JP7697384B2 - 運搬装置 - Google Patents
運搬装置 Download PDFInfo
- Publication number
- JP7697384B2 JP7697384B2 JP2022014646A JP2022014646A JP7697384B2 JP 7697384 B2 JP7697384 B2 JP 7697384B2 JP 2022014646 A JP2022014646 A JP 2022014646A JP 2022014646 A JP2022014646 A JP 2022014646A JP 7697384 B2 JP7697384 B2 JP 7697384B2
- Authority
- JP
- Japan
- Prior art keywords
- arm
- ratchet pawl
- rack
- control unit
- ratchet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/063—Automatically guided
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/12—Platforms; Forks; Other load supporting or gripping members
- B66F9/18—Load gripping or retaining means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0019—End effectors other than grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Robotics (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Manipulator (AREA)
- Warehouses Or Storage Devices (AREA)
Description
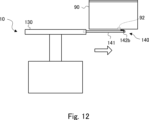
このような運搬装置によれば、アームを移動させるだけで、ラチェット爪が物体の係合部に係合する。このため、アームと物体とを係合させるための正確な位置合わせの制御を行う必要がなく、容易に物体を移動させることができる。
このような構成によれば、第1のラチェット爪を用いて、第1の方向に物体が移動され、第2のラチェット爪を用いて、第2の方向に物体が移動される。このため、アームを使って、物体を両方向に動かすことができる。
このような構成によれば、アームを回転させることで、物体の移動のために利用するラチェット爪が切り替えられる。このため、利便性が向上する。
このような構成によれば、2つのラチェット爪を含めたアーム全体の上下方向の幅を抑えることができる。このため、アームを狭い隙間に挿入することが容易になる。
このような構成によれば、物体を載置部へ移動させたり、載置部から外部へと移動させたりすることができる。
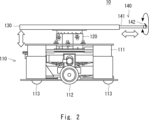
図1は、本実施形態に係る自律移動ロボット10の概略的構成を示す斜視図である。図2は、本実施形態に係る自律移動ロボット10の概略的構成を示す側面図である。図3は、本実施形態に係る自律移動ロボット10の概略的なシステム構成を示すブロック図である。
無線通信部160は、必要に応じてサーバ又は他のロボットなどと通信するために、無線通信する回路であり、例えば、無線送受信回路及びアンテナを含む。なお、自律移動ロボット10が他の機器と通信を行わない場合には、無線通信部160が省略されてもよい。
このように、制御部100は、コンピュータとして機能する装置である。
制御部100は、自律移動ロボット10の動作を制御する。すなわち、制御部100は、移動部110、伸縮部120、及びアーム140の動作を制御する。制御部100は、移動部110の各モータ114に制御信号を送信することで、各駆動車輪112の回転を制御し、ロボット本体111を任意の位置に移動させることができる。また、制御部100は、伸縮部120の駆動装置121に対して制御信号を送信することで、載置部130の高さを制御することができる。また、制御部100は、アーム駆動機構150に対して制御信号を送信することで、アーム140の水平方向の移動及びラチェット爪142の回転を制御することができる。
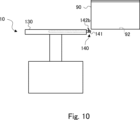
このように、制御部100は、ラチェット爪142の水平方向の直線運動を制御する。本実施の形態では、特に、制御部100は、係合部を有する面を備える物体の当該面に沿ってアーム140を移動させる。また、制御部100は、アーム140を当該アーム140の周方向に回転させることで、軸部141を回転軸としたラチェット爪142の回転を制御する。
80 ラック
90 物体
92 係合部
100 制御部
101 プロセッサ
102 メモリ
103 インタフェース
110 移動部
111 ロボット本体
112 駆動車輪
113 従動車輪
114 モータ
120 伸縮部
121 駆動装置
130 載置部
140 アーム
141 軸部
142 ラチェット爪
150 アーム駆動機構
160 無線通信部
Claims (3)
- 水平方向に移動可能なアームと、
前記アームの動作を制御する制御部と
を有し、
前記アームは、当該アームの前方に爪の先端が向いている第1のラチェット爪と、当該アームの後方に爪の先端が向いている第2のラチェット爪とを備え、
前記第1のラチェット爪と前記第2のラチェット爪は、前記アームの周方向において互いに離れて設けられており、
前記制御部は、前記アームを当該アームの周方向に回転させ、
前記制御部は、係合部を有する面を備える物体の当該面に沿って前記アームを移動させる
運搬装置。 - 前記第2のラチェット爪は、前記第1のラチェット爪に対して垂直に設けられている
請求項1に記載の運搬装置。 - 前記運搬装置は載置部を有し、前記アームは前記載置部から水平方向に出し入れされ、前記ラチェット爪は、前記物体の底面に設けられた前記係合部と係合する
請求項1又は2に記載の運搬装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022014646A JP7697384B2 (ja) | 2022-02-02 | 2022-02-02 | 運搬装置 |
| US18/161,376 US12351442B2 (en) | 2022-02-02 | 2023-01-30 | Conveyance apparatus |
| CN202310125958.2A CN116533205B (zh) | 2022-02-02 | 2023-02-01 | 搬运装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022014646A JP7697384B2 (ja) | 2022-02-02 | 2022-02-02 | 運搬装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023112751A JP2023112751A (ja) | 2023-08-15 |
| JP7697384B2 true JP7697384B2 (ja) | 2025-06-24 |
Family
ID=87431517
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022014646A Active JP7697384B2 (ja) | 2022-02-02 | 2022-02-02 | 運搬装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12351442B2 (ja) |
| JP (1) | JP7697384B2 (ja) |
| CN (1) | CN116533205B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2026070287A1 (ja) * | 2024-09-24 | 2026-04-02 | 京セラドキュメントソリューションズ株式会社 | 無人搬送車両 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015178141A (ja) | 2014-03-19 | 2015-10-08 | トヨタ自動車株式会社 | 搬送ロボット及び搬送方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6313908U (ja) | 1986-07-10 | 1988-01-29 | ||
| JPH05286522A (ja) * | 1992-04-14 | 1993-11-02 | Matsushita Electric Ind Co Ltd | 部品供給装置 |
| JP2782304B2 (ja) * | 1992-11-11 | 1998-07-30 | 株式会社日立製作所 | バケット移載方法 |
| JPH0769453A (ja) | 1993-07-09 | 1995-03-14 | Sankyu Inc | 集積貨物のコンテナへの積み降ろし方法及びそのための装置 |
| JP2962153B2 (ja) * | 1994-08-08 | 1999-10-12 | 株式会社ダイフク | 移載装置 |
| JPH1129207A (ja) * | 1997-07-11 | 1999-02-02 | Kongo Co Ltd | 荷移載装置 |
| JP2925520B2 (ja) * | 1997-08-12 | 1999-07-28 | 株式会社タイガーマシン製作所 | 多段式収納庫への台車の収納処理装置 |
| CN101891046B (zh) * | 2010-07-22 | 2011-09-07 | 无锡西埃尔斯机械有限公司 | 集装箱内置移动托盘 |
| JP5717797B2 (ja) * | 2013-06-26 | 2015-05-13 | ファナック株式会社 | 物品を搬送するためのロボットハンド、ロボットハンドを備えたロボットおよびロボットシステム、ならびにロボットハンドの制御方法 |
| CN105775544B (zh) * | 2016-05-11 | 2018-05-11 | 深圳普智联科机器人技术有限公司 | 具有简便定位功能的仓储系统和提取货物方法 |
| CN107458994B (zh) * | 2017-09-18 | 2023-05-30 | 广东顺威精密塑料股份有限公司 | 一种纵向双工位半自动堆高机 |
| CN114873116B (zh) * | 2017-11-03 | 2024-09-24 | 拉布拉多系统公司 | 用于物件取放和运输的室内自动机器人系统 |
| US10913641B2 (en) * | 2018-06-08 | 2021-02-09 | Attabotics Inc. | Storage units and robotic storage/retrieval vehicles for a three-dimensional storage system |
| JP7388289B2 (ja) * | 2020-05-15 | 2023-11-29 | 株式会社豊田自動織機 | 荷積付装置 |
-
2022
- 2022-02-02 JP JP2022014646A patent/JP7697384B2/ja active Active
-
2023
- 2023-01-30 US US18/161,376 patent/US12351442B2/en active Active
- 2023-02-01 CN CN202310125958.2A patent/CN116533205B/zh active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015178141A (ja) | 2014-03-19 | 2015-10-08 | トヨタ自動車株式会社 | 搬送ロボット及び搬送方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116533205A (zh) | 2023-08-04 |
| JP2023112751A (ja) | 2023-08-15 |
| US12351442B2 (en) | 2025-07-08 |
| CN116533205B (zh) | 2026-01-09 |
| US20230242387A1 (en) | 2023-08-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7552414B2 (ja) | 搬送システム及び搬送方法 | |
| JP7571597B2 (ja) | 運搬システム | |
| JP7563212B2 (ja) | 搬送システム及び搬送方法 | |
| JP7444014B2 (ja) | 運搬システム、及び運搬方法 | |
| JP7476819B2 (ja) | 搬送システム及び搬送方法 | |
| US12129115B2 (en) | Transport system and transport method | |
| JP7697384B2 (ja) | 運搬装置 | |
| JP2022124324A (ja) | 運搬システム | |
| US12251819B2 (en) | Transport system with protruding portions | |
| US20220258658A1 (en) | Transport system and transport method | |
| CN114852909A (zh) | 搬运系统、控制方法以及存储介质 | |
| CN114104145A (zh) | 搬运系统、搬运方法及程序 | |
| JP7524882B2 (ja) | 制御システム、制御方法、及びプログラム | |
| JP2024172377A (ja) | 搬送システム | |
| JP7750261B2 (ja) | 搬送システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240624 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240625 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240821 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250513 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250526 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7697384 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |