KR930009310B1 - 의료용 3차원 정위장치 - Google Patents
의료용 3차원 정위장치 Download PDFInfo
- Publication number
- KR930009310B1 KR930009310B1 KR1019900013427A KR900013427A KR930009310B1 KR 930009310 B1 KR930009310 B1 KR 930009310B1 KR 1019900013427 A KR1019900013427 A KR 1019900013427A KR 900013427 A KR900013427 A KR 900013427A KR 930009310 B1 KR930009310 B1 KR 930009310B1
- Authority
- KR
- South Korea
- Prior art keywords
- arm
- medical
- unit
- policy
- parallel link
- Prior art date
Links
- 239000000523 sample Substances 0.000 claims description 10
- 230000003287 optical effect Effects 0.000 claims description 2
- 230000003902 lesion Effects 0.000 description 33
- 238000002595 magnetic resonance imaging Methods 0.000 description 17
- 238000001356 surgical procedure Methods 0.000 description 9
- 238000000034 method Methods 0.000 description 6
- 210000004556 brain Anatomy 0.000 description 5
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 210000001519 tissue Anatomy 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 235000013527 bean curd Nutrition 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 238000007428 craniotomy Methods 0.000 description 2
- 238000003745 diagnosis Methods 0.000 description 2
- 201000010099 disease Diseases 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 230000001537 neural effect Effects 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 230000001954 sterilising effect Effects 0.000 description 2
- 238000004659 sterilization and disinfection Methods 0.000 description 2
- 0 CC(*)C(C)C(C)N Chemical compound CC(*)C(C)C(C)N 0.000 description 1
- 240000000543 Pentas lanceolata Species 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000001574 biopsy Methods 0.000 description 1
- 230000002490 cerebral effect Effects 0.000 description 1
- 238000002591 computed tomography Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 239000003574 free electron Substances 0.000 description 1
- 210000004907 gland Anatomy 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 210000005036 nerve Anatomy 0.000 description 1
- 210000000944 nerve tissue Anatomy 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 210000003625 skull Anatomy 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/11—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis with guides for needles or instruments, e.g. arcuate slides or ball joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Medical Informatics (AREA)
- Engineering & Computer Science (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- High Energy & Nuclear Physics (AREA)
- Optics & Photonics (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
내용 없음.
Description
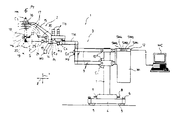
제 1 도는 본 발명의 하나의 실시예에 관한 의료용 3차원 정위장치를 나타낸 전측면도.
제 2 도는 상기 의료용 3차원 정위장치를 나타낸 전체평면도.
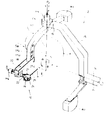
제 3 도는 아암유니트를 나타낸 사시도.
제 4 도는 제 3 도중의 화살표 N방향에서 본 방침부 부근의 사시도.
제 5 도는 원점 및 병소의 위치를 나타낸 환자두부의 분해사시도.
제 6 도는 마아크와 원점의 관계를 나타낸 두부의 분해사시도.
제 7 도는 각도방식에 의하여 병소의 위치를 구하는 경우를 나타낸 두부단면도.
제 8 도는 좌표방식에 의하여 병소의 위치를 구하는 경우를 나타낸 두부단면도.
제 9 도는 본 발명의 다른 실시예를 나타낸 두부단면도이다.
* 도면의 주요부분에 대한 부호의 설명
1 : 의료용 3차원 정위장치 2 : 아암유니트
3 : 지지유니트 9 : 종형평행링크
11a : 제 1 횡형평행링크 11b : 제 2 횡형평행링크
15 : 제 1 아암 17 : 제 2 아암
19 : 방침부 26 : 에코우 프로브(echo probe)
K : 두부 C1-C5: 전자클러치
H1-H6: 로타리엔코더 P1: 제 1 회동축
P2: 제 2 회동축 S : 교점
G : 두부의 원점 T : 병소
N1-M3: 마크(mark) SW1-SW5: 스위치버튼
TS1,TS2: 손잡이스위치버튼 SB : 세트버튼
본 발명의 의료용 3차원 정위(定位)장치, 특히 뇌외과수술에 가장 적합한 의료용 3차원 정위장치에 관한것이다.
종래 CT 스캔이나 MRI 스캔 등의 장치(이하, 단지 CT, MRI라 칭함)의 보급을 계기로 삼아 뇌신경외과는 커다란 전기를 맞이하였다. 즉, 이제까지의 두개(頭蓋)의 단순 촬영이나 뇌혈관 촬영 등의 화상진단법대신 현재까지는 컴퓨터에 의한 해석을 거친 3차원적인 화상진단법이 뇌외과수술의 주체가 되었다.
그렇지만, 이와같은 CT나 MRI를 이용한 화상진단법에 있어서는 타기트(target : 목표)인 병소의 위치를 3차원적으로 얻을 수 있을 뿐이고 그 얻어진 위치정보를 실제로 수술하는 환자의 두부에 재현할 수는 없었다. 역시 CT등의 화상상에서 지정된 임의의 위치를 재현하기 위하여 각종의 CT 유도형 정위 뇌수술장치등도 현재 개발되고 있지만, 재현의 정확성면에서 반드시 만족할 만한 것이 아니었다.
또한, 현재 개발되고 있는 이와같은 각종의 CT유도형 정위 뇌수술장치의 재현성이 만약 정확하였다고 하더라도 개두(開頭)를 수반하는 뇌외고수술의 독자적인 별도의 문제가 남게 된다. 즉, 개두수술을 하는 경우, 만약 타기트인 병소(病巢)의 위치를 환자의 두부(頭部) 표면에서 정확히 측정할 수 있었다고 하더라도바로 그 특정위치를 개두할 수는 없는 경우가 있다. 즉, 개두하고자하는 두개골과 병소의 사이에 닿아서는 않되는 특별 소중한 신경조직이 존재하고 있는 바와같은 경우는, 설사 그 개두 위치가 병소에 대한 최단위치였다고 하더라도 그 위치를 개두할 수는 없으며, 병소로부터의 거리가 가령 멀어졌다고 하더라도 상기한 신경조직과 간섭되지 않는 별도의 위치를 개두하고 그 곳으로부터 병소에 접근치 않으면 안되었다. 그렇지만, 종래의 CT유도형 정위 뇌수술장치 등의 경우는 상기와 같은 접근방향의 변경에 수반하는 조작성이 매우 나쁘고 최적의 개두위치를 찾기 위한 조작이 아주 번잡하였다.
본 발명은 이와같은 종래의 기술에 착안하여 이루어진 것이고, CT나 MRI에 의하여 3차원적으로 포착한 병소의 위치정보를 실제의 수술에 정확히 재현할 수 있음과 동시에 최적의 개두위치를 찾을 때 조작이 간단한 의료용 3차원 정위장치를 제공하고자 하는 것이다.
본 발명에 관한 의료용 3차원 정위장치는, 상기한 목적을 달성하기 위하여 제 1 회동축을 중심으로 하여 회동하는 제 1 아암에 상기 제 1 회동축에 직교하는 제 2 회동축을 중심으로 하여 회동하는 제 2 아암을 갖춤과 동시에 상기 제 2 아암에 상기 제 1 회동축과 동축화할 수 있는 방향성 및 위치를 가짐과 동시에 제 1 회동축 과 제 2 회동축의 교점에 대하여 자유로이 진퇴할 수 있는 방침부(方針部)를 갖춘 아아 지지유니트에 의하여 전후, 좌우, 상하의 임의위치로 이동위치를 자유로이 결정하고 지지함과 동시에 상기 아암유니트에 있어서의 제 1 회동축과 제 2 회동축의 교점의 위치 및 그 교점에 대한 방침부의 선단위치를 각각 위치검출기로 자유로이 검출하게 한 것이다.
보다 구체적으로 설명하면 제 2 아암 및 제 2 아암을 각각 제멋대로 회동시켰다고 하더라도 제 1 회동축과 제 2 회동축의 교점은 움직이지 않고 방침부의 선단도 이 교점을 반드시 지향한다. 따라서, 이암유니트 전체를 지지유니트에 의하여 이동시키고 아암유니트에 있어서의 상기 교점을 환자두부의 병소위치로 위치를 정하면 방침부의 선단은 늘 그 병소를 지향한다. 즉, 방침부를 여하한 위치에 이동시켰다고 하더라도 그 방침부의 선단이 가리키는 방향의 선단에는 병소가 존재하고 있기 때문에 CT나 MRI에 의하여 얻어진 화상사진을 참조하면서 병소에 있어서의 최적의 접근각(개두위치)을 간단히 설정할 수 있다.
또한, 아암유니트에 있어서의 제 1 회동축과 제 2회동축의 교점위치 및 그 교점에 대한 방침부의 선단위치를 각각 위치검출기로 검출하고 있기 때문에, 이 위치검출기에서 얻어진 정보와 CT나 MRI에 의하여 얻어진 병소의 위치정보를 각각 컴퓨터화상 등으로 모니터하면서 합치시키면 CT나 MRI에 의하여 얻어진 3차원적 위치정보를 아암유니트를 개재시켜 실제의 수술에 있어서의 환자의 두부에 정확히 재현할 수 있다. 또한, 방침부 대신 에코우 프로브(echo probe)등을 갖춤으로써 병소의 위치 확인을 실시간(real time)으로 할 수 있다.
본 발명의 이러한 목적과 그 이외의 목적과 이익은 이하의 상세한 설명과 첨부도면에 의하여 가일층 명확하여 질 것이다.
이하, 본 발명에 관한 가장 적합한 실시예를 도면에 의거하여 설명한다.
제 1 도-제 8 도는 본 발명의 하나의 실시예를 나타낸 도면이다.
본 발명에 관한 의료용 3차원 정위장치(1)는 환자의 두부(K)에 대하여 세트하는 아암유니트(2)와 이 아암유니트(2)와 이 아암유니트(2)를 임의위치에 지지하기 위한 지지유니트(3)로 이루어진다. 그리고 이 의료용 3차원 정위장치(1)는 컴퓨터(MC)에 접속하고 있다.
우선, 지지유니트(3)를 먼저 설명한다. 4는 베이스부로서, 캐스터(5)로 이동운반할 수 있음과 동시에 내귀퉁이에 설치한 고정나사(6)에 의하여 마루에 위치를 고정할 수도 있다. 7은 지주로서 상기 베이스부(4)의 중앙에 입설하고 있다. 이 지주(7)는 전후에 갖추어진 페달부(8)를 밟음으로써 베이스부(4)에 대하여 180도의 정확한 반전을 할 수 있다. 그리고 이 지주(7)의 상부에는 전후방향(Z)에 따른 종형평행링크(9)가 지점(10)에 의하여 자유로이 회동되도록 맞붙어 있다. 이 종형평행링크(9)는 지지유니트(3)에 주로 "상하이동기능"을 부여키 위하여 설치되어 있는 것이다. 그리고, 이 종형평행링크(9)의 지주(7)에 대한 상기 지점(10)에는 전자클러치(C1)와 "위치검출기"로서의 로타리엔코더(H1)갖추어져 있고, 종형평행링크(9)의 지주(7)에 대한 외치고정을 전자클러치(C1)로 함과 동시에 이 종형평행링크(9)의 변형에 수반하는 회동량을 로타리엔코더(H1)로 검출할 수 있도록 되어 있다. 이 의료용 3차원 정위장치에서 쓰여지고 있는 전자클러치(C1) 등은 모두 통전시 프리로 되는 것이고 전원을 차단한 경우에만 메이커스프링에 의해 자동적으로 록(rock) 되도록 되어 있다. 따라서, 정전 그밖의 원인에 의하여 전원이 뜻하지 않게 차단되는 바와같은 상황이 되었다고 하더라도 종형평행링크(9)등은 위치고정(록)된 채로의 상태이고 안전상 바람직하다.
이 종형평행링크(9)의 일단에는 이 종형평행링크(9)와 동일방향성 (전후방향 Z)의 제 1 횡형평행링크(11a)가 자유로이 회동되도록 접속되어 있으면 타단에는 계기부(12)를 일부에 갖춘 카운터웨이크(W1)가 접속되어 있다. 이 카운터웨이트(W1)는 종형평행링크(9)에 걸리는 모든 중량과의 밸런스를 유지하고 있다. 따라서, 이 종형평행링크(9)를 변형시키는 경우도 커다란 힘을 요하지 않고 작은 힘으로 용이하게 변형 시킬 수 있다. 그리고, 이 카운터웨이트(W1)의 반대측에 접속되어 있는 상기 제 1 횡평행링크(11a)는 지지유니트(3)를 주로 하여 "좌우이동기능"을 부여하기 위한 것이고 이 제 1 횡평행링크(11a)와 종형평행링크(9)와의 접속점에도 상기와 마찬가지의 전자클러치(C2)와 로타리엔코더(H2)가 갖추어져 있다.
그리고, 이 제 1 횡형평행링크(11a)의 일단에는 그 제 1 횡형평행링크(11a)와 직교하는 방향성(즉, 좌우방향 X)을 가진 제 2 횡평행링크(11b)가 자유로인 회동하도록 접속되어 있다. 이 제 2 횡형평행링크(11b)는 지지유니트(3)에 주로 "전후이동기능"을 부여하기 위한 것이고 이 제 2 횡형평행링크(11b)와 제 1 횡형평행링크(11a)와의 접점에도 상기와 마찬가지의 전자클러치(C3)와 로타리엔코더(H3)가 갖춰져 있다. 그리고, 이 제 2 횡형평행링크(11b)의 일단이 이 지지유니트(3) 전체에 있어서의 선단부(14)로 되는 것이고 이 선단부(14)를 상기 각각 평행링크(9), (11a), (11b)의 변형 상태에 따라 상하, 좌우, 전후의 임의위치에 이동할 수 있도록 한다.
이 지지유니트(3)의 선단부(14)에 갖추어져 있는 것이 아암유니트(2)이다. 이 아암유니트(2)는 상기 선단부(14)에 설정한 수평의 제 1회동축(P1)을 중심으로 자유로이 회동되도록 갖추어져 있는 제 1아암(15)과 그 제 1 아암(15)의 선단(16)에 설정되고, 한편 상기 제 1 회동축(P1)과 직교하는 수직의 제 2 회동축(P2)을 중심으로 하여 자유로이 회동되도록 갖추어져 있는 제 2 아암(17)과 그 제 2 아암(17)의 선단(18)에 갖추어져 상기 제 1 회동축(P1)과 동축화할 수 있는 방향성 및 위치를 가짐과 동시에 제 1 회동축(P1)과 제 2 회동축(P2)과의 교점(S)에 대하여 자유로이 진퇴하는 방침부(19)를 갖추고 있다. 또한, 제 1 아암(15) 및 제 2 아암(17)의 각각의 타단축에는 대소의 카운터웨이트(W2), (W3)가 설치되어 있고 각각 선단측의 중량과의 밸런스가 유지되고 있다. 따라서, 제 1 아암(15) 및 제 2 아암(17)의 회동을 작은 힘으로 회동할 수 있고 어떤 회동위치에서도 정지시킬 수 있다. 또한, 제 1 아암(15) 및 제 2 아암(17)을 각각 회동시킴으로서 제 2 아암(17)의 선단(18)에 설치한 방침부(19)를 교점(S)에 대하여 "구면운동" 시킬 수 있다. 그리고, 제 1 아암(15)의 선단부(14)에 대한 회동지점부분 및 제 2 아암(17)의 제 1 아암(15)에 대한 회동지점부분에도 각각 전자클러치(C4), (C5) 및 로타리엔코더(H4), (H6)가 갖추어져 있고, 제 1 아암(15) 및 제 2 아암(17)의 위치를 고정함과 동시에 제 1, 제 2 아암(15), (17)의 회동방향 θ, 에서의 회동량을 검출할 수 있다.
에서의 회동량을 검출할 수 있다.
제 2 아암(17)의 선단에는 직선상의 랙부(20)가 갖추어져 있으며, 이 랙부(20)에 대하여 자유로이 해체되는 홀더(21)가 계합되어 있고 손잡이부(22)를 회전함으로써 홀더(21)가 랙부(20)의 길이방향을 따라 진퇴하도록 되어 있다. 또한, 이 홀더(21)는 일부(21a)가 힌지(hinge) (23)를 중심으로 하여 열리도록 되어 있으며 이 홀더(21)내에 방침부(19)의 각형동부(24)를 완전하게 위치를 결정한 상태로 세트할 수 있도록 되어있다. 이 각형도부(24)를 홀더(21)내에 세트한 시점에서 각형동부(24)에 갖추어져 있는 방침(25)의 성단(25a)은 상기 제 1 회동축(P1)과 제 2 회동축(P2)과의 교점(S)을 반드시 지향한다. 그리고, 상기 홀더(21)를 진퇴시키는 손잡이부(22)에도 로타리엔코더(H6)가 갖추어져 있으며 방침부(19)의 이동량을 검출하고 상기 제 1 회동축(P1)과 제 2 회동축(P2)과의 교점(S)과의 교점(S)과 방침(25)의 선단(25a) 사이의 거리(1)를 알 수 있도록 되어있다. 전술한 바와같이 홀더(21)가 랙부(20)로부터 자유로이 해체되고, 아울러 방침부(19)가 홀더(21)로부터 자유로이 해체되기 때문에 그들 홀더(31) 및 방침부(19)의 멸균처리를 간단히 할 수 있다.
그리고, 이상 설명한 각 전자클러치(C1-C5) 및 로타리엔코더(H1-H6)는 모두 상기 카운터웨이트(W1)에 구비한 계기부(12)에 접속되어 있다. 이 계기부(12)의 표면에는 상기 제 1 회동축(P1)과 제 2 회동축(P2)의 교점(S) 상하방향(Y)에서의 위치, 좌우 방향(X)에서의 위치, 전후방향(Z)에서의 위치, 교점(S)에 대한 방침(25)의 회동방향(θ)에 있어서의 각도위치, 마찬가지로 회동방향( )에 있어서의 각도위치의 다섯 위치의 데이터에 대응한 스위치버튼(SW1-SW5)이 설치되어 있다. 즉 ,상하방향(Y)에 대응하는 스위치버튼(SW1)은 종형평행링크(9)의 전자클러치(C1)와 접속되고 있으며 이 스위치버튼(SW1)을 눌러 ON 상태로 하였을 때만 전자클러치(C1)는 통전상태(프리 상태)로 될 수 있다. 마찬가지로 스위치버튼(SW2)은 제 1 횡형평행링크(11a)의 전자클러치(C2)와, 수위치버튼(SW3)은 제 2 횡형평행링크(11b)의 전자클러치(C3)와, 스위치번튼(SW4)은 제 1 아암(15)의 전자클러치(C4)와 스위치버튼(SW5)은 제 2 아암(17)의 전자클러치(C5)와 각각 대응하고 있다. 따라서, 예컨대 스위차버튼(SW1)만을 ON으로 하고 그밖의 스위치버튼(SW2-SW5)을 모두 OFF로 하면 스위치버튼(SW1)에 대응하는 종형평행링크(9)의 전자클러치(C1)가 프리로 될 수 있고 다른 전자클러치(C2-C5)는 모두 록(lock)상태로 되기 때문에 아암유니트(2)에 있어서의 교점(S)에 주로 상하이동만을 시킬 수 있다. 이와같이 스위치버튼(SW1-SW5)을 선택적으로 ON-OFF로 함으로써 각평행링크(9), (11a), (11b) 혹은 각 아암(15), 17)중에서 희망하는 것 만을 가동 상태로 하고 기타를 정시상태로 할 수 있다.
)에 있어서의 각도위치의 다섯 위치의 데이터에 대응한 스위치버튼(SW1-SW5)이 설치되어 있다. 즉 ,상하방향(Y)에 대응하는 스위치버튼(SW1)은 종형평행링크(9)의 전자클러치(C1)와 접속되고 있으며 이 스위치버튼(SW1)을 눌러 ON 상태로 하였을 때만 전자클러치(C1)는 통전상태(프리 상태)로 될 수 있다. 마찬가지로 스위치버튼(SW2)은 제 1 횡형평행링크(11a)의 전자클러치(C2)와, 수위치버튼(SW3)은 제 2 횡형평행링크(11b)의 전자클러치(C3)와, 스위치번튼(SW4)은 제 1 아암(15)의 전자클러치(C4)와 스위치버튼(SW5)은 제 2 아암(17)의 전자클러치(C5)와 각각 대응하고 있다. 따라서, 예컨대 스위차버튼(SW1)만을 ON으로 하고 그밖의 스위치버튼(SW2-SW5)을 모두 OFF로 하면 스위치버튼(SW1)에 대응하는 종형평행링크(9)의 전자클러치(C1)가 프리로 될 수 있고 다른 전자클러치(C2-C5)는 모두 록(lock)상태로 되기 때문에 아암유니트(2)에 있어서의 교점(S)에 주로 상하이동만을 시킬 수 있다. 이와같이 스위치버튼(SW1-SW5)을 선택적으로 ON-OFF로 함으로써 각평행링크(9), (11a), (11b) 혹은 각 아암(15), 17)중에서 희망하는 것 만을 가동 상태로 하고 기타를 정시상태로 할 수 있다.
그리고, 또한 제 2 아암(17)의 측면에는 세개의 손잡이스위치버튼(TS1M, TS2)과 하나의 세트버튼(SB)이 설치되어 있다. 이 두개의 손잡이스위치버튼(TS1, TS2)중 손잡이 스위치버튼(TS1)은 상기 지지유니트(3)측에 있어서의 전자클러치(C1-C3)에 대응하는 것이고 손잡이스위치버튼(TS2)은 아암유니트(2) 측에 있어서의 전자클러치(C4) 및 (C5)에 대응하는 것이다. 따라서, 손잡이스위치버튼(TS1)을 ON으로 하면 원칙적으로 지지유니트(3)에 있어서의 모든 전자클러치(C1-C5)가 통전하여 프리로 되고 지지유니트(3)을 이동시킬수 있지만, 다만 계기부(12)에 OFF로 되어 있는 스위치버튼(SW1-SW3)에 해당하는 전자클러치는 예외적으로 통전되지 않는다. 나머지의 손잡이 스위치버튼(TS2)의 기능도 마찬가지로 계기부(12)에서 OFF로 되어 있는 스위치버튼(SW4, SW5)에 해당하는 것을 제외하고는 아암유니트(2)에 있어서의 모든 전자클러치(C4-C5)가 원칙적으로 통전하여 프리로 되도록 되어 있다. 그리고, 세트버트(SB)은 방침(25) 선단(25a)의 위치정보를 입력하기 위한 것이다.
또한, 계기부(12)에는 컴퓨터(MC)가 접속되어 있어며 각 로타리엔코더( H1-H6)로부터의 정보를 해석하여 수치화하고 모니터 화면에 디스플레이할 수 있도록 되어 있다. 또한, 상기 설명한 각 로타리엔코더(H1-H6)는 모두 평행링크(9), (11a), (11b) 등의 회동축에 직결되어 있기 때문에 오차가 적고 정확한 검출을 할 수 있는 것이다.
다음에 이 의료용 3차원 정위장치의 사용방법을 설명한다. 우선, 환자의 두부(K)를 고정지그에 의행 고정하고 두부(K) 표면의 임의위치에 3점의 마아크((M1, M2, M3)를 설정한다. 역시, 이 마아크(M1, M2, M3)는 3점에 한정되는 것이 아니고 경우에 따라서는 4점 이상으로 할 수도 있다. 그리고, 환자에 대해 설정한 이들 3점의 마아크(M1, M2, M3)의 위치에 각각 CT 또는 MRI로 추출되 수 있는 재질제(예컨대, 금속제)의 소구(도시하지 않음)를 하나씩 테이프로 미리 붙여둔다. 그리고, 환자의 두부(K)를 지지의 CT 또는 MRI로 세트하고 두부(K)의 슬라이스화상 사진을 미리 촬영하여 둔다. 이 슬라이스화상 사진을 촬영한 시점에서 3점의 마아크(M1, M2, M3)로부터 두부(K)의 원점(G)의 위치가 결정되고 동시에 이 원점(G)에 대한 병소(T)의 3차원적 위치정보도 계산에 의하여 구하여 진다. 즉, 원점(G)에 대한 병소(T)의 3차원적 좌표위치(x, y, z)나 혹은 원점(G)으로부터의 θ 방향 및 방향에서의 각 각도(θα,
방향에서의 각 각도(θα, α)를 알 수 있다. 원점(G)은 제 5 도와 같이 마아크(M1)와 마아크(M3)를 잇는 선과 나머지의 마아크(M2)를 포함하는 상기한 선의 직교선과의 교점이다.
α)를 알 수 있다. 원점(G)은 제 5 도와 같이 마아크(M1)와 마아크(M3)를 잇는 선과 나머지의 마아크(M2)를 포함하는 상기한 선의 직교선과의 교점이다.
이와같이 하여 CT 또는 MRI 에 의하여 화상사진을 촬영하고, 그리고 원점(G)이 결정되 후에 후자는 3점의 마아크(M1, M2, M3)로부터 금속소구를 벗기고 도시하지 않은 고정지그에 의하여 두부(K)를 고정한 채 수술실로 운반한다. 고정지그에 의하여 두부(K)를 고정되어 있는 것이기 때문에 수평(마루)에 대한 두부(K)의 경사상태는 상기 CT 또는 MRI에 의하여 화상사진을 촬영한 상태와 마찬가지의 상태로 재현되고 있다. 그리고, 환자의 두부( K)를 의료용 3차운 정위장치(1)의 아암유니트(2)에 대하여 적당히 세트한다. 이어서 제 1 아암(15) 및 제 2 아암(17)을 회동시킴으로써, 방침(25)의 선단(25a)을 각 마아크(M1, M2, M3)에 맞추고, 그리고 세트버튼(SB)을 눌러 각 마아크(M1, M2, M3)의 위치를 컴퓨터(MC)에 기억시킨다. 이 경우 환자의 두부(K)는 아암유니트(2)에 대하여 적당한 위치에 세트하고 있을 뿐이므로 방침(25)의 선단(25a)이 지향하고 있는 교점(S)과 상기 마아크(M1, M2, M3)로 부터 구하여지는 원점(G)과는 위치가 서로 다르다(제 6 도 참조). 그리하여 제 2 아암(17)의 측면에 설정되어 있는 손잡이스위치버튼(TS1)을 누르고 지지유니트(3)의 모든 전자클러치(C1-C3)를 프리로 하여 아암유니트(2)를 상하(Y).좌우(X).전후(Z) 방향으로 이동시키고 아암유니트(2)의 교점(S)을 두부(K)의 원점(G)에 합치시킨다.
그리고, 다음에 병소(T)의 위치를 찾는 것이지만, 우선, CT 또는 MRI로 얻어진 원전(G)으로부터의 θ방향 및 방향에서의 각 각도(θα,
방향에서의 각 각도(θα, α)로부터 병서(T)의 위치를 구하는 "각도방식"에 관하여 제 7 도를 이용하여 간단히 설명한다. 즉, 컴퓨터(MC)의 모니터 화면에는 방침(25)의 원점(G)에 대한 θ방향 및
α)로부터 병서(T)의 위치를 구하는 "각도방식"에 관하여 제 7 도를 이용하여 간단히 설명한다. 즉, 컴퓨터(MC)의 모니터 화면에는 방침(25)의 원점(G)에 대한 θ방향 및 방향에서의 각도가 표시되므로 이 표시된 각도를 먼저 CT 또는 MRI로 얻은 θ 방향 및
방향에서의 각도가 표시되므로 이 표시된 각도를 먼저 CT 또는 MRI로 얻은 θ 방향 및 방향에서의 각 각도(θα,
방향에서의 각 각도(θα, α)와 합치시킨다. 그 시점에서 방침(25)이 지향하고 있는 선단에 병소(T)가 존재하도록 한다. 다만, 이 "각도방식"운 병소(T)에 대한 근접각의 변경을 용이하게 할 수 없으므로 다음에 제 8 도를 이용하여 "좌표방식"에 의해 병소(T)를 찾는 방법을 설명한다.
α)와 합치시킨다. 그 시점에서 방침(25)이 지향하고 있는 선단에 병소(T)가 존재하도록 한다. 다만, 이 "각도방식"운 병소(T)에 대한 근접각의 변경을 용이하게 할 수 없으므로 다음에 제 8 도를 이용하여 "좌표방식"에 의해 병소(T)를 찾는 방법을 설명한다.
우선, 아암유니트(2)의 교점(S)을 원점(G)위치에서 두부(K)내의 병소(T)에 이동시켜야할 아암유니트(2) 전체를 지지유니트(3)에 의하여 CT 또는 MRI로부터 얻어진 병소(T)의 3차원 좌표(x, y, z)에 의거하여 이동시킨다. 즉, 손잡이스위치버튼(TS1)을 누르고 지지유니트(3)의 각 전자클러치(C1-C3)를 프리로 하여 컴퓨터(MC)의 모니터 화면상에 표시되어 있는 현재의 교점(S) 위치를 나타내는 3차원 좌표 치수가 CT 또는 MRI로부터 얻어진 병소(T)의 위치를 나타내는 선단의 좌표위치(x, y, z)와 합치될 때까지 지지유니트(3)에 의하여 아암유니트(2) 전체를 이동시킨다.
이와같이 하여 아암유니트(2)의 고점(S)를 병소(T)에 합치시킨 시점에서 방침(25)은 어떠한 근접각을 취하드라도 늘 병소(T) (교점S)를 지향하므로 방침(25)에 따른 방향으로 개두하면 반드시 병소(T)에 도달한다. 또한, 방침(25)의 선단(25a)과 두부(K)와의 위치관계를 나타낸 엔코더(H6)로 부터의 정보에 의하여 두부(K)의 표면으로부터 어느 정도의 깊이 위치에 병소(T)가 위치하고 있는지도 알 수 있다. 이와같은 기능을 구비하고 있음으로써 병소(T)에 대한 수술의 근접각을 임의로, 한편으로는 용이하게 선정할 수 있다. 예컨대, 제 8 도에 도시된 바와같이 부호(A1)로 나타낸 근접각으로 개두하면 병소(T)를 최단거리에 포착할 수 있지만, 그 경우의 개두위치와 병소(T)와의 사이에 소중한 신경조직(E)등이 존재하고 있는 경우 그 신경조직에 상처를 줄 우려가 있으므로, 설사 최단거리일지라도 그곳을 개두하여서는 아니된다. 따라서, 이 근접각(A1) 이외의, 예컨대 근접각(A2) 등에서 개두를 할 필요가 있다. 이와같이 하여 최적의 근접각을 찾는 경우, 먼저 CT 또는 MRI로 촬영하여 둔 두부의 화상사진을 참조하면서 하면 대단히 편리하다. 그리고, 일단 개두위치가 결정되었으면 이 의료용 3차원 정위창치(1)는 불필요하므로 지지유니트(2)의 폐달부(8)를 밟고 지지유니트(3)를 지주(7)를 중심으로 180도 정도 정확하게 반전시킨다. 그리고, 상기 결정된 위치에 대하여 개두수술을 실시한다. 역시, 수술을 일단 개시한 후에 다시한번 병소(T)의 위치를 재확인한다든가 하는 경우에는 다시 페달부(8)를 밟고 180도 회전시켜 아암유니트(2)를 환자의 두부(K)에 다시 세트할 수 있다. 이때의 두부(K)에 대한 아암유니트(2)의 위치는 완전히 원상태로 재현되며 조작이 대단히 용이하다. 따라서, 전회의 데이터에 의거하여 다시 개두위치등의 재확인을 할 수 있다.
역시, 이상의 설명에 있어서 아암유니트(2)의 교점(S)을 일단 두부(K)의 원점(G)에 맞추고 구후 아암유니트(2)의 교점(S)을 병소(T)에 맞추는 예를 나타내었지만 컴퓨터(MC)의 해석에 의해 최초의 교점(S)과 병소(T)의 위치관계를 인식할 수 있으면 교점(S)을 일단 원점(G)에 맞추지 않고 직접 병소(T)에 합치시키도록 하여도 된다.
또한, 제 1 아암(15)을 지지하는 지지유니트(3)는 이 실시예와 같이 종형평행링크(9)와 횡형평행링크(11a), (11b)를 조합시킴으로써 구성하여도 되지만, 기지의 로보트 아암이나 X, Y, Z 방향에 직선적으로 움직이는 이동장치 등을 이용하여도 된다.
또한, "위치검출기"로서 엔코더(H1-H6)를 예로 들었지만, 포텐셔메터(potentiometer) 그 밖의 것도된다.
제 9 도는 본 발명의 다른 실시예를 나타낸 도면이다. 역시, 앞의 실시예와 동일한 부분에는 동일한 부호를 사용하고 중복설명은 생략한다. 이 실시예에서는 앞의 실시예에서 나타낸 제 2 아암(17)의 홀더(21)에 대해 방침부(19) 대신 에코우 프로브(26)를 갖춘 것이다. 이 에코우 프로브(26)의 선단에서는 초음파가 부채꼴의 넓이로 발하여져 초음파를 조사한 부분의 엔코우 화상을 얻을 수 있다. 따라서, 일단 두부(K)를 개두한 후에 이 개두부분(27)에 대하여 에코우 프로브(26)의 선단을 맞춤으로써 개두후에 있어서의 두부의 내압의 변화등에 의하여 만일 병소(T)가 T1에 위치변화를 일으킨 바와같은 경우에도 그 병소(T1)의 위치를 이 에코우 프로브(26)로 확실히 포착하여 고칠 수 있다. 역시, 이상의 설명에 있어서 방침부(19) 대신 에코우 프로브(26)를 갖추는 예를들었지만, 에코우 프로브(26) 외에도 각종 센서나 천두생검(穿頭生檢)이나 정위적인 전극의 깊이 끼움등에 이용할 수 있는 각종 치료기구, 또는 현미경 등의 광학기기등을 부착할 수도 있다.
본 발명에 관한 의료용 3차원 정위장치는 이상 설명하여 온 바와같은 내용의 것으로서, 아암유니트에 있어서의 제 1 회동축과 제 2 회동축의 교점이 움직이지 않기 때문에 방침부의 선단은 이 교점을 반드시 지향한다. 따라서, 아암유니트 전체를 지지유니트에 의하여 이동하고 아암유니트에 있어서의 상기 교점을 환자두부의 병소위치에 위치를 결정시키면 방침부의 선단은 늘 그 병소를 지향기 때문에 이 병소에의 최적의 근접각(개두위치)을 선정할 때의 조작이 대단히 용이하다. 또한 아암유니트에 있어서의 제 1 회동추고가 제 2 회동축의 교점의 위치 및 그 교점에 대한 방침부의 선단위치를 각각 위치검출기로 검출하고 있기 때문에 이 위치검출기로부터의 정보를 수치화하여 컴퓨터화면으로 모니터하고 CT 나 MRI에 의하여 3차원적으로 포착한 타기트(병소)의 위치정보와 합치시킴으로써 그들 CT나 MRI에 의하여 얻어진 3차원 위지 정보를 실제의 수술에 있어서의 환자의 두부에 정확히 재현할 수 있다.
또한, 본 발명의 실시예에 의하면 아래와 같은 각종의 효과가 있다. 지지유니트에 있어서의 종형평행링크나 각 아암의 타단에 카운터웨이트를 각각 설치하였기 때문에 지지유니트나 각 아암은 전체적으로 중량벨런스가 유지되고 각 평행랭크나 아암을 움직이는데 커다란 힘을 요하지 않고 신속하고도 안전한 조작을 할 수 있다. 폐달을 밟는 것 만으로 지지유니트 전체를 180도 정도 정확하게 회동시킬 수 있으므로 근접각을 결정한 후에는 반전하여 수술의 방해가 되지 않도록 하여 둘 수 있으며, 또 지지유니트를 원상태로 되돌릴 때에 아암유니트의 교점위치를 반전 이전의 위치로 완전히 재현할 수 있다.
홀더나 방침부가 자유로이 해체되기 때문에 가스멸균 등이 용이하다.
Claims (4)
- 아암유니트(2)와, 상기 아암유니트(2)를 전후, 좌우, 상하로 이동가능한 지지유니트(3)으로 이루어진 의료용 3차원 정위 장치에 있어서, 상기 아암유니트(2)가, 상기 아암유니트(3)의 선단부(14)에 수평한 제 1 회동축(P1)을 중심으로 하여 자유로이 회동할 수 있도록 설치되고, 동시에 상기 선단부(14)에서 약 1/4원호 정도 연장된 만곡도를 가지는 제 1 아암(15)와, 상기 제 1 아암(15)의 선단부(16)에 상기 제 1 회동축(P1)과 직교하는 제 2 회동축(P2)를 중심으로 자유로이 회동할 수 있도록 설치됨과 동시에, 상기 전단부(16)에서 약 1/4원호 정도 연장된 만곡도를 가지는 제 2 아암(17)과, 제 2 아암(17)의 선단부(18)에 설치되고, 전기 제 1 회동축(P1)과 동축화할 수 있는 방향성 및 위치를 가지고, 동시에 제 1 회동축(P1)과 제 2 회동축(P2)의 교점(S)에 대하여 자유로이 진퇴할 수 있는 방침부(19)와, 상기 교점(S)에 대한 방침부(19)의 선단(25a)의 위치를 검출할 수 있는 엔코더(H1-H6)를 구비함을 특징으로 하는 의료용 3차원 정위 장치.
- 제 1 항에 있어서, 지지유니트(3)가 종형평행링크(9)와 횡형평행링크(11a, 11b)와의 조합인 것을 특징으로 하는 의료용 3차원 정위 장치.
- 제 1 항 또는 제 2 항에 있어서, 방침부(19) 대신 에코우 프로브(echo probe) (26)을 갖춘 의료용 3차원 정위 장치.
- 제 1 항 또는 제 2 항에 있어서, 방침부(19) 대신 각종 센서나 치료기구 또는 광학 기기를 갖춘 의료용 3차원 정위 장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP1242027A JPH03106359A (ja) | 1989-09-20 | 1989-09-20 | 医療用三次元定位装置 |
| JP242027/89 | 1989-09-20 | ||
| JP1-242027 | 1989-09-20 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR910005823A KR910005823A (ko) | 1991-04-27 |
| KR930009310B1 true KR930009310B1 (ko) | 1993-09-27 |
Family
ID=17083182
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1019900013427A KR930009310B1 (ko) | 1989-09-20 | 1990-08-29 | 의료용 3차원 정위장치 |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP0419070B2 (ko) |
| JP (1) | JPH03106359A (ko) |
| KR (1) | KR930009310B1 (ko) |
| CA (1) | CA2024148C (ko) |
| DE (1) | DE69024151T3 (ko) |
| ES (1) | ES2081940T5 (ko) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03114460A (ja) * | 1989-09-29 | 1991-05-15 | Mitaka Koki Kk | 医療用三次元定位装置 |
| JP2648274B2 (ja) * | 1993-01-28 | 1997-08-27 | 三鷹光器株式会社 | 医療用位置検出装置 |
| US5891157A (en) * | 1994-09-30 | 1999-04-06 | Ohio Medical Instrument Company, Inc. | Apparatus for surgical stereotactic procedures |
| CN1903390B (zh) * | 2005-07-29 | 2010-10-06 | 重庆融海超声医学工程研究中心有限公司 | Mri引导的高强度聚焦超声治疗系统 |
| KR100732533B1 (ko) * | 2006-01-04 | 2007-06-27 | 사회복지법인 삼성생명공익재단 | 감마나이프 방사선 수술용 장비에 사용되기에 적합한세포주용 정위기구 |
| JP2006312079A (ja) * | 2006-08-09 | 2006-11-16 | Olympus Corp | 医療用マニピュレータ |
| GB2472066A (en) * | 2009-07-23 | 2011-01-26 | Medi Maton Ltd | Device for manipulating and tracking a guide tube with radiopaque markers |
| KR101646724B1 (ko) * | 2012-11-19 | 2016-08-12 | 알피니언메디칼시스템 주식회사 | 아티큘레이팅 아암 장치 및 그를 포함하는 초음파 의료장치 |
| KR101740699B1 (ko) | 2013-05-24 | 2017-05-26 | 주식회사 고영테크놀러지 | 카운터 밸런스부를 구비한 스탠드 |
| US10353165B2 (en) | 2013-05-24 | 2019-07-16 | Koh Young Technology Inc. | Stand equipped with counterbalance unit |
| KR101861176B1 (ko) | 2016-08-16 | 2018-05-28 | 주식회사 고영테크놀러지 | 정위수술용 수술로봇 및 정위수술용 수술로봇의 제어방법 |
| KR101848027B1 (ko) * | 2016-08-16 | 2018-04-12 | 주식회사 고영테크놀러지 | 정위수술용 수술로봇 시스템 및 정위수술용 로봇의 제어방법 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58118740A (ja) * | 1982-01-08 | 1983-07-14 | アロカ株式会社 | 超音波探触子のスキヤナ |
| JPS62270148A (ja) * | 1986-05-19 | 1987-11-24 | アラン アンジエロ パテイル | コンピユ−タ断層撮影スキヤナ−の利用により、患者の頭骨内部の対象部位に対して外科的処置を行なう装置 |
| DE3723920A1 (de) * | 1987-04-04 | 1989-01-26 | Philips Patentverwaltung | Lithotripsie-arbeitsplatz |
| SE8701719D0 (sv) * | 1987-04-27 | 1987-04-27 | Elekta Instr Ab | Sett att markera ett operationsstelle och anordning for utforande av settet |
| DE3717871C3 (de) * | 1987-05-27 | 1995-05-04 | Georg Prof Dr Schloendorff | Verfahren und Vorrichtung zum reproduzierbaren optischen Darstellen eines chirururgischen Eingriffes |
| JPS63296743A (ja) * | 1987-05-29 | 1988-12-02 | Mitaka Koki Kk | 医療用光学機器のスタンド装置 |
| JPS63296742A (ja) * | 1987-05-29 | 1988-12-02 | Mitaka Koki Kk | 医療用光学機器のスタンド装置 |
-
1989
- 1989-09-20 JP JP1242027A patent/JPH03106359A/ja active Granted
-
1990
- 1990-08-28 CA CA002024148A patent/CA2024148C/en not_active Expired - Fee Related
- 1990-08-29 KR KR1019900013427A patent/KR930009310B1/ko not_active IP Right Cessation
- 1990-08-31 EP EP90309535A patent/EP0419070B2/en not_active Expired - Lifetime
- 1990-08-31 ES ES90309535T patent/ES2081940T5/es not_active Expired - Lifetime
- 1990-08-31 DE DE69024151T patent/DE69024151T3/de not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH03106359A (ja) | 1991-05-02 |
| CA2024148A1 (en) | 1991-03-30 |
| CA2024148C (en) | 1996-09-10 |
| DE69024151T2 (de) | 1996-05-09 |
| ES2081940T5 (es) | 2000-03-01 |
| DE69024151D1 (de) | 1996-01-25 |
| DE69024151T3 (de) | 2000-06-15 |
| EP0419070B1 (en) | 1995-12-13 |
| ES2081940T3 (es) | 1996-03-16 |
| EP0419070B2 (en) | 1999-11-03 |
| JPH0555141B2 (ko) | 1993-08-16 |
| EP0419070A1 (en) | 1991-03-27 |
| KR910005823A (ko) | 1991-04-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5257998A (en) | Medical three-dimensional locating apparatus | |
| US5930329A (en) | Apparatus and method for detection and localization of a biopsy needle or similar surgical tool in a radiographic image | |
| US6055449A (en) | Method for localization of a biopsy needle or similar surgical tool in a radiographic image | |
| EP0919203B1 (en) | Frameless stereotactic surgical apparatus | |
| Li et al. | The application accuracy of the NeuroMate robot—a quantitative comparison with frameless and frame-based surgical localization systems | |
| EP0946886B1 (en) | Apparatus and method for visualizing ultrasonic images | |
| US5957933A (en) | Interchangeable guidance devices for C.T. assisted surgery and method of using same | |
| US6285902B1 (en) | Computer assisted targeting device for use in orthopaedic surgery | |
| US8825135B2 (en) | Radiographic image capturing system and bioptic method using radiographic image capturing system | |
| Krybus et al. | Navigation support for surgery by means of optical position detection | |
| KR930009310B1 (ko) | 의료용 3차원 정위장치 | |
| JPH03168139A (ja) | 対話的イメージガイドの手術システム | |
| JPH11262486A (ja) | 画像生成の方法及び装置 | |
| EP0919202A2 (en) | Frameless stereotactic surgical apparatus | |
| EP1103229A2 (en) | System and method for use with imaging devices to facilitate planning of interventional procedures | |
| US20020151784A1 (en) | Surgical microscope | |
| US20090082784A1 (en) | Interventional medical system | |
| JPH02503519A (ja) | 外科手術を再生可能に光学的に表示するための方法及び装置 | |
| JPS6343103B2 (ko) | ||
| JPH11313837A (ja) | 像誘導式の介在的手順のプランニング方法及び装置 | |
| WO2007082494A1 (en) | Guided puncturing needle and puncturing guiding method | |
| US6249713B1 (en) | Apparatus and method for automatically positioning a biopsy needle | |
| Reinhardt et al. | CT-guided “real time” stereotaxy | |
| US7245958B1 (en) | Trigonometric depth gauge for biopsy needle | |
| JPH0567286B2 (ko) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E902 | Notification of reason for refusal | ||
| G160 | Decision to publish patent application | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 19970813 Year of fee payment: 5 |
|
| LAPS | Lapse due to unpaid annual fee |