KR100973104B1 - 위치 결정 네트워크에서 로빙 위치 수신기의 위치를결정하는 방법 및 시스템 - Google Patents
위치 결정 네트워크에서 로빙 위치 수신기의 위치를결정하는 방법 및 시스템 Download PDFInfo
- Publication number
- KR100973104B1 KR100973104B1 KR1020077025280A KR20077025280A KR100973104B1 KR 100973104 B1 KR100973104 B1 KR 100973104B1 KR 1020077025280 A KR1020077025280 A KR 1020077025280A KR 20077025280 A KR20077025280 A KR 20077025280A KR 100973104 B1 KR100973104 B1 KR 100973104B1
- Authority
- KR
- South Korea
- Prior art keywords
- positioning
- signal
- carrier
- time
- frequency
- Prior art date
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S1/00—Beacons or beacon systems transmitting signals having a characteristic or characteristics capable of being detected by non-directional receivers and defining directions, positions, or position lines fixed relatively to the beacon transmitters; Receivers co-operating therewith
- G01S1/02—Beacons or beacon systems transmitting signals having a characteristic or characteristics capable of being detected by non-directional receivers and defining directions, positions, or position lines fixed relatively to the beacon transmitters; Receivers co-operating therewith using radio waves
- G01S1/08—Systems for determining direction or position line
- G01S1/20—Systems for determining direction or position line using a comparison of transit time of synchronised signals transmitted from non-directional antennas or antenna systems spaced apart, i.e. path-difference systems
- G01S1/24—Systems for determining direction or position line using a comparison of transit time of synchronised signals transmitted from non-directional antennas or antenna systems spaced apart, i.e. path-difference systems the synchronised signals being pulses or equivalent modulations on carrier waves and the transit times being compared by measuring the difference in arrival time of a significant part of the modulations, e.g. LORAN systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/03—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers
- G01S19/10—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers providing dedicated supplementary positioning signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/23—Testing, monitoring, correcting or calibrating of receiver elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/24—Acquisition or tracking or demodulation of signals transmitted by the system
- G01S19/25—Acquisition or tracking or demodulation of signals transmitted by the system involving aiding data received from a cooperating element, e.g. assisted GPS
- G01S19/256—Acquisition or tracking or demodulation of signals transmitted by the system involving aiding data received from a cooperating element, e.g. assisted GPS relating to timing, e.g. time of week, code phase, timing offset
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/0009—Transmission of position information to remote stations
- G01S5/0081—Transmission between base stations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/0009—Transmission of position information to remote stations
- G01S5/009—Transmission of differential positioning data to mobile
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/021—Calibration, monitoring or correction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/0226—Transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0284—Relative positioning
- G01S5/0289—Relative positioning of multiple transceivers, e.g. in ad hoc networks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/14—Determining absolute distances from a plurality of spaced points of known location
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/14—Determining absolute distances from a plurality of spaced points of known location
- G01S5/145—Using a supplementary range measurement, e.g. based on pseudo-range measurements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W56/00—Synchronisation arrangements
- H04W56/001—Synchronization between nodes
- H04W56/0015—Synchronization between nodes one node acting as a reference for the others
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W56/00—Synchronisation arrangements
- H04W56/0055—Synchronisation arrangements determining timing error of reception due to propagation delay
- H04W56/0065—Synchronisation arrangements determining timing error of reception due to propagation delay using measurement of signal travel time
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/43—Determining position using carrier phase measurements, e.g. kinematic positioning; using long or short baseline interferometry
Abstract
본 발명은 로빙 위치 수신기가 자신의 위치를 결정할 수 있도록 하는 포지셔닝 시스템 및 방법에 관한 것이다. 포지셔닝 시스템은 다른 포지셔닝-유닛 장치 및/또는 다른 적격의 기준 포지셔닝 신호원으로부터 하나 이상의 기준 포지셔닝 신호를 수신하는 특화된 트랜시버(이하 포지셔닝-유닛 장치라고 함)를 포함한다. 상기 수신된 포지셔닝 신호의 각각은 바람직하게는 캐리어 성분, 의사랜덤 코드 성분, 및 데이터 성분을 포함한다. 상기 포지셔닝-유닛 장치는 수신된 기준 포지셔닝 신호와 그들의 알려진 위치에 반응하여 고유 포지셔닝 신호를 생성한다. 고유 포지셔닝 신호는 수신된 기준 포지셔닝 신호의 하나 이상의 캐리어 성분에 연대순으로 동기화된 캐리어 성분, 수신된 기준 포지셔닝 신호의 하나 이상의 의사랜덤 코드 성분에 연대순으로 동기화된 의사랜덤 코드 성분, 및 수신된 기준 포지셔닝 신호의 하나 이상의 데이터 성분에 연대순으로 동기화된 데이터 성분을 갖는다. 일단 포지셔닝-유닛 장치가 기준 전송기에 연대순으로 동기화되면, 네트워크에 연결되는 다른 포지셔닝-유닛 장치는 그것의 전송된 고유 포지셔닝 신호를 기준 포지셔닝 신호로서 사용할 수 있다. 이들 연대순으로 동기화된 포지셔닝-유닛 장치의 지리적 분포는 상당한 지리적 영역에 대해 기준 시간축을 전달하는 포지셔닝 신호의 시간-동기 네트워크를 생성한다. 포지셔닝 시스템은 또한 로빙 위치 수신기를 포함한다. 로빙 위치 수신기는 수신된 연대순으로 동기화된 의사랜덤 코드와 데이터 성분 각각에 대해 범위 측정을 함으로써 코드-기반 싱글-포인트 위치 결정을 생성할 수 있고, 수신된 연대순으로 동기화된 캐리어 성분들의 각각에 대해 범위 측정을 함으로써 캐리어-기반 싱글 포인트 위치 결정을 생성할 수 있다. 로빙 위치 수신기는 코드와 캐리어-기반 싱글 포인트 솔루션 모두를 자체적으로 계산할 수 있으며 나아가 차동 보정이나 네트워크 내에서 시간 정확성의 필요없이 자신의 위치를 계산할 수 있다.
로빙, 수신기, 포지셔닝, 위치, 트랜시버
Description
본 발명은 일반적으로 모바일 기기에 대한 정밀한 위치결정을 생성하는 시스템 및 방법에 관한 것이다. 특히, 본 발명은 정밀한 도착시간 포지셔닝 시스템에 적용된다. 본 발명은, 전송기 비이콘(beacon) 사이의 물리적 접속이나, 각 전송기에 원자 시간 표준기가 연결될 필요나, 디퍼렌셜 보정기술(differential correction technique)과 같은 종래기술의 요구사항에 의해 제약을 받지 않는다.
종래, 정밀한 도착시간 위치 결정은 사용된 송신시 클럭의 정확도에 의존한다는 것이 잘 알려져 있다. 가장 원시적인 형태로는, 알고 있는 위치에 배치되고 3개의 동일 길이의 케이블로 공통 시계에 연결된 3개의 전송기 비이콘이 도착시간 포지셔닝 시스템의 기초로서 충분할 것이다. 그러나 이 원시적인 위치결정 시스템은 비이콘 사이에 예상되는 먼 거리에 걸쳐 고주파 타이밍신호를 배포하는 정밀 시한(timed) 케이블을 요구하기 때문에 제조 및 설치상 아주 비실용적이다. 또는, 로빙률(drift rate)이 아주 낮은 정밀 원자 시간 표준기 각각의 전송기 비이콘에 설치되고, 알고 있는 위치에 배치되고 레퍼런스 시간축(timebase)에 연결된 레퍼런 스 수신기를 사용하여 모니터 될 수 있다. 전송기 비이콘으로부터 수신된 포지셔닝 신호에 응답하여, 사용자 기기에 이후 재전송을 위해, 레퍼런스 수신기로부터 각 비이콘에 RF 데이터 링크를 통해서 클럭 보정(clock corrections)이 보내진다. GPS - 이 GPS 위성에는 세슘-루비듐 시간표준기가 각각 설치됨- 와 같은 최근의 위성 포지셔닝 기술에서는, GPS 그라운드 콘트롤 세그먼트를 가지고, 모든 GPS 위성을 계속해서 모니터링하고 24시간마다 각 위성에 클럭 보정을 업링킹(up-linking)하는 이 기술을 채용한다. 그 후 이들 보정은 각 위성의 내비게이션 메시지를 통해서 GPS 사용자 기기에 재방송되므로, GPS 사용자 기기 내의 포지셔닝 알고리즘은 위성 클럭 오차를 밝힐 수 있다. 시야의 적어도 4개의 GPS 위성에 의해서, 3차원적인 위치가 종래의 코드-기반 GPS 위치 솔루션으로 알려진 표준 기술을 사용하는 GPS 사용자 기기에서 달성될 수 있다. 이 표준 기술은 또한 본 발명이 속하는 기술분야의 당업자에 의해서 "단일점 위치(a single point position)"으로 일반적으로 불려진다.
종래의 코드-기반 GPS 위치
솔루션
(
단일점
위치)
종래의 코드-기반 GPS에서는, 위도, 경도, 및 지상에 가까운 임의의 점의 고도가 가시범위의 적어도 4개의 위성에서 나오는 포지셔닝 신호의 전파 시간으로부터 계산될 수 있다. 하나의 GPS 수신기는 내부적으로 생성된 의사난수 코드 (pseudorandom code: PRN) 시이퀀스와 각각의 GPS 위성으로부터 수신된 의사난수 코드 시이퀀스와의 상호관계에 기초하여 거리 계산을 한다. 상기 계산된 거리는 위성의 클럭과 GPS 수신기의 클럭 사이에 시간 차이, 또는 오프셋(offset)이 있기때문에 의사거리(pseudorange)로 지칭된다. 위성의 의사난수코드 시이퀀스 송신과 GPS 수신기에 의한 상기 의사난수코드 시이퀀스 사이의 경과시간을 정확하게 측정하기 위해서는 상기 수신기의 클럭이 위성군(satellite constellation)의 클럭과 동기가 보장될 필요가 있다. 타이밍 정보와, 위성궤도 정보와 위성 클럭 보정 항(term)을 포함하는 내비게이션 메시지가 각 위성으로부터 또한 전송된다. 3차원적인 포지셔닝을 위해서, GPS 수신기는 4개의 미지수 위치(x, y, z)와 시간(t)를 결정하기 위해 4개의 위성 신호가 필요하다. 2차원(2-D)적인 포지셔닝을 위해서는, 고도가 고정되고, 3개의 미지수인 위치(x, y)와 시간(t)을 결정하기 위해 3개의 위성 신호가 필요하다. 종래의 코드-기반 GPS 위치 솔루션은 적어도 4개의 시야의 위성에 의해 대략 10 내지 20 m 의 정확도로 3차원(3-D) 절대 위치 결정을 할 수 있는 능력을 GPS 수신기에 제공한다.
이러한 종래의 코드-기반 GPS 위치 솔루션은 레퍼런스 수신기로부터의 디퍼렌셜 보정데이터 없이, 위치, 속도 및 시간을 결정할 수 있는 자치 솔루션(autonomous solution)이다. 그러므로 당해 기술분야에서 "단일점" 위치 결정이라고 알려지게 되었다.
종래의 코드-기반
디퍼렌셜
(differential) GPS(상대적
포지셔닝
)
상비된 정확한 원자 시간축(timebase)을 가지고, GPS군은 하나의 GPS 수신기에 대략 10 내지 20 m 정확도의 3차원 절대 위치 결정을 제공할 수 있을 뿐이다. 이는 다음 6가지의 주요 오차 발생원 즉: (1) 전리층 지연, (2) 대류권 지연, (3) 위성 성력오차(ephemeris error), (4) 위성 클럭 오차, (5) GPS 수신기 노이즈, (6) 다중경로 등으로부터의 포지셔닝 신호의 멸실 때문이다. 전리층 지연은 전자기파가 전리층의 이온입자 대역을 통과할 때 생기는 가변적인 시간 지연이다. 대류권 지연은 전자기파가 하부 대기권의 습기를 통과할 때 생기는 시간 지연이다. 위성 성력오차는 실제 위성 위치와, 위성 궤도 데이터에 의해서 추정된 위치 사이의 차이이다. 수신기 노이즈는 GSP 수신기의 내부 전자부품에 의해서 발생된 노이즈이다. 다중경로는, GPS 수신기에 아주 근접하여, 국지적인 신호반사에 의해서 야기된 신호지연이다. 이들 대부분의 오차 발생원은 상대적으로 짧은 거리(즉, 수십 km)에 걸쳐 공간적으로 상호연관된다. 이것은 서로 근접한 2개의 다른 GPS 수신기가 동일한 오차를 관측할 수 있다는 것을 의미한다. 그러므로 "디퍼렌셜 보정(differential correction)"이라는 기술을 사용하여 공간적으로 상호연관된 오차를 개선할 수 있다. 잘 알려진 위치에 배치된 레퍼런스 수신기는 검출하는 각 위성신호에 대한 상정한 의사거리를 계산한다. 다음에 GPS 위성으로부터 수신 의사거리를 측정하고 수신 의사거리로부터 상기 상정한 의사거리를 감산하여 각 가시범위의 위성에 대한 디퍼렌셜 거리 보정을 한다. 다음에 상기 레퍼런스 수신기는 이들 보정을 디지털 데이터로 RF 데이터 링크를 경유해서 GPS 수신기로 보낸다. 그 다음에 GPS 수신기는 위치 솔루션을 계산하기 전에 측정한(레퍼런스 수신기에 대한 시야의 동일한 위성들의) 의사거리에 이들 보정치를 더한다. 레퍼런스 수신기와 GPS 수신기 모두에 공통인 오차는 이 절차에 의해서 완전히 제거된다. 가중경로와 노이즈와 같이 상호 연관되지 않은 오차 발생원은 의사거리에 잔존하며 결과적으로 위치 정확도를 저하시킨다. 낮은 다중경로 환경에서는 수미터의 위치 정확도가 코드-기반 디퍼렌셜 GPS 보정에 의해서 달성될 수 있다.
종래의
캐리어
-기반
디퍼렌셜
GPS(상대적
포지셔닝
)
종래의 캐리어-기반 디퍼렌셜 GPS(CDGPS)는, 레퍼런스 수신기와 사용자 수신기에서 측정된 상기 위성의 캐리어 위상 사이의 차이를 사용하여, 레퍼런스 위치와 사용자 위치 사이의 차이를 산출한다. 잘 알려진 위치에 설치된 CDGPS 레퍼런스 수신기는 가시범위내의 모든 위성에 대해 동시 캐리어 위상 측정치를 산출한 다음, 캐리어 위상 데이터를 RF 데이터 링크를 경유해서 상기 사용자 수신기에 브로드캐스트한다. 또한 사용자 수신기는 시야의 모든 위성에 대해서 동시 위상 측정치를 산출하고, 그 후에 레퍼런스 수신기에 대한 사용자 수신기의 위치를 결정하기 위하여 위상차를 계산한다. 상기 캐리어 위상 측정치는 GPS 위성으로부터의 캐리어 주파수에 존재하는 도플러 주파수 편이에 기초한 실행 사이클 카운트이다. 각 시기(epoch)에, 이 실행 사이클 카운트(이전 시기의 값에 현재 시기 동안의 위상의 선행을 더함)는 상기 수신기로부터 이용 가능하다. 더욱 상세하게는, 한 시기 동안의 캐리어 위상의 선행은 상기 시기의 사이에 캐리어 도플러 오프셋의 통합 즉 통합 캐리어 위상(Integrated Carrier Phase: ICP)에 의해 결정된다.
사용자 수신기는 소량의 위상과 캐리어의 임의의 전체 사이클 수의 합을 측정할 수 있으나, 직접적으로 상기 의사거리의 전체 사이클의 정확한 수를 결정할 수는 없다. "정수 사이클 모호성"으로 알려진 이 숫자는 다른 수단에 의해서 결정되어야 한다. 캐리어 위상 정수 모호성을 해결하는 전통적인 방법은 3개의 대분류: 탐색방법, 필터링방법, 및 기하학적방법으로 귀결된다. 이들 전통적인 방법들은 즉시성의 정수 사이클 모호성 해결책을 주지는 않는다. "와이드-레이닝(wide-laning)"으로 알려진 기술이 상기 비즉시성의 정수 사이클 모호성 문제를 극복하기 위해서 개발되었다. 와이드-레이닝은 2개의 캐리어 주파수(전통적으로 GPS L1과 L2)를 곱하고 필터링하여 비트 주파수 신호(beat frequency signal)를 구성한다. 이 비트 주파수 파장은 상기 2개의 개별 캐리어의 파장보다 훨씬 길다. 결과적으로, 상기 정수의 결정은 상기 비트 주파수 신호에 의해서 구성된 더 넓은 "레인들(lanes)"을 갖는 정수 모호성을 해결하기 위해 의사거리 관측을 사용하여 달성될 수 있다.
CDGPS 방법에 대한 주요 제약은, 첫째로 RF 데이터 링크의 무결성과 지연이고, 둘째로, 사용자 수신기에서 시간 결정이 안된다는 것이다. 상기 RF 데이터 링크의 데이터 대역폭은 디퍼렌셜 데이터 갱신속도(update rates)를 제한하여, 데이터 지연을 초래하고 위치 정확도를 저하시킨다. 이들은 그 결과 상기 정수 모호성을 해결하기 위해 탐색되어야 하는 정수의 볼륨을 크게 감소시킨다.
물리적 장애와 다중경로에 의해서 야기된 디퍼렌셜 데이터의 불량한 수신은 테이터 멸실을 초래하여, 최선의 경우 위치 정확도를 저하시키고, 최악의 경우 전체 링크의 장애와 위치 갱신이 되지 않는 결과를 낳는다.
CDGPS의 두번째 결점은 시간 결정을 할 수 없다는 것이다.
종래의 단일점 위치 결정 솔루션은 4개의 미지의 위치(x, y, z)와 시간(t)에 대해 해결책을 제공한다. CDGPS는 "이중차(double difference)"라고 하는 프로세스를 사용하는데, 이것은 레퍼런스 수신기와 사용자 수신기 모두에 대해서 수신기 클럭 항(terms)을 제거한다. 그러므로 사용자 수신기는 러퍼런스 수신기 위치에 대해서 정확한 위치를 결정할 수 있으나, 시간을 결정할 수는 없다. 사용자가 단지 위치에만 관심이 있다면 이것은 중요하지 않다. 그러나, 정확한 시스템 시간축에 대한 정밀한 지식은 컴퓨터 네트워크와 통신시스템을 포함하는 많은 사용자 애플케이션에 아주 유익하다. 시간 결정을 할 수 없다는 것은 CDGPS 종래 시스템과 관련된 주된 문제점이다.
의사위성 보강(
pseudolite
Augmentation)
GPS 위치 결정을 보조하는데 사용된 또 다른 접근은 의사위성(pseudolite)과 같은 지상보강시스템(Ground-based Augmentation System)이다. 의사위성은 어떤 추가적인 하부구조 요구사항 없이 종래의 코드 및 캐리어-기반 디퍼렌셜 GPS 시스템(Conventional Code and Carrier-based Diffferential GPS System)에 병합될 수 있다.
그것들은 추가적인 거리 신호(ranging signal), 및 사용자 기기에 디퍼렌셜 보정치를 보내는 RF 데이터 링크로서도 사용될 수 있다. 또한, 의사위성은 GPS 시간축에 동기화 될 수 있다. GPS 수신기는 적어도 4개의 GPS 위성을 사용하는 종래의 코드-기반 GPS 솔루션으로부터 GPS 시간을 결정하고, 그 결정된 시간을 함께 위 치된(co-located) 의사위성 전송기에 전달한다. 상기 GPS 시간축의 정확도는, 전리층 및 대류권 지연, 위성 클럭 오차, 위성 위치 오차, 수신기 노이즈, 및 다중경로를 포함하는 GPS 오차 발생원인에 의해서 제한된다. 대략 50 내지 100ns의 시간 정확도가 GPS 시간축 방법에 의해서 달성될 수 있지만, 이것은 겨우 수십 미터 차수의 위치 정확도로 해석된다. 이 정확도는 정밀 내비게이션 시스템을 위해서는 너무나 조잡하다.
Omni
-marker 의사위성을 사용하는
캐리어
-기반
디퍼렌셜
GPS
코헨의 미국 특허 제 5,583,513호 발명 "정밀한 코드-기반 및 캐리어 위상 위치 결정을 생성하는 시스템 및 방법"에는, 소위 "옴니-마커(omni-marker)" 의사위성이, 디퍼렌셜 거리 보정을 하는 위치 수신기에, 정보를 중계하는 채널로서 기능하는 디퍼렌셜 보정 방법이 개시되어 있다(6 칼럼, 43행 내지 46행). 상기 옴니-마커 의사위성은 은유적 거울(metaphorical mirror)로서 설명될 수 있는데, 그에 의해서 GPS 위성 신호는 이미 알고 있는 옴니-마커 의사위성 위치로부터 상기 위치 수신기로 동위상으로 반사된다. 그리하여, 상기 비이콘 마커 신호들 각각의 발신 캐리어 및 PRN 코드 성분은 GPS 신호의 수신 대응 성분에 대해 정확하게 위상 일치한다(6칼럼, 28행 내지 32행). 공중을 비행하는 비행기에 위치한 위치 수신기는 GPS 위성으로부터 위치결정 신호를 수신하고, 또한, omni-marker 의사위성으로부터 "반사된" GPS 위치결정 신호를 수신하여, 그 후 디퍼렌셜 거리 측정치를 계산한다.
코헨의 디퍼렌셜 방법은, 종래의 코드 및 캐리어-기반 디퍼렌셜 시스템에 의 해 요구되는 것과 같은 전통적인 디지털 데이터 링크의 필요성을 제거한다. 그러나, 옴니-마커 위치 수신기는 디퍼렌셜 거리 측정치를 계산하기 위해 여전히 GPS 위성 및 옴니-마커 신호 모두를 수신해야만 한다. 옴니-마커 신호만 수신해서는 위치계산을 할 수 없을 것이다. 또한, 옴니-마커는 시야의 GPS 위성에 대한 개별적인 캐리어-PRN 성분을 생성하여 송신해야하므로, 상기 옴니-마커는 복잡하고 고가로 된다. 현재, 이것은 단일 옴니-마커로부터 12개 이상의 개별 송신을 요구한다. 또한, 옴니-마커 위치 수신기는 종래의 디퍼렌셜 GPS 수신기의 수신채널의 2배를 요구하므로 비용과 복잡도를 가중한다.
"그라운드
트랜스시버
" 수도라이트를 이용한 미분 범위 측정
"그라운드 트랜스시버의 네트워크"이라는 명칭을 갖는, 셰인블랫(Sheynblat)의 미국특허 제6,121,928호는 미분 정정 방법을 설명하는데, 이 방법에 의하면 소위 "그라운드 전송기" 및 "그라운드 트랜스시버" 수도라이트(pseudolite)의 네트워크는 사용자 위치의 미분적 결정을 위해 위치 수신기로 정보를 릴레이하는 채널로서 기능한다(칼럼 5, 라인 31 내지 36). 셰인블랫은 마스터 클럭 바이어스를 극복하고(칼럼 5, 라인 23 내지 36), 그라운드 트랜스시버 하드웨어에 의해 도입된 라인 바이어스를 극복하기 위한(칼럼 5, 라인 38 내지 67 및 칼럼 6, 라인 1 내지 23) 미분적 정정의 사용을 가르친다. 셰인블랫의 미분적 방법론과 실시예는 다음을 포함한다: (i) 그라운드 전송기 신호와 그라운드 트랜스시버 신호를 구별짓는 사용자 수신기(칼럼 5, 라인 31 내지 36, 및 청구항 2), (ii) 그라운드 트랜스시버와 다수의 마스터 그라운드 전송기 신호를 구별짓는 사용자 수신기(칼럼 6, 라인 25 내지 67, 칼럼 7, 라인 1 내지 33), 및 (iii) 위성 신호와 구별지워진 신호들을 통합하고 있는 그라운드 트랜스시버 신호를 구별짓는 사용자 수신기(칼럼 7, 라인 34 내지 67, 칼럼 8, 라인 1 내지 34). 셰인블랫의 특허는 미분적 방법론의 도래를 가르치나, 그라운드 트랜스시버의 네트워크로부터 유동 위치 수신기에 있는 단일점 위치 솔루션을 생산하는 매우 바람직한 시스템을 가르치지도, 도시하지도, 또는 시사하지도 않는다.
종래 기술의 시스템은 도착시간 위치 결정에 있어서, (a) 전송기 비이콘 사이의 물리적 연결; (b) 각 전송기의 원자 시간 표준기; (c) GPS 시간축에의 동기화; 또는 (d) 임의 형태의 디퍼렌셜 보정 중 적어도 하나를 요구한다. 이들 제약사항들 중 어떤 것도 없이 아주 정확한 도착시간 위치 결정 신호를 제공할 수 있는 시스템이 매우 바람직하다.
본 발명은, 하기에 설명된 바와 같이, 트랜시버(이하, 포지셔닝-유닛 장치(Positioning-Unit Devices: PUD)라 함) 시스템을 시간적으로 동기화시키므로써 이 바람직한 목표를 달성한다.
발명의 목적
본 발명의 목적은, PUD 사이에 물리적인 상호접속의 필요없이 정밀한 코드 및 캐리어 위상 위치 결정을 하는 포지셔닝 시스템 및 방법을 제공하는 것이다.
본 발명의 추가적인 목적은, 원자 시간 표준기 없이 정밀한 코드 및 캐리어 위상 위치 결정을 하는 포지셔닝 시스템 및 방법을 제공하는 것이다.
본 발명의 추가적인 목적은, 위성항법시스템(Global Navigation Satellite System: GNSS) 시간축의 필요없이 코드 및 캐리어 위상 위치 결정을 하는 포지셔닝 시스템 및 방법을 제공하는 것이다.
본 발명의 또 다른 목적은, 디퍼렌셜 보정기술의 필요없이 코드 및 캐리어 위상 위치 결정을 하는 포지셔닝 시스템 및 방법을 제공하는 것이다.
본 발명의 추가적인 목적은, PUD를 시스템 시간축에 시간적으로 동기화시키는 것이며, 상기 시스템 시간축은 반드시 절대 정확도를 가질 필요는 없다.
본 발명의 추가적인 목적은, 지리적으로 분산된 PUD를 통해서 레퍼런스 시간축을 전파하는 것이다.
본 발명의 추가적인 목적은, 일단 정수 사이클 모호성이 해결되면, 단일점 캐리어 위상 위치 결정 솔루션이 디퍼렌셜 보정없이 결정될 수 있도록, 로빙(roving) 위치 수신기에 시간적으로 동기하는 캐리어 위상 의사거리를 제공하는 것이다.
본 발명의 추가적인 목적은, 정밀한 네트워크 시간전송 정보를 로빙 위치 수신기에 제공하는 것이다.
발명의 요약
본 발명은 로빙 위치 수신기로 하여금 포지셔닝 시스템에서 자신의 위치를 결정할 수 있도록 한다. 본 발명에 의한 포지셔닝 시스템은 기준 전송기의 시간축에 따라 기준 포지셔닝 신호를 생성하여 전송하는 하나 이상의 기준 전송기를 포함한다. 포지셔닝 시스템은 추가로 하나 이상의 포지셔닝 유닛 장치를 포함한다. 포지셔닝-유닛 장치 각각은 상기 기준 전송기 또는 상기 포지셔닝-유닛 장치의 어느 하나 또는 둘 다에 의해 전송된 기준 포지셔닝 신호를 수신하여 해석할 수 있는 특화된 트랜시버이다. 포지셔닝 유닛 장치는 고유 포지셔닝 신호를 생성하여 전송한다. 포지셔닝 유닛 장치는 그 다음에 자신의 고유 포지셔닝 신호를 수신하여 해석한다. 이 단계에서, 포지셔닝 유닛 장치는 수신된 기준 포지셔닝 신호와 수신된 고유 포지셔닝 신호를 비교하여 기준 전송기와 그 자체 사이의 전송 차이를 추론한다. 포지셔닝 유닛 장치는 포지셔닝 유닛 장치가 기준 포지셔닝 신호에 연대순으로 동기화될 때까지 기준 전송기와 그 자체 사이에 전달 지연과 전송 차이에 따라 고유 포지셔닝 신호의 생성 및 전송을 조정한다. 이 단계에서, 로빙 포지셔닝 수신기는 연대순으로 동기화된 고유 포지셔닝 신호 또는 고유 포지셔닝 신호와 기준 포지셔닝 신호 양자를 수신할 수 있다. 그 후, 로빙 포지셔닝 수신기는 차동 보정의 필요없이 자신의 위치를 계산할 수 있다.
본 발명의 바람직한 실시예에서, 기준 전송기는 시간-비간섭성(time-incoherence)을 나타내는 복수의 다수-주파수 포지셔닝 신호를 생성하여 전송하도록 구성된다. 포지셔닝-유닛 장치 각각은 복수의 다수-주파수 포지셔닝 신호를 생성하여 전송한다. 또한, 각 포지셔닝 유닛 장치는 상기 기준 전송기로부터 또는 다른 포지셔닝-유닛 장치를 포함하여 상기 포지셔닝-유닛 장치로부터 또는 둘 다로부터 상기 복수의 다수-주파수 포지셔닝 신호를 수신하도록 구성된다. 이 단계에서, 각 포지셔닝 유닛 장치는 상기 기준 전송기로부터 또는 상기 다른 포지셔닝-유닛 장치로부터 또는 둘 다로부터의 각각의 다수-주파수 포지셔닝 신호를 상기 포지셔닝-유닛 장치로부터의 각각의 다수-주파수 포지셔닝 신호에 독립적으로 연대순으로 동기화시키도록 구성된다. 그리하여 시간-비간섭성이 모든 다수-주파수 포지셔닝 신호 사이에 공통이 된다. 본 발명의 이 실시예에서, 로빙 위치 수신기는 상기 독립적으로 연대순으로 동기화된 다수-주파수 포지셔닝 신호를 수신하고, 상기 공통의 시간-비간섭성을 상기 수신기 클럭 바이어스로서 해석하여, 정확한 위치 솔루션이 수신기 클럭 바이어스를 포함하여 계산되도록 한다.
본 발명의 바람직한 또 다른 실시예에서, 상기 로빙 위치 수신기의 계산된 위치는 캐리어 싱글-포인트 위치-속도-시간(PVT) 솔루션에 의해 결정된다.
본 발명의 바람직한 또 다른 실시예에서, 상기 수신된 신호는 의사랜덤 코드 성분을 포함하며, 상기 로빙 위치 수신기는 각 수신된 신호 내의 상기 의사랜덤 코드 성분으로부터 도출된 의사랜덤 코드 싱글-포인트 위치 솔루션을 결정한다.
본 발명의 바람직한 또 다른 실시예에서, 상기 수신된 신호는 캐리어 성분을 포함하고 상기 로빙 위치 수신기는 각 수신된 신호 내의 상기 캐리어 성분으로부터 도출된 캐리어 싱글-포인트 위치 솔루션을 결정한다.
본 발명의 바람직한 또 다른 실시예에서, 상기 수신된 신호는 데이터 성분을 포함하고 상기 로빙 위치 수신기는 각각의 수신된 신호 내의 상기 데이터 성분으로부터 도출된 데이터 싱글-포인트 솔루션을 결정한다.
본 발명의 바람직한 또 다른 실시예에서, 상기 로빙 위치 수신기의 계산된 위치는 위치-속도-시간(PVT) 솔루션을 계산함으로써 상기 하나 이상의 기준 전송기의 시간축을 결정한다.
본 발명의 바람직한 또 다른 실시예에서, 상기 로빙 위치 수신기의 계산된 위치는 캐리어 싱글-포인트 포지셔닝 솔루션을 계산함으로써 상기 하나 이상의 기준 전송기의 시간축을 결정한다.
본 발명의 바람직한 또 다른 실시예에서, 상기 수신된 신호는 초기에 모호한 개수의 캐리어 사이클 성분과 분주기(fractional cycle) 성분으로 이루어진 캐리어 성분을 포함한다.
본 발명의 바람직한 또 다른 실시예에서, 상기 로빙 위치 수신기의 계산된 위치는, 상기 캐리어 싱글-포인트 위치 솔루션이 차동 보정에 대한 필요없이 결정될 수 있도록,
a) 분해된(resolved) 정수 사이클 성분을 생성하기 위해 상기 초기에 모호한 개수의 캐리어 사이클 성분을 분해하는 단계;
b) 상기 분해된 정수 사이클 성분과 상기 분주기 성분을 가산하여 정밀한 캐 리어 위상 의사범위(pseudorange)를 생성하는 단계;
c) 각각의 수신된 신호 내의 상기 정밀한 캐리어 위상 의사범위로부터 캐리어 싱글-포인트 위치 솔루션을 결정하는 단계;
에 의해 결정된다.
본 발명의 대안적인 실시예에서, 기준 전송기는 포지셔닝-유닛 장치, 광역보강시스템 위성, 광역항법시스템 위성, 의사위성, 또는 시간 정보를 포함하는 다른 장치를 포함한다.
이것은 로빙 위치 수신기로 하여금 포지셔닝 유닛 장치에 대한 물리적인 연결의 필요없이, 원자 시간 표준 또는 GNSS 시간축을 요구하지 않고, 그리고 차동 보정의 필요없이 코드와 캐리어-기반 싱글 포인트 위치 결정을 계산할 수 있도록 한다.
본 발명에 의하면 로빙 위치 수신기가 자신의 위치를 결정할 수 있도록 하는 포지셔닝 시스템 및 방법이 제공된다.
개관(overview)
포지셔닝-유닛 장치는 전용 트랜시버이며, 이것은 알려진 위치에 위치되어 적어도 하나의 기준 전송기로부터 적어도 하나의 기준 포지셔닝 신호를 수신한다. 바람직하게는, 기준 전송기는 다른 포지셔닝-유닛 장치이거나 또는 WAAS 위성이다. 수신된 기준 포지셔닝 신호에 응답하여, 포지셔닝-유닛 장치는 내부적으로 발생된 포지셔닝 신호를 기준 전송기 시간축에 시간순으로 동기화하며, 자신의 고유 포지셔닝 신호를 시야에 있는 다른 모든 위치 수신기로 전송한다. 자치 위치 네트워크의 형성을 위한 최소한의 필요사항은 하나의 기준 전송기에 시간순으로 동기화된 적어도 2개의 포지셔닝-유닛 장치이다. 이러한 자치 네트워크 내에 있는 모든 전송된 신호를 시야에 두는 로빙 위치 수신기는 디퍼렌셜 보정의 필요없이 자치 코드 및 캐리어 단일점 위치 솔루션을 결정할 수 있다. 추가로, 기준 전송기 발진기는 종래의 기술을 이용하는 시스템과는 달리 원자 시간 표준기의 내재적 안정성을 필요로 하지 않으며, 그리하여 비싸지 않은 수정 발진기가 전체 위치 네트워크를 위한 기준 시간축으로서 이용될 수 있게 한다.
그리하여, 아래에서 설명되는 바와 같이, 포지셔닝-유닛 장치는 시간순으로 동기화된 포지셔닝 신호를 로빙 위치 수신기에 분배하는 은유적 "채널"로서 기능할 수 있다. 이것은 로빙 위치 수신기가 포지셔닝-유닛 장치들간의 물리적 연결에 대한 필요 없이, 원자 시간 표준기나 GNSS 시간축을 필요로 하지 않고서, 그리고 디퍼렌셜 보정을 필요로 하지 않고서 코드 및 캐리어-기반 단일점 위치 결정을 둘다 계산할 수 있게 한다.
시스템 및 방법
도 1은 코드 및 캐리어-기반 단일점 위치 계산을 이용하여 정밀한 위치 결정을 생성하는 포지셔닝 시스템에 대한 하나의 구성이다. 복수의 포지셔닝-유닛 장 치(101-1 및 101-2)는 기준 좌표 시스템에 대해서 알려진 위치에 위치되며, 적어도 하나의 기준 전송기(103)에 의해 브로드캐스트 되는 적어도 하나의 기준 포지셔닝 신호(102)를 각각 수신하는데, 상기 적어도 하나의 기준 전송기는 기준 좌표 시스템에 대해서 알려진 위치에 또한 위치된다. 수신된 기준 포지셔닝 신호(102)에 응답하여, 포지셔닝-유닛 장치(101-1 및 101-2)는 하나 이상의 고유 포지셔닝 신호(104-1 및 104-2)를 전송하며, 이것은 기준 전송기(103)에 시간순으로 동기화된다. 장치들(101-1, 101-2, 103)의 네트워크내에 위치한 로빙 위치 수신기(105)는 기준 전송기(103)로부터 기준 포지셔닝 신호(102)를 수신하고, 포지셔닝-유닛 장치(101-1 및 101-2)로부터 고유 포지셔닝 신호(104-1 및 104-2)를 수신하며, 시간순으로 동기화된 포지셔닝 신호의 네트워크로부터 코드 및 캐리어-기반 단일점 위치 결정을 자치적으로 계산한다.
타임-
로크
(
Tiem
-Lock)
타임-로크 된 포지셔닝-유닛 장치는 공통 시간순의 시간축에 동기되는데, 공통 시간순의 시간축은 임의의 값일 수 있으며 임의의 분산을 갖는다. 그러므로 수정 발진기와 같은 간단하면서도 비싸지 않은 임의의 클럭 소스가 기준 전송기에서 기준 클럭으로 충분할 것이다. 바람직한 실시예에서, 온도 보상된 수정 발진기(TCXO)나 그 보다 더 좋은 것이 사용된다. 포지셔닝-유닛 장치는 먼저 기준 전송기 포지셔닝 신호를 획득하고, 기준 전송기의 알려진 좌표와 포지셔닝-유닛 장치의 알려진 좌표로부터 소위 비행시간 오프셋(time-of-flight offset)을 계산한다. 비 행시간 오프셋은 기준 전송기로부터 포지셔닝-유닛 장치로 이동하는 동안 기준 포지셔닝 신호에 의해 경험된 전파 시간 지연을 고려한다. 자유 공간에서, 전자기파는 매 3 나노초당 약 1 미터를 나아간다. 다음으로, 포지셔닝-유닛 장치는 비행시간 오프셋을 내부적으로 생성된 포지셔닝 신호에 인가하며, 이 포지셔닝 신호를 착신 기준 포지셔닝 신호에 정렬시키고, 그리하여 내부적으로 생성된 포지셔닝 신호를 기준 전송기와 시간순으로 정렬시킨다. 구체적으로, 타임-로크는 포지셔닝-유닛 장치들의 내부적으로 생성된 포지셔닝 신호가 착신 기준 포지셔닝 신호와 주파수 통일성을 갖고, 기준 전송기 시간축과 시간순 통일성을 가질 때 성취된다.
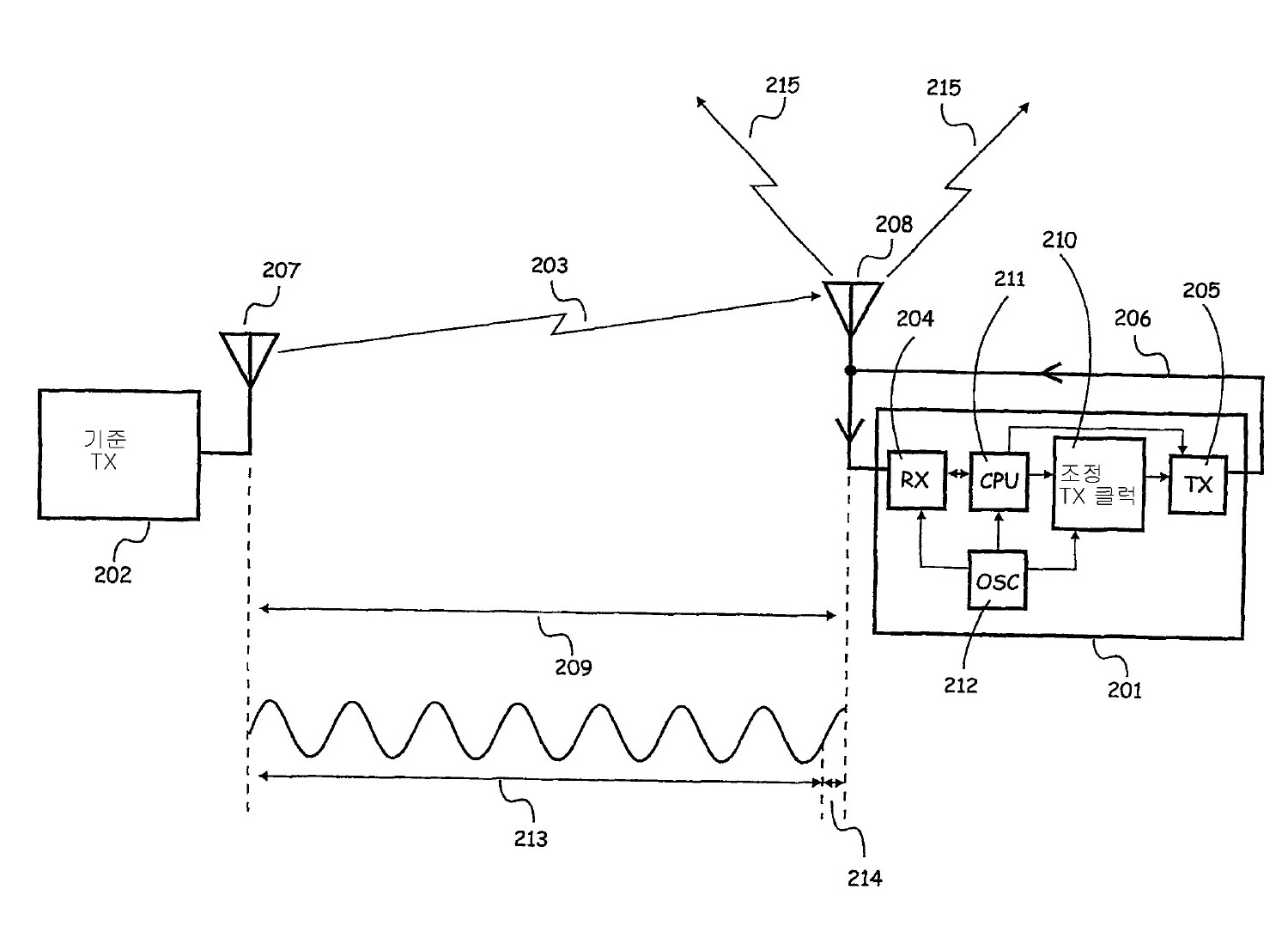
기준 포지셔닝 신호는 기준 전송기로부터 라디오 주파수(RF) 캐리어를 통해 전송된다. 기준 포지셔닝 신호는 임의의 유효한 시간 소스로부터 생성될 수 있으며, 이 소스는 포지셔닝-유닛 장치, 광역보강시스템(WAAS) 위성, 위성항법 시스템(GNSS) 위성, 의사위성(Pseudolites), 또는 유효한 소스들의 임의의 조합을 포함할 수 있다. 도 2를 참조하면, 기준 전송기(202)로부터 알려진 거리에 위치한 포지셔닝-유닛 장치(201)는 기준 전송기(202)에 의해 전송된 기준 포지셔닝 신호(203)를 수신한다. 기준 포지셔닝 신호(203)는 캐리어 성분, 의사난수(pseudo-random) 코드 성분, 및 데이터 성분을 갖는다. 포지셔닝-유닛 장치(201)는 위치 수신기(204)와 같은 장소에 배치된 전송기(205)를 통합한다. 위치 수신기(204)는 시야에 있는 모든 기준 포지셔닝 신호(203)로부터 포지셔닝 신호를 수신할 수 있으며, 같은 장소에 배치된 전송기(205)로부터 포지셔닝 신호를 또한 수신할 수 있다. 수신된 기준 포지셔닝 신호(203)에 응답하여, 포지셔닝-유닛 장치(201)은 자신의 전송기(205)로부터 소위 슬레이브 포지셔닝 신호(206)를 전송하는데, 이것은 포지셔닝-유닛 장치 위치 수신기(204)에 의해 수신된다. 슬레이브 포지셔닝 신호(206)는 캐리어 성분, 의사난수 코드 성분, 및 데이터 성분을 갖는다. 포지셔닝-유닛 장치 위치 수신기(204)는 기준 전송기(202)로부터 기준 포지셔닝 신호(203)를, 같은 장소에 배치된 전송기(205)로부터 슬레이브 포지셔닝 신호(206)를 수신하고 동시에 샘플링한다. 이후 전송 시간차가 수신된 기준 포지셔닝 신호(203)와 수신된 슬레이브 포지셔닝 신호(206) 사이에서 계산된다. 전송 시간차는 바람직한 실시예에서 이용되는 바와 같이, 다음에 의해서 결정된다:
(a) 기준 포지셔닝 신호(203)와 슬레이브 포지셔닝 신호(206)의 캐리어 성분으로부터 결정된 통합 캐리어 위상(ICP) 측정치들을 비교하여 캐리어 주파수차를 결정함.
*(b) 기준 포지셔닝 신호(203)와 슬레이브 포지셔닝 신호(206)로부터 내비게이션 데이터 성분을 복조하고 비교하여 대략의 전송 시간차를 결정함.
(c) 기준 포지셔닝 신호(203)와 슬레이브 포지셔닝 신호(206)의 의사난수 코드 성분으로부터 결정된 의사거리 측정치들을 비교하여 코드 의사거리 차이를 결정함.
(d) 기준 포지셔닝 신호(203)와 슬레이브 포지셔닝 신호(206)의 캐리어 성분으로부터 결정된 순간 캐리어 위상 측정치들을 비교하여 캐리어 위상차를 결정함.
슬레이브 포지셔닝 신호(206)의 기준 전송기(202) 시간축에 대한 정밀한 시 간 동기를 위해서는, 기준 전송기 안테나(207)와 포지셔닝-유닛 장치 위치 수신기 안테나(208) 사이의 신호 전파 지연이 설명되어야만 한다. 기준 전송기 안테나(207)에서 포지셔닝-유닛 장치 위치 수신기 안테나(208)까지의 알려진 미터 단위의 기하학적인 거리는 다음 공식에 의해 신호 비행시간으로 변환될 수 있다: 비행시간=거리/광속. 포지셔닝-유닛 장치(201)는 조종된 전송기 클럭(210)을 통합하며, 이것은 포지셔닝-유닛 장치 CPU(211)에 의해 주파수가 조정될 수 있다. 조종된 전송기 클럭(210)에 대한 보정은 포지셔닝-유닛 장치 수신기(204)에 의해 측정된, 기준 포지셔닝 신호(203)와 슬레이브 포지셔닝 신호(206)간의 시간차 및 기준 포지셔닝 신호 비행시간(209)에 의한 오프셋으로부터 포지셔닝-유닛 장치 CPU(211)에 의해 결정된다. 이것은 슬레이브 포지셔닝 신호(206)를 기준 전송기(202) 시간축과의 시간순으로 동기되게 만든다.
수신된 기준 포지셔닝 신호(203)를 슬레이브 포지셔닝 신호(206)와 구별짓는 처리는 포지셔닝-유닛 장치 위치 수신기 클럭 항을 제거하며, 그리하여 포지셔닝-유닛 장치(201)가 로컬 포지셔닝-유닛 장치 발진기(212)에 의해 야기된 임의의 클럭 바이어스 없이 기준 전송기(202)를 따르도록 만든다. 또한, 동일한 위치 수신기(204)의 2개의 채널을 구별짓는 것은 위치 수신기 전자제품들에 의해 야기된 임의의 라인 바이어스나 그룹 지연을 제거한다.
포지셔닝
-유닛 장치의 제어 상태
바람직한 실시예에서, 다음의 제어 상태를 이용하는 기준 전송기에 대한 포 지셔닝-유닛 장치 타임-로크:
상태 0: 리셋
모든 하드웨어를 리셋
상태 1: 기준을 획득
포지셔닝-유닛 장치 CPU(211)는 포지셔닝-유닛 장치 위치 수신기(204)에 의해 기준 포지셔닝 신호(203)에 대한 탐색을 개시한다.
상태 2: 기준에 대한 로크
포지셔닝-유닛 장치 위치 수신기(204)는 기준 포지셔닝 신호(203)와 기준 전송기(202) 위치를 획득하고, 시간은 포지셔닝-유닛 장치 CPU(211)에 의해 내비게이션 데이터로부터 복조된다.
상태 3: 슬레이브를 동기화
포지셔닝-유닛 장치 CPU(211)는 기준 포지셔닝 신호 내비게이션 데이터 성분과의 대략의 시간 정렬을 감안하기 위해서 대기함.
상태 4: 슬레이브를 초기화
포지셔닝-유닛 장치 CPU(211)는 특별한 이 포지셔닝-유닛 장치(201)에 대한 적절하고 고유한 PRN 코드 시퀀스를 결정하며, 이 PRN 코드 시퀀스를 포지셔닝-유닛 장치 전송기(205)에 할당한다. 기준 포지셔닝 신호(203)에 대한 현재 주파수 오프셋(포지셔닝-유닛 장치 발진기(212)에 대해 상대적인)은 포지셔닝-유닛 장치 CPU(211)에 의해서 포지셔닝-유닛 장치의 조종된 전송기 클럭(210)에 또한 할당된다. 이것은 기준 포지셔닝 신호(203)의 주파수와 대략 동일한 주파수로 포지셔닝-유닛 장치 전송기(205)를 초기화하는 기능을 한다. 포지셔닝-유닛 장치 CPU(211)는 결정된 PRN 시퀀스를 포지셔닝-유닛 장치 위치 수신기(204)에 있는 자유 수신기 채널에 또한 할당한다. 수신기 채널은 포지셔닝-유닛 장치 위치 수신기(204)에 의한 슬레이브 포지셔닝 신호(206)의 획득을 돕기 위해서, 포지셔닝-유닛 장치 전송기(205)와 동일한 주파수 오프셋 및 의사난수 코드 위상 값으로 초기화된다. 포지셔닝-유닛 장치는 이후 슬레이브 포지셔닝 신호(206)의 전송을 개시한다.
상태 5: 슬레이브를 획득
포지셔닝-유닛 장치 위치 수신기(204)는 슬레이브 포지셔닝 신호(206)에 대한 탐색을 개시한다.
상태 6: 슬레이브에 대한 로크
포지셔닝-유닛 장치 위치 수신기(204)는 슬레이브 포지셔닝 신호(206)를 획득하며, 대략의 슬레이브 시간이 자신의 내비게이션 데이터 성분으고부터 복조된다.
*상태 7: 기준/슬레이브 주파수 로크
기준 포지셔닝 신호(203)와 슬레이브 포지셔닝 신호(206)에 대한 동시적인 통합 캐리어 위상(ICP) 측정치들은 초기화되고(0으로 됨) 포지셔닝-유닛 장치 위치 수신기(204)에 의해 디퍼렌셜 된다. 이 디퍼렌셜 된 값은 기준 포지셔닝 신호(203)와 슬레이브 포지셔닝 신호(206)간의 주파수 및 위상 차이를 나타낸다. 포지셔닝-유닛 장치 CPU(211) 내의 제어 루프는 계속적으로 포지셔닝-유닛 장치의 조종된 전송기 클럭(210)에 보정을 가하여 기준 포지셔닝 신호(203)와 슬레이브 포지셔닝 신호(206)간의 영(zero) ICP 차이를 유지하며, 그리하여 주파수 로크를 유지한다.
또는 포지셔닝-유닛 장치 위치 수신기(204)에 의해 측정된 바대로의, 수신된 기준 포지셔닝 신호 주파수 오프셋 값은 포지셔닝-유닛 장치의 조종된 전송기 클럭(210)에 직접 인가되어 소위 "주파수 트래킹 시스템"(FTS)을 생성할 수 있다. 조종된 전송기 클럭(210)은 착신 기준 포지셔닝 신호(203)의 주파수 오프셋을 단순히 에뮬레이트하며, 그리하여 주파수 로크를 유지한다. 이 방법은 포지셔닝-유닛 장치 발진기(212)가 위치 수신기(204)와 전송기(205) 사이에서 공통이 될 것을 요구한다.
상태 8: 기준/슬레이브 코드-로크
일단 상태 7의 기준/슬레이브 주파수 로크가 성취되면, 기준 포지셔닝 신 호(203)와 슬레이브 포지셔닝 신호(206)간의 시간차는 정확하게 측정될 수 있고, 임의의 시간 바이어스는 제거될 수 있다. 기준/슬레이브 코드-로크는 포지셔닝-유닛 장치의 조종된 전송기 클럭(210)이 필요한 시간만큼 슬루(slew)되어 기준 및 슬레이브 포지셔닝 신호가 PRN 코드 정렬이 되게 할 때 성취된다. 비행시간 값(209)은 측정된 기준-슬레이브 시간차를 상쇄하여 기준 신호 전파 지연의 효과를 제거하기 위해 사용되며, 계산된 시간차는 이후 포지셔닝-유닛 장치의 조종된 전송기 클럭(210)에 대한 클럭 보정으로 인가된다. 클럭 보정은 주파수 트래킹 시스템(FTS)을 채용하고 소정의 시간 주기를 위해 추가적인 주파수 오프셋을 조종된 전송기 클럭(210)에 인가함으로써 성취된다. 이 추가적인 주파수 오프셋은 슬레이브 포지셔닝 신호(206)로 하여금 그것이 기준 전송기(202) 시간축과 시간 통일이 될 때까지 시간 상에서 슬루되도록 한다. 일단 이 시간 슬루가 완료되면, 제어 루프는 재-종사(re-engaged)된다. 또는 코드-로크는 주파수 로크를 유지하면서 포지셔닝-유닛 장치 전송기(205) PRN 코드 생성기를 필요한 코드 위상 양(칩) 만큼 슬루함으로써 성취될 수 있다.
코드-로크는 PRN 코드 정확도에 기초하는데, 이것은 본래부터 노이즈가 타 있다. 바람직한 실시예에서, 정적 포지셔닝-유닛 장치는 PRN 코드 노이즈를 서브 캐리어 사이클 수준으로 필터링한다.
상태 9: 기준/슬레이브 위상 로크
일단 상태 7 기준/슬레이브 주파수 로크와 상태 8 기준/슬레이브 코드-로크 가 성취되면, 보정되어야만 하는 2개의 시간 에러는 여전히 남는다: (1) 180도 위상 모호성 및 (2) 비행시간 위상 오프셋
(1) 180도 위상 모호성 보정: 데이터는 "코스타스(Costas) 루프"로 잘 알려진 종래 기술의 특수한 위상-로크-루프를 이용하여 PRN 코드 포지셔닝 신호로부터 복조된다. 코스타스 루프 기술은 본래부터 180도 위상 모호성을 통합하고 있으며, 그러므로 하프 사이클 모호성으로 포지셔닝 신호를 획득하고 트래킹할 수 있다. 이러한 하프 사이클 모호성은 2.4GHz에서 약 200 피코초 시간 오프셋을 나타낸다. 코스타스 루프 모호성은 위치 네트워크 내에 있는 전송기들에 의해 내비게이션 데이터 성분에서 전송된, 일반적으로 프리앰블이라 불리는, 소정의 데이터 비트 시퀀스에 대한 참조에 의해 해결될 수 있다. 코스타스 루프 모호성이 해결될 때, 임의의 고정된 위상차는 주파수-로크된 기준 및 슬레이브 포지셔닝 신호의 위치 수신기 위상 레지스터들 간에서 명백해진다. 이러한 임의의 위상 오프셋은 슬레이브 포지셔닝 신호의 임의의 위상 때문이며, 다음의 단계 (2)에서 조정된다.
(2) 비행시간 위상 오프셋 보정: 부분(fractional)-사이클 비행시간 위상 오프셋은 기준 전송기 안테나(207)와 포지셔닝-유닛 장치 안테나(208)간의 기준 포지셔닝 신호 전파 지연 때문에 존재한다. 기준 전송기와 포지셔닝-유닛 장치간의 기하학적 거리(209)는 전체 캐리어 사이클(정수 성분)(213)의 갯수 더하기 부분 캐리어 사이클(부분 성분)(214)로서 표현될 수 있다. 비행시간 위상 오프셋은 기준 전송기 안테나(207)와 포지셔닝-유닛 장치 안테나(208)간의 알려진 기하학적 거리로부터 계산된 부분 사이클의 양(214)이다. 정수 성분(213)은 전술된 상태 8 기준/ 슬레이브 코드-로크 제어 상태에서 보정된다. 그러나 부분 성분(214)은 상태 8의 기준/슬레이브 코드-로크 상태에서 보정되기에는 너무 미세하며, 그리하여 캐리어 위상 조정으로서 보정되어야만 한다. 주파스 트래킹 시스템(FTS)이 이용되며 포지셔닝-유닛 장치의 조종된 전송기 클럭(210)은 필요한 부분-사이클 양(위의 단계 (1)에서 결정된 현재 측정된 임의의 위상 값으로부터) 만큼 시간 슬루되어 새로이 결정된 비행시간 위상 값이 된다. 타임-로크-루프(TLL)는 이후 재사용된다. 포지셔닝-유닛 장치 안테나(208)로부터 방출된 포지셔닝-유닛 장치 캐리어 위상 슬레이브 포지셔닝 신호(206)는 이제 기준 전송기 안테나(207)로부터 방출된 기준 전송기(202) 캐리어 위상 포지셔닝 신호와 시간순으로 동기화된다.
상태 10: 기준/슬레이브 올 로크
전술한 모든 상태가 일단 성취되면, CPU(211)는 타임-로크를 선언하고 포지셔닝-유닛 장치(201)는 이제 완전히 동기화된 고유 포지셔닝 신호(215)의 전송을 시작한다. 포지셔닝-유닛 장치의 고유 포지셔닝 신호(215)는 이제 피코초의 정확도로서 기준 전송기(202) 시간축에 시간순으로 동기화되며, 이는 종래 기술의 능력을 실질적으로 넘어서는 능력이다.
고유
포지셔닝
신호
바람직한 실시예에서, 각각의 포지셔닝-유닛 장치 전송기는 고유 포지셔닝 신호를 전송하는데, 이것은 캐리어 성분, 의사난수 코드 성분 및 내비게이션 데이 터 성분으로 구성된다. 캐리어 성분은 비록 본 발명이 다른 주파수 대역에 동등하게 적용 가능함에도 불구하고, 바람직하게는 2.4GHz ISM 대역에서 전송된 정현 라디오 주파수파이다. 의사난수 번호(PRN) 코드 성분은 캐리어 성분상에 변조되며, 동일 캐리어 주파수에서 다른 장치들에 의해 전송된 다른 의사난수 코드 시퀀스들 사이에서 구별될 수 있는 고유 코드 시퀀스로 구성된다. 이 기술은 코드 분할 다중 액세스(CDMA)로 알려져 있으며, 잘 알려진 종래 기술이다. 내비게이션 데이터 성분은 의사난수 코드 성분 상에 변조된 소유 정보이며, 통신 링크를 제공하여 내비게이션 정보를 포지셔닝-유닛 장치와 로빙 위치 수신기로 전달한다. 내비게이션 정보는 네트워크 시간, 포지셔닝-유닛 장치 위치, 비유적인 "기준 클럭 혈통" 정보, 및 다른 원하는 네트워크 데이터를 포함할 수 있다.
타임-
로크
구성
타임-로크는 많은 상이한 구성으로 구현될 수 있다. 이들 구성은 다음을 포함한다:
1. 단일 포지셔닝-유닛 장치에 브로드캐스트 하는 단일 기준 전송기
*2. 복수의 포지셔닝-유닛 장치에 브로드캐스트 하는 단일 기준 전송기
3. 중계 포지셔닝-유닛 장치를 통해 브로드캐스트 하는 하나 이상의 기준 전송기
4. 하나 이상의 포지셔닝-유닛 장치로 브로드캐스트 하는 복수의 기준 전송 기
5. 포인트 위치 시간 동기화
단일
포지셔닝
-유닛 장치로
브로드캐스트
하는 단일 기준 전송기
단일 기준 전송기가 포지셔닝-유닛 장치에 기준 포지셔닝 신호를 브로드캐스트하기 위해 사용될 수 있다. 도 2는 알려진 위치에 위치한 포지셔닝-유닛 장치(201)와 역시 알려진 위치에 위치해 있는 기준 전송기(202)를 도시하고 있다. 포지셔닝-유닛 장치(201)는 기준 전송기(202)에 의해 전송된 기준 포지셔닝 신호(203)와 포지셔닝-유닛 장치(205)에 의해 전송된 슬레이브 포지셔닝 신호(206)를 수신한다. 수신된 기준 포지셔닝 신호(203)에 응답하여, 포지셔닝-유닛 장치(201)는 기준 포지셔닝 신호 전파 지연(209)을 결정하고, 적절한 전송기 클럭 보정을 인가하여, 내부적으로 생성된 슬레이브 포지셔닝 신호(206)의 캐리어 성분, 고유 PRN 코드 성분, 및 데이터 성분을, 기준 전송기 포지셔닝 신호(203)의 캐리어 성분, PRN 코드 성분, 및 데이터 성분에 시간순으로 동기화시킨다. 이후 포지셔닝-유닛 장치는 고유 포지셔닝 신호(215)를 전송하는데, 이것은 기준 전송기(202) 시간축에 시간순으로 동기화되어 있다.
2개의 포지셔닝 신호는 로빙 위치 수신기의 위치 솔루션을 결정하는데는 충분하지 않다. 그러나, 만약 기준 전송기가 WAAS 위성이면, 타임-로크 된 포지셔닝-유닛 장치 신호는 피코초 수준까지 GPS 시간과 동기화 될 것이며, 그리하여 종래의 코드-기반 GPS 솔루션에 대해 추가적인 정밀한 범위 소스로서 위치 수신기에 의 해 사용될 수 있다.
복수의
포지셔닝
-유닛 장치로
브로드캐스트
하는 단일 기준 전송기
단일 기준 전송기는 복수의 포지셔닝-유닛 장치가 기준 전송기를 명확히 시야에 두고 있을 때 포지셔닝-유닛 장치들의 네트워크를 형성하기 위해 사용될 수 있다.
도 3은 알려진 위치에 위치한 복수의 포지셔닝-유닛 장치(301-1 및 301-2)와 역시 알려진 위치에 위치한 기준 전송기(302)를 도시하고 있다. 포지셔닝-유닛 장치(301-1 및 301-2)는 기준 전송기(302)에 의해 전송된 기준 포지셔닝 신호(303)를 수신한다. 수신된 기준 포지셔닝 신호(303)에 응답하여, 각 포지셔닝-유닛 장치(301-1 및 301-2)는 기준 전송기(302)로부터의 각각의 신호 전파 지연(304-1 및 304-2)을 결정하고, 적절한 전송기 클럭 보정을 인가하여, 내부적으로 생성된 포지셔닝 신호의 캐리어 성분, 고유 PRN 코드 성분 및 데이터 성분을, 기준 전송기 포지셔닝 신호(303)의 캐리어 성분, PRN 코드 성분 및 데이터 성분에 시간순으로 동기화시킨다. 이후 각 포지셔닝-유닛 장치는 고유 포지셔닝 신호(305-1 및 305-2)를 전송하는데, 이것은 기준 전송기(302) 시간축에 시간순으로 동기화되어 있다.
중계
포지셔닝
-유닛 장치를 통해
브로드캐스트
하는 하나 이상의 기준전송기
하나 이상의 시간-동기화된 기준 전송기는 모든 포지셔닝-유닛 장치 장치가 기준 전송기를 확실한 시야에 두고 있지 않을 때 포지셔닝-유닛 장치의 네트워크를 형성하기 위해 사용될 수 있다. 이 구성에서, 타이밍 신호는 중계 포지셔닝-유닛 장치들을 통해 캐스케이딩(cascade)된다. 중계 포지셔닝-유닛 장치가 타임-로크를 선언할 때, 후속 포지셔닝-유닛 장치들은 그들의 기준 포지셔닝 신호로서 이 중계 포지셔닝-유닛 장치를 이용할 수 있다.
도 4는 알려진 위치에 위치한 기준 전송기(401)와 역시 알려진 위치에 위치한 제 1 포지셔닝-유닛 장치(402)를 도시하고 있다. 제 1 포지셔닝-유닛 장치(402)는 기준 전송기(401)에 의해 전송된 포지셔닝 신호(403)를 수신한다. 수신된 기준 포지셔닝 신호(403)에 응답하여, 제 1 포지셔닝-유닛 장치(402)는 기준 전송기(401)로부터의 신호 전파 지연(404)을 결정하고, 적절한 클럭 보정을 인가하여, 내부적으로 생성된 포지셔닝 신호의 캐리어 성분, 고유 PRN 코드 성분 및 데이터 성분을, 기준 전송기 포지셔닝 신호(403)의 캐리어 성분, PRN 코드 성분 및 데이터 성분에 시간순으로 동기화시킨다. 이후 제 1 포지셔닝-유닛 장치(402)는 고유 포지셔닝 신호(405)를 전송하는데, 이것은 기준 전송기(401) 시간축에 시간순으로 동기화되어 있다.
복수의
포지셔닝
-유닛 장치로
브로드캐스트
하는 단일 기준 전송기
복수의 포지셔닝-유닛 장치가 기준 전송기로부터 명확하게 보여질 때, 단일 기준 전송기는 포지셔닝-유닛 장치의 네트워크를 형성하는데 사용될 수 있다.
도 3은 알려진 위치(301-1,301-2)에 놓여진 복수의 포지셔닝-유닛 장치와 역시 알려진 위치에 놓여진 기준 전송기(302)를 도시한다. 포지셔닝-유닛 장치(301- 1,301-2)는 기준 전송기(302)에 의해 전송된 기준 포지셔닝 신호(303)를 수신한다. 수신된 기준 포지셔닝 신호(303)에 응답하여 각 포지셔닝-유닛 장치(301-1,301-2)는 기준 전송기(302)로부터 각각의 신호 전파 지연(304-1, 304-2)을 판단하고, 적당한 전송 클럭 보정을 가하여 캐리어 부분, 고유의 PRN 코드 부분, 및 이들에서 내부적으로 생성된 포지셔닝 신호의 데이터 부분을 캐리어 부분, PRN 코드 부분, 및 기준 전송기 포지셔닝 신호(303)의 데이터 부분에 시간적으로 동기화시킨다. 각각의 포지셔닝-유닛 장치는 기준 전송기(302) 시간축에 시간적으로 동기화된 단일 포지셔닝 신호(305-1,305-2)를 순차적으로 전송한다.
중계 포지셔닝 -유닛 장치를 통하여 브로드캐스트하는 하나 이상의 기준 전송기
하나 이상의 시간적으로 동기화된 기준 전송기는, 모든 포지셔닝-유닛 장치가 기준 전송기에서 명확하게 보여짐이 없이 포지셔닝-유닛 장치의 네트워크를 형성하는데 사용될 수 있다. 이 구성에서 타이밍 신호는 중계 포지셔닝-유닛 장치를 통해 캐스케이드된다. 중계 포지셔닝-유닛 장치가 타임로크(time-lock)을 선언하면, 차후의 포지셔닝-유닛 장치는 이 중계 포지셔닝-유닛 장치를 그것의 기준 포지셔닝 신호로 이용할 수 있다 .
도 4는 알려진 위치에 놓여진 기준 전송기(401)와, 역시 알려진 위치에 놓여진 제 1 포지셔닝-유닛 장치(402)를 도시한다. 제 1 포지셔닝-유닛 장치(402)는 기준 전송기(401)에 의해 전송된 포지셔닝 신호(403)를 수신한다. 수신된 기준 포 지셔닝 신호(403)에 기초하여 제 1 포지셔닝-유닛 장치(402)는 기준 전송기(401)로부터 신호 전파 지연(404)을 판단하고, 적당한 전송 클럭 보정을 가하여 캐리어 부분, 유일한 PRN 코드 부분, 및 이들에서 내부적으로 생성된 포지셔닝 신호의 데이터 부분을 캐리어 부분, PRN 코드 부분, 및 기준 전송기 포지셔닝 신호(403)의 데이터 부분에 시간순으로 동기화시킨다. 제 1 포지셔닝-유닛 장치(402)는 기준 전송기(401) 시간축에 시간순으로 동기화된 단일 포지셔닝 신호(405)를 순차적으로 전송한다.
알려진 위치에 놓여진, 그러나 빌딩(409)에 의해 야기된 신호 차단에 기인한 기준 포지셔닝 신호(410)에서 보이지 않는 제 2 포지셔닝-유닛 장치(406)는 제 1 포지셔닝-유닛 장치(402)로부터 포지셔닝 신호(405)를 순차적으로 수신한다. 수신된 포지셔닝 신호(405)에 기초하여 제 2 포지셔닝-유닛 장치(406)는 제 1 포지셔닝-유닛 장치(402)로부터 신호 전파 지연(407)을 판단하고, 적당한 전송 클럭 보정을 가하여 캐리어 부분, 유일한 PRN 코드 부분, 및 이들에서 내부적으로 생성된 포지셔닝 신호의 데이터 부분을 캐리어 부분, PRN 코드 부분, 및 제 1 포지셔닝 신호(405)의 데이터 부분에 시간순으로 동기화시킨다. 제 2 포지셔닝-유닛 장치(406)는 캐리어 부분, PRN 코드 부분, 및 데이터 부분에 통합하는 단일한 포지셔닝 신호(408)를 순차적으로 전송한다. 이 단일 포지셔닝 신호(408)는 제 1 포지셔닝-유닛 장치(402) 시간축에 시간순으로 동기화되고, 또한 기준 전송기(401) 시간축에도 시간순으로 동기화된다.
하나 이상의
포지셔닝
-유닛 장치로
브로드캐스트하는
복수의 기준전송기
복수의 시간순으로 동기된 기준 전송기는 기준 포지셔닝 신호를 하나 이상의 포지셔닝-유닛 장치로 브로드캐스트 하는데 사용될 수 있다. 이 구성에서 멀티패스 및 대류권에서의 지연과 같은 어떤 기준 신호 에러 소스는 시간축 정확성을 개선하기 위해 기준 전송기 사이에서 평균화될 수 있다.
도 5는 알려진 위치에 놓여진 포지셔닝-유닛 장치(501)와, 역시 알려진 위치에 놓여진 공통의 시간축을 가지는 복수의 기준 전송기(502-1, 502-2)를 도시한다. 포지셔닝-유닛 장치(501)는 기준 전송기(502-1, 502-2)로 전송된 기준 포지셔닝 신호(503-1, 503-2)를 수신한다. 수신된 기준 포지셔닝 신호(503-1, 503-2)에 기초하여 포지셔닝-유닛 장치(501)는 각각의 기준 전송기(502-1, 502-2)로부터 신호 전파 지연(504-1, 504-2)을 판단하고, 적당한 전송 클럭 보정을 가하여 캐리어 부분, 유일한 PRN 코드 부분, 및 이들에서 내부적으로 생성된 포지셔닝 신호의 데이터 부분을 캐리어 부분, PRN 코드 부분, 및 두개의 기준 전송기 포지셔닝 신호(503-1, 503-2)들의 데이터 부분에 시간순으로 동기화시킨다. 포지셔닝-유닛 장치(501)는 단일 포지셔닝 신호(505)를 순차적으로 전송하고 기준 전송기(502-1, 502-2)의 시간축에 시간순으로 동기화된다.
포인트 포지션
타임로크
포지셔닝-유닛 장치가 기준 전송기와 알려진 포지셔닝-유닛 장치 사이의 지 리적인 거리(기준 포지셔닝 신호 전파 지연)없이 네트워크 시간축에 동기화하는 것이 역시 가능하다. 타임로크에 대한 이 실시예에서, 적어도 4개의 타임로크된 포지셔닝-유닛 장치가 도시되어야 한다. 포지셔닝-유닛 장치는 네트워크에 진입하기를 요구하면서, 단일점 위치를 계산하여 그 3차원상의 위치를 스스로 조사하고, 포지셔닝-유닛 장치 위치 수신기 클럭 오프셋과 통합한다. 포지셔닝-유닛 장치 위치 수신기 클럭 오프셋은 네트워크 타임(로컬 위치 수신기 클럭에 상대적인)을 정확히 제공하고, 포지셔닝-유닛 장치 슬레이브 전송기는 정확한 네트워크 시간축으로 사용될 수 있다. 선호되는 실시예에서, 포지셔닝-유닛 장치는 정확한 네트워크 타임을 피코세컨드(ps) 단위로 판단하기 위해 단일점 캐리어 솔루션을 사용하고 이는 실질적으로 종래 기술의 시스템의 성능을 넘어서는 것이다.
WAAS
기준
바람직한 실시예에서 기준 전송기는 광역보강시스템(WAAS) 위성이다. WAAS 위성은 정지 통신위성으로, GPS 수신기에 GPS 차이값 수정을 전송한다. WAAS 위성은 또한 단일 포지셔닝 신호를 1575.42MHz의 GPS L1 캐리어 주파수로 전송한다. 이 단일 포지셔닝 신호는 UTC를 위해 제공된 교정을 수반하여 GPS 시간에 정확히 동기화된다. 따라서 WAAS 위성은 이상적인 기준 전송기를 만들고 이것은 UTC의 세계 기준 시간축에 동기화된다.
바람직한 실시예에서 포지셔닝-유닛 장치 위치 수신기는 2.4GHz ISM 대역에서 다른 포지셔닝-유닛 장치로부터 포지셔닝 신호, L 대역 주파수의 WAAS 및 GNSS 위성으로부터의 포지셔닝 신호를 수신하는 수단을 통합한다. 포지셔닝-유닛 장치는 기준 전송기로써 WAAS 위성을 사용할 수 있고, 그것의 2.4GHz 슬레이브 포지셔닝 신호를 1575.42MHz WAAS 포지셔닝 신호로 타임로크한다. 이종의 캐리어 주파수 사이의 타임로크는 들어오는 WAAS와 포지셔닝-유닛 장치 캐리어들을 포지셔닝-유닛 장치 위치수신기의 공통 베이스밴드 주파수로 일관되게(coherently) 다운 컨버팅하여 초기화된다. 그후 타임로크는 앞서 기술된 방법과 함께 수행된다. 일관된 다운 컨버젼은 공통의 발진기로부터 구동되도록 포지셔닝-유닛 장치 위치 수신기에서 로컬 발진기를 요구한다. 바람직한 실시예에서 공통의 발진기는 위치 수신기, 전송기, CPU를 포함한 포지셔닝-유닛 장치의 모든 부분에 대한 클럭 정보를 생성한다. WAAS의 이종의 수신 경로 및 다운 컨버젼에 앞선 포지셔닝-유닛 장치 캐리어 주파수에 기인한 내부 주파수 타임로크를 계산할 때, 라인 바이어스와 그룹 지연이 고려된다.
도 6을 기준하여, 포지셔닝-유닛 장치(601-1,601-2,601-3 및 601-4)는 하늘이 잘 보이는 알려진 위치에 있고, 바람직하게는 언덕의 정상(602-1, 602-2) 및/또는 높은 빌딩(603-1, 603-2)과 같은 높은 위치에 있다. 필요하다면 방향성 수신 안테나(604-1, 604-2, 604-3 및 604-4) 역시 각각의 포지셔닝-유닛 장치(601-1, 601-2, 601-3 및 601-4)와 같이 통합될 수 있고 WAAS 정지위성을 향하게 할 수 있다(이러한 추가적인 안테나가 바람직하지만 본 방법에 필수적인 것은 아님). 배치되는 포지셔닝-유닛 장치상의 방향성 안테나는 다중경로를 이주시키고, WAAS 신호의 노이즈 비율로 수신 신호를 개선시키며, 이는 차례로 기준 시간축 정확도를 개 선시킨다. 각각의 포지셔닝-유닛 장치(601-1, 601-2, 601-3 및 601-4)는 WAAS 위성 신호(606)로 타임로크하고, 그 결과 피코세턴드의 정확성을 가지는, 네트워크에 동기화된 정확한 UTC를 만든다. 보행자(608)가 소지하는 위치 수신기(607)는 빌딩(609)내부에 놓여진다. WAAS 위성 신호(606)는 낮은 신호세기 때문에 빌딩(609)을 관통할 수 없다. 그러나 포지셔닝-유닛 장치(601-1, 601-2, 601-3 및 601-4)로부터의 포지셔닝-유닛 장치 신호(610-1, 610-2, 610-3 및 610-4)는 그것의 가까운 근접성 때문에 빌딩(609)을 관통할 수 있다. 위치 수신기(607)은 모든 4개의 포지셔닝-유닛 장치로부터 신호를 포지셔닝하는 포지셔닝-유닛 장치를 수신할 수 있고 이는 위성이 못 들어오는 위치에서 정확한 단일점 포지션 판단을 가능하게 한다. 추가하여, 한번 위치 수신기(607)가 포지션 솔루션을 계산하면, UTC는 정확하게 판단될 수 있다. 따라서 본 발명은 위성이 못 들어가는 위치에서 정확한 UTC 타임 전송을 또한 제공한다. 더욱이, 위치 수신기(607)가 빌딩(609)에 존재할 때, 보이는 임의의 포지셔닝-유닛 장치(601-1, 601-2, 601-3 및 601-4), WAAS 위성(605), 또는 GNSS 위성으로부터의 신호들은 포지션을 계산한 보행자에 포지션 인테그러티(integrity)를 부가하여 오버디터마인된(overdetermined) 포지션 솔루션을 형성하는데 사용될 수 있다.
중계
WAAS
기준
WAAS 위성이 잘 보이는 곳에 위치한 포지셔닝-유닛 장치는 다른 실시예에서 중간의 기준신호로서 또한 사용될 수 있다. WAAS 위성 신호를 수신할 수 없는 포 지셔닝-유닛 장치는 중간의 “백본(backbone)" 포지셔닝-유닛 장치를 그것의 타임 기준 소스로서 이용할 수 있다. 따라서 UTC는 모든 포지셔닝-유닛 장치가 기준 WAAS 위성이 잘 보이는 곳에 위치하지 않고 네트워크를 통하여 분포된다.
포지셔닝
-유닛 장치 기준
WAAS 위성을 이용할 수 없는 상황에서는 적어도 하나의 포지셔닝-유닛 장치가 포지셔닝-유닛 장치의 네트워크를 위한 시간축를 제공하는 것이 바람직하다. 이제 도 7을 기준하면, 알려진 위치에 놓여진 제 1 포지셔닝-유닛 장치(701)는 기준 전송기로써 지시되고, 그것의 내부적으로 생성된 클럭(702)으로부터의 시스템 시간축를 만든다. 알려진 위치에 놓여진 이후 두개의 포지셔닝-유닛 장치(703, 704)는 제 1 포지셔닝-유닛 장치 기준 포지셔닝 신호(705)로 타임로크 한다. 알려진 위치에 놓여졌으나 제 1 포지셔닝-유닛 장치(701)의 범위밖에 위치하는 네 번째 포지셔닝-유닛 장치(706)는 제 2 포지셔닝-유닛 장치 고유 포지셔닝 신호(707)를 타임로크 한다. 따라서 이 시스템은 중계 포지셔닝-유닛 장치를 통하여 정확히 캐스케이드된 타임 전송을 가능하게 한다. 위치 수신기(708)는 보이는 모든 포지셔닝-유닛 장치(701, 703, 704 및 706)에 의해 전송된 시간적으로 동기화된 포지셔닝 신호(709)를 수신하고, 단일점 포지션 솔루션을 순차적으로 계산한다. 추가로 위치 수신기(708)에서 계산된 시간은 기준 포지셔닝-유닛 장치(701)의 기준 클럭(702)에 시간순으로 동기화될 것이다. 포지셔닝-유닛 장치(701)내의 기준 클럭(702)의 임의의 시간값은, 만일 사용자가 포지션 판단에만 관계된다면 중요하지 않게 된다. 만일 사용자가 글로벌 시간축에 시간을 정렬시키고자 한다면, 기준 포지셔닝-유닛 장치(701)내의 기준 클럭(702)은 UTC로 조종되는 것이 필요하다.
GNSS
시간축에
의해 조종된
포지셔닝
-유닛 장치 기준
WAAS 위성을 이용할 수 없고 글로벌 시간축로의 정렬이 네트워크에 요구되는 상황에서는 기준 포지셔닝-유닛 장치가 GNSS 시간축에 의해 UTC로 조종되는 것이 바람직하다. GNSS 시간축는 위치 수신기를 요구하고, 알려진 위치에 위치하며, 적어도 하나의 GNSS 위성을 사용하여 타임 솔루션을 계산한다. 50 나노세컨드(ns) 단위의 시간 정확성은 이 기술을 이용하여 달성될 수 있다. 기준 포지셔닝-유닛 장치에 타임로크 된 포지셔닝-유닛 장치간의 상대적인 시간 정확성은 피코세컨드 수준에서 다뤄질 것이다.
인터네트워크
위치
솔루션
복수의 기준 전송기가 복수의 자치 네트워크를 만드는데 사용될 수 있다. 자치 네트워크는 자신의 고유하고 단일한 시간축를 가지고 이것은 기준 전송기에 의해 생성된다. 하나의 자치 네트워크 내부에 놓인 위치 수신기들은 단일점 위치 솔루션을 사용하여 위치, 속도(velocity), 시간(PVT)을 판단할 수 있다. 위치 수신기의 시간은 네트워크 시간축에 상대적으로 판단될 것이고, 이는 인트라 네트워크 위치 솔루션으로 불린다. 두개의 자치 네트워크의 가장자리에 위치하고, 양 네트워크의 포지셔닝-유닛 장치로부터 포지셔닝 신호를 수신하는 위치 수신기는 그 위치를 결정하기에 앞서 두개의 네트워크 시간축 사이에서 먼저 구별해야 한다. 이것은 인터네트워크 위치 솔루션으로 기술될 수 있고, 하나의 제 1 시간축를 선택하기 위해 표류하는 위치 수신기를 요구하며, 단일점 위치 솔루션을 계산하기에 앞서 제 2 시간축에 클럭 보정을 가한다.
바람직한 실시예에서, 포지셔닝-유닛 장치는 또한 그것의 네트워크 데이터에서 네트워크 인증(Network I.D.) 정보를 포함한다. 네트워크 I.D.는 포지셔닝-유닛 장치의 기준시간 상호연결성(interconnectivity)을 상세히 나타내고 그 결과 포지셔닝-유닛 장치와 위치 수신기는 각각의 보이는 포지셔닝-유닛 장치를 위한 기준 클럭 데이터의 근원(origin)과 비유적으로 말해 혈통(lineage)을 판단할 수 있다. 이것은 두 자치 네트워크의 가장자리에 위치한 포지셔닝-유닛 장치 또는 위치 수신기로 하여금 어느 포지셔닝-유닛 장치가 각각의 네트워크와 연동하는지 및 따라서 어느 포지셔닝-유닛 장치가 로빙 위치 수신기 위치계산 내에 클럭 보정을 요구하는지를 판단하게 한다. 각각의 포지셔닝-유닛 장치는 보이는 모든 다른 포지셔닝-유닛 장치로부터 네트워크 I.D. 정보를 수신하고, 이에 응답하여 고유한 네트워크 I.D. 정보를 생성하여 다른 모든 포지셔닝-유닛 장치 및 시야의 로빙 위치 수신기에 전송한다.
도 8을 기준하면, 포지셔닝-유닛 장치(801, 802)의 두개의 자치 네트워크가 묘사되어 있다. 포지셔닝-유닛 장치(801-1, 801-2 및 801-3)는 서로 보여지고, 포지셔닝 신호 (803-1, 803-2 및 803-3)를 통해 서로 통신한다. 포지셔닝-유닛 장 치(802-1, 802-2 및 802-3)는 서로 보여지고, 포지셔닝 신호(804-1, 804-2 및 804-3)를 통해 서로 통신한다. 두 네트워크(802-3)의 가장자리의 근처에 위치한 포지셔닝-유닛 장치는 인접 네트워크 포지셔닝-유닛 장치(802-3)로부터 포지셔닝-유닛 장치 포지셔닝 신호(804-3)을 수신하고, 그 고유의 네트워크(801) 시간축에 대한 인접한 네트워크 시간축간의 시간축 차이 또는 클럭 바이어스를 측정한다. 포지셔닝-유닛 장치(801-3)는 그 네트워크 데이터에서 인접하는 네트워크 포지셔닝-유닛 장치(802-1, 802-2 및 802-3)를 위한 클럭 보정을 전송하고, 이는 그것의 포지셔닝 신호(803-3)에 통합된다. 네트워크 보정값을 형성할 때, 자치 네트워크의 모든 클럭이 시간적으로 일관되도록 단지 하나의 인접 네트워크 포지셔닝-유닛 장치(802-3)로부터의 포지셔닝 신호만 포지셔닝-유닛 장치(801-3)로 수신되는 것이 필요하다. 추가로, 단지 하나의 포지셔닝-유닛 장치(801-3)만이 인접 네트워크의 측정을 필요로 한다. 포지셔닝 신호(803-3)의 네트워크 데이터에서 보낸 전송받은 네트워크 클럭 보정은 로빙 위치 수신기(805)로의 이후의 전송(803-1, 803-2)을 위해 고유의 네트워크(801)내의 다른 포지셔닝-유닛 장치로 수신되고 중계한다.
포지셔닝-유닛 장치(801-3) 포지셔닝 신호(803-3)의 네트워크 데이터에서 전송된 보정값은 네트워크들(801, 802)사이에서 로빙 위치 수신기(805)에 의해 수신된다. 로빙 위치 수신기는 포지셔닝-유닛 장치(801-3)로부터 수신된 네트워크 클럭 보정을 적용하고, 시야의 모든 포지셔닝-유닛 장치 포지셔닝 신호(803-1, 803-2, 803-3) 및 인접 네트워크 포지셔닝-유닛 장치 포지셔닝 신호(804-3)를 사용하여 단일점 위치 솔루션을 순차적으로 계산한다. 계산된 단일점 위치 솔루션과 함께, 로빙 위치 수신기(805) 클럭은 클럭 보정을 제공하는 네트워크(801) 시간축와 시간적으로 일관될 것이다. 추가로, 인접 네트워크 포지셔닝-유닛 장치(802-3)는 제 1 포지셔닝-유닛 장치(801-3)로부터 포지셔닝 신호(803-3)를 또한 수신할 수 있고, 고유의 네트워크(802) 시간축에 대한 제 1 네트워크(801)의 시간축 차이를 측정할 수 있다. 인접 네트워크 포지셔닝-유닛 장치(802-3)는 포지셔닝 신호(804-3)내의 네트워크 데이터에서 인접 네트워크 포지셔닝-유닛 장치(801-1, 801-2 및 801-3)를 위판 클럭 보정을 전송하고, 그 결과 필요하다면 로빙 위치 수신기(805)가 시간축를 선택하도록 한다.
다중 주파수
타임로크
바람직한 실시예에서 복수의 포지셔닝 신호는 각각의 포지셔닝-유닛 장치로부터 복수의 주파수상에서 전송된다. 위치 수신기는 복수의 포지셔닝 신호를 순차적으로 해석하여 정수의 캐리어 싸이클 모호성 해결(ambiguity resolution(AR))을 위한 소위 와이드 레인(Wide-lane)을 생성한다. RF 케리어 신호는 전송기 및 수신기 전자장치를 통과하는 동안의, “그룹 지연”로 알려진 타임 지연를 갖는다. 그룹 지연은 주파수와 주위 온도에 의존하여 수 나노세컨드 값으로 변동할 수 있다. 따라서 공통의 발진기에서 생성되고 동일한 전송경로를 따라 전송된 복수의 캐리서 주파수들은 캐리어 주파수 값에 따라 상이한 타임 지연를 갖고, 추가로 전송기 전자장치의 온도변화에 의해 야기되는 변화하는 타임 지연를 갖는다. 이것은 전송된 포지셔닝 신호들의 위상이 일관되지 못하게 하는 요인이 된다. 위상이 일관되지 못한 포지셔닝 신호는 와이드 레인 모호성 해결(AR) 프로세스에 광범위한 에러를 야기할 것이다.
포지셔닝-유닛 장치는 복수의 여러 가지 주파수 포지셔닝 신호들의 전송에 의해 기준 전송기로부터의 비일관적 위상 문제를 제거할 수 있고, 이 신호들은 그들의 각각의 들어오는 기준 포지셔닝 신호에 개별적으로 타임로크 된다. 포지셔닝-유닛 장치는 복수의 캐리어 주파수상에서 전송되는 복수의 포지셔닝 신호를 조종할 수 있는 복수의 조종된 전송기 클럭을 통합한다. 포지셔닝-유닛 장치 위치 수신기는 복수의 여러 가지 주파수 기준 포지셔닝 신호를 추적하고, 또한 복수의 여러 가지 슬레이브 포지셔닝 신호를 추적한다. 포지셔닝-유닛 장치는 각각의 여러 가지 주파수 기준 포지셔닝 신호를 각각의 여러 가지 주파수 슬레이브 포지셔닝 신호에 타임로크 하여, 그 결과 각각의 슬레이브 포지셔닝 신호는 기준 전송기와 시간순으로 동기화된다. 포지셔닝-유닛 장치는 복수의 여러 가지 주파수 포지셔닝 신호들을 송신하고, 이 신호들은 기준 전송기로부터 그룹 지연를 가지고 시간적으로 일관된다. 적어도 3개의 타임로크 되고 보여지는 포지셔닝-유닛 장치와 함께, 위치 수신기는 보여지는 각각의 포지셔닝-유닛 장치로부터 와이드 레인 정수 모호성 해결(AR)을 판단한다. 기준 전송기 그룹 지연는 AR 레인지(range) 에러를 만들고, 이것은 타임로크 된 포지셔닝-유닛 장치사이에서 공통이 된다. 따라서 레인지 에러를 유도하는 동일한 AR은 각각의 포지셔닝-유닛 장치 의사거리(Pseudorange)에서 명백하다. 위치 수신기는 이 공통의 의사거리 에러를 수신기 클럭 바이어스로 이해하고, 단일점 위치 계산에서 에러를 제거한다.
네트워크 좌표(co-ordinate) 프레임
타임로크의 필요조건은 기준 좌표 프레임에 대한 포지셔닝-유닛 장치 위치의 이해이다. 임의의 유효한 좌표 프레임이 사용될 수 있으나, 바람직한 실시예에서 어스 센터드 어스 픽스드(earth centered earth fixed(ECEF)) 좌표 프레임이 사용되고, 이는 또한 GPS 및 WAAS에 의해 사용된 좌표 프레임이다. 바람직한 실시예에서 포지셔닝-유닛 장치는 ECEF 좌표를 판단하기 위해 GNSS 및/또는 WAAS 및/또는 다른 포지셔닝 디바이스로부터 자기 조사를 한다.
전송 주파수
바람직한 실시예에서, 포지셔닝-유닛 장치는 2.4 GHz 에서 2.48 GHz의 허가되지 않은 ISM(Industrial Scientific Medical) 대역으로 전송한다. 2.4 GHz ISM 대역은, 규정의 제약없이, GPS와 같은 현재 네비게이션 시스템에 대한 간섭없이 포지셔닝-유닛 장치의 개발을 허용한다. 2.4 GHz ISM 대역은 또한 직접 시퀀스 확산 스펙트럼(Direct Sequence Spread Spectrum : DSSS) 위치 신호의 증가된 칩핑율(Chipping Rate)을 위해 사용될 수 있는 83.5 MHz 대역, 또는 와이드레인 정수 사이클 모호성 해결(widelane integer cycle ambiguity resolution)용 다중 캐리어의 사용을 허용한다.
*포지셔닝 -유닛 장치 하드웨어에 대한 설명
바람직한 실시예어서, 포지셔닝-유닛 장치는 위치 수신기, 전송기, 중앙처리장치(CPU), 및 공통 발진기를 포함한다. 위치 수신기는 각각 캐리어 성분, PRN 코드 성분, 및 데이터 성분을 포함하는 복수의 포지셔닝 신호를 수신가능한 복수의 수신 채널을 포함한다. 전송기는 적어도 하나의 RF 캐리어 생성기, 적어도 하나의 PRN 코드 생성기, 및 적어도 하나의 조종 클럭을 포함한다. CPU는 위치 수신기에 의해 수신된 포지셔닝 신호를 해석하는 수단, 전송기 조종 클럭을 제어하는 응답수단 및 네비게이션 데이터를 생성하는 수단을 포함한다. 공통 발진기는 포지셔닝-유닛 장치의 모든 구성에 대해 통일된 로컬 시간축을 제공한다.
도 9를 참조하면, 위치 수신기(902), 전송기(903), 중앙처리장치(CPU)(904), 및 공통 발진기(905)를 포함하는 포지셔닝-유닛 장치(901)가 도시된다. 위치 수신기(902)는 복수의 수신 채널(906)을 포함하고, 전송기(903)는 하나 이상의 캐리어 생성기(907), 하나 이상의 코드 생성기(908), 및 하나 이상의 조종 클럭(909)를 포함한다. CPU(904)는 위치 수신기 통신(910)을 위한 수단, 전송기 통신(911)을 위한 수단, 및 전송기 조종 클럭 통신(912)을 위한 수단을 포함한다.
포지셔닝
-유닛 장치 위치 수신기
포지셔닝-유닛 장치 위치 수신기는 기준 전송기로부터 적어도 하나의 기준 포지셔닝 신호를 수신 및 복조 가능한 적어도 하나의 수신 채널, 및 적어도 하나의 같은 곳에 배치된 전송기 슬레이브 포지셔닝 신호를 수신 및 복조 가능한 적어도 하나의 수신 채널을 포함한다. 바람직하게는, 포지셔닝-유닛 장치 위치 수신기는 증가된 정확성 및 보전성을 위한 복수의 기준 포지셔닝 신호를 수신 가능하다. 포지셔닝-유닛 장치 위치 수신기는 또한 바람직하게 2.4 GHz ISM 대역으로 전송하는 다른 포지셔닝-유닛 장치로부터 포지셔닝 신호, 및 마이크로파 L 대역 주파수로 전송하는 WAAS 및 GNSS 위성으로부터 포지셔닝 신호를 수신 가능해야 한다. 포지셔닝-유닛 장치 위치 수신기는 일반적인 GPS 수신기 설계에 사용된 동일한 방법론을 사용하여 포지셔닝 신호를 추적, 복조, 및 해석한다. GPS 수신기 처리 및 설계는 통상의 기술분야에서 잘 알려져 있고 여기서 설명할 주제는 아니다.
포지셔닝
-유닛 장치 전송기
포지셔닝-유닛 장치 전송기는 중요하고 결정적인 개선사항인 조종 전송기 클럭을 갖는 의사위성과 많은 유사점을 갖는다. 바람직한 실시예에서 조종 전송기 클럭은 직접 디지털 합성(Direct Digital Synthesis: DDS) 기술을 사용한 디지털 영역에서 생성된다. DDS 기술은 밀리헤르쯔 정확도로 제어된 주파수가 될 수 있는 디지털 생성 발진기를 생산하고, 따라서 전송기 클럭이 입력 기준 신호에 정밀하게 "종속되게" 한다. 전송기는 또한 적어도 하나의 무선 주파수(RF) 캐리어 생성기, 및 적어도 하나의 의사난수 (PRN) 코드 생성기를 포함한다. RF 캐리어 생성기는 바람직하게는 2.4 GHz ISM 대역으로 전송된 RF 정현파인 캐리어 성분을 생성하고, PRN 코드 생성기는 동일한 캐리어 주파수로 전송된 다른 의사난수의 코드 시퀀스들 사이에서 구분될 수 있는 고유한 코드 시퀀스를 포함하는 코드 성분을 생성한다. 복수의 코드는 캐리어 정수 사이클 해결이 로빙 위치 수신기에서 최소 식별 거리가 되게 하는 소위 "와이드레인"을 생성하도록 복수의 주파수 상에서 생성될 수 있다. 바람직한 실시예에서, 포지셔닝-유닛 장치 전송기는 시분할다중접속(Time Division Multiple Access: TDMA) 형태로 펄스를 발생시키고, 강한 CDMA 포지셔닝 신호는 동일한 캐리어 주파수로 전송된 약한 CDMA 포지셔닝 신호와 혼합되지 않는다. 이러한 현상은 "근거리/원거리 문제(near/far problem)로서 알려져 있고, 또한 통상의 기술분야에서 잘 알려져 있다.
포지셔닝
-유닛 장치 중앙처리장치
포지셔닝-유닛 장치 CPU는 이하로 구성된다.
a) 포지셔닝-유닛 장치의 현재 위치를 결정하는 수단.
위치 결정은 자체-조사 또는 수동 초기화를 통해 얻어질 수 있다.
자체-조사는 3차원 단일점 위치 최소 식별 거리를 결정하기 위해 포지셔닝-유닛 장치가 적어도 4개의 다른 기준 포지셔닝-유닛 장치를 고려하는 것이 필요하거나, 또는 선택적으로 포지셔닝-유닛 장치가 적어도 3개의 GNSS 위성과 적어도 하나의 기준 포지셔닝-유닛 장치가 고려될 수 있다. 이러한 실시예에서 기준 포지셔닝-유닛 장치는 포지셔닝-유닛 장치를 고려하여 코드 및 캐리어 디퍼렌셜 보정을 모든 GNSS 위성에 제공한다. 그 이후에 포지셔닝-유닛 장치는 기준 포지셔닝-유닛 장치와 관련된 정확한 위치를 계산한다.
수동 초기화는 소정의 위치에 포지셔닝-유닛 장치를 배치하게 함으로써 이루 어지고, 수동으로 지리적 좌표값을 포지셔닝-유닛 장치 메모리에 입력시킨다. 바람직한 실시예에서 제 1 포지셔닝-유닛 장치는 종속되는 포지셔닝-유닛 장치가 GNSS 위성 및 제 1 포지셔닝-유닛 장치로부터 자체조사하면서 정밀하게 알려진 좌표를 사용하여 수동으로 초기화된다.
b) 위치 수신기에 의한 기준 신호 탐색을 초기화하는 수단.
위치 수신기의 모든 채널은 고려중인 모든 기준 포지셔닝 신호라도 탐색하도록 세팅된다.
c) 적어도 하나의 기준 포지셔닝 신호를 얻고, 네비게이션 데이터 성분으로부터 네트워크 시간 및 네트워크 데이터를 추출하는 수단.
d) 기준 전송기로부터 포지셔닝-유닛 장치까지 신호 전달 지연을 결정하는 수단.
기준 전송기 위치 좌표는 기준 포지셔닝 신호 네비게이션 데이터로부터 먼저 추출되고, 알려진 포지셔닝-유닛 장치 위치와 비교된다. 기준 전송기 및 포지셔닝-유닛 장치 사이의 계산된 기하학적 거리는 비행시간(time-of-flight) 오프셋으로 전환된다.
e) 적절한 고유의 PRN 코드로 종속 전송기 코드 생성기를 초기화시키는 수단.
f) 종속 포지셔닝 신호의 네비게이션 데이터 성분으로서 전송되는 전송기에 적절한 네트워크 시간 및 네트워크 데이터를 생성하여 전달하는 수단.
네비게이션 데이터는 전송기-생성 RF 캐리어 상에서 연속적으로 변조된 전송 기-생성 PRN 코드 상에서 변조된다. 네비게이션 데이터는 타임-오브-위크(time-of-week) 정보, 포지셔닝-유닛 장치 위치, 및 다른 포지셔닝-유닛 장치와 GNSS 위성의 위치 및 상태와 같은 다른 네트워크 데이터를 포함한다.
g) 네트워크 시간 및 주파수의 근사값을 구하기 위해 계산된 비행시간 오프셋을 적용시키고 종속 전송기를 초기화하는 수단.
*h) 종속 포지셔닝 신호를 탐색하기 위해 위치 수신기를 초기화하는 수단.
i) 기준 및 종속 포지셔닝 신호 사이의 주파수 통일성을 얻기 위해 종속 포지셔닝 신호를 얻고 제어 루프를 적용시키는 수단.
CPU는 기준 및 종속 포지셔닝 신호의 순간 축적 캐리어 위상(ICP: Integrated Carrier Phase)차를 측정하고, 타임-록-루프(Time-Lock-Loop: TLL)로 알려진 제어루프를 적용한다. TLL의 출력은 ICP차를 0으로 하기 위해 보정값을 조종 전송기 클럭에 적용시킨다.
j) 종속 포지셔닝 신호 네비게이션 데이터 성분으로부터 전송된 종속 시간을 추출하고, 기준 포지셔닝 신호 및 종속 포지셔닝 신호 사이의 시간차를 결정하는 수단.
k) 기준 포지셔닝 신호 및 종속 포지셔닝 신호 사이의 시간차를 0으로 하기 위해 조종 전송기 클럭을 필요한 양으로 타임 슬루(Time Slew)하여, 이에 의해 종속 포지셔닝 신호가 기준 전송기 시간에 따라 시간순으로 배열되게 하는 수단.
l) 타임-록(Time-Lock) 상태를 선언하는 수단.
공통 발진기
공통 발진기는 통일된 로컬 시간축을 포지셔닝-유닛 장치의 모든 구성에 제공한다. 특히, 동일한 발진기는 위치 수신기, CPU, 및 조종 전송기 클럭을 구동하기 위해 사용된다. 통일된 로컬 시간축은 소위 주파수 추적 시스템(FTS: Frequency Tracking System)을 사용하여, 수신된 기준 포지셔닝 신호의 개방-루프 주파수 추적을 허용한다. FTS와 함께, 포지셔닝-유닛 장치 위치 수신기에 의해 측정된 수신된 기준 포지셔닝 신호 주파수는 포지셔닝-유닛 장치 조종 전송기 클럭에 직접 입력된다. 조종 전송기 클럭은 입력된 기준 포지셔닝 신호의 주파수 오프셋 값을 단순히 대리 실행하고, 따라서 공통 발진기 텀을 제거하고 기준 및 종속 포지셔닝 신호 사이의 기준/종속 주파수 록을 유지시킨다.
모바일 시스템에 대한 설명
로빙 위치 수신기는, 바람직하게는 2.4GHz ISM 대역으로 전송하는 포지셔닝-유닛 장치로부터 포지셔닝 신호를 수신 및 해석 가능한 복수의 수신 채널을 포함하는 것이 바람직하다. 로빙 위치 수신기는 또한 바람직하게는 L대역 주파수로 전송하는 GNSS 및 WAAS 위성으로부터 포지셔닝 신호를 수신 및 해석 가능하다. 로빙 위치 수신기는 바람직하게는 고려되는 모든 포지셔닝 신호로부터 네트워크 데이터를 포함하는 네비게이션 데이터를 복조 가능하다. 이는 포지셔닝-유닛 장치 네트워크 시간, GNSS 시간, 포지셔닝-유닛 장치 위치, 위성 위치, 및 다른 네트워크와 GNSS 데이터의 결정을 허용한다. 바람직한 실시예에서 네트워크 시간은 WASS 위성을 경유하여 GNSS 시간으로부터 파생되고, 이에 의해 네트워크 시간과 GNSS 시간이 시간-통일이 되게 한다. 로빙 위치 수신기는 또한 바람직하게는 고려되는 각 포지셔닝 신호에 대해 코드-기반 의사거리 측정을 하는 수단, 고려되는 각 포지셔닝 신호에 대해 캐리어 위상 측정을 하는 수단, 및 단일점 위치 결정을 사용하여 위치, 속도, 및 시간(PVT)을 구하는 수단을 포함한다. 단일점 위치 결정은 일반적으로 통상의 기술분야에서 잘 알려진 최소제곱회귀(least squares regression) 형식인 통상의 GPS 위치 솔루션을 사용하여 실행될 수 있다.
로딩 위치 수신기는 바람직하게는 정수 사이클 해결을 결정하는 수단을 포함한다. 바람직한 실시예에서 정수 사이클 모호성은 와이드-레인 기술을 사용하여 해결될 수 있다. 일단 정수 사이클 모호성이 해결되면, 정밀 캐리어 위상 의사거리는 로딩 위치 수신기로부터 포지셔닝-유닛 장치까지 결정된다. 정수 의사거리는 캐리어 사이클의 정수 번호(정수 성분)와 분수 캐리어 사이클 양(분수 성분 또는 위상 성분)을 포함하고, 알려지지 않은 위치 수신기 클럭 바이어스 때문에 의사거리로 불려진다. 타임-로크 된(Time-Locked) 포지셔닝-유닛 장치는 시간 통일성을 수십 피코세컨드(picosecond) 까지 나타내고, 단일점 위치 솔루션이 디퍼렌셜 보정할 필요없이 정밀한 캐리어 의사거리로부터 형성되게 한다.
위치 수신기는 통상의 기술분야에서 잘 알려지고 여기에서 주제로서 설명되지 않은 와이드-레인 모호성 해법 뿐만 아니라, 통상의 GPS 수신기 설계에서 사용된 동일한 방법론을 사용하여 타임-로크 된 포지셔닝-유닛 장치의 네트워크에 의해 생성된 포지셔닝 신호를 추적하고, 복조하고, 해석한다.
비록 상기 설명은 본 발명의 예시적인 실시예에 의해 제공되었지만, 당해 기술분야의 통상의 지식인에게 명백한 모든 이러한 및 다른 변경과 변형 모두는 여기에서 설명된 본 발명의 기술적 사상 및 범위 내에 있는 것을 알 수 있을 것이다.
도 1은 복수의 PUD에 브로드캐스트하는 싱글 기준 전송기와, 자치 단일점 위치 솔루션을 결정하는 로빙 위치 수신기를 통합하는 본 발명에 의한 타임-로크의 일 실시예의 도면,
도 2는 단일 포지셔닝-유닛 장치로 브로드캐스트 하는 단일 기준 전송기를 통합하는 본 발명에 따른 타임-로크의 다른 실시예의 도면,
도 3은 복수의 포지셔닝-유닛 장치로 브로드캐스트 하는 단일 기준 전송기를 통합하는 본 발명에 따른 타임-로크의 다른 실시예의 도면,
도 4는 중계 포지셔닝-유닛 장치로 브로드캐스트 하는 단일 기준 전송기를 통합하는 본 발명에 따른 타임-로크의 다른 실시예의 도면,
도 5는 단일 포지셔닝-유닛 장치로 브로드캐스트 하는 복수의 기준 전송기를 통합하는, 본 발명에 따른 타임-로크의 다른 실시예의 도면,
도 6은 4개의 포지셔닝-유닛 장치로 브로드캐스트하는 광역보강시스템(WAAS) 기준 전송기를 통합하는 본 발명에 따른 타임-로크의 다른 실시예의 도면, 이후 상기 포지셔닝-유닛 장치는 시간순으로 동기된 자신의 고유 포지셔닝 신호를 위성과 맞물린 환경에 위치해 있는 로빙 위치 수신기에 전송한다.
도 7은 3개의 다른 포지셔닝-유닛 장치로 브로드캐스트 하는 포지셔닝-유닛 장치 기준 전송기를 통합하는 본 발명에 따른 타임-로크의 다른 실시예의 도면, 이후 상기 포지셔닝-유닛 장치는 시간순으로 동기된 자신의 고유 포지셔닝 신호를 로빙 위치 수신기에 전송한다.
도 8은 포지셔닝-유닛 장치의 2개의 자치 네트워크와 상기 2개의 네트워크의 경계에 위치해 있는 로빙 위치 수신기를 통합하는 본 발명에 따른 타임-로크의 다른 실시예의 도면, 이후 상기 경계 포지셔닝-유닛 장치는 네트워크간 보정을 로빙 위치 수신기에 전송한다.
도 9는 본 발명에 따른 포지셔닝-유닛 장치 하드웨어의 블록도이다.
Claims (44)
- 하나 이상의 기준 전송기와 하나 이상의 포지셔닝-유닛 장치를 포함하는 포지셔닝 시스템에서 로빙(roving) 위치 수신기의 위치를 결정하는 방법에 있어서,(a) 알려진 위치에 있는 상기 하나 이상의 기준 전송기 각각이 상기 하나 이상의 기준 전송기의 시간축에 따라 기준 포지셔닝 신호를 생성하여 전송하는 단계;(b) 상기 하나 이상의 포지셔닝-유닛 장치 각각이,i) 상기 하나 이상의 기준 전송기 또는 상기 하나 이상의 포지셔닝-유닛 장치의 어느 하나 또는 둘 다에 의해 전송된 신호를 수신하여 해석하고;ⅱ) 상기 하나 이상의 기준 전송기와 상기 포지셔닝-유닛 장치 사이의 기준 포지셔닝 신호 전달 지연을 결정하고;ⅲ) 고유 포지셔닝 신호를 생성하여 전송하고;ⅳ) 상기 고유 포지셔닝 신호를 수신하여 해석하고;v) 단계 (i)에서 상기 수신되어 해석된 신호와 단계 (ⅳ)의 상기 고유 포지셔닝 신호를 비교하여 전송차를 추론하고;ⅵ) a) 단계(v)에서 상기 추론된 전송차; 및b) 단계(ⅱ)의 상기 기준 포지셔닝 신호 전달 지연; 에 따라, 상기 고유 포지셔닝 신호의 상기 생성과 전송을 계속해서 조정하여,상기 고유 포지셔닝 신호가 상기 기준 포지셔닝 신호에 연대순으로 동기화되도록 하는 단계,(c) 상기 로빙 위치 수신기가,i) 연대순으로 동기화된 상기 고유 포지셔닝 신호; 또는ⅱ) 상기 기준 포지셔닝 신호 및 상기 연대순으로 동기화된 고유 포지셔닝 신호;를 수신한 후, 차동 보정의 필요없이 자신의 위치를 계산하는 단계;를 포함하는 것을 특징으로 하는 위치 결정 방법.
- 제 1 항에 있어서,a) 상기 하나 이상의 기준 전송기가 시간-비간섭성(time-incoherence)을 나타내는 복수의 다수-주파수 포지셔닝 신호를 생성하여 전송하는 단계를 추가로 실시하고;b) 상기 하나 이상의 포지셔닝-유닛 장치 각각이,i) 복수의 다수-주파수 포지셔닝 신호를 생성하여 전송하는 것;ⅱ) 상기 하나 이상의 기준 전송기로부터 또는 다른 포지셔닝-유닛 장치를 포함하여 상기 포지셔닝-유닛 장치로부터 또는 둘 다로부터 상기 복수의 다수-주파수 포지셔닝 신호를 수신하는 것; 및ⅲ) 상기 하나 이상의 기준 전송기로부터 또는 상기 다른 포지셔닝-유닛 장치로부터 또는 둘 다로부터의 각각의 다수-주파수 포지셔닝 신호를 상기 포지셔닝-유닛 장치로부터의 각각의 다수-주파수 포지셔닝 신호에 독립적으로 연대순으로 동기화시키는 것;을 실시하여,상기 시간-비간섭성이 모든 다수-주파수 포지셔닝 신호 사이에 공통이 되도록 하는 단계를 추가로 포함하고,c) 상기 로빙 위치 수신기가,i) 상기 독립적으로 연대순으로 동기화된 다수-주파수 포지셔닝 신호를 수신하는 것; 및ⅱ) 상기 공통의 시간-비간섭성을 상기 수신기 클럭 바이어스로서 해석하는 것;을 실시하여정확한 위치 솔루션이 수신기 클럭 바이어스를 포함하여 계산되도록 하는 단계를 추가로 포함하는 것을 특징으로 하는 위치 결정 방법.
- 제 1 항에 있어서,단계 (c)에서 상기 로빙 위치 수신기의 계산된 위치는 캐리어 싱글-포인트 위치-속도-시간(PVT) 솔루션에 의해 결정되는 것을 특징으로 하는 위치 결정 방법.
- 제 1 항에 있어서,단계 (c)의 상기 수신된 신호는 의사랜덤 코드 성분을 포함하며, 상기 로빙 위치 수신기는 각 수신된 신호 내의 상기 의사랜덤 코드 성분으로부터 도출된 의사랜덤 코드 싱글-포인트 위치 솔루션을 결정하는 것을 특징으로 하는 위치 결정 방법.
- 제 1 항에 있어서,단계(c)의 상기 수신된 신호는 캐리어 성분을 포함하고 상기 로빙 위치 수신기는 각 수신된 신호 내의 상기 캐리어 성분으로부터 도출된 캐리어 싱글-포인트 위치 솔루션을 결정하는 것을 특징으로 하는 위치 결정 방법.
- 제 1 항에 있어서,단계 (c)의 상기 수신된 신호는 데이터 성분을 포함하고 상기 로빙 위치 수신기는 각각의 수신된 신호 내의 상기 데이터 성분으로부터 도출된 데이터 싱글-포인트 솔루션을 결정하는 것을 특징으로 하는 위치 결정 방법.
- 제 1 항에 있어서,단계 (c)에서 상기 로빙 위치 수신기의 계산된 위치는 위치-속도-시간(PVT) 솔루션을 계산함으로써 상기 하나 이상의 기준 전송기의 시간축을 결정하는 것을 특징으로 하는 위치 결정 방법.
- 제 1 항에 있어서,단계 (c)에서 상기 로빙 위치 수신기의 계산된 위치는 캐리어 싱글-포인트 포지셔닝 솔루션을 계산함으로써 상기 하나 이상의 기준 전송기의 시간축을 결정하는 것을 특징으로 하는 위치 결정 방법.
- 제 1 항에 있어서,단계 (c)의 상기 수신된 신호는 초기에 모호한 개수의 캐리어 사이클 성분과 분주기(fractional cycle) 성분으로 이루어진 캐리어 성분을 포함하는 것을 특징으로 하는 위치 결정 방법.
- 제 9 항에 있어서,단계 (c)에서 상기 로빙 위치 수신기의 계산된 위치는,a) 분해된(resolved) 정수 사이클 성분을 생성하기 위해 상기 초기에 모호한 개수의 캐리어 사이클 성분을 분해하는 단계;b) 상기 분해된 정수 사이클 성분과 상기 분주기 성분을 가산하여 정밀한 캐리어 위상 의사범위(pseudorange)를 생성하는 단계; 및c) 각각의 수신된 신호 내의 상기 정밀한 캐리어 위상 의사범위로부터 캐리어 싱글-포인트 위치 솔루션을 결정하는 단계;에 의해 결정되어,상기 캐리어 싱글-포인트 위치 솔루션이 차동 보정에 대한 필요없이 결정될 수 있도록 하는 것을 특징으로 하는 위치 결정 방법.
- 제 1 항에 있어서,상기 하나 이상의 기준 전송기 각각은 포지셔닝-유닛 장치, 광역보강시스템 위성, 광역항법시스템 위성, 의사위성, 또는 시간 정보를 포함하는 다른 장치를 포함하는 것을 특징으로 하는 위치 결정 방법.
- 로빙 위치 수신기가 자신의 위치를 결정할 수 있도록 하는 포지셔닝 시스템에 있어서,(a) 하나 이상의 기준 전송기의 시간축에 따라 기준 포지셔닝 신호를 생성하여 전송하는 상기 하나 이상의 기준 전송기,(b) 하나 이상의 포지셔닝-유닛 장치, 및(c) 상기 로빙 위치 수신기가 신호를 수신케 하는 수신 수단을 포함하고,상기 하나 이상의 포지셔닝-유닛 장치는,i) 상기 하나 이상의 기준 전송기 또는 상기 하나 이상의 포지셔닝-유닛 장치의 어느 하나 또는 둘 다에 의해 전송된 신호를 수신하여 해석하는 수단;ⅱ) 상기 하나 이상의 기준 전송기와 상기 포지셔닝-유닛 장치 사이의 기준 포지셔닝 신호 전달 지연을 결정하는 수단;ⅲ) 고유 포지셔닝 신호를 생성하여 전송하는 수단;ⅳ) 상기 고유 포지셔닝 신호를 수신하여 해석하는 수단;v) 수단 (i)에서 상기 수신되어 해석된 신호와 수단 (ⅳ)의 상기 고유 포지셔닝 신호를 비교하여 전송차를 추론하는 수단; 및ⅵ) a) 수단 (v)에서 상기 추론된 전송차; 및b) 수단 (ⅱ)의 상기 기준 포지셔닝 신호 전달 지연; 에 따라,상기 고유 포지셔닝 신호의 상기 생성과 전송을 계속해서 조정하는 수단;을 포함하여, 상기 고유 포지셔닝 신호가 상기 기준 포지셔닝 신호에 연대순으로 동기화되도록 하고,상기 수신 수단 (c)는,i) 상기 연대순으로 동기화된 고유 포지셔닝 신호; 또는ⅱ) 상기 기준 포지셔닝 신호 및 상기 연대순으로 동기화된 고유 포지셔닝 신호;를 수신하여, 차동 보정의 필요없이 자신의 위치를 계산하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 12 항에 있어서,a) 상기 하나 이상의 기준 전송기는 시간-비간섭성(time-incoherence)을 나타내는 복수의 다수-주파수 포지셔닝 신호를 생성하여 전송하고;b) 상기 하나 이상의 포지셔닝-유닛 장치는,i) 복수의 다수-주파수 포지셔닝 신호를 생성하여 전송하는 수단;ⅱ) 상기 하나 이상의 기준 전송기로부터 또는 다른 포지셔닝-유닛 장치로부터 또는 둘 다로부터 상기 복수의 다수-주파수 포지셔닝 신호를 수신하는 수단;ⅲ) 상기 하나 이상의 기준 전송기로부터 또는 상기 다른 포지셔닝-유닛 장치로부터 또는 둘 다로부터의 각각의 다수-주파수 포지셔닝 신호를 상기 포지셔닝-유닛 장치로부터의 각각의 다수-주파수 포지셔닝 신호에 독립적으로 연대순으로 동기화시키는 수단;을 추가로 포함하여, 상기 시간-비간섭성이 모든 다수-주파수 포지셔닝 신호 사이에 공통이 되도록 하고,c) 상기 로빙 위치 수신기는,i) 상기 독립적으로 연대순으로 동기화된 다수-주파수 포지셔닝 신호를 수신하는 수단; 및ⅱ) 상기 공통의 시간-비간섭성을 상기 수신기 클럭 바이어스로서 해석하는 수단;을 추가로 포함하여, 정확한 위치 솔루션이 수신기 클럭 바이어스를 포함하여 계산되도록 하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 12 항에 있어서,상기 수신 수단 (c)에서 상기 로빙 위치 수신기의 계산된 위치는 캐리어 싱글-포인트 위치-속도-시간(PVT) 솔루션에 의해 결정되는 것을 특징으로 하는 포지셔닝 시스템.
- 제 12 항에 있어서,상기 수신 수단 (c)의 상기 수신된 신호는 의사랜덤 코드 성분을 포함하고,상기 로빙 위치 수신기는 각각의 수신된 신호 내의 상기 의사랜덤 코드 성분으로부터 도출된 의사랜덤 코드 싱글-포인트 위치 솔루션을 결정하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 12 항에 있어서,상기 수신 수단 (c)의 상기 수신된 신호는 캐리어 성분을 포함하고,상기 로빙 위치 수신기는 각각의 수신된 신호 내의 상기 캐리어 성분으로부터 도출된 캐리어 싱글-포인트 위치 솔루션을 결정하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 12 항에 있어서,상기 수신 수단 (c)의 상기 수신된 신호는 데이터 성분을 포함하고,상기 로빙 위치 수신기는 각각의 수신된 신호 내의 상기 데이터 성분으로부터 도출된 데이터 싱글-포인트 위치 솔루션을 결정하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 12 항에 있어서,상기 수신 수단 (c)에서 상기 로빙 위치 수신기의 계산된 위치는 위치-속도-시간(PVT) 솔루션을 계산함으로써 하나 이상의 기준 전송기의 시간축을 결정하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 12 항에 있어서,상기 수신 수단 (c)에서 상기 로빙 위치 수신기의 계산된 위치는 캐리어 싱글-포인트 포지셔닝 솔루션을 계산함으로써 하나 이상의 전송기 시간축을 결정하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 12 항에 있어서,상기 수신 수단 (c)의 상기 수신된 신호는 초기에 모호한 개수의 캐리어 사이클 성분과 분주기 성분을 포함하는 캐리어 성분을 포함하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 20 항에 있어서,상기 수신 수단 (c)에서 상기 로빙 위치 수신기의 계산된 위치는,a) 상기 초기에 모호한 개수의 캐리어 사이클 성분을 분해하여 분해된 정수 사이클 성분을 생성하는 것;b) 상기 분해된 정수 사이클 성분을 상기 분주기 성분과 더하여 정밀한 캐리어 위상 의사범위(pseudorange)를 생성하는 것; 및c) 각각의 수신된 신호 내의 상기 정밀한 캐리어 위상 의사범위로부터 캐리어 싱글-포인트 위치 솔루션을 결정하는 것;에 의하여 정해지고,상기 캐리어 싱글-포인트 위치 솔루션이 차동 보정의 필요없이 결정될 수 있도록 하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 12 항에 있어서,상기 하나 이상의 기준 전송기의 각각은 포지셔닝-유닛 장치, 광역보강시스 템 위성, 광역항법시스템 위성, 의사위성, 또는 시간 정보를 포함하는 다른 장치를 포함하는 것을 특징으로 하는 포지셔닝 시스템.
- 하나 이상의 기준 전송기와 하나 이상의 포지셔닝-유닛 장치를 포함하는 포지셔닝 시스템에서 로빙 위치 수신기의 위치를 결정하는 방법에 있어서,(a) 알려진 위치에 있는 상기 하나 이상의 기준 전송기 각각이 상기 하나 이상의 기준 전송기의 시간축에 따라 기준 포지셔닝 신호를 생성하여 전송하는 단계;(b) 상기 하나 이상의 포지셔닝-유닛 장치 각각이,i) 상기 하나 이상의 기준 포지셔닝 신호를 수신하여 해석하고;ⅱ) 주파수 조종 클럭과 정렬되는 고유 포지셔닝 신호를 생성하여 전송하고;ⅲ) 상기 고유 포지셔닝 신호를 수신하여 해석하고;ⅳ) 상기 수신된 하나 이상의 기준 포지셔닝 신호(i)와 상기 수신된 고유 포지셔닝 신호(ⅲ) 사이의 주파수 차이를 측정하고;ⅴ) 상기 측정된 주파수 차이(ⅳ)로부터 도출된 양에 의해 상기 주파수 조종 클럭의 주파수를 조정하여 결과적으로 상기 고유 포지셔닝 신호를 조정하고;ⅵ) 상기 하나 이상의 기준 전송기와 상기 포지셔닝-유닛 장치 사이의 기준 포지셔닝 신호 전달 지연을 결정하고;ⅶ) 상기 수신된 기준 포지셔닝 신호(i)와 상기 수신된 고유 포지셔닝 신호(ⅲ) 사이의 시간 차이를 측정하고,ⅷ) 단계 (ⅶ)에서 측정된 상기 시간 차이로부터 도출된 시간 동안 상기 주파수 조종 클럭의 주파수와 단계 (ⅵ)에서 측정된 상기 전달 지연을 오프셋하여 결과적으로 상기 고유 포지셔닝 신호를 조정하여;상기 고유 포지셔닝 신호가 상기 기준 신호에 연대순으로 동기화되도록 하는 단계, 및(c) 상기 로빙 위치 수신기가,i) 상기 연대순으로 동기화된 고유 포지셔닝 신호; 또는ⅱ) 상기 기준 포지셔닝 신호와 상기 연대순으로 동기화된 고유 포지셔닝 신호를 수신한 후, 차동 보정의 필요없이 자신의 위치를 계산하는 단계;를 포함하는 것을 특징으로 하는 위치 결정 방법.
- 제 23 항에 있어서,a) 상기 하나 이상의 기준 전송기가 시간-비간섭성(time-incoherence)을 나타내는 복수의 다수-주파수 포지셔닝 신호를 생성하여 전송하는 단계;b) 상기 하나 이상의 포지셔닝-유닛 장치 각각이,i) 복수의 다수-주파수 포지셔닝 신호를 생성하여 전송하는 것;ⅱ) 상기 하나 이상의 기준 전송기로부터 또는 다른 포지셔닝-유닛 장치를 포함하여 상기 포지셔닝-유닛 장치로부터 또는 양자로부터 상기 복수의 다수-주파수 포지셔닝 신호를 수신하는 것; 및ⅲ) 상기 하나 이상의 기준 전송기로부터 또는 상기 다른 포지셔닝-유닛 장치로부터 또는 양자로부터의 각각의 다수-주파수 포지셔닝 신호를 상기 포지셔닝-유닛 장치로부터의 각각의 다수-주파수 포지셔닝 신호에 독립적으로 연대순으로 동기화시키는 것;을 실시하여상기 시간-비간섭성이 모든 다수-주파수 포지셔닝 신호 사이에 공통이 되도록 하는 단계를 추가로 포함하고,c) 상기 로빙 위치 수신기가,i) 상기 독립적으로 연대순으로 동기화된 다수-주파수 포지셔닝 신호를 수신하는 단계; 및ⅱ) 상기 공통의 시간-비간섭성을 수신기 클럭 바이어스로 해석하는 단계;를 실시하여,정확한 위치 솔루션이 상기 수신기 클럭 바이어스를 포함하여 계산되도록 하는 단계를 추가로 포함하는 것을 특징으로 하는 위치 결정 방법.
- 제 23 항에 있어서,단계 (c)에서 상기 로빙 위치 수신기의 계산된 위치는 캐리어 싱글-포인트 위치-속도-시간(PVT) 솔루션에 의해 결정되는 것을 특징으로 하는 위치 결정 방법.
- 제 23 항에 있어서,단계 (c)의 상기 수신된 신호는 의사랜덤 코드 성분을 포함하고,상기 로빙 위치 수신기는 각각의 수신된 신호 내의 의사범위 코드 성분으로 부터 도출된 의사랜덤 코드 싱글-포인트 위치 성분을 결정하는 것을 특징으로 하는 위치 결정 방법.
- 제 23 항에 있어서,단계 (c)의 상기 수신된 신호는 캐리어 성분을 포함하고,상기 로빙 위치 수신기는 각각의 수신된 신호 내의 상기 캐리어 성분으로부터 도출된 캐리어 싱글-포인트 위치 솔루션을 결정하는 하는 것을 특징으로 하는 위치 결정 방법.
- 제 23 항에 있어서,단계 (c)의 상기 수신된 신호는 데이터 성분을 포함하고,상기 로빙 위치 수신기는 각각의 수신된 신호 내의 상기 데이터 성분으로부터 도출된 데이터 싱글-포인트 위치 솔루션을 결정하는 것을 특징으로 하는 위치 결정 방법.
- 제 23 항에 있어서,단계 (c)에서 상기 로빙 위치 수신기의 계산된 위치는 위치-속도-시간(PVT) 솔루션을 계산함으로써 상기 하나 이상의 기준 전송기의 시간축을 결정하는 것을 특징으로 하는 위치 결정 방법.
- 제 23 항에 있어서,단계 (c)에서 상기 로빙 위치 수신기의 계산된 위치는 캐리어 싱글-포인트 포지셔닝 솔루션을 계산함으로써 상기 하나 이상의 기준 전송기의 시간축을 결정하는 것을 특징으로 하는 위치 결정 방법.
- 제 23 항에 있어서,단계 (c)의 상기 수신된 신호는 초기에 모호한 개수의 캐리어 사이클 성분과 분주기 성분을 가지는 캐리어 성분을 포함하는 것을 특징으로 하는 위치 결정 방법.
- 제 31 항에 있어서,단계 (c)에서 상기 로빙 위치 수신기의 계산된 위치가,a) 상기 초기에 모호한 개수의 캐리어 사이클 성분을 분해하여 분해된 정수 사이클 성분을 생성하고;b) 상기 분해된 정수 사이클 성분과 상기 분주기 성분을 가산하여 정확한 캐리어 위상 의사범위를 생성하고;c) 각 수신된 신호 내의 상기 정확한 캐리어 위상 의사범위로부터 캐리어 싱글-포인트 위치 솔루션을 결정함으로써 정해지고,이로써, 상기 캐리어 싱글-포인트 위치 솔루션이 차동 보정의 필요없이 결정될 수 있도록 하는 것을 특징으로 하는 위치 결정 방법.
- 제 23 항에 있어서,상기 하나 이상의 기준 전송기 각각은 포지셔닝-유닛 장치, 광역보강시스템 위성, 광역항법시스템 위성, 의사위성, 또는 시간 정보를 포함하는 다른 장치를 포함하는 것을 특징으로 하는 위치 결정 방법.
- 로빙 위치 수신기가 자신의 위치를 결정할 수 있도록 하는 포지셔닝 시스템에 있어서,(a) 하나 이상의 기준 전송기의 시간축에 따라 기준 포지셔닝 신호를 생성하여 전송하는 하나 이상의 기준 전송기;(b) 하나 이상의 포지셔닝-유닛 장치; 및(c) 상기 로빙 위치 수신기가 신호를 수신하게 하는 수신 수단;을 포함하고,상기 하나 이상의 포지셔닝-유닛 장치는,i) 상기 하나 이상의 기준 포지셔닝 신호를 수신하여 해석하는 수단;ⅱ) 주파수 조종 클럭과 정렬된 고유 포지셔닝 신호를 생성하여 전송하는 수단;ⅲ) 상기 고유 포지셔닝 신호를 수신하여 해석하는 수단;ⅳ) 상기 수신된 하나 이상의 기준 포지셔닝 신호(i)와 상기 수신된 고유 포지셔닝 신호(ⅲ) 사이의 주파수 차이를 측정하는 수단;ⅴ) 상기 측정된 주파수 차이(ⅳ)로부터 도출된 양에 의해 상기 주파수 조종 클럭의 주파수를 조정하여 결과적으로 상기 고유 포지셔닝 신호를 조정하는 수단;ⅵ) 상기 하나 이상의 기준 전송기와 상기 포지셔닝-유닛 장치 사이의 기준 포지셔닝 신호 전달 지연을 결정하는 수단;ⅶ) 상기 수신된 기준 포지셔닝 신호(i)와 상기 수신된 고유 포지셔닝 신호(ⅲ) 사이의 시간 차이를 측정하는 수단;ⅷ) 수단 (ⅶ)에서 측정된 상기 시간 차이로부터 도출된 시간 동안 상기 주파수 조종 클럭의 주파수와, 수단 (ⅵ)에서 측정된 상기 전달 지연을 오프셋하여 결과적으로 상기 고유 포지셔닝 신호를 조정하는 수단;을 포함하여, 상기 고유 포지셔닝 신호가 상기 기준 포지셔닝 신호에 연대순으로 동기화되도록 하고,상기 수신 수단 (C)는,i) 상기 연대순으로 동기화된 고유 포지셔닝 신호; 또는ⅱ) 상기 기준 포지셔닝 신호와 상기 연대순으로 동기화된 고유 포지셔닝 신호를 수신한 후, 차동 보정의 필요없이 자신의 위치를 계산하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 34 항에 있어서,a) 상기 하나 이상의 기준 전송기는 시간-비간섭성을 나타내는 복수의 다수-주파수 포지셔닝 신호를 생성하고 전송하고;b) 상기 하나 이상의 포지셔닝-유닛 장치는,i) 복수의 다수-주파수 포지셔닝 신호를 생성하여 전송하는 수단;ⅱ) 상기 하나 이상의 기준 전송기로부터 또는 다른 포지셔닝-유닛 장치를 포함하여 포지셔닝-유닛 장치로부터 또는 양자로부터 상기 복수의 다수-주파수 포지셔닝 신호를 수신하는 수단; 및ⅲ) 상기 하나 이상의 기준 전송기로부터 또는 상기 다른 포지셔닝-유닛 장치로부터 또는 양자로부터의 각각의 다수-주파수 포지셔닝 신호를 상기 포지셔닝-유닛 장치로부터의 각각의 다수-주파수 포지셔닝 신호에 독립적으로 연대순으로 동기화시키는 수단;을 추가로 포함하여, 상기 시간-비간섭성이 모든 다수-주파수 포지셔닝 신호 사이에 공통이 되도록하고,c) 상기 로빙 위치 수신기는,i) 상기 독립적으로 연대순으로 동기화된 다수-주파수 포지셔닝 신호를 수신하는 수단; 및ⅱ) 상기 공통의 시간-비간섭성을 수신기 클럭 바이어스로 해석하는 수단;을 추가로 포함하여, 정확한 위치 솔루션이 상기 수신기 클럭 바이어스를 포함하여 계산되도록 하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 34 항에 있어서,상기 수신 수단 (c)에서 상기 로빙 위치 수신기의 계산된 위치는 캐리어 싱글-포인트 위치-속도-시간(PVT) 솔루션에 의해 결정되는 것을 특징으로 하는 포지셔닝 시스템.
- 제 34 항에 있어서,상기 수신 수단 (c)의 상기 수신된 신호는 의사랜덤 코드 성분을 포함하고,상기 로빙 위치 수신기는 각각의 수신된 신호 내 상기 의사랜덤 코드 성분으로부터 도출된 의사랜덤 코드 싱글-포인트 위치 솔루션을 결정하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 34 항에 있어서,상기 수신 수단 (c)의 상기 수신된 신호는 캐리어 성분을 포함하고,상기 로빙 위치 수신기는 각각의 수신된 신호 내 상기 캐리어 성분으로부터 도출된 캐리어 싱글-포인트 위치 솔루션을 결정하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 34 항에 있어서,상기 수신 수단 (c)의 상기 수신된 신호는 데이터 성분을 포함하고,상기 로빙 위치 수신기는 각각의 수신된 신호 내 상기 데이터 성분으로부터 도출된 데이터 싱글-포인트 위치 솔루션을 결정하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 34 항에 있어서,상기 수신 수단 (c)에서 상기 로빙 위치 수신기의 계산된 위치는 위치-속도-시간(PVT) 솔루션을 계산함으로써 상기 하나 이상의 기준 전송기의 시간축을 결정하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 34 항에 있어서,상기 수신 수단 (c)에서 상기 로빙 위치 수신기의 계산된 위치는 캐리어 싱글-포인트 포지셔닝 솔루션을 계산함으로써 상기 하나 이상의 기준 전송기의 시간축을 결정하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 34 항에 있어서,상기 수신 수단 (c)의 상기 수신된 신호는 초기에 모호한 개수의 캐리어 사이클 성분과 분주기 성분을 가지는 캐리어 성분을 포함하는 것을 특징으로 하는 포지셔닝 시스템.
- 제 42 항에 있어서,상기 수신 수단 (c)에서 로빙 위치 수신기의 계산된 위치는,a) 상기 초기에 모호한 개수의 캐리어 사이클 성분을 분해하여 분해된 정수 사이클 성분을 생성하고;b) 상기 분해된 정수 사이클 성분과 상기 분주기 성분을 가산하여 정확한 캐리어 위상 의사범위(pseudorange)를 생성하고;c) 각각의 수신된 신호 내 상기 정확한 캐리어 위상 의사범위로부터 캐리어 싱글-포인트 위치 솔루션을 결정함으로써 정해지고,이로써, 상기 캐리어 싱글-포인트 위치 솔루션이 차동 보정의 필요없이 결정될 수 있는 것을 특징으로 하는 포지셔닝 시스템.
- 제 34 항에 있어서,상기 하나 이상의 기준 전송기의 각각은 포지셔닝-유닛 장치, 광역보강시스템 위성, 광역항법시스템 위성, 의사위성, 또는 시간 정보를 포함하는 다른 장치를 포함하는 것을 특징으로 하는 포지셔닝 시스템.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AUPR8634A AUPR863401A0 (en) | 2001-11-02 | 2001-11-02 | A method & device for precision time-lock |
| AUPR8634 | 2001-11-02 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020047006734A Division KR100929277B1 (ko) | 2001-11-02 | 2002-11-01 | 위치 네트워크를 시간순으로 동기화시키는 방법 및 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20070116283A KR20070116283A (ko) | 2007-12-07 |
| KR100973104B1 true KR100973104B1 (ko) | 2010-07-29 |
Family
ID=3832456
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020077025281A KR100951747B1 (ko) | 2001-11-02 | 2002-11-01 | 위치 결정 네트워크에서 주파수 간섭성을 생성하는 방법 및장치 |
| KR1020047006734A KR100929277B1 (ko) | 2001-11-02 | 2002-11-01 | 위치 네트워크를 시간순으로 동기화시키는 방법 및 장치 |
| KR1020077025280A KR100973104B1 (ko) | 2001-11-02 | 2002-11-01 | 위치 결정 네트워크에서 로빙 위치 수신기의 위치를결정하는 방법 및 시스템 |
| KR1020077025282A KR100951748B1 (ko) | 2001-11-02 | 2002-11-01 | 다수 위치 결정 네트워크에서 위치 솔루션을 결정하는 방법및 시스템 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020077025281A KR100951747B1 (ko) | 2001-11-02 | 2002-11-01 | 위치 결정 네트워크에서 주파수 간섭성을 생성하는 방법 및장치 |
| KR1020047006734A KR100929277B1 (ko) | 2001-11-02 | 2002-11-01 | 위치 네트워크를 시간순으로 동기화시키는 방법 및 장치 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020077025282A KR100951748B1 (ko) | 2001-11-02 | 2002-11-01 | 다수 위치 결정 네트워크에서 위치 솔루션을 결정하는 방법및 시스템 |
Country Status (13)
| Country | Link |
|---|---|
| US (4) | US7616682B2 (ko) |
| EP (4) | EP2624006B1 (ko) |
| JP (3) | JP4293907B2 (ko) |
| KR (4) | KR100951747B1 (ko) |
| CN (4) | CN101487882B (ko) |
| AU (2) | AUPR863401A0 (ko) |
| BR (1) | BR0213888A (ko) |
| CA (1) | CA2479579A1 (ko) |
| ES (4) | ES2532602T3 (ko) |
| IL (5) | IL161718A0 (ko) |
| MX (1) | MXPA04004245A (ko) |
| SG (3) | SG146449A1 (ko) |
| WO (1) | WO2003038469A1 (ko) |
Families Citing this family (107)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AUPR863401A0 (en) * | 2001-11-02 | 2001-11-29 | Qx Corporation Pty Ltd | A method & device for precision time-lock |
| KR100501949B1 (ko) * | 2001-11-06 | 2005-07-18 | 재단법인서울대학교산학협력재단 | 동기된 의사위성을 이용한 정밀 항법시스템 |
| GB2388264A (en) * | 2002-01-10 | 2003-11-05 | Roke Manor Research | GPS based networked time synchronised unit |
| KR101100531B1 (ko) | 2003-04-17 | 2011-12-30 | 세크러터리 오브 스테이트 포 디펜스 | 위성 측위 시스템에서의 유도된 대류층 오차 보정 방법 |
| AU2003904083A0 (en) * | 2003-08-05 | 2003-08-21 | Locata Corporation | A method & device for providing assistance data within a chronologically synchronized location network |
| DE10350746A1 (de) * | 2003-10-30 | 2005-06-16 | Infineon Technologies Ag | Verfahren und System zum Lokalisieren einer Position eines Objekts |
| US7356618B2 (en) * | 2003-12-31 | 2008-04-08 | Intel Corporation | Method and system for synchronizing platform clocks in a distributed wireless platform |
| US7266713B2 (en) * | 2004-01-09 | 2007-09-04 | Intel Corporation | Apparatus and method for adaptation of time synchronization of a plurality of multimedia streams |
| US7123186B2 (en) * | 2004-03-26 | 2006-10-17 | Topcon Gps, Llc | Controlling solution latency in a global navigation satellite receiver |
| US8352040B2 (en) * | 2005-02-28 | 2013-01-08 | Cardiac Pacemakers, Inc. | Diversity antenna system for communication with an implantable medical device |
| US7610065B2 (en) * | 2005-02-28 | 2009-10-27 | Cardiac Pacemakers, Inc. | Method and apparatus for antenna selection in a diversity antenna system for communicating with implantable medical device |
| US8428558B2 (en) * | 2005-04-22 | 2013-04-23 | Axiometric, Llc | System and method for routing in a wireless mesh network |
| US8126488B2 (en) * | 2005-04-22 | 2012-02-28 | Axiometric Llc | Wireless communication system and related methods |
| US8351409B2 (en) * | 2005-04-22 | 2013-01-08 | Axiometric, Llc | Timing synchronization in wireless mesh networks |
| US7330122B2 (en) | 2005-08-10 | 2008-02-12 | Remotemdx, Inc. | Remote tracking and communication device |
| US8981996B2 (en) | 2005-09-27 | 2015-03-17 | Qualcomm Incorporated | Position location using transmitters with timing offset and phase adjustment |
| US9354297B2 (en) * | 2005-09-27 | 2016-05-31 | Qualcomm Incorporated | Position location using phase-adjusted transmitters |
| US7511667B2 (en) * | 2006-02-22 | 2009-03-31 | Novariant, Inc. | Precise local positioning systems using ground-based transmitters |
| US7880676B2 (en) * | 2006-04-19 | 2011-02-01 | Wichorus Inc. | Method and system for hybrid positioning using partial distance information |
| US7511662B2 (en) * | 2006-04-28 | 2009-03-31 | Loctronix Corporation | System and method for positioning in configured environments |
| US9097783B2 (en) | 2006-04-28 | 2015-08-04 | Telecommunication Systems, Inc. | System and method for positioning using hybrid spectral compression and cross correlation signal processing |
| GB2443242A (en) * | 2006-07-03 | 2008-04-30 | Roke Manor Research | Means for alleviating a discontinuity in the coverage between adjacently located multilateration systems |
| US8797210B2 (en) * | 2006-07-14 | 2014-08-05 | Securealert, Inc. | Remote tracking device and a system and method for two-way voice communication between the device and a monitoring center |
| US7737841B2 (en) * | 2006-07-14 | 2010-06-15 | Remotemdx | Alarm and alarm management system for remote tracking devices |
| US7545318B2 (en) * | 2006-07-14 | 2009-06-09 | Remotemdx | Remote tracking system and device with variable sampling and sending capabilities based on environmental factors |
| WO2008073347A1 (en) | 2006-12-07 | 2008-06-19 | Venture Ad Astra, Llc | Space-time calibration system and method |
| US9008198B2 (en) * | 2007-01-05 | 2015-04-14 | Qualcomm Incorporated | Methods and apparatus for timing synchronization based on transitional pilot symbols |
| JP2008191012A (ja) * | 2007-02-05 | 2008-08-21 | Sumitomo Electric Ind Ltd | 通信システム、車載機、車両及び送信機 |
| CA2704264C (en) * | 2007-11-02 | 2015-03-17 | Novatel Inc. | System and method for distributing accurate time and frequency over a network |
| KR100976439B1 (ko) * | 2007-12-17 | 2010-08-18 | 한국전자통신연구원 | 무선 센서망에서의 이동 노드의 위치 추정 방법 |
| EP2083282A1 (en) * | 2008-01-28 | 2009-07-29 | Technische Universiteit Delft | Transmitter-receiver system |
| US7800531B2 (en) * | 2008-03-06 | 2010-09-21 | Atheros Communications, Inc. | High precision positioning system |
| US8232876B2 (en) | 2008-03-07 | 2012-07-31 | Securealert, Inc. | System and method for monitoring individuals using a beacon and intelligent remote tracking device |
| KR100957215B1 (ko) * | 2008-03-07 | 2010-05-11 | 한국전자통신연구원 | 무선 센서망에서 이동 노드의 위치 추정 방법 |
| US8406280B2 (en) * | 2008-03-18 | 2013-03-26 | Argon St, Inc. | System and method for mitigating severe multipath interference for geolocation and navigation |
| US7952512B1 (en) * | 2008-10-14 | 2011-05-31 | Sprint Communications Company L.P. | Mobile device enabled radar tags |
| US8249116B2 (en) * | 2008-12-24 | 2012-08-21 | Qualcomm Incorporated | Methods and systems for timing acquisition robust to channel fading |
| KR101260570B1 (ko) | 2009-03-10 | 2013-05-06 | 엘에스산전 주식회사 | 실시간 위치추적시스템에서의 시각 동기화 장치 및 그 방법 |
| ES2374485T3 (es) * | 2009-03-19 | 2012-02-17 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Método y aparato para estimar desviaciones de reloj, para sincronización virtual de relojes de funcionamiento libre y para determinar la posición de un objeto móvil. |
| US8035556B2 (en) * | 2009-08-17 | 2011-10-11 | Electronics And Telecommunications Research Institute | Apparatus for transmitting pseudollite signal based on single clock and positioning system using the same |
| US8451121B2 (en) * | 2009-09-10 | 2013-05-28 | PF Controls, LLC | Calibration and operational assurance method and apparatus for RFID object monitoring system |
| EP2330433A1 (en) * | 2009-09-30 | 2011-06-08 | Astrium Limited | Positioning system |
| US8159367B2 (en) * | 2009-10-16 | 2012-04-17 | Rf Controls, Llc | Methods for noise validated phase ranging RFID location |
| US8493182B2 (en) * | 2009-10-16 | 2013-07-23 | Rf Controls, Llc | Phase ranging RFID location system |
| US8907321B2 (en) * | 2009-12-16 | 2014-12-09 | Lehigh Univeristy | Nitride based quantum well light-emitting devices having improved current injection efficiency |
| US8514070B2 (en) | 2010-04-07 | 2013-08-20 | Securealert, Inc. | Tracking device incorporating enhanced security mounting strap |
| EP2591379B1 (en) * | 2010-07-06 | 2021-02-17 | Galileo Satellite Navigation Ltd. | Indoor satellite navigation system |
| US8463290B2 (en) | 2010-07-09 | 2013-06-11 | Digimarc Corporation | Mobile device positioning in dynamic groupings of communication devices |
| EP2420855A1 (en) * | 2010-08-20 | 2012-02-22 | EPFL Ecole Polytechnique Fédérale de Lausanne | Location system and corresponding calibration method |
| US8482434B2 (en) * | 2010-09-17 | 2013-07-09 | United Technologies Corporation | Wireless sensor for an aircraft propulsion system |
| JP2012122775A (ja) * | 2010-12-06 | 2012-06-28 | Nec Corp | 航空機位置測定システム、該システムに用いられる時刻同期方法及び時刻同期プログラム |
| CN105954765B (zh) * | 2011-08-02 | 2018-09-04 | 内克斯特纳夫有限公司 | 发送定位信号的方法、处理器可读存储器和位置定位系统 |
| CN102928857A (zh) * | 2011-08-10 | 2013-02-13 | 中国科学院国家天文台 | 卫星导航中多载波的定位方法 |
| RU2474838C1 (ru) * | 2011-08-19 | 2013-02-10 | Открытое акционерное общество "Российская корпорация ракетно-космического приборостроения и информационных систем" (ОАО "Российские космические системы") | Электронное устройство оперативного восстановления измерений псевдодальности |
| US9590411B2 (en) * | 2011-12-15 | 2017-03-07 | Schweitzer Engineering Laboratories, Inc. | Systems and methods for time synchronization of IEDs via radio link |
| AU2013211950B2 (en) * | 2012-01-25 | 2016-03-10 | Inova Ltd. | High-precision time synchronization for a cabled network in linear topology |
| FR2987136A1 (fr) * | 2012-02-17 | 2013-08-23 | St Microelectronics Sa | Procede de localisation d'un objet |
| US9282471B2 (en) | 2012-03-21 | 2016-03-08 | Digimarc Corporation | Positioning systems for wireless networks |
| KR20130127157A (ko) * | 2012-05-14 | 2013-11-22 | 한국전자통신연구원 | Gnss에서 크기가 제어된 항법신호를 송출하는 의사위성 및 방법 |
| US9423507B2 (en) * | 2012-05-30 | 2016-08-23 | Csr Technology Inc. | Methods and apparatuses for multipath estimation and correction in GNSS navigation systems |
| WO2014026197A2 (en) * | 2012-08-10 | 2014-02-13 | Aviat Networks, Inc. | Systems and methods for phase determination over a wireless link |
| CN102843164A (zh) * | 2012-08-27 | 2012-12-26 | 中国科学院国家授时中心 | 超宽带室内定位系统发射时序控制方法 |
| US9599719B2 (en) | 2012-10-19 | 2017-03-21 | Schweitzer Engineering Laboratories, Inc. | Detection of manipulated satellite time signals |
| ES2552829B1 (es) | 2012-10-19 | 2017-03-23 | Schweitzer Engineering Laboratories, Inc. | Conmutador de distribución de tiempo |
| EP2914099B1 (en) * | 2012-10-31 | 2021-03-24 | GEA Farm Technologies GmbH | A system and a method for real time detection of the position and behaviour of a plurality of animals |
| US10234535B2 (en) | 2012-10-31 | 2019-03-19 | Gea Farm Technologies Gmbh | Computer system for measuring real time position of a plurality of animals |
| KR102079350B1 (ko) | 2013-03-20 | 2020-02-19 | 삼성전자주식회사 | 캐리어 어그리게이션 처리 장치와 회로 |
| US9521508B2 (en) | 2013-06-19 | 2016-12-13 | Blackberry Limited | Architecture and method to 4G-mobile positioning |
| JP2015023333A (ja) * | 2013-07-17 | 2015-02-02 | 国立大学法人東北大学 | 無線通信システム、無線通信方法および無線通信用端末 |
| US9872293B1 (en) * | 2013-11-22 | 2018-01-16 | The United States Of America As Represented By The Administrator Of National Aeronautics And Space Administration | Intelligent data transfer for multiple sensor networks over a broad temperature range |
| CN104703274B (zh) * | 2013-12-04 | 2019-06-18 | 中兴通讯股份有限公司 | 一种带内伪卫星无线定位方法、系统及装置 |
| US9507010B2 (en) | 2013-12-20 | 2016-11-29 | Blackberry Limited | Method for improving clock accuracy in a wide area positioning pseudolite receiver system architecture |
| AU2015292265B2 (en) * | 2014-07-25 | 2018-04-19 | Locata Corporation Pty Ltd | Method and device for chronologically synchronizing a kinematic location network |
| JP6499837B2 (ja) * | 2014-08-11 | 2019-04-10 | 国立大学法人 名古屋工業大学 | 移動中継端末位置推定システム |
| ES2879277T3 (es) | 2015-03-06 | 2021-11-22 | Gatekeeper Systems Inc | Ubicación de bajo consumo de energía de objetos móviles |
| CN105182382A (zh) * | 2015-08-05 | 2015-12-23 | 中国电子科技集团公司第五十四研究所 | 一种伪卫星厘米级定位方法 |
| CN108137074B (zh) | 2015-09-04 | 2021-12-03 | 看门人系统公司 | 轮式车的运动估计 |
| US10001541B2 (en) | 2015-09-04 | 2018-06-19 | Gatekeeper Systems, Inc. | Magnetometer and accelerometer calibration for cart navigation system |
| CN105182386A (zh) * | 2015-09-15 | 2015-12-23 | 安徽省综合交通研究院股份有限公司 | 智能车载定位终端及定位方法 |
| US10264537B2 (en) * | 2015-11-13 | 2019-04-16 | Walter D. Barker | Time code controlled logic device |
| CN113472669B (zh) * | 2016-03-18 | 2022-09-16 | 华为技术有限公司 | 更新时钟同步拓扑的方法、确定时钟同步路径的方法及设备 |
| DE102016009197B3 (de) * | 2016-04-26 | 2017-07-27 | Diehl Metering Systems Gmbh | Verfahren und Einrichtung zu bidirektionaler Kommunikation zwischen Messgeräten und Datensammler |
| RU2725164C2 (ru) | 2016-05-13 | 2020-06-30 | Телефонактиеболагет Лм Эрикссон (Пабл) | Способы и пользовательское оборудование, радиопередающее устройство и сетевой узел для управления опорными сигналами позиционирования |
| WO2017204673A1 (en) | 2016-05-24 | 2017-11-30 | Limited Liability Company "Topcon Positioning Systems" | Method and apparatus for position determination of a mobile station using modified wi-fi signals |
| US11125888B2 (en) | 2016-06-06 | 2021-09-21 | Brian G. Agee | Multi-subband methods for reduced complexity, wideband blind resilient detection and geo-observable estimation of global navigation satellite signals |
| US10775510B2 (en) | 2016-06-06 | 2020-09-15 | Brian G. Agee | Blind despreading of civil GNSS signals for resilient PNT applications |
| US10405287B1 (en) * | 2016-07-27 | 2019-09-03 | Robotic Research, Llc | Covert timing synchronization |
| DE102017102116A1 (de) * | 2017-02-03 | 2018-08-09 | Jungheinrich Aktiengesellschaft | Verfahren und System zur Positionsbestimmung von mindestens einem Flurförderzeug |
| US10232869B2 (en) | 2017-03-08 | 2019-03-19 | Gatekeeper Systems, Inc. | Navigation systems for wheeled carts |
| KR102647167B1 (ko) | 2017-05-12 | 2024-03-13 | 로카타 코퍼레이션 피티와이 리미티드 | 사용자 플랫폼의 환경을 특징짓는 방법 및 장치 |
| US20190107632A1 (en) * | 2017-10-05 | 2019-04-11 | Panasonic Automotive Systems Company Of America, Division Of Panasonic Corporation Of North America | Delivery of precise time to gps receivers in an on-board unit over dedicated short range communications or c-v2x and way in dsrc connected vehicle network to enhance obe gps performance |
| JP6879235B2 (ja) * | 2018-03-13 | 2021-06-02 | 日本電信電話株式会社 | 時刻同期システム、管理装置、時刻同期方法およびプログラム |
| US11375468B2 (en) * | 2018-03-14 | 2022-06-28 | Locata Corporation Pty Ltd | Method and apparatus for synchronising a location network |
| EP3672305B1 (en) | 2018-12-20 | 2023-10-25 | HERE Global B.V. | Enabling flexible provision of signature data of position data representing an estimated position |
| EP3672310A1 (en) * | 2018-12-20 | 2020-06-24 | HERE Global B.V. | Identifying potentially manipulated radio signals and/or radio signal parameters based on radio map information |
| EP3672311A1 (en) | 2018-12-20 | 2020-06-24 | HERE Global B.V. | Device-centric learning of manipulated positioning |
| EP3671254A1 (en) | 2018-12-20 | 2020-06-24 | HERE Global B.V. | Service for real-time spoofing/jamming/meaconing warning |
| EP3672304A1 (en) | 2018-12-20 | 2020-06-24 | HERE Global B.V. | Statistical analysis of mismatches for spoofing detection |
| EP3671253A1 (en) | 2018-12-20 | 2020-06-24 | HERE Global B.V. | Crowd-sourcing of potentially manipulated radio signals and/or radio signal parameters |
| CN114729980A (zh) * | 2019-12-03 | 2022-07-08 | 洛克达股份有限公司 | 用于改进定位网络的弹性的方法和装置 |
| US11503563B2 (en) * | 2020-02-04 | 2022-11-15 | Alibaba Group Holding Limited | Distance estimation using signals of different frequencies |
| US20210250885A1 (en) * | 2020-02-10 | 2021-08-12 | Mediatek Singapore Pte. Ltd. | Method And Apparatus For Timing And Frequency Synchronization In Non-Terrestrial Network Communications |
| US20220128679A1 (en) * | 2020-10-26 | 2022-04-28 | James Albert Flynn | System For Accurate Geospatial Location And Time Transfer Using Radio Transmissions Without Satellite Signals |
| US20230048916A1 (en) * | 2020-10-26 | 2023-02-16 | James Albert Flynn | System For Accurate Geospatial Location And Time Transfer Using Radio Transmissions Without Satellite Signals |
| CN113093251B (zh) * | 2021-03-18 | 2022-05-27 | 中国电子科技集团公司第五十四研究所 | 一种基于伪卫星载波相位的高精度室内定位方法 |
| CN113507742B (zh) * | 2021-07-09 | 2022-04-29 | 电子科技大学 | 一种地基导航定位系统时间同步方法 |
| CN115278877B (zh) * | 2022-09-28 | 2022-12-13 | 长沙迪迈数码科技股份有限公司 | 基于移动式基站的井下uwb定位方法、系统及存储介质 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5982324A (en) * | 1998-05-14 | 1999-11-09 | Nortel Networks Corporation | Combining GPS with TOA/TDOA of cellular signals to locate terminal |
| US6281834B1 (en) * | 1999-01-08 | 2001-08-28 | Trueposition, Inc. | Calibration for wireless location system |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4472720A (en) * | 1980-03-24 | 1984-09-18 | Reesor Thomas W | Area navigational system using geosynchronous satellites |
| US4455651A (en) * | 1980-10-20 | 1984-06-19 | Equatorial Communications Company | Satellite communications system and apparatus |
| US4965534A (en) * | 1989-05-19 | 1990-10-23 | Scientific Atlanta | Channel frequency generator for use with a multi-frequency output generator |
| JPH04293907A (ja) * | 1991-03-22 | 1992-10-19 | Toyo Ink Mfg Co Ltd | 水系感光性樹脂組成物 |
| US5583513A (en) | 1993-03-24 | 1996-12-10 | Board Of Trustees Of The Leland Stanford Junior University | System and method for generating precise code based and carrier phase position determinations |
| JP3187222B2 (ja) * | 1993-10-19 | 2001-07-11 | 株式会社東芝 | 基準局の擬似gps信号送出システム |
| US5701328A (en) * | 1994-12-23 | 1997-12-23 | Stanford Telecommunications, Inc. | Chirped spread spectrum positioning system |
| CN1134123C (zh) * | 1995-09-20 | 2004-01-07 | 英国国防部 | 探测一个未知信号源的位置 |
| JP3405624B2 (ja) * | 1995-09-29 | 2003-05-12 | 株式会社東芝 | 静止衛星のgpsオーバーレイシステム |
| US5970400A (en) * | 1996-04-30 | 1999-10-19 | Magellan Corporation | Adjusting the timing and synchronization of a radio's oscillator with a signal from an SATPS satellite |
| US6101178A (en) * | 1997-07-10 | 2000-08-08 | Ksi Inc. | Pseudolite-augmented GPS for locating wireless telephones |
| US6873612B1 (en) * | 1997-10-30 | 2005-03-29 | Nortel Networks Limited | Methods and devices for asynchronous operation of a CDMA mobile communication system |
| US6353412B1 (en) * | 1998-03-17 | 2002-03-05 | Qualcomm, Incorporated | Method and apparatus for determining position location using reduced number of GPS satellites and synchronized and unsynchronized base stations |
| US6433739B1 (en) * | 1998-03-17 | 2002-08-13 | Qualcomm, Incorporated | Method and apparatus for synchronizing base stations using remote synchronizing stations |
| US6501393B1 (en) * | 1999-09-27 | 2002-12-31 | Time Domain Corporation | System and method for using impulse radio technology to track and monitor vehicles |
| SE9801092L (sv) * | 1998-03-30 | 1999-10-01 | Telia Ab | Arrangemang och metod vid ett mobilt radiokommunikationssystem |
| CA2330280A1 (en) * | 1998-04-24 | 1999-11-04 | Telefonaktiebolaget Lm Ericsson | Absolute time synchronization for mobile positioning in a cellular communications system |
| AUPP375498A0 (en) * | 1998-05-29 | 1998-06-18 | Small, David | A method for creating a network positioning system (NPS) |
| KR100506198B1 (ko) * | 1998-07-20 | 2005-08-08 | 삼성전자주식회사 | 지상 위치 탐색 시스템용의 다중 채널 디지털 수신기 |
| US6121928A (en) * | 1998-08-18 | 2000-09-19 | Trimble Navigation Limited | Network of ground transceivers |
| US6067045A (en) * | 1998-09-01 | 2000-05-23 | Hughes Electronics Corporation | Communication network initialization apparatus and method for fast GPS-based positioning |
| US20040198386A1 (en) * | 2002-01-16 | 2004-10-07 | Dupray Dennis J. | Applications for a wireless location gateway |
| US6829534B2 (en) * | 1999-04-23 | 2004-12-07 | Global Locate, Inc. | Method and apparatus for performing timing synchronization |
| US7649925B2 (en) * | 1999-06-14 | 2010-01-19 | Time Domain Corporation | Time transfer utilizing ultra wideband signals |
| JP3344377B2 (ja) * | 1999-07-15 | 2002-11-11 | 日本電気株式会社 | 疑似gps衛星 |
| GB9918348D0 (en) * | 1999-08-05 | 1999-10-06 | Koninkl Philips Electronics Nv | Location finding system and method |
| US6526265B1 (en) * | 1999-09-14 | 2003-02-25 | Skyworks Solutions, Inc. | Wireless transmitter having a modified translation loop architecture |
| EP1252533A2 (en) * | 2000-01-24 | 2002-10-30 | Integrinautics Corportion | Multi-frequency pseudolites for carrier-based differential-position determination |
| US6469663B1 (en) * | 2000-03-21 | 2002-10-22 | Csi Wireless Inc. | Method and system for GPS and WAAS carrier phase measurements for relative positioning |
| JP3544915B2 (ja) * | 2000-03-23 | 2004-07-21 | 株式会社東芝 | 航法支援gps測位システムの地上疑似衛星装置および地上疑似衛星装置の疑似gps衛星信号同期化方法 |
| KR100730549B1 (ko) | 2000-04-07 | 2007-06-22 | 인터디지탈 테크날러지 코포레이션 | 무선 통신 시스템용 기지국 동기 방법 및 시스템 |
| US6763241B2 (en) * | 2000-04-14 | 2004-07-13 | Varitek Industries, Inc. | Data communications synchronization using GPS receiver |
| US6665541B1 (en) * | 2000-05-04 | 2003-12-16 | Snaptrack, Incorporated | Methods and apparatuses for using mobile GPS receivers to synchronize basestations in cellular networks |
| US7366463B1 (en) * | 2000-05-05 | 2008-04-29 | The Directv Group, Inc. | Military UHF and commercial Geo-mobile system combination for radio signal relay |
| US7236883B2 (en) * | 2000-08-14 | 2007-06-26 | Sirf Technology, Inc. | Aiding in a satellite positioning system |
| US7373175B2 (en) * | 2001-03-09 | 2008-05-13 | Qualcomm Incorporated | Method and apparatus for timebase synchronization for use with cellular base stations |
| US6727847B2 (en) * | 2001-04-03 | 2004-04-27 | Rosum Corporation | Using digital television broadcast signals to provide GPS aiding information |
| US6965754B2 (en) * | 2001-10-09 | 2005-11-15 | Motorola, Inc. | Satellite positioning system receiver with reference oscillator circuit and methods therefor |
| AUPR863401A0 (en) * | 2001-11-02 | 2001-11-29 | Qx Corporation Pty Ltd | A method & device for precision time-lock |
| EP1558944A4 (en) * | 2002-10-04 | 2008-10-22 | Sigtec Navigation Pty Ltd | IMPROVEMENT TO A POSITIONING SYSTEM BY SATELLITE |
| US7170447B2 (en) * | 2003-02-14 | 2007-01-30 | Qualcomm Incorporated | Method and apparatus for processing navigation data in position determination |
-
2001
- 2001-11-02 AU AUPR8634A patent/AUPR863401A0/en not_active Abandoned
-
2002
- 2002-11-01 CA CA002479579A patent/CA2479579A1/en not_active Abandoned
- 2002-11-01 CN CN2008101443961A patent/CN101487882B/zh not_active Expired - Lifetime
- 2002-11-01 ES ES13001663.7T patent/ES2532602T3/es not_active Expired - Lifetime
- 2002-11-01 ES ES02771898T patent/ES2429434T3/es not_active Expired - Lifetime
- 2002-11-01 CN CN200810144395.7A patent/CN101644755B/zh not_active Expired - Lifetime
- 2002-11-01 ES ES13001660.3T patent/ES2540873T3/es not_active Expired - Lifetime
- 2002-11-01 IL IL16171802A patent/IL161718A0/xx unknown
- 2002-11-01 WO PCT/AU2002/001495 patent/WO2003038469A1/en active Application Filing
- 2002-11-01 AU AU2002336808A patent/AU2002336808B2/en not_active Expired
- 2002-11-01 KR KR1020077025281A patent/KR100951747B1/ko active IP Right Grant
- 2002-11-01 KR KR1020047006734A patent/KR100929277B1/ko active IP Right Grant
- 2002-11-01 ES ES13001662.9T patent/ES2539238T3/es not_active Expired - Lifetime
- 2002-11-01 JP JP2003540684A patent/JP4293907B2/ja not_active Expired - Fee Related
- 2002-11-01 CN CNB028259920A patent/CN100549722C/zh not_active Expired - Lifetime
- 2002-11-01 KR KR1020077025280A patent/KR100973104B1/ko active IP Right Grant
- 2002-11-01 CN CN2008101443976A patent/CN101487889B/zh not_active Expired - Lifetime
- 2002-11-01 EP EP20130001662 patent/EP2624006B1/en not_active Expired - Lifetime
- 2002-11-01 EP EP13001663.7A patent/EP2624007B1/en not_active Expired - Lifetime
- 2002-11-01 BR BR0213888-3A patent/BR0213888A/pt not_active Application Discontinuation
- 2002-11-01 SG SG200604212-1A patent/SG146449A1/en unknown
- 2002-11-01 SG SG200604213-9A patent/SG146450A1/en unknown
- 2002-11-01 KR KR1020077025282A patent/KR100951748B1/ko active IP Right Grant
- 2002-11-01 EP EP02771898.0A patent/EP1451606B1/en not_active Expired - Lifetime
- 2002-11-01 US US10/494,024 patent/US7616682B2/en active Active
- 2002-11-01 MX MXPA04004245A patent/MXPA04004245A/es active IP Right Grant
- 2002-11-01 EP EP20130001660 patent/EP2624008B1/en not_active Expired - Lifetime
- 2002-11-01 SG SG200604211-3A patent/SG138489A1/en unknown
-
2004
- 2004-04-30 IL IL188516A patent/IL188516A0/en unknown
- 2004-04-30 IL IL161718A patent/IL161718A/en unknown
-
2006
- 2006-08-16 US US11/504,309 patent/US7848397B2/en not_active Expired - Lifetime
- 2006-08-16 US US11/504,291 patent/US7474265B1/en not_active Expired - Lifetime
- 2006-08-18 US US11/506,468 patent/US7859462B2/en active Active
-
2007
- 2007-12-31 IL IL188514A patent/IL188514A/en active IP Right Grant
- 2007-12-31 IL IL188515A patent/IL188515A0/en unknown
-
2009
- 2009-02-25 JP JP2009068865A patent/JP4927117B2/ja not_active Expired - Fee Related
- 2009-02-25 JP JP2009068864A patent/JP4768043B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5982324A (en) * | 1998-05-14 | 1999-11-09 | Nortel Networks Corporation | Combining GPS with TOA/TDOA of cellular signals to locate terminal |
| US6281834B1 (en) * | 1999-01-08 | 2001-08-28 | Trueposition, Inc. | Calibration for wireless location system |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100973104B1 (ko) | 위치 결정 네트워크에서 로빙 위치 수신기의 위치를결정하는 방법 및 시스템 | |
| KR101034702B1 (ko) | 위치 네트워크 내에 원조 데이터를 제공하는 시스템 및방법 | |
| AU2002336808A1 (en) | A method and device for chronologically synchronizing a location network | |
| AU2006202938B2 (en) | Frequency Coherence within a Location Network | |
| AU2006202917B2 (en) | Inter-Network Operation of Multiple Location Networks |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20130701 Year of fee payment: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20140711 Year of fee payment: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20150710 Year of fee payment: 6 |