KR101102802B1 - 영구 자석 교류기용 제어기 - Google Patents
영구 자석 교류기용 제어기 Download PDFInfo
- Publication number
- KR101102802B1 KR101102802B1 KR1020057023235A KR20057023235A KR101102802B1 KR 101102802 B1 KR101102802 B1 KR 101102802B1 KR 1020057023235 A KR1020057023235 A KR 1020057023235A KR 20057023235 A KR20057023235 A KR 20057023235A KR 101102802 B1 KR101102802 B1 KR 101102802B1
- Authority
- KR
- South Korea
- Prior art keywords
- voltage
- output
- signal
- predetermined
- switch
- Prior art date
Links
Images































































Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P9/00—Arrangements for controlling electric generators for the purpose of obtaining a desired output
- H02P9/48—Arrangements for obtaining a constant output value at varying speed of the generator, e.g. on vehicle
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P9/00—Arrangements for controlling electric generators for the purpose of obtaining a desired output
- H02P9/14—Arrangements for controlling electric generators for the purpose of obtaining a desired output by variation of field
- H02P9/26—Arrangements for controlling electric generators for the purpose of obtaining a desired output by variation of field using discharge tubes or semiconductor devices
- H02P9/30—Arrangements for controlling electric generators for the purpose of obtaining a desired output by variation of field using discharge tubes or semiconductor devices using semiconductor devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/02—Conversion of ac power input into dc power output without possibility of reversal
- H02M7/04—Conversion of ac power input into dc power output without possibility of reversal by static converters
- H02M7/12—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/21—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/217—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only
- H02M7/2176—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only comprising a passive stage to generate a rectified sinusoidal voltage and a controlled switching element in series between such stage and the output
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P9/00—Arrangements for controlling electric generators for the purpose of obtaining a desired output
- H02P9/14—Arrangements for controlling electric generators for the purpose of obtaining a desired output by variation of field
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P9/00—Arrangements for controlling electric generators for the purpose of obtaining a desired output
- H02P9/14—Arrangements for controlling electric generators for the purpose of obtaining a desired output by variation of field
- H02P9/26—Arrangements for controlling electric generators for the purpose of obtaining a desired output by variation of field using discharge tubes or semiconductor devices
- H02P9/30—Arrangements for controlling electric generators for the purpose of obtaining a desired output by variation of field using discharge tubes or semiconductor devices using semiconductor devices
- H02P9/305—Arrangements for controlling electric generators for the purpose of obtaining a desired output by variation of field using discharge tubes or semiconductor devices using semiconductor devices controlling voltage
- H02P9/307—Arrangements for controlling electric generators for the purpose of obtaining a desired output by variation of field using discharge tubes or semiconductor devices using semiconductor devices controlling voltage more than one voltage output
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- H02M1/0083—Converters characterised by their input or output configuration
- H02M1/0085—Partially controlled bridges
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Eletrric Generators (AREA)
- Rectifiers (AREA)
- Dc-Dc Converters (AREA)
Abstract
본 발명은 제어 시스템에 관한 것으로, 특히 영구 자석 교류기를 제어하여, 상대적으로 정확한 전압 조정을 제공하는 것에 관한 것이다. 본 발명의 제어 시스템은 (1) 교류기의 출력 전압을 정류하고, 조정하는 정류 시스템, (2) 부스트(boost) 타입 조정자로의 전력원으로 사용되는 정류기/리미터, (3) 다중 모드 정류기/리미터, (4) DC-AC 인버터 브리지 및 (5) 전력 스위치에서 열로서 소실될 스위칭 에너지를 최소화하기 위하여 시스템에서 이용되는 전력 스위치 중 하나 이상을 포함한다.
교류기, 영구 자석, 전압 조정
Description
관련 출원
본 출원은 2003년 6월 2일 출원된 미국 가출원 제60/475,273호 및 2003년 12월 24일 출원된 미국 가출원 제60/532,664호의 우선권을 주장하며, 이는 본 명세서에서 참조로서 인용된다.
본 발명은 기계 에너지와 전기 에너지 사이를 변환하는 기계에 관한 것으로, 보다 구체적으로는 자동차에 이용하기 적합한 컴팩트 영구 자석 고전력 교류기에 관한 것이다.
교류기는 전형적으로 회전 샤프트(shaft) 상에 탑재되고, 고정된 고정자(stationary stator)에 대하여 동심적으로 위치하는 회전자(rotor)를 포함한다. 회전자는 전형적으로 고정자 내에 위치한다. 그러나, 이와 달리 고정자가 회전자 내에 동심적으로 위치할 수도 있을 것이다. 통상적으로 회전 소자를 구동하는 모터(motor) 또는 터빈(turbine)과 같은 외부 에너지원은 직접적으로 또는 풀리 벨트(pulley bent)과 같은 중간 시스템을 통해서 회전 소자를 구동한다. 고정자 및 회전자 모두는 일련의 폴(pole)을 가진다. 회전자 또는 고정자는 다른 구조물의 폴들의 권선과 상호작용하는 자계를 발생시킨다. 자계가 권선을 인터셉트 (intercept)할 때에, 전계가 발생되고, 적절한 부하에 제공된다. (통상적으로 전압원으로 불리는)유도 전계는 전형적으로 정류기에 인가되고, 때때로 조정되어 DC 출력 전원으로서 제공된다. 유도 전류는 전형적으로 정류기에 인가되고, 때때로 조정되어 DC 출력 전원으로서 제공된다. 몇몇 경우에, 조정된 DC 출력 신호가 DC-AC 변환기에 제공되어 AC 출력을 제공한다.
통상적으로, 자동차 애플리케이션에서 이용되는 교류기는 엔진의 외부에 탑재되는 하우징(housing)과, 하우징 내에 위치한 3상 권선을 가지는 고정자와, 고정자 내의 하우징에 회전가능하게 지지되는 벨트 구동 크로 폴 타입(claw-pole)(예컨대, Lundell) 회전자를 포함한다. 그러나, 전력 출력을 증가시키기 위해서는 통상적인 교류기의 크기는 상당히 증가되어야 한다. 따라서, 자동차의 공간 제약은 이러한 교류기가, 예컨대 에어컨, 냉장고 또는 통신 장치에 전력을 공급하는 5KW 정도의 고출력 애플리케이션에 사용되는 것을 어렵게 한다.
추가적으로, 권선을 수반하는 크로 폴 타입 회전자는 비교적 무거우며(종종 교류기의 전체 무게의 3/4를 차지함), 상당한 관성(inertia)을 생성한다. 이러한 관성은, 결과적으로 엔진이 가속될 때마다 엔진에 부하를 제공한다. 이것은 엔진의 효율성을 감소시키는 경향이 있으며, 이는 추가적인 연료 소비를 야기한다. 추가적으로, 이러한 관성은 전기 또는 하이브리드 자동차와 같은 애플리케이션에 있어서 문제가 될 수 있다. 하이브리드 자동차는 자동차를, 예컨대 30Kph(전형적으로 가솔린 엔진이 가장 효율적인 RPM 범위에 해당함)와 같은 소정의 임계치 이상의 속도로 추진시키는 데에 가솔린 엔진을 이용한다. 유사하게, 소위 "마일드 하이브 리드(mild hybrid)"에서는 시동 발진기가 이용되어 운전자가 액셀레이터 페달을 누르는 경우에 초기 추진 폭발을 제공하며, 자동차가 운행중 정지하는 경우에 연료를 절약하고 연료 방사를 줄이기 위하여 자동차 엔진을 정지시키는 것을 돕는다. 이러한 마일드 하이브리드 시스템은 전형적으로 고압(예컨대, 42 V) 전기 시스템의 이용을 고려한다. 이러한 시스템 내의 교류기는 연속하는 정지 사이에, 특히 정지 및 진행에서 초기 추진 폭발을 제공하기 위한 시동 발진기를 구동하기 위하여 배터리를 충분한 레벨로 재충전할 수 있어야 한다. 따라서, 비교적 높은 전력, 낮은 관성의 교류기가 필요하다.
통상적으로, 자동차의 제어 및 구동 시스템, 에어컨 및 애플리케이션에 전력을 공급하기 위한 추가적인 전력에 대한 요구가 있어왔다. 이것은 냉장고와 같은 재창조적인 산업용 운송 애플리케이션, 건축 애플리케이션 및 군사 애플리케이션을 위한 자동차에 있어서는 특히 그러하다.
예컨대, 자동차 산업에 있어서 자동차 엔진 상의 전력 부하를 감소시키고, 연료 경제성을 향상시키는 데에 물리적 또는 하이브리드 제어 및 구동 시스템보다 지능형 전기 제품을 이용하는 경향이 존재한다. 이러한 시스템은, 예컨대 (전형적으로 스티어링 보정이 요구되는 경우에만 활성 상태인)스티어링 서보, (충격 흡수기의 도로 및 속도 조건에 따른 경직성을 조정하는 데에 피드백을 이용하는)충격 흡수기, (일정한 온도를 유지하기 위하여 요구되는 최소 속도에서 컴프레서를 동작시키는)에어컨과 결합하여 이용될 수 있을 것이다. 이러한 전기 제어 및 구동 시스템의 이용은 자동차의 전력 시스템에 대한 요구를 증가시키는 경향을 띤다.
유사하게, 이동 냉장 시스템은 전기적으로 구동되는 것이 바람직하다. 예를 들어, 가변의 속도로 냉장 시스템을 구동하는 것(차량 엔진 rpm과는 무관하게)은 효율을 증가시킬 수 있다. 또한, 전기적으로 구동된 시스템으로, 예를 들면, (엔진의)컴프레서, 컨덴서(공기에 노출되도록 배치됨) 및 증발(evaporation) 유니트(저온 구획(cold compartment)에 위치됨)와 같은 다양한 구성요소들을 연결하는 호스들은 가정 냉장고 또는 에어컨과 유사한 전기 구동 밀봉된(electrically driven hermetically sealed) 시스템에 의하여 대체될 수 있다. 따라서, 그러한 애플리케이션의 차량 전력 시스템은 전기 구동 유니트에 대하여 필요한 전력 레벨을 제공할 수 있는 것이 바람직하다.
또한, 고전압 교류기를 "제거 및 대체"하여 기존의 차량들을 갱신할 특별한 필요가 존재한다. 교류기를 수용하기 위하여 차량의 엔진 구획 내의 제한된 공간만이 제공되는 것이 통상적이다. 그 이용 가능한 공간 내에 대체 교류기가 맞지 않으면, 설비(installation)는, 가능하더라도, 매우 복잡해지고, 통상적으로는 라디에이터, 범퍼, 등과 같은 주요 구성요소들 및 여분의 브래킷, 벨트 및 하드웨어의 설비 제거를 필요로 한다. 따라서, 대체 교류기가 원래의 제공된 공간에 맞고, 원래의 하드웨어와 인터페이스하는 것이 바람직하다.
일반적으로, 영구 자석 교류기(permanent magnet alternators)는 공지되어 있다. 그러한 교류기들은 필요한 자계를 생성하기 위하여 영구 자석을 이용한다. 영구 자석 발전기는 전통적인 권선형 자계 발전기(wound field generators)보다 더 가볍고 더 작은 경향이 있다. 영구 자석 교류기들의 예들은 1997년 4월 29일 Scott et al에게 부여된 미국특허 5,625,276; 1998년 1월 6일 Scott et al에게 부여된 5,705,917; 1999년 3월 23일 Scott et al에게 부여된 5,886,504; 1999년 7월 27일 Scott et al에게 부여된 5,92,611; 2000년 3월 7일 Scott et al에게 부여된 6,034,511; 및 2002년 8월 27에 Scott에게 부여된 6,441,522에 개시되어 있다.
특히 가볍고 컴팩트한 영구 자석 교류기들은 "외부" 영구 자석 회전자(rotor) 및 "내부" 고정자(stator)를 채용함으로써 구현될 수 있다. 회전자는 속이 빈 실린더형 케이싱을 포함하며 그 내부면에는 고에너지 영구 자석이 배치된다. 고정자는 회전자 케이싱 내부에 동심으로 배치된다. 고정자 주위에서의 회전자의 회전은 회전자 자석으로부터의 자속이 고정자 권선과 상호작용하여 전류를 유도하도록 한다. 그러한 교류기의 일 예는 예를 들면, 이전에 언급된, 1998년 1월 6일 Scott et al에게 부여된 미국 특허 5,705,917 및 1999년 7월 27일 스콧(Scott) 등에게 부여된 5,92,611에 개시되어 있다.
영구 자석 발전기에 의하여 제공된 전력은 회전자의 속도에 따라 크게 변화한다. 많은 애플리케이션에서, 회전자 속도의 변화는, 예를 들면, 자동차의 엔진 속도 변화, 또는 부하특성의 변화로 인하여, 통상적인 것이다. 따라서, 전자제어 시스템이 이용되는 것이 보통이다. 영구 자석 교류기 및 그 제어 시스템의 일 예는 이전에 언급된 1997년 4월 29일 스콧 등에 al에 부여된 미국특허 5,625,276에 개시되어 있다. 다른 제어 시스템의 예들은 2000년 1월 25일 앤더슨(Anderson) 등에게 부여된 미국특허 6,018,200에 개시된다.
광범위한 회전자 속도를 이용할 필요성은 특히 자동차 애플리케이션에서 중 요하다. 예를 들면, 대형 디젤 트럭 엔진은 유휴상태(idle)에서의 600 RPM 내지 하이웨이 속도에서의 2600 RPM에서 동작하는 것이 통상적이며, 트럭의 속도를 늦추기 위하여 엔진이 이용될 때, 경우에 따라 300 RPM까지 버스트된다. 따라서 교류기 시스템은 RPM에서의 5:1 변화를 겪는다. 경량용(light duty) 디젤은 다소 더 넓은 범위, 예를 들면 600 내지 4,000 RPM에 걸쳐서 동작한다. 가솔린 차량 엔진과 함께 이용된 교류기들은 통상적으로 더 넓은 범위의 RPM, 예를 들면, 600 내지 6500 RPM을 수용해야 한다. 또한, 교류기는 부하의 변동, 예를 들면, 무부하 내지 전부하를 수용해야 한다. 따라서 가솔린 차량 엔진과 함께 이용된 영구 자석 교류기의 출력 전압은 12:1 변화를 겪을 수 있다. 따라서, 종래의 영구 자석 교류기가 주어진 부하로 유휴상태인 동안 동작 전압(예를 들면, 12 볼트)를 제공할 것이 요구되면, 그 부하로 전체 엔진 RPM에서, 상기 동작 전압의 복수배, 예를 들면 그 전압의 10배(예를 들면 120 볼트)를 제공할 것이다. 예를 들어, 전기 구동 에어컨, 또는 통신장치에 대하여 유휴 상태의 전압이 120 V인 경우, 전체 엔진 RPM에서의 전압은 예를 들면 1200 볼트일 것이다. 그런 전압 레벨들은 다루기가 힘들며, 사실상 위험하다. 또한, 전압 및 전류의 그러한 심한 변동들은 더욱 비싼 부품들을 필요로 할 것이며, 높은 엔진 RPM(예를 들면 하이웨이 속도)에서 생성된 높은 전압 및 전류에 대하여 정격인 부품들은 더 낮은 전압들에 대하여 정격인 부품들보다 상당히 비싸다.
영구 자석 교류기들로부터의 광범위한 출력전압들을 수용하기 위한 다양한 시도들이 이루어졌다. 예를 들면, 상기 언급된 Scott et al 미국특허 5,625,276은 원하는 출력을 얻기 위하여 개별 권선들을 선택적으로 활성화시키는 제어기를 기술한다. 권선들은 비교적 낮은 전압 레벨들에서 높은 전류를 제공하기 위하여 완전히 병렬인 구성으로, 또는 높은 전압 용량을 제공하기 위하여 직렬로 연결될 수 있다. 구동 RPM이 증가함에 따라, 개별 권선들은, 출력 전압 및/또는 전류를 제어하기 위한 동작회로로부터 사실상 분리된다. 그러나, 특히 모터 차량들과 같은 컴팩트 고전력, 고속비(compact high power, high speed ratio) 애플리케이션의 경우, 권선들 사이의 스위칭은 특히 RPM 범위의 높은 단(high end)에서 해로운 효과를 갖는다.
다른 시도들은 엔진 RPM과는 독립적으로, 교류기의 RPM, 및 따라서 그 전압을 제어하는 것을 포함한다. 그러한 시도의 일 예는 Dishner에게 1987년 9월 22에 부여된 미국 특허 4,695,776에 기술된다. 이 해결책들은 대형이고, 보수를 요하며 마모하기 쉬운 기계 부품들을 포함하는 경향이 있다.
다른 시도들은 출력전압을 변조하기 위하여 교류기에서 생성된 자속의 일부를 스위칭하는 것을 포함한다. 시스템의 일 예는 1989년 12월 5일에 Gokhale에게 부여된 미국특허 4,885,493에 기술된다. 그러나, 자속 스위칭은 추가적인 기계 부품을 필요로 하고 반응이 느리게 될 수 있는 것이 보통이다.
또한, 모드 의존 전달률에서 엔진 구동 교류기를 차량 전기 부하에 결합하기 위한 유연 토폴로지 DC-DC 변환기를 포함하는 자동차 전기 시스템이 알려져 있다. 이러한 시스템의 일 예는 2002년 10월 22일에 바레트(Barrett)에 허여된 미국 특허 제 6,469,476호에 개시되어 있다. 이러한 시스템에서, 교류기의 출력 전압은 부하 전압에 따라 조절되고, 변환기는 포워드 부스트 모드, 포워드 유니티 모드 및 포워드 벅 모드를 포함하는 다수의 상이한 모드들 중 하나의 모드에서 엔진 속도에 따라 동작할 수 있다. 포워드 부스트 모드에서, 변환기 출력 전압은 저속 엔진에서 배터리 충전이 가능하도록 교류기의 출력 전압보다 높게 부스트되고, 포워드 유니티 모드에서, 교류기 출력 전압은 유니티 전달률에서 배터리 및 전기 부하에 전달되며, 포워드 벅 모드에서, 변환기 출력 전압은 중간 속도에서 고속까지의 엔진 속도에서 교류기 파워 출력을 개선하기 위해 교류기 출력 전압 아래로 감소된다.
정류 및 조절은 듀티 사이클의 위상각 제어와 함께 SCR 브리지를 이용하는 단일 프로세스로 달성될 수 있다. 하지만, 전압 출력 및 리플 컨텐츠는 SCR 위상각 방법이 크기가 변하는 AC 전력원을 제어하는 데 이용되는 경우에 상당히 변할 수 있으며, 교류 주파수를 매우 빨리 바꿀 수 있다. 추가로, 자동차 시스템에서 교류기 출력으로부터 전형적으로 사용되는 전압에서 조절된 출력 신호를 유도하기 위해 이러한 SCR 브리지를 이용하는 것은 상당량의 열 및 전자기 간섭 발생에 의해 입증된 비교적 높은 스위칭(IR) 손실 및 높은 피크 전류를 수반할 가능성이 있다.
따라서, 영구 자석 교류기의 출력에서 큰 폭의 변화를 수용할 수 있으며 비교적 저렴하고 효과적인 제어 시스템이 필요하다. 정밀 오차, 예를 들어 출력에서 단지 1% 또는 2%의 변화내에서, 높은 파워 변환 효율성으로 전압을 조절할 수 있고, 비교적 적은 열이 분산될 시스템이 바람직하다. 더욱이, 이러한 제어 시스템에서 파워 스위칭 장치에 의해 생성되는 열을 최소화하고, 스위칭 동안에 전류 및 전압 (스파이크)에서 갑작스런 천이에 의해 야기되는 전자기 무선 주파수 간섭을 최소화할 필요가 있다.
본 발명의 다양한 측면에 따르면, 영구 자석 교류기의 출력에서 큰 폭의 변화를 수용할 수 있고, 비교적 정확한 전압 조절을 제공하는 비교적 저렴한 제어 시스템이 다음의 하나 이상의 구성요소에 의해 제공된다.
정류 및 조절 시스템은 비교적 높은 전압(및 비교적 낮은 전류)에서 교류기의 출력 전압을 정류하고 조절하며, 초기의 비교적 높은 전압을 원하는 출력 전압으로 변환하기 위해 하나 이상의 개별 DC-DC 변환기 및/또는 DC-AC 변환기를 이용한다.
정류기/리미터는 부스트 타입 레귤레이터로의 전기 전력원로서 이용된다.
멀티모드 정류기/리미터는 교류기 출력 및/또는 정류기/리미터 출력에 따라 풀 웨이브 정류, 풀 듀티 사이클 해프 웨이브 정류 및 펄스폭 변조 해프 웨이브 정류 모드에서 선택적으로 동작한다.
파워 스위치에서 열로서 달리 분산될 스위칭 에너지를 최소화하기 위해 이 시스템에서 사용되는 파워 스위치를 통과하는 전류 및 그 전압의 변화율을 억제하며, 바람직하게는 이 스위칭 에너지가 부하로 향하도록 다시 캡처하여 변환 효율성을 증가시키고 무선 주파수 간섭을 줄인다.
DC-AC 인버터 브리지에서, 액티브쌍의 높은 쪽 스위치는 전체 반 사이클 동안에 온으로 유지되고, 스위치 쌍 모두를 변조하길 원하지 않기 때문에 더 낮은 그라운드 쪽 스위치가 변조되고, 또는 필터 커패시터는 인버터 필터 인덕터 및 커패시터가 리셋되는 것을 확인하기 위해 파형 형성 동안에 (상호 배타적 방식으로 액티브 레그의 낮은 쪽과 동작하는) 반대편 레그의 높은 쪽을 턴온하여 (인덕터를 방전하기에 충분한) 사전설정된 지점 아래의 부하에서 방전된다.
이하, 본 발명은 달리 특정되지 않는 한 동일 부호가 동일 요소를 나타내는 첨부된 도면들과 관련하여 설명된다.
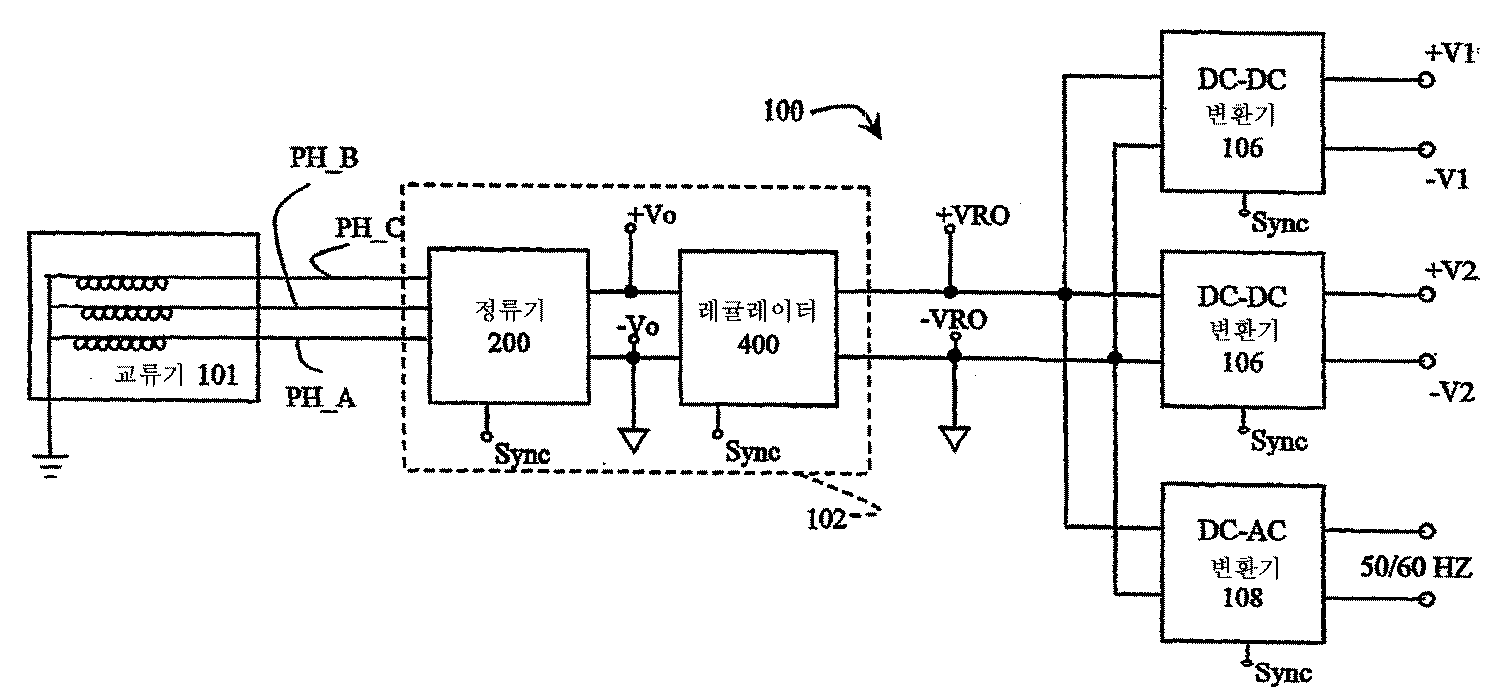
도 1은 본 발명의 다양한 양태에 따라 기계적 에너지와 전기적 에너지 간의 변환을 위한 시스템의 블록도.
도 2A 및 2B는 도 2의 정류기/리미터의 동작 모드를 나타내는 그래프.
도 2C는 본 발명의 다양한 양태에 따른 정류기/리미터의 바람직한 실시예의 블록도.
도 3A-3K(통칭하여 도 3으로 지칭함)는 도 2의 정류기/리미터의 각 구성요소의 개략도.
도 3L은 FET의 턴오프 동작 동안의 FET 전력 스위치로의 구동 신호의 전압 및 FET의 저항을 나타내는 그래프.
도 4는 본 발명의 다양한 양태에 따른 부스트 레귤레이터의 블록도.
도 5A 및 5B(통칭하여 도 5로 지칭함)는 도 4의 레귤레이터의 각 구성요소의 개략도.
도 6은 DC-DC 변환기의 블록도.
도 7A-7E(통칭하여 도 7로 지칭함)는 도 6의 DC-DC 변환기의 바람직한 실시예들의 각 구성요소의 개략도.
도 8은 사인파 인버터의 간단한 블록도.
도 9A 및 9B(통칭하여 도 9로 지칭함)는 PWM 사인파 인버터의 스위치들의 동작을 나타내는 그래프인데, 도 9A는 각 쌍의 스위치들이 동시에 작동되는 통상의 동작을 나타내고, 도 9B는 본 발명의 다양한 양태에 따른 저부하 조건에서의 동작을 나타냄.
도 10A-10G(통칭하여 도 10으로 지칭함)는 도 8의 사인파 인버터의 구성요소들의 바람직한 실시예들의 개략도.
도 11A-11L(통칭하여 도 11로 지칭함)은 도 3의 정류기/리미터의 조작을 행하기 위한 마이크로컨트롤러 프로그램의 흐름도.
도 12A-12H 및 12K-12Q(통칭하여 도 12로 지칭함)는 도 8의 인버터의 조작을 행하기 위한 마이크로컨트롤러의 흐름도.
이제, 도 1을 참조하면, 본 발명의 다양한 양태에 따른 기계적 에너지와 전기적 에너지 간의 변환을 위한 시스템은 교류기(101), 정류 및 조절 시스템(102)(정류기(200) 및 레귤레이터(400)를 적절히 포함함), 하나 이상의 DC-DC 변환기 106, 및 적절하게 DC-AC 인버터(108)를 포함한다.
일반적으로, 교류기(101)는 구동 RPM에 따라 크게 변하는 다가 위상(예를 들 어, 3상)의 미조절 AC 출력 신호(위상 A(PH_A), 위상 B(PH_B) 및 위상 C(PH_C))를 제공한다. 정류 및 조절 시스템(102)은 교류기(101)로부터의 AC 출력 신호를 정류하며, 즉 이 신호를 DC 신호(VRO)로 변환하고, 이 신호의 전압을 소정의 레벨, 예를 들어 180V로 조절하며, 즉 전압 레벨을 ±2%의 허용 오차로 유지한다. 이어서, 조절된 DC 신호(VRO)는 원하는 출력 전압 레벨(V1, V2), 예를 들어 12, 24 및/또는 42V DC로의 변환을 위해 DC-DC 변환기에 인가되며, 바람직하다면, 원하는 파형, 주파수 및 전압, 예를 들어 50/60Hz, 120V RMS 사인파의 AC 신호를 생성하는 DC-AC 인버터(108)로 인가된다. 정류 및 조절 시스템에 의해 출력되는 소정의 전압 레벨, 예를 들어 180V가 원하는 출력을 지원하도록 선택된다. 바람직한 실시예에서, 정류 및 조절 시스템(102)의 출력(VRO)은 약 180V가 되도록 선택되는데, 이 전압은 DC-AC 인버터(108)에 인가될 때 170V 피크, 즉 102V RMS 사인파를 생성한다. 12, 24 및/또는 42V DC 출력을 생성하기 위해 동일한 조절된 180V DC 신호(VRO)가 DC-DC 스텝 다운 변환기(106)에 공급된다. VRO는 비교적 높으므로, 비교적 낮은 레벨의 전류가 DC-DC 변환기(106)의 입력부로 흘러, 전력 변환 효율을 높인다.
정류 및 조절 시스템(102)을 이용하여 교류기의 출력 전압을 정류하고 비교적 높은 전압으로 조절한 후, 하나 이상의 개별 DC-DC 변환기 및/또는 DC-AC 인버터를 이용하여 비교적 높은 초기 전압을 원하는 출력 전압으로 변환하는 것은 여러 측면에서 특히 유리하다. 정류 및 비교적 높은 전압으로의 조절은, 정류 및 조절이 보다 낮은 전압에서 수행되는 경우에 만나게 되는 전류의 크기와 비교할 때 비교적 낮은 전류 레벨을 이용하는 것과 같다. 보다 낮은 크기의 전류를 이용하는 것은 정류 및 조절 기능과 관련한 전도 및 스위칭 손실 양자를 감소시킨다. 따라서, 보다 적은 열이 발생한다. 또한, 변환 기능과 별개로 모든 정류 및 조절을 수행하는 것은 보다 싸고, 보다 소박하고 간단한 전압 출력 스테이지를 사용할 수 있게 하며, 다수의 전압 출력, 예를 들어 12, 24 또는 42V DC 및 120V RMS 50/60Hz AC의 생성을 용이하게 한다.
교류기(101)는 적절하게는 영구 자석 교류기이며, 바람직하게는 2003년 7월 10일자로 "Compact High Power Alternator"라는 제목으로 찰스 와이. 라폰타인 및 헤럴드 씨. 스코트에 의해 출원되어 본 출원인이 소유하고 있는 미국 특허 가출원 번호 60/486,831에 설명되어 있는 타입의 교류기이다. 상술한 LaFontaine 등의 출원 일련번호 60/486,831은 그대로 제공되는 것과 같이 본원에 참조로 포함된다.
요약하면, 교류기(101)는 회전 샤프트에 탑재되고 정지형 고정자에 대해 동심원으로 배치된 회전자를 포함한다. 고정자는 별모양 구성에서 일단부(중립)에 함께 접속된 각 상 권선(phase windings) A, B, C를 포함한다. 권선 중립은 (폐삼각형에 의해 기호화된 제1 그라운드와 혼동되지 않고, 삼각형을 형성하는 가변 길이들의 수직 이격된 수평선들 각각에 의해 지정되는) 제2 부유 그라운드를 정의한다. 모터 또는 터빈과 같은 외부 에너지원은 일반적으로 회전 요소를 직접 구동하거나 또는 풀리 벨트와 같은 중간 시스템을 통해 구동한다. 자동차에 적용하는 경우, 교류기(101)는 통상적으로 후드 아래에 탑재되고 수송 수단의 엔진으로부터 벨트로 구동된다. 회전자와 고정자 간의 상대적인 운동으로 인해 권선에 전압이 유도된다. 교류기(101)는 바람직하게는, 유휴인 경우 소정의 최소 전압을 생성하거 나 또는 최고 부하가 걸린 상태에서는 최소 RPM을 생성하도록 설계된다. 상술한 바와 같이, 자동차에 적용하는 경우, 구동 RPM은 예를 들어 유휴시 600RPM에서부터, 큰 디젤 트럭의 경우 3000RPM(5:1 변화), 중소형 디젤의 경우 4000RPM까지 넓게 변화할 수 있고, 가솔린 수송 수단 엔진에 대해서는 600 내지 6500RPM까지 넓게 변화할 수 있다. 또한, 교류기는 부하의 변화, 즉 무부하 내지 최고 부하를 수용하여야 한다. 따라서, 가솔린 수송 수단의 엔진과 함께 사용되는 경우 영구 자석 교류기(101)의 출력 전압은 12:1 변화를 겪을 수 있다. 따라서, 종래의 영구 자석 교류기가 소정의 부하에서 유휴 속도에 있는 동안 동작 전압(예를 들어, 18V)를 제공하도록 요구된다면, 교류기는 동작 전압의 배수, 예를 들어 해당 부하를 갖는 최고 엔진 RPM에서 해당 전압의 10배, 예를 들어 180V를 제공할 것이다.
정류 및 조정 회로(102)는 교류기(101)로부터의 AC 출력 신호를 정류, 즉 DC 신호로 변환하고, 해당 신호의 전압을 조정, 즉 신호의 전압 레벨을 소정 범위 값들 내, 예를 들어 180V±2%로 유지한다. 정류 및 조정 시스템(102)은 교류기(101)에 의해 제공된 3상 AC 신호들의 범위의 적절하게 조정된 DC 신호(VO)를 제공할 수 있는 임의의 시스템을 포함할 수 있다. 예를 들어, 시스템(102)은 (설명되는 바와 같이 스위칭 손실 제어를 적절하게 사용하고) 듀티 사이클의 위상 각도 제어를 구비한 SCR 브리지를 포함할 수 있다. 그러나, 시스템(102)은 레귤레이터(400), 바람직하게는 부스트형 레귤레이터와 협력하는 정류기/제한기(limiter)(200)를 바람직하게 포함한다. 정류기/제한기(200)는 크게 변화하는 교류기(101)의 출력을 정류할 수 있으며, 그의 출력을 소정의 값으로 제한하고, (교류기 출력과 비교하여) 레귤레이터(400)로의 입력 신호 VO의 변동 범위를 감소시킬 수 있는 임의의 회로를 포함할 수 있다. 예를 들면, 정류기/제한기(200)는 상술한 바와 같은 SCR 브리지에 의해 구현될 수 있다. 그러나, 바람직한 실시예는 교류기 출력 및/또는 정류기/제한기의 출력에 따라 풀 웨이브 정류, 풀 듀티 사이클 해프 웨이브 정류, 또는 펄스 폭 변조된 해프 웨이브 정류 모드들에서 선택적으로 동작할 수 있으며, 그의 출력을 시스템(102)의 소정의 출력 값, 예를 들어 170V의 약간 이하로 제한하는 멀티모드 정류기/제한기(200)를 채용한다. 일부 예들에서, 사실상 시스템이 풀 웨이브 정류와 해프 웨이브 정류 모드 사이에서 혼란되는, 풀 웨이브 정류와 해프 웨이브 정류 사이의 동작의 전이 모드인 것을 포함하는 것이 바람직할 수 있다. 더욱 구체적으로는, RPM의 임의의 범위 내에서, 어떤 부하 조건들하에서는, 풀 웨이브 정류는 원하는 레벨을 초과하는 출력 레벨을 발생시킬 수 있다. 그러나, 해프 웨이브 정류는 그 환경에서 충분한 파워 출력을 제공할 수 없을 수도 있다. 이 경우들을 수용하기 위해서는, 어떤 RPM 및 부하 조건들에 직면하는 경우에, 해프 웨이브 정류와 풀 웨이브 정류 사이의 디더링(dithering)이 수행되어, 회로(200)의 출력 전압 (및 출력 파워)이 효과적으로 두 모드들에서의 파라미터의 시간 평균이 되도록 한다. 해프 웨이브 정류 및 풀 웨이브 정류의 상대적 시간 주기들은 원하는 출력을 결정한다. 정류기/제한기(200)의 바람직한 실시예가 도 2에 도시된다. 이러한 정류기/제한기(200)의 각각의 컴포넌트들의 바람직한 실시예는 도 3에 도시되어 있다.
정류기/제한기(200)의 출력을 받아들이는 레귤레이터(400)는 소정의 레벨, 예를 들어, 180V±2%에서 일정한 전압 출력 VRO을 제공한다. 레귤레이터(400)는 바람직하게는 부스트형 레귤레이터이다. 부스트형 레귤레이터를 사용하는 것은 여러가지 면에서 유용하다. 이것은 매우 단순하며(트랜스포머의 필요성을 피함), 효과적이며, 크기 조정가능하다. 레귤레이터(400)로의 입력이 소정의 최대값에 접근하는 경우에(예를 들어, 도로 속도에 대응하는 RPM에서), 부스트는 본질적으로 비활성이고, 적은 에너지를 소모하며, 열을 적게 발생시킨다. 또한, 부스트형 토폴로지는 단락 회로의 경우에 전류를 고유하게 제한한다. 부스트 타입 레귤레이터(400)의 바람직한 실시예를 도 4에 도시한다. 이 부스트 타입 레귤레이터(400)의 각 컴포넌트들의 바람직한 실시예들이 도 5에 도시되어 있다.
DC-DC 변환기들(106)은 상대적으로 높은 전압 출력의 정류 및 조정 시스템으로부터, 원하는 레벨의 출력 전압(들), 예를 들어, 12, 24, 또는 42 볼트 또는 그외의 원하는 DC 전압을 유도한다. DC-DC 변환기들(106)은 예를 들면, 스위치 모드의 풀 브리지(full bridge), 해프 브리지(half bridge), 푸시 풀(push pull), 플라이백(fly back), 포워드 변환기, 또는 백 부스트 변환기와 같은 임의의 적절한 토폴로지를 사용하여 구현될 수 있다. DC-DC 변환기(106)는 종래의 풀 브리지의 펄스 폭 변조된 전압 강하 토폴로지를 사용하여 구현된다. DC-DC 변환기(106)의 바람직한 실시예가 도 6에 도시되어 있다. 이 부스트형 레귤레이터(400)의 각각의 컴포넌트들의 바람직한 실시예들이 도 7에 도시되어 있다.
DC-AC 인버터(108)는 정류 및 조정 시스템(102)(예를 들어, 레귤레이터(400))의 출력으로부터 예를 들어 120 volts RMS 50/60 Hz의 원하는 전압 및 파형 의 AC 출력 신호를 생성한다. 일반적으로, 적절한 인버터 브리지는 "하이측" 및 "로우측" 스위칭 장치들의 각 쌍들을 포함한다. 한 쌍은 AC 사이클의 포지티브 반쪽과 연관되어 있으며, 다른 쪽은 AC 사이클의 네거티브 반쪽과 연관되어 있다. 각 쌍의 스위칭 장치는 조정 DC 레일, 즉 정류기 및 레귤레이터 시스템(102)의 출력과, 공통 접지 사이의 적절한 출력 필터와 직렬로 접속되어 있으며, 하이측 스위치는 포지티브 레일과 출력 필터 사이에 접속되어 있으며, 로우측 스위치는 출력 필터와 공통 접지 사이에 접속되어 있다. 참조가 용이하도록, 순간 해프 사이클과 연관된 스위치들의 쌍은 이하에서 종종 "프라이머리(primary)" 스위치로 지칭될 것이며, 다른 반쪽 사이클과 연관된 스위치들의 쌍은 이하에서 상보 스위치라고 지칭될 것이다. 일반적으로, 원하는 주파수의 한 반쪽 사이클(180°)에 대응하는 기간 동안 상호 폐쇄적인 방식으로 스위칭 장치들의 제1 쌍(예를 들어, 포지티브 해프 사이클과 관련된 스위치)을, 그 다음에는 스위칭 장치들의 제2 쌍(예를 들어, 네거티브 해프 사이클과 관련된 스위치)을 순환적으로 도통되게 함으로써 AC 신호가 생성된다. 이것은 본질적으로 사각파 형상을 발생시키고, 이것은 출력 필터에 의해 스무딩된다. 통상적으로, 프라이머리 스위치를 통한 전류를 펄스 폭 변조하는 것에 의해 사인파에 더 잘 접근하기 위한 파 정형이 달성된다. 일부 예들에서는, 프라이머리 스위치들을 통한 펄스들 사이의 "사장 시간(dead time)"의 적어도 일부분 중에 보완 스위치들 중 적어도 하나를 통해 출력 필터에 대해 방전 경로를 제공함으로써 파 정형을 더욱 용이하게 할 수 있다.
바람직한 실시예에서, 인버터(108)는, 전체적인 절반 사이클 동안 AC 사이클 의 순간 반쪽과 연관된 쌍의 하이측 스위치를 "온"으로 유지하고 하부(접지측) 스위치를 변조함으로써, 소정의 주파수 및 파 형상, 예를 들어 60 hertz의 사인파를 갖는 출력 신호를 생성하며, (쌍의 양쪽 스위치들을 변조하는 것과는 대립하는 것으로,) 부하(전류 유도)가 소정의 레벨 미만인 경우에는(그러나 부하가 그 레벨에 도달하거나 초과한 것은 아님), 프라이머리 스위치의 로우측과 상호 폐쇄적인 방식으로 보완 쌍의 하이측을 턴온하여 인버터 필터 인덕터 및 커패시터를 리셋하는 것을 확실하게 한다. 이러한 바람직한 인버터(108)가 도 8에 도시되어 있고, 도 9에는 파형이 도시되어 있다. 인버터(108)의 각 컴포넌트들의 바람직한 실시예들은 도 10에 도시되어 있다.
더 논의될 바와 같이, 정류기/제한기(200), 레귤레이터(400), DC-DC 변환기(106) 및 인버터(108) 내에 바람직하게 제공을 행하여, 시스템을 가로지르는 전압, 및 시스템을 통해 흐르는 전류의 변화 속도, 시스템에 이용되는 파워 스위치들을 제한하여, 다른 방법으로 열로서 분산되는 스위칭 에너지를 최소화하고, 바람직하게는 그 스위칭 에너지를 되찾아 그것을 부하에 보낸다.
정류기/제한기(200)
전술한 바와 같이, 정류기/제한기(200)는 크게 변화하는 교류기(101)의 출력을 정류할 수 있고, 그 출력을 소정의 값으로 제한할 수 있는 임의의 회로를 포함할 수 있다. 그러나, 바람직하게는, 정류기/제한기(200)는 교류기 출력 및/또는 정류기/제한기(200)의 출력에 따라 풀 웨이브(full wave) 정류, 전체 듀티 사이클 해프 웨이브 정류, 풀 웨이브와 전체 듀티 사이클 해프 웨이브 정류 사이의 과도기 적 디더링(transitional dithering), 또는 펄스 폭 변조된 해프 웨이브 정류 모드들에서 선택적으로 동작하는 멀티-모드 회로를 포함한다. 일반적으로, 풀 웨이브 정류가 가장 효과적이며, 따라서 풀 웨이브 정류가 소정의 최대 출력 레벨, 예를 들어 170 볼트를 초과하여 전압을 생성할 때를 제외하고는, 그 모드에서 동작하는 것이 바람직하다. 이제 설명되어질 바와 같이, 풀 웨이브 정류와 해프 웨이브 정류 사이에서 동작 모드가 스위칭되는 지점은 실제 정류 모드에 관계 없이 순간 RPM 및 부하 조건들 하에서 풀 웨이브 정류에 의해 생성되는 출력을 나타내는 표시 신호(V_SNS)에 기초하여 결정된다. 이제 설명될 바와 같이, 표시 신호 V_SNS는, 해프 웨이브 정류 모드 동작 중에 교류기를 지나는 증가된 IR 강하가 표시 신호에 있어서의 감소된 전압으로서 반영되는 경우를 제외하면, 순간 RPM 및 부하 조건들 하에서 (실제 정류 모드에는 상관 없이) 교류기 출력의 풀 웨이브 정류에 의해 생성된 출력 전압 레벨에 적절하게 직접적으로 비례한다. 해프 웨이브 정류 신호의 펄스 폭 변조가 개시되는 지점은 정류기/제한기 출력을 모니터링함으로써 결정된다.
정류기/제한기(200)는 기동하면, 초기에 풀 웨이브 정류 모드에서 동작한다. 정류기/제한기(200)가 풀 웨이브 정류 모드에 있을 때 해프 웨이브 정류로의 스위칭을 행하고, 표시 신호 V_SNS가 정류기/제한기(200)의 최대 소망 출력에 대응하는 소정의 레벨(FULL_UPPER_LIMIT)을 초과할 때 정류기/제한기(200)의 출력을 최대 레벨 이하로 유지한다. 정류기/제한기(200)가 해프 웨이브 정류 모드에 있을 때 풀 웨이브 정류로의 스위칭을 행하고, 표시 신호 V_SNS가 정류기/제한기(200)의 최대 소망 출력과 동일하거나 바람직하게는 그보다 약간 작은 전압에 대응하는 소정의 낮은 임계 레벨(HALF_LOWER_LIMIT) 이하로 강하될 때 풀 웨이브 정류가 다시 한번 원하는 한계 내에서 출력을 발생시킬 것이라는 것을 나타낸다. 한편, 정류기/제한기(200)가 해프 웨이브 정류 모드에 있고, 정류기/제한기(200)의 출력이 최대 소망 출력 레벨에 도달하면, 펄스 폭 변조를 개시하여 최대 레벨이 초과하는 것을 방지한다. 풀 웨이브 정류와 해프 웨이브 정류 모드 사이에서 전이가 행해지는 경우 디더링이 발생하고, 해프 웨이브 정류가 HALF_LOWER_LIMIT 보다 작은 표시 신호 V_SNS의 값을 발생시키거나 또는 풀 웨이브 정류가 FULL_UPPER_LIMIT보다 큰 표시 신호 V_SNS 의 값을 발생시킨다. 디더링 동작 중에, 정류기/제한기(200)의 출력은 효과적으로, 풀 웨이브 정류와 해프 웨이브 정류의 연속 사이클의 순간 출력의 시간 평균이며, 따라서 원하는 한계 내에서 출력 신호를 제공한다. 디더링이 발생하는 조건들의 대역은 상부와 하부 임계값들 사이의 차이에 의해 결정된다.
대안적으로, (펄스 폭 변조의 시작뿐만 아니라) 풀 웨이브 정류와 해프 웨이브 정류 사이에 동작 모드가 스위칭되는 포인트들은 정류기/제한기(200)의 출력 VO를 감시함으로써 결정될 수 있다. 도 2A를 간단하게 참조하면, 정류기/제한기(200)는 처음에 풀 웨이브 정류 모드에서 동작한다. RPM이 증가함에 따라(부하는 일정하다고 가정함), 정류기/제한기(200)의 출력 전압(예를 들어, 일반적으로 도 2A에서 260으로 표시됨)은 비례하여 증가한다. 정류기/제한기(200)는, 사실상, 정류기/제한기(200)의 원하는 최대 출력값에 대응하는 소정의 한계, 예를 들어, 170V에 도달할 때까지, 풀 웨이브 정류 모드에서 유지된다. 최대값은, 예를 들어, 속도가 대략적으로 유휴 RPM의 소정 배수, 예를 들어, 유휴 속도의 2.5배로 증가한 경우에 도달된다. 출력 VO가 (상위 임계값 FULL_UPPER_LIMIT를 초과하는 표시(indicia) 신호 V_SNS에 대응하는) 원하는 최대 레벨을 초과했을 때(예를 들어, 도 2A의 포인트(262)), 정류기/제한기(200)는 해프 웨이브 정류 모드(처음에 풀 듀티 사이클을 가짐)로 스위칭된다. 해프 웨이브 정류(풀 듀티 사이클)로의 스위칭은, 부하(전류 흐름) 상태들에 따라, 약 50% 내지 60%의 인수만큼 출력 전압 VO를 효과적으로 감소시킨다(부하가 클수록 드롭이 크다). 디더링(dithering) 상태가 아니라고 가정하면(예를 들어, 해프 웨이브 정류 출력 전압 VO는, 처음에 스위칭되면, HALF_LOWER_LIMIT에 대응하는 하위 임계 레벨보다 크다고 가정하면), RPM이 계속하여 증가함에 따라, 정류기/제한기(200)는, 정류기/제한기(200)의 출력 전압이, 정류기/제한기(200)의 해프 웨이브 정류된 출력의 펄스 폭 변조가 그 출력을 소정 레벨로 제한하도록 달성되는 소정 레벨, 바람직하게는, 원하는 최대 출력값(도 2A의 포인트(266))에 도달할 때까지 계속해서 풀 듀티 사이클의 해프 웨이브 정류 모드에서 동작할 것이다. 한편, 정류기/제한기(200)가 해프 웨이브 정류 모듈에서 동작하고 있을 때, 출력 VO가 (HALF_LOWER_LIMIT에 대응하는) 하위 임계값 아래로 강하되는 포인트로 RPM이 감소(또는 부하가 증가)하는 경우, 풀 웨이브 정류 동작이 재개된다.
도 2B를 간단하게 참조하면, 풀 웨이브 정류 모드와 해프 웨이브 정류 모드 사이에 변환이 이루어지는 경우에, 해프 웨이브 정류에 의해 출력 VO가 (HALF_LOWER_LIMIT에 대응하는) 하위 임계 레벨(도 2B의 포인트(268)) 아래로 강하되거나, 또는 풀 웨이브 정류에 의해 출력 VO가 (FULL_UPPER_LIMIT에 대응하는) 원 하는 최대 레벨(예를 들어, 도 2B의 포인트(270))보다 높아지면, 정류기/제한기(200)는 디더링 모드에서 적절하게 동작함으로써, 정류기/제한기(200)의 시간 평균 출력이 원하는 한계내에 있도록 풀 웨이브 저유와 해프 웨이브 정류 사이에서 스위칭한다. 정류기/제한기(200)는 통상적으로, 해프 웨이브 정류 모드 동작이 (HALF_LOWER_LIMIT에 대응하는) 하위 임계 레벨을 초과하여 전압을 생성하는 포인트로 RPM이 증가(또는 부하가 감소)하거나, 또는 풀 웨이브 정류 모드 동작이 (FULL_UPPER_LIMIT에 대응하는) 원하는 최대 레벨보다 작거나 같은 전압을 생성하는 포인트로 RPM이 감소(또는 부하가 증가)할 때까지, 계속해서 디더링 모드에서 동작한다.
도 2C를 참조하면, 정류기/제한기(200)는 바람직하게는 적절한 버퍼 및 드라이버 회로(206)와 협력하는 정류기 브리지 회로(202); 적절한 비교기 및 PWM 드라이브 생성기(216A)와 분리 경계 (버퍼) 회로(216B)와 협력하는 해프 브리지 변환 회로(203); 제로 크로싱(zero crossing) 검출기 회로(213); 마이크로프로세서 컨트롤(214); 분리형 전원 전압원(215); 전압 감지 분리 회로(217); 및 저전압 전원공급장치(218)를 포함한다. 정류기/제한기(200)는 바람직하게는 또한 스위칭 손실 감소 회로(204)를 포함하며, 필요에 따라, 전류 감지 회로(212)를 또한 포함한다.
정류기 브리지 회로(202)는, (버퍼 및 드라이버 회로(206)에 의해 결정되는 바와 같이) 마이크로프로세서 컨트롤(214)로부터의 제어 신호 SCR_DRV에 응답하여 활성화되면, 교류기(101)로부터의 3-상 AC 신호의 풀 웨이브 정류를 제공함으로써, 단자(+VO)와 공통 접지(-VO) 사이에서 DC 신호 VO를 생성한다. 정류기 브리지 회 로(202)는 적절하게는 각각의 AC 위상과 연관된 각각의 병렬 레그(leg)를 포함하고, 각각의 레그는 직렬 연결된 "상부" 다이오드와 "하부" (접지측) 전원 스위치, 예를 들어, SCR를 포함하며, 연관된 교류기 위상은 SCR과 다이오드의 접합점(juncture)에 연결된다. 기재된 바와 같이, SCR들은 풀 웨이브 정류 모드 동작 동안에 인에이블(enable)되고, 해프 웨이브 정류 모드 동작(풀 듀티 사이클과 PWM 둘다) 동안에 디스에이블(disable)된다. 정류기 브리지 회로(202)의 바람직한 실시예가 도 3a에 도시된다.
버퍼 및 드라이버 회로(206)는 마이크로프로세서 컨트롤(214)로부터 SCR_DRV 제어 신호를 수신하고, 응답하여 정류기 브리지 회로(202)의 소자들(예를 들어, SCR들)에의 적용을 위해 적절한 드라이브 신호들을 생성한다. 버퍼 및 드라이버 회로(206)의 바람직한 실시예가 도 3b에 도시된다.
해프 브리지 변환 회로(203)는, 활성화되면, SCR들을 디스에이블하여 회로(200)의 네거티브 출력 단자(-VO) 즉, 공통 접지를, 교류기 3-상 권선(windings)의 중성(neutral) 즉, 제2 플로팅(floating) 접지에 선택적으로 연결함으로써, 정류기 브리지 회로(212)를 해프 웨이브 정류기로 효과적으로 변환한다. 해프 브리지 변환 회로(203)는 적절하게는 비교기 및 PWM 드라이브 생성기(216A)와 분리형 드라이버(216B)와 협력하는 하나 이상의 다이오드(220) 및 전원 스위치(222)(예를 들어, FET)를 포함한다. 다이오드들(220) 및 전원 스위치들(222)은 회로(200)의 네거티브 출력 단자(-VO)와 교류기 권선의 중성 사이에 선택적인 접속을 제공한다. 회로(200)의 네거티브 출력(-VO)(공통 접지)이 교류기(101) 권선의 중성(제2 플로팅 접 지)에 접속된 경우, 전류는 교류기 AC 사이클의 포지티브 해프 동안에만 흐른다. 해프 브리지 변환 회로(203)(및 드라이버(216B))의 바람직한 실시예가 도 3c에 도시된다.
비교기 및 PWM 구동 발생기(216A)는, 마이크로프로세서 제어기(214)로부터의 제어 신호 FET_ENB(SCR_DRV와 상호 배타적임)에 의해 인에이블되면, 분리 경계(버퍼) 회로(216B)와 협력하여 적절한 구동 신호들을 전원 스위치들(222)에 제공하고, 출력 전압 VO의 펄스 폭 변조를 선택적으로 실행시켜 전압을 소정의 최대 출력 레벨(예를 들어, 170 볼트)로 제한한다. 특히, 비교기 및 PWM 구동 발생기(216A)는, 마이크로프로세서 제어기(214)로부터의 제어 신호 FET_ENB에 의해 활성화되면, 정류기/제한기(200)의 출력 전압 VO를 모니터링하고 정류기/제한기(200)의 출력 전압 VO에 따라 해프 브리지 변환 회로의 제어를 실행시키기 위해 펄스폭 변조된 제어 신호 FET_DRV를 생성한다. 펄스폭 변조된 제어 신호 FET_DRV의 듀티 사이클은 정류기/제한기(200)의 출력에 따라 제어되는데, 예를 들어, 그에 반비례하며; 듀티 사이클은 초기에 100%이고 정류기/제한기(200)의 해프 웨이브 정류 모드 출력이 소정의 최대값, 예를 들어 170 볼트를 초과할 때까지 그 값을 유지하고, 이 때의 듀티 사이클은 출력을 소정값으로 제한하도록 조정된다. PWM 구동 발생기(216A)의 바람직한 실시예는 도 3D에 도시된다.
분리 경계(버퍼 구동기) 회로(216B)는, FET_DRV 신호에 응답하여, 적절한 전압 및 분리(기준 접지)의 신호를 발생하여 해프 웨이브 정류기의 FET들을 구동시킨다. 상술된 바와 같이, 분리 경계 회로(216B)의 바람직한 실시예는 도 3C에 도시 된다.
교류기(101)로부터의 개별적인 위상들을 수신하는 분리된 전압원(215)은 제2 부유 접지 및 공통 접지로부터 분리되는 제1 부유 접지(아래쪽으로 연장하는 이격되어 각을 이루는 선들을 갖는 수평선으로 지정됨)에 관하여 출력 단자 +PS에서의 분리된, 비규칙적인 풀 웨이브 정류된 DC 전압 PS를 제공한다. 분리된 전압원(215)은 적절하게는 종래의 다이오드 정류기 풀 브리지(full bridge)를 포함한다. 전압 PS는, 해프 웨이브 정류 모드 동작 동안 교류기(101)에서 발생되는 증가된 IR 드롭이 전압 PS의 감소로서 반영되는 것을 제외하고는, 순간적인 RPM 및 부하 조건들(실제 정류 모드와 관계 없음) 하에서 교류기 출력의 풀 웨이브 정류에 의해 발생될 출력 전압 레벨에 직접 비례한다. 분리된 전압원(215)의 바람직한 실시예는 도 3E에 도시된다. 분리된 출력 전압 PS는 전압 감지 분리 회로(217) 및 저전압 전원 공급 회로(218)에 인가된다.
전압 감지 분리 회로(217)는, 분리된 전압원(215)과 협력하여, 전압 PS(이에 따라 순간적인 RPM 및 부하 조건들 하에서 교류기 출력의 풀 웨이브 정류에 의해 발생되는 출력 전압 레벨)를 나타내는 표시 신호 V_SNS를 도출하지만, 마이크로프로세서(214)에 입력 신호로서 제공하기에 적합하도록 조건이 설정되고 레벨 시프트되었다. 전압 감지 분리 회로(217)의 바람직한 실시예는 도 3F에 도시된다.
저전압 전원 공급 회로(218)는 시스템(102)의 각종 제어 컴포넌트들의 전원 공급을 위해, 바람직하게는 비제한 전압 +PS로부터 그러한 신호들을 도출하기 위해 다수의 분리된 저전압 공급기들을 제공한다. 회로(218)는 공통, 및 제1 및 제2 부 유 접지들 각각에 관하여, 소정의 전압, 예를 들어 15 볼트로 각각의 조절된 신호들을 생성하는 것이 바람직하다. 저전압 전원 공급 회로(218)의 바람직한 실시예는 도 3G에 도시된다.
제로 크로싱 검출기(213)는 교류기 위상들 중 하나, 예를 들어 위상 A(PH_A)를 수신하여, 위상의 제로 크로싱을 나타내는 출력 신호(ZC), 그리고 이에 따라 RPM을 생성한다. 제로 크로싱 신호 ZC는 입력으로서 마이크로프로세서 제어기(214)에 제공된다. 제로 크로싱 검출기(213)의 바람직한 실시예는 도 3H에 도시된다.
전류 감지 회로(212)는 교류기(101)에 의해 산출되는 전류의 크기를 나타내는 전류 감지 신호, I_SNS를 생성한다. 전류 감지 신호 I_SNS는 아날로그 입력으로서 마이크로프로세서(214)에 제공된다. 전류 감지 회로(212)의 바람직한 실시예는 도 3I에 도시된다.
마이크로프로세서 제어기(214)는 풀 웨이브 출력 표시 신호 V_SNS, 제로 크로싱 신호 ZC 및 원한다면, 전류 감지 신호 I_SNS에 응답하여, 제어 신호들을 선택적으로 생성하는데, SCR_DRV를 생성하여 풀 웨이브 정류 모드 동작을 실행시키고, FET_ENB를 생성하여 해프 웨이브 정류 모드를 실행시킨다. 시스템(102)의 다중모드 동작에 진입하기 전에, 엔진 구동 교류기(101)가 예를 들어 스타터 모터에 의해 크랭크(crank)되는 것에 대립하는 것으로서, 자신의 전원으로 운영된다고 하는 초기 결정이 제공될 수 있다. 실제로, 교류기 위상들 중 하나에서의 제로 크로싱들 사이의 주기를 반영한 RPM은 다중모드 동작을 개시하기 전에 모터가 소정의 기간동안 아이들(idle) 속도 또는 그 이상에서 동작하는 것을 보장하도록 모니터링된다.
마이크로프로세서 제어기(214)의 바람직한 실시예는 도 3J에 도시된다. 제어기(214)는 이하를 포함하도록 구성된 마이크로칩 PIC18242 마이크로컨트롤러를 포함하는 것이 적합하다.
타이머 0(TMR0) 내부 클럭에 의해 구동되는 8비트 카운터로 구성됨. 타이머값은 고정 시간 기반, 예를 들어 100us에서 타이머 0으로부터의 인터럽트 이벤트를 생성하도록 각 롤오버(rollover)에 재로딩된다.
타이머 1(TMR1) 내부 클럭에 의해 구동되는 16비트 카운터로 구성됨. 타이머값을 사용하여 교류기로부터의 연속적인 제로 크로싱들의 주기를 측정한다. 타이머 1로부터의 인터럽트는 롤오버에게 연속적인 제로 크로싱들 사이의 시간이 너무 길고 RPM이 너무 낮은 것을 나타내도록 지시한다.
외부 인터럽트 0(INT0은 이벤트명이다) 인터럽트는 INT0 핀(제로 크로싱 검출기(213)로부터 제로 크로싱 신호 ZC를 수신함)이 하이가 되는 경우 트리거된다.
파일(RAM) 포인터: 파일(RAM) 공간 데이터의 액세스를 위한 12비트 포인터. 이 하드웨어 포인터는 RAM를 클리어(clear)하고 내역을 아날로그 스레드(thread)에 저장하는데 사용된다.
아날로그-디지털 변환기: 이 하드웨어 모듈은 선택된 입력 채널(V_SNS, I_SNS)로부터 판독하여 8비트 또는 10비트 결과를 저장한다. 선택된 채널은 제어 레지스터 ADCON0 비트 5, 4 및 3에 의해 제어된다.
3개의 입력/출력 포트: 디지털만을 위한 2개의 8비트 포트 및 디지털 또는 아날로그 또는 양자의 혼합일 수 있는 6비트 포트(PORTA). 포트 내의 각 비트는 디지털 입력 또는 출력으로서 구성될 수 있다. 6비트 포트(PORTA)는 또한 아날로그 입력을 수신하도록 구성될 수 있다. 이 경우, 디지털 출력들 SCR_DRV 및 FET_ENB는 포트 B 비트 RB6 및 RB7에서 발생된다.
마이크로프로세서(214)에 의해 실행되는 프로그램의 흐름도가 도 10A-K에 제공되어 있다. 일반적으로, 프로그램은 통상의 초기화(normal initialization), 스타트업(start-up) 및 "메인 루프" 시퀀스들로 구성된다.
시스템(102)의 멀티모드 동작에 진입하기 전에, 엔진 구동 교류기(engine driving alternator)(101)가, 예컨대, 스타터 모터(starter motor)에 의해 시동(crank)되는 것과 반대로, 그 자체의 전력으로 가동하고 있다는 초기의 판정이 제공될 수 있다.
"스타트업" 시퀀스는 시스템이 전력을 끌어내기 전에 엔진 구동 교류기(101)가 업 투 스피드(up to speed)하여 그 자체의 전력으로 가동하도록 하기 위해 채용된다. 시작하려고 하는 엔진으로부터 전력을 끌어내는 것은 바람직하지 않다. 따라서, 통상의 초기화 시퀀스 후에, "스타트업" 시퀀스는, 사실상, 메인 시퀀스로 전진하기 전에 통상의 스피드 동작의 소정의 기간(특정 수 아래의 제로 크로싱 기간들의 소정 수의 연속적인 측정)을 검출한다. 만일 특정 수보다 큰 기간이 검출되면, 카운트는 다시 시작된다. 따라서, 업 투 스피드가 된 다음 머뭇거리는 엔진은 전력의 끌어내기(draw of power)를 트리거하지 않을 것이다. 엔진이 "업 투 스피드"(up-to-speed)되었다고 판정된 후에, SCR_DRV 신호가 발생되어(SCR_DRV = 1 및 FET_ENB = 0) 풀 브리지(202)를 인에이블하고 초기 풀 웨이브 정류(initial full wave rectification)를 일으킨다.
그 후 메인 루프 시퀀스가 개시된다. 메인 루프는 전압 표시 신호(V_SNS)를 모니터하고, 제어 신호들 SCR_DRV 및 FET_ENB를 선택적으로 발생시켜 풀 웨이브 정류 모드 및 해프 웨이브 정류 모드 간에 스위칭한다. 모드들 간의 스위칭 시에, 교류기 권선의 단락을 피하기 위해 "브레이크 비포 메이크"(break before make)가 채용된다. 이 기능은 "스레드"(thread)로서 적당히 구현된다. 스레드는 각각이 태스크를 수행한 다음 복귀(return)하는 각각의 작은 코드들(상태)(small pieces of code)로 이루어진다. 스레드가 다시 호출될 때 어느 상태가 다음에 실행될 것인지를 각각의 상태에서 판정하는 것을 통하여 링크된 시퀀싱(linked sequencing)이 제공된다. 일반적으로 스레드는 전체 기능을 완료하기 위하여 수 회 호출되어야 한다. 메인 루프는 3개의 주요 호출을 포함한다:
GetAnalogInputs: 아날로그 입력들(V_SNS, I_SNS)을 취득하고, 각각의 결과를 버퍼에 저장하고 각 버퍼의 평균을 계산한다. 아날로그 입력들은 시간 기반(100 us)마다 모니터된다. 프로세스가 완료되면, 플래그가 세트된다.
BridgeControl: 아날로그 채널들이 판독되고, 버퍼링되고 평균 계산되었음을 나타내는 플래그를 체크한 다음, 그 판독들에 기초하여 브리지 모드의 변경이 필요한지 여부를 판정한다. 만일 현재 모드가 풀 웨이브 정류라면, V_SNS가 상한(FULL_UPPER_LIMIT)보다 큰지 여부가 테스트된다. 만일 현재 모드가 해프 웨이브 정류라면, V__SNS가 하한(HALFL_LOWER_LIMIT)보다 작은지 여부가 테스트된다. 만 일 변경이 표시되면, 브리지 모드를 변경하는 시퀀스가 표시되고 제어는 스레드 루프로 복귀된다. 스레드에의 후속 호출들은 지연들(delays) 동안 계속해서 기다리거나 또는 지연이 완료되면 모드 변경을 끝낸다.
UpdatePeriodBuffer: 새로운 제로 크로싱 측정을 위해 플래그를 체크한다. 또 다른 플래그를 테스트하여 기간이 "너무 낮았는지"(too low)를 확인하고, 만일 그렇다면, 단지 복귀하여 그 판독에 대해 아무것도 하지 않는다. 순환 버퍼(circular buffer)에 새로운 기간을 넣는다. 버퍼의 평균을 계산하고 그 결과를 'avg_period'에 저장한다.
또한, 몇몇 "지원" 기능들이 채용된다:
InitCpuRam: 제어 레지스터들을 초기화하고 모든 사용된 RAM을 소거한다.
InitSpecialVals: 이 프로그램에 특정한 변수들 및 레지스터들을 셋업한다.
WriteHistory: 아날로그 스레드에 의해, 아날로그 히스토리 어레이 내의 적당한 위치에 아날로그 결과를 저장하는 데 이용된다.
CalcADHistAvg: 아날로그 스레드에 의해, 단일 채널에 대해 사용된 아날로그 히스토리 어레이의 부분의 평균을 계산하는 데 이용된다.
스위칭 손실 감소 회로(204)
해프 브리지 변환 회로(203)와 같은 전력 스위치들을 채택한 고 전력 응용예에서, 스위칭 손실, 즉 스위칭 동작 동안에 일어나는 IR 손실이 심각한 문제가 될 수 있다. 어림잡아, 특별한 보완책을 취하지 않은 경우에는, 입력 전기 에너지 중의 대략 10 %가 열 형태로 손실될 수 있다. 따라서, 10 ㎾ 전력 변환에 대해서, 1 ㎾의 에너지가 열 형태로 손실될 수 있다. 이런 열은, 전력 스위치뿐만이 아니라 시스템의 그외의 전자적 부품들에 대한 나쁜 영향, 즉 신뢰성 감소를 가져올 수 있다. 또한, 전이 동안에, 스위칭 장치의 양단에 걸린 전압의 급격한 변화 및/또는 스위칭 장치를 통과하는 전류의 급격한 변화는 무선 주파수 방출, 즉 간섭을 일으키게 마련이다
일반적으로, FET와 같은 전력 스위칭 장치는, 완전 도통의 '온' 상태(여기서 장치의 저항은 미미함)로부터 완전 비도통 '오프' 상태(여기서 장치의 저항은 실효적으로 무한임)로 변화하는 데에 유한한 시간, 예를 들어 500 나노초(여기서 '턴오프 기간(turn-off period)'으로 지칭됨)가 걸린다. 이 턴오프 기간에, 장치의 저항은 미미한 값으로부터 실효적인 무한대 값까지 점진적으로 변화한다. 저항이 충분한 레벨에 도달할 때까지는, 전류가 장치를 통해 흐르기를 계속하여 IR 손실을 일으킨다.
일반적으로, FET 전력 스위치에 의해 시현되는 저항은 그 게이트에 가해지는 구동 신호의 전압 레벨의 함수이다. 예를 들어, 도3L을 참조하면, 이런 장치는, 소정 전압, 예로 15 볼트의 또는 그 이상의 전압의 구동 신호들에 의해 '온(on)' 상태 즉 완전 도통(예로, R≒0)한 것으로 되고, 제2 소정 전압, 예를 들어 제로 볼트의 또는 그 이하의 전압의 구동 신호에 의해 '오프(off)' 즉 완전 비도통(저항은 실효적으로 무한, 즉 R≒4 ㏁ 이상)한 것으로 된다. '온' 일 때, 이 장치는 비교적 높은 레벨, 즉 100 A로 도통한다. 그러나, 장치의 저항은 미미하여서 장치 양단 간에서의 전압 강하는 근본적으로 제로이다. 장치가 '오프' 일 때, 비교적 높은 레벨의 전압이 장치 양단 간에 나타난다. 그러나, 실제로 어떤 전류도 장치를 통해서 흐르지 않기 때문에, 근본적으로 어떤 IR 손실도 없다.
반면에, 중간 전압 크기의 구동 신호가 가해질 때 상당한 정도의 IR 손실이 일어날 수 있고, 이때 장치는 도통이지만 중간 크기의 저항을 나타낸다. 예를 들어, 스위치의 저항은, 각각 7 볼트 및 4 볼트의 구동 신호에 응답하여, Ω 정도의 제1 중간값과, ㏀ 정도의 제2의 더 큰 값을 갖는다. 이는 상당한 정도의 IR 손실을 낳게 마련이다. 예를 들어, 전형적인 동작 조건 하에서, 장치 저항이 ㏀ 의 범위, 예를 들어 구동 신호가 4 볼트 근방의 값을 갖는 경우에, 상당한 레벨의 전류, 예를 들어 50 A 정도의 전류가 장치를 통해서 흐른다. 이는 이 기간에 상당한 정도의 IR 손실, 예를 들어 2.5 ㎾의 손실과 맞먹는 결과를 가져온다. 이는, 스위칭 장치가 비교적 높은 주파수로, 예를 들어 펄스 폭 변조 방식으로 턴 온 및 오프할 때 특히 심각해진다. 따라서, IR 손실을 최소화하고자 하는 관점에서 볼 때, 턴오프 기간을 최소화하는 것이 바람직하다. 그러나, 최소의 턴오프 기간은 FET의 게이트 캐패시턴스에 의해 확립되는 경향이 있고, 높게 레이팅된 전력에 대해서, 낮은 온 저항(low on-resistance) 장치들은 수백(예로 500) 나노초 정도의 크기일 수 있다.
본 발명의 한 측면에 따라서, 스위치 턴오프 기간 동안에 전력 스위칭 장치의 양단 간의 전압의 변화율과 이를 통해 흐르는 전류의 변화율을 제어하고, 그렇지 않았더라면 전력 스위칭 시에 열로서 소모되었을, 전력 스위치를 턴오프 하는 동안에 발생되는 에너지를 최소화함으로써, 변환 효율이 증가되고, 전자기파 방사( 간섭)는 감소된다. 이 에너지는 양호하게는 포획되고, 궁극적으로는, 예를 들어 이를 부하(load) 쪽으로 포워딩함으로써 또는 전원까지 피드백함으로써, 부하에 가해진다. 이는, 이것이 턴오프 기간 동안에 방전되게 되도록 전력 스위치 양단에 걸쳐서 커패시터를 배치하고 스위치 양단에 걸친 전압의 변화율을 제한하고 이후 다음 차례의 연속하는 턴오프 기간이 개시되기까지 커패시터를 비손실적으로(non-dissipatively) 실질적으로 완전 방전된 상태까지 (양호하게는 궁극적으로 출력에 가해지도록) 선택적으로 방전함으로써, 성취될 수 있다. 턴오프 기간은 예를 들어 500 나노초 정도의 유한한 지속 시간을 갖는다. 따라서, 전압 변화율을 제한함으로써, 턴오프 기간 동안에 FET 양단에 걸리는 전압이 비교적 낮은 소정 레벨에 제한될 수 있다. 스위칭 손실을 실질적으로 감소시키면, 세 가지의 주요 이득이 생긴다: 더 높은 전력 변환 효율; 전력 스위치에서의 감소된 열 소모(및 그에 따른 더 높은 신뢰성); 및 감소된 전자기 간섭.
더 특정하게는, 커패시터는 전압 변화에 저항하고, 단지 점차적으로만 방전된다. 시간 구간(△t)에 대한, 커패시터 양단에 걸친 전압 변화(△V)는 캐패시턴스(C)와 시간 기간 동안의 전류(i)의 평균값에 따르는데, 즉 △V=[i×△t)/C)]가 된다. 따라서, FET의 드레인 및 소스에 걸쳐서 적합한 값의 캐패시턴스를 배정함으로써, FET의 턴오프 기간 동안에 FET의 드레인 및 소스 간에 걸리는 전압은 낮은 값에 유지될 수 있다. 커패시터의 값이 더 커질수록 턴오프 기간 동안 드레인과 소스 사이에 발현되는 전압은 더 낮아진다.(그러나, 캐패시턴스는 크지 않아서 연속된 턴오프 기간 사이에 방전되지 않도록 하는 것이 바람직하다.) 일반적으로, 캐패시턴스의 값은 턴오프 기간 동안 발현된 전압이 미리 결정된 값보다 낮고, 적합하게는 20V보다 낮고, 바람직하게는 10V나 그 이하로 선택되는 것이 바람직하다. 바람직한 실시예에서, 턴오프 기간 동안 발현된 전압은 10V로 제한된다. 턴오프 기간 동안 FET의 드레인과 소스 사이의 전압을 미리 결정된 값(Vds)으로 제한하기 위한 캐패시턴스(Cs)의 값은 FET를 통한 평균 전류(Iave)를 턴오프 기간의 시간(Toff)으로 곱하고 미리 결정된 전압(Vds)으로 나눈 값, 즉 Cs = [(Iave×Toff)/Vds]와 같다. 바람직한 실시예에서, 그러한 커패시터의 전형적인 값은 0.1㎌과 0.2㎌ 사이 범위이다. FET가 완전히 턴오프된 후, 또는 FET가 턴온된 때 그 다음 연속하는 기간 동안, 커패시터에 의해 획득되는 에너지, 즉 턴오프 기간 동안 커패시터 상에 발현된 전하는 커패시터를 비손실적으로 방전하는 인덕터로 방전되고, 궁극적으로 출력(순방향으로 공급됨)에 에너지를 인가하거나 또는 직접적인 소산없이 에너지를 효과적으로 리사이클하기 위해 입력 전원에 되공급된다. 바람직한 실시예에서, 전원 전압과 FET 스위칭 횟수는 인덕턴스 값 약 53μH에 의해 할당된 시간 내에 방전되는 커패시터 값들을 초래한다.
도 2c를 다시 참조하면, 바람직한 실시예에 있어서, 턴오프 기간 동안 전력 스위칭 장치(222)를 가로지른 전압과 그를 통한 전류의 변화율의 제어는 스위칭 손실 감소 회로(204)를 제어한다. 회로(204)는 적합한 드라이버 회로(247), 및 다이오드(248)와 연결된 다이오드(240), 커패시터(242), 인덕터(244), 및 스위칭 소자(246), 예를 들면 FET를 적합하게 포함한다. 다이오드(240)와 커패시터(242)는 스위칭 소자(222)에 걸쳐 접속된다.(예를 들어, FET 스위치에 대해, 다이오드(240)의 애노드는 FET의 드레인에 연결되고, 커패시터(242)는 다이오드의 캐소드와 FET 소스 사이에 배치된다.) 스위칭 소자(246)는 커패시터(242)에 걸쳐 인덕터(244)와 직렬로 접속된다. 다이오드(248)는 인덕터(244)와 출력 단자 +VO 사이의 방향성 전류 경로를 제공하도록 배치된다. 스위칭 소자(246)는 전력 스위치(222)와 동기적으로 적합하게 작동한다. 스위치들(246, 222)이 온될 때, 커패시터(242)는 인덕터(244)로 방전한다. 스위치들(246, 222)이 오프될 때, 두가지 일들이 본질적으로 동기적으로 발생하는데, 커패시터(242)가 충전하여, 스위치(222)를 가로지른 전압을 앞서 논의한 바와 같이 제어하고, 인덕터(244)가 그 극성을 유효하게 역전하고 그에 의해 순방향-바이어싱 다이오드(248)의 극성을 역전하여, 다이오드(248)를 통해 단자 +VO에 전류를 전달한다. 스위칭 손실 감소 회로(204)의 바람직한 실시예는 도 3k에 도시된다.
스위칭 손실 감소 회로들과 유사한 회로들이 레귤레이터(400), DC-DC 변환기(106), 및 인버터(108)의 전력 스위치들로 적합하게 채택될 수 있다.
레귤레이터(400)
앞서 살펴본 바와 같이, 레귤레이터(400)는 미리 결정된 레벨, 예를 들면 180V±2%의 정전압을 제공한다. 도 4를 참조하면, 레귤레이터(400)는 바람직하게 하나 이상의 부스트 스테이지들(404)과, 제어 회로(412)와, 바람직하게 스위칭 에너지 손실 감소 회로(410)(정류기/리미터 시스템(200)의 회로(204)와 유사함)를 포함하는 부스트 타입 레귤레이터이다. 부스트 스테이지(404)는 입력 커패시터(420), 인덕턴스(422), 부스트 다이오드(424), 전력 스위치(426), 및 관련 드라이버 회로(428)(제어 회로(412)로부터의 제어 신호에 응답함), 및 출력 스토리지 커패시터(432)를 적합하게 포함한다. 출력은 출력 단자들 +VRO와 -VRO(공통 접지)를 가로질러 제공된다.
정류기/리미터(200)으로부터의 입력 DC 전압 VO는, 레귤레이터(400)의 출력 VRO에서의 원하는 전압, 예를 들면 180V보다 낮은 예를 들면 170V 값으로 제한된다. 전력 스위치(426)가 (제어(412)로부터의 제어 신호 DRV에 응답하여) 턴온될 때, 인덕터(422)를 통한 전류 경로를 완성하여, 인덕터(422)가 에너지를 받도록 유발한다. 부스트 다이오드(424)는 역-바이어스된다. 전력 스위치(426)가 턴오프될 때, 인덕터(422)는 그의 극성을 유효하게 역전하고 그에 의해 순방향-바이어싱 다이오드(424)의 극성을 역전한다. 인덕터(422)는 다이오드(424)를 통해 전하 저장 커패시터(432)에 전류를 전달한다. 인덕터(422)를 가로지른 전압은 입력 전압 VO에 더해져서 출력 전압 VRO를 생성한다.
제어 회로(412)는 출력 전압을 감지하고, 그것을 기준 전압과 비교하고, 전력 스위치(426)의 턴온 및 오프 시간을 변화시켜, 그에 따라 스위치(426)에 대한 드라이브를 펄스 폭 변조함으로써 출력 전압 VRO를 조정한다. 부스트 레귤레이터(400)에 대한 입력 전압(정류기/리미터(200)로부터의 VO)이 증가함에 따라, 제어 회로(412)는 전력 스위치(426)가 온되는 시간량을 감소시킨다. 정류기/리미터(200)로부터의 입력 전압 VO가 그의 최대 한계, 예를 들면 170V일 때, 전력 스위치는 오프로 남고 본질적으로 모든 전력은 다이오드(424)를 통해 흐른다. 이것은 특별히 높은 전력 처리량 효율을 산출한다; 발생된 유일한 열은 다이오드(424)에 의해 소비된 것이다. 또한, 부스트 레귤레이터(400)는 단락의 발생시 전류를 본질적으로 제한한다.
또한, 턴오프 기간 동안 스위칭 장치(426)에 걸친 전압과 이를 통한 전류의 변화 속도를 제어하기 위해서 스위칭 손실 감소 회로(410)를 포함하고, 다른 경우에 열로서 손실되었을 파워 스위치를 턴오프하는 과정 중에 발생된 에너지를 최소화하고, 예를 들어, 부하(load)를 향해 이를 공급함으로써 이를 되찾아 부하에 (궁극적으로) 전달함으로써, 변환 효율은 증가되고, 전자기 방출(간섭)은 감소될 수 있다. 회로(410)는 다이오드(450), 커패시터(452), 인덕터(454), 스위칭 장치(456), 예를 들면, 적합한 드라이버 회로(458) 및 다이오드(460)와 함께 동작하는 FET을 적절하게 포함한다. 다이오드(450) 및 커패시터(452)는 스위칭 장치(426)(예를 들면, FET 스위치용, 다이오드(450)의 애노드는 FET의 드레인에 접속되고, 커패시터(452)는 다이오드의 캐소드와 FET 소스 사이에 위치함)를 거쳐 접속된다. 스위칭 장치(456)는 커패시터(452)를 거쳐 인덕터(454)와 직렬로 접속된다. 다이오드(460)는 인덕터(454)와 출력 단자 +VR0 사이에 방향성 전류 경로(directional current path)를 제공하도록 배치된다. 스위칭 장치(456)는 전력 스위치(426)와 동시에 적절하게 동작한다. 스위치들(426 및 456)이 온될 때, 커패시터(452)는 인덕터(454) 내로 방전한다. 스위치들(426 및 456)이 오프될 때, 커패시터(452)는 충전되고(회로(204)에 관련하여 전술한 바와 같이, 스위치(426)를 통해 전압을 제어함), 인덕터(454)는 효과적으로 그 극성을 반대로하며, 그로 인해 포워드 바이어싱 다이오드(460)가 되고, 다이오드(460)를 통해 단자 +VR0로 전류를 전달한다.
레귤레이터(400)의 바람직한 실시예는 복수의 부스트 스테이지들(404)을 적절하게 사용하며, 각 스테이지는 인덕터들과 스위치들의 각각의 쌍을 포함하고, 각 쌍은 상호 배타적 기초(mutually exclusive basis)에서 주기적으로(예를 들면, 50% 듀티 사이클) 동작한다. 각 쌍은 그들과 관련된 각각의 다이오드(450), 및 바람직하게는 커패시터(452)의 일부(커패시터(452)를 형성하기 위해 사용되어지는 패러렐 컴포넌트들)를 가질 것이다. 레귤레이터(400)의 컴포넌트의 바람직한 실시예들은 도 5에 도시되고; 부스트 스테이지(404)(및 스위칭 손실 감소 회로(410)의 관련된 요소들)는 도 5A에 도시되고; 스위칭 손실 감소 회로(410)는 도 5B에 도시되고(모든 스테이지에 공통인 요소들); 제어 회로(412)는 도 5C에 도시된다.
인버터(108)
인버터(108)는, 정류(rectification) 및 조정 시스템(102)(예를 들면, 레귤레이터(400))의 출력으로부터, 소정의 전압 및 파형의 AC 출력 신호, 예를 들어, 120V RMS 50/60 Hz AC를 생성할 수 있는 임의의 회로를 포함할 수 있다. 도 8을 참조하면, 적합한 인버터 브리지는, 인버터 출력의 양의 절반 사이클(positive half cycle)과 관련되는, 제1 "하이 사이드"(상부) 스위칭 회로(802)(예를 들면, 하나 이상의 FET을 포함함) 및 관련된 드라이버 회로(804); 인버터 출력의 음의 절반 사이클과 관련되는, 제2 "하이 사이드"(상부) 스위칭 회로(806)(-U) 및 관련된 드라이버 회로(808); 인버터 출력의 양의 절반 사이클과 관련되는, 제1 "로우 사이드"(하부) 스위칭 회로(810)(+L) 및 관련된 드라이버 회로(812); 인버터 출력의 음의 절반 사이클과 관련되는, 제2 "로우 사이드"(하부) 스위칭 회로(814)(-L) 및 관련된 드라이버 회로(816); 통상적으로 인덕터 및 커패시터를 포함하는 적합한 필터 회로(822); 전류 감지 회로(824); 및 제어기(826)를 포함한다. 바람직한 실시예에서, 인버터(108)는 (정류기/리미터(200) 내의 회로와 유사한) 각각의 스위칭 손실 감소 회로들(818 및 820)을 더 포함하며, 이들은 각각 로우 사이드 스위칭 회로들(810 및 814)과 함께 동작한다. 주어진 절반 사이클과 관련된 스위칭 장치들(802, 810; 806, 814)은, 조정된 DC 레일(rail), 즉, 정류기 및 레귤레이터 시스템(102)의 출력 VRO와 공통 접지 사이에서 필터(822)에 직렬로 접속된다. 하이 사이드 스위치(802, 806)는 양의 레일 +VR0과 필터(822) 사이에 접속되고, 로우 사이드 스위치(810, 814)는 출력 필터(822)와 공통 접지 사이에 접속된다. AC 출력은 필터(822)로부터 출력된다. 전류 센서(824)는 AC 전류를 나타내는 출력 신호 I_SNS를 제공한다. 제어기(826)는 드라이버들(804, 808, 812 및 814)에게 제어 신호들을 제공한다.
인버터(108)의 컴포넌트의 바람직한 실시예들은 도 10에 도시되며; 스위칭 회로(802) 및 드라이버 회로(804)는 도 10A에 도시되고; 스위칭 회로(806) 및 드라이버 회로(808)는 도 10B에 도시되며; 스위칭 회로(810) 및 드라이버 회로(812)는 도 10C에 도시되고; 스위칭 회로(814) 및 드라이버 회로(816)는 도 10D에 도시되고; 스위칭 손실 감소 회로들(818 및 820)은 도 10E에 도시되고; 필터 회로(822) 및 전류 감지 회로(824)는 도 10F에 도시되며; 제어기(826)는 도 10G에 도시된다.
일반적으로, AC 신호는, 소정 주파수(desired frequency)의 1/2 사이클(180°)에 대응하는 기간, 예컨대, 60 ㎐ 신호에 대해 대략 8.33㎳동안, 제1 스위칭 디 바이스 쌍(예컨대, +1/2 사이클에 관련된 스위치(802, 810)), 그 다음 제2 스위칭 디바이스 쌍(예컨대, -1/2 사이클에 관련된 스위치(806, 814))에, 상호 배타성에 근거하여, 주기적으로 도전성을 부여함으로써 발생된다. 이는 본질적으로 출력 필터(822)에 의해 평탄해지는 구형파 형상을 발생하지만; 파형(wave shape)은 멀리서는 종종 사인파에 가깝다.
사인파에 더 가깝도록 파형을 정형하는 종래의 방법은 "주요(primary)" 스위치들(순간적으로 1/2 사이클과 관련된 스위치 쌍)로의 구동 신호들을 펄스폭 변조하는 것이다. 예를 들어, 도 9A를 참조하면, 사인파(850)의 사이클은 +1/2 사이클(852)(0-180°) 및 -1/2 사이클(854)(180-360°)를 포함한다. 각 사이클에 대응하는 시간 기간은, 사실상, 소정 수의 공칭 간격(nominal intervals)(PWM 프레임들)(예컨대, 도 9에서는 48개, 설명을 용이하게 하기 위해, 바람직한 실시예에서는 16.66㎲ 지속기간인 1000개의 간격)으로 다시 나뉘고, 바람직하게는, 각 프레임의 단부에 짧은 무효 시간(dead time)을 포함한다. 각 PWM 프레임은 파형의 소정의 각도 부분(angular portion)(분해능), 예컨대, 도 9의 예시적인 실례에 있어서는 대략 7.5°에 대응한다. 주요 스위치들(+1/2 사이클(852)에 대해서는 802(+U), 810(+L), 또는 -1/2 사이클(854)에 대해서는 806(-U), 814(-L))은 시간 증분들 각각(통상적으로 각각)의 부분에 대해서만 턴온된다. 종래에는, 도 9A에 도시된 바와 같이, 상측 및 하측 주요 스위치 모두 동시에 스위치 온 및 오프된다. 각 경우에, 듀티 사이클은 1% 미만, 97% 초과의 범위일 수 있다.
개별 간격동안 스위치들이 턴온되는 동안(듀티 사이클)의 시간 증분의 퍼센 트는, 소정의 사인 곡선 파형을 시뮬레이트하기 위한 소정의 대응 파형의 순간적이고 상관적인 진폭의 함수로서 달라진다. 그러나, 일반적으로, 주요 스위치의 듀티 사이클은 통상적으로 0°에 대응하는 시간 기간 동안 최소값이고, 풀 듀티 사이클이 위상 90°에 대응하는 시간 기간에 도달할 때까지 연속적인 증분들이 점차적으로 증가하며, 그 다음, 최소가 180°에 도달할 때까지 감소(첫 90°와 대칭적으로)한다. 7.5°증분(분해능)의 간략화된 예에서, 다양한 증가 시간 기간동안 주요 스위치들의 듀티 사이클의 전형적인 값들은 위상 7.5°에 대응하는 시간 기간동안 5%, 위상 7.5-15°에 대응하는 시간 기간동안 10%, 위상 36.6-44°에 대응하는 시간 기간동안 50%, 위상 82.5-90°에 대응하는 시간 기간동안 100%, 위상 127.5-135°에 대응하는 시간 기간동안 50%, 및 위상 172.5-180°에 대응하는 시간 기간동안 5%이다.
상술한 바와 같이, 기본적인 파 정형(예컨대, 평탄화(smoothing))은 필터(822)에 의해 제공된다. 본래, 필터(822)의 인덕터와 커패시터는 전류가 주요 스위치를 통해 흐르는 기간동안 자기 및 전기적 에너지를 저장한다. 그러나, 후속하는 펄스 이전의 개재(intervening) 무효 시간(주요 스위치들이 턴오프되는 동안의 시간 간격의 부분)동안 인턱터가 완전히 방전되지 못하면, 파형의 왜곡이 발생할 수 있다. 이는, 필터 내에 남겨진 임의의 잔여 에너지가 다음 펄스에 의해 주입된 에너지에 추가되기 때문이다. 이러한 에너지의 총합은 의도된 값을 산출하지 못할 것이다. 종래에는, 출력 필터(822)가 각 시간 기간 동안 완전하게 방전/리셋되도록 하기 위해, 펄스들 간의 "무효 시간(dead time)"의 적어도 일부에 대해 상보 스 위치들을 통한 방전 경로가 제공되었다. 종래에는, 도 8A에 도시된 바와 같이, 방전 경로를 제공하기 위해, 상측 및 하측 상보 스위치(+1/2 사이클동안 -U, -L, 및 -1/2 사이클동안 +U, +L) 모두 동시에 스위치 온 및 오프되었다. 상보 스위치는 통상적으로 주요 스위치의 듀티 사이클에 역비례하는 기간동안 턴온된다. 예를 들어, 주요 스위치의 듀티 사이클이 간격동안 최대값인 경우, 상보 스위치는 주요 스위치의 최소 듀티 사이클에 대응하는 시간 기간동안 턴온된다.
일반적으로, 1/2 사이클로 나뉘는 증분 시간 기간의 수가 많을수록(즉, 시뮬레이션의 "분해능(resolution)"이 높을수록), 사인 곡선의 파형에 거의 근접하게 된다. 그러나, 전력 스위치가 턴오프되는 횟수가 클수록, 스위칭 손실이 커지고, 그에 수반하는 열도 커진다. 그러한 손실을 줄이는 한 방법으로, 인버터 브리지(604) 내에 스위치 각각에 대하여 각각의 스위칭 손실 감소 회로(회로(204)에 유사한)를 채용하는 것이다. 부스트-형 레귤레이터(400)의 사용은, 그러한 회로들에 의해 수집된 에너지의 탈환을 용이하게 하고; 수집된 에너지는 조정에 영향을 미치지 않고 입력 소스로 피드백될 수 있다. 전압이 증가하기 시작하면, 부스트 레귤레이터 피드백 제어 회로는 보상할 것이다.
본 발명의 다른 관점에 따르면, 인버터의 도통 및 스위칭 손실은 또한(혹은 이에 대한 대안으로) 도 9B에 도시한 바와 같이, (a) 전체 대응 해프 사이클 동안 주요 스위치들중 하나(바람직하게는 하이 사이드 스위치)가 도통을 유지하고 다른 주요 스위치(예를 들면, 로우 사이드 스위치)만 펄스폭 변조를 유지하고/하거나, (b) (i)해프 사이클 동안 유지되는 주요 스위치에 대응하는 상보 스위치(예를 들 면, 하이 사이드 상보 스위치)에만 상보 펄스폭 변조를 실시함으로써 감소될 수 있다. 실제로, 주요 스위치들중 오직 하나만(예를 들면, 로우 사이드 스위치) 변조하고 전체 해프 사이클 동안 다른 주요 스위치를 온으로 유지함으로써, 종래에 비해 주요 스위치들의 발열 스위칭 천이 수가 반으로 감소된다. 마찬가지로, 상보 스위치들중 오직 하나(예를 들면, 하이 사이드 스위치)를 통해서만 상보 방전 변조를 제공함으로써, 실제로 종래의 기술에 비해 상보 스위치들의 발열 스위칭 천이의 수가 반으로 감소된다.
또한, 본 발명자들은, 사전설정된 레벨 위의 부하로(예를 들면 1KW 내지 2KW의 범위에서), 필터(822)가 완전하게 방전되도록 하기 위해 펄스들간의 특정 방전 경로를 제공할 필요가 없는 것을 판별하였다. 따라서, 본 발명의 또다른 관점에 따르면, 상보 스위치들의 스위칭 천이의 수는, 임계치 아래의 전력 레벨에서만 상보 스위치 방전 경로 변조를 실시함으로써 또한 감소될 수 있다. 임계치 위의 전력 레벨에서, 상보 스위치들은 해프 사이클 동안 오프로 유지된다. 따라서, 스위칭 천이가 방지될 뿐만 아니라, 상보 스위치의 천이가 상대적인 부하에서 발생되어 스위칭 손실 레벨이 상대적으로 낮게 된다.
다시 도 8을 참조하면, 스위치들(802, 806, 810, 814)은, 관련 드라이버들(804, 808, 812, 814)에 인가된 제어기(826)로부터의 제어 신호에 의해 선택적으로 도통되게 된다.
바람직한 실시예에서, 제어기(826)는 전류 센서(824)로부터의 입력 신호 I_SNS 및 Vout_I에 응답하여 제어 신호를 생성하는데, 제어 신호는 이하를 포함한 다.
<표>
| DLE | 펄스폭 변조된 신호 PWMB에 따라 동작을 위해 포지티브 해프 사이클 동안 포지티브 하위 드라이브(812)를 선택적으로 인에이블시키기 위한 것임 |
| DUE | 펄스폭 변조된 신호 PWMB에 따라 동작을 위해 네거티브 해프 사이클 동안 네거티브 하위 드라이브(816)를 선택적으로 인에이블시키기 위한 것임 |
| DUT | 네거티브 해프 사이클 동안 신호 PWMB에 대해 상보(반전)인 펄스폭 변조된 신호에 따라, 전체 포지티브 해프 사이클 동안, 로우 부하 조건하에서(예를 들면, >1KW), 포지티브 상부 드라이브(804)를 선택적으로 인에이블시키고 구동시키기 위한 것임 |
| DLT | 포지티브 해프 사이클 동안 신호 PWMB에 대해 상보(반전)인 펄스폭 변조된 신호에 따라, 전체 네거티브 해프 사이클 동안, 로우 부하 조건하에서(예를 들면, >1KW), 네거티브 상부 드라이브(808)를 선택적으로 인에이블시키고 구동시키기 위한 것임 |
| PWMB | 선택된 하부 드라이브(810 또는 814)의 펄스폭 변조를 실시하기 위한 신호 |
| SD_U | 오버 전류 상태 시에 네거티브 하부 드라이브(816)를 디스에이블시키기 위한 것임 |
| SD_L | 오버 전류 상태 시에 포지티브 하부 드라이브(812)를 디스에이블시키기 위한 것임 |
도 10C를 참조하면, 제어기(826)의 바람직한 구현 장치는, 내부 PWM 발생기 모듈을 갖는 마이크로컨트롤러(1000), 감산 드라이버(1002), 전형적인 해프 브리지 드라이버 회로(예를 들면, 내부 정류기 IR2111 해프 브리지 드라이버)(1004) 및 각각의 드라이버 회로를 적절하게 포함한다.
논의되는 바와 같이, 마이크로컨트롤러(1000)는 핀(27)(RB6)에서, 파형의 순시적인 해프 사이클을 나타내는, 원하는 주파수에서의 효과적인 역구형파인, 해프 사이클 주기 신호(POS_HALF_DISABLE)를; 핀(12)(RC1/OS1/CCP1)에서, 출력 부하가 선정된 레벨(예를 들면, 1KW) 이하일 때, 선택적으로, 각 PWM 프레임(예를 들면, 16.66μS 시간격)에 대응하는, 펄스 스트림, PWMC를; 핀(13)(RC2/CCP1)에서, 프로그램된 듀티 사이클을 갖는 PWM 신호를 생성한다.
해프 사이클 주기 신호(POS_HALF_DISABLE)는 높은측 인에이블(DLT 및 DUT) 및 낮은측 디세이블 신호(DLE 및 DUE)를 디벨롭하는데 활용된다. 해프 사이클 주기 신호(POS_HALF_DISABLE)은 레벨 시프트되고(트랜지스터 Q14를 통해), 포지티브 해프 디세이블(DLE) 및 네가티브 해프 디세이블(DUE) 신호를 생성하는, 바람직하기로는 정류기(200)의 동작에서 포텐셜 슈트 쓰루(potential shoot through)를 방지하기 위한 트랜지스터들간의 짧은 지연을 포함하는 해프 브리지 드라이버 회로(1004)에 입력으로서 인가되며, 이는 낮은측 드라이버들(812, 816)에 적용가능하다(도 10A). 포지티브 해프 디세이블(DLE) 및 네가티브 해프 디세이블(DUE) 신호는 또한 종래의 낮은측 MOSFET 드라이버(1006)(적합하기로는, Micrel MIC4424N 듀얼 3A-피크 낮은측 MOSFET 드라이버)에 의해 버퍼링되어 상보(인에이블링) 신호 DLT 및 DUT를 유도하며, 이는 높은측 드라이버들(804, 806)에 적용가능하다(도 10A).
펄스폭 변조 신호 PWM(핀 13)은 종래의 낮은측 MOSFET 드라이버(1008)에 의해 버퍼링되어, PWM 구동 신호 PWMB를 생성하며, 이는 낮은측 드라이버(812, 814)에 적용가능하다(도 10A).
펄스폭 변조 신호 PWM(핀 13)은 또한 PWM 프레임 신호 PWMC(핀 12)와 함께, 차감 드라이버(1002)에 인가된다. PWM 프레임 신호 PWMC는 출력 부하가 선정된 임계치 이하일 때에만 생성된다. 차감 드라이버(1002)는 프레임 신호로부터 PWM 신호를 효과적으로 차감한다. 따라서, 차감 드라이버(1002)는 프레임 신호가 생성되지 않을 때 고부하 구간동안 효과적으로 디세이블되고 출력부하가 선정된 임계치 이하일 때 상보 PWM 신호, PWMD를 생성한다. 상보 PWM 신호 PWMD는 신호 DLT 및 DUT를 인에이블하는 높은측 스위치의 구성요소로서 적용가능한, 드라이버(1006)의 입력들 양측에 인가된다. 드라이버(1006)의 입력이 이미 해프 브리지 드라이버 회로(1004)로부터의 출력에 의해 하이레벨에 있는 경우, 상보 PWM 신호 PWMD는 아무런 영향을 미치지 않는다. 그러나, 그 출력이 그와는 반대로 로우레벨에 있다면, 높은측 인에이블 신호는 상보 PWM 신호 PWMD를 추적한다.
마이크로컨트롤러(1000)는 다음과 같이 구성된 마이크로칩 PIC18242 마이크로컨트롤러를 포함하는 것이 적합하다:
타이머 0(TMR0) 타이머 0는 내부 클럭에 의해 구동되는 8비트 카운터로서 구성된다. 타이머값은 각 롤오버시 리로딩되어 고정된 시간 기반, 예를 들면, 100mS에서 타이머 0로부터 인터럽트 이벤트를 생성한다.
PWM(1)은 2개의 하드웨어 레지스터에 의해 제어되는 듀티-사이클 및 주기 레지스터 PR2에 의해 제어되는 PWM(PulseWidthModulation) 모듈에 기초한 하드웨어이다. CCPR1L은 10비트 듀티 사이클의 상위 8비트를 보유하고, 최하위 2비트는 제어 레지스터 CCP1CON 비트 5 및 4에 보유된다. 일단 제어 레지스터가 기입되고 PWM 모듈이 턴온되었다면, 모듈은 소정 주기(주파수) 및 듀티 사이클에 반드시 독립적으로 구동될 것이다. PWM 모듈로부터의 인터럽트 이벤트는 새로운 프레임이 시작되었다는 것을 표시한다. 이는 CCPR1L내의 값이 모듈의 내부 레지스터에 로딩되었다는 것을 의미한다. CCPR1L 레비스터는 순시적인 주기 롤오버시 내부 레지스터의 콘텐츠를 저장하는, 실제 내부 듀티 사이클 레지스터용 "래치"이다. 만일 래치가 현재 주기가 만료하기 전에 갱신되지 않는다면, 래치의 현재값은 재사용될 것 이다.
테이블 포인터: 코드 스페이스 데이터의 억세스를 위한 24-비트 포인터. 이 하드웨어 포인터는 코드 스페이스에 상수의 리스트로서 저장되는 듀티 사이클 데이터를 판독하는데 사용된다. 포인터는 3개의 레지스터로 구성된다:
TBLPTRU: 24비트 포인터의 "최상위" 8비트
TBLPTRH: 24비트 포인터의 높은 8비트
TBLPTRL: 24비트 포인터의 최하위 8비트
포인터에 기초한 판독은 24비트 테이블 포인터에 보유된 어드레스에서 코드 스페이스(ROM)에 저장된 데이터를 리턴시킨다.
파일(RAM) 포인터: 파일(RAM) 데이터 스페이스의 액세스를 위한 12 비트 포인터. 이 하드웨어 포인터는 RAM을 클리어(clear)하고 아날로그 스레드(analog thread) 내에 히스토리(history)를 저장하는데 사용된다.
아날로그-디지털 변환기: 이 하드웨어 모듈은 선택된 입력 채널로부터 판독을 행하고 8 비트 또는 10 비트 결과를 저장한다. 선택된 채널은 제어 레지스터 ADCON0 비트 5, 4 및 3에 의해 제어된다.
3 입력/출력 포트: 디지털 전용인 두 개의 8 비트 포트(PORTB 및 PORTC)와 디지털 또는 아날로그, 또는 그 둘의 혼합일 수 있는 6 비트 포트(PORTA). 포트 내의 각 비트는 디지털 입력 또는 출력으로 구성될 수 있다. 또한, 6 비트 포트(PORTA)는 아날로그 입력을 수신하도록 구성될 수 있다.
일반적으로, 마이크로컨트롤러(1000)는 마이크로컨트롤러 PWM 모듈의 듀티 싸이클(duty cycle)을 제어하도록 프로그램되어, 인버터에서 60KHz 사인파(sine wave)를 생성한다. 16.66us의 시간 간격(PWM 프레임)이 구축된다. 프레임의 시작에서, PWM 신호(핀 13)는 적용가능 듀티 싸이클에 대해 하이(high)로 되고, 그 후 나머지 프레임에 대해서는 로우(low)가 된다. 듀티 싸이클 값의 테이블은 외부 프로그램을 사용하여 사인형 출력을 생성하도록 구성된다. 테이블은 180 등급(degrees)의 데이터를 보유한다. 출력 제어 비트는 상태를 변경하고 테이블은 제2 180 등급에 대해 (역순으로) 반복된다. 임계값 이하의 부하 조건을 검출하기 위해 출력 전류가 모니터(monitor)되는데, 이러한 조건 하에서 PWM 프레임 신호 PWMC가 발생되어 상보적 PWM 신호 PWMD를 생성하게 된다. 듀티 싸이클에 전용되는 10 비트의 데이터 이상에서는 파형 온/오프 플래그(a wave shaping on/off flag)가 안정적으로 내장되어, 파형의 프레임 단위 제어가 허용된다.
제어기(826)에 의해 실행되는 프로그램의 플로우차트가 도 11A-Q에 제공되어 있다. 일반적으로, 프로그램은 정규 초기화, 개시 및 "메인 루프" 시퀀스로 구성된다. 메인 루프에서는, 3개의 호출이 이루어진다.
GetNextDuty: 듀티 싸이클이 재개시됨을 나타내는 플래그에 대한 검사. 설정된 경우, 하드웨어 레지스터를 위해 마련된 테이블로부터 다음 듀티 싸이클을 사용하는데 요구되는 단계를 수행. 앞서 주지된 바와 같이, 이 기능이 PWM 프레임 만료 이전에 완료된 경우, 구(old) 듀티 싸이클이 다시 사용될 것이다. 그러므로, 이 기능에는 최상위 우선권이 주어지며, 일단 트리거(trigger)되고 나면, 시스템 내의 어떤 다른 작업과 상관 없이 실행된다.
GetAnalogInputs: 아날로그 입력(Vout_I, I_SNS)을 얻고, 각 결과를 버퍼 내에 저장하며, 각 버퍼의 평균을 계산함. 이 루틴에는 하위 우선권이 적절하게 주어지며, "스레드"로서 구성된다. 완료 시, 플래그는 아날로그 채널이 판독되고 버퍼링되었으며, 각 버퍼의 평균이 계산되었음을 나타내도록 설정된다.
PowerMonitor: 인버터로부터 부하 전류를 모니터함. 이 기능은 부하 전류를 검사하고 어느 테이블이 다음 반 싸이클을 위해 사용될 것인지를 결정한다. 출력 부하 임계값은 적절하게 단일 값이 아니다. 부하 전류가 임계값에 매우 가까울 경우에는 적은 양의 이력 현상이 포함되어 지터를 필터할 수 있다. 이 기능은 아날로그 채널이 판독되고, 버퍼링되었으며 각 버퍼의 평균값이 계산되었다는 것을 나타내는 플래그에 의해 트리거된다.
또한, 몇몇 "지원" 기능이 이용된다.
InitCpuRam: 제어 레지스터를 초기화하고 모든 사용된 RAM을 클리어함.
InitSpecialVals: 이 프로그램에 특정되는 변수 또는 레지스터를 설정
GetTable: 듀티 싸이클 테이블로부터 판독하고 내장된 플래그를 이출함. 또한, 이 루틴은 테이블의 끝을 검출함. 테이블의 끝이 검출되면, TBLPTR이 재적재되고 조건을 나타내기 위해 플래그가 설정된다.
WritePWMReg: 테이블로부터의 듀티 싸이클을 하드웨어 레지스터에 기록.
WriteHistory: 아날로그 스레드에 의해 사용되어 아날로그 결과를 아날로그 히스토리 어레이 내의 적절한 위치에 저장.
CalcADHistAvg: 아날로그 스레드에 의해 사용되어 단일 채널에 사용되는 아 날로그 히스토리의 섹션의 평균을 계산.
DC-DC 변환기(106)
전술한 바와 같이, DC - DC 변환기(106)는 정류 및 조절 시스템(102)(예컨대, 레귤레이터 400)의 비교적 높은 전압 출력(예컨대, 180V)으로부터 원하는 레벨의 출력 전압(들) V1, 예컨대, 12, 24, 또는 42 볼트 DC를 도출한다. DC - DC 변환기(106)는 예컨대, 스위치 모드내의 해프 브리지, 풀 브리지, 푸시풀, 플라이 백(fly back), 포워드 변환기, 또는 백 부스트(back boost) 변환기와 같은 임의의 적절한 토폴로지를 이용하여 구현될 수 있다. DC - DC 변환기(106)의 양호한 실시예는 변조된 풀 브리지 펄스 폭, 스텝 다운(stepped down), 토폴로지를 이용하여 구현된다. 도 6을 참조하면, 이러한 DC - DC 변환기(106)는, 필터 커패시터(602), 종래의 펄스 폭 변조(PWM) 제어기(606)(예컨대, LinFinity SG1842 Current-Mode PWM 제어기)에 응답하는, 예컨대, FETs(604)와 같은 종래의 인버터 H-브리지 전력 스위치, 종래의 스텝 다운 변압기(610), 종래의 다이오드 브리지 정류기(612) 및 저장 커패시터(614)를 포함한다. 일반적으로, 비교적 고 레벨(예컨대, 180V) DC 입력 신호(레귤레이터 400으로부터의 VRO)는 인버터(604)에 의해 펄스 폭 변조 신호로 변환된다. 변압기(610)는 PWM 신호의 전압을 소정의 레벨로 스텝 다운한다. 다음에 정류기(612)는 신호를 DC로 정류하고, 저장 커패시터(614)를 충전한다. PWM 신호의 듀티 사이클은 출력 VI에 따라 제어기(606)에 의해 제어되고, 이에 따라 원하는 값으로 출력 신호를 조절한다. 각각의 스위칭 손실 감소 회로(608)(회로(204)에 대해 아날로그)는 양호하게는 인버터 브리지(604)내의 스위치에 대해 제 공된다.
DC - DC 변환기(106)의 콤포넌트의 양호한 실시예가 도 7에 도시되는데, 전력 스위치(604)(에너지 반환은 없음) 및 변압기(610)의 일부는 도 7a에 도시되고, 제어기(606)는 도 7b에 도시되고, 정류기(612), 변압기(610)의 일부 및 저장 커패시터(614)는 도 7c에 도시되고, 스위칭 손실 감소 회로(608)와 함께 동작하도록 적응된 전력 스위치(604)의 대안적인 구성은 도 7d에 도시되고, 스위칭 손실 감소 회로(608)은 도 7e에 도시된다.
본 발명이 다양한 예시적 실시예에 따라 기술되었지만, 본 발명은 도시된 특정 형태에 한정되는 것은 아니며, 본 발명의 다른 실시예도 본 발명의 사상을 벗어남이 없이 생성될 수 있다. 콤포넌트, 재료, 값, 구조, 및 설계 및 배치의 여러 측면에 대한 변형이 다음의 특허청구범위에 따라 표현된 바와 같은 본 발명에 따라 만들어질 수 있다.
Claims (32)
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 가변 전압의 교류 입력 신호로부터, 미리 정해진 출력 전압을 갖는 조정된 DC 출력 신호를 생성하는 시스템으로서,멀티 모드 정류 회로 및 부스트 레귤레이터를 포함하며,상기 멀티 모드 정류 회로는, 상기 입력 신호로부터 상기 미리 정해진 출력 전압보다 낮은 미리 정해진 최대 임계 전압을 갖는 정류된 DC 신호를 생성하고,상기 멀티 모드 정류 회로는, 풀 웨이브 정류 모드 또는 해프 웨이브 정류 모드로 선택적으로 동작하고, 해프 웨이브 정류시, 풀 듀티 사이클 모드 또는 펄스 폭 변조 모드로 선택적으로 동작하고,상기 입력 신호의 전압이 상기 최대 임계 전압을 초과할 때 풀 웨이브 정류로부터 해프 웨이브 정류로 스위칭하고,상기 입력 신호의 전압이 상기 최대 임계 전압보다 미리 정해진 차이만큼 낮은 미리 정해진 낮은 임계치 아래로 강하할 때 해프 웨이브 정류로부터 풀 웨이브 정류로 스위칭하고,해프 웨이브 정류 모드시, 상기 정류된 DC 신호의 전압이 상기 최대 임계 전압을 초과할 때 펄스 폭 변조 모드로 스위칭하고,상기 부스트 레귤레이터는, 상기 정류된 DC 신호로부터, 상기 미리 정해진 출력 전압에서 조정된 DC 신호를 생성하는 시스템.
- 제14항에 있어서,상기 멀티 모드 회로는, 풀 웨이브 정류에서는 상기 최대 임계 전압을 초과하는 출력 레벨을 생성하지만, 해프 웨이브 정류에서는 상기 미리 정해진 낮은 임계치와 적어도 동일한 출력 레벨을 제공하지 않는 조건 하에서, 풀 웨이브 정류와 해프 웨이브 정류 사이에서 디더링하는 시스템.
- 제14항에 있어서,상기 정류 회로는,인가된 제어 신호에 응답하여, 상기 입력 신호의 풀 웨이브 정류를 선택적으로 실행하는 정류기 브리지 회로와,상기 정류기 브리지 회로와 연동하고, 인가된 제어 신호에 응답하여, 상기 입력 신호의 해프 웨이브 정류를 선택적으로 실행하는 해프 브리지 변환 회로와,상기 출력 신호의 전압의 표시에 응답하여, 해프 웨이브 정류 신호의 듀티 사이클을 선택적으로 제어하는 펄스 폭 변조기와,상기 입력 신호의 표시에 응답하여, 상기 정류기 브리지 회로 및 해프 브리지 변환 회로에 대한 상기 제어 신호를 생성하는 제어 회로를 포함하는 시스템.
- 제14항에 있어서,상기 멀티 모드 정류 회로 및 상기 부스트 레귤레이터 중 적어도 하나는, 턴오프 손실이 있을 수 있는 적어도 하나의 스위칭 소자를 포함하고, 턴오프 동안 상기 스위칭 소자 양단에 전압 변경 레이트를 제한하도록 배치된 커패시터와, 상기 커패시터가 상기 스위칭 소자의 다음의 연속하는 턴오프의 시작까지 실질적으로 완전히 방전되도록 미리 정해진 방전 포인트에 상기 커패시터를 선택적으로 방전하는 회로를 더 포함하는 시스템.
- 제14항에 있어서,상기 멀티 모드 정류 회로 및 상기 부스트 레귤레이터 중 적어도 하나는, 턴오프 손실이 있을 수 있는 적어도 하나의 전력 스위칭 소자를 포함하고, 제1 및 제2 다이오드, 커패시터, 인덕터 및 스위칭 디바이스를 더 포함하며, 상기 제1 다이오드 및 커패시터는 상기 전력 스위칭 소자 양단에 접속되고, 상기 스위칭 디바이스는 상기 커패시터 양단에 상기 인덕터와 직렬로 접속되어 상기 전력 스위칭 소자와 동기하여 동작하고, 상기 제2 다이오드는 상기 인덕터와 미리 정해진 방전 포인트 사이에서 방향성 전류 경로를 제공하도록 배치되는 시스템.
- 제18항에 있어서,전력 스위치는 상기 정류기에 존재하고, 상기 미리 정해진 방전 포인트는 정류기의 출력인 시스템.
- 제14항에 있어서,상기 조정된 DC 출력 신호에 응답하여, 미리 정해진 주파수 및 파형을 갖는 AC 출력 신호를 생성하기 위한 인버터를 더 포함하는 시스템.
- 제20항에 있어서,상기 인버터는, 턴오프 손실이 있을 수 있는 적어도 하나의 스위칭 소자를 포함하고, 턴오프 동안 상기 스위칭 소자 양단에 전압 변경 레이트를 제한하도록 배치된 커패시터와, 상기 커패시터가 상기 스위칭 소자의 다음의 연속하는 턴오프의 시작까지 실질적으로 완전히 방전되도록 미리 정해진 방전 포인트에 상기 커패시터를 선택적으로 방전하는 회로를 더 포함하는 시스템.
- 제21항에 있어서,상기 미리 정해진 방전 포인트는 상기 부스트 레귤레이터의 출력인 시스템.
- 제21항에 있어서,상기 인버터는,외부 부하에서 이용가능한 정현파 AC 출력 신호를 만드는 필터 회로와,제1 극성을 갖는 AC 출력 신호의 해프 사이클과 관련하여, 상기 제1 극성에 대응하는 방향으로 상기 필터를 통한 전류 흐름을 선택적으로 확립하도록 접속되는 제1 스위치 쌍과,제2 극성을 갖는 AC 출력 신호의 해프 사이클과 관련하여, 상기 제2 극성에 대응하는 방향으로 상기 필터를 통한 전류 흐름을 선택적으로 확립하도록 접속되는 제2 스위치 쌍 - 각 쌍은 제1 및 제2 스위칭 디바이스를 포함하며, 상기 스위치들은 인가된 제어 신호에 응답함 - 과,주기적으로, 상기 AC 출력 신호의 연속하는 해프 사이클에 대응하는 연속하는 시간 주기 동안에, 실질적으로 그 시간 주기 전체에 대하여 대응하는 해프 사이클의 극성과 관련한 스위치 쌍의 제1 스위치를 도통시키고, 상기 미리 정해진 파형에 대응하는 미리 정해진 펄스 폭 변조 패턴에 따라 대응하는 해프 사이클의 극성과 관련한 스위치 쌍의 제2 스위치를 선택적으로 도통시키도록, 상기 스위치들에 대한 제어 신호를 생성하는 제어기를 포함하는 시스템.
- 제23항에 있어서,적어도 하나의 스위치는, 턴오프 손실이 있을 수 있는 스위칭 소자를 포함하고, 턴오프 동안 상기 스위칭 소자 양단에 전압 변경 레이트를 제한하도록 배치된 커패시터와, 상기 커패시터가 상기 스위칭 소자의 다음의 연속하는 턴오프의 시작까지 실질적으로 완전히 방전되도록 미리 정해진 방전 포인트에 상기 커패시터를 선택적으로 방전하는 회로를 더 포함하는 시스템.
- 제24항에 있어서,상기 제2 스위치들은, 턴오프 손실이 있을 수 있는 적어도 하나의 전력 스위칭 소자를 포함하고, 제1 및 제2 다이오드, 커패시터, 인덕터 및 스위칭 디바이스를 더 포함하며, 상기 제1 다이오드 및 커패시터는 상기 전력 스위칭 소자 양단에 접속되고, 상기 스위칭 디바이스는 상기 커패시터 양단에 상기 인덕터와 직렬로 접속되어 상기 전력 스위칭 소자와 동기하여 동작하며, 상기 제2 다이오드는 상기 인덕터와 미리 정해진 방전 포인트 사이에서 방향성 전류 경로를 제공하도록 배치되는 시스템.
- 제25항에 있어서,상기 미리 정해진 방전 포인트는 상기 부스트 레귤레이터의 출력인 시스템.
- 제23항에 있어서,상기 제어기는, 상기 인버터의 부하의 표시를 생성하는 센서 회로를 포함하고, 상기 연속하는 시간 주기 동안에, 상기 대응하는 해프 사이클의 극성의 반대 극성과 관련한 스위치 쌍의 제1 스위치에 대한 추가의 제어 신호를, 상기 부하가 미리 정해진 값 이하일 경우에는 상기 대응하는 해프 사이클의 극성과 관련한 스위치 쌍의 제2 스위치와 상호 배타적으로 그 스위치를 도통시키고, 상기 부하가 미리 정해진 값 이상일 경우에는 실질적으로 그 시간 주기 전체에 대하여 그 스위치를 도통시키지 않도록, 생성하는 시스템.
- 제23항에 있어서,상기 조정된 DC 출력 신호는 포지티브 레일 및 커먼 레일 상의 인버터에 제공되고, 상기 스위치 쌍들의 제1 스위치들은 상기 포지티브 레일과 상기 필터 사이에 접속되며, 상기 스위치 쌍들의 제2 스위치들은 상기 필터와 상기 커먼 레일 사이에 접속되는 시스템.
- 제23항에 있어서,상기 제2 스위치들은, 턴오프 손실이 있을 수 있는 적어도 하나의 전력 스위칭 소자를 포함하고, 제1 및 제2 다이오드, 커패시터, 인덕터 및 스위칭 디바이스를 더 포함하며, 상기 제1 다이오드 및 커패시터는 상기 전력 스위칭 소자 양단에 접속되고, 상기 스위칭 디바이스는 상기 커패시터 양단에 상기 인덕터와 직렬로 접속되어 상기 전력 스위칭 소자와 동기하여 동작하며, 상기 제2 다이오드는 상기 인덕터와 미리 정해진 방전 포인트 사이에서 방향성 전류 경로를 제공하도록 배치되는 시스템.
- 제28항에 있어서,상기 미리 정해진 방전 포인트는 상기 포지티브 레일인 시스템.
- 삭제
- 삭제
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US47527303P | 2003-06-02 | 2003-06-02 | |
| US60/475,273 | 2003-06-02 | ||
| US53266403P | 2003-12-24 | 2003-12-24 | |
| US60/532,664 | 2003-12-24 | ||
| PCT/US2004/017571 WO2004109892A2 (en) | 2003-06-02 | 2004-06-02 | Controller for permanent magnet alternator |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020117021307A Division KR101172340B1 (ko) | 2003-06-02 | 2004-06-02 | 영구 자석 교류기용 제어기 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20060063792A KR20060063792A (ko) | 2006-06-12 |
| KR101102802B1 true KR101102802B1 (ko) | 2012-01-05 |
Family
ID=33514047
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020057023235A KR101102802B1 (ko) | 2003-06-02 | 2004-06-02 | 영구 자석 교류기용 제어기 |
| KR1020117021307A KR101172340B1 (ko) | 2003-06-02 | 2004-06-02 | 영구 자석 교류기용 제어기 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020117021307A KR101172340B1 (ko) | 2003-06-02 | 2004-06-02 | 영구 자석 교류기용 제어기 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7176658B2 (ko) |
| EP (1) | EP1634357A2 (ko) |
| JP (1) | JP4758890B2 (ko) |
| KR (2) | KR101102802B1 (ko) |
| CN (1) | CN101015114B (ko) |
| CA (1) | CA2528145A1 (ko) |
| MX (1) | MXPA05013014A (ko) |
| WO (1) | WO2004109892A2 (ko) |
Families Citing this family (90)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10321155A1 (de) * | 2003-05-12 | 2004-12-02 | Robert Bosch Gmbh | Vorrichtung zur Spannungsversorgung in einem Kraftfahrzeug |
| EP1649574A2 (en) * | 2003-07-10 | 2006-04-26 | Magnetic Applications Inc. | Compact high power alternator |
| US7162397B2 (en) * | 2004-05-07 | 2007-01-09 | Snap-On Incorporated | Decoding an alternator output signal |
| US7441616B2 (en) * | 2004-12-27 | 2008-10-28 | Nissan Motor Co., Ltd. | Generated power control system |
| US7327123B2 (en) * | 2005-02-02 | 2008-02-05 | Magnetic Applications, Inc. | Controller for AC generator |
| US20060220460A1 (en) * | 2005-03-31 | 2006-10-05 | Grolmes James M | Low voltage control module |
| US7586291B2 (en) * | 2005-03-31 | 2009-09-08 | Symbol Technologies, Inc. | System and method for controlling power of a computer terminal with an external power source |
| JP2007043825A (ja) * | 2005-08-03 | 2007-02-15 | Denso Corp | 車両用発電制御装置 |
| DE102005060129A1 (de) * | 2005-12-16 | 2007-06-21 | Bayerische Motoren Werke Ag | Verfahren zum Steuern eines Bordnetzes für ein Kraftfahrzeug |
| US7768165B2 (en) * | 2006-02-02 | 2010-08-03 | Magnetic Applications, Inc. | Controller for AC generator |
| CA2659087C (en) * | 2006-06-26 | 2014-12-09 | Azure Dynamics Inc. | Method, apparatus, signals, and media, for selecting operating conditions of a genset |
| KR100707102B1 (ko) * | 2006-07-07 | 2007-04-16 | 주식회사 두산 | 헬리코박터 파이로리 및 유해미생물의 증식을 억제하는 김치 유산균, 이를 이용한 김치의 제조방법 및 이의 용도 |
| US7479754B2 (en) * | 2006-10-17 | 2009-01-20 | Desa Ip Llc | Hybrid electric lawnmower |
| WO2008048618A2 (en) | 2006-10-17 | 2008-04-24 | Desa Ip. Llc | Hybrid electric device |
| US7728534B2 (en) | 2006-10-17 | 2010-06-01 | Mtd Products Inc | Hybrid electric lawnmower |
| US7884560B2 (en) * | 2006-10-17 | 2011-02-08 | Mtd Products Inc | Hybrid electric device |
| US8732896B2 (en) | 2006-10-17 | 2014-05-27 | Mtd Products Inc | Hybrid electric cleaning device |
| JP4957303B2 (ja) * | 2007-03-14 | 2012-06-20 | 株式会社明電舎 | 交流−交流直接変換装置の空間ベクトル変調方法 |
| DE102007014728A1 (de) * | 2007-03-24 | 2008-10-02 | Woodward Seg Gmbh & Co. Kg | Verfahren und Vorrichtung zum Betrieb einer doppeltgespeisten Asynchronmaschine bei transienten Netzspannungsänderungen |
| US8076873B1 (en) | 2007-06-01 | 2011-12-13 | Mtd Products Inc | Hybrid outdoor power equipment |
| JP4609474B2 (ja) * | 2007-10-10 | 2011-01-12 | 株式会社デンソー | 回転電機装置 |
| KR101381547B1 (ko) * | 2007-10-19 | 2014-04-17 | 대상에프앤에프 주식회사 | 병원성 세균의 생육을 억제하는 김치에서 분리한 신규류코노스톡 메센트로이드 및 이의 용도 |
| US8451627B2 (en) | 2007-11-16 | 2013-05-28 | Itron, Inc. | Devices and methods for converting alternating current (AC) power to direct current (DC) power |
| KR100946719B1 (ko) * | 2007-11-28 | 2010-03-12 | 영 춘 정 | 멀티프로그램이 가능한 가변속 무정류자 모터의 정풍량제어장치 |
| JP4798144B2 (ja) * | 2008-01-31 | 2011-10-19 | トヨタ自動車株式会社 | オルタネータ制御装置 |
| US8018108B2 (en) * | 2008-02-07 | 2011-09-13 | Magnetic Applications, Inc. | Compact high power alternator |
| US7795827B2 (en) | 2008-03-03 | 2010-09-14 | Young-Chun Jeung | Control system for controlling motors for heating, ventilation and air conditioning or pump |
| US8138710B2 (en) * | 2008-08-14 | 2012-03-20 | Sntech Inc. | Power drive of electric motor |
| US20100039074A1 (en) * | 2008-08-15 | 2010-02-18 | Baker Hughes Incorporated | Smart alternator |
| US8604756B2 (en) * | 2008-08-29 | 2013-12-10 | Pratt & Whitney Canada Corp. | Controlling transient response of a power supply |
| JP5460727B2 (ja) | 2009-10-16 | 2014-04-02 | 三菱電機株式会社 | 車両用電源システム |
| US8300440B2 (en) * | 2009-12-04 | 2012-10-30 | ConvenientPower HK Ltd. | AC-DC converter and AC-DC conversion method |
| US8310211B1 (en) * | 2009-12-17 | 2012-11-13 | Advanced Power Systems, LLC | Auto-regulated motion power system |
| US8773869B2 (en) * | 2010-03-29 | 2014-07-08 | Itron, Inc. | System and method for conversion of high voltage AC to low voltage DC using input voltage gating |
| JP5553677B2 (ja) * | 2010-05-06 | 2014-07-16 | 本田技研工業株式会社 | ハイブリッド式発動発電機の出力制御装置 |
| JP5008751B2 (ja) * | 2010-05-21 | 2012-08-22 | 三菱電機株式会社 | 電源装置 |
| US20140029200A1 (en) * | 2010-06-14 | 2014-01-30 | Marc A. Annacchino | High voltage power supply system and method |
| US8836292B1 (en) * | 2011-04-15 | 2014-09-16 | Kevin Mark Klughart | Electric power generation system and method |
| DE102012207809A1 (de) * | 2012-05-10 | 2013-11-14 | Robert Bosch Gmbh | Reichweitenverlängerer, Antrieb und Kraftfahrzeug |
| CN103490779B (zh) * | 2012-06-12 | 2016-12-14 | 中航商用航空发动机有限责任公司 | 永磁交流发电机模拟器 |
| CN102780257A (zh) * | 2012-08-17 | 2012-11-14 | 莫嘉林 | 汽车交流发电机 |
| DE102012108869A1 (de) * | 2012-09-20 | 2014-03-20 | Ebm-Papst Mulfingen Gmbh & Co. Kg | "Thermodynamische Kreisprozessanlage" |
| US20140177304A1 (en) * | 2012-12-24 | 2014-06-26 | Laurence P. Sadwick | Constant Current Source |
| FR3009658B1 (fr) * | 2013-08-12 | 2017-09-01 | Phlox | Appareil autonome et systeme comportant un tel appareil |
| US9475397B2 (en) * | 2014-01-28 | 2016-10-25 | Visedo Oy | Electronic power converter for a mobile working machine |
| US9665117B2 (en) * | 2014-06-02 | 2017-05-30 | Warner Power Acquisition, Llc | Method to improve the resolution of an SCR based power supply |
| US9608538B2 (en) * | 2014-12-19 | 2017-03-28 | Distech Controls Inc. | Common zero volt reference AC / DC power supply with positive and negative rectification and method of operation thereof |
| DE102015202912B3 (de) * | 2015-02-18 | 2016-03-24 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Ansteuern eines aktiven Brückengleichrichters bei Aufhebung eines Phasenkurzschlusses |
| US10870465B2 (en) * | 2015-05-22 | 2020-12-22 | Polaris Industries Inc. | Power boost regulator |
| US10793226B2 (en) * | 2015-05-22 | 2020-10-06 | Polaris Industries Inc. | Power boost regulator |
| CN106891744B (zh) * | 2015-12-18 | 2019-11-08 | 比亚迪股份有限公司 | 电动汽车及其车载充电器和车载充电器的控制方法 |
| CN106891748B (zh) * | 2015-12-18 | 2019-02-26 | 比亚迪股份有限公司 | 电动汽车及其车载充电器和车载充电器的控制方法 |
| KR101857781B1 (ko) | 2016-07-26 | 2018-05-15 | 주식회사 경신 | 인버터 기능을 갖는 전력 변환 장치 |
| US10644633B2 (en) | 2016-11-29 | 2020-05-05 | Mitsubishi Electric Corporation | Drive control device and drive control method |
| FR3062003B1 (fr) * | 2017-01-16 | 2020-01-03 | Valeo Equipements Electriques Moteur | Systeme de commande pour une machine electrique tournante |
| US10461671B2 (en) * | 2017-03-29 | 2019-10-29 | Qm Power, Inc. | Multispeed alternating current motor |
| KR102485380B1 (ko) * | 2017-11-30 | 2023-01-05 | 현대자동차주식회사 | 차량용 알터네이터 제어 장치 및 그 방법 |
| JP6488458B1 (ja) * | 2017-12-25 | 2019-03-27 | 株式会社テクノリンク | 生体刺激装置 |
| KR101899963B1 (ko) * | 2018-04-26 | 2018-09-18 | 주식회사 경신 | 인버터 기능을 갖는 전력 변환 장치 |
| KR101899962B1 (ko) * | 2018-04-26 | 2018-09-18 | 주식회사 경신 | 인버터 기능을 갖는 전력 변환 장치 |
| AU2019335065B2 (en) | 2018-09-03 | 2024-07-18 | Milspec Technologies Pty Ltd | A DC to DC converter for a vehicle alternator |
| EP3626489A1 (en) | 2018-09-19 | 2020-03-25 | Thermo King Corporation | Methods and systems for energy management of a transport climate control system |
| EP3626490A1 (en) | 2018-09-19 | 2020-03-25 | Thermo King Corporation | Methods and systems for power and load management of a transport climate control system |
| US11273684B2 (en) | 2018-09-29 | 2022-03-15 | Thermo King Corporation | Methods and systems for autonomous climate control optimization of a transport vehicle |
| US11034213B2 (en) | 2018-09-29 | 2021-06-15 | Thermo King Corporation | Methods and systems for monitoring and displaying energy use and energy cost of a transport vehicle climate control system or a fleet of transport vehicle climate control systems |
| US10875497B2 (en) | 2018-10-31 | 2020-12-29 | Thermo King Corporation | Drive off protection system and method for preventing drive off |
| US11059352B2 (en) | 2018-10-31 | 2021-07-13 | Thermo King Corporation | Methods and systems for augmenting a vehicle powered transport climate control system |
| US10926610B2 (en) | 2018-10-31 | 2021-02-23 | Thermo King Corporation | Methods and systems for controlling a mild hybrid system that powers a transport climate control system |
| US11022451B2 (en) | 2018-11-01 | 2021-06-01 | Thermo King Corporation | Methods and systems for generation and utilization of supplemental stored energy for use in transport climate control |
| US11554638B2 (en) | 2018-12-28 | 2023-01-17 | Thermo King Llc | Methods and systems for preserving autonomous operation of a transport climate control system |
| WO2020142065A1 (en) | 2018-12-31 | 2020-07-09 | Thermo King Corporation | Methods and systems for providing feedback for a transport climate control system |
| EP3906175A1 (en) | 2018-12-31 | 2021-11-10 | Thermo King Corporation | Methods and systems for providing predictive energy consumption feedback for powering a transport climate control system using external data |
| WO2020142063A1 (en) | 2018-12-31 | 2020-07-09 | Thermo King Corporation | Methods and systems for providing predictive energy consumption feedback for powering a transport climate control system |
| US12072193B2 (en) | 2018-12-31 | 2024-08-27 | Thermo King Llc | Methods and systems for notifying and mitigating a suboptimal event occurring in a transport climate control system |
| US11072321B2 (en) | 2018-12-31 | 2021-07-27 | Thermo King Corporation | Systems and methods for smart load shedding of a transport vehicle while in transit |
| CN109756099A (zh) * | 2019-03-26 | 2019-05-14 | 西安霍威电源有限公司 | 一种交直流混合的电源模块 |
| EP3789221B1 (en) | 2019-09-09 | 2024-06-26 | Thermo King LLC | Prioritized power delivery for facilitating transport climate control |
| US11376922B2 (en) | 2019-09-09 | 2022-07-05 | Thermo King Corporation | Transport climate control system with a self-configuring matrix power converter |
| US11214118B2 (en) | 2019-09-09 | 2022-01-04 | Thermo King Corporation | Demand-side power distribution management for a plurality of transport climate control systems |
| US11420495B2 (en) | 2019-09-09 | 2022-08-23 | Thermo King Corporation | Interface system for connecting a vehicle and a transport climate control system |
| US10985511B2 (en) | 2019-09-09 | 2021-04-20 | Thermo King Corporation | Optimized power cord for transferring power to a transport climate control system |
| US11135894B2 (en) | 2019-09-09 | 2021-10-05 | Thermo King Corporation | System and method for managing power and efficiently sourcing a variable voltage for a transport climate control system |
| US11458802B2 (en) | 2019-09-09 | 2022-10-04 | Thermo King Corporation | Optimized power management for a transport climate control energy source |
| US11203262B2 (en) | 2019-09-09 | 2021-12-21 | Thermo King Corporation | Transport climate control system with an accessory power distribution unit for managing transport climate control loads |
| US11794551B2 (en) | 2019-09-09 | 2023-10-24 | Thermo King Llc | Optimized power distribution to transport climate control systems amongst one or more electric supply equipment stations |
| US11588380B2 (en) | 2019-09-23 | 2023-02-21 | Seabourne Solutions, Llc | Power generator |
| WO2021066996A1 (en) * | 2019-10-04 | 2021-04-08 | Borgwarner Inc. | Method of duty cycle generation for extending the linear modulation range in a pulse width modulated voltage source inverter |
| CN110829914B (zh) * | 2019-11-08 | 2021-07-09 | 陕西航空电气有限责任公司 | 一种三相交流发电机宽范围短路限流装置 |
| US11489431B2 (en) | 2019-12-30 | 2022-11-01 | Thermo King Corporation | Transport climate control system power architecture |
| US11876445B2 (en) * | 2020-10-05 | 2024-01-16 | Infineon Technologies Austria Ag | Trans-inductance multi-phase power converters and control |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2533375A1 (fr) | 1982-09-22 | 1984-03-23 | Renault | Dispositif generateur d'energie electrique pour vehicule, a alternateur polyphase et regulateur de tension |
| US5606244A (en) * | 1993-08-05 | 1997-02-25 | Ofer Energies Ltd. | Mobile AC power source system |
| US20020176266A1 (en) | 2000-01-24 | 2002-11-28 | Perreault David J. | Load matched alternator system with fault protection |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4164785A (en) * | 1976-09-27 | 1979-08-14 | Tenna Power Corporation | Multiphase to single phase and frequency converter system |
| DE3785992T2 (de) * | 1986-10-16 | 1994-01-13 | Cadac Holdings Ltd | Alternator und hierfür angewendeter Regler. |
| JPS63261697A (ja) * | 1987-04-18 | 1988-10-28 | 林原 健 | ランプ点燈用電源装置 |
| JP2576233B2 (ja) * | 1989-07-13 | 1997-01-29 | 三菱電機株式会社 | 車両用交流発電機の制御装置 |
| US5039932A (en) * | 1989-08-09 | 1991-08-13 | Sundstrand Corporation | Integrated variable reluctance generator for air frames |
| US5233286A (en) * | 1991-07-29 | 1993-08-03 | Sundstrand Corporation | Hybrid 270 volt DC system |
| US5594322A (en) * | 1993-05-12 | 1997-01-14 | Sundstrand Corporation | Starter/generator system with variable-frequency exciter control |
| JP2767781B2 (ja) * | 1993-09-17 | 1998-06-18 | 東光株式会社 | Ac−dcコンバータ |
| JPH08221141A (ja) * | 1995-02-14 | 1996-08-30 | Mitsubishi Electric Corp | 電源回路 |
| AU760415B2 (en) * | 1999-09-14 | 2003-05-15 | Ge Transportation Systems Global Signaling, Llc | Methods and system for generating electrical power from a pressurized fluid source |
| US6188588B1 (en) * | 1999-10-07 | 2001-02-13 | International Business Machine Corporation | Switching controller and method for operating a flyback converter in a critically continuous conduction mode |
| DE60009892T2 (de) * | 2000-07-31 | 2005-04-21 | St Microelectronics Srl | Stromversorgungsgerät mit Fehlfunktionserkennung |
| US6768656B2 (en) * | 2002-01-28 | 2004-07-27 | Salvador Figueroa | Power converter with input-side resonance and pulse-position demodulation feedback control |
| JP2004282826A (ja) * | 2003-03-13 | 2004-10-07 | Honda Motor Co Ltd | エンジン駆動式発電機 |
-
2004
- 2004-06-02 US US10/860,393 patent/US7176658B2/en not_active Expired - Fee Related
- 2004-06-02 EP EP04754224A patent/EP1634357A2/en not_active Withdrawn
- 2004-06-02 KR KR1020057023235A patent/KR101102802B1/ko not_active IP Right Cessation
- 2004-06-02 CA CA002528145A patent/CA2528145A1/en not_active Abandoned
- 2004-06-02 MX MXPA05013014A patent/MXPA05013014A/es active IP Right Grant
- 2004-06-02 WO PCT/US2004/017571 patent/WO2004109892A2/en active Search and Examination
- 2004-06-02 KR KR1020117021307A patent/KR101172340B1/ko not_active IP Right Cessation
- 2004-06-02 JP JP2006515149A patent/JP4758890B2/ja not_active Expired - Fee Related
- 2004-06-02 CN CN2004800204041A patent/CN101015114B/zh not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2533375A1 (fr) | 1982-09-22 | 1984-03-23 | Renault | Dispositif generateur d'energie electrique pour vehicule, a alternateur polyphase et regulateur de tension |
| US5606244A (en) * | 1993-08-05 | 1997-02-25 | Ofer Energies Ltd. | Mobile AC power source system |
| US20020176266A1 (en) | 2000-01-24 | 2002-11-28 | Perreault David J. | Load matched alternator system with fault protection |
Non-Patent Citations (1)
| Title |
|---|
| IEEE 논문(제목: Topologies and Design Considerations for Distributed Power System Applications), 발표일 2001.06* |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4758890B2 (ja) | 2011-08-31 |
| US7176658B2 (en) | 2007-02-13 |
| CN101015114B (zh) | 2011-06-01 |
| US20050146308A1 (en) | 2005-07-07 |
| WO2004109892A2 (en) | 2004-12-16 |
| CN101015114A (zh) | 2007-08-08 |
| KR20110105406A (ko) | 2011-09-26 |
| MXPA05013014A (es) | 2006-08-23 |
| WO2004109892A3 (en) | 2005-07-28 |
| JP2006526980A (ja) | 2006-11-24 |
| EP1634357A2 (en) | 2006-03-15 |
| KR20060063792A (ko) | 2006-06-12 |
| KR101172340B1 (ko) | 2012-08-14 |
| CA2528145A1 (en) | 2004-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101102802B1 (ko) | 영구 자석 교류기용 제어기 | |
| US5942818A (en) | Control apparatus for engine-driven permanent magnet type synchronous generators | |
| US6556462B1 (en) | High power factor converter with a boost circuit having continuous/discontinuous modes | |
| US9294001B2 (en) | Power converter with dead-time control function | |
| US6137700A (en) | Converter with a high power factor using a DC center point voltage | |
| US8508961B2 (en) | Power conversion apparatus | |
| US7049786B1 (en) | Unipolar drive topology for permanent magnet brushless DC motors and switched reluctance motors | |
| AU745967B2 (en) | Converter | |
| CN102099992B (zh) | 电源装置 | |
| US6111768A (en) | Multiple voltage alternator system | |
| KR950035037A (ko) | 유도부하에 대한 제어회로 | |
| US20210288506A1 (en) | Power system of electric vehicle | |
| EP0740389B1 (en) | Generating apparatus | |
| KR100978027B1 (ko) | 전력 회생 효율 증강 시스템 | |
| JP2003111203A (ja) | 車両用回転電機駆動装置 | |
| JPH09261963A (ja) | コンバータ回路 | |
| JP2850742B2 (ja) | 充電器 | |
| US5652699A (en) | High-voltage and high-power stabilized DC power supply using modified sine wave output 3-phase inverter | |
| JP2002374696A (ja) | モータの駆動装置 | |
| US10547259B1 (en) | Electric generating system with an interleaved DC-DC converter | |
| JPH09322545A (ja) | 永久磁石発電機の電圧制御装置 | |
| Ojo et al. | Permanent-magnet machines | |
| KR101810339B1 (ko) | 유압력을 이용한 전기 발생장치 | |
| KR920009549B1 (ko) | 영구자석형 자동차 발전기용 전압 안정화 방식 | |
| JP2001078462A (ja) | 車両用モータ駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| A107 | Divisional application of patent | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| LAPS | Lapse due to unpaid annual fee |