WO2010026836A1 - 分散制御用制御ソフトウェアおよび電子制御装置 - Google Patents
分散制御用制御ソフトウェアおよび電子制御装置 Download PDFInfo
- Publication number
- WO2010026836A1 WO2010026836A1 PCT/JP2009/062730 JP2009062730W WO2010026836A1 WO 2010026836 A1 WO2010026836 A1 WO 2010026836A1 JP 2009062730 W JP2009062730 W JP 2009062730W WO 2010026836 A1 WO2010026836 A1 WO 2010026836A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- control
- software
- unit
- communication
- shared
- Prior art date
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/52—Program synchronisation; Mutual exclusion, e.g. by means of semaphores
- G06F9/526—Mutual exclusion algorithms
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/54—Interprogram communication
- G06F9/544—Buffers; Shared memory; Pipes
Definitions
- the present invention relates to an electronic control device and control software installed in the electronic control device, and more particularly to distributed control of a plurality of vehicle electronic control devices.
- a microcontroller As a control device such as an automobile engine control, a microcontroller (hereinafter referred to as a microcomputer) incorporating a central processing unit, ROM, RAM, input / output signal processing device and the like is used.
- the software installed in the microcomputer is generally composed of an application program that performs control processing, a device driver that performs input / output, an operating system (OS), and the like so that a control target performs a target control operation.
- OS operating system
- distributed OS distributed operating system
- the distributed OS is an OS that manages the entire system including a plurality of arithmetic devices, and this OS appropriately distributes a process, which is an execution unit of a program, to each arithmetic device (for example, JP-A-10-243004). reference).
- the upper layers of the network independent of the physical layer such as communication protocols and signal processing, and the physical layer are used.
- the layers By separating the layers into dependent lower layers and concealing the differences in the physical layer, these can be designed flexibly with respect to the actual system configuration (see, for example, Japanese Patent No. 3460593).
- a microcomputer equipped with a plurality of arithmetic devices in which a plurality of arithmetic devices are mounted in one microcomputer package has been put into practical use.
- software operates in parallel on each computing device, and data that needs to be exchanged between the computing devices is exchanged on a shared storage area such as a dual port RAM.
- each arithmetic unit operates independently, in the incomplete state in which data writing from one arithmetic unit is not completed, the other performs reading, multiple writing, or one reading If the other writing is partially performed in the middle, the data may be damaged, and the system operation deviates from the data exchange intended at the time of design and causes a malfunction. Need to avoid conflicts.
- An object of the present invention is to eliminate such problems caused by competition among a plurality of computing devices, and to allocate each software component on a real-time OS that operates for each computing device to guarantee real-time performance. Concealing the difference in configuration of performing data exchange between multiple arithmetic devices via a shared storage area in the same way as the layer, and by transferring data via the shared storage area in the same way as absorbing the difference in communication method It is to absorb the difference and improve the development efficiency of the control system using a plurality of arithmetic devices.
- processing software that reads and writes data in the shared storage area that has the same interface as software parts that perform network communication and has means for avoiding contention is converted into parts, and data is exchanged through the shared storage area. Is handled as one of the communication physical layers, and a control system is constructed.
- FIG. 1 shows a configuration of an automobile engine control system which is one of control systems targeted by the present invention.
- the control unit 215 includes a first central processing unit (CPU) 205, a second CPU 210, an interrupt control circuit 212, a first read-only memory (ROM) 203, a first volatile read / write memory (RAM) 204, 2 ROM 208, second RAM 209, common ROM 207 and common RAM 206 shared by CPU 1 and CPU 2, input circuit 202, and output circuit 211.
- CPU central processing unit
- 210 a second CPU 210
- an interrupt control circuit 212 includes a first read-only memory (ROM) 203, a first volatile read / write memory (RAM) 204, 2 ROM 208, second RAM 209, common ROM 207 and common RAM 206 shared by CPU 1 and CPU 2, input circuit 202, and output circuit 211.
- ROM read-only memory
- RAM volatile read / write memory
- each of the elements 202 to 212 may be realized by using a single element or a separate element. However, since the difference does not particularly affect the present invention, the configuration thereof is not limited.
- a sensor 216 to be controlled is connected to the control unit via a signal input circuit 213 and an actuator 217 via a drive circuit 214, and the microcomputer 201 performs these controls. Control is performed by reading / writing from / to the registers of the input circuit 202 and the output circuit 211 from components such as a microcomputer.
- Software describing the control method is installed in the ROMs 203, 208, and 207 and the RAMs 204, 209, and 206 on the control unit.
- the hardware as shown in Fig. 3 is mounted on the above control device, and various data are transferred.
- This configuration shows the basic configuration of the engine control system.
- the electronic control unit 418 is intended to output a spark plug drive pulse 416 and a fuel injection device drive pulse 417 based on the engine state input from the throttle sensor 407, the water temperature sensor 408, the air flow sensor 409, and the crank angle sensor 410. To do.
- a first CPU 401 and a second CPU 402 are connected via a shared RAM 403, and an analog / digital converter (AD converter 404) and a pulse input for capturing an input signal
- the information of each sensor is taken in via the circuit 405, and the ignition plug drive pulse 416 and the fuel injection device drive pulse 417, which are actuator drive signals, are output via the timer / pulse output circuit 406.
- a sensor value correction process 419 for calculating an external physical quantity based on sensor input and a first operating system (OS) 420 are allocated to the first arithmetic unit 401, and the external physical quantity and crank angle sensor are used.
- OS operating system
- a process for performing ignition control 414 and fuel injection control 415 and a second operating system (OS) 421 are allocated to the second CPU 402.
- OS operating system
- the processing load can be distributed.
- information is transferred between arithmetic units by holding the throttle opening 411, the water temperature 412, and the intake air amount 413, which are information on the control target obtained from each sensor on the shared RAM 403. Is possible.
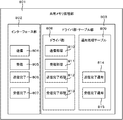
- Fig. 2 is a diagram showing the hierarchical structure of software executed by the control unit.
- the first software 303 is basic software executed by the first CPU 307
- the second software 309 is basic software executed by the second CPU 314.
- the software 303 executed by the first CPU 307 includes a plurality of control application software components 301 describing logic for controlling the control target of the system, a component connecting unit 302 that connects and integrates them, and each task that is a software execution unit.
- the operating system 304 and the communication processing unit 312 are executed after the priority control is performed.
- the communication processing unit 312 includes a communication upper unit 305 that performs processing of communication data and detects errors and various abnormal states without depending on a physical layer medium that is a physical communication means, and specific data. And a communication driver unit 306 that controls hardware that transmits and receives data.
- the component is designed based on the physical and logical properties of the control software.
- the information regarding the configuration of the physical layer of communication in the electronic system is abstracted, the design is performed in consideration of only the abstracted logical connection 311 between the components, and the physical connection 310 is considered in the physical layer when the electronic system is constructed.
- FIG. 6 shows a configuration of a shared memory processing unit 801 corresponding to the communication driver unit 306 for performing communication via the shared memory.
- the shared memory processing unit includes an interface unit 802 that defines a method of accessing from the outside, and a driver unit / table unit 803 that performs actual read / write processing of the shared memory.
- the interface unit 802 has four interfaces: transmission 804, reception 805, transmission completion 806, and reception completion 807.
- the driver unit / table unit 803 includes a driver unit 808 and a notification processing table 809, and processes corresponding to each interface defined by the interface unit 802 are arranged in the driver unit. These typically correspond to C language functions.
- the notification processing table 809 is a table for registering a call destination from an event such as an interrupt to each notification processing. Typically, a pointer of a C function is registered, and when the event occurs, the function of the pointer is registered. Execute. Alternatively, it is possible to register a jump destination function as a C language macro.
- FIG. 5 shows the details of the software processing procedure using the configuration described above.
- the control application software 704, the communication upper unit 705, and the communication driver unit 706 operate on the first CPU 701.
- the hardware 702 shared among the CPUs includes a semaphore 707, a RAM 708, and an interrupt controller 709.
- the CPU 703 operates a communication driver unit 710, a communication upper unit 711, and control application software 712.
- FIG. 5 the details of transferring data from the control application software 704 installed in the first CPU 701 to the control application software 712 installed in the second CPU 703 via the RAM 708 storing the shared data in the above configuration. The procedure is shown.
- the communication high-order unit 705 performs transmission data pre-processing 714 such as adjustment and allocation of transmission data length and adjustment of bit arrangement. Then, a data transmission request 715 is issued to the communication driver unit.
- the communication driver performs exclusive processing of 716 to 720 using the semaphore 707 in order to guarantee exclusive access to the data on the RAM 708 shared by the first CPU 701 and the second CPU 703.
- a test and set process 717 (described later) of the semaphore 707 is performed to obtain access authority to a predetermined area of the shared RAM 708, and then the write 718 is written to the shared RAM 708.
- clear 720 of the semaphore 707 as the process of releasing the protection area 719 to complete the exclusive process.
- a transmission completion interrupt 721 is generated to the interrupt controller 709. This is captured by the first CPU 701 as a transmission completion interrupt 722.
- the transmission completion notification 723 of the communication upper level unit 705 is called based on the transmission completion notification 814 registered in the communication driver unit 706, that is, the notification processing table 809 of the shared memory processing unit. 724 is performed.
- the second CPU 703 takes in the transmission completion interrupt 721 generated by the interrupt controller 709 as a reception completion interrupt 725.
- the reception completion notification 726 of the upper communication unit 711 is activated based on the reception completion notification 815 registered in the communication driver unit 710, that is, the notification processing table 809 of the shared memory processing unit, and the communication is performed there.
- the reception processing 727 of the driver unit 710 is called.
- exclusive processing of 728 to 732 is performed using the semaphore 707.
- a test and set process 729 (described later) is performed, and after obtaining the access authority to the exclusive area, the data is read out 730 from the RAM 708. Hold on. Then, a semaphore 707 release process 732 is performed from the protection area release process 731.
- the control application software 712 issues a data acquisition request 733 to the upper communication unit 711 to acquire data.
- Test and set processing 717 and test and set processing 729 in FIG. 5 are exclusive processing called test and set using such hardware.
- This series of processing needs to be performed atomically. Performing a certain process atomically means that the arithmetic device does not receive any interruption due to an interrupt of the arithmetic device or data access from another arithmetic device during the execution of the process.
- This procedure receives a reference to a variable or register that is data to be written, temporarily saves the value, rewrites the parameter variable or register to “true”, and returns the value of the register that was once held It is processing.
- FIG. 9 is pseudo code written in C language, the above atomic process cannot be achieved only by software processing, and it is necessary to implement this processing as microcode on hardware or dedicated hardware. There is.
- the electronic control system 1024 is intended to output a spark plug drive pulse 1016 and a fuel injection device drive pulse 1017 based on the engine state input from the throttle sensor 1007, the water temperature sensor 1008, the airflow sensor 1009, and the crank angle sensor 1010. To do.
- the electronic control system 1024 includes two electronic control devices 1001 and 1002 which are connected via a CAN bus 1003, and the 1001 and 1002 can be disposed at physically separated locations.
- the first CPU 1018 captures information of various sensors (1007 to 1009) via an analog / digital converter (AD converter 1004) for capturing an input signal, and the second arithmetic unit 1019 includes a pulse input circuit.
- Information of the crank angle sensor 1010 is taken in via 1005, and an ignition plug drive pulse 1016 and a fuel injection device drive pulse 1017, which are actuator drive signals, are outputted via a timer / pulse output circuit 1006.
- a sensor value correction process 1027 for calculating an external physical quantity based on the sensor input and a first OS 1020 are assigned to the first CPU 1018, and the engine rotational position obtained from the external physical quantity and the crank angle sensor is assigned.
- the process for performing the ignition control 1014 and the fuel injection control 1015 and the second OS 1021 are assigned to the second CPU 1019.
- information on the control target obtained from the sensors of the throttle opening 1011, the water temperature 1012, and the intake air amount 1013 on the CAN bus 1003 is transmitted from the first arithmetic device 1018 and transmitted to the second arithmetic device. Received at 1019.
- FIG. 7 shows an example in which a CAN communication processing unit 901 is configured as a mounting method corresponding to CAN of the communication driver unit 306 in order to perform communication using CAN communication.
- the CAN communication processing unit includes an interface unit 902 that defines a method for accessing from the outside, and a driver unit / table unit 903 that performs actual read / write processing of the shared memory.
- the interface unit 902 has four interfaces: transmission 904, reception 905, transmission completion 906, and reception completion 907.
- the driver unit 908 has processes 910 to 913, and the notification process table 909 has notification processes 914 and 915.
- FIG. 4 shows the details of the software processing procedure using the configuration described above.
- the control application software 606, the communication upper unit 607, and the communication driver unit 608 operate on the first CPU 601, and the interrupt controller 609 and the network controller 610 exist in the peripheral hardware 602 on the first electronic control unit 638.
- the communication driver unit 614, the communication upper unit 615, and the control application software 616 operate in the second CPU 605 mounted on the second electronic control unit 639.
- a network controller 612 and an interrupt controller 613 operate on the peripheral hardware 604.
- a detailed procedure for transferring data from the control application software 606 installed in the first CPU 601 to the control application software 616 installed in the second CPU 605 via the CAN bus 603 with the above configuration will be described.
- a data transmission request 617 is issued from the control application software 606 to the communication high-order unit 607
- the communication high-order unit 607 performs pre-processing of transmission data 618 such as adjustment and allocation of transmission data length and adjustment of bit arrangement.
- a data transmission request 619 is issued to the communication driver unit 608.
- the communication driver unit performs a transmission operation 620 for using the network controller 610 for transmission
- the network controller 610 performs transmission start 621.
- the transmitted data is connected to the second electronic control unit 639 via the CAN bus 603.
- the network controller 612 installed in the second electronic control unit 639 detects a signal on the network and starts reception 622. When reception is completed normally, a reception notification is transmitted 623 if reception is successful.
- the network controller 1610 on the first electronic control unit 638 receives the normal reception notification 624 and notifies the interrupt controller 609 that the transmission has been completed normally 625.
- the interrupt controller 609 notifies the first CPU 601 of this as an interrupt, and the first CPU 601 transmits the transmission completion processing 912 as a transmission completion interrupt 626 via the registered communication driver unit, that is, the transmission completion interface 906 in the CAN communication processing unit. From here, the transmission completion processing 628 is performed in the transmission completion notification processing 627 of the upper communication unit 607 registered as the transmission completion notification.
- the second electronic control unit 639 notifies the completion of reception from the network controller 612 that has completed reception to the interrupt controller 613, and notifies the second CPU 605 from the interrupt controller 613.
- the reception completion interrupt process 630 is activated, and the reception completion notification 631 of the registered higher communication unit is executed.
- the communication host unit 615 issues a data reception 632 request to the communication driver unit 614, performs a reception operation 633 of the network controller 612 from the communication driver unit 614, acquires data, and holds the data in the communication host unit 615.
- the control application software executed on the second CPU 605 issues a data acquisition 634 request and performs ignition control 636 and fuel injection control 637 based on this request.
- the CAN communication driver interface unit 902 shown in FIG. 5 has the same interface, and also in the processing procedure, 715, 723, 726, and 727, which are the calling portions of the driver unit in the shared memory execution procedure shown in FIG. 4, 619, 627, 631, and 632, which are calling portions of the driver unit in the CAN communication execution procedure shown in FIG. 4, can be ported without changing the control application software by replacing only the communication driver unit. It becomes possible. For this reason, the man-hour for a transplant can be reduced.
- the second electronic control unit 1209 takes in the input value obtained from the throttle sensor 1212 by using the AD converter 1210, and performs the throttle opening by the sensor value correction process 1213 which is software operating on the third arithmetic unit 1211. Is calculated.
- the calculated value is transmitted on the CAN bus 1208 via the network controller 1215.
- the first electronic control unit 1201 acquires this data from the network controller 1216, and performs ignition control and fuel injection control. Further, the shared memory processing unit shown in FIG.
- the third arithmetic unit 1211 is equipped with a CAN communication processing unit shown in FIG. Similar to the first embodiment, the shared memory processing unit in FIG. 6 and the CAN communication processing unit in FIG. 7 both have the same interface units 802 and 902.
Landscapes
- Engineering & Computer Science (AREA)
- Software Systems (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
- Memory System (AREA)
- Stored Programmes (AREA)
- Multi Processors (AREA)
Abstract
共有記憶領域を介したデータ授受による差異を吸収することで、複数演算装置を用いた制御システムの開発効率を向上することができる制御ソフトウェアを提供する。 ネットワーク通信を行うソフトウェア部品と同じインターフェースを有し、前記複数演算装置が共有する記憶領域のデータの読み書きを行う処理ソフトウェアを部品化することで、共有記憶領域によるデータの授受を通信物理層のひとつとして扱い、制御システムを構築する。
Description
本発明は電子制御装置および前記電子制御装置に搭載する制御用ソフトウェアに関し、特に複数の車両用電子制御装置の分散制御に関する。
自動車エンジン制御などの制御装置として、中央演算装置、ROM、RAM、入出力信号処理装置などを内蔵したマイクロコントローラ(以下マイコンと表記)が用いられている。マイコンに搭載されるソフトウェアは制御対象が目的とする制御動作を行うように、一般的には制御処理を行うアプリケーションプログラムと入出力を行うデバイスドライバやオペレーティングシステム(OS)などによって構成されている。
近年、ソフトウェアの規模の増大に伴い、個別の制御システムについてアプリケーションプログラムと入出力を行うデバイス制御プログラムとを全て開発することが困難になっており、ソフトウェアを小さな単位の部品として構成し、これを再利用する手法や、これらを階層化し変更箇所を局所化する、などの手法が採用されている。さらに、これらのソフトウェアの部品を資産として蓄積し、開発対象の電子システムの機器の構成やネットワークの構成に応じてソフトウェアの部品を組み合わせて開発する手法が採用されている。
また、分散システムを前提としその構築をハードウェアに依存することなくシステムを構築する手法として分散オペレーティングシステム(分散OS)がある。分散OSは、複数の演算装置からなるシステム全体を管理するOSであり、このOSがプログラムの実行単位であるプロセスを各演算装置に適宜分配するものである(例えば、特開平10-243004号公報参照)。
分散システムの開発効率を向上するための一般的な手法においては、ネットワークの物理的な差異を吸収するため、通信プロトコルおよび信号処理などの物理層に非依存なネットワークの上位層と、物理層に依存する下位層に分離し、物理層の差異を隠蔽することで、これらを実際のシステム構成に対して柔軟な設計を可能にする(例えば、特許第3460593号公報参照)。
ところで、近年マイコンの処理速度向上の方策として複数の演算装置をひとつのマイコンパッケージに搭載する複数の演算装置を搭載するマイコンが実用化している。複数演算装置搭載のシステム上では、ソフトウェアはそれぞれの演算装置上で並行に動作し、演算装置間で授受を行う必要のあるデータはデュアルポートRAMなどの共有記憶領域上でやりとりを行う。
このとき、演算装置はそれぞれ独立に動作するため、一方の演算装置からのデータの書き込みが完了していない不完全な状態で他方が読み込みを行ったり、多重に書き込みを行ったり、一方の読み込みの途中で他方の書き込みが部分的に行われたりすると、データが破損する可能性があり、システムの動作は設計時に意図したデータのやりとりから逸脱し、不具合を引き起こすこととなるため、このようなデータの競合を避ける必要がある。
また、車両制御のような高いリアルタイム性の要求される分野では、従来のソフトウェア資産は必ずしも分散システムを想定して開発されているものでは無く、単一の演算装置に割り当てた上で、固定的にスケジューリングを行う前提で設計されていることが多いため、単純に分散OSに配置しただけでは当初の意図から逸脱した動作となるため、分散OSの活用できる場面は非常に限定される。このため、既存ソフトウェア資産の再利用のためには、個別の演算装置が固有のリアルタイムOSを搭載し、各ソフトウェアの部品はそのOS上に固定的にスケジューリングする必要がある。さらに、車両制御システムはリアルタイムシステムであり、処理の遅延がシステムの性能、信頼性に大きな影響を及ぼすため、情報系で用いられている柔軟であるがリアルタイム性の保証できない機構を採用することができない。
本発明の目的は、このような複数演算装置間の競合による不具合を排除するとともに、各ソフトウェア部品は演算装置毎に動作するリアルタイムOS上に割り付けてリアルタイム性を保証することができ、ネットワークの物理層と同様に複数の演算装置間の共有記憶領域を介したデータ授受を行うという構成の差異を隠蔽し、通信方式の差異を吸収するのと同じように、共有記憶領域を介したデータ授受による差異を吸収し、複数演算装置を用いた制御システムの開発効率を向上することである。
上記目的を実現するために、ネットワーク通信を行うソフトウェア部品と同じインターフェースを有し、競合を回避する手段を有する共有記憶領域のデータの読み書きを行う処理ソフトウェアを部品化し、共有記憶領域によるデータの授受を通信物理層のひとつとして扱い、制御システムを構築する。
上記構成にて制御システムを作成すると、従来からのソフトウェア資産を再利用しながら、共有記憶領域によって引き起される虞れのある競合の不具合を排除することができるため、複数の演算装置を使った制御システムを開発する工数を信頼性を損うことなく削減できる。
本発明の他の目的、特徴及び利点は添付図面に関する以下の本発明の実施例の記載から明らかになるであろう。
本発明の他の目的、特徴及び利点は添付図面に関する以下の本発明の実施例の記載から明らかになるであろう。
以下本発明の実施形態の第一の例について説明する。
図1は本発明の対象とする制御システムのひとつである自動車エンジン制御システムの構成を示すものである。コントロールユニット215は第1の中央演算装置(CPU)205、第2のCPU210、割込み制御回路212、第1の読出し専用メモリ(ROM)203、第1の揮発性読書きメモリ(RAM)204、第2のROM208、第2のRAM209、CPU1とCPU2が共有する共通ROM207および共通RAM206、入力回路202、出力回路211、から構成される。
なお202~212の各要素は一つの素子上に内蔵される場合と、別素子を用いて実現される場合があるが、その相違は本発明に特に影響しないのでその構成は問わない。コントロールユニットには制御対象であるセンサ216が信号入力回路213を、アクチュエータ217が駆動回路214を介して接続され、マイコン201がこれらの制御を行う。制御はマイコンをはじめとする構成要素から入力回路202、出力回路211のレジスタへの読み書きにより行われる。制御の方法を記述したソフトウェアはコントロールユニット上のROM203、208、207およびRAM204、209、206に搭載される。
上記の制御装置上に図3に示すようなハードウェアを実装し、各種データの受け渡しを行う。本構成はエンジン制御システムの基本構成を示したものである。電子制御ユニット418は、スロットルセンサ407、水温センサ408、エアフローセンサ409、クランク角センサ410から入力したエンジンの状態に基づき、点火プラグ駆動パルス416、燃料噴射装置駆動パルス417を出力することを目的とする。電子制御ユニット418の内部には、第1のCPU401と第2のCPU402が共有のRAM403を介して接続しており、入力信号を取り込むためのアナログ・デジタル変換器(AD変換器404)とパルス入力回路405を介して各センサの情報を取り込み、タイマ・パルス出力回路406を介してアクチュエータ駆動信号である点火プラグ駆動パルス416、燃料噴射装置駆動パルス417を出力する。本実施例ではセンサの入力をもとに外界の物理量を算出するセンサ値補正処理419と第1のオペレーティングシステム(OS)420を第1の演算装置401に割り当て、外界の物理量とクランク角センサから得られたエンジン回転位置をもとに点火制御414、燃料噴射制御415を行う処理と第2のオペレーティングシステム(OS)421を第2のCPU402に割り当てている。これにより、処理負荷を分散させることが可能となる。また、CPU間では、共有RAM403上に各センサから得られた制御対象の情報である、スロットル開度411、水温412、吸入空気量413を保持することで、演算装置間で情報を受け渡すことが可能となる。
図2はコントロールユニットが実行するソフトウェアの階層構造を示した図である。第1のソフトウェア303は第1のCPU307で実行される基本ソフトウェアであり、第2のソフトウェア309は第2のCPU314で実行される基本ソフトウェアである。第1のCPU307で実行されるソフトウェア303は、システムの制御対象を制御するロジックを記述した複数の制御アプリケーションソフトウェア部品301とこれらを接続し統合する部品接続部302、ソフトウェアの実行単位であるタスク毎の優先度制御を行った上で実行させるオペレーティングシステム304、通信処理部312から構成される。通信処理部312は、通信の物理的な伝達手段である物理層の媒体に依存せず通信データの加工処理やエラーや種々の異常状態の検出などを行う通信上位部305と、具体的なデータの送受信を行うハードウェアの制御を行う通信ドライバ部306とから構成される。
制御システムの設計時には、制御アプリケーション部313と部品接続部302のみに着目し、制御ソフトの物理的、論理的な性質に基づき部品の設計を行う。このとき、電子システムにおける通信の物理層の構成に関する情報を抽象化し、部品間の抽象化した論理接続311のみを考慮して設計を行い、電子システムの構築時に物理層まで考慮した物理接続310として実装することで、制御アプリケーションソフトウェア部品301の設計と電子システムの構成を分離でき、ソフトウェアの再利用性を向上できる。
図6は共有メモリを介して通信を行うための、通信ドライバ部306にあたる共有メモリ処理部801の構成を示したものである。共有メモリ処理部は外部からアクセスする方法を定めたインターフェース部802と実際の共有メモリの読み出し、書き込み処理を行うドライバ部・テーブル部803とから構成される。インターフェース部802は送信804、受信805、送信完了806、受信完了807の4つのインターフェースを持つ。ドライバ部・テーブル部803はドライバ部808、通知処理テーブル809からなり、ドライバ部にはインターフェース部802で規定された各インターフェースに対応した処理を配置する。これらは典型的には、C言語の関数に対応するものである。通知処理テーブル809には割込みなどのイベントから各通知処理への呼出し先を登録するテーブルであり、典型的にはC言語の関数のポインタを登録し、当該イベントが発生した場合に前記ポインタの関数を実行する。あるいはC言語のマクロとして飛び先の関数を登録することも可能である。
図5は上記に記載の構成を用いてソフトウェアの処理手順の詳細を示したものである。第1のCPU701上では制御アプリケーションソフトウェア704、通信上位部705、通信ドライバ部706が動作し、CPU間で共有されるハードウェア702には、セマフォ707、RAM708、割込みコントローラ709が存在し、第2のCPU703では通信ドライバ部710、通信上位部711、制御アプリケーションソフトウェア712が動作する。
図5では、上記の構成で第1のCPU701に搭載している制御アプリケーションソフトウェア704から第2のCPU703に搭載している制御アプリケーションソフト712に共有データを記憶するRAM708を介してデータを受け渡す詳細な手順を示している。
まず、制御アプリケーションソフトウェア704からデータ送信の要求713が通信上位部705に対して発行されると、通信上位部705は送信データ長の調整や割り付け、ビット配置の調整などの送信データの前処理714を行った後に、通信ドライバ部に対してデータの送信要求715を発行する。通信ドライバは第1のCPU701と第2のCPU703とで共有するRAM708上のデータへの排他的なアクセスを保証するためにセマフォ707を用いて716~720の排他処理を行う。排他処理は保護領域の取得処理716として、セマフォ707のテスト・アンド・セット処理717(後述)を行い、共有RAM708のあらかじめ定めた領域へのアクセス権限を得た上で、共有RAM708に書込み718を行い、保護領域の解除719の処理としてセマフォ707のclear720を行い排他処理を完了する。次に第1のCPU701、第2のCPU703に対して通信が完了したことを通知するため、割込みコントローラ709に送信完了割込み721の発生を行う。これを第1のCPU701で送信完了割込み722として取り込む。そして、割込み処理の中で、通信ドライバ部706、すなわち共有メモリ処理部の通知処理テーブル809に登録された送信完了通知814に基づいて、通信上位部705の送信完了通知723を呼出し、送信完了処理724を行う。一方、割込みコントローラ709で発生させた送信完了割込み発生721から第2のCPU703で受信完了割込み725として取り込む。そして、割込み処理の中で、通信ドライバ部710、すなわち共有メモリ処理部の通知処理テーブル809に登録された受信完了通知815に基づいて、通信上位部711の受信完了通知726を起動し、そこで通信ドライバ部710の受信処理727を呼び出す。受信処理の中でもセマフォ707を用いて728~732の排他処理を行う。そこではまず、保護領域取得処理728で、テスト・アンド・セット処理729(後述)を行い、排他領域へのアクセス権限を得た上でRAM708からデータを読出し730、これを通信上位部711の内部に保持する。そして保護領域の解除処理731の中からセマフォ707の解除処理732を行う。最後に制御アプリケーションソフト712は、通信上位部711に対し、データ取得要求733を出し、データを取得する。
また、複数の演算装置が並列で動作している状態で、データへのアクセスの競合を防ぐためにはハードウェアが介在した排他処理が必要である。図5中のテスト・アンド・セット処理717、テスト・アンド・セット処理729はそのようなハードウェアを利用したテスト・アンド・セットと呼ばれる排他処理である。この一連の処理はアトミックに行う必要がある。ある処理をアトミックに行う、とは演算装置で当該処理を実行途中では当該演算装置の割込みや他の演算装置からのデータアクセスによる中断を一切受けない性質のことである。この手順では書き込みを行うデータである変数あるいはレジスタの参照を受け取り、その値を一旦保存し、当該パラメータの変数あるいはレジスタを“true”に書き換え、もとの一旦保持したレジスタの値を返す一連の処理である。図9はC言語の記述による擬似コードになっているが、ソフトウェアによる処理のみでは前記のアトミックな処理とすることができず、この処理をハードウェアあるいは専用ハードウェア上のマイクロコードとして実装する必要がある。
以下に示すのは上記のシステムをCAN通信を用いた2台の制御コントローラに配置したハードウェアをもつ車両に移植する場合の例であり、図8はそのハードウェア構成と、データフローを表す。電子制御システム1024は、スロットルセンサ1007、水温センサ1008、エアフローセンサ1009、クランク角センサ1010から入力したエンジンの状態に基づき、点火プラグ駆動パルス1016、燃料噴射装置駆動パルス1017を出力することを目的とする。電子制御システム1024には二つの電子制御装置1001、1002が存在し、CANバス1003を介して接続しており、1001、1002は物理的に離れた場所に配置することができる。第1のCPU1018では、入力信号を取り込むためのアナログ・デジタル変換器(AD変換器1004)、を介して各種センサ(1007~1009)の情報を取り込み、第2の演算装置1019では、パルス入力回路1005を介してクランク角センサ1010の情報を取り込み、タイマ・パルス出力回路1006を介してアクチュエータ駆動信号である点火プラグ駆動パルス1016、燃料噴射装置駆動パルス1017を出力する。
本実施例ではセンサの入力をもとに外界の物理量を算出するセンサ値補正処理1027と第1OS1020を第1のCPU1018に割り当て、外界の物理量とクランク角センサから得られたエンジン回転位置をもとに点火制御1014、燃料噴射制御1015を行う処理と第2のOS1021を第2のCPU1019に割り当てている。また、制御装置間では、CANバス1003上でスロットル開度1011、水温1012、吸入空気量1013のセンサから得られた制御対象の情報を、第1の演算装置1018から送信し第2の演算装置1019で受信する。上記のようなハードウェア構成においても、エンジン制御システムを実現するためのソフトウェアの構成は図2に記載の構成で実現できる。
図7はCAN通信を用いて通信を行うために、通信ドライバ部306のCANに対応した実装方式としてCAN通信処理部901を構成した例を示したものである。CAN通信処理部は外部からアクセスする方法を定めたインターフェース部902と実際の共有メモリの読み出し、書き込み処理を行うドライバ部・テーブル部903とから構成される。インターフェース部902は送信904、受信905、送信完了906、受信完了907の4つのインターフェースを持つ。またドライバ部908には処理910~913を持ち、通知処理テーブル909には通知処理914、915を持つ。これらの構成は図6に記載の共有メモリドライバと同一であり、この部分のソフトウェアを交換することで異なるハードウェア構成のシステムに同一の制御アプリケーションソフトウェアを搭載できる。
図4は上記に記載の構成を用いてソフトウェアの処理手順の詳細を示したものである。第1のCPU601上では制御アプリケーションソフトウェア606、通信上位部607、通信ドライバ部608が動作し、第1の電子制御装置638上の周辺ハードウェア602には、割込みコントローラ609、ネットワークコントローラ610が存在する。第2の電子制御装置639に搭載の第2のCPU605では、通信ドライバ部614、通信上位部615、制御アプリケーションソフトウェア616が動作する。周辺ハードウェア604にはネットワークコントローラ612、割込みコントローラ613が動作する。
上記の構成で第1のCPU601に搭載している制御アプリケーションソフトウェア606から第2のCPU605に搭載している制御アプリケーションソフトウェア616にCANバス603を介してデータを受け渡す詳細な手順を示す。まず、制御アプリケーションソフトウェア606からデータ送信の要求617が通信上位部607に対して発行されると、通信上位部607は送信データ長の調整や割り付け、ビット配置の調整などの送信データの前処理618を行った後に、通信ドライバ部608に対してデータの送信要求619を発行する。通信ドライバ部はネットワークコントローラ610を送信に用いるための送信操作620を行うと、ネットワークコントローラ610は送信開始621を行う。送信されたデータはCANバス603を介して第2の電子制御装置639と接続する。第2の電子制御装置639に搭載のネットワークコントローラ612は、ネットワーク上の信号を検知し受信622を開始する。受信が終了すると正常に受信ができた場合には受信通知を送信623する。第1の電子制御装置638上のネットワークコントローラ1610は正常受信通知を受信624し、正常に送信完了できたことを割込みコントローラ609に通知625する。割込みコントローラ609はこれを割込みとして第1のCPU601に通知し、第1のCPU601では送信完了割込み626として、登録した通信ドライバ部、すなわちCAN通信処理部内の送信完了インターフェース906を介して送信完了処理912を実行し、ここから送信完了通知として登録された通信上位部607の送信完了通知処理627の中で送信完了処理628を行う。
一方CANバスからの受信が完了すると第2の電子制御装置639側では、受信を完了したネットワークコントローラ612から割込みコントローラ613へ受信の完了が通知629され、割込みコントローラ613から第2のCPU605に通知し、第2のCPU605では受信完了割込み処理630が起動され、この中から登録された通信上位部の受信完了通知631を実行する。次に通信上位部615はデータの受信632要求を通信ドライバ部614に対して発行し、通信ドライバ部614からネットワークコントローラ612の受信操作633を行い、データを取得して通信上位部615に保持する。第2のCPU605上で実行する制御アプリケーションソフトウェアはデータ取得634要求を発行しこれに基づいて点火制御636、燃料噴射制御637を行う。
本実施例によるソフトウェアでは、ハードウェアの構成が共有メモリによる連結か、CAN通信による連結か、という物理的な構成が変わった場合に、図6に示す共有メモリドライバのインターフェース部802と図7に示すCAN通信ドライバのインターフェース部902が同じインターフェースを有しており、さらにその処理手順においても図5に示す共有メモリの実行手順中のドライバ部の呼び出し箇所である715、723、726、727と図4に示すCAN通信の実行手順中のドライバ部の呼び出し箇所である619、627、631、632とが対応しており、通信ドライバ部のみを入れ替えることで、制御アプリケーションソフトウェアの変更無く移植することが可能となる。このため移植のための工数を削減できる。
次に、本発明の第二の実施例について説明する。本実施例の目的は、実施例1に示した図8の制御システムと同じであるが、ハードウェア構成は異なる例である。本実施例の構成を図10に示す。
二つの演算装置1202、1217が共有メモリ1203で接続された第1の電子制御装置1201と、ひとつの演算装置1211を有する第2の電子制御装置1209が、ネットワークバス1208を介して接続された制御システムである。第2の電子制御装置1209は、スロットルセンサ1212から得た入力値を、AD変換器1210を用いて取り込み、第3の演算装置1211上で動作するソフトウェアであるセンサ値補正処理1213によりスロットル開度の値を算出する。算出された値はネットワークコントローラ1215を介してCANバス1208上に送信される。第1の電子制御装置1201は、ネットワークコントローラ1216からこのデータを取得し、点火制御、燃料噴射制御を行う。また、第1の演算装置1202には図6に示す共有メモリ処理部が実装され、第2の演算装置1217には図6に示す共有メモリ処理部と図7に示すCAN通信処理部が実装され、第3の演算装置1211には図7に示すCAN通信処理部が搭載される。第一の実施例と同様に、図6の共有メモリ処理部と図7CAN通信処理部は、ともに同一のインターフェース部802、902を有する。
本実施例の構成によれば、それぞれの演算装置上に搭載されるアプリケーションソフトウェアを変更することなく移植することが可能となる。これにより、複数の演算装置の間で動作するソフトウェアの負荷率にバラツキがある場合、負荷率の高い演算装置上の制御アプリケーションソフトウェアを余裕のある演算装置に移植することが可能となるため、電子制御装置の性能や容量により最適化したソフトウェアの構成の変更を制御アプリケーションソフトウェアを変更することなく可能となり、ソフトウェアの変更工数を削減することが可能となる。
上記記載は実施例についてなされたが、本発明はそれに限らず、本発明の精神と添付の請求の範囲の範囲内で種々の変更および修正をすることができることは当業者に明らかである。
上記記載は実施例についてなされたが、本発明はそれに限らず、本発明の精神と添付の請求の範囲の範囲内で種々の変更および修正をすることができることは当業者に明らかである。
201 マイコン
202 入力回路
203 第1の読出し専用メモリ
204 第1の揮発性読書きメモリ
205 第1の中央演算装置
206 共通の揮発性読書きメモリ
207 共通の読出し専用メモリ
208 第2の読出し専用メモリ
209 第2の揮発性読書きメモリ
210 第2の中央演算装置
211 出力回路
212 割込み制御回路
213 入力信号回路
214 駆動回路
215 コントロールユニット
216 センサ
217 アクチュエータ
301 制御アプリケーションソフトウェア部品
302 部品接続部
303 第1ソフトウェア
304 オペレーティングシステム
305、607、615、705、711 通信上位部
306、608、614、706、710 通信ドライバ部
307、401、1018 第1の演算装置
309 第2ソフトウェア
310 物理接続
311 論理接続
312、901 通信処理部
313 アプリケーションソフトウェア部
314、402、1019 第2の演算装置
403 共有メモリ
404、1004 AD変換器
405、1005 パルス入力回路
406、1006 タイマ・パルス出力回路
407、1007 スロットルセンサ
408、1008 水温センサ
409、1009 エアフローセンサ
410、1010 クランク角センサ
411、1011 スロットル開度
412、1012 水温
413 吸入空気量
414、1014 点火制御
415、1015 燃料噴射制御
416、1016 点火プラグ駆動パルス
417、1017 燃料噴射装置駆動パルス
418 電子制御ユニット
419 センサ値補正処理
420、1020 第1OS
421、1021 第2OS
601、701 第1のCPU
602、604 周辺ハードウェア
603、1003 CANバス
605、703 第2のCPU
606、616、704 制御アプリケーションソフトウェア
609、613、709 割込みコントローラ
610、612 ネットワークコントローラ
617、713 要求
618、714 前処理
619、715 送信要求
620 送信操作
621 開始
702 ハードウェア
707 セマフォ
708 RAM
712 制御アプリケーションソフト
716 取得処理
717、729 テスト・アンド・セット処理
718 書込み
719 解除
720 clear
721 送信完了割込み発生
722 送信完了割込み
723、814 送信完了通知
724 送信完了処理
725 受信完了割込み
726、815 受信完了通知
727 受信処理
728 保護領域取得処理
730 読出し
731、732 解除処理
733 データ取得要求
801 共有メモリ処理部
802、902 インターフェース部
803、903 ドライバ部・テーブル部
804、904 送信
805、905 受信
806、906 送信完了
807、907 受信完了
809 通知処理テーブル
1001 第1の電子制御装置
1002 第2の電子制御装置
1013 空気量
1024 電子制御システム
202 入力回路
203 第1の読出し専用メモリ
204 第1の揮発性読書きメモリ
205 第1の中央演算装置
206 共通の揮発性読書きメモリ
207 共通の読出し専用メモリ
208 第2の読出し専用メモリ
209 第2の揮発性読書きメモリ
210 第2の中央演算装置
211 出力回路
212 割込み制御回路
213 入力信号回路
214 駆動回路
215 コントロールユニット
216 センサ
217 アクチュエータ
301 制御アプリケーションソフトウェア部品
302 部品接続部
303 第1ソフトウェア
304 オペレーティングシステム
305、607、615、705、711 通信上位部
306、608、614、706、710 通信ドライバ部
307、401、1018 第1の演算装置
309 第2ソフトウェア
310 物理接続
311 論理接続
312、901 通信処理部
313 アプリケーションソフトウェア部
314、402、1019 第2の演算装置
403 共有メモリ
404、1004 AD変換器
405、1005 パルス入力回路
406、1006 タイマ・パルス出力回路
407、1007 スロットルセンサ
408、1008 水温センサ
409、1009 エアフローセンサ
410、1010 クランク角センサ
411、1011 スロットル開度
412、1012 水温
413 吸入空気量
414、1014 点火制御
415、1015 燃料噴射制御
416、1016 点火プラグ駆動パルス
417、1017 燃料噴射装置駆動パルス
418 電子制御ユニット
419 センサ値補正処理
420、1020 第1OS
421、1021 第2OS
601、701 第1のCPU
602、604 周辺ハードウェア
603、1003 CANバス
605、703 第2のCPU
606、616、704 制御アプリケーションソフトウェア
609、613、709 割込みコントローラ
610、612 ネットワークコントローラ
617、713 要求
618、714 前処理
619、715 送信要求
620 送信操作
621 開始
702 ハードウェア
707 セマフォ
708 RAM
712 制御アプリケーションソフト
716 取得処理
717、729 テスト・アンド・セット処理
718 書込み
719 解除
720 clear
721 送信完了割込み発生
722 送信完了割込み
723、814 送信完了通知
724 送信完了処理
725 受信完了割込み
726、815 受信完了通知
727 受信処理
728 保護領域取得処理
730 読出し
731、732 解除処理
733 データ取得要求
801 共有メモリ処理部
802、902 インターフェース部
803、903 ドライバ部・テーブル部
804、904 送信
805、905 受信
806、906 送信完了
807、907 受信完了
809 通知処理テーブル
1001 第1の電子制御装置
1002 第2の電子制御装置
1013 空気量
1024 電子制御システム
Claims (9)
- 複数の中央演算装置と、前記複数の中央演算装置が共有する共有記憶メモリと、を備える電子制御装置上で動作する制御ソフトウェアであって、
前記制御ソフトウェアは前記電子制御装置への入出力処理を行う基本ソフトウェアを有し、
前記基本ソフトウェアは、前記電子制御装置が接続されるネットワークの通信に用いるインターフェースと同じインターフェースを用いて前記共有記憶メモリのデータの読み書きを行うことを特徴とする制御ソフトウェア。 - 前記基本ソフトウェアは、前記共有記憶メモリのデータの読み書きを行う共有メモリ処理部と、前記ネットワークとの通信を行う通信処理部とを備え、前記共有メモリ処理部と、前記通信処理部とが互換性のあるインターフェースを備えることを特徴とする請求項1に記載の制御ソフトウェア。
- 前記基本ソフトウェアは、対象の制御を行う制御アプリケーション部を有し、前記制御アプリケーション部には制御アプリケーションソフトウェア部品を備え、前記制御ソフトウェアは、前記制御アプリケーションソフトウェア部品と前記基本ソフトウェアとを接続する接続部を有することを特徴とする請求項1に記載の制御ソフトウェア。
- 前記基本ソフトウェアは、ハードウェアにより処理の中断がないことを保証された処理を呼び出すことを特徴とする請求項1に記載の制御ソフトウェア。
- 前記基本ソフトウェアは、ハードウェアにより処理の中断がないことを保証されたテスト・アンド・セット命令を呼び出すことを特徴とする請求項1に記載の制御ソフトウェア。
- 前記基本ソフトウェアは、排他処理の管理を行うセマフォの処理を有することを特徴とする請求項1に記載の制御ソフトウェア。
- 前記共有メモリ処理部は送信に用いるインターフェースと、受信に用いるインターフェースとを有することを特徴とする請求項2に記載の制御ソフトウェア。
- 前記共有メモリ処理部には送信完了処理へのポインタと受信完了処理へのポインタを格納したテーブルを有することを特徴とする請求項2に記載の制御ソフトウェア。
- 複数の中央演算装置と、前記複数の中央演算装置が共有する共有記憶メモリと、を備える電子制御装置であって、
前記電子制御装置は、前記電子制御装置が接続されるネットワークの通信に用いるインターフェースと同じインターフェースを用いて前記共有記憶メモリのデータの読み書きを行うことを特徴とする電子制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/919,327 US20110066814A1 (en) | 2008-09-03 | 2009-07-14 | Control software for distributed control, and electronic control device |
| EP09811365A EP2328095A4 (en) | 2008-09-03 | 2009-07-14 | CONTROL SOFTWARE FOR DISTRIBUTED CONTROL, AND ELECTRONIC CONTROL DEVICE |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008-225431 | 2008-09-03 | ||
| JP2008225431A JP4920015B2 (ja) | 2008-09-03 | 2008-09-03 | 分散制御用制御ソフトウェアおよび電子制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2010026836A1 true WO2010026836A1 (ja) | 2010-03-11 |
Family
ID=41797009
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/062730 WO2010026836A1 (ja) | 2008-09-03 | 2009-07-14 | 分散制御用制御ソフトウェアおよび電子制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20110066814A1 (ja) |
| EP (1) | EP2328095A4 (ja) |
| JP (1) | JP4920015B2 (ja) |
| WO (1) | WO2010026836A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2002043016A1 (fr) | 2000-11-21 | 2002-05-30 | Cyber-Comm | Procede et dispositif d'authentification |
| JP2017520829A (ja) * | 2014-06-05 | 2017-07-27 | マイクロチップ テクノロジー インコーポレイテッドMicrochip Technology Incorporated | マルチプロセッサコアデバイスのためにデバイスピン所有権を割り当てるためのデバイスおよび方法 |
| US9925935B2 (en) | 2012-08-24 | 2018-03-27 | Mitsubishi Electric Corporation | In-vehicle communication system and in-vehicle communication method |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080316004A1 (en) * | 2007-06-19 | 2008-12-25 | Kiko Frederick J | Powerline communication apparatus and methods |
| KR20090095955A (ko) * | 2008-03-07 | 2009-09-10 | 삼성전자주식회사 | 불휘발성 메모리의 공유 구조에서 다이렉트 억세스 기능을제공하는 멀티포트 반도체 메모리 장치 및 그를 채용한멀티 프로세서 시스템 |
| US10493289B2 (en) | 2010-07-09 | 2019-12-03 | Zoll Medical Corporation | System and method for conserving power in a medical device |
| DE102011012187A1 (de) | 2011-02-23 | 2012-08-23 | Continental Automotive Gmbh | Verfahren zum Konfigurieren einer Steuervorrichtung für ein Kraftfahrzeug, Computerprogramm und Steuervorrichtung |
| CN102520675B (zh) * | 2011-10-23 | 2014-03-12 | 西安交通大学 | 燃气联合循环与太阳能发电联合制热系统及其调度方法 |
| DE102016106939B4 (de) | 2015-04-17 | 2024-05-02 | Suunto Oy | Eingebettetes Rechengerät |
| GB2542988B (en) * | 2015-04-17 | 2019-11-13 | Suunto Oy | Embedded computing device comprising processing units interfaced with a shared information space |
| JP6438381B2 (ja) * | 2015-12-14 | 2018-12-12 | 日立オートモティブシステムズ株式会社 | 電子制御装置 |
| JP6558317B2 (ja) * | 2016-07-12 | 2019-08-14 | 株式会社デンソー | 電子装置 |
| FR3065550A1 (fr) * | 2017-09-29 | 2018-10-26 | Continental Automotive France | Procede d'echange protege de donnees entre deux taches |
| KR102248285B1 (ko) * | 2020-07-14 | 2021-05-06 | 주식회사에어플러그 | 필요한 정보를 통지받기 위한 이벤트에 대한 최적화된 그룹기반의 가입 방법과 그 방법을 위한 기기 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10243004A (ja) | 1997-02-21 | 1998-09-11 | Honda Motor Co Ltd | 車両用ネットワークシステムと車載用オペレーティングシステム |
| JP3460593B2 (ja) | 1998-09-17 | 2003-10-27 | 株式会社デンソー | 車両用制御装置 |
| JP2004240890A (ja) * | 2003-02-07 | 2004-08-26 | Nec Corp | ミドルウェア透過分散アプリケーションアクセス方式 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7269666B1 (en) * | 2000-06-30 | 2007-09-11 | Intel Corporation | Memory utilization in a network interface |
| US6925547B2 (en) * | 2000-12-14 | 2005-08-02 | Silicon Graphics, Inc. | Remote address translation in a multiprocessor system |
| US7099660B2 (en) * | 2000-12-22 | 2006-08-29 | Bellsouth Intellectual Property Corp. | System, method and apparatus for a network-organized repository of data |
| JP3903734B2 (ja) * | 2001-05-09 | 2007-04-11 | 株式会社日立製作所 | 車両データアクセス方法および車載端末 |
| JP2004362411A (ja) * | 2003-06-06 | 2004-12-24 | Mitsubishi Electric Corp | ネットワーク接続機能を有する数値制御装置 |
| JP3961511B2 (ja) * | 2004-06-28 | 2007-08-22 | エヌイーシーコンピュータテクノ株式会社 | データ処理システム、処理装置、記憶装置、及びメモリアクセス制御方法 |
| JP2008046969A (ja) * | 2006-08-18 | 2008-02-28 | Fujitsu Ltd | 共有メモリのアクセス監視方法及び装置 |
| JP4476267B2 (ja) * | 2006-10-06 | 2010-06-09 | 株式会社日立製作所 | プロセッサ及びデータ転送ユニット |
-
2008
- 2008-09-03 JP JP2008225431A patent/JP4920015B2/ja active Active
-
2009
- 2009-07-14 WO PCT/JP2009/062730 patent/WO2010026836A1/ja active Application Filing
- 2009-07-14 US US12/919,327 patent/US20110066814A1/en not_active Abandoned
- 2009-07-14 EP EP09811365A patent/EP2328095A4/en not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10243004A (ja) | 1997-02-21 | 1998-09-11 | Honda Motor Co Ltd | 車両用ネットワークシステムと車載用オペレーティングシステム |
| JP3460593B2 (ja) | 1998-09-17 | 2003-10-27 | 株式会社デンソー | 車両用制御装置 |
| JP2004240890A (ja) * | 2003-02-07 | 2004-08-26 | Nec Corp | ミドルウェア透過分散アプリケーションアクセス方式 |
Non-Patent Citations (2)
| Title |
|---|
| 25 May 1990, IWANAMI SHOTEN, PUBLISHERS, article "Iwanami Joho Kagaku Jiten", pages: 395, 489 * |
| See also references of EP2328095A4 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2002043016A1 (fr) | 2000-11-21 | 2002-05-30 | Cyber-Comm | Procede et dispositif d'authentification |
| US9925935B2 (en) | 2012-08-24 | 2018-03-27 | Mitsubishi Electric Corporation | In-vehicle communication system and in-vehicle communication method |
| JP2017520829A (ja) * | 2014-06-05 | 2017-07-27 | マイクロチップ テクノロジー インコーポレイテッドMicrochip Technology Incorporated | マルチプロセッサコアデバイスのためにデバイスピン所有権を割り当てるためのデバイスおよび方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110066814A1 (en) | 2011-03-17 |
| JP4920015B2 (ja) | 2012-04-18 |
| EP2328095A1 (en) | 2011-06-01 |
| EP2328095A4 (en) | 2012-11-07 |
| JP2010061324A (ja) | 2010-03-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4920015B2 (ja) | 分散制御用制御ソフトウェアおよび電子制御装置 | |
| JP5816572B2 (ja) | 車両用制御装置 | |
| EP1703391B1 (en) | Vehicle control software and vehicle control apparatus | |
| US20110161644A1 (en) | Information processor | |
| JP2013161299A (ja) | 情報処理装置、インタフェースアクセス方法 | |
| US7930523B2 (en) | Inter-CPU data transfer device | |
| JP5533789B2 (ja) | 車載電子制御装置 | |
| CN114780248A (zh) | 资源访问方法、装置、计算机设备及存储介质 | |
| WO2022009741A1 (ja) | 電子制御装置 | |
| JP7554602B2 (ja) | スプリット・モード及びロック・モードを有する処理クラスタにおける効率的なメモリ利用 | |
| JP2004234530A (ja) | マイクロコンピュータのロジック開発装置 | |
| US12071149B2 (en) | Vehicle control device including asynchronous driver | |
| US9946665B2 (en) | Fetch less instruction processing (FLIP) computer architecture for central processing units (CPU) | |
| JP3827565B2 (ja) | マイコンのロジック開発装置 | |
| JP7204443B2 (ja) | 車両制御装置およびプログラム実行方法 | |
| JP5085719B2 (ja) | 車両制御用ソフトウェア及び車両制御装置 | |
| JP7518756B2 (ja) | 電子制御装置 | |
| JP6466269B2 (ja) | 電子制御装置及びスタック領域の使用監視方法 | |
| JP2001188745A (ja) | 制御装置及び制御方法 | |
| WO2017002939A1 (ja) | 電子制御装置及びスタック使用方法 | |
| US20220357973A1 (en) | Processing system, related integrated circuit, device and method | |
| Schneider et al. | Safety Issues of Integrating IVI and ADAS functionality via running Linux and AUTOSAR in parallel on a Dual-Core-System | |
| CN118353859A (zh) | 一种基于消息机制的安全跨域通信方法、系统及车辆 | |
| EP1990725A1 (en) | Central processing unit, central processing unit control method, and information processing system | |
| JP2021060758A (ja) | 車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09811365 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2009811365 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 12919327 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |