RU2695257C2 - Способ эксплуатации зубной щетки с автоматическим определением угла чистки (варианты) - Google Patents
Способ эксплуатации зубной щетки с автоматическим определением угла чистки (варианты) Download PDFInfo
- Publication number
- RU2695257C2 RU2695257C2 RU2017115656A RU2017115656A RU2695257C2 RU 2695257 C2 RU2695257 C2 RU 2695257C2 RU 2017115656 A RU2017115656 A RU 2017115656A RU 2017115656 A RU2017115656 A RU 2017115656A RU 2695257 C2 RU2695257 C2 RU 2695257C2
- Authority
- RU
- Russia
- Prior art keywords
- toothbrush
- longitudinal axis
- angle
- cleaning
- bristles
- Prior art date
Links
- 238000004140 cleaning Methods 0.000 title claims abstract description 115
- 238000000034 method Methods 0.000 title claims abstract description 19
- 238000001514 detection method Methods 0.000 title description 2
- 230000001680 brushing effect Effects 0.000 claims abstract description 20
- 239000003814 drug Substances 0.000 abstract 1
- 230000000694 effects Effects 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 238000012545 processing Methods 0.000 description 18
- 230000009471 action Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 238000012937 correction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 230000008713 feedback mechanism Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000007790 scraping Methods 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images


Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C17/00—Devices for cleaning, polishing, rinsing or drying teeth, teeth cavities or prostheses; Saliva removers; Dental appliances for receiving spittle
- A61C17/16—Power-driven cleaning or polishing devices
-
- A—HUMAN NECESSITIES
- A46—BRUSHWARE
- A46B—BRUSHES
- A46B15/00—Other brushes; Brushes with additional arrangements
- A46B15/0002—Arrangements for enhancing monitoring or controlling the brushing process
- A46B15/0038—Arrangements for enhancing monitoring or controlling the brushing process with signalling means
- A46B15/004—Arrangements for enhancing monitoring or controlling the brushing process with signalling means with an acoustic signalling means, e.g. noise
-
- A—HUMAN NECESSITIES
- A46—BRUSHWARE
- A46B—BRUSHES
- A46B15/00—Other brushes; Brushes with additional arrangements
- A46B15/0002—Arrangements for enhancing monitoring or controlling the brushing process
- A46B15/0038—Arrangements for enhancing monitoring or controlling the brushing process with signalling means
- A46B15/0044—Arrangements for enhancing monitoring or controlling the brushing process with signalling means with light signalling means
-
- A—HUMAN NECESSITIES
- A46—BRUSHWARE
- A46B—BRUSHES
- A46B15/00—Other brushes; Brushes with additional arrangements
- A46B15/0002—Arrangements for enhancing monitoring or controlling the brushing process
- A46B15/0038—Arrangements for enhancing monitoring or controlling the brushing process with signalling means
- A46B15/0046—Arrangements for enhancing monitoring or controlling the brushing process with signalling means with vibrating signalling means
-
- A—HUMAN NECESSITIES
- A46—BRUSHWARE
- A46B—BRUSHES
- A46B9/00—Arrangements of the bristles in the brush body
- A46B9/02—Position or arrangement of bristles in relation to surface of the brush body, e.g. inclined, in rows, in groups
- A46B9/04—Arranged like in or for toothbrushes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C17/00—Devices for cleaning, polishing, rinsing or drying teeth, teeth cavities or prostheses; Saliva removers; Dental appliances for receiving spittle
- A61C17/16—Power-driven cleaning or polishing devices
- A61C17/22—Power-driven cleaning or polishing devices with brushes, cushions, cups, or the like
- A61C17/221—Control arrangements therefor
Landscapes
- Health & Medical Sciences (AREA)
- Dentistry (AREA)
- Epidemiology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Brushes (AREA)
Abstract
Группа изобретений включает два варианта способа эксплуатации зубной щетки, относится к области медицинской техники и предназначена для гигиены ротовой полости. В первом варианте способ эксплуатации зубной щетки, имеющей чистящую головку, где указанная зубная щетка образует продольную ось зубной щетки, а чистящая головка имеет щетинки, проходящие вдоль продольной оси щетинок, содержит этапы, на которых: приводят в действие зубную щетку; создают первую и вторую информацию о приложении силы: определяют, является ли имеющийся в настоящее время угол чистки зубной щетки относительно чистящей поверхности в процессе эксплуатации зубной щетки выше или ниже одного или более заданных пороговых значений, посредством сравнения отношения F1/(F1+F2/cosα1) с упомянутыми одним или более заданными пороговыми значениями; и обеспечивают воспринимаемую пользователем обратную связь относительно имеющегося в настоящее время угла чистки зубной щетки. Первая информация указывает первую силу F1, приложенную чистящей головкой к чистящей поверхности под первым углом к продольной оси зубной щетки и продольной оси щетинок. Вторая информацию указывает вторую силу F2, приложенную чистящей головкой к чистящей поверхности под вторым углом к продольной оси зубной щетки и продольной оси щетинок, при этом второй угол отличается от первого угла. Каждая из множества щетинок проходит в направлении, по существу перпендикулярном продольной оси зубной щетки, и первая сила направлена по существу перпендикулярно продольной оси зубной щетки и по существу параллельно продольной оси щетинок. Вторая сила направлена по существу перпендикулярно продольной оси щетинок и расположена под углом α1, который по существу не перпендикулярен указанной продольной оси зубной щетки. По второму варианту вторая сила направлена по существу неперпендикулярно продольной оси щетинок и расположена под углом α2, который по существу перпендикулярен указанной продольной оси зубной щетки. Изобретения позволяют расширить арсенал технических средств, повышающих эффективность качества чистки зубов. 2 н.п. ф-лы, 5 ил., 4 табл.
Description
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
Настоящее изобретение относится к зубным щеткам, и, в частности, к зубной щетке, например, электрической зубной щетке, выполненной с возможностью определения угла чистки и предоставления обратной связи пользователю на основании чистящей силы, определенной под множеством углов.
2. Предшествующий уровень техники
В целом, электрические зубные щетки для очистки зубов, в том числе для удаления бляшки, хорошо известны. Обычно электрические зубные щетки основаны на наборе щетинок, прикрепленных к щетиночной установочной пластине, которая, в свою очередь, двигается посредством приводного механизма для чистки поверхностей зубов. Такие зубные щетки, которые основаны на отскребающем действии щетинок для фактической очистки, обычно требуют некоторого количества силы, которая должна быть приложена пользователем к зубам для учета различий в различных формах и межзубных промежутках, и для эффективной очистки зубов.
Правильное положение щетинок зубной щетки относительно зубов является определяющим для эффективного удаления бляшки. Для наилучшего удаления бляшки с зубов часто предпочтительно чистить так, чтобы щетинки располагались под углом, близким к перпендикуляру к зубам. Испытания показали, что пользователи обычно чистят зубы под углом, далеким от перпендикулярного. Углы до 70 градусов от перпендикулярного являются обычными, особенно при чистке обращенной внутрь поверхности зубов. При таких чрезмерных углах многие щетинки уже не находятся в контакте с зубами (или расположены под неэффективным углом), и чистка является чрезвычайно неэффективной.
WO 02/15742 раскрывает трехточечную воспринимающую силу систему, которая включает в себя три расположенных на расстоянии друг от друга чувствительных элемента, которые изменяют сопротивление линейно или монотонно в пределах выбранного диапазона приложенной к нему силы.
US 6,536,068 раскрывает способ мониторинга техники чистки зубов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном варианте осуществления обеспечивается зубная щетка, которая включает в себя чистящую головку, первый датчик силы для измерения первой силы, приложенной чистящей головке под первым углом к зубу, и второй датчик силы для измерения второй силы, приложенной чистящей головкой под вторым углом к зубу, при этом второй угол отличается от первого угла, и блок обработки данных. Блок обработки данных выполнен с возможностью: (i) приема первой информации, указывающей первую силу, измеренную первым датчиком силы, (ii) приема второй информации, указывающей вторую силу, измеренную вторым датчиком силы, и (iii) определения информации, касающейся имеющегося в настоящий момент угла чистки чистящей головки, на основании первой информации и второй информации.
В другом варианте осуществления обеспечивается способ работы зубной щетки, имеющей чистящую головку. Способ включает в себя этапы, на которых создают первую информацию, указывающую первую силу, приложенную чистящей головкой к зубам под первым углом, и вторую информацию, указывающую вторую силу, приложенную к зубам чистящей головкой под вторым углом, при этом второй угол отличается от первого угла, определяют информацию, касающуюся имеющегося в настоящий момент угла чистки чистящей головки на основании первой информации и второй информации, и предоставляют воспринимаемую пользователем обратную связь на основании определенной информации, касающейся имеющегося в настоящий момент угла чистки.
Эти и другие цели, признаки и характеристики настоящего изобретения, а также способы работы и функции связанных элементов конструкции и сочетание частей и экономические показатели производства станут более очевидны при рассмотрении нижеприведенного описания и приложенной формулы со ссылкой на сопроводительные чертежи, образующие часть настоящего описания, при этом подобные номера ссылочных позиций обозначают соответствующие части на различных чертежах. Однако следует ясно понимать, что чертежи приведены только с целью иллюстрации и описания, и не предназначены для ограничения изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - схематическое покомпонентное изображение зубной щетки согласно примерному варианту осуществления настоящего изобретения;
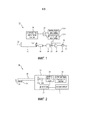
Фиг.2 - принципиальная схема зубной щетки, изображенной на фиг.1;
Фиг.3 и 4 - принципиальные схемы, иллюстрирующие два альтернативных частных варианты осуществления головки зубной щетки, представленной на фиг.1 и 2; и
Фиг.5 - блок-схема, иллюстрирующая работу зубной щетки, представленной на фиг.1 и 2, согласно одному примерному варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
При использовании в настоящем документе единственное число включает в себя множественное, если только иное явно не следует из контекста. При использовании в настоящем документе утверждение, что две или более части или компонента “связаны” означает, что части соединены или работают вместе непосредственно или опосредовано, то есть посредством одной или более промежуточных частей или компонентов, при условии, что существует соединение. При использовании в настоящем документе “непосредственно соединенный” означает, что два элемента находятся в непосредственном контакте друг с другом. При использовании в настоящем документе “жестко соединенный” или “неподвижный” означает, что два компонента соединены так, чтобы двигаться как один, при этом сохраняя постоянную ориентацию друг относительно друга.
При использовании в настоящем документе слово “единый” означает компонент, созданный как единый элемент или блок. То есть компонент, который включает в себя элементы, созданные отдельно и затем соединенные вместе в виде блока, не является “единым” компонентом или телом. При использовании в настоящем документе утверждение, что две или более частей или компонентов “зацепляют” друг друга означает, что части прикладывают силу друг к другу или непосредственно или через одну или более промежуточных частей или компонентов. При использовании в настоящем документе термин “число” означает единицу или целое больше единицы (то есть множество).
При использовании в настоящем документе термин “по существу перпендикулярно” означает - под углом 90 градусов ± 5 градусов.
При использовании в настоящем документе термин “по существу параллельно” означает - под углом 0 градусов ± 5 градусов.
Фразы, относящиеся к направлению, используемые в настоящем документе, например, и без ограничения, вверх, вниз, влево, вправо, верхний, нижний, передний, задний и их производные относятся к ориентации элементов, представленных на чертежах, и не должны ограничивать формулу, если иное специально не указано.
Фиг.1 - схематическое покомпонентное изображение, а фиг.2 - принципиальная схема электрической зубной щетки 10 согласно примерному варианту осуществления настоящего изобретения. Как подробно описано в настоящем документе, зубная щетка 10 выполнена с возможностью обнаружения чистящей силы при множестве углов, которая, в отличие от зубных щеток предшествующего уровня техники, которые могут иметь единственный датчик силы, обеспечивает возможность получения угла чистящей головки, и, таким образом, угла чистки. Зубная щетка 10 включает в себя ручку 12 и двигатель 14 постоянного тока, который питается от аккумулятора 16. Двигатель 14 обеспечивает приведение в действие чистящей головки 18, которая, в свою очередь, съемно установлена на приводном вале 22 двигателя. Однако следует понимать, что в электрических зубных щетках могут использоваться различные альтернативные конструкции приводного действия, которые воплощают концепцию, раскрытую в настоящем документе. Иллюстрация двигателя постоянного тока в примерном варианте осуществления представляет собой только одну из нескольких возможных систем двигателя.
Чистящая головка 18 включает в себя набор щетинок 24, установленных на щетиночной основе 25, которые совместно образуют щетиночный участок чистящей головки 18. Щетинки 24 выполняют очистку посредством колебательного действия, придаваемого чистящей головке 18 двигателем 14. Работа двигателя 14 управляется блоком 26 обработки данных, который представляет собой стандартный компонент электрических зубных щеток. Блок 26 обработки данных может представлять собой, например, и без ограничения, микропроцессор, микроконтроллер или любое другое подходящее устройство обработки, и может включать в себя подходящую память для хранения стандартных программ, выполняемых блоком 26 обработки данных.
Как видно на фиг.1 и 2, в примерном варианте осуществления ручка 12 включает в себя первый датчик 30A силы для измерения чистящей силы, приложенной чистящей головкой 18 к зубам при использовании зубной щетки 10 под первым углом к продольной оси 32 зубной щетки 10 и продольной оси 36 щетинок 24 (как указано стрелкой на фиг.2), и второй датчик 30B силы для измерения чистящей силы, приложенной чистящей головкой 18 к зубам при использовании зубной щетки 10 под вторым углом к продольной оси 32 зубной щетки 10 и продольной оси 36 щетинок 24 (отличной от первой оси). В примерном варианте осуществления первый датчик 30A силы и второй датчик 30B силы расположены вблизи двигателя 14 и выполнены с возможностью измерения силы на приводном валу 22. Таким образом, первый датчик 30A силы и второй датчик 30B силы выполнены с возможностью и расположены так, чтобы измерять чистящие силы под двумя различными углами. Например, первый датчик 30A силы может быть выполнен с возможностью и расположен так, чтобы измерять чистящую силу под углом, по существу перпендикулярным продольной оси 32 зубной щетки 10 и по существу параллельным продольной оси 36 щетинок 24, а второй датчик 30B силы может быть выполнен с возможностью и расположен так, чтобы измерять чистящую силу под углом, по существу параллельным продольной оси 32 и по существу перпендикулярным продольной оси 36 щетинок 24. Однако следует принять во внимание, что эта конфигурация является только примерной, и что также возможны альтернативные углы для каждого датчика 30A и 30B силы в пределах объема концепции, раскрытой в настоящем документе. Множество примерных альтернативных конфигураций для датчиков 30A и 30B силы подробно описаны в других местах в настоящем документе. Кроме того, как видно на фиг.1 и 2, каждый - и первый датчик 30A силы, и второй датчик 30B силы - функционально соединен с блоком 26 обработки данных и предоставляет сигнал блоку 26 обработки данных, указывающий силы, измеренные таким образом. В альтернативном варианте осуществления датчики 30A и 30B силы могут располагаться в чистящей головке 18. Однако, как следует принять во внимание, первая конфигурация, в которой датчики 30A и 30B силы расположены в ручке 12, способствуют поддержанию низкой стоимости чистящей головки 18 и не допускают проблем с соединением между чистящей головкой 18 и ручкой 12.
Первый датчик 30A силы и второй датчик 30B силы может представлять собой любое из множества известных или разработанных в будущем подходящих чувствительных устройств для восприятия силы, приложенной чистящей головкой 18. например, и без ограничения, каждый - и первый датчик 30A силы, и второй датчик 30B силы - могут представлять собой датчик деформации, выполненный с возможностью непосредственного измерения чистящей силы, или датчик, например, магнитный датчик (Холла), который косвенным образом измеряет чистящую силу посредством измерения смещения чистящей головки 18 и/или приводного вала 22 двигателя.
Измеренные значения силы, определенные первым датчиком 30A силы и вторым датчиком 30B силы, предоставляются блоку 26 обработки данных. Кроме того, как видно на фиг.1 и 2, ручка 12 также включает в себя устройство 34 обратной связи, соединенное с блоком 26 обработки данных. Как более подробно описано ниже в настоящем документе, при использовании зубной щетки 10 устройство 34 обратной связи выполнено с возможностью обеспечения воспринимаемой пользователем обратной связи, касающейся угла чистки относительно зубных поверхностей (то есть угла чистки, под которым расположены щетинки 24), который пользователь использует в любое конкретное время. Воспринимаемая пользователем обратная связь, созданная устройством 34 обратной связи, выполнена с возможностью побуждения пользователя к чистке с благоприятным углом чистки. Множество способов, при которых угол чистки и или обратная связь может определяться и/или обеспечиваться, подробно описано в настоящем документе. Устройство 34 обратной связи может представлять собой звуковое устройство обратной связи, например, динамик, выполненный с возможностью генерирования звукового сигнала обратной связи под управлением блока 26 обработки данных. Альтернативно, устройство 34 обратной связи может представлять собой визуальное устройство обратной связи, например, один или более светодиодов, который/которые выполнены с возможностью генерировать визуальный сигнал обратной связи под управлением блока 26 обработки данных. В еще одном альтернативном варианте осуществления обратная связь может выполняться блоком 26 обработки данных, изменяющим режим привода двигателя 14 для обеспечения различных ощущений в полости рта пользователя, например, уменьшенная амплитуда, пульсация двигателя 14 или некоторое другое изменение вибрации двигателя. Такой механизм обратной связи может легче восприниматься пользователем.
Фиг.5 - блок-схема, иллюстрирующая способ работы зубной щетки 10 согласно примерному варианту осуществления раскрытой концепции, при этом определение имеющегося в настоящий момент угла чистки выполняется/получается на основании чистящих сил, которые измеряются под двумя или более различными углами, и в ответ на это, обеспечивается обратная связь пользователю зубной щетки 10 для побуждения его к предпочтительному углу чистки. Способ начинается этапом 40, при этом первая чистящая сила измеряется под первым углом первым датчиком 30A силы (называемая в настоящем документе F1). Затем, на этапе 42 вторая чистящая сила измеряется под вторым углом, отличным от первого угла, вторым датчиком 30B силы (называемая в настоящем документе F2). Первая и вторая чистящие силы, измеренные на этапе 40 и 42, предоставляются блоку 26 обработки данных. Затем, на этапе 44 блок 26 обработки данных выполняет определение, касающееся имеющегося в настоящий момент угла чистки, на основании первой и второй чистящих сил, измеренных на этапах 40 и 42. В примерном варианте осуществления определение, выполненное на этапе 44, представляет собой определение, в какой степени угол чистки отличается от по существу перпендикулярного поверхности зубов (то есть, степень поворота чистящей головки 18 и, в частности, щетинок 24 и щетиночной основы 25, вокруг продольной оси 32 при чистке). Например, и без ограничения, этап 44 может включать в себя этап, на котором определяют, на основании первой и второй чистящих сил, находится ли угол чистки в идеальном диапазоне, неидеальном, но еще допустимом диапазоне, или в недопустимом диапазоне. В качестве другого, более простого, примера, этап 44 может включать в себя определение, является ли угол чистки выше или ниже подходящего заданного порогового значения для допустимого угла. Другие примеры находятся в пределах раскрытой концепции. И, наконец, на этапе 46 блок 26 обработки данных вызывает генерирование воспринимаемой пользователем обратной связи посредством устройства 34 обратной связи на основании определения, выполненного на этапе 44. например, и без ограничения, воспринимаемая пользователем обратная связь может заставить загореться светодиод или светодиоды определенного цвета, образующие часть устройства 34 обратной связи, и/или может вызвать генерирование звукового сигнала определенного характера устройством 34 обратной связи (например, может генерироваться зуммерный сигнал в случае, когда определяется, что угол чистки находится в недопустимом диапазоне значений и/или ниже подходящего заданного порогового значения).
Далее подробно описано множество неограничивающих примерных вариантов осуществления способа, представленного на фиг.5. Следует понимать, однако, что описанные ниже варианты осуществления подразумеваются лишь примерными и, таким образом, не должны рассматриваться как ограничивающие.
В первом примерном варианте осуществления первый датчик 30A силы выполнен с возможностью измерения силы F1 под первым углом, который по существу перпендикулярен продольной оси 32 и по существу параллелен продольной оси 36 щетинок 24, а второй датчик 30B силы выполнен с возможностью измерения силы F2 под вторым углом, который по существу параллелен продольной оси 32 и по существу перпендикулярен продольной оси 36 щетинок 24. В этом примерном варианте осуществления определение, касающееся имеющегося в настоящий момент угла чистки, может быть выполнено путем анализа случая, представленного ниже в Таблице 1, при этом FT представляет собой обычную чистящую силу пользователя, равную, например, и без ограничения, 1-3Н
| Рассматриваемый случай | Значение F1 | Значение F2 | Определение, касающееся имеющегося в настоящий момент угла чистки |
| Случай 1 | FT | 0 | Чистка происходит перпендикулярно зубной поверхности - идеальная чистка |
| Случай 2 | ~ FT | > 0 | Чистка происходит неперпендикулярно зубной поверхности - неидеальная, но все еще допустимая чистка |
| Случай 3 | < FT | >> 0 | Чистка происходит неперпендикулярно зубной поверхности - менее, чем допустимая (то есть, неэффективная) чистка |
| Случай 4 | << FT | F2 >>>0 | Чистка происходит под очень большим углом к зубной поверхности - очень неэффективная чистка |
ТАБЛИЦА 1
На основании описанного выше анализа случаев, если блок 26 обработки данных определяет, что происходящая в настоящий момент чистка, выполняемая пользователем, подпадает под Случай 3 или Случай 4, и, таким образом, угол чистки является неблагоприятным и/или недопустимым, тогда блок 26 обработки данных в примерном варианте осуществления приводит к предоставлению устройством 34 обратной связи корректирующего сигнала пользователю, например, звукового предупреждающего сигнала и/или света определенного цвета, для побудить пользователя к чистке под лучшим углом.
В описанном выше анализе случаев предлагаемая характеристическая величина представляет собой отношение измеренных сил F1/(F1+F2). Таким образом, описанный выше анализ случая может, в одном частном варианте осуществления, быть реализован на основании информации/формул, представленных ниже в ТАБЛИЦЕ 2.
| Отношение F1/ (F1+F2) | Определение, касающееся имеющегося в настоящий момент угла чистки |
| F1/(F1+F2) > Пороговое значение1 | Идеальная чистка (горит зеленый светодиод) |
| Пороговое значение2 ≤ F1/(F1+F2) ≤ Пороговое значение1 | неидеальная чистка (горит оранжевый светодиод) |
| F1/(F1+F2) < Пороговое значение2 | плохая чистка (горит красный светодиод) |
ТАБЛИЦА 2
В одном частном неограничивающем варианте осуществления пороговое значение1 = 0,8, а пороговое значение2 = 0,5. В упрощенном примере описанный выше анализ случаев может выполняться на основании и посредством использования следующей формулы обратной связи: если F1/(F1+F2) < пороговое значение3: плохая чистка (горит красная светодиод и/или активируется зуммерный звуковой сигнал); а в противном случае угол чистки является допустимым. В одном частном неограничивающем варианте осуществления пороговое значение3 = 0,65.
Во втором примерном варианте осуществления зубной щетки 10, схематически представленном на фиг.3, первый датчик 30A силы выполнен с возможностью измерения силы F1 под первым углом, по существу перпендикулярным продольной оси 32 и по существу параллельным продольной оси 36 щетинок 24, а второй датчик 30B силы выполнен с возможностью измерения силы F2 под вторым углом, по существу перпендикулярным продольной оси 36 щетинок 24 и который находится под углом α1, по существу неперпендикулярным продольной оси 32 (как продемонстрировано на фиг.3). В этом втором альтернативном примерном варианте осуществления применяется коэффициент ослабления, равный примерно косинусу α1 и описанный в настоящем документе анализ случаев может быть реализован на основании информации/формул, приведенных ниже в ТАБЛИЦЕ 3.
| Отношение F1/(F1+F2/cosα1) | Определение, касающееся имеющегося в настоящий момент угла чистки |
| F1/(F1+F2/cosα1) > Пороговое значение1 | идеальная чистка (горит зеленый светодиод) |
| Пороговое значение2 ≤ F1/(F1+F2/cosα1) ≤ Пороговое значение1 | неидеальная чистка (горит оранжевый светодиод) |
| F1/(F1+F2/cosα1) < Пороговое значение2 | Плохая чистка (горит красный светодиод) |
ТАБЛИЦА 3
В упрощенном примере анализ случаев в этом альтернативном варианте может выполняться на основании и с использованием следующей единственной формулы обратной связи: если F1/(F1+F2/cosα1) < Пороговое значение3: плохая чистка (горит красный светодиод и/или активируется зумме5рный звуковой сигнал); в противном случае угол чистки является допустимым.
В третьем примерном варианте осуществления зубной щетки 10, представленном схематически на фиг.4, первый датчик 30A силы выполнен с возможностью измерения силы F1 под первым углом, по существу перпендикулярным продольной оси 32 и по существу параллельным продольной оси 36 щетинок 24, а второй датчик 30B силы выполнен с возможностью измерения силы F2 под вторым углом, то есть под углом α2, по существу неперпендикулярным продольной оси 36 щетинок 24 и по существу перпендикулярным продольной оси 32 (как продемонстрировано на фиг.4). В этом третьем примерном варианте осуществления применяется коэффициент ослабления, равный приблизительно синусу α2, и описанный выше в настоящем документе анализ случаев может быть реализован на основании информации/формул, приведенных ниже в ТАБЛИЦЕ 4.
| Отношение F1/(F1+F2/sinα1) | Определение, касающееся имеющегося в настоящий момент угла чистки |
| F1/(F1+F2/sinα2) > Пороговое значение1 | идеальная чистка (горит зеленый светодиод) |
| Пороговое значение2 ≤ F1/(F1+F2/sinα2) ≤ Пороговое значение1 |
Неидеальная чистка (горит оранжевый светодиод) |
| F1/(F1+F2/sinα2) < Пороговое значение2 | Плохая чистка (горит красный светодиод) |
ТАБЛИЦА 4
В упрощенном примере анализ случаев в этом альтернативном варианте может быть реализован на основании и с использованием следующей единственной формулы обратной связи: F1/(F1+F2/sinα2) < Пороговое значение3: плохая чистка (горит красный светодиод и/или активируется зуммерный звуковой сигнал); в противном случае угол чистки является допустимым.
В четвертом примерном варианте осуществления и первый датчик 30A силы и второй датчик 30B силы расположены под углами, которые по существу неперпендикулярны продольной оси 36 щетинок 24. В этом случае может быть предпочтительно, если оба - и первый и второй датчики 30A и 30B силы имеют один и тот же угол относительно продольной оси 36 щетинок 24. Сила, измеренная каждым - и первым и вторым датчиками 30A и 30B силы - по существу одинаковая (то есть, нормированный сигнал (F1-F2)/(F1+F2)~0), если пользователь чистит по существу перпендикулярно зубам (идеальный случай), тогда как угол чистки увеличивается (то есть становится менее идеальным), когда абсолютное значение нормированной разности сил (F1-F2)/(F1+F2) между датчиками увеличивается. Таким образом, в этом варианте осуществления может генерироваться обратная связь, которая указывает плохой угол чистки (например, горит красный светодиод и/или активируется зуммерный звуковой сигнал), когда абсолютное значение разности сил (F1-F2) превышает некоторое заданное пороговое значение. В альтернативном варианте осуществления могут обеспечиваться другой сигнал обратной связи (например, горит зеленый светодиод и/или активируется альтернативный, позитивный зуммерный звуковой сигнал), указывающий хороший угол чистки, когда абсолютное значение разности сил (F1-F2)/(F1+F2) меньше или равно заданному пороговому значению. Следует отметить, что в этом случае также могут использоваться многочисленные пороговые значения, при которых, например, может предоставляться зеленая, оранжевая или красная обратная связь.
Кроме того, в только что описанных первом, втором, третьем и четвертом варианты осуществлениях может быть предпочтительно, чтобы соответствующее характеристическое значение оценивалось только тогда, когда абсолютные уровни сил превышают некоторое пороговое значения, например, и без ограничения, 0,25Н. В противном случае обратная связь может предоставляться, когда чистящая головка 18 на самом деле не находится в контакте с зубами.
Кроме того, когда чистящее действие зубной щетки 10 происходит в основном на зубах, показания первого датчика 30A силы и второго датчика 30B силы, как описано в настоящем документе, обеспечивают хорошую индикацию имеющегося в настоящий момент угла чистки. Однако, когда чистящее действие зубной щетки 10 происходит по линии десны, показания первого датчика 30A силы и второго датчика 30B силы могут, тем не менее, ошибочно указывать идеальные углы чистки (например, F1/F2>0,8), поскольку положение зубной щетки 10 на деснах может создавать доминирующий сигнал от первого датчика 30A силы (F1) из-за ориентации десны. Согласно одному примерному, неограничивающему частному варианту осуществления, эта проблема может быть преодолена посредством использования концепции, раскрытой в настоящем документе, в сочетании с концепцией, описанной в WO 2014/097242, названной “Обнаружение бляшки с использованием датчика потока,” принадлежащей правообладателю настоящего изобретения, раскрытие которого включено в настоящий документ посредством ссылки. В частности, WO 2014/097242 описывает систему, в которой сигналы от датчика потока могут использоваться для получения информации, указывающей, что чистящая головка находится на деснах. Посредством использования этой информации обеспечивается более оптимизированная обратная связь об ориентации чистящей головки согласно концепции, раскрытой в настоящем документе. В частности, указание, что чистящая головка 18 располагается на деснах, полученная способом, описанным в WO 2014/097242, может использоваться как проверка для ситуаций, в которых показания первого датчика 30A силы и второго датчика 30B силы указывают идеальные углы чистки, так что, если такие показания указывают идеальные углы чистки, все еще определяется, что чистящая головка 18 находится на деснах, обратная связь, указывающая идеальные углы чистки, не обеспечивается.
Таким образом, зубная щетка 10, представленная на фиг.1 и 2, и способ работы, представленный на фиг.3, обеспечивают систему, в которой пользователи могут автоматически побуждаться к использованию предпочтительных углов чистки для увеличения эффективности чистки.
В формуле любые ссылочные позиции, размещенные в скобках, не следует рассматривать как ограничивающие пункт формулы. Слова “содержащий” или “включающий в себя” не исключают наличия элементов или этапов, отличных от перечисленных в пункте формулы. В пункте формулы, относящемуся к устройству, в котором перечисляется несколько средств, некоторые из этих средств могут быть реализованы посредством одного и того же аппаратного элемента. Слово в единственном числе, обозначающее элемент, не исключает наличия множества таких элементов. В пункте формулы, относящемся к устройству, в котором перечисляется несколько средств, некоторые из этих средств могут быть реализованы посредством одного и того же аппаратного элемента. Из того факта, что некоторые элементы упоминаются во взаимно различных зависимых пунктах формулы, не следует, что эти элементы не могут быть использованы в сочетании.
Хотя изобретение было описано подробно с целью иллюстрации на основании того, что в настоящий момент считается наиболее практичными и предпочтительными вариантами осуществления, следует понимать, что такая подробность выполнена исключительно с этой целью, и что изобретатель не ограничен раскрытыми вариантами осуществления, а, наоборот, предназначено охватывать модификации и конструкционные эквиваленты, которые находятся в пределах смысла и объема приложенной формулы. Например, следует понимать, что настоящее изобретение предусматривает, что, в пределах возможного один или более признаков любого варианта осуществления могут сочетаться с одним или более признаками любого другого варианта осуществления.
Claims (14)
1. Способ эксплуатации зубной щетки, имеющей чистящую головку, где указанная зубная щетка образует продольную ось зубной щетки, а чистящая головка имеет щетинки, проходящие вдоль продольной оси щетинок, при этом способ содержит этапы, на которых:
приводят в действие зубную щетку;
создают первую информацию, указывающую первую силу F1, приложенную чистящей головкой к чистящей поверхности под первым углом к продольной оси зубной щетки и продольной оси щетинок, и вторую информацию, указывающую вторую силу F2, приложенную чистящей головкой к чистящей поверхности под вторым углом к продольной оси зубной щетки и продольной оси щетинок, при этом второй угол отличается от первого угла,
причем каждая из множества щетинок проходит в направлении, по существу перпендикулярном продольной оси зубной щетки, и первая сила направлена по существу перпендикулярно продольной оси зубной щетки и по существу параллельно продольной оси щетинок,
а вторая сила направлена по существу перпендикулярно продольной оси щетинок и расположена под углом α1, который по существу неперпендикулярен указанной продольной оси зубной щетки,
определяют, является ли имеющийся в настоящее время угол чистки зубной щетки относительно чистящей поверхности в процессе эксплуатации зубной щетки выше или ниже одного или более заданных пороговых значений, посредством сравнения отношения F1/(F1+F2/cosα1) с упомянутыми одним или более заданными пороговыми значениями; и
обеспечивают воспринимаемую пользователем обратную связь относительно имеющегося в настоящее время угла чистки зубной щетки.
2. Способ эксплуатации зубной щетки, имеющей чистящую головку, где указанная зубная щетка образует продольную ось зубной щетки, а чистящая головка имеет щетинки, проходящие вдоль продольной оси щетинок, при этом способ содержит этапы, на которых:
приводят в действие зубную щетку;
создают первую информацию, указывающую первую силу F1, приложенную чистящей головкой к чистящей поверхности под первым углом к продольной оси зубной щетки и продольной оси щетинок, и вторую информацию, указывающую вторую силу F2, приложенную чистящей головкой к чистящей поверхности под вторым углом к продольной оси зубной щетки и продольной оси щетинок, при этом второй угол отличается от первого угла,
причем каждая из множества щетинок проходит в направлении, по существу перпендикулярном продольной оси зубной щетки, и первая сила направлена по существу перпендикулярно продольной оси зубной щетки и по существу параллельно продольной оси щетинок,
а вторая сила направлена по существу неперпендикулярно продольной оси щетинок и расположена под углом α2, который по существу перпендикулярен указанной продольной оси зубной щетки;
определяют, является ли имеющийся в настоящее время угол чистки зубной щетки относительно чистящей поверхности в процессе эксплуатации зубной щетки выше или ниже одного или более заданных пороговых значений, посредством сравнения отношения F1/(F1+F2/sinα2) с упомянутыми одним или более заданными пороговыми значениями; и
обеспечивают воспринимаемую пользователем обратную связь относительно имеющегося в настоящее время угла чистки зубной щетки.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462060824P | 2014-10-07 | 2014-10-07 | |
| US62/060,824 | 2014-10-07 | ||
| PCT/IB2015/057613 WO2016055925A1 (en) | 2014-10-07 | 2015-10-05 | Toothbrush with automatic detection of brushing angle |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| RU2017115656A RU2017115656A (ru) | 2018-11-19 |
| RU2017115656A3 RU2017115656A3 (ru) | 2019-01-28 |
| RU2695257C2 true RU2695257C2 (ru) | 2019-07-22 |
Family
ID=54365330
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2017115656A RU2695257C2 (ru) | 2014-10-07 | 2015-10-05 | Способ эксплуатации зубной щетки с автоматическим определением угла чистки (варианты) |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US10105202B2 (ru) |
| EP (2) | EP3583913B1 (ru) |
| JP (1) | JP6508641B2 (ru) |
| CN (1) | CN106794056B (ru) |
| RU (1) | RU2695257C2 (ru) |
| WO (1) | WO2016055925A1 (ru) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3583913B1 (en) | 2014-10-07 | 2022-02-09 | Koninklijke Philips N.V. | Toothbrush with automatic detection of brushing angle |
| WO2016174621A1 (en) * | 2015-04-29 | 2016-11-03 | Koninklijke Philips N.V. | Systems and methods for providing angle guidance for a user operating an oral hygiene device |
| SG11201912247TA (en) * | 2017-07-20 | 2020-01-30 | Procter & Gamble | Comb sensor for measuring combing resistance |
| CN111212585A (zh) * | 2017-10-13 | 2020-05-29 | 皇家飞利浦有限公司 | 具有高压指示器的个人护理设备 |
| ES2802544T3 (es) | 2017-11-02 | 2021-01-20 | Braun Gmbh | Dispositivo de higiene personal |
| EP3479734B1 (en) | 2017-11-02 | 2021-01-13 | Braun GmbH | Personal hygiene device |
| CA3050892C (en) | 2018-08-02 | 2023-04-04 | Ranir, Llc | Pressure sensing system and method for an electric toothbrush |
| US20220304785A1 (en) * | 2019-06-21 | 2022-09-29 | Koninklijke Philips N.V. | System for determining a brushing angle of an oral care device |
| CN113324850A (zh) * | 2021-06-18 | 2021-08-31 | 好维股份有限公司 | 一种测试儿童牙刷的抗弯力的方法 |
| TWI780903B (zh) * | 2021-09-09 | 2022-10-11 | 南開科技大學 | 牙刷監測裝置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5493747A (en) * | 1993-07-27 | 1996-02-27 | Matsushita Electric Works, Ltd. | Electric toothbrush |
| DE19506129A1 (de) * | 1995-02-22 | 1996-08-29 | Gimelli & Co Ag | Zahnbürste |
| WO2002015742A2 (en) * | 2000-08-21 | 2002-02-28 | Koninklijke Philips Electronics N.V. | Three point force sensing system for a toothbrush |
| US6536068B1 (en) * | 1999-12-29 | 2003-03-25 | Gillette Canada Company | Toothbrushing technique monitoring |
| RU2518532C2 (ru) * | 2009-03-17 | 2014-06-10 | Омрон Хэлткэа Ко., Лтд. | Электрическая зубная щетка |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4716614A (en) * | 1985-11-07 | 1988-01-05 | Jones Arthur R | Device for monitoring the process of toothbrushing |
| US6792640B2 (en) * | 2001-06-29 | 2004-09-21 | Homedics, Inc. | Automatic electric toothbrush |
| JP5359210B2 (ja) | 2008-03-14 | 2013-12-04 | オムロンヘルスケア株式会社 | 電動歯ブラシ |
| BR112012014418B1 (pt) | 2009-12-17 | 2020-01-21 | Unilever Nv | sistema de monitoração de escovação dentária |
| US20130000670A1 (en) | 2011-06-28 | 2013-01-03 | Curt Binner | Toothbrush for providing substantially instant feedback |
| US10524890B2 (en) * | 2012-08-31 | 2020-01-07 | Koninklijke Philips N.V. | Force sensor providing continuous feedback for a resonant drive toothbrush using a hall sensor |
| RU2015129790A (ru) | 2012-12-21 | 2017-01-30 | Конинклейке Филипс Н.В. | Определение десен в устройстве определения гигиены зубов посредством блокирования потокового зонда |
| RU2657956C2 (ru) * | 2012-12-28 | 2018-06-18 | Конинклейке Филипс Н.В. | Элетрическая зубная щетка с датчиком давления |
| CN105101907B (zh) * | 2013-03-11 | 2018-01-19 | 皇家飞利浦有限公司 | 利用霍尔传感器提供用于谐振驱动牙刷的连续反馈的力传感器 |
| EP3197316B1 (en) * | 2014-09-24 | 2023-06-07 | Koninklijke Philips N.V. | Systems and methods for providing motivation feedback to a user before brushing |
| EP3583913B1 (en) * | 2014-10-07 | 2022-02-09 | Koninklijke Philips N.V. | Toothbrush with automatic detection of brushing angle |
-
2015
- 2015-10-05 EP EP19184938.9A patent/EP3583913B1/en active Active
- 2015-10-05 RU RU2017115656A patent/RU2695257C2/ru active
- 2015-10-05 WO PCT/IB2015/057613 patent/WO2016055925A1/en active Application Filing
- 2015-10-05 CN CN201580054421.5A patent/CN106794056B/zh active Active
- 2015-10-05 EP EP15788206.9A patent/EP3203927B1/en active Active
- 2015-10-05 US US15/517,202 patent/US10105202B2/en active Active
- 2015-10-05 JP JP2017518072A patent/JP6508641B2/ja active Active
-
2018
- 2018-09-19 US US16/135,364 patent/US10980624B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5493747A (en) * | 1993-07-27 | 1996-02-27 | Matsushita Electric Works, Ltd. | Electric toothbrush |
| DE19506129A1 (de) * | 1995-02-22 | 1996-08-29 | Gimelli & Co Ag | Zahnbürste |
| US6536068B1 (en) * | 1999-12-29 | 2003-03-25 | Gillette Canada Company | Toothbrushing technique monitoring |
| WO2002015742A2 (en) * | 2000-08-21 | 2002-02-28 | Koninklijke Philips Electronics N.V. | Three point force sensing system for a toothbrush |
| RU2518532C2 (ru) * | 2009-03-17 | 2014-06-10 | Омрон Хэлткэа Ко., Лтд. | Электрическая зубная щетка |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190015182A1 (en) | 2019-01-17 |
| US20170312062A1 (en) | 2017-11-02 |
| CN106794056B (zh) | 2019-11-29 |
| US10980624B2 (en) | 2021-04-20 |
| EP3203927A1 (en) | 2017-08-16 |
| EP3203927B1 (en) | 2019-12-11 |
| CN106794056A (zh) | 2017-05-31 |
| EP3583913A1 (en) | 2019-12-25 |
| EP3583913B1 (en) | 2022-02-09 |
| US10105202B2 (en) | 2018-10-23 |
| RU2017115656A (ru) | 2018-11-19 |
| JP6508641B2 (ja) | 2019-05-08 |
| WO2016055925A1 (en) | 2016-04-14 |
| JP2017529958A (ja) | 2017-10-12 |
| RU2017115656A3 (ru) | 2019-01-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2695257C2 (ru) | Способ эксплуатации зубной щетки с автоматическим определением угла чистки (варианты) | |
| US9259302B2 (en) | Pressure sensing electric toothbrush | |
| RU2645603C2 (ru) | Обнаружение десны с использованием оптического детектора в устройстве обнаружения зубной гигиены | |
| RU2552992C2 (ru) | Зубная щетка с отслеживанием положения | |
| US10076306B2 (en) | Electric toothbrush with ultrasound sensor | |
| US20130323674A1 (en) | Dental apparatus, image acquisition method, and information processing apparatus | |
| JP2016512598A (ja) | 流体流プローブを用いるプラーク検出 | |
| JP7394622B2 (ja) | 協調型個人ケア装置のためのネットワーク | |
| JP7241015B2 (ja) | パーソナルケア装置の位置特定のための方法およびシステム | |
| JP2010172384A (ja) | 口腔衛生装置 | |
| CN117918983A (zh) | 口腔清洁指示方法、装置、电子设备及存储介质 | |
| WO2016067151A1 (en) | Power toothbrush with automatic setting of force trigger level | |
| CN104273932A (zh) | 智能监护牙刷 | |
| JP6298938B2 (ja) | 歯垢検出機能付き歯ブラシシステム | |
| EP4183366A1 (en) | A system for gum analysis | |
| WO2022023166A3 (de) | Zahnbürstenaufsatz, elektrische versorgungseinheit einer elektrischen zahnbürste, elektrische zahnbürste mit einem zahnbürstenaufsatz, zahnbürste sowie testaufsatz für eine elektrische zahnbürste | |
| WO2023088738A1 (en) | A system and method for gum analysis | |
| JPWO2020040311A1 (ja) | 口腔内清掃用具、及びそれに用いるヘッド部品 |