JP7635692B2 - 車両用サスペンション制御装置 - Google Patents
車両用サスペンション制御装置 Download PDFInfo
- Publication number
- JP7635692B2 JP7635692B2 JP2021163996A JP2021163996A JP7635692B2 JP 7635692 B2 JP7635692 B2 JP 7635692B2 JP 2021163996 A JP2021163996 A JP 2021163996A JP 2021163996 A JP2021163996 A JP 2021163996A JP 7635692 B2 JP7635692 B2 JP 7635692B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- road surface
- vehicle
- preview
- gain
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Landscapes
- Vehicle Body Suspensions (AREA)
Description
1-1.サスペンション及び路面変位関連値
図1は、実施の形態1に係る車両1の構成例を示す概略図である。車両1は、車輪2とサスペンション3を備えている。車輪2は、左前輪2FL、右前輪2FR、左後輪2RL、及び右後輪2RRを含んでいる。それら左前輪2FL、右前輪2FR、左後輪2RL、及び右後輪2RRのそれぞれに対してサスペンション3FL、3FR、3RL、及び3RRが設けられている。以下の説明では、特に区別の必要が無い場合、各車輪を車輪2と呼び、各サスペンションをサスペンション3と呼ぶ。
1-2-1.構成例
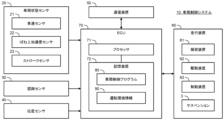
図4は、実施の形態1に係る車両制御システム10の構成例を示すブロック図である。車両制御システム10は、車両1に搭載され、車両1を制御する。車両制御システム10は、車両状態センサ20、認識センサ30、位置センサ40、通信装置50、走行装置60、及び電子制御ユニット(ECU)70を含んでいる。
図5は、車両1の運転環境を示す運転環境情報90の一例を示すブロック図である。運転環境情報90は、記憶装置72に格納される。運転環境情報90は、地図情報91、車両状態情報92、周辺状況情報93、及び位置情報94を含んでいる。
ECU70は、車両1の走行を制御する車両走行制御を実行する。車両走行制御は、操舵制御、駆動制御、及び制動制御を含む。ECU70は、走行装置60(操舵装置61、駆動装置62、及び制動装置63)を制御することによって車両走行制御を実行する。ECU70は、運転環境情報90に基づいて、車両1の運転を支援する運転支援制御を行ってもよい。運転支援制御としては、車線維持制御、衝突回避制御、自動運転制御、等が例示される。
1-3-1.構成例
図6は、実施の形態1に係るマップ管理システム100の構成例を示すブロック図である。マップ管理システム100は、各種の地図情報を管理するコンピュータである。地図情報の管理は、地図情報の生成、更新、提供、配信、等を含む。典型的には、マップ管理システム100は、クラウド上の管理サーバである。マップ管理システム100は、複数のサーバが分散処理を行う分散システムであってもよい。
マップ管理システム100が管理する地図情報の一つが、「ばね下変位マップ200」である。ばね下変位マップ200は、ばね下変位Zu(路面変位関連値)に関する地図である。ばね下変位マップ200は、記憶装置130に格納されている。なお、ばね下変位マップ200は、本開示に係る「路面の上下方向の変位に関連する路面変位関連値を位置と関連付けてマップ化した路面データマップ」の一例に相当する。
プロセッサ120は、通信装置110を介して、多数の車両1から情報を収集する。そして、プロセッサ120は、多数の車両1から収集した情報に基づいて、ばね下変位マップ200の生成及び更新を行う。以下、マップ生成/更新処理の例について更に詳しく説明する。
車両1の車両制御システム10が、ばね下変位マップ200のデータベースを保持し、自身のばね下変位マップ200の生成/更新を行ってもよい。つまり、マップ管理システム100は車両制御システム10に含まれていてもよい。
車両制御システム10のECU70は、通信装置50を介してマップ管理システム100と通信を行う。ECU70は、車両1の現在位置を含むエリアのばね下変位マップ200をマップ管理システム100から取得する。ばね下変位マップ200は、記憶装置72に格納される。そして、ECU70は、ばね下変位マップ200に基づいて、制振制御の一種である「プレビュー制御」を実行する。
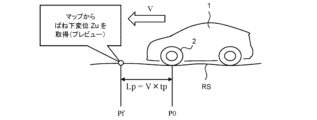
図9は、プレビュー制御を説明するための概念図である。図10は、プレビュー制御に関する処理の基本的な流れを示すフローチャートである。図9及び図10を参照して、プレビュー制御について説明する。プレビュー制御は、ばね上構造体5の振動を低減するために実行される。
m・Zs''=C(Zu'-Zs')+K(Zu-Zs)-Fc ・・・(1)
Fc=C・Zu'+K・Zu ・・・(2)
Fc=α・C・Zu'+β・K・Zu ・・・(3)
Fc=β・K・Zu ・・・(4)
プレビュー制御において、予測通過位置Pfのばね下変位Zuをばね下変位マップ200から取得する際、GNSS受信機等の位置センサ40を利用して取得される車両1の自己位置情報の誤差(以下、単に「位置誤差」とも称する)が大きいと、ばね下変位Zu(路面変位関連値)の推定精度が低下する可能性がある。より詳細には、位置誤差が大きいと、本来の車輪2の位置(すなわち、本来読み込むべき位置)と異なる位置のばね下変位Zuが取得されてしまう。つまり、取得されたばね下変位Zuは、本来の車輪2の位置での値から乖離したものとなる。その結果、適切なプレビュー制御を行うことが困難となる場合がある。具体的には、例えば、プレビュー制御の実行に起因してばね上構造体5の振動が増加する可能性がある。その結果、車両のユーザは、プレビュー制御の実行に起因する乗り心地の違和感を覚える可能性がある。
ステップS41において、ECU70は、位置信頼度Daを算出する。より詳細には、ECU70は、今回の時間ステップにおけるステップS31にて取得された車両1の現在位置P0(自己位置情報)の信頼度Daを算出する。位置信頼度Daは、位置(X,Y)の精度及び確からしさを示す指標値であり、現在位置P0の信頼度(精度及び確からしさの少なくとも一方)が高いほど大きい値となるように規定されている。このため、位置信頼度Daが低い場合には、GNSS受信機等の位置センサ40により取得された自己位置情報が示す車輪2の位置が本来の車輪2の位置から乖離している可能性が高い。
Da=a1×Dfix+a2×Ddop+a3×Dv+a4×Dma ・・・(5)
ステップS42において、ECU70は、ステップS41にて算出した位置信頼度Daが所定の閾値Dathより高いか否かを判定する。その結果、この判定結果がYesの場合(すなわち、現在位置P0の信頼度が高い場合)には、処理はステップS43に進む。一方、当該判定結果がNoの場合(すなわち、現在位置P0の信頼度が低い場合)には、処理はステップS44に進む。
ステップS43において、ECU70は、プレビューゲインGpvとして基本ゲインGpv0を選択する。その結果、上述のステップS34において、ECU70は、基本ゲインGpv0(式(3)では、制御ゲインα及びβのそれぞれの基本値)を用いて目標制御力Fc_t(要求制御量Xpv)を算出する。
ステップS44において、ECU70は、プレビューゲインGpvとして、基本ゲインGpv0より小さい抑制ゲインGpv1を選択する。抑制ゲインGpv1がプレビューゲインGpvとして用いられる場合、ステップS34にて算出される目標制御力Fc_t(要求制御量Xpv)は、基本ゲインGpv0がプレビューゲインGpvとして用いられる場合と比べて小さくなる。すなわち、位置信頼度Daが閾値Dathより高い場合と比べて、プレビュー制御が抑制される。
以上説明したように、実施の形態1によれば、プレビューゲインGpvの変更を利用して、位置信頼度Daが閾値Dath以下の場合には、位置信頼度Daが閾値Dathより高い場合と比べて抑制された態様でプレビュー制御が実行される。これにより、車両1の自己位置情報の取得誤差が大きい状況下においてプレビュー制御が抑制されずに実行される場合と比べて、プレビュー制御の実行に起因するばね上構造体5の振動悪化を抑制できる。このため、プレビュー制御の実行に起因する乗り心地の違和感を抑制できる。
ECU70は、アクチュエータ3Aを制御することにより、上述したプレビュー制御に加えて次のようなフィードバック制御を制振制御として実行してもよい。すなわち、当該フィードバック制御は、ばね上構造体5の振動を低減するために実行されるものである。当該フィードバック制御を伴ってプレビュー制御が行われる例における制御力Fcは、例えば、次の式(6)により表される。この例では、ECU70は、(6)式に従って、目標制御力Fc_tを算出する。
Fc=β・K・Zu+γ・Zs ・・・(6)
位置信頼度Daが低い場合に懸念される課題である「プレビュー制御の実行に起因するばね上構造体5の振動悪化」が生じる可能性は、特に、要求制御量Xpvの算出に用いられるばね下変位Zu(路面変位関連値)のデータに含まれる高周波成分が多い時に高くなる。その理由は次の通りである。ここで、路面変位Zrが短い周期で変動する路面(短周期路面)と、その周期が長い路面(長周期路面)とを比較する。位置誤差が路面変位関連値の取得に及ぼす影響は、長周期路面よりも短周期路面の方が、同じ量の位置ずれに対する路面変位関連値の変化量が大きくなるため大きくなる。そして、短周期路面から採集された路面変位関連値のデータは高周波成分を多く含む。したがって、路面変位関連値のデータに含まれる高周波成分が多い時に、振動悪化が生じる可能性が高くなる。
位置信頼度Daに基づく制御処理は、上述の「ゲイン変更処理(図11参照)」と「フィルタリング処理(図14参照)」とを組み合わせて実行されてもよい。
次に説明される実施の形態2は、位置信頼度Daに代えて車速Vに基づいてプレビュー制御が抑制される点において、上述した実施の形態1と相違している。
次に説明される実施の形態3は、位置信頼度Da及び車速Vに基づいてプレビュー制御が抑制される点において、上述した実施の形態1と相違している。
上述した実施の形態1~3においては、プレビュー制御(及びフィードバック制御)は、車両1の4つの車輪2(すなわち、全輪)を対象として行われた。しかしながら、プレビュー制御(及びフィードバック制御)の対象となる車輪(制御対象輪)は、必ずしも全輪に限られず、例えば、左右前輪のみ、又は左右後輪のみであってもよい。
2 車輪
3 サスペンション
3A アクチュエータ
4 ばね下構造体
5 ばね上構造体
10 車両制御システム
20 車両状態センサ
30 認識センサ
40 位置センサ
50 通信装置
60 走行装置
70 電子制御ユニット(ECU)
100 マップ管理システム
Claims (10)
- 制御対象輪のサスペンションストロークを制御するアクチュエータと、
前記アクチュエータを制御することにより、車両のばね上構造体の振動を低減するプレビュー制御を実行する電子制御ユニットと、
を備える車両用サスペンション制御装置であって、
前記電子制御ユニットは、
前記車両の自己位置情報を取得する位置取得処理と、
路面の上下方向の変位に関連する路面変位関連値を位置と関連付けてマップ化した路面データマップから、現在時刻からプレビュー時間後の前記制御対象輪の予測通過位置における路面変位関連値を取得する路面情報取得処理と、
前記自己位置情報の信頼度を算出する信頼度算出処理と、
前記予測通過位置における路面変位関連値に基づいて前記プレビュー制御を実行する制御処理と、
を実行し、
前記制御処理において、前記電子制御ユニットは、前記信頼度が第1閾値以下の場合には、前記信頼度が前記第1閾値より高い場合と比べて抑制された態様で前記プレビュー制御を実行し、
前記制御処理は、フィルタリング処理を含み、
前記フィルタリング処理は、前記信頼度が前記第1閾値以下の場合に、前記予測通過位置を含む前方路面における前記路面変位関連値のデータ若しくは当該データに基づく前記プレビュー制御の要求制御量に対してローパスフィルタを適用する処理である
ことを特徴とする車両用サスペンション制御装置。 - 前記制御処理は、前記信頼度が前記第1閾値以下の場合には、前記信頼度が前記第1閾値より高い場合と比べて前記プレビュー制御の要求制御量に含まれる制御ゲインを小さくするゲイン変更処理を含む
ことを特徴とする請求項1に記載の車両用サスペンション制御装置。 - 制御対象輪のサスペンションストロークを制御するアクチュエータと、
前記アクチュエータを制御することにより、車両のばね上構造体の振動を低減するプレビュー制御を実行する電子制御ユニットと、
を備える車両用サスペンション制御装置であって、
前記電子制御ユニットは、
前記車両の車速を取得する処理と、
前記車両の自己位置情報を取得する位置取得処理と、
路面の上下方向の変位に関連する路面変位関連値を位置と関連付けてマップ化した路面データマップから、現在時刻からプレビュー時間後の前記制御対象輪の予測通過位置における路面変位関連値を取得する路面情報取得処理と、
前記予測通過位置における路面変位関連値に基づいて前記プレビュー制御を実行する制御処理と、
を実行し、
前記制御処理において、前記電子制御ユニットは、前記車速が第2閾値以下の場合には、前記車速が前記第2閾値より高い場合と比べて抑制された態様で前記プレビュー制御を実行し、
前記制御処理は、フィルタリング処理を含み、
前記フィルタリング処理は、前記車速が前記第2閾値以下の場合に、前記予測通過位置を含む前方路面における前記路面変位関連値のデータ若しくは当該データに基づく前記プレビュー制御の要求制御量に対してローパスフィルタを適用する処理である
ことを特徴とする車両用サスペンション制御装置。 - 前記制御処理は、前記車速が前記第2閾値以下の場合には、前記車速が前記第2閾値より高い場合と比べて前記プレビュー制御の要求制御量に含まれる制御ゲインを小さくするゲイン変更処理を含む
ことを特徴とする請求項3に記載の車両用サスペンション制御装置。 - 制御対象輪のサスペンションストロークを制御するアクチュエータと、
前記アクチュエータを制御することにより、車両のばね上構造体の振動を低減するプレビュー制御を実行する電子制御ユニットと、
を備える車両用サスペンション制御装置であって、
前記電子制御ユニットは、
前記車両の車速を取得する処理と、
前記車両の自己位置情報を取得する位置取得処理と、
路面の上下方向の変位に関連する路面変位関連値を位置と関連付けてマップ化した路面データマップから、現在時刻からプレビュー時間後の前記制御対象輪の予測通過位置における路面変位関連値を取得する路面情報取得処理と、
前記自己位置情報の信頼度を算出する信頼度算出処理と、
前記予測通過位置における路面変位関連値に基づいて前記プレビュー制御を実行する制御処理と、
を実行し、
前記制御処理において、前記電子制御ユニットは、前記信頼度が第1閾値以下であること、及び、前記車速が第2閾値以下であることのうちの少なくとも一方の条件が満たされる場合には、前記信頼度が前記第1閾値より高く且つ前記車速が前記第2閾値より高い場合と比べて抑制された態様で前記プレビュー制御を実行し、
前記制御処理は、フィルタリング処理を含み、
前記フィルタリング処理は、前記少なくとも一方の条件が満たされる場合に、前記予測通過位置を含む前方路面における前記路面変位関連値のデータ若しくは当該データに基づく前記プレビュー制御の要求制御量に対してローパスフィルタを適用する処理である
ことを特徴とする車両用サスペンション制御装置。 - 前記制御処理は、前記少なくとも一方の条件が満たされる場合には、前記信頼度が前記第1閾値より高く且つ前記車速が前記第2閾値より高い場合と比べて前記プレビュー制御の要求制御量に含まれる制御ゲインを小さくするゲイン変更処理を含む
ことを特徴とする請求項5に記載の車両用サスペンション制御装置。 - 前記ゲイン変更処理において前記制御ゲインを小さくする場合、前記電子制御ユニットは、前記信頼度が低いほど前記制御ゲインを小さくする
ことを特徴とする請求項2又は6に記載の車両用サスペンション制御装置。 - 前記ゲイン変更処理において前記制御ゲインを小さくする場合、前記電子制御ユニットは、前記車速が低いほど前記制御ゲインを小さくする
ことを特徴とする請求項4又は6に記載の車両用サスペンション制御装置。 - 前記電子制御ユニットは、前記アクチュエータを制御することにより、前記プレビュー制御に加えて前記ばね上構造体の振動を低減するためのフィードバック制御を実行し、
前記ゲイン変更処理において前記制御ゲインを小さくする場合、前記電子制御ユニットは、前記フィードバック制御のフィードバックゲインを大きくする
ことを特徴とする請求項2、4、6、7、又は8に記載の車両用サスペンション制御装置。 - 前記フィルタリング処理において、前記電子制御ユニットは、前記ローパスフィルタの時定数に応じた前記路面変位関連値の前記データの位相遅れを相殺するように前記プレビュー時間を増加させる
ことを特徴とする請求項1、3、又は5に記載の車両用サスペンション制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021163996A JP7635692B2 (ja) | 2021-10-05 | 2021-10-05 | 車両用サスペンション制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021163996A JP7635692B2 (ja) | 2021-10-05 | 2021-10-05 | 車両用サスペンション制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023054955A JP2023054955A (ja) | 2023-04-17 |
| JP7635692B2 true JP7635692B2 (ja) | 2025-02-26 |
Family
ID=85986303
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021163996A Active JP7635692B2 (ja) | 2021-10-05 | 2021-10-05 | 車両用サスペンション制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7635692B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025030906A (ja) * | 2023-08-24 | 2025-03-07 | トヨタ自動車株式会社 | サスペンション制御システム |
| JP2025030719A (ja) * | 2023-08-24 | 2025-03-07 | トヨタ自動車株式会社 | サスペンション制御システム |
| JP2025035781A (ja) * | 2023-09-04 | 2025-03-14 | トヨタ自動車株式会社 | サスペンション制御システム |
| JP2026039645A (ja) * | 2024-08-23 | 2026-03-09 | トヨタ自動車株式会社 | 車両制御システム、マップ管理システム、及びパラメータマップ |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007147564A (ja) | 2005-11-30 | 2007-06-14 | Aisin Aw Co Ltd | 画像認識装置及び方法、並びに自車位置認識装置及び方法 |
| JP2008049862A (ja) | 2006-08-25 | 2008-03-06 | Toyota Motor Corp | 車両の挙動制御装置 |
| US20180154723A1 (en) | 2013-03-15 | 2018-06-07 | ClearMotion, Inc. | Self-driving vehicle with integrated active suspension |
| JP2019509926A (ja) | 2016-03-02 | 2019-04-11 | クリアモーション アクイジション 1 エルエルシー | 車両位置に基づく車両プラントのアクティブサスペンション制御 |
| JP2021138241A (ja) | 2020-03-04 | 2021-09-16 | トヨタ自動車株式会社 | 車両用プレビュー制振制御装置及び車両のプレビュー制振制御方法 |
-
2021
- 2021-10-05 JP JP2021163996A patent/JP7635692B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007147564A (ja) | 2005-11-30 | 2007-06-14 | Aisin Aw Co Ltd | 画像認識装置及び方法、並びに自車位置認識装置及び方法 |
| JP2008049862A (ja) | 2006-08-25 | 2008-03-06 | Toyota Motor Corp | 車両の挙動制御装置 |
| US20180154723A1 (en) | 2013-03-15 | 2018-06-07 | ClearMotion, Inc. | Self-driving vehicle with integrated active suspension |
| JP2019509926A (ja) | 2016-03-02 | 2019-04-11 | クリアモーション アクイジション 1 エルエルシー | 車両位置に基づく車両プラントのアクティブサスペンション制御 |
| JP2021138241A (ja) | 2020-03-04 | 2021-09-16 | トヨタ自動車株式会社 | 車両用プレビュー制振制御装置及び車両のプレビュー制振制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023054955A (ja) | 2023-04-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7635692B2 (ja) | 車両用サスペンション制御装置 | |
| JP7605072B2 (ja) | マップ管理方法及びマップ管理システム | |
| JP7544010B2 (ja) | マップデータ、マップ更新方法、車両制御方法、及び車両制御システム | |
| JP2025035781A (ja) | サスペンション制御システム | |
| JP7647463B2 (ja) | 車両位置推定方法及び車両制御システム | |
| US12485717B2 (en) | Suspension control system | |
| US12565074B2 (en) | Suspension control system | |
| JP7544009B2 (ja) | マップデータ、マップ更新方法、車両制御方法、及び車両制御システム | |
| JP7666261B2 (ja) | マップデータ、マップ更新方法、車両制御方法、及び車両制御システム | |
| JP7582144B2 (ja) | 車両用サスペンション制御装置、車両制御システム、及び車両用サスペンション制御方法 | |
| US20260061796A1 (en) | Vehicle damping control method and damping control system | |
| JP7615990B2 (ja) | 車両制御方法及び車両制御システム | |
| US20260054537A1 (en) | Vehicle control system | |
| JP2026028610A (ja) | 車両制御方法及び位置信頼度算出方法 | |
| KR20260035066A (ko) | 차량의 제진 제어 방법 및 제진 제어 시스템 | |
| WO2026042400A1 (ja) | 車両制御システム、マップ管理システム、及びパラメータマップ | |
| US20260056027A1 (en) | Vehicle management system | |
| JP2026048214A (ja) | 制御マップの管理方法及び管理システム | |
| KR20260035098A (ko) | 제어 맵의 관리 방법 및 관리 시스템 | |
| US20260056021A1 (en) | Control system | |
| KR20260026426A (ko) | 차량 제어 시스템 및 내비게이션 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241010 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241022 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241024 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250127 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7635692 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |