodak Company | Digital camera using multiple image sensors to provide improved temporal sampling |
| US7683962B2 (en) * | 2007-03-09 | 2010-03-23 | Eastman Kodak Company | Camera using multiple lenses and image sensors in a rangefinder configuration to provide a range map |
| JP4714176B2 (ja) * | 2007-03-29 | 2011-06-29 | 富士フイルム株式会社 | 立体撮影装置及び光軸調節方法 |
-
2008
- 2008-12-19 JP JP2008323339A patent/JP5185097B2/ja not_active Expired - Fee Related
-
2009
- 2009-12-17 US US13/132,807 patent/US8743184B2/en not_active Expired - Fee Related
- 2009-12-17 WO PCT/JP2009/071040 patent/WO2010071173A1/ja active Application Filing
- 2009-12-17 CN CN2009801512381A patent/CN102257422B/zh not_active Expired - Fee Related
- 2009-12-17 EP EP09833476.6A patent/EP2369392B1/en not_active Not-in-force
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09187039A (ja) * | 1995-12-28 | 1997-07-15 | Fuji Photo Optical Co Ltd | ズームレンズの駆動装置 |
| JPH10142478A (ja) * | 1996-11-11 | 1998-05-29 | Minolta Co Ltd | 観察光学装置 |
| JP2005045511A (ja) | 2003-07-28 | 2005-02-17 | Fuji Photo Film Co Ltd | 立体撮影装置及びその制御方法 |
| JP2006162990A (ja) | 2004-12-07 | 2006-06-22 | Fuji Photo Film Co Ltd | 立体画像撮影装置 |
| JP2007288799A (ja) * | 2007-06-08 | 2007-11-01 | Fujifilm Corp | 撮影装置 |
| JP2008197676A (ja) * | 2008-04-28 | 2008-08-28 | Canon Inc | 焦点調整装置、撮像装置、及び制御方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2369392A4 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103563366A (zh) * | 2011-03-29 | 2014-02-05 | 索尼公司 | 图像拾取装置、图像拾取设备、图像处理方法、光圈控制方法及程序 |
| EP2693756A4 (en) * | 2011-03-29 | 2015-05-06 | Sony Corp | IMAGE RECORDING APPARATUS, IMAGE RECEIVING DEVICE, IMAGE PROCESSING METHOD, OPENING CONTROL METHOD, AND PROGRAM |
| CN103563366B (zh) * | 2011-03-29 | 2016-10-19 | 索尼公司 | 图像拾取装置、图像拾取设备、图像处理方法、光圈控制方法及程序 |
| US9544571B2 (en) | 2011-03-29 | 2017-01-10 | Sony Corporation | Image pickup unit, image pickup device, picture processing method, diaphragm control method, and program |
| US9826215B2 (en) | 2011-03-29 | 2017-11-21 | Sony Corporation | Stereoscopic image pickup unit, image pickup device, picture processing method, control method, and program utilizing diaphragm to form pair of apertures |
| US10397547B2 (en) | 2011-03-29 | 2019-08-27 | Sony Corporation | Stereoscopic image pickup unit, image pickup device, picture processing method, control method, and program utilizing diaphragm to form pair of apertures |
| JP2014515223A (ja) * | 2011-04-08 | 2014-06-26 | クゥアルコム・インコーポレイテッド | マルチカメラデバイスを較正するためのシステムおよび方法 |
| US9313390B2 (en) | 2011-04-08 | 2016-04-12 | Qualcomm Incorporated | Systems and methods to calibrate a multi camera device |
| JP2017017721A (ja) * | 2011-04-08 | 2017-01-19 | クゥアルコム・インコーポレイテッドQualcomm Incorporated | マルチカメラデバイスを較正するためのシステムおよび方法 |
| CN103748493A (zh) * | 2011-09-01 | 2014-04-23 | 松下电器产业株式会社 | 摄像装置以及程序 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2369392A1 (en) | 2011-09-28 |
| CN102257422B (zh) | 2013-09-18 |
| US8743184B2 (en) | 2014-06-03 |
| CN102257422A (zh) | 2011-11-23 |
| EP2369392A4 (en) | 2013-10-16 |
| JP5185097B2 (ja) | 2013-04-17 |
| JP2010145771A (ja) | 2010-07-01 |
| US20110234768A1 (en) | 2011-09-29 |
| EP2369392B1 (en) | 2015-07-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5185097B2 (ja) | 撮影装置および合焦位置決定方法 | |
| JP5232330B2 (ja) | 立体撮像装置及び立体撮像装置の自動焦点調節方法 | |
| US8243188B2 (en) | Imaging apparatus | |
| JP5503347B2 (ja) | 交換レンズ、カメラボディ及びカメラシステム | |
| JP4639205B2 (ja) | 撮像装置及び制御方法、及びユーザーインタフェースの表示装置 | |
| JP5713055B2 (ja) | 撮像装置、撮像方法及びプログラム | |
| JP2003241072A (ja) | カメラ | |
| JP5571179B2 (ja) | 立体撮像装置及び立体撮像装置の自動焦点調節方法 | |
| JP6337431B2 (ja) | システム、サーバ、電子機器およびプログラム | |
| WO2013069279A1 (ja) | 撮像装置 | |
| JP2008158028A (ja) | 電子スチルカメラ | |
| JP2011059707A (ja) | 撮像装置及び制御方法、及びユーザーインタフェースの表示装置 | |
| KR101805006B1 (ko) | 촬상 장치 및 촬상 방법 | |
| JP2013101380A (ja) | 撮影装置および合焦位置決定方法 | |
| JP2005140851A (ja) | オートフォーカスカメラ | |
| JP2007110498A (ja) | 複眼式撮影装置 | |
| JP2015040906A (ja) | 撮像装置およびプログラム | |
| JP6572993B2 (ja) | サーバおよびプログラム | |
| JP2012132957A (ja) | 撮像装置及び撮像装置の設定方法 | |
| JP2007104586A (ja) | 複眼式撮影装置の非連動オート系処理装置 | |
| JP2017032754A (ja) | 撮像装置、その制御方法、及びプログラム | |
| JP5241907B2 (ja) | 撮像装置及び制御方法、及びユーザーインタフェースの表示装置 | |
| JP2006099017A (ja) | 撮影装置 | |
| JP2019193309A (ja) | サーバおよびプログラム | |
| JP2007110500A (ja) | 複眼式撮影装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 200980151238.1 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09833476 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13132807 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2009833476 Country of ref document: EP |