KR20140057078A - 리졸버 및 그 제조 방법 - Google Patents
리졸버 및 그 제조 방법 Download PDFInfo
- Publication number
- KR20140057078A KR20140057078A KR1020120123742A KR20120123742A KR20140057078A KR 20140057078 A KR20140057078 A KR 20140057078A KR 1020120123742 A KR1020120123742 A KR 1020120123742A KR 20120123742 A KR20120123742 A KR 20120123742A KR 20140057078 A KR20140057078 A KR 20140057078A
- Authority
- KR
- South Korea
- Prior art keywords
- rotor
- core
- output signal
- coil
- protrusions
- Prior art date
Links
Images
















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F41/00—Apparatus or processes specially adapted for manufacturing or assembling magnets, inductances or transformers; Apparatus or processes specially adapted for manufacturing materials characterised by their magnetic properties
- H01F41/02—Apparatus or processes specially adapted for manufacturing or assembling magnets, inductances or transformers; Apparatus or processes specially adapted for manufacturing materials characterised by their magnetic properties for manufacturing cores, coils, or magnets
- H01F41/04—Apparatus or processes specially adapted for manufacturing or assembling magnets, inductances or transformers; Apparatus or processes specially adapted for manufacturing materials characterised by their magnetic properties for manufacturing cores, coils, or magnets for manufacturing coils
- H01F41/06—Coil winding
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/204—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils
- G01D5/2046—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils by a movable ferromagnetic element, e.g. a core
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/204—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils
- G01D5/2066—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils by movement of a single coil with respect to a single other coil
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/204—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils
- G01D5/2086—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils by movement of two or more coils with respect to two or more other coils
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/22—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature differentially influencing two coils
- G01D5/2291—Linear or rotary variable differential transformers (LVDTs/RVDTs) having a single primary coil and two secondary coils
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/245—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains using a variable number of pulses in a train
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K24/00—Machines adapted for the instantaneous transmission or reception of the angular displacement of rotating parts, e.g. synchro, selsyn
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D3/00—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups
- G01D3/028—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups mitigating undesired influences, e.g. temperature, pressure
- G01D3/036—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups mitigating undesired influences, e.g. temperature, pressure on measuring arrangements themselves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/2006—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the self-induction of one or more coils
- G01D5/2013—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the self-induction of one or more coils by a movable ferromagnetic element, e.g. a core
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
전동기의 회전 각도를 검출하기 위하여 회전자와 고정자를 구비한 리졸버(resolver)가 개시된다. 회전자의 주위에 설치된 고정자는 코어, 신호원 코일, 및 복수의 출력 신호 코일들을 포함한다. 복수의 출력 신호 코일들은, 코어의 서로 다른 돌출부들에 순서대로 번갈아가면서 감기어짐에 의하여, 신호원 코일로부터의 교류 자계와 회전자의 회전에 따라 서로 다른 위상의 유기 전압 신호들을 발생시킨다.
Description
본 발명은, 리졸버(resolver) 및 그 제조 방법에 관한 것으로서, 보다 상세하게는, 전동기의 회전 각도를 검출하기 위하여 회전자와 고정자를 구비한 리졸버 및 그 제조 방법에 관한 것이다.
리졸버 예를 들어, 가변 자기저항 리졸버(Variable Reluctance Resolver)는 전동기의 회전 각도를 검출하기 위하여 회전자와 고정자를 구비한다.
리졸버의 회전자는 전동기의 회전자 축과 연결되어 전동기의 회전자와 함께 회전한다.
회전자의 주위에 설치되는 고정자는 코어(core), 신호원 코일, 및 복수의 출력 신호 코일들을 포함한다
코어에는 회전자의 회전 방향을 따라 일정한 간격으로 돌출부들이 형성된다.
신호원 코일은, 코어의 돌출부들에 감겨져서, 입력 전압 신호가 인가됨에 따라 교류 자계를 발생시킨다.
복수의 출력 신호 코일들은, 신호원 코일과 함께 코어의 돌출부들에 감겨짐에 의하여, 신호원 코일로부터의 교류 자계와 회전자의 회전에 따라 서로 다른 위상의 유기 전압 신호들을 발생시킨다. 유기 전압 신호들에서는 가변적인 정극성 전압과 부극성 전압이 교호한다.
여기에서, 단일 출력 신호 코일을 사용하지 않고 복수의 출력 신호 코일들에 의하여 서로 다른 위상의 유기 전압 신호들을 사용함에 따라, 전동기의 회전 각도가 즉각적으로 구해질 수 있다.
상기와 같은 리졸버에 있어서, 종래에는, 고정자의 코어의 돌출부들 각각에 복수의 출력 신호 코일들이 함께 감기어진다. 이에 따라, 서로 다른 위상의 유기 전압 신호들을 얻기 위하여, 출력 신호 코일들 각각은 각 돌출부에 서로 다른 횟수로서 감기어져야만 한다. 따라서, 코어의 각 돌출부에 대한 총 감김 횟수도 서로 다르게 된다.
상기와 같은 종래의 리졸버에 의하면 다음과 같은 문제점들이 있다.
첫째, 리졸버의 제조 시에 출력 신호 코일들의 감김 횟수의 오류가 자주 발생한다.
둘째, 총 감김 횟수가 가장 많은 돌출부를 기준으로 고정자의 코어가 설계되어야 하므로, 효율적인 고정자의 구조가 설계될 수 없다.
본 발명의 실시예는, 제조 오류가 줄어들 수 있고, 설계 최적화가 용이해질 수 있는 리졸버 및 그 제조 방법을 제공하고자 한다.
본 발명의 일 측면에 의하면, 전동기의 회전 각도를 검출하기 위하여 회전자와 고정자를 구비한 리졸버(resolver)의 제조 방법에 있어서, 상기 회전자의 주위에 설치된 상기 고정자는 코어, 신호원 코일, 및 복수의 출력 신호 코일들을 포함한다.
상기 코어에는 상기 회전자의 회전 방향을 따라 일정한 간격으로 돌출부들이 형성된다.
상기 신호원 코일은, 입력 전압 신호가 인가됨에 따라 교류 자계를 발생시키도록 상기 코어의 상기 돌출부들에 감기진다.
상기 복수의 출력 신호 코일들은, 상기 신호원 코일로부터의 교류 자계와 상기 회전자의 회전에 따라 서로 다른 위상의 유기 전압 신호들을 발생시키도록, 상기 코어의 서로 다른 돌출부들에 순서대로 번갈아가면서 감기어진다.
바람직하게는, 상기 회전자는 상기 전동기의 회전자 축과 연결되도록 형성된다.
바람직하게는, 상기 회전자의 회전 방향으로의 외주면에는 반복적인 굴곡이 형성된다.
바람직하게는, 상기 회전자는, 상기 외주면의 반복적인 굴곡에 따라, 상기 코어의 상기 돌출부들을 향하여 복수 개의 돌출 극들을 갖는다.
바람직하게는, 상기 코어의 상기 돌출부들의 개수(Z)는, 상기 출력 신호 코일들의 개수(m)와 상기 회전자의 상기 돌출 극들의 개수(X)를 곱한 결과에 비례한다.
바람직하게는, 상기 복수의 출력 신호 코일들 중에서 어느 한 출력 신호 코일이 상기 코어의 어느 한 돌출부에 감기는 횟수 Nip는, 어느 한 출력 신호 코일의 총 감김 횟수를 Nt라 하면, Nip = 2 Nt / Z 의 수학식에 의하여 구해진다.
본 발명의 다른 측면에 의하면, 전동기의 회전 각도를 검출하기 위하여 회전자와 고정자를 구비한 리졸버(resolver)에 있어서, 상기 회전자의 주위에 설치된 상기 고정자는 코어, 신호원 코일, 제1 출력 신호 코일, 및 제2 출력 신호 코일을 포함한다.
상기 코어에는 상기 회전자의 회전 방향을 따라 일정한 간격으로 돌출부들이 형성된다.
상기 신호원 코일은, 상기 코어의 상기 돌출부들에 감겨서, 입력 전압 신호가 인가됨에 따라 교류 자계를 발생시킨다.
상기 제1 출력 신호 코일은 상기 코어의 상기 돌출부들 중에서 홀수번째 돌출부들에 감기어진다.
상기 제2 출력 신호 코일은 상기 코어의 상기 돌출부들 중에서 짝수번째 돌출부들에 감기어진다.
바람직하게는, 상기 회전자는 상기 전동기의 회전자 축과 연결되어 상기 전동기의 회전자와 함께 회전한다.
바람직하게는, 상기 회전자의 회전 방향으로의 외주면에는 반복적인 굴곡이 형성되어 있다.
바람직하게는, 상기 회전자는, 상기 외주면의 반복적인 굴곡에 따라, 상기 코어의 상기 돌출부들을 향하여 복수 개의 돌출 극들을 갖는다.
바람직하게는, 상기 제1 출력 신호 코일은 상기 신호원 코일로부터의 교류 자계와 상기 회전자의 회전에 따라 제1 유기 전압 신호를 발생시킨다. 상기 제2 출력 신호 코일은 상기 신호원 코일로부터의 교류 자계와 상기 회전자의 회전에 따라 제2 유기 전압 신호를 발생시킨다. 상기 제1 출력 신호 코일과 상기 제2 출력 신호 코일이 상기 코어의 서로 다른 위치의 돌출부들에 교호하게 감기어짐에 따라, 상기 제1 유기 전압 신호와 상기 제2 유기 전압 신호 사이에 90o의 위상 차이가 발생된다.
바람직하게는, 상기 신호원 코일은 상기 코어의 각 돌출부에 동일한 횟수로서 감기어져 있다. 상기 제1 출력 신호 코일은 상기 코어의 상기 각 홀수번째 돌출부에 동일한 횟수로서 감기어져 있다. 상기 제2 출력 신호 코일은 상기 코어의 상기 각 짝수번째 돌출부에 동일한 횟수로서 감기어져 있다. 그래서 상기 코어의 각 돌출부에 대하여 동일한 총 감김 횟수가 적용된다.
본 발명의 실시예의 리졸버 및 그 제조 방법에 의하면, 상기 복수의 출력 신호 코일들은, 상기 코어의 서로 다른 돌출부들에 순서대로 번갈아가면서 감기어진다.
이에 따라, 상기 복수의 출력 신호 코일들 각각은, 상기 각 돌출부에 동일한 횟수로서 감기어지더라도, 상기 회전자의 회전에 따라 서로 다른 위상의 유기 전압 신호들을 취득할 수 있다. 그래서 상기 코어의 각 돌출부에 대하여 총 감김 횟수도 동일하게 적용될 수 있다.
요약하면, 본 발명의 실시예에 의하면, 상기 복수의 출력 신호 코일들 각각이 상기 각 돌출부에 동일한 횟수로서 감기어질 수 있고, 이에 따라 상기 코어의 각 돌출부에 대하여 총 감김 횟수도 동일하게 적용될 수 있다.
따라서, 본 발명의 실시예의 리졸버 및 그 제조 방법에 의하면 다음과 같은 효과들이 발생된다.
첫째, 리졸버의 제조 시에 출력 신호 코일들의 감김 횟수의 오류가 해소될 수 있다.
둘째, 상기 돌출부들 각각의 총 감김 횟수가 동일한 조건에서 고정자의 코어가 설계될 수 있으므로, 효율적인 고정자의 구조가 설계될 수 있다.
도 1은 본 발명의 일 실시예의 제조 방법에 의한 리졸버의 외형을 보여주는 사시도이다.
도 2는 도 1의 리졸버에서의 회전자의 외형을 보여주는 사시도이다.
도 3은 도 1의 리졸버의 구성 및 동작을 설명하기 위한 도면이다.
도 4는 도 1의 리졸버의 출력 신호들이 변환되어 사용됨을 설명하기 위한 도면이다.
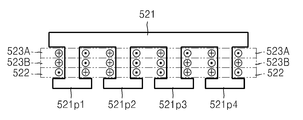
도 5는 종래의 리졸버의 제조 방법에서 고정자의 코어에 코일들이 감겨지는 방법을 설명하기 위한 도면이다.
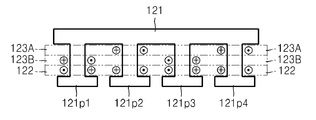
도 6은 도 1의 실시예의 리졸버의 제조 방법에서 고정자의 코어에 코일들이 감겨지는 방법을 설명하기 위한 도면이다.
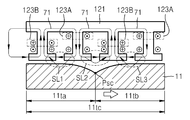
도 7은, 도 1의 실시예의 리졸버에서, 회전자의 위치에 따라 고정자의 각 슬롯에서 자속의 변화량이 달라짐을 설명하기 위한 도면이다.
도 8a 내지 8f는 도 1의 리졸버의 회전자가 0o에서 45o까지 회전하는 상태를 보여주는 도면이다.
도 9는 도 1의 리졸버의 회전자가 0o에서 45o까지 회전하는 과정에서 출력 신호 코일들에 발생되는 유기 전압 신호들을 함께 보여주는 파형도이다.
도 10은 리졸버 동작의 시뮬레이션을 위하여 신호원 코일에 입력될 전압 신호의 파형을 보여주는 도면이다.
도 11은, 도 10의 입력 전압 신호가 종래의 리졸버의 신호원 코일에 입력됨에 의하여, 출력 신호 코일들에 발생되는 유기 전압 신호들을 함께 보여주는 파형도이다.
도 12는, 도 10의 입력 전압 신호가 본 실시예의 리졸버의 신호원 코일에 입력됨에 의하여, 출력 신호 코일들에 발생되는 유기 전압 신호들을 함께 보여주는 파형도이다.
도 13은 본 실시예의 리졸버의 신호원 코일에 입력될 전압 신호를 파형 측정기에 의하여 측정한 결과를 보여주는 도면이다.
도 14는, 도 13의 입력 전압 신호가 본 실시예의 리졸버의 신호원 코일에 입력된 후, 출력 신호 코일들에 발생되는 유기 전압 신호들을 파형 측정기에 의하여 측정한 결과를 보여주는 도면이다.
도 2는 도 1의 리졸버에서의 회전자의 외형을 보여주는 사시도이다.
도 3은 도 1의 리졸버의 구성 및 동작을 설명하기 위한 도면이다.
도 4는 도 1의 리졸버의 출력 신호들이 변환되어 사용됨을 설명하기 위한 도면이다.
도 5는 종래의 리졸버의 제조 방법에서 고정자의 코어에 코일들이 감겨지는 방법을 설명하기 위한 도면이다.
도 6은 도 1의 실시예의 리졸버의 제조 방법에서 고정자의 코어에 코일들이 감겨지는 방법을 설명하기 위한 도면이다.
도 7은, 도 1의 실시예의 리졸버에서, 회전자의 위치에 따라 고정자의 각 슬롯에서 자속의 변화량이 달라짐을 설명하기 위한 도면이다.
도 8a 내지 8f는 도 1의 리졸버의 회전자가 0o에서 45o까지 회전하는 상태를 보여주는 도면이다.
도 9는 도 1의 리졸버의 회전자가 0o에서 45o까지 회전하는 과정에서 출력 신호 코일들에 발생되는 유기 전압 신호들을 함께 보여주는 파형도이다.
도 10은 리졸버 동작의 시뮬레이션을 위하여 신호원 코일에 입력될 전압 신호의 파형을 보여주는 도면이다.
도 11은, 도 10의 입력 전압 신호가 종래의 리졸버의 신호원 코일에 입력됨에 의하여, 출력 신호 코일들에 발생되는 유기 전압 신호들을 함께 보여주는 파형도이다.
도 12는, 도 10의 입력 전압 신호가 본 실시예의 리졸버의 신호원 코일에 입력됨에 의하여, 출력 신호 코일들에 발생되는 유기 전압 신호들을 함께 보여주는 파형도이다.
도 13은 본 실시예의 리졸버의 신호원 코일에 입력될 전압 신호를 파형 측정기에 의하여 측정한 결과를 보여주는 도면이다.
도 14는, 도 13의 입력 전압 신호가 본 실시예의 리졸버의 신호원 코일에 입력된 후, 출력 신호 코일들에 발생되는 유기 전압 신호들을 파형 측정기에 의하여 측정한 결과를 보여주는 도면이다.
하기의 설명 및 첨부된 도면은 본 발명에 따른 동작을 이해하기 위한 것이며, 본 기술 분야의 통상의 기술자가 용이하게 구현할 수 있는 부분은 생략될 수 있다.
또한 본 명세서 및 도면은 본 발명을 제한하기 위한 목적으로 제공된 것은 아니고, 본 발명의 범위는 청구의 범위에 의하여 정해져야 한다. 본 명세서에서 사용된 용어들은 본 발명을 가장 적절하게 표현할 수 있도록 본 발명의 기술적 사상에 부합하는 의미와 개념으로 해석되어야 한다.
이하 첨부된 도면들을 참조하여 본 발명의 실시예가 상세히 설명된다.
도 1은 본 발명의 일 실시예의 제조 방법에 의한 리졸버의 외형을 보여준다. 도 2는 도 1의 리졸버에서의 회전자(11)의 외형을 보여주는 사시도이다. 도 3은 도 1의 리졸버의 구성 및 동작을 설명하기 위한 도면이다.
도 1 내지 3을 참조하여, 본 발명의 일 실시예의 리졸버를 설명하면 다음과 같다.
본 발명의 일 실시예의 리졸버(resolver)는 전동기(도시되지 않음)의 회전 각도를 검출하기 위하여 회전자(11)와 고정자(121, 122, 123A 및 123B)를 구비한다.
회전자(11)의 주위에 설치된 고정자(121, 122, 123A 및 123B)는 코어(121), 신호원 코일(122), 및 복수의 출력 신호 코일들(123A,123B)을 포함한다. 본 실시예의 경우, 복수의 출력 신호 코일들(123A,123B)은 제1 출력 신호 코일(123A) 및 제2 출력 신호 코일(123B)을 포함한다
코어(121)에는 회전자(11)의 회전 방향을 따라 일정한 간격으로 돌출부(121p)들이 형성된다.
신호원 코일(122)은, 코어(121)의 돌출부(121p)들에 감기어져서, 입력 전압 신호(Ssou)가 인가됨에 따라 교류 자계를 발생시킨다.
복수의 출력 신호 코일들(123A,123B)은, 코어(121)의 서로 다른 돌출부(121p)들에 순서대로 번갈아가면서 감기어짐에 의하여, 신호원 코일(122)로부터의 교류 자계와 회전자(11)의 회전에 따라 서로 다른 위상의 유기 전압 신호들을 발생시킨다.
본 실시예의 경우, 제1 출력 신호 코일(123A)은 코어(121)의 돌출부(121p)들 중에서 홀수번째 돌출부들에 감기어진다. 제2 출력 신호 코일(123B)은 코어(121)의 돌출부(121p)들 중에서 짝수번째 돌출부들에 감기어진다.
제1 출력 신호 코일(123A)은 신호원 코일(122)로부터의 교류 자계와 회전자(11)의 회전에 따라 제1 유기 전압 신호(Sout1)를 발생시킨다. 제2 출력 신호 코일(123B)은 신호원 코일(122)로부터의 교류 자계와 회전자(11)의 회전에 따라 제2 유기 전압 신호(Sout2)를 발생시킨다.
여기에서, 제1 출력 신호 코일(123A)과 제2 출력 신호 코일(123B)이 코어(121)의 서로 다른 위치의 돌출부들에 교호하게 감기어짐에 따라, 회전자(11)의 회전 방향으로의 외주면 형상에 따른 자기저항(reluctance)의 작용으로 인하여, 제1 유기 전압 신호(Sout1)와 제2 유기 전압 신호(Sout2) 사이에 90o의 위상 차이가 발생된다.
회전자(11)는 전동기의 회전자 축(도시되지 않음)과 연결되어 전동기의 회전자(도시되지 않음)와 함께 회전한다.
회전자(11)의 회전 방향으로의 외주면에는 반복적인 굴곡이 형성되어 있다. 또한, 회전자(11)는, 상기 외주면의 반복적인 굴곡에 따라, 코어(121)의 돌출부(121p)들을 향하여 복수 개의 돌출 극들(P1 내지 P4)을 갖는다.
코어(121)의 돌출부(121p)들의 개수(Z)는, 출력 신호 코일들(123A,123B)의 개수 m과 회전자(11)의 돌출 극들(P1 내지 P4)의 개수 X를 곱한 결과에 비례한다. 흔히 코어(121)의 돌출부(121p)들의 개수(Z)는 고정자의 치수(齒數)로 불리워진다. 코어(121)의 돌출부(121p)들의 개수(Z)는 즉, 아래의 수학식 1에 의하여 코어(121)의 돌출부(121p)들의 개수(Z)가 설정될 수 있다.
본 실시예의 경우, k는 1이고, m은 2이며, X는 4이다. 따라서, 본 실시예에서의 코어(121)의 돌출부(121p)들은 16 개이다.
복수의 출력 신호 코일들(123A,123B) 중에서 어느 한 출력 신호 코일(123A 또는 123B)이 코어(121)의 어느 한 돌출부(121p)에 감기는 횟수 Nip는, 두 개의 출력 신호 코일들(123A,123B) 중에서 어느 한 출력 신호 코일(123A 또는 123B)의 총 감김 횟수를 Nt라 하면, 아래의 수학식 2에 의하여 설정될 수 있다.

상기 수학식 2에서 우변의 분모가 Z가 아니고 그 절반인 이유는, 두 개의 출력 신호 코일들(123A,123B)이 코어(121)의 서로 다른 돌출부들에 순서대로 번갈아가면서 감기어지기 때문이다.
요약하면, 신호원 코일(122)은 코어(121)의 각 돌출부(121p)에 동일한 횟수로서 감기어져 있다. 제1 출력 신호 코일(123A)은 코어(121)의 각 홀수번째 돌출부에 동일한 횟수로서 감기어져 있다. 제2 출력 신호 코일(123B)은 코어(121)의 각 짝수번째 돌출부에 동일한 횟수로서 감기어져 있다. 그래서 코어(121)의 각 돌출부(121p)에 대하여 동일한 총 감김 횟수가 적용된다.
즉, 복수의 출력 신호 코일들(123A,123B)이 코어(121)의 서로 다른 돌출부들에 순서대로 번갈아가면서 동일한 횟수로서 감기어지더라도, 회전자(11)의 회전 방향으로의 외주면 형상에 따른 자기저항(reluctance)의 작용으로 인하여, 서로 다른 위상의 유기 전압 신호들(Sout1,Sout2)을 취득할 수 있다. 그래서 코어(121)의 각 돌출부(121p)에 대하여 총 감김 횟수도 동일하게 적용될 수 있다.
따라서, 본 발명의 실시예의 리졸버에 의하면 다음과 같은 효과들이 발생된다.
첫째, 리졸버의 제조 시에 출력 신호 코일들(123A,123B)의 감김 횟수의 오류가 해소될 수 있다.
둘째, 코어(121)의 각 돌출부(121p)의 총 감김 횟수가 동일한 조건에서 고정자의 코어(121)가 설계될 수 있으므로, 효율적인 고정자의 구조가 설계될 수 있다.
도 4는 도 1의 리졸버(1)의 출력 신호들(Sout1,Sout2)이 변환되어 사용됨을 설명하기 위한 도면이다.
도 1 내지 4를 참조하면, 신호원 코일(122)에 입력되어 교류 자계를 발생시키는 입력 전압 신호(Ssou)는 아래의 수학식 3과 같다.
상기 수학식 3에서 E0는 첨단(peak) 전압 값을, ω는 각속도를, 그리고 t는 시간을 가리킨다.
제1 출력 신호 코일(123A)의 출력 신호인 제1 유기 전압 신호(Sout1)는 아래의 수학식 4와 같다.
상기 수학식 4에서 K는 첨단(peak) 전압 값(E0)에 비례한 상수로서, 리졸버(11)에서의 누설 자속량 및 쇄교 자속량에 따라 결정된다. X는 회전자(11)의 돌출 극들(P1 내지 P4)의 개수를, 그리고 θ는 회전자(11)의 회전 각도를 가리킨다.
제2 출력 신호 코일(123B)의 출력 신호인 제2 유기 전압 신호(Sout2)는 아래의 수학식 5와 같다.
신호 변환기(4)는 리졸버(1)로부터의 제1 유기 전압 신호(Sout1) 및 제2 유기 전압 신호(Sout2)에 각각 상응하는 디지털 정현파 신호들을 구하여 전동기의 제어기(도시되지 않음)에 제공한다.
신호 변환기(4)의 특성에 따른 상수를 k라 하면, 제1 유기 전압 신호(Sout1)에 상응하는 디지털 정현파 신호는 k cos θ이고, 제2 유기 전압 신호(Sout2)에 상응하는 디지털 정현파 신호는 k sin θ이다.
여기에서, 신호 변환기(4)의 입력 및 출력 신호들을 살펴 보면, 4 개의 돌출 극들(P1 내지 P4)을 가진 회전자(11)에 있어서, 회전자(11)의 90o 회전 범위에 대하여 180o 범위의 정현파가 발생됨을 알 수 있다. 통상적으로, 회전자(11)의 회전 각도를 기구 각도라 부르고, 신호 변환기(4)의 출력 회전 각도를 전기 각도라 부른다. 즉, 4 개의 돌출 극들(P1 내지 P4)을 가진 회전자(11)인 경우, 전기 각도는 기구 각도의 2 배이다. 이하에서는, 기구 각도라 불리어지는 회전자(11)의 회전 각도만이 제시될 것이다.
도 5는 종래의 리졸버의 제조 방법에서 고정자의 코어(521)에 코일들(522, 523A, 523B)이 감겨지는 방법을 설명하기 위한 도면이다. 도 5에서 십자(+) 표시는 코일들이 감길 때에 뒤쪽으로 들어가는 방향을, 그리고 점(.) 표시는 코일들이 감길 때에 앞쪽으로 나오는 방향을 각각 가리킨다. 도 5에서 참조 부호 522는 신호원 코일을, 523A는 제1 출력 신호 코일을, 523B는 제2 출력 신호 코일, 그리고 521p1 내지 521p4는 돌출부들의 일부를 각각 가리킨다.
도 5를 참조하면, 종래의 리졸버에서는, 고정자의 코어(521)의 돌출부들(예를 들어, 521p1 내지 521p4) 각각에 복수의 출력 신호 코일들(522, 523A, 523B)이 함께 감기어진다.
따라서, 아래의 표 1에 도시된 바와 같이, 종래의 리졸버의 고정자에 있어서, 서로 다른 위상의 유기 전압 신호들을 얻기 위하여, 출력 신호 코일들(523A, 523B) 각각은 각 돌출부(예를 들어, 521p1 내지 521p4)에 서로 다른 횟수로서 감기어져야만 한다. 그래서, 코어의 각 돌출부(예를 들어, 521p1 내지 521p4)에 대한 총 감김 횟수도 서로 다르게 된다.
아래의 표 1은 종래의 어느 한 리졸버에서 고정자의 코어(521)의 돌출부들(예를 들어, 521p1 내지 521p4) 각각에 감기는 코일들의 감김 횟수를 보여준다. 아래의 표 1에서 음의 부호(-)는 감김 방향이 반대임을 가리킨다.
| 돌출부 번호 | 신호원 코일의 감김 횟수 | 제1 출력 신호 코일의 감김 횟수 | 제2 출력 신호 코일의 감김 횟수 | 총 감김 횟수 |
| 1 | 24 | 10 | 62 | 96 |
| 2 | -24 | 45 | 45 | 114 |
| 3 | 24 | 62 | 10 | 96 |
| 4 | -24 | 56 | -28 | 108 |
| 5 | 24 | 28 | -56 | 108 |
| 6 | -24 | -10 | -62 | 96 |
| 7 | 24 | -45 | -45 | 114 |
| 8 | -24 | -62 | -10 | 96 |
| 9 | 24 | -56 | 28 | 108 |
| 10 | -24 | -28 | 56 | 108 |
| ................. | ................. | ................. | ................. | ................. |
따라서, 상기와 같은 종래의 리졸버에 의하면 다음과 같은 문제점들이 있다.
첫째, 리졸버의 제조 시에 출력 신호 코일들(523A, 523B)의 감김 횟수의 오류가 자주 발생한다.
둘째, 총 감김 횟수가 가장 많은 돌출부(표 1의 경우에 제2 또는 제7 돌출부)를 기준으로 고정자의 코어(521)가 설계되어야 하므로, 효율적인 고정자의 구조가 설계될 수 없다.
도 6은 도 1의 실시예의 리졸버의 제조 방법에서 고정자의 코어(121)에 코일들(122, 123A, 123B)이 감겨지는 방법을 설명하기 위한 도면이다. 도 6에서 십자(+) 표시는 코일들이 감길 때에 뒤쪽으로 들어가는 방향을, 그리고 점(.) 표시는 코일들이 감길 때에 앞쪽으로 나오는 방향을 각각 가리킨다. 도 6에서 참조 부호 122는 신호원 코일을, 123A는 제1 출력 신호 코일을, 123B는 제2 출력 신호 코일, 그리고 121p1 내지 121p4는 돌출부들의 일부를 각각 가리킨다.
도 1 내지 3 및 도 6을 참조하면, 본 실시예의 리졸버의 제조 방법에 있어서, 복수의 출력 신호 코일들(123A,123B)은 코어(121)의 서로 다른 돌출부들에 순서대로 번갈아가면서 감기어진다. 제1 출력 신호 코일(123A)은 코어(121)의 돌출부들(예를 들어, 121p1 내지 121p4) 중에서 홀수번째 돌출부들에 감기어진다. 제2 출력 신호 코일(123B)은 코어(121)의 돌출부들(예를 들어, 121p1 내지 121p4) 중에서 짝수번째 돌출부들에 감기어진다.
따라서, 아래의 표 2에 도시된 바와 같이, 제1 출력 신호 코일(123A)은 코어(121)의 각 홀수번째 돌출부에 동일한 횟수로서 감기어질 수 있고, 제2 출력 신호 코일(123B)은 코어(121)의 각 짝수번째 돌출부에 동일한 횟수로서 감기어질 수 있다. 그래서 코어(121)의 각 돌출부(121p)에 대하여 동일한 총 감김 횟수가 적용될 수 있다.
즉, 복수의 출력 신호 코일들(123A,123B)이 코어(121)의 서로 다른 돌출부들에 순서대로 번갈아가면서 동일한 횟수로서 감기어지더라도, 회전자(11)의 회전 방향으로의 외주면 형상에 따른 자기저항(reluctance)의 작용으로 인하여, 서로 다른 위상의 유기 전압 신호들(Sout1,Sout2)을 취득할 수 있다. 그래서 코어(121)의 각 돌출부(121p)에 대하여 총 감김 횟수도 동일하게 적용될 수 있다.
아래의 표 2는 본 실시예의 리졸버의 제조 방법에서 고정자의 코어(121)의 돌출부들(예를 들어, 121p1 내지 121p4) 각각에 감기는 코일들의 감김 횟수를 보여준다. 아래의 표 2에서 음의 부호(-)는 감김 방향이 반대임을 가리킨다.
| 돌출부 번호 | 신호원 코일의 감김 횟수 | 제1 출력 신호 코일의 감김 횟수 | 제2 출력 신호 코일의 감김 횟수 | 총 감김 횟수 |
| 1 또는 9 | 15 | 50 | 0 | 65 |
| 2 또는 10 | -15 | 0 | 50 | 65 |
| 3 또는 11 | 15 | -50 | 0 | 65 |
| 4 또는 12 | -15 | 0 | -50 | 65 |
| 5 또는 13 | 15 | 50 | 0 | 65 |
| 6 또는 14 | -15 | 0 | 50 | 65 |
| 7 또는 15 | 15 | -50 | 0 | 65 |
| 8 또는 16 | -15 | 0 | -50 | 65 |
따라서, 본 발명의 실시예의 리졸버 및 그 제조 방법에 의하면 다음과 같은 효과들이 발생된다.
첫째, 리졸버의 제조 시에 출력 신호 코일들(123A,123B)의 감김 횟수의 오류가 해소될 수 있다.
둘째, 돌출부들(예를 들어, 121p1 내지 121p4) 각각의 총 감김 횟수가 동일한 조건에서 고정자의 코어(121)가 설계될 수 있으므로, 효율적인 고정자의 구조가 설계될 수 있다.
도 7은, 도 1의 실시예의 리졸버에서, 회전자(11)의 위치에 따라 고정자의 각 슬롯(SL1 내지 SL3)에서 자속의 변화량이 달라짐을 설명하기 위한 도면이다.
도 7에서 참조 부호 SL1 내지 SL3은 고정자의 코어(121)에 형성된 슬롯(slot)들을, Psc는 회전자(11)의 굴곡점을, 11ta 및 11tb 각각은 회전자(11)의 1/8 회전 거리를, 그리고 11tc는 회전자(11)의 1/4 회전 거리를 각각 가리킨다. 도 7에서 도 1 내지 3과 동일한 참조 부호는 동일한 기능의 대상을 가리킨다.
잘 알려져 있는 바와 같이, 출력 신호 코일들(123A,123B)에 유기되는 전압(e)은 쇄교 자속의 변화를 억제하기 위하여 발생된다. 즉, 아래의 수학식 6의 로렌쯔(Lorentz)의 법칙에 의하면, 출력 신호 코일들(123A,123B)에 유기되는 전압(e)은 쇄교 자속(Φ)의 변화를 억제하려는 방향 및 쇄교 자속(Φ)의 변화율에 비례한 크기를 가진다.

따라서, 도 7의 상태에 있어서, 제1 슬롯(SL1)과 제3 슬롯(SL3)에서는 회전자(11)의 근접으로 인하여 자기 저항(reluctance)이 적어지므로 쇄교 자속(Φ)의 변화율이 커진다. 하지만, 제2 슬롯(SL2)에서는 회전자(11)의 멀어짐으로 인하여 자기 저항(reluctance)이 커지므로 쇄교 자속(Φ)의 변화율이 적어진다.
이와 같은 동작 원리에 의하여, 복수의 출력 신호 코일들(123A,123B)이 코어(121)의 서로 다른 돌출부들에 순서대로 번갈아가면서 동일한 횟수로서 감기어지더라도, 회전자(11)의 회전 방향으로의 외주면 형상에 따른 자기저항(reluctance)의 작용으로 인하여, 서로 다른 위상의 유기 전압 신호들(Sout1,Sout2)을 취득할 수 있다. 그래서 코어(121)의 각 돌출부(121p)에 대하여 총 감김 횟수도 동일하게 적용될 수 있다. 본 실시예의 경우, 제1 유기 전압 신호(Sout1)와 제2 유기 전압 신호(Sout2) 사이에 90o의 위상 차이가 발생된다. 이와 관련된 내용이 도 8a 내지 9를 참조하여 아래에 설명된다.
도 8a 내지 8f는 도 1의 리졸버의 회전자(11)가 0o에서 45o까지 회전하는 상태를 보여준다. 도 9는 도 1의 리졸버의 회전자(11)가 0o에서 45o까지 회전하는 과정에서 출력 신호 코일들(123A,123B)에 발생되는 유기 전압 신호들(Sout1,Sout2)을 함께 보여준다.
도 8a 및 9를 참조하면, 회전자(11)의 회전 각도가 0o인 상태에서 제1 출력 신호 코일(123A)에 작용하는 쇄교 자속의 평균 변화율은 가장 높으므로, 그 유기 전압 신호(Sout1)의 첨단(peak) 전압 값이 가장 크다. 이와 반대로, 회전자(11)의 회전 각도가 0o인 상태에서 제2 출력 신호 코일(123B)에 작용하는 쇄교 자속의 평균 변화율은 가장 낮으므로, 그 유기 전압 신호(Sout2)의 첨단(peak) 전압 값이 가장 적다.
도 8b 및 9를 참조하면, 회전자(11)의 회전 각도가 9o인 상태에서 제1 출력 신호 코일(123A)에 작용하는 쇄교 자속의 평균 변화율은 회전자(11)의 회전 각도가 0o인 상태에 비하여 낮아진다. 따라서, 회전자(11)의 회전 각도가 9o인 상태에서 제1 출력 신호 코일(123A)의 첨단 전압 값은 회전자(11)의 회전 각도가 0o인 상태에 비하여 낮아진다.
이와 반대로, 회전자(11)의 회전 각도가 9o인 상태에서 제2 출력 신호 코일(123B)에 작용하는 쇄교 자속의 평균 변화율은 회전자(11)의 회전 각도가 0o인 상태에 비하여 높아진다. 따라서, 회전자(11)의 회전 각도가 9o인 상태에서 제2 출력 신호 코일(123B)의 첨단 전압 값은 회전자(11)의 회전 각도가 0o인 상태에 비하여 높아진다.
도 8c 및 9를 참조하면, 회전자(11)의 회전 각도가 18o인 상태에서 제1 출력 신호 코일(123A)에 작용하는 쇄교 자속의 평균 변화율은 회전자(11)의 회전 각도가 9o인 상태에 비하여 낮아진다. 따라서, 회전자(11)의 회전 각도가 18o인 상태에서 제1 출력 신호 코일(123A)의 첨단 전압 값은 회전자(11)의 회전 각도가 9o인 상태에 비하여 낮아진다.
이와 반대로, 회전자(11)의 회전 각도가 18o인 상태에서 제2 출력 신호 코일(123B)에 작용하는 쇄교 자속의 평균 변화율은 회전자(11)의 회전 각도가 9o인 상태에 비하여 높아진다. 따라서, 회전자(11)의 회전 각도가 18o인 상태에서 제2 출력 신호 코일(123B)의 첨단 전압 값은 회전자(11)의 회전 각도가 9o인 상태에 비하여 높아진다.
도 8d 및 9를 참조하면, 회전자(11)의 회전 각도가 27o인 상태에서 제1 출력 신호 코일(123A)에 작용하는 쇄교 자속의 평균 변화율은 회전자(11)의 회전 각도가 18o인 상태에 비하여 낮아진다. 따라서, 회전자(11)의 회전 각도가 27o인 상태에서 제1 출력 신호 코일(123A)의 첨단 전압 값은 회전자(11)의 회전 각도가 18o인 상태에 비하여 낮아진다.
이와 반대로, 회전자(11)의 회전 각도가 27o인 상태에서 제2 출력 신호 코일(123B)에 작용하는 쇄교 자속의 평균 변화율은 회전자(11)의 회전 각도가 18o인 상태에 비하여 높아진다. 따라서, 회전자(11)의 회전 각도가 27o인 상태에서 제2 출력 신호 코일(123B)의 첨단 전압 값은 회전자(11)의 회전 각도가 18o인 상태에 비하여 높아진다.
위와 마찬가지로, 도 8e 및 9를 참조하면, 회전자(11)의 회전 각도가 36o인 상태에서 제1 출력 신호 코일(123A)에 작용하는 쇄교 자속의 평균 변화율은 회전자(11)의 회전 각도가 27o인 상태에 비하여 낮아진다. 따라서, 회전자(11)의 회전 각도가 36o인 상태에서 제1 출력 신호 코일(123A)의 첨단 전압 값은 회전자(11)의 회전 각도가 27o인 상태에 비하여 낮아진다.
이와 반대로, 회전자(11)의 회전 각도가 36o인 상태에서 제2 출력 신호 코일(123B)에 작용하는 쇄교 자속의 평균 변화율은 회전자(11)의 회전 각도가 27o인 상태에 비하여 높아진다. 따라서, 회전자(11)의 회전 각도가 36o인 상태에서 제2 출력 신호 코일(123B)의 첨단 전압 값은 회전자(11)의 회전 각도가 27o인 상태에 비하여 높아진다.
끝으로, 도 8f 및 9를 참조하면, 회전자(11)의 회전 각도가 45o인 상태에서 제1 출력 신호 코일(123A)에 작용하는 쇄교 자속의 평균 변화율은 회전자(11)의 회전 각도가 36o인 상태에 비하여 낮아진다. 따라서, 회전자(11)의 회전 각도가 45o인 상태에서 제1 출력 신호 코일(123A)의 첨단 전압 값은 가장 낮아진다.
이와 반대로, 회전자(11)의 회전 각도가 45o인 상태에서 제2 출력 신호 코일(123B)에 작용하는 쇄교 자속의 평균 변화율은 회전자(11)의 회전 각도가 36o인 상태에 비하여 높아진다. 따라서, 회전자(11)의 회전 각도가 45o인 상태에서 제2 출력 신호 코일(123B)의 첨단 전압 값은 가장 높아진다.
도 10은 리졸버 동작의 시뮬레이션을 위하여 신호원 코일에 입력될 입력 전압 신호(Ssou)의 파형을 보여준다.
도 11은, 도 10의 입력 전압 신호가 종래의 리졸버의 신호원 코일(도 5의 522)에 입력됨에 의하여, 출력 신호 코일들(도 5의 523A,523B)에 발생되는 유기 전압 신호들(Sout1,Sout2)을 함께 보여준다.
도 12는, 도 10의 입력 전압 신호가 본 실시예의 리졸버의 신호원 코일(도 2 및 6의 122)에 입력됨에 의하여, 출력 신호 코일들(도 6의 123A,123B)에 발생되는 유기 전압 신호들(Sout1,Sout2)을 함께 보여준다.
도 10 내지 12를 참조하면, 동일한 입력 전압 신호(Ssou)가 종래의 리졸버의 신호원 코일(도 5의 522)과 본 실시예의 리졸버의 신호원 코일(도 2 및 6의 122)에 입력되는 경우, 종래의 리졸버의 유기 전압 신호들(Sout1,Sout2)은 서로 90o의 위상차를 가지고, 본 실시예의 리졸버의 유기 전압 신호들(Sout1,Sout2)도 서로 90o의 위상차를 가진다.
도 13은 본 실시예의 리졸버의 신호원 코일(도 2 및 6의 122)에 입력될 전압 신호를 파형 측정기에 의하여 측정한 결과를 보여준다.
도 14는, 도 13의 입력 전압 신호가 본 실시예의 리졸버의 신호원 코일(도 2 및 6의 122)에 입력된 후, 출력 신호 코일들(도 6의 123A,123B)에 발생되는 유기 전압 신호들을 파형 측정기에 의하여 측정한 결과를 보여준다.
도 10 내지 14를 참조하면, 본 실시예의 리졸버의 유기 전압 신호들(Sout1,Sout2)은 서로 90o의 위상차를 가질 수 있음을 확인할 수 있다.
이상 설명된 바와 같이, 본 발명의 실시예의 리졸버에 의하면, 복수의 출력 신호 코일들은, 코어의 서로 다른 돌출부들에 순서대로 번갈아가면서 감기어진다.
이에 따라, 복수의 출력 신호 코일들 각각은, 각 돌출부에 동일한 횟수로서 감기어지더라도, 회전자의 회전에 따라 서로 다른 위상의 유기 전압 신호들을 취득할 수 있다. 그래서 코어의 각 돌출부에 대하여 총 감김 횟수도 동일하게 적용될 수 있다.
요약하면, 본 발명의 실시예에 의하면, 복수의 출력 신호 코일들 각각이 각 돌출부에 동일한 횟수로서 감기어질 수 있고, 이에 따라 코어의 각 돌출부에 대하여 총 감김 횟수도 동일하게 적용될 수 있다.
따라서, 본 발명의 실시예의 리졸버 및 그 제조 방법에 의하면 다음과 같은 효과들이 발생된다.
첫째, 리졸버의 제조 시에 출력 신호 코일들의 감김 횟수의 오류가 해소될 수 있다.
둘째, 돌출부들 각각의 총 감김 횟수가 동일한 조건에서 고정자의 코어가 설계될 수 있으므로, 효율적인 고정자의 구조가 설계될 수 있다.
이제까지 본 발명에 대하여 바람직한 실시예를 중심으로 살펴보았다. 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자는 본 발명의 본질적인 특성에서 벗어나지 않는 범위에서 변형된 형태로 본 발명을 구현할 수 있음을 이해할 것이다.
그러므로 상기 개시된 실시예는 한정적인 관점이 아니라 설명적인 관점에서 고려되어야 한다. 본 발명의 범위는 전술한 설명이 아니라 특허청구범위에 나타나 있으며, 특허청구범위에 의해 청구된 발명 및 청구된 발명과 균등한 발명들은 본 발명에 포함된 것으로 해석되어야 한다.
전동기 자체에 이용될 가능성이 있음.
11 : 회전자, 121 : 고정자의 코어,
121p : 코어의 돌출부, 122 : 고정자의 신호원 코일,
123A : 제1 출력 신호 코일, 123B : 제2 출력 신호 코일,
θ : 전동기의 회전 각도, Ssou : 입력 전압 신호,
11t : 회전 방향으로의 외주면, P1 내지 P4 : 돌출 극들,
Sout1 : 제1 유기 전압 신호, Sout2 : 제2 유기 전압 신호,
4 : 신호 변환기, 521 : 고정자의 코어,
521p1 내지 521p4 : 코어의 돌출부들, 522 : 고정자의 신호원 코일,
523A : 제1 출력 신호 코일, 523B : 제2 출력 신호 코일,
121p1 내지 121p4 : 코어의 돌출부들, SL1 내지 SL3 : 슬롯들,
Psc : 굴곡점, 11ta, 11tb : 1/8 회전 거리,
11tc : 1/4 회전 거리.
121p : 코어의 돌출부, 122 : 고정자의 신호원 코일,
123A : 제1 출력 신호 코일, 123B : 제2 출력 신호 코일,
θ : 전동기의 회전 각도, Ssou : 입력 전압 신호,
11t : 회전 방향으로의 외주면, P1 내지 P4 : 돌출 극들,
Sout1 : 제1 유기 전압 신호, Sout2 : 제2 유기 전압 신호,
4 : 신호 변환기, 521 : 고정자의 코어,
521p1 내지 521p4 : 코어의 돌출부들, 522 : 고정자의 신호원 코일,
523A : 제1 출력 신호 코일, 523B : 제2 출력 신호 코일,
121p1 내지 121p4 : 코어의 돌출부들, SL1 내지 SL3 : 슬롯들,
Psc : 굴곡점, 11ta, 11tb : 1/8 회전 거리,
11tc : 1/4 회전 거리.
Claims (12)
- 전동기의 회전 각도를 검출하기 위하여 회전자와 고정자를 구비한 리졸버(resolver)의 제조 방법에 있어서,
상기 회전자의 주위에 설치된 상기 고정자의 제조 방법은,
상기 회전자의 회전 방향을 따라 일정한 간격으로 돌출부들이 형성된 코어를 제조함;
입력 전압 신호가 인가됨에 따라 교류 자계를 발생시키도록 상기 코어의 상기 돌출부들에 감기어지는 신호원 코일을 형성함; 및
상기 신호원 코일로부터의 교류 자계와 상기 회전자의 회전에 따라 서로 다른 위상의 유기 전압 신호들을 발생시키도록, 상기 코어의 서로 다른 돌출부들에 순서대로 번갈아가면서 감기어지는 복수의 출력 신호 코일들을 형성함을 포함한 리졸버의 제조 방법. - 제1항에 있어서, 상기 회전자는,
상기 전동기의 회전자 축과 연결되도록 형성되는 리졸버의 제조 방법. - 제2항에 있어서,
상기 회전자의 회전 방향으로의 외주면에는 반복적인 굴곡이 형성되는 리졸버의 제조 방법. - 제3항에 있어서, 상기 회전자에는,
상기 외주면의 반복적인 굴곡에 따라, 상기 코어의 상기 돌출부들을 향하여 복수 개의 돌출 극들이 형성되는 리졸버의 제조 방법. - 제4항에 있어서, 상기 코어의 상기 돌출부들의 개수(Z)는,
상기 출력 신호 코일들의 개수(m)와 상기 회전자의 상기 돌출 극들의 개수(X)를 곱한 결과에 비례한 리졸버의 제조 방법. - 제5항에 있어서, 상기 복수의 출력 신호 코일들 중에서 어느 한 출력 신호 코일이 상기 코어의 어느 한 돌출부에 감기는 횟수 Nip는,
어느 한 출력 신호 코일의 총 감김 횟수를 Nt라 하면, Nip = 2 Nt / Z 의 수학식에 의하여 구해지는 리졸버의 제조 방법. - 전동기의 회전 각도를 검출하기 위하여 회전자와 고정자를 구비한 리졸버(resolver)에 있어서,
상기 회전자의 주위에 설치된 상기 고정자는,
상기 회전자의 회전 방향을 따라 일정한 간격으로 돌출부들이 형성된 코어;
상기 코어의 상기 돌출부들에 감겨서, 입력 전압 신호가 인가됨에 따라 교류 자계를 발생시키는 신호원 코일;
상기 코어의 상기 돌출부들 중에서 홀수번째 돌출부들에 감기어지는 제1 출력 신호 코일; 및
상기 코어의 상기 돌출부들 중에서 짝수번째 돌출부들에 감기어지는 제2 출력 신호 코일을 포함한 리졸버. - 제7항에 있어서, 상기 회전자는,
상기 전동기의 회전자 축과 연결되어 상기 전동기의 회전자와 함께 회전하는 리졸버. - 제7항에 있어서,
상기 회전자의 회전 방향으로의 외주면에는 반복적인 굴곡이 형성되어 있는 리졸버. - 제9항에 있어서, 상기 회전자는,
상기 외주면의 반복적인 굴곡에 따라, 상기 코어의 상기 돌출부들을 향하여 복수 개의 돌출 극들을 갖는 리졸버. - 제7항에 있어서,
상기 제1 출력 신호 코일은 상기 신호원 코일로부터의 교류 자계와 상기 회전자의 회전에 따라 제1 유기 전압 신호를 발생시키고,
상기 제2 출력 신호 코일은 상기 신호원 코일로부터의 교류 자계와 상기 회전자의 회전에 따라 제2 유기 전압 신호를 발생시키며,
상기 제1 출력 신호 코일과 상기 제2 출력 신호 코일이 상기 코어의 서로 다른 위치의 돌출부들에 교호하게 감기어짐에 따라, 상기 제1 유기 전압 신호와 상기 제2 유기 전압 신호 사이에 90o의 위상 차이가 발생되는 리졸버. - 제7항에 있어서,
상기 신호원 코일은 상기 코어의 각 돌출부에 동일한 횟수로서 감기어져 있고,
상기 제1 출력 신호 코일은 상기 코어의 상기 각 홀수번째 돌출부에 동일한 횟수로서 감기어져 있으며,
상기 제2 출력 신호 코일은 상기 코어의 상기 각 짝수번째 돌출부에 동일한 횟수로서 감기어져 있음에 따라,
상기 코어의 각 돌출부에 대하여 동일한 총 감김 횟수가 적용되는 리졸버.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120123742A KR101964371B1 (ko) | 2012-11-02 | 2012-11-02 | 리졸버 및 그 제조 방법 |
| US13/897,494 US9412516B2 (en) | 2012-11-02 | 2013-05-20 | Resolver and method of manufacturing the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120123742A KR101964371B1 (ko) | 2012-11-02 | 2012-11-02 | 리졸버 및 그 제조 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140057078A true KR20140057078A (ko) | 2014-05-12 |
| KR101964371B1 KR101964371B1 (ko) | 2019-04-01 |
Family
ID=50621766
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120123742A KR101964371B1 (ko) | 2012-11-02 | 2012-11-02 | 리졸버 및 그 제조 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9412516B2 (ko) |
| KR (1) | KR101964371B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017082462A1 (ko) * | 2015-11-13 | 2017-05-18 | 엘에스오토모티브 주식회사 | 레졸버 |
| KR20200005728A (ko) * | 2018-07-06 | 2020-01-16 | (주)글로벌시스템즈 | 가변 릴럭턴스형 리졸버 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014077471A1 (ko) * | 2012-11-19 | 2014-05-22 | 대성전기공업 주식회사 | 레졸버용 스테이터 및 이를 포함하는 레졸버 |
| JP6009493B2 (ja) * | 2014-05-21 | 2016-10-19 | ミネベア株式会社 | レゾルバ |
| JP2018040660A (ja) * | 2016-09-07 | 2018-03-15 | 多摩川精機株式会社 | 位相変調方式の冗長系2相出力型レゾルバ及びその信号出力方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20070039385A (ko) | 2005-10-07 | 2007-04-11 | 미쓰비시덴키 가부시키가이샤 | 리졸버 |
| JP2009098028A (ja) * | 2007-10-17 | 2009-05-07 | Minebea Co Ltd | レゾルバ、計測装置、信号処理方法およびプログラム |
| JP2009168493A (ja) * | 2008-01-11 | 2009-07-30 | Nippon Densan Corp | レゾルバ、モータ、パワーステアリング装置およびレゾルバの製造方法 |
| JP2012173094A (ja) * | 2011-02-21 | 2012-09-10 | Jtekt Corp | レゾルバ |
| JP2012526969A (ja) * | 2009-05-15 | 2012-11-01 | タイコ・エレクトロニクス・ベルギー・イーシー・ビーブイビーエー | 磁気電気角度センサ、詳細にはリラクタンス・リゾルバ |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3990062A (en) * | 1975-02-03 | 1976-11-02 | Fmc Corporation | Resolver to digital converter |
| US5949359A (en) * | 1997-05-09 | 1999-09-07 | Kollmorgen Corporation | Variable reluctance resolver to digital converter |
| KR100645585B1 (ko) * | 2004-12-14 | 2006-11-15 | 현대자동차주식회사 | 직류 모터 |
| WO2007074375A2 (en) * | 2005-12-26 | 2007-07-05 | Toyota Jidosha Kabushiki Kaisha | Magnetic resolver |
| CN101398812B (zh) * | 2007-09-27 | 2012-05-30 | 国际商业机器公司 | 生成带业务逻辑的电子表单的装置和方法 |
| EP2287569A4 (en) * | 2008-05-15 | 2013-11-27 | Tamagawa Seiki Co Ltd | ANGLE DETECTION DEVICE AND METHOD FOR THE PRODUCTION THEREOF |
| JP5203301B2 (ja) | 2009-06-19 | 2013-06-05 | ミネベア株式会社 | シートコイル型レゾルバ |
| US8710829B2 (en) | 2009-06-19 | 2014-04-29 | Minebea Co., Ltd. | Sheet coil type resolver |
| US8729887B2 (en) * | 2009-11-09 | 2014-05-20 | Aisan Kogyo Kabushiki Kaisha | Rotation angle sensor |
| KR101218563B1 (ko) | 2010-05-20 | 2013-01-04 | 대성전기공업 주식회사 | 가변자기저항형 레졸버 |
| JP5549567B2 (ja) * | 2010-12-07 | 2014-07-16 | 株式会社デンソー | 電動機装置 |
| JP5648469B2 (ja) * | 2010-12-23 | 2015-01-07 | 日立工機株式会社 | 電動工具 |
| JP2012231648A (ja) * | 2011-04-27 | 2012-11-22 | Aisan Ind Co Ltd | モータロータ及びモータ |
| JP5778976B2 (ja) * | 2011-04-28 | 2015-09-16 | ミネベア株式会社 | Vr型レゾルバおよび角度検出システム |
-
2012
- 2012-11-02 KR KR1020120123742A patent/KR101964371B1/ko active IP Right Grant
-
2013
- 2013-05-20 US US13/897,494 patent/US9412516B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20070039385A (ko) | 2005-10-07 | 2007-04-11 | 미쓰비시덴키 가부시키가이샤 | 리졸버 |
| JP2009098028A (ja) * | 2007-10-17 | 2009-05-07 | Minebea Co Ltd | レゾルバ、計測装置、信号処理方法およびプログラム |
| JP2009168493A (ja) * | 2008-01-11 | 2009-07-30 | Nippon Densan Corp | レゾルバ、モータ、パワーステアリング装置およびレゾルバの製造方法 |
| JP2012526969A (ja) * | 2009-05-15 | 2012-11-01 | タイコ・エレクトロニクス・ベルギー・イーシー・ビーブイビーエー | 磁気電気角度センサ、詳細にはリラクタンス・リゾルバ |
| JP2012173094A (ja) * | 2011-02-21 | 2012-09-10 | Jtekt Corp | レゾルバ |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017082462A1 (ko) * | 2015-11-13 | 2017-05-18 | 엘에스오토모티브 주식회사 | 레졸버 |
| US10677613B2 (en) | 2015-11-13 | 2020-06-09 | Ls Automotive Technologies Co., Ltd. | Resolver |
| KR20200005728A (ko) * | 2018-07-06 | 2020-01-16 | (주)글로벌시스템즈 | 가변 릴럭턴스형 리졸버 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101964371B1 (ko) | 2019-04-01 |
| US9412516B2 (en) | 2016-08-09 |
| US20140125324A1 (en) | 2014-05-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Ge et al. | Analysis of windings in variable reluctance resolver | |
| Ge et al. | A novel variable reluctance resolver with nonoverlapping tooth–coil windings | |
| KR101964371B1 (ko) | 리졸버 및 그 제조 방법 | |
| Alipour-Sarabi et al. | Effects of physical parameters on the accuracy of axial flux resolvers | |
| KR20120023800A (ko) | 자기전자 각도 센서, 특히 릴럭턴스 리졸버 | |
| JP4181380B2 (ja) | 回転角度検出装置および回転電機 | |
| JPWO2019123592A1 (ja) | 冗長型レゾルバ、およびそれを用いた回転角度検出装置 | |
| EP2853861B1 (en) | Position detection device | |
| CN106441081B (zh) | 无转子绕组的时栅角位移传感器 | |
| JPWO2016063324A1 (ja) | 回転角度検出装置、回転電機、及びエレベータ用巻上機 | |
| JP5939868B2 (ja) | バリアブルリラクタンス型レゾルバ | |
| JP4397788B2 (ja) | 回転角度検出装置 | |
| WO2014044043A1 (zh) | 一种无刷线性旋转变压器 | |
| JP4161172B2 (ja) | バリアブルリラクタンスレゾルバ | |
| JP6242116B2 (ja) | 回転角度検出装置 | |
| Moheyseni et al. | Slotless disk type resolver: A solution to improve the accuracy of multi-speed wound rotor resolvers | |
| JP4814858B2 (ja) | レゾルバ | |
| KR101872440B1 (ko) | 레졸버 | |
| JP4525628B2 (ja) | 回転角度検出装置 | |
| CN104200975A (zh) | 单层信号绕组径向磁路旋转变压器及信号绕组绕线方法 | |
| CN110767429B (zh) | 可高速运行的磁阻式旋转变压器 | |
| JP2012005327A (ja) | レゾルバ | |
| JP2011064710A (ja) | バリアブルリラクタンス型角度検出器 | |
| JP6976243B2 (ja) | レゾルバ | |
| JP5248559B2 (ja) | 位置検出センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| N231 | Notification of change of applicant | ||
| AMND | Amendment | ||
| E902 | Notification of reason for refusal | ||
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| AMND | Amendment | ||
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant |