KR20190092563A - 환경의 공간적 프로파일의 추정 - Google Patents
환경의 공간적 프로파일의 추정 Download PDFInfo
- Publication number
- KR20190092563A KR20190092563A KR1020197020778A KR20197020778A KR20190092563A KR 20190092563 A KR20190092563 A KR 20190092563A KR 1020197020778 A KR1020197020778 A KR 1020197020778A KR 20197020778 A KR20197020778 A KR 20197020778A KR 20190092563 A KR20190092563 A KR 20190092563A
- Authority
- KR
- South Korea
- Prior art keywords
- light
- environment
- dimension
- spatial profile
- estimation
- Prior art date
Links
- 238000000034 method Methods 0.000 claims abstract description 28
- 230000003287 optical effect Effects 0.000 claims description 54
- 239000000835 fiber Substances 0.000 claims description 17
- 238000012545 processing Methods 0.000 claims description 15
- 230000005540 biological transmission Effects 0.000 claims description 14
- 230000003595 spectral effect Effects 0.000 claims description 6
- 239000002131 composite material Substances 0.000 claims description 5
- 238000000926 separation method Methods 0.000 claims description 5
- 239000006185 dispersion Substances 0.000 description 40
- 239000013307 optical fiber Substances 0.000 description 13
- 238000005259 measurement Methods 0.000 description 8
- 238000012986 modification Methods 0.000 description 6
- 230000004048 modification Effects 0.000 description 6
- 238000005253 cladding Methods 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 4
- 230000005855 radiation Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 239000007787 solid Substances 0.000 description 3
- 239000006117 anti-reflective coating Substances 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 238000003032 molecular docking Methods 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000009304 pastoral farming Methods 0.000 description 2
- 238000011002 quantification Methods 0.000 description 2
- 239000000243 solution Substances 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 238000000098 azimuthal photoelectron diffraction Methods 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 230000002860 competitive effect Effects 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000005670 electromagnetic radiation Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/002—Active optical surveying means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/32—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/66—Tracking systems using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4811—Constructional features, e.g. arrangements of optical elements common to transmitter and receiver
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4818—Constructional features, e.g. arrangements of optical elements using optical fibres
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4911—Transmitters
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/10—Beam splitting or combining systems
- G02B27/1086—Beam splitting or combining systems operating by diffraction only
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/10—Beam splitting or combining systems
- G02B27/12—Beam splitting or combining systems operating by refraction only
- G02B27/126—The splitting element being a prism or prismatic array, including systems based on total internal reflection
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/42—Diffraction optics, i.e. systems including a diffractive element being designed for providing a diffractive effect
- G02B27/4233—Diffraction optics, i.e. systems including a diffractive element being designed for providing a diffractive effect having a diffractive element [DOE] contributing to a non-imaging application
- G02B27/4244—Diffraction optics, i.e. systems including a diffractive element being designed for providing a diffractive effect having a diffractive element [DOE] contributing to a non-imaging application in wavelength selecting devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
Abstract
광 감지 및 거리측정(LiDAR) 기반 기술에 기초한 환경에서 공간적 프로파일의 추정을 용이하기 하기 위한 시스템 및 방법이 개시된다. 일 배치에서, 본 발명은 수직 방향과 같은 1개 차원에 걸쳐 빛을 지향시키는 것에 기초한 공간적 프로파일 추정을 용이하게 한다. 다른 배치에서, 일차원적으로 지향된 빛을 다른 차원으로 더 지향시킴으로써, 예컨대 수평 방향을 따라서, 본 발명은 2개 차원들에서 빛을 지향시키는 것에 기초한 공간적 프로파일 추정을 용이하게 한다.
Description
본 발명은 일반적으로 환경의 공간적 프로파일의 추정을 용이하게 하는 시스템 및 방법에 관한 것이다. 더 구체적으로는, 본 발명은 적어도 일차원에 걸쳐 빛을 지향시키는 것에 기초하여 환경의 공간적 프로파일의 추정을 용이하게 하는 것과 관련된다.
공간적 프로파일링(spatial profiling)은 원하는 시야에서 보여진 환경의 매핑을 지칭한다. 시야의 각 지점 혹은 픽셀(pixel)은 환경의 표현을 형성하는 거리와 연관된다. 공간적 프로파일들은 환경에서 물체 및/또는 장애물을 식별하는데 유용할 수 있어서, 작업 자동화를 용이하게 한다.
공간 프로파일링의 한가지 기법은 특정 방향으로 환경에 빛을 보내고 그 방향으로부터 반사되어 돌아오는 임의의 빛을 감지하는 것으로, 예컨대, 환경의 반사면을 탐지하는 것이다. 반사된 빛은 반사면의 거리를 결정하기 위한 관련 정보를 가지고 있다. 특정 방향과 거리의 조합은 환경의 표현에서 점 또는 픽셀을 형성한다. 상술한 단계들은 복수의 다른 방향들에 대해 되풀이 되어 다른 점 또는 픽셀들의 표현을 형성하고, 그럼으로써 원하는 시야에서 환경의 공간적 프로파일을 용이하게 추정할 수 있다.
본 명세서에서 임의의 선행기술에 대한 참조는, 이 선행기술이 임의의 관할권에서 상식적인일반 지식의 일부를 형성하는 것으로 인정되거나 임의의 형태의 제안을 하는 것으로 받아들여져서는 안되며, 이 선행기술은 당업자에의해 이해되고, 관련되거나 및/또는 다른 선행기술들과 조합될 수 있는 것으로 합리적으로 기대되는 것으로 받아들여져서는 안된다.
본 발명의 목적은 환경의 공간적 프로파일의 추정을 제공하는 것이다.
본 발명의 일 양태에 따르면, 환경의 공간적 프로파일(spatial profile)의 추정을 용이하게 하기 위한 시스템이 제공되며, 상기 시스템은:
다중 파장 채널들 중에서 선택된 하나 또는 그 이상에서 빛을 제공하도록 구성된 광원으로서, 상기 광원의 빛은 적어도 하나의 시간-가변 특성(time-varying attribute)을 갖는, 광원(light source);
개구(aperture)를 구비하고,
상기 환경으로 상기 개구를 통해 출력광(outgoing light)을 공간적으로 지향시키고, 상기 환경에 의해 반사된 상기 출력광의 적어도 일부분을 수신하고, 상기 출력광은:
상기 개구의 제1 부분을 통과하여 복수의 방향들 중의 제1 방향으로 제1 차원을 따라 상기 환경으로 지향되고, 상기 제1 방향은 제1 선택된 파장 채널(first selected wavelength channel)에서의 상기 출력광에 대응하고; 그리고
상기 개구의 제2 부분을 통과하여 복수의 방향들 중의 제2 방향으로 상기 제1 차원을 따라 환경으로 지향되고, 상기 제2 방향은 제2 선택된 파장 채널(second selected wavelength channel)에서의 상기 출력광에 대응되고, 상기 제2 부분은 상기 제1 부분과 공간적으로 오버랩;되도록 구성된 빔 지향기(beam director);
반사광을 감지하도록 구성된 광 감지기(light detector); 및
상기 제1 방향 및 상기 제2 방향과 연관된 상기 환경의 상기 공간적 프로파일의 추정을 위한 상기 반사광의 상기 적어도 하나의 시간-가변 특성과 연관된 적어도 하나의 특징을 결정하도록 구성되는, 처리 유닛(processing unit);
을 포함한다.
상기 제1 선택된 파장 채널에서의 상기 출력광은 상기 제2 선택된 파장 채널에서 상기 출력광과 실질적으로 동일한 빔 형상을 포함할 수 있다.
상기 빔 지향기는 상기 개구의 제3 부분을 통과하여 상기 제1 선택된 파장 채널에서 상기 반사광을 수신하고, 상기 개구의 제4 부분을 통과하여 상기 제2 선택된 파장 채널에서 상기 반사광을 수신하도록 구성되고, 상기 개구의 상기 제3 부분은 상기 개구의 상기 제4 부분과 공간적으로 오버랩될 수 있다. 상기 개구의 상기 제1 부분, 상기 제2 부분, 상기 제3 부분 및 상기 제4 부분은 서로 간에 공간적으로 오버랩될 수 있다.
일 예시에서, 상기 개구의 상기 제1 부분 및 상기 제2 부분은 적어도 4mm의 빔 둘레 사이즈에 대응할 수 있다.
일 예시에서, 상기 개구의 상기 제3 부분 및 상기 제4 부분은 적어도 4mm의 빔 둘레 사이즈에 대응할 수 있다.
상기 시스템은 상기 출력광을 상기 광원으로부터 상기 빔 지향기로 전송하고 상기 반사광을 상기 빔 지향기로부터 상기 광 감지기로 전송하도록 구성되는 광 전송 어셈블리(light transport assembly)를 더 포함할 수 있고, 상기 광 전송 어셈블리는:
상기 제1 선택된 파장 채널 및 상기 제2 선택된 파장 채널에서 상기 출력광을 전달하기 위한 상기 광원과 상기 빔 지향기 사이의 아웃바운드 유도-광 경로(outbound guided-optic route); 및
상기 제1 선택된 파장 채널 및 상기 제2 선택된 파장 채널에서의 상기 반사광을 전달하기 위한 상기 빔 지향기와 상기 광 감지기 사이의 인바운드 유도-광 경로(inbound guided-optic route);를 포함할 수 있다.
상기 인바운드 유도-광 경로 및 상기 아웃바운드 유도-광 경로는: 광섬유 경로(fibre-optic route) 및 광회로 경로(optical circuit route)의 그룹으로부터 각각 선택될 수 있다. 상기 아웃바운드 유도-광 경로는 상기 인바운드 유도-광 경로 보다 작은 개구수(numerical aperture)와 연관될 수 있다. 상기 아웃바운드 유도-광 경로는 상기 인바운드 유도-광 경로로부터 공간적으로 분리될 수 있다.
상기 광 전송 어셈블리는 상기 아웃바운드 유도-광 경로에 단일-모드 섬유를 포함하고 상기 인바운드 유도-광 경로에 다중-모드 섬유를 포함할 수 있다.
상기 아웃바운드 유도-광 경로는 상기 인바운드 유도-광 경로와 공간적으로 오버랩될 수 있다.
상기 광 전송 어셈블리는 상기 공간적으로 오버랩된 아웃바운드 유도-광 경로 및 인바운드 유도-광 경로에 이중-클래드 섬유(double clad fibre)를 포함하고, 상기 이중-클래드 섬유는 상기 아웃바운드 유도-광 경로에 대한 제1 개구수 및 상기 인바운드 유도-광 경로에 대한, 상기 제1 개구수보다 큰, 제2 개구수와 연관될 수 있다.
상기 빔 지향기는 하나 또는 그 이상의 회절 격자(diffraction grating)를 포함할 수 있다. 상기 하나 또는 그 이상의 회절 격자들은, 상기 빛을 시계 방향 경로 또는 반시계 방향 경로로 돌리도록 배치된 3개의 회절 격자들을 포함할 수 있다.
상기 빔 지향기는 하나 또는 그 이상의 빔 보상기(beam compensator)를 포함할 수 있다. 상기 하나 또는 그 이상의 빔 보상기 중의 적어도 하나는 상기 하나 또는 그 이상의 회절 격자들의 인접한 쌍들 사이에 위치될 수 있다.
상기 빔 지향기는 회전가능하거나, 또는 회전가능한 굴절 요소 또는 회전가능한 반사 요소를 포함하여, 상기 제1 차원에 실질적으로 직교하는 제2 차원에 걸쳐 빛을 지향시킬 수 있다. 상기 광 전송 어셈블리는 상기 회전가능한 빔 지향기와 빛을 결합시키는 슬립 링 어셈블리(slip ring assembly)를 포함할 수 있다.
상기 빔 지향기는 복합 포트(composite port)와 N개의 인터리빙 포트들(interleaving ports) 중의 하나 사이의 빛을 포팅하는 스펙트럼 콤브 필터(spectral comb filter)를 포함하고, 상기 복합 포트는 상기 다중 파장 채널들의 모든 N차 연속 파장 채널들(consecutive wavelength channels) 중의 임의의 하나에서 빛을 수신하거나 제공하도록 구성되고, 상기 N개의 인터리빙 포트들은 파장 채널들의 N개 그룹들 중의 하나에 대응하는 빛을 각각 제공하거나 각각 수신하도록 구성될 수 있다. 상기 N개의 인터리빙 포트들은, 제2 차원에 걸쳐 대응하는 각 분리(angular separation)를 제공하기 위하여 광축으로부터 각각의 양만큼 각각 오프셋될 수 있다. N은 2와 16을 포함하여 2와 16 사이의 임의의 정수일 수 있다.
본 발명의 두번째 양태에 따르면, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템으로서, 상기 시스템은:
다중 파장 채널들 중에서 선택된 하나 또는 그 이상에서 빛을 제공하도록 구성된 광원으로서, 상기 광원의 빛은 적어도 하나의 시간-가변 특성을 갖는, 광원;
하나 또는 그 이상의 회절 격자들을 구비하고,
상기 하나 또는 그 이상의 회전 격자들을 통해 출력광을 공간적으로 지향시켜 상기 환경으로 보내고, 상기 환경에 의해 반사된 상기 출력광의 적어도 일부분을 수신하며, 상기 출력광은:
상기 하나 또는 그 이상의 회절 격자들을 통과하여 복수의 방향들 중의 제1 방향으로 제1 차원을 따라 상기 환경으로 지향되고, 상기 제1 방향은 제1 선택된 파장 채널에서의 상기 출력광에 대응하고; 그리고
상기 하나 또는 그 이상의 회절 격자들을 통과하여 복수의 방향들 중의 제2 방향으로 상기 제1 차원을 따라 환경으로 지향되고, 상기 제2 방향은 제2 선택된 파장 채널에서의 상기 출력광에 대응되고, 상기 하나 또는 그 이상의 회절 격자들 중의 임의의 하나 또는 그 이상은 조절가능하게 틸팅가능하여 상기 제1 차원에 실질적으로 직교하는 제2 차원을 따라 빛을 지향;시키도록 구성되는, 빔 지향기(beam director);
반사광을 감지하도록 구성된 광 감지기(light detector); 및
상기 제1 방향 및 상기 제2 방향과 연관된 상기 환경의 상기 공간적 프로파일의 추정을 위한 상기 반사광의 상기 적어도 하나의 시간-가변 특성과 연관된 적어도 하나의 특징을 결정하도록 구성되는, 처리 유닛(processing unit);
을 포함한다.
본 발명의 추가적인 양태들 및 이전에 설명된 양태들의 추가적인 실시예들은 첨부된 도면을 참조하여 예시로서 주어진 다음의 설명으로부터 명백해질 것이다.
본 발명에 의하면 환경의 공간적 프로파일의 추정이 제공된다.
도 1a, 1b, 1c는 환경의 공간적 프로파일의 용이하게 추정하기 위한 시스템의 배치를 도시한 것이다.
도 2a, 2b는 시간-가변 광도 프로파일을 갖는 출력광을 제공하는 광원의 배치를 도시한 것이다.
도 2c, 2d는 시간-가변 주파수 편차를 갖는 출력광을 제공하는 광원의 배치를 도시한 것이다.
도 3은 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템의 다른 배치를 도시한 것이다.
도 4a는 도 4c, 4d, 4e, 4f, 4g 중 임의의 틸팅가능 회절 격자의 틸팅가능각을 추정하기 위한 구성을 도시한 것이다.
도 4b는 0차 광 광도 및 틸팅가능각 사이의 관계의 예제를 도시한 것이다.
도 4c는 다른 파장 채널들에서 빛을 수신 및 지향하는 각분산요소의 다른 예제이다.
도 4d는 다른 파장 채널들에서 빛을 수신 및 지향하는 각분산 요소의 다른 예제이다.
도 4e는 다른 파장 채널들에서 빛을 수신 및 지향하는 각분산 요소의 다른 예제이다.
도 4f는 다른 파장 채널들에서 빛을 수신 및 지향하는 각분산요소의 다른 예제이다.
도 4g는 다른 파장 채널들에서 빛을 수신 및 지향하는 각분산요소의 다른 예제이다.
도 4h는 조절가능하게 틸팅가능한 회절 격자의 사시도를 도시한 것이다.
도 4i는 제2 차원에 걸친 빔 방향과 격자 틸팅가능 각도 사이의 관계를 도시한 것이다.
도 4j는 제1 차원에 걸친 빔 방향과 격자 틸팅가능 각도 사이의 관계를 도시한 것이다.
도 5는 선택된 파장 채널에서 빛을 수신 및 지향하는 도 3에 도시된 각분산 요소의 배치를 도시한 것이다.
도 6은 환경에서 공간적 프로파일의 추정을 용이하게 하기 위한 시스템의 다른 배치를 도시한 것이다.
도 7은 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템의 다른 배치를 도시한 것이다.
도 8은 스펙트럼 콤브 필터(spectral comb filter)의 예제를 도시한 것이다.
도 9는 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템의 다른 배치를 도시한 것이다.
도 2a, 2b는 시간-가변 광도 프로파일을 갖는 출력광을 제공하는 광원의 배치를 도시한 것이다.
도 2c, 2d는 시간-가변 주파수 편차를 갖는 출력광을 제공하는 광원의 배치를 도시한 것이다.
도 3은 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템의 다른 배치를 도시한 것이다.
도 4a는 도 4c, 4d, 4e, 4f, 4g 중 임의의 틸팅가능 회절 격자의 틸팅가능각을 추정하기 위한 구성을 도시한 것이다.
도 4b는 0차 광 광도 및 틸팅가능각 사이의 관계의 예제를 도시한 것이다.
도 4c는 다른 파장 채널들에서 빛을 수신 및 지향하는 각분산요소의 다른 예제이다.
도 4d는 다른 파장 채널들에서 빛을 수신 및 지향하는 각분산 요소의 다른 예제이다.
도 4e는 다른 파장 채널들에서 빛을 수신 및 지향하는 각분산 요소의 다른 예제이다.
도 4f는 다른 파장 채널들에서 빛을 수신 및 지향하는 각분산요소의 다른 예제이다.
도 4g는 다른 파장 채널들에서 빛을 수신 및 지향하는 각분산요소의 다른 예제이다.
도 4h는 조절가능하게 틸팅가능한 회절 격자의 사시도를 도시한 것이다.
도 4i는 제2 차원에 걸친 빔 방향과 격자 틸팅가능 각도 사이의 관계를 도시한 것이다.
도 4j는 제1 차원에 걸친 빔 방향과 격자 틸팅가능 각도 사이의 관계를 도시한 것이다.
도 5는 선택된 파장 채널에서 빛을 수신 및 지향하는 도 3에 도시된 각분산 요소의 배치를 도시한 것이다.
도 6은 환경에서 공간적 프로파일의 추정을 용이하게 하기 위한 시스템의 다른 배치를 도시한 것이다.
도 7은 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템의 다른 배치를 도시한 것이다.
도 8은 스펙트럼 콤브 필터(spectral comb filter)의 예제를 도시한 것이다.
도 9는 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템의 다른 배치를 도시한 것이다.
본 발명은 광 감지 및 거리측정(Light Detection And Ranging, LiDAR) 기반 기술에 기초한 환경에서 공간적 프로파일의 추정을 용이하게 하기 위한 시스템 및 방법을 개시한다. 이하에서 "광(light)"은 광학적 주파수들을 가진 전자기 복사를 포함하며, 원적외선 복사, 적외선 복사, 가시광 복사 및 자외선 복사를 포함한다. 일반적으로, LiDAR는 빛을 환경으로 전송하고 이어서 그 환경에 의해 반사되는 빛을 감지하는 것을 포함한다. 빛이 왕복을 하는데 걸리는 시간, 따라서 시야 내의 반사면들의 거리를 결정함으로써, 환경의 공간적인 프로파일의 추정이 형성될 수 있다. 일 배치에서, 본 발명은 수직 방향을 따르는 것과 같은 1개 차원에 걸쳐 빛을 지향시키는 것에 기초하여 공간적 프로파일 추정을 용이하게 한다. 다른 배치에서, 1차원적으로 지향된 빛을 다른 차원에 더 지향시킴으로써, 예컨대 수평 방향으로, 본 발명은 2개 차원에서 빛을 지향시키는 것에 기초하여 공간적 프로파일 추정을 용이하게 한다.
발명자들은, 빛을 적어도 하나의 차원에 걸쳐 지향함에 있어서, 출력광의 광학 빔 크기를 선택하는 것과 관련된 경쟁적 요구사항들이 반사광의 감지를 향상시키는 데 역할을 한다는 점을 인식한다. 일반적으로, 커다란 초기 빔 사이즈는 거리에 걸쳐 적은 빔 분산을 야기한다. 따라서 더 큰 빔 사이즈를 선택하는 것은 고정된 감지 영역에서 수신된 또는 감지된 전력(power)을 향상시킨다. 그렇게 하는 것은 시스템 퍼포먼스를 증가시키는데, 긴 범위의 감지에서 신호-대-잡음 비율을 증가시키고 더 정확한 공간 추정과 같은 것이며, 및/또는 전력 소모 및 보존을 향상시키기 위한 송신 전력 요구치를 감소시키는 것이다. 그러나, 임의의 광학 시스템은 특정한 개구(aperture)를 가지며, 이것은 예컨대 그 물리적 크기에 의해 제한되는 것으로서, 최대 빔 사이즈에 실질적인 한정을 부가한다. 개구의 상이한 분할된 부분들을 통해 빛을 전송하는 별개의 광원들을 기울임으로서 빛을 지향시키는 특정한 해결책들은 불가피하게 출력되는 빔 사이즈를 줄이고 따라서 수신되는 전력을 감소시킨다. 거울을 기계적으로 조절함으로써 특정 각도에서 빛을 조정하는 것을 포함하는 다른 해결책들은 추가적인 기계적 안정성을 요구할 것으로 예상된다. 이런 경쟁적 요구사항들을 고려하여, 발명자들은 빛이 지향되는 각도 또는 방향들의 숫자에 관계없이 개구 사이즈의 최대 활용을 실질적으로 가능케 하는 LiDAR-기반 시스템에서 출력광을 지향하는 시스템과 방법을 고안하였다.
공간적 회절은 광학 빔 분산을 좌우한다. 예컨대, 가우시안 빔(즉, 빔 축으로부터의 반경 변위에 대해 가우시안(Gaussian) 강도 분포를 가지는 빔)에 대하여, 범위 z에서의 빔 반경 w(즉, 강도가 축에서의 값보다 1/e2으로 하락하는 반경 변위)는  로 주어지며 여기서 w0는 빔 허리이며 zR =
로 주어지며 여기서 w0는 빔 허리이며 zR =  /
/ 은 레일리 범위(Rayleigh range)이다. 다른 빔 프로파일에 대하여, 공간적 회절 광학 계산이 범위 z에서 빔 프로파일을 결정하는데 사용될 수 있다. 달리 특정되지 않는 한, 이하의 설명에서는 광원이 가우시안 빔 프로파일을 가진 빛을 제공한다고 전제한다.
은 레일리 범위(Rayleigh range)이다. 다른 빔 프로파일에 대하여, 공간적 회절 광학 계산이 범위 z에서 빔 프로파일을 결정하는데 사용될 수 있다. 달리 특정되지 않는 한, 이하의 설명에서는 광원이 가우시안 빔 프로파일을 가진 빛을 제공한다고 전제한다.
레일리 범위 zR은 집광된 빔의 범위를 정량화하기에 좋은 척도이다. 그것은 주어진 빔 둘레를 가진 가우시안 빔에서, 빔 크기가  만큼 증가하는 거리이다. 가우시안 빔에 대한 위 공식은 음의 z 값을 포함하는 z축을 따른 임의의 시작점에 대해 적용가능하다. 양의 z 방향으로 진행하는 빔에 대하여, 빔은 z < 0에서는 수렴하고 z > 0에서는 발산한다. 파면(wavefront)은 z = 0에서 평탄한 빔 둘레이고 여기서 빔은 수렴도 발산도 하지 않는다. 파면의 곡률 반경은
만큼 증가하는 거리이다. 가우시안 빔에 대한 위 공식은 음의 z 값을 포함하는 z축을 따른 임의의 시작점에 대해 적용가능하다. 양의 z 방향으로 진행하는 빔에 대하여, 빔은 z < 0에서는 수렴하고 z > 0에서는 발산한다. 파면(wavefront)은 z = 0에서 평탄한 빔 둘레이고 여기서 빔은 수렴도 발산도 하지 않는다. 파면의 곡률 반경은  으로 주어지는데, 여기서 음의 곡률 반경은 수렴하는 빔을 양의 곡률 반경은 발산하는 빔을 나타낸다.
으로 주어지는데, 여기서 음의 곡률 반경은 수렴하는 빔을 양의 곡률 반경은 발산하는 빔을 나타낸다.
주어진 범위는 적절한 빔 둘레 사이즈 및 방출할 때의 곡률 반경에 기초하여 결정될 수 있다. 일 배치에서, 광원(예컨대 도 1a의 광원(102)은 평탄한 파면들을 방출한다. 출력 빔은 z = 0에 위치한 w(z=0)의 빔 사이즈를 가지는 광원(102)에 기초하여 발산한다. z = zR에서, 빔 사이즈는 w(z=zR)  이다. 물체에서 반사되면, 출력광의 일부가 산란(scatter) 또는 분산(diffuse)될 수도 있고, 그 경우에 반사광은 더 이상 원래의 가우시안 빔 프로파일을 가지지 않으며 따라서 더 이상 가우시안 광학에 따른 빔 사이즈 및 곡률 반경을 가지고 전파되지 않는다. 일 배치에서, zR은 시스템의 범위로 설정될 수 있다. 예컨대, λ = 1550nm에서, zR은
이다. 물체에서 반사되면, 출력광의 일부가 산란(scatter) 또는 분산(diffuse)될 수도 있고, 그 경우에 반사광은 더 이상 원래의 가우시안 빔 프로파일을 가지지 않으며 따라서 더 이상 가우시안 광학에 따른 빔 사이즈 및 곡률 반경을 가지고 전파되지 않는다. 일 배치에서, zR은 시스템의 범위로 설정될 수 있다. 예컨대, λ = 1550nm에서, zR은  =10mm에 대하여 약 200미터이다. 그러한 예시에서 대응하는 범위는 따라서 약 200미터로 설정될 수 있다(즉, z = 0으로부터 z = zR = 200미터).
=10mm에 대하여 약 200미터이다. 그러한 예시에서 대응하는 범위는 따라서 약 200미터로 설정될 수 있다(즉, z = 0으로부터 z = zR = 200미터).
다른 배치에서, 광원(102)은 수렴하는 파면을 방출하는데, z = -zR와 같은 것들에 대응되는 것이다. 방출되는 출력광은 w(z = -zR)  의 빔 사이즈를 갖는 z = -zR에 위치된 광원(102)에 기초하여 수렴 및 발산한다. 전파되는 출력광은 z = 0에서 빔 둘레 w(z = 0) 그리고 z = +zR에서 의 빔 사이즈 w(z = -zR)
의 빔 사이즈를 갖는 z = -zR에 위치된 광원(102)에 기초하여 수렴 및 발산한다. 전파되는 출력광은 z = 0에서 빔 둘레 w(z = 0) 그리고 z = +zR에서 의 빔 사이즈 w(z = -zR)  로 발달한다. 이 배치에서, 2zR이 시스템의 범위로 설정될 수 있다. 첫번째 배치와 비교하면, 이 배치는 최대 범위를 두 배로 향상시켰을 뿐 아니라, 빔 둘레를 향한 빔의 발달 때문에 절반 범위에서 공간 분해능이 향상된다. 예컨대, 언급된 대로, λ = 1550nm에서, zR은
로 발달한다. 이 배치에서, 2zR이 시스템의 범위로 설정될 수 있다. 첫번째 배치와 비교하면, 이 배치는 최대 범위를 두 배로 향상시켰을 뿐 아니라, 빔 둘레를 향한 빔의 발달 때문에 절반 범위에서 공간 분해능이 향상된다. 예컨대, 언급된 대로, λ = 1550nm에서, zR은  = 10mm에 대해 약 200미터이다. 그러한 예시에 대응하는 범위는 그러므로 400미터로 설정될 수 있다(즉, z = zR = -200미터로부터 z = zR = +200미터로).
= 10mm에 대해 약 200미터이다. 그러한 예시에 대응하는 범위는 그러므로 400미터로 설정될 수 있다(즉, z = zR = -200미터로부터 z = zR = +200미터로).
유사하게, 원하는 범위 zobject를 수용하기 위한 빔 사이즈를 결정하는 것은 레일리 범위 zR에 기초할 수 있다. 예컨대, 광원(102)이 평면 파면을 방출하는 경우에(예컨대, z = 0에 대응하는), 원하는 범위 100미터의 zobject는 광원(102)이 z = 0미터에 위치될 때 zR과 동일하도록 설정될 수 있으며, 반사면은 이 원하는 범위에서 z = zR = 100미터에 위치한다. 이 zR 값은 약 반경 7.0mm 또는 직경 14.0mm의 빔 둘레 w0에 대응한다. 그러면 원하는 범위 100m의 zobject에서 빔 지름은  = 9.9mm이다. 다른 예시로서, 광원(102)이 수렴하는 파면을 방출할 때(예컨대 z = -zR에 대응하는), 원하는 범위 zobject에서 100미터는 2zR과 동일하게 설정될 수 있으며, 광원(102)은 z = -zR = -50미터로, 원하는 범위에서 반사면은 z = +zR = +50미터이다. 이 zR 값은 약 반지름 5mm, 또는 지름 10mm의 빔 둘레 w0에 대응하며, 이 빔 둘레는 z = 0(또는 광원(102)으로부터 50m)에서 발생한다. 그러면 원하는 범위 100m의 zobject에서 빔 지름은
= 9.9mm이다. 다른 예시로서, 광원(102)이 수렴하는 파면을 방출할 때(예컨대 z = -zR에 대응하는), 원하는 범위 zobject에서 100미터는 2zR과 동일하게 설정될 수 있으며, 광원(102)은 z = -zR = -50미터로, 원하는 범위에서 반사면은 z = +zR = +50미터이다. 이 zR 값은 약 반지름 5mm, 또는 지름 10mm의 빔 둘레 w0에 대응하며, 이 빔 둘레는 z = 0(또는 광원(102)으로부터 50m)에서 발생한다. 그러면 원하는 범위 100m의 zobject에서 빔 지름은  = 14mm이다. 빔 사이즈를 결정하는 이 예시들은 원하는 범위에 걸쳐 발산을 최소화하는 것을 목표로 한다.
= 14mm이다. 빔 사이즈를 결정하는 이 예시들은 원하는 범위에 걸쳐 발산을 최소화하는 것을 목표로 한다.
기술된 시스템은 환경 내에서 상대적인 움직임이나 변화를 모니터링하는데 유용하다. 예컨대, 자동차의 현장에서(땅, 공기, 물 또는 공간), 기술된 시스템은 예컨대 장애물이나 앞의 목표물과 같은 임의의 물체의 거리를 포함하는, 교통 조건들의 공간적 프로파일을 차량의 관점에서 추정할 수 있다. 차량이 움직임에 따라, 다른 위치에서 차량으로부터 보여지는 공간적 프로파일은 변화할 수 있고 재-추정될 수 있다. 다른 예시로서, 도킹(docking) 분야에서, 바람직한 시스템은 컨테이너선의 관점으로부터 도크의 공간적 프로파일을 추정할 수 있는데, 예컨대 컨테이너선과 도크의 특정 부분들 간의 근접도와 같은 것이고, 도크의 임의의 부분들과의 충돌 없이 성공적인 도킹을 용이하게 한다. 또다른 예시로서, 가시선 통신 분야, 예컨대 자유공간에서의 광학 또는 초단파 통신에서, 바람직한 시스템은 정렬 목적으로 사용될 수 있다. 트랜스시버(transceiver)가 움직였거나 움직일 때, 그것은 연속적으로 추적되어 광학 또는 초단파 빔을 정렬할 수 있다. 또다른 예시로서, 적용하는한 분야들은, 산업 계측 및 자동화, 현장 측량, 군사, 안전 모니터링 및 감시, 로보틱스 및 머신 비전(machine vision), 출력, 프로젝터, 조명, 다른 레이저 및 IR 비전 시스템들을 공격 및/또는 침수 및/또는 재밍(jamming)하는 것을 포함하나, 이에 한정되지 않는다.
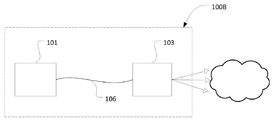
도 1a는 본 발명의 일 실시예에 따른 공간적 프로파일링 시스템(100A)의 일 배치를 도시한 것이다. 시스템(100A)은 광원(102), 빔 지향기(103), 광 감지기(104) 및 처리 유닛(105)을 포함한다. 도 1a의 배치에서, 광원(102)으로부터의 빛은 빔 지향기(103)에 의해 지향되어 일차원 또는 이차원의 방향으로 공간적 프로파일을 갖는 환경(110)으로 보내진다. 출력광이 물체나 반사면에 맞으면, 출력광의 적어도 일부분이 반사될 수 있고(실선 화살표로 표현됨), 물체나 반사면에 의해 예컨대 발산될 수 있고, 빔 지향기(103)로 되돌아와 광 감지기(104)에 수신된다. 처리 유닛(105)은 그 작동을 제어하기 위해 광원(102)과 작동상 결합된다. 처리 유닛(105)은 또한 반사면까지의 거리를 결정하기 위해 광 감지기(104)에 작동상 결합되는데, 빔 지향기(103)로 되돌아오는 반사광에 대한 왕복 시간을 판단함으로서 거리가 결정된다.
일 변형에서, 광원(102), 빔 지향기(103), 광 감지기(104) 및 처리 유닛(105)은 실질적으로 병치(collocated)된다. 예컨대, 자동화 차량 응용에서, 병치는 이 부품들이 차량의 영역 내에 또는 단일 하우징 내에 컴팩트하게 팩키지될 수 있도록 한다. 다른 변형에서, 도 1b에 도시된 것과 같은 공간적 프로파일링 시스템(100B)에서, 광원(102), 광 감지기(104) 및 처리 유닛(105)은 실질적으로 "중앙" 유닛(101) 내에 병치되며, 반면 빔 지향기(103)는 중앙 유닛(101)으로부터 떨어져 있다. 이 변형에서, 중앙 유닛(101)은 하나 또는 그 이상의 광섬유(106)를 통해 원격의 빔 지향기(103)에 광학적으로 결합된다. 이 예시는 원격의 빔 지향기(103)가, (수동 크로스-분산 광학계와 같은) 수동 요소들 만을 포함할 수 있고, 더 척박한 환경에 배치될 수 있도록 하는데, 왜냐하면 열, 습기, 부식 또는 물리적 손상과 같은 외부 자앵에 덜 예민하기 때문이다. 또다른 변형예로, 도 1c에 도시된 것과 같이, 공간적 프로파일링 시스템(100C)은 단일 중앙 유닛(101)과 다중 빔 지향기들(130A, 130B, 130C와 같은)을 포함할 수 있다. 다중 빔 지향기들의 각각은 각각의 광섬유들(106A, 106B, 106C와 같은)을 통해 중앙 유닛(101)에 광학적으로 결합될 수 있다. 도 1c의 예시에서, 다중 빔 지향기들은 다른 위치들 및/또는 다른 시야를 향해 위치될 수 있다. 달리 설명되지 않는 한, 이하의 설명에서는 병치된 변형례를 지칭하는 것이지만, 당업자라면 이하의 설명이 사소한 수정과 함께 다른 변형들에도 적용가능함을 인식할 수 있을 것이다.
필드 E를 진동해서 진행하는 광파는 수학적으로 아래와 같이 기술될 수 있다:
여기서 I(t)는 빛의 광도를,  는 장의 위상을, λk는 k번째 파장 채널의 중심 파장을, fa(t)는 k번째 파장 채널의 중심 광학 주파수로부터의 광학 주파수 편차를, 그리고 c = 299792458m/s는 빛의 속도를 나타낸다. 광원(102)은, 시간-가변 강도 프로파일 I(t) 및/또는 시간-가변 주파수 편차 fa(t)와 같은, 적어도 하나의 시간-가변 특성을 가지는 빛을 제공하도록 구성된다. 적어도 하나의 시간-가변 특성은, 복귀 및 감지 시에, 처리 유닛(105)으로 하여금 왕복 시간과 따라서 거리를 결정하도록 해주는 출력광 상의 시간-스탬프된 정보를 부여한다.
는 장의 위상을, λk는 k번째 파장 채널의 중심 파장을, fa(t)는 k번째 파장 채널의 중심 광학 주파수로부터의 광학 주파수 편차를, 그리고 c = 299792458m/s는 빛의 속도를 나타낸다. 광원(102)은, 시간-가변 강도 프로파일 I(t) 및/또는 시간-가변 주파수 편차 fa(t)와 같은, 적어도 하나의 시간-가변 특성을 가지는 빛을 제공하도록 구성된다. 적어도 하나의 시간-가변 특성은, 복귀 및 감지 시에, 처리 유닛(105)으로 하여금 왕복 시간과 따라서 거리를 결정하도록 해주는 출력광 상의 시간-스탬프된 정보를 부여한다.
일 배치에서, 광원(102)은 다중 파장 채널들(각각은 각각의 중심 파장 λ1, λ2, ... λN으로 표현됨) 중의 선택된 하나에서 시간-가변 강도 프로파일 I(t)을 갖는 출력광을 제공하도록 구성된다. 도 2a는 광원(102)의 그러한 배치 중의 하나의 예시를 도시한다. 이 예시에서, 광원(102)은 파장-가변 광원을 포함할 수 있으며, 파장-가변 레이저 다이오드와 같은 것이고, 레이저 다이오드에 적용되는 하나 또는 그 이상의 전류들(예컨대 전류를 레이저 공동(laser cavity)의 하나 또는 그 이상의 파장 가변 요소들로 주입)에 기초하여 가변적인 파장의 빛을 제공할 수 있다. 다른 예시에서, 광원(102)은 광대역 광원 및 가변 스펙트럼 필터를 포함하여 선택된 파장에서 실질적으로 연속-파동(continuous-wave, CW) 광도를 제공한다.
도 2a의 예시에서, 광원(102)은 출력광 상에 시간-가변 강도 프로파일을 부여하기 위한 모듈레이터(204)를 포함할 수 있다. 일 예시에서, 모듈레이터(204)는 반도체 광학 증폭기(semiconductor optical amplifier, SOA)거나 레이저 다이오드 상에 집적된 마하 젠더 모듈레이터(Mach Zehnder modulator)이다. SOA에 적용되는 전류는 시간에 따라 변화되어 시간에 따라 레이저에 의해 생성되는 CW광의 증폭을 변화시킬 수 있고, 이것은 다시 시간-가변 강도 프로파일을 가진 출력광을 제공할 수 있다. 다른 예시에서, 모듈레이터(204)는 레이저 다이오드에 대한 외장 모듈레이터(마하 젠더 모듈레이터나 외장 SOA 모듈레이터와 같은)이다. 또다른 예시에서, 집적된 또는 외장 모듈레이터를 포함하는 대신, 광원(102)은 여기 전류가 출력광 상에 시간-가변 강도 프로파일을 부여하기 위해 제어가능하게 주입되는 이득 매질(gain medium)을 가진 레이저를 포함할 수 있다.
또다른 배치에서, 도 2b에 도시된 바와 같이, 파장-가변 레이저(202)를 구비하는 대신, 광원(206)은 파장-가변 필터(210)가 뒤따른 광대역 레이저(208)를 포함한다. 또다른 예시에서(도시되지 않음), 광원(206)은 다중 레이저 다이오드들을 포함하며, 각각이 각각의 범위에 걸쳐 파장-가변이고 각각의 출력이 조합되서 단일 출력을 형성한다. 각각의 출력은 파장 조합기를 사용하여 조합될 수 있는데, 광 스플리터(optical splitter)나 AWG와 같은 것이다.
또다른 배치에서, 광원(102)은 다중 광학 채널들(λ1, λ2, ... λN) 중의 선택된 하나에서 시간-가변 주파수 가변 fa(t)을 갖는 출력광을 제공하도록 구성된다. 도 2c에서 그러한 광원(102)의 배치의 예시 중의 하나를 도시한다. 광 필드의 순간 광 주파수 f 및 순간 파장 λ은 빛의 동등한 물리적 특성-광 필드의 진동률-을 나타내고 파동 방정식 c = fλ에 의해 연관된다. 빛의 속도 c가 상수이기 때문에, f나 λ를 가변시키는 것은 필연적으로 다른 물리량을 변화시키게 된다. 유사하게, 도 2d에 도시된 예시에서처럼, λk나 fd 중의 하나를 변화시키는 것은 다른 물리량을 변화시키는 것으로 기술될 수 있다. 특히, fa(t)와 λk는 아래와 같이 연관된다:
실제로, 광원(102)의 fa(t)와 λk의 변화는 예컨대 전류를 레이저 다이오드에 주입하는 것에 의해, 단일 제어에 의해, 예컨대 광원(102)의 파장을 조절하는 것에 의해 영향받을 수 있다. 그러나, 명확하게 하기 위해, 이하의 설명에서는 주파수 편차 fa(t)를 그 중심 광학 주파수로부터 단일 파장 채널 내의 광학 주파수 내의 편차로, λk의 변화는 광원(102)으로 하여금 하나의 파장 채널에서 다른 파장 채널로 도약하는 것으로 한다. 예컨대, 광원(102)의 작고 실질적으로 연속적인 파장 변화는 시간-가변 주파수 편차 fa(t)를 야기하는 것으로 기술되는 반면, 광원(102)의 더 크고 계단진 파장 변화는 광원(102)으로 하여금 λk로부터 λk+1로의 도약을 야기하는 것으로 기술된다.
또다른 배치에서, 광원(102)은 출력광에 시간-가변 강도 프로파일 I(t)과 시간-가변 주파수 편차 fa(t) 모두를 제공하는 것으로 구성될 수 있다. 도 2a 및 2b에 보여진 예시들은 모두 광원(102)의 그러한 배치에서 사용하기에 적합하다. (a) 시간-가변 강도 프로파일 I(t)과 (ㅠ) 시간-가변 주파수 편차 fa(t)에 대한 위의 설명은 광원(102)의 그러한 배치에 적용된다.
광원(102)은 선택된 하나 또는 그 이상의 다중 파장 채널들에 빛을 제공하도록 구성된다. 일 배치에서, 광원(102)은 한 번에 단일한 선택된 파장 채널을 제공하며, 파장-가변 레이저와 같은 것이다. 이 배치에서, 설명된 시스템(100)은 한 번에 하나의 선택된 파장 채널에 기초하여 특정 방향으로 빛을 조종할 수 있다. 다른 배치에서, 광원(102)은 하나 또는 다중의 선택된 파장 채널들을 제공하는데, 가변 필터에 따른 광대역 광원이나, 단일 또는 다중의 선택된 파장 채널들을 포함하는 가변 패스 밴드(pass band)와 같은 것이다. 한 번에 하나의 선택된 파장 채널이 사용될 때, 광 감지기(104)는 다중 파장 채널들의 범위 내의 임의의 파장을 감지하는 에벌란시 광다이오드(avalanche photodiode, APD)를 포함할 수 있다. 다중의 선택된 파장 채널들이 한 번에 사용되는 경우에, 광 감지기(104)는 파장-민감 감지 시스템을 포함할 수 있는데, 각각이 특정 파장 채널들에 전용인 다중 APD들을 사용하거나, 또는 다중 파장 채널들에 단일 APD를 사용하는 것과 같은 것들이며, 각 채널은 그들의 시간-가변 특성에 기초하여 구분가능하게 감지가능하다(예컨대, 각각 1550.01, 1550.02, 1550.03nm ... 채널들에 대응하는, 모듈레이션 주파수 21MHz, 22MHz, 23MHz와 같은 상이한 사인파형 모듈레이션에 기초하여). 이하의 설명에서는 빛의 방향을 한 번에 단일한 선택된 파장 채널을 제공하는 것으로 하나, 당업자라면 사소한 수정으로 그 설명을 한 번에 다중의 선택된 파장 채널에 제공하는 빛의 지향에도 적용가능함을 인식할 것이다.
파장-가변 레이저(202)(예컨대, 그 파장)로 및 모듈레이터(204)(예컨대, 파형의 변조) 모두와 같은, 광원(102)의 작용은, 처리 유닛(105)에 의해 제어될 수 있다.
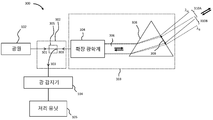
도 3은 도 1a에서 개시된 시스템의 예시(300)를 도시한 것이다. 이 예시에서, 시스템(300)은 출력광(301)을 광원(102)으로부터 빔 지향기(103)로 그리고 반사광(303)을 빔 지향기(103)로부터 광 감지기(104)로 전송하도록 구성된 광 전송 어셈블리(302)를 포함한다.
광 전송 어셈블리(302)는 2D나 3D 도파관 형태의 광섬유나 광회로(예컨대 광집적 회로)와 같은 광학 도파관을 포함한다. 이하에서 더 설명되는 것과 같이, 광원(102)으로부터의 출력광은 환경으로 지향되는 빔 지향기(103)로 제공된다. 일부 실시예에서, 빔 지향기(103)에 의해 수집된 임의의 반사광은 추가적으로 광 감지기(104)로 지향될 수 있다. 일 배치에서, 광 혼합 감지를 위해, 광원(102)으로부터의 빛은 또한 광원(102)으로부터 광 감지기(104)로 직접 광 경로(도시되지 않음)를 통해 광 처리 목적을 위해 광 감지기(104)에도 제공된다. 예컨대, 광원(102)으로부터의 빛은 먼저 샘플러(예컨대, 90/10 가이드된-광학 커플러)에 진입하는데, 거기서 빛의 주요부분(예컨대 90%)은 빔 지향기(103)로 제공되고 빛의 남은 샘플 부분(예컨대 10%)은 직접 경로를 통해 광 감지기(104)로 제공된다. 다른 예시에서, 광원(102)으로부터의 빛은 먼저 광 스위치의 입력 포트로 진입하여 두 개의 출력 포트들 중의 하나로부터 탈출하는데, 여기서 하나의 출력 포트는 빛을 빔 지향기(103)로 지향시키고 다른 출력 포트는 처리 유닛(105)에 의해 정해진 시간에 빛을 광 감지기(104)로 재-지향시킨다.
광 전송 어셈블리(302)는 제1 포트로부터 수신된 출력광을 제2 포트에 결합시키고 제2 포트로부터 수신된 출력광을 제3 포트에 결합시키는 는 3-포트 요소(305)를 포함한다. 3-포트 요소는 광 순환기나 2x2 커플러(제 4 포트가 사용되지 않음)를 포함할 수 있다.
일 배치에서, 광 전송 어셈블리(302)는 제1 및 제2 선택된 파장 채널들에서의 출력광(301)을 전달하기 위한 광원(102)과 빔 지향기(103) 사이의 아웃바운드 유도-광학 경로(outbound guided-optic route)와 (같은 시간에 또는 상이한 시간에) 제1 및 제2 선택된 파장 채널들에서 반사광(303)을 전달하기 위한 빔 지향기(102)와 광 감지기(104) 사이의 인바운드 유도-광학 경로(303)를 포함한다. 유도된-광학 경로들은 각각이 광섬유 경로거나 광회로 경로 중의 하나일 수 있다.
이 배치에서 빔 지향기(103)는 빔 확장 광학계(304)를 포함하며, 피그테일된 시준기(pigtailed collimator)와 같은 것으로, 도파 형태의 출력광(301)을 빔 사이즈를 포함하는 빔 형상을 갖는 자유 공간 형태 내의 확장된 빔(306)으로 확장하기 위한 것이다. 실선과 파선은 상이한 선택된 파장 채널들에서 확장된 빔들을 나타내며, 설명을 위해 약간 오프셋된 것으로 도시되었다. 실제로는 그들은 공간 내에서 실질적으로 또는 완전히 오버랩되거나 오버랩되지 않을 수 있다. 이어지는 그림에서 실선과 파선은 비슷한 방식으로 표현되었다. 빔 지향기(103)는 빛의 파장에 기초하여 빛의 각분산을 제공하는 각분산 요소(angularly dispersive element)(308)를 더 포함한다. 각분산 요소(308)는 파장에 따라, 확장된 빔(306)을 적어도 제1 방향(310A) 및 제2 방향(310B)으로 제1 차원을 따라 지향하도록 구성된다. 단순화를 위해 각분산 요소(308)가 삼각형 요소의 형태로 개념적으로 도시되었으나, 그 실제 형태는 상이할 수 있고 복수의 요소들을 포함할 수 있다. 각분산 요소(308)의 예제는 하나 또는 그 이상의 회절 격자를 포함하고, 그 중의 일부 예시들이 도 4a 내지 4j와 관련하여 도시되고 더 설명된다. 제1 방향(310A)은 제1 선택된 파장 채널 λA에서의 출력광에 대응한다. 제2 방향(310B)은 제1 선택된 파장 채널 λB에서의 출력광에 대응한다.
이 배치에서, 빔 지향기(103)는 개구(aperture)(309)를 포함하며, 이 배치에서는 각분산 요소(308)의 출구 표면 상의 2중 머리 화살표로서 도시되었다. 비록 개구(309)가 각분산 요소(308)의 출구 표면 상에 있는 것으로 도시 및 설명되었지만, 빔 지향기(103)의 개구는 광 경로를 따라 임의의 지점 상에 그리고 빔 지향기(103)가 빛을 하나 또는 그 이상의 복수의 방향들로 지향시키는 임의의 접점이나 면 상에 (예컨대 각분산 요소(308)의 진입 표면에) 있을 수 있다. 빔 지향기(103)는 출력광(301)을 공간적으로 지향하도록 구성되어 개구(309)를 통해 환경으로 그리고 환경에 의해 반사된 출력광(301)의 적어도 일부분인 반사광(301)을 수신하도록 구성된다. 출력광(103)은 두 개의 방향(310A 및 310B)으로 지향되는데, 각각은 파장 채널과 연관되며, 개구(309) 내에서 공간적으로 오버랩된다. 특히, λA에서의 출력광(301)은 제1 방향(310A)에서 개구(309)의 제1 부분(실선으로 마킹됨)을 통해 지향되는 반면, λB에서의 출력광(301)은 제2 방향(310B)에서 개구(309)의 제2 부분(파선으로 마킹됨)을 통해 지향된다. 각각 방향 310A와 310B로 지향된 빔들 사이의 공간적 오버랩은 확장된 빔(306)이 개구(309)의 사이즈의 활용을 실질적으로 최대화하는 것이 가능할만큼 상당할 수 있다. 이 가능성은 2개의 별개의 광원들이 그들 각각의 광선들을 상이한 방향들로 지향시키도록 각도지어져서 각각의 지향된 광선들이 개구의 약 절반 또는 그 이하를 활용하도록 하는 것과 대비된다. 이 대조는 많은 숫자의 광원(예컨대 10개)이 그들 각각의 광선을 (예컨대 10개의) 상이한 방향들로 지향시키도록 각도지어져서 각각의 지향된 광선들이 개구 사이즈의 일부분(예컨대 1/10) 밖에 활용하지 못할 때에는 더 극명해진다. 비교하면, 본 발명에 따른 상이하게 지향된 광선들에 대한 빔 지향기의 개구 사이즈의 실질적인 활용의 최대화에 의해, 빔 발산이 바람직하게 최소화된다.
일부 배치에서, 유사한 오버랩 또는 유사한 상당한 오버랩이 이들 또는 다른 방향들로부터 수신된 반사광(303)에 대하여 존재한다. 즉, λA에서의 반사광(303)은 제1 방향(310A)과 연관된 제3 방향으로부터 개구(309)의 제3 부분을 통해 수신되는 반면, λB에서의 반사광(303)은 개구(309)의 제4 부분을 통해 수신되며, 제3 부분과 공간적으로 오버랩되는, 제2 방향(310B)과 연관된 제4 방향으로부터 수신된다. 일 예시에서(도 5에 도시된 것과 같은), 출력광과 반사광은 개구(309)의 공간에서 오버랩되지 않거나 또는 실질적으로 오버랩되지 않는다. 대안적인 예시에서(도 6에 도시된 것과 같은), 출력광과 반사광은 또한 개구(309)의 공간에서 오버랩되거나 실질적으로 오버랩될 수 있어서, 개구(309)의 제1 부분, 제2 부분, 제3 부분 및 제4 부분이 공간 내에서 오버랩되거나 실질적으로 오버랩될 수 있다.
일 배치에서, 각각 방향 (310A)과 (310B)으로 지향된 빔들 사이의 공간적 오버랩은 영역 내에서 90%와 100% 사이의 임의의 값일 수 있다. 다른 배치에서, 영역 내에서 80%와 90% 사이의 임의의 값일 수 있다. 또다른 배치에서, 영역 내에서 70%와 80% 사이의 임의의 값일 수 있다. 또다른 배치에서, 영역 내에서 60%와 70% 사이의 임의의 값일 수 있다. 또다른 배치에서, 영역 내에서 50%와 60% 사이의 임의의 값일 수 있다. 당업자라면 공간적 오버랩이 0%와 50% 사이의 값일 수도 있음을 인식할 것이다. 공간적 오버랩의 수준은 인접한 파장 채널들이나 방향이 작은 각도 차이를 갖는 경우에 더 큰 경향을 가질 수 있으며, 멀리 떨어진 파장 채널들이나 방향이 큰 각도 차이를 갖는 경우에 적은 경향을 가질 수 있다.
공간적 오버랩은 몇가지 측정들 중의 하나에 기초하여 정량화될 수 있다. 일 배치에서, 정량화는 최대 광학 강도의 특정 비율에서 오버랩된 빔들의 폭 측정에 기초한다. 에컨대, 폭 측정은 최대값의 절반에서 전체 길이(full-width at half maximum, FWHM)이나 최대 강도의 1/e2에서 전체 너비일 수 있다. 대안으로서, 정량화는 오버랩된 빔들의 전력 측정에 기초할 수 있다. 전력 측정은 빔들의 오버랩된 영역들 내에 포함된 조합된 광학 전력의 부분일 수 있다. 공간적 오버랩을 정량화하기 위한 특정 측정의 선택은 빔 프로파일에 의존한다. 예컨대, 가우시안 빔들의 오버랩은, 단일 강도 피크를 갖는데, FWHM 측정을 사용하여 더 적절하게 정량화될 수 있다. 다른 예시에서, 고차 빔들의 오버랩은, 다중 강도 파크들을 가지는데, 부분 광 전력 측정을 사용하여 더 적절하게 정량화될 수 있다.
일 실시예에서, 방향 (310A)와 (310B)는 광원(102)의 연속 파장 채널들과 연관될 수 있다(즉, 개시된 시스템의 최소 파장 변화는 파장 채널들을 통해 스텝핑함으로써 출력광(301)을 지향시키도록 구성된다). 또다른 배치에서, 그러한 배치는 이하에서 설명되는 광 인터리버(optical interleaver)를 사용하는 것을 포함하는데, 방향 (310A)와 (310B)는 광원(102)의 비연속 파장 채널들과 연관될 수 있다.
일부 배치들에서, 출력광(301)은 미리 정해진 빔 프로파일을 갖도록 조정된다. 미리 정해진 빔 프로파일을 가지는 전파중인 빔의 발산은, 공간 회절 광학을 사용하여 계산될 수 있으며, 따라서 알려져 있다. 예컨대, 가우시안 빔(즉, 빔 축으로부터의 반경 변위가 가우시안 강도 분포를 가지는 빔)에 대하여, 범위 z에서 빔 반경 w(즉, 강도가 축에서의 값에 비해 1/e2로 떨어지는 반경 변위)는  로 주어지고, 여기서 w0는 빔 둘레이고
로 주어지고, 여기서 w0는 빔 둘레이고  =
=  /λ는 레일리 범위이다. 다른 빔 프로파일에 대하여, 공간 회절 광학 계산이 범위 z에서 qla 프로파일을 결정하기 위해 사용될 수 있다. 역전파에 대해서 유사한 계산이 사용되어 주어진 원하는 빔 프로파일에 대한 출력 빔 프로파일이나, 광 감지기(104)에서 원하는 빔 프로파일의 주어진 그룹이나 범위를 결정할 수 있다. 일부 배치에서, 제1 선택된 파장 채널 λA에서의 출력광(301)은 제2 선택된 파장 채널 λB에서의 출력광(301)의 그것과 실질적으로 동일한 빔 형상을 갖도록 조절될 수 있다. 조절은 다중 파장 채널들의 범위 내에서 다중 파장들과 함께 사용하기 위해 최적화된 빔 형상기(beam shaper)에 의해 달성될 수 있다. 예컨대, 다양한 파장 채널들에서의 출력 빔들은 적어도 4mm의 빔 둘레를 갖도록 조절될 수 있다. 다른 예시에서, 다양한 파장 채널들에서의 출력 빔들은 적어도 10mm의 빔 둘레를 갖도록 조절될 수 있다.
/λ는 레일리 범위이다. 다른 빔 프로파일에 대하여, 공간 회절 광학 계산이 범위 z에서 qla 프로파일을 결정하기 위해 사용될 수 있다. 역전파에 대해서 유사한 계산이 사용되어 주어진 원하는 빔 프로파일에 대한 출력 빔 프로파일이나, 광 감지기(104)에서 원하는 빔 프로파일의 주어진 그룹이나 범위를 결정할 수 있다. 일부 배치에서, 제1 선택된 파장 채널 λA에서의 출력광(301)은 제2 선택된 파장 채널 λB에서의 출력광(301)의 그것과 실질적으로 동일한 빔 형상을 갖도록 조절될 수 있다. 조절은 다중 파장 채널들의 범위 내에서 다중 파장들과 함께 사용하기 위해 최적화된 빔 형상기(beam shaper)에 의해 달성될 수 있다. 예컨대, 다양한 파장 채널들에서의 출력 빔들은 적어도 4mm의 빔 둘레를 갖도록 조절될 수 있다. 다른 예시에서, 다양한 파장 채널들에서의 출력 빔들은 적어도 10mm의 빔 둘레를 갖도록 조절될 수 있다.
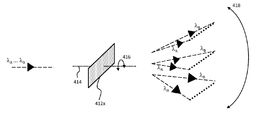
도 4c는 하나 또는 그 이상의 다중 회절 격자들(412)을 포함하는 각분산 요소(308C)의 예시를 도시한 것이다. 비록 이 예시가 3개의 회절 격자들을 가진 배치를 도시하고 있으나, 당업자라면 더 많거나 더 적은 회절 격자들이 사용될 수 있음을 인식할 수 있을 것이다. 각각의 추가적인 회절 격자는 추가격인 회절을 제공할 수 있으며, 따라서 상이하게 지향된 빔들의 더 큰 각 분리를 제공한다. 상이한 회절 격자들의 사용은 또한 각분산 요소(308c)를 설계함에 있어 더 큰 자유도를 허락할 수 있다(예컨대 스침 입사(grazing incidence) 보다는 수직 입사(normal incidence)를 하는 각도를 선택함으로써 반사방지 코팅 조건을 완화시키는 것). 그러나, 각각의 추가적인 회절 격자는 또한 감쇄를 증가시킨다(예컨대 격자의 유한한 회절 효율을 통해). 각 회절 격자는 파장에 의존하는 약간 다른 각도(예컨대 (410A)와 (410B))로 지향된 출력 빔들에 의해 형성되는 적어도 하나의 회절 차수(예컨대 N=1 차수)를 생성하도록 구성된다. 두 개의 방향 (410A)와 (410B)로 지향된 출력광은, 각각이 각각의 파장 채널과 연관되고, 격자(412C)를 통과한 뒤 개구(409C) 내에서 공간적으로 오버랩된다. 도 3에 도시된 각분산 요소(308)와 유사하게, 회절 격자(412)는 확장된 빔(406)을 파장에 따라, 제1 차원을 따라 적어도 제1 방향(410A)와 제2 방향(410B)으로 지향시키도록 구성된다. 제1 방향(410A)은 제1 선택된 파장 채널 λA에서의 출력광에 대응한다. 제2 방향(410B)은 제1 선택된 파장 채널 λB에서의 출력광에 대응한다. 도 4c는 하나의 회절 차수를 생성하는 각각의 회절 격자를 도시한다. 각각의 격자들은 하나 또는 그 이상의 다른 회절 차수들을 생성하거나 억누를 수 있다(예컨대 N = 0 차수 및/또는 N = -1 차수). 도시된 것처럼 각 격자의 개구에서 상이하게 지향된 빔들 사이에는 상당한 오버랩이 있다. 이 배치에서, 격자(412A)는 확장된 빔(406)을 수신하고, 빔을 격자(412B)를 향해 지향시키고, 이것은 다시 빔을 격자(412C)로 지향시킨다. 각각의 회절 격자에서, 빔은 점점 각도가 분산된다. 다중 회절 격자들의 사용은 예컨대 단일 회절 격자의 배치와 비교할 때 각도 분리를 증가시킨다. 게다가, 다중 회절 격자들은 광선을 단일방향 빔 경로로 배열되도록 한다(예컨대 도 4c에 도시된 것처럼 시계 방향으로 격자 (412A), (412B) 및 (412C)를 통하거나 또는 반시계방향으로). 단일방향 빔 경로는 광 경로의 폴딩(folding)을 용이하게 하고 각분산 요소(308)의 사이즈 따라서 전체적인 시스템 크기를 감소시킨다.
도 4d, 4e, 4f 및 4g는 각분산 요소(308D, 308E, 308F 및 308G)의 다른 예시들을 도시한다. 이 예시에서 각각의 각분산 요소들은 하나 또는 그 이상의 다중 회절 격자들(412) 및 하나 또는 그 이상의 빔 보상기(414)를 포함한다. 각분산 요소(308D)는 3개의 회절 격자들(412A, 412B, 412C)과 하나의 빔 보상기(414)를 포함한다. 각분산 요소(308E)는 3개의 회절 격자들(412A, 412B, 412C)과 하나의 빔 보상기(414)를 포함한다. 각분산 요소(308D)는 3개의 회절 격자들(412A, 412B, 412C)과 2개의 빔 보상기(414A, 414B)를 포함한다. 각분산 요소(308G)는 2개의 회절 격자들(412A, 412B)과 2개의 빔 보상기(414A, 414B)를 포함한다.
회절 격자(들)(412)은 물리적으로 빔 보상기(들)(414)과 분리되어 있다. 물리적 분리는 열 팽창 관리를 쉽게 만드는데, 예컨대 상이한 물질 또는 코팅 요구를 완화할 수 있고, 그렇지 않았다면 회절 격자(들)(412)이 빔 보상기(들)(414)과 밀접하게 접촉하는 경우보다 더 엄격해졌을 것이다. 일부 배치들에서, 빔 보상기(들)(414)은 각각이 프리즘 형태일 수 있다. 빔 보상기(들)(414)은 빔 프로파일 및/또는 빔 사이즈와 같은 빔 특징들 상의 파장 의존성을 교정하도록 구성된다. 일부 배치에서, 빔 보상기(들)(414)은 또한 추가적인 분산을 제공한다. 두 개의 방향 (410A)와 (410B)으로 지향된 출력광은, 각각이 각각의 파장 채널과 연관되는데, 각각 개구 (409D)(빔 보상기(414)의 출구면에서), (409E)(격자 (412C)의 통과 후에), (409F)(격자 (412C)의 통과 후에) 또는 (409G)(격자 (412C)의 통과 후에) 내에서 공간적으로 오버랩한다.
도 4d에서, 빔 보상기(414)는 인접한 격자들 사이에 위치하지 않는다. 반면 도 4e, 4f, 4g에서, 빔 보상기(414)나 빔 보상기 (414A), (414B)는 하나 또는 그 이상의 인접한 격자들 쌍의 사이에 위치한다. 예컨대, 단일-프리즘 배치에 대하여, 프리즘은 격자들(412A)와 (412B) 사이에 위치할 수 있다(도 4e에 도시된 것처럼). 2개의 프리즘 배치에서(도 4f에 도시된 것처럼) 하나의 프리즘은 격자들 (412A), (412B) 사이에 있을 수 있고 다른 프리즘은 (412B)와 (412C) 사이에 있을 수 있다. 도 4d의 배열과 비교하여,도 4e~4g의 배열은 공간 절약을 용이하게 한다. 다중 회절 격자 및/또는 다중 빔 보상기의 사용은 구성요소의 광학적 요구를 완화시킨다. 예컨대, (1개가 아닌) 2개의 회절 격자 또는 빔 보상기를 사용함으로써, 회절 격자 또는 빔 보상기 마다 요구되는 각도 발산이 감소될 수있다. 보다 많은 회절 격자들 및/또는 빔 보상기들의 사용은 각분산 요소(408)를 설계하는데 있어서(예컨대, 스침 입사보다는 수직 입사에 대한 각도를 선택함으로써 반사-방지 코팅 요건을 완화시킴으로써) 더 많은 자유도를 허용할 수 있다.
각분산 요소(예컨대 (308)과 (408))는 출력광(301)과 반사광(303) 모두를 수신 및 지향하도록 구성된다. 비록 도 3 및 도 4가 각분산 요소가 2방향성(bidirectional)인 것으로 도시하였지만, 출력 및 반사광 경로들을 필수적으로 오버랩되어야 하는 것이 아니다. 달리 말하면, 일부 배치들에서, 출력 및 반사광은 개구((309) 및 (409))에서 실질적으로 오버랩되는 반면, 다른 배치에서는 출력 및 반사광이 개구((309) 및 (409))에서 실질적으로 오버랩되지 않는다. 도 5는 환경의 공간적 프로파일에서 추정을 용이하게 하기 위한 부분적인 시스템(500)의 예시를 도시한 것이다. 부분적인 시스템(500)은 도 3에 도시된 각분산 요소(308)를 포함한다. 전술한 바와 같이, 각분산 요소(308)가 단순함을 위해 삼각형 요소의 형태로 개념적으로 도시되었지만, 그 실제 형태는 다를 수 있고 다중 요소들을 포함하는데, 도 4c 내지 4g에 도시된 각분산 요소들과 같은 것이다. 이 예시에서, 광 전송 어셈블리(302)는 아웃바운드 광섬유 경로(outbound fibre-optic route)(예컨대, 단일-모드 섬유(302A)) 및 인바운드 광섬유 경로(inbound fibre-optic route)(에컨대, 멀티-모드 섬유(302B))를 포함한다. 광원(도시되지 않음)으로부터 아웃바운드 광섬유 경로로 전송된 빛은 확장 광학계(304A)(예컨대 피그테일된 시준기)에 의해 확장되고 각분산 요소(308)에 의해 수신된다. 각분산 요소(408)는 그 후 확장된 빛을 그 파장에 기초한 방향으로 출력광으로 지향한다. 단순함을 위해, 각분산 요소(308) 내의 광 경로들은 도시되지 않았다. 게다가, 오직 하나의 선택된 파장 채널(예컨대 λA)에서의 광 경로만이 보여진다. 반사광(303)은, 발산된 것으로 개념적으로 도시되었는데, 각분산 요소(308)에 의해 수신되고 시준 광학계(304B)(예컨대 피그테일된 시준기)를 통해 인바운드 광섬유 경로로 되돌려져서 광 감지기(도시되지 않음)으로 전송된다. 빔 발산을 고려하면, 인바운드 광섬유 경로의 개구수(numerical aperture)는 집광을 향상시키기 위해 아웃바운드 광섬유 경로의 그것보다 클 수 있다. 도 5에 도시되지는 않았지만, 제1 차원에 걸쳐 상이한 방향들로 지향된 상이한 파장 채널들에서 출력 빔들(301) 사이에 각분산 요소(409)의 개구(도시되지 않음)에 공간적 오버랩이 존재한다. 게다가, 유사한 공간적 오버랩이 제1 차원에 걸쳐 상이한 방향들로 지향된 상이한 파장 채널들에 반사 빔들(303) 사이에 존재한다.
일 배치에서, 도 6에 도시된 것과 같이, 아웃바운드 광섬유 경로(302A)와 인바운드 광섬유 경로(302B)의 부분들이 병치될 수 있다. 예컨대, 병치된 광섬유 경로는 이중 클래드 섬유(double clad fibre)(602)일 수 있으며, 코어(core), 내부 클래딩 층 및 외부 클래딩 층을 포함한다. 코어와 내부 클래딩 층은 함께 보다 작은 개구수를 가진 단일-모드 섬유처럼 행동하며, 반면 내부 클래딩 레이어와 외부 클래딩 레이어는 함께 더 큰 개구수를 가진 다중-모드 섬유처럼 행동한다. 이 병치 배치(600)에서, 이중-클래드 섬유(602)는 도 3에 도시된 확장 광학계(304)와 3-포트 요소(305) 사이에 빛을 전송하도록 구성된다. 광원(102)과 3-포트 요소(305) 사이의 광섬유 경로는 여전히 출력광(301)을 전송하기 위하여 단일-모드 섬유(302A)의 형태를 취하는 반면, 광 감지기(104)와 3-포트 요소(305) 사이의 광섬유 경로는 반사광(303)을 전송하기 위하여 여전히 다중-모드 섬유(302B)의 형태를 취한다. 비록 도 6 상의 설명이 광섬유 변형에 관하여 되어 있지만, 당업자는 사소한 수정 없이 이 설명이 광회로 변형과 같은 다른 광학 도파관 변형에 적용가능할 수 있음을 인식할 것이다.
이제부터 (수직 방향과 같은) 제1 차원에 걸쳐 빛을 지향시킴으로서 공간적 프로파일의 추정을 용이하게 하는 것과 관련된 설명을 개시한다. 본 발명은 또한 실질적으로 제1 차원에 수직인(수평 방향과 같은) 제2 차원에 걸쳐 빛을 지향시키는 확장을 상정한다. 일 배치에서, 도 3의 예시에서 도시된 각분산 요소(308)는, 빛을 그 파장에 기초하여 제1 차원으로 지향하는데, 제1 차원에 수직인 제2 차원에 걸쳐 제어가능하게 빛을 반사시키는 각 제어가능 반사 요소(angularly adjustable reflective element)를 포함할 수 있다. 각도 조절은 광 포지셔닝 시스템(optical positioning system)에 의하여 제어될 수 있다. 일 예시에서, 광 포지셔닝 시스템은 미소전자기계시스템(MEMS)일 수 있다. MEMS는 빛을 반사하는 개별적으로 작동가능한 거울들의 배열을 포함한다. 다른 예시에서, 광학 포지셔닝 시스템은 갈바노미터 스캐닝 시스템(galvanometer scanning system)이다. 일부 다른 예시들과 비교하면, 갈바노미터 스캐닝 시스템은 상대적으로 컴팩트하다. 또다른 예시에서, 광학 포지셔닝 시스템은 폴리고널 스캐닝 시스템(polygonal scanning system)이다. 플리고널 스캐닝 시스템은 회전가능한 굴절 요소를 포함하는데, 삼각 또는 사각 프리즘과 같은 것이고, 또는 거울과 같은 회전가능한 반사 요소를 포함하는데, 축 주위로 회전함에 따라 그 회전 속도에 기초한 스캐닝 빈도로 제2 차원에 걸쳐 빛을 지향하는 것이다. 한가지 형태에서, 공간적 프로파일의 추정을 용이하게 하기 위한 시스템은 1개 차원에 대한 파장 채널을 제어함으로써 그리고 다른 차원에 대한 각 조절가능 반사 요소의 각도를 조절함으로써 2개 차원으로 빛을 지향시키도록 구성된다. 처리 유닛(105)은 파장 조절을 위한 광원(102)과 각도 조절을 위한 각 조절가능 반사 요소 모두에 작동상 결합될 수 있다.
다른 배치에서, 도 4c, 4d, 4e, 4f, 4g 중의 임의의 도면에서 임의의 하나 또는 그 이상의 회절 격자들(412A, 412B 및 412C, 이하에서는 412x라 함)은 제1 차원에 수직인 제2 차원에 출력광을 지향하기 위해 틸팅축(tilting axis) 주위로 제어가능하게 틸팅될 수 있다. 틸팅축은 광 전파 방향에 실질적으로 평행할 수 있다. 다중 회절 격자들 중의 오직 하나만 제어가능하게 틸팅되는 경우에, 제어가능하게 틸팅되는 회절 격자는 환경(110)으로 지향되기 전에 빛이 마지막으로 통과하는 회절 격자일 수 있다. 예컨대, 도 4c에서, 회절 격자(412C)는 틸팅축(414) 주위로 틸팅될 수 있다. 다른 예시에서, 도 4d에서, 회절 격자(412C)는 틸팅축(414) 주위로 틸팅될 수 있다. 다른 예시에서, 도 4e에서, 회절 격자(412C)는 틸팅축(414) 주위로 틸팅될 수 있다. 다른 예시에서, 도 4f에서, 회절 격자(412C)는 틸팅축(414) 주위로 틸팅될 수 있다. 다른 예시에서, 도 4g에서, 회절 격자(412B)는 틸팅축(414) 주위로 틸팅될 수 있다. 당업자라면 틸팅축(414)이 필수적으로 회절 격자(412x)의 중심을 관통할 필요가 없음을 인식할 것이다. 예컨대, 틸팅축(414)은 회절 격자(412x)의 중심으로부터 오프셋될 수 있다. 게다가, 틸팅축(414)는 회절 격자(412x)를 반드시 관통할 필요가 없다.
도 4h에 도시된 것처럼, 회절 격자(412x)는 틸팅축(414) 근처로 조절가능하게 틸팅가능(tiltable)하고, 틸팅축은 입력 빔의 방향에 평행하거나 및/또는 회절 격자(412x)의 선들에 의해 정의되는 평면에 수직이다. 회절 격자(412x)의 틸팅가능 각도(416)의 조절은 제2 차원을 따른 출력 빔의 방향(418)의 대응하는 변화를 야기한다. (예컨대 출력 빔의 방향들(418)의 범위와 비교한 회절 격자(412x)의 틸팅가능 각도들(416)의 범위 사이의 비교에 기초한) 감도는 격자 틸팅의 각도마다 제2 차원에 걸칠 출력 빔 방향의 약 0.5 내지 2도 사이의 범위일 수 있다. 한가지 경우에, 80도를 넘는 빔 방향이 40도의 단일 회절 격자를 틸팅시킴으로서 달성될 수 있다(즉, 2도의 감도). 다른 경우에는, 120도 이상의 빔 방향이 단일 회절 격자를 180도만큼 틸팅시킴으로서 달성될 수 있다(즉, 0.67도의 감도).
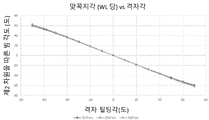
격자 틸팅 각도의 변화가 주로 제2 차원에서의 빔 방향을 낳는 반면, 그것은 또한, 상대적으로 작은, 제1 차원(즉, 파장 의존 차원)에 걸친 빔 방향의 변화도 낳을 수 있다. 이 현상은 하나의 배치에서 유리하게는 제1 차원을 따른 빔 방향의 범위를 연장할 수 있다. 예컨대, 도 4i 및 4j에 도시된 것처럼, 회절 격자 412x의 틸팅가능 각도를 140도를 넘게 조절하면 출력 빔이 제2 차원을 따른 120도를 초과하는 지향을 낳지만(도 4i), 제1 차원에 걸쳐 총 30도의 빔 방향 중 제1 차원을 따른 5도 이상의 결과를 야기한다(도 4j).
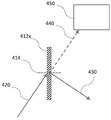
일 배치에서, 빔 지향기(103)는 틸팅가능 회절 격자(412x)를 통한 비-회절된 광도에 기초하여 틸팅가능 각도(416)를 추정하도록 구성된다. 틸팅가능 회절 격자(412x)를 틸팅축(414)의 주위로 틸팅가능각(416) 만큼 틸팅되게 하는 것은 비 0차 회절 차수(들)(430)을 향한 빛의 회절의 효율에 영향을 준다. 이 효율의 변화는 회절 격자(412x)의 0차 차수(440)를 통한 광도의 변화에서 나타난다. 도 4a에 도시된 것처럼, 광 감지기(450)는 회절 격자(412x)를 향하고 넘어 지향된 빛(420)의 경로 상에 위치될 수 있다. 광 감지기(450)는 0차 차수(440)를 따라 틸팅가능한 회절 격자(412x)를 통해 빛의 강도를 측정하며, 그에 기초하여 틸팅가능각(416)이 추론될 수 있다. 도 4b는 0차 차수 광도와 틸팅가능 회절 격자(412x)의 관계의 예시를 도시한 것이다. 0차 차수 광도는 틸팅가능 회절 격자(412x)가 축(414) 주위로 회전됨에 따라 일반적으로 사인파형 형태의 주기성을 가지고 변화한다. 예컨대, 연속적인 국소 최소값은 0차 차수를 따라 측정된 가장 낮은 광도들을 나타낸다. 이 국소 최소값은 틸팅가능한 회절 격자(412x)의 180도의 회전에 의해 분리된다. 도 4b를 캘리브레이션(calibration)으로 사용하여, 틸팅가능각(416)이 0차 차수 광도의 측정에 기초하여 추정될 수 있다.
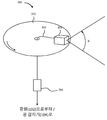
도 7은 2개 차원들에 걸쳐 빛을 지향하여 공간적 프로파일의 추정을 용이하게 하는 시스템의 부분적인 다른 배치(700)를 보여준다. 시스템(700)은 빔 지향기(103) 지향기를 포함하고 이것은 다시 각각 도 3 및 도 4에서 도시된, 각분산 요소 (308) 또는 (408)을 포함하는데, 그 파장에 기초하여 (예컨대 수직 방향으로) 제1 차원에서 빛을 지향한다. 시스템(700)에서, 각분산 요소 (308) 또는 (408)은 회전가능한 지지대(702) 상에 지지되거나 장착된다. 회전가능한 지지대(702)는 제1 차원에 실질적으로 수직인 제2 차원(예컨대 수평 방향)에 걸쳐 회전가능하다. 시스템(700)은 광 전송 어셈블리(302)와 광 감지기9104) 사이에서 기계적으로 및/또는 광학적으로 결합되는 슬립 링(slip ring)(704)을 포함한다. 한가지 형태에서, 공간적 프로파일의 추정을 용이하게 하는 시스템은 빛을 한 개 차원에 대하여 파장 채널을 제어하고 다른 차원에 대하여 회전가능한 지지대(702)의 각도 또는 회전을 조절함으로써 2개 차원들로 빛을 지향하도록 구성될 수 있다. 처리 유닛(105)은 파장 제어를 위한 광원(102) 및 각도 또는 회전 제어를 위한 회전가능한 지지대(702) 모두에 작동상 결합될 수 있다. 대안적인 배치에서(도시되지 않음), 빔 지향기(103)는 회전가능한 지지대의 회전축 주위로 공전하기 보다는 내부축을 주위로 회전할 수 있다. 예컨대, 빔 지향기(103)는 피그테일드 시준기와 같은 빔 확장 광학계(304) 주위로, 도 3에서 확장된 빔(306) 또는 도 4a~4g의 확장된 빔(406)의 방향으로 정렬되는 회전축을 따라 회전할 수 있다.
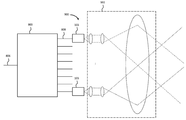
다른 배치에서, 2개 차원에 걸쳐 빛을 지향함으로써 공간적 프로파일의 추정을 용이하게 하는 시스템은 2개 차원에 걸쳐 빛의 지향을 제공하기 위한 광축(예컨대 확장 광학계의)으로부터 공간적으로 오프셋된 출력 포트들(인터리빙 포트들)을 구비한 광학 인터리버를 포함한다. 도 8은 입력 (복합) 포트와 N개의 출력 포트들(인터리빙 포트들) 중의 하나 사이에 빛을 포팅하기 위한 광학 인터리버(800)의 형태로 스펙트럼 콤브 필터(spectral comb filter)를 도시한 것인데, 여기서 N = 2x이고 x는 양의 정수이다. 도 8에서, N = 8이다. 다른 배치에서, N은 2이거나 16일 수 있다. 광학 인터리버(800)는 광학 경로 차이(806)를 가지는 2개의 간섭계 경로(interferometric path)에 의해 분리된 세그먼트(segment)의 각각의 단부에 스플리터(splitter)(804)를 각각 포함하는 다중 간섭계 세그먼트(예컨대 802)를 포함한다. 한 브랜치에서 각각의 세그먼트(802)는 다음 브랜치에서 2개의 세그먼트로 분할된다. 광학 경로 차이는 한 브랜치에서 다음 브랜치로 가면서 배가 된다(예컨대, ΔL, 2ΔL, 4ΔL ... 등). 복합 포트(806)는 다중 파장 채널들의 모든 N차 연속 파장 채널들(예컨대 λ1, λN+1, λ2N+1, ...) 중의 하나에서 빛을 수신하거나 제공하도록 구성된다. N개의 인터리빙 포트(808)는 N개 그룹들의 파장 채널들 중의 하나의 대응하는 빛을 각각 제공하거나 각각 수신하도록 구성된다. 도 9는 광학 인터리버(800), N개의 빔 지향기(103) 및 확장 광학계(902)를 포함하는 시스템(900)을 도시한다. 빔 지향기(103)는 확장 광학계(902)의 광축으로부터 제2 방향에 걸쳐 공간적으로 오프셋된 각각의 인터리빙 포트들로부터 빛을 수신한다. 빔 지향기(103) 각각은 제1 차원에 걸쳐 빛을 지향시키는 반면(예컨대 페이지 안으로 및 밖으로), 확장 광학계(902)는 지향된 빛을 빔 지향기(103)로부터 제2 차원에 걸쳐 더 지향되도록 각도지게 한다(예컨대 페이지 위로 및 아래로). 당업자라면, 광학 인터리버를 사용하는 대신 또는 그에 더하여, 패브리-페롯 공명기(Fabry-Perot resonator)나 마하-젠터 간섭계(Mach-Zehnder interferometer)와 같은, 다른 형태의 스펙트럼 콤브 필터가 사용될 수 있음을 인식할 것이다.
또다른 배치에서, 광학 인터리버(800)를 사용하는 대신, 하나의 반사 요소 또는 배열, 미소전자기계 시스템이나 MEMS와 같은 것이 2개 차원에 걸쳐 빛의 지향을 제공하는데 사용될 수 있다. 반사 요소들 중의 하나 또는 배열은 시준 및 확장을 위한 확장 광학계(902)를 향해 빛을 지향하도록 구성될 수 있다. 이 배치는 제2 차원에서, 광학 인터리버(800)의 경우에서와 같이 이산적인 각도들 보다는, 연속적인 각도들에 걸쳐 조절을 용이하게 한다.
본 발명의 배치가 설명되었으므로, 당업자에게는 설명된 배치들이 다음의 장점들 중의 적어도 하나를 가지고 있음이 명백할 것이다:
● 빛이 지향되는 범위나 각도의 숫자에 상관없이 빔 지향기의 개구 사이즈의 활용이 최대화된다.
● 1차원 빔 지향기가 다양한 상이한 기계적 또는 광학적 시스템에 추가되어 제2 차원에서 빔 지향을 제공할 수 있다.
본 명세서에 개시되고 정의된 발명은 문자 혹은 도면에서 언급되었거나 명백한 개별적 특징들의 두개 또는 그 이상의 모든 대안적 조합들로 확장됨을 이해하여야 한다. 이 모든 상이한 조합들은 본 발명의 다양한 대체적인 양태를 구성한다.
Claims (24)
- 환경의 공간적 프로파일(spatial profile)의 추정을 용이하게 하기 위한 시스템으로서, 상기 시스템은:
다중 파장 채널들 중에서 선택된 하나 또는 그 이상에서 빛을 제공하도록 구성된 광원으로서, 상기 광원의 빛은 적어도 하나의 시간-가변 특성(time-varying attribute)을 갖는, 광원(light source);
개구(aperture)를 구비하고,
상기 환경으로 상기 개구를 통해 출력광(outgoing light)을 공간적으로 지향시키고, 상기 환경에 의해 반사된 상기 출력광의 적어도 일부분을 수신하고, 상기 출력광은:
상기 개구의 제1 부분을 통과하여 복수의 방향들 중의 제1 방향으로 제1 차원을 따라 상기 환경으로 지향되고, 상기 제1 방향은 제1 선택된 파장 채널(first selected wavelength channel)에서의 상기 출력광에 대응하고; 그리고
상기 개구의 제2 부분을 통과하여 복수의 방향들 중의 제2 방향으로 상기 제1 차원을 따라 환경으로 지향되고, 상기 제2 방향은 제2 선택된 파장 채널(second selected wavelength channel)에서의 상기 출력광에 대응되고, 상기 제2 부분은 상기 제1 부분과 공간적으로 오버랩;되도록 구성된 빔 지향기(beam director);
반사광을 감지하도록 구성된 광 감지기(light detector); 및
상기 제1 방향 및 상기 제2 방향과 연관된 상기 환경의 상기 공간적 프로파일의 추정을 위한 상기 반사광의 상기 적어도 하나의 시간-가변 특성과 연관된 적어도 하나의 특징을 결정하도록 구성되는, 처리 유닛(processing unit);
을 포함하는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제1항에 있어서,
상기 제1 선택된 파장 채널에서의 상기 출력광은 상기 제2 선택된 파장 채널에서 상기 출력광과 실질적으로 동일한 빔 형상을 포함하는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제1항에 있어서,
상기 빔 지향기는 상기 개구의 제3 부분을 통과하여 상기 제1 선택된 파장 채널에서 상기 반사광을 수신하고, 상기 개구의 제4 부분을 통과하여 상기 제2 선택된 파장 채널에서 상기 반사광을 수신하도록 구성되고, 상기 개구의 상기 제3 부분은 상기 개구의 상기 제4 부분과 공간적으로 오버랩되는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제3항에 있어서,
상기 개구의 상기 제1 부분, 상기 제2 부분, 상기 제3 부분 및 상기 제4 부분은 서로 간에 공간적으로 오버랩되는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제1항에 있어서,
상기 개구의 상기 제1 부분 및 상기 제2 부분은 적어도 4mm의 빔 둘레 사이즈에 대응하는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제4항에 있어서,
상기 개구의 상기 제3 부분 및 상기 제4 부분은 적어도 4mm의 빔 둘레 사이즈에 대응하는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제1항에 있어서,
상기 출력광을 상기 광원으로부터 상기 빔 지향기로 전송하고 상기 반사광을 상기 빔 지향기로부터 상기 광 감지기로 전송하도록 구성되는 광 전송 어셈블리(light transport assembly)를 더 포함하고, 상기 광 전송 어셈블리는:
상기 제1 선택된 파장 채널 및 상기 제2 선택된 파장 채널에서 상기 출력광을 전달하기 위한 상기 광원과 상기 빔 지향기 사이의 아웃바운드 유도-광 경로(outbound guided-optic route); 및
상기 제1 선택된 파장 채널 및 상기 제2 선택된 파장 채널에서의 상기 반사광을 전달하기 위한 상기 빔 지향기와 상기 광 감지기 사이의 인바운드 유도-광 경로(inbound guided-optic route);를 포함하는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제7항에 있어서,
상기 인바운드 유도-광 경로 및 상기 아웃바운드 유도-광 경로는: 광섬유 경로(fibre-optic route) 및 광회로 경로(optical circuit route)의 그룹으로부터 각각 선택되는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제7항에 있어서,
상기 아웃바운드 유도-광 경로는 상기 인바운드 유도-광 경로 보다 작은 개구수(numerical aperture)와 연관되는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제7항에 있어서,
상기 아웃바운드 유도-광 경로는 상기 인바운드 유도-광 경로로부터 공간적으로 분리되는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제10항에 있어서,
상기 광 전송 어셈블리는 상기 아웃바운드 유도-광 경로에 단일-모드 섬유를 포함하고 상기 인바운드 유도-광 경로에 다중-모드 섬유를 포함하는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제7항에 있어서,
상기 아웃바운드 유도-광 경로는 상기 인바운드 유도-광 경로와 공간적으로 오버랩되는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제12항에 있어서,
상기 광 전송 어셈블리는 상기 공간적으로 오버랩된 아웃바운드 유도-광 경로 및 인바운드 유도-광 경로에 이중-클래드 섬유(double clad fibre)를 포함하고, 상기 이중-클래드 섬유는 상기 아웃바운드 유도-광 경로에 대한 제1 개구수 및 상기 인바운드 유도-광 경로에 대한, 상기 제1 개구수보다 큰, 제2 개구수와 연관되는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제1항에 있어서,
상기 빔 지향기는 하나 또는 그 이상의 회절 격자(diffraction grating)를 포함하는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제14항에 있어서,
상기 하나 또는 그 이상의 회절 격자들은, 상기 빛을 시계 방향 경로 또는 반시계 방향 경로로 돌리도록 배치된 3개의 회절 격자들을 포함하는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제14항 또는 제15항에 있어서,
상기 하나 또는 그 이상의 회절 격자들 중의 임의의 하나 또는 그 이상은 조절가능하게 틸팅가능하여 상기 제1 차원에 실질적으로 직교하는 제2 차원을 따라 빛을 지향시키는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제16항에 있어서,
상기 빔 지향기는 하나 또는 그 이상의 빔 보상기(beam compensator)를 포함하는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제17항에 있어서,
상기 하나 또는 그 이상의 빔 보상기 중의 적어도 하나는 상기 하나 또는 그 이상의 회절 격자들의 인접한 쌍들 사이에 위치되는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제1항에 있어서,
상기 빔 지향기는 회전가능하거나, 또는 회전가능한 굴절 요소 또는 회전가능한 반사 요소를 포함하여, 상기 제1 차원에 실질적으로 직교하는 제2 차원에 걸쳐 빛을 지향시키는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제19항에 있어서,
상기 광 전송 어셈블리는 상기 회전가능한 빔 지향기와 빛을 결합시키는 슬립 링 어셈블리(slip ring assembly)를 포함하는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제1항에 있어서,
상기 빔 지향기는 복합 포트(composite port)와 N개의 인터리빙 포트들(interleaving ports) 중의 하나 사이의 빛을 포팅하는 스펙트럼 콤브 필터(spectral comb filter)를 포함하고, 상기 복합 포트는 상기 다중 파장 채널들의 모든 N차 연속 파장 채널들(consecutive wavelength channels) 중의 임의의 하나에서 빛을 수신하거나 제공하도록 구성되고, 상기 N개의 인터리빙 포트들은 파장 채널들의 N개 그룹들 중의 하나에 대응하는 빛을 각각 제공하거나 각각 수신하도록 구성되는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제21항에 있어서,
상기 N개의 인터리빙 포트들은, 제2 차원에 걸쳐 대응하는 각 분리(angular separation)를 제공하기 위하여 광축으로부터 각각의 양만큼 각각 오프셋되는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 제22항에 있어서,
N은 2와 16을 포함하여 2와 16 사이의 임의의 정수인, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템. - 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템으로서, 상기 시스템은:
다중 파장 채널들 중에서 선택된 하나 또는 그 이상에서 빛을 제공하도록 구성된 광원으로서, 상기 광원의 빛은 적어도 하나의 시간-가변 특성을 갖는, 광원;
하나 또는 그 이상의 회절 격자들을 구비하고,
상기 하나 또는 그 이상의 회전 격자들을 통해 출력광을 공간적으로 지향시켜 상기 환경으로 보내고, 상기 환경에 의해 반사된 상기 출력광의 적어도 일부분을 수신하며, 상기 출력광은:
상기 하나 또는 그 이상의 회절 격자들을 통과하여 복수의 방향들 중의 제1 방향으로 제1 차원을 따라 상기 환경으로 지향되고, 상기 제1 방향은 제1 선택된 파장 채널에서의 상기 출력광에 대응하고; 그리고
상기 하나 또는 그 이상의 회절 격자들을 통과하여 복수의 방향들 중의 제2 방향으로 상기 제1 차원을 따라 환경으로 지향되고, 상기 제2 방향은 제2 선택된 파장 채널에서의 상기 출력광에 대응되고, 상기 하나 또는 그 이상의 회절 격자들 중의 임의의 하나 또는 그 이상은 조절가능하게 틸팅가능하여 상기 제1 차원에 실질적으로 직교하는 제2 차원을 따라 빛을 지향;시키도록 구성되는, 빔 지향기(beam director);
반사광을 감지하도록 구성된 광 감지기(light detector); 및
상기 제1 방향 및 상기 제2 방향과 연관된 상기 환경의 상기 공간적 프로파일의 추정을 위한 상기 반사광의 상기 적어도 하나의 시간-가변 특성과 연관된 적어도 하나의 특징을 결정하도록 구성되는, 처리 유닛(processing unit);
을 포함하는, 환경의 공간적 프로파일의 추정을 용이하게 하기 위한 시스템.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AU2016905228 | 2016-12-16 | ||
| AU2016905228A AU2016905228A0 (en) | 2016-12-16 | Estimation of spatial profile of environment | |
| PCT/AU2017/051395 WO2018107237A1 (en) | 2016-12-16 | 2017-12-15 | Estimation of spatial profile of environment |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20190092563A true KR20190092563A (ko) | 2019-08-07 |
Family
ID=62557667
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197020778A KR20190092563A (ko) | 2016-12-16 | 2017-12-15 | 환경의 공간적 프로파일의 추정 |
Country Status (8)
| Country | Link |
|---|---|
| US (3) | US11162789B2 (ko) |
| EP (1) | EP3555663A4 (ko) |
| JP (2) | JP7069447B2 (ko) |
| KR (1) | KR20190092563A (ko) |
| CN (1) | CN110226103B (ko) |
| AU (4) | AU2017377672C1 (ko) |
| CA (1) | CA3046812A1 (ko) |
| WO (1) | WO2018107237A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022178575A1 (en) * | 2021-02-24 | 2022-09-01 | Baraja Pty Ltd | An optical beam director |
Families Citing this family (54)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102380216B1 (ko) | 2016-11-29 | 2022-03-28 | 블랙모어 센서스 앤드 애널리틱스, 엘엘씨 | 포인트 클라우드 데이터 세트에서 객체의 분류를 위한 방법 및 시스템 |
| CN110140064B (zh) | 2016-11-30 | 2023-07-18 | 布莱克莫尔传感器和分析有限责任公司 | 利用光学测距系统进行自动实时自适应扫描的方法和系统 |
| WO2018160240A2 (en) | 2016-11-30 | 2018-09-07 | Blackmore Sensors and Analytics Inc. | Method and system for doppler detection and doppler correction of optical chirped range detection |
| KR102252219B1 (ko) | 2016-11-30 | 2021-05-13 | 블랙모어 센서스 앤드 애널리틱스, 엘엘씨 | 광학 거리 측정 시스템을 이용한 적응형 스캐닝 방법과 시스템 |
| EP3555663A4 (en) | 2016-12-16 | 2020-08-12 | Baraja Pty Ltd. | ESTIMATION OF THE SPATIAL PROFILE OF AN ENVIRONMENT |
| US10422880B2 (en) | 2017-02-03 | 2019-09-24 | Blackmore Sensors and Analytics Inc. | Method and system for doppler detection and doppler correction of optical phase-encoded range detection |
| US10401495B2 (en) | 2017-07-10 | 2019-09-03 | Blackmore Sensors and Analytics Inc. | Method and system for time separated quadrature detection of doppler effects in optical range measurements |
| WO2019017245A1 (ja) * | 2017-07-18 | 2019-01-24 | パイオニア株式会社 | 光学装置 |
| EP3657216A4 (en) * | 2017-07-18 | 2021-04-07 | Pioneer Corporation | OPTICAL DEVICE |
| US10534084B2 (en) | 2017-07-27 | 2020-01-14 | Blackmore Sensors & Analytics, Llc | Method and system for using square wave digital chirp signal for optical chirped range detection |
| KR20200081357A (ko) | 2017-08-25 | 2020-07-07 | 바라자 피티와이 엘티디 | 환경의 공간 프로파일의 추정 |
| KR20200084863A (ko) | 2017-09-06 | 2020-07-13 | 바라자 피티와이 엘티디 | 광학 빔 지향기 |
| US10003168B1 (en) | 2017-10-18 | 2018-06-19 | Luminar Technologies, Inc. | Fiber laser with free-space components |
| DE102017223658A1 (de) * | 2017-12-22 | 2019-06-27 | Robert Bosch Gmbh | LIDAR-Vorrichtung (100) zur Erfassung eines Objekts |
| KR102405872B1 (ko) | 2018-04-23 | 2022-06-03 | 블랙모어 센서스 앤드 애널리틱스, 엘엘씨 | 코히어런트 거리 도플러 광학 센서를 이용한 자율 주행 차량 제어 방법 및 시스템 |
| DE102018117792A1 (de) | 2018-07-24 | 2020-01-30 | Carl Zeiss Ag | Vorrichtung zur ortsaufgelösten Abstands- und/oder Geschwindigkeitsermittlung eines Objekts |
| WO2020028146A1 (en) | 2018-07-30 | 2020-02-06 | Blackmore Sensors And Analytics, Llc | Method and system for optimizing scanning of coherent lidar in autonomous vehicles |
| JP7216188B2 (ja) | 2018-08-10 | 2023-01-31 | ブラックモア センサーズ アンド アナリティクス エルエルシー | コリメートされたビームのファンを用いたコヒーレントlidarのスキャニングのための方法およびシステム |
| KR102363751B1 (ko) | 2018-09-05 | 2022-02-15 | 블랙모어 센서스 앤드 애널리틱스, 엘엘씨 | 코히런트 lidar의 피치-캐치 스캐닝을 위한 방법 및 시스템 |
| US11733361B2 (en) * | 2018-09-06 | 2023-08-22 | Aeva, Inc. | Polarization encoded beam delivery and collection |
| US11573297B2 (en) * | 2018-09-14 | 2023-02-07 | GM Global Technology Operations LLC | Lidar system with integrated circulator |
| US11493753B1 (en) * | 2018-09-26 | 2022-11-08 | Insight Lidar, Inc. | Multi-beam, wavelength-tuned laser scanning |
| KR102602366B1 (ko) | 2018-10-02 | 2023-11-15 | 블랙모어 센서스 앤드 애널리틱스, 엘엘씨 | 코히런트 lidar의 스캐닝을 최적화하기 위한 방법 및 시스템 |
| KR102391143B1 (ko) | 2018-11-13 | 2022-04-26 | 블랙모어 센서스 앤드 애널리틱스, 엘엘씨 | 위상 인코딩 lidar에서의 내부 반사 감산을 위한 레이저 위상 추적 방법 및 시스템 |
| DE102018129152A1 (de) | 2018-11-20 | 2020-05-20 | Carl Zeiss Ag | Vorrichtung zur zweidimensional scannenden Strahlablenkung eines Lichtstrahls |
| US10754012B2 (en) | 2019-01-04 | 2020-08-25 | Blackmore Sensors & Analytics, Llc | Lidar system including multifaceted deflector |
| EP3906424A1 (en) | 2019-01-04 | 2021-11-10 | Blackmore Sensors & Analytics, LLC | Method and system for refractive beam-steering |
| US11822010B2 (en) | 2019-01-04 | 2023-11-21 | Blackmore Sensors & Analytics, Llc | LIDAR system |
| CN113574407A (zh) * | 2019-01-25 | 2021-10-29 | 硅光芯片技术公司 | Lidar系统中输出信号的操纵 |
| DE102019101968A1 (de) * | 2019-01-28 | 2020-07-30 | Valeo Schalter Und Sensoren Gmbh | Sendeeinrichtung für eine optische Messvorrichtung zur Erfassung von Objekten, Lichtsignalumlenkeinrichtung, Messvorrichtung und Verfahren zum Betreiben einer Sendeeinrichtung |
| WO2020161260A1 (en) * | 2019-02-06 | 2020-08-13 | Rockley Photonics Limited | Optical components for scanning lidar |
| CN113167873B (zh) | 2019-02-08 | 2022-09-13 | 卢米诺有限责任公司 | 具有半导体光放大器的激光雷达系统 |
| US11079546B2 (en) | 2019-04-22 | 2021-08-03 | Blackmore Sensors & Analytics, LLC. | Providing spatial displacement of transmit and receive modes in LIDAR system |
| US11181640B2 (en) | 2019-06-21 | 2021-11-23 | Blackmore Sensors & Analytics, Llc | Method and system for vehicle odometry using coherent range doppler optical sensors |
| EP3999877A2 (en) | 2019-07-15 | 2022-05-25 | Blackmore Sensors & Analytics, LLC | System for sidelobe suppression in phase encoded doppler lidar |
| US10838061B1 (en) | 2019-07-16 | 2020-11-17 | Blackmore Sensors & Analytics, LLC. | Method and system for enhanced velocity resolution and signal to noise ratio in optical phase-encoded range detection |
| US11579305B2 (en) * | 2019-11-05 | 2023-02-14 | Silc Technologies, Inc. | LIDAR output steering systems having optical gratings |
| DE102019135759B4 (de) * | 2019-12-23 | 2024-01-18 | Carl Zeiss Ag | LIDAR-System zur scannenden Abstandsermittlung eines Objekts |
| US11531113B1 (en) | 2020-02-25 | 2022-12-20 | Aurora Operations, Inc. | System and methods for object detection and tracking using a lidar observation model |
| US11209529B2 (en) | 2020-03-05 | 2021-12-28 | Aurora Operations, Inc. | Coherent signal combining with multiple-outputs for quasi-CW LIDAR operation |
| US10942277B1 (en) | 2020-06-19 | 2021-03-09 | Aurora Innovation, Inc. | LIDAR system |
| US11125618B1 (en) * | 2020-06-26 | 2021-09-21 | Scidatek Inc. | Photonic integrated spectrometer with tunable dispersive element and method of using same |
| US11415699B2 (en) | 2020-06-29 | 2022-08-16 | Aurora Operations, Inc. | Lidar transmit/receive system |
| US11016197B1 (en) | 2020-06-29 | 2021-05-25 | Aurora Innovation, Inc. | LIDAR system |
| US10948600B1 (en) | 2020-06-29 | 2021-03-16 | Aurora Innovation, Inc. | Systems and methods for IQ detection |
| US11280909B2 (en) | 2020-06-29 | 2022-03-22 | Aurora Operations, Inc. | Lidar transmit/receive system |
| US11029395B1 (en) * | 2020-06-30 | 2021-06-08 | Aurora Innovation, Inc. | Systems and methods for pulsed-wave LIDAR |
| US10960900B1 (en) | 2020-06-30 | 2021-03-30 | Aurora Innovation, Inc. | Systems and methods for autonomous vehicle control using depolarization ratio of return signal |
| US11477350B2 (en) * | 2021-01-15 | 2022-10-18 | Raytheon Company | Active imaging using a micro-electro-mechanical system (MEMS) micro-mirror array (MMA) |
| US11550146B2 (en) | 2021-01-19 | 2023-01-10 | Raytheon Company | Small angle optical beam steering using micro-electro-mechanical system (MEMS) micro-mirror arrays (MMAS) |
| CN113048960B (zh) * | 2021-04-13 | 2024-04-12 | 广州得尔塔影像技术有限公司 | 一种空间位置检测装置及位置调整方法 |
| WO2023044538A1 (en) * | 2021-09-24 | 2023-03-30 | Baraja Pty Ltd | An optical beam director |
| WO2023141672A1 (en) * | 2022-01-28 | 2023-08-03 | Baraja Pty Ltd | Spatial profiling systems and method |
| WO2024033666A1 (en) * | 2022-08-12 | 2024-02-15 | University Of Zagreb, Faculty Of Science | Method for tuning the laser frequency implemented in a rotating device with an optical waveguide |
Family Cites Families (77)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3953667A (en) | 1974-06-28 | 1976-04-27 | Martin Marietta Corporation | Passive and/or active imaging system |
| US4830486A (en) | 1984-03-16 | 1989-05-16 | Goodwin Frank E | Frequency modulated lasar radar |
| JP2664187B2 (ja) * | 1988-03-14 | 1997-10-15 | 日本電信電話株式会社 | 光パレス圧縮装置 |
| DE4427352C1 (de) | 1994-08-02 | 1996-01-18 | Siemens Ag | Verfahren zur hochauflösenden Abstandsmessung mittels FMCW-Laser-Radar |
| US6147760A (en) | 1994-08-30 | 2000-11-14 | Geng; Zheng Jason | High speed three dimensional imaging method |
| JPH08285942A (ja) | 1995-04-11 | 1996-11-01 | Yazaki Corp | 車両用レーザレーダ |
| US5583683A (en) | 1995-06-15 | 1996-12-10 | Optical Corporation Of America | Optical multiplexing device |
| US5686722A (en) | 1996-02-28 | 1997-11-11 | Her Majesty The Queen In Right Of Canada, As Represented By The Minister Of National Defence Of Her Majesty's Canadian Government | Selective wavelength identification friend or foe (SWIFF) |
| DE19622777A1 (de) | 1996-06-07 | 1997-12-11 | Bosch Gmbh Robert | Sensorsystem zur automatischen relativen Positionskontrolle |
| JPH10170637A (ja) * | 1996-12-16 | 1998-06-26 | Omron Corp | 光走査装置 |
| US6278538B1 (en) | 1997-05-16 | 2001-08-21 | U.S. Philips Corporation | Optical scanner |
| US5877851A (en) | 1997-09-24 | 1999-03-02 | The United States Of America As Represented By The Secretary Of The Army | Scannerless ladar architecture employing focal plane detector arrays and FM-CW ranging theory |
| US6031658A (en) | 1998-09-25 | 2000-02-29 | University Of Central Florida | Digital control polarization based optical scanner |
| US6377720B1 (en) | 1999-02-24 | 2002-04-23 | Micro-Optics, Inc. | Inline optical circulators |
| US6859275B2 (en) | 1999-04-09 | 2005-02-22 | Plain Sight Systems, Inc. | System and method for encoded spatio-spectral information processing |
| US6263127B1 (en) | 1999-05-13 | 2001-07-17 | Lucent Technologies Inc. | Free-space/arrayed-waveguide router |
| US6263131B1 (en) | 1999-07-02 | 2001-07-17 | Nortel Networks (Photonics) Pty Ltd. | Reflective non-reciprocal optical device |
| US6339661B1 (en) | 1999-10-20 | 2002-01-15 | Micro-Optics, Inc. | Polarization maintaining fiber optic circulators |
| US6687036B2 (en) | 2000-11-03 | 2004-02-03 | Nuonics, Inc. | Multiplexed optical scanner technology |
| JP2002268013A (ja) | 2001-03-09 | 2002-09-18 | Furukawa Electric Co Ltd:The | 光サーキュレータ |
| WO2003009032A1 (en) | 2001-07-20 | 2003-01-30 | Essex Corporation | Method and apparatus for optical signal processing using an optical tapped delay line |
| US7489865B2 (en) | 2002-02-01 | 2009-02-10 | Cubic Corporation | Integrated optical communication and range finding system and applications thereof |
| US6792028B2 (en) | 2002-03-22 | 2004-09-14 | Raytheon Company | Method and laser beam directing system with rotatable diffraction gratings |
| US20040086214A1 (en) | 2002-07-10 | 2004-05-06 | Finisar Corporation | Optical circulator for bi-directional communication |
| US7078672B2 (en) * | 2004-01-16 | 2006-07-18 | Tong Xie | Method and system for optically tracking a target using interferometric technique |
| US7813644B2 (en) | 2004-05-10 | 2010-10-12 | Raytheon Company | Optical device with a steerable light path |
| GB2415560A (en) | 2004-06-25 | 2005-12-28 | Instro Prec Ltd | Vehicle safety system having a combined range finding means and a communication means |
| US7532311B2 (en) | 2005-04-06 | 2009-05-12 | Lockheed Martin Coherent Technologies, Inc. | Efficient lidar with flexible target interrogation pattern |
| EP1929354B1 (en) | 2005-09-27 | 2017-07-26 | Bishop, Mark, Vincent | Energy signal processing system |
| US7831298B1 (en) * | 2005-10-04 | 2010-11-09 | Tomophase Corporation | Mapping physiological functions of tissues in lungs and other organs |
| US7787134B2 (en) * | 2005-11-09 | 2010-08-31 | The Boeing Company | Multiple fanned laser beam metrology system |
| WO2007071413A1 (en) * | 2005-12-23 | 2007-06-28 | Carl Zeiss Laser Optics Gmbh | Optical system and method for shaping a profile of a laser beam |
| EP1813964B1 (en) * | 2006-01-29 | 2010-09-15 | Rafael-Armament Development Authority Ltd. | LADAR with passive fibre-optical scanner |
| US7768708B1 (en) * | 2006-02-03 | 2010-08-03 | Raytheon Company | Light source having spatially interleaved light beams |
| US7544945B2 (en) * | 2006-02-06 | 2009-06-09 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Vertical cavity surface emitting laser (VCSEL) array laser scanner |
| EP2041515A4 (en) * | 2006-07-13 | 2009-11-11 | Velodyne Acoustics Inc | HIGH DEFINITION LIDAR SYSTEM |
| KR100890303B1 (ko) | 2006-08-10 | 2009-03-26 | 삼성전기주식회사 | 왜곡 보정 기능이 구비된 회절형 광변조기 디스플레이 장치 |
| US7570347B2 (en) | 2007-06-26 | 2009-08-04 | The United States Of America As Represented By The Secretary Of The Army | Chirped amplitude modulation ladar |
| ES2539119T3 (es) | 2007-10-09 | 2015-06-26 | Windar Photonics A/S | Sistema LIDAR coherente basado en láser y amplificador semiconductor |
| JP5417723B2 (ja) | 2008-03-18 | 2014-02-19 | 株式会社豊田中央研究所 | 方位測定方法及び方位測定装置 |
| KR20090105747A (ko) | 2008-04-03 | 2009-10-07 | 삼성전자주식회사 | 광주사장치 및 이를 채용한 화상형성장치 |
| US7986397B1 (en) | 2008-04-30 | 2011-07-26 | Lockheed Martin Coherent Technologies, Inc. | FMCW 3-D LADAR imaging systems and methods with reduced Doppler sensitivity |
| JP5366476B2 (ja) | 2008-08-21 | 2013-12-11 | 大日本スクリーン製造株式会社 | 視覚装置 |
| US8440952B2 (en) | 2008-11-18 | 2013-05-14 | The Regents Of The University Of California | Methods for optical amplified imaging using a two-dimensional spectral brush |
| JP5257053B2 (ja) * | 2008-12-24 | 2013-08-07 | 株式会社豊田中央研究所 | 光走査装置及びレーザレーダ装置 |
| US9551575B2 (en) | 2009-03-25 | 2017-01-24 | Faro Technologies, Inc. | Laser scanner having a multi-color light source and real-time color receiver |
| EP2483698B1 (en) | 2009-09-28 | 2015-07-08 | Pentalum Technologies Ltd. | Methods, devices and systems for remote wind sensing |
| JP5408539B2 (ja) * | 2009-10-13 | 2014-02-05 | 株式会社リコー | センシング装置 |
| US8159680B2 (en) | 2010-02-16 | 2012-04-17 | Massachusetts Institute Of Technology | Single-transducer, three-dimensional laser imaging system and method |
| US9442015B2 (en) * | 2010-09-03 | 2016-09-13 | The Arizona Board Of Regents On Behalf Of The University Of Arizona | Snapshot spatial heterodyne imaging polarimetry |
| DE102010053726B4 (de) * | 2010-11-30 | 2012-11-29 | Technische Universität Dresden | Vorrichtung zur nicht-inkrementellen Positions- und Formvermessung bewegter Festkörper |
| US8599381B2 (en) * | 2011-01-19 | 2013-12-03 | Massachusetts Institute Of Technology | Gas detector for atmospheric species detection |
| US8659748B2 (en) * | 2011-02-15 | 2014-02-25 | Optical Air Data Systems, Llc | Scanning non-scanning LIDAR |
| WO2013107853A1 (en) | 2012-01-20 | 2013-07-25 | Technische Universiteit Eindhoven | Two-dimensional optical beam steering module |
| US9851443B2 (en) | 2012-03-16 | 2017-12-26 | Alcatel Lucent | Optical beam sweeper |
| KR102038533B1 (ko) | 2012-06-14 | 2019-10-31 | 한국전자통신연구원 | 레이저 레이더 시스템 및 목표물 영상 획득 방법 |
| SG11201506986XA (en) | 2013-03-05 | 2015-10-29 | Shilat Optronics Ltd | Free space optical communication system |
| DE102013215627A1 (de) | 2013-08-08 | 2015-02-12 | Robert Bosch Gmbh | Lichtdetektionsvorrichtung und Steuerverfahren |
| US9490895B2 (en) | 2013-09-20 | 2016-11-08 | Finisar Corporation | Ultrafast high resolution optical channel monitor |
| EP2866051B1 (en) | 2013-10-23 | 2018-10-03 | Ladar Limited | A laser detection and ranging device for detecting an object under a water surface |
| WO2015087564A1 (ja) | 2013-12-10 | 2015-06-18 | 三菱電機株式会社 | レーザレーダ装置 |
| US20150192677A1 (en) | 2014-01-03 | 2015-07-09 | Quanergy Systems, Inc. | Distributed lidar sensing system for wide field of view three dimensional mapping and method of using same |
| ES2792871T3 (es) | 2014-12-19 | 2020-11-12 | Windar Photonics As | LIDAR basado en SMEM |
| US10114112B2 (en) | 2015-03-26 | 2018-10-30 | Qualcomm Incorporated | Communicating service information from one light detection and ranging (LIDAR) system to another LIDAR system |
| US10281581B2 (en) | 2015-05-07 | 2019-05-07 | GM Global Technology Operations LLC | Lidar with optical communication |
| US9577327B2 (en) | 2015-07-20 | 2017-02-21 | Elwha Llc | Electromagnetic beam steering antenna |
| JP6894082B2 (ja) | 2015-09-28 | 2021-06-23 | バラジャ ピーティーワイ リミテッドBaraja Pty Ltd | 空間プロファイリングシステムおよび方法 |
| CN105487082B (zh) * | 2015-11-19 | 2018-04-10 | 中国空间技术研究院 | 一种用于远距离目标探测的激光雷达 |
| JP6852085B2 (ja) * | 2015-11-30 | 2021-03-31 | ルミナー テクノロジーズ インコーポレイテッド | 分布型レーザー及び複数のセンサー・ヘッドを備える光検出及び測距システム、並びに、光検出及び測距システムのパルス・レーザー |
| CN105549029B (zh) * | 2016-01-19 | 2018-11-27 | 中国工程物理研究院流体物理研究所 | 一种照明扫描叠加成像系统及方法 |
| WO2017176901A1 (en) | 2016-04-07 | 2017-10-12 | Arizona Board Of Regents On Behalf Of The University Of Arizona | Diffraction-based light beam scanner |
| CN110168430B (zh) | 2016-11-16 | 2022-08-23 | 博莱佳私人有限公司 | 光束定向器 |
| EP3555663A4 (en) | 2016-12-16 | 2020-08-12 | Baraja Pty Ltd. | ESTIMATION OF THE SPATIAL PROFILE OF AN ENVIRONMENT |
| KR20200081357A (ko) | 2017-08-25 | 2020-07-07 | 바라자 피티와이 엘티디 | 환경의 공간 프로파일의 추정 |
| KR20200084863A (ko) | 2017-09-06 | 2020-07-13 | 바라자 피티와이 엘티디 | 광학 빔 지향기 |
| CN112437886A (zh) | 2018-06-07 | 2021-03-02 | 博莱佳私人有限公司 | 光束定向器 |
| US11420701B2 (en) | 2019-01-31 | 2022-08-23 | Bombardier Recreational Products Inc. | Mirror assembly for a handlebar of a vehicle |
-
2017
- 2017-12-15 EP EP17880429.0A patent/EP3555663A4/en active Pending
- 2017-12-15 CN CN201780084931.6A patent/CN110226103B/zh active Active
- 2017-12-15 CA CA3046812A patent/CA3046812A1/en active Pending
- 2017-12-15 AU AU2017377672A patent/AU2017377672C1/en active Active
- 2017-12-15 US US16/467,319 patent/US11162789B2/en active Active
- 2017-12-15 WO PCT/AU2017/051395 patent/WO2018107237A1/en unknown
- 2017-12-15 KR KR1020197020778A patent/KR20190092563A/ko not_active Application Discontinuation
- 2017-12-15 JP JP2019530217A patent/JP7069447B2/ja active Active
-
2021
- 2021-05-04 AU AU2021202811A patent/AU2021202811B2/en active Active
- 2021-08-25 US US17/412,149 patent/US11397082B2/en active Active
- 2021-12-16 AU AU2021286351A patent/AU2021286351B2/en active Active
-
2022
- 2022-03-10 US US17/691,489 patent/US11561093B2/en active Active
- 2022-03-31 JP JP2022058061A patent/JP2022088589A/ja active Pending
- 2022-05-13 AU AU2022203217A patent/AU2022203217B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022178575A1 (en) * | 2021-02-24 | 2022-09-01 | Baraja Pty Ltd | An optical beam director |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2021286351B2 (en) | 2022-02-24 |
| JP2020502503A (ja) | 2020-01-23 |
| US11397082B2 (en) | 2022-07-26 |
| CN110226103A (zh) | 2019-09-10 |
| US20220244048A1 (en) | 2022-08-04 |
| CN110226103B (zh) | 2023-08-01 |
| CA3046812A1 (en) | 2018-06-21 |
| AU2021202811B2 (en) | 2021-09-16 |
| AU2017377672A1 (en) | 2019-06-20 |
| AU2022203217B2 (en) | 2022-07-07 |
| AU2021202811A1 (en) | 2021-05-27 |
| US20210381829A1 (en) | 2021-12-09 |
| EP3555663A1 (en) | 2019-10-23 |
| US20190310377A1 (en) | 2019-10-10 |
| WO2018107237A1 (en) | 2018-06-21 |
| US11561093B2 (en) | 2023-01-24 |
| EP3555663A4 (en) | 2020-08-12 |
| AU2017377672B2 (en) | 2021-03-04 |
| JP2022088589A (ja) | 2022-06-14 |
| AU2017377672C1 (en) | 2021-11-11 |
| AU2021286351A1 (en) | 2022-01-20 |
| US11162789B2 (en) | 2021-11-02 |
| JP7069447B2 (ja) | 2022-05-18 |
| AU2022203217A1 (en) | 2022-06-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20190092563A (ko) | 환경의 공간적 프로파일의 추정 | |
| KR101546024B1 (ko) | 파장 동조 소스용 방법 및 장치 | |
| WO2020196689A1 (ja) | 光測定用光源装置、分光測定装置及び分光測定方法 | |
| WO2001006280A1 (en) | Method of writing grating structures | |
| CN105333816A (zh) | 一种基于光谱色散全场的超横向分辨率表面三维在线干涉测量系统 | |
| JP2657018B2 (ja) | 光コネクタ反射減衰量測定装置 | |
| CN109000691A (zh) | 一种三波光纤激光自混合干涉测量方法 | |
| CN109000690A (zh) | 一种双波光纤激光自混合干涉测量系统 | |
| US20220368098A1 (en) | Dual spectral variable-based optical frequency scanning laser light source and measurement device using the same and object angle-dependent distance measurement device using propagation angle switching for each optical frequency | |
| Sun et al. | External cavity length dependence of multiple self-mixing interference sensing applications based on finite apertures of laser front faces | |
| EP3771883A2 (en) | Dispersive optical device | |
| AU5664100A (en) | Grating structure and optical devices |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |