WO2009084344A1 - ステッピングモータ及びそのステッピングモータを用いた計器装置 - Google Patents
ステッピングモータ及びそのステッピングモータを用いた計器装置 Download PDFInfo
- Publication number
- WO2009084344A1 WO2009084344A1 PCT/JP2008/071272 JP2008071272W WO2009084344A1 WO 2009084344 A1 WO2009084344 A1 WO 2009084344A1 JP 2008071272 W JP2008071272 W JP 2008071272W WO 2009084344 A1 WO2009084344 A1 WO 2009084344A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- gear
- rotor magnet
- stepping motor
- rotating
- output
- Prior art date
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R7/00—Instruments capable of converting two or more currents or voltages into a single mechanical displacement
- G01R7/04—Instruments capable of converting two or more currents or voltages into a single mechanical displacement for forming a quotient
- G01R7/06—Instruments capable of converting two or more currents or voltages into a single mechanical displacement for forming a quotient moving-iron type
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D2213/00—Indexing scheme relating to constructional details of indicators
- G01D2213/10—Drivers for gauges
Definitions
- the present invention relates to a stepping motor and an instrument device using the stepping motor, and more particularly to a stepping motor capable of reliably retaining an output shaft at a predetermined position and an instrument device using the stepping motor.
- Some conventional stepping motors are provided with a fixed magnet around the rotor magnet in order to keep the rotor magnet in a predetermined position (see, for example, Patent Document 1). Japanese Patent Laid-Open No. 2001-41981
- the present invention pays attention to the above-mentioned problems, and a stepping motor that can reliably keep the output shaft in a predetermined position and can keep the product cost low, and an instrument device using the stepping motor
- the purpose is to provide.
- the present invention includes a multi-pole magnetized rotor magnet, a rotor gear provided coaxially with the rotor magnet and rotating as the rotor magnet rotates, a first gear meshing with the rotor gear, and the first gear.
- An intermediate gear having a second gear provided coaxially with the other gear, an output gear meshing with the second gear of the intermediate gear, and a drive arranged around the rotor magnet and output from the control means
- An excitation coil that generates a rotating magnetic field by inputting a waveform and applies a rotational force to the rotor magnet, a first rotating shaft that serves as a rotation center of the rotor magnet, and a second that serves as a rotation center of the intermediate gear.
- the second rotation shaft or the output shaft is made of a magnetic member, and the rotating magnetic field is generated in the excitation coil.
- the present invention also includes a rotor magnet magnetized with multiple poles, a rotor gear provided coaxially with the rotor magnet and rotating as the rotor magnet rotates, a first gear meshing with the rotor gear, An intermediate gear having a second gear provided coaxially with the first gear, an output gear meshing with the second gear of the intermediate gear, and an output gear arranged around the rotor magnet and output from the control means.
- An excitation coil that generates a rotating magnetic field by inputting a driving waveform, a first rotating shaft that becomes a rotation center of the rotor magnet, and a rotation center of the intermediate gear
- An instrument device using a stepping motor having a second rotation shaft and an output shaft serving as a rotation center of the output gear, the pointer being attached to the output shaft, and disposed behind the pointer Display
- a stopper means for holding the pointer at a predetermined position of the display plate, the second rotating shaft or the output shaft is made of a magnetic member, and when the rotating magnetic field is not generated in the exciting coil, By pulling with the rotor magnet, the pointer is held at the predetermined position determined by the stopper means.
- the present invention is provided with a case member that accommodates at least the output shaft, and the stopper means includes a first protrusion provided on the output gear and a second protrusion provided on the case member. It is what is done.
- the stopper means comprises a protrusion provided on the display plate.
- the magnetic pole peak position of the rotor magnet that is attracted to the second rotating shaft or the output shaft is the first rotating shaft and the first rotating shaft when the pointer is in contact with the predetermined position.
- the number of magnetic poles of the rotor magnet is n (n is an integer) in a direction away from the predetermined position with respect to a straight line connecting the two rotation axes or the output shaft, the value is within (360 / 2n) degrees. Is provided at an angle of.
- a stepping motor and its stepping motor that can achieve the intended purpose, can reliably keep the output shaft in a predetermined position, and can reduce the product cost.
- the instrument device used can be provided.
- the output shaft can be reliably held at a predetermined position, and the product cost can be kept low.
- a motor can be provided.
- the output shaft can be securely held at a predetermined position, and the product cost can be kept low.
- An instrument device using a motor can be provided.
- the stopper means can physically hold the pointer at a predetermined position, and it is possible to prevent the pointer from coming into contact with the stopper means and jumping up.
- the stopper means is configured inside the stepping motor, there is no need to provide a projection on the display board of the instrument device, the display board can be made a simple design, and a dedicated projection must be provided. Product costs can be kept low because there is no such thing.
- the stopper means can physically hold the pointer at a predetermined position, and the pointer can be prevented from jumping up against the stopper means. Further, since the stopper means is provided on the display board, the accuracy of the predetermined position determined by the stopper means can be easily improved.
- the pointer since the rotational force is applied in the direction in which the pointer is further rotated in the direction of the predetermined position while the pointer is held at the predetermined position by the stopper means, the pointer is surely predetermined. Can be kept in the position.
- the top view of the stepping motor of one embodiment of the present invention Sectional drawing of the AA line in FIG.
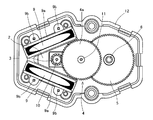
- the top view of the stepping motor which removed the upper case of the embodiment.
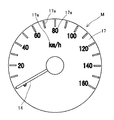
- the front view of the instrument apparatus using the stepping motor of the embodiment Explanatory drawing of the embodiment.
- the stepping motor 1 used in the meter device M of the present embodiment includes a rotor magnet 2 magnetized with multiple poles, a rotor gear 3 fixed to the rotor magnet 2, a first gear 4a meshing with the rotor gear 3, and this An intermediate gear 4 having a first gear 4a and a second gear 4b provided on the same axis, an output gear 5 meshing with the second gear 4b of the intermediate gear 4, a rotating magnetic field and generating a rotor magnet 2
- Two exciting coils 9 for applying a rotational force to the metal a first rotating shaft 10 made of metal serving as the rotation center of the rotor magnet 2, a second rotating shaft 11 made of metal serving as the rotation center of the intermediate gear 4,
- the rotor magnet 2 is made of a synthetic resin having magnetism called a so-called plastic magnet, and has a circular shape and a donut shape with a through hole in the center.
- the rotor gear 3 and the first rotating shaft 10 pass through this through hole.
- the rotor magnet 2 includes a large number of magnetic poles so as to be uniform in the radial direction around the rotation axis. In this embodiment, two N poles and two S poles are provided for a total of four magnetic poles. Therefore, when the rotation is performed with the first rotation shaft 10 as the central axis, the outer circumferential surface of the rotor magnet 2 is multipolarly magnetized along the rotation direction.
- the rotor gear 3 is made of synthetic resin not having magnetism, and rotates with the rotation of the rotor magnet 2 as described above. Further, the first rotating shaft 10 passes through the rotor gear 3.
- the intermediate gear 4 is made of a synthetic resin not having magnetism, and integrally includes a first gear 4a and a second gear 4b.
- the first gear 4 a meshes with the rotor gear 3.
- the second gear 4 b meshes with the output gear 5.
- the first gear 4a and the second gear 4b are provided coaxially.
- the intermediate gear 4 is provided with a second rotation shaft 11 serving as a rotation center.
- the 2nd rotating shaft 11 consists of a magnetic member, and attracts the rotor magnet 2 with magnetic force.
- the output gear 5 is also made of a synthetic resin not having magnetism, and meshes with the second gear 4b of the intermediate gear 4.
- the output gear 5 is provided with an output shaft 6 serving as a rotation center.
- a first protrusion 15 a constituting the stopper means 15 is integrally provided on the lower surface of the output gear 5.
- the first protrusion 15a abuts on a second protrusion 15b provided on the case member 12, which will be described later, and stops the rotation of the output gear 5 at a predetermined position.
- the intermediate gear 4 and the output gear 5 transmit the rotation of the rotor magnet 2 while decelerating it.
- the exciting coil 9 is formed by winding a conductive metal wire such as copper around a bobbin 9a made of synthetic resin.
- the exciting coil 9 is connected to control means via a terminal 9b provided on the bobbin 9a.
- the bobbin 9a is a cylinder provided with a through hole having a rectangular cross-sectional shape. And the exciting coil 9 is arrange
- the inner peripheral surfaces of are facing each other.
- the two excitation coils 9 are respectively input with drive waveforms output from control means (not shown), so that a rotating magnetic field is generated in the rotor magnet 2 and a rotational force is applied to the rotor magnet 2. .
- the case member 12 is made of a synthetic resin not having magnetism and is divided into upper and lower parts.
- the case member 12 divided in the vertical direction is fixed by hooking a locking claw 12a provided on each case member 12.
- the case member 12 is integrally provided with a second projecting portion 15 b that abuts on the first projecting portion 15 a provided on the output gear 5.
- the case member 12 supports the first rotating shaft 10, the second rotating shaft 11, and the output shaft 6 in a rotatable manner.
- FIG. 4 shows the stepping motor 1 used for the instrument device M.
- the instrument device M of the present embodiment displays the speed of the vehicle using the pointer 14.
- the pointer 14 is attached to the output shaft 6. Behind the pointer 14 is provided a display board 17 provided with indicator portions 17a such as scales and characters indicated by the pointer 14. The pointer 14 is held at a predetermined position, that is, a position indicating “0” of the vehicle speed in this embodiment by the stopper means 15 provided in the stepping motor 1.
- FIG. 5 shows a state in which the first protrusion 15a and the second protrusion 1b constituting the stopper means 15 are in contact with each other, whereby the pointer 14 is in contact with a predetermined position.
- the rotor magnet 3 is provided with four magnetic poles.
- the boundary line B of each magnetic pole is indicated by a dotted line. Between the boundary line B and the boundary line B is the peak position of each magnetic pole.
- the upper left and lower right of the rotor magnet 3 are N poles, and the lower left and upper right are S poles.
- the second rotating shaft 11 is the right of the rotor magnet 2 in FIG.
- the lower N pole is attracted in the direction of arrow R1 in FIG.
- r is disposed at a position within 45 degrees in a direction (opposite to the arrow R1) in which the pointer 14 is away from a predetermined position (contact position of the stopper means 15).
- the angle of 45 degrees is an angle obtained by (360 / 2n) where n is the number of magnetic poles of the rotor magnet 2 (n is an integer).
- n is the number of magnetic poles of the rotor magnet 2
- the expression is 360/2 ⁇ 4, and 45 degrees is obtained.
- the second rotating shaft 11 is formed from a magnetic member.
- the present invention is not limited to this embodiment, and the output shaft 6 may be formed from a magnetic member. Also in this case, the same effect as the above embodiment can be obtained.
- the stopper means 15 is the first protrusion 15a provided on the output gear 5 and the second protrusion 15b provided on the case member 12.
- the stopper means 15 is limited to this embodiment.
- the display plate 17 may be provided with a protrusion on which the pointer 14 abuts. By comprising in this way, the precision of the predetermined position defined by the said projection part can be improved easily.
- the present invention can be applied to a stepping motor and an instrument device using the stepping motor.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Control Of Stepping Motors (AREA)
Abstract
出力軸を確実に所定の位置に留めることが可能で、かつ、製品コストを低く抑えることが可能なステッピングモータ及びそのステッピングモータを用いた計器装置を提供する。
多極着磁されたロータ磁石2と、ロータ磁石2に同軸上に設けられロータ磁石2の回転に伴って回転するロータ歯車3と、ロータ歯車3と噛み合う第1の歯車4aとこの第1の歯車4aと同軸上に設けられた第2の歯車4bとを有する中間歯車4と、中間歯車4の第2の歯車4bと噛み合う出力歯車5と、ロータ磁石2の周囲に配置され制御手段から出力される駆動波形を入力されることによって回転磁界を発生してロータ磁石2に回転力を与える励磁コイル9と、ロータ磁石9の回転中心となる第1の回転軸10と、中間歯車4の回転中心となる第2の回転軸11と、出力歯車5の回転中心となる出力軸6と、を有するステッピングモータ1において、第2の回転軸11または出力軸6は磁性部材からなり、励磁コイル9に回転磁界が発生していない際に、ロータ磁石2と引き合うことによって、出力軸6を所定の位置に留めておくものである。
Description
本発明は、ステッピングモータ及びそのステッピングモータを用いた計器装置に関するもので、特に出力軸を確実に所定の位置に留めることが可能なステッピングモータ及びそのステッピングモータを用いた計器装置に関するものである。
従来のステッピングモータは、ロータ磁石を所定の位置に留めておくために、ロータ磁石の周辺に固定磁石を設けたものがあった(例えば、特許文献1参照)。
特開2001-41981号公報
しかしながら、このようなステッピングモータは、専用の固定磁石を必要とするため、製品コストを高くしてしまうという問題点を有していた。
そこで、本発明は前述した問題点に着目し、出力軸を確実に所定の位置に留めることが可能で、かつ、製品コストを低く抑えることが可能なステッピングモータ及びそのステッピングモータを用いた計器装置を提供することを目的とする。
本発明は、多極着磁されたロータ磁石と、前記ロータ磁石に同軸上に設けられ前記ロータ磁石の回転に伴って回転するロータ歯車と、前記ロータ歯車と噛み合う第1の歯車とこの第1の歯車と同軸上に設けられた第2の歯車とを有する中間歯車と、前記中間歯車の前記第2の歯車と噛み合う出力歯車と、前記ロータ磁石の周囲に配置され制御手段から出力される駆動波形を入力されることによって回転磁界を発生して前記ロータ磁石に回転力を与える励磁コイルと、前記ロータ磁石の回転中心となる第1の回転軸と、前記中間歯車の回転中心となる第2の回転軸と、前記出力歯車の回転中心となる出力軸と、を有するステッピングモータにおいて、前記第2の回転軸または出力軸は磁性部材からなり、前記励磁コイルに前記回転磁界が発生していない際に、前記ロータ磁石と引き合うことによって、前記出力軸を所定の位置に留めておくものである。
また、本発明は、多極着磁されたロータ磁石と、前記ロータ磁石に同軸上に設けられ前記ロータ磁石の回転に伴って回転するロータ歯車と、前記ロータ歯車と噛み合う第1の歯車とこの第1の歯車と同軸上に設けられた第2の歯車とを有する中間歯車と、前記中間歯車の前記第2の歯車と噛み合う出力歯車と、前記ロータ磁石の周囲に配置され制御手段から出力される駆動波形を入力されることによって回転磁界を発生して前記ロータ磁石に回転力を与える励磁コイルと、前記ロータ磁石の回転中心となる第1の回転軸と、前記中間歯車の回転中心となる第2の回転軸と、前記出力歯車の回転中心となる出力軸と、を有するステッピングモータを用いた計器装置であって、前記出力軸に装着される指針と、前記指針の背後に配設される表示板と、前記指針を前記表示板の所定の位置に留めるストッパ手段とを備え、前記第2の回転軸または出力軸は磁性部材からなり、前記励磁コイルに前記回転磁界が発生していない際に、前記ロータ磁石と引き合うことによって、前記指針を前記ストッパ手段によって定められる前記所定の位置に留めておくものである。
また、本発明は、少なくとも前記出力軸を収容するケース部材を設け、前記ストッパ手段は、前記出力歯車に設けた第1の突起部と、前記ケース部材に設けた第2の突起部とから構成されるものである。
また、本発明は、前記ストッパ手段は、前記表示板に設けられた突起部からなるものである。
また、本発明は、前記指針が前記所定の位置に当接している状態において、前記第2の回転軸または出力軸と引き合っている前記ロータ磁石の磁極ピーク位置は、第1の回転軸と第2の回転軸または出力軸とを結ぶ直線に対して、前記指針が前記所定の位置から離れる方向に、前記ロータ磁石の磁極数をn(nは整数)とすると、(360/2n)度以内の角度に設けられているものである。
本発明によれば、所期の目的を達成することができ、出力軸を確実に所定の位置に留めることが可能で、かつ、製品コストを低く抑えることが可能なステッピングモータ及びそのステッピングモータを用いた計器装置を提供することができる。
請求項1に記載の発明は、第2の回転軸または出力軸を磁性部材としたことによって、出力軸を確実に所定の位置に留めることでき、また、製品コストを低く抑えることが可能なステッピングモータを提供することができる。
請求項2に記載の発明は、第2の回転軸または出力軸を磁性部材としたことによって、出力軸を確実に所定の位置に留めることでき、また、製品コストを低く抑えることが可能なステッピングモータを用いた計器装置を提供することができる。
請求項3に記載の発明は、ストッパ手段が所定の位置に指針を物理的に留めることができ、また、指針がストッパ手段に当接して跳ね上がることを防止できる。また、ストッパ手段をステッピングモータ内部で構成しているため、計器装置の表示板に突起部を設ける必要がなく、表示板を簡素なデザインにすることができ、また、専用の突起部を設ける必要がないため製品コストを低く抑えることができる。
請求項4に記載の発明は、ストッパ手段が所定の位置に指針を物理的に留めることができ、また、指針がストッパ手段に当接して跳ね上がることを防止できる。また、表示板にストッパ手段を設けるため、ストッパ手段によって定められる所定の位置の精度を容易に向上させることができる。
請求項5に記載の発明は、ストッパ手段によって指針が所定の位置に留められている状態でさらに所定の位置方向に指針を回転させる方向に回転力が与えられているため、指針を確実に所定の位置に留めておくことができる。
1 ステッピングモータ
2 ロータ磁石
3 ロータ歯車
4 中間歯車
4a 第1の歯車
4b 第2の歯車
5 出力歯車
6 出力軸
9 励磁コイル
10 第1の回転軸
11 第2の回転軸
12 ケース部材
14 指針
15 ストッパ手段
15a 第1の突起部
15b 第2の突起部
17 表示板
M 計器装置
2 ロータ磁石
3 ロータ歯車
4 中間歯車
4a 第1の歯車
4b 第2の歯車
5 出力歯車
6 出力軸
9 励磁コイル
10 第1の回転軸
11 第2の回転軸
12 ケース部材
14 指針
15 ストッパ手段
15a 第1の突起部
15b 第2の突起部
17 表示板
M 計器装置
以下、本発明の実施形態を、ステッピングモータを用いた計器装置に基づいて説明する。図1から図5は、本発明の一実施形態を示すものである。
本実施形態の計器装置Mに用いられるステッピングモータ1は、多極着磁されたロータ磁石2と、ロータ磁石2に固定されたロータ歯車3と、ロータ歯車3と噛み合う第1の歯車4aとこの第1の歯車4aと同軸上に設けられた第2の歯車4bとを有する中間歯車4と、中間歯車4の第2の歯車4bと噛み合う出力歯車5と、回転磁界を発生してロータ磁石2に回転力を与える2つの励磁コイル9と、ロータ磁石2の回転中心となる金属製の第1の回転軸10と、中間歯車4の回転中心となる金属製の第2の回転軸11と、出力歯車5の回転中心となる出力軸6と、ロータ磁石2、ロータ歯車3、中間歯車4、出力歯車5、出力軸6、励磁コイル9、第1の回転軸10、第2の回転軸11を収容するケース部材12とを有するものである。
ロータ磁石2は、いわゆるプラスチックマグネットと呼ばれる磁性を有する合成樹脂からなり、その形状は円形で、中心に貫通孔を備えたドーナツ形状である。この貫通孔を、ロータ歯車3と第1の回転軸10が貫通している。ロータ磁石2は、その回転軸を中心として、放射方向に均等となるように、多くの磁極を備えている。本実施形態では、N極が2つ、S極が2つの計4つの磁極を備えている。従って、第1の回転軸10を中心の軸として、回転すると、ロータ磁石2の外周面に回転方向に沿って多極着磁されている。
ロータ歯車3は、磁性を備えていない合成樹脂からなり、前述したように、ロータ磁石2の回転に伴って回転する。また、第1の回転軸10がロータ歯車3を貫通している。
中間歯車4は、磁性を備えていない合成樹脂からなり、第1の歯車4aと第2の歯車4bとを一体に備えている。第1の歯車4aは、ロータ歯車3と噛み合う。また、第2の歯車4bは、出力歯車5と噛み合う。第1の歯車4aと第2の歯車4bとは、同軸上に設けられている。また、中間歯車4には、回転中心となる第2の回転軸11が設けられている。第2の回転軸11は、磁性部材からなり、磁力によってロータ磁石2を引きつけるものである。
出力歯車5も、ロータ歯車3、中間歯車4と同様に、磁性を備えていない合成樹脂からなり、中間歯車4の第2の歯車4bと噛み合う。出力歯車5には、回転中心となる出力軸6が設けられている。
また、図2中、出力歯車5の下側の面には、ストッパ手段15を構成する第1の突起部15aが一体に設けられている。この第1の突起部15aは、後述する、ケース部材12に設けた第2の突起部15bと当接し、出力歯車5の回転を所定の位置で止めるものである。
本実施形態では、中間歯車4、出力歯車5は、ロータ磁石2の回転を減速させて伝達するものである。
励磁コイル9は、銅などの導電性を有する金属線を、合成樹脂からなるボビン9aに巻き付けて形成したものである。励磁コイル9は、ボビン9aに設けた端子9bを介して、制御手段に接続されている。
ボビン9aは、断面形状が長方形の貫通孔を備えた筒体である。そして、励磁コイル9は、ロータ磁石2の周囲に配置され、ボビン9aの前記貫通孔内に、ロータ磁石2の一部が入り込んだ状態で、ロータ磁石2の円盤面の一部と前記貫通孔の内周面が対向している。
そして、2つの励磁コイル9には、図示しない制御手段から出力される駆動波形が、それぞれ入力されることによって、ロータ磁石2に回転磁界が発生し、ロータ磁石2に回転力を与えるものである。
ケース部材12は、磁性を備えていない合成樹脂からなり、上下に分割されている。各ケース部材12に設けた係止爪12aを引っ掛けることで、上下に分割したケース部材12を固定している。このケース部材12には、出力歯車5に設けた第1の突起部15aに当接する第2の突起部15bが一体に設けられている。ケース部材12は、第1の回転軸10、第2の回転軸11及び出力軸6を回転可能に支持している。
図4は、ステッピングモータ1を計器装置Mに用いたものである。本実施形態の計器装置Mは、車両の速度を指針14を用いて表示するものである。
指針14は、出力軸6に装着されるものである。この指針14の背後には、指針14が指示する目盛や文字などの指標部17aを備えた表示板17が設けられている。指針14は、ステッピングモータ1に設けたストッパ手段15によって、所定の位置、本実施形態では、車速の「0」を示す位置に留められている。
図5は、ストッパ手段15を構成する第1の突起部15aと第2の突起部1bとが当接することによって、指針14が所定の位置に当接している状態である。
ロータ磁石3には、4つの磁極が設けられている。図5中では、各磁極の境界線Bを点線で示してある。この境界線Bと境界線Bとの間が、各磁極のピーク位置である。図5中では、ロータ磁石3の左上と右下がN極で、左下と右上がS極である。
本実施形態では、ストッパ手段15の第1の突起部15aを第2の突起部15bに押しつけた当接状態を維持するために、第2の回転軸11がロータ磁石2の図5中の右下のN極を図5中の矢印R1方向に引きつけている。そして、第1の回転軸10と第2の回転軸11とを結ぶ直線S1に対して、第2の回転軸11に引きつけられているロータ磁石2の右下のN極のピーク位置のなす角度rは、指針14が所定の位置(ストッパ手段15の当接位置)から離れる方向(矢印R1と逆方向)に、45度以内の位置に配置されている。この45度という角度は、ロータ磁石2の磁極数をn(nは整数)とすると、(360/2n)で求められる角度である。本実施形態では、nは4となるので、360/2・4という式となり、45度が求められる。第2の回転軸11に引きつけられる磁極のピーク位置を前記の式で求められる値としたことで、第1の突起部15aを第2の突起部15bに押しつける方向に回転力が与えられているため、指針14を確実に所定の位置に留めておくことができる。
なお、本実施形態では、第2の回転軸11を磁性部材から形成したが、本実施形態に限定されるものではなく、出力軸6を磁性部材から形成してもよい。この場合も、前記実施形態と同様の作用効果を得ることができる。
また、本実施形態では、ストッパ手段15が、出力歯車5に設けた第1の突起部15aとケース部材12に設けた第2の突起部15bであったが、本実施形態に限定されるものではなく、表示板17に指針14が当接する突起部を設けたものであってもよい。このように構成したことによって、前記突起部によって定められる所定の位置の精度を容易に向上させることができる。
本発明は、ステッピングモータ及びそのステッピングモータを用いた計器装置への利用が可能である。
Claims (5)
- 多極着磁されたロータ磁石と、前記ロータ磁石に同軸上に設けられ前記ロータ磁石の回転に伴って回転するロータ歯車と、前記ロータ歯車と噛み合う第1の歯車とこの第1の歯車と同軸上に設けられた第2の歯車とを有する中間歯車と、前記中間歯車の前記第2の歯車と噛み合う出力歯車と、前記ロータ磁石の周囲に配置され制御手段から出力される駆動波形を入力されることによって回転磁界を発生して前記ロータ磁石に回転力を与える励磁コイルと、前記ロータ磁石の回転中心となる第1の回転軸と、前記中間歯車の回転中心となる第2の回転軸と、前記出力歯車の回転中心となる出力軸と、を有するステッピングモータにおいて、前記第2の回転軸または出力軸は磁性部材からなり、前記励磁コイルに前記回転磁界が発生していない際に、前記ロータ磁石と引き合うことによって、前記出力軸を所定の位置に留めておくことを特徴とするステッピングモータ。
- 多極着磁されたロータ磁石と、前記ロータ磁石に同軸上に設けられ前記ロータ磁石の回転に伴って回転するロータ歯車と、前記ロータ歯車と噛み合う第1の歯車とこの第1の歯車と同軸上に設けられた第2の歯車とを有する中間歯車と、前記中間歯車の前記第2の歯車と噛み合う出力歯車と、前記ロータ磁石の周囲に配置され制御手段から出力される駆動波形を入力されることによって回転磁界を発生して前記ロータ磁石に回転力を与える励磁コイルと、前記ロータ磁石の回転中心となる第1の回転軸と、前記中間歯車の回転中心となる第2の回転軸と、前記出力歯車の回転中心となる出力軸と、を有するステッピングモータを用いた計器装置であって、前記出力軸に装着される指針と、前記指針の背後に配設される表示板と、前記指針を前記表示板の所定の位置に留めるストッパ手段とを備え、前記第2の回転軸または出力軸は磁性部材からなり、前記励磁コイルに前記回転磁界が発生していない際に、前記ロータ磁石と引き合うことによって、前記指針を前記ストッパ手段によって定められる前記所定の位置に留めておくことを特徴とするステッピングモータを用いた計器装置。
- 少なくとも前記出力軸を収容するケース部材を設け、前記ストッパ手段は、前記出力歯車に設けた第1の突起部と、前記ケース部材に設けた第2の突起部とから構成されることを特徴とする請求項2に記載のステッピングモータを用いた計器装置。
- 前記ストッパ手段は、前記表示板に設けられた突起部からなることを特徴とする請求項2に記載のステッピングモータを用いた計器装置。
- 前記指針が前記所定の位置に当接している状態において、前記第2の回転軸または出力軸と引き合っている前記ロータ磁石の磁極ピーク位置は、第1の回転軸と第2の回転軸または出力軸とを結ぶ直線に対して、前記指針が前記所定の位置から離れる方向に、前記ロータ磁石の磁極数をn(nは整数)とすると、(360/2n)度以内の角度に設けられていることを特徴とする請求項3、4に記載のステッピングモータを用いた計器装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007-339111 | 2007-12-28 | ||
| JP2007339111A JP5158345B2 (ja) | 2007-12-28 | 2007-12-28 | ステッピングモータを用いた計器装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2009084344A1 true WO2009084344A1 (ja) | 2009-07-09 |
Family
ID=40824067
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2008/071272 WO2009084344A1 (ja) | 2007-12-28 | 2008-11-24 | ステッピングモータ及びそのステッピングモータを用いた計器装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5158345B2 (ja) |
| WO (1) | WO2009084344A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130160582A1 (en) * | 2010-09-15 | 2013-06-27 | Nippon Seiki Co., Ltd. | Instrument driving device |
| EP3223403A4 (en) * | 2014-11-21 | 2018-06-20 | Nidec Sankyo Corporation | Geared motor and pointer display device |
| EP3223401A4 (en) * | 2014-11-21 | 2018-06-20 | Nidec Sankyo Corporation | Geared motor and pointer display device |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6431751B2 (ja) * | 2014-11-21 | 2018-11-28 | 日本電産サンキョー株式会社 | ギアードモータおよび指針式表示装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0557672U (ja) * | 1991-12-28 | 1993-07-30 | 日本精機株式会社 | 交差コイル式計器 |
| JP2001041981A (ja) * | 1999-07-30 | 2001-02-16 | Nippon Seiki Co Ltd | コイル式計器 |
| JP2003214911A (ja) * | 2002-01-17 | 2003-07-30 | Denso Corp | 計 器 |
-
2007
- 2007-12-28 JP JP2007339111A patent/JP5158345B2/ja not_active Expired - Fee Related
-
2008
- 2008-11-24 WO PCT/JP2008/071272 patent/WO2009084344A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0557672U (ja) * | 1991-12-28 | 1993-07-30 | 日本精機株式会社 | 交差コイル式計器 |
| JP2001041981A (ja) * | 1999-07-30 | 2001-02-16 | Nippon Seiki Co Ltd | コイル式計器 |
| JP2003214911A (ja) * | 2002-01-17 | 2003-07-30 | Denso Corp | 計 器 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130160582A1 (en) * | 2010-09-15 | 2013-06-27 | Nippon Seiki Co., Ltd. | Instrument driving device |
| US9074913B2 (en) * | 2010-09-15 | 2015-07-07 | Nippon Seiki Co., Ltd. | Instrument driving device |
| EP3223403A4 (en) * | 2014-11-21 | 2018-06-20 | Nidec Sankyo Corporation | Geared motor and pointer display device |
| EP3223401A4 (en) * | 2014-11-21 | 2018-06-20 | Nidec Sankyo Corporation | Geared motor and pointer display device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5158345B2 (ja) | 2013-03-06 |
| JP2009162489A (ja) | 2009-07-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2982787B2 (ja) | ステッピングモータ式指示計器 | |
| US10331085B2 (en) | Stepping motor and timepiece | |
| JP6140537B2 (ja) | モータ | |
| KR101820552B1 (ko) | 계기용 구동장치 | |
| WO2009084344A1 (ja) | ステッピングモータ及びそのステッピングモータを用いた計器装置 | |
| US7276825B2 (en) | Stepping motor | |
| JP2017022891A (ja) | モータ、モータ装置および指針式表示装置 | |
| JP2012032201A (ja) | 計器用駆動装置 | |
| JP5007936B2 (ja) | 指示計器装置 | |
| JP2008043071A (ja) | ステッピングモータとその製造方法 | |
| CN101167234A (zh) | 步进电动机 | |
| US20030107274A1 (en) | Stepping motor | |
| JP2017022892A (ja) | モータ、モータ装置および指針式表示装置 | |
| JP5233319B2 (ja) | 計器用ステッピングモータ | |
| WO2019065014A1 (ja) | 車両用指針計器 | |
| JP2002323350A (ja) | 指針式表示装置 | |
| JP2018057088A (ja) | ステッピングモータおよび自動車 | |
| US20120187781A1 (en) | Motor | |
| JP2014241684A (ja) | モータ | |
| KR100679059B1 (ko) | 계기용 스텝핑 모터의 스테이터 구조 | |
| JP2008043072A (ja) | ステッピングモータとその製造方法 | |
| JPH10282151A (ja) | 交差コイル型指示計器 | |
| JPH09184740A (ja) | ステッピングモータ式指示計器 | |
| JP2001099865A (ja) | 指針駆動装置 | |
| JPH09243666A (ja) | ゲージ用ムーブメント |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 08868699 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 08868699 Country of ref document: EP Kind code of ref document: A1 |