KR20120105530A - 위성 위치결정 수신기 및 프록시 위치확인 시스템 - Google Patents
위성 위치결정 수신기 및 프록시 위치확인 시스템 Download PDFInfo
- Publication number
- KR20120105530A KR20120105530A KR1020127018785A KR20127018785A KR20120105530A KR 20120105530 A KR20120105530 A KR 20120105530A KR 1020127018785 A KR1020127018785 A KR 1020127018785A KR 20127018785 A KR20127018785 A KR 20127018785A KR 20120105530 A KR20120105530 A KR 20120105530A
- Authority
- KR
- South Korea
- Prior art keywords
- gnss
- receiver
- beacon
- mobile device
- location
- Prior art date
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/45—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement
- G01S19/46—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement the supplementary measurement being of a radio-wave signal type
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/34—Power consumption
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W88/00—Devices specially adapted for wireless communication networks, e.g. terminals, base stations or access point devices
- H04W88/02—Terminal devices
Abstract
사용자 단말기, 특히 모바일 장치에서 전력 소비를 감소시키기 위해, 위성 위치결정 신호들을 이용할 수 없는 경우 위치 프록시로서 지상 비콘들을 사용하는 시스템 및 방법이 소개되어 있다. 지상 비콘들의 지리적 위치는 위성 위치결정 신호 도출 위치를 위한 프록시로서 비콘들을 사용하기 위해 알려져 있을 필요는 없다.
Description
관련 특허출원에 대한 상호 참조
본 출원은 2009년 12월 18일에 출원된 미국 특허출원 제12/641,807호에 대한 우선권을 주장하며, 그 내용은 전체적으로 참조로서 원용되어 있다.
기술 분야
본 발명은 일반적으로 위성 위치결정 시스템을 위한 방법 및 장치에 관한 것으로, 더 상세하게, 그러나 배타적이지 않게는, 빌딩 내부 또는 충분한 위성 위치결정 신호들을 이용할 수 없는 시간 또는 장소에서 위치확인을 허용하는 다중-수신기 접근법에 관한 것이다.
글로벌 내비게이션 위성 시스템(Global Navigation Satellite Systems (GNSS))(현재 동작 예는 미국 나브스타(NavStar) GPS 시스템) 수신기들과 같은 위치결정 시스템들은 배터리-동작 단말기(즉, 넷북 개인 컴퓨터 및 이동 무선 장치)에 점차 통합되고 있다. 궤도 위성군(orbiting satellite constellation)은 수신기가 사용자 단말기의 위치를 추정하기 위해 사용하는 저전력 광대역 무선 신호들을 제공한다. 이들 위치 추정치는 통상적으로 함께 배치된 프로세싱 유닛에서 실행 중인 온-보드 애플리케이션들에 제공된다. 배터리 재충전, 연료 전지 충전, 또는 전원 교체 간 지속시간을 최대화하기 위해, 위치확인 수신기 서브시스템에 의한 전력 소비가 제한되어야 한다. 현재의 위치확인 수신기 서브시스템은 위치 기반 애플리케이션에 의해 능동적으로 요구되는 경우에만 전력이 인가되며, 이 경우에도 주기적으로 전력이 차단되어 주기적이지만 간헐적인 위치 추정치 세트를 유발한다.
공지된 신호 특성(전송 주파수, 주파수 대역, 복조, 프레임화(framing), 프레임 율(framing rate), 비트 패턴) 및 브로드캐스트 식별자를 갖는 다양한 지상 디지털 무선 비콘(beacon)들이 무선 로컬 영역 네트워크(wireless local area network (WLAN))의 형태로 이용될 수 있고, 광역 셀룰러 통신 네트워크(무선 통신 네트워크(Wireless Communications Network (WCN))는 사용자들이 상기 네트워크들에 액세스하게 하도록 배치된다.
본 발명은 위성 위치결정 신호들을 이용할 수 없는 경우 위치 프록시로서 지상 비콘들을 사용함으로써 사용자 단말기, 특히 모바일 장치에서 전력 소비를 감소시키기 위한 시스템 및 방법에 관한 것이다. 지상 비콘들의 지리적 위치는 위성 위치결정 신호 도출 위치를 위한 프록시로서 비콘들을 사용하기 위해 알려져 있을 필요는 없다.
예를 들어, 예시적인 실시예에서, 모바일 장치는 GNSS 신호들을 수신하도록 구성된 GNSS 수신기; 지상 비콘 신호를 수신하는 제2 수신기; 및 제어기를 포함한다. 예시적인 실시예에서, 제어기는 신호 차단으로 인해 GNSS 신호들을 이용할 수 없는 경우를 검출하며, 이에 대한 응답으로써, 수신된 지상 비콘 신호를 사용하여 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정한다. 개시된 주제의 다른 측면들은 이하 상세히 설명된다.
다음의 설명뿐 아니라 이전의 요약은 첨부된 도면과 함께 읽는 경우에 더 잘 이해될 것이다. 본 발명을 예시하기 위해, 본 발명의 예시적인 구조들이 도면들에 도시되어 있지만, 본 발명은 개시된 특정 방법 및 수단으로 한정되는 것은 아니다.
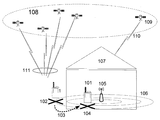
도 1은 위성 신호전송을 위한 프록시 대체물로서 로컬 지상 비콘의 사용을 예시한다.
도 2a는 위성 신호전송을 위한 프록시 대체물로서 지상 비콘의 사용시의 이벤트를 설명한다.
도 2b는 위성 신호전송을 위한 프록시 대체물로서 지상 비콘의 사용시의 이벤트를 설명한다.
도 2c는 위성 신호전송을 위한 프록시 대체물로서 지상 비콘의 불연속적인 사용시 실패 경우에서의 이벤트를 설명한다.
도 3은 모바일 또는 휴대 장치를 위한 다중-수신기 위치확인-가능 서브시스템을 설명한다.
도 4는 위성 신호전송을 위한 프록시 대체물로서 지상 무선 통신 시스템으로부터의 타이밍의 사용을 예시한다.
도 5는 위성 신호전송을 위한 프록시 대체물로서 지상 무선 통신 시스템으로부터의 수신 전력의 사용을 예시한다.
도 1은 위성 신호전송을 위한 프록시 대체물로서 로컬 지상 비콘의 사용을 예시한다.
도 2a는 위성 신호전송을 위한 프록시 대체물로서 지상 비콘의 사용시의 이벤트를 설명한다.
도 2b는 위성 신호전송을 위한 프록시 대체물로서 지상 비콘의 사용시의 이벤트를 설명한다.
도 2c는 위성 신호전송을 위한 프록시 대체물로서 지상 비콘의 불연속적인 사용시 실패 경우에서의 이벤트를 설명한다.
도 3은 모바일 또는 휴대 장치를 위한 다중-수신기 위치확인-가능 서브시스템을 설명한다.
도 4는 위성 신호전송을 위한 프록시 대체물로서 지상 무선 통신 시스템으로부터의 타이밍의 사용을 예시한다.
도 5는 위성 신호전송을 위한 프록시 대체물로서 지상 무선 통신 시스템으로부터의 수신 전력의 사용을 예시한다.
본 발명의 예시적인 실시예들이 설명될 것이다. 우선, 문제점의 상세한 개요를 제공한 후, 해결책의 더 상세한 설명을 제공한다.
자기 위치 결정 수신기(위치확인 장치 플랫폼(Location Device Platform (LDP))이라고도 공지됨)는 주기적이거나 필요할 때마다 위치 추정을 생성하여 위치확인 애플리케이션으로 전달하는데 사용되는 다중-수신기 장치이다. LDP는 배터리로 전원이 인가되어 제한된 사용 수명을 갖는다고 가정되며, 이로써 전력 소비를 제한하기 위한 기술들이 제공 서비스의 지속시간 동안에 매우 중요하다. LDP 회로망은 모바일 전화, 개인 또는 자동 내비게이션 시스템 또는 위치-인식 태그와 같은 더 큰 장치의 일부로서 디자인된다. 프록시 기법은 무선 네트워크와의 이중 통신(duplex communication)을 요구하지 않기 때문에 상기 장치는 송신 설비를 구비할 필요가 없다.
GNSS 위치확인 업데이트가 실패함으로써 결정되는 경우와 같이, GNSS 신호들이 신호 차단으로 인해 이용될 수 없는 경우, LDP는 비콘 전력, 비콘 식별자, 및/또는 신호 타이밍 어드밴스(timing advance) 또는 왕복 시간과 같은 네트워크 파라미터들을 수신한 2차 수신기(들)를 사용하여, 최종 공지된 GNSS 도출 위치가 여전히 유효한지 여부를 결정할 수 있다. 일정 간격 동안 GNSS 탐색을 유예하거나 또는 특정 이벤트를 충족할 때까지, GNSS 관련 회로망 및 프로세싱에 전력을 완전히 차단하여 배터리 수명을 연장할 수 있다.
A.
LDP
다중-수신기 장치
LDP는 다중-수신기 장치이다. GNSS 수신기는 위치 추정에 명목상 사용된다. (송수신기의 일부일 수도 있는) 프록시 수신기는 지상 비콘으로부터의 신호 정보 수집에 사용된다. 소프트웨어 정의 무선(Software Defined Radio (SDR))은 다수의 수신기들을 에뮬레이트하고 GNSS 및 지상 네트워크들을 샘플링하는데 사용될 수 있다. 성능 향상을 위해, 2 이상의 수신기들이 동시 발생하는 GNSS와 다수의 지상 비콘 샘플링을 동시에 허용하는데 사용될 수 있다.
비콘
비콘은 미리 정해진 방식에 따라 식별 정보를 포함하는 데이터를 송신하는 확립된 주파수 또는 주파수 대역을 사용하는 무선 송신기이다. 비콘에 의한 디지털 데이터 브로드캐스트의 사용은 비콘 및 그의 네트워크의 식별을 허용한다. 네트워크 타이밍은 비콘에 의해 송신된 프레임들(파일럿 채널 또는 동기화 채널)로부터 발견된다. 비콘 송신의 예시는 셀룰러 네트워크의 브로드캐스트 제어 채널, 및 IEEE 802.11 네트워크의 비콘 프레임을 포함하며, 비콘 식별자의 예시는 CDMA 및 UMTS 셀룰러 네트워크에서의 셀-ID, GSM 셀룰러 네트워크에서의 셀-글로벌-식별자(Cell-Global-Identifier (CGI)), 및 IEEE 802.11 무선 로컬 영역 네트워크에서의 기지국 식별자(Base Station Identifier (BSSID))를 포함한다.
수동
비콘
전력 레벨 및 근접성
LDP는 주기적 샘플링 이벤트 동안에 인접 비콘들의 신호 세기를 측정함으로써 고정밀 GNSS 위치 추정치를 위한 프록시로서 비콘을 수동적으로 사용할 수 있다. GNSS 수신기 및 지상 비콘 수신기 모두가 동시에 정보를 수집하기 때문에, 프록시 비콘의 송신 전력의 측정이 취해져서 최종 GNSS 위치 고정시에 기록된 비콘의 송신 전력과 비교될 수 있다. 기록된 비콘 전력을 사용하여 설정된 임계치 세트가 LDP에 의해 확립되어, 프록시 비콘을 향하거나 그로부터 멀어지는 모션이 후속 샘플링 기간 동안 검출될 수 있다.
도 1은 위성 신호전송을 위한 프록시 대체로서의 로컬 지상 비콘(이 예시에서, WiFi (IEEE 802.11) 노드와 같은 근거리 무선 로컬 영역 네트워크(WLAN) 액세스 포인트) 사용을 예시한다. 도 1에서, 모바일 장치(101)는 위치 결정을 가능하게 하기 위한 미손상 무선 브로드캐스트(111)를 갖는 GNSS 위성군(108)과 함께 빌딩(107) 외부에 도시된다. 이 예시에서, 위성군(108) 중에 빌딩(107)에 의해 차단된 내비게이션 무선 브로드캐스트 신호(110)를 갖는 하나의 단일 위성(109)이 도시된다. 빌딩(107) 외부의 모바일 장치(101)의 수신기에 의해 검출될 수 있는 브로드캐스트 신호(106)를 갖는 WLAN 노드(105)가 빌딩 내부에 있다.
빌딩(107) 내부의 위치(104)로 이동(103)한 후의 동일한 모바일 장치(101)가 도시된다. GNSS 위성(108)의 브로드캐스트 신호들(111 및 109)이 현재 빌딩에 의해 계속 차단되고 있지만, 모바일 장치(101)는 WLAN 노드(108)로부터 동일한 브로드캐스트(109)를 여전히 검출할 수 있다. 브로드캐스트 신호(111 또는 110)를 갖는 GNSS 위성군(108)의 각각의 멤버들이 계속 검출될 수도 있지만, 4개 미만의 위성 브로드캐스트는 GNSS 기반 위치 추정의 계산에 불충분하다. 그러나, 식별가능 로컬 브로드캐스트 신호(106)가 여전히 검출될 수 있기 때문에, 최종 GNSS 발견 위치 추정은 프록시 비콘 송신(106)이 검출될 수 있는 한 유효한 것으로 간주될 수 있다.
도 2a는 지상 비콘을 프록시로 사용하여 이전의 GNSS 획득 위치에 대한 현재 위치의 유효성을 결정하는 동작 단계들을 상세히 설명한다.
GNSS 수신기 서브시스템은 제1 유효 GNSS 위치를 발견해야 한다(201). 이 위치는 위도, 경도, 고도, 타이밍, 및 선택적으로 속도까지 포함한다. 거의 동시에, 비콘 수신기 서브시스템은 무선 비콘들을 미리 정해진 전송 대역에서 검출하고 식별한다(202). 비콘에 대한 정보는 송신기 식별을 포함하며, 수신 전력, 수신기 타이밍, 또는 다른 신호 품질 측정을 포함할 수 있다. 제1 GNSS 위치 및 제1 비콘 리스트가 프로세서 서브시스템에 전달되어 로컬로 저장된다(203). 발견된 제1 GNSS 위치가 유효하기 때문에, GNSS 발견 정보는 위치 수용 애플리케이션(미도시)에 전달된다. 일단, GNSS 수신기 서브시스템이 제1 GNSS 위치를 전달하면, GNSS 수신기 시스템은 다음 요구되는 업데이트까지 저전력 슬립 모드(sleep mode)에 진입하는 것이 허용된다(204). 요구되는 업데이트의 빈도는 프로세서 서브시스템을 통해 위치 수용 애플리케이션에 의해 설정된다. 다음 요구되는 업데이트까지 비콘 수신기 서브시스템 또한 저전력 슬립 모드에 진입하는 것이 허용된다(205). GNSS 수신기 서브시스템이 유효 GNSS 위치 고정을 생성하는 동안, 비콘 수신기 서브시스템은 GNSS 수신기 서브시스템과 동시에 활성화된다.
GNSS 수신기 서브시스템이 유효 GNSS 위치 고정을 생성하지 못하면(206), 이에 응답하여, 비콘 수신기 서브시스템은 검출가능하고 식별가능한 비콘들의 현재 리스트를 동시에 생성한다(207). 이 경우, 제어기는 최종 유효 GNSS 고정과 시간적으로 관련된 이전 비콘 리스트를 현재 비콘 리스트와 비교한다.
예시적인 경우에, 현재 및 이전 비콘 리스트 모두에서 제한-범위 비콘(IEEE-802.11 WiFi 노드 등)이 존재하면, 제어기가 오차범위가 증가한 최종 유효 GNSS 위치를 재사용할 수 있다. 오차 범위는 비콘의 타입(예를 들어, 802.11 버전 "b" 및 "g" 액세스 포인트들은 일반적으로 최대 100미터의 범위를 가지며, "n" 액세스 포인트는 200미터까지의 확장된 범위를 갖는다. 블루투스(Bluetooth), RFID, 및 초광대역(ultra-wideband (UWB))을 사용하는 다른 WLAN 또는 비콘 기술들은 훨씬 더 짧은 몇 10 미터의 범위를 가질 수 있다) 또는 주파수 대역(신호 주파수가 증가하면, 범위는 감소한다)에 따라 변할 수 있다.
제어기가 비콘 리스트들의 조사에 기초하여 최종 유효 GNSS 고정이 계속 유효하다고 결정한다면, 제어기는 GNSS 수신기 서브시스템을 스위치 오프하고(210), 트리거링 조건들이 충족된 이후의 시간에 GNSS 위치확인을 재활성화하고 재시도하도록 트리거링 조건들을 설정할 것이다. 제어기는 비콘 수신기 서브시스템에게 저전력 상태로 전이하라고 명령한다(211).
도 2b는 트리거링 이벤트 후에 GNSS 위치확인의 성공적인 재개를 설명하고 있다. 이 시나리오에서, GNSS 수신기 서브시스템은 전력이 차단된 상태로 시작한다(210). 제어기는 GNSS 재시도 트리거링 이벤트를 검출한다. 이들 GNSS 재시도 트리거링 이벤트들은 이 문서의 이후 섹션에서 상세히 설명된다. GNSS 재시도 이벤트의 주요한 예시에서, 도 2b에 도시된 바와 같이, 비콘 수신기 서브시스템은 제어기로 송신되는 새로운 비콘 리스트를 생성한다(211). 제어기는 이전에 선택된 프록시 비콘이 새로운 비콘 리스트에 누락되었는지를 검출한다. 선택된 프록시 비콘(들)이 계속되는 위치 유효성을 보증하는데 더 이상 받아들여질 수 없기 때문에, GNSS 재활성 및 재시도가 정당화된다(212).
GNSS 재활성화 및 재시도(213)는 명목상, 제어기가 저장된 연감(Almanac) 및 일지(Ephemeris) 데이터뿐 아니라 현재 시간 및 최종 유효 위치를 GNSS 수신기 서브시스템에 업로드하는 핫 스타트(hot start)이다. 이 예시에서, 핫 스타트 후에, GNS 수신기는 위치결정을 성공적으로 수행하고(201), GNSS 생성 정보를 제어기에 전달하여 저장하고 애플리케이션에 전달한다(214). 제어기는 비콘 수신기 서브시스템에게 비콘에 관해 재스캔하라고 명령한다(213). 비콘 수신기 서브시스템은 저전력 슬립 모드로 들어가기 전에 검출가능하고 식별가능한 비콘들에 관해 스캔하고, 제어기에게 결정된 리스트를 보고한다(211). 제어기는 새로 고친 비콘 리스트 및 시간 스탬프를 저장한다(216).
도 2c는 트리거링 이벤트 후에 GNSS 위치확인의 성공적이지 못한 재개를 설명하고 있다. 이 시나리오에서, GNSS 수신기 서브시스템은 전력이 차단된 상태로 시작한다(210). 제어기는 GNSS 재시도 트리거링 이벤트를 검출한다. 이러한 예시적인 경우에, 도 2c에 도시된 바와 같이, 비콘 수신기 서브시스템은 제어기로 송신되는 새로운 비콘 리스트를 생성한다(211). 새로운 비콘 리스트에서 이전에 결정된 프록시 비콘의 부재는 제어기가 GNSS 서브시스템을 재시도하도록 트리거링한다(212).
GNSS 재활성화 및 재시도(213)는 명목상, 제어기가 저장된 연감 및 일지 데이터뿐 아니라 현재 시간 및 최종 유효 위치를 GNSS 수신기 서브시스템에 업로드하는 핫 스타트이다. 이 예시에서, 핫 스타트 후에, GNS 수신기는 GNSS 위치 고정을 생성하는데 실패한다(215). 새로운 GNSS 위치 생성에 대한 이러한 실패는 제어기로 전달되고, 그 후 제어기는 현재 위치가 공지되지 않거나 신뢰할 수 없다는 것을 애플리케이션에 신호 전송한다(216).
도 3은 위치확인 장치 플랫폼(LDP)의 기능 요소들을 도시한다. GNSS 수신기 서브시스템(GRS)(301)은 데이터 버스(308)를 통해 마이크로프로세서-기반 제어기(302)에 연결된 저-전력 상업용 GPS 칩셋이다.
