KR20200055487A - 반도체 소자 픽업 장치 - Google Patents
반도체 소자 픽업 장치 Download PDFInfo
- Publication number
- KR20200055487A KR20200055487A KR1020180139187A KR20180139187A KR20200055487A KR 20200055487 A KR20200055487 A KR 20200055487A KR 1020180139187 A KR1020180139187 A KR 1020180139187A KR 20180139187 A KR20180139187 A KR 20180139187A KR 20200055487 A KR20200055487 A KR 20200055487A
- Authority
- KR
- South Korea
- Prior art keywords
- vacuum
- picker
- measuring
- vacuum picker
- measuring member
- Prior art date
Links
Images


Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67712—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations the substrate being handled substantially vertically
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67721—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations the substrates to be conveyed not being semiconductor wafers or large planar substrates, e.g. chips, lead frames
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
반도체 소자 픽업 장치가 개시된다. 상기 장치는, 진공압을 이용하여 반도체 소자를 픽업하기 위한 진공 피커와, 상기 진공 피커를 수직 방향으로 이동시키기 위한 수직 구동부와, 상기 진공 피커 아래에 배치되며 상기 진공 피커 내부의 상기 진공압을 측정하기 위한 측정 부재와, 상기 측정 부재의 아래에 배치되며 자기력을 이용하여 상기 측정 부재에 하방으로 하중을 인가하기 위한 하중 인가 부재와, 상기 측정 부재를 픽업하도록 상기 진공 피커와 상기 수직 구동부의 동작을 제어하며 상기 측정 부재의 픽업 여부에 따라 상기 진공 피커 내부의 상기 진공압이 허용 범위를 만족하는지 여부를 판단하는 제어 유닛을 포함한다.
Description
본 발명의 실시예들은 반도체 소자 픽업 장치에 관한 것이다. 보다 상세하게는, 반도체 제조 공정에서 반도체 소자들을 이송하기 위해 진공압을 이용하여 상기 반도체 소자들을 픽업하기 위한 장치에 관한 것이다.
일반적으로 반도체 소자들은 일련의 제조 공정들을 반복적으로 수행함으로써 반도체 기판으로서 사용되는 실리콘 웨이퍼 상에 형성될 수 있다. 상기 반도체 소자들은 다이싱 공정을 통해 개별화될 수 있으며, 본딩 공정을 통해 리드 프레임 또는 인쇄회로기판 상에 장착될 수 있다. 상기 본딩 공정에 의해 제조된 반도체 스트립에 대하여 절단 및 분류 공정을 수행함으로써 반도체 소자들이 완성될 수 있다.
상기와 같이 제조된 반도체 소자들은 전기적인 특성 검사를 통해 양품 또는 불량품으로 판정될 수 있다. 상기 전기적인 특성 검사에는 상기 반도체 소자들을 핸들링하는 테스트 핸들러와 상기 반도체 소자들을 전기적으로 검사하기 위한 테스터가 사용될 수 있다.
한편, 상기 절단 및 분류 공정에서 개별화된 반도체 소자들은 커스터머 트레이에 수납될 수 있으며, 상기 전기적인 특성 검사 공정에서 반도체 소자들은 상기 커스터머 트레이로부터 테스트 트레이로 이송될 수 있다. 상기와 같이 반도체 소자들이 테스트 트레이로 이송된 상태에서 상기 전기적인 특성 검사 공정이 수행될 수 있으며, 검사 결과에 따라 양품 또는 불량품으로 분류될 수 있다.
상기 절단 및 분류 공정과 전기적인 검사 공정에서 상기 반도체 소자들은 복수의 피커들에 의해 이송될 수 있다. 상기 피커들은 진공압을 이용하여 상기 반도체 소자들을 진공 흡착하기 위한 콜릿을 각각 구비할 수 있다. 그러나, 장시간 사용에 따른 상기 콜릿의 마모에 의해 상기 반도체 소자들의 픽업이 정상적으로 수행되지 않을 수 있다. 특히, 상기 콜릿이 마모되는 경우 상기 진공 피커 내부의 진공압이 불충분할 수 있으며 이에 따라 상기 반도체 소자들의 픽업이 정상적으로 수행되지 않거나 상기 반도체 소자들의 이송 도중에 상기 반도체 소자들이 낙하되는 문제점이 발생될 수 있다.
본 발명의 실시예들은 반도체 소자의 픽업을 위한 진공 피커의 내부 진공압이 허용 범위를 만족하는지 여부를 판단할 수 있는 반도체 소자 픽업 장치를 제공하는데 그 목적이 있다.
본 발명의 일부 실시예들에 따르면, 반도체 소자 픽업 장치는, 진공압을 이용하여 반도체 소자를 픽업하기 위한 진공 피커와, 상기 진공 피커를 수직 방향으로 이동시키기 위한 수직 구동부와, 상기 진공 피커 아래에 배치되며 상기 진공 피커 내부의 상기 진공압을 측정하기 위한 측정 부재와, 상기 측정 부재의 아래에 배치되며 자기력을 이용하여 상기 측정 부재에 하방으로 하중을 인가하기 위한 하중 인가 부재와, 상기 측정 부재를 픽업하도록 상기 진공 피커와 상기 수직 구동부의 동작을 제어하며 상기 측정 부재의 픽업 여부에 따라 상기 진공 피커 내부의 상기 진공압이 허용 범위를 만족하는지 여부를 판단하는 제어 유닛을 포함할 수 있다.
본 발명의 일부 실시예들에 따르면, 상기 측정 부재 및 상기 하중 인가 부재 중 적어도 하나는 영구자석을 포함할 수 있다.
본 발명의 일부 실시예들에 따르면, 상기 반도체 소자 픽업 장치는, 상기 측정 부재 및 상기 하중 인가 부재가 수납되는 하우징을 더 포함할 수 있으며, 상기 측정 부재는 상기 하우징 내에서 수직 방향으로 이동 가능하도록 구성될 수 있다.
본 발명의 일부 실시예들에 따르면, 상기 제어 유닛은, 상기 측정 부재를 진공 흡착하기 위하여 상기 진공 피커를 하강시키고 이어서 상기 측정 부재를 기 설정된 측정 높이로 픽업하기 위하여 상기 진공 피커를 상승시키도록 상기 수직 구동부의 동작을 제어하는 피커 제어부와, 상기 측정 부재가 픽업된 후 상기 진공 피커 내부의 상기 진공압을 측정하기 위한 압력 측정부를 포함할 수 있다.
본 발명의 일부 실시예들에 따르면, 상기 제어 유닛은, 진공 배관을 통해 상기 진공 피커와 연결되며 상기 진공 피커에 진공을 제공하기 위한 진공 제공부를 더 포함할 수 있으며, 상기 압력 측정부는 상기 진공 배관 또는 상기 진공 제공부에 연결될 수 있다.
상술한 바와 같은 본 발명의 실시예들에 따르면, 상기 진공 피커에 의해 상기 측정 부재가 픽업되는지 여부에 따라 상기 진공 피커 내부의 진공압이 허용 범위를 만족하는지 여부를 판단할 수 있다. 결과적으로, 상기 진공 피커에 구비되는 콜릿의 교체가 필요한지 여부를 즉시 판단할 수 있으며, 이를 통해 상기 반도체 소자의 픽업 불량을 크게 감소시킬 수 있다. 또한, 상기 측정 부재를 픽업한 상태에서 상기 진공 피커 내부의 진공압을 측정함으로써 상기 콜릿의 교체가 필요한 시기를 예측할 수 있으며, 이를 통해 보다 안정적으로 상기 진공 피커를 관리할 수 있다.
도 1은 본 발명의 일 실시예에 따른 반도체 소자 픽업 장치를 설명하기 위한 개략적인 구성도이다.
도 2 및 도 3은 도 1에 도시된 반도체 소자 픽업 장치의 동작을 설명하기 위한 개략도들이다.
도 2 및 도 3은 도 1에 도시된 반도체 소자 픽업 장치의 동작을 설명하기 위한 개략도들이다.
이하, 본 발명의 실시예들은 첨부 도면들을 참조하여 상세하게 설명된다. 그러나, 본 발명은 하기에서 설명되는 실시예들에 한정된 바와 같이 구성되어야만 하는 것은 아니며 이와 다른 여러 가지 형태로 구체화될 수 있을 것이다. 하기의 실시예들은 본 발명이 온전히 완성될 수 있도록 하기 위하여 제공된다기보다는 본 발명의 기술 분야에서 숙련된 당업자들에게 본 발명의 범위를 충분히 전달하기 위하여 제공된다.
본 발명의 실시예들에서 하나의 요소가 다른 하나의 요소 상에 배치되는 또는 연결되는 것으로 설명되는 경우 상기 요소는 상기 다른 하나의 요소 상에 직접 배치되거나 연결될 수도 있으며, 다른 요소들이 이들 사이에 개재될 수도 있다. 이와 다르게, 하나의 요소가 다른 하나의 요소 상에 직접 배치되거나 연결되는 것으로 설명되는 경우 그들 사이에는 또 다른 요소가 있을 수 없다. 다양한 요소들, 조성들, 영역들, 층들 및/또는 부분들과 같은 다양한 항목들을 설명하기 위하여 제1, 제2, 제3 등의 용어들이 사용될 수 있으나, 상기 항목들은 이들 용어들에 의하여 한정되지는 않을 것이다.
본 발명의 실시예들에서 사용된 전문 용어는 단지 특정 실시예들을 설명하기 위한 목적으로 사용되는 것이며, 본 발명을 한정하기 위한 것은 아니다. 또한, 달리 한정되지 않는 이상, 기술 및 과학 용어들을 포함하는 모든 용어들은 본 발명의 기술 분야에서 통상적인 지식을 갖는 당업자에게 이해될 수 있는 동일한 의미를 갖는다. 통상적인 사전들에서 한정되는 것들과 같은 상기 용어들은 관련 기술과 본 발명의 설명의 문맥에서 그들의 의미와 일치하는 의미를 갖는 것으로 해석될 것이며, 명확히 한정되지 않는 한 이상적으로 또는 과도하게 외형적인 직감으로 해석되지는 않을 것이다.
본 발명의 실시예들은 본 발명의 이상적인 실시예들의 개략적인 도해들을 참조하여 설명된다. 이에 따라, 상기 도해들의 형상들로부터의 변화들, 예를 들면, 제조 방법들 및/또는 허용 오차들의 변화는 충분히 예상될 수 있는 것들이다. 따라서, 본 발명의 실시예들은 도해로서 설명된 영역들의 특정 형상들에 한정된 바대로 설명되어지는 것은 아니라 형상들에서의 편차를 포함하는 것이며, 도면들에 설명된 요소들은 전적으로 개략적인 것이며 이들의 형상은 요소들의 정확한 형상을 설명하기 위한 것이 아니며 또한 본 발명의 범위를 한정하고자 하는 것도 아니다.
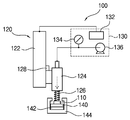
도 1은 본 발명의 일 실시예에 따른 반도체 소자 픽업 장치를 설명하기 위한 개략적인 구성도이다.
도 1을 참조하면, 본 발명의 일 실시예에 따른 반도체 소자 픽업 장치(100)는 절단 및 분류 공정 또는 전기적인 검사 공정에서 반도체 소자들(미도시)을 이송하기 위해 사용될 수 있다. 예를 들면, 상기 반도체 소자 픽업 장치(100)는 상기 절단 및 분류 공정에서 팔레트 테이블로부터 커스터머 트레이로 상기 반도체 소자들을 이송하기 위하여 또는 상기 전기적인 검사 공정에서 커스터머 트레이와 테스트 트레이 사이에서 상기 반도체 소자들을 이송하기 위해 사용될 수 있다.
본 발명의 일 실시예에 따르면, 상기 반도체 소자 픽업 장치(100)는 진공압을 이용하여 반도체 소자를 픽업하기 위한 진공 피커(110)와, 상기 진공 피커(110)를 수직 방향으로 이동시키기 위한 수직 구동부(120)와, 상기 수직 구동부(120)의 동작을 제어하기 위한 제어 유닛(130)을 포함할 수 있다.
도시되지는 않았으나, 상기 진공 피커(110)는 상기 반도체 소자를 진공 흡착하기 위하여 진공홀을 구비하는 콜릿(미도시)을 포함할 수 있으며, 상기 수직 구동부(120)는, 일 예로서, 상기 진공 피커(110)를 수직 방향으로 이동시키기 위한 구동력을 제공하는 리니어 서보 모터(122)와, 상기 리니어 서보 모터(122)에 의해 수직 방향으로 이동 가능하게 구성된 가동 부재(124)를 포함할 수 있다. 특히, 상기 진공 피커(110)는 상기 가동 부재(124)에 수직 방향으로 이동 가능하도록 장착될 수 있으며, 상기 진공 피커(110)와 상기 가동 부재(124) 사이에는 상기 진공 피커(110)를 탄성적으로 지지하기 위한 탄성 부재(126)가 배치될 수 있다. 상기 탄성 부재(126)로는 코일 스프링이 사용될 수 있으며, 상기 진공 피커(110)가 상기 반도체 소자(10)를 픽업하기 위하여 상기 반도체 소자(10)에 밀착되는 경우 상기 탄성 부재(126)에 의해 충격이 완화될 수 있다. 또한, 상기 수직 구동부(120)는 상기 진공 피커(110)의 높이를 측정하기 위한 높이 센서(128)를 포함할 수 있다. 예를 들면, 상기 높이 센서(128)로는 상기 가동 부재(124)와 함께 이동 가능하게 배치되는 리니어 엔코더를 포함할 수 있다.
특히, 상기 제어 유닛(130)은 상기 진공 피커(110)의 내부 진공압이 허용 범위를 만족하는지 여부를 판단할 수 있다. 이를 위하여, 상기 반도체 소자 픽업 장치(100)는, 상기 진공 피커(110) 아래에 배치되며 상기 진공 피커(110) 내부의 진공압을 측정하기 위한 측정 부재(140)와, 상기 측정 부재(140)의 하부에 배치되며 자기력을 이용하여 상기 측정 부재(140)에 하방으로 하중을 인가하기 위한 하중 인가 유닛(142)을 포함할 수 있다. 이때, 상기 제어 유닛(130)은 상기 측정 부재(140)를 픽업하도록 상기 진공 피커(110)와 상기 수직 구동부(120)의 동작을 제어하며 상기 측정 부재(140)의 픽업 여부에 따라 상기 진공 피커(110) 내부의 상기 진공압이 허용 범위를 만족하는지 여부를 판단할 수 있다.
예를 들면, 상기 측정 부재(140) 및 하중 인가 부재(142) 중 적어도 하나는 영구자석을 포함할 수 있으며, 상기 영구자석의 자기력에 의해 상기 측정 부재(140)와 상기 하중 인가 부재(142) 사이에는 인력이 작용될 수 있다. 상기 측정 부재(140)와 상기 하중 인가 부재(142)는 도시된 바와 같이 하우징(144) 내에 수납될 수 있으며, 상기 측정 부재(140)는 상기 하우징(144) 내에서 수직 방향으로 이동 가능하게 구성될 수 있다. 예를 들면, 상기 측정 부재(140)와 상기 하중 인가 부재(142)는 대략 원형 디스크 형태로 구성될 수 있으며, 상기 측정 부재(140)는 상기 하우징(144)의 내측면에 의해 수직 방향으로 안내될 수 있다.
상기 제어 유닛(130)은, 상기 측정 부재(140)를 진공 흡착하기 위하여 상기 진공 피커(110)를 하강시키고 이어서 상기 측정 부재(140)를 기 설정된 측정 높이로 픽업하기 위하여 상기 진공 피커(110)를 상승시키도록 상기 수직 구동부(120)의 동작을 제어하는 피커 제어부(132)와, 상기 측정 부재(140)가 픽업된 후 상기 진공 피커(110) 내부의 상기 진공압을 측정하기 위한 압력 측정부(134)를 포함할 수 있다. 또한, 상기 제어 유닛(130)은, 진공 배관을 통해 상기 진공 피커(110)와 연결되며 상기 진공 피커(110)에 진공을 제공하기 위한 진공 제공부(136)를 더 포함할 수 있으며, 상기 압력 측정부(134)는 상기 진공 배관 또는 상기 진공 제공부(136)에 연결될 수 있다.
도 2 및 도 3은 도 1에 도시된 반도체 소자 픽업 장치의 동작을 설명하기 위한 개략도들이다.
도 2를 참조하면, 상기 피커 제어부(132)는 상기 진공 피커(110)를 하강시켜 상기 진공 피커(110)가 상기 측정 부재(140)의 상부면에 밀착되도록 상기 수직 구동부(120)의 동작을 제어할 수 있다. 이때, 상기 피커 제어부(132)는 상기 높이 센서(128)에 의해 측정되는 값을 이용하여 상기 진공 피커(110)의 높이를 제어할 수 있다. 상기와 같이 진공 피커(110)가 상기 측정 부재(140)의 상부면에 밀착된 후 상기 진공 제공부(136)는 상기 측정 부재(140)가 상기 진공 피커(110)에 진공 흡착되도록 진공압을 제공할 수 있다.
이어서, 도 3에 도시된 바와 같이 상기 피커 제어부(132)는 상기 진공 피커(110)를 기 설정된 높이로 상승시킬 수 있으며, 이에 따라 상기 측정 부재(140)가 진공 피커(110)에 의해 픽업될 수 있다. 이때, 상기 진공압이 허용 범위를 만족하는 경우 상기 측정 부재(140)는 상기 진공 피커(110)에 의해 정상적으로 픽업될 수 있으나, 상기 진공압이 허용 범위를 벗어나는 경우 상기 측정 부재(140)와 상기 하중 인가 부재(142) 사이의 자기력이 상기 진공 피커(110)의 흡착력보다 클 수 있으므로 상기 측정 부재(140)는 상기 진공 피커(110)에 의해 픽업되지 않을 수 있다.
상기 압력 측정부(134)는 상기 진공 피커(110) 내부의 진공압을 측정함으로써 상기 측정 부재(140)의 픽업 여부를 판단할 수 있다. 즉, 상기 측정 부재(140)가 상기 진공 피커(110)에 의해 픽업되지 않는 경우 상기 콜릿의 진공홀을 통해 다량의 진공 누설이 발생될 수 있으므로 상기 진공 피커(110) 내부의 진공압이 크게 낮아질 수 있으며, 이를 통해 상기 콜릿의 교체가 즉시 필요한 것으로 판단될 수 있다.
한편, 상기 측정 부재(140)가 상기 진공 피커(110)에 의해 픽업되는 경우 상기 진공 피커(110) 내부의 진공압이 허용 범위를 만족하는 것으로 판단될 수 있다. 그러나, 상기 측정 부재(140)가 상기 진공 피커(110)에 의해 픽업되는 경우라도 상기 압력 측정부(134)에 의해 측정된 진공압이 상대적으로 낮은 경우 즉 기 설정된 진공압 허용 범위에 근접하거나 다소 벗어나는 경우 소량의 진공 누설이 발생되는 것으로 판단될 수 있으며, 상기 측정된 진공압에 따라 상기 콜릿의 교체가 필요한 시기를 예측할 수 있다.
상술한 바와 같은 본 발명의 실시예들에 따르면, 상기 진공 피커(110)에 의해 상기 측정 부재(140)가 픽업되는지 여부에 따라 상기 진공 피커(110) 내부의 진공압이 허용 범위를 만족하는지 여부를 판단할 수 있다. 결과적으로, 상기 진공 피커(110)에 구비되는 콜릿의 교체가 필요한지 여부를 즉시 판단할 수 있으며, 이를 통해 상기 반도체 소자의 픽업 불량을 크게 감소시킬 수 있다. 또한, 상기 측정 부재(140)를 픽업한 상태에서 상기 진공 피커(110) 내부의 진공압을 측정함으로써 상기 콜릿의 교체가 필요한 시기를 예측할 수 있으며, 이를 통해 보다 안정적으로 상기 진공 피커를 관리할 수 있다.
상기에서는 본 발명의 바람직한 실시예를 참조하여 설명하였지만, 해당 기술 분야의 숙련된 당업자는 하기의 청구범위에 기재된 본 발명의 사상 및 영역으로부터 벗어나지 않는 범위 내에서 본 발명을 다양하게 수정 및 변경시킬 수 있음을 이해할 수 있을 것이다.
100 : 반도체 소자 픽업 장치
110 : 진공 피커
120 : 수직 구동부 122 : 리니어 서보 모터
124 : 가동 부재 126 : 탄성 부재
128 : 높이 센서 130 : 제어 유닛
132 : 피커 제어부 134 : 압력 측정부
136 : 진공 제공부 140 : 측정 부재
142 : 하중 인가 유닛 144 : 하우징
120 : 수직 구동부 122 : 리니어 서보 모터
124 : 가동 부재 126 : 탄성 부재
128 : 높이 센서 130 : 제어 유닛
132 : 피커 제어부 134 : 압력 측정부
136 : 진공 제공부 140 : 측정 부재
142 : 하중 인가 유닛 144 : 하우징
Claims (5)
- 진공압을 이용하여 반도체 소자를 픽업하기 위한 진공 피커;
상기 진공 피커를 수직 방향으로 이동시키기 위한 수직 구동부;
상기 진공 피커 아래에 배치되며 상기 진공 피커 내부의 상기 진공압을 측정하기 위한 측정 부재;
상기 측정 부재의 아래에 배치되며 자기력을 이용하여 상기 측정 부재에 하방으로 하중을 인가하기 위한 하중 인가 부재; 및
상기 측정 부재를 픽업하도록 상기 진공 피커와 상기 수직 구동부의 동작을 제어하며 상기 측정 부재의 픽업 여부에 따라 상기 진공 피커 내부의 상기 진공압이 허용 범위를 만족하는지 여부를 판단하는 제어 유닛을 포함하는 것을 특징으로 하는 반도체 소자 픽업 장치. - 제1항에 있어서, 상기 측정 부재 및 상기 하중 인가 부재 중 적어도 하나는 영구자석을 포함하는 것을 특징으로 하는 반도체 소자 픽업 장치.
- 제2항에 있어서, 상기 측정 부재 및 상기 하중 인가 부재가 수납되는 하우징을 더 포함하며,
상기 측정 부재는 상기 하우징 내에서 수직 방향으로 이동 가능하도록 구성되는 것을 특징으로 하는 반도체 소자 픽업 장치. - 제1항에 있어서, 상기 제어 유닛은,
상기 측정 부재를 진공 흡착하기 위하여 상기 진공 피커를 하강시키고 이어서 상기 측정 부재를 기 설정된 측정 높이로 픽업하기 위하여 상기 진공 피커를 상승시키도록 상기 수직 구동부의 동작을 제어하는 피커 제어부; 및
상기 측정 부재가 픽업된 후 상기 진공 피커 내부의 상기 진공압을 측정하기 위한 압력 측정부를 포함하는 것을 특징으로 하는 반도체 소자 픽업 장치. - 제4항에 있어서, 상기 제어 유닛은,
진공 배관을 통해 상기 진공 피커와 연결되며 상기 진공 피커에 진공을 제공하기 위한 진공 제공부를 더 포함하며,
상기 압력 측정부는 상기 진공 배관 또는 상기 진공 제공부에 연결되는 것을 특징으로 하는 반도체 소자 픽업 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180139187A KR102548809B1 (ko) | 2018-11-13 | 2018-11-13 | 반도체 소자 픽업 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180139187A KR102548809B1 (ko) | 2018-11-13 | 2018-11-13 | 반도체 소자 픽업 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200055487A true KR20200055487A (ko) | 2020-05-21 |
| KR102548809B1 KR102548809B1 (ko) | 2023-06-27 |
Family
ID=70910433
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180139187A KR102548809B1 (ko) | 2018-11-13 | 2018-11-13 | 반도체 소자 픽업 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102548809B1 (ko) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6434523U (ko) * | 1987-08-26 | 1989-03-02 | ||
| JPH07270260A (ja) * | 1994-03-31 | 1995-10-20 | Shimadzu Corp | 電磁式の天びんまたは力測定器 |
| KR20070101054A (ko) * | 2006-04-10 | 2007-10-16 | 삼성전자주식회사 | 수평 체크를 위한 진공 센서를 갖는 칩 접착 장치 |
| KR101273921B1 (ko) * | 2013-01-16 | 2013-06-12 | (주)코셈 | 정전용량 센서 어레이 패널을 이용한 콜렛의 수평도 및 압력 측정 시스템 |
| KR20140119604A (ko) | 2013-03-27 | 2014-10-10 | 세메스 주식회사 | 테스트 핸들러 |
| JP2016201410A (ja) * | 2015-04-08 | 2016-12-01 | 三星電子株式会社Samsung Electronics Co.,Ltd. | 荷重補正装置、荷重補正方法、実装装置及び実装方法 |
-
2018
- 2018-11-13 KR KR1020180139187A patent/KR102548809B1/ko active IP Right Grant
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6434523U (ko) * | 1987-08-26 | 1989-03-02 | ||
| JPH07270260A (ja) * | 1994-03-31 | 1995-10-20 | Shimadzu Corp | 電磁式の天びんまたは力測定器 |
| KR20070101054A (ko) * | 2006-04-10 | 2007-10-16 | 삼성전자주식회사 | 수평 체크를 위한 진공 센서를 갖는 칩 접착 장치 |
| KR101273921B1 (ko) * | 2013-01-16 | 2013-06-12 | (주)코셈 | 정전용량 센서 어레이 패널을 이용한 콜렛의 수평도 및 압력 측정 시스템 |
| KR20140119604A (ko) | 2013-03-27 | 2014-10-10 | 세메스 주식회사 | 테스트 핸들러 |
| JP2016201410A (ja) * | 2015-04-08 | 2016-12-01 | 三星電子株式会社Samsung Electronics Co.,Ltd. | 荷重補正装置、荷重補正方法、実装装置及び実装方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102548809B1 (ko) | 2023-06-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9689916B2 (en) | Method for determining set value of pressure for inspection in wafer inspection apparatus | |
| US9581641B2 (en) | Wafer inspection apparatus | |
| JP6031292B2 (ja) | プローブカードへの基板当接方法 | |
| JP5952645B2 (ja) | ウエハ検査用インターフェース及びウエハ検査装置 | |
| JP5718601B2 (ja) | ダイボンダ及び半導体製造方法 | |
| KR102096567B1 (ko) | 반도체 소자 픽업 장치 | |
| KR102548809B1 (ko) | 반도체 소자 픽업 장치 | |
| JP2008024401A (ja) | 位置決め手段付き搬送装置 | |
| KR102096570B1 (ko) | 반도체 소자 픽업 장치 | |
| KR102548788B1 (ko) | 반도체 소자 테스트 장치 | |
| JP2016152334A (ja) | プローブ装置 | |
| KR20200055485A (ko) | 반도체 소자 픽업 방법 및 이를 수행하기 위한 장치 | |
| KR102573339B1 (ko) | 반도체 소자 픽업 장치 및 이의 동작 제어 방법 | |
| KR20130077325A (ko) | 반도체 소자들을 픽업하기 위한 장치 | |
| KR102181497B1 (ko) | 반도체 소자 이송 장치의 검사 방법 | |
| KR102037975B1 (ko) | 트레이 승강 장치 | |
| KR102104051B1 (ko) | 소자핸들러 | |
| JP5787711B2 (ja) | 真空吸着保持装置およびその方法 | |
| KR102548782B1 (ko) | 반도체 소자 테스트 장치 | |
| JPWO2009060515A1 (ja) | 搬送装置および電子部品ハンドリング装置 | |
| KR102307942B1 (ko) | 반도체 소자 검사 장치 | |
| KR102316938B1 (ko) | 다이 이송 모듈 및 이를 포함하는 다이 검사 장치 | |
| JP5604355B2 (ja) | 半導体チップの検査選別装置及び検査選別方法 | |
| TWI669514B (zh) | Mechanism for testing semiconductor products using electrostatic carriers | |
| KR102080871B1 (ko) | 진공 피커 및 이를 포함하는 반도체 패키지 이송 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |