KR20230058671A - 지능형 청소 시스템 - Google Patents
지능형 청소 시스템 Download PDFInfo
- Publication number
- KR20230058671A KR20230058671A KR1020237010487A KR20237010487A KR20230058671A KR 20230058671 A KR20230058671 A KR 20230058671A KR 1020237010487 A KR1020237010487 A KR 1020237010487A KR 20237010487 A KR20237010487 A KR 20237010487A KR 20230058671 A KR20230058671 A KR 20230058671A
- Authority
- KR
- South Korea
- Prior art keywords
- dust
- fan
- cleaning
- cleaning robot
- port
- Prior art date
Links
- 238000004140 cleaning Methods 0.000 title claims abstract description 454
- 239000000428 dust Substances 0.000 claims abstract description 882
- 238000000605 extraction Methods 0.000 claims abstract description 236
- 238000007664 blowing Methods 0.000 claims abstract description 45
- 238000000034 method Methods 0.000 claims description 86
- 238000001514 detection method Methods 0.000 claims description 46
- 238000012423 maintenance Methods 0.000 claims description 41
- 230000004308 accommodation Effects 0.000 claims description 20
- 238000012545 processing Methods 0.000 claims description 20
- 230000009471 action Effects 0.000 claims description 13
- 230000001954 sterilising effect Effects 0.000 claims description 13
- 238000004659 sterilization and disinfection Methods 0.000 claims description 13
- 239000003990 capacitor Substances 0.000 description 17
- 230000002093 peripheral effect Effects 0.000 description 12
- 230000002070 germicidal effect Effects 0.000 description 10
- 230000006870 function Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 7
- 241000894006 Bacteria Species 0.000 description 6
- 238000007789 sealing Methods 0.000 description 6
- 230000009286 beneficial effect Effects 0.000 description 5
- 238000011109 contamination Methods 0.000 description 5
- 101000574013 Homo sapiens Pre-mRNA-processing factor 40 homolog A Proteins 0.000 description 4
- 102100025822 Pre-mRNA-processing factor 40 homolog A Human genes 0.000 description 4
- 230000003321 amplification Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 238000003199 nucleic acid amplification method Methods 0.000 description 4
- 238000005070 sampling Methods 0.000 description 4
- 238000013461 design Methods 0.000 description 3
- 238000001914 filtration Methods 0.000 description 3
- 238000010408 sweeping Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 2
- 239000002699 waste material Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 239000013618 particulate matter Substances 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
Images







Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2868—Arrangements for power supply of vacuum cleaners or the accessories thereof
- A47L9/2873—Docking units or charging stations
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4013—Contaminants collecting devices, i.e. hoppers, tanks or the like
- A47L11/4025—Means for emptying
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/10—Filters; Dust separators; Dust removal; Automatic exchange of filters
- A47L9/19—Means for monitoring filtering operation
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
- A47L9/281—Parameters or conditions being sensed the amount or condition of incoming dirt or dust
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2842—Suction motors or blowers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2857—User input or output elements for control, e.g. buttons, switches or displays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2/00—Methods or apparatus for disinfecting or sterilising materials or objects other than foodstuffs or contact lenses; Accessories therefor
- A61L2/02—Methods or apparatus for disinfecting or sterilising materials or objects other than foodstuffs or contact lenses; Accessories therefor using physical phenomena
- A61L2/08—Radiation
- A61L2/10—Ultra-violet radiation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F23/00—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm
- G01F23/14—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm by measurement of pressure
- G01F23/18—Indicating, recording or alarm devices actuated electrically
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/042—Programme control other than numerical control, i.e. in sequence controllers or logic controllers using digital processors
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B21/00—Alarms responsive to a single specified undesired or abnormal condition and not otherwise provided for
- G08B21/18—Status alarms
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/02—Docking stations; Docking operations
- A47L2201/022—Recharging of batteries
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/02—Docking stations; Docking operations
- A47L2201/024—Emptying dust or waste liquid containers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2202/00—Aspects relating to methods or apparatus for disinfecting or sterilising materials or objects
- A61L2202/10—Apparatus features
- A61L2202/14—Means for controlling sterilisation processes, data processing, presentation and storage means, e.g. sensors, controllers, programs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2202/00—Aspects relating to methods or apparatus for disinfecting or sterilising materials or objects
- A61L2202/10—Apparatus features
- A61L2202/16—Mobile applications, e.g. portable devices, trailers, devices mounted on vehicles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2202/00—Aspects relating to methods or apparatus for disinfecting or sterilising materials or objects
- A61L2202/10—Apparatus features
- A61L2202/17—Combination with washing or cleaning means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F23/00—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm
- G01F23/0007—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm for discrete indicating and measuring
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F23/00—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm
- G01F23/0007—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm for discrete indicating and measuring
- G01F23/0015—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm for discrete indicating and measuring with a whistle or other sonorous signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F23/00—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm
- G01F23/80—Arrangements for signal processing
- G01F23/802—Particular electronic circuits for digital processing equipment
- G01F23/804—Particular electronic circuits for digital processing equipment containing circuits handling parameters other than liquid level
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Epidemiology (AREA)
- Emergency Management (AREA)
- Fluid Mechanics (AREA)
- Automation & Control Theory (AREA)
- Robotics (AREA)
- Business, Economics & Management (AREA)
- Electric Vacuum Cleaner (AREA)
- Electric Suction Cleaners (AREA)
- Cleaning In General (AREA)
- Pharmaceuticals Containing Other Organic And Inorganic Compounds (AREA)
- Exchange Systems With Centralized Control (AREA)
- Saccharide Compounds (AREA)
Abstract
본 출원은 로봇 청소기 및 로봇 청소기에 끼워맞춰지는 유지 스테이션을 포함하는, 지능형 청소 시스템에 관한 것이다. 유지 스테이션은 먼지 추출 포트 및 공기 배출 포트가 제공된 제1 하우징; 제1 하우징 상에 배치된 제1 팬으로서, 제1 팬의 공기 배출 단부는 공기 배출 포트 및 먼지 추출 포트와 각각 연통하는 제1 팬; 및 로봇 청소기를 충전하기 위해 제1 하우징 상에 배치된 충전 구성요소를 포함한다. 로봇 청소기는 먼지 흡입 포트, 먼지 유출구, 및 공기 송풍 포트가 제공된 제2 하우징으로서, 먼지 유출구 및 공기 송풍 포트는 제2 하우징의 반대 단부들 둘 다 상에 배열된 제2 하우징; 먼지 추출 포트에 끼워맞춰지는 먼지 유출구; 공기 배출 포트에 끼워맞춰지는 공기 송풍 포트; 및 제2 하우징 상에 배치된 작동 구성요소를 포함하며, 로봇 청소기는 이동하고 청소한다. 지능형 청소 시스템은 로봇 청소기 박스의 클리어런스 비율을 효과적으로 개선할 수 있어 로봇 청소기 박스의 내부의 철저한 청소를 보장하고 곰팡이를 회피한다.
Description
본 출원은 지능형 가전 제품들의 분야에 속하는 지능형 청소 시스템에 관한 것이다.
일반적으로, 청소 로봇 먼지 추출 시스템은 청소 로봇 및 유지 스테이션을 포함한다. 그의 작동 원리는 이하와 같다: 유지 스테이션 내에 팬이 있고; 청소 로봇이 청소를 완료할 때, 그것은 유지 스테이션으로 자동으로 복귀한다. 유지 스테이션 내의 팬의 회전에 의해 발생되는 풍압에 의존하면, 청소 로봇의 먼지 박스 내의 쓰레기가 빠져나오게 된다. 유지 스테이션의 먼지 박스의 부피가 청소 로봇의 것보다 훨씬 더 크기 때문에, 사용자는 청소 로봇의 먼지 박스 내의 먼지를 청소하는데 필요하지 않으며, 그것에 의해 사용자 투기의 빈도를 감소시킨다.
그러나, 기존 청소 로봇 먼지 추출 시스템의 청소 로봇 상에 하나의 먼지 배출 포트만이 있다. 그러나, 먼지 배출 포트의 크기는 통상적으로 먼지 박스의 크기보다 훨씬 더 작다. 먼지 배출 포트는 먼지 박스의 하단 표면의 일 측면 상에 배열된다. 이러한 방식으로, 청소 로봇의 먼지 박스에서 청소하기 위한 데드 코너들이 있다. 먼지 배출 비율(클리어런스 비율)은 높지 않다. 한편으로는, 사용자들은 여전히 때때로 그것을 청소할 필요가 있고; 다른 한편으로는, 오랫동안 데드 코너에 존재했던 쓰레기는 곰팡의 위험을 갖는다.
게다가, 기존 청소 기계 먼지 추출 시스템이 청소 작업들을 수행할 때, 유지 스테이션은 고정 시간 동안만 실행되고 그 다음 정지한다. 먼지 박스 내에 많은 유모 잔해가 있거나 먼지 흡입 채널이 차단되면, 청소 로봇의 먼지 박스 내의 먼지는 완전히 비어 있지 않을 것이다. 그러나, 먼지 추출 작업은 이때에 종료했지만, 유지 스테이션의 팬은 여전히 실행되고 있어, 낭비된 에너지 및 소음을 초래한다.
제1 양태에 따르면, 본 출원의 목적은 청소 로봇의 먼지 박스의 클리어런스 비율을 효과적으로 개선할 수 있어, 청소 로봇의 먼지 박스의 내부가 완전히 깨끗한 것을 보장하고 곰팡이를 방지하는, 지능형 청소 시스템을 제공하는 것이다.
상기 목적을 달성하기 위하여, 본 출원은 다음의 기술적 해결책을 제공한다:
지능형 청소 시스템으로서, 청소 로봇 및 상기 청소 로봇과 결합하도록 구성된 유지 스테이션을 포함하며, 상기 유지 스테이션은,
먼지 추출 포트 및 공기 배출 포트가 제공된 제1 쉘;
상기 제1 쉘 상에 배열된 제1 팬으로서, 상기 제1 팬의 공기 배출 단부 및 공기 흡입 단부는 상기 공기 배출 포트 및 상기 먼지 추출 포트와 각각 연통하는 제1 팬; 및
상기 제1 쉘 상에 배치되고 상기 청소 로봇을 충전하도록 구성된 충전 어셈블리를 포함하고;
상기 청소 로봇은,
먼지 흡입 포트, 먼지 유출구 포트 및 공기 송풍 포트가 제공된 제2 쉘로서; 상기 먼지 유출구 포트 및 상기 공기 송풍 포트는 상기 제2 쉘의 반대 단부들에 배열되고; 상기 먼지 유출구 포트는 상기 먼지 추출 포트와 결합하도록 구성되고, 상기 공기 송풍 포트는 상기 공기 배출 포트와 결합하도록 구성된 제2 쉘; 및
상기 제2 쉘 상에 배열되어 상기 청소 로봇을 구동하여 이동시키고 청소하는 작동 어셈블리를 포함한다.
또한, 상기 제2 쉘은 하단 표면을 갖고; 상기 먼지 유출구 포트 및 상기 공기 흐름 포트는 상기 하단 표면의 반대 단부들에 각각 배열된다.
또한, 상기 하단 표면은 제1 하단 표면 및 제2 하단 표면을 포함하고; 상기 제2 하단 표면의 높이는 상기 청소 로봇의 수직 방향으로 상기 제1 하단 표면의 높이보다 더 높고; 상기 먼지 유출구 포트 및 상기 공기 흐름 포트는 상기 제1 하단 표면 상에 배열되고, 상기 먼지 흡입 포트는 상기 제2 하단 표면 상에 배열된다.
또한, 공기 유입구 밸브는 상기 공기 흐름 포트에 제공되고; 상기 청소 로봇이 작동 상태에 있을 때, 상기 공기 유입구 밸브는 상기 공기 흐름 포트를 폐쇄하고; 상기 청소 로봇이 상기 유지 스테이션과 결합될 때, 상기 공기 유입구 밸브는 상기 공기 흐름 포트를 개방하여, 상기 공기 흐름 포트는 상기 공기 배출 포트와 연통한다.
또한, 먼지 배출 밸브는 상기 먼지 유출구 포트에 제공되고; 상기 청소 로봇이 상기 작동 상태에 있을 때, 상기 먼지 배출 밸브는 상기 먼지 유출구 포트를 폐쇄하고; 상기 청소 로봇이 상기 유지 스테이션과 결합될 때, 상기 먼지 배출 밸브는 상기 먼지 유출구 포트를 개방하여, 상기 먼지 유출구 포트는 상기 먼지 추출 포트와 연통한다.
또한, 상기 제2 쉘은 수용 공간을 갖고; 상기 청소 로봇이 작동 상태에 있을 때, 상기 수용 공간은 부압 상태에 있다.
또한, 상기 작동 어셈블리는 상기 먼지 흡입 포트에 배치된 지면 브러시 어셈블리, 상기 지면 브러시 어셈블리를 회전시키기 위한 구동 어셈블리, 상기 청소 로봇을 이동시키기 위한 이동 어셈블리, 및 부압 상태에서 수용 공간을 이루기 위한 제2 팬을 포함한다.
또한, 상기 작동 어셈블리는 상기 제2 팬과 상기 수용 공간 사이에 배열되는 필터를 더 포함하고; 상기 청소 로봇이 상기 작동 상태에 있을 때, 먼지 운반 기류는 상기 먼지 흡입 포트로부터 상기 수용 공간으로 진입하고, 상기 필터를 통과한 후에 상기 제2 팬에 진입한다.
또한, 상기 유지 스테이션은 상기 제2 쉘로부터 추출되는 먼지를 저장하기 위한 먼지 저장 박스, 및 상기 먼지 저장 박스 및 상기 먼지 추출 포트와 연통하는 먼지 추출 채널을 더 포함한다.
또한, 먼지 추출 채널 내에는 먼지 검출 장치가 배치된다.
또한, 먼지 추출 채널 및/또는 먼지 저장 박스 내에는 자외선 살균 램프가 제공된다.
또한, 상기 제1 팬의 공기 배출 단부는 아크 형상 공기 채널 또는 경사 공기 채널을 통해 상기 공기 배출 포트와 연통한다.
선행 기술과 비교하여, 본 출원의 유익한 효과는 이하와 같다: 본 출원의 지능형 청소 시스템에는 유지 스테이션의 제1 쉘 상의 먼지 추출 포트 및 공기 배출 포트가 제공되고, 청소 로봇의 제2 쉘 상의 먼지 유출구 포트 및 공기 송풍 포트가 제공된다. 공기는 제1 쉘에서 제1 팬에 의해 공기 배출 포트로부터 배출되고, 공기 송풍 포트로부터 제2 쉘 내로 진입하며, 이는 특정 운동 에너지를 제2 쉘 내의 먼지에 인가하여 먼지를 뜨게 하고, 그 다음 제1 팬은 먼지를 먼지 유출구 포트로부터 유지 스테이션 내로 흡입하기 위해 사용된다. 그 결과, 청소 로봇의 먼지 박스의 클리어런스 비율이 개선되며, 그것에 의해 청소 로봇의 먼지 박스의 내부가 완전히 깨끗한 것을 보장하고 곰팡이를 방지한다.
제2 양태에 따르면, 본 출원의 목적은 청소 로봇의 먼지 박스의 클리어런스 비율을 효과적으로 개선할 수 있어, 청소 로봇의 먼지 박스의 내부가 완전히 깨끗한 것을 보장하고, 곰팡이를 회피하고, 캐비티 내의 다량의 박테리아를 회피하는, 지능형 청소 시스템을 제공하는 것이다.
상기 목적을 달성하기 위하여, 본 출원은 다음의 기술적 해결책을 제공한다:
지능형 청소 시스템으로서, 청소 로봇 및 상기 청소 로봇과 결합하도록 구성된 유지 스테이션을 포함하며, 상기 유지 스테이션은,
먼지 추출 포트가 제공된 제1 쉘;
상기 제1 쉘 상에 배열된 제1 팬으로서, 상기 제1 팬의 공기 흡입 단부는 상기 청소 로봇으로부터 먼지를 추출하는데 사용되기 위해 상기 먼지 추출 포트와 연통하는 제1 팬;
상기 제1 쉘 내에 제공된 캐비티로서, 상기 캐비티는 먼지 추출 채널을 통해 상기 먼지 추출 포트와 연통하며, 살균 장치는 상기 먼지 추출 채널 및/또는 상기 캐비티 내에 제공된 캐비티; 및
상기 제1 쉘 상에 배치되고 상기 청소 로봇을 충전하도록 구성된 충전 어셈블리를 포함하고;
상기 청소 로봇은,
먼지 흡입 포트 및 먼지 유출구 포트가 제공된 제2 쉘로서, 상기 먼지 유출구 포트는 상기 먼지 추출 포트와 결합하도록 구성된 제2 쉘; 및
상기 제2 쉘 상에 배열되어 상기 청소 로봇을 구동하여 이동시키고 청소하는 작동 어셈블리를 포함한다.
또한, 상기 제1 쉘에는 공기 배출 포트가 더 제공되고, 상기 제1 팬의 공기 배출 단부는 상기 공기 배출 포트와 연통하고; 상기 제2 쉘에는 상기 공기 배출 포트와 결합되는 공기 흐름 포트가 제공된다.
또한, 상기 제2 쉘은 하단 표면을 갖고; 상기 먼지 유출구 포트 및 상기 공기 흐름 포트는 상기 하단 표면의 반대 단부들에 각각 배열된다.
또한, 상기 하단 표면은 제1 하단 표면 및 제2 하단 표면을 포함하고; 상기 제2 하단 표면의 높이는 상기 청소 로봇의 수직 방향으로 상기 제1 하단 표면의 높이보다 더 높고; 상기 먼지 유출구 포트 및 상기 공기 흐름 포트는 상기 제1 하단 표면 상에 배열되고, 상기 먼지 흡입 포트는 상기 제2 하단 표면 상에 배열된다.
또한, 공기 유입구 밸브는 상기 공기 흐름 포트에 제공되고; 상기 청소 로봇이 작동 상태에 있을 때, 상기 공기 유입구 밸브는 상기 공기 흐름 포트를 폐쇄하고; 상기 청소 로봇이 상기 유지 스테이션과 결합될 때, 상기 공기 유입구 밸브는 상기 공기 흐름 포트를 개방하여, 상기 공기 흐름 포트는 상기 공기 배출 포트와 연통한다.
또한, 먼지 배출 밸브는 상기 먼지 유출구 포트에 제공되고; 상기 청소 로봇이 상기 작동 상태에 있을 때, 상기 먼지 배출 밸브는 상기 먼지 유출구 포트를 폐쇄하고; 상기 청소 로봇이 상기 유지 스테이션과 결합될 때, 상기 먼지 배출 밸브는 상기 먼지 유출구 포트를 개방하여, 상기 먼지 유출구 포트는 상기 먼지 추출 포트와 연통한다.
또한, 상기 제2 쉘은 수용 공간을 갖고; 상기 청소 로봇이 작동 상태에 있을 때, 상기 수용 공간은 부압 상태에 있다.
또한, 상기 작동 어셈블리는 상기 먼지 흡입 포트에 배치된 지면 브러시 어셈블리, 상기 지면 브러시 어셈블리를 회전시키기 위한 구동 어셈블리, 상기 청소 로봇을 이동시키기 위한 이동 어셈블리, 및 부압 상태에서 수용 공간을 이루기 위한 제2 팬을 포함한다.
또한, 상기 작동 어셈블리는 상기 제2 팬과 상기 수용 공간 사이에 배열되는 필터를 더 포함하고; 상기 청소 로봇이 상기 작동 상태에 있을 때, 먼지 운반 기류는 상기 먼지 흡입 포트로부터 상기 수용 공간으로 진입하고, 상기 필터를 통과한 후에 상기 제2 팬에 진입한다.
또한, 먼지 검출 장치는 상기 먼지 추출 채널 내에 제공되고, 상기 먼지 검출 장치는 센서 및 마이크로프로세서를 포함하고, 상기 센서는 상기 마이크로프로세서와 전기적으로 연결되고, 상기 마이크로프로세서는 상기 제1 팬에 전기적으로 연결된다.
또한, 상기 먼저 추출 채널 및/또는 상기 캐비티 내에는 자외선 살균 램프가 제공된다.
또한, 상기 제1 팬의 공기 배출 단부는 아크 형상 공기 채널 또는 경사 공기 채널을 통해 상기 공기 배출 포트와 연통한다.
선행 기술과 비교하여, 본 출원의 유익한 효과는 이하와 같다: 본 출원의 지능형 청소 시스템에는 유지 스테이션의 제1 쉘 상의 먼지 추출 포트 및 공기 배출 포트가 제공되고, 청소 로봇의 제2 쉘 상의 먼지 유출구 포트 및 공기 송풍 포트가 제공된다. 공기는 제1 쉘에서 제1 팬에 의해 공기 배출 포트로부터 배출되고, 공기 송풍 포트로부터 제2 쉘 내로 진입하고, 이는 특정 운동 에너지를 제2 쉘 내의 먼지에 인가하여 먼지를 뜨게 하고, 그 다음 제1 팬은 먼지를 먼지 유출구 포트로부터 유지 스테이션 내로 흡입하기 위해 사용된다. 그 결과, 청소 로봇의 먼지 박스의 클리어런스 비율이 개선되며, 그것에 의해 청소 로봇의 먼지 박스의 내부가 완전히 깨끗한 것을 보장하고 곰팡이를 방지한다. 동시에, 캐비티 내에 살균 장치를 배치하는 것은 다량의 박테리아가 캐비티 내에 발생되는 것을 방지할 수 있으며, 그것에 의해 공기에 대한 이차 오염을 회피한다.
제3 양태에 따르면, 본 출원의 목적은 사용자에게 먼지 수집 버킷을 청소하도록 자동으로 재촉할 수 있는 먼지 수집 버킷의 먼지 충만 검출 시스템 및 방법을 제공하는 것이며, 이는 동작하기 편리하고 빠르다.
상기 목적을 달성하기 위하여, 본 출원은 다음의 기술적 해결책을 제공한다:
먼지 수집 버킷의 먼지 충만 검출 시스템으로서, 이는:
센서 및/또는 검출 회로를 포함하는 취득 유닛으로서, 상기 센서 및/또는 상기 검출 회로는 상기 먼지 수집 버킷의 파라미터를 검출하도록 구성된 취득 유닛;
상기 파라미터를 수신하고 상기 파라미터가 사전 설정된 임계치를 초과하는지를 결정하도록 구성된 처리 유닛; 및
사용자에게 관련 동작을 수행할 것을 상기시키도록 구성된 알람 유닛을 포함하며;
상기 처리 유닛은 결정 결과에 따라 표시 정보를 발송하라고 상기 알람 유닛에 명령한다.
또한, 상기 먼지 수집 버킷이 작동하고 있을 때, 상기 파라미터는 전류의 파라미터 및/또는 상기 먼지 수집 버킷의 먼지 추출 모터의 회전 속도의 파라미터이다.
또한, 상기 먼지 수집 버킷이 작동하고 있을 때, 상기 파라미터는 상기 먼지 수집 버킷의 먼지 버킷 내의 공기 압력의 파라미터이다.
또한, 상기 먼지 수집 버킷이 작동하고 있을 때, 상기 파라미터는 상기 먼지 수집 버킷의 먼지 버킷의 중량의 파라미터이다.
또한, 상기 파라미터가 상기 사전 설정된 임계치를 초과할 때, 상기 알람 유닛은 상기 사용자에게 상기 먼지 수집 버킷을 청소할 것을 상기시키기 위해 경보한다.
또한, 상기 먼지 수집 버킷이 작동하고 있을 때, 상기 파라미터는 상기 먼지 수집 버킷의 먼지 버킷의 위치내 시간의 파라미터이다.
또한, 상기 먼지 수집 버킷이 작동하고 있을 때, 상기 파라미터는 상기 먼지 수집 버킷의 먼지 추출 모터의 작동 시간들의 파라미터이다.
또한, 상기 먼지 수집 버킷이 동작중일 때, 상기 파라미터는 상기 먼지 수집 버킷의 먼지 버킷의 위치내 시간 내의 먼지 추출 모터의 작동 시간들의 파라미터이다.
제4 양태에 따르면, 본 출원은 또한 먼지 수집 버킷의 먼지 충만 검출 방법을 제공하며, 이는:
상기 먼지 수집 버킷의 파라미터를 검출하는 단계;
상기 파라미터가 사전 설정된 임계치를 초과하는지를 결정하는 단계; 및
결정 결과에 따라 표시 정보를 송신하는 단계를 포함하고, 상기 표시 정보는 알람 정보이다.
또한, 상기 방법은:
상기 파라미터가 상기 사전 설정된 임계치를 초과할 때 사용자에게 상기 먼지 수집 버킷을 청소할 것을 상기시키기 위해 표시 메시지를 송신하는 단계를 더 포함한다.
본 출원의 유익한 효과들은 먼지 수집 버킷의 취득된 파라미터를 사전 설정된 임계치와 비교하고, 파라미터가 사전 설정된 임계치를 초과하면, 경고 메시지는 사용자에게 먼지 수집 버킷을 청소할 것을 상기시키기 위해 발행될 것이며, 이는 편리하고 빠르다.
제5 양태에 따르면, 본 출원의 목적은 먼지 추출 프로세스 동안 제2 팬의 동작을 유지하며, 부압 상태에서 먼지 박스를 유지하여, 먼지가 먼지 추출 프로세스 동안 청소 로봇의 먼지 유입구 포트로부터 내뿜어지는 것을 방지하는, 청소 로봇의 먼지 박스의 청소 제어 방법, 장치 및 저장 매체를 제공하는 것이다.
상기 목적을 달성하기 위하여, 본 출원은 다음의 기술적 해결책을 제공한다:
청소 로봇의 먼지 박스의 청소 제어 방법으로서, 상기 청소 로봇은 유지 스테이션과 결합하도록 구성되고, 상기 유지 스테이션은 제1 팬을 갖고, 상기 청소 로봇은 제2 팬을 갖고, 상기 방법은:
충전을 위해 상기 청소 로봇을 상기 유지 스테이션과 결합시키는 단계;
상기 제2 팬을 우선 시작하고, 그 다음 상기 제1 팬을 시작하여 상기 청소 로봇으로부터 먼지를 추출하거나; 상기 제1 팬 및 상기 제2 팬을 동시에 시작하는 단계; 및
먼지 추출이 완료될 때, 상기 제1 팬을 우선 턴 오프하고, 그 다음 상기 제2 팬을 턴 오프하거나; 상기 제1 팬 및 상기 제2 팬을 동시에 턴 오프하는 단계를 포함한다.
또한, 상기 방법은:
여전히 상기 유지 스테이션 내로 인출되는 먼지가 있는지를 결정하고; 그렇지 않으면, 상기 제1 팬을 턴 오프하고, 상기 먼지 추출이 완료되고; 예이면, 상기 먼지 추출을 계속하는 단계를 더 포함한다.
또한, 상기 제1 팬의 공기 배출 단부는 공기 채널을 통해 상기 청소 로봇과 연통하며, 상기 제1 팬의 공기 흡입 단부는 먼지 추출 채널을 통해 상기 청소 로봇과 연통하고;
먼지 검출 장치는 여전히 상기 먼지 추출 채널 내로 인출되는 먼지가 있는지를 검출하기 위해 상기 먼지 추출 채널 내에 배열된다.
또한, 상기 방법은:
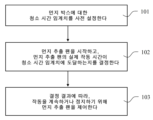
상기 먼지 추출을 수행하기 전에, 상기 먼지 박스의 청소 시간 임계치를 사전 설정하는 단계; 상기 제1 팬의 실제 작동 시간이 상기 청소 시간 임계치에 도달하는지를 결정하는 단계; 및 결정 결과에 따라 작동을 계속하거나 정지하기 위해 상기 제1 팬을 제어하는 단계를 더 포함한다.
또한, 상기 방법은:
상기 먼지 박스의 청소 시간 임계치를 사전 설정하기 전에, 상기 먼지 박스의 용량 및 상기 제1 팬의 작동 흐름을 획득하는 단계; 및
상기 먼지 박스의 용량 및 상기 제1 팬의 작동 흐름에 따라 상기 먼지 박스의 이상적인 청소 시간을 계산하는 단계를 더 포함하며; 상기 이상적인 청소 시간은,
T_min=A/B이고;
여기서, A는 상기 먼지 박스의 용량이고, B는 상기 제1 팬의 작동 흐름이다.
또한, 상기 방법은:
상기 제1 팬의 클린업 작동 시간을 설정하는 단계로서, 상기 클린업 작동 시간은 상기 이상적인 청소 시간보다 더 긴 단계; 및
상기 클린업 작동 시간을 상기 먼지 박스의 청소 시간 임계치로서 설정하는 단계를 더 포함하며; 상기 클린업 작동 시간은 이상적인 청소 시간의 N 배이고, N은 양의 정수이다.
또한, 상기 제1 팬은 공기 채널을 통해 상기 먼지 박스와 연결되고, 흐름 센서는 상기 공기 채널 내에 배치되고, 상기 흐름 센서는 상기 제1 팬의 작동 흐름을 검출하도록 구성된다.
또한, 상기 청소 시간 임계치는 고정 먼지 추출 시간이다.
본 출원은 청소 로봇의 먼지 박스의 청소 제어 장치를 제공하며, 상기 청소 로봇은 유지 스테이션과 결합하도록 구성되고, 상기 유지 스테이션은 제1 팬을 갖고, 상기 청소 로봇은 제2 팬을 갖고, 상기 장치는,
상기 먼지 박스의 청소 시간 임계치를 사전 설정하도록 구성된 사전 설정 모듈;
여전히 상기 유지 스테이션 내로 인출되는 먼저가 있는지를 결정하도록 구성되거나; 상기 제1 팬의 실제 작동 시간이 상기 제1 팬을 시작한 후에 상기 청소 시간 임계치에 도달했는지를 결정하도록 구성된 결정 모듈; 및
결정 결과에 따라 상기 제1 팬을 제어하도록 구성되거나; 작동을 계속하거나 정지하기 위해 상기 제1 팬 및 상기 제2 팬을 제어하도록 구성된 제어 모듈을 포함한다.
본 출원은 청소 로봇의 먼지 박스의 청소 제어 장치를 제공하며, 상기 장치는 프로세서 및 메모리를 포함하고, 프로그램은 상기 메모리에 저장되고, 상기 프로그램은 상술한 바와 같은 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 상기 프로세서에 의해 로딩되고 실행된다.
본 출원은 컴퓨터 판독가능 저장 매체를 제공하며, 이는 상기 저장 매체에 저장된 프로그램을 포함하고; 상기 프로그램은 상술한 바와 같은 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 프로세서에 의해 실행된다.
선행 기술과 비교하여, 본 출원의 유익한 효과들은,
1) 청소 로봇이 먼지 추출 프로세스 동안 제2 팬의 동작을 유지하고, 부압 상태에서 먼지 박스를 유지하게 하며, 그것에 의해 먼지가 먼지 추출 프로세스 동안 청소 로봇의 먼지 유입구 포트로부터 내뿜어지는 것을 방지하고;
2) 먼지가 흡입되는지를 검출하기 위해 먼지 추출 채널 내에 먼지 검출 장치를 설치함으로써, 유지 스테이션의 제1 팬이 유휴되는 것이 방지될 수 있으며, 그것에 의해 에너지 낭비 및 소음을 회피하고;
3) 먼지 박스의 청소 시간 임계치를 설정함으로써, 제1 팬의 실제 작동 시간이 청소 시간 임계치에 도달할 때, 제1 팬이 턴 오프되며, 이는 편리하고 지능적이고;
4) 먼지 박스의 용량 및 제1 팬의 작동 흐름을 획득함으로써, 제1 팬의 이상적인 청소 시간은 둘의 비율에 따라 계산된다. 이상적인 청소 시간에 따르면, 제1 팬의 클린업 작동 시간이 설정되며, 이는 빠르고 제1 팬의 유휴를 회피할 수 있으며, 그것에 의해 사용자 경험을 개선한다.
제6 양태에 따르면, 본 출원의 목적은 먼지 박스가 청소되는지를 지능적으로 결정하여 사용자 경험을 개선할 수 있는, 청소 로봇의 먼지 박스의 청소 제어 방법, 장치 및 저장 매체를 제공하는 것이다.
상기 목적을 달성하기 위하여, 본 출원은 다음의 기술적 해결책을 제공한다:
청소 로봇의 먼지 박스의 청소 제어 방법으로서, 상기 청소 로봇은 먼지 수집 버킷과 결합하도록 구성되고, 상기 청소 로봇은 먼지 박스를 갖고, 상기 먼지 수집 버킷은 먼지 추출 팬을 갖고, 상기 방법은,
상기 먼지 박스를 청소하는데 필요한 청소 시간 임계치를 사전 설정하는 단계;
상기 먼지 추출 팬을 시작하고, 상기 먼지 추출 팬의 실제 작동 시간이 상기 청소 시간 임계치에 도달하는지를 결정하는 단계; 및
결정 결과에 따라, 작동을 계속하거나 정지하기 위해 상기 먼지 추출 팬을 제어하는 단계를 포함한다.
선택적으로, 상기 방법은:
상기 먼지 박스를 청소하는데 필요한 청소 시간 임계치를 사전 설정하기 전에, 상기 먼지 박스의 용량을 획득하고, 상기 먼지 박스의 용량에 따라 상기 먼지 추출 팬의 평균 작동 흐름을 획득하는 단계; 및
상기 먼지 박스의 용량 및 상기 먼지 추출 팬의 평균 작동 흐름에 따라 상기 먼지 박스의 이상적인 청소 시간을 계산하는 단계를 더 포함하며; 상기 이상적인 청소 시간은,
T_min=k*A/B이며;
여기서 k >=1이고 자연수이며, A는 상기 먼지 박스의 용량이고, B는 상기 먼지 추출 팬의 평균 작동 흐름이다.
선택적으로, 상기 방법은:
상기 먼지 추출 팬의 클린업 작동 시간을 설정하고, 상기 클린업 작동 시간은 상기 이상적인 청소 시간보다 더 긴 단계; 및
상기 클린업 작동 시간을 상기 먼지 박스를 청소하는데 필요한 청소 시간 임계치로서 설정하는 단계를 더 포함한다.
선택적으로, 상기 클린업 작동 시간은 상기 이상적인 청소 시간의 N 배이며, 여기서 N은 양의 정수이다.
선택적으로, 상기 먼지 추출 팬은 공기 채널을 통해 상기 먼지 박스와 연결되고, 센서는 상기 공기 채널 내에 배치되고;
상기 센서는 상기 먼지 추출 팬의 평균 작동 흐름을 검출하도록 구성된다.
선택적으로, 상기 청소 시간 임계치는 고정 먼지 추출 시간이다.
본 출원은 청소 로봇의 먼지 박스의 청소 제어 장치를 제공하며, 상기 장치는:
상기 먼지 박스의 청소 시간 임계치를 사전 설정하도록 구성된 사전 설정 모듈;
상기 먼지 추출 팬이 시작된 후에 먼지 추출 팬의 실제 작동 시간이 상기 청소 시간 임계치에 도달하는지를 결정하도록 구성된 결정 모듈; 및
결정 결과에 따라 작동을 계속하거나 정지하기 위해 상기 먼지 추출 팬을 제어하도록 구성된 제어 모듈을 포함한다.
본 출원은 청소 로봇의 먼지 박스의 청소 제어 장치를 제공하며, 상기 장치는 프로세서 및 메모리를 포함하고, 프로그램은 상기 메모리에 저장되고, 상기 프로그램은 상술한 바와 같은 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 상기 프로세서에 의해 로딩되고 실행된다.
제4 양태에 따르면, 본 출원은 컴퓨터 판독가능 저장 매체를 제공하며, 이는 상기 저장 매체에 저장된 프로그램을 포함하고; 상기 프로그램은 상술한 바와 같은 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 프로세서에 의해 실행된다.
본 출원의 유익한 효과들은 먼지 박스의 청소 시간 임계치를 설정함으로써, 먼지 추출 팬의 실제 작동 시간이 청소 시간 임계치에 도달할 때, 먼지 추출 팬이 턴 오프되며, 이는 편리하고 지능적이고;
먼지 박스의 용량 및 먼지 추출 팬의 작동 흐름을 획득함으로써, 먼지 추출 팬의 이상적인 청소 시간은 둘의 비율에 따라 계산된다. 이상적인 청소 시간에 따르면, 먼지 추출 팬의 클린업 작동 시간이 설정되며, 이는 빠르고 먼지 추출 팬의 유휴를 회피할 수 있으며, 그것에 의해 사용자 경험을 개선한다.
상기 설명은 본 출원의 기술적 해결책의 개요일 뿐이다. 본 출원의 기술적 수단의 더 분명한 이해를 갖고 명세서의 내용들에 따라 그들을 구현하기 위해, 이하의 상세한 설명은 본 출원의 바람직한 실시예들 및 첨부 도면들을 참조하여 주어진다.
도 1은 본 출원의 일 실시예에 따른 지능형 청소 시스템의 개략 구조도이다.
도 2는 본 출원의 일 실시예에 따른 청소 로봇의 개략 구조도이다.
도 3은 본 출원의 일 실시예에 따른 청소 로봇의 구조 단면도이다.
도 4는 본 출원의 일 실시예에 따른 지능형 청소 시스템의 개략 구조도이다.
도 5는 본 출원의 일 실시예에 따른 청소 로봇의 개략 구조도이다.
도 6은 본 출원의 일 실시예에 따른 청소 로봇의 구조 단면도이다.
도 7은 본 출원의 먼지 수집 버킷의 먼지 충만 검출 시스템의 구조 블록도이다.
도 8은 본 출원의 먼지 수집 버킷의 먼지 충만 검출 방법의 흐름도이다.
도 9는 본 출원의 취득 유닛의 회로 개략도이다.
도 10은 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 방법이다.
도 11은 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 방법이다.
도 12는 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 방법이다.
도 13은 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치이다.
도 14는 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치이다.
도 15는 본 출원의 일 실시예에 의해 제공되는 일종의 지능형 청소 시스템이다.
도 16은 본 출원의 일 실시예에 의해 제공되는 일종의 지능형 청소 시스템이다.
도 17은 본 출원의 일 실시예에 의해 제공되는 일종의 지능형 청소 시스템이다.
도 18은 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 방법이다.
도 19는 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치이다.
도 20은 본 출원의 다른 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치이다.
도 2는 본 출원의 일 실시예에 따른 청소 로봇의 개략 구조도이다.
도 3은 본 출원의 일 실시예에 따른 청소 로봇의 구조 단면도이다.
도 4는 본 출원의 일 실시예에 따른 지능형 청소 시스템의 개략 구조도이다.
도 5는 본 출원의 일 실시예에 따른 청소 로봇의 개략 구조도이다.
도 6은 본 출원의 일 실시예에 따른 청소 로봇의 구조 단면도이다.
도 7은 본 출원의 먼지 수집 버킷의 먼지 충만 검출 시스템의 구조 블록도이다.
도 8은 본 출원의 먼지 수집 버킷의 먼지 충만 검출 방법의 흐름도이다.
도 9는 본 출원의 취득 유닛의 회로 개략도이다.
도 10은 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 방법이다.
도 11은 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 방법이다.
도 12는 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 방법이다.
도 13은 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치이다.
도 14는 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치이다.
도 15는 본 출원의 일 실시예에 의해 제공되는 일종의 지능형 청소 시스템이다.
도 16은 본 출원의 일 실시예에 의해 제공되는 일종의 지능형 청소 시스템이다.
도 17은 본 출원의 일 실시예에 의해 제공되는 일종의 지능형 청소 시스템이다.
도 18은 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 방법이다.
도 19는 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치이다.
도 20은 본 출원의 다른 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치이다.
본 출원의 특정 구현들은 첨부 도면들 및 실시예들을 참조하여 아래에 더 상세히 설명될 것이다. 이하의 예들은 본 출원을 예시하기 위해 사용되지만, 본 출원의 범위를 제한하도록 의도되지 않는다.
본 출원에서의 "상단", "하단", "좌측", "우측", "내부" 및 "외부"와 같은 용어들은 도면들을 참조하여 본 출원을 설명하기 위해서만 사용되고, 제한적인 용어들로서 사용되지 않는다는 점이 주목되어야 한다.
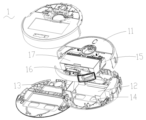
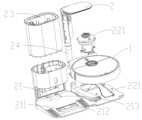
도 1 내지 도 3을 참조하면, 본 출원의 바람직한 실시예에 도시된 지능형 청소 시스템은 청소 로봇(1) 및 청소 로봇(1)과 결합하도록 구성된 유지 스테이션(2)을 포함한다. 유지 스테이션(2)은 이러한 실시예에서 청소 로봇(1)에 대한 충전 및 먼지 추출과 같은 기능들을 수행하기 위해 사용될 수 있다.
유지 스테이션(2)은 제1 쉘(21), 제1 쉘(21) 내에 배치된 제1 팬(22), 및 충전 어셈블리를 포함한다. 제1 쉘(21)에는 먼지 추출 포트(211) 및 공기 배출 포트(212)가 제공된다. 제1 팬(22)의 공기 배출 단부 및 공기 흡입 단부는 공기 배출 포트(212) 및 먼지 추출 포트(211)와 각각 연통한다. 이러한 실시예에서, 공기량의 손실을 감소시키기 위해, 제1 팬(22)의 공기 배출 단부 및 공기 배출 포트(212)는 경사 채널(221)을 통해 서로 연통된다. 유사하게, 공기 흡입 단부 및 먼지 추출 포트(211)는 또한 경사 채널을 통해 서로 연통될 수 있다. 실제로, 다른 실시예들에서, 아크 형상 공기 채널은 아크 형상 채널 등일 수 있다.
이러한 실시예에서, 충전 어셈블리 및 청소 로봇(1)은 일반적으로 접촉 충전을 위해 충전 탄성 시트(213)를 사용한다. 충전 탄성 시트(213) 및 제1 팬(22)은 둘 다 선행 기술에 있으며, 이는 여기서 상세히 설명되지 않는다.
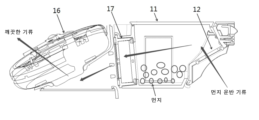
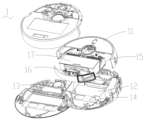
청소 로봇(1)은 제2 쉘(11) 및 제2 쉘(11) 내에 배치된 작동 어셈블리를 포함한다. 제2 쉘(11)에는 먼지 흡입 포트(12), 먼지 유출구 포트(13) 및 공기 송풍 포트(14)가 제공된다. 먼지 흡입 포트(12)는 청소 로봇(1)의 의 종래의 구조이고, 통상적으로 제2 쉘(11)의 하단에 제공된다. 이러한 실시예에서, 먼지 유출구 포트(13) 및 공기 송풍 포트(14)는 제2 쉘(11)의 반대 단부들에 배치된다. 먼지 유출구 포트(13)는 먼지 추출 포트(211)와 결합하도록 구성된다. 공기 송풍 포트(14)는 공기 배출 포트(212)와 결합하도록 구성된다. 제1 팬(22)은 공기 배출 포트(212)로부터 공기를 배출하고 공기 송풍 포트(14)로부터 제2 쉘(11)로 진입하며, 이는 특정 운동 에너지를 제2 쉘(11) 내의 먼지에 인가하여 먼지를 뜨게하고, 그 다음 제1 팬(22)은 먼지를 먼지 유출구 포트로부터 유지 스테이션(2) 내로 흡입하기 위해 사용된다. 그 결과, 청소 로봇(1)의 먼지 박스의 클리어런스 비율이 개선된다. 게다가, 작동 어셈블리는 또한 제2 쉘(11) 내에 제공되어, 청소 로봇(1)은 이동하고 청소할 수 있다.
구체적으로, 제2 쉘(11)은 하단 표면 및 수용 공간(110)을 갖는다. 먼지 유출구 포트(13) 및 공기 송풍 포트(14)는 하단 표면의 반대 단부들에 각각 배열된다. 더 바람직하게는, 하단 표면은 제1 하단 표면(111) 및 제2 하단 표면(112)을 포함한다. 청소 로봇(1)의 수직 방향에서, 제2 하단 표면(112)의 높이는 제1 하단 표면(111)의 것보다 더 높고, 먼지 유출구 포트(13) 및 공기 송풍 포트(14)는 제1 하단 표면(111) 상에 배열된다. 먼지 흡입 포트(12)는 제2 하단 표면(112) 상에 배열된다. 이러한 배열은 제2 쉘(11) 내로 흡입되는 먼지가 먼지 흡입 포트(12)로부터 용이하게 떨어져 나가지 않는 것을 보장한다. 한편, 이러한 실시예의 청소 로봇(1)에는 공기 송풍 포트(14)의 공기 유입구 밸브가 제공되고, 먼지 배출 밸브는 먼지 유출구 포트(13)에 제공된다. 청소 로봇(1)이 작동 상태에 있을 때, 수용 공간(110)은 부압 상태에 있고, 공기 유입구 밸브는 공기 송풍 포트(14)를 폐쇄하고, 먼지 배출 밸브는 먼지 유출구 포트(13)를 폐쇄하고, 먼지는 먼지 흡입 포트(12)로부터 흡입된다. 청소 로봇(1)이 유지 스테이션(2)과 결합될 때, 공기 유입구 밸브는 공기 송풍 포트(14)를 개방하고, 먼지 배출 밸브는 먼지 유출구 포트(13)를 개방한다. 그 결과, 공기 송풍 포트(14) 및 먼지 유출구 포트(13)는 공기 배출 포트(212) 및 먼지 추출 포트(211)와 각각 연통하여, 먼지 추출 작업이 수행된다.
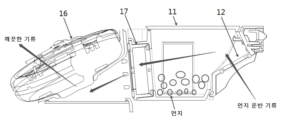
이러한 실시예에서, 작동 어셈블리는 먼지 흡입 포트(12)에 배치된 지면 브러시 어셈블리(15), 지면 브러시 어셈블리(15)를 구동하여 회전시키기 위한 구동 어셈블리, 청소 로봇(1)을 이동시키기 위한 이동 어셈블리, 및 부압 상태에 수용 공간(110)을 유지하기 위한 제2 팬(16)을 포함한다. 작동 어셈블리는 제2 팬(16)과 수용 공간(110) 사이에 배치되는 필터(17)를 더 포함한다. 청소 로봇(1)이 작동 상태에 있을 때, 제2 팬(16)은 작동하기 시작하여, 수용 공간(110)은 부압 상태에 있다. 지면 브러시 어셈블리(15) 및 제2 팬(16)의 액션 하에, 외부 먼지 운반 기류는 먼지 흡입 포트(12)로부터 수용 공간(110)으로 진입한다. 필터(17)를 통과한 후에, 먼지는 수용 공간(110)에 머무르고, 기류는 제2 팬(16)에 진입한다.
물론, 수용 공간(110)의 밀봉을 실현하기 위해, 제2 쉘(11)에는 또한 단부 커버, 및 밀봉 구조 등이 제공되며, 이는 선행 기술에 있고 여기서 설명되지 않을 것이다.
본 출원의 지능형 청소 시스템에서, 유지 스테이션(2)에는 제2 쉘(11)로부터 추출되는 먼지를 저장하기 위한 먼지 저장 박스(23), 및 먼지 저장 박스(23) 및 먼지 추출 포트(211)와 연통하는 먼지 추출 채널(24)이 더 제공된다. 먼지 검출 장치는 먼지 추출 채널(24) 내에 배치된다. 청소 로봇 상의 충전 탄성 시트가 유지 스테이션(2)의 충전 탄성 시트(213)와 접촉할 때, 유지 스테이션(2)의 제1 팬(22)은 먼지 추출 액션을 수행하기 위해 작동하기 시작한다. 청소 로봇의 먼지 박스 내의 먼지는 먼지 추출 채널(24)을 통해 먼지 저장 박스(23)로 진입한다. 먼지 검출 장치는 어떠한 먼지도 먼지 추출 통로(24)에 진입하지 않는 것을 검출할 때, 유지 스테이션(2)의 제1 팬(22)은 작동을 정지한다. 이러한 실시예에서, 먼지 검출 장치는 센서 및 마이크로프로세서를 포함한다. 센서는 마이크로프로세서에 전기적으로 연결된다. 마이크로프로세서는 제1 팬(22)에 전기적으로 연결된다. 센서는 여전히 먼지 추출 채널(24) 내로 인출되는 먼지가 있는지를 결정하기 위해 사용되고, 그 다음 마이크로프로세서는 센서 신호를 수신하고 제1 팬(22)의 온 또는 오프를 제어한다. 센서는 어떠한 먼지도 먼지 추출 채널(24) 내로 인출되지 않는 것을 결정할 때, 제1 팬(22)은 턴 오프되어 유휴를 회피하고, 에너지의 낭비를 회피하고 소음의 발생을 회피한다.
이러한 실시예에서, 자외선 살균 램프는 또한 먼지 저장 박스(23) 내에 제공된다. 분명히, 다른 실시예들에서, 자외선 살균 램프는 또한 먼지 추출 채널(24) 내에 배치될 수 있다. 그러나, 먼지 저장 박스(23) 내에 자외선 살균 램프를 배치하는 것은 완전한 살균을 보장할 수 있다. 청소 로봇의 충전 탄성 시트가 유지 스테이션(2)의 의 충전 탄성 시트(213)와 접촉할 때, 유지 스테이션(2)의 제1 팬(22)은 먼지 추출 액션을 수행하기 위해 작동하기 시작한다. 이때에, 먼지 저장 박스(23) 및/또는 먼지 추출 채널(24) 내의 자외선 살균 램프는 램프 업된다. 먼지는 먼지 추출 채널(24)을 통해 유지 스테이션(2)의 먼지 박스로 진입한다. 이러한 디자인은 다량의 박테리아가 유지 스테이션(2)의 먼지 저장 박스(23) 내에 발생되는 것을 방지할 수 있으며, 그것에 의해 공기에 대한 이차 오염을 회피한다.
요컨대, 본 출원의 지능형 청소 시스템에는 유지 스테이션의 제1 쉘 상의 먼지 추출 포트 및 공기 배출 포트가 제공되고, 청소 로봇의 제2 쉘 상의 먼지 유출구 포트 및 공기 송풍 포트가 제공된다. 공기는 제1 쉘에서 제1 팬에 의해 공기 배출 포트로부터 배출되고, 공기 송풍 포트로부터 제2 쉘 내로 진입하여, 이는 특정 운동 에너지를 제2 쉘 내의 먼지에 인가하여 먼지를 뜨게 하고, 그 다음 제1 팬은 먼지를 먼지 유출구 포트로부터 유지 스테이션 내로 흡입하기 위해 사용된다. 그 결과, 청소 로봇의 먼지 박스의 클리어런스 비율이 개선되며, 그것에 의해 청소 로봇의 먼지 박스의 내부가 완전히 깨끗한 것을 보장하고 곰팡이를 방지한다.
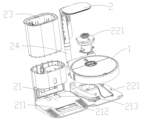
도 4 내지 도 6을 참조하면, 본 출원의 바람직한 실시예에 도시된 지능형 청소 시스템은 청소 로봇(1) 및 청소 로봇(1)과 결합하도록 구성된 유지 스테이션(2)을 포함한다. 이러한 실시예에서의 유지 스테이션(2)은 청소 로봇(1)에 대한 충전 및 먼지 추출과 같은 기능들을 수행하기 위해 사용될 수 있다.
유지 스테이션(2)은 제1 쉘(21), 제1 쉘(21) 내에 배치된 제1 팬(22), 및 충전 어셈블리를 포함한다. 제1 쉘(21)에는 먼지 추출 포트(211) 및 공기 배출 포트(212)가 제공된다. 제1 팬(22)의 공기 배출 단부 및 공기 흡입 단부는 공기 배출 포트(212) 및 먼지 추출 포트(211)와 각각 연통한다. 이러한 실시예에서, 공기량의 손실을 감소시키기 위해, 제1 팬(22)의 공기 배출 단부 및 공기 배출 포트(212)는 경사 채널(221)을 통해 서로 연통된다. 유사하게, 공기 흡입 단부 및 먼지 추출 포트(211)는 또한 경사 채널을 통해 서로 연통될 수 있다. 실제로, 다른 실시예들에서, 아크 형상 공기 채널은 아크 형상 채널 등일 수 있다.
이러한 실시예에서, 충전 어셈블리 및 청소 로봇(1)은 일반적으로접촉 충전을 위해 충전 탄성 시트(213)를 사용한다. 충전 탄성 시트(213) 및 제1 팬(22)은 둘 다 선행 기술에 있으며, 이는 여기서 상세히 설명되지 않는다.
청소 로봇(1)은 제2 쉘(11) 및 제2 쉘(11) 내에 배치된 작동 어셈블리를 포함한다. 제2 쉘(11)에는 먼지 흡입 포트(12), 먼지 유출구 포트(13) 및 공기 송풍 포트(14)가 제공된다. 먼지 흡입 포트(12)는 청소 로봇(1)의 종래의 구조이고, 통상적으로 제2 쉘(11)의 하단에 제공된다. 이러한 실시예에서, 먼지 유출구 포트(13) 및 공기 송풍 포트(14)는 제2 쉘(11)의 반대 단부들에 배치된다. 먼지 유출구 포트(13)는 먼지 추출 포트(211)와 결합하도록 구성된다. 공기 송풍 포트(14)는 공기 배출 포트(212)와 결합하도록 구성된다. 제1 팬(22)은 공기 배출 포트(212)로부터 공기를 배출하고 공기 송풍 포트(14)로부터 제2 쉘(11)로 진입하며, 이는 특정 운동 에너지를 제2 쉘(11) 내의 먼지에 인가하여 먼지를 뜨게 하고, 그 다음 제1 팬(22)은 먼지를 먼지 유출구 포트로부터 유지 스테이션(2) 내로 흡입하기 위해 사용된다. 그 결과, 청소 로봇(1)의 먼지 박스의 클리어런스 비율이 개선된다. 게다가, 작동 어셈블리는 또한 제2 쉘(11) 내에 제공되어, 청소 로봇(1)은 이동하고 청소할 수 있다.
구체적으로, 제2 쉘(11)은 하단 표면 및 수용 공간(110)을 갖는다. 먼지 유출구 포트(13) 및 공기 송풍 포트(14)는 하단 표면의 반대 단부들에 각각 배열된다. 더 바람직하게는, 하단 표면은 제1 하단 표면(111) 및 제2 하단 표면(112)을 포함한다. 청소 로봇(1)의 수직 방향에서, 제2 하단 표면(112)의 높이는 제1 하단 표면(111)의 것보다 더 높고, 먼지 유출구 포트(13) 및 공기 송풍 포트(14)는 제1 하단 표면(111) 상에 배열된다. 먼지 흡입 포트(12)는 제2 하단 표면(112) 상에 배열된다. 이러한 배열은 제2 쉘(11) 내로 흡입되는 먼지가 먼지 흡입 포트(12)로부터 용이하게 떨어져 나가지 않는 것을 보장한다. 한편, 이러한 실시예의 청소 로봇(1)에는 공기 송풍 포트(14)에서의 공기 유입구 밸브가 제공되고, 먼지 배출 밸브는 먼지 유출구 포트(13)에 제공된다. 청소 로봇(1)이 작동 상태에 있을 때, 수용 공간(110)은 부압 상태에 있고, 공기 유입구 밸브는 공기 송풍 포트(14)를 폐쇄하고, 먼지 배출 밸브는 먼지 유출구 포트(13)를 폐쇄하고, 먼지는 먼지 흡입 포트(12)로부터 흡입된다. 청소 로봇(1)이 유지 스테이션(2)과 결합될 때, 공기 유입구 밸브는 공기 송풍 포트(14)를 개방하고, 먼지 배출 밸브는 먼지 유출구 포트(13)를 개방한다. 그 결과, 공기 송풍 포트(14) 및 먼지 유출구 포트(13)는 공기 배출 포트(212) 및 먼지 추출 포트(211)와 각각 연통하여, 먼지 추출 작업이 수행된다.
이러한 실시예에서, 작동 어셈블리는 먼지 흡입 포트(12)에 배치된 지면 브러시 어셈블리(15), 지면 브러시 어셈블리(15)를 구동하여 회전시키기 위한 구동 어셈블리, 청소 로봇(1)을 이동시키기 위한 이동 어셈블리, 및 부압 상태에서 수용 공간(110)을 유지하기 위한 제2 팬(16)을 포함한다. 작동 어셈블리는 제2 팬(16)과 수용 공간(110) 사이에 배치되는 필터(17)를 더 포함한다. 청소 로봇(1)이 작동 상태에 있을 때, 제2 팬(16)은 작동하기 시작하여, 수용 공간(110)은 부압 상태에 있다. 지면 브러시 어셈블리(15) 및 제2 팬(16)의 액션 하에, 외부 먼지 운반 기류는 먼지 흡입 포트(12)로부터 수용 공간(110)으로 진입한다. 필터(17)를 통과한 후에, 먼지는 수용 공간(110)에 머무르고, 기류는 제2 팬(16)에 진입한다.
물론, 수용 공간(110)의 밀봉을 실현하기 위해, 제2 쉘(11)에는 또한 단부 커버, 및 밀봉 구조 등이 제공되며, 이는 선행 기술에 있고 여기서 설명되지 않을 것이다.
본 출원의 지능형 청소 시스템에서, 유지 스테이션(2)에는 제2 쉘(11)로부터 추출되는 먼지를 저장하기 위한 캐비티(23), 및 캐비티(23) 및 먼지 추출 포트(211)와 연통하는 먼지 추출 채널(24)이 더 제공된다. 바람직하게는, 먼지를 수집하기 위한 하나 이상의 먼지 백 구조, 또는 용이한 제거를 위한 하나 이상의 먼지 박스 구조는 캐비티(23) 내에 배열될 수 있다. 하나 이상의 먼지 백 구조 또는 하나 이상의 먼지 박스 구조의 특정 배열 방식은 실제 요구들에 따라 선택될 수 있다. 먼지 검출 장치는 먼지 추출 채널(24) 내에 배치된다. 청소 로봇 상의 충전 탄성 시트가 유지 스테이션(2)의 충전 탄성 시트(213)와 접촉할 때, 유지 스테이션(2)의 제1 팬(22)은 먼지 추출 액션을 수행하기 위해 작동하기 시작한다. 청소 로봇의 먼지 박스 내의 먼지는 먼지 추출 채널(24)을 통해 캐비티(23)로 진입한다. 먼지 검출 장치는 어떠한 먼지도 먼지 추출 통로(24)에 진입하지 않는 것을 검출할 때, 유지 스테이션(2)의 제1 팬(22)은 작동을 정지한다. 이러한 실시예에서, 먼지 검출 장치는 센서 및 마이크로프로세서를 포함한다. 센서는 마이크로프로세서에 전기적으로 연결된다. 마이크로프로세서는 제1 팬(22)에 전기적으로 연결된다. 센서는 여전히 먼지 추출 채널(24) 내로 인출되는 먼지가 있는지를 결정하기 위해 사용되고, 그 다음 마이크로프로세서는 센서 신호를 수신하고 제1 팬(22)의 온 또는 오프를 제어한다. 센서는 어떠한 먼지도 먼지 추출 채널(24) 내로 인출되지 않는 것을 결정할 때, 제1 팬(22)은 턴 오프되어 유휴를 회피하고, 에너지의 낭비를 회피하고 소음의 발생을 회피한다.
이러한 실시예에서, 살균 장치는 또한 캐비티(23) 내에 제공된다. 바람직하게는, 살균 장치는 자외선 살균 램프이다. 분명히, 다른 실시예들에서, 자외선 살균 램프는 또한 먼지 추출 채널(24) 내에 배치될 수 있다. 그러나, 캐비티(23) 내에 자외선 살균 램프를 배치하는 것은 완전한 살균을 보장할 수 있다. 청소 로봇의 충전 탄성 시트가 유지 스테이션(2)의 충전 탄성 시트(213)와 접촉할 때, 유지 스테이션(2)의 제1 팬(22)은 먼지 추출 액션을 수행하기 위해 작동하기 시작한다. 이때에, 캐비티(23) 및/또는 먼지 추출 채널(24) 내의 자외선 살균 램프는 램프 업된다. 먼지는 먼지 추출 채널(24)을 통해 유지 스테이션(2)의 먼지 박스로 진입한다. 이러한 디자인은 다량의 박테리아가 유지 스테이션(2)의 캐비티(23) 내에 발생되는 것을 방지할 수 있으며, 그것에 의해 공기에 대한 이차 오염을 회피한다.
요컨대, 본 출원의 지능형 청소 시스템에는 유지 스테이션의 제1 쉘 상의 먼지 추출 포트 및 공기 배출 포트가 제공되고, 청소 로봇의 제2 쉘 상의 먼지 유출구 포트 및 공기 송풍 포트가 제공된다. 공기는 제1 쉘에서 제1 팬에 의해 공기 배출 포트로부터 배출되고, 공기 송풍 포트로부터 제2 쉘 내로 진입하여, 이는 특정 운동 에너지를 제2 쉘 내의 먼지에 인가하여 먼지를 뜨게 하고, 그 다음 제1 팬은 먼지를 먼지 유출구 포트로부터 유지 스테이션 내로 흡입하기 위해 사용된다. 그 결과, 청소 로봇의 먼지 박스의 클리어런스 비율이 개선되며, 그것에 의해 청소 로봇의 먼지 박스의 내부가 완전히 깨끗한 것을 보장하고 곰팡이를 방지한다. 동시에, 캐비티 내에 살균 장치를 배치하는 것은 다량의 박테리아가 캐비티 내에 발생되는 것을 방지할 수 있으며, 그것에 의해 공기에 대한 이차 오염을 회피한다.
도 7을 참조하면, 본 출원의 바람직한 실시예에서 먼지 수집 버킷의 먼지 충만 검출 시스템은 먼지 수집 버킷 내의 먼지 버킷이 청소될 필요가 있는지를 검출하도록 구성된다. 청소가 필요하면, 경고는 사용자에게 상기시키기 위해 발행될 것이며, 이는 편리하고 빠르다. 그들 중에서, 먼지 수집 버킷은 청소 로봇과 결합된다. 먼지 수집 버킷은 청소 로봇과 통합될 수 있거나; 먼지 수집 버킷 및 청소 로봇은 별도로 배열될 수 있으며, 이는 여기서 구체적으로 제한되지 않고, 실제 상황에 의존한다. 먼지 수집 버킷이 청소 로봇과 통합될 때, 먼지 수집 버킷의 용량이 제한되기 때문에, 그것은 규칙적으로 적극적으로 청소될 필요가 있다. 먼지 수집 버킷 및 청소 로봇이 별도로 배열될 때, 청소 로봇은 청소 로봇이 작업을 수행하기 위해 먼지 수집 버킷과 결합되는 장소로 이동할 필요가 있다. 이러한 실시예에서, 먼지 수집 버킷 및 청소 로봇은 별도로 배열된다. 청소 로봇은 종래의 구조이며, 이는 본 출원에서 상세히 설명되지 않을 것이다.
먼지 수집 버킷은 쉘, 쉘 내에 배치된 먼지 버킷, 및 먼지 버킷을 연결하고 청소 로봇과 결합하기 위한 먼지 흡입 메커니즘을 포함한다. 먼지 흡입 메커니즘은 먼지 추출 모터, 먼지 버킷 및 청소 로봇을 연결하기 위한 파이프, 미립자 물질을 저장하기 위한 먼지 수집 박스 또는 먼지 수집 백, 및 기류를 필터링하기 위한 필터링 메커니즘을 포함한다. 청소 로봇이 먼지 수집 버킷과 결합될 때, 먼지 수집 버킷 내부의 먼지 추출 모터가 회전하고, 청소 로봇의 먼지 박스 내의 먼지는 먼지 수집 버킷 내로 흡입되며, 이는 편리하고 빠르다. 그들 중에서, 필터링 메커니즘은 종래의 구조이며, 이는 필터 스크린, 사이클론 분리기, 공기 유출구 HYPA 등을 포함할 수 있으며, 이는 여기서 상세히 설명되지 않는다.
먼지 수집 버킷은 또한 쉘 내에 또는 상에 배열되는 취득 유닛(10), 처리 유닛(20) 및 알람 유닛(30)을 포함한다. 구체적으로, 취득 유닛(10)은 먼지 수집 버킷의 파라미터를 검출하기 위해 사용된다. 처리 유닛(20)은 파라미터가 사전 설정된 임계치를 초과하는지를 결정하기 위해 사용된다. 알람 유닛(30)은 사용자에게 관련 동작들을 수행할 것을 상기시키기 위해 사용된다. 처리 유닛(20)은 결정 결과에 따라 표시 정보를 발송하하고 알람 유닛(30)에 명령한다. 구체적으로, 파라미터가 사전 설정된 임계치를 초과할 때, 알람 유닛(30)은 사용자에게 먼지 수집 버킷을 청소할 것을 상기시키기 위해 경보한다. 이러한 실시예에서, 취득 유닛(10)은 검출 회로 및/또는 센서이며, 이는 먼지 수집 버킷 내부의 상태를 감지하고 검출 결과를 전기 신호로 변환하기 위해 사용된다. 처리 유닛(20)은 마이크로프로세서이며, 이는 상이한 액션들을 수행하기 위해 먼지 수집 버킷을 제어하도록 취득 유닛(10)에 의해 송신되는 전기 신호를 수신하고 분석한다. 알람 유닛(30)은 광 신호 알람, 사운드 신호 알람 및 스크린 디스플레이 중 하나 이상이다. 대안적으로, 알람 유닛(30)은 네트워크에 액세스하는 단말 장치이다. 분명히, 다른 실시예들에서, 취득 유닛(10)은 또한 다른 것일 수 있고, 처리 유닛(20) 및 알람 유닛(30)은 또한 다른 것들일 수 있으며, 이들은 여기서 구체적으로 제한되지 않고, 실제 상황에 따라 결정된다.
도 9를 참조하면, 도 9는 검출 회로로서 취득 유닛(10)의 개략 회로도를 도시한다. 여기서, 검출 회로는 먼지 수집 버킷의 파라미터를 샘플링하기 위한 샘플링 저항기, 및 파라미터를 증폭하기 위한 일차 증폭 모듈 및 이차 증폭 모듈을 포함한다. 파라미터는 2개의 스테이지에서 증폭된 후에 처리 유닛(20)에 송신된다. 먼지 추출 팬의 2개의 극은 제1 저항기(R1)를 통해 연결되고, 샘플링 저항기(R2)의 일 단부에 연결된다. 샘플링 저항기(R2)의 다른 단부는 제1 커패시터(C1)의 일 단부에 연결된다. 제1 커패시터(C1)의 다른 단부는 일차 증폭 모듈에 연결된다. 일차 증폭 모듈 및 이차 증폭 모듈은 제4 커패시터(C4)를 통해 연결된다.
일차 증폭 모듈은 제1 증폭기(U1)를 포함한다. 제1 커패시터(C1)의 다른 단부는 제1 증폭기(U1)의 순방향 입력 단부에 연결된다. 제1 증폭기(U1)의 역방향 입력 단부는 제2 커패시터(C2)의 일 단부에 연결된다. 제2 커패시터(C2)의 다른 단부는 제3 저항기(R3)의 일 단부에 연결되고 그 다음 제1 커패시터(C1)의 연결 단부 및 제1 증폭기(U1)에 연결된다. 제3 저항기(R3)의 다른 단부는 제4 저항기(R4)의 일 단부에 연결되고 그 다음 접지된다. 제4 저항기(R4)의 다른 단부는 제2 커패시터(C2) 및 제5 저항기(R5)의 일 단부에 연결된다. 제5 저항기(R5)의 다른 단부는 제3 커패시터(C3)의 일 단부 및 제1 증폭기(U1)의 출력 단부에 연결된다. 제3 커패시터(C3)의 다른 단부는 접지된다.
이차 증폭 모듈은 제2 증폭기(U2)를 포함한다. 제4 커패시터(C4)의 일 단부는 제1 증폭기(U1)의 출력 단부에 연결되고, 제4 커패시터(C4)의 다른 단부는 제2 증폭기(U2)의 순방향 입력 단부에 연결된다. 제2 증폭기(U2)의 역방향 입력 단부는 제5 커패시터(C5)의 일 단부에 연결된다. 제5 커패시터(C5)의 다른 단부는 제6 저항기(R6)의 일 단부에 연결된다. 제6 저항기(R6)의 다른 단부는 제7 저항기(R7)의 일 단부에 연결되고 그 다음 접지된다. 제7 저항기(R7)의 다른 단부는 제5 커패시터(C5) 및 제8 저항기(R8)의 일 단부에 연결된다. 제8 저항기(R8)의 다른 단부는 제9 저항기(R9)의 일 단부에 연결된다. 제9 저항기(R9)의 다른 단부는 제6 커패시터(C6)의 일 단부에 연결된다. 제6 커패시터(C6)의 다른 단부는 접지된다.
먼지 수집 버킷이 작동하고 있을 때, 파라미터는 먼지 수집 버킷의 먼지 추출 모터의 전류의 파라미터이다. 대응적으로, 이러한 실시예에서, 취득 유닛(10)은 검출 회로이다. 검출 회로는 먼지 수집 버킷의 전류의 파라미터를 취득하고 그 다음 전류의 의 파라미터를 마이크로프로세서에 송신하기 위해 사용된다. 구체적으로, 먼지 수집 버킷이 비어 있을 때, 먼지 수집 버킷 내의 먼지 추출 모터는 청소 로봇의 먼지 박스로부터 먼지를 흡수한다. 이때에, 먼지 추출 모터의 하중은 상대적으로 크고, 따라서, 먼지 추출 모터의 전류는 가장 크다. 먼지 및 잔해가 점진적으로 증가함에 따라, 그들은 먼지 수집 버킷의 공기 유출구 HYPA에 부착되며, 이는 공기 유출구 HYPA가 차단되게 할 것이다. 그 결과, 먼지 추출 모터의 하중은 더 작아지고, 먼지 추출 모터의 전류는 더 작아진다. 잔해 및 먼지가 공기 유출구 HYPA를 완전히 차단할 때, 먼지 추출 모터는 어떠한 하중도 동등하지 않고, 먼지 추출 모터의 전류는 가장 작다. 따라서, 마이크로프로세서에서의 사전 설정된 임계치는 추출 모터의 전류의 최소 값에 가까운 값이다. 검출 회로는 먼지 추출 모터의 전류가 사전 설정된 임계치 미만인 것을 검출할 때, 알람 유닛(30)은 사용자에게 먼지 수집 버킷을 청소할 것을 상기시키기 위해 활성화된다.
대안적으로, 먼지 수집 버킷이 작동하고 있을 때, 파라미터는 먼지 수집 버킷의 먼지 추출 모터의 회전 속도의 파라미터이다. 대응적으로, 이러한 실시예에서, 취득 유닛(10)은 홀 센서, 자석, 및 홀 센서에 전기적으로 연결된 검출 회로이다. 여기서, 자석은 먼지 추출 모터 상에 배열될 수 있다. 홀 센서는 먼지 추출 모터의 회전 속도를 검출하기 위해 자석의 일 측면 상에 배열된다. 홀 센서 및 자석은 먼지 추출 모터의 회전 속도의 파라미터를 검출하기 위해 상호 유도된다. 검출 회로는 회전 속도의 파라미터를 취득하고 회전 속도의 파라미터를 마이크로프로세서에 송신한다. 구체적으로, 먼지 수집 버킷가 비어 있을 때, 먼지 수집 버킷 내의 먼지 추출 모터는 청소 로봇의 먼지 박스로부터 먼지를 흡수하고, 먼지 추출 모터의 하중은 이때에 상대적으로 크다. 대응적으로, 먼지 추출 모터의 회전 속도는 정전력을 유지하여 작동하기 위해 느리다. 먼지 및 잔해가 축적됨에 따라, 먼지 버킷 내부의 중량은 증가할 것이다. 먼지 버킷 내의 입자들은 공기 유출구를 차단하고, 먼지 추출 모터는 작은 하중을 갖는다. 먼지 추출 모터 작동을 정전력으로 유지하기 위해, 먼지 추출 모터의 회전 속도가 증가된다. 따라서, 마이크로프로세서에서의 사전 설정된 임계치는 먼지 추출 모터의 최대 회전 속도에 가까운 값이다. 검출 회로는 먼지 추출 모터의 회전 속도가 사전 설정된 임계치보다 더 큰 것을 검출할 때, 알람 유닛(30)은 사용자에게 먼지 수집 버킷을 청소할 것을 상기시키기 위해 활성화된다.
대안적으로, 먼지 수집 버킷이 작동하고 있을 때, 파라미터는 먼지 수집 버킷의 먼지 버킷 내의 공기 압력의 파라미터이다. 대응적으로, 이러한 실시예에서, 취득 유닛(10)은 쉘 내에 배치된 공기 압력 센서 및 공기 압력 센서에 전기적으로 연결된 검출 회로이다. 공기 압력 센서는 쉘 내의 공기 압력의 파라미터를 검출하기 위해 사용된다. 검출 회로는 공기 압력의 파라미터를 취득하고 공기 압력의 파라미터를 마이크로프로세서에 송신한다. 구체적으로, 먼지 수집 버킷이 비어 있을 경우, 이때에, 먼지 수집 버킷은 먼지 추출 모터를 시작하지 않는다. 먼지 수집 버킷의 내부는 외부 분위기에 연통한다. 공기 압력 센서는 분위기의 참조 공기 압력을 수집한다. 이때에, 수집된 공기 압력 값은 가장 크고, 공기 압력 값은 초기 참조 공기 압력이다. 먼지 및 잔해가 점진적으로 증가함에 따라, 먼지 수집 버킷 내에 점점 더 많은 먼지 및 미세 잔해가 있을 것이고, 공기 압력 센서에 의해 수집되는 현재 공기 압력의 공기 압력 값은 점점 더 작아질 것이다. 따라서, 마이크로프로세서는 공기 압력 센서에 의해 수집되는 초기 참조 공기 압력 및 현재 수집된 공기 압력에 따른 차이를 둔다. 사전 설정된 임계치는 마이크로프로세서에 저장된다. 차이가 사전 설정된 임계치보다 더 클 때, 먼지 수집 버킷이 심하게 차단된 것, 즉, 먼지 박스가 먼지로 가득찬 것으로 간주되어, 알람 유닛(30)은 사용자에게 먼지 수집 버킷을 청소할 것을 상기시키기 위해 활성화된다.
대안적으로, 먼지 수집 버킷이 작동하고 있을 때, 파라미터는 먼지 수집 버킷의 먼지 버킷의 중량의 파라미터이다. 대응적으로, 이러한 실시예에서, 취득 유닛(10)은 중량 센서 및 중량 센서에 전기적으로 연결된 검출 회로이다. 여기서, 중량 센서는 먼지 버킷 상에 배열된다. 중량 센서는 먼지 버킷의 중량을 검출한다. 검출 회로는 중량의 파라미터를 획득하고 회전 속도의 파라미터를 마이크로프로세서에 송신한다. 구체적으로, 먼지 수집 버킷이 비어 있고 먼지 수집 버킷 내의 먼지 추출 모터가 청소 로봇의 먼지 추출 모터의 먼지를 흡수할 때, 먼지 수집 버킷의 중량은 이때에 가장 가볍다. 먼지 및 잔해가 점진적으로 증가함에 따라, 먼지 버킷 내의 중량이 증가하여, 먼지 버킷이 점점 더 무거워지게 된다. 따라서, 마이크로프로세서 내의 사전 설정된 임계치는 먼지 버킷의 최대 중량에 가까운 값이다. 검출 회로에 의해 검출되는 중량의 파라미터가 사전 설정된 임계치보다 더 클 때, 알람 유닛(30)은 사용자에게 먼지 수집 버킷을 청소할 것을 상기시키기 위해 활성화된다.
대안적으로, 먼지 수집 버킷이 작동하고 있을 때, 파라미터는 먼지 수집 버킷의 먼지 버킷의 위치내 시간의 파라미터이다. 대응적으로, 이러한 실시예에서, 취득 유닛(10)은 위치내 센서 및 위치내 센서에 전기적으로 연결된 검출 회로이다. 여기서, 위치내 센서는 쉘 상에 배열된다. 위치내 센서는 먼지 버킷이 쉘에 있는지를 검출하고, 검출 회로는 쉘 내의 먼지 버킷의 시간 파라미터를 획득하고 시간 파라미터를 마이크로프로세서에 송신한다. 구체적으로, 사용자가 먼지 버킷을 청소할 때, 위치내 센서는 먼지 버킷을 검출할 수 없고 신호를 마이크로프로세서에 송신할 수 없다. 사용자가 먼지 버킷을 청소하는 것을 끝낸 후에, 위치내 센서는 먼지 버킷을 다시 검출하고 신호들을 마이크로프로세서에 계속 송신한다. 마이크로프로세서는 위치내 센서로부터 수신된 신호들의 시간 간격을 기록하고, 그 다음, 사용자가 먼지 버킷을 청소하는 시간 및 빈도를 취득, 분석 및 학습한다. 마이크로프로세서는 시간 임계치를 설정하기 위해 사용자의 청소 습관들(수신된 신호들의 타이밍에 의해 결정됨)을 심지어 취득할 수 있다. 시간 임계치는 임의의 시간일 수 있고, 마이크로프로세서에 의해 취득되는 청소 습관들에 따라 결정된다. 특정 시간이 시간 임계치에 가까울 때, 마이크로프로세서는 사용자에게 먼지 버킷을 청소할 것을 상기시키기 위해 표시를 발행하도록 알람 유닛을 제어한다.
대안적으로, 먼지 수집 버킷이 작동하고 있을 때, 파라미터는 먼지 수집 버킷의 먼지 추출 모터의 작동 시간들의 파라미터이다. 마이크로프로세서에서, 먼지 수집 버킷의 먼지 버킷의 최대 부피는 A로서 설정되고, 청소 로봇의 먼지 박스의 최대 부피는 B로서 설정된다. 따라서, 먼지 버킷 및 먼지 박스의 부피 비율은 N=A/B이다. 청소 로봇은 먼지 박스가 가득찬 것을 검출할 때, 그것은 먼지 수집 버킷과 결합하기 위해 먼지 수집 버킷으로 복귀한다. 먼지 추출 모터는 먼지 박스 내의 먼지 잔해를 먼지 버킷 내로 수집하기 시작하고, 마이크로프로세서가 작업 로그를 저장하게 한다. 먼지 추출 모터의 작동 빈도가 N에 가깝거나 이와 같을 때, 마이크로프로세서는 사용자에게 먼지 버킷을 청소할 것을 상기시키기 위해 명령어를 발행하도록 알람 유닛을 제어한다.
대안적으로, 먼지 수집 버킷이 작동하고 있을 때, 파라미터는 먼지 수집 버킷의 먼지 버킷의 위치내 시간 내의 먼지 추출 모터의 작동 시간들의 파라미터이다. 대응적으로, 이러한 실시예에서, 취득 유닛(10)은 위치내 센서 및 위치내 센서에 전기적으로 연결된 검출 회로이다. 여기서, 위치내 센서는 쉘 상에 배열된다. 위치내 센서는 먼지 버킷이 쉘에 있는지를 검출하고, 검출 회로는 쉘 내의 먼지 버킷의 시간 파라미터를 획득하고 및 시간 파라미터를 마이크로프로세서에 송신한다. 마이크로프로세서에서, 먼지 수집 버킷의 먼지 버킷의 최대 부피는 A로서 설정되고, 청소 로봇의 먼지 박스의 최대 부피는 B로서 설정된다. 따라서, 먼지 버킷 및 먼지 박스의 부피 비율은 N=A/B이다. 상기 실시예와 상이하게, 리마인더는 이러한 실시예에서 더 정확하다. 먼지 버킷의 위치내 시간 동안, 먼지 추출 모터의 작동 시간들의 최대 수는 N이다. 청소 로봇은 먼지 박스가 가득찬 것을 검출할 때, 그것은 먼지 버킷과 결합하기 위해 먼지 버킷으로 복귀한다. 먼지 추출 모터는 먼지 박스 내의 먼지 잔해를 먼지 버킷 내로 수집하기 시작하고, 마이크로프로세서가 작업 로그를 저장하게 한다. 먼지 추출 모터의 작동 빈도가 N에 가깝거나 이와 같을 때, 마이크로프로세서는 사용자에게 먼지 버킷을 청소할 것을 상기시키기 위해 명령어를 발행하도록 알람 유닛을 제어한다.
도 8을 참조하면, 본 출원은 또한 먼지 수집 버킷의 먼지 충만 검출 방법을 제공하며, 이 방법은,
먼지 수집 버킷의 파라미터를 검출하는 단계;
파라미터가 사전 설정된 임계치를 초과하는지를 결정하는 단계; 및
결정 결과에 따라 표시 정보를 송신하는 단계를 포함하고, 표시 정보는 알람 정보이다. 구체적으로, 파라미터가 사전 설정된 임계치를 초과할 때, 표시 메시지는 사용자에게 먼지 수집 버킷을 청소할 것을 상기시키기 위해 송신된다.
요컨대, 먼지 수집 버킷의 취득된 파라미터를 사전 설정된 임계치와 비교하고, 파라미터가 사전 설정된 임계치를 초과하면, 경고 메시지는 사용자에게 먼지 수집 버킷을 청소할 것을 상기시키기 위해 발행될 것이며, 이는 편리하고 빠르다.
도 10은 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 방법이며, 이는 스위핑 기계 시스템에 적용가능하다. 청소 로봇은 그의 먼지 박스로부터 먼지를 추출하기 위해 유지 스테이션과 결합된다. 청소 로봇 및 유지 스테이션은 실제 상황에 따라, 통합된 방식으로 또는 별도로 배열될 수 있으며, 이는 여기서 구체적으로 제한되지 않는다. 청소 로봇의 먼지 박스가 먼지 및 잔해로 가득찰 때, 청소 로봇은 먼지 박스를 청소하기 위해 유지 스테이션과 도킹한다.
유지 스테이션은 쉘, 쉘 내에 배치된 먼지 버킷, 및 쉘 내에 배치된 제1 팬을 포함한다. 여기서, 제1 팬의 공기 배출 단부 및 공기 흡입 단부는 공기 채널 및 먼지 추출 채널을 통해 먼지 박스와 각각 연통된다. 제1 팬의 작동 원리는 이하와 같다: 제1 팬의 공기 배출 단부는 공기를 공기 채널로부터 먼지 박스 내로 송풍하고, 특정 운동 에너지를 먼지 박스 내의 먼지에 적용한다. 먼지가 뜨게 된 후에, 제1 팬은 먼지를 먼지 추출 채널로부터 공기 흡입 단부를 통해 먼지 버킷 내로 인출한다. 그 결과, 청소 로봇의 먼지 박스의 클리어런스 비율이 개선되며, 그것에 의해 청소 로봇의 먼지 박스의 내부가 완전히 깨끗한 것을 보장하고 곰팡이를 방지한다. 유지 스테이션은 제1 팬에 전기적으로 연결된 마이크로프로세서를 더 포함하고, 사용자는 마이크로프로세서에서의 설정들을 통해 유지 스테이션을 제어할 수 있다. 방법은 적어도,
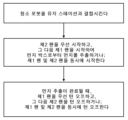
충전을 위해 청소 로봇을 유지 스테이션과 결합시키는 단계;
제2 팬을 우선 시작하고, 그 다음 제1 팬을 시작하여 청소 로봇으로부터 먼지를 추출하거나; 제1 팬 및 제2 팬을 동시에 시작하는 단계; 및
먼지 추출이 완료될 때, 제1 팬을 우선 턴 오프하고, 그 다음 제2 팬을 턴 오프하거나; 제1 팬 및 제2 팬을 턴 오프하는 단계를 포함한다.
구체적으로, 본 출원의 먼지 박스의 청소 제어 방법은 아래의 제1 실시예 및 제2 실시예에 도시된 방법들을 포함한다.
제1 실시예
도 11을 참조하면, 이러한 실시예에서, 먼지 박스의 청소 제어 방법은 이하를 포함한다:
단계 101, 먼지 박스의 청소 시간 임계치를 사전 설정한다.
일 실시예에서, 청소 시간 임계치는 고정 먼지 추출 시간이다. 즉, 고정 먼지 추출 시간이 설정된 후에, 제1 팬의 실제 작동 시간이 고정 먼지 추출 시간에 도달할 때, 제1 팬은 작동을 정지한다. 그러나, 이러한 설정 후에, 먼지 박스 내에 더 적은 먼지 및 잔해가 있으면, 제1 팬은 여전히 유휴로 계속 작동하고 실행할 것이며, 그것에 의해 소음을 발생시킨다. 따라서, 다른 실시예에서, 먼지 박스의 청소 시간 임계치를 사전 설정하기 전에, 먼지 박스의 용량 및 제1 팬의 작동 흐름은 우선 획득될 수 있다. 그 다음, 먼지 박스의 용량 및 제1 팬의 작동 흐름에 따르면, 먼지 박스의 이상적인 청소 시간이 계산된다.
구체적으로, 이상적인 청소 시간은,
T_min=A/B이며;
여기서, A는 먼지 박스의 용량이고, B는 제1 팬의 작동 흐름 이다.
이러한 설정의 목적은 제1 팬의 작동 흐름을 검출함으로써 먼지 박스 내에 먼지 및 잔해가 있는지를 결정하고, 그 다음 제1 팬을 계속을 작동하게 할지를 결정하는 것이다. 대응적으로, 흐름 센서는 공기 채널 내에 배열된다. 흐름 센서는 제1 팬의 작동 흐름을 검출하기 위해 사용된다. 흐름 센서는 마이크로프로세서와 신호 연결된다. 이러한 실시예에서, 흐름 센서의 유형은 그것이 제1 팬의 작동 흐름을 검출하는 목적을 달성할 수 있는 한, 구체적으로 제한되지 않는다.
그 다음, 제1 팬의 클린업 작동 시간이 설정되고, 클린업 작동 시간은 이상적인 청소 시간보다 더 길다. 클린업 작동 시간은 먼지 박스의 청소 시간 임계치로서 설정된다. 여기서, 클린업 작동 시간은 이상적인 청소 시간의 N 배이며, 여기서 N은 양의 정수이고, 이는 실제 상황에 따라 설정되고, 여기서 구체적으로 제한되지 않을 것이다. N은 1일 수 있거나, 임계치로서 설정될 수 있으며, 이는 실제 요구들에 따라 사용자에 의해 설정될 수 있다.
단계 102: 제2 팬을 우선 시작하거나, 그 다음 제1 팬을 시작하거나; 제1 팬 및 제2 팬을 동시에 시작하고; 제1 팬의 실제 작동 시간이 청소 시간 임계치에 도달하는지를 결정한다.
단계 103: 결정 결과에 따라 작동을 계속하거나 정지하기 위해 제1 팬 및 제2 팬을 제어하고; 실제 작동 시간이 청소 시간 임계치 이상이면, 마이크로프로세서는 작동을 순차적으로 또는 동시에 정지하기 위해 제1 팬 및 제2 팬을 제어하고; 그렇지 않으면, 제1 팬 및 제2 팬은 계속 작동하기 위해 제어된다.
요컨대, 먼지 박스의 청소 시간 임계치를 설정함으로써, 제1 팬의 실제 작동 시간이 청소 시간 임계치에 도달할 때, 제1 팬은 턴 오프되며, 이는 편리하고 지능적이다.
먼지 박스의 용량 및 제1 팬의 작동 흐름을 획득함으로써, 제1 팬의 이상적인 청소 시간은 둘의 비율에 따라 계산된다. 이상적인 청소 시간에 따르면, 제1 팬의 클린업 작동 시간이 설정되며, 이는 빠르고 제1 팬의 유휴를 회피할 수 있으며, 그것에 의해 사용자 경험을 개선한다.
제2 실시예
도 12를 참조하면, 이러한 실시예에서, 먼지 박스의 청소 제어 방법은 이하를 포함한다:
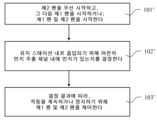
단계 101', 제2 팬을 우선 시작하고, 그 다음 제1 팬을 시작하거나; 제1 팬 및 제2 팬을 동시에 시작하고;
단계 102', 유지 스테이션 내로 흡입되기 위해 여전히 먼지 추출 채널 내에 먼지가 있는지를 결정하고;
단계 103', 결정 결과에 따라 작동을 계속하거나 정지하기 위해 제1 팬 및 제2 팬을 제어하고; 어떠한 먼지도 흡입되지 않으면, 마이크로프로세서는 작동을 순차적으로 또는 동시에 정지하기 위해 제1 팬 및 제2 팬을 제어하며; 그렇지 않으면, 제1 팬 및 제2 팬은 계속 작동하기 위해 제어된다.
이러한 실시예에서, 먼지 검출 장치는 먼지 추출 채널 내에 제공된다. 바람직하게는, 그것은 마이크로프로세서에 전기적으로 연결되는 먼지 센서이다. 센서는 여전히 먼지 추출 채널 내로 인출되는 먼지가 있는지를 결정하기 위해 사용되고, 그 다음 마이크로프로세서는 센서 신호를 수신하고 제1 팬의 작동 상태를 제어한다. 센서는 어떠한 먼지도 먼지 추출 채널 내로 인출되지 않는 것을 결정할 때, 제1 팬은 턴 오프되어 유휴를 회피하고, 에너지의 낭비를 회피하고 소음의 발생을 회피한다.
제1 실시예 및 제2 실시예에서, 청소 로봇은 그 위에 배치된 프로세서를 통해 제2 팬의 작동 조건을 제어할 수 있고, 또한 유지 스테이션의 마이크로프로세서에 의해 제2 팬의 작동 조건을 제어할 수 있다. 바람직하게는, 상기 청소 로봇이 유지 스테이션과 결합될 때, 마이크로프로세서는 제2 팬에 전기적으로 연결된다.
제3 실시예
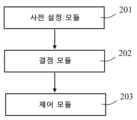
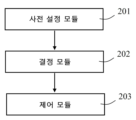
도 13은 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치이고, 장치는 적어도,
먼지 박스의 청소 시간 임계치를 사전 설정하도록 구성된 사전 설정 모듈(201);
여전히 유지 스테이션 내로 인출되는 먼지가 있는지를 결정하도록 구성되거나; 제1 팬의 실제 작동 시간이 제1 팬을 시작한 후에 청소 시간 임계치에 도달했는지를 결정하도록 구성된 결정 모듈(202); 및
결정 결과에 따라 작동을 계속하거나 정지하기 위해 제1 팬을 제어하도록 구성된 제어 모듈(203)을 포함한다.
관련 상세들에 대해, 상기 방법 실시예들을 참조한다.
상기 실시예들에 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치가 먼지 박스를 청소할 때, 상기 기능 모듈들의 분할만이 예시를 위한 일 예로서 사용된다는 점이 주목되어야 한다. 실제 적용들에서, 위에 언급된 기능들은 필요에 따라 상이한 기능 모듈들에 할당될 수 있다. 즉, 청소 로봇의 먼지 박스의 청소 제어 장치의 내부 구조는 전술된 기능들의 전부 또는 일부를 완료하기 위해 상이한 기능 모듈들로 분할된다. 게다가, 상기 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치 및 청소 로봇의 먼지 박스의 청소 제어 방법은 동일한 개념에 속한다. 청소 제어 장치의 특정 구현 프로세스는 방법 실시예에서 상세화되며, 이는 여기서 반복되지 않을 것이다.
제4 실시예
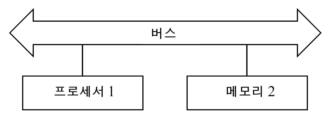
도 14는 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치이다. 장치는 적어도 프로세서 1 및 메모리 2를 포함한다.
프로세서 1은 4-코어 프로세서, 8-코어 프로세서 등과 같은, 하나 이상의 처리 코어를 포함할 수 있다. 프로세서 1은 DSP(Digital Signal Processing), FPGA(Field-Programmable Gate Array), 및 PLA(Programmable Logic Array) 중에서 적어도 하나의 하드웨어 형태로 구현될 수 있다. 프로세서 1은 또한 메인 프로세서 및 코프로세서를 포함할 수 있다. 메인 프로세서는 웨이크업 상태에서 데이터를 처리하기 위한 프로세서이고, 또한 CPU(Central Processing Unit)로 칭해진다. 코프로세서는 스탠바이 상태에서 데이터를 처리하기 위한 저전력 프로세서이다.
메모리 2는 하나 이상의 컴퓨터 판독가능 저장 매체를 포함할 수 있다. 컴퓨터 판독가능 저장 매체는 비일시적일 수 있다. 메모리 2는 또한 고속 랜덤 액세스 메모리뿐만 아니라, 비휘발성 메모리, 예컨대 하나 이상의 디스크 저장 장치, 플래시 저장 장치들을 포함할 수 있다. 일부 실시예들에서, 메모리 2 내의 비일시적 컴퓨터 판독가능 저장 매체는 적어도 하나의 명령어를 저장하기 위해 사용된다. 적어도 하나의 명령어는 본 출원의 방법 실시예들에서 제공되는 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 프로세서 1에 의해 로딩되고 실행된다.
일부 실시예들에서, 청소 로봇의 먼지 박스의 청소 제어 장치는 may 선택적으로 주변 장치 포트 및 적어도 하나의 주변 장치를 더 포함한다. 프로세서 1, 메모리 2 및 주변 장치 포트는 버스 또는 신호 라인에 연결될 수 있다. 각각의 주변 장치는 버스, 신호 라인 또는 회로 보드를 통해 주변 장치 포트에 연결될 수 있다. 예시적으로, 주변 장치들은 무선 주파수 회로들, 터치 스크린들, 오디오 회로들, 및 전원들 등을 포함하지만, 이들에 제한되지 않는다.
분명히, 청소 로봇의 먼지 박스의 청소 제어 장치는 더 적거나 더 많은 구성요소들을 더 포함할 수 있으며, 이는 이러한 실시예에서 제한되지 않는다.
선택적으로, 본 출원은 컴퓨터 판독가능 저장 매체를 제공한다. 컴퓨터 판독가능 저장 매체는 그 안에 저장된 프로그램을 포함한다. 프로그램은 전술된 바와 같이 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 프로세서 1에 의해 실행된다.
선택적으로, 본 출원은 또한 컴퓨터 제품을 제공한다. 컴퓨터 제품은 컴퓨터 판독가능 저장 매체를 포함한다. 프로그램은 컴퓨터 판독가능 저장 매체에 저장된다. 프로그램은 상기 방법 실시예들에 따른 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 프로세서 1에 의해 로딩되고 실행된다.
제5 실시예
도 15 내지 도 17을 참조하면, 본 출원의 바람직한 실시예에 도시된 지능형 청소 시스템은 청소 로봇(1) 및 청소 로봇(1)과 결합하도록 구성된 유지 스테이션(2)을 포함한다. 유지 스테이션(2)은 이러한 실시예에서 청소 로봇(1)에 대한 충전 및 먼지 추출과 같은 기능들을 수행하기 위해 사용될 수 있다.
유지 스테이션(2)은 제1 쉘(21), 제1 쉘(21) 내에 배치된 제1 팬(22), 및 충전 어셈블리를 포함한다. 제1 쉘(21)에는 먼지 추출 포트(211) 및 공기 배출 포트(212)가 제공된다. 제1 팬(22)의 공기 배출 단부 및 공기 흡입 단부는 공기 배출 포트(212) 및 먼지 추출 포트(211)와 각각 연통한다. 이러한 실시예에서, 공기량의 손실을 감소시키기 위해, 제1 팬(22)의 공기 배출 단부 및 공기 배출 포트(212)는 경사 채널(221)을 통해 서로 연통된다. 유사하게, 공기 흡입 단부 및 먼지 추출 포트(211)는 또한 경사 채널을 통해 서로 연통될 수 있다. 실제로, 다른 실시예들에서, 아크 형상 공기 채널은 아크 형상 채널 등일 수 있다.
이러한 실시예에서, 충전 어셈블리 및 청소 로봇(1)은 일반적으로 접촉 충전을 위해 충전 탄성 시트(213)를 사용한다. 충전 탄성 시트(213) 및 제1 팬(22)은 둘 다 선행 기술에 있으며, 이는 여기서 상세히 설명되지 않는다.
청소 로봇(1)은 제2 쉘(11) 및 제2 쉘(11) 내에 배치된 작동 어셈블리를 포함한다. 제2 쉘(11)에는 먼지 흡입 포트(12), 먼지 유출구 포트(13) 및 공기 송풍 포트(14)가 제공된다. 먼지 흡입 포트(12)는 청소 로봇(1)의 종래의 구조이고, 통상적으로 제2 쉘(11)의 하단에 제공된다. 이러한 실시예에서, 먼지 유출구 포트(13) 및 공기 송풍 포트(14)는 제2 쉘(11)의 반대 단부들에 배치된다. 먼지 유출구 포트(13)는 먼지 추출 포트(211)와 결합하도록 구성된다. 공기 송풍 포트(14)는 공기 배출 포트(212)와 결합하도록 구성된다. 제1 팬(22)은 공기 배출 포트(212)로부터 공기를 배출하고 공기 송풍 포트(14)로부터 제2 쉘(11)로 진입하며, 이는 특정 운동 에너지를 제2 쉘(11) 내의 먼지에 인가하여 먼지를 뜨게 하고, 그 다음 제1 팬(22)은 먼지를 먼지 유출구 포트로부터 유지 스테이션(2) 내로 흡입하기 위해 사용된다. 그 결과, 청소 로봇(1)의 먼지 박스의 클리어런스 비율이 개선된다. 게다가, 작동 어셈블리는 또한 제2 쉘(11) 내에 제공되어, 청소 로봇(1)은 이동하고 청소할 수 있다.
구체적으로, 제2 쉘(11)은 하단 표면 및 수용 공간(110)을 갖는다. 먼지 유출구 포트(13) 및 공기 송풍 포트(14)는 하단 표면의 반대 단부들에 각각 배열된다. 더 바람직하게는, 하단 표면은 제1 하단 표면(111) 및 제2 하단 표면(112)을 포함한다. 청소 로봇(1)의 수직 방향에서, 제2 하단 표면(112)의 높이는 제1 하단 표면(111)의 것보다 더 높고, 먼지 유출구 포트(13) 및 공기 송풍 포트(14)는 제1 하단 표면(111) 상에 배열된다. 먼지 흡입 포트(12)는 제2 하단 표면(112) 상에 배열된다. 이러한 배열은 제2 쉘(11) 내로 흡입되는 먼지가 먼지 흡입 포트(12)로부터 용이하게 떨어져 나가지 않는 것을 보장한다. 한편, 이러한 실시예의 청소 로봇(1)에는 공기 송풍 포트(14)에서의 공기 유입구 밸브가 제공되고, 먼지 배출 밸브는 먼지 유출구 포트(13)에 제공된다. 청소 로봇(1)이 작동 상태에 있을 때, 수용 공간(110)은 부압 상태에 있고, 공기 유입구 밸브는ㅍ공기 송풍 포트(14)를 폐쇄하고, 먼지 배출 밸브는 먼지 유출구 포트(13)를 폐쇄하고, 먼지는 먼지 흡입 포트(12)로부터 흡입된다. 청소 로봇(1)이 유지 스테이션(2)과 결합될 때, 공기 유입구 밸브는 공기 송풍 포트(14)를 개방하고, 먼지 배출 밸브는 먼지 유출구 포트(13)를 개방한다. 그 결과, 공기 송풍 포트(14) 및 먼지 유출구 포트(13)는 공기 배출 포트(212) 및 먼지 추출 포트(211)와 각각 연통하여, 먼지 추출 작업이 수행된다.
이러한 실시예에서, 작동 어셈블리는 먼지 흡입 포트(12)에 배치된 지면 브러시 어셈블리(15), 지면 브러시 어셈블리(15)를 구동하여 회전시키기 위한 구동 어셈블리, 청소 로봇(1)을 이동시키기 위한 이동 어셈블리, 및 부압 상태에서 수용 공간(110)을 유지하기 위한 제2 팬(16)을 포함한다. 작동 어셈블리는 제2 팬(16)과 수용 공간(110) 사이에 배치되는 필터(17)를 더 포함한다. 청소 로봇(1)이 작동 상태에 있을 때, 제2 팬(16)은 작동하기 시작하여, 수용 공간(110)은 부압 상태에 있다. 지면 브러시 어셈블리(15) 및 제2 팬(16)의 액션 하에, 외부 먼지 운반 기류는 먼지 흡입 포트(12)로부터 수용 공간(110)으로 진입한다. 필터(17)를 통과한 후에, 먼지는 수용 공간(110)에 머무르고, 기류는 제2 팬(16)에 진입한다.
물론, 수용 공간(110)의 밀봉을 실현하기 위해, 제2 쉘(11)에는 또한 단부 커버, 및 밀봉 구조 등이 제공되며, 이는 선행 기술에 있고 여기서 설명되지 않을 것이다.
본 출원의 지능형 청소 시스템에서, 유지 스테이션(2)에는 제2 쉘(11)로부터 추출되는 먼지를 저장하기 위한 먼지 저장 박스(23), 및 먼지 저장 박스(23) 및 먼지 추출 포트(211)와 연통하는 먼지 추출 채널(24)이 더 제공된다. 먼지 검출 장치는 먼지 추출 채널(24) 내에 배치된다. 청소 로봇 상의 충전 탄성 시트가 유지 스테이션(2)의 충전 탄성 시트(213)와 접촉할 때, 유지 스테이션(2)의 제1 팬(22)은 먼지 추출 액션을 수행하기 위해 작동하기 시작한다. 청소 로봇의 먼지 박스 내의 먼지는 먼지 추출 채널(24)을 통해 먼지 저장 박스(23)로 진입한다. 먼지 검출 장치는 어떠한 먼지도 먼지 추출 통로(24)에 진입하지 않는 것을 검출할 때, 유지 스테이션(2)의 제1 팬(22)은 작동을 정지한다. 이러한 실시예에서, 먼지 검출 장치는 센서 및 마이크로프로세서를 포함한다. 센서는 마이크로프로세서에 전기적으로 연결된다. 마이크로프로세서는 제1 팬(22)에 전기적으로 연결된다. 센서는 여전히 먼지 추출 채널(24) 내로 인출되는 먼지가 있는지를 결정하기 위해 사용되고, 그 다음 마이크로프로세서는 센서 신호를 수신하고 제1 팬(22)의 온 또는 오프를 제어한다. 센서는 어떠한 먼지도 먼지 추출 채널(24) 내로 인출되지 않는 것을 결정할 때, 제1 팬(22)은 턴 오프되어 유휴를 회피하고, 에너지의 낭비를 회피하고, 소음의 발생을 회피한다.
이러한 실시예에서, 자외선 살균 램프는 또한 먼지 저장 박스(23) 내에 제공된다. 분명히, 다른 실시예들에서, 자외선 살균 램프는 또한 먼지 추출 채널(24) 내에 배치될 수 있다. 그러나, 먼지 저장 박스(23) 내에 자외선 살균 램프를 배치하는 것은 완전한 살균을 보장할 수 있다. 청소 로봇의 충전 탄성 시트가 유지 스테이션(2)의 충전 탄성 시트(213)와 접촉할 때, 유지 스테이션(2)의 제1 팬(22)은 먼지 추출 액션을 수행하기 위해 작동하기 시작한다. 이때에, 먼지 저장 박스(23) 및/또는 먼지 추출 채널(24) 내의 자외선 살균 램프는 라이트 업된다. 먼지는 먼지 추출 채널(24)을 통해 유지 스테이션(2)의 먼지 박스로 진입한다. 이러한 디자인은 다량의 박테리아가 유지 스테이션(2)의 먼지 저장 박스(23) 내에 발생되는 것을 방지할 수 있으며, 그것에 의해 공기에 대한 이차 오염을 회피한다.
도 18은 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 방법이며, 이는 스위핑 기계 시스템에 적용가능하다. 스위핑 기계 시스템은 청소 로봇 및 먼지 수집 버킷을 포함한다. 청소 로봇은 실제 상황에 따라, 먼지 수집 버킷과 통합되거나 별도로 설정될 수 있으며, 이는 여기서 구체적으로 제한되지 않는다. 이러한 실시예에서, 청소 로봇 및 먼지 수집 버킷은 별도로 배열된다. 청소 로봇의 먼지 박스가 먼지 및 잔해로 가득찰 때, 청소 로봇은 먼지 박스를 청소하기 위해 먼지 수집 버킷과 결합한다.
먼지 수집 버킷은 쉘, 쉘 내에 배열된 먼지 버킷, 먼지 박스 및 먼지 버킷을 연결하기 위한 공기 채널, 및 공기 채널과 연결된 먼지 추출 팬을 포함한다. 먼지 추출 팬은 먼지 박스 내의 먼지 및 잔해를 공기 채널을 통해 먼지 버킷내로 흡입하기 위해 작동하며, 이는 편리하고 빠르다. 먼지 수집 버킷은 또한 먼지 추출 팬과 전기적으로 연결된 마이크로프로세서를 포함한다. 사용자는 마이크로프로세서에서의 설정들을 통해 먼지 버킷을 제어할 수 있다. 방법은 적어도 이하를 포함한다:
단계 101, 먼지 박스를 청소하는데 필요한 청소 시간 임계치를 사전 설정한다.
일 실시예에서, 청소 시간 임계치는 고정 먼지 추출 시간이다. 즉, 고정 먼지 추출 시간이 설정된 후에, 먼지 추출 팬의 실제 작동 시간이 고정 먼지 추출 시간에 도달할 때, 먼지 추출 팬은 작동을 정지한다. 그러나, 이러한 설정 후에, 먼지 박스 내에 더 적은 먼지 및 잔해가 있으면, 먼지 추출 팬은 계속 작동되고 유휴로 실행될 것이며, 그것에 의해 소음을 발생시킨다. 따라서, 다른 실시예에서, 먼지 박스의 청소 시간 임계치를 사전 설정하기 전에, 먼지 박스의 용량 및 먼지 추출 팬의 작동 흐름이 우선 획득될 수 있다. 그 다음, 먼지 박스의 용량, 및 먼지 박스의 용량에 따라 획득되는 먼지 추출 팬의 평균 작동 흐름에 따르면, 먼지 박스의 이상적인 청소 시간이 계산된다. 그들 중에서, 먼지 추출 팬의 평균 작동 흐름은 먼지 박스의 용량에 따라 설정되거나, 센서에 의해 획득되며, 이는 여기서 구체적으로 제한되지 않고, 실제 상황에 따라 결정된다.
구체적으로, 이상적인 청소 시간은,
T_min=k*A/B이며;
여기서, k >=1이고 자연수이며, A는 먼지 박스의 용량이고, B는 먼지 추출 팬의 평균 작동 흐름이다.
이러한 설정의 목적은 먼지 추출 팬의 작동 흐름을 검출함으로써 먼지 박스 내에 먼지 및 잔해가 있는지를 결정하고, 그 다음 먼지 추출 팬을 계속을 작동하게 할지를 결정하는 것이다. 위에 언급된 바와 같이, 이러한 실시예에서, 센서는 공기 채널 내에 제공된다. 센서는 먼지 추출 팬의 평균 작동 흐름을 검출하기 위해 사용된다. 센서는 마이크로프로세서와 신호 연결된다. 이러한 실시예에서, 센서의 유형은 그것이 먼지 추출 팬의 작동 흐름을 검출하는 목적을 달성할 수 있는 한, 구체적으로 제한되지 않는다.
그 다음, 먼지 추출 팬의 클린업 작동 시간이 설정되고, 클린업 작동 시간은 이상적인 청소 시간보다 더 길다. 클린업 작동 시간은 먼지 박스의 청소 시간 임계치로서 설정된다. 여기서, 클린업 작동 시간은 이상적인 청소 시간의 N 배이며, 여기서 N은 양의 정수이고, 이는 실제 상황에 따라 설정되고, 여기서 구체적으로 제한되지 않는다. N은 1일 수 있거나, 임계치로서 설정될 수 있으며, 이는 실게 요구들에 따라 사용자에 의해 설정될 수 있다.
단계 102: 먼지 추출 팬을 시작하고, 먼지 추출 팬의 실제 작동 시간이 청소 시간 임계치에 도달하는지를 결정하다.
단계 103: 결정 결과에 따라 작동을 계속하거나 정지하기 위해 먼지 추출 팬을 제어하고; 실제 작동 시간이 청소 시간 임계치 이상이면, 마이크로프로세서는 작동을 정지하기 위해 먼지 추출 팬을 제어하고; 그렇지 않으면, 그것은 계속 작동하기 위해 먼지 추출 팬을 제어한다.
요컨대, 먼지 박스의 청소 시간 임계치를 설정함으로써, 먼지 추출 팬의 실제 작동 시간이 청소 시간 임계치에 도달할 때, 먼지 추출 팬은 턴 오프될 것이며, 이는 편리하고 지능적이다.
먼지 박스의 용량 및 먼지 추출 팬의 작동 흐름을 획득함으로써, 먼지 추출 팬의 이상적인 청소 시간은 둘의 비율에 따라 계산된다. 이상적인 청소 시간에 따르면, 먼지 추출 팬의 클린업 작동 시간이 설정되며, 이는 빠르고 먼지 추출 팬의 유휴를 회피할 수 있고, 그것에 의해 사용자 경험을 개선한다.
도 19는 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치이다. 장치는 적어도,
먼지 박스의 청소 시간 임계치를 사전 설정하도록 구성된 사전 설정 모듈(201);
먼지 추출 팬이 시작된 후에 먼지 추출 팬의 실제 작동 시간이 청소 시간 임계치에 도달하는지를 결정하도록 구성된 결정 모듈(202); 및
결정 결과에 따라 작동을 계속하거나 정지하기 위해 먼지 추출 팬을 제어하도록 구성된 제어 모듈(203)을 포함한다.
관련 상세들에 대해, 상기 방법 실시예들을 참조한다.
상기 실시예들에 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치가 먼지 박스를 청소할 때, 상기 기능 모듈들의 분할만이 예시를 위한 일 예로서 사용된다는 점이 주목되어야 한다. 실제 적용들에서, 위에 언급된 기능들은 필요에 따라 상이한 기능 모듈들에 할당될 수 있다. 즉, 청소 로봇의 먼지 박스의 청소 제어 장치의 내부 구조는 전술된 기능들의 전부 또는 일부를 완료하기 위해 상이한 기능 모듈들로 분할된다. 게다가, 상기 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치 및 청소 로봇의 먼지 박스의 청소 제어 방법은 동일한 개념에 속한다. 청소 제어 장치의 특정 구현 프로세스는 방법 실시예에서 상세화되며, 이는 여기서 반복되지 않을 것이다.
도 20은 본 출원의 일 실시예에 의해 제공되는 청소 로봇의 먼지 박스의 청소 제어 장치이다. 장치는 적어도 프로세서 1 및 메모리 2를 포함한다.
프로세서 1은 4-코어 프로세서, 8-코어 프로세서 등과 같은, 하나 이상의 처리 코어를 포함할 수 있다. 프로세서 1은 DSP(Digital Signal Processing), FPGA(Field-Programmable Gate Array), 및 PLA(Programmable Logic Array) 중에서 적어도 하나의 하드웨어 형태로 구현될 수 있다. 프로세서 1은 또한 메인 프로세서 및 코프로세서를 포함할 수 있다. 메인 프로세서는 웨이크업 상태에서 데이터를 처리하기 위한 프로세서이고, 또한 CPU(Central Processing Unit)로 칭해진다. 코프로세서는 스탠바이 상태에서 데이터를 처리하기 위한 저전력 프로세서이다.
메모리 2는 하나 이상의 컴퓨터 판독가능 저장 매체를 포함할 수 있다. 컴퓨터 판독가능 저장 매체는 비일시적일 수 있다. 메모리 2는 또한 고속 랜덤 액세스 메모리뿐만 아니라, 비휘발성 메모리, 예컨대 하나 이상의 디스크 저장 장치, 플래시 저장 장치들을 포함할 수 있다. 일부 실시예들에서, 메모리 2 내의 비일시적 컴퓨터 판독가능 저장 매체는 적어도 하나의 명령어를 저장하기 위해 사용된다. 적어도 하나의 명령어는 본 출원의 방법 실시예들에서 제공되는 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 프로세서 1에 의해 로딩되고 실행된다.
일부 실시예들에서, 청소 로봇의 먼지 박스의 청소 제어 장치는 선택적으로 주변 장치 포트 및 적어도 하나의 주변 장치를 더 포함할 수 있다. 프로세서 1, 메모리 2 및 주변 장치 포트는 버스 또는 신호 라인을 통해 연결될 수 있다. 각각의 주변 장치는 버스, 신호 라인 또는 회로 보드를 통해 주변 장치 포트에 연결될 수 있다. 예시적으로, 주변 장치들은 무선 주파수 회로들, 터치 스크린들, 오디오 회로들, 및 전원들 등을 포함하지만, 이들에 제한되지 않는다.
분명히, 청소 로봇의 먼지 박스의청소 제어 장치는 더 적거나 더 많은 구성요소들을 포함할 수 있으며, 이는 이러한 실시예에서 제한되지 않는다.
선택적으로, 본 출원은 컴퓨터 판독가능 저장 매체를 제공한다. 컴퓨터 판독가능 저장 매체는 그 안에 저장된 프로그램을 포함한다. 프로그램은 전술된 바와 같이 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 프로세서 1에 의해 실행된다.
선택적으로, 본 출원은 또한 컴퓨터 제품을 제공한다. 컴퓨터 제품은 컴퓨터 판독가능 저장 매체를 포함한다. 프로그램은 컴퓨터 판독가능 저장 매체에 저장된다. 프로그램은 상기 방법 실시예들에 따른 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 프로세서 1에 의해 로딩되고 실행된다.
전술된 실시예들의 기술적 특징들은 임의로 조합될 수 있다. 설명을 단순화하기 위해, 상기 실시예들에서의 기술적 특징들의 모든 가능한 조합들은 설명되지 않는다. 그러나, 이들 기술적 특징들의 조합에 어떠한 모순도 없는 한, 그들은 본 명세서에서의 설명의 범위 내에 있는 것으로 간주되어야 한다.
위에 언급된 실시예들은 본 출원의 수개의 실시예들만을 나타내고, 그의 설명들은 상대적으로 구체적이고 상세화되지만, 특허 출원의 범위에 대한 제한으로서 해석되지 않아야 한다. 통상의 기술자들을 위해, 본 출원의 개념으로부터 벗어나지 않고, 수개의 수정들 및 개선들이 이루어질 수 있으며, 이는 본 출원의 보호 범위에 모두 속한다는 점이 주목되어야 한다. 따라서, 본 출원의 보호 범위는 첨부된 청구항들을 조건으로 해야 한다.
Claims (49)
- 지능형 청소 시스템으로서, 청소 로봇 및 상기 청소 로봇과 결합하도록 구성된 유지 스테이션을 포함하며, 상기 유지 스테이션은,
먼지 추출 포트 및 공기 배출 포트가 제공된 제1 쉘;
상기 제1 쉘 상에 배열된 제1 팬으로서, 상기 제1 팬의 공기 배출 단부 및 공기 흡입 단부는 상기 공기 배출 포트 및 상기 먼지 추출 포트와 각각 연통하는 제1 팬; 및
상기 제1 쉘 상에 배치되고 상기 청소 로봇을 충전하도록 구성된 충전 어셈블리를 포함하고;
상기 청소 로봇은,
먼지 흡입 포트, 먼지 유출구 포트 및 공기 송풍 포트가 제공된 제2 쉘로서; 상기 먼지 유출구 포트 및 상기 공기 송풍 포트는 상기 제2 쉘의 반대 단부들에 배열되고; 상기 먼지 유출구 포트는 상기 먼지 추출 포트와 결합하도록 구성되고, 상기 공기 송풍 포트는 상기 공기 배출 포트와 결합하도록 구성된 제2 쉘; 및
상기 제2 쉘 상에 배열되어 상기 청소 로봇을 구동하여 이동시키고 청소하는 작동 어셈블리를 포함하는, 지능형 청소 시스템. - 제1항에 있어서, 상기 제2 쉘은 하단 표면을 갖고; 상기 먼지 유출구 포트 및 상기 공기 흐름 포트는 상기 하단 표면의 반대 단부들에 각각 배열되는, 지능형 청소 시스템.
- 제2항에 있어서, 상기 하단 표면은 제1 하단 표면 및 제2 하단 표면을 포함하고; 상기 제2 하단 표면의 높이는 상기 청소 로봇의 수직 방향으로 상기 제1 하단 표면의 높이보다 더 높고; 상기 먼지 유출구 포트 및 상기 공기 흐름 포트는 상기 제1 하단 표면 상에 배열되고, 상기 먼지 흡입 포트는 상기 제2 하단 표면 상에 배열되는, 지능형 청소 시스템.
- 제1항에 있어서, 공기 유입구 밸브는 상기 공기 흐름 포트에 제공되고; 상기 청소 로봇이 작동 상태에 있을 때, 상기 공기 유입구 밸브는 상기 공기 흐름 포트를 폐쇄하고; 상기 청소 로봇이 상기 유지 스테이션과 결합될 때, 상기 공기 유입구 밸브는 상기 공기 흐름 포트를 개방하여, 상기 공기 흐름 포트는 상기 공기 배출 포트와 연통하는, 지능형 청소 시스템.
- 제4항에 있어서, 먼지 배출 밸브는 상기 먼지 유출구 포트에 제공되고; 상기 청소 로봇이 상기 작동 상태에 있을 때, 상기 먼지 배출 밸브는 상기 먼지 유출구 포트를 폐쇄하고; 상기 청소 로봇이 상기 유지 스테이션과 결합될 때, 상기 먼지 배출 밸브는 상기 먼지 유출구 포트를 개방하여, 상기 먼지 유출구 포트는 상기 먼지 추출 포트와 연통하는, 지능형 청소 시스템.
- 제1항에 있어서, 상기 제2 쉘은 수용 공간을 갖고; 상기 청소 로봇이 작동 상태에 있을 때, 상기 수용 공간은 부압 상태에 있는, 지능형 청소 시스템.
- 제6항에 있어서, 상기 작동 어셈블리는 상기 먼지 흡입 포트에 배치된 지면 브러시 어셈블리, 상기 지면 브러시 어셈블리를 회전시키기 위한 구동 어셈블리, 상기 청소 로봇을 이동시키기 위한 이동 어셈블리, 및 부압 상태에서 수용 공간을 이루기 위한 제2 팬을 포함하는, 지능형 청소 시스템.
- 제7항에 있어서, 상기 작동 어셈블리는 상기 제2 팬과 상기 수용 공간 사이에 배열되는 필터를 더 포함하고; 상기 청소 로봇이 상기 작동 상태에 있을 때, 먼지 운반 기류는 상기 먼지 흡입 포트로부터 상기 수용 공간으로 진입하고, 상기 필터를 통과한 후에 상기 제2 팬에 진입하는, 지능형 청소 시스템.
- 제1항에 있어서, 상기 유지 스테이션은 상기 제2 쉘로부터 추출되는 먼지를 저장하기 위한 먼지 저장 박스, 및 상기 먼지 저장 박스 및 상기 먼지 추출 포트와 연통하는 먼지 추출 채널을 더 포함하는, 지능형 청소 시스템.
- 제1항에 있어서, 상기 제1 팬의 공기 배출 단부는 아크 형상 공기 채널 또는 경사 공기 채널을 통해 상기 공기 배출 포트와 연통하는, 지능형 청소 시스템.
- 지능형 청소 시스템으로서, 청소 로봇 및 상기 청소 로봇과 결합하도록 구성된 유지 스테이션을 포함하며, 상기 유지 스테이션은,
먼지 추출 포트가 제공된 제1 쉘;
상기 제1 쉘 상에 배열된 제1 팬으로서, 상기 제1 팬의 공기 흡입 단부는 상기 청소 로봇으로부터 먼지를 추출하는데 사용되기 위해 상기 먼지 추출 포트와 연통하는 제1 팬;
상기 제1 쉘 내에 제공된 캐비티로서, 상기 캐비티는 먼지 추출 채널을 통해 상기 먼지 추출 포트와 연통하며, 살균 장치는 상기 먼지 추출 채널 및/또는 상기 캐비티 내에 제공된 캐비티; 및
상기 제1 쉘 상에 배치되고 상기 청소 로봇을 충전하도록 구성된 충전 어셈블리를 포함하고;
상기 청소 로봇은,
먼지 흡입 포트 및 먼지 유출구 포트가 제공된 제2 쉘로서, 상기 먼지 유출구 포트는 상기 먼지 추출 포트와 결합하도록 구성된 제2 쉘; 및
상기 제2 쉘 상에 배열되어 상기 청소 로봇을 구동하여 이동시키고 청소하는 작동 어셈블리를 포함하는, 지능형 청소 시스템. - 제11항에 있어서, 상기 제1 쉘에는 공기 배출 포트가 더 제공되고, 상기 제1 팬의 공기 배출 단부는 상기 공기 배출 포트와 연통하고; 상기 제2 쉘에는 상기 공기 배출 포트와 결합되는 공기 흐름 포트가 제공되는, 지능형 청소 시스템.
- 제12항에 있어서, 상기 제2 쉘은 하단 표면을 갖고; 상기 먼지 유출구 포트 및 상기 공기 흐름 포트는 상기 하단 표면의 반대 단부들에 각각 배열되는, 지능형 청소 시스템.
- 제13항에 있어서, 상기 하단 표면은 제1 하단 표면 및 제2 하단 표면을 포함하고; 상기 제2 하단 표면의 높이는 상기 청소 로봇의 수직 방향으로 상기 제1 하단 표면의 높이보다 더 높고; 상기 먼지 유출구 포트 및 상기 공기 흐름 포트는 상기 제1 하단 표면 상에 배열되고, 상기 먼지 흡입 포트는 상기 제2 하단 표면 상에 배열되는, 지능형 청소 시스템.
- 제12항에 있어서, 공기 유입구 밸브는 상기 공기 흐름 포트에 제공되고; 상기 청소 로봇이 작동 상태에 있을 때, 상기 공기 유입구 밸브는 상기 공기 흐름 포트를 폐쇄하고; 상기 청소 로봇이 상기 유지 스테이션과 결합될 때, 상기 공기 유입구 밸브는 상기 공기 흐름 포트를 개방하여, 상기 공기 흐름 포트는 상기 공기 배출 포트와 연통하는, 지능형 청소 시스템.
- 제15항에 있어서, 먼지 배출 밸브는 상기 먼지 유출구 포트에 제공되고; 상기 청소 로봇이 상기 작동 상태에 있을 때, 상기 먼지 배출 밸브는 상기 먼지 유출구 포트를 폐쇄하고; 상기 청소 로봇이 상기 유지 스테이션과 결합될 때, 상기 먼지 배출 밸브는 상기 먼지 유출구 포트를 개방하여, 상기 먼지 유출구 포트는 상기 먼지 추출 포트와 연통하는, 지능형 청소 시스템.
- 제11항에 있어서, 상기 제2 쉘은 수용 공간을 갖고; 상기 청소 로봇이 작동 상태에 있을 때, 상기 수용 공간은 부압 상태에 있는, 지능형 청소 시스템.
- 제17항에 있어서, 상기 작동 어셈블리는 상기 먼지 흡입 포트에 배치된 지면 브러시 어셈블리, 상기 지면 브러시 어셈블리를 회전시키기 위한 구동 어셈블리, 상기 청소 로봇을 이동시키기 위한 이동 어셈블리, 및 부압 상태에서 수용 공간을 이루기 위한 제2 팬을 포함하는, 지능형 청소 시스템.
- 제18항에 있어서, 상기 작동 어셈블리는 상기 제2 팬과 상기 수용 공간 사이에 배열되는 필터를 더 포함하고; 상기 청소 로봇이 상기 작동 상태에 있을 때, 먼지 운반 기류는 상기 먼지 흡입 포트로부터 상기 수용 공간으로 진입하고, 상기 필터를 통과한 후에 상기 제2 팬에 진입하는, 지능형 청소 시스템.
- 제11항에 있어서, 먼지 검출 장치는 상기 먼지 추출 채널 내에 제공되고, 상기 먼지 검출 장치는 센서 및 마이크로프로세서를 포함하고, 상기 센서는 상기 마이크로프로세서와 전기적으로 연결되고, 상기 마이크로프로세서는 상기 제1 팬에 전기적으로 연결되는, 지능형 청소 시스템.
- 먼지 수집 버킷의 먼지 충만 검출 시스템으로서,
센서 및/또는 검출 회로를 포함하는 취득 유닛으로서, 상기 센서 및/또는 상기 검출 회로는 상기 먼지 수집 버킷의 파라미터를 검출하도록 구성된 취득 유닛;
상기 파라미터를 수신하고 상기 파라미터가 사전 설정된 임계치를 초과하는지를 결정하도록 구성된 처리 유닛; 및
사용자에게 관련 동작을 수행할 것을 상기시키도록 구성된 알람 유닛을 포함하며;
상기 처리 유닛은 결정 결과에 따라 표시 정보를 발송하라고 상기 알람 유닛에 명령하는, 먼지 수집 버킷의 먼지 충만 검출 시스템. - 제21항에 있어서, 상기 먼지 수집 버킷이 작동하고 있을 때, 상기 파라미터는 전류의 파라미터 및/또는 상기 먼지 수집 버킷의 먼지 추출 모터의 회전 속도의 파라미터인, 먼지 수집 버킷의 먼지 충만 검출 시스템.
- 제21항에 있어서, 상기 먼지 수집 버킷이 작동하고 있을 때, 상기 파라미터는 상기 먼지 수집 버킷의 먼지 버킷 내의 공기 압력의 파라미터인, 먼지 수집 버킷의 먼지 충만 검출 시스템.
- 제21항에 있어서, 상기 먼지 수집 버킷이 작동하고 있을 때, 상기 파라미터는 상기 먼지 수집 버킷의 먼지 버킷의 중량의 파라미터인, 먼지 수집 버킷의 먼지 충만 검출 시스템.
- 제21항에 있어서, 상기 파라미터가 상기 사전 설정된 임계치를 초과할 때, 상기 알람 유닛은 상기 사용자에게 상기 먼지 수집 버킷을 청소할 것을 상기시키기 위해 경보하는, 먼지 수집 버킷의 먼지 충만 검출 시스템.
- 제21항에 있어서, 상기 먼지 수집 버킷이 작동하고 있을 때, 상기 파라미터는 상기 먼지 수집 버킷의 먼지 버킷의 위치내 시간의 파라미터인, 먼지 수집 버킷의 먼지 충만 검출 시스템.
- 제21항에 있어서, 상기 먼지 수집 버킷이 작동하고 있을 때, 상기 파라미터는 상기 먼지 수집 버킷의 먼지 추출 모터의 작동 시간들의 파라미터인, 먼지 수집 버킷의 먼지 충만 검출 시스템.
- 제21항에 있어서, 상기 먼지 수집 버킷이 동작중일 때, 상기 파라미터는 상기 먼지 수집 버킷의 먼지 버킷의 위치내 시간 내의 먼지 추출 모터의 작동 시간들의 파라미터인, 먼지 수집 버킷의 먼지 충만 검출 시스템.
- 먼지 수집 버킷의 먼지 충만 검출 방법으로서,
상기 먼지 수집 버킷의 파라미터를 검출하는 단계;
상기 파라미터가 사전 설정된 임계치를 초과하는지를 결정하는 단계; 및
결정 결과에 따라 표시 정보를 송신하는 단계를 포함하고, 상기 표시 정보는 알람 정보인, 먼지 수집 버킷의 먼지 충만 검출 방법. - 제29항에 있어서,
상기 파라미터가 상기 사전 설정된 임계치를 초과할 때 사용자에게 상기 먼지 수집 버킷을 청소할 것을 상기시키기 위해 표시 메시지를 송신하는 단계를 더 포함하는, 먼지 수집 버킷의 먼지 충만 검출 방법. - 청소 로봇의 먼지 박스의 청소 제어 방법으로서, 상기 청소 로봇은 유지 스테이션과 결합하도록 구성되고, 상기 유지 스테이션은 제1 팬을 갖고, 상기 청소 로봇은 제2 팬을 갖고, 상기 방법은,
충전을 위해 상기 청소 로봇을 상기 유지 스테이션과 결합시키는 단계;
상기 제2 팬을 우선 시작하고, 그 다음 상기 제1 팬을 시작하여 상기 청소 로봇으로부터 먼지를 추출하거나; 상기 제1 팬 및 상기 제2 팬을 동시에 시작하는 단계; 및
먼지 추출이 완료될 때, 상기 제1 팬을 우선 턴 오프하고, 그 다음 상기 제2 팬을 턴 오프하거나; 상기 제1 팬 및 상기 제2 팬을 동시에 턴 오프하는 단계를 포함하는, 청소 로봇의 먼지 박스의 청소 제어 방법. - 제31항에 있어서,
여전히 상기 유지 스테이션 내로 인출되는 먼지가 있는지를 결정하고; 그렇지 않으면, 상기 제1 팬을 턴 오프하고, 상기 먼지 추출이 완료되고; 예이면, 상기 먼지 추출을 계속하는 단계를 더 포함하는, 청소 로봇의 먼지 박스의 청소 제어 방법. - 제32항에 있어서, 상기 제1 팬의 공기 배출 단부는 공기 채널을 통해 상기 청소 로봇과 연통하며, 상기 제1 팬의 공기 흡입 단부는 먼지 추출 채널을 통해 상기 청소 로봇과 연통하고;
먼지 검출 장치는 여전히 상기 먼지 추출 채널 내로 인출되는 먼지가 있는지를 검출하기 위해 상기 먼지 추출 채널 내에 배열되는, 청소 로봇의 먼지 박스의 청소 제어 방법. - 제31항에 있어서,
상기 먼지 추출을 수행하기 전에, 상기 먼지 박스의 청소 시간 임계치를 사전 설정하는 단계; 상기 제1 팬의 실제 작동 시간이 상기 청소 시간 임계치에 도달하는지를 결정하는 단계; 및 결정 결과에 따라 작동을 계속하거나 정지하기 위해 상기 제1 팬을 제어하는 단계를 더 포함하는, 청소 로봇의 먼지 박스의 청소 제어 방법. - 제34항에 있어서,
상기 먼지 박스의 청소 시간 임계치를 사전 설정하기 전에, 상기 먼지 박스의 용량 및 상기 제1 팬의 작동 흐름을 획득하는 단계; 및
상기 먼지 박스의 용량 및 상기 제1 팬의 작동 흐름에 따라 상기 먼지 박스의 이상적인 청소 시간을 계산하는 단계를 더 포함하며; 상기 이상적인 청소 시간은,
T_min=A/B이고;
여기서, A는 상기 먼지 박스의 용량이고, B는 상기 제1 팬의 작동 흐름인, 청소 로봇의 먼지 박스의 청소 제어 방법. - 제35항에 있어서,
상기 제1 팬의 클린업 작동 시간을 설정하는 단계로서, 상기 클린업 작동 시간은 상기 이상적인 청소 시간보다 더 긴 단계; 및
상기 클린업 작동 시간을 상기 먼지 박스의 청소 시간 임계치로서 설정하는 단계를 더 포함하며; 상기 클린업 작동 시간은 이상적인 청소 시간의 N 배이고, N은 양의 정수인, 청소 로봇의 먼지 박스의 청소 제어 방법. - 제36항에 있어서, 상기 제1 팬은 공기 채널을 통해 상기 먼지 박스와 연결되고, 흐름 센서는 상기 공기 채널 내에 배치되고, 상기 흐름 센서는 상기 제1 팬의 작동 흐름을 검출하도록 구성되는, 청소 로봇의 먼지 박스의 청소 제어 방법.
- 청소 로봇의 먼지 박스의 청소 제어 장치로서, 상기 청소 로봇은 유지 스테이션과 결합하도록 구성되고, 상기 유지 스테이션은 제1 팬을 갖고, 상기 청소 로봇은 제2 팬을 갖고, 상기 장치는,
상기 먼지 박스의 청소 시간 임계치를 사전 설정하도록 구성된 사전 설정 모듈;
여전히 상기 유지 스테이션 내로 인출되는 먼저가 있는지를 결정하도록 구성되거나; 상기 제1 팬의 실제 작동 시간이 상기 제1 팬을 시작한 후에 상기 청소 시간 임계치에 도달했는지를 결정하도록 구성된 결정 모듈; 및
결정 결과에 따라 상기 제1 팬을 제어하도록 구성되거나; 작동을 계속하거나 정지하기 위해 상기 제1 팬 및 상기 제2 팬을 제어하도록 구성된 제어 모듈을 포함하는, 청소 로봇의 먼지 박스의 청소 제어 장치. - 청소 로봇의 먼지 박스의 청소 제어 장치로서, 상기 장치는 프로세서 및 메모리를 포함하고, 프로그램은 상기 메모리에 저장되고, 상기 프로그램은 제31항 내지 제37항 중 어느 한 항에 따른 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 상기 프로세서에 의해 로딩되고 실행되는, 청소 로봇의 먼지 박스의 청소 제어 장치.
- 컴퓨터 판독가능 저장 매체로서, 상기 저장 매체에 저장된 프로그램을 포함하고; 상기 프로그램은 제31항 내지 제37항 중 어느 한 항에 따른 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 프로세서에 의해 실행되는, 컴퓨터 판독가능 저장 매체.
- 청소 로봇의 먼지 박스의 청소 제어 방법으로서, 상기 청소 로봇은 먼지 수집 버킷과 결합하도록 구성되고, 상기 청소 로봇은 먼지 박스를 갖고, 상기 먼지 수집 버킷은 먼지 추출 팬을 갖고, 상기 방법은,
상기 먼지 박스를 청소하는데 필요한 청소 시간 임계치를 사전 설정하는 단계;
상기 먼지 추출 팬을 시작하고, 상기 먼지 추출 팬의 실제 작동 시간이 상기 청소 시간 임계치에 도달하는지를 결정하는 단계; 및
결정 결과에 따라, 작동을 계속하거나 정지하기 위해 상기 먼지 추출 팬을 제어하는 단계를 포함하는, 청소 로봇의 먼지 박스의 청소 제어 방법. - 제41항에 있어서,
상기 먼지 박스를 청소하는데 필요한 청소 시간 임계치를 사전 설정하기 전에, 상기 먼지 박스의 용량을 획득하고, 상기 먼지 박스의 용량에 따라 상기 먼지 추출 팬의 평균 작동 흐름을 획득하는 단계; 및
상기 먼지 박스의 용량 및 상기 먼지 추출 팬의 평균 작동 흐름에 따라 상기 먼지 박스의 이상적인 청소 시간을 계산하는 단계를 더 포함하며; 상기 이상적인 청소 시간은,
T_min=k*A/B이며;
여기서 k >=1이고 자연수이며, A는 상기 먼지 박스의 용량이고, B는 상기 먼지 추출 팬의 평균 작동 흐름인, 청소 로봇의 먼지 박스의 청소 제어 방법. - 제42항에 있어서,
상기 먼지 추출 팬의 클린업 작동 시간을 설정하고, 상기 클린업 작동 시간은 상기 이상적인 청소 시간보다 더 긴 단계; 및
상기 클린업 작동 시간을 상기 먼지 박스를 청소하는데 필요한 청소 시간 임계치로서 설정하는 단계를 더 포함하는, 청소 로봇의 먼지 박스의 청소 제어 방법. - 제43항에 있어서, 상기 클린업 작동 시간은 상기 이상적인 청소 시간의 N 배이며, 여기서 N은 양의 정수인, 청소 로봇의 먼지 박스의 청소 제어 방법.
- 제42항에 있어서, 상기 먼지 추출 팬은 공기 채널을 통해 상기 먼지 박스와 연결되고, 센서는 상기 공기 채널 내에 배치되고;
상기 센서는 상기 먼지 추출 팬의 평균 작동 흐름을 검출하도록 구성되는, 청소 로봇의 먼지 박스의 청소 제어 방법. - 제41항에 있어서, 상기 청소 시간 임계치는 고정 먼지 추출 시간인, 청소 로봇의 먼지 박스의 청소 제어 방법.
- 청소 로봇의 먼지 박스의 청소 제어 장치로서, 상기 장치는,
상기 먼지 박스의 청소 시간 임계치를 사전 설정하도록 구성된 사전 설정 모듈;
상기 먼지 추출 팬이 시작된 후에 먼지 추출 팬의 실제 작동 시간이 상기 청소 시간 임계치에 도달하는지를 결정하도록 구성된 결정 모듈; 및
결정 결과에 따라 작동을 계속하거나 정지하기 위해 상기 먼지 추출 팬을 제어하도록 구성된 제어 모듈을 포함하는, 청소 로봇의 먼지 박스의 청소 제어 장치. - 청소 로봇의 먼지 박스의 청소 제어 장치로서, 상기 장치는 프로세서 및 메모리를 포함하고, 프로그램은 상기 메모리에 저장되고, 상기 프로그램은 제41항 내지 제46항 중 어느 한 항에 따른 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 상기 프로세서에 의해 로딩되고 실행되는, 청소 로봇의 먼지 박스의 청소 제어 장치.
- 컴퓨터 판독가능 저장 매체로서, 상기 저장 매체에 저장된 프로그램을 포함하고; 상기 프로그램은 제41항 내지 제46항 중 어느 한 항에 따른 청소 로봇의 먼지 박스의 청소 제어 방법을 구현하기 위해 프로세서에 의해 실행되는, 컴퓨터 판독가능 저장 매체.
Applications Claiming Priority (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010928370.7 | 2020-09-07 | ||
| CN202010928363.7 | 2020-09-07 | ||
| CN202021928732.4 | 2020-09-07 | ||
| CN202010929134.7A CN112013923A (zh) | 2020-09-07 | 2020-09-07 | 集尘桶的尘满检测系统及方法 |
| CN202021928734.3 | 2020-09-07 | ||
| CN202021928732.4U CN214208244U (zh) | 2020-09-07 | 2020-09-07 | 智能清洁系统 |
| CN202010929134.7 | 2020-09-07 | ||
| CN202021928734.3U CN213588175U (zh) | 2020-09-07 | 2020-09-07 | 智能清洁系统 |
| CN202010928363.7A CN112022007B (zh) | 2020-09-07 | 2020-09-07 | 扫地机器人的尘盒清洁控制方法、装置及存储介质 |
| CN202010928370.7A CN112006613B (zh) | 2020-09-07 | 2020-09-07 | 扫地机器人的尘盒清洁控制方法、装置及存储介质 |
| PCT/CN2021/115247 WO2022048510A1 (zh) | 2020-09-07 | 2021-08-30 | 智能清洁系统 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20230058671A true KR20230058671A (ko) | 2023-05-03 |
Family
ID=80491596
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020237010487A KR20230058671A (ko) | 2020-09-07 | 2021-08-30 | 지능형 청소 시스템 |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP4212084A4 (ko) |
| JP (1) | JP2023539915A (ko) |
| KR (1) | KR20230058671A (ko) |
| AU (1) | AU2021338322A1 (ko) |
| CA (1) | CA3191985A1 (ko) |
| WO (1) | WO2022048510A1 (ko) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114947607B (zh) * | 2022-04-19 | 2024-02-23 | 安克创新科技股份有限公司 | 尘盒尘满检测方法、装置、吸尘装置和自动清洁设备 |
| CN115177179A (zh) * | 2022-05-24 | 2022-10-14 | 上海七十迈数字科技有限公司 | 一种清洁设备的清扫方法、设备及介质 |
| WO2023234639A1 (ko) * | 2022-05-31 | 2023-12-07 | 삼성전자 주식회사 | 스테이션 장치 및 스테이션 장치의 동작 방법 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101290095B1 (ko) * | 2006-04-26 | 2013-08-01 | 삼성전자주식회사 | 로봇청소기와 도킹 스테이션을 구비하는 로봇청소기 시스템 |
| KR101483541B1 (ko) * | 2010-07-15 | 2015-01-19 | 삼성전자주식회사 | 로봇청소기, 메인터넌스 스테이션 그리고 이들을 가지는 청소시스템 |
| US20130305481A1 (en) * | 2012-05-15 | 2013-11-21 | Samsung Electronics Co., Ltd. | Maintenance system and cleaning system having the same |
| DE102014100358B4 (de) * | 2014-01-14 | 2023-01-05 | Miele & Cie. Kg | Selbstfahrendes Reinigungsgerät |
| US9462920B1 (en) * | 2015-06-25 | 2016-10-11 | Irobot Corporation | Evacuation station |
| WO2020047303A1 (en) * | 2018-08-30 | 2020-03-05 | Irobot Corporation | Control of evacuation stations |
| CN111466831B (zh) * | 2019-01-23 | 2023-09-01 | 北京奇虎科技有限公司 | 扫地机器人尘盒状态检测方法、装置、尘盒和扫地机器人 |
| CN112022007B (zh) * | 2020-09-07 | 2022-10-21 | 追觅创新科技(苏州)有限公司 | 扫地机器人的尘盒清洁控制方法、装置及存储介质 |
| CN112006613B (zh) * | 2020-09-07 | 2022-06-21 | 追觅创新科技(苏州)有限公司 | 扫地机器人的尘盒清洁控制方法、装置及存储介质 |
| CN112013923A (zh) * | 2020-09-07 | 2020-12-01 | 追创科技(苏州)有限公司 | 集尘桶的尘满检测系统及方法 |
-
2021
- 2021-08-30 KR KR1020237010487A patent/KR20230058671A/ko unknown
- 2021-08-30 CA CA3191985A patent/CA3191985A1/en active Pending
- 2021-08-30 JP JP2023515172A patent/JP2023539915A/ja active Pending
- 2021-08-30 AU AU2021338322A patent/AU2021338322A1/en active Pending
- 2021-08-30 EP EP21863575.3A patent/EP4212084A4/en active Pending
- 2021-08-30 WO PCT/CN2021/115247 patent/WO2022048510A1/zh unknown
Also Published As
| Publication number | Publication date |
|---|---|
| EP4212084A1 (en) | 2023-07-19 |
| EP4212084A4 (en) | 2024-03-06 |
| AU2021338322A1 (en) | 2023-04-13 |
| CA3191985A1 (en) | 2022-03-10 |
| WO2022048510A1 (zh) | 2022-03-10 |
| JP2023539915A (ja) | 2023-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20230058671A (ko) | 지능형 청소 시스템 | |
| CN112022007B (zh) | 扫地机器人的尘盒清洁控制方法、装置及存储介质 | |
| KR102312661B1 (ko) | 청소 로봇 | |
| US11910973B2 (en) | Debris collecting base station, cleaning robot and cleaning system | |
| CN204091882U (zh) | 一种吸尘器 | |
| CN112013923A (zh) | 集尘桶的尘满检测系统及方法 | |
| KR20050040122A (ko) | 먼지 자동제거기능을 포함하는 로봇청소기 | |
| US8223029B2 (en) | Method for controlling cleaning device | |
| CN112006613B (zh) | 扫地机器人的尘盒清洁控制方法、装置及存储介质 | |
| CN110856632A (zh) | 一种集尘设备的信息处理方法、系统及存储介质 | |
| CN113606669A (zh) | 一种自清洁空调和及其除尘控制方法及装置 | |
| CN103142191A (zh) | 排风口设有旋风过滤装置的卧式吸尘器 | |
| WO2021120263A1 (zh) | 一种垃圾桶式吸尘器的控制方法、电子设备及存储介质 | |
| WO2021120257A1 (zh) | 一种吸尘器的倾倒检测系统及吸尘器 | |
| CN212326285U (zh) | 一种适用于吸尘器的除尘袋结构 | |
| CN208827786U (zh) | 柜式吸尘器及自助洗车机 | |
| CN112369985A (zh) | 一种灰尘清理方法及清洁设备 | |
| CN117322797A (zh) | 适用于吸尘器的集尘装置及其操作方法 | |
| CN215687466U (zh) | 垃圾收集装置、扫地机器人充电桩及清洁系统 | |
| KR100589793B1 (ko) | 로봇 청소기의 수거통 청소방법 | |
| CN214595702U (zh) | 一种家用中央吸尘器 | |
| CN215937199U (zh) | 一种可循环吸尘的除尘系统及设备 | |
| CN114176455B (zh) | 一种具有分类功能的智能吸尘装置 | |
| CN219763237U (zh) | 一种拖地机的自动清理设备 | |
| WO2022227281A1 (zh) | 集尘桩、清洁机器人及清洁系统 |