비콘 수신기 서브시스템(BRS)(304)은 직렬 주변 장치 인터페이스(SPI)와 같은 데이터 버스(308)를 통해 마이크로프로세서-기반 제어기(302)에 연결된 저-전력 상업용 WLAN 또는 무선 수신기이다. 기능적으로, GRS(301) 및 BRS(304)는 별도의 수신기들이지만, 안테나 및 회로망을 공유할 수 있다.
클럭(305)은 상업적으로 이용가능한 클럭 모듈이다. 트리거링 이벤트, 단위 비용, 및 전력 소비에 대한 설계자의 선택에 따라, 클럭은 온도 보상수정 발진기(Temperature Compensated Crystal Oscillator)와 같은 매우 안정적인 클럭으로부터 덜 안정적이지만 비싸지 않은 수정 진동자 기반 실시간 클럭(quartz crystal based real time clock)까지의 범위일 수 있다. 클럭(305)은 이용가능한 경우 GRS(301)로부터의 GNSS 도출 타이밍 신호를 사용하여 제어기에 의해 설정 및 규율될 것이다. 클럭(305)은 또한 GRS(301), BRS(304), 및 제어기(302)를 위한 저전력 슬립 구간을 결정하는데 사용될 수 있다. 클럭 모듈(305)이 그렇게 선택되었다면, 기준 GNSS 시스템을 GRS(301)에 제공하여 더 빠른 고정 시간(time-to-fix)이 가능하도록 할 수 있다.
제어기(302)는 LDP의 결정 로직에 계산 플랫폼을 제공할 뿐 아니라 서브 시스템들 사이의 데이터 전송을 처리하는 저전력 상업용 마이크로프로세서이다. 대안적으로, 제어기(302)는 보조 서브시스템(306)의 일부로서 공급되는 프로세서에서 실행되는 소프트웨어 프로그램으로서 구현될 수도 있다.
로컬 메모리(303)는 BRS(304)에 의해 결정되는 비콘 정보뿐 아니라 GRS(301)로부터의 연감 및 일지 데이터도 저장하는데 사용된다.
보조 서브시스템(306)이 포함되어, LDP가 그 일부인 더 큰 장치를 나타낸다. 보조 서브시스템(306)은 마이크로프로세서, 휘발성 및 비-휘발성 메모리, 소프트웨어 애플리케이션, 배터리 모니터, 디스플레이, 및 공급된 위치 정보를 사용하거나 조작하는 입력을 포함할 수 있다.
셀룰러 전화 시스템과 같은 광역 통신 네트워크로부터의 브로드캐스트는 프록시 비콘으로서 기능하는데 매우 적합하다. 매우 작은 기지국(펨토셀(Femto-cell))은 범위 및 전력에서 WLAN 노드들과 유사하다. 더 크고 더 넓은 영역의 기지국들은 고출력으로 송신하여 빌딩 내의 서비스를가능하게 한다. 셀룰러 브로드캐스트들은 특정 대역폭 및 변조방식을 사용하여 특정 대역에서 표준화되어 있다. 셀룰러 브로드캐스트들은 셀들 또는 셀의 섹터들로부터의 송신의 판별을 가능하게 하는 식별자들(셀 글로벌 아이덴티티(GSM), 셀 아이덴티티(UMTS), 기지국ID(CDMA2000))을 포함한다. 도착 기법들의 상대적 시간차 및 상대 전력의 사용은 셀룰러 송신기 위치 또는 전력에 대해 알고 있을 필요 없이 위치 이동 또는 변경의 검출을 가능하게 한다.
도 4는 GNSS 발견 위치 추정을 위한 프록시로서 광역 셀룰러 네트워크에 의해 제공되는 비콘 신호들을 사용하는 것을 도시한다. 모바일 장치(401)는 빌딩(403) 외부의 지점(402)에 먼저 위치한다. GNSS 위성군(413)으로부터의 브로드캐스트 무선 신호들(414)은 제1 지점(402)에서 성공적으로 사용되어 유효 위치, 속도, 고도, 및 시각 추정치를 생성할 수 있다. 셀룰러 시스템으로부터의 브로드캐스트 신호들(405, 406, 407, 및 408)이 또한 제1 지점(402)에서 이용될 수 있다. 소정의 시간에, 모바일 장치(401)는 빌딩(403) 내의 제2 지점(404)으로 이동한다(415). GNSS 위성군(413)으로부터의 브로드캐스트 신호들(414)은 주변 구조(403)에 의해 현재 차단되어 있다. 셀룰러 네트워크(405, 406, 407, 및 408)로부터의 고출력 브로드캐스트 신호들(409, 410, 411, 및 412)은 성공적으로 빌딩 내부로 침투하여 모바일 장치(401)가 브로드캐스트 신호들(409, 410, 411, 및 412)을 프록시로서 사용하게 한다.
이 예시에서, 프록시는 브로드캐스트 신호들(409, 410, 411, 및 412) 사이의 상대적인 시간차에 의존한다. 셀룰러 네트워크 송신기들의 위치는 알려져 있지 않기 때문에, 위치는 상대적인 타이밍 차이로부터 계산될 수 없지만, 유효 GNSS 위치 고정이 여전히 유효한 것으로 간주될 수 있다면, 제1 위치(402) 및 제2 위치(404)에서 수신된 것들 사이의 상대적인 타이밍 차이는 대략적인 위치 변경을 결정하는데 사용될 수 있다.
도 5는 GNSS 발견 위치 추정을 위한 프록시로서 광역 셀룰러 네트워크에 의해 제공되는 비콘 신호들을 사용하는 것을 도시한다. 모바일 장치(501)는 빌딩(505) 외부의 지점(502)에 먼저 위치한다. GNSS 위성군(519)으로부터의 브로드캐스트 무선 신호들(520)은 제1 지점(502)에서 성공적으로 사용되어 유효 위치, 속도, 고도, 및 시각 추정치를 생성할 수 있다. 셀룰러 시스템으로부터의 브로드캐스트 신호들(506, 507, 508, 및 509)이 제1 지점(502)에서 이용될 수 있다. 소정의 시간에, 모바일 장치(501)는 빌딩(505) 내의 제2 지점(504)으로 이동한다(503). GNSS 위성군(514)으로부터의 브로드캐스트 신호들(515)은 주변 구조(505)에 의해 현재 차단되고 있다. 셀룰러 네트워크(506, 507, 508, 및 509)로부터의 고출력 브로드캐스트 신호들(510, 511, 512, 및 513)은 성공적으로 빌딩 내부로 침투하여 모바일 장치(401)가 브로드캐스트 신호들(510, 511, 512, 및 513)을 프록시로서 사용하게 한다.
이 예시에서, 프록시는 브로드캐스트 신호들(510, 511, 512, 및 513) 사이의 상대적인 전력차에 의존한다. 셀룰러 네트워크 송신기들의 위치 및 송신 전력은 알려져 있지 않기 때문에, 위치는 전력 차이로부터 계산될 수 없지만, 제1 위치(502)로부터의 유효 GNSS 위치 고정이 여전히 유효한 것으로 간주될 수 있다면, 제1 위치(502) 및 제2 위치(504)에서 수신된 것들 사이의 상대적인 전력 차이는 대략적인 위치 변경을 결정하는데 사용될 수 있다. 이들 상대적인 전력 차이는 일련의 쌍곡선(515, 516, 517, 및 518)으로서 도시된다.
B.
GNSS
재시도
트리거링
이벤트:
프록시
비콘
트리거
손실(
Loss
of
Proxy
Beacon
Trigger
)
브로드캐스트 신호를 최종 공지 유효 GNSS 위치를 위한 프록시로서 사용하는 경우, 프록시가 더 이상 검출되지 않는다면, GNSS 재시도가 개시된다.
핫 스타트
트리거의
임박 손실(
Impending
loss
of
hot
start
Trigger
)
GNSS 수신기(이 예시에서, GPS 수신기)는 위성 브로드캐스트로부터 연감 및 일지 데이터를 수집한다. GPS 연감은 모든 활동 GPS 위성들에 관한 궤도 파라미터들을 포함하며, 모든 위성에 의해 브로드캐스트된다. 정확한 GPS 연감 데이터에 대한 필요는 긴급한 것이 아니어서, GPS 연감 데이터는 몇 달의 기간 동안 유효한 것으로 간주될 수 있다.
30초마다 각각의 GPS 위성에 의해 브로드캐스트된 매우 정확한 궤도 및 클럭 보정인 일지 데이터는 일반적으로 각각의 개별적인 위성 브로드캐스트로부터 수집된다. 일지 데이터는 시간에 민감하여, 자주 새로 고쳐져야 하며(예를 들면, 30분 미만) 그렇지 않으면 정확한 위치 추정이 불가능하게 될 것이다.
위치 추정을 계산하기 전에 GNSS 수신기가 새로 고친 연감 및 일지를 수집해야 하는 '콜드 스타트(cold start)' 및 GNSS 수신기가 새로 고친 일지 데이터를 수집해야 하는 '웜 스타트(warm start)'를 방지하기 위해, LDP는 GNSS 수신기 서브시스템을 주기적으로 활성화하여 새로운 GNSS 위치 추정을 시도할 것이다.
위성 새로 고침 트리거(
Satellite
Freshness
Trigger
)
일지 데이터가 각각의 이용가능한 위성으로부터 수집되는 경우, 시간 스탬프가 적용된다. 시간, 위성 ID, 및 일지 데이터의 데이터베이스 엔트리는 LDP 내에서 생성된다. 일지 데이터 나이가 한도(명목상 30분)를 넘으면, 그 위성에 관한 데이터는 오래된 것으로 표시된다. 새로운 GNSS 위치에 관한 트리거는 데이터베이스 엔트리가 오래된 것으로 표시되기 전 위성 신호 수집 및 위치 추정을 시도하도록 설정된다. 트리거링 방법은 초기 콜드-스타트 후에 새롭게 이용가능한 위성들에 대해만 GNSS 수신기에 의해 위성 일지 데이터가 수집되거나 데이터베이스 엔트리에 도달하기 위한 가드 시간(명목상 15분)을 초과한 경우의 방식에 의존한다.
연감 데이터에 기반하여 시간에 따른 위성 이용가능성의 예측 모델은 위성이 수평면 위로 이동함에 따라 데이터베이스 일지 엔트리를 무효화하는데 사용될 수도 있다. 위성이 이용될 수 없다고 예측하기 전에, 이러한 예측 거동은 위치확인을 트리거링할 수 있다.
원-샷 타이머 초과 트리거(
One
-
shot
Timer
Exceeded
Trigger
)
GNSS 프록시 위치확인 유효성 기법은 임의의 유효성 타이머(validity timer)를 지원할 수 있다. 프록시가 손실되지 않은 경우에도, GNSS 위치결정 재시도가 시도될 것이다. 이는 재설정가능 타이머(resettable timer)이다.
프로그래시브
GPS
재시도 (정기) 트리거(
Progressive
GPS
retry
(
timed
) Trigger)
GNSS 프록시 위치확인 유효성 기법은 임의의 또는 핫 스타트 유효성 타이머를 지원할 수 있다. 프록시가 손실되지 않은 경우에도, GNSS 위치결정 재시도가 시도될 것이다. 각각의 실패에서, 재시도들 간의 간격이 감소될 것이다.
드리프트
트리거
(
Drift
Trigger
)
프록시 비콘 전력이 임계치에 대해 변하는 경우에(상승/하강), 또는 수신된 상대 비콘 전력 또는 신호 타이밍의 변경로 인해, GNSS 재시도가 요구될 수 있다.
인접
트리거
(
Neighbors
Trigger
)
프록시 비콘 리스트가 변하는 경우에 GNSS 재시도가 요구될 수 있다. 이 기법은 WLAN 노드를 프록시 비콘으로서 사용할 때 특히 유용하다.
최종
트리거
(
Last
Gasp
Trigger
)
장치 배터리 모니터가 전력이 낮게 작동된다고 신호를 전송한다면 GNSS 재시도가 요구될 수 있다. 이러한 트리거는 영구적인 비-휘발성 메모리를 갖는 위치-인식 태그에 특히 유용하다.
C. 대체
실시예
- 통신 송수신기를 갖는
LDP
장치
등록 재시도
LDP가 비콘 수신기 서브시스템 대신에 무선 통신 송수신기를 장착하고 있는 경우, 확장된 GNSS 유효성의 결정을 위한 프록시 기법은 비콘 아이덴티티, 타이밍, 및 수신 전력 이외의 무선 통신 네트워크(WCN) 정보를 사용하여 수행될 수 있다. 특히, 수신 신호 세기(received signal strength (RSS)), 타이밍 어드밴스(Timing Advance (TA)), 왕복 시간(Round-Trip-Time (RTT)), 또는 왕복 지연(Round-Trip-Delay (RTD))은 WCN에 등록된 LDP에 이용가능하게 된다. LDP가 순응(conforming) 셀룰러 장치가 아니기 때문에, LDP는 셀룰러 네트워크와의 연결을 재시도하여 다수의 비콘들로부터 타이밍 및 신호 데이터를 수집할 수 있다.
비콘
타이밍의 능동적 결정
무선 통신 송수신기를 구비한 LDP는 무선 통신 네트워크(WCN)와의 능동 세션을 생성할 능력이 있다. 능동 세션은, LDP에게 WCN 제공 서비스 및 대응하는 가정용 서버에 가입하도록 요구하는, WCN을 통한 데이터 경로를 생성할 필요가 없다. 오히려, LDP는 실패한 세션 개시를 사용하여 브로드캐스트 비콘에 이용할 수 없는 WCN으로부터 정보를 수신할 수 있다.
이러한 추가 정보는 왕복 시간으로부터 추정되는 타이밍 어드밴스(TA) 또는 왕복 시간 자체(RTT), 수신 신호 세기 지시자(received signal strength indicator (RSSI)), 인접 비콘들의 주파수 또는 식별자들에 대한 상세 설명을 포함할 수 있다. 타이밍 및 신호 전력 정보가 모션 결정에 직접 사용될 수 있는 반면에, 인접 비콘 정보의 사용은 LDP 프록시 수신기를 재튜닝하여 각각의 비콘에 관한 타이밍 및/또는 전력 측정치를 발견하는데 사용될 수 있다. 추가 타이밍 및 전력 정보는 또한 최종 GNSS 획득 위치를 무효화할 모션을 검출하는데 사용될 것이다.
D. 결론
본 발명의 진정한 범위는 여기에 개시된 바람직한 실시예들로 제한되지 않는다. 많은 경우에, 여기에 개시된 구현예(즉, 기능 요소)의 배치는 필수 요구사항이 아니라 단순히 설계자의 선호도이다. 또한, 본 명세서를 읽고 나면 앞서 설명한 예시적인 실시예의 변경예 및 변형예는 당업자에게 명백할 수 있다. 따라서, 명시적으로 제한될 수 있다고 한 경우를 제외하고, 다음의 청구항들의 보호 범위는 앞서 설명한 특정 실시예들로 제한하려는 것은 아니다.
Claims (68)
- 모바일 장치로서,
글로벌 내비게이션 위성 시스템(GNSS) 신호들을 수신하도록 구성된 GNSS 수신기;
지상 비콘 신호를 수신하도록 구성된 제2 수신기; 및
상기 GNSS 수신기 및 상기 제2 수신기와 동작적으로(operatively) 결합된 제어기
를 포함하고,
상기 제어기는 신호 차단으로 인해 상기 GNSS 신호들을 이용할 수 없는 경우를 검출하고, 상기 검출에 대한 응답으로서, 수신된 지상 비콘 신호를 사용하여 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하도록 구성된 모바일 장치. - 제1항에 있어서,
상기 제어기는 상기 제2 수신기를 이용하여 상기 지상 비콘으로부터 네트워크 파라미터들을 획득하고, 최종 공지된 GNSS 도출 위치가 여전히 유효한지 여부를 결정하도록 구성된 모바일 장치. - 제2항에 있어서,
상기 네트워크 파라미터들은 비콘 전력, 비콘 식별자, 타이밍 어드밴스, 및 왕복 시간 중 적어도 하나를 포함하는 모바일 장치. - 제1항에 있어서,
상기 제어기는 상기 GNSS 신호들을 이용할 수 없다고 검출한 것에 응답하여 GNSS 탐색들을 유예하고 상기 GNSS 수신기의 전력을 차단하도록 또한 구성된 모바일 장치. - 제1항에 있어서,
상기 모바일 장치는 모바일 전화기에 통합되어 있는 모바일 장치. - 제1항에 있어서,
상기 모바일 장치는 개인용 또는 자동차용 내비게이션 시스템에 통합되어 있는 모바일 장치. - 제1항에 있어서,
상기 모바일 장치는 태그 장치에 통합되어 있는 모바일 장치. - 제1항에 있어서,
상기 모바일 장치는 배터리로 전력을 공급받는 모바일 장치. - 제1항에 있어서,
상기 GNSS 수신기 및 제2 수신기는 소프트웨어 정의 무선(SDR)으로 구현되는 모바일 장치. - 제1항에 있어서,
상기 모바일 장치는 수신된 비콘 신호들을 통해 데이터를 수신하도록 구성되고, 상기 수신된 데이터는 비콘 및 그의 네트워크에 대한 식별 정보를 포함하는 모바일 장치. - 제10항에 있어서,
상기 모바일 장치는 상기 비콘에 의해 송신된 프레임들로부터 네트워크 타이밍을 결정하도록 또한 구성된 모바일 장치. - 제11항에 있어서,
상기 모바일 장치는 상기 비콘으로부터 파일럿 채널 신호 및 동기화 채널 신호 중 적어도 하나를 수신하도록 또한 구성된 모바일 장치. - 제11항에 있어서,
상기 모바일 장치는 셀룰러 네트워크의 브로드캐스트 제어 채널 및 IEEE 802.11 네트워크의 비콘 프레임 중 적어도 하나를 포함하는 비콘 송신들을 수신하도록 또한 구성된 모바일 장치. - 제11항에 있어서,
상기 모바일 장치는 CDMA 또는 UMTS 셀룰러 네트워크에서의 셀-ID, GSM 셀룰러 네트워크에서의 셀-글로벌-식별자(CGI) 및 IEEE 802.11 무선 로컬 영역 네트워크에서의 기지국 식별자 중 적어도 하나를 포함하는 비콘 식별자들을 수신하도록 또한 구성된 모바일 장치. - 제1항에 있어서,
상기 모바일 장치는 주기적인 샘플링 이벤트들 중에 인접 비콘들로부터 수신된 신호들의 세기를 측정하고 비교함으로써 고정밀 GNSS 위치 추정치를 위한 프록시로서 다수의 비콘들로부터의 수신된 비콘 신호들을 수동적으로 사용하도록 또한 구성된 모바일 장치. - 제1항에 있어서,
상기 모바일 장치는,
상기 GNSS 수신기를 이용하여 위도, 경도, 고도, 및 타이밍을 포함하는 제1 유효 GNSS 위치를 발견하는 단계;
동시에, 상기 제2 수신기를 이용하여 미리 정해진 전송 대역들에서 하나 이상의 무선 비콘들을 검출하고 식별하는 단계;
상기 제1 유효 GNSS 위치 및 비콘들의 제1 리스트를 상기 모바일 장치 내에 로컬로 저장하는 단계;
상기 GNSS 위치 정보를 위치 수용(location-consuming) 애플리케이션에 전달하는 단계;
상기 위치 수용 애플리케이션에 의해 결정된 바와 같은 다음 요구되는 업데이트 시간까지 GNSS 수신기가 저전력 슬립 모드로 진입하는 단계;
상기 다음 요구되는 업데이트 시간까지 상기 제2 수신기가 저전력 슬립 모드로 진입하는 단계;
상기 GNSS 수신기가 유효 GNSS 위치 고정을 생성하지 못했다고 결정하면, 상기 제2 수신기는 검출가능하고 식별가능한 비콘들의 현재 리스트를 생성하는 단계;
상기 현재 비콘 리스트를 상기 최종 유효 GNSS 고정과 시간적으로 관련된 이전 비콘 리스트와 비교하는 단계; 및
상기 이전 비콘 리스트와 상기 현재 비콘 리스트 모두에 제한된 범위의 비콘이 존재한다고 결정하면, 상기 모바일 장치는 상기 최종 유효 GNSS 위치를 재사용하며, 상기 GNSS 수신기를 스위치 오프하고 트리거링 조건들을 설정하여 상기 트리거링 조건들을 충족시키는 더 늦은 시간에 GNSS 위치확인을 재활성화하고 재시도하는 단계
를 포함하는 프로세스를 수행함으로써 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하도록 또한 구성된 모바일 장치. - 제16항에 있어서,
상기 모바일 장치는,
GNSS 재시도 트리거링 이벤트를 검출하는 단계;
상기 제어기가 현재 시간, 최종 유효 위치, 저장된 연감 및 일지 데이터(almanac and ephemeris data)를 상기 GNSS 수신기에 업로드하는 단계;
상기 GNSS 수신기가 위치결정을 성공적으로 수행하고, GNSS 생성 정보가 상기 위치 수용 애플리케이션에 저장되고 전달되는 단계;
상기 제2 수신기는 검출가능하고 식별가능한 비콘들에 대해 스캔하고 상기 제어기에 리스트를 보고하고 상기 저전력 슬립 모드로 들어가는 단계; 및
새로 고친(refreshed) 비콘 리스트 및 시간 스탬프를 저장하는 단계
를 포함하는 프로세스를 수행함으로써 트리거링 이벤트 후 상기 장치가 GNSS 위치확인을 재개하도록 또한 구성된 모바일 장치. - 제1항에 있어서,
상기 모바일 장치는, 상기 GNSS 수신기 및 상기 제2 수신기 모두를 사용하여 각각의 수신기로부터 동시에 정보를 수집하고, 상기 비콘의 송신 전력을 측정하고 그 측정을 이전의 GNSS 위치 고정시에 기록된 상기 비콘의 송신 전력과 비교하며, 상기 비교에 기반하여 상기 비콘을 향하거나 상기 비콘으로부터 멀어지는 모션을 검출하는 모바일 장치. - 제1항에 있어서,
상기 모바일 장치는,
상기 GNSS 수신기를 이용하여 위도, 경도, 고도, 및 타이밍을 포함하는 제1 유효 GNSS 위치를 발견하는 단계;
동시에, 상기 제2 수신기를 이용하여 미리 정해진 전송 대역들에서 하나 이상의 무선 비콘들을 검출하고 식별하는 단계 - 상기 하나 이상의 무선 비콘들은 셀룰러 네트워크 송신기들로부터의 브로드캐스트 신호들을 포함함 -;
상기 GNSS 위치 정보를 위치 수용 애플리케이션에 전달하는 단계;
상기 위치 수용 애플리케이션에 의해 결정된 바와 같은 다음 요구되는 업데이트 시간까지 상기 GNSS 수신기가 저전력 슬립 모드로 진입하는 단계;
상기 다음 요구되는 업데이트 시간까지 상기 제2 수신기가 저전력 슬립 모드로 진입하는 단계;
상기 GNSS 수신기가 유효 GNSS 위치 고정을 생성하지 못했다고 결정하면, 상기 제2 수신기는 검출가능하고 식별가능한 비콘들의 현재 리스트를 생성하는 단계;
상기 현재 비콘 리스트를 상기 최종 유효 GNSS 고정과 시간적으로 관련된 이전 비콘 리스트와 비교하고, 비콘 신호들 간의 상대적 타이밍 차이 및 전력 차이 중 하나를 사용하여 근사치의 위치 변경을 결정하는 단계; 및
상기 근사치의 위치 변경에 기반하여 상기 최종 유효 GNSS 위치의 유효성을 결정하는 단계
를 포함하는 프로세스를 수행함으로써 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하도록 또한 구성된 모바일 장치. - 제1항에 있어서,
상기 제2 수신기는 통신 송수신기로 구현되는 모바일 장치. - 제20항에 있어서,
상기 모바일 장치는 다수의 비콘들로부터 타이밍 및 신호 데이터를 수집하기 위해 상기 통신 송수신기를 이용하여 셀룰러 네트워크와의 접속을 재시도하도록 구성된 모바일 장치. - 제20항에 있어서,
상기 모바일 장치는 상기 통신 송수신기를 이용하여 셀룰러 네트워크와의 능동 세션을 생성하고 실패한 세션 개시를 사용하여 브로드캐스트 비콘에 이용될 수 없는 네트워크로부터 추가 정보를 수신하도록 구성된 모바일 장치. - 제22항에 있어서,
상기 추가 정보는 타이밍 어드밴스(TA), 수신 신호 세기 지시자(RSSI), 및 인접 비콘들의 주파수들 또는 식별자들에 대한 상세 사항 중 적어도 하나를 포함하는 모바일 장치. - 모바일 장치의 위치를 결정하는데 사용되는 방법으로서,
상기 모바일 장치와 관련된 GNSS 수신기를 이용하여 GNSS 신호들을 수신하는 단계;
상기 모바일 장치와 관련된 제2 수신기를 이용하여 지상 비콘 신호를 수신하는 단계; 및
상기 모바일 장치와 관련된 제어기를 이용하여 신호 차단으로 인해 상기 GNSS 신호들을 이용할 수 없는 경우를 검출하고, 상기 검출에 대한 응답으로서, 수신된 지상 비콘 신호를 이용하여 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하는 단계
를 포함하는 방법. - 제24항에 있어서,
상기 제2 수신기를 이용하여 상기 지상 비콘으로부터 네트워크 파라미터들을 획득하고, 최종 공지된 GNSS 도출 위치가 여전히 유효한지 여부를 결정하는 단계를 더 포함하는 방법. - 제25항에 있어서,
상기 네트워크 파라미터들은 비콘 전력, 비콘 식별자, 타이밍 어드밴스, 및 왕복 시간 중 적어도 하나를 포함하는 방법. - 제24항에 있어서,
상기 GNSS 신호들을 이용할 수 없다고 검출하는 것에 응답하여 GNSS 탐색들을 유예하고 상기 GNSS 수신기의 전력을 차단하는 단계를 더 포함하는 방법. - 제24항에 있어서,
상기 모바일 장치는 모바일 전화기에 통합되어 있는 방법. - 제24항에 있어서,
상기 모바일 장치는 개인용 또는 자동차용 내비게이션 시스템에 통합되어 있는 방법. - 제24항에 있어서,
상기 모바일 장치는 태그 장치에 통합되어 있는 방법. - 제24항에 있어서,
상기 모바일 장치는 배터리로 전력을 공급받는 방법. - 제24항에 있어서,
상기 GNSS 수신기 및 제2 수신기는 SDR로 구현되는 방법. - 제24항에 있어서,
수신된 비콘 신호들을 통해 데이터를 수신하는 단계를 더 포함하고, 상기 수신된 데이터는 비콘 및 그의 네트워크에 대한 식별 정보를 포함하는 방법. - 제33항에 있어서,
상기 비콘에 의해 송신된 프레임들로부터 네트워크 타이밍을 결정하는 단계를 더 포함하는 방법. - 제34항에 있어서,
상기 비콘으로부터 파일럿 채널 신호 및 동기화 채널 신호 중 적어도 하나를 수신하는 단계를 더 포함하는 방법. - 제34항에 있어서,
셀룰러 네트워크의 브로드캐스트 제어 채널 및 IEEE 802.11 네트워크의 비콘 프레임 중 적어도 하나를 포함하는 비콘 송신을 수신하는 단계를 더 포함하는 방법. - 제34항에 있어서,
CDMA 또는 UMTS 셀룰러 네트워크에서의 셀-ID, GSM 셀룰러 네트워크에서의 셀-글로벌-식별자(CGI) 및 IEEE 802.11 무선 로컬 영역 네트워크에서의 기지국 식별자 중 적어도 하나를 포함하는 비콘 식별자들을 수신하는 단계를 더 포함하는 방법. - 제24항에 있어서,
주기적인 샘플링 이벤트들 중에 인접 비콘들로부터 수신된 신호들의 세기를 측정하고 비교함으로써 고정밀 GNSS 위치 추정치를 위한 프록시로서 다수의 비콘들로부터의 수신된 비콘 신호들을 수동적으로 사용하는 단계를 더 포함하는 방법. - 제24항에 있어서,
상기 GNSS 수신기를 이용하여 위도, 경도, 고도, 및 타이밍을 포함하는 제1 유효 GNSS 위치를 발견하는 단계;
동시에, 상기 제2 수신기를 이용하여 미리 정해진 전송 대역들에서 하나 이상의 무선 비콘들을 검출하고 식별하는 단계;
상기 제1 유효 GNSS 위치 및 비콘들의 제1 리스트를 상기 모바일 장치 내에 로컬로 저장하는 단계;
GNSS 위치 정보를 위치 수용 애플리케이션에 전달하는 단계;
상기 위치 수용 애플리케이션에 의해 결정된 바와 같은 다음 요구되는 업데이트 시간까지 상기 GNSS 수신기가 저전력 슬립 모드로 진입하는 단계;
상기 다음 요구되는 업데이트 시간까지 상기 제2 수신기가 저전력 슬립 모드로 진입하는 단계;
상기 GNSS 수신기가 유효 GNSS 위치 고정을 생성하지 못했다고 결정하면, 상기 제2 수신기는 검출가능하고 식별가능한 비콘들의 현재 리스트를 생성하는 단계;
상기 현재 비콘 리스트를 상기 최종 유효 GNSS 고정과 시간적으로 관련된 이전 비콘 리스트와 비교하는 단계;
이전 비콘 리스트와 현재 비콘 리스트 모두에 제한된 범위의 비콘이 존재한다고 결정하면, 상기 모바일 장치는 상기 최종 유효 GNSS 위치를 재사용하며, 상기 GNSS 수신기를 스위치 오프하고 트리거링 조건들을 설정하여 상기 트리거링 조건들을 충족시키는 더 늦은 시간에 GNSS 위치확인을 재활성화하고 재시도하는 단계
를 포함하는 프로세스를 수행하는 단계를 더 포함함으로써 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하는 방법. - 제39항에 있어서,
GNSS 트리거링 이벤트를 검출하는 단계;
상기 제어기가 현재 시간, 최종 유효 위치, 저장된 연감 및 일지 데이터를 상기 GNSS 수신기에 업로드하는 단계;
상기 GNSS 수신기가 위치결정을 성공적으로 수행하고, GNSS 생성 정보가 상기 위치 수용 애플리케이션에 저장되고 전달되는 단계;
상기 제2 수신기는 검출가능하고 식별가능한 비콘들에 대해 스캔하여 상기 제어기에 리스트를 보고하고 상기 저전력 슬립 모드로 들어가는 단계; 및
새로 고친 비콘 리스트 및 시간 스탬프를 저장하는 단계
를 포함하는 프로세스를 수행하는 단계를 더 포함함으로써 상기 장치가 상기 트리거링 이벤트 후 GNSS 위치확인을 재개하는 방법. - 제24항에 있어서,
상기 GNSS 수신기 및 제2 수신기 모두를 사용하여 각각의 수신기로부터 동시에 정보를 수집하고, 상기 비콘의 송신 전력을 측정하고 그 측정을 이전의 GNSS 위치 고정시에 기록된 상기 비콘의 송신 전력과 비교하며, 상기 비교에 기반하여 상기 비콘을 향하거나 상기 비콘으로부터 멀어지는 모션을 검출하는 단계를 더 포함하는 방법. - 제24항에 있어서,
다음의 단계를 포함하는 프로세스를 수행하는 단계를 더 포함함으로써, 상기 장치가 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하는 방법. - 제24항에 있어서,
상기 제2 수신기는 통신 송수신기로 구현되는 방법. - 제43항에 있어서,
다수의 비콘들로부터 타이밍 및 신호 데이터를 수집하기 위해 상기 통신 송수신기를 이용하여 셀룰러 네트워크와의 접속을 재시도하는 단계를 더 포함하는 방법. - 제43항에 있어서,
상기 통신 송수신기를 이용하여 셀룰러 네트워크와의 능동 세션을 생성하고 실패한 세션 개시를 사용하여 브로드캐스트 비콘에 이용될 수 없는 네트워크로부터 추가 정보를 수신하는 단계를 더 포함하는 방법. - 제45항에 있어서,
상기 추가 정보는 TA, RSSI, 및 인접 비콘들의 주파수들 또는 식별자들에 대한 상세 사항 중 적어도 하나를 포함하는 방법. - 모바일 장치의 위치를 결정하는데 사용되는 시스템으로서,
상기 모바일 장치와 관련된 GNSS 수신기를 이용하여 GNSS 신호들을 수신하는 수단;
상기 모바일 장치와 관련된 제2 수신기를 이용하여 지상 비콘 신호를 수신하는 수단; 및
상기 모바일 장치와 관련된 제어기를 이용하여 신호 차단으로 인해 상기 GNSS 신호들을 이용할 수 없는 경우를 검출하고, 상기 검출에 대한 응답으로서, 수신된 지상 비콘 신호를 사용하여 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하는 수단
을 포함하는 시스템. - 제47항에 있어서,
상기 제2 수신기를 이용하여 상기 지상 비콘으로부터 네트워크 파라미터들을 획득하고, 최종 공지된 GNSS 도출 위치가 여전히 유효한지 여부를 결정하는 수단을 더 포함하는 시스템. - 제48항에 있어서,
상기 네트워크 파라미터들은 비콘 전력, 비콘 식별자, 타이밍 어드밴스, 및 왕복 시간 중 적어도 하나를 포함하는 시스템. - 제47항에 있어서,
상기 GNSS 신호들을 이용할 수 없다고 검출한 것에 응답하여 GNSS 탐색을 유예하고 상기 GNSS 수신기의 전력을 차단하는 수단을 더 포함하는 시스템. - 제47항에 있어서,
상기 모바일 장치는 모바일 전화기, 개인용 또는 자동차용 내비게이션 시스템, 및 태그 장치 중 하나에 통합되어 있으며, 상기 모바일 장치는 배터리로 전력을 공급받는 시스템. - 제47항에 있어서,
상기 GNSS 수신기 및 제2 수신기는 SDR로 구현되는 시스템. - 제47항에 있어서,
수신된 비콘 신호들을 통해 데이터를 수신하는 수단을 더 포함하고, 상기 수신된 데이터는 비콘 및 그의 네트워크에 대한 식별 정보를 포함하는 시스템. - 제53항에 있어서,
상기 비콘에 의해 송신된 프레임들로부터 네트워크 타이밍들을 결정하는 수단을 더 포함하는 시스템. - 제54항에 있어서,
상기 비콘으로부터 파일럿 채널 신호 및 동기화 채널 신호 중 적어도 하나를 수신하는 수단을 더 포함하는 시스템. - 제54항에 있어서,
셀룰러 네트워크의 브로드캐스트 제어 채널 및 IEEE 802.11 네트워크의 비콘 프레임 중 적어도 하나를 포함하는 비콘 송신들을 수신하는 수단을 더 포함하는 시스템. - 제54항에 있어서,
CDMA 또는 UMTS 셀룰러 네트워크에서의 셀-ID, GSM 셀룰러 네트워크에서의 셀-글로벌-식별자(CGI) 및 IEEE 802.11 무선 로컬 영역 네트워크에서의 기지국 식별자 중 적어도 하나를 포함하는 비콘 식별자들을 수신하는 수단을 더 포함하는 시스템. - 제47항에 있어서,
주기적인 샘플링 이벤트들 중에 인접 비콘들로부터 수신된 신호들의 세기를 측정하고 비교함으로써 고정밀 GNSS 위치 추정치를 위한 프록시로서 다수의 비콘들로부터의 수신된 비콘 신호들을 수동적으로 사용하는 수단을 더 포함하는 시스템. - 제47항에 있어서,
상기 시스템은,
상기 GNSS 수신기를 이용하여 위도, 경도, 고도, 및 타이밍을 포함하는 제1 유효 GNSS 위치를 발견하는 단계;
동시에, 상기 제2 수신기를 이용하여 미리 정해진 전송 대역들에서 하나 이상의 무선 비콘들을 검출하고 식별하는 단계;
상기 제1 유효 GNSS 위치 및 비콘들의 제1 리스트를 상기 모바일 장치 내에 로컬로 저장하는 단계;
GNSS 위치 정보를 위치 수용 애플리케이션에 전달하는 단계;
상기 위치 수용 애플리케이션에 의해 결정된 바와 같은 다음 요구되는 업데이트 시간까지 상기 GNSS 수신기가 상기 저전력 슬립 모드로 진입하는 단계;
상기 다음 요구되는 업데이트 시간까지 상기 제2 수신기가 저전력 슬립 모드로 진입하는 단계;
상기 GNSS 수신기가 유효 GNSS 위치 고정을 생성하지 못했다고 결정하면, 상기 제2 수신기는 검출가능하고 식별가능한 비콘들의 현재 리스트를 생성하는 단계;
상기 현재 비콘 리스트를 상기 최종 유효 GNSS 고정과 시간적으로 관련된 이전 비콘 리스트와 비교하는 단계;
이전 비콘 리스트와 현재 비콘 리스트 모두에 제한된 범위의 비콘이 존재한다고 결정하면, 상기 모바일 장치는 상기 최종 유효 GNSS 위치를 재사용하며, 상기 GNSS 수신기를 스위치 오프하고 트리거링 조건들을 설정하여 상기 트리거링 조건들을 충족시키는 더 늦은 시간에 GNSS 위치확인을 재활성화하고 재시도하는 단계
를 포함하는 프로세스를 수행하는 수단을 더 포함함으로써 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하는 시스템. - 제59항에 있어서,
GNSS 트리거링 이벤트를 검출하는 단계;
상기 제어기가 현재 시간, 최종 유효 위치, 저장된 연감 및 일지 데이터를 상기 GNSS 수신기에 업로드하는 단계;
상기 GNSS 수신기가 위치결정을 성공적으로 수행하고, GNSS 생성 정보가 상기 위치 수용 애플리케이션에 저장되고 전달되는 단계;
상기 제2 수신기는 검출가능하고 식별가능한 비콘들에 대해 스캔하여 상기 제어기에 리스트를 보고하고 상기 저전력 슬립 모드로 들어가는 단계; 및
새로 고친 비콘 리스트 및 시간 스탬프를 저장하는 단계
를 포함하는 프로세스를 수행하는 수단을 더 포함함으로써 상기 모바일 장치가 상기 트리거링 이벤트 후 GNSS 위치확인을 재개하는 시스템. - 제47항에 있어서,
상기 GNSS 수신기 및 상기 제2 수신기 모두를 사용하여 각각의 수신기로부터 동시에 정보를 수집하고, 상기 비콘의 송신 전력을 측정하고 그 측정을 이전의 GNSS 위치 고정시에 기록된 상기 비콘의 송신 전력과 비교하며, 상기 비교에 기반하여 상기 비콘을 향하거나 상기 비콘으로부터 멀어지는 모션을 검출하는 수단을 더 포함하는 시스템. - 제47항에 있어서,
상기 GNSS 수신기를 이용하여 위도, 경도, 고도, 및 타이밍을 포함하는 제1 유효 GNSS 위치를 발견하는 단계;
동시에, 상기 제2 수신기를 이용하여 미리 정해진 전송 대역들에서 하나 이상의 무선 비콘들을 검출하고 식별하는 단계 - 상기 하나 이상의 무선 비콘들은 셀룰러 네트워크 송신기들로부터의 브로드캐스트 신호들을 포함함 -;
상기 GNSS 위치 정보를 위치 수용 애플리케이션에 전달하는 단계;
상기 위치 수용 애플리케이션에 의해 결정된 바와 같은 다음 요구되는 업데이트 시간까지 상기 GNSS 수신기가 저전력 슬립 모드로 진입하는 단계;
상기 제2 수신기는 상기 다음 요구되는 업데이트 시간까지 저전력 슬립 모드로 진입하는 단계;
상기 GNSS 수신기가 유효 GNSS 위치 고정을 생성하지 못했다고 결정하면, 상기 제2 수신기는 검출가능하고 식별가능한 비콘들의 현재 리스트를 생성하는 단계;
상기 현재 리스트를 상기 최종 유효 GNSS 고정과 시간적으로 관련된 이전 비콘 리스트와 비교하고, 비콘 신호들 간의 상대적 타이밍 차이 및 전력 차이 중 하나를 사용하여 근사치의 위치 변경을 결정하는 단계; 및
상기 근사치의 위치 변경에 기반하여 상기 모바일 장치가 상기 최종 유효 GNSS 위치의 유효성을 결정하는 단계
를 포함하는 프로세스를 수행하는 수단을 더 포함함으로써 상기 모바일 장치가 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하는 시스템. - 제47항에 있어서,
상기 제2 수신기는 통신 송수신기로 구현되는 시스템. - 제63항에 있어서,
상기 통신 송수신기를 이용하여 셀룰러 네트워크와의 접속을 재시도하고 다수의 비콘들로부터 타이밍 및 신호 데이터를 수집하는 수단을 더 포함하는 시스템. - 제63항에 있어서,
상기 통신 송수신기를 이용하여 셀룰러 네트워크와의 능동 세션을 생성하고 실패한 세션 개시를 사용하여 브로드캐스트 비콘에 이용될 수 없는 네트워크로부터 추가 정보를 수신하는 수단을 더 포함하는 시스템. - 제65항에 있어서,
상기 추가 정보는 TA, RSSI, 및 인접 비콘들의 주파수 또는 식별자들에 대한 상세 사항 중 적어도 하나를 포함하는 시스템. - 모바일 장치로서,
글로벌 내비게이션 위성 시스템(GNSS) 신호들을 수신하도록 구성된 GNSS 수신기;
지상 비콘 신호를 수신하도록 구성된 제2 수신기; 및
상기 GNSS 수신기 및 상기 제2 수신기와 동작적으로 결합된 제어기
를 포함하고,
상기 제어기는 신호 차단으로 인해 GNSS 신호들이 이용할 수 없는 경우를 검출하며, 상기 검출에 대한 응답으로서, 상기 수신된 지상 비콘 신호를 이용하여 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하며,
상기 모바일 장치는,
상기 GNSS 수신기를 이용하여 제1 유효 GNSS 위치를 발견하는 단계;
상기 제2 수신기를 이용하여 미리 정해진 전송 대역들에서 하나 이상의 무선 비콘들을 검출하고 식별하는 단계;
상기 제1 유효 GNSS 위치 및 제1 비콘 리스트를 로컬로 저장하는 단계;
상기 GNSS 수신기가 유효 GNSS 위치 고정을 생성하지 못했다고 결정하면, 상기 최종 유효 GNSS 고정과 시간적으로 관련된 이전 비콘 리스트를 검출가능하고 식별가능한 비콘들의 현재 리스트와 비교하는 단계; 및
이전 비콘 리스트와 현재 비콘 리스트들 모두에 제한된 범위의 비콘이 존재한다고 결정하면, 상기 모바일 장치가 상기 최종 유효 GNSS 위치를 재사용하는 단계
를 수행함으로써 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하도록 또한 구성되는 모바일 장치. - 모바일 장치의 위치를 결정하는데 사용되는 시스템으로서,
상기 모바일 장치와 관련된 글로벌 내비게이션 위성 시스템(GNSS)을 이용하여 GNSS 신호들을 수신하는 수단;
상기 모바일 장치와 관련된 제2 수신기를 이용하여 지상 비콘 신호를 수신하는 수단; 및
상기 모바일 장치와 관련된 제어기를 이용하여 신호 차단으로 인해 상기 GNSS 신호들을 이용할 수 없는 경우를 검출하며, 상기 검출에 대한 응답으로서, 수신된 지상 비콘 신호를 사용하여 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하는 수단
을 포함하고,
상기 시스템은,
상기 GNSS 수신기를 이용하여 제1 유효 GNSS 위치를 발견하는 단계;
상기 제2 수신기를 이용하여 미리 정해진 전송 대역에서 하나 이상의 무선 비콘들을 검출하고 식별하는 단계;
상기 제1 유효 GNSS 위치 및 비콘들의 제1 리스트를 상기 모바일 장치 내에 로컬로 저장하는 단계; 및
상기 GNSS 수신기가 유효 GNSS 위치 고정을 생성하지 못했다고 결정하면, 상기 최종 유효 GNSS 고정과 시간적으로 관련된 이전 비콘 리스트를 검출가능하고 식별가능한 비콘들의 현재 리스트와 비교하는 단계; 및
이전 비콘 리스트와 현재 비콘 리스트 모두에 제한된 범위의 비콘이 존재한다고 결정하면, 상기 모바일 장치가 상기 최종 유효 GNSS 위치를 재사용하는 단계
를 수행함으로써 이전의 GNSS 위치 업데이트가 유효한지 여부를 결정하도록 구성된 시스템.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/641,807 | 2009-12-18 | ||
| US12/641,807 US8199051B2 (en) | 2009-12-18 | 2009-12-18 | Satellite positioning receiver and proxy location system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20120105530A true KR20120105530A (ko) | 2012-09-25 |
Family
ID=44150274
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020127018785A KR20120105530A (ko) | 2009-12-18 | 2010-11-30 | 위성 위치결정 수신기 및 프록시 위치확인 시스템 |
Country Status (11)
| Country | Link |
|---|---|
| US (2) | US8199051B2 (ko) |
| EP (1) | EP2514227A4 (ko) |
| JP (1) | JP2013514533A (ko) |
| KR (1) | KR20120105530A (ko) |
| CN (1) | CN102640529B (ko) |
| AU (1) | AU2010332185B2 (ko) |
| BR (1) | BR112012014638A2 (ko) |
| CA (1) | CA2779464C (ko) |
| IL (1) | IL219431A0 (ko) |
| MX (1) | MX2012006826A (ko) |
| WO (1) | WO2011075308A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200026928A (ko) * | 2017-08-01 | 2020-03-11 | 삼성전자주식회사 | 사용자 장치를 위한 위치 결정 방법 및 디바이스와 사용자 장치 |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9198137B2 (en) | 2011-07-28 | 2015-11-24 | Broadcom Corporation | Network controlled filtering over wireless device communications |
| US8675535B2 (en) * | 2012-01-11 | 2014-03-18 | Qualcomm Incorporated | Reducing power consumption in a mobile communication device in response to motion detection |
| WO2013155386A1 (en) * | 2012-04-12 | 2013-10-17 | P.W. Precyse Wireless Ltd. | Gps positioning system |
| US9167551B2 (en) | 2012-07-31 | 2015-10-20 | Qualcomm Incorporated | Mobile access point detection |
| US9084122B2 (en) * | 2012-07-31 | 2015-07-14 | Qualcomm Incorporated | Processing of access point crowdsourcing data |
| US9820262B2 (en) * | 2012-09-20 | 2017-11-14 | Panasonic Intellectual Property Management Co., Ltd. | Control device, communication system, and method for registering terminal devices and scanning for other control devices |
| US8712690B1 (en) * | 2013-01-11 | 2014-04-29 | Intermec Ip Corp. | Systems, methods, and apparatus to determine physical location and routing within a field of low power beacons |
| GB2510169A (en) * | 2013-01-28 | 2014-07-30 | Microsoft Corp | Determining a location of a mobile user terminal |
| US9191897B2 (en) | 2013-03-22 | 2015-11-17 | Qualcomm Incorporated | Mobile device power management while providing location services |
| US9712971B2 (en) * | 2013-08-01 | 2017-07-18 | Freeus, Llc | Automatic location address translation and less accurate location technology address to more accurate location technology address translation |
| US9730163B2 (en) | 2013-08-27 | 2017-08-08 | Life360, Inc. | Apparatus and method for conservation of battery power of mobile devices within a location-based group |
| US9258677B2 (en) | 2013-11-21 | 2016-02-09 | Microsoft Technology Licensing, Llc | Improving scalability and reliability of hardware geo-fencing with failover support |
| WO2015133319A1 (ja) * | 2014-03-05 | 2015-09-11 | ソニー株式会社 | 受信装置および受信方法 |
| KR102297167B1 (ko) * | 2015-03-18 | 2021-09-01 | 에스케이플래닛 주식회사 | 위치 측정이 이루어지는 단말 및 그 동작 방법 |
| KR102427822B1 (ko) | 2015-08-12 | 2022-08-01 | 삼성전자주식회사 | 위치 정보 제공 방법 및 장치 |
| US9894475B2 (en) | 2015-10-20 | 2018-02-13 | Perfect Sense, Inc. | Micro-location monitoring techniques |
| KR102557529B1 (ko) * | 2016-02-05 | 2023-07-20 | 삼성전자주식회사 | 크라우드소싱 서비스를 제공하는 방법 및 장치 |
| US10097952B2 (en) * | 2016-05-20 | 2018-10-09 | Bi Incorporated | Systems and methods for monitoring altitude sensing beacons |
| US10039359B2 (en) | 2016-06-28 | 2018-08-07 | Jack Barron | Catastrophic event responsive travel case with flotation and alerting |
| EP3337042B1 (en) * | 2016-12-14 | 2020-11-25 | Intel IP Corporation | Cellular handset device |
| CN109791209B (zh) * | 2017-04-06 | 2022-02-25 | 华为技术有限公司 | 一种定位方法及装置 |
| CN108333612A (zh) * | 2018-01-05 | 2018-07-27 | 深圳市沃特沃德股份有限公司 | 定位方法、装置和智能手表 |
| US10641904B2 (en) * | 2018-02-14 | 2020-05-05 | United States Of America As Represented By Secretary Of The Navy | Auxiliary global positioning system |
| CN112955771A (zh) * | 2019-02-08 | 2021-06-11 | 丰田自动车株式会社 | 移动体的位置确定系统以及位置确定系统所使用的移动体 |
| US11733349B2 (en) * | 2020-11-20 | 2023-08-22 | Bae Systems Information And Electronic Systems Integration Inc. | Realtime electronic countermeasure optimization |
| US11808882B2 (en) | 2020-11-20 | 2023-11-07 | Bae Systems Information And Electronic Systems Integration Inc. | Radar electronic countermeasures without a threat database |
| WO2023050300A1 (en) * | 2021-09-30 | 2023-04-06 | Zte Corporation | Configuration of validity timer |
| US20240103182A1 (en) * | 2022-09-27 | 2024-03-28 | Bae Systems Information And Electronic Systems Integration Inc. | Navigation system with embedded software defined radio |
| CN117060986B (zh) * | 2023-10-11 | 2023-12-22 | 北京安天网络安全技术有限公司 | 一种卫星信号接收系统 |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1020014A (ja) * | 1996-07-09 | 1998-01-23 | Matsushita Electric Ind Co Ltd | 位置検出装置 |
| US6366571B1 (en) * | 1998-06-01 | 2002-04-02 | Ameritech Corporation | Integration of remote microcell with CDMA infrastructure |
| US6298229B1 (en) * | 1998-12-04 | 2001-10-02 | General Electric Company | GPS receiver for emergency location reporting during intermittent shadowing |
| US6563809B1 (en) * | 1999-04-28 | 2003-05-13 | Tantivy Communications, Inc. | Subscriber-controlled registration technique in a CDMA system |
| US6327535B1 (en) * | 2000-04-05 | 2001-12-04 | Microsoft Corporation | Location beaconing methods and systems |
| US7551931B2 (en) * | 2001-01-24 | 2009-06-23 | Motorola, Inc. | Method and system for validating a mobile station location fix |
| JP2002228739A (ja) * | 2001-01-29 | 2002-08-14 | Denso Corp | ナビゲーションシステム及びgps端末 |
| EP1361664B1 (en) * | 2002-05-10 | 2008-08-06 | Texas Instruments Incorporated | LDO regulator with sleep mode |
| US7711375B2 (en) * | 2002-08-06 | 2010-05-04 | Hang Liu | Method and system for determining a location of a wireless transmitting device and guiding the search for the same |
| US6774842B2 (en) * | 2002-12-03 | 2004-08-10 | Nokia Corporation | Generating entries for a database supporting a positioning of a mobile terminal |
| BRPI0409676A (pt) * | 2003-04-25 | 2006-04-18 | Qualcomm Inc | sistema e método para obter dados de assistência de aquisição de sinal |
| JP4207668B2 (ja) * | 2003-05-26 | 2009-01-14 | セイコーエプソン株式会社 | 携帯端末測位システム |
| JP2005020216A (ja) * | 2003-06-25 | 2005-01-20 | Hitachi Ltd | 無線位置測定方法と装置 |
| US20050124294A1 (en) * | 2003-11-17 | 2005-06-09 | Conextant Systems, Inc. | Wireless access point simultaneously supporting basic service sets on multiple channels |
| US7327258B2 (en) * | 2004-02-04 | 2008-02-05 | Guardian Mobile Monitoring Systems | System for, and method of, monitoring the movements of mobile items |
| US7477906B2 (en) * | 2004-02-27 | 2009-01-13 | Research In Motion Limited | Methods and apparatus for facilitating the determination of GPS location information for a mobile station without disrupting communications of a voice call |
| WO2006006530A1 (ja) * | 2004-07-09 | 2006-01-19 | Vodafone K.K. | 測位方法及び移動通信端末装置 |
| US7315281B2 (en) * | 2004-07-30 | 2008-01-01 | G2 Microsystems Pty. Ltd. | Location determination method and system for asset tracking devices |
| KR101099151B1 (ko) * | 2004-10-29 | 2011-12-27 | 스카이후크 와이어리스, 인크. | 위치 표지 데이터베이스와 서버, 위치 표지 데이터베이스구축 방법 및 이것을 이용한 위치 기반 서비스 |
| JP2006153695A (ja) * | 2004-11-30 | 2006-06-15 | Matsushita Electric Works Ltd | 位置検出方法および装置 |
| US7411492B2 (en) * | 2005-03-09 | 2008-08-12 | Stephen Jay Greenberg | Pet tracking systems, other tracking systems, and portable virtual fence |
| TWI271536B (en) * | 2005-06-27 | 2007-01-21 | Lite On Technology Corp | Position indicating system |
| US8023959B2 (en) * | 2006-06-28 | 2011-09-20 | Motorola Mobility, Inc. | Method and system for personal area networks |
| US7573380B2 (en) * | 2006-06-30 | 2009-08-11 | Motorola, Inc. | Method and system for requesting help by user of communication device |
| CA2662023C (en) * | 2006-08-29 | 2013-02-19 | Satellite Tracking Of People Llc | Wireless tag and auxiliary device for use with home monitoring unit for tracking individuals or objects |
| US7856234B2 (en) * | 2006-11-07 | 2010-12-21 | Skyhook Wireless, Inc. | System and method for estimating positioning error within a WLAN-based positioning system |
| JP2008224657A (ja) * | 2007-02-15 | 2008-09-25 | Seiko Epson Corp | 現在位置推定方法、測位方法、プログラム及び移動体端末 |
| US8081989B2 (en) * | 2007-04-19 | 2011-12-20 | Trimble Navigation Limited | Legacy cellular device with upgraded GIS functionality |
| JP5374844B2 (ja) * | 2007-07-25 | 2013-12-25 | セイコーエプソン株式会社 | 測位誤差発生判定方法、測位位置出力制御方法、測位方法、プログラム及び測位装置 |
| US7595754B2 (en) * | 2007-12-24 | 2009-09-29 | Qualcomm Incorporated | Methods, systems and apparatus for integrated wireless device location determination |
| JP2009171365A (ja) * | 2008-01-17 | 2009-07-30 | Nec Corp | 位置情報サービス提供システム、方法、プログラム、移動体端末及びアクセスポイント |
| US8214139B2 (en) | 2008-01-25 | 2012-07-03 | Garmin Switzerland Gmbh | Position source selection |
| JP5077678B2 (ja) * | 2008-02-25 | 2012-11-21 | Necカシオモバイルコミュニケーションズ株式会社 | 通信端末装置及びプログラム |
| US8085190B2 (en) * | 2008-03-31 | 2011-12-27 | Intel Corporation | Method and apparatus for faster global positioning system (GPS) location using a pre-computed spatial location for tracking GPS satellites |
| US20090303114A1 (en) * | 2008-06-06 | 2009-12-10 | Skyhook Wireless, Inc. | Method and system for determining location using a hybrid satellite and wlan positioning system by selecting the best wlan-ps solution |
| US8897801B2 (en) * | 2008-06-13 | 2014-11-25 | Qualcomm Incorporated | Transmission of location information by a transmitter as an aid to location services |
-
2009
- 2009-12-18 US US12/641,807 patent/US8199051B2/en active Active
-
2010
- 2010-11-30 KR KR1020127018785A patent/KR20120105530A/ko not_active Application Discontinuation
- 2010-11-30 JP JP2012544575A patent/JP2013514533A/ja active Pending
- 2010-11-30 EP EP20100838109 patent/EP2514227A4/en not_active Withdrawn
- 2010-11-30 BR BR112012014638A patent/BR112012014638A2/pt not_active IP Right Cessation
- 2010-11-30 CN CN201080054006.7A patent/CN102640529B/zh not_active Expired - Fee Related
- 2010-11-30 CA CA2779464A patent/CA2779464C/en not_active Expired - Fee Related
- 2010-11-30 WO PCT/US2010/058417 patent/WO2011075308A1/en active Application Filing
- 2010-11-30 MX MX2012006826A patent/MX2012006826A/es active IP Right Grant
- 2010-11-30 AU AU2010332185A patent/AU2010332185B2/en not_active Ceased
-
2012
- 2012-04-04 US US13/439,287 patent/US9354323B2/en active Active
- 2012-04-25 IL IL219431A patent/IL219431A0/en unknown
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200026928A (ko) * | 2017-08-01 | 2020-03-11 | 삼성전자주식회사 | 사용자 장치를 위한 위치 결정 방법 및 디바이스와 사용자 장치 |
| US11330549B2 (en) | 2017-08-01 | 2022-05-10 | Samsung Electronics Co., Ltd. | Positioning method and device for user equipment, and user equipment |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2514227A1 (en) | 2012-10-24 |
| US8199051B2 (en) | 2012-06-12 |
| BR112012014638A2 (pt) | 2016-03-01 |
| EP2514227A4 (en) | 2014-07-23 |
| CN102640529B (zh) | 2016-02-24 |
| IL219431A0 (en) | 2012-06-28 |
| AU2010332185A1 (en) | 2012-05-24 |
| MX2012006826A (es) | 2012-07-17 |
| US9354323B2 (en) | 2016-05-31 |
| WO2011075308A1 (en) | 2011-06-23 |
| CA2779464A1 (en) | 2011-06-23 |
| CA2779464C (en) | 2016-09-13 |
| AU2010332185B2 (en) | 2014-10-02 |
| CN102640529A (zh) | 2012-08-15 |
| US20120194382A1 (en) | 2012-08-02 |
| JP2013514533A (ja) | 2013-04-25 |
| US20110148699A1 (en) | 2011-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2779464C (en) | Satellite positioning receiver and proxy location system | |
| CN101120265B (zh) | 用于在无线通信网络中定位移动终端的混合定位方法和系统 | |
| US6603978B1 (en) | Accurate GPS time estimate based on information from a wireless communications system | |
| EP1749215B1 (en) | Improved data messaging efficiency for an assisted wireless position determination system | |
| US7706975B2 (en) | Mobile cellular identification database for enhanced GPS performance | |
| EP2641416B1 (en) | Self-positioning of a wireless station | |
| CN101981464B (zh) | 用于降低sps操作中初始定位不定性的系统和/或方法 | |
| US7831216B1 (en) | Mobile-station-assisted low-cost-internet-base-station-(LCIB) location determination | |
| US20100113061A1 (en) | Method and apparatus to confirm mobile equipment has remained relatively stationary using one or more pilot signal | |
| GB2476718A (en) | GPS positioning with aiding from short range networks | |
| WO1999054753A1 (en) | System and method for provisioning assistance global positioning system information to a mobile station | |
| AU2005208888A1 (en) | A communication system, a communication terminal and a method of determining a location estimate therefor | |
| KR100558516B1 (ko) | 이동통신 단말기에서 지피에스를 이용한 위치 추적 방법 | |
| WO2005025249A1 (en) | Method for minimizing the maximum system time uncertainty for a mobile station | |
| CN115996080A (zh) | 非陆地网络 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |